WO2024021111A1 - Cleaning robot control method, and processing, generation, area division and exploration method, device and system - Google Patents
Cleaning robot control method, and processing, generation, area division and exploration method, device and systemDownload PDFInfo
- Publication number
- WO2024021111A1 WO2024021111A1PCT/CN2022/109209CN2022109209WWO2024021111A1WO 2024021111 A1WO2024021111 A1WO 2024021111A1CN 2022109209 WCN2022109209 WCN 2022109209WWO 2024021111 A1WO2024021111 A1WO 2024021111A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- cleaning
- area
- preset
- cleaning robot
- robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images














































































Classifications
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/24—Floor-sweeping machines, motor-driven
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4011—Regulation of the cleaning machine by electric means; Control systems and remote control systems therefor
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4061—Steering means; Means for avoiding obstacles; Details related to the place where the driver is accommodated
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/02—Docking stations; Docking operations
- A47L2201/024—Emptying dust or waste liquid containers
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/02—Docking stations; Docking operations
- A47L2201/028—Refurbishing floor engaging tools, e.g. cleaning of beating brushes
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/04—Automatic control of the travelling movement; Automatic obstacle detection
Definitions
- the present applicationrelates to the field of cleaning technology, and in particular to a control method, processing, generation, area division, exploration method, device, system and storage medium of a cleaning robot.
- Cleaning robotscan be used to automatically clean floors, and their application scenarios can include household indoor cleaning, large-scale place cleaning, etc.
- basic cleaning modesare generally provided, such as whole-house sweeping, whole-house mopping, etc.
- a single cleaning modeis difficult to meet user needs.
- usersoften need to manually set at least one of the following for different rooms: different cleaning modes, cleaning parameters of each room to be cleaned, cleaning frequency, etc., in order to achieve the expected cleaning effect. This type of cleaning robot is still not smart enough.
- This applicationprovides a control method, processing, generation, area division, exploration method, device, system and storage medium for a cleaning robot, aiming to solve technical problems such as the single cleaning mode of the cleaning robot being difficult to meet user needs and not intelligent enough.
- embodiments of the present applicationprovide a control method for a cleaning robot, including:
- the cleaning robotis controlled to clean at least part of the non-carpet area in the cleaning task map through at least a mopping element.
- embodiments of the present applicationprovide a control method for a cleaning robot, including:
- the cleaning robotis controlled to perform maintenance.
- embodiments of the present applicationprovide a method for controlling a cleaning robot, which is used to control the cleaning robot to clean a preset cleaning area, including:
- the cleaning robotis controlled to perform a boundary leak-filling cleaning task on the preset cleaning area.
- control devicefor a cleaning robot, where the control device includes a memory and a processor;
- the memoryis used to store computer programs
- the processoris configured to execute the computer program and when executing the computer program, implement:
- embodiments of the present applicationprovide a cleaning system, including:
- the cleaning robotincludes a walking unit, a mopping part and a brushing part, the walking unit is used to drive the cleaning robot to move, the mopping part and the brushing part are used to clean the ground;
- a base stationwhich is used at least for cleaning the mopping parts of the cleaning robot.
- embodiments of the present applicationprovide a method for processing a cleaning image of a cleaning device, which is used to generate a cleaning image after the cleaning device performs a cleaning task and completes cleaning of one or at least two preset cleaning areas with a cleaning piece, include:
- a cleaning imageis generated based on the degree of dirtiness corresponding to one or at least two preset cleaning areas.
- embodiments of the present applicationprovide a processing device for cleaning images of a cleaning device, where the processing device includes a memory and a processor;
- the memoryis used to store computer programs
- the processoris configured to execute the computer program and, when executing the computer program, implement the steps of the aforementioned method for processing an image cleaned by a cleaning device.
- embodiments of the present applicationprovide a cleaning equipment system, including:
- the cleaning equipmentincludes a movement mechanism and a cleaning piece, the movement mechanism is used to drive the cleaning equipment to move, so that the cleaning piece cleans the preset cleaning area;
- a base stationthe base station is at least used to clean the cleaning parts of the cleaning equipment.
- embodiments of the present applicationprovide a cleaning equipment system, including:
- the cleaning equipmentincludes a movement mechanism, cleaning parts and a maintenance mechanism.
- the movement mechanismis used to drive the cleaning equipment to move so that the cleaning parts clean the preset cleaning area.
- the maintenance mechanismis used to Clean the cleaning parts; and,
- embodiments of the present applicationprovide a method for generating a visual interface, including:
- a visual interfaceis generated based on the acquired execution items of all or part of the cleaning equipment, and the visual interface is used to indicate all or part of the execution items of the cleaning equipment through animation.
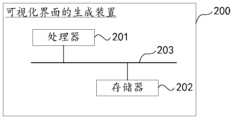
- embodiments of the present applicationprovide a device for generating a visual interface, where the processing device includes a memory and a processor;
- the memoryis used to store computer programs
- the processoris configured to execute the computer program and implement the steps of the aforementioned visual interface generation method when executing the computer program.
- embodiments of the present applicationprovide a cleaning equipment system, including:
- the cleaning equipmentincludes a movement mechanism and an actuator, the movement mechanism is used to drive the cleaning equipment to move, so that the actuator performs cleaning;
- the aforementioned generating deviceThe aforementioned generating device.
- embodiments of the present applicationprovide a cleaning area division method for a cleaning robot, including:
- the dividing line of the roomis determined so that the dividing line and the boundary of the room form at least two preset cleaning areas, each of the preset cleaning areas
- the magnitude of the workload in the regionis less than or equal to the upper limit of the workload value range, and greater than or equal to the lower limit of the workload value range; or
- the magnitude of the work load of only one of the preset cleaning areasis less than the lower limit value, and the cleaning sequence of the preset cleaning area whose magnitude value is less than the lower limit value is in the other preset cleaning areas. After cleaning the area.
- embodiments of the present applicationprovide a control method for a cleaning robot, including:
- the cleaning robotis controlled to clean the room according to the preset cleaning area.
- control devicefor a cleaning robot, where the control device includes a memory and a processor;
- the memoryis used to store computer programs
- the processoris configured to execute the computer program and implement the steps of the foregoing method when executing the computer program.
- embodiments of the present applicationprovide a cleaning system, including:
- the cleaning robotincludes a movement mechanism and cleaning parts, the movement mechanism is used to drive the cleaning robot to move, so that the cleaning parts clean the floor;
- a base stationfor at least maintaining the cleaning robot
- this applicationprovides a ground medium exploration method, including:
- the cleaning robotWhen the cleaning robot detects the preset ground medium, the cleaning robot obtains the status information of the cleaning robot, and determines the edge exploration mode according to the status information, wherein the edge exploration mode includes an inner edge exploration mode and an outer edge exploration mode. ;
- the preset ground mediumis edge-explored according to the edge-edge exploration mode to obtain the outline of the preset ground medium.
- the present applicationalso provides a cleaning robot.
- the cleaning robotincludes a processor, a memory, and a computer program stored on the memory and executable by the processor, wherein the computer program is When the processor is executed, the steps of the above ground medium exploration method are implemented.
- embodiments of the present applicationprovide a computer-readable storage medium.
- the computer-readable storage mediumstores a computer program.
- the processorcauses the processor to implement the above method. step.
- Embodiments of the present applicationprovide a control method, processing, generation, area division, exploration method, device, system and storage medium for a cleaning robot.
- the methodincludes: obtaining a cleaning task map; determining whether the cleaning task map includes a carpet area, And when the cleaning task map includes a carpet area, the cleaning robot is controlled to clean the carpet in the carpet area through a brushing component; the cleaning robot is controlled to clean at least one of the carpets in the cleaning task map through a mopping component. Clean some non-carpet areas; by automatically brushing the carpet according to the carpet area in the cleaning task map, and at least mopping the non-carpet areas, it does not require the user to set different cleaning methods for different areas, improving Improves the intelligence of cleaning robots.
- Figure 1is a schematic flowchart of a control method for a cleaning robot provided by an embodiment of the present application
- Figure 2is a schematic diagram of a cleaning system in an embodiment
- Figure 3is a schematic block diagram of a cleaning robot in an embodiment
- Figure 4is a schematic structural diagram of a cleaning robot in one embodiment
- Figure 5is a schematic structural diagram of a base station in an embodiment
- Figure 6is a schematic block diagram of a base station in an embodiment
- Figure 7is a schematic diagram of an inner edge exploration scenario provided by an embodiment of the present application.
- Figure 8is a schematic diagram of an outer edge exploration scenario provided by an embodiment of the present application.
- Figure 9is a schematic flowchart of a control method for a cleaning robot provided by an embodiment of the present application.
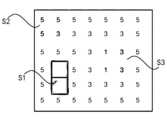
- Figure 10is a schematic diagram of workload per unit area in an embodiment
- Figure 11is a schematic flow chart of a control method in an embodiment
- Figure 12is a schematic flowchart of a control method for a cleaning robot provided by an embodiment of the present application.
- Figure 13is a schematic structural diagram of a cleaning robot in one embodiment
- Figure 14is a schematic diagram of the cleaning blind area during edge cleaning movement in one embodiment
- Figures 15 and 16are schematic diagrams of a cleaning robot performing a boundary leak-filling cleaning task in some embodiments
- Figure 17is a schematic diagram of a narrow area in an embodiment
- Figures 18 to 20are schematic diagrams of cleaning robots performing boundary leak repair cleaning tasks in other embodiments.
- Figures 21 and 22are schematic diagrams of the cleaning blind area when cleaning along the columnar body in some embodiments.
- Figure 23is a schematic diagram of the boundary leakage cleaning strategy corresponding to cleaning along the columnar body in one embodiment
- Figure 24is a schematic block diagram of a control device of a cleaning robot provided by an embodiment of the present application.
- Figure 25is a schematic flowchart of a method for processing images cleaned by a cleaning device according to an embodiment of the present application
- Figure 26is a schematic block diagram of a cleaning equipment system provided by an embodiment of the present application.
- Figure 27is a schematic block diagram of a cleaning equipment system provided by another embodiment of the present application.
- Figure 28is a schematic diagram of changes in the degree of dirtiness of the mopping parts in one embodiment
- Figure 29is a schematic diagram of the preset cleaning area and image area provided by the embodiment of the present application.
- Figure 30is a schematic diagram of a cleaning image in an embodiment
- Figure 31is a schematic diagram of a cleaning image according to an embodiment
- Figure 32is a schematic diagram of another cleaning image according to an embodiment
- Figure 33is a schematic diagram of another cleaning image according to an embodiment
- Figure 34is a schematic diagram of a cleaning image in an embodiment
- Figure 35is a schematic diagram of a cleaning image according to an embodiment
- Figure 36is a schematic diagram of another cleaning image according to an embodiment
- Figure 37is a schematic diagram of another cleaning image according to an embodiment
- Figure 38is a schematic diagram of a cleaning image in an embodiment
- Figure 39is a schematic diagram of a cleaning image in an embodiment
- Figure 40is a schematic diagram of a cleaning image according to an embodiment
- Figure 41is a schematic diagram of another cleaning image according to an embodiment
- Figure 42is a schematic diagram of another cleaning image according to an embodiment
- Figure 43is a schematic diagram of a cleaning image in an embodiment
- Figure 44is a schematic diagram of a cleaning image in an embodiment
- Figure 45is a schematic diagram of a cleaning image according to an embodiment
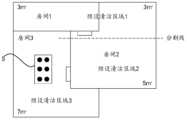
- Figure 46is a schematic diagram of a room and a room area provided by an embodiment of the present application.
- Figure 47is a schematic diagram of a room cleaning image in one embodiment
- Figure 48is a schematic diagram of a track cleaning image in an embodiment
- Figure 49is a schematic diagram of a track cleaning image in an embodiment
- Figure 50is a cleaning image related to an embodiment of the present application.
- Figure 51is a schematic block diagram of a cleaning image processing device provided by a cleaning device according to an embodiment of the present application.
- Figure 52is a schematic flowchart of a method for generating a visual interface provided by an embodiment of the present application.
- Figure 53is a schematic diagram of a visual interface in an embodiment
- Figure 54is a schematic diagram of a visual interface in an embodiment
- Figure 55is a schematic diagram of a visual interface in an embodiment
- Figure 56is a schematic diagram of a visual interface in an embodiment
- Figure 57is a schematic diagram of a visual interface in an embodiment
- Figure 58is a schematic diagram of a visual interface in an embodiment
- Figure 59is a schematic diagram of a visual interface in an embodiment
- Figure 60is a schematic flowchart of a method for generating a visual interface provided by another embodiment of the present application.
- Figure 61is a schematic diagram of a pop-up window in an embodiment
- Figure 62is a schematic diagram of a pop-up window in an embodiment
- Figure 63is a schematic diagram of a picture corresponding to the first execution item involved in an embodiment
- Figure 64is a schematic diagram of saving identification in an embodiment
- Figure 65is a schematic block diagram of a visual interface generation device provided by an embodiment of the present application.
- Figure 66is a schematic block diagram of a cleaning equipment system provided by an embodiment of the present application.
- Figure 67is a schematic flowchart of a cleaning area division method for a cleaning robot provided by an embodiment of the present application.
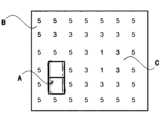
- Figure 68is a schematic diagram of a room in the cleaning task map in one embodiment
- Figure 69is a schematic diagram of the workload per unit area in an embodiment
- Figure 70is a schematic diagram of different partitioning schemes in an embodiment
- Figure 71is a schematic diagram of an obstacle-dense area in an embodiment
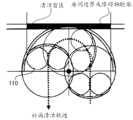
- Figure 72is a schematic diagram of the movement trajectory of the cleaning robot when there is no dense obstacle area
- Figure 73is a schematic diagram of the movement trajectory of the cleaning robot when aggregating areas with dense obstacles
- Figure 74is a schematic flowchart of a cleaning method for mopping parts provided by an embodiment of the present application.
- Figure 75is a schematic flow chart of the steps of a ground medium exploration method provided by an embodiment of the present application.
- Figure 76is a schematic diagram of a cleaning robot provided by an embodiment of the present application performing inner edge exploration and performing a first predetermined action on a preset ground medium;
- Figure 77is a schematic diagram of a scene in which a cleaning robot performs inner edge exploration on a preset ground medium according to an embodiment of the present application;
- Figure 78is a schematic structural diagram of a cleaning robot provided by an embodiment of the present application.
- Figure 79is a schematic diagram of a scene in which a cleaning robot performs outer edge exploration on a preset ground medium according to an embodiment of the present application;
- Figure 80is a schematic diagram of another scene in which a cleaning robot according to an embodiment of the present application performs outer edge exploration on a preset ground medium;
- Figure 81is a schematic diagram of a scene in which a cleaning robot determines the contour of a preset ground medium by connecting contour points according to an embodiment of the present application;
- Figure 82is a schematic diagram of a scene for fitting the contour of a preset ground medium provided by an embodiment of the present application.
- Figure 83is a schematic diagram of a scene in which a cleaning robot according to an embodiment of the present application determines the outline of a preset ground medium by performing graphic matching processing on outline points;
- Figure 84is a schematic diagram of a scene in which a cleaning robot merges adjacent media areas provided by an embodiment of the present application;
- Figure 85is a schematic diagram of the trajectory of a cleaning robot cleaning preset ground media provided by an embodiment of the present application.
- Figure 86is a schematic diagram of a cleaning robot using different trajectories to explore preset ground media provided by an embodiment of the present application;
- Figure 87is a schematic flow chart of the steps of a ground medium exploration method provided by an embodiment of the present application.
- Figure 88is a schematic structural block diagram of a cleaning robot provided by an embodiment of the present application.
- FIG. 1is a schematic flowchart of a control method for a cleaning robot provided by an embodiment of the present application.
- the control method of the cleaning robotcan be applied in a cleaning system to control the cleaning robot in the system so that the cleaning robot performs cleaning tasks and cleans the area corresponding to the cleaning task map.
- the area corresponding to the cleaning task mapcan be any area to be cleaned such as a family space, a room unit of a family space, a partial area of a room unit, a large place, or a part of a large place.
- the area corresponding to the cleaning task mapcan refer to the larger area that is cleaned for the first time, such as the entire room unit; it can also refer to the area that needs to be cleaned after the first cleaning of the larger area, such as the backrest in the room unit. Wall area, or obstacle area.
- the cleaning task mapcan be established by exploring the current space in response to mapping instructions, or it can be updated based on obstacles, carpets, etc. identified by the cleaning robot during the cleaning process; optionally, the cleaning
- the task mapmay be a map of a cleaning area specified by the user. For example, in response to the user selecting a cleaning area such as one or more rooms on the map, determining the one or more rooms as a cleaning task map, or in response to the user selecting the cleaning area on the map.
- the cleaning area circled aboveis, for example, a partial area of one or more rooms.
- the partial area of one or more roomsis determined as a cleaning task map, and is certainly not limited to this.
- the cleaning systemincludes one or more cleaning robots 100 and one or more base stations 200 .
- the base station 200is used in conjunction with the cleaning robot 100.
- the base station 200can charge the cleaning robot 100, and the base station 200 can provide a parking position for the cleaning robot 100, etc.
- the base station 200can also clean the mopping member 110 of the cleaning robot 100, where the mopping member 110 is used to mop the floor.
- the cleaning systemalso includes a control device 300.
- the control device 300can be used to implement the steps of the cleaning robot control method according to the embodiment of the present application.
- the robot controller 104 of the cleaning robot 100 and/or the base station controller 206 of the base station 200can be used as the control device 300 alone or in combination to implement the steps of the cleaning robot control method according to the embodiment of the present application; in other cases,
- the cleaning systemincludes a separate control device 300 for implementing the steps of the cleaning robot control method in the embodiment of the present application.
- the control device 300can be provided on the cleaning robot 100 or can be provided on the base station 200; of course It is not limited thereto.
- the control device 300may be a device other than the cleaning robot 100 and the base station 200, such as a home smart terminal, a master control device, etc.
- the cleaning robot 100can be used to automatically mop the floor.
- the application scenarios of the cleaning robot 100can be household indoor cleaning, large-scale place cleaning, etc.
- FIG. 3is a schematic block diagram of the cleaning robot 100 in an embodiment.
- the cleaning robot 100includes a robot body, a driving motor 102, a sensor unit 103, a robot controller 104, a battery 105, a walking unit 106, a robot memory 107, a robot communication unit 108, a robot interaction unit 109, a mopping part 110, a charging part, etc. .
- the mopping member 110is used for mopping the ground, and the number of the mopping member 110 may be one or more.
- the mopping member 110is, for example, a mop.
- the wiping member 110is disposed at the bottom of the robot body, specifically at a rear position of the bottom of the robot body.
- a driving motor 102is provided inside the robot body. Two rotating shafts extend from the bottom of the robot body, and the mopping member 110 is sleeved on the rotating shafts. The driving motor 102 can drive the rotating shaft to rotate, so that the rotating shaft drives the mopping member 110 to rotate.
- the cleaning robot 100further includes a brushing part 120 , and the brushing part 120 includes a side brushing part 121 and/or a middle sweeping part 122 .
- the cleaning robot 100is a cleaning robot that integrates sweeping and mopping.
- the brushing part 120 and the mopping part 110can work together.
- the brushing part 120 and the mopping part 110work at the same time, and the brushing part 120 and the mopping part 110 continue to work alternately, etc. ;
- the brushing and sweeping part 120 and the mopping part 110can also work separately, that is, the brushing and sweeping part 120 performs cleaning work alone, or the mopping part 110 performs mopping work alone.
- the side brushing part 121sweeps dust and other dirt from the outside to the middle area, and the middle sweeping part 122 continues to sweep the dirt in the middle area to the dust collector.
- the number of side brush members 121is not limited. As shown in Figure 4, the cleaning robot 100 has two side brush members 121 arranged on the left and right sides. Alternatively, only one side brush member 121 is arranged on the left or right side.
- the brushing and sweeping member 120can be disposed on the front side of the mopping member 110. Therefore, when the brushing and sweeping member 120 and the mopping member 110 work together, the cleaning robot 100 can perform front sweeping and rear mopping. Compared with brushing and sweeping, The member 120 is disposed behind the mopping member 110, which can prevent the brushing member 120 from being wetted by the wet area dragged by the mopping member 110, and also prevent the dirty brushing member 120 from soiling the mopped area in front.
- the walking unit 106is a component related to the movement of the cleaning robot 100 and is used to drive the cleaning robot 100 to move so that the mopping member 110 and/or the brushing member 120 mops the ground.
- the robot controller 104is disposed inside the robot body, and the robot controller 104 is used to control the cleaning robot 100 to perform specific operations.
- the robot controller 104may be, for example, a central processing unit (CPU) or a microprocessor (Microprocessor).
- the robot controller 104is electrically connected to components such as the battery 105, robot memory 107, drive motor 102, walking unit 106, sensor unit 103, and robot interaction unit 109 to control these components.
- the battery 105is provided inside the robot body, and the battery 105 is used to provide power to the cleaning robot 100 .
- the robot bodyis also provided with a charging component, which is used to obtain power from an external device to charge the battery 105 of the cleaning robot 100 .
- the robot memory 107is provided on the robot body, and a program is stored in the robot memory 107. When the program is executed by the robot controller 104, corresponding operations are implemented.
- the robot communication unit 108is provided on the robot body. The robot communication unit 108 is used to allow the cleaning robot 100 to communicate with external devices.
- the cleaning robot 100can communicate with the terminal and/or the base station 200 through the robot communication unit 108 .
- the base station 200is a cleaning device used in conjunction with the cleaning robot 100 .
- the sensor unit 103 provided on the robot bodyincludes various types of sensors, such as lidar, collision sensor, distance sensor, drop sensor, counter, and gyroscope.
- the lidaris set on the top of the robot body.
- the surrounding environment informationcan be obtained, such as the distance and angle of obstacles relative to the lidar, etc.
- camerascan also be used instead of lidar. By analyzing the obstacles in the images captured by the cameras, the distance and angle of the obstacles relative to the camera can also be obtained.
- the crash sensorincludes a crash housing and a trigger sensor. When the cleaning robot 100 collides with an obstacle through the collision housing, the collision housing moves toward the inside of the cleaning robot 100 and compresses the elastic buffer.
- the collision housingAfter the collision housing moves a certain distance into the cleaning robot 100, the collision housing contacts the trigger sensor, and the trigger sensor is triggered to generate a signal, which can be sent to the robot controller 104 in the robot body for processing. After hitting the obstacle, the cleaning robot 100 moves away from the obstacle, and under the action of the elastic buffer, the collision shell moves back to its original position.
- the distance sensorcan specifically be an infrared detection sensor, which can be used to detect the distance from the obstacle to the distance sensor.
- the distance sensoris arranged on the side of the robot body, so that the distance value from the obstacle located near the side of the cleaning robot 100 to the distance sensor can be measured by the distance sensor.
- the distance sensormay also be an ultrasonic ranging sensor, a laser ranging sensor, a depth sensor, etc.
- the drop sensoris provided at the bottom edge of the robot body. When the cleaning robot 100 moves to the edge of the ground, the drop sensor can detect that the cleaning robot 100 is at risk of falling from a high place, thereby performing corresponding anti-fall reactions, such as cleaning robot 100 stops moving, or moves away from the falling position, etc.
- the gyroscopeis used to detect the rotation angle of the cleaning robot 100, thereby determining the orientation of the cleaning robot 100.
- the robot interaction unit 109is provided on the robot body, and the user can interact with the cleaning robot 100 through the robot interaction unit 109 .
- the robot interaction unit 109includes, for example, switch buttons, speakers, microphones, touch switches/screens and other components.
- the usercan control the cleaning robot 100 to start or stop working by pressing the switch button or touch switch/screen, and can also display the working status information of the cleaning robot through the touch screen.
- the cleaning robot 100can play prompt sounds to the user through the speaker, obtain the user's control instructions through the microphone, or locate the user's location by obtaining the user's voice.
- the cleaning robot 100 described in the embodiment of the present applicationis only a specific example and does not constitute a specific limitation to the cleaning robot 100 of the embodiment of the present application.
- the cleaning robot 100 of the embodiment of the present applicationcan also be implemented in other specific ways.
- the cleaning robotmay have more or fewer components than the cleaning robot 100 shown in FIG. 1 .
- FIG. 5is a schematic three-dimensional diagram of the base station 200 in this embodiment
- FIG. 6is a schematic block diagram of the base station 200 in this embodiment.
- the base station 200is used in conjunction with the cleaning robot 100.
- the base station 200can charge the cleaning robot 100, and the base station 200 can provide a parking position for the cleaning robot 100, etc.
- the base station 200can also clean the mopping member 110 of the cleaning robot 100.
- the mopping member 110is used for mopping the ground.
- the base station 200 in this embodiment of the present applicationincludes a base station body 202, a cleaning tank 203 and a water tank (not shown).
- the cleaning tank 203is provided on the base station body 202, and the cleaning tank 203 is used to clean the mopping member 110 of the cleaning robot.
- the cleaning ribs 2031 provided on the cleaning tank 203can scrape and clean the mopping member 110 .
- the base station main body 202is provided with an inlet 205, and the inlet 205 leads to the cleaning tank 203.
- the cleaning robot 100can drive into the base station 200 through the entry slot 205, so that the cleaning robot 100 can park at a preset parking position on the base station 200.
- the water tankis provided in the base station body 202, and specifically includes a clean water tank and a sewage tank. The clean water tank is used to store clean water.
- the cleaning robot 100is parked on the base station 200 , the mopping member 110 of the cleaning robot 100 is accommodated in the cleaning tank 203 .
- the clean water tankprovides clean water to the cleaning tank 203, and the clean water is used to clean the mopping member 110.
- the base station body 202is provided with a top cover (not shown), and the user can take out the water tank from the base station body 202 by opening the top cover.
- the water tankcan be connected to a water inlet pipe (such as a tap water pipe) and a sewage pipe (such as a drainage pipe), in which case the water tank can be fixed in the base station body 202; in other embodiments, the base station 200
- a water inlet pipesuch as a tap water pipe
- a sewage pipesuch as a drainage pipe
- the water tankcan be fixed in the base station body 202
- the base station 200One or both of the clean water tank and the sewage tank may not be provided.
- the water inlet pipemay directly provide clean water to the cleaning tank 203, and the dirty sewage after cleaning the mop member 110 may also be directly discharged from the sewage pipe.
- the base station 200further includes a dirt detection device 210 .
- the dirt detection device 210is used to detect the degree of dirt of the mop element 110 .
- the dirt detection device 210includes at least one of the following: a visual sensor and a sewage detection sensor.
- the image or color information of the mop element 110can be obtained according to the visual sensor.
- the informationdetermines the degree of dirtiness of the mopping element 110. For example, the darker the grayscale of the surface of the mopping element 110, the greater the degree of dirtiness of the mopping element.
- the sewage detection sensorcan obtain the detection information of the sewage obtained by cleaning the mopping member 110, and the degree of dirtiness of the mopping member 110 can be determined based on the obtained detection information; optionally, the sewage detection sensor includes at least the following: One: visible light detection sensor, infrared detection sensor, total dissolved solids detection sensor; for example, the infrared detection sensor collects turbidity information of sewage, the visible light detection sensor collects chromaticity information of sewage, and the total dissolved solids detection sensor Collect water conductivity information of sewage; the degree of dirtiness of the mop parts can be determined based on one or more of the turbidity information, chromaticity information, and water conductivity information; for example, the greater the turbidity of the sewage, the higher the water conductivity The larger it is, the greater the dirtiness of the mopping parts.
- the base station 200may also include a base station controller 206, a base station communication unit 207, a base station memory 208, a water pump 209, a base station interaction unit 220, and the like.
- the base station controller 206is provided inside the base station main body 202, and the base station controller 206 is used to control the base station 200 to perform specific operations.
- the base station controller 206may be, for example, a central processing unit (Central Processing Unit, CPU) or a microprocessor (Microprocessor). Among them, the base station controller 206 is electrically connected to the base station communication unit 207, the base station memory 208, the water pump 209 and the base station interaction unit 220.
- CPUCentral Processing Unit
- MicroprocessorMicroprocessor
- the base station memory 208is provided on the base station main body 202.
- the base station memory 208stores programs, which implement corresponding operations when executed by the base station controller 206.
- Base station memory 208is also used to store parameters for use by base station 200.
- the base station memory 208includes but is not limited to disk memory, CD-ROM, optical memory, etc.
- the water pump 209is provided inside the base station body 202.
- One water pump 209is used to control the clean water tank to provide clean water to the cleaning tank 203, and the other water pump 209 is used to clean the dirty water behind the mop 110. Sewage is collected into the sewage tank.
- the water inlet pipedirectly provides cleaning water to the cleaning tank 203, and the cleaning water can be provided to the cleaning tank 203 by controlling the solenoid valve on the water inlet pipe.
- the base station communication unit 207is provided on the base station body 202 and is used to communicate with external devices, such as connecting to a WI-FI router to communicate with a terminal, or communicating with the cleaning robot 100 .
- the base station interaction unit 220is used to interact with users.
- the base station interaction unit 220includes, for example, a display screen and control buttons.
- the display screen and control buttonsare provided on the base station body 202.
- the display screenis used to display information to the user, and the control buttons are used for the user to press to control the startup or operation of the base station 200. Downtime etc.
- the base station body 202is also provided with a power supply component, and the cleaning robot is provided with a charging component.
- the charging component of the cleaning robot 100comes into contact with the power supply component of the base station 200, thereby The base station 200 charges the cleaning robot 100 .
- the electric energy of the base station 200may come from commercial power.
- the cleaning robot 100cleans the floor of the room.
- the cleaning robot 100automatically drives to the base station 200 .
- the cleaning robot 100enters the base station 200 through the entry slot 205 on the base station 200 and stops at a preset parking position on the base station 200 .
- the charging component on the cleaning robot 100is electrically connected to the power supply component on the base station 200.
- the base station 200obtains power from the commercial power and charges the battery 105 of the cleaning robot 100 through the power supply component and the charging component. After the cleaning robot 100 completes charging as needed, it drives away from the base station 200 and continues to clean the room floor.
- the cleaning robot 100can be used to mop the floor.
- the cleaning robot 100mops the room floor for a period of time.
- the cleaning robot 100drives to the base station 200 .
- the cleaning robot 100enters the base station 200 through the entry slot 205 on the base station 200 and stops at a preset parking position on the base station 200 .
- the mopping part 110 of the cleaning robot 100is accommodated in the cleaning tank 203.
- the cleaning water in the clean water tank in the base station 200flows to the cleaning tank 203, and is lubricated through the liquid inlet structure on the cleaning tank 203.
- the wet mopping member 110is scraped against the protruding cleaning ribs 2031 in the cleaning tank at the same time, thereby cleaning the mopping member 110 .
- the dirty sewage after cleaning the mopping part 110flows out of the cleaning tank 203 from the drainage structure on the cleaning tank. Under the action of the water pump 209, the dirty sewage is collected into the sewage tank.
- the aforementioned base station 200is only a specific example and does not constitute a specific limitation to the base station in the embodiment of the present application.
- the base station in the embodiment of the present applicationmay also be implemented in other specific ways.
- the base station in the embodiment of the present applicationmay not include The water tank and the main body of the base station can be connected to the tap water pipe and the drain pipe, so that the tap water from the tap water pipe is used to clean the mopping part 110 of the cleaning robot 100.
- the dirty sewage after cleaning the mopping part 110flows out of the base station 200 through the cleaning tank 203 through the drainage pipe.
- the base stationmay have more or fewer components than the base station 200 shown in FIG. 5 .
- control method of a cleaning robotincludes steps S110 to S130.
- the cleaning task mapis used to represent the area to be cleaned or the sub-area to be cleaned within the area to be cleaned, and the sub-area to be cleaned is the uncleaned area within the area to be cleaned.
- the area to be cleanedcan be any area to be cleaned such as a family space, a room unit of a family space, a part of a room unit, a large place or a part of a large place.
- the sub-area to be cleanedmay be an area after the cleaning robot performs edge cleaning in the area to be cleaned.
- a pre-stored cleaning task mapcan be obtained, for example, the cleaning task map is pre-stored in the cleaning robot, base station, user terminal or server; or the cleaning task map can be obtained after the cleaning robot detects the area to be cleaned, for example, through lidar One or more sensors among the visual sensor, the inertial measurement unit and the collision sensor detect the area to be cleaned; or the cleaning task map can be obtained when the area to be cleaned is cleaned, for example, the cleaning task map is obtained by cleaning the area to be cleaned along the edge. , for example, clean the edge of the area to be cleaned, and obtain a cleaning task map based on the cleaning trajectory of the edge part.
- the cleaning robotWhen the area to be cleaned is a home space, and the home space includes multiple room units, the cleaning robot will The edge of each room unit in the space to be cleaned is cleaned; or the map input by the user through the terminal can be obtained from the user terminal.
- the cleaning task mapcan be obtained through any one or more of the above methods.
- the acquired cleaning task mapcan be integrated and corrected through any method.
- the cleaning robotnormally completes several (at least once) room cleaning tasks. During this period, the cleaning robot can complete the creation of the map, divide and process the rooms, and obtain the floor material information of each room, such as the user The material information of each room can be set through the APP.
- the cleaning robotwhen the cleaning robot completes the cleaning of the whole house, it can complete the information of the current map during the cleaning process, such as the number and area of the current carpet, and the carpet area corresponding to the carpet can be marked on the map.
- steps of map data analysismay be performed.
- the area to be cleaned based on the cleaning task mapmay be called a preset cleaning area.
- a roommay be a preset cleaning area, or a room may have multiple preset cleaning areas; of course, it is not limited thereto.
- a preset cleaning areaincludes one room and at least part of another room.
- the preset cleaning areacan be divided and determined based on the user's operation on the cleaning task map, or based on preset area dividing rules.
- the graphical characteristics of all current roomsare analyzed, such as length, width and area, the number and area of carpets in the room, the size and distribution of obstacles, and based on the graphical characteristics of the room.
- Featuresmerge, split and sort areas to delineate areas to be cleaned, or can be called preset cleaning areas.
- statistical analysis of historical cleaning parametersmay be performed. For example, the time records of recent room cleaning can be counted to adjust the cleaning parameters according to the frequency of cleaning, including but not limited to the ground pressure of the mopping parts, humidity, type and amount of cleaning fluid, etc.; or the cleaning parameters of recent room cleaning can also be counted. settings to estimate the current degree of room dirtiness to facilitate subsequent dynamic adjustment of cleaning parameters.
- the hosting modecan be started based on user operations.
- the usercan trigger the hosting mode through a human-computer interaction unit such as a base station, cleaning robot, user terminal, smart speaker, etc., including but not limited to triggering by key presses, voice, etc. .
- the userwhen initiating the hosting mode, the user may be notified through the human-computer interaction unit.
- the hosting modecan be started when the user needs sweeping and mopping and carpet cleaning.
- initiating the hosting mode based on user operationsmay also be referred to as the user's one-click management cleaning mode.
- the cleaning robotcan at least automatically clean the carpet in the carpet area by brushing and sweeping, and by mopping.
- the wipercleans at least part of the non-carpet areas in the cleaning task map; there is no need to repeatedly set the cleaning mode based on room conditions. For example, by obtaining the user's daily cleaning habits, the best cleaning strategy that the current cleaning robot should implement is given to achieve better cleaning effects, higher cleaning efficiency, or to balance cleaning efficiency and cleaning effects; users With fewer operations, the robot's cleaning scheduling logic is more in line with user expectations, and the overall cleaning effect is better.
- the cleaning robotcan autonomously determine carpet cleaning decisions (including whether to clean the carpet, when to clean, etc.) and its execution strategy; the cleaning robot can determine the cleaning robot control based on historical cleaning data during sweeping and mopping.
- Strategya strategy for residue re-sweeping; the cleaning robot can determine the path planning strategy and the soil re-mopping area selection strategy, such as the path selection strategy to prevent pollution and the sequential processing of soil re-mopping, such as based on real-time soil map Area selection, area selection based on room setting information, and re-mopping area selection based on historical cleaning frequency; the cleaning robot can also process cleaning reports after completing dirty re-mopping.
- the cleaning robotcan judge whether to perform a carpet cleaning first based on whether there is a carpet in the area to be cleaned; it can judge whether to perform edge leak repair in this cleaning based on the length of time since the last edge leak repair, and can calculate the time based on the time.
- the userwhen the hosting mode is started, the user can be informed through the human-computer interaction unit that the cleaning robot will first perform a carpet cleaning task, and then perform a simultaneous sweeping and mopping task; or it can also perform a simultaneous sweeping and mopping task first, and then perform a carpet cleaning task. Cleaning tasks.
- the carpet areais not limited to areas including carpets.
- itmay also include areas such as floor mats, mats, or other areas that are not suitable or set by the user and do not allow wet mopping.
- the carpet areamay be called a carpet area, and the carpet includes carpets, foot mats, children's climbing mats, and mats laid on the ground.
- the carpetmay also be used for other cleaning robots that need to be cleaned when they encounter it. Specially processed media laid on the ground are not restricted here.
- the carpet areais mainly used as the area where carpets/floor mats are laid.
- the cleaning robotBy controlling the cleaning robot to clean the carpet/floor mat in the carpet area through the brushing member, it is possible to prevent the mopping member from wetting the carpet and the wet carpet from being contaminated with dirt and breeding bacteria.
- the cleaning robotBy automatically determining whether the cleaning task map includes a carpet area, and only cleaning the carpet in the carpet area by brushing when the cleaning task map includes a carpet area, the cleaning robot is more intelligent and the user does not need to focus on the carpet separately. Area sets the working mode of the cleaning robot.
- controlling the cleaning robot to clean the carpet in the carpet area through a brushing elementincludes: controlling the cleaning robot to move to the carpet area; and after moving to the carpet area Clean the carpet in said carpeted area.
- controlling the cleaning robot to move to the carpet areaincludes: controlling the mopping member to be in a raised position when the cleaning robot reaches the edge of the carpet area; controlling the operation of the cleaning robot A walking unit, so that the robot can move above the carpet driven by the walking unit.
- the mopping memberis controlled to be in a raised position, so that the cleaning robot moves to the top of the carpet with the mopping member lifted, which can prevent the mopping member from getting wet. carpet.
- the cleaning robotwhen the cleaning robot detects the carpet through the sensor unit, it can be determined that the cleaning robot has reached the edge of the carpet area; for example, based on the current detection data of sensors such as collision sensors and/or ultrasonic sensors, including preset features, It can be determined that the cleaning robot reaches the edge of the carpet area; the preset characteristics can be determined based on detection data of sensors such as collision sensors and/or ultrasonic sensors when the cleaning robot is at the edge of the carpet area. For example, it is determined that the cleaning robot has reached the edge of the carpet area when the visual sensor detects that the distance to the edge of the carpet area is less than or equal to a predetermined distance.
- whether the cleaning robot reaches the edge of the carpet areacan be determined based on the current position of the cleaning robot and the boundary of the carpet area in the cleaning task map.
- itis not limited to this.
- itcan be determined based on the detection data of the sensor unit whether it has reached the edge of the carpet area.
- the brush member 120includes a side brush member 121 .
- the side brush member 121includes one or more bundles of bristles. When the side brush member 121 rotates, the bristles sweep dust and other dirt from the outside of the cleaning robot 100 . to the middle area.
- the side brush member 121includes two bundles of bristles, and the angle between the two bundles of bristles is greater than 0 degrees and less than 180 degrees. When the side brush member 121 rotates to a preset angle, the bristles of the side brush member 121 all extend toward The interior of the cleaning robot 100 , in other words, the bristles of the side brush member 121 extend toward the interior of the cleaning robot 100 .
- controlling the cleaning robot to move to the carpet areaincludes: controlling the side brush to be in a retracted position when the cleaning robot reaches the edge of the carpet area, so that the side brush The bristles of the piece extend into the interior of the cleaning robot.
- the side brushis controlled to be in the retracted position, and the bristles of the side brush extend toward the inside of the cleaning robot.
- the bristlesextend toward Cleaning the inside of the robot without the bristles extending toward the carpet can prevent the bristles from contacting the edge of the carpet when moving upwards, causing the bristles to deform and bifurcate, thereby extending the service life of the side brush.
- controlling the cleaning robot to move to the carpet areaincludes: controlling the side brush to be in a free-rotating state when the cleaning robot reaches the edge of the carpet area.
- the side brushis in a free-rotating state.
- the drive motor of the side brushcan be cut off or the drive motor of the side brush can be decoupled.
- the side brushcan rotate freely following the resistance; the cleaning robot can rotate freely when the side brush is in the state.
- the free-rotating state and when moving above the carpeteven if the bristles of the side brush extend toward the carpet, when the bristles are deformed to a certain extent, they can freely rotate out of contact with the carpet and restore their original shape, which can prevent the brush from moving toward the carpet.
- the bristlescontact the edge of the carpet, causing the bristles to deform and bifurcate, thereby extending the service life of the side brush.
- controlling the cleaning robot to move to the carpet areaincludes: controlling the side brush to be in a raised position when the cleaning robot reaches the edge of the carpet area.
- the cleaning robotmoves above the carpet when the side brush is in the raised position, which can prevent the bristles of the side brush from contacting the edge of the carpet and cause the bristles to deform and bifurcate, thereby extending the service life of the side brush.
- the cleaning robotwhen the cleaning robot reaches the edge of the carpet area, the cleaning robot is controlled to stop moving, and the mopping member is controlled to be in a raised position, and the side brush member is controlled to be in a retracted position, in a freely rotating state, or in a state of free rotation.
- control the cleaning robotAfter lifting the position, control the cleaning robot to move above the carpet; this can prevent the mopping part and the side brush part from going up on the carpet without switching to the corresponding state.
- controlling the cleaning robot to clean the carpet in the carpet area through a brushing elementincludes: when the cleaning robot reaches the edge of the carpet area, controlling the cleaning robot to clean the carpet area.
- the carpetis explored along the edge to obtain the outline of the carpet; according to the outline of the carpet, the cleaning robot is controlled to clean the carpet through the brushing member in a first arcuate path; according to the outline of the carpet , controlling the cleaning robot to clean the carpet in a second arcuate path through the brushing member, wherein the second arcuate path is orthogonal to the first arcuate path.
- the edge-edge explorationis inner edge-edge exploration or outer edge-edge exploration.
- controlling the cleaning robot to explore the carpet along the edgeincludes: controlling the cleaning robot to explore the inside of the carpet along the edge. That is, the inner edge exploration mode is used to perform edge exploration on the carpet.
- controlling the cleaning robot to explore the carpet along the edgeincludes: controlling the cleaning robot to explore the outer edge of the carpet. That is, the outer edge exploration mode is used to perform edge exploration on the carpet.
- the outer edge exploration modemeans that the cleaning robot performs edge exploration on the outside of the carpet.
- the orthographic projection of the geometric center of the cleaning robotdoes not fall into the orthographic projection of the carpet.
- the inner edge exploration modemeans that the cleaning robot explores the carpet edge on the inside of the carpet, and the cleaning robot moves on the inside of the carpet.
- the trajectory formed by the orthographic projection of the geometric center of the cleaning robotat least partially coincides with the orthographic projection of the carpet.
- the cleaning robotis in the outer edge exploration mode.
- the overlap between the robot's orthographic projection and the carpet's orthographic projectionis less than 50% of the robot's orthographic projection, thereby reducing drag.
