WO2025126425A1 - Information processing system, information processing device, information processing method, and program - Google Patents
Information processing system, information processing device, information processing method, and programDownload PDFInfo
- Publication number
- WO2025126425A1 WO2025126425A1PCT/JP2023/044865JP2023044865WWO2025126425A1WO 2025126425 A1WO2025126425 A1WO 2025126425A1JP 2023044865 WJP2023044865 WJP 2023044865WWO 2025126425 A1WO2025126425 A1WO 2025126425A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- information
- operation plan
- vehicles
- information processing
- plan
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B61—RAILWAYS
- B61L—GUIDING RAILWAY TRAFFIC; ENSURING THE SAFETY OF RAILWAY TRAFFIC
- B61L27/00—Central railway traffic control systems; Trackside control; Communication systems specially adapted therefor
- B61L27/10—Operations, e.g. scheduling or time tables
- B61L27/12—Preparing schedules
Definitions
- This disclosurerelates to an information processing system, an information processing device, an information processing method, and a program.
- Patent Document 1discloses a railway traffic control system that has a traffic command console that allows a train dispatcher to input traffic commands.
- the train dispatchermakes a comprehensive judgment on the train delay time, the congestion level at the station, the shift in users, and the on-site situation of accidents and breakdowns, and then changes the train schedule.
- This disclosurehas been made in consideration of the above problems, and one exemplary objective thereof is to provide a technology for appropriately updating operation plans in a non-personal manner.
- An information processing systemincludes a first acquisition means for acquiring an operation plan for one or more vehicles operating along a predetermined trajectory, a second acquisition means for acquiring operation status information related to at least any operation status of the one or more vehicles, and a first generation means for generating an updated operation plan by referring to the operation plan and the operation status information and using a trained model.
- An information processing deviceincludes a first acquisition means for acquiring an operation plan for one or more vehicles operating along a predetermined trajectory, a second acquisition means for acquiring operation status information related to at least any operation status of the one or more vehicles, and a first generation means for generating an updated operation plan by referring to the operation plan and the operation status information and using a trained model.
- An information processing methodincludes a first acquisition process in which at least one processor acquires an operation plan for one or more vehicles operating along a predetermined trajectory, a second acquisition process in which the at least one processor acquires operation status information related to at least any operation status of the one or more vehicles, and a first generation process in which the at least one processor references the operation plan and the operation status information and generates an updated operation plan using a trained model.
- a program according to an exemplary aspect of the present disclosureis a program that causes a computer to function as an information processing device, and causes the computer to function as a first acquisition means that acquires an operation plan for one or more vehicles that are operated along a predetermined trajectory, a second acquisition means that acquires operation status information related to at least one of the operation statuses of the one or more vehicles, and a first generation means that references the operation plan and the operation status information and generates an updated operation plan using a trained model.
- An exemplary aspect of the present disclosureprovides an exemplary effect of providing technology that appropriately updates operation plans in a non-personal manner.
- 1is a block diagram showing a configuration of an information processing system according to the present disclosure.
- 1is a block diagram showing a configuration of an information processing device according to the present disclosure.
- 1is a flow diagram showing the flow of an information processing method according to the present disclosure.
- 1is a block diagram showing a configuration of an information processing system according to the present disclosure.
- 1is a block diagram showing a configuration of an information processing device according to the present disclosure.
- FIG. 13is a diagram illustrating an example of an updated operation plan according to the present disclosure.
- 1is a flow diagram showing a flow of processing executed in an information processing system according to the present disclosure.
- FIG. 13is a diagram showing an example of information to be provided according to the present disclosure.
- 1is a block diagram showing a configuration of an information processing system according to the present disclosure and a computer that functions as an information processing device.
- a first exemplary embodimentwhich is an example of an embodiment of the present invention, will be described in detail with reference to the drawings.
- This exemplary embodimentis the basic form of each exemplary embodiment described later.
- the scope of application of each technical means adopted in this exemplary embodimentis not limited to this exemplary embodiment. That is, each technical means adopted in this exemplary embodiment can be adopted in other exemplary embodiments included in this disclosure to the extent that no particular technical obstacle occurs.
- each technical means shown in the drawings referred to for explaining this exemplary embodimentcan also be adopted in other exemplary embodiments included in this disclosure to the extent that no particular technical obstacle occurs.
- Fig. 1is a block diagram showing the configuration of the information processing system 1.
- the information processing system 1includes a first acquisition unit 11, a second acquisition unit 12, and a first generation unit 13.
- the first acquisition unit 11, the second acquisition unit 12, and the first generation unit 13respectively realize a first acquisition means, a second acquisition means, and a first generation means.
- the systemincludes a first acquisition unit 11, a second acquisition unit 12, and a first generation unit 13. Also, as shown in FIG. 1, the first acquisition unit 11, the second acquisition unit 12, and the first generation unit 13 are each communicatively connected via a network N.
- the specific configuration of the network Ndoes not limit this exemplary embodiment, but examples include a wireless LAN (Local Area Network) or a wired LAN. As other examples, a WAN (Wide Area Network), a public line network, a mobile data communication network, or a combination of these networks can be used.
- the first acquisition unit 11acquires an operation plan for one or more vehicles that are operated along a predetermined trajectory.
- the first acquisition unit 11supplies the acquired operation plan to the first generation unit 13.
- the second acquisition unit 12acquires operation status information related to at least one of the operation statuses of one or more vehicles.
- the second acquisition unit 12supplies the acquired operation status information to the first generation unit 13.
- the first generation unit 13refers to the operation plan acquired by the first acquisition unit 11 and the operation status information acquired by the second acquisition unit 12, and generates an updated operation plan using the trained model.
- the information processing system 1is configured to include a first acquisition unit 11 that acquires an operation plan for one or more vehicles operated along a predetermined trajectory, a second acquisition unit 12 that acquires operation status information related to at least any operation status of the one or more vehicles, and a first generation unit 13 that generates an updated operation plan using a trained model by referring to the operation plan acquired by the first acquisition unit 11 and the operation status information acquired by the second acquisition unit 12. Therefore, the information processing system 1 has an effect of being able to appropriately update the operation plan in a non-personal manner.
- Fig. 2is a block diagram showing the configuration of the information processing device 2.
- the information processing device 2includes a first acquisition unit 11, a second acquisition unit 12, and a first generation unit 13.
- the first acquisition unit 11, the second acquisition unit 12, and the first generation unit 13respectively realize a first acquisition means, a second acquisition means, and a first generation means.
- the first acquisition unit 11acquires an operation plan for one or more vehicles that are operated along a predetermined trajectory.
- the first acquisition unit 11supplies the acquired operation plan to the first generation unit 13.
- the second acquisition unit 12acquires operation status information related to at least one of the operation statuses of one or more vehicles.
- the second acquisition unit 12supplies the acquired operation status information to the first generation unit 13.
- the first generation unit 13refers to the operation plan acquired by the first acquisition unit 11 and the operation status information acquired by the second acquisition unit 12, and generates an updated operation plan using the trained model.
- the information processing device 2employs a configuration including a first acquisition unit 11 that acquires an operation plan for one or more vehicles operating along a predetermined trajectory, a second acquisition unit 12 that acquires operation status information related to at least any operation status of the one or more vehicles, and a first generation unit 13 that generates an updated operation plan using a trained model by referring to the operation plan acquired by the first acquisition unit 11 and the operation status information acquired by the second acquisition unit 12. Therefore, the information processing device 2 can obtain the same effects as those of the information processing system 1 described above.
- Flow of information processing method S1The flow of the information processing method S1 will be described with reference to Fig. 3.
- Fig. 3is a flow diagram showing the flow of the information processing method S1.
- the information processing method S1includes a first acquisition process S11, a second acquisition process S12, and a first generation process S13.
- First acquisition process S11In a first acquisition process S11, the first acquisition unit 11 acquires an operation plan for one or more vehicles that are operated along a predetermined trajectory. The first acquisition unit 11 supplies the acquired operation plan to the first generation unit 13.
- the second acquisition unit 12acquires operation status information related to at least any operation status of one or more vehicles.
- the second acquisition unit 12supplies the acquired operation status information to the first generation unit 13.
- the first generation unit 13refers to the operation plan acquired by the first acquisition unit 11 and the operation status information acquired by the second acquisition unit 12, and generates an updated operation plan using the learned model.
- the information processing method S1employs a configuration including a first acquisition process S11 in which the first acquisition unit 11 acquires an operation plan for one or more vehicles operating along a predetermined trajectory, a second acquisition process S12 in which the second acquisition unit 12 acquires operation status information related to at least any operation status of the one or more vehicles, and a first generation process S13 in which the first generation unit 13 refers to the operation plan acquired by the first acquisition unit 11 and the operation status information acquired by the second acquisition unit 12, and generates an updated operation plan using a trained model. Therefore, according to the information processing method S1, the same effect as that of the above-mentioned information processing system 1 can be obtained.
- Fig. 4is a block diagram showing the configuration of the information processing system 1A.
- the information processing system 1Aincludes an information processing device 2A, an operation management device 50, an inspection planning device 51, signals 52, crew terminals 53, sensors 54, a situation understanding support device 55, an advertising planning device 56, a shop planning device 57, a late-night bus operation planning device 58, and an accommodation demand forecasting device 59.
- the operation management device 50realizes an operation control means.
- the situation understanding support device 55realizes a second generation means and a third generation means.
- the information processing device 2Areferences an operation plan OP for one or more vehicles operating along a predetermined trajectory and operation status information OS related to at least any of the operation statuses of the one or more vehicles, and generates an updated operation plan UOP.
- the information processing device 2Areferences the operation plan OP and real-time operation status information OS, and generates an updated operation plan UOP in which the operation plan has been temporarily changed.
- the information processing device 2Areferences the operation plan OP and operation status information OS for a predetermined period (e.g., one month, six months, etc.), and generates a revised timetable as the updated operation plan UOP.
- a predetermined periode.g., one month, six months, etc.
- Examples of one or more vehicles that operate along a predetermined trackinclude, but are not limited to, trains, one-car steam trains, monorails, and route buses. In this disclosure, as an example, a case where one or more vehicles are trains will be described.
- the format of the operation plan OPis not limited, and as one example, it may be a visual timetable that lists the arrival and departure times of trains at each station. As another example, the format of the operation plan OP may be a digital timetable that each device references for control purposes.
- the operation management device 50performs operation control for at least one of the train's vehicles by referring to the operation plan.
- the operation management device 50performs operation control for at least one of the train's vehicles by referring to the updated operation plan UOP.
- the operation management device 50performs operation control for at least one of the train's vehicles by referring to operation control reference information, which is information contained in the updated operation plan UOP and is referenced to perform operation control for at least one of the train's vehicles.
- the operation management device 50performs operation control by controlling the signal 52 that controls the operation of the train by referring to the updated operation plan UOP.
- the operation management device 50may also output the updated operation plan UOP to the situation understanding support device 55.
- the rail sensor 54Coutputs data indicating which of the multiple rails on which the train runs is in contact with at least one of the train's cars to the situation understanding support device 55.
- the data output by the rail sensor 54C indicating which rail is in contact with at least one of the train's carsis position data for at least one of the train's cars.
- the situation understanding support device 55generates operation status information OS.
- the situation understanding support device 55generates operation status information OS by referring to at least one or more pieces of data output from the sensor 54.
- the situation understanding support device 55may also generate operation status information OS by further referring to the updated operation plan UOP output from the operation management device 50.
- the operation status information OSmay be information indicating the position of the train.
- the situation understanding support device 55generates information indicating the position of the train by referring to the data output from the rail sensor 54C.
- the operation status information OSmay be information indicating the amount of time that the operation plan is delayed.
- the situation understanding support device 55refers to the updated operation plan UOP and the data output from the rail sensor 54C, and generates information indicating the amount of time that the operation plan is delayed.
- the operation status information OSmay be information indicating the occupancy rate of at least some of the train's cars.
- the situation understanding support device 55generates information indicating the occupancy rate of at least some of the train's cars by referring to an image of the inside of the car output from the camera 54A.
- the situation understanding support device 55generates information indicating the occupancy rate of at least some of the train's cars by referring to weight data output from the weight scale 54B.
- the operation status information OSmay be information indicating the congestion status of the platform or ticket gates of each station.
- the situation understanding support device 55generates information indicating the congestion status of the platform or ticket gates of each station by referring to images of the station premises output from the camera 54A.
- the situation understanding support device 55generates operation status information OS by referring to at least one or more pieces of data output from the sensor 54, so it can optimally generate operation status information OS related to train operations.
- the situation understanding support device 55also generates information to be provided to external services. As an example, the situation understanding support device 55 generates the information to be provided by referring to at least one or more pieces of data output from the sensor 54 and at least one of the updated operation plans generated by the information processing device 2A. The situation understanding support device 55 outputs the generated information to be provided to at least one of the advertising planning device 56, the store planning device 57, the late-night bus operation planning device 58, and the accommodation demand forecasting device 59.
- the advertising planning device 56, the shop planning device 57, the late-night bus operation planning device 58, and the lodging demand forecasting device 59are devices that plan or forecast the provision of external services.
- the advertising planning device 56is a device that plans advertisements to be placed at stations or in the surrounding areas of stations.
- the shop planning device 57is a device that plans the display of goods at shops at stations or in the surrounding areas of stations.
- the late-night bus operation planning device 58is a device that plans the operation of buses that depart and arrive at stations or in the surrounding areas of stations late at night.
- the lodging demand forecasting device 59is a device that forecasts demand for lodging facilities in the surrounding areas of stations.
- the advertising planning device 56, the store planning device 57, the late-night bus operation planning device 58, and the lodging demand forecasting device 59each plan the provision of an external service by referring to the provision information output from the situation understanding support device 55. Examples of the processing executed by each of the advertising planning device 56, the store planning device 57, the late-night bus operation planning device 58, and the lodging demand forecasting device 59 will be described later.
- Fig. 5is a block diagram showing the configuration of the information processing device 2A.
- the information processing device 2Aincludes a control unit 20, a memory unit 30, a communication unit 31, and an input/output unit 32.
- the memory unit 30stores data referenced by the control unit 20.
- Examples of the memory unit 30include, but are not limited to, flash memory, a hard disk drive (HDD), a solid state drive (SSD), or a combination of these.
- Examples of data stored in the memory unit 30include, but are not limited to, the operation plan OP, operation status information OS, the updated operation plan UOP, constraint condition information CC, and the learned model LM.
- the operation plan OP, operation status information OS, and the updated operation plan UOPmay be stored in the memory unit 30 as learning data TD including the operation plan OP, operation status information OS, and the updated operation plan UOP.
- the learning data TDwill be described later.
- storing the learned model LM in the memory unit 30means that parameters defining the learned model LM are stored in the memory unit 30.
- the learned model LMmay be a learned model learned by reinforcement learning.
- a CNNConvolution Neural Network
- RNNRecurrent Neural Network
- a non-neural network type modelsuch as a random forest or a support vector machine may be used.
- the communication unit 31is an interface that transmits and receives data via a network.
- Examples of the communication unit 31include, but are not limited to, communication chips for various communication standards such as Ethernet (registered trademark), Wi-Fi (registered trademark), and wireless communication standards for mobile data communication networks, and USB-compliant connectors.
- the communication unit 31transmits data provided by the control unit 20 to other devices, and provides data received from other devices to the control unit 20.
- the input/output unit 32is an interface that accepts data input and outputs data. Examples of the input/output unit 32 include, but are not limited to, a keyboard, a mouse, a touchpad, a microphone, and an LCD display.
- the input/output unit 32When the input/output unit 32 receives data input, it supplies the received data to the control unit 10A. The input/output unit 32 also outputs the data supplied from the control unit 10A.
- the control unit 20controls each component included in the information processing device 2A. As shown in Fig. 5, the control unit 20 includes a first acquisition unit 11, a second acquisition unit 12, a first generation unit 13, an output unit 21, and a learning unit 22. In this exemplary embodiment, the first acquisition unit 11, the second acquisition unit 12, the first generation unit 13, and the learning unit 22 respectively realize a first acquisition means, a second acquisition means, a first generation means, and a learning means.
- the first acquisition unit 11acquires an operation plan OP for the train cars. As an example, the first acquisition unit 11 acquires the operation plan OP before updating via the input/output unit 32. The first acquisition unit 11 stores the acquired operation plan OP in the memory unit 30.
- the first acquisition unit 11also acquires constraint condition information CC indicating constraint conditions in formulating an operation plan.
- the first acquisition unit 11acquires the constraint condition information CC via the input/output unit 32.
- the constraint condition information CCis information on know-how (rules) for formulating an operation plan.
- the constraint condition information CCis information on conditions for amending a timetable.
- the constraint condition information CCis information on personnel related to trains (station staff, crew members, inspectors who inspect trains, etc.).
- the first acquisition unit 11also acquires learning data TD including the operation plan OP before the update, the operation status information OS, and the operation plan OP after the update.
- the first acquisition unit 11stores the acquired learning data TD in the storage unit 30.
- the learning data TDmay be generated by the first acquisition unit 11 acquiring the pre-update operation plan OP, the operation status information OS, and the updated operation plan OP separately, and then associating them.
- the learning data TDmay be generated by an operation from the user received via the input/output unit 32.
- the learning data TDmay be generated using a simulator.
- the learning data TDmay be generated by causing a disturbance (e.g., an accident, disaster, etc.) to train operation in the simulator.
- a disturbancee.g., an accident, disaster, etc.
- the trainis operated according to the operation plan before the update, and the first acquisition unit 11 acquires the operation plan before the update OP.
- a disturbanceis caused in the simulator, and the first acquisition unit 11 acquires the operation situation after the disturbance as the operation situation OS.
- the operation planis updated after the disturbance, and the first acquisition unit 11 acquires the updated operation plan OP.
- the second acquisition unit 12acquires operation status information OS related to the operation status of at least one of the train's cars. As an example, the second acquisition unit 12 acquires operation status information OS output from the situation understanding support device 55. The second acquisition unit 12 stores the acquired operation status information OS in the memory unit 30.
- the first generation unit 13refers to the operation plan OP and the operation status information OS, and generates an updated operation plan OP using the learned model LM.
- the first generation unit 13stores the updated operation plan OP in the storage unit 30.
- the first generating unit 13may also generate the updated operation plan OP by further referring to the constraint condition information CC stored in the storage unit 30.
- the output unit 21outputs data via the communication unit 31 or to the input/output unit 32.
- the output unit 21outputs the updated operation plan OP to at least one of the operation management device 50, the inspection planning device 51, and the crew terminal 53 via the communication unit 31.
- the output unit 21outputs the updated operation plan OP to the input/output unit 32, which is a liquid crystal display. In this case, the input/output unit 32 displays an image including the updated operation plan OP.
- the learning unit 22generates a learned model LM by optimization processing using machine learning with reference to the learning data TD.
- the learning data TDincludes the operation plan OP before the update, the operation status information OS, and the operation plan OP after the update. Therefore, by the learning unit 22 generating the learned model LM by optimization processing using machine learning with reference to the learning data TD, the information processing device 2A can generate an updated operation plan OP according to the operation status.
- the learning unit 22defines a cost function whose value decreases the more favorable the state and behavior (lower occupancy rate and fewer special trains), or a reward function whose value increases the more favorable the state and behavior, with the passenger occupancy rate being the state and increasing the number of special trains being the behavior.
- the learning unit 22then generates a learned model LM that minimizes the cost function or maximizes the reward function.
- the learning unit 22inputs the pre-update operation plan OP and operation status information OS to the learned model LM, and trains the learned model LM so that the updated operation plan OP that minimizes the cost function or maximizes the reward function is output.
- favorable conditionsinclude, but are not limited to, fewer station staff, fewer people on the station platform, and fewer people queuing at ticket gates.
- favorable behaviorinclude, but are not limited to, fewer additional station staff, less work for train crew, and fewer trains leaving or entering the depot.
- the first generation unit 13may generate the updated operation plan OP by further referring to the constraint condition information CC.
- the learning unit 22further trains the learned model LM so that an updated operation plan OP in which the cost function is minimized or the reward function is maximized and which satisfies the constraint condition information CC is output.
- the information processing device 2Acan generate an updated operation plan OP according to the constraint conditions in addition to the operation status.
- Fig. 6is a diagram showing an example of the updated operation plan UOP.
- the first generation unit 13generates an updated operation plan UOP that includes operation control reference information referenced by the operation management device 50 to perform operation control for at least one of the train's cars.
- the operation control reference informationincludes information on a changed timetable (changes to arrival and departure times, changes to stop times, etc.).
- the operation control reference informationincludes information indicating that a certain train will turn back at a certain station.
- the operation control reference informationincludes information indicating the time that a certain train will depart or enter the depot.
- the input/output unit 32displays image PIC1 shown in the upper part of FIG. 6 as an example.
- Image PIC1shows that train number "A123” arrives at a certain station at "6:00” and departs at "6:02".
- Image PIC1also shows that train number "B456” arrives at a certain station at "6:30" and departs at "6:32".
- the first generation unit 13generates an updated operation plan UOP that includes operation control reference information. Therefore, the information processing device 2A can cause the operation management device 50 to operate trains based on the updated operation plan UOP.
- the operation management device 50controls operations by referring to the updated operation plan UOP, and can operate trains based on the updated operation plan UOP generated by the information processing device 2A according to the operating conditions.
- Example 2 of the updated operation plan UOPAnother example of the updated operation plan UOP generated by the first generating unit 13 will be described with reference to FIG. 6 again.
- the first generation unit 13generates notification information for notifying train crew members.
- the notification informationincludes information on the changed timetable (changes to arrival and departure times, changes to stop times, etc.). As another example, the notification information includes information indicating the section where train operation is disrupted. As yet another example, the notification information includes information indicating the station where the train carrying the crew member will turn around. As yet another example, the notification information includes information indicating the time the train carrying the crew member will depart or enter the depot.
- the input/output unit 32displays, as an example, image PIC2 shown in the center of FIG. 6.
- Image PIC2shows that a disruption has occurred in train operation between "Station A” and “Station B”.
- Image PIC2also shows that the train with the crew on board will turn around at "Station C”.
- the first generation unit 13generates an updated operation plan UOP that includes notification information. Therefore, when a train operation plan is changed, the information processing device 2A can notify the train crew of the changed operation plan in real time and notify them of the operation status.
- Example 3 of the updated operation plan UOPStill another example of the updated operation plan UOP generated by the first generating unit 13 will be described with reference to FIG. 6 again.
- the first generation unit 13generates inspection plan information regarding an inspection plan for at least one of the train's vehicles.
- the inspection plan informationincludes information indicating the running time of a certain train in a given period of time.
- the inspection plan informationincludes information indicating the running distance of a certain train in a given period of time.
- the input/output unit 32displays PIC3 shown in the lower part of FIG. 6 as an example.
- Image PIC3shows that the running time of train number "A123" since November 1st is “10 hours” and the running distance is "300 km”.
- Image PIC3also shows that the running time of train number "B456" since November 1st is “15 hours” and the running distance is "400 km”.
- the first generation unit 13generates an updated operation plan UOP that includes the inspection plan information. Therefore, the information processing device 2A can cause the inspection planning device 51 to plan when and what kind of inspection should be performed on the train.
- Fig. 7is a flow diagram showing the flow of processes executed in the information processing system 1A.
- Step S21the first acquisition unit 11 of the information processing device 2A acquires an operation plan OP.
- the first acquisition unit 11stores the acquired operation plan OP in the storage unit 30.
- step S22the situation understanding support device 55 generates the operation status information OS.
- the situation understanding support device 55may generate the operation status information OS by referring to at least one of the one or a plurality of data output from the sensor 54.
- step S23the situation grasping assistance device 55 outputs the operation status information OS generated in step S22 to the information processing device 2A.
- Step S24the second acquisition unit 12 of the information processing device 2A acquires the operation status information OS output in step S23.
- the second acquisition unit 12stores the acquired operation status information OS in the storage unit 30.
- Step S25the first generation unit 13 refers to the operation plan OP acquired in step S21 and the operation status information OS acquired in step S24, and generates an updated operation plan UOP by using the learned model LM.
- the first generation unit 13stores the generated updated operation plan UOP in the storage unit 30.
- Step S26the output unit 21 outputs the updated operation plan UOP generated in step S25 to the operation management device 50. Note that in step S26, the output unit 21 may further output the updated operation plan UOP to at least one of the input/output unit 32, the inspection planning device 51, and the crew terminal 53.
- step S27the operation management device 50 acquires the updated operation plan UOP output in step S26.
- Step S28the traffic management device 50 performs traffic control for trains by referring to the updated operation plan UOP.
- Step S29the situation grasping support device 55 generates operation status information OS.
- the operation status information OS generated by the situation grasping support device 55 in step S29is operation status information OS related to the operation status of the train whose operation is controlled by referring to the updated operation plan UOP generated in step S25.
- Step S30the situation grasping assistance device 55 outputs the operation status information OS generated in step S29 to the information processing device 2A.
- Step S31the second acquisition unit 12 of the information processing device 2A acquires the operation status information OS output in step S30. That is, the second acquisition unit 12 acquires operation status information OS related to the operation status of the train whose operation is controlled by the operation management device 50 with reference to the updated operation plan UOP. The second acquisition unit 12 stores the acquired operation status information OS in the storage unit 30.
- step S31the information processing device 2A executes the process of step S25 again. That is, in step S25, the first generation unit 13 generates a re-updated operation plan UOP by at least referring to the operation status information OS acquired in step S31.
- a re-updated operation plan UOPis generated using the learned model LM by referring to the updated operation plan UOP generated in step S25 for the nth time and operation status information OS related to the operation status of the train whose operation is controlled by referring to the updated operation plan UOP and which is acquired in step S31 for the nth time.
- the information processing device 2Arefers to the updated operation plan UOP and the operation status information OS related to the operation status of the train whose operation is controlled by referring to the updated operation plan UOP, and generates a re-updated operation plan UOP.
- the information processing device 2Athen repeatedly executes this process. In other words, since the information processing device 2A performs feedback control, it is possible to reduce the impact of temporary changes in the operation status and generate a stable and appropriate updated operation plan UOP.
- the situation grasping support device 55may generate information to be provided in addition to or instead of generating the operation status information. As described above, the situation grasping support device 55 may generate the information to be provided by referring to at least one or a plurality of pieces of data output from the sensor 54 and at least one of the updated operation plan generated by the information processing device 2A. This configuration will be described with reference to Fig. 8.
- Fig. 8is a diagram showing an example of the information to be provided.
- the situation understanding support device 55generates information to be provided that includes advertising service information referenced in the advertising service.
- the situation understanding support device 55references an image of the interior of a train output from a camera 54A installed on a train that is scheduled to arrive at a certain station. If the image contains many high school students as subjects, the situation understanding support device 55 generates information to be provided SPI that includes advertising service information indicating that there are many high school students on board the train that is scheduled to arrive, as shown in FIG. 9.
- the situation understanding support device 55outputs the generated information to be provided to the advertising planning device 56.
- the advertising planning device 56refers to the advertising service information included in the information to be provided, and plans to display an advertisement for high school students on a digital signage terminal installed at a certain station.
- the situation understanding support device 55can display suitable advertisements at or around stations by generating information to be provided that includes information for advertising services.
- the situation understanding support device 55generates information to be provided that includes retail service information that is referenced in retail services.
- the situation understanding support device 55references images of the inside of a station at a certain station from 6:00 p.m. to 7:00 p.m. output from the camera 54A during a specified period. Then, if the images include many people wearing suits as subjects, the situation understanding support device 55 generates information to be provided SPI2 that includes retail service information that indicates that there are many people wearing suits in the station between 6:00 p.m. and 7:00 p.m., as shown in FIG. 9.
- the situation understanding support device 55outputs the generated information to be provided to the store planning device 57.
- the store planning device 57refers to the retail service information included in the information to be provided and plans to display products for office workers on shelves at a store in or near a certain station between 6:00 p.m. and 7:00 p.m.
- the situation understanding support device 55can generate provision information including retail service information, allowing suitable products to be displayed at kiosks within or around the station.
- the situation understanding support device 55generates information to be provided that includes transportation service information that is referenced in other transportation services.
- the situation understanding support device 55references weight data output from the last train at a certain station. Then, if the weight data is equal to or greater than a predetermined value, the situation understanding support device 55 generates information to be provided SPI3 that includes transportation service information that indicates that there are many passengers on the last train, as shown in FIG. 9.
- the situation understanding support device 55outputs the generated information to be provided to the late-night bus operation planning device 58.
- the late-night bus operation planning device 58refers to the transportation service information included in the information to be provided and plans to increase the number of late-night buses departing from a certain station.
- the situation understanding support device 55can generate information to be provided that includes information for transport services, thereby enabling transport services departing and arriving at stations or in the areas surrounding stations to be operated optimally.
- the situation understanding support device 55generates information to be provided that includes information for accommodation services that is referenced in the accommodation service.
- the situation understanding support device 55references an image of the area around a certain station output from the camera 54A. If the image contains as a subject an advertisement indicating that an event will be held in the vicinity of a certain station, the situation understanding support device 55 generates information to be provided SPI4 that includes information for accommodation services that indicates that an event will be held in the vicinity of a certain station, as shown in FIG. 8.
- the situation understanding support device 55outputs the generated information to be provided to the accommodation demand prediction device 59.
- the accommodation demand prediction device 59refers to the information for accommodation services included in the information to be provided and predicts that there will be an increase in demand for accommodation facilities around a certain station.
- the situation understanding support device 55can generate provision information that includes information about accommodation services, thereby making it possible to appropriately predict the demand for accommodation facilities in the vicinity of the station.
- the information processing system 1Arefers to the train operation plan and the train operation status, and generates an updated operation plan using the trained model. Therefore, the information processing system 1A updates the operation plan using the trained model, so that the operation plan can be appropriately updated in a non-personal manner. Furthermore, the information processing system 1A can quickly update the operation plan in response to changes in the operation status.
- Some or all of the functions of the information processing systems 1, 1A and information processing devices 2, 2Amay be realized by hardware such as an integrated circuit (IC chip), or by software.
- each of the above systems and devicesis realized, for example, by a computer that executes instructions of a program, which is software that realizes each function.
- a computerthat executes instructions of a program, which is software that realizes each function.
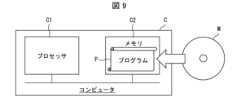
- An example of such a computer(hereinafter referred to as computer C) is shown in Figure 9.
- Figure 9is a block diagram showing the hardware configuration of computer C that functions as each of the above systems and devices.
- Computer Chas at least one processor C1 and at least one memory C2.
- Memory C2stores a program P for operating computer C as each of the above systems and devices.
- processor C1reads and executes program P from memory C2, thereby realizing the functions of each of the above systems and devices.
- the processor C1may be, for example, a CPU (Central Processing Unit), GPU (Graphic Processing Unit), DSP (Digital Signal Processor), MPU (Micro Processing Unit), FPU (Floating point number Processing Unit), PPU (Physics Processing Unit), TPU (Tensor Processing Unit), quantum processor, microcontroller, or a combination of these.
- the memory C2may be, for example, a flash memory, HDD (Hard Disk Drive), SSD (Solid State Drive), or a combination of these.
- Computer Cmay further include a RAM (Random Access Memory) for expanding program P during execution and for temporarily storing various data.
- Computer Cmay further include a communications interface for sending and receiving data to and from other devices.
- Computer Cmay further include an input/output interface for connecting input/output devices such as a keyboard, mouse, display, and printer.
- the program Pcan also be recorded on a non-transitory, tangible recording medium M that can be read by the computer C.
- a recording medium Mcan be, for example, a tape, a disk, a card, a semiconductor memory, or a programmable logic circuit.
- the computer Ccan obtain the program P via such a recording medium M.
- the program Pcan also be transmitted via a transmission medium.
- a transmission mediumcan be, for example, a communications network or broadcast waves.
- the computer Ccan also obtain the program P via such a transmission medium.
- An information processing systemcomprising: a first generation means that refers to the operation plan and the operation status information and generates an updated operation plan using a trained model.