- the extent to which the wiper wets or soils the carpet area; the cleaning robotis in the inner edge exploration mode.
- edge explorationis performed on the inside of the carpet, the overlap between the orthographic projection of the cleaning robot and the orthographic projection of the carpet is greater than or equal to the percentage of the orthographic projection of the robot. Fifty.
- the integrity of the carpet contour determined by the cleaning robot after exploring the carpet using the inner edge exploration modeis higher. For example, if there are obstacles placed around the carpet, and the cleaning robot uses the outer edge exploration mode to explore the carpet, the obstacles may hinder the cleaning robot's exploration behavior, making it impossible to obtain the complete outline of the carpet.
- the edge exploration modeis the outer edge exploration mode
- the cleaning robotexplores the outer edge of the carpet, which can reduce the degree to which the mopping element wets or stains the carpet. For example, if the cleaning robot is in mopping mode, and if the cleaning robot adopts the inner edge exploration mode when detecting the carpet, it will wet a large area or even contaminate the carpet.
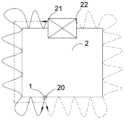
- FIG. 7is a schematic diagram of a scene in which a cleaning robot 100 performs inner edge exploration mode exploration on the carpet 2 according to an embodiment of the present application.
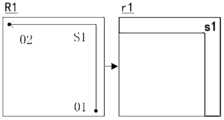
- the cleaning robot 100when the cleaning robot 100 enters the carpet area from a non-carpet area, when the cleaning robot 100 detects the carpet 2 for the first time, the cleaning robot 100 is controlled to perform an inner edge exploration task to obtain The contour point of the carpet 2 until the cleaning robot 100 reaches the first contour point 20 position again.
- the first contour point 20 positionis the position where the cleaning robot 100 obtains the first contour point. It can be understood that when the cleaning robot 100 reaches the first contour point position again, it means that the cleaning robot has returned to the position where the first contour point 20 was detected, and the exploration path of the carpet has formed a closed loop, that is, the cleaning robot has completed the exploration of the carpet.
- the cleaning robot 100when the cleaning robot 100 reaches the first contour point 20 again, it is not limited to the cleaning robot 100 necessarily returning to a position coinciding with the first contour point 20.
- the distance between the cleaning robot 100 and the first contour point 20is less than a predetermined
- a distance thresholdit can also be determined that the cleaning robot 100 reaches the first contour point 20 again.
- the coordinates of the cleaning robotmay be determined by the coordinates of the sensor that detects the carpet.
- FIG. 8is a schematic diagram of a scene in which a cleaning robot 100 according to an embodiment of the present application performs an outer edge exploration mode on the carpet 2 .
- the cleaning robot 100detects the carpet for the first time, and the current position of the cleaning robot 100 is recorded as the first contour point 20 . If there are no obstacles on the edge of the carpet 2 area, the cleaning robot 100 can return to the first contour point 20 by moving around the edge of the carpet area, or when the distance between the cleaning robot 100 and the first contour point 20 is less than the preset distance valve When the value is reached, the exploration task is completed.
- the cleaning task mapincludes a carpet area, for example, it is first determined whether the room that currently needs to be cleaned has a carpet; if there is a carpet, the distance between the carpet and the cleaning robot can be determined by The near-to-far rule controls the cleaning robot to clean multiple carpets; if there is no carpet, it will not clean the carpet.
- the cleaning robotwhen no carpet is detected in the carpet area, such as when the carpet is removed, the cleaning robot can be controlled to detect the carpet within a preset range of the carpet area (such as 1 square meter); when a carpet is detected in the preset range When arriving at the carpet, the cleaning robot can be controlled to explore the carpet along the edge to obtain the outline of the carpet, clean the carpet according to the outline of the carpet, and can also update the carpet according to the outline of the carpet.
- the carpet area in the cleaning task map; when no carpet is detected in the preset range, the carpet areacan be removed from the cleaning task map.
- the cleaning robotdetects a carpet, such as a newly added carpet or a transferred carpet, and can explore the detected carpet along its edges to obtain the outline of the carpet, and according to the The carpet is cleaned according to the outline of the carpet, and the carpet area in the cleaning task map can also be updated according to the outline of the carpet.
- a carpetsuch as a newly added carpet or a transferred carpet
- controlling the cleaning robot to clean the carpet in the carpet area through a brushing elementincludes: controlling the cleaning robot to operate the side brushing element and operating a walking unit to clean the carpet in the carpet area.
- the walking unitis driven to move on the carpet.
- the cleaning robotWhen the cleaning robot is cleaning on the carpet, it moves on the carpet driven by the walking unit, for example, moves on the carpet in an arcuate path, and at the same time runs the side brush to remove dust and other dirt on the carpet. Sweep from the outside of the cleaning robot to the middle area.
- the brushing and sweeping partsinclude a middle sweeping part
- controlling the cleaning robot to clean the carpet in the carpet area through the brushing and sweeping partsincludes: controlling the cleaning robot to run the middle sweeping part. , and operate the walking unit to move on the carpet driven by the walking unit.
- the middle sweepcan be controlled to sweep the dirt in the middle area to the vacuum device of the cleaning robot or the middle sweep is controlled.
- the dirt in the middle areais raised, and the vacuum device is controlled to collect the dirt through negative pressure.
- the fan speed of the vacuum cleaneris increased to a strong level, such as the maximum level, to improve the cleaning effect on the carpet.
- the driving speed of the cleaning robot when moving on the carpet to clean the carpetis smaller than the driving speed of the cleaning robot moving toward the carpet, so as to improve the cleaning effect on the carpet.
- the cleaning robotwhen the side brush triggers overcurrent protection, the cleaning robot is controlled to switch the side brush to a free-rotating state.
- the drive motor of the side brushrotates at a preset speed.
- the current of the drive motor of the side brushexceeds the preset speed.
- the middle sweeping piece or the walking unitwhen the middle sweeping piece or the walking unit is entangled with fluff or hair on the carpet, or when overcurrent protection is triggered for other reasons, the middle sweeping piece or the walking unit can be controlled to stop running. Start running after the preset time.
- the cleaning robotwhen the number of times the scanned object or the walking unit triggers overcurrent protection exceeds the first threshold, or the number of times the walking unit slips exceeds the second threshold, the cleaning robot is controlled to perform at least the following: One operation: stop cleaning the carpet, mark the carpet area as a prohibited area, and provide an exception prompt. For example, when the number of times the overcurrent protection is triggered by the scanned object or the walking unit exceeds the first threshold, or the number of times the walking unit slips exceeds the second threshold, it can be determined that the cleaning robot is not suitable for cleaning the carpet.
- Cleaningsuch as the pile of the carpet is too long or the hair is too much; you can stop cleaning the carpet and mark the carpet area as a prohibited area; when the carpet area is marked as a prohibited area, you can do it in subsequent cleaning tasks
- the carpet areawill not be cleaned; an exception prompt can also be provided, and the user can check the carpet according to the exception prompt; the carpet area can also be marked as a prohibited area through manual settings, for example, after removing the hair on the carpet, all Mark the prohibited area so that the cleaning robot can clean the carpet in that carpet area.
- the embodiment of the present applicationdoes not limit the order of the step of cleaning the carpet in step S120 and the step of cleaning the non-carpet area in step S130.
- the carpetcan be cleaned first and then the non-carpet area, or the non-carpet area can be cleaned first.
- the non-carpet areais then cleaned, or the non-carpet area can be cleaned after cleaning several carpets, and then the other carpets can be cleaned.
- non-carpet areasare cleaned before carpets.
- the non-carpet areasare first brushed and swept at the same time according to the cleaning order of the non-carpet areas, that is, sweeping and mopping at the same time.
- the outside of the carpetcan be Exploring the edges of the carpet to determine the outline of the carpet, and then continuing to clean the non-carpet areas; after cleaning all the non-carpet areas, perform maintenance on the mop parts, such as cleaning the mop parts and drying them, and then follow the instructions Carpet Area Cleaning Sequence Carpet Cleaning. Clean the carpet after the mop is dry to avoid wetting the carpet.
- the non-carpet areais the majority of the areas that the cleaning robot needs to clean, is the non-carpet area the main area or the area where the dirt is easier to identify with the naked eye?
- the fan powerneeds to be increased to clean the carpet. , consumes a lot of power, is limited by the battery life of the cleaning robot, and affects the cleaning of non-carpet areas; for example, it may cause the cleaning robot to stop cleaning the non-carpet areas before the carpet is cleaned, or even before cleaning the non-carpet areas. It requires charging and maintenance, which makes users feel that the cleaning robot has stopped working before the main work is completed. This does not meet user expectations and the user experience is not good.
- the cleaning task mapincludes multiple carpets
- all the carpetsare cleaned first, and then the non-carpet areas are cleaned; compared to cleaning the non-carpet areas first and then maintaining the mopping parts Cleaning the carpet later can reduce the workload of maintaining the mop parts during the cleaning process, such as drying the mop parts. For example, clean the carpet while the mop is dry to prevent wetting the carpet.
- carpet cleaningcan be turned off or carpet cleaning can be set in the carpet cleaning options. If it is set to turn off carpet cleaning, the cleaning robot is not allowed to go on the carpet during the cleaning task; for example, when the cleaning robot reaches the edge of the carpet area, it will explore the carpet along the outside of the carpet to obtain the outline of the carpet, and then Clean the area beyond the carpet. If it is set to turn on carpet cleaning, after cleaning the carpet in the carpet area, you can perform carpet avoidance actions, such as bypassing the carpet, when cleaning at least part of the non-carpet area in the cleaning task map. .
- controlling the cleaning robot to clean non-carpet areas in the cleaning task map at least through mopping elementsincludes: wetting the mopping elements; controlling movement of the cleaning robot to the non-carpet area; control the cleaning robot to clean the non-carpet area through the brushing member and the mopping member.
- the cleaning robotis controlled to move to the base station, and the base station is controlled to wet the mopping member.
- the mopping membercan also be cleaned to moisten the mopping member; of course, it is not limited to this.
- the cleaning robotis provided with a water tank, and the water in the water tank can be supplied to the mopping member to moisten the mopping member.
- the non-carpet areais cleaned by the brushing part and the mopping part, that is, the non-carpet area is brushed and mopped at the same time, that is, the cleaning robot is controlled to perform simultaneous sweeping and mopping tasks.
- the contamination of the carpetcan be reduced to a greater extent, for example, it can prevent the adsorption of dirt.
- the wet mopwill contaminate the carpet when cleaning it.
- the mopping parameters when cleaning the non-carpet areacan be determined according to the ground material of the non-carpet area; and the mopping member can be moistened or cleaned according to the mopping parameters.
- the humidity of the mopping memberis adjusted; and/or according to the mopping parameters, when the non-carpet area is cleaned, the cleaning robot is controlled to adjust the mopping member. of ground pressure.
- the ground pressure of the mopping membercan be adjusted by adjusting the height at which the mopping member is lowered relative to the robot body.
- the ground pressureis 12 N (N), and the humidity of the mopping parts is normal or relatively wet; for wooden floors, the ground pressure is 5 N (N), and the humidity of the mopping parts is Drier.
- the ground pressureis 12 N, and the humidity of the mop parts is normal.
- the cleaning task mapincludes floor material information of at least one area, such as wooden floor, tile floor, etc.
- the ground material information input by the usercan be obtained through the map management interface, such as the ground material of each room; or the ground material information can be obtained when the cleaning robot explores and draws the map on the ground; for example, the ground can be photographed through a visual sensor Image, identify the ground material based on the characteristics of the ground image.
- the dragging parameters corresponding to different ground materialscan be preset, or can be set by the user; for example, when the user clicks on an area of a certain ground material, the dragging parameters corresponding to the ground material are displayed, and the user can adjust the displayed dragging parameters. Erase parameters to modify.
- the mopping parameters set in the cleaning taskcan prevail.
- controlling the cleaning robot to clean non-carpet areas in the cleaning task map at least through a mopping elementfurther includes: when the non-carpet area includes a target area, when the mopping member After the wiping member is cleaned, the cleaning robot is controlled to move to the target area, and the target area is mopped by the mopping member.
- the target areais an area that needs to be repeatedly mopped.
- the base stationcleans the mopping parts or the cleaning robot autonomously cleans the mopping parts.
- the target areaAfter sweeping and mopping the floor, if there are at least some areas on the floor, that is, the target area has not been cleaned yet and needs to be mopped again, the target area can be mopped by the mopping member; Larger dirt has been cleaned by then. At this time, you can only mop the target area to reduce energy consumption.
- the brushing elementincludes a middle sweeping element, and when the cleaning robot is controlled to move to the target area, both the middle sweeping element and the mopping element are controlled to be in a raised position; preventing cleaning Clean mopping elements become contaminated when passing over unmopped floors or floors that have not been mopped clean, and/or prevent the loss of water on wet mopping elements and reduce the cleaning effect on the target area.
- the movement trajectory of the cleaning robotis the same as the movement trajectory before leaving the target area, and the movement trajectory is modified by the dragging member. Drag and wipe. It should be noted that the same includes exactly the same or substantially the same. For example, after the cleaning robot leaves the target area after repeatedly mopping the target area, the dirt on the mopping member has the opportunity to cause contamination on the ground that has been mopped clean on the movement path; by cleaning the mopping member Then the ground along the movement path is mopped, so that the mopped ground can be kept clean.
- controlling the cleaning robot to clean non-carpet areas in the cleaning task map at least through mopping elementsincludes: cleaning the non-carpet areas in an arcuate trajectory.
- the side brush on one sideworks to sweep the dirt from the unmoved area to the middle area, and the middle sweep continues to sweep the dirt from the middle area to the vacuum device.
- the carpetmay be detected when cleaning the non-carpet area, for example, through a sensor unit.
- the carpetis explored along the edge, the carpet area corresponding to the carpet is determined, and the carpet area is updated into the cleaning task map.
- the cleaning robotcan be controlled to clean the carpet in the carpet area by brushing immediately; or the cleaning robot can be controlled to clean the carpet in the carpet area by brushing after cleaning the non-carpet area.
- the componentcleans the carpets in the carpet area, that is, non-carpet areas can be cleaned first, ensuring a user-friendly experience.
- step of cleaning the carpet in the carpet areareference can be made to the description of the aforementioned step S120 and will not be described again here.
- control methodfurther includes: controlling the cleaning robot to lift the mopping member when a first preset condition is met; controlling the cleaning robot to lift the mopping member when a second preset condition is met.
- the brushing and sweeping partsafter controlling the cleaning robot to lift the brushing and sweeping parts and/or the mopping parts, when controlling the cleaning robot to lift the brushing and sweeping parts and/or the mopping parts location for cleaning.
- the dirt on the brushing and/or mopping partsmay fall to the ground.
- Cleaningcan reduce or eliminate contamination of the location.
- the first preset conditionincludes at least one of the following: determining that the cleaning robot is performing a navigation task, determining that the robot performs a crossing action, determining that the cleaning robot is on the carpet, determining that the cleaning robot enters the base station ;
- the second preset conditionincludes at least one of the following: determining that the cleaning robot is performing a navigation task, or determining that the cleaning robot has entered the base station.
- the cleaning robotwhen the cleaning robot ends cleaning a non-carpet area with the mopping member and starts moving toward the base station, when the cleaning robot ends cleaning a non-carpet area with the mopping member and starts moving toward another non-carpet area, the cleaning robot When starting to cross the carpet, and/or when the cleaning robot enters the base station, the cleaning robot is controlled to lift the mopping member. For example, when the cleaning robot ends cleaning a non-carpet area through the brushing and mopping elements and starts to move toward the base station, the cleaning robot ends cleaning a non-carpet area through the brushing and mopping elements and starts to move toward another non-carpet area. When the carpet area moves and/or when the cleaning robot enters the base station, the cleaning robot is controlled to lift the sweeping piece.
- the action status of the actuatorssuch as the brushing part and/or the mopping part can be judged based on the current cleaning object of the cleaning robot, the movement trajectory and other information. For example, to determine which parts should be moved and which ones should not be moved, the corresponding The actuator can achieve at least one of the following effects: improving the cleaning intelligence of the cleaning robot, improving cleaning efficiency, preventing contamination of the ground, preventing contamination of the cleaned mopping parts, and increasing the service life of the mopping parts. Of course, it is not limited to this.
- controlling the cleaning robot to clean the position of the brushing member and/or the mopping member when it is liftedincludes: controlling the cleaning robot to retreat a preset distance, rotate, and raise the suction level.
- the power or rotation speed of the fan in the dust deviceis used to absorb the dirt dropped when the brushing member and/or the mopping member is lifted. For example, when the robot returns to the base station after sweeping and mopping, a small amount of residue will fall from the brushing and/or mopping parts to the ground. You can control the cleaning robot to take a half step back and rotate on its own, and continue to turn on the The fan cleans up the dirt falling on the ground.
- the control method of a cleaning robotincludes: obtaining a cleaning task map; determining whether the cleaning task map includes a carpet area, and when the cleaning task map includes a carpet area, controlling the cleaning robot to sweep through cleaning the carpet in the carpet area; controlling the cleaning robot to clean at least part of the non-carpet area in the cleaning task map through at least the mopping component; automatically cleaning the carpet according to the carpet area in the cleaning task map Brushing and at least mopping non-carpet areas do not require the user to set different cleaning methods for different areas, which improves the intelligence of the cleaning robot.
- the flooris swept and mopped simultaneously with the mopping and mopping parts.
- a preset period of timesuch as one week. If so, the leakage filling action is performed when cleaning the room along the edge. Otherwise, the room is cleaned along the edge separately. No leak-proofing action is performed; after cleaning the edge of the room, clean the floor of the room.
- the ground pressure and mopping humiditycan be set according to the ground material.
- the cleaning robotcan be controlled to clean the position of the brushing and/or mopping member when it is lifted to prevent repeated contamination. contaminate the ground.
- the preset cleaning areaincludes a target area that needs to be repeatedly mopped based on the degree of dirt in the preset cleaning area; and at least part of the target area may be repeatedly mopped.
- an image indicating changes in the degree of dirtiness of each area(which may be called a dirt heat map) is output, and/or an image indicating a cleaning trajectory is output.
- a visual interface for executing taskssuch as animation or short video.
- the brushing partwhen in the hosting mode, first determine whether there is a carpet. If there is a carpet, lift the actuators such as the brushing part and the dragging part and then drive out of the base station; after driving out of the base station, the brushing part works to keep the scanning part and Lift the mopping part and navigate to the carpet; after reaching the edge of the carpet, place the bristles of the side brush part under the robot body or allow the side brush part to rotate freely, put down the middle sweeping part and control it to start working and then go up to the carpet, on the carpet When it is on, the side brush can rotate freely; after cleaning the current carpet, navigate to another carpet and clean the next carpet until all carpets are cleaned and navigate back to the base station.
- the side brushkeeps working and the middle scan and the mopping element remain in the raised state; stow away each cleaning actuator when arriving at the base station.
- the cleaning tank of the mopping elementAfter arriving at the cleaning tank of the mopping element, maintain the stowed/raised state of the side brush element and the middle sweeping element, and put down the mopping element to align the Mop pieces for cleaning.
- the cleaning of the mopping partAfter the cleaning of the mopping part is completed, keep the brushing and mopping parts raised, lift the mopping part, and drive out of the base station; after driving out of the base station, brush the parts, keep the mid-scanning part and the mopping part in the lifted state, navigate to the task point, and arrive at Put the mop down after the task point to at least clean the non-carpeted areas of the floor.
- the cleaning of the floormay include cleaning of each area on the floor, such as block cleaning, and may also include edge cleaning or edge leakage cleaning.
- cleaning the floorwhen the cleaning conditions of the mop parts are met, such as when the cleaned floor area or time reaches the preset value, it navigates back to the base station; or when the cleaning robot has insufficient power or completes the cleaning task, it navigates back to the base station; The base station can clean the mopping parts and charge the cleaning robot.
- the degree of dirtiness of the ground that has been moppedcan be determined based on the degree of dirtiness of the mopping parts. When the degree of dirtiness of the mopped ground is relatively large, you can navigate to the ground for repeated mopping.
- the mopping partscan be cleaned at the base station. After the cleaning is completed, the mopping parts can be dried and To charge the cleaning robot, all actuators can also be stowed away.
- Cleaning robotscan be used to automatically clean floors, and their application scenarios can include household indoor cleaning, large-scale place cleaning, etc.
- the cleaning robotcan mop the floor through mopping parts. After mopping the floor for a period of time, the mopping parts often become dirty or have insufficient power. They need to return to the base station to clean or recharge the mopping parts; currently, they are usually cleaned after receiving When the robot returns to the base station for maintenance instructions, it stops cleaning and returns to the base station immediately. Sometimes it needs to return to the stop point to continue cleaning after maintenance.
- the cleaning strategy of going back and forth to the stop pointreduces the cleaning efficiency to a certain extent.
- FIG. 9is a schematic flowchart of a control method for a cleaning robot provided by an embodiment of the present application.
- the control method of the cleaning robotcan be applied in a cleaning system to control the cleaning robot in the system so that the cleaning robot performs cleaning tasks and cleans the area corresponding to the cleaning task map.
- the area corresponding to the cleaning task mapcan be any area to be cleaned such as a family space, a room unit of a family space, a partial area of a room unit, a large place, or a part of a large place.
- the area corresponding to the cleaning task mapcan refer to the larger area that is cleaned for the first time, such as the entire room unit; it can also refer to the area that needs to be cleaned after the first cleaning of the larger area, such as the backrest in the room unit. Wall area, or obstacle area.
- the cleaning task mapcan be established by exploring the current space in response to mapping instructions, or it can be updated based on obstacles, carpets, etc. identified by the cleaning robot during the cleaning process; optionally, the cleaning
- the task mapmay be a map of a cleaning area specified by the user. For example, in response to the user selecting a cleaning area such as one or more rooms on the map, determining the one or more rooms as a cleaning task map, or in response to the user selecting the cleaning area on the map.
- the cleaning area circled aboveis, for example, a partial area of one or more rooms.
- the partial area of one or more roomsis determined as a cleaning task map, and is certainly not limited to this.
- the cleaning systemincludes one or more cleaning robots 100 and one or more base stations 200 .
- the base station 200is used in conjunction with the cleaning robot 100, at least for maintaining the cleaning robot; for example, the base station 200 can charge the cleaning robot 100, the base station 200 can provide a docking position for the cleaning robot 100, etc.
- the base station 200can also clean or replace the cleaning parts of the cleaning robot 100.
- the cleaning partsmay include brushing parts, such as side brushes and middle brushes. The brushing parts are used to sweep the ground to remove garbage or dirt on the ground.
- the cleaning partmay also include a mopping part, and the mopping part is used to mop the ground to clean stains on the ground.
- the cleaning systemalso includes a control device 300.
- the control device 300can be used to implement the steps of the cleaning robot control method according to the embodiment of the present application.
- the robot controller of the cleaning robot 100 and/or the base station controller of the base station 200can serve as the control device 300 alone or in combination, for implementing the steps of the method in the embodiment of the present application.
- the cleaning systemincludes a separate control device 300 for implementing the steps of the method in the embodiment of the present application.
- the control device 300can be provided on the cleaning robot 100 or can be provided on the base station 200; of course, it can also It is not limited thereto.
- the control device 300may be a device other than the cleaning robot 100 and the base station 200, such as a home smart terminal, a master control device, etc.
- the cleaning robot 100can be used to automatically clean the floor.
- the application scenarios of the cleaning robot 100can be household indoor cleaning, large-scale place cleaning, etc.
- control method of the cleaning robot according to the embodiment of the present applicationincludes steps S110 to S130.
- the amount of dirt that the cleaning robot's mopping parts can absorbis limited. When the mopping parts absorb more dirt, the cleaning effect on the ground is poor.
- the mopping partsneed to be maintained, such as cleaning or replacing them. To ensure that the mopping parts have a better cleaning effect after maintenance; for example, the cleaning robot returns to the base station to clean or replace the mopping parts; optionally, the mopping parts can also be maintained by cleaning without returning to the base station.
- Robot completionfor example, the cleaning robot has its own water tank, which can directly clean the mopping parts, or the cleaning robot has its own mopping part replacement device, which can directly replace the mopping parts.
- the power of the cleaning robotis also limited. If the power drops to the preset power when cleaning the floor, it needs to return to the base station for charging; the amount of water on the mopping part of the cleaning robot and/or the water supply on the cleaning robot is used to supply water to the mopping part.
- the amount of water in the water tankis also limited. When the water amount is insufficient, you can return to the base station to add water; the dust box on the cleaning robot used to collect dirt can also hold a limited amount of dirt. When the amount of dirt contained is large, maintenance is also required. .
- the first maintenance instructionis generated according to a user's maintenance control operation.
- the userperforms a maintenance control operation before going to bed, such as performing the maintenance control operation on an interactive unit of a cleaning robot, a base station or a user terminal, and generating the first maintenance instruction according to the maintenance control operation.
- the maintenance rulesare determined according to the user's maintenance control operation. For example, if the cleaning robot is maintained at nine o'clock every night, the first maintenance instruction is generated at nine o'clock every night. Of course, it is not limited to this. For example, the cleaning robot can be maintained every six hours. Cleaning robot for maintenance.
- the first maintenance instructionis generated based on the time since the last maintenance. For example, when the time since the last maintenance is six hours, the first maintenance instruction is generated to periodically control the cleaning robot to perform maintenance. Or the first maintenance instruction can be generated according to the working time of the cleaning robot; for example, the cleaning robot generates the first maintenance instruction every time it cleans for 10 minutes.
- obtaining the first maintenance instructionincludes: obtaining the workload completed by the cleaning robot when the cleaning robot cleans the preset cleaning area; when the workload completed by the cleaning robot exceeds When the magnitude reaches the first workload threshold, the first maintenance instruction is generated.
- the first maintenance instructionis generated when the workload completed by the cleaning robot reaches the first workload threshold to control the cleaning robot to perform maintenance, so that the maintained cleaning robot can have a better cleaning effect.
- the workloadincludes at least one of the following: the amount of dirt adsorbed by the cleaning robot's mopping part when mopping the floor, the power consumption of the cleaning robot when cleaning the floor, the amount of time the cleaning robot cleans the floor.
- the amount of water consumed when the cleaning robot cleans the floorthe amount of dirt collected when the cleaning robot cleans the floor
- the amount of sewage collected when the cleaning robot cleans the floorthe area of the floor cleaned by the cleaning robot, and the path length of the floor cleaned by the cleaning robot.
- the first workload threshold N1can be determined based on the performance parameters of the cleaning robot, such as the battery life, clean water tank capacity, dust collection tank capacity, sewage tank capacity, the maximum dirt value d_max of the mopping part, etc. At least one of them is confirmed.
- the first workload thresholdcan be determined based on the changing relationship between the cleaning effect of the mopping element and the area of the floor cleaned by the cleaning robot; for example, after maintenance of the cleaning robot The cleaning robot is controlled to clean the floor.
- the first workload thresholdis determined according to the area of the floor cleaned by the cleaning robot.
- the first workload thresholdcan be determined based on the capacity of the clean water tank; the workload includes sewage collection when the cleaning robot cleans the floor.
- the first workload thresholdmay be determined based on the capacity of the sewage tank.
- the first workload thresholdmay be based on the cleaning effect of the mopping part and the amount of dirt adsorbed by the mopping part when mopping the floor.
- the relationship between the changes in quantityis determined; for example, when the floor is mopped after the mop part is maintained, when the mopping effect of the mop part on the ground is very poor, the amount of dirt absorbed by the mop part will be determined based on the amount of dirt absorbed by the mop part.
- the dirt value ddetermines the first workload threshold; of course, it is not limited to this.
- the first workload thresholdcan be determined based on the maximum dirt value d_max of the mopping element, and the maximum dirt value d_max is an empirical value. , which can be measured in a laboratory, for example.
- the cleaning robotcan still perform at least one maintenance, such as when the power consumption of the cleaning robot when cleaning the floor reaches the corresponding power consumption. After the first workload threshold, the remaining power of the cleaning robot can still support the cleaning robot to return to the base station for charging.
- the workload completed by the cleaning robotwhen the workload completed by the cleaning robot reaches the first workload threshold, it can still work for a period of time, such as cleaning part of the floor, and after working for a period of time, it can still perform at least one maintenance.
- the first workload thresholdis smaller than the second workload threshold, for example, the first workload threshold is 0.6 to 0.8 times the second workload threshold, and is certainly not limited thereto.
- the workload completed by the cleaning robotreaches the first workload threshold, it can still work for a period of time.
- the workload completed by the cleaning robotreaches the second workload threshold, the work is forcibly ended. and perform maintenance.
- the second workload threshold N2is an absolute backwash threshold. When the amount of dirt adsorbed by the cleaning robot's mopping part reaches the absolute backwashing threshold when mopping the floor, it is determined that the mopping part reaches the maximum dirt value d_max, and it is impossible to Before mopping and cleaning, the mopping parts must be maintained.
- the preset cleaning areacan be obtained by dividing the cleaning task map, that is, the room in the area to be cleaned.
- the area to be cleanedcan be any area to be cleaned such as a family space, a room unit of a family space, a part of a room unit, a large place or a part of a large place.
- a roommay be a preset cleaning area, or a room may have multiple preset cleaning areas; of course, it is not limited thereto.
- a preset cleaning areaincludes one room and at least part of another room.
- the preset cleaning areacan be determined based on the user's division on the cleaning task map, or the division can be determined based on preset area division rules.
- obtaining the workload completed by the cleaning robot when the cleaning robot cleans the preset cleaning areaincludes: obtaining the workload of each unit area in the preset cleaning area. ; Determine the workload completed by the cleaning robot based on the workload of the unit area cleaned by the cleaning robot.
- the graphical characteristics of the room where the preset cleaning area is located and/or the room identification of the roomcan be obtained, and each element in the preset cleaning area is determined based on the graphical characteristics and/or the room identification of the room.
- the workload per unit areacan be obtained, and each element in the preset cleaning area is determined based on the graphical characteristics and/or the room identification of the room.
- the unit areacan be a grid in the cleaning task map, but of course it is not limited to this.
- the unit areacan be an area of any size, such as an area of 0.5 square meters or an area of 1 square meter; the unit area It may be a rectangle or a square, and of course is not limited thereto, for example, it may be a parallelogram.
- the workloadcan be determined according to the boundaries of the unit area and the room. and/or the distance between obstacles in the room determines the workload per unit area.
- the workload of the unit areais negatively correlated with the distance between the unit area and the boundary of the room and/or obstacles in the room.
- the environment map of the preset cleaning areacontains multiple grids.
- One gridis a unit area, or multiple grids are combined into a unit area.
- Each grid in the environment mapis calculated.
- the distance to the obstacleis used to determine the workload of each unit area.
- the maximum distance, the minimum distance, or the average of the distances between the multiple grids and the obstacleis determined. The workload per unit area.
- the workload of the unit areaincludes the amount of dirt absorbed by the cleaning robot's mopping member when mopping the unit area;
- the amount of dirtis inversely related to the distance between the unit area and the boundaries of the room and/or the obstacles in the room.
- the workload of the unit areaincludes the amount of dirt collected when the cleaning robot cleans the unit area; the amount of dirt collected when the cleaning robot cleans the unit area is equal to the unit area and The boundaries of a room and/or the distance between obstacles in said room are inversely related.
- Arepresents the obstacle
- the thick black linerepresents the wall
- the workload of the unit areaincludes the amount of dirt absorbed by the cleaning robot's mopping member when mopping the unit area;
- the amount of dirtis positively related to the dirt level of the unit area.
- the workload of the unit areaincludes the amount of dirt collected by the cleaning robot when cleaning the unit area; the amount of dirt collected by the cleaning robot when cleaning the unit area, and the amount of dirt collected by the cleaning robot when cleaning the unit area.
- the degree of dirtinessis positively correlated.
- the graphical characteristics of the roominclude the distribution of dirt in the room (such as a dirt heat map), such as the dirt level of each unit area; each unit area can be determined based on the dirt level of the unit area in the room.
- the workload of the unit areafor example, the workload of the unit area is positively correlated with the degree of dirt of the unit area.
- the distribution of dirt in the roomcan be determined based on the detection results of the cleaning robot's sensors, such as vision sensors; or a separate image sensor can be used to photograph the floor in the room, identify the captured images, and determine the room.
- the distribution of dirt in the room; or after the cleaning robot completes cleaning different areas in the room, the dirt status in different areascan be determined based on the detection information of the sewage in the cleaning mop parts, or based on the amount of dirt in the dust box Determine the dirtiness of different areas.
- the distribution of dirt in the roomcan be the current distribution of dirt in the room, or it can also be the distribution of dirt in the room in historical data.
- the amount of dirt absorbed or the amount of dirt collected when mopping the floorcan more accurately reflect the workload of the cleaning robot than determining the workload such as the cleaned area and path length; for example, when the ground is less dirty When the mopping part is used, the area that can be cleaned is more. If only the cleaned area is used as the workload to control the cleaning robot for maintenance, the number of maintenance will be more and the cleaning efficiency will be reduced. According to the dirt adsorbed when mopping the floor, Controlling the amount of dirt or dirt collected by the cleaning robot for maintenance can reduce the number of maintenance times and thereby improve cleaning efficiency.
- the magnitude of the workload of the preset cleaning areais less than or equal to a second workload threshold, and the second workload threshold is greater than the first workload threshold, so that the cleaning robot When the preset cleaning area is cleaned, the magnitude of the workload of the cleaning robot does not exceed the second workload threshold.
- the graphical characteristics of the roomcan be obtained, and the graphical characteristics include the boundaries of the room; according to the second workload threshold and the graphical characteristics, the dividing line of the room is determined, so that the dividing line and the boundary of the room form There are at least two preset cleaning areas, and the magnitude of the workload of each preset cleaning area is less than or equal to the second workload threshold. So that the cleaning robot can interrupt the current cleaning task after completing the workload of a preset cleaning area; it can make the cleaning robot achieve better cleaning effect and higher cleaning efficiency when cleaning the room according to the preset cleaning area. efficiency.
- determining the task execution status of the cleaning robotincludes: in response to the first maintenance instruction, determining whether the current cleaning task of the cleaning robot has been completed. Tasks performed and/or tasks not performed.
- the current cleaning task of the cleaning robotis to clean the preset cleaning area.
- determining the task execution status of the cleaning robotincludes determining at least one of the following: determining the progress of the current cleaning task of the cleaning robot, determining the type of tasks that the cleaning robot has performed, determining the type of tasks that have not been performed, and determining the number of tasks that have not been performed. workload.
- the cleaning robotwhen the first maintenance instruction is obtained, the cleaning robot is not directly controlled to perform maintenance, but the task execution status of the cleaning robot is determined in response to the first maintenance instruction, and According to the task execution status, the cleaning robot is controlled to perform maintenance.
- controlling the cleaning robot to perform maintenance according to the task execution statusincludes: according to at least one of the following: the progress of the current cleaning task of the cleaning robot, the type of tasks that the cleaning robot has performed, the The type of tasks not performed by the cleaning robot and the workload of the tasks not performed are described, and the cleaning robot is controlled to perform maintenance.
- controlling the cleaning robot to perform maintenanceincludes: generating a second maintenance instruction to directly control the cleaning robot to perform maintenance, or generating a second maintenance instruction after the cleaning robot completes at least part of the unperformed tasks. To control the cleaning robot for maintenance.
- the maintenance timing of the cleaning robotcan have a certain loose adjustment range to reduce the impact of cleaning robot maintenance on cleaning efficiency.
- controlling the cleaning robot to perform maintenanceincludes but is not limited to at least one of the following: controlling the cleaning robot to return to the base station, and the base station performs maintenance on the cleaning robot; having the cleaning robot perform maintenance on its own, such as Cleaning and mopping parts; prompting the user to perform maintenance on the cleaning robot, for example, sending prompt information to the user terminal to prompt the user to maintain the dust box on the cleaning robot for collecting dirt.
- controlling the cleaning robot to perform maintenance according to the task execution statusincludes: when the task execution status is determined to mean that the cleaning robot completes the current cleaning task, controlling the cleaning robot to perform maintenance.
- Maintenancemeans immediately controlling the cleaning robot to perform maintenance according to the task execution status. For example, when the cleaning robot completes a preset cleaning, and the workload completed by the cleaning robot reaches the first workload threshold, the cleaning robot can be immediately controlled to perform maintenance; the cleaning robot can also be controlled to perform maintenance again after the maintenance is completed.
- the above preset cleaning areacan be repeatedly cleaned, or other preset cleaning areas in the cleaning task map can be cleaned.
- controlling the cleaning robot to perform maintenance according to the task execution statusincludes: when it is determined that the workload of the unexecuted task is less than or equal to the preset workload, controlling the cleaning robot to complete all tasks. Perform maintenance after the tasks described above are not performed.
- the preset workloadcan be determined based on the difference between the second workload threshold and the first workload threshold.
- the preset workloadis 0.6 to 1 times the difference, such as 0.8 times or 0.9 times.
- the current cleaning task of the cleaning robotWhen the first maintenance instruction is obtained and the current cleaning task of the cleaning robot has not been completed, for example, there are still several unit areas that have not been mopped in the preset cleaning area, then it is determined that the current cleaning task has not been executed. Whether the workload of the task is less than or equal to the preset workload, for example, determine whether the sum of the workload of several unit areas is less than or equal to the preset workload.
- the control The cleaning robotperforms maintenance after completing the unexecuted tasks; optionally, after the maintenance is completed, there is no need to return to the preset cleaning area to perform the current cleaning task, so as to reduce the number of maintenance times of the cleaning robot.
- controlling the cleaning robot to perform maintenance according to the task execution statusincludes: when the workload of the unexecuted tasks is greater than the preset workload, and the type of the unexecuted tasks includes all
- the cleaning robotmoves to the door of the room, the cleaning robot is controlled to perform maintenance after moving to the door of the room.
- Match the cleaning trajectory of the preset cleaning area with the trajectory returning to the base station for maintenance(such as backwashing trajectory).
- the cleaning robotreaches the door of the room according to the planned path, and then returns to the base station for maintenance, the path consumption of returning to the base station can be reduced.
- At least part of the path of the cleaning robotis a path moving toward the doorway of the room.
- the cleaning robotis moving along the at least part of the path toward the door of the room, that is, the type of task that the cleaning robot is not performing is moving along the at least part of the path toward the door of the room, then You can continue to move at least part of the distance along the at least part of the path toward the door of the room (reach the door or arrive near the door) and clean the area corresponding to the at least part of the path, and then generate the second maintenance instruction to control the cleaning Robots perform maintenance.
- the area on the path moving to the door of the roomis not cleaned.
- at least part of the areamay be cleaned; after the maintenance is completed, the area may not be cleaned. Either the room needs to be returned to continue cleaning, or the remaining part of the path does not need to be cleaned.
- the cleaning robotwhen the first maintenance instruction is obtained, the cleaning robot is moving along the at least part of the path toward the door of the room, that is, the type of task the cleaning robot has performed is moving toward the room along the at least part of the path. If the type of the unexecuted task is to move to the door of the room along the at least part of the path, you can continue to move and clean along the at least part of the path to the door of the room until the workload completed by the cleaning robot reaches the At a second workload threshold, or until the cleaning robot moves and cleans to the doorway of the room, the second maintenance instruction is generated to control the cleaning robot to perform maintenance.
- the cleaning robotwhen the first maintenance instruction is obtained, the cleaning robot is moving toward the doorway of the room along the at least part of the path, and the path where the task is not performed includes a path moving toward the doorway of the room and away from the doorway.
- the path to the door of the roomthat is, the type of task the cleaning robot has performed is to move toward the door of the room along at least part of the path
- the type of task that the cleaning robot has not performedis to move to the door of the room along the at least part of the path, and cleaning can be controlled.
- the robotmoves toward the door instead of controlling the cleaning robot to move away from the door of the room, so as to reduce the number of turns of the cleaning robot between the door and the interior of the room and improve cleaning efficiency.
- controlling the cleaning robot to perform maintenance according to the task execution statusincludes: when the type of the unexecuted task includes the cleaning robot cleaning along the edge of an obstacle, controlling the cleaning robot Perform maintenance after completing cleaning along the edges of said obstructions. After the maintenance is completed, the cleaning robot does not need to return to the obstacle again, which can save path consumption and improve cleaning efficiency.
- the cleaning robotwhen the type of the unexecuted task is that the cleaning robot cleans along the edge of the obstacle, and the executed task is along part of the edge of the obstacle, the cleaning robot is controlled to finish cleaning.
- the barrieris maintained after the edge.
- the cleaning robotis controlled to start cleaning along the edge of the obstacle.
- the edge of the obstacleis maintained before cleaning, that is, the cleaning robot can be directly controlled to perform maintenance, and continue to perform the unexecuted tasks after maintenance.
- the methodfurther includes: when it is determined that the cleaning robot is to be controlled to perform maintenance according to the task execution status, outputting prompt information, the prompt information being used to prompt the user that the cleaning robot is ready for maintenance.
- the prompt informationis output when the second maintenance instruction is generated.
- the prompt informationis output through an interactive unit of a cleaning robot, a base station or a user terminal.
- the control method of a cleaning robotincludes: obtaining a first maintenance instruction; in response to the first maintenance instruction, determining the task execution status of the cleaning robot; and controlling the cleaning robot according to the task execution status.
- Cleaning robot for maintenanceBy controlling the cleaning robot to perform maintenance according to the task execution status of the cleaning robot with a corresponding control strategy, the maintenance timing of the cleaning robot can have a certain loose adjustment range to reduce the impact of cleaning robot maintenance on cleaning efficiency.
- control method of the cleaning robotincludes:
- the first maintenance instructionis generated
- the cleaning robotis controlled to complete the unexecuted tasks, and after completing The second maintenance instruction is generated after the unexecuted tasks; when the workload of the unexecuted tasks is greater than the preset workload, and the unexecuted tasks include the cleaning robot moving to the door of the room, the cleaning robot is controlled to move to the door, and when the workload Generate a second maintenance instruction when reaching the second workload threshold or moving to the door;
- the cleaning robotis controlled to perform maintenance according to the second maintenance instruction.
- the cleaning robotwhen the amount of work completed by the cleaning robot reaches the second workload threshold, the cleaning robot is forcibly controlled to perform maintenance. For example, it can ensure that the cleaning robot can return to the base station for maintenance.
- control method of a cleaning robotincludes: when the cleaning robot cleans a preset cleaning area, obtaining the workload completed by the cleaning robot; when the workload completed by the cleaning robot When the magnitude reaches the first workload threshold, the cleaning robot is controlled to perform maintenance.
- existing cleaning robotsusually control the cleaning robot to return to the base station for maintenance according to a fixed cleaning area.
- the degree of dirt in different areasis different. If the cleaning area is set to be large, the cleaning ability of the cleaning robot will not be able to complete the cleaning well when encountering a dirty area, and the cleaning effect will be greatly affected; If the designated area is small, when the floor is not very dirty, the cleaning robot will return to the base station for maintenance when it still has more cleaning capabilities, and the cleaning efficiency will be affected. That is, the cleaning robot returns to the base station for maintenance according to a fixed cleaning area plan, which cannot take into account both cleaning effect and cleaning efficiency.
- Embodiments of the present applicationcan obtain both the cleaning effect and the performance of the cleaning robot by obtaining the workload completed by the cleaning robot, and controlling the cleaning robot to perform maintenance when the magnitude of the workload completed by the cleaning robot reaches the first workload threshold. Cleaning efficiency.
- the workloadincludes at least one of the following: the amount of dirt absorbed by the cleaning robot's mopping part when mopping the floor, the power consumption of the cleaning robot when cleaning the floor, the amount of time the cleaning robot cleans the floor. The amount of water consumed when the cleaning robot cleans the floor, the amount of dirt collected when the cleaning robot cleans the floor, and the amount of sewage collected when the cleaning robot cleans the floor.
- obtaining the workload completed by the cleaning robotincludes: obtaining the graphical characteristics of the room where the preset cleaning area is located and/or the room identification of the room. According to the graphical characteristics and/or The room identification of the room determines the amount of work performed by the cleaning robot. Exemplarily, the workload of each unit area in the room is determined based on the graphical features and/or the room identification of the room, and the workload of the unit area cleaned by the cleaning robot is determined. The amount of work done by the cleaning robot. For the step of determining the workload of the unit area, reference may be made to the description of the foregoing embodiments and will not be described again here.
- the preset cleaning areasare divided according to the workload of each unit area in the room.
- one or more roomscan be divided into one or more preset cleaning areas according to the workload of each unit area in the room or rooms.
- the workload value domain rangedetermines the dividing line of the room based on the workload value domain range and the workload of each unit area in the room, so that the dividing line and the boundary of the room form
- the upper limit of the workload value rangemay be used as the first workload threshold.
- the task execution status of the cleaning robotis determined; and based on the task execution status, the cleaning robot is controlled to perform maintain.
- the control method of the cleaning robot shown in Figure 9can be described, which will not be described again here.
- the methodfurther includes: determining the cleaning order of the plurality of preset cleaning areas based on the workload of each unit area in the plurality of preset cleaning areas.
- Clean areaFor example, when the cleaning requirements of the cleaning mode are higher (such as deep cleaning mode), the preset cleaning area with the larger workload sum per unit area is cleaned first; when the cleaning requirements of the cleaning mode are lower (such as quick cleaning mode) In this case, first clean the preset cleaning area where the sum of the workload per unit area is smaller.
- the methodfurther includes: determining a cleaning path when cleaning the preset cleaning area based on the workload of each unit area in the preset cleaning area.
- the cleaning pathmay preferentially cover unit areas with a larger workload to achieve an obvious cleaning effect faster; or it may also preferentially cover unit areas with a smaller workload to reduce the risk of adsorbing more dirt. Mopping elements reduce cleaning effectiveness.
- itcan also be determined according to the cleaning mode that the cleaning path preferentially covers the unit area with a large workload, or the cleaning path preferentially covers the unit area with a small workload. For example, in the deep cleaning mode, the cleaning path preferentially covers the unit area with a large workload, but of course it is not limited to this.
- Cleaning robotscan be used to automatically clean floors, and their application scenarios can include household indoor cleaning, large-scale place cleaning, etc.
- the body of the cleaning robotis usually controlled to maintain a predetermined distance from the wall or obstacle.
- the cleaning mechanismStructural design limitations.
- cleaning along room walls or obstacle areasthere is an area between the cleaning robot and the room wall or obstacle that cannot be cleaned by the cleaning structure. That is, the cleaning robot maintains a predetermined distance along the room wall or obstacle.
- cleaning areasthere are areas that exceed the cleaning limit of the cleaning structure.
- FIG. 12is a schematic flowchart of a control method for a cleaning robot provided by an embodiment of the present application.
- the control method of the cleaning robotcan be applied in a cleaning system to control the cleaning robot in the system so that the cleaning robot performs cleaning tasks and cleans the area corresponding to the cleaning task map.
- the area corresponding to the cleaning task mapcan be any area to be cleaned such as a family space, a room unit of a family space, a partial area of a room unit, a large place, or a part of a large place.
- the area corresponding to the cleaning task mapcan refer to the larger area that is cleaned for the first time, such as the entire room unit; it can also refer to the area that needs to be cleaned after the first cleaning of the larger area, such as the backrest in the room unit. Wall area, or obstacle area.
- the cleaning systemincludes one or more cleaning robots 100 and one or more base stations 200 .
- the base station 200is used in conjunction with the cleaning robot 100.
- the base station 200can charge the cleaning robot 100, and the base station 200 can provide a parking position for the cleaning robot 100, etc.
- the base station 200can also clean the mopping member 110 of the cleaning robot 100, where the mopping member 110 is used to mop the floor.
- the cleaning systemalso includes a control device 300.
- the control device 300can be used to implement the steps of the cleaning robot control method according to the embodiment of the present application.
- the robot controller of the cleaning robot 100 and/or the base station controller of the base station 200can be used alone or in combination as the control device 300 to implement the steps of the cleaning robot control method according to the embodiment of the present application; in other embodiments , the cleaning system includes a separate control device 300 for implementing the steps of the cleaning robot control method in the embodiment of the present application.
- the control device 300can be provided on the cleaning robot 100, or can be provided on the base station 200; of course, it is not Limited to this, for example, the control device 300 may be a device other than the cleaning robot 100 and the base station 200, such as a home smart terminal, a master control device, etc.
- the cleaning robot 100includes a robot body, a driving motor, a sensor unit, a robot controller, a battery, a walking unit, a robot memory, a robot communication unit, a robot interaction unit, a mopping member 110, a charging component, and the like.
- the mopping member 110is used to mop the ground, and the number of the mopping member 110 may be one or more.
- the mopping member 110is, for example, a mop.
- the wiping member 110is disposed at the bottom of the robot body, specifically at a front position of the bottom of the robot body.
- a driving motoris provided inside the robot body, and two rotating shafts protrude from the bottom of the robot body, and the mopping member 110 is sleeved on the rotating shafts. The driving motor can drive the rotating shaft to rotate, so that the rotating shaft drives the wiping member 110 to rotate.
- the cleaning robot 100further includes a brushing part 120 , and the brushing part 120 includes a side brushing part 121 and/or a middle sweeping part 122 .
- the cleaning robot 100is a cleaning robot that integrates sweeping and mopping.
- the brushing part 120 and the mopping part 110can work together.
- the brushing part 120 and the mopping part 110work at the same time, and the brushing part 120 and the mopping part 110 continue to work alternately, etc. ;
- the brushing and sweeping part 120 and the mopping part 110can also work separately, that is, the brushing and sweeping part 120 performs cleaning work alone, or the mopping part 110 performs mopping work alone.
- the side brushing part 121sweeps dust and other dirt from the outside to the middle area, and the middle sweeping part 122 continues to sweep the dirt in the middle area to the dust collector.
- the number of side brushes 121is not limited. As shown in FIG. 13 , the cleaning robot 100 has two side brushes 121 arranged on the left and right sides. Alternatively, only one side brush 121 is arranged on the left or right side.
- the brushing and sweeping member 120can be disposed on the front side of the mopping member 110. Therefore, when the brushing and sweeping member 120 and the mopping member 110 work together, the cleaning robot 100 can perform front sweeping and rear mopping. Compared with brushing and sweeping, The member 120 is disposed behind the mopping member 110, which can prevent the brushing member 120 from being wetted by the wet area dragged by the mopping member 110, and also prevent the dirty brushing member 120 from soiling the mopped area in front.
- the walking unitis a component related to the movement of the cleaning robot 100 and is used to drive the cleaning robot 100 to move so that the mopping member 110 and/or the brushing member 120 mops the ground.
- the robot controlleris arranged inside the robot body, and is used to control the cleaning robot 100 to perform specific operations.
- the robot controllermay be, for example, a central processing unit (Central Processing Unit, CPU) or a microprocessor (Microprocessor).
- CPUCentral Processing Unit
- MicroprocessorMicroprocessor
- the robot controlleris electrically connected to components such as batteries, robot memory, drive motors, walking units, sensor units, and robot interaction units to control these components.
- the batteryis provided inside the robot body, and the battery is used to provide power to the cleaning robot 100 .
- the robot bodyis also provided with a charging component, which is used to obtain power from an external device to charge the battery of the cleaning robot 100 .
- the robot memoryis set on the robot body, and the robot memory stores programs. When the program is executed by the robot controller, the corresponding operations are implemented.
- the robot communication unitis provided on the robot body. The robot communication unit is used to allow the cleaning robot 100 to communicate with external devices.
- the cleaning robot 100can communicate with the terminal and/or communicate with the base station 200 through the robot communication unit.
- the base station 200is a cleaning device used in conjunction with the cleaning robot 100 .
- the sensor unit provided on the robot bodyincludes various types of sensors, such as lidar, collision sensor, distance sensor, drop sensor, counter, and gyroscope.
- the lidaris set on the top of the robot body.
- the surrounding environment informationcan be obtained, such as the distance and angle of obstacles relative to the lidar, etc.
- camerascan also be used instead of lidar. By analyzing the obstacles in the images captured by the cameras, the distance and angle of the obstacles relative to the camera can also be obtained.
- the crash sensorincludes a crash housing and a trigger sensor. When the cleaning robot 100 collides with an obstacle through the collision housing, the collision housing moves toward the inside of the cleaning robot 100 and compresses the elastic buffer.
- the collision housingAfter the collision housing moves a certain distance into the cleaning robot 100, the collision housing contacts the trigger sensor, and the trigger sensor is triggered to generate a signal, which can be sent to the robot controller in the robot body for processing. After hitting the obstacle, the cleaning robot 100 moves away from the obstacle, and under the action of the elastic buffer, the collision shell moves back to its original position.
- the distance sensorcan specifically be an infrared detection sensor, which can be used to detect the distance from the obstacle to the distance sensor.
- the distance sensoris arranged on the side of the robot body, so that the distance value from the obstacle located near the side of the cleaning robot 100 to the distance sensor can be measured by the distance sensor.
- the distance sensormay also be an ultrasonic ranging sensor, a laser ranging sensor, a depth sensor, etc.
- the drop sensoris provided at the bottom edge of the robot body. When the cleaning robot 100 moves to the edge of the ground, the drop sensor can detect that the cleaning robot 100 is at risk of falling from a high place, thereby performing corresponding anti-fall reactions, such as cleaning robot 100 stops moving, or moves away from the falling position, etc.
- the gyroscopeis used to detect the rotation angle of the cleaning robot 100, thereby determining the orientation of the cleaning robot 100.
- the robot interaction unitis provided on the robot body, and the user can interact with the cleaning robot 100 through the robot interaction unit.
- the robot interaction unitincludes, for example, switch buttons, speakers, microphones, touch switches/screens and other components.
- the usercan control the cleaning robot 100 to start or stop working by pressing the switch button or touch switch/screen, and can also display the working status information of the cleaning robot through the touch screen.
- the cleaning robot 100can play prompt sounds to the user through the speaker, obtain the user's control instructions through the microphone, or locate the user's location by obtaining the user's voice.
- the cleaning robot 100 described in the embodiment of the present applicationis only a specific example and does not constitute a specific limitation to the cleaning robot 100 of the embodiment of the present application.
- the cleaning robot 100 of the embodiment of the present applicationcan also be implemented in other specific ways.
- the cleaning robotmay have more or fewer components than the cleaning robot 100 shown in FIG. 1 .
- the control method of a cleaning robotincludes steps S410 to S420.
- one or at least two preset frequencies of the boundary leak cleaning taskare obtained, and based on the preset frequencies, the cleaning robot is controlled to clean the preset cleaning area.
- the preset cleaning areaperforms boundary leakage cleaning tasks.
- the preset cleaning areaincludes room boundaries and/or outlines of obstacles, where room boundaries include, for example, walls, steps, thresholds, etc., and obstacles include, for example, cabinets, beds, sofas, tables, chairs, etc., and of course, It is not limited to this.
- the outline of obstacles connected with walls, steps, thresholds, etc.can also be determined as the room boundary.
- the cleaning robotwhen the cleaning robot performs the boundary cleaning task, it can perform boundary cleaning and leaking on the boundaries of the room, and can also perform boundary cleaning and leaking on the contour boundaries of obstacles.
- the outline of the obstaclecan be the outline of the orthographic projection of the obstacle (such as the outline of the orthographic projection of a sofa or bed), or it can be the actual outline of the obstacle that the cleaning robot can touch when the cleaning robot moves around the obstacle (such as the outline of the orthographic projection of the obstacle). outlines of table legs, chair legs).
- controlling the cleaning robot to perform a boundary leak-filling cleaning task according to the preset frequencyincludes: controlling the cleaning robot to move along the room boundary and/or the obstacle according to the preset frequency.
- a leak-filling cleaning actionis performed, wherein the leak-filling cleaning action includes at least one of the following: changing the angular velocity to rotate, changing the angular velocity and linear velocity to make a turn, changing the linear velocity to move forward or backward;
- the cleaning movementmaintains a predetermined distance from the boundary of the room or the outline of the obstacle while cleaning the preset cleaning area.
- the cleaning robotis cleaning the room boundaries, such as areas close to the wall. At this time, the coverage area of the mop part is limited, and the problem of leakage of cleaning is easy to occur. Please refer to Figure 14.
- Figure 14is a schematic diagram of the cleaning robot performing edge cleaning movement on the preset cleaning area through the mopping member 110, such as cleaning along the room boundary or obstacle outline in the preset cleaning area; the cleaning robot moves along the room When the boundary or obstacle outline is traveled and the area near the room boundary or obstacle outline is cleaned by the cleaning member such as the mopping member 110, the edge of the cleaning member such as the mopping member 110 maintains a predetermined distance L from the room boundary or the obstacle outline. , at this time, there will be a cleaning blind area due to the predetermined distance, that is, the area that is not cleaned by the cleaning parts.
- Figure 14shows a schematic diagram of the cleaning blind area in a working scenario in which the cleaning robot drags and cleans along a straight line.
- the cleaning robotcleans along the straight boundary of the room or obstacle.
- the working scenario of the cleaning robotis not limited to dragging and cleaning along a straight line.
- itcan also include at least one of the following: brushing and cleaning along the inner corners, dragging and cleaning along the inner corners, brushing and cleaning along the outer corners, and cleaning along the outer corners. Cleaning by mopping at outer corners, brushing along the column, and mopping along the column will also create cleaning blind spots in these scenarios.
- Embodiments of the present applicationcan control the cleaning robot to perform a boundary leak cleaning task to clean at least part of the cleaning blind area to improve the cleaning effect of the preset cleaning area. For example, it can at least improve the cleaning of room boundaries and areas near obstacles. Effect.
- Figure 15shows a schematic diagram of a cleaning robot performing a boundary leak-filling cleaning task in one embodiment.
- the cleaning robotrotates a preset angle clockwise or counterclockwise or any angle every time it travels a certain distance, so that the edges of cleaning parts such as the mopping part 110 are closer to the room boundary or obstacles.
- the object outlineexpands the moving trajectory of the mopping member 110 and increases the coverage area of the mopping member 110 to clean at least part of the cleaning blind area and improve the cleaning effect on areas such as room boundaries.
- FIG. 16is a schematic diagram of a cleaning robot performing a boundary leak-filling cleaning task in another embodiment.
- the preset cleaning areaincludes the outline of a room boundary or an obstacle
- controlling the cleaning robot to perform a boundary leak-filling cleaning taskincludes controlling the cleaning robot to perform an arcuate cleaning movement on the preset cleaning area, and when the cleaning robot When traveling in a straight line to the boundary of the room or the outline of the obstacle, a turning action is performed so that the coverage of the cleaning parts of the cleaning robot covers at least part of the cleaning blind area, where the cleaning blind area is where the cleaning robot performs During edge cleaning movement, the area between the boundary line of the coverage range of the cleaning element and the room boundary and/or the outline of the obstacle.
- whether the cleaning robot has traveled to the room boundary or the outline of the obstaclecan be determined by whether the distance between the cleaning robot and the outline of the room boundary or obstacle reaches a distance threshold when the cleaning robot moves in a straight line. It can also be determined by determining whether the cleaning robot moves in a straight line. Determine whether the cleaning robot has traveled to the outline of the room boundary or obstacle if it collides with the room boundary or obstacle. As shown in Figure 16, the cleaning robot approaches the room boundary or the outline of the obstacle along the arcuate trajectory. When it travels to a distance equal to the distance threshold from the room boundary or the outline of the obstacle, or collides with the room boundary or the obstacle.
- the edge of the cleaning member such as the dragging member 110is closer to the room boundary or the outline of the obstacle, so as to clean at least part of the cleaning blind area; optionally, the turning movement is not limited to the reverse direction.
- the clockwise directionmay be turned around, or the clockwise direction may be turned around; for example, the distance threshold may be determined based on the radius of the cleaning robot, the cleaning range of cleaning parts such as the mopping part 110, etc.
- the cleaning robotwhen cleaning each room, the cleaning robot is controlled to first perform an edge cleaning movement along the room boundary and perform the leak-filling cleaning action, and then the cleaning robot is controlled to arc along an arcuate path.
- Cleaning motionit can also be to perform an arcuate cleaning motion for all rooms, and then perform edge cleaning motions along the boundaries of each room and perform leak-proof cleaning actions; it can also be to perform an arcuate cleaning motion for the room, and control the cleaning robot to reach a distance from the room boundary.
- a bow-shaped turning movementis performed.
- the dragging element located at the tail of the robotcan drag at least part of the cleaning blind area near the room boundary without the need for additional cleaning movements along the edge.
- the cleaning robotis controlled to first perform an edge cleaning movement along the room boundary and perform the leak-filling cleaning action, and then the cleaning robot is controlled to arc along an arcuate path.
- Cleaning motionit can also be to perform an arcuate cleaning motion for all rooms, and then perform edge cleaning motions along the boundaries of each room and perform leak
- the methodbefore controlling the cleaning robot to perform an arcuate cleaning movement on the preset cleaning area, the method further includes: controlling the cleaning robot to perform an edge cleaning movement on the preset cleaning area.
- the cleaning motionmay determine room boundaries and/or the outline of obstacles in a preset cleaning zone. For example, as shown in Figure 16, in the case of boundary leakage correction by turning around during the arcuate cleaning movement, you can perform an edge cleaning movement in the room (no leakage filling movement is performed during the edgewise cleaning movement), and then perform arcuate cleaning When moving, the cleaning robot is controlled to perform a U-turn when it reaches the distance threshold from the room boundary or collides with the room boundary, so as to repair and clean at least part of the cleaning blind area.
- the area covered by the arcuate cleaning movementdoes not deduct the area covered by the edge cleaning movement. Area, that is, when the cleaning robot travels along the arcuate trajectory until the distance from the outline of the room boundary or the obstacle is equal to the distance threshold or the cleaning robot collides with the room boundary or obstacle, it turns counterclockwise or clockwise and turns around, and it can be cleaned Clean at least part of the blind area; you can also perform two arcuate cleaning movements, and the arcuate trajectories of the arcuate cleaning movements on both sides are orthogonal to ensure that most or all of the leaked mopping areas, that is, the cleaning blind area can be cleaned once .
- controlling the cleaning robot to perform a boundary leak-filling cleaning task according to the preset frequencymay include controlling the cleaning robot to perform a boundary leak-filling cleaning task at a preset time interval, such as once every 7 days; It can also include controlling the cleaning robot to perform a boundary leak cleaning task for a preset cleaning area, such as a room, after performing a preset number of cleaning tasks. For example, a room has been cleaned 7 times, and it needs to be cleaned for the 8th time. Boundary patch cleaning. Of course, it is not limited. For example, after the room performs a preset number of cleaning tasks, it is determined whether the time interval since the last boundary leak cleaning is greater than or equal to 7 days. If so, the cleaning robot is controlled to perform a boundary leak cleaning task, which can prevent room boundaries. Accumulation of dirt caused by long-term uncleaning.
- the cleaning robotis controlled to perform the boundary leak cleaning task to improve the cleaning efficiency; the embodiment of the present application controls the cleaning robot to perform the boundary leak cleaning task according to the preset frequency to clean the preset cleaning area, reduce or eliminate room boundaries or Dirt near the outline of obstacles can take into account both cleaning efficiency and cleaning effect.
- the cleaning robotis more intelligent and the user experience is better. For example, the preset frequency of edge trap cleaning tasks may be lower than the frequency of only edge cleaning movements.
- the methodfurther includes: obtaining the object type of the boundary leak cleaning object; and controlling the cleaning robot to perform a boundary leak cleaning task on the preset cleaning area according to the preset frequency, including: Determine a preset frequency corresponding to the object type of the boundary leak cleaning object, and control the cleaning robot to perform a boundary leak cleaning task on the preset cleaning area according to the preset frequency corresponding to the object type.
- Controlling the cleaning robot to perform a boundary leak cleaning task on the preset cleaning areaincludes controlling the cleaning robot to perform boundary leak cleaning on the boundary leak cleaning object, that is, cleaning at least part of the cleaning blind area near the boundary leak cleaning object. . It can be understood that each object type corresponds to a preset frequency, and a boundary leak cleaning object corresponds to at least one object type.
- the boundary leak cleaning objectWhen a boundary leak cleaning object only corresponds to one object type, the boundary leak cleaning object only corresponds to one Preset frequency; when a boundary leak cleaning object corresponds to at least two object types, the boundary leak cleaning object corresponds to at least two preset frequencies, and the boundary leak cleaning object can be cleaned according to at least two different preset frequencies.
- Objectsundergo boundary trap cleaning. For example, if a coffee table has one pair of sides that belong to one object type and the other pair of sides that belongs to another object type, the cleaning robot can perform border leak repair cleaning on the two pairs of sides respectively according to different frequencies. By determining the corresponding preset frequency according to the object type of the boundary leak cleaning object, both the cleaning efficiency of the cleaning robot and the cleaning effect of the preset cleaning area can be taken into consideration.
- the preset frequencyincludes a first preset frequency and a second preset frequency
- the object typesinclude suspended obstacles and non-suspended obstacles.
- suspended obstaclesare invisible to the radar (cannot be observed by the radar), but can trigger changes in the output signal of the collision sensor on the radar, that is, obstacles that can be detected by the collision sensor on the radar, such as those with low spaces at the bottom.
- Bookcases, coffee tables, sofas, etc.for example, it can be determined that the edge of the bottom of the sofa detected by the collision sensor on the radar is a suspended obstacle.
- the cleaning robotwhen the cleaning robot cleans along a suspended obstacle, it can clean the ground along the outer contour of the orthographic projection of the obstacle. At this time, the area near the outer contour of the obstacle is not cleaned.
- the cleaning robotBy controlling the cleaning robot to perform boundary leak cleaning along the suspended obstacle, the cleaning blind area near the outer contour of the suspended obstacle can be reduced or eliminated; the cleaning robot performs boundary leak cleaning along the suspended obstacle, including the cleaning robot along the obstacle.
- the outer contour of the orthographic projectionis used for floor cleaning and leak-proofing cleaning operations at the same time.
- the cleaning range under the suspended obstaclecan be determined based on the output signal of the collision sensor on the radar, or the visual signal of the visual sensor can be combined to determine the outer surface of the suspended obstacle. Clean the blind area near the contour, and control the cleaning robot to clean the determined range.
- non-suspended obstaclesare obstacles that can be observed by radar and may collide with the main body of the cleaning robot, such as a box bed.
- controlling the cleaning robot to perform a boundary leak cleaning task on the preset cleaning area according to the preset frequency corresponding to the object typeincludes: when determining that the boundary leak cleaning object is a suspended obstacle, According to the first preset frequency, the cleaning robot is controlled to perform boundary leak cleaning along the suspended obstacle; when it is determined that the boundary leak cleaning object is a non-suspended obstacle, the cleaning robot is controlled according to the second preset frequency.
- the cleaning robotperforms a boundary leak-filling cleaning task on the non-suspended obstacle.
- the second preset frequencyis different from the first preset frequency.
- the first preset frequencyis higher than the second preset frequency.
- Dirt near suspended obstaclessuch as the bottom edge of the sofa is more likely to be noticed than dirt near non-suspended obstacles.
- cleaning the dirt near suspended obstacles at a higher frequencybetter results can be achieved. cleaning effect; by cleaning dirt near non-suspended obstacles at a lower frequency, cleaning efficiency can be improved.
- the preset frequencyincludes a third preset frequency and a fourth preset frequency
- the object typesinclude discrete obstacles and aggregated obstacles.
- discrete obstaclesrepresent boundary leak cleaning objects with relatively scattered distribution of obstacles.
- Discrete obstaclesare, for example, cartons with no other items around in the living room.
- Aggregated obstaclesrepresent boundary leak cleaning objects with relatively concentrated distribution.
- Aggregated obstaclesare, for example, Obstacle avoidance is required for the table/chair legs of the dining table/chairs clustered together in the kitchen, but is certainly not limited to this.
- controlling the cleaning robot to perform a boundary leak cleaning task on the preset cleaning area according to the preset frequency corresponding to the object typeincludes: when determining that the boundary leak cleaning object is a discrete obstacle, According to the third preset frequency, the cleaning robot is controlled to perform boundary leak cleaning along the discrete obstacles; when it is determined that the boundary leak cleaning object is a gathered obstacle, the cleaning robot is controlled according to the fourth preset frequency.
- the cleaning robotperforms a boundary leak cleaning task on the gathered obstacles.
- the third preset frequency and the fourth preset frequencyare different.
- the third preset frequencyis higher than the fourth preset frequency. Since users may be more sensitive to dirt in cleaning blind areas near discrete obstacles, better cleaning results can be obtained by performing boundary patching cleaning on discrete obstacles at a higher frequency; by cleaning clustered obstacles at a lower frequency Cleaning objects can improve cleaning efficiency.
- the boundary leak cleaning objectcorresponds to at least two of the object types, and one of the object types corresponds to one of the preset frequencies.
- the boundary leak cleaning objectcan correspond to both suspended obstacles and discrete obstacles.
- the suspended obstaclescorrespond to the first preset frequency and the discrete obstacles correspond to the third preset frequency.
- the boundary leak cleaning objectcorresponds to the first preset frequency and the third preset frequency.
- Three preset frequencies. Controlling the cleaning robot to perform a boundary leak cleaning task on the preset cleaning area according to the preset frequency corresponding to the object typeincludes: according to the highest preset frequency among at least two preset frequencies corresponding to the object type. Set the frequency to perform boundary leak repair cleaning on the preset cleaning area.
- the systemis controlled according to the larger preset frequency of the first preset frequency and the third preset frequency.
- the cleaning robotperforms boundary leakage cleaning tasks on boundary leakage cleaning objects. Choosing a more appropriate frequency to perform boundary leak cleaning tasks not only ensures the overall cleaning effect of the room, but also ensures the overall cleaning efficiency of the room and provides a better user experience.
- the methodfurther includes: obtaining the environment type of the area where the boundary leak cleaning object is located; and controlling the cleaning robot to perform a boundary leak cleaning task on the preset cleaning area according to the preset frequency,
- the methodincludes: controlling the cleaning robot to perform a boundary leak-filling cleaning task on the preset cleaning area according to a preset frequency corresponding to the environment type.
- the environment typeincludes but is not limited to at least one of the following: public area, non-public area type, narrow area, and non-narrow area.
- the preset frequencyincludes a fifth preset frequency and a sixth preset frequency
- the environment type of the area where the boundary leak cleaning object is locatedincludes public areas and non-public areas.
- public areascan include living rooms, dining rooms, kitchens, balconies, walkways and other areas shared by members.
- Non-public areasinclude bedrooms, study rooms and other areas with strong privacy. Whether each room is a public area or a non-public area can be determined by the cleaning staff.
- the robotperforms automatic recognition, such as based on the type of furniture, or it can be set by the user.
- controlling the cleaning robot to perform a boundary leak cleaning task on the preset cleaning area according to the preset frequency corresponding to the environment typeincludes: determining that the environment type of the area where the boundary leak cleaning object is located is In a public area, according to the fifth preset frequency, the cleaning robot is controlled to perform a boundary leak-filling cleaning task on the room boundary of the public area and/or the outline of the obstacles in the public area; determine the boundary leak-filling cleaning task
- the environment type of the area where the object is locatedis a non-public area
- the sixth preset frequencythe cleaning robot is controlled to perform boundary execution on the room boundary of the non-public area and/or the outline of the obstacles in the non-public area. Leak cleaning tasks.
- the sixth preset frequencyis different from the fifth preset frequency.
- the fifth preset frequencyis higher than the sixth preset frequency.
- the preset frequencyincludes a seventh preset frequency and an eighth preset frequency
- the environment type of the area where the boundary leak cleaning object is locatedincludes a narrow area and a non-narrow area.
- the cleaning robottravels in a preset area
- the sum of the distances between the cleaning robot and the obstacles and/or room boundaries on its left and right sidesis less than or equal to the predetermined value L0, that is, when l1+l2 ⁇ L0, it is determined
- the preset areais a narrow area; when the sum of the distances between the cleaning robot and the obstacles and/or room boundaries on its left and right sides is greater than the predetermined value, the preset area is a non-narrow area.
- the entire preset cleaning area that the cleaning robot needs to cleanis the narrow area or is a non-narrow area, or some partial areas of the entire preset cleaning area that the cleaning robot needs to clean are the narrow area. , and some partial areas are non-narrow areas.
- controlling the cleaning robot to perform a boundary leak cleaning task on the preset cleaning area according to the preset frequency corresponding to the environment typeincludes: determining that the environment type of the area where the boundary leak cleaning object is located is In a narrow area, according to the seventh preset frequency, the cleaning robot is controlled to perform a boundary leak cleaning task on the room boundary and/or the outline of obstacles in the narrow area; determine the environment of the area where the boundary leak cleaning object is located When the type is a non-narrow area, the cleaning robot is controlled to perform a boundary leak cleaning task on the outline of the room boundary and/or obstacles in the non-narrow area according to the eighth preset frequency. Specifically, the eighth preset frequency is different from the seventh preset frequency.
- the seventh preset frequencyis higher than the eighth preset frequency, that is, the boundary cleaning frequency of the narrow area is higher than the boundary cleaning frequency of the non-narrow area. Since users are highly sensitive to obstacles in narrow areas and/or dirt in cleaning blind areas near room boundaries, cleaning dirt in narrow areas at a higher frequency can achieve a better cleaning effect; by cleaning dirt in narrow areas with a higher frequency; Cleaning dirt in non-narrow areas less frequently can improve cleaning efficiency.
- the area where the boundary leak cleaning object is locatedcorresponds to at least two of the environmental types, and one of the environmental types corresponds to one of the preset frequencies, that is, the area where the boundary leak cleaning object is located corresponds to at least two of the environmental types.
- Preset frequencyfor example, the fifth preset frequency, the sixth preset frequency, the seventh preset frequency, and the eighth preset frequency are different.
- the environment type of the area where the boundary leak cleaning object is locatedmay be both a public area and a narrow area.
- controlling the cleaning robot to perform a boundary leak-filling cleaning task according to the preset frequency corresponding to the environment typeincludes: according to the highest preset frequency among at least two preset frequencies corresponding to the environment type, The cleaning robot is controlled to perform a boundary leak-filling cleaning task on a boundary leak-filling cleaning object in the preset cleaning area.
- the cleaning robotperforms a boundary leak cleaning task on the boundary leak cleaning object of the preset cleaning area, and selects a more appropriate frequency to perform the boundary leak cleaning task. On the one hand, it ensures the overall cleaning effect of the room, and on the other hand, it also ensures that the room The overall cleaning efficiency is better and the user experience is better.
- control methodmay include: obtaining the object type of the boundary leak cleaning object; and obtaining the environment type of the area where the boundary leak cleaning object is located.
- Controlling the cleaning robot to perform a boundary leak cleaning task on the preset cleaning area according to the preset frequencyincludes: determining a preset frequency corresponding to the object type of the boundary leak cleaning object; and determining the boundary The preset frequency corresponding to the environment type of the leak-proof cleaning object in the area; according to the highest preset frequency among the preset frequencies corresponding to the object type and the environment type, the cleaning robot is controlled to perform boundary execution on the preset cleaning area Leak cleaning tasks.
- the boundary leak cleaning objectcorresponds to multiple object types and/or environment types
- the highest preset frequency among the respective corresponding preset frequencies of the multiple object types and/or environment typesis used.
- the boundary trap cleaning objectperforms the boundary trap cleaning task.
- the first preset frequency, the second preset frequency, the third preset frequency, the fourth preset frequency, the fifth preset frequency, the sixth preset frequencyThe frequency, the seventh preset frequency, and the eighth preset frequency are different.
- the preset cleaning areais a narrow area, and the narrow area includes both suspended obstacles and non-suspended obstacles
- the larger preset frequency among the first preset frequency and the seventh preset frequencycan be used.
- Frequencyperform boundary leakage cleaning tasks on the suspended obstacles in the narrow area, and perform cleaning on all the suspended obstacles in the narrow area according to the larger preset frequency of the second preset frequency and the seventh preset frequency.
- the above non-suspended obstaclesperform boundary leakage cleaning tasks.
- the preset cleaning areais a narrow area in a non-public area, and the narrow area includes both suspended obstacles and non-suspended obstacles
- the first preset frequency, the sixth preset frequency and the The larger preset frequency among the seventh preset frequenciesis used to perform a boundary leak cleaning task on the suspended obstacles in the narrow area.
- the sixth preset frequency and the The larger preset frequency among the seventh preset frequenciesis used to perform a boundary leak cleaning task on the non-suspended obstacles in the narrow area.
- the preset frequency of the boundary leak cleaning task of the boundary leak cleaning objectcan be determined according to the multiple types of boundary leak cleaning objects in the room, and the boundary leak cleaning task can be performed on each boundary leak cleaning object according to the determined preset frequency.
- Taskselect a more appropriate frequency to perform boundary leak cleaning tasks for different types of boundary leak cleaning objects in the same room space. On the one hand, it ensures the overall cleaning effect of the room, and on the other hand, it also ensures the overall cleaning efficiency of the room. Boundary leak cleaning cleaning Objects, user experience is better.
- the methodfurther includes: obtaining a working scene of the cleaning robot, and the working scene includes at least one of the following: brushing and cleaning along the inner corner, dragging and cleaning along the inner corner, brushing and cleaning along the outer corner, and cleaning along the outer corner. Mop and clean the outer corners, brush and clean along the column, mop and clean along the column, and mop and clean along the straight line.
- controlling the cleaning robot to perform a boundary leak cleaning taskincludes: selecting a corresponding boundary leak cleaning strategy according to the working scenario of the cleaning robot; controlling the cleaning robot to perform boundary leak cleaning according to the boundary leak cleaning strategy Cleaning tasks.
- the boundary leak-filling cleaning strategyis to control the cleaning robot to perform leak-filling cleaning actions, so as to perform leak-filling cleaning along the edges of the cleaning and leak-filling objects.
- Boundary leakage cleaning strategiesinclude rotation strategy, retreat cleaning strategy, and tangential cleaning strategy.
- the cleaning robotcleans along the inner angle of the room boundary or obstacle (the inner angle can be an inner angle greater than 0 degrees and less than 180 degrees, and the illustration is a 90-degree right angle).
- the cleaning robotcan be controlled to rotate according to the rotation cleaning strategy to bring the air outlet of the fan close to the inner corner.
- the airflow from the air outletwill lift up the dirt at the inner corner, and then the cleaning tool will be swept. Clean up.
- an air outlet for a fanis provided at the rear of the right side of the cleaning robot. The right side of the cleaning robot cleans along the boundaries of the room or the outline of obstacles.
- the cleaning robotWhen cleaning inner corners, the cleaning robot is controlled to rotate counterclockwise in place to Make the airflow from the air outlet blow to the inner corner, and lift the dirt on the ground in the inner corner toward the front of the cleaning robot, so that the cleaning robot's sweeping and vacuuming devices can absorb the dirt.
- the cleaning robotcan be controlled according to the rotation cleaning strategy to travel along the first side of the inner corner, and when traveling to the inner corner and contacting the second side of the inner corner, rotate in situ to at least clean the inner corner. Drag partially and then along the second side of the inside corner.
- the cleaning robotcleans along the outer corner of the room boundary or obstacle (the outer angle can be an outer angle greater than 180 degrees, and the illustration is an outer angle of 270 degrees).
- an optional boundary leak cleaning strategyis a backward cleaning strategy. For example, when the cleaning robot turns from the first side of the outer corner to (such as turning right) the first side of the outer corner. After the two sides, the cleaning robot is controlled to retreat a preset distance before moving forward (shown by the dotted arrow) to clean the missed area when turning.
- Another optional boundary leak cleaning strategyis to turn the cleaning robot to the second side of the outer corner (such as turning right) before turning from the first side of the outer corner to the second side of the outer corner.
- the predetermined distancecan be equal to or known to be equal to the radius of the cleaning robot; and then the cleaning robot is controlled to turn in place (such as turning around a certain point between the running wheels). ), and then control the cleaning robot to move along the second side of the outer corner so that the brushing element contacts the second side of the outer corner.
- an optional boundary leak cleaning strategyis a backward cleaning strategy, for example, when the cleaning robot turns from the first side of the outer corner to the second side of the outer corner (such as Before turning left), the cleaning robot is controlled to advance a preset distance and then retreat a preset distance to complete the leak-repairing and sweeping action.
- Another optional edge patching cleaning strategyis turning patching, which is the same as turning patching when cleaning by brushing along the outside corners with a brushing piece, and will not be discussed again here.
- FIG 21The cleaning robot brushes and cleans along the columnar body.
- Figure 22The cleaning robot mops and cleans along the columnar body.
- the gray ring surrounding the columnar bodyrepresents the cleaning blind area, such as the missed scanning area, in which the columnar body includes but does not Limited to cylinders, table legs, and chair legs.
- Figure 23shows the boundary leakage cleaning strategy corresponding to the working scenario of brushing cleaning along the columnar body or dragging cleaning along the columnar body in one embodiment. It can be called a tangential cleaning strategy, for example, controlling the cleaning robot to move along the tangential direction of the cylinder.
- the methodfurther includes: obtaining a cleaning task map; controlling the cleaning robot to clean the preset cleaning area at least through a dragging member according to the cleaning task map; and after determining that the boundary is satisfied.
- the cleaning robotis controlled to perform the boundary leakage cleaning task according to at least one of the preset frequencies; when a carpet is detected, the cleaning robot is controlled to explore the carpet along the edge to obtain the carpet. According to the outline of the carpet, add the carpet area corresponding to the carpet in the cleaning task map.
- the cleaning robotcan first be controlled according to the cleaning task map to mop (or brush and mop at the same time) non-carpet areas in the preset cleaning area.
- the cleaning robotcan also be controlled according to at least A preset frequency controls the cleaning robot to perform a boundary leak cleaning task to clean at least part of the cleaning blind area;
- the carpetcan be detected when cleaning the non-carpet area, for example, the carpet is detected through a sensor unit, and when the carpet is detected Control the cleaning robot to explore the carpet along the edge, determine the carpet area corresponding to the carpet, and update the carpet area into the cleaning task map.
- the methodfurther includes: when carpet cleaning conditions are met, controlling the cleaning robot to clean the carpet in the carpet area by using a brush according to the carpet area in the cleaning task map. For example, after all non-carpet areas in the cleaning task map have been mopped, or all non-carpet areas in the preset cleaning area have been cleaned, it is determined that the carpet cleaning conditions are met, and the cleaning robot is controlled.
- the carpet in the carpet areais cleaned by means of a brush.
- the carpet cleaning switcha button on the base station/cleaning robot, or a virtual switch on the user terminal
- the brush sweepercleans the carpet in the carpet area.
- the cleaning all non-carpet areasperform maintenance on the mop element, such as cleaning the mop element and drying it, and then clean the carpet in the order of cleaning the carpet area. Clean the carpet after the mop is dry to avoid wetting the carpet.
- the control method of a cleaning robotincludes: obtaining one or at least two preset frequencies of a boundary leak cleaning task, and controlling the cleaning robot to perform boundary cleaning on the preset cleaning area according to the preset frequencies.
- Leak cleaning tasksBy controlling the cleaning robot to perform boundary leak-filling cleaning tasks, the cleaning effect of the preset cleaning area can be improved.
- By controlling the cleaning robot to perform boundary leak-filling cleaning tasks according to the preset frequencyboth cleaning efficiency and cleaning effect can be taken into account.
- the cleaning robotis more intelligent and the user experience is better. .
- FIG. 24is a schematic block diagram of the control device 300 provided by the embodiment of the present application.
- the control device 300includes a processor 301 and a memory 302.
- processor 301 and the memory 302are connected through a bus 303, such as an I2C (Inter-integrated Circuit) bus.
- bus 303such as an I2C (Inter-integrated Circuit) bus.
- the processor 301may be a micro-controller unit (Micro-controller Unit, MCU), a central processing unit (Central Processing Unit, CPU) or a digital signal processor (Digital Signal Processor, DSP), etc.
- MCUMicro-controller Unit
- CPUCentral Processing Unit
- DSPDigital Signal Processor
- the memory 302may be a Flash chip, a read-only memory (ROM, Read-Only Memory) disk, an optical disk, a U disk or a mobile hard disk, etc.
- ROMRead-Only Memory
- the memory 302may be a Flash chip, a read-only memory (ROM, Read-Only Memory) disk, an optical disk, a U disk or a mobile hard disk, etc.
- the processor 301is configured to run a computer program stored in the memory 302, and implement the steps of the cleaning robot control method of any of the foregoing embodiments when executing the computer program.
- the robot controller 104 of the cleaning robot 100 and/or the base station controller 206 of the base station 200can be used as the control device 300 alone or in combination to implement the cleaning robot according to the embodiment of the present application.
- the control device 300can be provided on the cleaning robot 100, or It can be set on the base station 200; of course, it is not limited thereto.
- the control device 300can be a device other than the cleaning robot 100 and the base station 200, such as a home smart terminal, a master control device, etc.
- control device 300 on the base station 200such as the base station controller 206
- the control device 300 on the cleaning robot 100such as the robot
- the controller 104is used to implement the steps of any cleaning robot control method in the embodiment of the present application; of course, it is not limited thereto.
- control device 300 on the base station 200can be used to implement the control method of the cleaning robot in the embodiment of the present application. A step of.
- the embodiment of the present applicationalso provides a base station, which is at least used to clean the mopping parts of the cleaning robot.
- the base stationalso includes a control device 300, such as the base station controller 206, for implementing the implementation of the present application. The steps of the control method of the cleaning robot are shown in the example.
- the embodiment of the present applicationalso provides a cleaning robot, which includes a control device 300, such as the robot controller 104, for implementing the steps of the control method of the cleaning robot in the embodiment of the present application.
- a control device 300such as the robot controller 104
- Figure 2is a schematic diagram of a cleaning system provided by an embodiment of the present application.
- the cleaning systemincludes:
- the cleaning robot 100includes a walking unit 106 and a mopping part 110, and may also include a brushing and sweeping part 120.
- the walking unit 106is used to drive the cleaning robot 100 to move so that the mopping part 110 mops the ground; the brushing and sweeping part
- the component 120includes a side brush component 121 and/or a middle sweep component 122;
- the base station 200is at least used to clean or replace the mopping member 110 of the cleaning robot 100; and/or the base station 200 includes a dirt detection device to detect the degree of dirt of the mopping member 110 of the cleaning robot 100; and
- Embodiments of the present applicationalso provide a computer-readable storage medium.
- the computer-readable storage mediumstores a computer program.
- the processorcan implement the steps of the method of any of the above embodiments. .
- the computer-readable storage mediummay be an internal storage unit of the control device described in any of the preceding embodiments, such as a hard disk or memory of the control device.
- the computer-readable storage mediummay also be an external storage device of the control device, such as a plug-in hard disk, a smart memory card (Smart Media Card, SMC), or a secure digital (SD) equipped on the control device. ) card, Flash Card, etc.