- appendix A2The information processing system according to appendix A1, further comprising an operation control means for performing operation control for at least one of the one or more vehicles by referring to the updated operation plan.
- the updated operation plan generated by the first generation meansincludes: Operation control reference information referenced by the operation control means in order to perform operation control for at least one of the one or more vehicles;
- the information processing system according to appendix A2comprising at least one of notification information for notifying at least any crew member of the one or more vehicles, and inspection plan information regarding an inspection plan of at least any of the one or more vehicles.
- the second acquisition meansfurther acquires operation status information related to an operation status of at least one of the one or more vehicles whose operation is controlled by the operation control means with reference to the updated operation plan,
- the first acquisition meansfurther acquires constraint condition information indicating constraint conditions in planning the operation plan,
- the information processing systemaccording to any one of appendices A1 to A4, wherein the first generation means generates the updated operation plan by further referring to the constraint condition information.
- Appendix A6First imaging data captured by at least one vehicle-mounted camera of the one or more vehicles; Weight data of at least one of the one or more vehicles;
- the information processing systemaccording to any one of Appendices A1 to A5, further comprising a second generating means for generating the operation status information by referring to at least any of second image data at a station where at least any of the one or more vehicles stop, and at least any of position data of at least any of the one or more vehicles.
- Appendix A7Information to be provided to external services, The information processing system according to Appendix A6, further comprising: a third generation means that generates the updated operation plan by referring to at least any of the first imaging data, the weight data, the second imaging data, and the position data that are referred to by the second generation means, and the updated operation plan generated by the first generation means.
- the information to be providedincludes: Information for advertising services referenced in advertising services; Information for retail services referenced in retail services; The information processing system according to appendix A7, comprising at least one of: information for a transportation service referenced in another transportation service; and information for an accommodation service referenced in an accommodation service.
- the first acquisition meansincludes: Further acquiring learning data including the operation plan before the update, operation status information, and the operation plan after the update;
- the information processing systemincludes: The information processing system according to any one of appendices A1 to A8, further comprising a learning means for generating the trained model by an optimization process using machine learning with reference to the learning data.
- Appendix B1A first acquisition process in which at least one processor acquires a trip plan for one or more vehicles that are operated along a predetermined trajectory; A second acquisition process in which the at least one processor acquires operation status information related to at least any operation status of the one or more vehicles; An information processing method including a first generation process in which the at least one processor refers to the operation plan and the operation status information and generates an updated operation plan using a learned model.
- Appendix B2The information processing method according to appendix B1, further comprising a process of controlling operation of the at least one processor by referring to the updated operation plan and controlling operation of at least one of the one or more vehicles.
- Appendix B4The at least one processor In the second acquisition process, operation status information related to at least any operation status of the one or more vehicles whose operation is controlled in the operation control process with reference to the updated operation plan is further acquired; The information processing method according to claim 2 or 3, wherein in the first generation process, a re-updated operation plan is generated by at least referring to the operation status information.
- Appendix B7The at least one processor generates provision information to be provided to an external service,
- the information to be providedincludes: Information for advertising services referenced in advertising services; Information for retail services referenced in retail services; The information processing method according to appendix B7, comprising at least one of information for a transportation service referred to in another transportation service, and information for an accommodation service referred to in an accommodation service.
- the at least one processorfurther acquires learning data including an operation plan before the update, operation status information, and an operation plan after the update;
- Appendix C1A program for causing a computer to function as an information processing device, The computer, A first acquisition means for acquiring an operation plan for one or more vehicles that are operated along a predetermined trajectory; A second acquisition means for acquiring operation status information related to at least any operation status of the one or more vehicles; A program that functions as a first generation means that refers to the operation plan and the operation status information and generates an updated operation plan using a learned model.
- the updated operation plan generated by the first generation meansincludes: Operation control reference information referenced by the operation control means in order to perform operation control for at least one of the one or more vehicles;
- the program described in Appendix C2which includes at least one of notification information for notifying at least any crew member of the one or more vehicles, and inspection plan information regarding an inspection plan of at least any of the one or more vehicles.
- the second acquisition meansfurther acquires operation status information related to an operation status of at least one of the one or more vehicles whose operation is controlled by the operation control means with reference to the updated operation plan,
- the first acquisition meansfurther acquires constraint condition information indicating constraint conditions in planning the operation plan,
- the programaccording to any one of appendices C1 to C4, wherein the first generation means generates the updated operation plan by further referring to the constraint condition information.
- Appendix C6The computer, First imaging data captured by at least one vehicle-mounted camera of the one or more vehicles; Weight data of at least one of the one or more vehicles;
- the program described in any one of appendices C1 to C5functions as a second generation means for generating the operation status information by referring to at least one of second image data at a station where at least one of the one or more vehicles stops, and at least one of position data of at least one of the one or more vehicles.
- Appendix C7The computer, Information to be provided to external services,
- the program described in Appendix C6causes the program to function as a third generation means that generates the operation plan by referring to at least any of the first imaging data, the weight data, the second imaging data, and the position data referenced by the second generation means, and the updated operation plan generated by the first generation means.
- Appendix C8The information to be provided includes: Information for advertising services referenced in advertising services; Information for retail services referenced in retail services; The program described in Appendix C7, which includes at least one of information for transportation services referenced in other transportation services, and information for accommodation services referenced in accommodation services.
- the first acquisition meansincludes: Further acquiring learning data including the operation plan before the update, operation status information, and the operation plan after the update;
- the computerThe program according to any one of appendices C1 to C8, further functioning as a learning means for generating the trained model by an optimization process using machine learning with reference to the training data.
- At least one processorcomprising: A first acquisition process for acquiring an operation plan for one or more vehicles that are operated along a predetermined trajectory; A second acquisition process of acquiring operation status information related to at least any operation status of the one or more vehicles; An information processing system that executes a first generation process that refers to the operation plan and the operation status information and generates an updated operation plan using a learned model.
- Appendix D2The at least one processor The information processing system according to appendix D1, which executes a driving control process for controlling driving of at least one of the one or more vehicles by referring to the updated driving plan.
- the updated operation plan generated in the first generation processincludes: Operation control reference information that is referenced in the operation control process to perform operation control for at least one of the one or more vehicles;
- the information processing system according to appendix D2which includes at least one of notification information for notifying at least any crew member of the one or more vehicles, and inspection plan information regarding an inspection plan of at least any of the one or more vehicles.
- Appendix D6The at least one processor First imaging data captured by at least one vehicle-mounted camera of the one or more vehicles; Weight data of at least one of the one or more vehicles; The information processing system according to any one of appendices D1 to D5, which executes a second generation process to generate the operation status information by referring to at least any of second imaging data at a station where at least any of the one or more vehicles stop, and at least any of position data of at least any of the one or more vehicles.
- Appendix D7The at least one processor Information to be provided to external services,
- the information processing system described in Appendix D6executes a third generation process by referring to at least any of the first imaging data, the weight data, the second imaging data, and the position data referenced in the second generation process, and the updated operation plan generated in the first generation process.
- the information to be providedincludes: Information for advertising services referenced in advertising services; Information for retail services referenced in retail services; An information processing system according to appendix D7, comprising at least one of information for transportation services referenced in other transportation services, and information for accommodation services referenced in accommodation services.
- the at least one processorfurther acquires learning data including an operation plan before the update, operation status information, and an operation plan after the update in the first acquisition process;
- (Appendix E1)A program for causing a computer to function as an information processing device, The computer includes: A first acquisition process for acquiring an operation plan for one or more vehicles that are operated along a predetermined trajectory; A second acquisition process of acquiring operation status information related to at least any operation status of the one or more vehicles; A non-temporary recording medium having recorded thereon a program for executing a first generation process that refers to the operation plan and the operation status information and generates an updated operation plan using a learned model.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Train Traffic Observation, Control, And Security (AREA)
Abstract
Description
Translated fromJapanese本開示は、情報処理システム、情報処理装置、情報処理方法、及びプログラムに関する。This disclosure relates to an information processing system, an information processing device, an information processing method, and a program.
例えば鉄道のように、予め定められた運行計画に基づいて車両を運行させるシステムにおいて、状況に応じて運行計画を更新する技術が知られている。For example, in systems such as railways where vehicles are operated based on a predetermined operation plan, there is known technology for updating the operation plan depending on the situation.
例えば、特許文献1には、運転指令員が運行指令を入力するための運行指令コンソールを有する鉄道運行管理システムが開示されている。当該鉄道運行管理システムでは、運転指令員が、列車の遅れ時分、駅の混雑度、利用者の移行、及び事故や故障の現場状況を総合的に判断し、列車ダイヤを変更する。For example, Patent Document 1 discloses a railway traffic control system that has a traffic command console that allows a train dispatcher to input traffic commands. In this railway traffic control system, the train dispatcher makes a comprehensive judgment on the train delay time, the congestion level at the station, the shift in users, and the on-site situation of accidents and breakdowns, and then changes the train schedule.
しかしながら、特許文献1に記載の鉄道運行管理システムでは、運転指令員の判断に基づいて列車ダイヤ(運行計画)が変更されるため、属人的な要素が強い。そのため、運転指令員によっては、適切に列車ダイヤを更新できない可能性があるという問題がある。However, in the railway traffic control system described in Patent Document 1, changes to the train schedule (operation plan) are made based on the judgment of the operation dispatcher, which means that there is a strong personal element to the system. As a result, there is a problem that, depending on the operation dispatcher, the train schedule may not be updated appropriately.
本開示は、上記の問題に鑑みてなされたものであり、その一例示的目的は、非属人的に、運行計画を適切に更新する技術を提供することにある。This disclosure has been made in consideration of the above problems, and one exemplary objective thereof is to provide a technology for appropriately updating operation plans in a non-personal manner.
本開示の一例示的側面に係る情報処理システムは、予め定められた軌道に沿って運行される1又は複数の車両に関する運行計画を取得する第1の取得手段と、前記1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を取得する第2の取得手段と、前記運行計画と前記運行状況情報とを参照し、学習済モデルを用いて更新後の運行計画を生成する第1の生成手段とを備えている。An information processing system according to an exemplary aspect of the present disclosure includes a first acquisition means for acquiring an operation plan for one or more vehicles operating along a predetermined trajectory, a second acquisition means for acquiring operation status information related to at least any operation status of the one or more vehicles, and a first generation means for generating an updated operation plan by referring to the operation plan and the operation status information and using a trained model.
本開示の一例示的側面に係る情報処理装置は、予め定められた軌道に沿って運行される1又は複数の車両に関する運行計画を取得する第1の取得手段と、前記1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を取得する第2の取得手段と、前記運行計画と前記運行状況情報とを参照し、学習済モデルを用いて更新後の運行計画を生成する第1の生成手段とを備えている。An information processing device according to an exemplary aspect of the present disclosure includes a first acquisition means for acquiring an operation plan for one or more vehicles operating along a predetermined trajectory, a second acquisition means for acquiring operation status information related to at least any operation status of the one or more vehicles, and a first generation means for generating an updated operation plan by referring to the operation plan and the operation status information and using a trained model.
本開示の一例示的側面に係る情報処理方法は、少なくとも1つのプロセッサが、予め定められた軌道に沿って運行される1又は複数の車両に関する運行計画を取得する第1の取得処理と、前記少なくとも1つのプロセッサが、前記1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を取得する第2の取得処理と、前記少なくとも1つのプロセッサが、前記運行計画と前記運行状況情報とを参照し、学習済モデルを用いて更新後の運行計画を生成する第1の生成処理とを含んでいる。An information processing method according to an exemplary aspect of the present disclosure includes a first acquisition process in which at least one processor acquires an operation plan for one or more vehicles operating along a predetermined trajectory, a second acquisition process in which the at least one processor acquires operation status information related to at least any operation status of the one or more vehicles, and a first generation process in which the at least one processor references the operation plan and the operation status information and generates an updated operation plan using a trained model.
本開示の一例示的側面に係るプログラムは、情報処理装置としてコンピュータを機能させるプログラムであって、前記コンピュータを、予め定められた軌道に沿って運行される1又は複数の車両に関する運行計画を取得する第1の取得手段と、前記1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を取得する第2の取得手段と、前記運行計画と前記運行状況情報とを参照し、学習済モデルを用いて更新後の運行計画を生成する第1の生成手段と、として機能させるA program according to an exemplary aspect of the present disclosure is a program that causes a computer to function as an information processing device, and causes the computer to function as a first acquisition means that acquires an operation plan for one or more vehicles that are operated along a predetermined trajectory, a second acquisition means that acquires operation status information related to at least one of the operation statuses of the one or more vehicles, and a first generation means that references the operation plan and the operation status information and generates an updated operation plan using a trained model.
本開示の一例示的側面によれば、非属人的に、運行計画を適切に更新する技術を提供することができるという一例示的効果を奏する。An exemplary aspect of the present disclosure provides an exemplary effect of providing technology that appropriately updates operation plans in a non-personal manner.
以下、本発明の実施形態を例示する。ただし、本発明は、以下に示す各例示的実施形態に限定されるものではなく、請求項に示した範囲で種々の変更が可能である。例えば、以下に示す各例示的実施形態において採用される技術的手段を適宜組み合わせることにより得られる実施形態についても、本発明の範疇に含まれ得る。また、以下に示す各例示的実施形態において採用される技術的手段の一部を適宜省略することにより得られる実施形態についても、本発明の範疇に含まれ得る。また、以下に示す各例示的実施形態において言及する効果は、その例示的実施形態において期待される効果の一例であり、本発明の外延を規定するものではない。すなわち、以下に示す各例示的実施形態において言及する効果を奏さない実施形態についても、本発明の範疇に含まれ得る。Below are examples of embodiments of the present invention. However, the present invention is not limited to the exemplary embodiments shown below, and various modifications are possible within the scope of the claims. For example, embodiments obtained by appropriately combining the technical means employed in the exemplary embodiments shown below may also be included in the scope of the present invention. Furthermore, embodiments obtained by appropriately omitting some of the technical means employed in the exemplary embodiments shown below may also be included in the scope of the present invention. Furthermore, the effects mentioned in the exemplary embodiments shown below are examples of effects expected in the exemplary embodiments, and do not define the scope of the present invention. In other words, embodiments that do not exhibit the effects mentioned in the exemplary embodiments shown below may also be included in the scope of the present invention.
〔第1の例示的実施形態〕
本発明の実施形態の一例である第1の例示的実施形態について、図面を参照して詳細に説明する。本例示的実施形態は、後述する各例示的実施形態の基本となる形態である。なお、本例示的実施形態において採用する各技術的手段の適用範囲は、本例示的実施形態に限定されない。すなわち、本例示的実施形態において採用する各技術的手段は、特段の技術的支障が生じない範囲で、本開示に含まれる他の例示的実施形態においても採用可能である。また、本例示的実施形態を説明するために参照する図面に示される各技術的手段も、特段の技術的支障が生じない範囲で、本開示に含まれる他の例示的実施形態においても採用可能である。First Exemplary Embodiment
A first exemplary embodiment, which is an example of an embodiment of the present invention, will be described in detail with reference to the drawings. This exemplary embodiment is the basic form of each exemplary embodiment described later. The scope of application of each technical means adopted in this exemplary embodiment is not limited to this exemplary embodiment. That is, each technical means adopted in this exemplary embodiment can be adopted in other exemplary embodiments included in this disclosure to the extent that no particular technical obstacle occurs. In addition, each technical means shown in the drawings referred to for explaining this exemplary embodiment can also be adopted in other exemplary embodiments included in this disclosure to the extent that no particular technical obstacle occurs.
(情報処理システム1の構成)
情報処理システム1の構成について、図1を参照して説明する。図1は、情報処理システム1の構成を示すブロック図である。情報処理システム1は、図1に示すように、第1の取得部11、第2の取得部12、及び第1の生成部13を備えている。第1の取得部11、第2の取得部12、及び第1の生成部13は、それぞれ本例示的実施形態において、第1の取得手段、第2の取得手段、及び第1の生成手段を実現する。(Configuration of Information Processing System 1)
The configuration of the information processing system 1 will be described with reference to Fig. 1. Fig. 1 is a block diagram showing the configuration of the information processing system 1. As shown in Fig. 1, the information processing system 1 includes a
図1に示すように、第1の取得部11、第2の取得部12、及び第1の生成部13を備えている。また、図1に示すように、第1の取得部11、第2の取得部12、及び第1の生成部13は、それぞれネットワークNを介して通信可能に接続されている。ネットワークNの具体的構成は本例示的実施形態を限定するものではないが、一例として、無線LAN(Local Area Network)、又は有線LANが挙げられる。他の例として、WAN(Wide Area Network)、公衆回線網、モバイルデータ通信網、又はこれらのネットワークの組み合わせを用いることができる。As shown in FIG. 1, the system includes a
第1の取得部11は、予め定められた軌道に沿って運行される1又は複数の車両に関する運行計画を取得する。第1の取得部11は、取得した運行計画を第1の生成部13に供給する。The
第2の取得部12は、1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を取得する。第2の取得部12は、取得した運行状況情報を第1の生成部13に供給する。The
第1の生成部13は、第1の取得部11が取得した運行計画と第2の取得部12が取得した運行状況情報とを参照し、学習済モデルを用いて更新後の運行計画を生成する。The
(情報処理システム1の効果)
以上のように、情報処理システム1においては、予め定められた軌道に沿って運行される1又は複数の車両に関する運行計画を取得する第1の取得部11と、1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を取得する第2の取得部12と、第1の取得部11が取得した運行計画と第2の取得部12が取得した運行状況情報とを参照し、学習済モデルを用いて更新後の運行計画を生成する第1の生成部13と、を備える構成が採用されている。このため、情報処理システム1によれば、非属人的に、運行計画を適切に更新することができるという効果が得られる。(Effects of Information Processing System 1)
As described above, the information processing system 1 is configured to include a
(情報処理装置2の構成)
情報処理装置2の構成について、図2を参照して説明する。図2は、情報処理装置2の構成を示すブロック図である。情報処理装置2は、図2に示すように、第1の取得部11、第2の取得部12、及び第1の生成部13を備えている。第1の取得部11、第2の取得部12、及び第1の生成部13は、それぞれ本例示的実施形態において、第1の取得手段、第2の取得手段、及び第1の生成手段を実現する。(Configuration of information processing device 2)
The configuration of the
第1の取得部11は、予め定められた軌道に沿って運行される1又は複数の車両に関する運行計画を取得する。第1の取得部11は、取得した運行計画を第1の生成部13に供給する。The
第2の取得部12は、1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を取得する。第2の取得部12は、取得した運行状況情報を第1の生成部13に供給する。The
第1の生成部13は、第1の取得部11が取得した運行計画と第2の取得部12が取得した運行状況情報とを参照し、学習済モデルを用いて更新後の運行計画を生成する。The
(情報処理装置2の効果)
以上のように、情報処理装置2においては、予め定められた軌道に沿って運行される1又は複数の車両に関する運行計画を取得する第1の取得部11と、1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を取得する第2の取得部12と、第1の取得部11が取得した運行計画と第2の取得部12が取得した運行状況情報とを参照し、学習済モデルを用いて更新後の運行計画を生成する第1の生成部13と、を備える構成が採用されている。このため、情報処理装置2によれば、上述した情報処理システム1と同様の効果が得られる。(Effects of information processing device 2)
As described above, the
(情報処理方法S1の流れ)
情報処理方法S1の流れについて、図3を参照して説明する。図3は、情報処理方法S1の流れを示すフロー図である。情報処理方法S1は、図3に示すように、第1の取得処理S11、第2の取得処理S12、及び第1の生成処理S13と、を含んでいる。(Flow of information processing method S1)
The flow of the information processing method S1 will be described with reference to Fig. 3. Fig. 3 is a flow diagram showing the flow of the information processing method S1. As shown in Fig. 3, the information processing method S1 includes a first acquisition process S11, a second acquisition process S12, and a first generation process S13.
(第1の取得処理S11)
第1の取得処理S11において、第1の取得部11は、予め定められた軌道に沿って運行される1又は複数の車両に関する運行計画を取得する。第1の取得部11は、取得した運行計画を第1の生成部13に供給する。(First acquisition process S11)
In a first acquisition process S11, the
(第2の取得処理S12)
第2の取得処理S12において、第2の取得部12は、1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を取得する。第2の取得部12は、取得した運行状況情報を第1の生成部13に供給する。(Second acquisition process S12)
In the second acquisition process S12, the
(第1の生成処理S13)
第1の生成処理S13において、第1の生成部13は、第1の取得部11が取得した運行計画と第2の取得部12が取得した運行状況情報とを参照し、学習済モデルを用いて更新後の運行計画を生成する。(First generation process S13)
In the first generation process S13, the
(情報処理方法S1の効果)
以上のように、情報処理方法S1においては、第1の取得部11が、予め定められた軌道に沿って運行される1又は複数の車両に関する運行計画を取得する第1の取得処理S11と、第2の取得部12が、1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を取得する第2の取得処理S12と、第1の生成部13は、第1の取得部11が取得した運行計画と第2の取得部12が取得した運行状況情報とを参照し、学習済モデルを用いて更新後の運行計画を生成する第1の生成処理S13と、を含む構成が採用されている。このため、情報処理方法S1によれば、上述した情報処理システム1と同様の効果が得られる。(Effects of information processing method S1)
As described above, the information processing method S1 employs a configuration including a first acquisition process S11 in which the
〔第2の例示的実施形態〕
本発明の実施形態の一例である第2の例示的実施形態について、図面を参照して詳細に説明する。上述した例示的実施形態にて説明した構成要素と同じ機能を有する構成要素については、同じ符号を付し、その説明を適宜省略する。なお、本例示的実施形態において採用する各技術的手段の適用範囲は、本例示的実施形態に限定されない。すなわち、本例示的実施形態において採用する各技術的手段は、特段の技術的支障が生じない範囲で、本開示に含まれる他の例示的実施形態においても採用可能である。また、本例示的実施形態を説明するために参照する各図面に示される各技術的手段は、特段の技術的支障が生じない範囲で、本開示に含まれる他の例示的実施形態においても採用可能である。Second Exemplary Embodiment
A second exemplary embodiment, which is an example of an embodiment of the present invention, will be described in detail with reference to the drawings. Components having the same functions as those described in the above exemplary embodiment will be given the same reference numerals, and their description will be omitted as appropriate. The scope of application of each technical means adopted in this exemplary embodiment is not limited to this exemplary embodiment. That is, each technical means adopted in this exemplary embodiment can be adopted in other exemplary embodiments included in this disclosure, as long as no particular technical hindrance occurs. In addition, each technical means shown in each drawing referred to for explaining this exemplary embodiment can be adopted in other exemplary embodiments included in this disclosure, as long as no particular technical hindrance occurs.
(情報処理システム1Aの構成)
情報処理システム1Aの構成について、図4を参照して説明する。図4は、情報処理システム1Aの構成を示すブロック図である。(Configuration of
The configuration of the
図4に示すように、情報処理システム1Aは、情報処理装置2A、運行管理装置50、検査計画装置51、信号52、乗務員用端末53、センサ54、状況把握支援装置55、広告計画装置56、売店計画装置57、深夜バス運行計画装置58、及び宿泊需要予測装置59を備えている。運行管理装置50は、本例示的実施形態において、運行制御手段を実現する。状況把握支援装置55は、本例示的実施形態において、第2の生成手段及び第3の生成手段を実現する。As shown in FIG. 4, the
情報処理装置2Aは、予め定められた軌道に沿って運行される1又は複数の車両に関する運行計画OPと、1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報OSとを参照し、更新後の運行計画UOPを生成する。一例として、情報処理装置2Aは、運行計画OPとリアルタイムの運行状況情報OSを参照して、一時的に運行計画を変更した更新後の運行計画UOPを生成する。他の例として、情報処理装置2Aは、運行計画OPと所定期間(例えば、1カ月、半年など)の運行状況情報OSを参照して改正したダイヤを、更新後の運行計画UOPとして生成する。更新後の運行計画UOPの例について、後述する。The
予め定められた軌道に沿って運行される1又は複数の車両の例として、列車、一両で構成された汽車、モノレール、及び路線バスが挙げられるが、これらに限定されない。本開示では一例として、1又は複数の車両が列車の場合を例に挙げて説明する。Examples of one or more vehicles that operate along a predetermined track include, but are not limited to, trains, one-car steam trains, monorails, and route buses. In this disclosure, as an example, a case where one or more vehicles are trains will be described.
また、運行計画OPの形式は限定されず、一例として、各駅における列車の到着時刻及び発車時刻が記載された視認用のダイヤであってもよい。他の例として、運行計画OPの形式は、各装置が制御のために参照するデジタルダイヤであってもよい。Furthermore, the format of the operation plan OP is not limited, and as one example, it may be a visual timetable that lists the arrival and departure times of trains at each station. As another example, the format of the operation plan OP may be a digital timetable that each device references for control purposes.
運行管理装置50は、運行計画を参照して、列車の車両の少なくとも何れかに関する運行制御を行う。一例として、運行管理装置50は、更新後の運行計画UOPを参照して、1又は複数の車両の少なくとも何れかに関する運行制御を行う。例えば、運行管理装置50は、更新後の運行計画UOPに含まれる情報であって、列車の車両の少なくとも何れかに関する運行制御を行うために参照する運行制御参照情報を参照して、列車の車両の少なくとも何れかに関する運行制御を行う。例えば、運行管理装置50は、更新後の運行計画UOPを参照して、列車の運行を制御する信号52を制御することにより、運行制御を行う。また、運行管理装置50は、更新後の運行計画UOPを状況把握支援装置55に出力してもよい。The
検査計画装置51は、列車の検査を計画する。一例として、検査計画装置51は、更新後の運行計画UOPに含まれる情報であって、列車の車両の少なくとも何れかの検査計画に関する検査計画情報を参照し、検査を計画する。一例として、検査計画装置51は、或る列車の走行距離が所定の長さを超えた場合に、所定の検査を実施する日時を計画する。他の例として、検査計画装置51は、或る列車の走行時間が所定の長さを超えた場合、所定の検査を実施する日時を計画する。The
乗務員用端末53は、列車に乗車する乗務員が使用する端末である。一例として、乗務員用端末53は、更新後の運行計画UOPに含まれる情報であって、列車の車両の少なくとも何れかの乗務員に通知するための通知情報を参照して、更新後の運行計画UOPを乗務員に通知する。乗務員用端末53の例として、スマートフォン及びタブレットが挙げられるが、これらに限定されない。The
センサ54は、列車及び列車の運行に関する情報を出力するセンサである。センサ54には、図4に示すように、カメラ54A、重量計54B、及びレールセンサ54Cが含まれているが、これらに限定されない。例えば、マイク、温度計、加速度センサなどがセンサ54に含まれていてもよい。The
カメラ54Aは、画角に含まれる被写体を撮影する撮像装置である。一例として、カメラ54Aは列車の車両の少なくとも何れかの車載カメラであってもよい。この場合、カメラ54Aは、列車の周辺又は車両内部を撮影する。カメラ54Aは、撮影した画像(第1の撮像データ)を状況把握支援装置55に出力する。他の例として、カメラ54Aは、列車が停車する駅に設置されたカメラであってもよい。この場合、カメラ54Aは、列車が停車する駅における画像(第2の撮像データ)を状況把握支援装置55に出力する。
重量計54Bは、列車の車両の少なくとも何れかの重量を測定する。重量計54Bは、測定した重量を示す重量データを状況把握支援装置55に出力する。
レールセンサ54Cは、列車が走行する複数のレールのうち、列車の車両の少なくとも何れかが接触しているレールを示すデータを状況把握支援装置55に出力する。ここで、各レールの位置は決まっているため、レールセンサ54Cが出力する、列車の車両の少なくとも何れかが接触しているレールを示すデータは、列車の車両の少なくとも何れかの位置データである。The
状況把握支援装置55は、運行状況情報OSを生成する。一例として、状況把握支援装置55は、センサ54から出力された1または複数のデータの少なくとも何れかを参照して、運行状況情報OSを生成する。また、状況把握支援装置55は、運行管理装置50から出力された更新後の運行計画UOPをさらに参照して、運行状況情報OSを生成してもよい。The situation understanding
一例として、運行状況情報OSは、列車の位置を示す情報であってもよい。この場合、状況把握支援装置55は、レールセンサ54Cから出力されたデータを参照して、列車の位置を示す情報を生成する。As an example, the operation status information OS may be information indicating the position of the train. In this case, the situation understanding
他の例として、運行状況情報OSは、運行計画に対して遅延している時間を示す情報であってもよい。この場合、状況把握支援装置55は、更新後の運行計画UOPと、レールセンサ54Cから出力されたデータとを参照して、運行計画に対して遅延している時間を示す情報を生成する。As another example, the operation status information OS may be information indicating the amount of time that the operation plan is delayed. In this case, the situation understanding
さらに他の例として、運行状況情報OSは、列車の車両の少なくとも何れかの乗車率を示す情報であってもよい。この場合、状況把握支援装置55は、カメラ54Aから出力された車両内部の画像を参照して、列車の車両の少なくとも何れかの乗車率を示す情報を生成する。又は、状況把握支援装置55は、重量計54Bから出力された重量データを参照して、列車の車両の少なくとも何れかの乗車率を示す情報を生成する。As yet another example, the operation status information OS may be information indicating the occupancy rate of at least some of the train's cars. In this case, the situation understanding
さらに他の例として、運行状況情報OSは、生じた支障に関する情報(支障状況、回復見込時刻等)であってもよい。この場合、状況把握支援装置55は、カメラ54Aから出力された車両周辺(支障が生じた箇所)の画像を参照して、生じた支障に関する情報を生成する。As yet another example, the operation status information OS may be information about the disruption that has occurred (the disruption status, expected recovery time, etc.). In this case, the situation understanding
さらに他の例として、運行状況情報OSは、各駅のホーム又は改札の混雑状況を示す情報であってもよい。この場合、状況把握支援装置55は、カメラ54Aから出力された、駅構内を撮影した画像を参照して、各駅のホーム又は改札の混雑状況を示す情報を生成する。As yet another example, the operation status information OS may be information indicating the congestion status of the platform or ticket gates of each station. In this case, the situation understanding
このように、状況把握支援装置55は、センサ54から出力された1または複数のデータの少なくとも何れかを参照して、運行状況情報OSを生成するので、列車の運行に関連する運行状況情報OSを好適に生成することができる。In this way, the situation understanding
また、状況把握支援装置55は、外部のサービスに対して提供するための提供用情報を生成する。一例として、状況把握支援装置55は、センサ54から出力された1または複数のデータの少なくとも何れか、及び情報処理装置2Aが生成した更新後の運行計画の少なくとも何れかを参照して、提供用情報を生成する。状況把握支援装置55は、生成した提供用情報を、広告計画装置56、売店計画装置57、深夜バス運行計画装置58、及び宿泊需要予測装置59の少なくとも何れかに出力する。The situation understanding
広告計画装置56、売店計画装置57、深夜バス運行計画装置58、及び宿泊需要予測装置59は、それぞれ外部サービスの提供に関する計画又は予測する装置である。広告計画装置56は、駅又は駅周辺に出す広告を計画する装置である。売店計画装置57は、駅又は駅周辺の売店における商品の陳列を計画する装置である。深夜バス運行計画装置58は、駅または駅周辺において深夜に発着するバスの運行を計画する装置である。宿泊需要予測装置59は、駅の周辺における宿泊施設に対する需要を予測する装置である。The
一例として、広告計画装置56、売店計画装置57、深夜バス運行計画装置58、及び宿泊需要予測装置59は、それぞれ状況把握支援装置55から出力された提供用情報を参照して、外部サービスの提供を計画する。広告計画装置56、売店計画装置57、深夜バス運行計画装置58、及び宿泊需要予測装置59のそれぞれが実行する処理の例について、後述する。As an example, the
(情報処理装置2Aの構成)
情報処理装置2Aの構成について、図5を参照して説明する。図5は、情報処理装置2Aの構成を示すブロック図である。(Configuration of
The configuration of the
図5に示すように、情報処理装置2Aは、制御部20、記憶部30、通信部31、及び入出力部32を備えている。As shown in FIG. 5, the
記憶部30には、制御部20が参照するデータが格納されている。記憶部30の例として、フラッシュメモリ、HDD(Hard Disk Drive)、SSD(Solid State Drive)、又はこれらの組み合わせが挙げられるが、これらに限定されない。The
記憶部30に格納されているデータの例として、運行計画OP、運行状況情報OS、更新後の運行計画UOP、制約条件情報CC、及び学習済モデルLMが挙げられるが、これらに限定されない。また、記憶部30には、運行計画OP、運行状況情報OS、及び更新後の運行計画UOPは、運行計画OP、運行状況情報OS、及び更新後の運行計画UOPを含む学習用データTDとして格納されていてもよい。学習用データTDについては後述する。また、学習済モデルLMが記憶部30に格納されているとは、学習済モデルLMを規定するパラメータが記憶部30に格納されていることを示す。Examples of data stored in the
一例として、学習済モデルLMは、強化学習によって学習された学習済モデルであってもよい。学習済モデルLMの具体的構成は本例示的実施形態を限定するものではないが、一例として、CNN(Convolution Neural Network)、RNN(Recurrent Neural Network)、又はそれらの組み合わせを用いることができる。また、ランダムフォレストやサポートベクターマシンのような非ニューラルネットワーク型のモデルを用いてもよい。As an example, the learned model LM may be a learned model learned by reinforcement learning. Although the specific configuration of the learned model LM does not limit this exemplary embodiment, as an example, a CNN (Convolution Neural Network), an RNN (Recurrent Neural Network), or a combination thereof may be used. In addition, a non-neural network type model such as a random forest or a support vector machine may be used.