- Cleaning equipmentsuch as cleaning robots
- the application scenarioscan be household indoor cleaning, large-scale place cleaning, etc.
- cleaning equipmentcannot detect the degree of dirt on the cleaned floor when cleaning the floor, and cannot reflect the cleaning workload of the cleaning equipment, thereby affecting the user's experience of using the cleaning equipment.
- FIG. 25is a schematic flowchart of a method for processing images cleaned by a cleaning device according to an embodiment of the present application.
- the method for processing cleaning images of cleaning equipmentcan be applied in a cleaning equipment system to generate and display cleaning images of cleaning equipment in the system, so as to visualize the cleaning workload of the cleaning equipment.
- the preset cleaning areacan be any area to be cleaned such as a family space, a room unit of a family space, a part of a room unit, a large place, or a part of a large place. From another perspective, the preset cleaning area can refer to the larger area that is cleaned for the first time, such as the entire room unit; it can also refer to the area that needs to be cleaned after the first cleaning of the larger area, such as the wall area in the room unit. , or obstacle area.
- a cleaning equipment system(or may be called a cleaning system or a cleaning robot system) includes one or more cleaning equipment 100 , one or more base stations 200 , and a processing device 300 .
- the cleaning device 100includes a movement mechanism and cleaning parts.
- the movement mechanism of the cleaning equipment 100is used to drive the cleaning equipment 100 to move so that the cleaning parts clean the preset cleaning area.
- the movement mechanismis, for example, a walking unit, and the walking unit is used to drive the cleaning robot to move.
- the motion mechanismdrives the cleaning device 100 to move, the cleaning parts contact the preset cleaning area to clean the preset cleaning area during the movement of the cleaning device 100 .
- the base station 200is used in conjunction with the cleaning device 100.
- the base station 200can charge the cleaning device 100, the base station 200 can provide a docking location to the cleaning device 100, and so on.
- the base station 200can also clean the cleaning parts of the cleaning device 100 .
- the cleaning equipment systemincludes one or more cleaning equipment 100 and a processing device 300 .
- the cleaning device 100includes a movement mechanism, cleaning parts and a maintenance mechanism.
- the movement mechanismis used to drive the cleaning equipment 100 to move so that the cleaning parts clean the preset cleaning area
- the maintenance mechanismis used to clean the cleaning parts.
- the processing device 300may be used to implement the steps of the method for processing a cleaning image by a cleaning device according to the embodiment of the present application.
- the cleaning device 100is provided with a device controller for controlling the cleaning device 100
- the base station 200is provided with a base station controller for controlling the base station 200
- the device controller of the cleaning device 100 and/or the base station controller of the base station 200can serve as the processing device 300 alone or in combination, for implementing the steps of the cleaning image processing method of the cleaning device according to the embodiment of the present application; in other embodiments, the cleaning equipment system includes a separate processing device 300 for implementing the steps of the cleaning device cleaning image processing method of the embodiment of the present application.
- the processing device 300may be disposed on the cleaning device 100 , or may be disposed on the cleaning device 100 .
- the base station 200of course, it is not limited to this.
- the processing device 300can be a device other than the cleaning device 100 and the base station 200, such as a home smart terminal, a master control device, etc.
- the cleaning device 100can be used to automatically clean a preset cleaning area.
- the application scenarios of the cleaning device 100can be household indoor cleaning, large-scale place cleaning, etc.
- the cleaning components of the cleaning device 100include at least one of a mopping component and a vacuum suction component, and are certainly not limited thereto.
- the cleaning equipment 100 or the base station 200further includes a dirt detection device, and the dirt detection device is used to detect the dirt degree of the cleaning parts.
- the dirt detection deviceincludes at least one of the following: a visual sensor and a sewage detection sensor.
- the image or color information of the cleaning piececan be obtained according to the visual sensor, and the image or color information of the cleaning piece can be determined based on the image or color information of the cleaning piece. The degree of dirtiness.
- the distance between the dirt inside a cleaning piece such as a dust collector and the dust collectoris The closer the edge is, the more soiled the vacuum cleaner will be.
- the sewage detection sensorcan obtain detection information of sewage obtained by cleaning cleaning parts such as mopping parts, and the degree of contamination of the mopping parts of the cleaning parts can be determined based on the obtained detection information; optionally, the sewage detection sensor includes at least the following One: visible light detection sensor, infrared detection sensor, total dissolved solids detection sensor; for example, the infrared detection sensor collects the turbidity value of sewage, the visible light detection sensor collects the chromaticity value of sewage, and the total dissolved solids detection sensor Collect the water conductivity value of sewage; the degree of dirtiness of the mopping parts can be determined based on one or more of the turbidity value, chromaticity value, and water conductivity value; for example, the greater the turbidity value of the sewage, the greater the water conductivity value. The greater the conductivity, the greater the degree of dirt on the mopping parts.
- the method of determining the degree of contamination of the cleaning parts of the cleaning device 100is not limited to this, and is
- the cleaning image processing method of the cleaning equipmentis used to generate a cleaning image after the cleaning equipment completes cleaning of one or at least two preset cleaning areas through cleaning parts.
- the methodincludes the steps S110 to step S120.
- Step S110After the cleaning equipment cleans a preset cleaning area once using a cleaning piece, obtain the degree of dirt corresponding to the preset cleaning area.
- the preset cleaning areamay be an area to be cleaned divided by the cleaning device based on a task map.
- the task mapcan be established by the cleaning equipment by exploring the current space in response to the mapping instruction, or it can be updated by the cleaning equipment based on obstacles, carpets, etc. identified during the cleaning process; optionally, the task map The map may be a map of a cleaning area specified by the user, for example, in response to the user selecting a cleaning area such as one or more rooms on the map, determining the one or more rooms as a task map, or in response to the user circling the map.
- the cleaning areais, for example, a partial area of one or more rooms, and the partial area of one or more rooms is determined as a task map, and is certainly not limited to this.
- the preset cleaning areamay be determined based on the room in the task map and/or the workload threshold of the cleaning equipment.
- the workload of each preset cleaning areais less than or equal to the workload threshold, where the workload threshold is used to instruct the cleaning equipment to interrupt the current operation before completing the workload corresponding to the workload threshold. Cleaning tasks and movement to the base station for maintenance.
- Cleaning tasksrefer to tasks in which the cleaning equipment responds to cleaning instructions to clean all preset cleaning areas corresponding to the task map; for example, a room can be a preset cleaning area, or a room There are multiple preset cleaning areas; certainly not limited thereto, for example, a preset cleaning area includes one room and at least part of another room.
- the preset cleaning areacan be determined based on the user's division on the task map, or the division can be determined based on preset area division rules.
- obtaining the degree of contamination corresponding to the preset cleaning areaincludes: after the cleaning device completes cleaning of the preset cleaning area through the cleaning piece, obtaining the degree of contamination of the cleaning piece. ; and, determining the degree of dirt corresponding to the preset cleaning area according to the degree of dirt of the cleaning parts. For example, after the cleaning device completes cleaning the preset cleaning area by using the mopping member, the degree of contamination of the mopping member is obtained.
- the cleaning componentincludes a mopping component.
- the mopping partsuch as a mop
- the mopstarts mopping from the moment it is washed until the dirt value of the mopping part reaches the maximum.
- the cleaning robotmoves forward at a constant speed and does not repeatedly mop a piece.
- the dirtis uniformly distributed on the ground (the area is infinite)
- the relationship between the amount of dirt collected by the mop piece, that is, the dirt value d of the mop piece and the mopping timeis shown in Figure 28.
- the cleaning equipmentcan also be controlled to move to the base station for maintenance, such as cleaning the mopping parts, replacing the cleaned mopping parts, or controlling the maintenance of the cleaning equipment.
- the organizationmaintains the cleaning equipment, such as cleaning the mop parts or replacing the cleaned mop parts.
- the maximum dirt value d_max of the mopping partis an empirical value, which can be measured in a laboratory, for example.
- the cleaning componentincludes a dust suction component.
- the vacuum cleanerhas a certain dirt holding space. When the amount of dirt sucked by the vacuum cleaner reaches the maximum dirt holding space, the vacuum cleaner will no longer be able to suck in more dirt, which will affect the ground. The vacuum cleaning effect is also very poor.
- the maximum amount of dirt on the dust collectoris an empirical value, which can be measured in a laboratory, for example.
- the dirt value corresponding to the preset cleaning areais positively correlated with the dirt value of the mopping part, that is, the greater the dirt value of the mopping part, the greater the dirt value of the mopping part.
- the degree of dirt corresponding to the preset cleaning areais positively related to the degree of dirt of the dust collector, that is, the degree of dirt of the dust collector is The greater the degree of contamination, the dirtier the preset cleaning area; when the amount of dirt inhaled by the vacuum cleaner is equal to the maximum amount of dirt of the vacuum cleaner, it can be determined that the preset cleaning area is very dirty, and it is more likely to complete the preset cleaning area. It is assumed that after cleaning the cleaning area, for example, after completing the vacuuming of the preset cleaning area, there is still dirt in the preset cleaning area that has not been sucked in by the dust collector.
- the degree of contamination of the preset cleaning areamay be determined based on the degree of contamination of the mopping member and/or the degree of contamination of the vacuum suction member.
- the dirt level of the cleaning pieceis obtained through a dirt detection device on the base station or cleaning equipment, such as a visual sensor.
- a dirt detection device on the base station or cleaning equipmentsuch as a visual sensor.
- the darker the color of the mopping piecethe greater the dirt level of the mopping piece.
- itcan also be obtained through the visual sensor mounted on the cleaning equipment and facing the mop member.
- the degree of contamination of the mopping part, or the degree of contamination of the cleaning part of the cleaning devicecan be obtained through a visual sensor mounted on the cleaning device and facing the inside of the suction part to determine the degree of contamination of the cleaning part of the cleaning device.
- obtaining the degree of contamination of the cleaning partincludes: when cleaning the mopping part, obtaining detection information of sewage used to clean the mopping part; and determining the degree of contamination of the mopping part based on the detection information.
- the dirt detection deviceincludes a sewage detection sensor.
- the sewage detection sensoris used to detect sewage after cleaning the mop piece, such as detecting one or more of the turbidity information, color information, and water conductivity information of the sewage.
- the amount of dirt removed from the mop elementcan be determined by the turbidity value of the wastewater, the colorimetric value of the wastewater or the water conductivity of the wastewater.
- the turbidity, color or water conductivity of the sewagewhen the turbidity, color or water conductivity of the sewage is greater, it means that the sewage after cleaning the mop parts is dirtier, and the amount of dirt cleaned from the mop parts is larger, which is used to indicate the amount of dirt removed from the mop parts.
- the turbidity value of sewage, the chromaticity value of sewage, and the water conductivity of sewagecan all be used to characterize the amount of dirt cleaned from the mop parts, that is, it can characterize the degree of dirt of the mop parts, and they are all related to the dirt.
- the dirt elution value, dirt amount or dirt degreeare positively correlated or have a corresponding relationship.
- the turbidity value detected for the sewage from cleaning the mop for the first timeis 1 NTU
- the turbidity value corresponding to 1 NTUis 100.
- the turbidity value detected for the sewage from the second cleaning mopis 1 NTU.
- the dirt elution value or the amount of dirt corresponding to the sewage with a turbidity value of 2NTU and a turbidity value of 2NTUis 200. It can be judged that the amount of dirt cleaned from the mop part for the first time is less than that from the mop piece for the second time. The amount of dirt washed off the wiping parts, that is, the degree of dirt on the wiping parts cleaned for the first time is less than the dirtiness of the wiping parts cleaned for the second time.
- the corresponding relationship between the chromaticity value of sewage, the water conductivity of sewage and the dirt elution value or dirt amountis the same, and will not be repeated here.
- the degree of contaminationcan be represented by a numerical value, such as by any of the turbidity value of the sewage, the chromaticity value of the sewage, the water conductivity of the sewage, the amount of dirt, and the dirt elution value.
- the degree of dirtinesscan be determined by any one of the turbidity value of the sewage, the colorimetric value of the sewage, the water conductivity of the sewage, the amount of dirt, and the dirt elution value.
- the turbidity value of the sewage after cleaning the mop partsis 1 NTU, it can indicate that the degree of dirtiness of the mop parts is 1; or if the turbidity value of the sewage after cleaning the mop parts is 1 NTU, the corresponding degree of dirtiness is 100 , then the degree of dirtiness of the mopping part is 100.
- the detection value of the sewage detection sensorcan be obtained at intervals, and the dirt corresponding to the detection value can be calculated based on the time and/or the amount of water used to clean the mop member.
- the amountis accumulated to obtain an accumulated result of the amount of dirt, where the amount of water can be determined based on the amount of cleaning water provided to the cleaning tank and/or the amount of waste water discharged.
- a mopping element cleaning operation performed between two floor cleaning operationscan be used as a mopping element cleaning task.
- the cleaning task of cleaning the mopping elementincludes, for example, a process of cleaning the mopping element after cleaning a preset cleaning area and before cleaning another preset cleaning area, and may also include ending the cleaning task. There is then a process of cleaning the mopping parts, wherein the condition for ending the cleaning task is to determine that the dirt values of all areas of the task map are less than the corresponding dirt amount thresholds.
- the cleaning task of the mopping partincludes one or more stage tasks. At each stage of the task, clean water is provided to the cleaning tank of the base station or directly to the cleaning of the mopping parts to clean the mopping parts, and then the sewage after cleaning the mopping parts is discharged from the cleaning tank or recycled into the sewage tank, in which the sewage
- the tankcan be a sewage tank installed on the base station or the cleaning robot. This process does not need to be circulated or can be circulated multiple times; or at the same time, clean water is supplied to clean the mop parts and the sewage after cleaning the mop parts is discharged or recycled. Of course, It is not limited to this. For example, when cleaning water is provided to the cleaning tank, the sewage after cleaning the mop member is intermittently discharged.
- the time and/or amount of water required to clean the mopping part corresponding to tasks in different stagesmay be the same or different. According to the time and/or amount of water corresponding to one or more stage tasks in the task of cleaning the mopping part, the tasks in each stage are The amount of dirt corresponding to the detection value obtained during execution is accumulated to obtain the accumulated result of the amount of dirt.
- Determining the degree of dirt of the mopping part according to the detection informationincludes: accumulating the amount of dirt corresponding to the detection information according to the time and/or the amount of water used to clean the mopping part, wherein the amount of water can be based on the amount of water provided to the cleaning tank.
- the amount of water usedis determined by the amount of water used and/or the amount of waste water discharged.
- the detection informationsuch as sewage turbidity
- the detection informationsuch as sewage turbidity
- the detection informationsuch as sewage turbidity
- the detection informationsuch as sewage turbidity
- the detection informationsuch as sewage turbidity
- the detection informationsuch as sewage turbidity
- the detection informationsuch as sewage turbidity
- the detection informationsuch as sewage turbidity
- the detection informationsuch as sewage turbidity
- the detection informationsuch as sewage turbidity
- the detection informationsuch as sewage turbidity
- the detection informationsuch as sewage turbidity
- the cumulative result d of the dirt amountcan be determined based on the detection information of one or more samples and the water volume in the sampling interval, which is expressed as follows:
- Tirepresents the sewage turbidity T of the i-th sampling
- l irepresents the water volume between two samplings
- iis any value among 1, 2,..., n
- nis the total number of samplings.
- determining the degree of contamination of the mopping element based on the detection informationincludes: predicting the degree of contamination of the mopping element based on the single detection information. For example, after stopping the supply of clean water to the cleaning tank, the sewage is discharged, and the sewage turbidity is detected once during the sewage discharge process, and the water volume of the discharged sewage is obtained. The product of the sewage turbidity and the water volume can be determined as The cumulative result of the amount of dirt d. Of course, it is not limited to this.
- the turbidity of the sewagecan be detected multiple times during the sewage removal process, and the product of the average, maximum, or minimum value of the multiple detected turbidities of the sewage and the amount of water is determined as the amount of dirt. Accumulated result d.
- the amount of dirt corresponding to the detection informationis accumulated according to the time and/or amount of water used to clean the mopping member, and the accumulated result of the amount of dirt represents the amount of dirt cleaned from the mopping member.
- the amount of dirtcan be called the dirt elution value.
- the dirt elution value of the mopping part cleaning taskmay be determined based on the dirt elution values of one or more stages of the mopping part cleaning task; for example, the mopping part cleaning task The dirt elution values of all stages of the cleaning task are accumulated to obtain the dirt elution value of the mopping part cleaning task.
- the detection information of sewagecan be obtained only once, or the detection information of sewage can be obtained multiple times, and the dirt elution value of the stage task is determined based on one or more detection information, for example, based on multiple detection information
- the product of the average value of the detection information and the water volume of the task stagedetermines the dirt elution value of the task in this stage.
- the degree of contamination of the mopping partmay be determined based on the dirt elution value of one or more stage tasks, or the dirt elution value of the mopping part cleaning task.
- the degree of dirt of the mopping partis determined based on the dirt elution value of the first stage task in the mopping part cleaning task.
- the greater the dirt elution value of the first stage taskthe greater the dirt elution value of the first stage task.
- the greater the dirtiness value of the mopping part; or the degree of dirtiness of the mopping partis determined based on the maximum or average value of the dirt elution values of multiple stages of tasks. The greater the maximum or average value, the greater the degree of dirtiness of the mopping part.
- the greater the dirtiness value of the mopping partsis determined based on the dirt elution value of one or more stage tasks, or the dirt elution value of the mopping part cleaning task.
- the mopping member cleaning taskis performed, and the dirt in all stages of the mopping member cleaning task is washed away.
- the valuesare accumulated to obtain the dirt elution value of the mopping part cleaning task, and the dirt elution value of the mopping part cleaning task is determined as the degree of dirt corresponding to the preset cleaning area.
- Step S120Generate a cleaning image according to the degree of dirt corresponding to one or at least two preset cleaning areas.
- the step of generating a cleaning image according to the degree of dirtiness corresponding to the preset cleaning areafurther includes: determining a preset cleaning area with a degree of dirtiness greater than or equal to a preset degree of dirtiness threshold; Or a preset clean area equal to the preset dirtiness threshold to generate a clean image. For example, if after the cleaning device cleans multiple preset cleaning areas, there is at least one preset cleaning area with a degree of contamination less than the preset contamination degree threshold, then the cleaning image may not contain the degree of contamination that is less than the preset degree of contamination.
- the preset cleaning area with a dirty degree thresholdis displayed, so as to more intuitively reflect the cleaning effect of the cleaning equipment on the preset cleaning area.
- the cleaning imagemay be generated after the cleaning equipment completes cleaning of all preset cleaning areas in the task map, or may be generated after the cleaning equipment completes one cleaning of at least one preset cleaning area in the task map.
- Clean imagesare not limited here.
- the cleaning imageincludes an image area corresponding to a preset cleaning area.
- generating a clean image based on the degree of dirt corresponding to the preset cleaning areaincludes: determining the target filling icon of the image area according to the value range of the degree of dirt corresponding to the preset cleaning area; and determining the target filling icon according to the target filling icon.
- the image areais marked, and the target filling icons corresponding to different value ranges are also different.
- the target fill iconmay include at least one of color, line, shadow, pattern, numerical value or other fill icon.
- the target filling iconmay be preset or may be set by the user, which is not limited here. It will be understood that the target fill icon can be expanded accordingly.
- the value range of the degree of contamination corresponding to the preset clean areais determined, and the target filling icon of the image area is determined based on the value range of the degree of contamination corresponding to the preset clean area.
- the presetIt is assumed that the higher the degree of dirt corresponding to the clean area, the darker the color in the target fill icon; the higher the degree of dirt corresponding to the preset clean area, the denser the lines in the target fill icon; the darker the color corresponding to the preset clean area.
- determining the target filling diagram of the image area according to the value range of the degree of dirt corresponding to the preset cleaning areaincludes: when the number of times the preset cleaning area is cleaned is greater than 1 time, according to The value range of at least one degree of dirt corresponding to the preset cleaning area determines the target filling diagram of the image area corresponding to the preset area.
- the degree of dirt corresponding to the preset cleaning areacan be obtained.
- the degree of contamination corresponding to the preset cleaning areacan be obtained every time.
- the preset cleaning areahas been cleaned 5 times.
- a degree of dirtinesswill be obtained, that is, 5 degrees of dirtiness are obtained.
- the target filling icon of the image area corresponding to the preset areais divided into 5 degrees of dirtiness. Determined by any one of , or by the cumulative value of at least 2 of the 5 soiling levels.
- the preset cleaning areahas been cleaned 5 times, and the dirtiness level is obtained only after 2 cleanings.
- 2 dirtiness levelsare obtained
- the target filling icon of the image area corresponding to the preset areais represented by 2 Determined by any one of two soiling levels, or by the cumulative value of 2 soiling levels.
- the remaining cleaning times of the preset cleaning areacan be predicted based on the degree of contamination corresponding to the preset cleaning area. For example, the remaining number of cleanings is 4 times.
- the cleaning areais When the estimated number of remaining cleanings is greater than one, the degree of dirtiness of the preset cleaning area after only a few cleanings can be obtained to generate a cleaning image.
- the degree of contamination of the preset cleaning area corresponding to each cleaningmay also be obtained based on the actual number of cleanings, and a cleaning image may be generated based on the degree of contamination of the preset cleaning area corresponding to each cleaning.
- generating a cleaning image according to a degree of dirt corresponding to a preset cleaning areaincludes: generating a first cleaning image according to a degree of dirt corresponding to a first target preset cleaning area, wherein the first target preset The cleaning area is one preset cleaning area among at least two preset cleaning areas, the first cleaning image includes all image areas corresponding to the preset areas, and at least the image area corresponding to the first target preset cleaning area A target filling icon is identified, and the target filling icon is determined according to the degree of dirt corresponding to the most recently obtained first target preset cleaning area.
- the processing methodfurther includes: the image area corresponding to the non-first target preset cleaning area does not identify the target filling icon; or the image area corresponding to the non-first target preset cleaning area identifies the preset target filling icon; Or the target filling icon of the image area corresponding to the non-first target preset cleaning area is determined according to the degree of dirt corresponding to the most recently acquired non-first target preset cleaning area; wherein the non-first target preset cleaning area is except A preset cleaning area outside the first target preset cleaning area.
- each preset cleaning areacorresponds to the image area in the clean image one-to-one.
- the preset cleaning area A1corresponds to the image area a1
- the preset cleaning area A2corresponds to the image area a2, and so on.
- the cleaning equipmentfirst cleans the preset cleaning area A1.
- the first target cleaning areais the preset cleaning area A1
- the first cleaning image aincludes all image areas a1-a4 corresponding to the preset cleaning areas A1-A4, and the image area a1 corresponding to the preset cleaning area A1 has color Filling, the color of the filling of the image area a1 is determined by the degree of dirt corresponding to the preset cleaning area A1.
- the image areas a2-a4 corresponding to the non-first target cleaning areas A2-A4do not identify the target filling.
- a first cleaning image bcan be generated according to the degree of dirt corresponding to the preset cleaning area A2.
- the first target cleaning areais the preset cleaning area A2
- the first cleaning image bincludes all image areas a1-a4 corresponding to the preset cleaning areas A1-A4.
- the preset cleaning areaThe image area a1 corresponding to A1 is filled with color, and the image area a2 corresponding to the preset cleaning area A2 is filled with color.
- the color filled in the image area a1is determined by the degree of dirt corresponding to the preset cleaning area A1 obtained last time, that is, the first
- the color filled in the image area a1 in the clean image bis the same as the color filled in the image area a1 in the first clean image a.
- the color filled in the image area a2is determined by the degree of dirt corresponding to the preset cleaning area A2.
- the corresponding colors of A3 and A4are Image areas a3 and a4 do not identify target filling icons.
- the image areas corresponding to the non-first target areas in the first cleaning image a and the first cleaning image bmay not be marked with any target filling icon, or may be marked with a preset marked filling icon, which is not limited here.
- the first cleaning image bretains the target filling icon identified by the image area a1 corresponding to the preset cleaning area A1 in the first cleaning image a, and the preset cleaning area A1 and the preset cleaning area A2 are tasks.
- the degree of dirtiness corresponding to the preset cleaning area A2will not affect the degree of dirtiness corresponding to the preset cleaning area A1. Therefore, in the first cleaning image b, the target filling map identified by the image area a2 means that it will not affect the target fill pattern identified in the image area a1.
- the target fill pattern identified in the image area a1 in the first cleaning image bis the same as the target fill pattern identified in the image area a1 in the first cleaning image a.
- a first cleaning image ccan be generated according to the degree of dirt corresponding to the preset cleaning area A3, as shown in Figure 30(c)
- a first cleaning image dcan be generated according to the degree of dirt corresponding to the preset cleaning area A4, as shown in Figure 30(d).
- the first cleaning imageis generated when the degree of dirt corresponding to the first target preset cleaning area is obtained, that is, every time a cleaning of a preset cleaning area is completed (that is, every time a dirt detection is completed)
- a first cleaning imageis displayed.
- the first cleaning image a, the first cleaning image b, the first cleaning image c, and the first cleaning image dare respectively completed in the preset cleaning areas A1, A2, A3, and A4. It is displayed after one cleaning; in some embodiments, a first cleaning image is generated after completing the cleaning task. For example, only a first cleaning image is displayed after completing the cleaning task, such as by clicking on the corresponding label in the screen. The first cleaning image is selectively displayed, as shown in Figure 31.
- the usercan select to display any one of the first cleaning images a-d by clicking any label on the screen as shown in numbers 1 to 5 in Figure 31.
- Zhangin some embodiments, after completing the cleaning task, at least two first cleaning images are generated sequentially or simultaneously, for example, after completing the cleaning task, at least two first cleaning images are displayed sequentially or simultaneously, and after completing the cleaning task,
- the usercan selectively display the corresponding first cleaning image by clicking at least two labels in the screen, as shown in Figure 31 as numbers 1 to 5, or as shown in Figure 32, the user can click in the screen
- the icon "Clean Image"allows multiple first cleaning images to be displayed in sequence, or as shown in Figure 33, multiple first cleaning images are displayed on the screen by clicking the icon on the screen.
- the cleaning process of the cleaning equipmentcan be reflected based on at least one first cleaning image.
- the actual cleaning sequence of each preset cleaning area by the cleaning equipment and the corresponding degree of dirt of each preset cleaning areacan be reflected, for example, in Figure 30
- the first cleaning image areflects that the cleaning equipment first starts to clean the preset cleaning area A1
- the target filling icon identified by the image area a1reflects the degree of dirt of the preset cleaning area A1 before cleaning
- the cleaning equipmentperforms the preset cleaning at that time.
- the cleaning equipmentwhen the cleaning equipment performs a cleaning task, the cleaning equipment cleans each preset cleaning area A1, A2, A3, and A4 in the cleaning order of A1-A2-A3-A4.
- the cleaning of each preset cleaning areaThe order is not limited to this.
- the cleaning order of A1-A2-A3-A4will be explained below. Referring to Figure 34, the cleaning equipment first cleans the preset cleaning area A1 once. Then, based on the degree of dirt corresponding to the preset cleaning area A1 obtained by the cleaning equipment after cleaning the preset cleaning area A1, a A first cleaning image a, as shown in Figure 34(a).
- the preset cleaning area A1is the first target cleaning area
- the first cleaning image aincludes all image areas a1- corresponding to the preset cleaning areas A1-A4. a4, and the image area a1 corresponding to the preset cleaning area A1 is filled with color.
- the color filled in the image area a1is determined by the degree of dirt corresponding to the preset cleaning area A1; if this cleaning of the preset cleaning area A1 is completed, the cleaning The equipment also needs to continue to clean the preset cleaning area A1 for the second time. At this time, the preset cleaning area A1 is still the first target cleaning area.
- the degree of dirt corresponding to the preset cleaning area A1 after the second cleaningGenerate a first cleaning image b, as shown in Figure 34(b).
- the first cleaning image bcontains all image areas a1-a4 corresponding to the preset cleaning areas A1-A4, and the image area a1 corresponding to the preset cleaning area A1
- the color of the fillingis determined by the degree of dirt corresponding to the preset cleaning area A1 obtained for the second time.
- the changes in the cleaning effect of the areacan reflect that the preset cleaning area A1 has been cleaned twice, and the target filling diagram is marked by the image cleaning area a1.
- the changereflects the change in the cleaning effect of the preset cleaning area A1.
- the cleaning equipmentif the cleaning equipment completes cleaning a preset cleaning area, that is, after the degree of dirt corresponding to the preset cleaning area is lower than the preset dirt level threshold, the cleaning equipment continues to clean other preset cleaning areas. Clean, and generate at least one first cleaning image according to the degree of dirt corresponding to other preset cleaning areas.
- the degree of dirt corresponding to the preset cleaning area A1is lower than the preset dirt level threshold, and the cleaning equipment continues to clean the preset cleaning area A2.
- the preset cleaning area A2is the first target cleaning area, and the first cleaning image d can be generated according to the degree of dirt of the preset cleaning area A2, as shown in Figure 34(d), and so on, according to the cleaning equipment.
- the degree of contamination of the area A3 and the preset cleaning area A4respectively generates at least one first cleaning image, so that the cleaning process of the cleaning equipment can be reflected based on the at least one first cleaning image, such as the cleaning of each preset cleaning area by the cleaning equipment.
- the preset cleaning areas A2-A4are non-first target areas, and the image areas a2-a4 corresponding to the preset cleaning areas A2-A4 do not identify target filling icons to indicate the preset cleaning areas A2-A4.
- the preset cleaning area A1is a non-first target area
- the target filling icon filled in the image area a1 corresponding to the preset cleaning area A1is the same as the first cleaning
- the image area a1 in image chas the same target filling icon to indicate that the preset cleaning area A1 is no longer cleaned.
- the image areas a2-a4 in the first cleaning images a-cmay also identify preset target filling icons to indicate that the preset cleaning areas A2-A4 are not cleaned, and the image area a1 in the first cleaning image d may not be cleaned.
- the target filling icon or the preset target filling iconis marked to indicate that the preset cleaning area A1 is no longer cleaned, which will not be described in detail here.
- the first cleaning imageis generated when the degree of dirt corresponding to the first target preset cleaning area is obtained, that is, every time a cleaning of a preset cleaning area is completed (that is, every time a dirt detection is completed)
- a first cleaning imageis displayed.
- the first cleaning image a, the first cleaning image b, the first cleaning image c, and the first cleaning image dare respectively placed in the preset cleaning areas A1 and A2 after each cleaning is completed.
- At least two first cleaning imagescan be generated sequentially or simultaneously after the cleaning task is completed, that is, multiple first cleaning images are displayed sequentially or simultaneously after the cleaning task is completed, for example, as shown in Figure 35
- the usercan selectively display the corresponding first cleaning image by clicking on the labels on the screen, numbers 1 to 5 in Figure 35, or as shown in Figure 36, the user can Multiple first cleaning images can be displayed in sequence by clicking on the "Clean Image" icon on the screen, or as shown in Figure 37, multiple first cleaning images can be displayed on the screen by clicking on the icon on the screen.
- At least one first cleaning imageis dynamically displayed as the animation or short video plays, or the changing process of the preset cleaning area corresponding to multiple first cleaning images is displayed through the animation or short video.
- first cleaning images a-dcan be displayed in sequence through animation or short videos; the images of image area a1, image area a2, image area a3, and image area a4 can also be displayed over time through animation or short video.
- the target filling iconschange sequentially, in which the target filling icons identified in each image area are determined according to the degree of dirt corresponding to each preset cleaning area, so that the cleaning process of the cleaning equipment can be displayed through animation or short video, such as cleaning equipment
- the actual cleaning sequence of each preset cleaning area and the corresponding degree of dirt after each preset cleaning areais cleaned.
- the sequential display of the first cleaning images a-dreflects that the cleaning order of the preset cleaning area by the cleaning equipment is in accordance with A1 -Clean each preset cleaning area A1, A2, A3, A4 in the order of A2-A3-A4, and the preset can also be reflected by changes in the target filling icons identified in each image area a1-a4 in the first cleaning image a-d.
- the changes in the cleaning effect of the cleaning areas A1-A4will help the user understand the cleaning process of the cleaning equipment and the degree of dirtiness of the preset cleaning area during the cleaning process.
- multiple first cleaning imagescan be displayed in sequence through animation or short videos; changes over time in the target filling icon identified in image area a1, and changes in the target filling icon identified in image area a2 can also be displayed through animation or short videos.
- the number of times the equipment cleans the preset cleaning areas, the change in the degree of dirtiness after each cleaning of each preset cleaning area, and the cleaning sequence of the preset cleaning areas by the cleaning equipmentwhich will help users understand the cleaning process of the cleaning equipment. and the process by which a preset cleaning area gradually becomes cleaner after multiple cleanings of the cleaning equipment.
- the animation or short videocan be generated and displayed in real time during the cleaning process of the cleaning equipment, or can be generated and displayed after the cleaning process of the cleaning equipment is completed to reproduce the cleaning process of the cleaning equipment. There are no restrictions here.
- generating a cleaning image according to the degree of dirt corresponding to the preset cleaning areaincludes: determining at least one second target preset cleaning area, where the second target preset cleaning area is all areas that have been cleaned i times.
- the preset cleaning areawhere i is an integer greater than or equal to 1; generate the i-th second cleaning image according to at least one target degree of dirtiness, wherein the target degree of dirtiness is the second target preset cleaning
- the degree of dirt corresponding to the second target preset cleaning area obtained after the i-th cleaning of the area, the i-th second cleaning imageincludes all image areas corresponding to the preset areas, and each The image area corresponding to the second target preset cleaning area is respectively marked with a target filling icon, and the target filling icon corresponding to the image area identification corresponding to each second target preset cleaning area is respectively obtained according to the i-th
- the target degree of contamination corresponding to each of the second target preset cleaning areasis determined.
- the processing methodalso includes: the image area corresponding to the non-second target preset cleaning area does not identify the target filling icon; or the image area corresponding to the non-second target preset cleaning area identifies the preset target filling icon. ; Or the target filling icon of the image area identification corresponding to the non-second target preset cleaning area is determined based on the degree of dirt corresponding to the most recently obtained non-second target preset cleaning area; wherein, the non-second target preset cleaning area A preset cleaning area other than the second target preset cleaning area.
- the cleaning equipmentcompletes the cleaning task, if the cleaning equipment has cleaned the preset cleaning area A1 three times and cleaned the preset cleaning area A2 three times, the preset cleaning area A2 will be cleaned three times. Assume that the cleaning area A3 has been cleaned once, and the preset cleaning area A4 has been cleaned twice, then the target dirtiness levels corresponding to all the preset cleaning areas that have been cleaned once can be determined, such as the preset cleaning area
- the corresponding degree of dirtiness obtained after each of A1-A4 is cleaned oncegenerates the first second cleaning image, such as the second cleaning image a, as shown in Figure 38(a) or Figure 39(a),
- the second cleaning image aincludes all image areas a1-a4 corresponding to the preset areas A1-A4, and each image area a1-a4 is marked with a target filling icon, and each image area a1-a4 is marked with a target filling icon.
- the illustrationsare determined based on the corresponding dirtiness levels of the preset cleaning areas A1-A4 to indicate the dirtiness level before the preset cleaning areas A1-A4 were cleaned once respectively; similarly, they can be based on all the dirtiness levels that have been cleaned 2 times.
- the target dirtiness level corresponding to the preset cleaning area for the second timesuch as the corresponding dirtiness level obtained after each of the preset cleaning areas A1, A2, and A4 is cleaned for the second time, generates the second second cleaning image, such as The second cleaning image b, as shown in Figure 38(b) or Figure 39(b), the second cleaning image b includes all image areas a1-a4 corresponding to the preset areas A1-A4, and each image area a1
- the target filling icons marked by , a2 and a4are determined according to the corresponding target degree of contamination to indicate the degree of contamination of the preset cleaning areas A1, A2 and A4 after being cleaned twice respectively, because the preset cleaning area A3 has not been cleaned.
- the second cleaning, so the preset cleaning area A3does not belong to the second target preset cleaning area determined when generating the second second cleaning image b.
- the target filling icon identified in the image area a3is based on the preset cleaning area A3.
- the corresponding degree of dirt obtained after one cleaningis determined to show that the degree of dirt in the preset cleaning area A3 has not changed, thereby indicating that the preset cleaning area A3 has not been cleaned for the second time, as shown in Figure 38(b) ); or the target filling icon may not be marked or the preset target filling icon may be marked to indicate that the preset cleaning area A3 has not been cleaned for the second time, as shown in Figure 39(b), which is not done here. Repeat.
- a second cleaning image cis generated based on the degree of dirt obtained by the cleaning equipment after completing the third cleaning of the preset cleaning area A1 and the preset cleaning area A2, as shown in Figure 38(c) or 15 (c) is shown to indicate the degree of dirtiness of the preset cleaning areas A1 and A2 after they have been cleaned three times respectively.
- the workload of the cleaning equipmentcan be reflected based on one second cleaning image, such as the amount of dirt cleaned by the cleaning equipment from each preset cleaning area, and the working process of the cleaning equipment can be reflected based on at least two second cleaning images, such as Changes in the corresponding dirtiness of each preset cleaning area after multiple cleanings.
- a second cleaning imageis generated after the cleaning task is completed, that is, only one second cleaning image is displayed after the cleaning task is completed, such as by clicking a label on the screen.
- the labelis, for example, "th” in Figure 40 1st time”, “2nd time”, “3rd time”, the corresponding second cleaning image is selectively displayed, as shown in Figure 40, any one of the second cleaning images a-c can be selectively displayed. image.
- At least two second cleaning imagesare generated sequentially or simultaneously, that is, after completing the cleaning task, at least two second cleaning images are displayed sequentially or simultaneously.
- the usercan Click the icon on the screen.
- the iconis, for example, "Clean Image" in Figure 41, so that multiple second cleaning images can be displayed in sequence, as shown in Figure 41; or at least two second cleaning images can be displayed on the screen at the same time, as shown in Figure 41.
- the second cleaning images a-care displayed sequentially or simultaneously.
- the i-th second cleaning imageis generated based on at least one target degree of contamination.
- the cleaning equipmentcleans each preset cleaning area A1, A2, A3, and A4 once according to a predetermined cleaning sequence, and then cleans each preset cleaning area A1, A2, A3, and A4.
- the preset cleaning areas that need to be cleaned for the second timeare cleaned for the second time, and so on, until the corresponding dirtiness of each preset cleaning area A1, A2, A3, and A4 is less than the dirtiness threshold; then the cleaning equipment can be After cleaning each preset cleaning area A1, A2, A3, and A4 once, a first second cleaning image is generated, such as the second cleaning image a, when the cleaning equipment cleans the preset cleaning area that needs to be cleaned for the second time. , for example, after the preset cleaning areas A1, A2, and A4 are cleaned for the second time, a second cleaning image is generated, such as the second cleaning image b, and so on, multiple second cleaning images are generated in sequence to display each in stages.
- the degree of dirtiness corresponding to the preset cleaning areareflects the degree of dirtiness of each preset cleaning area and the changes in the degree of dirtiness of each preset cleaning area.
- At least one second cleaning imageis dynamically displayed as the animation or short video plays, or the changing process of the preset cleaning area corresponding to multiple second cleaning images is displayed through the animation or short video.
- the second cleaning image a, the second cleaning image b, and the second cleaning image ccan be sequentially displayed through animation or short video to display the preset cleaning areas A1, A2, A3, and A4 after at least one cleaning.
- the corresponding changes in the degree of dirtinesshelp users understand the cleaning process of the cleaning equipment and the process of the preset cleaning area gradually becoming cleaner.
- the animation or short videocan be generated in real time during the cleaning process of each preset cleaning area by the cleaning equipment, or can be generated after the cleaning equipment completes cleaning of each preset cleaning area to provide a clear picture of the cleaning process.
- the cleaning process of the equipmentis repeated and is not limited here.
- generating a cleaning image based on the degree of dirt corresponding to the preset cleaning areaincludes: generating a third cleaning image based on the acquired accumulated amount of degree of dirt corresponding to the preset cleaning area. For example, each time a cleaning is completed for a preset cleaning area, a third cleaning image is generated. Each cleaning image contains image areas corresponding to all preset cleaning areas, and the image areas corresponding to each preset cleaning area are filled with The target filling icon is determined by the accumulated value of the dirtiness degree corresponding to each preset cleaning area.
- the cleaning equipmentWhen the cleaning equipment performs a cleaning task, the cleaning equipment cleans each of the preset cleaning areas A1, A2, A3, and A4 in the cleaning sequence of A1-A2-A3-A4. , of course, the cleaning order of each preset cleaning area is not limited to this. The cleaning order of A1-A2-A3-A4 will be explained below.
- a third cleaning image acan be generated based on the degree of dirt corresponding to the preset cleaning area A1 obtained after the cleaning equipment cleans the preset cleaning area A1 for the first time, as shown in Figure 43(a) As shown, the third cleaning image a includes all image areas a1-a4 corresponding to the preset cleaning areas A1-A4, and the image area a1 corresponding to the preset cleaning area A1 is filled with a value of 500.
- the value filled in the image area a1is determined by the preset value.
- the degree of dirt corresponding to the first cleaning of cleaning area A1is determined; if after completing this cleaning of preset cleaning area A1, the cleaning equipment needs to continue cleaning the preset cleaning area A1 for the second time, it can be based on the two cleanings.
- the accumulated values of the two dirt levels corresponding to the preset cleaning area A1are then generated to generate a third cleaning image b, as shown in Figure 43(b).
- the third cleaning image bcontains the corresponding values of all preset cleaning areas A1-A4.
- the value 800 filled in the image area a1-a4 of the image area a1 corresponding to the preset cleaning area A1is determined by the degree of dirtiness corresponding to the preset cleaning area A1 obtained for the second time and the preset cleaning area A1 obtained for the first time.
- the accumulated value of the degree of dirtis determined. It can be understood that after the preset cleaning area A1 completes the third cleaning, the third cleaning image c is generated according to the accumulated values of the three degrees of dirt corresponding to the preset cleaning area A1, as shown in Figure 43(c) ), the preset image area a1 corresponding to the cleaning area A1 is filled with a value of 900.
- the third cleaning image dincludes image areas a1-a4 corresponding to all preset cleaning areas A1-A4.
- the value 900 filled in the image area a1 corresponding to the preset clean area A1is determined by the cumulative value of the corresponding three degrees of dirt
- the value 500 filled in the image area a2 corresponding to the preset clean area A2is determined by the corresponding one degree of dirt.
- the image area corresponding to the preset cleaning area that has not been cleaneddoes not identify the target filling icon or identifies the preset target filling icon.
- the image areas a2-a4 in the third cleaning image a-cdo not identify the target filling icon,
- a preset target filling iconcan also be identified, which is not limited here.
- multiple third cleaning imagesare generated, so that the cleaning process of a preset cleaning area by the cleaning equipment can be reflected based on at least two third cleaning images, such as the number of times the cleaning equipment cleans the preset cleaning area and the number of times the cleaning equipment cleans the preset cleaning area. Changes in the amount of dirt cleaned during the cleaning process of the preset cleaning area. The degree of dirtiness of each preset cleaning area before being cleaned and the accumulated cleaning amount of the preset cleaning area by the cleaning equipment can also be displayed based on the last third cleaning image.
- the filling value 900 of the image area a1 corresponding to the preset cleaning area A1is determined based on the accumulated dirt level after three cleanings of the preset cleaning area A1, and the image area a2 corresponding to the preset cleaning area A2
- the filling value 900is determined based on the accumulated dirt level of the preset cleaning area A2 after three cleanings.
- the filling value 100 of the image area a3 corresponding to the preset cleaning area A3is determined based on the preset cleaning area A3 after one cleaning.
- the accumulated dirt levelis determined.
- the filling value 400 of the image area a4 corresponding to the preset cleaning area A4is determined based on the accumulated dirt level after the preset cleaning area A4 has been cleaned twice.
- each preset areahas been cleaned for different times. After cleaning, the difference in the cumulative amount of dirt cleaned by the cleaning equipment in each preset area facilitates the user to increase the perception of the different levels of dirt in each preset area and improve the perception of the cleaning ability of the cleaning equipment.
- the target filling iconcan be filled with a numerical value or a color filling.
- a third cleaning image acan be generated based on the degree of dirt corresponding to the preset cleaning area A1 obtained after the cleaning device cleans the preset cleaning area A1 for the first time.
- the third cleaning image aincludes All the image areas a1-a4 corresponding to the preset cleaning areas A1-A4, and the image area a1 corresponding to the preset cleaning area A1 is filled with color.
- the color filled in the image area a1is determined by the first cleaning of the preset cleaning area A1.
- the degree of contaminationis determined.
- the fill iconcan be filled with color to display the degree of dirt of each preset cleaning area before being cleaned and the effect of the cleaning equipment on the preset cleaning area. cumulative cleaning volume.
- the process of gradually changing the target filling icon of the image area corresponding to the preset cleaning area included in the third cleaning imageis dynamically displayed to reflect the amount of dirt in the preset cleaning area.
- the cleaning processcan also reflect the accumulation process of the dirt elution value in the process of cleaning the preset cleaning area of the mop piece.
- multiple third cleaning imagescan be displayed sequentially in the order in which the third cleaning images are generated through animation or short videos, so that the cleaning process of the cleaning equipment can be displayed through animations or short videos, for example, the cleaning process of the cleaning equipment against a preset cleaning area.
- the cleaning equipmentcleans the preset cleaning area of the dirt accumulation process, which is beneficial to the user to understand the cleaning process of the cleaning equipment, and after the cleaning equipment cleans the preset cleaning area at least once.
- the accumulated cleaning amount of each preset cleaning areaaccording to the degree of dirtiness.
- the animation or short videomay be generated in real time during the cleaning process of each preset cleaning area by the cleaning equipment, or may be generated after the cleaning equipment completes cleaning of each preset cleaning area. Reproduction of the cleaning process of the cleaning equipment is not limited here.
- the cleaning imageincludes a room area, and the room area corresponds to one or at least two preset cleaning areas.
- generating a cleaning image according to the degree of dirtiness corresponding to the preset cleaning areaincludes: determining the target of the room area according to the degree of dirtiness corresponding to one or at least two of the preset cleaning areas in the room area. Fill icon.
- the cleaning equipmentcleans at least one room according to the task map.
- Room Rincludes one or more preset cleaning areas B. After cleaning room R, the cleaning equipment can generate a cleaning image.
- the cleaning imageincludes For the room area r corresponding to room R, it can be understood that the room area r corresponds to the preset cleaning area B, and the target filling icon of the room area r is determined according to the degree of dirt corresponding to the preset cleaning area B.
- Room R1includes preset cleaning area B1, preset cleaning area B2 and preset cleaning area B3.
- the cleaning equipmentcan generate a cleaning image after cleaning room R1.
- the cleaning imageincludes room area r1 corresponding to room R1.
- the room area r1corresponds to the preset cleaning area B1, the preset cleaning area B2 and the preset cleaning area B3.
- the target filling icon of the room area r1is based on the preset cleaning area B1, the preset cleaning area B2 and the preset cleaning area B3.
- the corresponding degree of soilingis determined.
- determining the target filling diagram of the room area based on the degree of dirt corresponding to one or at least two preset cleaning areas corresponding to the room areaincludes: based on the at least two preset cleaning areas corresponding to the room area. Assuming any one of the average degree of dirtiness, the total degree of dirtiness, the maximum degree of dirtiness, or the dirtiness degree of any preset clean area corresponding to the clean area, determine the target filling map of the room area. Show.
- the average degree of dirtiness, the total degree of dirtiness, and the maximum degree of dirtiness corresponding to each preset clean area in the roomcan be calculated.
- any value in the degree of dirtiness of any preset clean areadetermine the target filling diagram of the room area. For example, please refer to Figure 47.
- the cleaning equipmentWhen the cleaning equipment is performing a cleaning task, if the cleaning equipment performs a cleaning on the preset cleaning area B1, the preset cleaning area B2 and the preset cleaning area B3 included in the room R1, for example , the degree of dirtiness corresponding to the preset cleaning area B1, the degree of dirtiness corresponding to the preset cleaning area B2, and the degree of dirtiness corresponding to the preset cleaning area B3 can be accumulated and then divided by the corresponding preset cleaning area in this cleaning to determine the target filling diagram of room area r1 corresponding to room R1 according to the average dirtiness level of the preset cleaning area in room R1; for example, the dirtiness level corresponding to the preset cleaning B1, the preset cleaning area
- the degree of dirtiness corresponding to B2 and the degree of dirtiness corresponding to the preset clean area B3are accumulated to determine the target filling diagram of the room area r1 corresponding to the room R1 based on the total dirtiness level of all preset clean areas in the room R1; for example
- the maximum value of the degree of contaminationdetermines the target filling icon of the room area r1 corresponding to the room R1; for example, the degree of contamination corresponding to the preset clean area B1, the degree of contamination corresponding to the preset clean area B2, and the preset clean area B3 can be determined
- the corresponding degree of contaminationis randomly selected to determine the target filling icon of the room area r1 corresponding to the room R1 based on the degree of contamination corresponding to any preset clean area in the randomly selected room R1.
- the target of the room areais determined by any one of the average degree of dirtiness, the total degree of dirtiness, the maximum degree of dirtiness, or the dirtiness degree of any preset clean area corresponding to the preset clean area.
- the corresponding dirtiness levels of clean area B1, preset clean area B2 and preset clean area B3 after the first cleaningare respectively 500, 600, 100, and the average of the three dirtiness levels of 500, 600 and 100. If the value is 400, the total value is 1200, and the maximum value is 600, then the five values of 600, 500, and 100 can be selected based on the average value of 400, the total value of 1200, and the corresponding pollution degree values of 600, 500, and 100 for the preset cleaning areas B1-B3.
- any value ofdetermine the target filling icon of the room area r1 corresponding to the room R1 to generate the first cleaning image containing the room area r1; the preset cleaning area B1 and the preset cleaning area B2 correspond to each other after the second cleaning
- the degree of dirtinessis 100 and 200 respectively.
- the average of the two values 100 and 200is 150, the total value is 300, and the maximum value is 200. Then the room can be determined based on any one of the values 150, 300, 200, and 100.
- the target filling diagram of the room area r1 corresponding to R1is used to generate the second cleaning image containing the room area r1.
- multiple room cleaning images corresponding to the number of dirtiness levels corresponding to the room areamay be generated based on the multiple dirtiness levels corresponding to the room area. It can be understood that the determination of any one of the average degree of dirt, the total degree of dirt, the maximum degree of dirt, and the first degree of dirt of any preset cleaning area can refer to the foregoing, and will not be described again here.
- the calculationcan be based on the sum of the dirt levels corresponding to the preset cleaning areas corresponding to the room area. Any one of the average dirtiness level, the total dirtiness level, the maximum dirtiness level, and the sum of the dirtiness levels in any preset clean area is used to determine the target filling diagram of the room area to generate a target filling diagram containing the Cleaning images of room areas. For example, if the cleaning equipment cleans the preset cleaning area B1 included in the room R1 twice, cleans the preset cleaning area B2 twice and cleans the preset cleaning area B3 once, for example, the preset cleaning area B1 is cleaned twice.
- the corresponding dirtiness levels obtained by cleaning area B1 after two cleaningsare 500 and 100 respectively. Then the sum of the dirtiness levels corresponding to the two cleanings is 600.
- the preset cleaning area B2's corresponding dirtiness levels obtained after two cleaningsare respectively The degree of dirtiness is 600 and 200, then the sum of the degree of dirtiness corresponding to the two cleanings is 800.
- the corresponding degree of dirtiness of the preset cleaning area B3 after one cleaningis 100.
- the corresponding degree of dirtiness of the preset cleaning area B1is 100.
- the sum of the dirtiness levelsis 600, the sum of the dirtiness levels corresponding to the preset clean area B2 is 800, and the dirtiness level corresponding to the preset clean area B3 is 100.
- the average of these three valuesis 500, the total value is 1500, and the maximum value is 800, then the room R1 can be determined based on any one of the five values of 500, the total value 1500, and the sum of the corresponding dirtiness values of the preset clean areas B1-B3: 600, 800, and 100.
- the target of the corresponding room area r1is filled in to generate a cleaning image containing the room area r1.
- the processing methodalso includes: obtaining the node position of the sequence in which the cleaning equipment performs the cleaning task, the node position including at least one of a starting position, an interruption position, and an end position; and determining to connect two adjacent nodes in the cleaning sequence.
- the area covered by the cleaning trajectory of the node positionis one of the preset cleaning areas.
- the cleaning equipmentwhen the cleaning equipment performs a cleaning task on the room according to the task map, the cleaning equipment interrupts the cleaning task for maintenance according to a workload threshold.
- the workload thresholdincludes a cleaning area threshold, a power consumption threshold, a water consumption threshold, and a mopping threshold.
- the area covered by the cleaning track in the cleaning imagecorresponds to The target fill pattern of the image area is determined by the corresponding degree of dirtiness of the area covered by the cleaning track.
- the cleaning equipmentcleans room R1.
- the cleaning equipmentstarts cleaning from room R1.
- the starting position O1is in room R1.
- the position O2is the interruption position O2.
- the degree of dirtiness corresponding to the area covered by the cleaning trajectory S1 connecting the starting position O1 and the interruption position O2is obtained and the first cleaning image is generated.
- the image area s1 in the cleaning imagecorresponds to the cleaning trajectory.
- the area covered by S1 and the target filling icon identified by the image area s1are determined according to the degree of dirt corresponding to the area covered by the cleaning track S1.
- the second and third cleaning imagescan be generated based on the degree of contamination of the areas covered by the cleaning tracks S2 and S3. If the cleaning equipment also cleans the area covered by the cleaning tracks for the second time, it can be based on the cleaning The degree of dirtiness of the area covered by the trajectory corresponding to the area covered by the cleaning trajectory obtained after the second time is determined, and the target filling icon of the image area corresponding to the area covered by the cleaning trajectory is determined to generate a clean image.
- the working process of the cleaning equipmentcan be reflected by at least one cleaning image generated according to the degree of dirt corresponding to the area covered by the cleaning track, for example, highlighting the cleaning track of the cleaning equipment, and the dirt corresponding to the area covered by different cleaning tracks.
- the degree of contaminationis at least one of the changes in the degree of contamination corresponding to the areas covered by different cleaning trajectories after multiple cleanings.
- the average degree of dirtiness, the total degree of dirtiness, and the degree of dirtiness corresponding to the area covered by each of the cleaning tracks after the i-th cleaningcan also be used.
- the maximum value, any value of the degree of contamination of any preset cleaning area,determine the target filling icon of all image areas corresponding to the areas covered by the cleaning track after the i-th cleaning, to generate the i-th clean image.
- the cleaning equipmentcleans room R1 and room R2. After completing the cleaning of room R1, three cleaning trajectories are formed, namely cleaning trajectories S1-S3. The areas covered by cleaning trajectories S1 and S2 are cleaned respectively.
- the area covered by the cleaning track S3was cleaned once, and the corresponding degree of dirt was obtained each time after the area covered by the cleaning tracks S1-S3 was cleaned.
- the area covered by the cleaning tracks S1-S3was cleaned for the first time.
- the dirtiness levels obtained after 1 timeare 500, 600, and 100 respectively.
- the average of the three dirtiness levelsis 400 and the total value is 1200.
- the cleaning trajectorycan be calculated based on the average value of 400, the total value of 1200, and the total value of 1200.
- the area covered by S1-S3corresponds to any one of the five dirtiness values 500, 600, and 100, and the target filling icon of the graphic area s1-s3 corresponding to the area covered by the cleaning track S1-S3 is determined.
- the dirt levels obtained after cleaning the areas covered by cleaning trajectories S1 and S2 for the second timeare 100 and 200 respectively.
- the average of the two dirt levelsIf the value is 150 and the total value is 300, then any one of the four values of 100 and 200 can be used based on the average value being 150, the total value being 300, and the corresponding dirtiness levels of the areas covered by the cleaning tracks S1 and S2 respectively.
- the changes in the overall dirtiness of the preset cleaning areas on the cleaning image that have been cleaned at different frequencieshighlight the working process of the cleaning equipment.
- the cleaning area covered by the cleaning trackcan be appropriately expanded according to preset rules to make the cleaning area covered by the cleaning track more obvious and convenient for the user to observe, thereby improving the user experience.
- the clean imagecan be called a dirty heat map; optionally, the processing method also includes: generating animation or short video based on the generated clean image.
- an animation or short videocan be generated based on the plurality of cleaning images generated above.
- the cleaning imagescan be played frame by frame.
- FIG. 50is a cleaning image related to an embodiment of the present application.
- a cleaning imageis displayed according to the user's selection operation.
- the usercan determine the cleaning image to be output by selecting different cleaning times, and in response to the cleaning times selected by the user, the cleaning image corresponding to the cleaning times is output and displayed.
- the usercan be prompted to select the aforementioned generated cleaning images in various ways, so that the user can understand the cleaning effect of the cleaning equipment on the floor in different cleaning stages.
- the cleaning images corresponding to the cleaning timesare displayed so that the user can understand the cleaning effect of the cleaning equipment on the floor in different cleaning stages.
- the output cleaning imagealso includes cleaning information corresponding to the cleaning task performed by the cleaning equipment, such as cleaning area and cleaning time, so that the user can understand the working process of the cleaning equipment. Thereby improving the user's experience of using cleaning equipment.
- the method for processing cleaning images of cleaning equipmentincludes: after the cleaning equipment cleans a preset cleaning area once through a cleaning piece, obtaining the degree of dirt corresponding to the preset cleaning area; based on one or at least two Preset the degree of dirtiness corresponding to the cleaning area and generate a cleaning image to visualize the cleaning workload of the cleaning equipment, thereby improving the user's experience of using the cleaning equipment.
- FIG. 51is a schematic block diagram of a processing device 300 for cleaning images of a cleaning device provided by an embodiment of the present application.
- the processing device 300includes a processor 301 and a memory 302.
- processor 301 and the memory 302are connected through a bus 303, such as an I2C (Inter-integrated Circuit) bus.
- bus 303such as an I2C (Inter-integrated Circuit) bus.
- the processor 301may be a micro-controller unit (Micro-controller Unit, MCU), a central processing unit (Central Processing Unit, CPU) or a digital signal processor (Digital Signal Processor, DSP), etc.
- MCUMicro-controller Unit
- CPUCentral Processing Unit
- DSPDigital Signal Processor
- the memory 302may be a Flash chip, a read-only memory (ROM, Read-Only Memory) disk, an optical disk, a U disk or a mobile hard disk, etc.
- ROMRead-Only Memory
- the memory 302may be a Flash chip, a read-only memory (ROM, Read-Only Memory) disk, an optical disk, a U disk or a mobile hard disk, etc.
- the processor 301is used to run a computer program stored in the memory 302, and when executing the computer program, implement the steps of the aforementioned method for processing a cleaning image with a cleaning device.
- the processor 301is used to run a computer program stored in the memory 302, and implement the following steps when executing the computer program:
- a cleaning imageis generated based on the degree of dirtiness corresponding to one or at least two preset cleaning areas.
- Figure 26is a schematic diagram of a cleaning equipment system provided by an embodiment of the present application.
- the cleaning equipment systemincludes:
- the cleaning equipment 100includes a movement mechanism and cleaning parts, the movement mechanism is used to drive the cleaning equipment 100 to move, so that the cleaning parts clean the preset cleaning area;
- Base station 200the base station 200 is at least used to clean the cleaning parts of the cleaning equipment 100;
- Figure 27is a schematic diagram of a cleaning equipment system provided by an embodiment of the present application.
- the cleaning equipment systemincludes:
- the cleaning equipment 100includes a movement mechanism, cleaning parts and a maintenance mechanism.
- the movement mechanismis used to drive the cleaning equipment 100 to move so that the cleaning parts clean the preset cleaning area.
- the maintenance Mechanismis used to clean the cleaning parts; and,
- the cleaning device 100includes at least one of a cleaning robot, a handheld cleaning device, and other cleaning devices.
- the cleaning device 100can clean the cleaning parts by itself, for example, the cleaning device 100 includes a maintenance mechanism.
- the cleaning equipment 100cannot clean the cleaning parts by itself.
- the cleaning equipment systemalso includes a base station 200, where the base station 200 is at least used to clean the actuator of the cleaning equipment.
- the cleaning device 100is provided with a device controller
- the base station 200is provided with a base station controller, for example.
- the device controller and/or the base station controller of the base station 200can be used individually or in combination as a process Device 300 is used to implement the steps of the method in the embodiment of the present application; in other embodiments, the cleaning system includes a separate processing device 300, used to implement the steps of the method in the embodiment of the present application.
- the control device 300can be set at
- the cleaning device 100may be installed on the base station 200; of course, it is not limited thereto.
- the processing device 300may be a device other than the cleaning device 100 and the base station 200, such as a home smart terminal, a master control device, etc.
- Embodiments of the present applicationalso provide a computer-readable storage medium.
- the computer-readable storage mediumstores a computer program.
- the processorcan implement the steps of the above method.
- the computer-readable storage mediummay be an internal storage unit of the processing device described in any of the preceding embodiments, such as a hard disk or memory of the processing device.
- the computer-readable storage mediummay also be an external storage device of the processing device, such as a plug-in hard disk, a smart memory card (Smart Media Card, SMC), or a secure digital (SD) equipped on the processing device. ) card, Flash Card, etc.
- the processing device 300can be used to implement the steps of the cleaning image processing method of the cleaning device in the embodiment of the present application.
- Cleaning equipmentcan be used to automatically clean the floor.
- the application scenarioscan be household indoor cleaning, large-scale place cleaning, etc.
- cleaning equipmentcannot display its cleaning process, making it impossible for users to understand the cleaning process of the cleaning equipment, thereby affecting the user's experience of using the cleaning equipment.
- Figure 52is a schematic flowchart of a method for generating a visual interface provided by an embodiment of the present application.
- the method for generating a visual interfacecan be applied in a cleaning equipment system to display the cleaning process of the cleaning equipment in the system, so as to realize the visualization of the cleaning process of the cleaning equipment.
- the cleaning process of the cleaning equipmentmay be that the cleaning equipment cleans the area to be cleaned.
- the area to be cleanedmay be any area to be cleaned such as a family space, a room unit of a family space, a partial area of a room unit, a large place, or a part of a large place.
- the area to be cleanedcan refer to the larger area that is cleaned for the first time, such as the entire room unit; it can also refer to the area that needs to be filled after the first cleaning of the larger area, such as the wall area in the room unit. or obstacle areas.
- the usermay not be aware of the switching of execution items of the cleaning device during actual use, and cannot understand the cleaning process of the cleaning device. It affects the user's experience of using cleaning equipment. Therefore, it is urgent to visualize the cleaning process of cleaning equipment, present the cleaning information included in the cleaning process of cleaning equipment, so that users can understand the cleaning process of cleaning equipment, and record the historical cleaning process of cleaning equipment. , thereby improving the user's satisfaction with the use of the cleaning equipment. Furthermore, the user can personally adjust the cleaning tasks of the cleaning equipment based on the historical cleaning process of the cleaning equipment to better fit the user's living habits and further improve the user's satisfaction with the cleaning equipment. Usage experience, such as providing a method to generate a visual interface.
- the method for generating a visual interfaceincludes steps S110 to S120.
- Step S110Obtain all or part of the completed execution items of the cleaning equipment.
- the cleaning deviceis, for example, at least one of a cleaning robot, a handheld cleaning device, and other devices for cleaning the area to be cleaned.
- the cleaning equipmentcan record the execution items executed. Therefore, all or part of the completed execution items of the cleaning equipment can be obtained based on the record of the execution items executed by the cleaning equipment.
- Step S120Generate a visual interface based on the acquired execution items of all or part of the cleaning equipment.
- the visual interfaceis used to indicate all or part of the completed execution items of the cleaning equipment through animation.
- the execution items of the cleaning equipment when performing the cleaning taskmay include at least one of moving, performing a specific execution action, performing a specific execution action and moving.
- a visual interfacecan be generated based on all execution items currently completed by the cleaning equipment; for example, a visualization interface can be generated based on part of the execution items currently completed by the cleaning equipment. interface.
- a visual interfacecan be generated based on all the execution items completed by the cleaning equipment; or for example, the visual interface can be generated based on part of the execution items completed by the cleaning equipment.
- the execution items used to generate the visual interfacecan be the execution items set by the manufacturer by default, the execution items selected by the user, or the execution items randomly selected by the cleaning robot. There are no restrictions here.
- a visual interfaceis generated based on the acquired execution items of all or part of the cleaning equipment, and the visual interface is used to indicate all or part of the completed execution items of the cleaning equipment through animation, including: when the execution item is When moving: Obtain the preset map and the movement path of the cleaning equipment when moving, and generate a visual interface based on the preset map and movement path. The visual interface is used to indicate the movement trajectory of the cleaning equipment on the preset map through animation.
- the preset mapcan be established by the cleaning equipment by exploring the current space in response to the mapping instruction, or it can be updated by the cleaning equipment based on obstacles, carpets, etc. identified during the cleaning process; optionally , the preset map may be a preset map including a user-specified area to be cleaned, for example, in response to the user-selected area to be cleaned, such as one or more rooms, determining the one or more rooms as a preset map, or in response to Based on the areas to be cleaned circled by the user on the default map, such as partial areas of one or more rooms, the partial areas of the one or more rooms are determined to be the default map, and of course it is not limited to this.
- a visual interfaceis generated based on the preset map and movement path, wherein the visualization interface generates an animation of the movement trajectory on the preset map based on the movement path of the cleaning equipment. For example, as shown in Figure 53(a), a dotted line corresponding to the movement trajectory is dynamically generated on the preset map.
- the visual interfacemay not display the dotted line corresponding to the movement trajectory. It can still be seen that the cleaning equipment is moving, but no movement trajectory appears on the visual interface. The user can observe through the movement of the cleaning equipment. Movement trajectory of cleaning equipment. The animation indicates the movement trajectory of the cleaning equipment on the preset map, thereby visualizing the movement of the cleaning equipment during the cleaning process, which is beneficial to improving the user's experience of using the cleaning equipment.
- a visual interfaceis generated based on the acquired execution items of all or part of the cleaning equipment, and the visual interface is used to indicate all or part of the completed execution items of the cleaning equipment through animation, including: when the execution item is When performing a specific execution action: obtain the specific execution action of the cleaning equipment, and generate a visual interface based on the specific execution action.
- the visual interfaceis used to indicate the specific execution action of the cleaning equipment through animation.
- the cleaning equipmentdetermines that the execution item is a specific execution action
- the animationshows that the cleaning equipment is performing the specific execution action. Therefore, when the user watches the animation on the visual interface, the user can judge the specific execution action of the cleaning equipment through the specific execution action of the cleaning equipment. Execution matters are conducive to visualizing the specific execution actions of the cleaning equipment and improving the user's experience of using the cleaning equipment.
- the visual interfaceafter generating the visual interface according to the specific execution action, it also includes: obtaining the degree of contamination corresponding to the area covered by the cleaning device executing the specific execution action; and, according to the degree of contamination corresponding to the area covered by the cleaning device executing the specific execution action.
- the degree of dirtinessdetermines the display effect of the area covered by the specific execution actions of the cleaning equipment on the visual interface.
- the specific execution actionsinclude sweeping, mopping, sweeping and mopping at the same time, or other specific execution actions.
- the cleaning equipmentAfter the cleaning equipment performs the specific execution action, it can determine the degree of contamination corresponding to the area covered by the specific execution action. Then it can dynamically generate cleaning on the visual interface based on the degree of contamination corresponding to the area covered by the specific execution action by the cleaning equipment.
- the display effect of the area covered by the specific execution actions of the deviceExemplarily, the display effect of the area covered by the specific execution action of the cleaning equipment is dynamically displayed on the visual interface, as shown in the gray area in Figure 54.
- the display effectis, for example, the depth of the color, where the dirtiness of the preset cleaning area is The higher the degree of dirt, the darker the color.
- the display effect of the area covered by the cleaning equipment's specific execution actions on the visual interfacefor example, gradually changes from a lighter color or a transparent color to the degree of dirtiness of the preset cleaning area.
- the corresponding darker colorallows users to understand the degree of dirtiness of the preset cleaning area through the display effect of the area covered by the specific execution actions of the cleaning equipment when watching the animation of the visual interface, which is conducive to the realization of the cleaning process of the cleaning equipment.
- the visualization of the degree of dirtiness of the preset cleaning area determined in the systemimproves the user's experience of using the cleaning equipment.
- the display effect of the area covered by the specific execution actions of the cleaning equipmentis not limited to this.
- the display effectalso includes the density of lines, the depth of shadows, the density of patterns, the size of numerical values or other display effects, which are not discussed here. limit.
- a visual interfaceis generated based on the acquired execution items of all or part of the cleaning equipment, and the visual interface is used to indicate all or part of the completed execution items of the cleaning equipment through animation, including: when the execution item is When executing specific execution items and moving: Obtain the preset map and the movement path of the cleaning equipment when moving, as well as specific execution actions. Among them, the cleaning equipment performs specific execution actions when moving based on the movement path. According to the preset map and movement path, and specific execution actions Execute the action to generate a visual interface. The visual interface is used to indicate through animation the movement trajectory of the cleaning equipment on the preset map and the specific execution actions performed when moving.
- the specific principles and implementation methods of the preset mapcan be referred to the above, and will not be described again here.
- the execution itemis executed with a specific execution action when moving according to the movement path.
- the animation of the cleaning equipment moving on the preset map according to the movement pathis displayed on the visual interface to indicate the movement trajectory of the cleaning equipment on the preset map through animation.
- Execution itemsso that when users watch the animation of the visual interface, they can judge the execution items of the cleaning equipment through the movement trajectory of the cleaning equipment on the preset map and the specific execution actions of the cleaning equipment when moving, which is conducive to the movement of the cleaning equipment. And the visualization of specific execution actions improves the user's experience of using cleaning equipment.
- the visual interfaceafter generating the visual interface based on the preset map, movement path, and specific execution actions, it also includes: obtaining the degree of contamination corresponding to the area covered by the specific execution actions and movement of the cleaning equipment; and, according to the cleaning equipment The degree of dirtiness corresponding to the area covered by performing specific execution actions and moving is determined, and the display effect of the area covered by the cleaning equipment performing specific execution actions and moving is determined on the visual interface.
- specifically performing actions and movingmay be sweeping and moving, mopping and moving, sweeping and mopping simultaneously and moving, or other specific performing actions and moving.
- the cleaning equipmentAfter the cleaning equipment performs the specific execution action and moves, it can determine the degree of contamination corresponding to the area covered by the specific execution action and movement. Then, the degree of contamination corresponding to the area covered by the specific execution action and movement of the cleaning equipment can be determined.
- the display effect of the cleaning equipment performing specific actions and moving the covered areais dynamically generated on the visual interface.
- the display effect of the cleaning equipment performing specific actions and moving the covered areais dynamically displayed on the visual interface.
- the display effectis, for example, the depth of color, where the preset cleaning The more soiled the area, the darker the color.
- the movement trajectory of the cleaning equipment on the preset mapis generated on the visual interface, as shown in the dotted line in Figure 53(b).
- the cleaning equipmentperforms specific actions and moves.
- the display effect of the covered areagradually changes from a lighter color or a transparent color to a darker color corresponding to the degree of dirtiness of the preset cleaning area, as shown in the gray area in Figure 53(b), so that the user is watching the visualization.
- the display effect of the area covered by the specific action and movement of the cleaning equipmentis not limited to this.
- the display effectalso includes the density of lines, the depth of shadows, the density of patterns, the size of numerical values, or other display effects.
- the animationis playing, in response to the movement of the cleaning equipment, the visual interface can see that the cleaning equipment is moving, but no movement trajectory appears on the visualization interface. The user can observe the movement trajectory of the cleaning equipment through the movement of the cleaning equipment. There are no restrictions here.
- Figure 54in conjunction with Figure 53(b).
- the cleaning equipmentWhen the execution of the cleaning equipment is completed, as shown in Figure 54, when the cleaning equipment completes mopping and moving the living room floor, the cleaning equipment sweeps and moves the floor. The area covered is the living room. According to the display effect of the living room, the user can be prompted that the living room needs to be repeatedly mopped and moved. For example, the text "Prepare for repeated cleaning" can also be displayed to prompt the user to perform cleaning equipment, thereby improving the user's comfort. Use experience.
- the animationincludes a character identification, where the character identification is used to refer to the cleaning equipment.
- a visual interfaceis generated based on the execution items.
- the visual interfaceis used to indicate all or part of the execution items completed by the cleaning equipment through animation, including: determining the execution actions corresponding to the role identification according to the execution items, wherein the animation is used to indicate The execution action corresponding to the role ID.
- the role identificationincludes at least one of a role image, a text identification, and an executive agency identification.
- determining the execution action corresponding to the character identification according to the execution itemincludes: when the execution item of the cleaning equipment is movement, the animation displays the movement of at least one of the preset character image, text identification, and execution agency identification; When the execution matter of the cleaning equipment is to perform a specific execution action, the animation displays at least one of the execution action character image, the execution action text identifier, and the execution action execution structure identifier corresponding to the specific execution action; when the execution matter of the cleaning equipment is to execute a specific execution action When the action is executed and moved, the animation displays at least one of the execution action character image, the execution action text identifier, and the execution action execution structure identifier corresponding to the specific execution action; when the execution item of the cleaning equipment is to execute the specific execution action and move, the animation Display at least one of the execution action role, execution action text ID, and execution action execution structure ID corresponding to the specific execution action, and display the execution action role
- the character imageis, for example, the Q version of the whale spirit.
- the animationshows that the movement path of the Q version of the whale spirit is to move from the current position on the preset map to the target position.
- the movement path of the Q version of Whale Spiritis determined based on the movement path of the cleaning equipment. For example, please refer to Figure 55.
- the execution item of the cleaning equipmentis to move to the base station, if the base station is included in the default map displayed on the visual interface, the location of the base station is determined as the target position, and the Q version of Whale Spirit is dynamically displayed through animation.
- the text markis, for example, the text "Cleaning Robot”.
- the motion path of the animated text "Robot”is to move from the current position on the preset map to the target.
- the animationshows that the wheel rotates and the movement path of the wheel is to move from the current position on the preset map to the target position, and follow the movement of the wheel on the preset map Dynamically generate the movement trajectory of the wheel, or not generate the movement trajectory.
- the execution structure identifieris, for example, a motion mechanism such as a wheel
- the animationshows that the wheel rotates and the movement path of the wheel is to move from the current position on the preset map to the target position, and follow the movement of the wheel on the preset map Dynamically generate the movement trajectory of the wheel, or not generate the movement trajectory.
- the execution action character imageis, for example, a Q-version whale spirit carrying a Q-version cleaning tool.
- the animationshows that the Q-version whale spirit carrying the Q-version broom alternately performs the sweeping action toward the left and the right at the current position.
- the execution action text markis, for example, the text "The robot is sweeping the floor”. For example, as shown in Figure 56, it is represented by a simple diagram such as a black dot.
- the current position of the cleaning equipmentis displayed, and the text "The robot is sweeping the floor” is displayed in the animation and played cyclically from left to right at the current position; when the execution item of the cleaning equipment is to perform a specific execution action, such as sweeping the floor, the execution action execution structure identifier is, for example, Side Brush, for example, animates the side brush rotating at its current position.
- the execution action character image, the execution action text mark, and the execution action execution structure markis not limited to this.
- the animationdisplays the image of the character performing the action, such as the Q version of the whale spirit carrying the Q version of the broom, alternately performing towards the left While sweeping the floor and performing the sweeping action to the right, move from the current position to the target position, and follow the movement of the Q-version whale spirit carrying the Q-version broom to dynamically generate the Q-version whale carrying the Q-version broom on the preset map.
- the spirit's movement trajectorymay only dynamically move on the preset map.
- the animationdisplays the text mark of the execution action, such as the text "The robot is sweeping the floor” and plays it cyclically from left to right. At the same time, it moves from the current position to the target position, and follows the movement of the text "The robot is sweeping the floor” to dynamically generate the movement trajectory of the text "the robot is sweeping the floor” or the movement of the text "the robot is sweeping the floor” on the preset map.
- the animationdisplays the execution structure identifier of the execution action, such as the side brush rotating while The current position moves to the target position, and following the movement of the side brush, the movement trajectory of the side brush is dynamically generated on the preset map, or it only dynamically moves on the preset map.
- the animationcan also combine and display at least two of the character image, text logo, and execution structure logo.
- the animationdisplays the execution action text mark, such as the text "The robot is sweeping the floor” cyclically from the left to the right to play and display the execution structure logo of the execution action.
- the side brushrotates while displaying the text "The robot is sweeping the floor” and the side brush moves from the current position to the target position, and follows the text "The robot is sweeping the floor” and the side brush.
- the movementdynamically generates its movement trajectory on the preset map or only moves without generating a movement trajectory.
- the animationdisplays the execution action character image, such as the Q version whale spirit carrying the Q version mop, and displays the execution action execution structure identifier, such as Mop, and display the Q version of the whale spirit carrying the Q version of the mop and the mop moving to the base station, and at the same time follow the movement of the Q version of the whale spirit and the mop carrying the Q version of the mop to dynamically generate its movement trajectory or only move without generating a movement trajectory
- the animationshows that the Q version of the whale spirit carrying the Q version of the mop and the mop are at the corresponding position of the base station
- the animationshows that the Q version of the whale spirit carrying the Q version of the mop rubs and cleans the Q version of the mop and rotates the mop.
- the execution action role identifier, the execution action text identifier, and the execution action execution structure identifiercan also be at a position on the visual interface.
- Fixed displaysuch as performing action character identification, such as the Q version of the whale spirit carrying a Q version broom, maintaining the action of walking and sweeping the floor in the position, such as performing action text identification, such as "The robot is sweeping the floor"
- action text identificationsuch as "The robot is sweeping the floor”
- the textscrolls and jumps in this position
- Displayfor example, the execution structure identification of the execution action, for example, the side brush rotates and jumps in place within the range corresponding to the position, to indicate that the execution matters of the cleaning equipment include performing specific execution actions and moving, optionally, over time, in the visualization
- the movement trajectory of the cleaning equipmentis dynamically generated on the interface to indicate the movement trajectory of the cleaning equipment.
- At least one of the execution action role identifier, the execution action text identifier, and the execution action execution structure identifier on the visual interfacecan be used to indicate that the execution item of the cleaning equipment is to perform a specific execution action and move it, and does not affect the visual interface.
- the character identificationalso includes an organism identification.
- the animationdisplays at least one of the execution action character image, the execution action text identifier, and the execution action execution structure identifier corresponding to the specific execution action, and displays The body logo moves.
- the execution item of the cleaning equipmentis to perform a specific execution action and move
- at least one of the execution action character image, the execution action text identifier, and the execution action execution structure identifiercan be combined with the body identifier.
- the animationdisplays the execution action text mark of the cleaning equipment, for example, "The weather is really nice, I am going to sweep 100 square meters and work for two hours.” For example, "Sweep 100 square meters.” Texts such as "flat” and “dry for two hours” can be updated based on the information corresponding to the cleaning tasks performed by the cleaning equipment.
- the animationdisplays the body logo.
- the top view of the cleaning equipmentis used as the body logo of the cleaning equipment to move and follow the movement of the body logo.
- the movementdynamically generates the movement trajectory of the body logo.
- the body logocan also be combined with the execution action character image and the execution action execution structure logo to animate the execution items of the cleaning equipment to perform specific execution actions and move.
- the animationdisplays at least one of the execution action character image, the execution action text mark, and the execution action execution structure mark to perform the specific execution action and move, and displays the body mark movement, which is not limited here. Of course, it is not limited to this.
- At least one of the execution action character image, the execution action text identification, the execution action execution structure identification and the body identificationcan follow Moving with the body logo, for example, at least one of the execution action character logo, the execution action text logo, the execution action execution structure logo, and the body logo are simultaneously displayed in the same area, or the body logo does not need to be moved, as shown in Figure 59. At least one of the execution action character image, the execution action text logo, the execution action execution structure logo, and the body logo are displayed in different areas.
- At least one methodjumps and performs specific execution actions within a region of the visual interface to instruct the cleaning equipment to perform execution items and move.
- the execution item of the cleaning equipmentis to execute a specific execution item and move
- the body logomay not move, for example, maintaining a jumping action in a fixed area of the visual interface.
- the movement trajectory of the cleaning equipmentis dynamically generated on the interface to indicate the movement trajectory of the cleaning equipment.
- At least one of the execution action character identifier, the execution action text identifier, the execution action execution structure identifier, and the body identifier on the visual interfacecan be used to indicate that the execution matter of the cleaning equipment is to perform a specific execution action and move it, and There is no restriction on how at least one of the execution action character identification, the execution action text identification, the execution action execution structure identification, and the body identification in the animation on the visual interface is displayed.
- the animationcan display a text mark of the cleaning mop piece such as "Little Whale Spirit is carrying the mop home to clean the mop"; animation
- the cleaning mop character imagecan also be displayed, such as the Q version of the whale spirit carrying the Q version of the mop moving to the base station position, and when the Q version of the whale spirit carrying the Q version of the mop is at the base station position, the animation shows the Q version of the whale spirit versus the Q version.
- the mopis rubbed and cleaned; for example, the animation can also display the logo of the cleaning mop actuator, such as the mop moving to the base station, and when the mop is at the base station, the animation displays the flowing water flowing to rinse the mop.
- the animationdisplays the flowing water flowing to rinse the mop.
- the above-mentioned At least two of the text logo of the cleaning and mopping part, the character image of the cleaning and mopping part, and the execution structure of the cleaning and mopping partare displayed in combination, which is not limited here.
- the specific execution actionis a specific execution action other than moving to the base station and cleaning the dragged parts
- at least one of the corresponding execution action text identifier, execution action character image, and execution action execution structure identifiercan also be displayed through animation.
- the animationmay display a text mark for receiving the instruction, such as "I am here to work hard", which is not limited here.
- specific execution actionsinclude mopping, sweeping, sweeping and mopping at the same time, cleaning carpets, cleaning mopping parts, repeated cleaning, edge leak repair, alternate extension of edge brushes, obstacle exploration, charging midway during tasks, and obstacles. At least one of crossing over, getting out of trouble, receiving instructions, and cleaning a specific area, but is certainly not limited to this.
- the animationdisplays at least one of the mopping character image, the mopping text logo, and the mopping execution structure logo; when the specific execution action is sweeping the floor, the animation displays the sweeping character image, At least one of the sweeping text logo and the sweeping and mopping execution structure logo; when the specific execution action is to sweep and mop the floor at the same time, the animation displays at least one of the sweeping and mopping character image, the sweeping and mopping text logo, and the sweeping and mopping execution structure logo. kind; when the specific execution action is carpet cleaning, the animation displays at least one of a cleaning carpet character image, a cleaning carpet text logo, and a cleaning carpet execution structure logo.
- the animationwhen the specific execution action is sweeping the floor, the animation displays a sweeping character image, such as a Q version whale spirit carrying a Q version broom, alternately performing sweeping actions toward the left and performing sweeping actions toward the right; the animation displays the sweeping text
- the logois, for example, "the robot is sweeping the floor”; the logo of the animation display sweeping execution structure is, for example, side brush rotation.
- at least two of the aforementioned sweeping character image, sweeping text mark, and sweeping execution structure markmay be displayed in combination.
- the animationwhen the specific execution action is mopping the floor, the animation displays the mopping character image, for example, a Q version whale spirit carrying a Q version mop, alternately performing the mopping action toward the left and performing the mopping action toward the right;
- the animated mopping text markis, for example, "the robot is mopping the floor”;
- the mopping execution structure markfor example, is mopping cloth rotation.
- at least two of the aforementioned mopping character images, mopping text logos, and mopping execution structure logosmay be displayed in combination.
- the animationdisplays the sweeping and mopping character image, for example, the Q version whale spirit carrying the Q version mop and Q version broom to perform the mopping and sweeping actions at the same time;
- the animated sweeping and mopping text markis, for example, "the robot is sweeping and mopping at the same time.”
- the animated sweeping and mopping execution structure markfor example, is that the side brush and the mop rotate simultaneously.
- at least two of the aforementioned sweeping and mopping character images, sweeping and mopping text logos, and sweeping and mopping execution structure logosmay be displayed in combination.
- the animationwhen the specific execution action is carpet cleaning, the animation displays a carpet cleaning character image, such as a Q version whale spirit carrying a Q version broom, appearing on the carpet to perform the sweeping action; the animation displays the carpet cleaning text logo, for example, " "The robot is cleaning the carpet”; the animation shows that the cleaning carpet execution structure identifier is, for example, at least one of at least one side brush rotation, or a mid-sweeping motion, or the mop gradually disappearing.
- the cleaning carpet execution structure identifieris, for example, at least one of at least one side brush rotation, or a mid-sweeping motion, or the mop gradually disappearing.
- the cleaning carpet execution structure identifieris, for example, at least one of at least one side brush rotation, or a mid-sweeping motion, or the mop gradually disappearing.
- at least two of the aforementioned cleaning carpet character image, cleaning carpet text logo, and cleaning carpet execution structure logoare displayed in combination.
- the animationcan dynamically display at least one of the corresponding character image, text logo, and execution structure logo.
- At least one of a character image, a text identifier, and an execution structure identifieris intended to prompt the user to perform an execution action corresponding to an execution item of the cleaning equipment.
- at least one of the character image, text identifier, and execution structure identifier corresponding to the specific execution actionmay be preset, may be expanded and updated later, or may be set by the user. This is not the case here. Make limitations.
- the actuator identificationincludes at least one of a side brush identification, a drag part identification, and a middle sweep identification.
- the animationdisplays the execution action execution structure corresponding to the specific execution action, including: when the specific execution action is mopping the floor, the animation displays the mopping execution structure identifier as The mopping part logo, and the rotation of the mopping part logo are displayed; when the specific execution action is sweeping the floor, the animation shows that the sweeping execution structure logo is at least one of the middle sweep logo and the side brush logo, and the movement of the mid-sweep logo, At least one of the side brush identification movements; when the specific execution action is sweeping and mopping the floor at the same time, the animation display sweeping and mopping execution structure identification is at least one of the mopping part identification, the middle sweep identification, and the side brush identification, and , displaying at least one of the movement of the mopping element logo, the movement of the mid-sweep logo, and the movement of
- the animationmay show, for example, that the logo of the mopping member drops to contact the ground and then rotates and mops.
- the position of the mopping part logogradually changes from a slightly dull gray to a cleaner position as the mopping part logo rotates, to remind the user that the execution of the cleaning equipment is to mop the floor.
- the cleaning equipmentcan select at least one of the middle sweep and the side brush to clean the floor according to the material of the ground.