通信部31は、ネットワークを介してデータを送受信するインタフェースである。通信部31の例として、イーサネット(登録商標)、Wi-Fi(登録商標)、モバイルデータ通信網の無線通信規格といった各種通信規格における通信チップ、およびUSB準拠のコネクタが挙げられるが、これらに限定されない。The
通信部31は、一例として、制御部20から供給されたデータを他の装置に送信したり、他の装置から受信したデータを制御部20に供給したりする。As an example, the
入出力部32は、データの入力を受け付けたり、データを出力したりするインタフェースである。入出力部32の例として、キーボード、マウス、タッチパッド、マイク、液晶ディスプレイが挙げられるが、これらに限定されない。The input/
入出力部32は、データの入力を受け付けた場合、受け付けたデータを制御部10Aに供給する。また、入出力部32は、制御部10Aから供給されたデータを出力する。When the input/
(制御部20)
制御部20は、情報処理装置2Aが備える各構成要素を制御する。また、制御部20は、図5に示すように、第1の取得部11、第2の取得部12、第1の生成部13、出力部21、及び学習部22を備えている。第1の取得部11、第2の取得部12、第1の生成部13、及び学習部22は、それぞれ本例示的実施形態において、第1の取得手段、第2の取得手段、第1の生成手段、及び学習手段を実現する。(Control unit 20)
The
第1の取得部11は、列車の車両に関する運行計画OPを取得する。一例として、第1の取得部11は、入出力部32を介して更新前の運行計画OPを取得する。第1の取得部11は、取得した運行計画OPを記憶部30に格納する。The
また、第1の取得部11は、運行計画の立案における制約条件を示す制約条件情報CCを取得する。一例として、第1の取得部11は、入出力部32を介して制約条件情報CCを取得する。一例として、制約条件情報CCは、運行計画を立案するためのノウハウ(ルール)に関する情報である。他の例として、制約条件情報CCは、ダイヤを修正する条件に関する情報である。他の例として、制約条件情報CCは、列車に関係する人員(駅員、乗務員、及び列車を検査する検査員等)に関する情報である。The
また、第1の取得部11は、更新前の運行計画OP、運行状況情報OS、及び、更新後の運行計画OPを含む学習用データTDを取得する。第1の取得部11は、取得した学習用データTDを記憶部30に格納する。The
なお、学習用データTDは、第1の取得部11が更新前の運行計画OP、運行状況情報OS、及び、更新後の運行計画OPをそれぞれ別々に取得した後、関連付けることによって生成されてもよい。この場合、入出力部32を介して受け付けたユーザからの操作によって、学習用データTDが生成されてもよい。The learning data TD may be generated by the
他の例として、学習用データTDは、シミュレータを用いて生成されてもよい。一例として、学習用データTDは、シミュレータにおいて列車の運行に対する外乱(例えば、事故及び災害等)を起こすことによって生成されてもよい。この場合、シミュレータにおいて、更新前の運行計画で列車を運行させ、第1の取得部11は、更新前の運行計画OPを取得する。次に、シミュレータにおいて外乱を起こし、外乱後の運行状況を運行状況OSとして第1の取得部11は取得する。そして、シミュレータにおいて外乱後に運行計画を更新し、第1の取得部11は、更新後の運行計画OPを取得する。As another example, the learning data TD may be generated using a simulator. As one example, the learning data TD may be generated by causing a disturbance (e.g., an accident, disaster, etc.) to train operation in the simulator. In this case, in the simulator, the train is operated according to the operation plan before the update, and the
第2の取得部12は、列車の車両の少なくとも何れかの運行状況に関連する運行状況情報OSを取得する。一例として、第2の取得部12は、状況把握支援装置55から出力された運行状況情報OSを取得する。第2の取得部12は、取得した運行状況情報OSを記憶部30に格納する。The
第1の生成部13は、運行計画OPと運行状況情報OSとを参照し、学習済モデルLMを用いて更新後の運行計画OPを生成する。第1の生成部13は、更新後の運行計画OPを記憶部30に格納する。The
また、第1の生成部13は、記憶部30に格納されている制約条件情報CCを更に参照して更新後の運行計画OPを生成してもよい。The
出力部21は、通信部31を介して、または入出力部32に対して、データを出力する。一例として、出力部21は、通信部31を介して、更新後の運行計画OPを運行管理装置50、検査計画装置51、及び乗務員用端末53の少なくとも何れかに出力する。他の例として、出力部21は、更新後の運行計画OPを、液晶ディスプレイである入出力部32に出力する。この場合、入出力部32は、更新後の運行計画OPを含む画像を表示する。The
学習部22は、学習用データTDを参照した機械学習による最適化処理によって学習済モデルLMを生成する。上述したように、学習用データTDには、更新前の運行計画OP、運行状況情報OS、及び、更新後の運行計画OPが含まれる。そのため、学習部22が学習用データTDを参照した機械学習による最適化処理によって学習済モデルLMを生成することにより、情報処理装置2Aは、運行状況に応じた更新後の運行計画OPを生成することができる。The
一例として、学習部22は、乗車率を状態、臨時列車の本数を増やすことを行動として、好ましい状態および行動(乗車率が低く、かつ臨時列車の本数が少ない)であるほど値が小さくなるコスト関数、又は好ましい状態および行動であるほど値が大きくなる報酬関数を定義する。そして、学習部22は、コスト関数を最小化、又は報酬関数を最大化する学習済モデルLMを生成する。As an example, the
すなわち、学習部22は、更新前の運行計画OP及び運行状況情報OSを学習済モデルLMに入力し、コスト関数が最小、又は報酬関数が最大となる更新後の運行計画OPが出力されるように、学習済モデルLMを学習させる。In other words, the
好ましい状態の他の例として、駅員が少ない、駅のホームに人が少ない、及び改札に並んでいる人が少ないが挙げられるが、これらに限定されない。好ましい行動の例として、増員する駅員が少ない、乗務員の作業が少ない、及び出庫又は入庫する列車の数が少ないが挙げられるが、これらに限定されない。Other examples of favorable conditions include, but are not limited to, fewer station staff, fewer people on the station platform, and fewer people queuing at ticket gates. Examples of favorable behavior include, but are not limited to, fewer additional station staff, less work for train crew, and fewer trains leaving or entering the depot.
また、上述したように、第1の生成部13は、制約条件情報CCを更に参照して更新後の運行計画OPを生成してもよい。この場合、学習部22はさらに、コスト関数が最小、又は報酬関数が最大であり、かつ、制約条件情報CCを満たす更新後の運行計画OPが出力されるように、学習済モデルLMを学習させる。Furthermore, as described above, the
当該構成により、情報処理装置2Aは、運行状況に加えて、制約条件に応じた更新後の運行計画OPを生成することができる。With this configuration, the
(更新後の運行計画UOPの例1)
第1の生成部13が生成する更新後の運行計画UOPの一例について、図6を参照して説明する。図6は、更新後の運行計画UOPの例を示す図である。(Example 1 of the updated operation plan UOP)
An example of the updated operation plan UOP generated by the
一例として、第1の生成部13は、列車の車両の少なくとも何れかに関する運行制御を行うために運行管理装置50によって参照される運行制御参照情報を含む更新後の運行計画UOPを生成する。As an example, the
一例として、運行制御参照情報には、変更後のダイヤの情報(到着時刻及び発車時刻の変更、停車時間の変更等)が含まれている。他の例として、運行制御参照情報には、或る列車が或る駅において折り返すことを示す情報が含まれている。さらに他の例として、或る列車が出庫する時刻又は入庫する時刻を示す情報が含まれている。As one example, the operation control reference information includes information on a changed timetable (changes to arrival and departure times, changes to stop times, etc.). As another example, the operation control reference information includes information indicating that a certain train will turn back at a certain station. As yet another example, the operation control reference information includes information indicating the time that a certain train will depart or enter the depot.
出力部21が、入出力部32に運行制御参照情報を含む更新後の運行計画UOPを出力した場合に、入出力部32は、一例として、図6の上側に示す画像PIC1を表示する。画像PIC1では、或る駅において、列車番号「A123」が「6:00」に到着し、「6:02」に発車することが示されている。また、画像PIC1では、或る駅において、列車番号「B456」が「6:30」に到着し、「6:32」に発車することが示されている。When the
このように、第1の生成部13は、運行制御参照情報を含む更新後の運行計画UOPを生成する。そのため、情報処理装置2Aは、運行管理装置50に、更新後の運行計画UOPに基づいて列車を運行させることができる。In this way, the
換言すると、運行管理装置50は、更新後の運行計画UOPを参照して運行制御を行うので、情報処理装置2Aによって生成された、運行状況に応じた更新後の運行計画UOPに基づいて列車を運行することができる。In other words, the
(更新後の運行計画UOPの例2)
第1の生成部13が生成する更新後の運行計画UOPの他の例について、再び図6を参照して説明する。(Example 2 of the updated operation plan UOP)
Another example of the updated operation plan UOP generated by the
他の例として、第1の生成部13は、列車の乗務員に通知するための通知情報を生成する。As another example, the
一例として、通知情報には、変更後のダイヤの情報(到着時刻及び発車時刻の変更、停車時間の変更等)が含まれている。他の例として、通知情報には、列車の運行に支障が生じた区間を示す情報が含まれている。さらに他の例として、通知情報には、当該乗務員が乗っている列車が折り返る駅を示す情報が含まれている。さらに他の例として、通知情報には、当該乗務員が乗っている列車が出庫する時刻又は入庫する時刻を示す情報が含まれている。As one example, the notification information includes information on the changed timetable (changes to arrival and departure times, changes to stop times, etc.). As another example, the notification information includes information indicating the section where train operation is disrupted. As yet another example, the notification information includes information indicating the station where the train carrying the crew member will turn around. As yet another example, the notification information includes information indicating the time the train carrying the crew member will depart or enter the depot.
出力部21が、入出力部32に通知情報を含む更新後の運行計画UOPを出力した場合に、入出力部32は、一例として、図6の中央に示す画像PIC2を表示する。画像PIC2では、「A駅」と「B駅」との間で列車の運行に支障が生じたことが示されている。また、画像PIC2では、乗務員が乗っている列車が「C駅」において折り返すことが示されている。When the
このように、第1の生成部13は、通知情報を含む更新後の運行計画UOPを生成する。そのため、情報処理装置2Aは、列車の運行計画が変更になった場合、列車の乗務員に対してリアルタイムに変更後の運行計画を通知したり、運行状況を通知したりすることができる。In this way, the
(更新後の運行計画UOPの例3)
第1の生成部13が生成する更新後の運行計画UOPのさらに他の例について、再び図6を参照して説明する。(Example 3 of the updated operation plan UOP)
Still another example of the updated operation plan UOP generated by the
さらに他の例として、第1の生成部13は、列車の車両の少なくとも何れかの検査計画に関する検査計画情報を生成する。As yet another example, the
一例として、検査計画情報には、或る列車の所定期間における走行時間を示す情報が含まれている。他の例として、検査計画情報には、或る列車の所定期間における走行距離を示す情報が含まれている。As one example, the inspection plan information includes information indicating the running time of a certain train in a given period of time. As another example, the inspection plan information includes information indicating the running distance of a certain train in a given period of time.
出力部21が、入出力部32に検査計画情報を含む更新後の運行計画UOPを出力した場合に、入出力部32は、一例として、図6の下側に示すPIC3を表示する。画像PIC3では、列車番号「A123」の11月1日からの走行時間が「10時間」であり、走行距離が「300km」であることが示されている。また、画像PIC3では、列車番号「B456」の11月1日からの走行時間が「15時間」であり、走行距離が「400km」であることが示されている。When the
このように、第1の生成部13は、検査計画情報を含む更新後の運行計画UOPを生成する。そのため、情報処理装置2Aは、検査計画装置51に、いつどのような検査を列車に実施すればよいのかを計画させることができる。In this way, the
(情報処理システム1Aにおいて実行される処理)
情報処理システム1Aにおいて実行される処理の流れの一例について、図7を参照して説明する。図7は、情報処理システム1Aにおいて実行される処理の流れを示すフロー図である。(Processing Executed in
An example of the flow of processes executed in the
(ステップS21)
ステップS21において、情報処理装置2Aの第1の取得部11は、運行計画OPを取得する。第1の取得部11は、取得した運行計画OPを記憶部30に格納する。(Step S21)
In step S21, the
(ステップS22)
ステップS22において、状況把握支援装置55は、運行状況情報OSを生成する。上述したように、状況把握支援装置55は、センサ54から出力された1または複数のデータの少なくとも何れかを参照して、運行状況情報OSを生成してもよい。(Step S22)
In step S22, the situation understanding
(ステップS23)
ステップS23において、状況把握支援装置55は、ステップS22において生成した生成した運行状況情報OSを情報処理装置2Aに出力する。(Step S23)
In step S23, the situation grasping
(ステップS24)
ステップS24において、情報処理装置2Aの第2の取得部12は、ステップS23において出力された運行状況情報OSを取得する。第2の取得部12は、取得した運行状況情報OSを記憶部30に格納する。(Step S24)
In step S24, the
(ステップS25)
ステップS25において、第1の生成部13は、ステップS21において取得された運行計画OPと、ステップS24において取得された運行状況情報OSとを参照し、学習済モデルLMを用いて更新後の運行計画UOPを生成する。第1の生成部13は、生成した更新後の運行計画UOPを記憶部30に格納する。(Step S25)
In step S25, the
(ステップS26)
ステップS26において、出力部21は、ステップS25において生成された更新後の運行計画UOPを運行管理装置50に出力する。なお、ステップS26において出力部21はさらに、更新後の運行計画UOPを、入出力部32、検査計画装置51、及び乗務員用端末53の少なくとも何れかに出力してもよい。(Step S26)
In step S26, the
(ステップS27)
ステップS27において、運行管理装置50は、ステップS26において出力された更新後の運行計画UOPを取得する。(Step S27)
In step S27, the
(ステップS28)
ステップS28において、運行管理装置50は、更新後の運行計画UOPを参照して、列車に関する運行制御を行う。(Step S28)
In step S28, the
(ステップS29)
ステップS29において、状況把握支援装置55は、運行状況情報OSを生成する。ここで、ステップS29において状況把握支援装置55が生成する運行状況情報OSは、ステップS25において生成された更新後の運行計画UOPを参照して運行制御された列車の運行状況に関連する運行状況情報OSである。(Step S29)
In step S29, the situation grasping
(ステップS30)
ステップS30において、状況把握支援装置55は、ステップS29において生成した生成した運行状況情報OSを情報処理装置2Aに出力する。(Step S30)
In step S30, the situation grasping
(ステップS31)
ステップS31において、情報処理装置2Aの第2の取得部12は、ステップS30において出力された運行状況情報OSを取得する。すなわち、第2の取得部12は、更新後の運行計画UOPを参照した運行管理装置50により運行制御された列車の運行状況に関連する運行状況情報OSを取得する。第2の取得部12は、取得した運行状況情報OSを記憶部30に格納する。(Step S31)
In step S31, the
ステップS31の処理が実行されると、情報処理装置2Aは、再びステップS25の処理を実行する。すなわち、ステップS25において第1の生成部13は、ステップS31において取得された運行状況情報OSを少なくとも参照して、再更新後の運行計画UOPを生成する。After the process of step S31 is executed, the
より具体的には、n+1回目のステップS25では、n回目のステップS25において生成された更新後の運行計画UOPと、当該更新後の運行計画UOPを参照して運行制御された列車の運行状況に関連する運行状況情報OSであって、n回目のステップS31において取得された運行状況情報OSとを参照して、学習済モデルLMを用いて再更新後の運行計画UOPを生成される。More specifically, in step S25 for the n+1th time, a re-updated operation plan UOP is generated using the learned model LM by referring to the updated operation plan UOP generated in step S25 for the nth time and operation status information OS related to the operation status of the train whose operation is controlled by referring to the updated operation plan UOP and which is acquired in step S31 for the nth time.