- the animationcan, for example, show the movement of the middle sweep logo after it touches the ground. , and the dirt at the position of the middle scan logo gradually disappears as the middle scan logo moves; and/or, the animation can, for example, show that the side brush logo moves after it unfolds and touches the ground, and the position of the side brush logo changes with the movement of the side brush logo. Movement dirt gradually disappears, prompting the user to clean the equipment and clean the floor.
- the cleaning equipmentcan control at least one side brush to expand alternately, and the animation can, for example, show that the mopping piece mark moves after it drops to touch the ground, and the position of the mopping piece mark follows the mopping piece mark.
- the animationcan, for example, show the movement of the mid-scan logo after it touches the ground, and the dirt at the location of the mid-scan logo gradually disappears as the mid-scan logo moves; and/ Or, for example, the animation may display at least one side brush logo alternately unfolding and contacting the ground and retracting without contacting the ground. At the same time, it moves after unfolding and contacting the ground, and the position of each side brush logo follows the movement of the corresponding side brush logo. The dirt gradually disappears to remind the user that the cleaning equipment is to be swept and mopped at the same time.
- the cleaning equipmentcan also control the side brushes to expand alternately to avoid contamination of the side brushes when sweeping and mopping the floor at the same time. The floor has been mopped.
- the cleaning equipmentcan select at least one of a middle sweep and a side brush according to the material of the carpet to clean the carpet.
- the animationcan, for example, show that the middle sweep mark moves after it drops to contact the carpet, and the dirt at the position of the middle sweep mark gradually disappears as the middle sweep mark moves; and/or, at least one side brush
- the logoalternately unfolds and contacts the carpet and retracts without contacting the carpet.
- the cleaning devicecan also control the lifting of the mopping member when cleaning the carpet to minimize the mopping member from wetting the carpet.
- the specific execution actions corresponding to the execution items of the cleaning equipmentmay be preset, may be expanded and updated at a later stage, or may be set by the user themselves, which is not limited here.
- the character identifierincludes an organism identifier.
- the execution action corresponding to the character identificationis determined according to the execution item, wherein the animation is used to indicate the execution action corresponding to the character identification, including: when the execution action of the cleaning equipment is movement, the animation displays the movement of the body identification.
- the animationcan, for example, show that the body identification moves, and as the body identification moves Dynamically generate the movement trajectory of the body logo.
- FIG. 60is a schematic flowchart of a method for generating a visual interface provided by another embodiment of the present application.
- the method for generating a visual interfaceincludes steps S210 to S230.
- Step S210Obtain all or part of the completed execution items of the cleaning equipment.
- Step S220Generate a visual interface based on the acquired execution items of all or part of the cleaning equipment, and the visual interface is used to indicate all or part of the completed execution items of the cleaning equipment through animation.
- step S210 and step S220can refer to the specific principles and implementation methods of the aforementioned step S110 and step S120, and will not be described again here.
- Step S230Display a prompt of the first execution item on the visual interface, where the first execution item is an execution item that meets the preset conditions.
- the preset conditionsinclude any of the following: cleaning carpets, cleaning mops, repeated cleaning, edge leak repair, alternate extension of edge brushes, obstacle exploration, charging during task execution, obstacle crossing, escape, and reception. Instructions, specific area cleaning.
- a prompt for the first execution itemis displayed on the visual interface.
- the preset conditioncan also be customized by the user, and the corresponding execution item set by the user is the first execution item.
- the time when the prompt of the first execution item is displayed on the visual interfaceis not earlier than the time when the visual interface indicates the first execution item through animation.
- the animation of executing the first execution itemis displayed on the visual interface and a prompt of the first execution item is displayed at the same time; or, the prompt of executing the first execution item is displayed on the visual interface.
- a prompt for the first execution itemis displayed during the animation of the item, so as to highlight the execution item of the cleaning equipment as the first execution item.
- displaying a prompt for the first execution item on the visual interfaceincludes: displaying a pop-up window on the visual interface; and displaying at least one of copywriting, pictures, and animation corresponding to the first execution item in the pop-up window.
- the execution item of the cleaning equipmentis highlighted as the first execution item.
- the copy corresponding to the first execution item displayed in the pop-up windowmay be, for example, information corresponding to the execution item.
- the copy corresponding to the execution item displayed in the pop-up windowincludes, for example, "Little Whale Spirit is carrying the mop home and cleaning the mop!"
- the copy corresponding to the execution item displayed in the pop-up windowincludes, for example, "Little Whale Spirit is carrying the mop home and cleaning the mop!"
- Figure 62it is not limited to this; please refer to Figure 62.
- the copy corresponding to the first execution item displayed in the pop-up windowmay include, for example, the number of executions corresponding to the first execution item, the first execution At least one of the cleaning time corresponding to the item and the cleaning area corresponding to the first execution item.
- the copy in the pop-up windowincludes, for example, "I'm out to work hard!”. Of course, it is not limited to this. For example, it can also include " I’m going to sweep 100 square meters and do it for two hours!” etc., and highlight the implementation of cleaning equipment through copywriting as the first implementation item.
- the picture corresponding to the first execution item displayed in the pop-up windowmay include, for example, a picture of at least one of the environment in which the cleaning equipment is located and the role identification of the cleaning equipment.
- the picture displayed in the pop-up windowmay include, for example, a Q-version whale spirit carrying a Q-version mop near the base station.
- the picture displayed in the pop-up windowmay include, for example, a Q-version whale spirit carrying a Q-version mop near the base station.
- displaying the animation corresponding to the first execution item in the pop-up windowmay include any one of a preset first execution item animation and an animation corresponding to the first execution item displayed on the visual interface.
- displaying the preset first execution item animation in the pop-up windowfor example, please refer to FIG. 61 to FIG. 62 , when the first execution item is cleaning the mop piece and moving it, the preset first execution item animation is displayed in the pop-up window.
- the execution item animationcan display the content of the Q version of Whale Spirit moving to the base station and cleaning the drag items in the base station, but of course it is not limited to this; in some embodiments, by displaying the first execution item on the visual interface in a pop-up window
- the corresponding animationfor example, the animation corresponding to the first execution item is displayed in a certain position or a certain part of the visual interface
- the pop-up windowcan, for example, enlarge the display of a certain position or a certain part of the visual interface.
- the animation corresponding to the first execution itemis, for example, an enlarged display of the movement trajectory of the cleaning equipment corresponding to the first execution item and/or the animation corresponding to the execution item displayed at a certain position or a certain part of the visual interface, so as to pass
- the animationhighlights the execution of cleaning equipment as the first execution item.
- displaying the pop-up window in the visual interfaceincludes: the background transparency of the pop-up window is within a preset transparency range, so that the pop-up window does not completely block the animation in the visual interface or highlight the pop-up window.
- the background transparency of the pop-up windowcan be set to a lower value within the preset transparency range to highlight the pop-up window and thereby highlight the execution items of the cleaning equipment as the first execution item.
- the cleaning process of the cleaning deviceis, for example, a process in which the cleaning device cleans a room designated by the user.
- the tasks performed by the cleaning equipment in cleaning the room designated by the userinclude sweeping and moving, mopping and moving, and cleaning the mop parts.
- the animationis displayed on the visual interface according to the order of execution of the cleaning equipment. For example, the animation first displays the Q version of the whale spirit carrying the Q version of the broom alternately performing sweeping actions towards the left and sweeping towards the right. The movements move at the same time, and follow the movement of the Q version of the whale spirit carrying the Q version of the broom to dynamically generate a corresponding movement trajectory for sweeping and moving.
- the corresponding movement trajectory for sweeping and movingcan cover the entire room, for example; then the animation displays the Q version carrying the Q version of the whale spirit.
- the Q-version whale spirit of the mopalternately performs mopping actions toward the left and mops toward the right and moves simultaneously, and follows the movement of the Q-version whale spirit carrying the Q-version mop to dynamically generate mopping and move corresponding movements. trajectory; then the animation shows that when the Q version of the whale spirit carrying the Q version of the mop alternately performs mopping actions towards the left and right, while moving to a certain position, the Q version of the whale spirit stays at that position to mop the floor.
- the Q-version mopis rubbed and cleaned.
- a pop-up windowpops up on the visual interface.
- the Q-version mopis enlarged and displayed.
- the Q-version Whale Spirit of the moprubs and cleans the Q-version mop, and so on, to visually display the cleaning process of the cleaning equipment.
- the visual interfacedisplays animations of multiple execution items at the same time.
- the animationsimultaneously displays the Q version of the whale spirit carrying the Q version of the broom and the Q version of the mop.
- the Q-version whale spirit carrying the Q-version broomalternately performs sweeping actions toward the left and the right, and the Q-version whale spirit carrying the Q-version mop follows behind and alternately moves toward the left. Perform the mopping action and perform the mopping action towards the right side.
- the Q version whale spirit carrying the Q version mopmoves to a certain position
- the Q version whale spirit carrying the Q version mopstays at that position and mops the Q version mop. Carry out rubbing and cleaning.
- a pop-up windowwill pop up on the visual interface.
- the Q version of the whale spiritwill be enlarged to display the Q version.
- the mopis rubbed and cleaned, thereby intuitively showing the user the movement trajectory and execution matters involved in the cleaning process of the cleaning equipment through at least one of animations and pop-up windows on the visual interface.
- the visual interfacecan also display animations based on all or part of the execution items currently executed by the cleaning equipment, and dynamically update the animation as the execution items of the cleaning equipment increase, which is not limited here.
- the generation methodalso includes: obtaining the duration of the animation in the visual interface; when the duration of the animation in the visual interface is greater than the preset animation duration threshold, compressing the duration of the animation in the visual interface.
- the duration of the animation in the visual interfaceneeds to be controlled accordingly. For example, when the duration of the animation in the visual interface is greater than the preset animation duration threshold, the duration of the animation in the visual interface is compressed. For example, compressing the duration of the animation may mean speeding up the playback speed of the animation.
- the duration of the animation in the visual interface and the duration of the pop-up windowcan also be controlled accordingly according to the preset animation duration threshold, so as to increase the user's interest in watching the animation in the visual interface, thereby facilitating cleaning. Visualize the cleaning process of the equipment and improve the user's experience of using the cleaning equipment.
- the visual interfacealso includes sharing the identification and/or saving the identification.
- the sharing logois used to instruct the user to share the visual interface
- the save logois used to instruct the user to save the visual interface.
- the save logois, for example, a download logo
- the animation in the visual interfaceis shared or saved, for example, in the form of a video, so as to conveniently meet the user's sharing and/or saving needs for the visual interface, thereby improving the user's awareness of the cleaning equipment. Use experience.
- FIG. 65is a schematic block diagram of a visual interface generation device 200 provided by an embodiment of the present application.
- the generating device 200includes a processor 201 and a memory 202 .
- the processor 201 and the memory 202are connected through a bus 203, such as an I2C (Inter-integrated Circuit) bus.
- a bus 203such as an I2C (Inter-integrated Circuit) bus.
- the processor 201may be a micro-controller unit (Micro-controller Unit, MCU), a central processing unit (Central Processing Unit, CPU) or a digital signal processor (Digital Signal Processor, DSP), etc.
- MCUMicro-controller Unit
- CPUCentral Processing Unit
- DSPDigital Signal Processor
- the memory 202may be a Flash chip, a read-only memory (ROM, Read-Only Memory) disk, an optical disk, a U disk or a mobile hard disk, etc.
- ROMRead-Only Memory
- the memory 202may be a Flash chip, a read-only memory (ROM, Read-Only Memory) disk, an optical disk, a U disk or a mobile hard disk, etc.
- the processor 201is configured to run a computer program stored in the memory 202, and implement the steps of the aforementioned visual interface generation method when executing the computer program.
- the processor 201is used to run a computer program stored in the memory 202, and implement the following steps when executing the computer program:
- a visual interfaceis generated based on the acquired execution items of all or part of the cleaning equipment, and the visual interface is used to indicate all or part of the execution items of the cleaning equipment through animation.
- Figure 66is a cleaning equipment system provided by an embodiment of the present application.
- the cleaning equipment systemincludes:
- the cleaning equipment 100includes a movement mechanism and an actuator, the movement mechanism is used to drive the cleaning equipment 100 to move, so that the actuator performs cleaning;
- the generation device 200can be used to implement the steps of the method for generating a visual interface in the embodiment of the present application.
- the cleaning equipmentincludes at least one of a cleaning robot, a handheld cleaning equipment, and other cleaning equipment.
- the cleaning device 100can, for example, clean the execution mechanism that performs the cleaning task by itself.
- the cleaning device 100cannot, for example, clean the execution mechanism that performs the cleaning task by itself.
- the cleaning equipment systemalso includes one or more base stations. The base station is used in conjunction with the cleaning device 100 to at least clean the actuator of the cleaning device.
- the cleaning equipment systemincludes a separate generating device 200 for implementing the steps of the visual interface method of the embodiment of the present application.
- the generating device 200can be provided on the cleaning equipment 100, or can be provided on the base station; of course, it can also It is not limited to this.
- the generating device 200can be a device other than the cleaning device 100 and the base station, such as a home smart terminal, a master control device, etc.; in other embodiments, the cleaning device 100 is provided with a device controller, a base station, etc.
- a base station controlleris provided, and the equipment controller and/or the base station controller may serve alone or in combination as the generating device 200 for implementing the steps of the visual interface generating method in the embodiment of the present application.
- Embodiments of the present applicationalso provide a computer-readable storage medium.
- the computer-readable storage mediumstores a computer program.
- the processorcan implement the steps of the above method.
- the computer-readable storage mediummay be an internal storage unit of the generation device described in any of the preceding embodiments, such as a hard disk or memory of the generation device.
- the computer-readable storage mediummay also be an external storage device of the generating device, such as a plug-in hard disk, a smart memory card (Smart Media Card, SMC), or a secure digital (SD) equipped on the generating device. ) card, Flash Card, etc.
- Cleaning robotscan be used to automatically clean floors, and their application scenarios can include household indoor cleaning, large-scale place cleaning, etc.
- the cleaning robotcan clean the floor through cleaning parts. After cleaning the floor for a period of time, the cleaning robot often runs out of power or the cleaning parts become dirty. It needs to return to the base station for maintenance, such as charging the cleaning robot or cleaning the floor. Parts are cleaned; usually the cleaning robot is limited to return to the base station after completing the cleaning of one room. However, this does not allow each room to be cleaned well, and in some cases it will also affect the cleaning efficiency of the cleaning robot. For example, some When the area of a certain room in the scene is relatively large, the cleaning ability of the cleaning parts cannot meet the needs of cleaning the area.
- the cleaning effectis not good, or the power of the cleaning robot cannot meet the requirements.
- the cleaning of the areacauses the cleaning robot to return to the base station for charging before completing the cleaning of the area. It takes a long time to charge before returning to the area to continue cleaning.
- the cleaning efficiencyis also affected; and some area division methods make the area of each area If it is too small, it will need to return to the base station for maintenance every time it completes an area, making the cleaning robot return to the base station for maintenance more frequently and lowering the cleaning efficiency.
- FIG. 67is a schematic flowchart of a cleaning area dividing method for a cleaning robot provided by an embodiment of the present application.
- the cleaning area dividing method of the cleaning robotcan be applied in a cleaning system for processes such as dividing a room in a to-be-cleaned area to obtain a preset cleaning area.
- the area to be cleanedcan be any area to be cleaned such as a family space, a room unit of a family space, a part of a room unit, a large place or a part of a large place.
- the cleaning systemincludes one or more cleaning robots 100 and one or more base stations 200 .
- the base station 200is used in conjunction with the cleaning robot 100, at least for maintaining the cleaning robot; for example, the base station 200 can charge the cleaning robot 100, the base station 200 can provide a docking position for the cleaning robot 100, etc.
- the base station 200can also clean the cleaning parts of the cleaning robot 100.
- the cleaning partsmay include brushing parts, such as side brushes and middle brushes. The brushing parts are used to sweep the ground to remove garbage or dust on the ground.
- the cleaning partmay also include a mopping part, and the mopping part is used for mopping the ground to clean stains on the ground.
- the cleaning systemalso includes a control device 300.
- the control device 300can be used to implement the steps of the cleaning area dividing method of the cleaning robot and/or the steps of the control method of the cleaning robot according to the embodiment of the present application.
- the robot controller of the cleaning robot 100 and/or the base station controller of the base station 200can serve as the control device 300 alone or in combination, for implementing the steps of the method in the embodiment of the present application.
- the cleaning systemincludes a separate control device 300 for implementing the steps of the method in the embodiment of the present application.
- the control device 300can be provided on the cleaning robot 100 or can be provided on the base station 200; of course, it can also It is not limited thereto.
- the control device 300may be a device other than the cleaning robot 100 and the base station 200, such as a home smart terminal, a master control device, etc.
- the cleaning robot 100can be used to automatically clean the floor.
- the application scenarios of the cleaning robot 100can be household indoor cleaning, large-scale place cleaning, etc.
- the cleaning area dividing method of the cleaning robot according to the embodiment of the present applicationincludes steps S110 to S130.
- the cleaning task mapincludes Room 1, Room 2, and Room 3; when obtaining the graphical characteristics of the room in step S110, the graphical characteristics of one or more rooms can be obtained.
- the roomsinclude rooms separated by scanning by the cleaning robot, and also include rooms edited by users (such as splitting and merging).
- a roomcan be understood as an area defined by tangible boundaries such as walls, steps, and obstacles (such as box beds) on the cleaning task map. It can also include rooms defined by users.
- User-defined roomsare, for example, areas enclosed by walls. Part of the area, such as the open kitchen, dining room, etc. in the living room, or a user-defined room can also be a room obtained by merging multiple areas defined by tangible boundaries, such as the living room and balcony can be used as one room.
- the cleaning robotcan obtain the boundaries of the room through radar, vision sensors, distance sensors, etc. to determine the graphic characteristics of the room, or when the cleaning robot performs edge cleaning of the area to be cleaned, based on edge cleaning
- the cleaning trajectorydetermines the boundary of the room, and the graphic characteristics of the room are determined based on the boundary of the room.
- the initial cleaning task mapis obtained after the cleaning robot detects the area to be cleaned.
- the edited cleaning task mapcan be obtained according to the user's editing operation on the initial cleaning task map, such as merging rooms or splitting rooms.
- the workload value rangeincludes an upper limit value and a lower limit value, and the upper limit value is greater than the lower limit value.
- the amount of dirt that the cleaning robot's mopping parts can absorbis limited. When the mopping parts absorb more dirt, the cleaning effect on the ground is poor. If the mopping parts are not returned to the base station for maintenance, such as cleaning and mopping If the mopping parts are replaced or the mopping parts are replaced, the ground cannot be mopped clean; the power of the cleaning robot is also limited. If the power is insufficient when cleaning the floor, it cannot be guaranteed to return to the base station for charging; The amount of water in the water tank used to supply water to the mopping parts on the robot is also limited. When the amount of water is insufficient, the cleaning effect on the ground is also poor; the amount of dirt that the dust box on the cleaning robot can hold is also limited. Limited, when the amount of dirt contained is large, the cleaning effect on the floor is also poor.
- the cleaning robotin order to ensure that the mopping part has the cleaning ability, it is necessary to insert the mopping part maintenance task in the middle of the task, so that the cleaning robot navigates back to the base station, cleans or replaces the mopping part, and then continues to perform the cleaning task of the area to be cleaned.
- the cleaning robotcan be controlled to return to the base station for maintenance in time before the workload reaches the upper limit of the workload value range, thereby improving the cleaning effect on the ground.
- the maintenance of the mopping partscan also be completed by the cleaning robot without returning to the base station.
- the cleaning robothas its own water tank and can directly clean the mopping parts, or the cleaning robot has its own mopping part replacement device and can directly clean the mopping parts. Replace the wiper parts.
- the obtaining the workload value domain rangeincludes: determining the preset cleaning area in at least two workload value domain ranges according to the user's selection operation.
- workload value rangeFor example, when the workload includes the area of the floor to be cleaned, the preset at least two workload value ranges include 5-7, 10-12, and 14-16, in square meters; the user can adjust the workload according to the graphical characteristics of the room. And/or the user's cleaning habits determine the workload value range for dividing the preset cleaning area in at least two workload value ranges.
- a workload value range with a relatively large upper limit and/or lower limitsuch as 14-16; for example, when the user wants the cleaning robot to be maintained more frequently or to clean cleaner.
- control devicecan determine the workload value for dividing the preset cleaning area within at least two preset workload value ranges based on the graphical characteristics of the room and/or the user's cleaning habits. domain scope.
- S130Determine the dividing line of the room according to the workload value range and the graphical characteristics, so that the dividing line and the boundary of the room form at least two preset cleaning areas, each of which is preset. It is assumed that the magnitude of the workload in the cleaning area is less than or equal to the upper limit of the workload value range, and greater than or equal to the lower limit of the workload value range; or there is only one preset value The magnitude of the workload of the cleaning area is less than the lower limit, and the cleaning sequence of the preset cleaning area whose magnitude of the workload is less than the lower limit is after the other preset cleaning areas.
- the magnitude of the workload of each of the preset cleaning areasis less than or equal to the upper limit of the workload value range, so that the cleaning robot completes the work of each of the preset cleaning areas.
- the current cleaning taskis interrupted and the movement is carried out to the base station for maintenance.
- the current cleaning taskincludes a cleaning task for a preset cleaning area, or a cleaning task for the floor of a room, or it may also include a cleaning task for the floors of all rooms in the whole house, or it may also include a cleaning task for Cleaning tasks are performed in the rooms indicated on the task map.
- the cleaning taskincludes mopping the floor with a mopping member, brushing the floor or a carpet on the floor with a brushing member, and may also include mopping and brushing the floor at the same time.
- the workloadincludes at least one of the following: the amount of dirt absorbed by the cleaning robot's mopping part when mopping the floor, the power consumption of the cleaning robot when cleaning the floor, The amount of water consumed when cleaning the floor, the amount of dirt collected when the cleaning robot cleans the floor, the area of the floor cleaned by the cleaning robot, and the path length of the floor cleaned by the cleaning robot.
- the upper limit of the workload value rangecan be determined based on the changing relationship between the cleaning effect of the mopping element and the area of the floor cleaned by the cleaning robot; for example, in After the cleaning robot is maintained, the cleaning robot is controlled to clean the floor.
- the upper limit of the workload value rangeis determined based on the area of the floor cleaned by the cleaning robot; wherein, the maintenance of the robot includes mopping. Clean or replace parts, charge the cleaning robot, replenish or drain the water tank of the cleaning robot, empty the dust box of the cleaning robot, etc.
- the upper limit of the workload value rangecan be based on the cleaning effect of the mopping element and the amount of dirt absorbed by the mopping element when mopping the floor.
- the changing relationship between the amount of dirt adsorbedis determined; for example, when the floor is mopped after maintenance of the mop piece, and the mopping effect of the mop piece on the floor is very poor, the amount of dirt adsorbed by the mop piece is determined by the amount of dirt adsorbed by the mop piece.
- the dirt value d of the mopping partdetermines the upper limit of the workload value range; of course, it is not limited to this.
- the upper limit of the workload value rangecan be based on the maximum dirt of the mopping part.
- the value d_maxis determined, and the maximum dirt value d_max is an empirical value, which can be measured in a laboratory, for example.
- the lower limit of the workload value rangecan be determined based on the upper limit of the workload value range, for example, 0.6 to 0.8 times the upper limit.
- determining the dividing line of the room based on the workload value range and the graphical characteristicsincludes: determining based on the graphical characteristics and/or the room identification of the room.
- the magnitude of the workloadis less than the lower limit value, and the cleaning sequence of the preset cleaning area whose magnitude value of the workload is less than the lower limit value is after the other preset cleaning areas.
- the unit areacan be a grid in the cleaning task map, but of course it is not limited to this.
- the unit areacan be an area of any size, such as an area of 0.5 square meters or an area of 1 square meter; the unit area It may be a rectangle or a square, and of course is not limited thereto, for example, it may be a parallelogram.
- the workloadcan be determined according to the boundaries of the unit area and the room. and/or the distance between obstacles in the room determines the workload per unit area.
- the workload of the unit areais negatively correlated with the distance between the unit area and the boundary of the room and/or obstacles in the room.
- the environment mapcontains multiple grids.
- One gridis a unit area, or multiple grids are combined into a unit area. Calculate the distance between each grid and obstacles in the environment map. distance, thereby determining the workload of each unit area.
- the maximum distance, minimum distance, or average value of the distances between the multiple grids and obstaclesis determined. Workload; the closer the unit area is to the obstacle, the greater the workload, or it can be said that the cleaning cost of the cleaning robot to clean the unit area is higher.
- S1represents an obstacle
- the thick black linerepresents a wall
- the workload of unit areas in different roomsFor example, there are differences in the workload of unit areas in different rooms. For example, places with more people's activities, such as dining rooms/living rooms, are areas that are more likely to get dirty, while places with less people's activities, such as bedrooms/studies, are cleaner areas. ;For example, the workload of the unit area in the room marked as dining room/living room is greater than the workload of the unit area in the bedroom/study.
- the graphical characteristics of the roominclude the distribution of dirt in the room (such as a dirt heat map), such as the dirt level of each unit area; each unit area can be determined based on the dirt level of the unit area in the room.
- the workload of the unit areafor example, the workload of the unit area is positively correlated with the degree of dirt of the unit area.
- the distribution of dirt in the roomcan be determined based on the detection results of the cleaning robot's sensors, such as vision sensors; or a separate image sensor can be used to photograph the floor in the room, identify the captured images, and determine the room.
- the distribution of dirt in the room; or after the cleaning robot completes cleaning different areas in the room, the dirt status in different areascan be determined based on the detection information of the sewage in the cleaning mop parts, or based on the amount of dirt in the dust box Determine the dirtiness of different areas.
- the distribution of dirt in the roomcan be the current distribution of dirt in the room, or it can also be the distribution of dirt in the room in historical data.
- Embodiments of the present applicationcan determine the workload of each unit area in the room based on the graphical characteristics and/or the room identification of the room, and divide the room according to the workload of each unit area to obtain the preset cleaning area. , can more truly reflect the workload of the cleaning robot in the preset cleaning area, such as the amount of dirt adsorbed by the mopping parts, and can ensure that the cleaning robot has a better cleaning effect and higher cleaning efficiency.
- the dividing line of the roomis determined based on the workload value range and the graphical characteristics, so that the dividing line and the boundary of the room form at least two preset cleaning Region, including: determining the preset workload of each region formed after the room is divided according to the workload value range and the graphical characteristics; moving the dividing line along the long side of the boundary, and determining The workload of the area divided by the dividing line; when the workload of at least one area divided by the dividing line is equal to the corresponding preset workload, stop moving the dividing line.
- the dividing line of the roomis determined so that the dividing line and the boundary of the room form at least two preset cleaning areas; for example In other words, as shown in Figure 68, the living room is divided.
- the total area of the living roomis 48 square meters. According to the workload value range, it is determined that the area formed after the room is divided includes a preset workload, such as the area for an area of 6 square meters.
- the roomis divided according to the longest side of the room.
- the horizontal length of the living roomis 8m and the vertical length is 6m.
- the longest side of the roomis the horizontal side. It is necessary to divide a preset cleaning area with a workload equal to 6 square meters; as shown on the left side of the arrow in Figure 68
- the embodiment of the present applicationmoves the dividing line (indicated by a dotted line) laterally, and in the process of moving the dividing line laterally, it is determined whether there is a workload infinitely close to 6 square meters (can be regarded as equal to 6 square meters) in the divided area. area, stop moving the dividing line when the workload of the divided area reaches 6 square meters.
- the roomis divided according to the longest side of the room.
- the change in the workload of dividing the areais relatively small, which makes it easier to control the workload of dividing the area and make the work of dividing the area easier. It is more consistent with the preset workload; on the other hand, it can avoid the appearance of long and narrow areas to a greater extent (as shown on the right side of the arrow in Figure 68, when the dividing line is moved longitudinally (short side), 6 square meters The area is 8 meters long and is a long and narrow area), thereby reducing the difficulty of cleaning by the cleaning robot.
- the dividing linemay be a straight line, a curve, or a closed line forming a figure (such as the dividing line forming the area S in Figure 71), or a combination of different line types.
- the dividing lineis perpendicular to the long side. In order to make the divided preset cleaning area square and easy to plan the cleaning path.
- the preset cleaning areais divided according to the workload value range.
- multiple division schemescan be generated. For example, there is at least one dividing line in any two different division schemes. Different, so that at least one preset cleaning area in any two different division schemes is different; and a division scheme that meets the preset conditions is determined from the multiple division schemes.
- At least two division schemesmay be determined based on the workload value range, the cleaning order of at least two of the rooms, and the area of each of the rooms, and at least one of any two division schemes must be
- the dividing linesare different, so that at least one preset cleaning area in any two dividing schemes is different.
- the areas of the three rooms that need to be cleanedare 3, 8, and 7 square meters respectively.
- the order of room cleaningis 3 square meters of room - 8 square meters of room - 7 square meters of room, that is In Figure 70, the room cleaning sequence is Room 1 - Room 2 - Room 3.
- Each preset cleaning areais obtained by dividing the room according to the cleaning order of the room.
- the order of room divisionis based on the order of room cleaning, as shown in Figure 70
- the cleaning order of at least two of the roomscan be determined based on the distance between the rooms and the base station. For example, cleaning the room farther away from the base station first can prevent the dirty mop parts from contaminating the cleaned floor for a second time. .
- the cleaning order of at least two of the roomscan be determined according to the distance between the rooms with a degree of dirt. For example, the room with a higher degree of dirt is cleaned first, and then the room with a lower degree of dirt is cleaned, which can effectively prevent the occurrence of two rooms. pollution.
- division plan 1When divided according to the workload value range of 5-7 square meters, in all division plans, except for the preset cleaning area that was cleaned last in some division plans, the The areas are all within 5-7 square meters.
- Different division plansinclude division plan 1 to division plan 3 as shown in the figure; among them, division plan 1 merges the 2 square meters area of room 2 with the 3 square meters area of room 1 As a preset cleaning area 1 of 5 square meters, the remaining 6 square meters of room 2 is used as preset cleaning area 2, and the 7 square meters area of room 3 is used as preset cleaning area 3 (division scheme 1 can be expressed as 3+2
- Division plan 2combines the 3 square meters area of room 2 with the 3 square meters area of room 1 as a 6 square meter preset cleaning area 1, and the remaining 5 square meters of room 2 m area as the default cleaning area 2, and the 7 square meters area of room 3 as the default cleaning area 3 (division plan 2 can be expressed as 3+3
- the division schemealso includes at least one of the following: 3+2
- the cost value for completing each preset cleaning areamay be determined based on each preset cleaning area determined in the division scheme, and each division may be determined based on the cost value corresponding to each preset cleaning area in each division scheme.
- the cumulative cost value of the planis to select the dividing line corresponding to one division plan from at least two division schemes whose cumulative cost value satisfies the preset cost condition as the dividing line of at least two of the rooms, or determine the cumulative cost value.
- the dividing line corresponding to the smallest dividing schemeis the dividing line of at least two of the rooms.
- the cost valuecan be reflected by the number of times the cleaning robot interrupts the cleaning task, that is, the number of times it returns to the base station for maintenance.
- the final partitioning schemeis determined based on the number of times the cleaning robot interrupts the cleaning task in each partitioning scheme; for example, choosing to interrupt the cleaning task.
- the division plan with the least number of interruptionsis the final division plan.
- the division plan that meets the preset conditionsis the division plan that interrupts the cleaning tasks the least frequently. That is, the least number of interruptions in the cleaning tasks represents the lowest value.
- the preset cleaning divisionWhen it comes to areas, priority is given to a division scheme that allows the cleaning robot to interrupt the cleaning task as little as possible, thereby reducing the consumption of the cleaning robot traveling to and from the base station to improve the efficiency of the entire cleaning task.
- the preset cleaning areas 1, 2, and 3 in the division plan 1 and the division plan 2each need to be interrupted once to complete one cleaning. Then the cost value of each preset cleaning area can be calculated as 1, then the division
- the cumulative cost value of plan 1 and division plan 2are both calculated as 3; in division plan 3, preset cleaning areas 1, 2, 3, and 4 each need to be interrupted once to complete one cleaning, then the cost value of each preset cleaning area can be counted as 1, then the cumulative cost value of partition plan 3 is counted as 4.
- the partition plan 1 and the partition plan 2 satisfy the preset cost conditionthat is, the partition plan 1 and the partition plan 2 can be used as alternatives.
- the position of the cleaning robot in each division scheme when it interrupts the cleaning taskcan be determined, and the number of times when the cleaning robot interrupts the cleaning task is not at the door of the room where the cleaning robot is located, the number of times when the cleaning robot interrupts the cleaning task in each division scheme can be determined.
- the number of times the position is not at the door of the room where the cleaning robot is locateddetermines the final division scheme, that is, the generation value can be reflected by the number of times when the position of the cleaning robot is not at the door of the room where the cleaning robot is located when it interrupts the cleaning task; for example, select the position of the cleaning robot when it interrupts the cleaning task.
- the division plan that is not at the door of the room where the cleaning robot is located the least number of timesis the final division plan. At this time, the division plan that meets the preset conditions is the division that is not at the door of the room where the cleaning robot is located the least number of times when the cleaning robot interrupts the cleaning task.
- the solutionis that if the cleaning robot interrupts the cleaning task at a location that is not at the door of the room where the cleaning robot is located the least number of times, the representation value is the lowest.
- the priorityis to select a cleaning robot that interrupts the cleaning task at a location that is not at the door of the room where it is located.
- the least frequent division schemecan reduce the possibility of cross-contamination caused by cleaning robots across different rooms, thereby improving the efficiency of the entire cleaning task while taking into account the cleaning effect. Please refer to Figure 70.
- the rectangular pattern filled with hatched linesrepresents the room door, and the circular pattern filled with hatched lines represents the location of the base station; the locations of Division Scheme 1 and Division Scheme 2 when the cleaning task is interrupted in the preset cleaning area 1 are not in Room 2. door, then the value of the preset cleaning area 1 is calculated as 1.
- the cleaning taskis interrupted in the preset cleaning area 2
- the locationis at the door of room 2
- the value of the preset cleaning area 2can be calculated as 0.
- the cleaning robotcan directly enter the base station. At this time, the position of the cleaning robot can be regarded as being at the door of room 3, and the value of the preset cleaning area 3 can be calculated as 0.
- the cleaning robotcan directly enter the base station.
- the position of the cleaning robotcan be regarded as being at the door of room 3, and the cost value of the preset cleaning area 4 can be calculated as 0, which corresponds to the division plan 3.
- the number of times when the cleaning task is interruptedis not at the door of the room, and the cumulative cost value is calculated as 3; if the preset cost condition is that the cumulative cost value is less than or equal to 2, then the division plan 1 and division plan 2 meet the preset cost conditions, That is, Division Plan 1 and Division Plan 2 can be used as alternatives.
- the cumulative cost values of multiple partitioning schemesare all less than or equal to the preset cost threshold, you can select any one of the multiple partitioning schemes; or when the cumulative costs of multiple partitioning schemes are When the values are all smaller than the cumulative cost values of other partitioning schemes, any one of the multiple partitioning schemes can be selected.
- the cumulative cost value of each division schemeand selecting the division scheme with a smaller cumulative cost value as the final division scheme, the cleaning efficiency of the entire cleaning task can be improved, while also taking into account the cleaning effect of the cleaning robot.
- the determination of the cost value when completing each of the preset cleaning areasincludes: determining the room where the cleaning robot is located and the backwashing point after completing the workload of each of the preset cleaning areas.
- the pointis the location where the robot completes one of the preset cleaning areas and needs to return to the base station; the cost value is determined based on the room where the cleaning robot is located and the backwash point.
- the room where the cleaning robot is locatedis room 2, and the backwash point is not at the door of room 2; the preset cleaning is completed After completing the workload of area 2, the room where the cleaning robot is located is room 2, and the backwash point is at the door of room 2; after completing the workload of preset cleaning area 3, the room where the cleaning robot is located is room 3, and the cleaning robot can enter directly
- the base stationcan be regarded as the backwash point at the door of room 3.
- the room where the cleaning robot is locatedis room 2, and the backwash point is not at the door of room 2; after completing the workload of the preset cleaning area 2, The room where the cleaning robot is located is room 2, and the backwash point is not at the door of room 2; after completing the workload of the preset cleaning area 3, the room where the cleaning robot is located is room 3, and the backwash point is not at the door of room 3; the preset cleaning is completed After the workload of area 4, the room where the cleaning robot is located is room 3.
- the cleaning robotcan directly enter the base station. At this time, it can be regarded as the backwash point at the door of room 3.
- determining the cost value based on the room where the cleaning robot is located and the backwash pointincludes: determining the cost factor value based on the room where the cleaning robot is located and the backwash point; The factor magnitude determines the value of the consideration.
- the cost factor magnitudeincludes at least one of the following: the distance of the cleaning robot from the backwash point to the doorway of the room where the cleaning robot is located, the movement of the cleaning robot from the backwash point The number of rooms or preset areas passed by the base station, the path length of the cleaning robot from the backwash point to the base station, the cleaning robot returning from the base station to the backwash point or the next The number of rooms or preset areas that a preset cleaning area passes through, the path length of the cleaning robot returning from the base station to the backwash point or the preset cleaning area to be cleaned; wherein the cost value is related to each The cost factors are positively correlated.
- the final divisionis determined by determining the cost value when completing each of the preset cleaning areas based on the aforementioned cost factor values, and determining the cumulative cost value of each division plan based on the cost value corresponding to each preset clean area in each division plan. solution, which can improve the cleaning efficiency of the entire cleaning task.
- the cost value corresponding to cleaning the preset cleaning area 1is 2, and the cost value of cleaning the preset cleaning area 2 and the preset cleaning area 3 is both 1, so the division plan 1 and the division plan 2
- the determination of the cost value corresponding to the preset cleaning areais not limited to this. Further consideration can be given to the cost value. For example, the farther the distance between the backwash point and the door of the room where the robot is, the greater the cost value, and the higher the cost value. The higher the value, such as 3, 4 or 5; for example, as shown in Figure 70, the distance between the backwash point a of the preset cleaning area 1 of the cleaning robot in division scheme 1 and the doorway B of room 2 is greater than In the division plan 2, the cleaning robot cleans the distance between the backwash point a of the preset cleaning area 1 and the doorway B of the room 2. Therefore, the cost value corresponding to the preset cleaning area 1 in the division plan 1 is greater than the preset cleaning in the division plan 2. The value corresponding to area 1.
- the roomcontains at least two, and the dividing line of the room is determined based on the workload value range and the graphical characteristics, so that the dividing line and the room
- the boundaryforms at least two preset cleaning areas, including: when the magnitude of the workload in the first room is less than the minimum value of the workload value range, and the magnitude of the workload in the first room and the magnitude of the workload in the second room are The sum of the magnitudes of the quantities is greater than the upper limit value, and the dividing line of the second room is determined according to the workload value range and the graphical characteristics of the second room, so that the dividing line and the The boundary of the second room forms at least two areas, and the sum of the magnitude of the workload of at least one area and the magnitude of the workload of the first room is less than or equal to the upper limit; the at least An area and the area of the first room are determined as a preset cleaning area.
- room 2can be divided into an area of 3 square meters and an area of 5 square meters. area; by merging the 3 square meters area of Room 1 and Room 2 as a preset cleaning area, the number of times the cleaning robot returns to the base station for maintenance can be reduced. For example, instead of returning to the base station after cleaning 3 square meters of room 1, you return to the base station after cleaning 3 square meters of room 2, then returning to the base station after cleaning another 5 square meters of room 2, and cleaning 7 square meters of room 3.
- the position of the cleaning robotthat is, the back-washing point
- the position of the cleaning robotcan be placed in the place where the room happens to be cleaned, such as the door of the room; so that the return
- the impact of the base station's actions on cleaning path planningis reduced, which reduces the cost of cleaning compared to division scheme 3 and can improve cleaning efficiency.
- the remaining areacan continue to be divided by dividing lines. Please refer to Figure 68. After dividing a 6 square meter preset cleaning area in a 48 square meter room, the workload of the remaining area of 42 square meters is greater than the upper limit. You can continue to clean the remaining area through the dividing line. divide.
- the magnitude of the workload of each of the preset cleaning areasis less than or equal to the upper limit value, and greater than or equal to the lower limit value in the workload value range.
- itcan solve the problem that the cleaning robot needs to frequently return to the base station for maintenance because the area of the preset cleaning area is too small.
- itcan also solve the problem of insufficient cleaning power of the cleaning robot because the area of the preset cleaning area is too large. Therefore, problems that affect the cleaning effect of the cleaning robot can be reduced, that is, the frequency of maintenance of the cleaning robot can be reduced, the performance of the cleaning robot can be fully utilized, and the cleaning efficiency of the cleaning robot can be ensured.
- the magnitude of the workload of only one of the preset cleaning areasis less than the lower limit
- the cleaning sequence of the preset cleaning area whose magnitude of the workload is less than the lower limitis in After other preset cleaning areas.
- the workload of the remaining areaswhen the room is divided into one or more preset cleaning areas with a workload within the workload value range, the workload of the remaining areas, if the area is less than the lower limit, can be Treat the remaining area as a separate preset cleaning area, and divide the preset cleaning area 4 in Scheme 3 as shown in Figure 70.
- the remaining areacan be separated from the adjacent area.
- the preset cleaning areasare merged; when the workload of the merged area is greater than the upper limit, the merged area can also be divided according to the workload value range to obtain the workload value in the Preset cleaning area within the workload value range.
- the dividing line of the roomis determined based on the workload value range and the graphical characteristics, so that the dividing line and the boundary of the room divide at least two predetermined
- the methodfurther includes: when there are at least two obstacles in the preset cleaning area, marking the preset cleaning area as an obstacle-dense area, or determining in the preset cleaning area The obstacle-dense area.
- an obstacle-dense areamay be a restaurant or other area where there are many scattered stool legs that need to be avoided, but of course it is not limited to this. It is understandable that it takes a long time to clean areas with dense obstacles. If the areas with concentrated obstacles are not aggregated into one area, the cleaning robot will clean around the obstacles when it detects them, and the cleaning robot will go back and forth. Movement, unable to focus on handling obstacles, the path is messy, and controllability is not high. Referring to Figures 72 and 73, the cleaning robot cleans the preset cleaning area along an arcuate path. As shown, there are four obstacles S1 to S4 on the left side of the preset cleaning area.
- the trajectories of the cleaning robot when cleaning the preset cleaning areaare trajectories 1-8.
- trajectory 1encounters the obstacle S1, it needs to go around the obstacle S1 clockwise to obtain trajectory 2.
- trajectory 3encounters obstacle S2, it is necessary to circle clockwise around obstacle S2, that is, trajectory 4 is obtained
- trajectory 5encounters obstacle S2, it is necessary to circle clockwise around obstacle S2.
- the trajectory 5reaches the left side of the preset cleaning area, part of the area on the left side of the preset cleaning area has not been cleaned yet. When cleaning this part of the area, it encounters the obstacle S3 and circumvents the obstacle S3 clockwise.
- Embodiments of the present applicationcan aggregate areas with concentrated obstacles into dense obstacle areas for separate processing, allowing the cleaning robot to first clean a preset cleaning area without obstacles or clean only a small number of obstacles or scattered obstacles. Reducing the movement around obstacles in this area can ensure that the cleaning robot has high controllability, quickly completes cleaning of most areas, and then cleans areas where obstacles are concentrated.
- the obstacle-dense areais the preset cleaning area that is cleaned last among the at least two preset cleaning areas.
- cleaning the preset cleaning areas in non-obstacle-dense areascleaning the obstacle-dense areas in a concentrated manner is more in line with the user's understanding of cleaning.
- the cleaning of non-obstacle areaswill not be interrupted, and most of the areas can be cleaned as quickly as possible. area, the user experience is better.
- the dividing line of the roomis determined according to the workload value range and the graphical characteristics, so that the dividing line and the boundary of the room are divided
- Finding at least two preset cleaning areasincludes: determining the obstacle-dense area in the room according to the distribution of obstacles in the room, such as area S of room 3 in Figure 71; when all the obstacles in the room are removed
- the dividing line of the roomis determined according to the workload value range, so that the dividing line and the The boundaries of the room and the boundaries of the obstacle-dense area divide at least two preset cleaning areas. That is, you can also divide the obstacle-dense areas in the room first, and then divide the remaining areas to obtain other preset cleaning areas.
- each unit areais a unit area in the obstacle-dense area. For example, the unit area whose distance from the obstacle is less than a preset distance threshold constitutes the unit area. Areas with dense obstacles.
- the cleaning area division method of the cleaning robotincludes: obtaining the graphical characteristics of the room, and the graphical characteristics include the boundaries of the room; obtaining the workload value range; and determining according to the workload value range and the graphics characteristics.
- the dividing line of the roomso that the dividing line and the boundary of the room form at least two preset cleaning areas, and the workload of each preset cleaning area is less than or equal to the upper limit of the workload value range, and is greater than or Equal to the lower limit value in the workload value range; or there is only one preset cleaning area whose workload value is less than the lower limit value, and the workload value is less than the lower limit value
- the cleaning sequence of the preset cleaning areais after the other preset cleaning areas; this allows the cleaning robot to achieve better cleaning effects and higher cleaning efficiency when cleaning the room according to the preset cleaning area. .
- FIG. 74is a schematic flowchart of the control method of the cleaning robot provided by the embodiment of the present application.
- the control method of the cleaning robotcan be applied in a cleaning system to control the cleaning robot in the system so that the cleaning robot performs cleaning tasks, such as cleaning the area corresponding to the cleaning task map.
- the control method of the cleaning robotincludes steps S210 to S220.
- the cleaning robotis controlled to clean the room according to the preset cleaning areas.
- the order in which the preset cleaning areas are dividedcan be determined based on the cleaning order of multiple rooms.
- the cleaning robotAfter the cleaning robot completes cleaning any of the preset cleaning areas, it moves to the base station for maintenance, such as cleaning cleaning parts, such as mopping parts, cleaning dirt in the dust box, charging, and cleaning. At least one of replenishing or draining the water tank of the robot.
- FIG. 24is a schematic block diagram of the control device 300 provided by the embodiment of the present application.
- the control device 300includes a processor 301 and a memory 302.
- the processor 301is used to run a computer program stored in the memory 302, and implement the following steps when executing the computer program:
- the dividing line of the roomis determined so that the dividing line and the boundary of the room form at least two preset cleaning areas, each of the preset cleaning areas
- the magnitude of the workload in the areais less than or equal to the upper limit of the workload value range, and greater than or equal to the lower limit of the workload value range; or there is only one preset cleaning area.
- the magnitude of the workloadis less than the lower limit value, and the cleaning sequence of the preset cleaning area whose magnitude value of the workload is less than the lower limit value is after the other preset cleaning areas.
- the processor 301is used to run a computer program stored in the memory 302, and implement the following steps when executing the computer program:
- the cleaning robotis controlled to clean the room according to the preset cleaning area.
- control device on the base stationsuch as the base station controller
- the control device on the cleaning robotsuch as the robot controller
- the control device on the base stationcan be used to implement the steps of the method in the embodiment of the present application.
- embodiments of the present applicationalso provide a base station, which is at least used to maintain the cleaning robot, for example, to clean the mopping parts of the cleaning robot.
- the base stationalso includes a control device, such as a base station controller. , steps used to implement the method of the embodiment of the present application.
- Embodiments of the present applicationalso provide a computer-readable storage medium.
- the computer-readable storage mediumstores a computer program.
- the processorcan implement the steps of the above method.
- the computer-readable storage mediummay be an internal storage unit of the control device described in any of the preceding embodiments, such as a hard disk or memory of the control device.
- the computer-readable storage mediummay also be an external storage device of the control device, such as a plug-in hard disk, a smart memory card (Smart Media Card, SMC), or a secure digital (SD) equipped on the control device. ) card, Flash Card, etc.
- Figure 2is a schematic diagram of a cleaning system provided by an embodiment of the present application.
- Cleaning systemincludes:
- Cleaning robot 100includes a walking unit 106 and a cleaning piece 10.
- the walking unit 106is used to drive the cleaning robot 100 to move so that the cleaning piece 10 mops the ground;
- the base station 200is at least used to perform maintenance on the cleaning robot 100, such as cleaning or replacing the mopping parts of the cleaning robot 100;
- Cleaning robotsare used to replace people's personal cleaning of home environments or large places. Not only It can reduce people's work pressure and improve cleaning efficiency.
- cleaning robotsare usually equipped with special sensor devices to detect the floor.
- ultrasonic wavesare used to detect the material of the floor and then identify the floor type.
- the related technologyonly involves how to use ultrasonic waves to detect and confirm the ground medium.
- the ground mediumis detected to be a special medium such as carpet, it does not involve how to adjust the response mode of the cleaning robot for the special medium.
- Embodiments of the present applicationprovide a ground medium exploration method, cleaning robot and storage medium. Among them, this method is applied to a cleaning robot, which can be a sweeper or other intelligent robot, and is not limited here.
- Figure 75is a schematic flow chart of a ground medium exploration method provided by an embodiment of the present application.
- the ground medium exploration methodincludes steps S10 to S11.
- Step S10When the cleaning robot detects the preset ground medium, obtain the status information of the cleaning robot, and determine the edge exploration mode according to the status information, wherein the edge exploration mode includes an inner edge exploration mode and an outer edge exploration mode. Edge exploration mode;
- the preset floor mediaincludes carpets, floor mats, children's climbing mats, and mats laid on the ground.
- the preset floor mediacan also be laid for other cleaning robots that require special treatment when encountering them.
- the medium on the groundis not limited here.
- the outer edge exploration modemeans that the cleaning robot performs edge exploration on the preset ground medium outside the preset ground medium.
- the orthographic projection of the geometric center of the cleaning robotdoes not Falling into the orthographic projection of the preset ground medium, this is used to control the activity range of the cleaning robot during the outer edge exploration process to reduce the extent to which the mopping part wets or soils the preset ground medium area;
- the inner edge exploration modemeans that the cleaning robot moves The preset ground medium is explored along the inside of the preset ground medium.
- at least part of the trajectory formed by the orthographic projection of the geometric center of the cleaning robotcoincides with the orthographic projection of the preset ground medium.
- the cleaning robotis in the outer edge exploration mode.
- the overlap between the orthographic projection of the robot and the orthographic projection of the preset ground mediumis less than 5% of the orthographic projection of the robot. 10. This reduces the extent to which the mopping part wets or soils the preset floor media area; the cleaning robot is in the inner edge exploration mode, and when it performs edge exploration inside the preset floor media, the orthographic projection of the cleaning robot is consistent with the preset floor media.
- the overlapped portion of the orthographic projectionsis greater than or equal to 50% of the orthographic projection of the robot.
- the cleaning robotmay encounter a preset floor medium while moving or performing a cleaning task without special handling, the cleaning robot or the preset floor medium may be damaged.
- the cleaning robotmay get stuck on the carpet when moving on the carpet. If the cleaning robot is currently performing a mopping task, the cleaning robot may wet the carpet during the mopping process. .
- the cleaning robotcan use a variety of technical means to detect whether it encounters a preset floor medium.
- the following descriptiontakes the preset ground medium as a carpet.
- the cleaning robotcan detect the carpet through an ultrasonic sensor.
- the cleaning robotWhen the cleaning robot detects the preset floor medium during movement, it means that the cleaning robot may have reached or is close to the edge of the preset floor medium. At this time, the cleaning robot can select the edge exploration mode according to the status information to explore the preset ground medium. After determining the position and contour of the preset ground medium through edge exploration, the cleaning robot can avoid detours or clean the ground medium based on the position and contour of the preset ground medium when planning its travel trajectory or cleaning trajectory.
- the methodfurther includes:
- the cleaning robotdetects the preset ground medium during movement, if the cleaning robot is currently in a state of constructing a cleaning area map, the preset ground medium will not be explored along the edge.
- the cleaning robot 1determines the moving route and cleaning trajectory based on the cleaning area map. If the cleaning robot 1 is newly purchased, before the cleaning robot performs the cleaning task, it needs to explore the surrounding environment to build an initial cleaning Area map. In order to improve the efficiency of mapping, if the cleaning robot 1 detects the preset ground medium during this process, the preset ground medium will not be explored along the edge.
- the methodfurther includes:
- the cleaning robotdetects the preset floor medium during movement, if the contour information of the preset floor medium is recorded in the cleaning area map of the cleaning robot, the preset floor medium will not be edged. explore.
- the cleaning area mapis a map used by the cleaning robot to plan a moving path or a cleaning path.
- the methodfurther includes:
- the cleaning robotis controlled to explore the preset ground medium along the edge to update the outline information of the preset ground medium in the cleaning area map according to the exploration results. .
- the working environment of the cleaning robotis dynamic, and through the technical solution provided by this embodiment, the cleaning work map can be updated regularly.
- obtaining status information of the cleaning robot and determining an edge exploration mode based on the status informationincludes:
- the status information of the cleaning robotcan be configuration information, or it can be the peripheral information (such as obstacles, cliffs and other special terrain distribution) obtained by the cleaning robot through sensors (such as lidar, cliff sensors, visual sensors, etc.) environmental information.
- peripheral informationsuch as obstacles, cliffs and other special terrain distribution
- sensorssuch as lidar, cliff sensors, visual sensors, etc.
- the configuration informationwhen the cleaning robot determines the edge exploration mode through configuration information, the configuration information includes the working mode and/or the floor medium cleaning function state of the cleaning robot.
- the cleaning robotdetermines the edge exploration mode strategy as shown in Table 1 below:
- the edge exploration modeis the inner edge exploration mode; when the cleaning robot's working mode is the mopping mode, determine the edge exploration mode to be the outer edge exploration mode; when the cleaning robot's working mode is the sweeping and mopping mode, and the floor media cleaning function is on,
- the edge-edge exploration modeis determined to be the inner edge-edge exploration mode; when the cleaning robot's working mode is the sweeping and mopping mode, and the ground media cleaning function is turned off, the edge-edge exploration mode is determined to be the outer edge exploration mode.
- the cleaning robotwhen the cleaning robot determines the edge exploration mode through environmental information, it can obtain the distribution of obstacles on the preset ground medium through the environmental information, and determine the number and distribution positions of obstacles on the preset ground medium. To determine the edge exploration mode to improve the robot's exploration efficiency.
- the outer edge exploration modeis selected to explore the preset ground medium; and if the number of obstacles on the preset ground medium is less than or equal to When the number is preset, select the inner edge exploration mode to explore the preset ground medium; or, if the obstacles on the preset ground medium are close to the edge of the preset ground medium and thus affect the movement of the cleaning robot, select the outer edge
- the exploration modeis used to explore the preset ground medium; and if the position of the obstacle on the preset ground medium is far away from the edge of the preset ground medium and does not affect the movement of the cleaning robot, then the inner edge exploration mode is selected to explore the preset ground medium.
- Step S11Perform edge exploration on the preset ground medium according to the edge edge exploration mode to obtain the outline of the preset ground medium.
- the outer edge exploration or the inner edge exploration of the preset ground mediumcan be performed according to the edge exploration mode, and the outline of the preset ground medium can be determined during the exploration process.
- the integrity of the contour of the preset ground medium determined by the cleaning robot after using the inner edge exploration mode to explore the preset ground mediumis higher.
- the cleaning robotuses the outer edge exploration mode to explore the preset ground medium, the obstacles may hinder the cleaning robot's exploration behavior, making it impossible to obtain the complete outline of the preset ground medium.
- the edge exploration modeis the outer edge exploration mode
- the cleaning robotexplores the outer edge of the preset floor medium, which can reduce the extent to which the mopping member wets or soils the preset floor medium area. For example, if the cleaning robot is in mopping mode, and if the cleaning robot adopts the inner edge exploration mode when detecting the preset ground medium, it will wet a large area or even contaminate the preset ground medium.
- the contourrefers to the boundary of the preset ground medium obtained by fitting the contour points of the edge of the preset ground medium, or the boundary obtained by expanding the preset size outward according to the boundary. It is understandable that there will be a certain degree of lag in the detection results of the cleaning robot's sensor. The boundary obtained by fitting the detected contour points and expanding outward to the preset size will be more accurate and more in line with the actual situation.
- the outline of the preset ground mediumcan be determined. After the outline of the preset ground medium is updated to the cleaning area map of the cleaning robot, the cleaning robot will subsequently plan according to the cleaning area map. When selecting a path, you can plan a detour path or a preset ground media cleaning path based on the contour of the preset ground medium.
- the edge-edge exploration modewhen the edge-edge exploration mode is the inner edge-edge exploration mode, the edge-edge exploration is performed on the preset ground medium according to the edge-edge exploration mode to obtain the outline of the preset ground medium. , including: when the cleaning robot detects the preset ground medium, controlling the cleaning robot to perform an inner edge exploration task to obtain the contour points of the preset ground medium until the cleaning robot reaches the first Contour point position.
- the first contour point positionis the coordinates of the cleaning robot when it obtains the first contour point.
- the cleaning robotWhen the coordinates of the cleaning robot are equal to the coordinates of the cleaning robot when it obtains the first contour point, the cleaning robot obtains the first contour point.
- the coordinates of the robotcoincide with each other or are a predetermined distance away, it can be determined that the cleaning robot has reached the first contour point position again.
- the coordinates of the cleaning robotmay be determined by the coordinates of sensors detecting floor media.
- FIG. 77is a schematic diagram of a scene in which a cleaning robot performs inner edge exploration on a preset ground medium according to an embodiment of the present application.
- the cleaning robotin the process of the cleaning robot 1 entering the preset ground medium area range 2 from the non-preset floor medium area, when the cleaning robot detects the preset ground medium, the cleaning robot is controlled to execute the inner edge edge.
- the exploration taskis to obtain the contour points of the preset ground medium until the cleaning robot reaches the first contour point position again.
- the first contour point positionis the position where the cleaning robot obtains the first contour point. It can be understood that when the cleaning robot reaches the first contour point again, it means that the cleaning robot has returned to the position where the first contour point was detected, and the exploration path for the preset ground medium has formed a closed loop, that is, the cleaning robot has completed the preset ground medium. exploration.
- the cleaning robotwhen the cleaning robot reaches the first contour point again, it is not limited to the cleaning robot having to return to a position coinciding with the first contour point.
- the distance between the cleaning robot and the first contour pointis less than the preset distance threshold, It can also be determined that the cleaning robot has reached the first contour point again.
- controlling the cleaning robot to perform an inner edge exploration task to obtain contour points of the preset ground mediumincludes: controlling the cleaning robot to perform a first predetermined action until the cleaning robot detects Non-preset ground medium; control the cleaning robot to rotate in the first direction, and when the cleaning robot detects the preset ground medium again, obtain the current coordinates of the cleaning robot and mark them as the contour points; control The cleaning robot travels at a predetermined angular speed and a predetermined linear speed. When the cleaning robot detects the non-preset ground medium again, the step of controlling the cleaning robot to rotate in the first direction is repeatedly performed to obtain the required information. Describe the contour points.
- the edge-edge exploration modeis the inner edge-edge exploration mode
- the cleaning robot 1is already located in the media area corresponding to the preset ground medium 2
- the position of the edgeso that it can be determined that the next behavior of the cleaning robot 1 is an effective edge exploration behavior.
- the cleaning robotnext detects the preset ground medium
- the coordinatesare close to the edge of the preset ground medium. Only when the cleaning robot 1 is close to the preset ground medium
- the coordinates when the cleaning robot detects the preset ground mediumcan be determined as the outline point of the preset ground medium.
- the cleaning robotcan be controlled to perform the first predetermined action until the cleaning robot detects the non-preset ground medium. Preset the ground medium. At this time, it can be determined that the current position of the cleaning robot is close to the edge of the preset ground medium to ensure that the points detected during the subsequent exploration behavior of the cleaning robot are contour points; as shown in Figure 77(b), determine When the position of the current cleaning robot is close to the edge of the preset ground medium, the cleaning robot is controlled to rotate in the first direction, as shown in Figure 77(c).
- the cleaning robotWhen the cleaning robot detects the preset ground medium again, it can be determined that the coordinates of the current cleaning robot can be Marked as the first contour point, as shown in Figure 77(d), the cleaning robot is then controlled to travel at a predetermined angular speed and a predetermined linear speed, so that the cleaning robot first moves away from and then approaches the edge of the preset ground medium according to the arc path.
- the edge-side exploration modeis an inner edge-edge exploration mode.
- the cleaning robotcan choose the direction of edge exploration. Specifically, the left edge or the right edge.
- the left edgerefers to the traveling direction of the cleaning robot as a reference.
- the left side of the cleaning robotis close to the preset direction.
- the edge of the ground mediumperforms an inner edge exploration task.
- the exploration directionis the left edge
- the first directionis clockwise with the cleaning robot as a reference
- the exploration directionis the right edge
- the first directionis counterclockwise with the cleaning robot as a reference. .
- the cleaning robotafter controlling the cleaning robot to rotate in the first direction and determining that the cleaning robot is located on the preset ground medium and close to the edge of the preset ground medium, the cleaning robot can also be controlled to rotate at a predetermined angular speed and a predetermined linear speed. Traveling, and the angular velocity gradually decreases, as long as the cleaning robot can explore in a direction close to the preset ground medium, there is no limit here.
- controlling the cleaning robot to travel at a predetermined angular speed and a predetermined linear speed, and the angular speed gradually decreasescan enable the cleaning robot to gradually expand the exploration range in a spiral shape with the cleaning robot as the center, and ensure that the cleaning robot can explore unpredicted areas.
- Setting the ground mediumensures that the cleaning robot can approach the inner edge of the preset ground medium again, so as to smoothly carry out the next exploration action and continue to explore the preset ground medium.
- controlling the cleaning robot to perform a first predetermined action until the cleaning robot detects a non-preset floor mediumincludes: controlling the rotation of the cleaning robot, obtaining the angle of rotation of the cleaning robot in real time and The detection result of the cleaning robot on the ground medium is determined to be that the non-preset ground medium is detected and the angle of rotation of the cleaning robot is determined to be less than 180°, and the cleaning is controlled.
- the edge-edge exploration modeis the inner edge-edge exploration mode, in order to update Quickly make the cleaning robot go to the edge of the preset ground medium, you can control the rotation of the cleaning robot, and quickly determine whether the current position of the cleaning robot is close to the edge of the preset ground medium, as shown in Figure 76 (a)-(b) when the cleaning robot detects When reaching a non-preset ground medium and the rotation angle is less than 180°, it can be determined that the current position of the cleaning robot is close to the edge of the preset ground medium.
- the cleaning robotcan be controlled to stop rotating; as shown in Figure 76(c)-(e) , if the non-preset ground medium is still not detected when the cleaning robot's rotation angle reaches 180°, it can be determined that the current cleaning robot is already on the preset ground medium. At this time, the cleaning robot can be controlled to stop rotating and control the cleaning robot to move in the current direction. Go straight until the cleaning robot detects a non-preset ground medium and determines that the current position of the cleaning robot is close to the edge of the preset ground medium. The cleaning robot can be controlled to stop traveling for the next inner edge exploration behavior.
- the cleaning robot 1when the cleaning robot 1 performs an exploration task, if it is determined that the current edge-edge exploration mode is the inner edge-edge exploration mode, after detecting the preset ground medium, the cleaning robot 1 can be controlled to rotate to quickly determine the cleaning Whether the current position of the robot is close to the edge of the preset ground medium. During the rotation of the cleaning robot, when the cleaning robot detects non-preset ground medium and the rotation angle is less than 180°, it can be determined that the current position of the cleaning robot is close to the preset ground.
- the cleaning robotcan be controlled to stop rotating; if the cleaning robot still does not detect the non-preset ground medium when the rotation angle reaches 180°, it can be determined that the current cleaning robot is already on the preset ground medium, and the cleaning robot can be controlled at this time.
- the cleaning robotstops rotating and controls the cleaning robot to move straight in the current direction until the cleaning robot detects a non-preset ground medium.
- the cleaning robotcan be controlled to stop traveling; after determining the cleaning After the current position of the robot is close to the edge of the preset ground medium, the cleaning robot 1 is controlled to rotate in the first direction until the cleaning robot detects the preset ground medium, and the current coordinates of the cleaning robot are obtained and marked as the first contour point; then the cleaning robot is controlled Traveling at a predetermined angular speed and predetermined linear speed, the cleaning robot gradually approaches the edge of the preset ground medium along an arc path. When the cleaning robot detects non-preset ground medium again, it indicates that the cleaning robot is again close to the edge of the preset ground medium.
- the predetermined angular velocitycan be controlled to gradually decrease. It can be understood that the cleaning robot travels at a predetermined angular velocity and a predetermined linear velocity, and the angular velocity gradually decreases.
- the preset trajectory of the preset ground mediumcan be detected. It is a spiral trajectory, which allows the cleaning robot to explore a range that gradually expands in a spiral shape with the cleaning robot as the center, ensuring that the cleaning robot can explore the preset ground medium signal. When the angular speed remains unchanged, the preset trajectory is an arc.
- the trajectorycan also be designed as other trajectories according to the needs of the situation, and there is no restriction here.
- the direction of the predetermined angular velocityis determined by the first direction. Specifically, when the first direction is clockwise with the cleaning robot as a reference, the direction of the predetermined angular velocity is vertically outward; when the first direction is counterclockwise with the cleaning robot as a reference, The direction of the predetermined angular velocity is vertically inward.
- the cleaning robotis provided with at least one of a brushing element and a mopping element, wherein the brushing element includes a side sweeping element and/or a middle sweeping element;
- the methodfurther includes:
- the mopping memberis controlled to enter an off-the-ground state.
- Figure 78is a schematic structural diagram of a cleaning robot provided by an embodiment of the present application.
- the cleaning robot 1is provided with a brushing component and a mopping component 12 .
- the brushing componentincludes a side scanning component 10 and a middle scanning component 11 .
- the side scanning component 10is used to sweep the coverage area of the cleaning robot.
- the middle sweeping part 11is used to sweep the garbage in the middle area of the cleaning robot's coverage area, while the mopping part 12 is used to mop the cleaning robot's coverage area.
- the edge scanner 10is controlled to enter the stowed state, and the center The scanning part 11 enters the off-the-ground state, which can prevent the cleaning robot 1 from being entangled in the carpet when the side scanning part 10 and the middle scanning part 11 are entangled in the carpet, causing the cleaning robot 1 to be unable to enter the carpet; in addition, the cleaning robot 1
- the mopping element 12By controlling the mopping element 12 to also enter the off-the-ground state, it can be avoided that the mopping element 12 wets the carpet after the cleaning robot 1 enters the medium area range 2 .
- the cleaning robotis also provided with a fan component, and the fan component is used to suck garbage.
- the methodBefore controlling the cleaning robot to enter the media area corresponding to the preset floor media, the method also includes include:
- the fan speed of the fan componentis reduced, and the cleaning robot is controlled to enter the media area corresponding to the preset floor medium.
- the applicant's researchfound that when the cleaning robot 1 controls the middle scanning part 11 and the mopping part 12 to enter the off-the-ground state, the garbage adhered to the middle scanning part 11 or the mopping part 12 may fall to the ground. .
- controlling the cleaning robot to stay in place for a preset time and increasing the fan speed of the fan unitallows the fan to suck away the garbage falling from the scanning unit 11 or the mopping unit 12 to avoid secondary pollution.
- the fan speed of the fan unitcan be reduced and the cleaning robot can be controlled to enter the media area range 2.
- the preset durationcan be set to 5 seconds, 10 seconds, or 15 seconds.
- the preset durationcan also be set to other durations according to the needs of the situation, and there is no limit here.
- the methodfurther includes: controlling the middle scanning element to enter a ground-close working state, and increasing the fan speed. The fan speed of the piece.
- the middle scanning part 11is controlled to enter the ground-close working state. Then during the movement of the cleaning robot 1, the middle scanning part 11 can clean the preset ground medium; and the fan part is increased The fan speed allows the cleaning robot 1 to clean the preset floor medium more cleanly.
- the cleaning robotis further provided with a driving member for driving the cleaning robot. After controlling the cleaning robot to enter the media area corresponding to the preset floor medium, the method further includes:
- the cleaning robotis further provided with a driving member for driving the cleaning robot. After controlling the cleaning robot to enter the media area corresponding to the preset floor medium, the method further includes:
- the cleaning robotis controlled to issue a warning.
- the driving memberis used to drive the cleaning robot 1 to perform moving operations such as forward, turning, or retreating.
- the cleaning robot 1After entering the media area range 2, the cleaning robot 1 starts to monitor whether the driving part is slipping and getting stuck, and records the number of times the driving part is slipping as the number of slips, and records the number of times the driving part is getting stuck as The number of times the driver is stuck.
- the first preset number of timescan be set to 2, 3, or 5 times
- the second preset number of timescan be set to 2, 3, or 5 times
- the first preset number of times and the second preset number of timescan be set to 2, 3, or 5 times
- the preset number of timescan also be set to other times according to the needs of the situation, and there is no limit here.
- the methodfurther includes:
- the cleaning robotWhen the cleaning robot is equipped with the brush scanning part, monitor whether the side scanning part triggers current threshold protection, and record the number of times the middle scanning part gets stuck when the middle scanning part becomes stuck;
- the cleaning robotis controlled to issue a warning.
- the cleaning robot 1After the cleaning robot 1 enters the media area range 2, it starts to monitor whether the side scanned parts trigger the current threshold protection, and detects whether the middle scanned parts are stuck. When the middle scanned parts are stuck, it records that the middle scanned parts are stuck. The number of jams in the situation is regarded as the number of jams in the middle sweep.
- the middle scanning piece 11is jammed within the media area 2 , it may cause damage to the cleaning robot 1 . Therefore, when the cleaning robot 1 finds that the number of times the middle scan is stuck is greater than the third preset number, a warning reminder is issued, so that the user who is aware of the warning reminder can help the cleaning robot 1 get out of the predicament and avoid damaging the cleaning robot 1.
- the third preset number of timescan be set to 2 times, 3 times or 5 times, and can also be set to other times according to the needs of the situation, which is not limited here.
- the cleaning robot 1when it provides a warning reminder, it may use a sound reminder, a vibration reminder, a light reminder, or push a message through a terminal smart device such as a mobile phone.
- a terminal smart devicesuch as a mobile phone.
- other reminder methodsmay be adopted according to the needs of the situation. , there is no restriction here.
- the edge exploration of the preset ground medium according to the edge edge exploration mode to obtain the outline of the preset ground mediumincludes: when the cleaning robot detects the preset ground medium for the first time. When presetting the ground medium, mark the current position of the cleaning robot as the first contour point position; control the cleaning robot to perform an outer edge exploration task to obtain the contour points of the preset ground medium until the cleaning robot returns again The first contour point position is reached. It can be understood that when the cleaning robot reaches the first contour point again, it means that the cleaning robot has returned to the position where the first contour point was detected, and the exploration path for the preset ground medium has formed a closed loop, that is, the cleaning robot has completed the preset ground medium. exploration.
- the cleaning robotwhen the cleaning robot reaches the first contour point again, it is not limited to the cleaning robot having to return to a position coinciding with the first contour point.
- the distance between the cleaning robot and the first contour pointis less than the preset distance threshold, It can also be determined that the cleaning robot has reached the first contour point again.
- controlling the cleaning robot to perform an outer edge exploration task to obtain contour points of the preset ground mediumincludes: controlling the cleaning robot to perform a second predetermined action, wherein when the cleaning When the robot completes the second predetermined action, the ground medium detected by the cleaning robot is a non-preset ground medium; the cleaning robot is controlled to travel at a predetermined angular speed and a predetermined linear speed.
- the cleaning robotdetects the ground medium again, When presetting the ground medium, obtain the current coordinates of the cleaning robot and mark them as the contour points; repeat the step of controlling the cleaning robot to perform the second predetermined action to continue to obtain the contour points.
- the cleaning robot's edge exploration modeis the outer edge exploration mode.
- the cleaning robot 1detects the preset ground medium for the first time, and records the cleaning robot 1's The current position is the first contour point, and then the cleaning robot is controlled to perform a second predetermined action to ensure that the cleaning robot is located outside the preset ground medium, and the current position of the cleaning robot is close to the edge of the preset ground medium to ensure that the cleaning robot 1
- the next behavioris an effective edge-side exploration behavior.
- the points detected during the next exploration behavior of the cleaning robotcan be determined as contour points; it is determined that the current cleaning robot is located outside the preset ground medium and is located close to the preset ground medium.
- the cleaning robotAfter the edge position is reached, the cleaning robot is controlled to travel at a predetermined angular speed and a predetermined linear speed, so that the cleaning robot gradually approaches the edge of the preset ground medium along a curved path.
- the cleaning robotdetects the preset ground medium again, it indicates that the cleaning robot is again
- the contour pointis detected, and so on, and the steps of controlling the cleaning robot to perform the second predetermined action are repeated to determine the position where the cleaning robot is located outside the preset ground medium and close to the edge of the preset ground medium (i.e., the cleaning robot detects the preset
- the sensor of the ground mediumis located outside the preset ground medium and is located close to the edge of the preset ground medium), thereby continuing to control the cleaning robot to travel at a predetermined angular speed and a predetermined linear speed, and so on in a cycle to continue to obtain other contour points.
- the cleaning robotafter determining that the current cleaning robot is located outside the preset ground medium and is located close to the edge of the preset ground medium, the cleaning robot can also be controlled to travel at a predetermined angular speed and a predetermined linear speed, and the angular speed gradually Reduce, as long as the cleaning robot can explore in a direction close to the preset ground medium, there is no limit here. It can be understood that controlling the cleaning robot to travel at a predetermined angular speed and a predetermined linear speed, and gradually reducing the angular speed, can allow the cleaning robot to explore a range that gradually expands in a spiral shape with the cleaning robot as the center, ensuring that the cleaning robot can explore the preset ground. medium, which ensures that the cleaning robot can detect the contour points of the preset ground medium again, so as to smoothly carry out the next exploration action and continue to explore the preset ground medium.
- the second predetermined actionis to control the cleaning robot to retreat until the cleaning robot detects the non-preset floor medium, and then continue to retreat a predetermined distance; or to control the cleaning robot to rotate in a predetermined direction. until the cleaning robot detects the non-preset floor medium; or controls the cleaning robot to retreat until the cleaning robot detects the non-preset floor medium, then continues to retreat a predetermined distance, and then controls the cleaning robot Rotate a predetermined angle in a predetermined direction.
- the edge-along exploration modeis an outer edge-edge exploration mode.
- the cleaning robotcan choose the direction of edge exploration. Specifically, the left edge or the right edge.
- the left edgerefers to the direction of travel of the cleaning robot as a reference.
- the left side of the cleaning robotis close to It is preset that the edge of the ground medium performs the outer edge exploration task.
- the exploration directionis the left edge
- the direction of rotation of the predetermined angle in the second predetermined actionis clockwise rotation
- the change trend of the linear speed direction of the cleaning robotis counterclockwise.
- the angular velocity directionis vertical to the cleaning surface (i.e., the ground) outward; as shown in Figure 79(d)-(f), when the exploration direction is the right edge , the direction of the predetermined angle of rotation in the second predetermined action is counterclockwise rotation, the changing trend of the linear velocity direction of the cleaning machine is clockwise (that is, the extending direction of the curved trajectory of the cleaning robot is clockwise), and the angular velocity The direction is vertical to the robot plane and outward.
- FIG. 79is a schematic diagram of a scene in which a cleaning robot performs outer edge exploration on a preset ground medium according to an embodiment of the present application.
- the cleaning robot 1detects the preset ground medium 2 for the first time, and records the current position of the cleaning robot 1 as the first contour point. If there are no obstacles on the edge of the media area range 2 of the preset ground medium, the cleaning robot 1 can move around the edge of the media area range 2 and return to the first contour point, or when the distance between the cleaning robot and the first contour point When the distance is less than the preset distance threshold, the exploration task is completed.
- part of the bodymay enter the medium area range 2, and the cleaning robot 1 is controlled to perform the second predetermined action.
- the cleaning robot 1completes the second predetermined action, the cleaning robot is located on the preset ground Outside the media area range 2 of the medium, that is, the cleaning robot 1 detects a non-preset ground medium, and then controls the cleaning robot 1 to travel at a predetermined angular speed and a predetermined linear speed.
- the cleaning robot 1detects the preset ground medium again, obtain The current coordinates of the cleaning robot 1 are the contour points, and the second predetermined action is repeatedly performed and the cleaning robot 1 is controlled to travel at a predetermined angular speed and a predetermined linear speed (repeat the steps of Figure 79(d)-(f)) to find the preset ground The next contour point of the medium.
- the cleaning robot 1reaches the first contour point again, or when the distance between the cleaning robot 1 and the first contour point is less than the preset distance threshold, the exploration task is completed.
- the second predetermined actionwhen executing the outer edge exploration mode, may be to control the cleaning robot 1 to retreat until the cleaning robot detects a non-preset ground medium, and then continue to retreat a predetermined distance; the second predetermined action may also be It may be to control the cleaning robot 1 to rotate in a predetermined direction until the cleaning robot 1 detects the non-preset floor medium; as shown in Figure 79(d)-(e), the second predetermined action may also be to control the cleaning robot 1 to retreat until it is cleaned.
- the robot 1When the robot 1 detects the non-preset ground medium, it continues to retreat a predetermined distance, and then controls the cleaning robot 1 to rotate at a predetermined angle in a predetermined direction; by controlling the cleaning robot to retreat a preset distance, it can ensure that the cleaning robot performs at a predetermined angular speed and During the process of traveling at the predetermined linear speed, the mopping member of the cleaning robot is located outside the preset ground medium, that is, the mopping member of the cleaning robot is prevented from entering the medium area while the cleaning robot is traveling at the predetermined angular speed and predetermined linear speed. Wet or contaminate the preset ground medium.
- the preset distance of retreatis related to the longest distance that the orthographic projection of the rotation coverage of the mop exceeds the edge of the cleaning robot; while the predetermined rotation in the predetermined direction
- the anglecan extend the trajectory of the cleaning robot to travel at the predetermined angular speed and predetermined linear speed, that is, the density of contour points explored by the cleaning robot can be reduced, thereby improving the efficiency of outer edge exploration and shortening the time for cleaning robot 1 to complete outer edge exploration.
- the cleaning robotafter determining that the current cleaning robot is located outside the preset ground medium and is located close to the edge of the preset ground medium, the cleaning robot can also be controlled to travel at a predetermined angular speed and a predetermined linear speed, and the angular speed gradually decreases. Small.
- controlling the cleaning robot to travel at a predetermined angular speed and a predetermined linear speed, and the angular speed gradually decreasescan enable the cleaning robot to gradually expand the exploration range in a spiral shape with the cleaning robot as the center, and ensure that the cleaning robot can explore unpredicted areas.
- Setting the ground mediumensures that the cleaning robot can approach the inner edge of the preset ground medium again, so as to smoothly carry out the next exploration action and continue to explore the preset ground medium.
- the cleaning robottravels at a predetermined angular speed and a predetermined linear speed
- the trajectory formed by detecting the preset ground mediumcan be a spiral trajectory, an arc trajectory, or other designs according to the needs of the situation.
- the trajectoryis such as a polyline trajectory and is not limited here.
- edge-edge explorationis performed on the preset ground medium according to the edge-edge exploration mode to obtain the outline of the preset ground medium. , including: when the cleaning robot detects the preset ground medium for the first time, marking the current position of the cleaning robot as the first contour point position; controlling the cleaning robot to perform an outer edge exploration task in the second direction , to obtain the contour points of the preset ground medium;
- the cleaning robotWhen the cleaning robot detects an obstacle, the cleaning robot is controlled to perform a third predetermined action, and the cleaning robot is controlled to perform the outer edge exploration task in a third direction to obtain the outline of the preset ground medium. point, the third direction is opposite to the second direction; when the cleaning robot detects an obstacle again, the outer edge exploration task ends.
- the cleaning robotwhen it detects the preset ground medium for the first time, it marks the current position of the cleaning robot as the first contour point position, and begins to select the left or right edge direction to perform the outer edge exploration task.
- the robotWhen cleaning When the robot detects an obstacle through lidar or a collision sensor, it controls the cleaning robot to perform a third predetermined action and perform an outer edge exploration task in a third direction opposite to the second direction.
- the specific process of obtaining contour pointsis the same as the aforementioned outer edge.
- the exploration tasksare the same and will not be repeated here.
- the outer edge exploration taskends.
- the cleaning robotwhen the cleaning robot is hindered by obstacles when performing the outer edge exploration task, the cleaning robot can be controlled to return to the position where the first contour point was obtained and continue to perform the outer edge exploration task in the opposite direction. In this way, the cleaning robot can maximize the Exploring along the edge of the preset ground medium.
- the third predetermined actionis to make a U-turn on the spot; or to navigate to the first contour point.
- the cleaning robotcan turn around on the spot and continue the outer edge exploration task in the third direction opposite to the second direction, or navigate to the first contour point and then continue the outer edge exploration task in the third direction opposite to the second direction.
- turning around in situ and directly continuing the outer edge exploration taskwill repeatedly explore part of the preset ground media that has been previously explored. Therefore, after the cleaning robot navigates to the first contour point and then continues the outer edge exploration task, it is better than turning around in situ and directly continuing the outer edge exploration task. Continuing to explore the outer edges is more efficient.
- the predetermined angular velocitygradually decreases. It can be understood that the cleaning robot travels at a predetermined angular velocity and a predetermined linear velocity, and the angular velocity gradually decreases. It is detected that the preset trajectory of the preset ground medium may be a spiral. The trajectory can enable the cleaning robot to explore a range that gradually expands in a spiral shape with the cleaning robot as the center, ensuring that the cleaning robot can explore the preset ground medium signal. When the angular speed remains unchanged, the preset trajectory is an arc trajectory. Other trajectories can also be designed according to the needs of the situation, and there are no restrictions here.
- FIG. 80is a schematic diagram of another scene in which a cleaning robot according to an embodiment of the present application performs outer edge exploration on a preset ground medium.
- position 20is the first contour point, and it encounters an obstacle for the first time at position 21.
- Objectat this time, control the cleaning robot to turn around in place and continue the outer edge exploration task along the left edge direction opposite to the right edge direction, or, after navigating to the first contour point, continue the outer edge edge along the left edge direction opposite to the right edge direction. Exploration tasks are not limited here.
- the cleaning robot 1encounters an obstacle for the second time at position 22, the edge exploration is completed.
- the obstacles encountered by the cleaning robot 1can be the same obstacle or different obstacles, and there is no restriction here.
- the methodfurther includes:
- the outline of the preset ground mediumis determined based on the outline point information.
- the contour of the preset ground mediumis determined by the obtained contour points of each preset ground medium. After the cleaning robot 1 obtains the contour points of the preset ground medium, it can fit multiple contour points to obtain the preset ground medium. Set the contour of the ground medium.
- the methodfurther includes:
- the cleaning robotis controlled to clean the preset ground surface according to the inner edge exploration mode.
- the mediumis explored along the edge to obtain the outline of the preset ground medium.
- the cleaning robot 1cannot explore an edge close to the room wall when it explores the preset ground medium in the outer edge exploration mode, then the cleaning robot 1 detects If there is too much missing contour point information, the contour of the preset ground medium may not be determined. At this time, combined with the inner edge exploration method, the integrity of the contour of the preset ground medium can be improved.
- FIGS. 81 to 83are schematic diagrams of scenes in which a cleaning robot according to an embodiment of the present application determines the outline of a preset ground medium by connecting or fitting processing or graphic matching processing on contour points.
- cleaning robot 1After cleaning robot 1 performs inner edge exploration of the media area range 2 in the inner edge exploration mode, it determines multiple contour points and connects each contour point to obtain the outline of the preset ground medium.
- the cleaning robot 1determines multiple contour points and performs fitting processing on each contour point, thereby obtaining the preset ground medium. Smoother contours.
- FIG. 83is a schematic diagram of a scene for performing graphic matching processing on the outline of a preset ground medium according to an embodiment of the present application.
- the preset ground mediumis usually a regular shape.
- the cleaning robot 1obtains the first shape after connecting various contour points, and calculates the matching degree between the minimum polygon surrounding the first shape and the first shape. , to determine the contour of the preset ground medium.
- the cleaning robot 1calculates that the matching degree between the smallest rectangle surrounding the first graphic and the first graphic is 98%, and calculates that the matching degree between the smallest trapezoid surrounding the first graphic and the first image is 60%, then Determine the minimum rectangle as the outline of the preset ground medium.
- the methodfurther includes:
- the first media areais determined according to the outline of the preset ground medium, and the second media area closest to the first media area is obtained from the pre-constructed cleaning area map, wherein the first media area is The ground media types corresponding to the second media areas are the same;
- the first media area and the second media areaare merged in the cleaning area map.
- the cleaning area mapis a map pre-constructed by the cleaning robot 1 and used to plan a movement path or a cleaning path.
- the first media areais determined according to the outline of the preset ground medium, it can be determined through the cleaning area map whether there is a medium area with the same ground medium type as the first media area. If there is a ground medium area with the same ground medium type as the first media area, media area, select the second media area that is closest to the first media area.
- the distance between the two media areascan be the shortest distance, the longest distance, etc. between the contour points of the two areas. This is not done here. limit.
- the preset ground medium typerepresents the type of ground medium. For example, if the type of ground medium in the first media area is carpet type, then the type of ground medium corresponding to the second media area is also carpet type.
- the cleaning robotcan better plan its travel trajectory or tasks in the future. For example, the first media area and the second media area that belong to the same preset ground medium are identified and merged respectively. Afterwards, the cleaning robot will be regarded as a complete media area. If the obstacles that separate the preset floor media are removed, the cleaning robot can complete the cleaning of the preset floor media through one cleaning plan, and the cleaning robot was originally The area occupied by obstacles will also be cleaned at the same time. There is no need to plan and clean the first media area and the second media area separately, and there will be no leakage of cleaning in the area originally occupied by obstacles.
- FIG. 84is a schematic diagram of a scene in which a cleaning robot merges adjacent media areas according to an embodiment of the present application.
- Ais the first media area determined by the cleaning robot 1 based on the outline of the preset ground medium
- Bis the second media area closest to the first media area A obtained from the cleaning area map.
- the preset separation distancecan be set to 20cm, 30cm or 40cm.
- the preset separation distancecan also be set to other distances according to the needs of the situation, which is not limited here.
- the methodfurther includes:
- the cleaning robotis controlled to clean the preset floor medium through the side scanning element and/or the middle scanning element in a first arcuate path;
- the cleaning robotis controlled to clean the preset floor medium in a second arcuate path through the side scanning part and/or the middle scanning part, wherein the second The arcuate path is orthogonal to the first arcuate path.