このように、情報処理装置2Aは、更新した運行計画UOPを参照して運行制御された列車の運行状況に関連する運行状況情報OSと、当該更新した運行計画UOPとを参照し、再更新後の運行計画UOPを生成する。そして、情報処理装置2Aは、当該処理を繰り返し実行する。すなわち、情報処理装置2Aは、フィードバック制御を行うので、一時的な運行状況の変化による影響を少なくし、安定して適切な更新後の運行計画UOPを生成することができる。In this way, the
(ステップS29における処理の他の例)
ステップS29において、状況把握支援装置55は、運行状況情報を生成することに加えて又は替えて、提供用情報を生成してもよい。上述したように、状況把握支援装置55は、センサ54から出力された1または複数のデータの少なくとも何れか、及び情報処理装置2Aが生成した更新後の運行計画の少なくとも何れかを参照して、提供用情報を生成してもよい。当該構成について、図8を参照して説明する。図8は、提供用情報の例を示す図である。(Another example of the process in step S29)
In step S29, the situation grasping
一例として、状況把握支援装置55は、広告サービスにおいて参照される広告サービス用情報を含む提供用情報を生成する。例えば、状況把握支援装置55は、或る駅において、これから到着する予定の列車に設置されたカメラ54Aから出力された車両内部の画像を参照する。そして、画像に被写体として高校生が多く含まれている場合、状況把握支援装置55は、図9に示すように、これから到着する予定の列車には、高校生が多く乗っていることを示す広告サービス用情報を含む提供用情報SPIを生成する。As an example, the situation understanding
この場合、状況把握支援装置55は、生成した提供用情報を広告計画装置56に出力する。広告計画装置56は、提供用情報に含まれる広告サービス用情報を参照し、或る駅に設置したデジタルサイネージ端末に、高校生向けの広告を表示するよう計画する。In this case, the situation understanding
このように、状況把握支援装置55は、広告サービス用情報を含む提供用情報を生成することにより、駅又は駅周辺に好適な広告を表示させることができる。In this way, the situation understanding
他の例として、状況把握支援装置55は、小売りサービスにおいて参照される小売りサービス用情報を含む提供用情報を生成する。例えば、状況把握支援装置55は、或る駅において、所定の期間においてカメラ54Aから出力された18時から19時の駅構内の画像を参照する。そして、画像に被写体としてスーツを着た人が多く含まれている場合、状況把握支援装置55は、図9に示すように、18時から19時の間、スーツを着た人が駅構内に多くいることを示す小売りサービス用情報を含む提供用情報SPI2を生成する。As another example, the situation understanding
この場合、状況把握支援装置55は、生成した提供用情報を売店計画装置57に出力する。売店計画装置57は、提供用情報に含まれる小売りサービス用情報を参照し、或る駅の構内または周辺の売店に、18時から19時の間は会社員向けの商品を棚に陳列することを計画する。In this case, the situation understanding
このように、状況把握支援装置55は、小売りサービス用情報を含む提供用情報を生成することにより、駅構内又は駅周辺の売店に好適な商品を陳列させることができる。In this way, the situation understanding
さらに他の例として、状況把握支援装置55は、他の交通サービスにおいて参照される交通サービス用情報を含む提供用情報を生成する。例えば、状況把握支援装置55は、或る駅において、最終列車から出力された重量データを参照する。そして、重量データが所定の値以上の場合、状況把握支援装置55は、図9に示すように、最終列車に乗客が多く乗っていることを示す交通サービス用情報を含む提供用情報SPI3を生成する。As yet another example, the situation understanding
この場合、状況把握支援装置55は、生成した提供用情報を深夜バス運行計画装置58に出力する。深夜バス運行計画装置58は、提供用情報に含まれる交通サービス用情報を参照し、或る駅から出発する深夜バスの本数を増やすことを計画する。In this case, the situation understanding
このように、状況把握支援装置55は、交通サービス用情報を含む提供用情報を生成することにより、駅又は駅周辺において発着する交通サービスを好適に運行させることができる。In this way, the situation understanding
さらに他の例として、状況把握支援装置55は、宿泊サービスにおいて参照される宿泊サービス用情報を含む提供用情報を生成する。例えば、状況把握支援装置55は、カメラ54Aから出力された或る駅周辺の画像を参照する。そして、画像に被写体として、或る駅の周辺においてイベントが行われることを示す広告が含まれている場合、状況把握支援装置55は、図8に示すように、或る駅の周辺においてイベントが行われることを示す宿泊サービス用情報を含む提供用情報SPI4を生成する。As yet another example, the situation understanding
この場合、状況把握支援装置55は、生成した提供用情報を宿泊需要予測装置59に出力する。宿泊需要予測装置59は、提供用情報に含まれる宿泊サービス用情報を参照し、或る駅の周辺の宿泊施設に対する需要が多くなることを予測する。In this case, the situation understanding
このように、状況把握支援装置55は、宿泊サービス用情報を含む提供用情報を生成することにより、駅周辺における宿泊施設の需要を好適に予測させることができる。In this way, the situation understanding
(情報処理システム1Aの効果)
このように、情報処理システム1Aでは、列車の運行計画と、列車の運行状況とを参照し、学習済モデルを用いて更新後の運行計画を生成する。そのため、情報処理システム1Aでは、学習済モデルを用いて運行計画を更新するので、非属人的に、運行計画を適切に更新することができる。また、情報処理システム1Aでは、運行状況の変化に対して迅速に運行計画を更新することができる。(Effects of
In this way, the
〔ソフトウェアによる実現例〕
情報処理システム1、1A、情報処理装置2、2A(以下、「上記各システム及び各装置」とも記載する)の一部又は全部の機能は、集積回路(ICチップ)等のハードウェアによって実現してもよいし、ソフトウェアによって実現してもよい。[Software implementation example]
Some or all of the functions of the
後者の場合、上記各システム及び各装置は、例えば、各機能を実現するソフトウェアであるプログラムの命令を実行するコンピュータによって実現される。このようなコンピュータの一例(以下、コンピュータCと記載する)を図9に示す。図9は、上記各システム及び各装置として機能するコンピュータCのハードウェア構成を示すブロック図である。In the latter case, each of the above systems and devices is realized, for example, by a computer that executes instructions of a program, which is software that realizes each function. An example of such a computer (hereinafter referred to as computer C) is shown in Figure 9. Figure 9 is a block diagram showing the hardware configuration of computer C that functions as each of the above systems and devices.
コンピュータCは、少なくとも1つのプロセッサC1と、少なくとも1つのメモリC2と、を備えている。メモリC2には、コンピュータCを上記各システム及び各装置として動作させるためのプログラムPが記録されている。コンピュータCにおいて、プロセッサC1は、プログラムPをメモリC2から読み取って実行することにより、上記各システム及び各装置の各機能が実現される。Computer C has at least one processor C1 and at least one memory C2. Memory C2 stores a program P for operating computer C as each of the above systems and devices. In computer C, processor C1 reads and executes program P from memory C2, thereby realizing the functions of each of the above systems and devices.
プロセッサC1としては、例えば、CPU(Central Processing Unit)、GPU(Graphic Processing Unit)、DSP(Digital Signal Processor)、MPU(Micro Processing Unit)、FPU(Floating point number Processing Unit)、PPU(Physics Processing Unit)、TPU(Tensor Processing Unit)、量子プロセッサ、マイクロコントローラ、又は、これらの組み合わせなどを用いることができる。メモリC2としては、例えば、フラッシュメモリ、HDD(Hard Disk Drive)、SSD(Solid State Drive)、又は、これらの組み合わせなどを用いることができる。The processor C1 may be, for example, a CPU (Central Processing Unit), GPU (Graphic Processing Unit), DSP (Digital Signal Processor), MPU (Micro Processing Unit), FPU (Floating point number Processing Unit), PPU (Physics Processing Unit), TPU (Tensor Processing Unit), quantum processor, microcontroller, or a combination of these. The memory C2 may be, for example, a flash memory, HDD (Hard Disk Drive), SSD (Solid State Drive), or a combination of these.
なお、コンピュータCは、プログラムPを実行時に展開したり、各種データを一時的に記憶したりするためのRAM(Random Access Memory)を更に備えていてもよい。また、コンピュータCは、他の装置との間でデータを送受信するための通信インタフェースを更に備えていてもよい。また、コンピュータCは、キーボードやマウス、ディスプレイやプリンタなどの入出力機器を接続するための入出力インタフェースを更に備えていてもよい。Computer C may further include a RAM (Random Access Memory) for expanding program P during execution and for temporarily storing various data. Computer C may further include a communications interface for sending and receiving data to and from other devices. Computer C may further include an input/output interface for connecting input/output devices such as a keyboard, mouse, display, and printer.
また、プログラムPは、コンピュータCが読み取り可能な、一時的でない有形の記録媒体Mに記録することができる。このような記録媒体Mとしては、例えば、テープ、ディスク、カード、半導体メモリ、又はプログラマブルな論理回路などを用いることができる。コンピュータCは、このような記録媒体Mを介してプログラムPを取得することができる。また、プログラムPは、伝送媒体を介して伝送することができる。このような伝送媒体としては、例えば、通信ネットワーク、又は放送波などを用いることができる。コンピュータCは、このような伝送媒体を介してプログラムPを取得することもできる。The program P can also be recorded on a non-transitory, tangible recording medium M that can be read by the computer C. Such a recording medium M can be, for example, a tape, a disk, a card, a semiconductor memory, or a programmable logic circuit. The computer C can obtain the program P via such a recording medium M. The program P can also be transmitted via a transmission medium. Such a transmission medium can be, for example, a communications network or broadcast waves. The computer C can also obtain the program P via such a transmission medium.
〔付記事項A〕
本開示には、以下の各付記に記載の技術が含まれる。ただし、本発明は、以下の各付記に記載の技術に限定されるものではなく、請求項に示した範囲で種々の変更が可能である。[Appendix A]
This disclosure includes the techniques described in the following appendices. However, the present invention is not limited to the techniques described in the following appendices, and various modifications are possible within the scope of the claims.
(付記A1)
予め定められた軌道に沿って運行される1又は複数の車両に関する運行計画を取得する第1の取得手段と、
前記1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を取得する第2の取得手段と、
前記運行計画と前記運行状況情報とを参照し、学習済モデルを用いて更新後の運行計画を生成する第1の生成手段と
を備えている
情報処理システム。(Appendix A1)
A first acquisition means for acquiring an operation plan for one or more vehicles that are operated along a predetermined trajectory;
A second acquisition means for acquiring operation status information related to at least any operation status of the one or more vehicles;
An information processing system comprising: a first generation means that refers to the operation plan and the operation status information and generates an updated operation plan using a trained model.
(付記A2)
前記更新後の運行計画を参照して、前記1又は複数の車両の少なくとも何れかに関する運行制御を行う運行制御手段
を備えている付記A1に記載の情報処理システム。(Appendix A2)
The information processing system according to appendix A1, further comprising an operation control means for performing operation control for at least one of the one or more vehicles by referring to the updated operation plan.
(付記A3)
前記第1の生成手段が生成した前記更新後の運行計画には、
前記1又は複数の車両の少なくとも何れかに関する運行制御を行うために前記運行制御手段によって参照される運行制御参照情報、
前記1又は複数の車両の少なくとも何れかの乗務員に通知するための通知情報、及び
前記1又は複数の車両の少なくとも何れかの検査計画に関する検査計画情報
の少なくとも何れかが含まれる
付記A2に記載の情報処理システム。(Appendix A3)
The updated operation plan generated by the first generation means includes:
Operation control reference information referenced by the operation control means in order to perform operation control for at least one of the one or more vehicles;
The information processing system according to appendix A2, comprising at least one of notification information for notifying at least any crew member of the one or more vehicles, and inspection plan information regarding an inspection plan of at least any of the one or more vehicles.
(付記A4)
前記第2の取得手段は、前記更新後の運行計画を参照した前記運行制御手段により運行制御された前記1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を更に取得し、
前記第1の生成手段は、当該運行状況情報を少なくとも参照して、再更新後の運行計画を生成する
付記A2又はA3に記載の情報処理システム。(Appendix A4)
The second acquisition means further acquires operation status information related to an operation status of at least one of the one or more vehicles whose operation is controlled by the operation control means with reference to the updated operation plan,
The information processing system according to
(付記A5)
前記第1の取得手段は、前記運行計画の立案における制約条件を示す制約条件情報を更に取得し、
前記第1の生成手段は、前記制約条件情報を更に参照して前記更新後の運行計画を生成する
付記A1からA4の何れか1つに記載の情報処理システム。(Appendix A5)
The first acquisition means further acquires constraint condition information indicating constraint conditions in planning the operation plan,
The information processing system according to any one of appendices A1 to A4, wherein the first generation means generates the updated operation plan by further referring to the constraint condition information.
(付記A6)
前記1又は複数の車両の少なくとも何れかの車載カメラによる第1の撮像データ、
前記1又は複数の車両の少なくとも何れかの重量データ、
前記1又は複数の車両の少なくとも何れかが停車する駅における第2の撮像データ、及び
前記1又は複数の車両の少なくとも何れかの位置データ
の少なくとも何れかを参照して、前記運行状況情報を生成する第2の生成手段を備えている付記A1からA5の何れか1つに記載の情報処理システム。(Appendix A6)
First imaging data captured by at least one vehicle-mounted camera of the one or more vehicles;
Weight data of at least one of the one or more vehicles;
The information processing system according to any one of Appendices A1 to A5, further comprising a second generating means for generating the operation status information by referring to at least any of second image data at a station where at least any of the one or more vehicles stop, and at least any of position data of at least any of the one or more vehicles.
(付記A7)
外部のサービスに対して提供するための提供用情報を、
前記第2の生成手段が参照する前記第1の撮像データ、前記重量データ、前記第2の撮像データ、及び前記位置データ、及び
前記第1の生成手段が生成する前記更新後の運行計画
の少なくとも何れかを参照して生成する第3の生成手段を備えている付記A6に記載の情報処理システム。(Appendix A7)
Information to be provided to external services,
The information processing system according to Appendix A6, further comprising: a third generation means that generates the updated operation plan by referring to at least any of the first imaging data, the weight data, the second imaging data, and the position data that are referred to by the second generation means, and the updated operation plan generated by the first generation means.
(付記A8)
前記提供用情報には、
広告サービスにおいて参照される広告サービス用情報、
小売りサービスにおいて参照される小売りサービス用情報、
他の交通サービスにおいて参照される交通サービス用情報、及び
宿泊サービスにおいて参照される宿泊サービス用情報
の少なくとも何れかが含まれる
付記A7に記載の情報処理システム。(Appendix A8)
The information to be provided includes:
Information for advertising services referenced in advertising services;
Information for retail services referenced in retail services;
The information processing system according to appendix A7, comprising at least one of: information for a transportation service referenced in another transportation service; and information for an accommodation service referenced in an accommodation service.
(付記A9)
前記第1の取得手段は、
更新前の運行計画、運行状況情報、及び、更新後の運行計画を含む学習用データ
を更に取得し、
当該情報処理システムは、
前記学習用データを参照した機械学習による最適化処理によって前記学習済モデルを生成する学習手段
を更に備えている
付記A1からA8の何れか1つに記載の情報処理システム。(Appendix A9)
The first acquisition means includes:
Further acquiring learning data including the operation plan before the update, operation status information, and the operation plan after the update;
The information processing system includes:
The information processing system according to any one of appendices A1 to A8, further comprising a learning means for generating the trained model by an optimization process using machine learning with reference to the learning data.
(付記A10)
予め定められた軌道に沿って運行される1又は複数の車両に関する運行計画を取得する第1の取得手段と、
前記1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を取得する第2の取得手段と、
前記運行計画と前記運行状況情報とを参照し、学習済モデルを用いて更新後の運行計画を生成する第1の生成手段と
を備えている
情報処理装置。(Appendix A10)
A first acquisition means for acquiring an operation plan for one or more vehicles that are operated along a predetermined trajectory;
A second acquisition means for acquiring operation status information related to at least any operation status of the one or more vehicles;
and a first generation means for generating an updated operation plan by referring to the operation plan and the operation status information and using a trained model.
〔付記事項B〕
本開示には、以下の各付記に記載の技術が含まれる。ただし、本発明は、以下の各付記に記載の技術に限定されるものではなく、請求項に示した範囲で種々の変更が可能である。[Appendix B]
This disclosure includes the techniques described in the following appendices. However, the present invention is not limited to the techniques described in the following appendices, and various modifications are possible within the scope of the claims.
(付記B1)
少なくとも1つのプロセッサが、予め定められた軌道に沿って運行される1又は複数の車両に関する運行計画を取得する第1の取得処理と、
前記少なくとも1つのプロセッサが、前記1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を取得する第2の取得処理と、
前記少なくとも1つのプロセッサが、前記運行計画と前記運行状況情報とを参照し、学習済モデルを用いて更新後の運行計画を生成する第1の生成処理と
を含んでいる
情報処理方法。(Appendix B1)
A first acquisition process in which at least one processor acquires a trip plan for one or more vehicles that are operated along a predetermined trajectory;
A second acquisition process in which the at least one processor acquires operation status information related to at least any operation status of the one or more vehicles;
An information processing method including a first generation process in which the at least one processor refers to the operation plan and the operation status information and generates an updated operation plan using a learned model.
(付記B2)
前記少なくとも1つのプロセッサが、前記更新後の運行計画を参照して、前記1又は複数の車両の少なくとも何れかに関する運行制御を行う運行制御処理
を含んでいる付記B1に記載の情報処理方法。(Appendix B2)
The information processing method according to appendix B1, further comprising a process of controlling operation of the at least one processor by referring to the updated operation plan and controlling operation of at least one of the one or more vehicles.
(付記B3)
前記第1の生成処理において生成した前記更新後の運行計画には、
前記1又は複数の車両の少なくとも何れかに関する運行制御を行うために前記運行制御処理によって参照される運行制御参照情報、
前記1又は複数の車両の少なくとも何れかの乗務員に通知するための通知情報、及び
前記1又は複数の車両の少なくとも何れかの検査計画に関する検査計画情報
の少なくとも何れかが含まれる
付記B2に記載の情報処理方法。(Appendix B3)
The updated operation plan generated in the first generation process includes:
Operation control reference information referenced by the operation control process to perform operation control for at least one of the one or more vehicles;
The information processing method according to appendix B2, which includes at least one of notification information for notifying at least any crew member of the one or more vehicles, and inspection plan information regarding an inspection plan of at least any of the one or more vehicles.
(付記B4)
前記少なくとも1つのプロセッサは、
前記第2の取得処理において、前記更新後の運行計画を参照した前記運行制御処理において運行制御された前記1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を更に取得し、
前記第1の生成処理において、当該運行状況情報を少なくとも参照して、再更新後の運行計画を生成する
付記B2又はB3に記載の情報処理方法。(Appendix B4)
The at least one processor
In the second acquisition process, operation status information related to at least any operation status of the one or more vehicles whose operation is controlled in the operation control process with reference to the updated operation plan is further acquired;
The information processing method according to
(付記B5)
前記少なくとも1つのプロセッサは、
前記第1の取得処理において、前記運行計画の立案における制約条件を示す制約条件情報を更に取得し、
前記第1の生成処理において、前記制約条件情報を更に参照して前記更新後の運行計画を生成する
付記B1からB4の何れか1つに記載の情報処理方法。(Appendix B5)
The at least one processor
In the first acquisition process, constraint condition information indicating a constraint condition in creating the operation plan is further acquired,
The information processing method according to any one of appendices B1 to B4, wherein in the first generation process, the updated operation plan is generated by further referring to the constraint condition information.
(付記B6)
前記1又は複数の車両の少なくとも何れかの車載カメラによる第1の撮像データ、
前記1又は複数の車両の少なくとも何れかの重量データ、
前記1又は複数の車両の少なくとも何れかが停車する駅における第2の撮像データ、及び
前記1又は複数の車両の少なくとも何れかの位置データ
の少なくとも何れかを参照して、前記少なくとも1つのプロセッサが、前記運行状況情報を生成する第2の生成処理を含んでいる付記B1からB5の何れか1つに記載の情報処理方法。(Appendix B6)
First imaging data captured by at least one vehicle-mounted camera of the one or more vehicles;
Weight data of at least one of the one or more vehicles;
The information processing method according to any one of Appendices B1 to B5, further comprising a second generation process in which the at least one processor generates the operation status information by referring to at least one of second imaging data at a station where at least one of the one or more vehicles stops, and at least one of position data of at least one of the one or more vehicles.
(付記B7)
前記少なくとも1つのプロセッサが、外部のサービスに対して提供するための提供用情報を、
前記第2の生成処理において参照する前記第1の撮像データ、前記重量データ、前記第2の撮像データ、及び前記位置データ、及び
前記第1の生成処理において生成する前記更新後の運行計画
の少なくとも何れかを参照して生成する第3の生成処理を含んでいる付記B6に記載の情報処理方法。(Appendix B7)
The at least one processor generates provision information to be provided to an external service,
The information processing method according to Appendix B6, including a third generation process that generates the operation plan by referring to at least any of the first imaging data, the weight data, the second imaging data, and the position data that are referenced in the second generation process, and the updated operation plan generated in the first generation process.
(付記B8)
前記提供用情報には、
広告サービスにおいて参照される広告サービス用情報、
小売りサービスにおいて参照される小売りサービス用情報、
他の交通サービスにおいて参照される交通サービス用情報、及び
宿泊サービスにおいて参照される宿泊サービス用情報
の少なくとも何れかが含まれる
付記B7に記載の情報処理方法。(Appendix B8)
The information to be provided includes:
Information for advertising services referenced in advertising services;
Information for retail services referenced in retail services;
The information processing method according to appendix B7, comprising at least one of information for a transportation service referred to in another transportation service, and information for an accommodation service referred to in an accommodation service.
(付記B9)
前記少なくとも1つのプロセッサは、更新前の運行計画、運行状況情報、及び、更新後の運行計画を含む学習用データを更に取得し、
前記少なくとも1つのプロセッサが、前記学習用データを参照した機械学習による最適化処理によって前記学習済モデルを生成する学習処理
を更に含んでいる
付記B1からB8の何れか1つに記載の情報処理方法。(Appendix B9)
The at least one processor further acquires learning data including an operation plan before the update, operation status information, and an operation plan after the update;
The information processing method according to any one of appendices B1 to B8, further comprising a learning process in which the at least one processor generates the trained model by an optimization process using machine learning that references the training data.
〔付記事項C〕
本開示には、以下の各付記に記載の技術が含まれる。ただし、本発明は、以下の各付記に記載の技術に限定されるものではなく、請求項に示した範囲で種々の変更が可能である。[Appendix C]
This disclosure includes the techniques described in the following appendices. However, the present invention is not limited to the techniques described in the following appendices, and various modifications are possible within the scope of the claims.
(付記C1)
情報処理装置としてコンピュータを機能させるプログラムであって、
前記コンピュータを、
予め定められた軌道に沿って運行される1又は複数の車両に関する運行計画を取得する第1の取得手段と、
前記1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を取得する第2の取得手段と、
前記運行計画と前記運行状況情報とを参照し、学習済モデルを用いて更新後の運行計画を生成する第1の生成手段と
として機能させる
プログラム。(Appendix C1)
A program for causing a computer to function as an information processing device,
The computer,
A first acquisition means for acquiring an operation plan for one or more vehicles that are operated along a predetermined trajectory;
A second acquisition means for acquiring operation status information related to at least any operation status of the one or more vehicles;
A program that functions as a first generation means that refers to the operation plan and the operation status information and generates an updated operation plan using a learned model.
(付記C2)
前記コンピュータを、
前記更新後の運行計画を参照して、前記1又は複数の車両の少なくとも何れかに関する運行制御を行う運行制御手段
として機能させる付記C1に記載のプログラム。(Appendix C2)
The computer,
The program according to claim C1, which functions as a traffic control means for controlling traffic of at least one of the one or more vehicles by referring to the updated traffic plan.
(付記C3)
前記第1の生成手段が生成した前記更新後の運行計画には、
前記1又は複数の車両の少なくとも何れかに関する運行制御を行うために前記運行制御手段によって参照される運行制御参照情報、
前記1又は複数の車両の少なくとも何れかの乗務員に通知するための通知情報、及び
前記1又は複数の車両の少なくとも何れかの検査計画に関する検査計画情報
の少なくとも何れかが含まれる
付記C2に記載のプログラム。(Appendix C3)
The updated operation plan generated by the first generation means includes:
Operation control reference information referenced by the operation control means in order to perform operation control for at least one of the one or more vehicles;
The program described in Appendix C2, which includes at least one of notification information for notifying at least any crew member of the one or more vehicles, and inspection plan information regarding an inspection plan of at least any of the one or more vehicles.
(付記C4)
前記第2の取得手段は、前記更新後の運行計画を参照した前記運行制御手段により運行制御された前記1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を更に取得し、
前記第1の生成手段は、当該運行状況情報を少なくとも参照して、再更新後の運行計画を生成する
付記C2又はC3に記載のプログラム。(Appendix C4)
The second acquisition means further acquires operation status information related to an operation status of at least one of the one or more vehicles whose operation is controlled by the operation control means with reference to the updated operation plan,
The program according to
(付記C5)
前記第1の取得手段は、前記運行計画の立案における制約条件を示す制約条件情報を更に取得し、
前記第1の生成手段は、前記制約条件情報を更に参照して前記更新後の運行計画を生成する
付記C1からC4の何れか1つに記載のプログラム。(Appendix C5)
The first acquisition means further acquires constraint condition information indicating constraint conditions in planning the operation plan,
The program according to any one of appendices C1 to C4, wherein the first generation means generates the updated operation plan by further referring to the constraint condition information.
(付記C6)
前記コンピュータを、
前記1又は複数の車両の少なくとも何れかの車載カメラによる第1の撮像データ、
前記1又は複数の車両の少なくとも何れかの重量データ、
前記1又は複数の車両の少なくとも何れかが停車する駅における第2の撮像データ、及び
前記1又は複数の車両の少なくとも何れかの位置データ
の少なくとも何れかを参照して、前記運行状況情報を生成する第2の生成手段として機能させる付記C1からC5の何れか1つに記載のプログラム。(Appendix C6)
The computer,
First imaging data captured by at least one vehicle-mounted camera of the one or more vehicles;
Weight data of at least one of the one or more vehicles;
The program described in any one of appendices C1 to C5 functions as a second generation means for generating the operation status information by referring to at least one of second image data at a station where at least one of the one or more vehicles stops, and at least one of position data of at least one of the one or more vehicles.
(付記C7)
前記コンピュータを、
外部のサービスに対して提供するための提供用情報を、
前記第2の生成手段が参照する前記第1の撮像データ、前記重量データ、前記第2の撮像データ、及び前記位置データ、及び
前記第1の生成手段が生成する前記更新後の運行計画
の少なくとも何れかを参照して生成する第3の生成手段として機能させる付記C6に記載のプログラム。(Appendix C7)
The computer,
Information to be provided to external services,
The program described in Appendix C6 causes the program to function as a third generation means that generates the operation plan by referring to at least any of the first imaging data, the weight data, the second imaging data, and the position data referenced by the second generation means, and the updated operation plan generated by the first generation means.
(付記C8)
前記提供用情報には、
広告サービスにおいて参照される広告サービス用情報、
小売りサービスにおいて参照される小売りサービス用情報、
他の交通サービスにおいて参照される交通サービス用情報、及び
宿泊サービスにおいて参照される宿泊サービス用情報
の少なくとも何れかが含まれる
付記C7に記載のプログラム。(Appendix C8)
The information to be provided includes:
Information for advertising services referenced in advertising services;
Information for retail services referenced in retail services;
The program described in Appendix C7, which includes at least one of information for transportation services referenced in other transportation services, and information for accommodation services referenced in accommodation services.
(付記C9)
前記第1の取得手段は、
更新前の運行計画、運行状況情報、及び、更新後の運行計画を含む学習用データ
を更に取得し、
前記コンピュータを、
前記学習用データを参照した機械学習による最適化処理によって前記学習済モデルを生成する学習手段
として更に機能させる
付記C1からC8の何れか1つに記載のプログラム。(Appendix C9)
The first acquisition means includes:
Further acquiring learning data including the operation plan before the update, operation status information, and the operation plan after the update;
The computer,
The program according to any one of appendices C1 to C8, further functioning as a learning means for generating the trained model by an optimization process using machine learning with reference to the training data.
〔付記事項D〕
本開示には、以下の各付記に記載の技術が含まれる。ただし、本発明は、以下の各付記に記載の技術に限定されるものではなく、請求項に示した範囲で種々の変更が可能である。[Appendix D]
This disclosure includes the techniques described in the following appendices. However, the present invention is not limited to the techniques described in the following appendices, and various modifications are possible within the scope of the claims.
(付記D1)
少なくとも1つのプロセッサを備え、前記少なくとも1つのプロセッサは、
予め定められた軌道に沿って運行される1又は複数の車両に関する運行計画を取得する第1の取得処理と、
前記1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を取得する第2の取得処理と、
前記運行計画と前記運行状況情報とを参照し、学習済モデルを用いて更新後の運行計画を生成する第1の生成処理と
を実行する
情報処理システム。(Appendix D1)
At least one processor, the at least one processor comprising:
A first acquisition process for acquiring an operation plan for one or more vehicles that are operated along a predetermined trajectory;
A second acquisition process of acquiring operation status information related to at least any operation status of the one or more vehicles;
An information processing system that executes a first generation process that refers to the operation plan and the operation status information and generates an updated operation plan using a learned model.
(付記D2)
前記少なくとも1つのプロセッサは、
前記更新後の運行計画を参照して、前記1又は複数の車両の少なくとも何れかに関する運行制御を行う運行制御処理
を実行する付記D1に記載の情報処理システム。(Appendix D2)
The at least one processor
The information processing system according to appendix D1, which executes a driving control process for controlling driving of at least one of the one or more vehicles by referring to the updated driving plan.
(付記D3)
前記第1の生成処理において生成した前記更新後の運行計画には、
前記1又は複数の車両の少なくとも何れかに関する運行制御を行うために前記運行制御処理において参照される運行制御参照情報、
前記1又は複数の車両の少なくとも何れかの乗務員に通知するための通知情報、及び
前記1又は複数の車両の少なくとも何れかの検査計画に関する検査計画情報
の少なくとも何れかが含まれる
付記D2に記載の情報処理システム。(Appendix D3)
The updated operation plan generated in the first generation process includes:
Operation control reference information that is referenced in the operation control process to perform operation control for at least one of the one or more vehicles;
The information processing system according to appendix D2, which includes at least one of notification information for notifying at least any crew member of the one or more vehicles, and inspection plan information regarding an inspection plan of at least any of the one or more vehicles.
(付記D4)
前記少なくとも1つのプロセッサは、
前記第2の取得処理において、前記更新後の運行計画を参照した前記運行制御処理において運行制御された前記1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を更に取得し、
前記第1の生成処理において、当該運行状況情報を少なくとも参照して、再更新後の運行計画を生成する
付記D2又はD3に記載の情報処理システム。(Appendix D4)
The at least one processor
In the second acquisition process, operation status information related to at least any operation status of the one or more vehicles whose operation is controlled in the operation control process with reference to the updated operation plan is further acquired;
The information processing system according to
(付記D5)
前記少なくとも1つのプロセッサは、
前記第1の取得処理において、前記運行計画の立案における制約条件を示す制約条件情報を更に取得し、
前記第1の生成処理において、前記制約条件情報を更に参照して前記更新後の運行計画を生成する
付記D1からD4の何れか1つに記載の情報処理システム。(Appendix D5)
The at least one processor
In the first acquisition process, constraint condition information indicating a constraint condition in creating the operation plan is further acquired,
The information processing system according to any one of appendices D1 to D4, wherein in the first generation process, the updated operation plan is generated by further referring to the constraint condition information.
(付記D6)
前記少なくとも1つのプロセッサは、
前記1又は複数の車両の少なくとも何れかの車載カメラによる第1の撮像データ、
前記1又は複数の車両の少なくとも何れかの重量データ、
前記1又は複数の車両の少なくとも何れかが停車する駅における第2の撮像データ、及び
前記1又は複数の車両の少なくとも何れかの位置データ
の少なくとも何れかを参照して、前記運行状況情報を生成する第2の生成処理を実行する付記D1からD5の何れか1つに記載の情報処理システム。(Appendix D6)
The at least one processor
First imaging data captured by at least one vehicle-mounted camera of the one or more vehicles;
Weight data of at least one of the one or more vehicles;
The information processing system according to any one of appendices D1 to D5, which executes a second generation process to generate the operation status information by referring to at least any of second imaging data at a station where at least any of the one or more vehicles stop, and at least any of position data of at least any of the one or more vehicles.
(付記D7)
前記少なくとも1つのプロセッサは、
外部のサービスに対して提供するための提供用情報を、
前記第2の生成処理において参照する前記第1の撮像データ、前記重量データ、前記第2の撮像データ、及び前記位置データ、及び
前記第1の生成処理において生成する前記更新後の運行計画
の少なくとも何れかを参照して生成する第3の生成処理を実行する付記D6に記載の情報処理システム。(Appendix D7)
The at least one processor
Information to be provided to external services,
The information processing system described in Appendix D6 executes a third generation process by referring to at least any of the first imaging data, the weight data, the second imaging data, and the position data referenced in the second generation process, and the updated operation plan generated in the first generation process.
(付記D8)
前記提供用情報には、
広告サービスにおいて参照される広告サービス用情報、
小売りサービスにおいて参照される小売りサービス用情報、
他の交通サービスにおいて参照される交通サービス用情報、及び
宿泊サービスにおいて参照される宿泊サービス用情報
の少なくとも何れかが含まれる
付記D7に記載の情報処理システム。(Appendix D8)
The information to be provided includes:
Information for advertising services referenced in advertising services;
Information for retail services referenced in retail services;
An information processing system according to appendix D7, comprising at least one of information for transportation services referenced in other transportation services, and information for accommodation services referenced in accommodation services.
(付記D9)
前記少なくとも1つのプロセッサは、前記第1の取得処理において、更新前の運行計画、運行状況情報、及び、更新後の運行計画を含む学習用データ
を更に取得し、
前記少なくとも1つのプロセッサは、前記学習用データを参照した機械学習による最適化処理によって前記学習済モデルを生成する学習処理
を更に実行する
付記D1からD8の何れか1つに記載の情報処理システム。(Appendix D9)
The at least one processor further acquires learning data including an operation plan before the update, operation status information, and an operation plan after the update in the first acquisition process;
The information processing system of any one of appendices D1 to D8, wherein the at least one processor further performs a learning process to generate the trained model by an optimization process using machine learning with reference to the training data.
〔付記事項E〕
本開示には、以下の各付記に記載の技術が含まれる。ただし、本発明は、以下の各付記に記載の技術に限定されるものではなく、請求項に示した範囲で種々の変更が可能である。[Appendix E]
This disclosure includes the techniques described in the following appendices. However, the present invention is not limited to the techniques described in the following appendices, and various modifications are possible within the scope of the claims.
(付記E1)
情報処理装置としてコンピュータを機能させるプログラムであって、
前記コンピュータに、
予め定められた軌道に沿って運行される1又は複数の車両に関する運行計画を取得する第1の取得処理と、
前記1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を取得する第2の取得処理と、
前記運行計画と前記運行状況情報とを参照し、学習済モデルを用いて更新後の運行計画を生成する第1の生成処理と
を実行させるプログラム、を記録した一時的でない記録媒体。(Appendix E1)
A program for causing a computer to function as an information processing device,
The computer includes:
A first acquisition process for acquiring an operation plan for one or more vehicles that are operated along a predetermined trajectory;
A second acquisition process of acquiring operation status information related to at least any operation status of the one or more vehicles;
A non-temporary recording medium having recorded thereon a program for executing a first generation process that refers to the operation plan and the operation status information and generates an updated operation plan using a learned model.
1、1A 情報処理システム
2、2A 情報処理装置
11 第1の取得部
12 第2の取得部
13 第1の生成部
21 出力部
22 学習部
50 運行管理装置
51 検査計画装置
52 信号
53 乗務員用端末
54 センサ
54A カメラ
54B 重量計
54C レールセンサ
55 状況把握支援装置
56 広告計画装置
57 売店計画装置
58 深夜バス運行計画装置
59 宿泊需要予測装置
SPI 提供用情報
1, 1A
Claims (12)
Translated fromJapanese前記1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を取得する第2の取得手段と、
前記運行計画と前記運行状況情報とを参照し、学習済モデルを用いて更新後の運行計画を生成する第1の生成手段と、
を備えている情報処理システム。A first acquisition means for acquiring an operation plan for one or more vehicles that are operated along a predetermined trajectory;
A second acquisition means for acquiring operation status information related to at least any operation status of the one or more vehicles;
A first generation means for generating an updated operation plan by referring to the operation plan and the operation status information and using a trained model;
An information processing system comprising:
を備えている請求項1に記載の情報処理システム。A traffic control means for performing traffic control for at least one of the one or more vehicles by referring to the updated traffic plan;
The information processing system according to claim 1 ,
前記1又は複数の車両の少なくとも何れかに関する運行制御を行うために前記運行制御手段によって参照される運行制御参照情報、
前記1又は複数の車両の少なくとも何れかの乗務員に通知するための通知情報、及び
前記1又は複数の車両の少なくとも何れかの検査計画に関する検査計画情報
の少なくとも何れかが含まれる、
請求項2に記載の情報処理システム。The updated operation plan generated by the first generation means includes:
Operation control reference information referenced by the operation control means in order to perform operation control for at least one of the one or more vehicles;
notification information for notifying at least any crew member of the one or more vehicles; and inspection plan information regarding an inspection plan of at least any of the one or more vehicles.
The information processing system according to claim 2 .
前記第1の生成手段は、当該運行状況情報を少なくとも参照して、再更新後の運行計画を生成する、
請求項2又は3に記載の情報処理システム。The second acquisition means further acquires operation status information related to an operation status of at least one of the one or more vehicles whose operation is controlled by the operation control means with reference to the updated operation plan,
The first generation means generates a re-updated operation plan by at least referring to the operation status information.
4. The information processing system according to claim 2 or 3.
前記第1の生成手段は、前記制約条件情報を更に参照して前記更新後の運行計画を生成する、
請求項1から4の何れか1項に記載の情報処理システム。The first acquisition means further acquires constraint condition information indicating constraint conditions in planning the operation plan,
The first generation means generates the updated operation plan by further referring to the constraint condition information.
5. An information processing system according to claim 1.
前記1又は複数の車両の少なくとも何れかの重量データ、
前記1又は複数の車両の少なくとも何れかが停車する駅における第2の撮像データ、及び
前記1又は複数の車両の少なくとも何れかの位置データ
の少なくとも何れかを参照して、前記運行状況情報を生成する第2の生成手段、
を備えている請求項1から5の何れか1項に記載の情報処理システム。First imaging data captured by at least one vehicle-mounted camera of the one or more vehicles;
Weight data of at least one of the one or more vehicles;
a second generating means for generating the operation status information by referring to at least one of second image data of a station where at least one of the one or more vehicles stops and at least one of position data of the one or more vehicles;
The information processing system according to any one of claims 1 to 5, further comprising:
前記第2の生成手段が参照する前記第1の撮像データ、前記重量データ、前記第2の撮像データ、及び前記位置データ、及び
前記第1の生成手段が生成する前記更新後の運行計画
の少なくとも何れかを参照して生成する第3の生成手段、
を備えている請求項6に記載の情報処理システム。Information to be provided to external services,
a third generation means for generating the updated operation plan by referring to at least any of the first imaging data, the weight data, the second imaging data, and the position data referred to by the second generation means, and the updated operation plan generated by the first generation means;
7. The information processing system according to claim 6, further comprising:
広告サービスにおいて参照される広告サービス用情報、
小売りサービスにおいて参照される小売りサービス用情報、
他の交通サービスにおいて参照される交通サービス用情報、及び
宿泊サービスにおいて参照される宿泊サービス用情報
の少なくとも何れかが含まれる、
請求項7に記載の情報処理システム。The information to be provided includes:
Information for advertising services referenced in advertising services;
Information for retail services referenced in retail services;
At least one of information for transportation services referenced in other transportation services and information for accommodation services referenced in accommodation services is included.
The information processing system according to claim 7.
当該情報処理システムは、前記学習用データを参照した機械学習による最適化処理によって前記学習済モデルを生成する学習手段、
を更に備えている請求項1から8の何れか1項に記載の情報処理システム。The first acquisition means further acquires learning data including an operation plan before the update, operation status information, and an operation plan after the update,
The information processing system includes a learning means for generating the trained model by an optimization process using machine learning with reference to the training data;
The information processing system according to claim 1 , further comprising:
前記1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を取得する第2の取得手段と、
前記運行計画と前記運行状況情報とを参照し、学習済モデルを用いて更新後の運行計画を生成する第1の生成手段と、
を備えている情報処理装置。A first acquisition means for acquiring an operation plan for one or more vehicles that are operated along a predetermined trajectory;
A second acquisition means for acquiring operation status information related to at least any operation status of the one or more vehicles;
A first generation means for generating an updated operation plan by referring to the operation plan and the operation status information and using a trained model;
An information processing device comprising:
前記少なくとも1つのプロセッサが、前記1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を取得する第2の取得処理と、
前記少なくとも1つのプロセッサが、前記運行計画と前記運行状況情報とを参照し、学習済モデルを用いて更新後の運行計画を生成する第1の生成処理と、
を含んでいる情報処理方法。A first acquisition process in which at least one processor acquires a driving plan for one or more vehicles that are driven along a predetermined trajectory;
A second acquisition process in which the at least one processor acquires operation status information related to at least any operation status of the one or more vehicles;
A first generation process in which the at least one processor refers to the operation plan and the operation status information and generates an updated operation plan using a trained model;
An information processing method comprising the steps of:
前記コンピュータを、
予め定められた軌道に沿って運行される1又は複数の車両に関する運行計画を取得する第1の取得手段と、
前記1又は複数の車両の少なくとも何れかの運行状況に関連する運行状況情報を取得する第2の取得手段と、
前記運行計画と前記運行状況情報とを参照し、学習済モデルを用いて更新後の運行計画を生成する第1の生成手段と、
として機能させるプログラム。
A program for causing a computer to function as an information processing device,
The computer,
A first acquisition means for acquiring an operation plan for one or more vehicles that are operated along a predetermined trajectory;
A second acquisition means for acquiring operation status information related to at least any operation status of the one or more vehicles;
A first generation means for generating an updated operation plan by referring to the operation plan and the operation status information and using a trained model;
A program that functions as a
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2023/044865WO2025126425A1 (en) | 2023-12-14 | 2023-12-14 | Information processing system, information processing device, information processing method, and program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2023/044865WO2025126425A1 (en) | 2023-12-14 | 2023-12-14 | Information processing system, information processing device, information processing method, and program |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2025126425A1true WO2025126425A1 (en) | 2025-06-19 |
Family
ID=96056829
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/044865PendingWO2025126425A1 (en) | 2023-12-14 | 2023-12-14 | Information processing system, information processing device, information processing method, and program |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2025126425A1 (en) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010512266A (en)* | 2006-12-07 | 2010-04-22 | ゼネラル・エレクトリック・カンパニイ | Method and apparatus for optimizing railway train operation for trains including multiple power distribution locomotives |
| JP2017091008A (en)* | 2015-11-04 | 2017-05-25 | 株式会社日立製作所 | Data processing method and data processing system |
| JP2018103924A (en)* | 2016-12-28 | 2018-07-05 | 株式会社日立製作所 | Device to predict congestion |
| WO2023286425A1 (en)* | 2021-07-13 | 2023-01-19 | 株式会社日立製作所 | Device for assisting with changing operation plan, method for assisting with changing operation plan, and train operation management system |
- 2023
- 2023-12-14WOPCT/JP2023/044865patent/WO2025126425A1/enactivePending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010512266A (en)* | 2006-12-07 | 2010-04-22 | ゼネラル・エレクトリック・カンパニイ | Method and apparatus for optimizing railway train operation for trains including multiple power distribution locomotives |
| JP2017091008A (en)* | 2015-11-04 | 2017-05-25 | 株式会社日立製作所 | Data processing method and data processing system |
| JP2018103924A (en)* | 2016-12-28 | 2018-07-05 | 株式会社日立製作所 | Device to predict congestion |
| WO2023286425A1 (en)* | 2021-07-13 | 2023-01-19 | 株式会社日立製作所 | Device for assisting with changing operation plan, method for assisting with changing operation plan, and train operation management system |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6895325B2 (en) | Traffic demand forecasting device, traffic demand forecasting method, and traffic demand forecasting program | |
| Xu et al. | Rescheduling subway trains by a discrete event model considering service balance performance | |
| JP6675860B2 (en) | Data processing method and data processing system | |
| JP7302952B2 (en) | Operation control program, operation control method and operation control device | |
| WO2015118701A1 (en) | System for generating actual predicted time of route operation, method for generating actual predicted time of route operation, and program for generating actual predicted time of route operation | |
| EP2778013B1 (en) | Information processing apparatus, communication terminal, information processing method and program | |
| JP4790637B2 (en) | Passenger guidance system | |
| US20210248290A1 (en) | Modeling, simulation, and analysis of transportation systems | |
| Dvořák et al. | Software support for railway traffic simulation under restricted conditions of the rail section | |
| JP2012073976A (en) | Information service device, information service method, and information service system | |
| US10402755B2 (en) | Transportation service information providing apparatus, and transportation service information providing method | |
| Loo et al. | Dynamics of in-station time within metro systems: Measurement and determining factors | |
| JP2020177354A (en) | Predictor, prediction system, computer program, prediction method and generation method | |
| Angadi et al. | Spatiotemporal capacity estimation of bus rapid transit system based on dwell time analysis | |
| WO2025126425A1 (en) | Information processing system, information processing device, information processing method, and program | |
| JP7425680B2 (en) | Navigation device and navigation method | |
| US20230166783A1 (en) | Modification risk output device, modification risk output method, and modification risk output program | |
| JP2021165958A (en) | Prediction device and prediction method | |
| Birol et al. | A modelling and simulation study of a metro line as a time-delayed switched system | |
| Amrani et al. | Architecture of a public transport supervision system using hybridization models based on real and predictive data | |
| Noursalehi et al. | Real-time Predictive Analytics for Improving Public Transportation Systems' Resilience | |
| Aung et al. | An efficient proposed Yangon railway system simulation module | |
| JP2025001723A (en) | Operation support device, operation support method, and program | |
| JP7732124B1 (en) | Information providing device and information providing method | |
| JP7671619B2 (en) | Calculation system and determination method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application | Ref document number:23961489 Country of ref document:EP Kind code of ref document:A1 |