- the cleaning pathcan be determined according to the outline of the preset ground medium. As shown in FIG. 85 , while the cleaning robot 1 moves according to the first arcuate path and the second arcuate path, the preset floor medium is cleaned through the side scanning element 10 .
- the moving trajectory of the cleaning robot 1covers all areas of the preset ground medium, which can avoid Sweep and miss sweep.
- the cleaning robotwhen the cleaning robot detects the preset ground medium, the status information of the cleaning robot is obtained, and the edge exploration mode is determined based on the status information.
- the edge exploration modeincludes the inner edge exploration mode and the outer edge exploration mode; according to the edge exploration mode The mode explores the preset ground medium along the edge to obtain the outline of the preset ground medium.
- cleaning robots in related technologiesexplore the ground medium, they usually use a path that is a polygonal line or an arc line to explore the preset ground medium, that is, the cleaning robot is controlled to rotate to a predetermined direction and to go straight until the cleaning robot detects the target. signal, and then control the cleaning robot to rotate in another direction and control the cleaning robot away from the position where the target signal is detected, so as to repeatedly form a zigzag exploration path; or control the cleaning robot to proceed at a constant angular speed and linear speed until the cleaning robot detects the target signal.
- Figure 86shows the trajectories of using polyline, arc, and spiral trajectories to explore the preset ground medium.
- Embodiments of the present applicationprovide a ground medium exploration method, cleaning robot and storage medium. Among them, this method is applied to a cleaning robot, which can be a sweeper or other intelligent robot, and is not limited here.
- FIG. 87is a schematic flow chart of a ground medium exploration method provided by an embodiment of the present application.
- the ground medium exploration methodincludes steps S1 to S4.
- Step S1Determine the starting position, and the cleaning robot detects the target ground medium at the starting position;
- the cleaning robotuses sensors (such as ultrasonic sensors) to detect preset floor media (such as carpets, floor mats, etc. that require special treatment) and non-preset floor media during travel.
- the target mediumcan be a preset ground medium or a non-preset ground medium.
- the target mediumis the preset ground medium; when the inner edge exploration action is adopted, the target medium It is a non-default ground medium.
- the position of the cleaning robot when it first detects the preset ground mediumis used as the starting position. If the inner edge exploration action is used, the position of the cleaning robot when it detects the preset ground medium for the first time and then continues to explore and detects non-preset ground medium can be used as the starting position.
- Step S2control the cleaning robot to perform predetermined actions
- the cleaning robotWhen the cleaning robot performs steps S1 or S2, it also includes: obtaining the contour points of the preset ground medium, and using the first obtained contour points of the preset ground medium as the first contour point, and the first The contour point position is the coordinates of the cleaning robot when the cleaning robot obtains the first contour point.
- the coordinates of the cleaning robotcoincide with or are a predetermined distance away from the coordinates of the cleaning robot when the cleaning robot obtains the first contour point.
- the coordinates of the cleaning robotmay be determined by the coordinates of sensors detecting floor media.
- the contour point of the preset ground mediumis the coordinate of the cleaning robot when it detects the preset ground medium when the cleaning robot performs step S1 or S2.
- the cleaning robotafter the cleaning robot determines the starting position, it performs a predetermined action and completes the preparatory action for performing an edge exploration action.
- Different exploration actionscorrespond to different predetermined actions.
- the cleaning robotmarks the contour point of the preset ground medium acquired for the first time as the first contour point during the execution of step S1. , and then perform the predetermined action in step S2; when the cleaning robot takes the inner edge exploration action, since it is necessary to determine the preset ground medium edge and adjust the starting posture of the robot when starting the exploration action, the cleaning robot performs In the process of step S2, the contour point of the preset ground medium obtained for the first time during the execution of the predetermined action is marked as the first contour point.
- Step S3Control the cleaning robot to travel at a predetermined angular speed and a predetermined linear speed until the cleaning robot detects the target signal again, wherein the angular speed gradually decreases;
Landscapes
- Electric Vacuum Cleaner (AREA)
Abstract
Description
Translated fromChinese本申请涉及清洁技术领域,尤其涉及一种清洁机器人的控制方法、处理、生成、区域划分、探索方法、装置、系统及存储介质。The present application relates to the field of cleaning technology, and in particular to a control method, processing, generation, area division, exploration method, device, system and storage medium of a cleaning robot.
清洁机器人可用于对地面进行自动清洁,应用场景可以为家庭室内清洁、大型场所清洁等。在扫拖一体机器人领域,一般会提供基础的清洁模式,如执行全屋扫地,全屋拖地等模式;但对于用户而言,单一的清洁模式较难满足用户需求,为了最大程度的保证清洁效果,用户经常需要针对不同的房间手动设置以下至少一种:不同的清洁模式、各个待清洁房间的清洁参数、清洁频率等,以达到符合预期的清洁效果,此类清洁机器人仍不够智能。Cleaning robots can be used to automatically clean floors, and their application scenarios can include household indoor cleaning, large-scale place cleaning, etc. In the field of sweeping and mopping integrated robots, basic cleaning modes are generally provided, such as whole-house sweeping, whole-house mopping, etc. However, for users, a single cleaning mode is difficult to meet user needs. In order to ensure maximum cleaning As a result, users often need to manually set at least one of the following for different rooms: different cleaning modes, cleaning parameters of each room to be cleaned, cleaning frequency, etc., in order to achieve the expected cleaning effect. This type of cleaning robot is still not smart enough.
发明内容Contents of the invention
本申请提供了一种清洁机器人的控制方法、处理、生成、区域划分、探索方法、装置、系统及存储介质,旨在解决清洁机器人单一的清洁模式较难满足用户需求,不够智能等技术问题。This application provides a control method, processing, generation, area division, exploration method, device, system and storage medium for a cleaning robot, aiming to solve technical problems such as the single cleaning mode of the cleaning robot being difficult to meet user needs and not intelligent enough.
第一方面,本申请实施例提供了一种清洁机器人的控制方法,包括:In a first aspect, embodiments of the present application provide a control method for a cleaning robot, including:
获取清洁任务地图;Get a map of cleaning tasks;
判断所述清洁任务地图是否包括地毯区域,且当所述清洁任务地图包括地毯区域时,控制所述清洁机器人通过刷扫件对所述地毯区域的地毯进行清洁;Determine whether the cleaning task map includes a carpet area, and when the cleaning task map includes a carpet area, control the cleaning robot to clean the carpet in the carpet area through a brush;
控制所述清洁机器人至少通过拖擦件对所述清洁任务地图中的至少部分非地毯区域进行清洁。The cleaning robot is controlled to clean at least part of the non-carpet area in the cleaning task map through at least a mopping element.
第二方面,本申请实施例提供了一种清洁机器人的控制方法,包括:In a second aspect, embodiments of the present application provide a control method for a cleaning robot, including:
获取第一维护指令;Get the first maintenance instruction;
响应于所述第一维护指令,确定所述清洁机器人的任务执行状态;In response to the first maintenance instruction, determine the task execution status of the cleaning robot;
根据所述任务执行状态,控制所述清洁机器人进行维护。According to the task execution status, the cleaning robot is controlled to perform maintenance.
第三方面,本申请实施例提供了一种清洁机器人的控制方法,用于控制所述清洁机器人对预设清洁区域进行清洁,包括:In a third aspect, embodiments of the present application provide a method for controlling a cleaning robot, which is used to control the cleaning robot to clean a preset cleaning area, including:
获取边界补漏清洁任务的一个或至少两个预设频率;Obtain one or at least two preset frequencies for the boundary leak cleaning task;
根据所述预设频率,控制所述清洁机器人对所述预设清洁区域执行边界补漏清洁任务。According to the preset frequency, the cleaning robot is controlled to perform a boundary leak-filling cleaning task on the preset cleaning area.
第四方面,本申请实施例提供了一种清洁机器人的控制装置,所述控制装置包括存储器和处理器;In a fourth aspect, embodiments of the present application provide a control device for a cleaning robot, where the control device includes a memory and a processor;
其中,所述存储器用于存储计算机程序;Wherein, the memory is used to store computer programs;
所述处理器,用于执行所述计算机程序并在执行所述计算机程序时,实现:The processor is configured to execute the computer program and when executing the computer program, implement:
前述的清洁机器人的控制方法的步骤。The steps of the aforementioned cleaning robot control method.
第五方面,本申请实施例提供了一种清洁系统,包括:In a fifth aspect, embodiments of the present application provide a cleaning system, including:
清洁机器人,所述清洁机器人包括行走单元、拖擦件以及刷扫件,所述行走单元用于驱动所述清洁机器人运动,所述拖擦件以及所述刷扫件用于对地面进行清洁;Cleaning robot, the cleaning robot includes a walking unit, a mopping part and a brushing part, the walking unit is used to drive the cleaning robot to move, the mopping part and the brushing part are used to clean the ground;
基站,所述基站至少用于对清洁机器人的拖擦件进行清洁;以及A base station, which is used at least for cleaning the mopping parts of the cleaning robot; and
前述的控制装置。The aforementioned control device.
第六方面,本申请实施例提供了一种清洁设备清洁图像的处理方法,用于在清洁设备执行清洁任务,通过清洁件对一个或至少两个预设清洁区域完成清洁之后,生成清洁图像,包括:In a sixth aspect, embodiments of the present application provide a method for processing a cleaning image of a cleaning device, which is used to generate a cleaning image after the cleaning device performs a cleaning task and completes cleaning of one or at least two preset cleaning areas with a cleaning piece, include:
在清洁设备通过清洁件对一预设清洁区域进行一次清洁之后,获取所述预设清洁区域对应的脏污程度;After the cleaning equipment cleans a preset cleaning area once through the cleaning piece, obtain the degree of dirt corresponding to the preset cleaning area;
根据一个或至少两个预设清洁区域对应的脏污程度,生成清洁图像。A cleaning image is generated based on the degree of dirtiness corresponding to one or at least two preset cleaning areas.
第七方面,本申请实施例提供了一种清洁设备清洁图像的处理装置,所述处理装置包括存储器和处理器;In a seventh aspect, embodiments of the present application provide a processing device for cleaning images of a cleaning device, where the processing device includes a memory and a processor;
其中,所述存储器用于存储计算机程序;Wherein, the memory is used to store computer programs;
所述处理器,用于执行所述计算机程序并在执行所述计算机程序时,实现前述的清洁设备清洁图像的处理方法的步骤。The processor is configured to execute the computer program and, when executing the computer program, implement the steps of the aforementioned method for processing an image cleaned by a cleaning device.
第八方面,本申请实施例提供了一种清洁设备系统,包括:In an eighth aspect, embodiments of the present application provide a cleaning equipment system, including:
清洁设备,所述清洁设备包括运动机构和清洁件,所述运动机构用于驱动所述清洁设备运动,以使所述清洁件对预设清洁区域进行清洁;Cleaning equipment, the cleaning equipment includes a movement mechanism and a cleaning piece, the movement mechanism is used to drive the cleaning equipment to move, so that the cleaning piece cleans the preset cleaning area;
基站,所述基站至少用于对所述清洁设备的清洁件进行清洁;以及,A base station, the base station is at least used to clean the cleaning parts of the cleaning equipment; and,
前述的处理装置。The aforementioned processing device.
第九方面,本申请实施例提供了一种清洁设备系统,包括:In a ninth aspect, embodiments of the present application provide a cleaning equipment system, including:
清洁设备,所述清洁设备包括运动机构、清洁件和维护机构,所述运动机构用于驱动所述清洁设备运动,以使所述清洁件对预设清洁区域进行清洁,所述维护机构用于对所述清洁件进行清洁;以及,Cleaning equipment, the cleaning equipment includes a movement mechanism, cleaning parts and a maintenance mechanism. The movement mechanism is used to drive the cleaning equipment to move so that the cleaning parts clean the preset cleaning area. The maintenance mechanism is used to Clean the cleaning parts; and,
前述的处理装置。The aforementioned processing device.
第十方面,本申请实施例提供了一种可视化界面的生成方法,包括:In a tenth aspect, embodiments of the present application provide a method for generating a visual interface, including:
获取清洁设备的全部或部分已完成的执行事项;Obtain all or part of the completed execution items for cleaning equipment;
根据所述获取的清洁设备的全部或部分已完成的执行事项,生成可视化界面,所述可视化界面用于通过动画指示所述清洁设备的全部或部分已完成的执行事项。A visual interface is generated based on the acquired execution items of all or part of the cleaning equipment, and the visual interface is used to indicate all or part of the execution items of the cleaning equipment through animation.
第十一方面,本申请实施例提供了一种可视化界面的生成装置,所述处理装置包括存储器和处理器;In an eleventh aspect, embodiments of the present application provide a device for generating a visual interface, where the processing device includes a memory and a processor;
其中,所述存储器用于存储计算机程序;Wherein, the memory is used to store computer programs;
所述处理器,用于执行所述计算机程序并在执行所述计算机程序时,实现前述的可视化界面的生成方法的步骤。The processor is configured to execute the computer program and implement the steps of the aforementioned visual interface generation method when executing the computer program.
第十二方面,本申请实施例提供了一种清洁设备系统,包括:In a twelfth aspect, embodiments of the present application provide a cleaning equipment system, including:
清洁设备,所述清洁设备包括运动机构和执行机构,所述运动机构用于驱动所述清洁设备运动,以使所述执行机构进行清洁;以及,Cleaning equipment, the cleaning equipment includes a movement mechanism and an actuator, the movement mechanism is used to drive the cleaning equipment to move, so that the actuator performs cleaning; and,
前述的生成装置。The aforementioned generating device.
第十三方面,本申请实施例提供了一种清洁机器人的清洁区域划分方法,包括:In a thirteenth aspect, embodiments of the present application provide a cleaning area division method for a cleaning robot, including:
获取房间的图形学特征,所述图形学特征包括所述房间的边界;Obtain graphical features of the room, where the graphical features include the boundaries of the room;
获取工作量值域范围;Get the workload value range;
根据所述工作量值域范围和所述图形学特征,确定所述房间的分割线,以使所述分割线和所述房间的边界形成至少两个预设清洁区域,各所述预设清洁区域的工作量的量值均小于或等于所述工作量值域范围的上限值,且大于或等于所述工作量值域范围中的下限值;或者According to the workload value range and the graphical characteristics, the dividing line of the room is determined so that the dividing line and the boundary of the room form at least two preset cleaning areas, each of the preset cleaning areas The magnitude of the workload in the region is less than or equal to the upper limit of the workload value range, and greater than or equal to the lower limit of the workload value range; or
仅有一个所述预设清洁区域的工作量的量值小于所述下限值,且工作量的量值小于所述下限值的所述预设清洁区域的清洁顺序在其他所述预设清洁区域之后。The magnitude of the work load of only one of the preset cleaning areas is less than the lower limit value, and the cleaning sequence of the preset cleaning area whose magnitude value is less than the lower limit value is in the other preset cleaning areas. After cleaning the area.
第十四方面,本申请实施例提供了一种清洁机器人的控制方法,包括:In a fourteenth aspect, embodiments of the present application provide a control method for a cleaning robot, including:
根据前述的清洁区域划分方法,确定房间中形成的预设清洁区域;According to the aforementioned cleaning area division method, determine the preset cleaning area formed in the room;
控制所述清洁机器人根据所述预设清洁区域对所述房间进行清洁。The cleaning robot is controlled to clean the room according to the preset cleaning area.
第十五方面,本申请实施例提供了一种清洁机器人的控制装置,所述控制装置包括存储器和处理器;In a fifteenth aspect, embodiments of the present application provide a control device for a cleaning robot, where the control device includes a memory and a processor;
其中,所述存储器用于存储计算机程序;Wherein, the memory is used to store computer programs;
所述处理器,用于执行所述计算机程序并在执行所述计算机程序时,实现前述方法的步骤。The processor is configured to execute the computer program and implement the steps of the foregoing method when executing the computer program.
第十六方面,本申请实施例提供了一种清洁系统,包括:In a sixteenth aspect, embodiments of the present application provide a cleaning system, including:
清洁机器人,所述清洁机器人包括运动机构和清洁件,所述运动机构用于驱动所述清洁机器人运动,以使所述清洁件对地面进行清洁;Cleaning robot, the cleaning robot includes a movement mechanism and cleaning parts, the movement mechanism is used to drive the cleaning robot to move, so that the cleaning parts clean the floor;
基站,所述基站至少用于对清洁机器人进行维护;以及a base station for at least maintaining the cleaning robot; and
前述的控制装置。The aforementioned control device.
第十七方面,本申请提供一种地面介质探索方法,包括:In the seventeenth aspect, this application provides a ground medium exploration method, including:
当所述清洁机器人检测到预设地面介质时,获取所述清洁机器人的状态信息,并根据所述状态信息确定沿边探索模式,其中,所述沿边探索模式包括内沿边探索模式以及外沿边探索模式;When the cleaning robot detects the preset ground medium, the cleaning robot obtains the status information of the cleaning robot, and determines the edge exploration mode according to the status information, wherein the edge exploration mode includes an inner edge exploration mode and an outer edge exploration mode. ;
根据所述沿边探索模式对所述预设地面介质进行沿边探索,以获取所述预设地面介质的轮廓。The preset ground medium is edge-explored according to the edge-edge exploration mode to obtain the outline of the preset ground medium.
第十八方面,本申请还提供一种清洁机器人,所述清洁机器人包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的计算机程序,其中所述计算机程序被所述处理器执行时,实现如上所述的地面介质探索方法的步骤。In an eighteenth aspect, the present application also provides a cleaning robot. The cleaning robot includes a processor, a memory, and a computer program stored on the memory and executable by the processor, wherein the computer program is When the processor is executed, the steps of the above ground medium exploration method are implemented.
第十九方面,本申请实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时使所述处理器实现上述的方法的步骤。In a nineteenth aspect, embodiments of the present application provide a computer-readable storage medium. The computer-readable storage medium stores a computer program. When the computer program is executed by a processor, the processor causes the processor to implement the above method. step.
本申请实施例提供了一种清洁机器人的控制方法、处理、生成、区域划分、探索方法、装置、系统及存储介质,方法包括:获取清洁任务地图;判断所述清洁任务地图是否包括地毯区域,且当所述清洁任务地图包括地毯区域时,控制所述清洁机器人通过刷扫件对所述地毯区域的地毯进行清洁;控制所述清洁机器人至少通过拖擦件对所述清洁任务地图中的至少部分非地毯区域进行清洁;通过根据清洁任务地图中的地毯区域,自动对地毯进行刷扫,以及对非地毯的区域至少进行拖擦,而不需要用户对不同的区域设置不同的清洁方式,提高了清洁机器人清洁的智能性。Embodiments of the present application provide a control method, processing, generation, area division, exploration method, device, system and storage medium for a cleaning robot. The method includes: obtaining a cleaning task map; determining whether the cleaning task map includes a carpet area, And when the cleaning task map includes a carpet area, the cleaning robot is controlled to clean the carpet in the carpet area through a brushing component; the cleaning robot is controlled to clean at least one of the carpets in the cleaning task map through a mopping component. Clean some non-carpet areas; by automatically brushing the carpet according to the carpet area in the cleaning task map, and at least mopping the non-carpet areas, it does not require the user to set different cleaning methods for different areas, improving Improves the intelligence of cleaning robots.
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请实施例的公开内容。It should be understood that the above general description and the following detailed description are only exemplary and explanatory, and do not limit the disclosure of the embodiments of the present application.
为了更清楚地说明本申请实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。In order to explain the technical solutions of the embodiments of the present application more clearly, the drawings needed to be used in the description of the embodiments will be briefly introduced below. Obviously, the drawings in the following description are some embodiments of the present application. For those of ordinary skill in the art, other drawings can also be obtained based on these drawings without exerting creative efforts.
图1是本申请实施例提供的一种清洁机器人的控制方法的流程示意图;Figure 1 is a schematic flowchart of a control method for a cleaning robot provided by an embodiment of the present application;
图2是一实施方式中清洁系统的示意图;Figure 2 is a schematic diagram of a cleaning system in an embodiment;
图3是一实施方式中清洁机器人的示意性框图;Figure 3 is a schematic block diagram of a cleaning robot in an embodiment;
图4是一实施方式中清洁机器人的结构示意图;Figure 4 is a schematic structural diagram of a cleaning robot in one embodiment;
图5是一实施方式中基站的结构示意图;Figure 5 is a schematic structural diagram of a base station in an embodiment;
图6是一实施方式中基站的示意性框图;Figure 6 is a schematic block diagram of a base station in an embodiment;
图7为本申请实施例提供的一种内沿边探索的场景示意图;Figure 7 is a schematic diagram of an inner edge exploration scenario provided by an embodiment of the present application;
图8为本申请实施例提供的一种外沿边探索的场景示意图;Figure 8 is a schematic diagram of an outer edge exploration scenario provided by an embodiment of the present application;
图9是本申请实施例提供的一种清洁机器人的控制方法的流程示意图;Figure 9 is a schematic flowchart of a control method for a cleaning robot provided by an embodiment of the present application;
图10是一实施方式中单位区域的工作量的示意图;Figure 10 is a schematic diagram of workload per unit area in an embodiment;
图11是一实施方式中控制方法的流程示意图;Figure 11 is a schematic flow chart of a control method in an embodiment;
图12是本申请实施例提供的一种清洁机器人的控制方法的流程示意图;Figure 12 is a schematic flowchart of a control method for a cleaning robot provided by an embodiment of the present application;
图13是一实施方式中清洁机器人的结构示意图;Figure 13 is a schematic structural diagram of a cleaning robot in one embodiment;
图14是一实施方式中进行沿边清洁运动时的清洁盲区的示意图;Figure 14 is a schematic diagram of the cleaning blind area during edge cleaning movement in one embodiment;
图15和图16是一些实施方式中清洁机器人执行边界补漏清洁任务的示意图;Figures 15 and 16 are schematic diagrams of a cleaning robot performing a boundary leak-filling cleaning task in some embodiments;
图17是一实施方式中狭窄区域的示意图;Figure 17 is a schematic diagram of a narrow area in an embodiment;
图18至图20是另一些实施方式中清洁机器人执行边界补漏清洁任务的示意图;Figures 18 to 20 are schematic diagrams of cleaning robots performing boundary leak repair cleaning tasks in other embodiments;
图21和图22是一些实施方式中沿柱状体清洁时的清洁盲区的示意图;Figures 21 and 22 are schematic diagrams of the cleaning blind area when cleaning along the columnar body in some embodiments;
图23是一实施方式中沿柱状体清洁对应的边界补漏清洁策略的示意图;Figure 23 is a schematic diagram of the boundary leakage cleaning strategy corresponding to cleaning along the columnar body in one embodiment;
图24是本申请实施例提供的一种清洁机器人的控制装置的示意性框图;Figure 24 is a schematic block diagram of a control device of a cleaning robot provided by an embodiment of the present application;
图25是本申请实施例提供的一种清洁设备清洁图像的处理方法的流程示意图;Figure 25 is a schematic flowchart of a method for processing images cleaned by a cleaning device according to an embodiment of the present application;
图26是本申请实施例提供的一种清洁设备系统的示意性框图;Figure 26 is a schematic block diagram of a cleaning equipment system provided by an embodiment of the present application;
图27是本申请另一实施例提供的一种清洁设备系统的示意性框图;Figure 27 is a schematic block diagram of a cleaning equipment system provided by another embodiment of the present application;
图28是一实施方式中拖擦件脏污程度的变化示意图;Figure 28 is a schematic diagram of changes in the degree of dirtiness of the mopping parts in one embodiment;
图29是本申请实施例提供的预设清洁区域与图像区域的示意图;Figure 29 is a schematic diagram of the preset cleaning area and image area provided by the embodiment of the present application;
图30是一实施方式中清洁图像的示意图;Figure 30 is a schematic diagram of a cleaning image in an embodiment;
图31是一实施方式涉及的一清洁图像的示意图;Figure 31 is a schematic diagram of a cleaning image according to an embodiment;
图32是一实施方式涉及的又一清洁图像的示意图;Figure 32 is a schematic diagram of another cleaning image according to an embodiment;
图33是一实施方式涉及的还一清洁图像的示意图;Figure 33 is a schematic diagram of another cleaning image according to an embodiment;
图34是一实施方式中清洁图像的示意图;Figure 34 is a schematic diagram of a cleaning image in an embodiment;
图35是一实施方式涉及的一清洁图像的示意图;Figure 35 is a schematic diagram of a cleaning image according to an embodiment;
图36是一实施方式涉及的又一清洁图像的示意图;Figure 36 is a schematic diagram of another cleaning image according to an embodiment;
图37是一实施方式涉及的还一清洁图像的示意图;Figure 37 is a schematic diagram of another cleaning image according to an embodiment;
图38是一实施方式中清洁图像的示意图;Figure 38 is a schematic diagram of a cleaning image in an embodiment;
图39是一实施方式中清洁图像的示意图;Figure 39 is a schematic diagram of a cleaning image in an embodiment;
图40是一实施方式涉及的一清洁图像的示意图;Figure 40 is a schematic diagram of a cleaning image according to an embodiment;
图41是一实施方式涉及的又一清洁图像的示意图;Figure 41 is a schematic diagram of another cleaning image according to an embodiment;
图42是一实施方式涉及的还一清洁图像的示意图;Figure 42 is a schematic diagram of another cleaning image according to an embodiment;
图43是一实施方式中清洁图像的示意图;Figure 43 is a schematic diagram of a cleaning image in an embodiment;
图44是一实施方式中清洁图像的示意图;Figure 44 is a schematic diagram of a cleaning image in an embodiment;
图45是一实施方式涉及的一清洁图像的示意图;Figure 45 is a schematic diagram of a cleaning image according to an embodiment;
图46是本申请实施例提供的房间与房间区域的示意图;Figure 46 is a schematic diagram of a room and a room area provided by an embodiment of the present application;
图47是一实施方式中房间清洁图像的示意图;Figure 47 is a schematic diagram of a room cleaning image in one embodiment;
图48是一实施方式中轨迹清洁图像的示意图;Figure 48 is a schematic diagram of a track cleaning image in an embodiment;
图49是一实施方式中轨迹清洁图像的示意图;Figure 49 is a schematic diagram of a track cleaning image in an embodiment;
图50是本申请一实施方式涉及的清洁图像;Figure 50 is a cleaning image related to an embodiment of the present application;
图51是本申请实施例提供的一种清洁设备清洁图像的处理装置的示意性框图。Figure 51 is a schematic block diagram of a cleaning image processing device provided by a cleaning device according to an embodiment of the present application.
图52是本申请实施例提供的一种可视化界面的生成方法的流程示意图;Figure 52 is a schematic flowchart of a method for generating a visual interface provided by an embodiment of the present application;
图53是一实施方式中可视化界面的示意图;Figure 53 is a schematic diagram of a visual interface in an embodiment;
图54是一实施方式中可视化界面的示意图;Figure 54 is a schematic diagram of a visual interface in an embodiment;
图55是一实施方式中可视化界面的示意图;Figure 55 is a schematic diagram of a visual interface in an embodiment;
图56是一实施方式中可视化界面的示意图;Figure 56 is a schematic diagram of a visual interface in an embodiment;
图57是一实施方式中可视化界面的示意图;Figure 57 is a schematic diagram of a visual interface in an embodiment;
图58是一实施方式中可视化界面的示意图;Figure 58 is a schematic diagram of a visual interface in an embodiment;
图59是一实施方式中可视化界面的示意图;Figure 59 is a schematic diagram of a visual interface in an embodiment;
图60是本申请另一实施例提供的一种可视化界面的生成方法的流程示意图;Figure 60 is a schematic flowchart of a method for generating a visual interface provided by another embodiment of the present application;
图61是一实施方式中弹窗的示意图;Figure 61 is a schematic diagram of a pop-up window in an embodiment;
图62是一实施方式中弹窗的示意图;Figure 62 is a schematic diagram of a pop-up window in an embodiment;
图63是一实施方式中涉及的第一执行事项对应的图片的示意图;Figure 63 is a schematic diagram of a picture corresponding to the first execution item involved in an embodiment;
图64是一实施方式中保存标识的示意图;Figure 64 is a schematic diagram of saving identification in an embodiment;
图65是本申请实施例提供的一种可视化界面的生成装置的示意性框图;Figure 65 is a schematic block diagram of a visual interface generation device provided by an embodiment of the present application;
图66是本申请实施例提供的一种清洁设备系统的示意性框图。Figure 66 is a schematic block diagram of a cleaning equipment system provided by an embodiment of the present application.
图67是本申请实施例提供的一种清洁机器人的清洁区域划分方法的流程示意图;Figure 67 is a schematic flowchart of a cleaning area division method for a cleaning robot provided by an embodiment of the present application;
图68是一实施方式中清洁任务地图中房间的示意图;Figure 68 is a schematic diagram of a room in the cleaning task map in one embodiment;
图69是一实施方式中单位区域的工作量的示意图;Figure 69 is a schematic diagram of the workload per unit area in an embodiment;
图70是一实施方式中不同划分方案的示意图;Figure 70 is a schematic diagram of different partitioning schemes in an embodiment;
图71是一实施方式中障碍物稠密区域的示意图;Figure 71 is a schematic diagram of an obstacle-dense area in an embodiment;
图72是未聚合障碍物稠密区域时清洁机器人的运动轨迹示意图;Figure 72 is a schematic diagram of the movement trajectory of the cleaning robot when there is no dense obstacle area;
图73是聚合障碍物稠密区域时清洁机器人的运动轨迹示意图;Figure 73 is a schematic diagram of the movement trajectory of the cleaning robot when aggregating areas with dense obstacles;
图74是本申请实施例提供的一种拖擦件的清洁方法的流程示意图;Figure 74 is a schematic flowchart of a cleaning method for mopping parts provided by an embodiment of the present application;
图75是本申请实施例提供的一种地面介质探索方法的步骤流程示意图;Figure 75 is a schematic flow chart of the steps of a ground medium exploration method provided by an embodiment of the present application;
图76是本申请实施例提供的一种清洁机器人对预设地面介质执行内沿边探索执行第一预定动作的示意图;Figure 76 is a schematic diagram of a cleaning robot provided by an embodiment of the present application performing inner edge exploration and performing a first predetermined action on a preset ground medium;
图77是本申请实施例提供的一种清洁机器人对预设地面介质执行内沿边探索的场景示意图;Figure 77 is a schematic diagram of a scene in which a cleaning robot performs inner edge exploration on a preset ground medium according to an embodiment of the present application;
图78是本申请实施例提供的一种清洁机器人的结构示意图;Figure 78 is a schematic structural diagram of a cleaning robot provided by an embodiment of the present application;
图79是本申请实施例提供的一种清洁机器人对预设地面介质执行外沿边探索的场景示意图;Figure 79 is a schematic diagram of a scene in which a cleaning robot performs outer edge exploration on a preset ground medium according to an embodiment of the present application;
图80是本申请实施例提供的一种清洁机器人对预设地面介质执行外沿边探索的又一场景示意图;Figure 80 is a schematic diagram of another scene in which a cleaning robot according to an embodiment of the present application performs outer edge exploration on a preset ground medium;
图81是本申请实施例提供的一种清洁机器人通过对轮廓点进行连接确定预设地面介质的轮廓的场景示意图;Figure 81 is a schematic diagram of a scene in which a cleaning robot determines the contour of a preset ground medium by connecting contour points according to an embodiment of the present application;
图82是本申请实施例提供的一种对预设地面介质的轮廓进行拟合处理的场景示意图;Figure 82 is a schematic diagram of a scene for fitting the contour of a preset ground medium provided by an embodiment of the present application;
图83是本申请实施例提供的一种清洁机器人通过对轮廓点进行图形匹配处理确定预设地面介质的轮廓的场景示意图;Figure 83 is a schematic diagram of a scene in which a cleaning robot according to an embodiment of the present application determines the outline of a preset ground medium by performing graphic matching processing on outline points;
图84是本申请实施例提供的一种清洁机器人合并相邻介质区域的场景示意图;Figure 84 is a schematic diagram of a scene in which a cleaning robot merges adjacent media areas provided by an embodiment of the present application;
图85是本申请实施例提供的一种清洁机器人清扫预设地面介质的轨迹示意图;Figure 85 is a schematic diagram of the trajectory of a cleaning robot cleaning preset ground media provided by an embodiment of the present application;
图86是本申请实施例提供的一种清洁机器人采用不同轨迹探索预设地面介质的示意图;Figure 86 is a schematic diagram of a cleaning robot using different trajectories to explore preset ground media provided by an embodiment of the present application;
图87是本申请实施例提供的一种地面介质探索方法的步骤流程示意图;Figure 87 is a schematic flow chart of the steps of a ground medium exploration method provided by an embodiment of the present application;
图88是本申请实施例提供的一种清洁机器人的结构示意性框图。Figure 88 is a schematic structural block diagram of a cleaning robot provided by an embodiment of the present application.
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。The technical solutions in the embodiments of the present application will be clearly and completely described below with reference to the accompanying drawings in the embodiments of the present application. Obviously, the described embodiments are part of the embodiments of the present application, rather than all of the embodiments. Based on the embodiments in this application, all other embodiments obtained by those of ordinary skill in the art without creative efforts fall within the scope of protection of this application.
附图中所示的流程图仅是示例说明,不是必须包括所有的内容和操作/步骤,也不是必须按所描述的顺序执行。例如,有的操作/步骤还可以分解、组合或部分合并,因此实际执行的顺序有可能根据实际情况改变。The flowcharts shown in the accompanying drawings are only examples and do not necessarily include all contents and operations/steps, nor are they necessarily performed in the order described. For example, some operations/steps can also be decomposed, combined or partially merged, so the actual order of execution may change according to actual conditions.
下面结合附图,对本申请的一些实施方式作详细说明。在不冲突的情况下,下述的实施例及实施例中的特征可以相互组合。Some embodiments of the present application will be described in detail below with reference to the accompanying drawings. The following embodiments and features in the embodiments may be combined with each other without conflict.
请参阅图1,图1是本申请实施例提供的一种清洁机器人的控制方法的流程示意图。所述清洁机器人的控制方法可以应用在清洁系统中,用于对系统中的清洁机器人进行控制,以使清洁机器人执行清洁任务,对清洁任务地图对应的区域进行清洁等过程。Please refer to FIG. 1 , which is a schematic flowchart of a control method for a cleaning robot provided by an embodiment of the present application. The control method of the cleaning robot can be applied in a cleaning system to control the cleaning robot in the system so that the cleaning robot performs cleaning tasks and cleans the area corresponding to the cleaning task map.
清洁任务地图对应的区域可以为家庭空间、家庭空间的一个房间单元、一个房间单元的部分区域、大型场所或者大型场所的部分区域等任一个待清洁的区域。从另一角度看,清洁任务地图对应的区域可以指首次清洁的较大区域,例如整个房间单元;也可以指对较大区域进行首次清洁后需要进行补漏扫的区域,例如房间单元内的靠墙区域,或者障碍物区域。The area corresponding to the cleaning task map can be any area to be cleaned such as a family space, a room unit of a family space, a partial area of a room unit, a large place, or a part of a large place. From another perspective, the area corresponding to the cleaning task map can refer to the larger area that is cleaned for the first time, such as the entire room unit; it can also refer to the area that needs to be cleaned after the first cleaning of the larger area, such as the backrest in the room unit. Wall area, or obstacle area.
可选地,清洁任务地图可以是响应于建图指令,对当前所在空间进行探索建立的,或者,可以是根据清洁机器人在清洁过程中识别的障碍物、地毯等更新的;可选地,清洁任务地图可以是用户指定的清洁区域的地图,例如响应于用户在地图上选定的清洁区域例如一个或多个房间,确定该一个或多个房间为清洁任务地图,或者,响应于用户在地图上圈出的清洁区域例如一个或多个房间的部分区域,确定该一个或多个房间的部分区域为清洁任务地图,当然也不限于此。Optionally, the cleaning task map can be established by exploring the current space in response to mapping instructions, or it can be updated based on obstacles, carpets, etc. identified by the cleaning robot during the cleaning process; optionally, the cleaning The task map may be a map of a cleaning area specified by the user. For example, in response to the user selecting a cleaning area such as one or more rooms on the map, determining the one or more rooms as a cleaning task map, or in response to the user selecting the cleaning area on the map. The cleaning area circled above is, for example, a partial area of one or more rooms. The partial area of one or more rooms is determined as a cleaning task map, and is certainly not limited to this.
如图2所示,清洁系统包括一个或多个清洁机器人100,以及一个或多个基站200。基站200用于和清洁机器人100配合使用,例如,基站200可以向清洁机器人100进行充电、基站200可以向清洁机器人100提供停靠位置等。基站200还可以对清洁机器人100的拖擦件110的进行清洁,其中,拖擦件110用于对地面进行拖擦。As shown in FIG. 2 , the cleaning system includes one or
清洁系统还包括控制装置300,控制装置300可以用于实现本申请实施例的清洁机器人的控制方法的步骤。可选地,清洁机器人100的机器人控制器104和/或基站200的基站控制器206可以单独或者配合作为控制装置300,用于实现本申请实施例的清洁机器人的控制方法的步骤;在另一些实施方式中,清洁系统包括单独的控制装置300,用于实现本申请实施例的清洁机器人的控制方法的步骤,该控制装置300可以设置在清洁机器人100上,或者可以设置在基站200上;当然也不限于此,例如控制装置300可以为除清洁机器人100和基站200之外的装置,如家庭智能终端、总控设备等。The cleaning system also includes a
清洁机器人100可用于对地面进行自动拖擦,清洁机器人100的应用场景可以为家庭室内清洁、大型场所清洁等。The cleaning
图3为一实施方式中清洁机器人100的示意性框图。清洁机器人100包括机器人主体、驱动电机102、传感器单元103、机器人控制器104、电池105、行走单元106、机器人存储器107、机器人通信单元108、机器人交互单元109、拖擦件110、和充电部件等。FIG. 3 is a schematic block diagram of the
拖擦件110用于对地面进行拖擦,拖擦件110的数量可以为一个或多个。拖擦件110例如为拖布。拖擦件110设置在机器人主体的底部,具体为机器人主体的底部靠后的位置。在机器人主体内部设有驱动电机102,在机器人主体的底部伸出两个转轴,拖擦件110套接在转轴上。驱动电机102可带动转轴旋转,从而转轴带动拖擦件110旋转。The mopping
在一些实施方式中,如图4所示,清洁机器人100还包括刷扫件120,刷扫件120包括边刷件121和/或中扫件122。清洁机器人100为扫拖一体的清洁机器人,刷扫件120和拖擦件110可以一起工作,例如刷扫件120和拖擦件110同时工作,刷扫件120和拖擦件110持续交替工作等;当然,该刷扫件120和拖擦件110也可以分开工作,即刷扫件120单独进行清扫工作,或者,拖擦件110单独进拖擦工作。In some embodiments, as shown in FIG. 4 , the cleaning
清洁机器人在使用刷扫件120针对地面进行扫地时,边刷件121在外侧将灰尘等脏污扫到中间区域,中扫件122又继续将中间区域的脏污清扫至吸尘装置。其中,边刷件121的 数目不做限定,如图4中清洁机器人100在左右两侧布局有两个边刷件121,可选的,仅在左侧或右侧布局一个边刷件121。When the cleaning robot uses the brushing
一般来说,可将刷扫件120设置于拖擦件110的前侧,从而,在刷扫件120和拖擦件110一起工作时,清洁机器人100可以进行前扫后拖,相比刷扫件120设置于拖擦件110的后面,可以避免刷扫件120被拖擦件110拖过的湿区域打湿,也避免染了脏污的刷扫件120弄脏前面的已拖地区域。Generally speaking, the brushing and
行走单元106为与清洁机器人100的移动相关的部件,用于驱动清洁机器人100运动,以使拖擦件110和/或刷扫件120对地面进行拖擦。The walking unit 106 is a component related to the movement of the
机器人控制器104设置在机器人主体内部,机器人控制器104用于控制清洁机器人100执行具体的操作。该机器人控制器104例如可以为中央处理器(Central Processing Unit,CPU)、或微处理器(Microprocessor)等。如图3所示,机器人控制器104与电池105、机器人存储器107、驱动电机102、行走单元106、传感器单元103、以及机器人交互单元109等部件电连接,以对这些部件进行控制。The
电池105设置在机器人主体内部,电池105用于为清洁机器人100提供电力。机器人主体上还设有充电部件,该充电部件用于从外部设备获取电力,从而向清洁机器人100的电池105进行充电。The
机器人存储器107设置在机器人主体上,机器人存储器107上存储有程序,该程序被机器人控制器104执行时实现相应的操作。机器人通信单元108设置在机器人主体上,机器人通信单元108用于让清洁机器人100和外部设备进行通信,清洁机器人100可以通过机器人通信单元108,与终端进行通信,和/或与基站200进行通信。其中,基站200为配合清洁机器人100使用的清洁设备。The robot memory 107 is provided on the robot body, and a program is stored in the robot memory 107. When the program is executed by the
在机器人主体上设置的传感器单元103包括各种类型的传感器,例如激光雷达、碰撞传感器、距离传感器、跌落传感器、计数器、和陀螺仪等。激光雷达设置在机器人主体的顶部,在工作时,可得到周围的环境信息,例如障碍物相对激光雷达的距离和角度等。此外,也可用摄像头替代激光雷达,通过对摄像头拍摄的图像中的障碍物进行分析,也可得到障碍物相对摄像头的距离、角度等。碰撞传感器包括碰撞壳体和触发传感器。当清洁机器人100通过碰撞壳体与障碍物碰撞时,碰撞壳体向清洁机器人100内部移动,且压缩弹性缓冲件。在碰撞壳体向清洁机器人100内部移动一定距离后,碰撞壳体与触发传感器接触,触发传感器被触发产生信号,该信号可发送到机器人主体内的机器人控制器104,以进行处理。在碰完障碍物后,清洁机器人100远离障碍物,在弹性缓冲件的作用下,碰撞壳体移回原位。可见,碰撞传感器可对障碍物进行检测,以及当碰撞到障碍物后,起到缓冲作用。距离传感器具体可以为红外探测传感器,可用于探测障碍物至距离传感器的距离。距离传感器设置在机器人主体的侧面,从而通过距离传感器可测出位于清洁机器人100侧面附近的障碍物至距离传感器的距离值。距离传感器也可以是超声波测距传感器、激光测距传感器或者深度传感器等。跌落传感器设置在机器人主体的底部边缘,当清洁机器人100移动到地面的边缘位置时,通过跌落传感器可探测出清洁机器人100有从高处跌落的风险,从而执行相应的防跌落反应,例如清洁机器人100停止移动、或往远离跌落位置的方向移动等。在机器人主体的内部还设有计数器和陀螺仪。计数器用于检测清洁机器人100移动的距离长度。陀螺仪用于检测清洁机器人100转动的角度,从而可确定出清洁机器人100的朝向。The
机器人交互单元109设置在机器人主体上,用户可通过机器人交互单元109和清洁机器人100进行交互。机器人交互单元109例如包括开关按钮、扬声器、麦克风、触控开关/屏幕等部件。用户可通过按压开关按钮或触控开关/屏幕,控制清洁机器人100启动工作或停止工作,还可以通过触控屏幕显示清洁机器人的工作状态信息。清洁机器人100可通过扬声器向用户播放提示音,通过麦克风获取用户的控制指令,或通过获取用户的语音对用户所在地点进行定位。The robot interaction unit 109 is provided on the robot body, and the user can interact with the cleaning
应该理解,本申请实施例描述的清洁机器人100只是一个具体示例,并不对本申请实施例的清洁机器人100构成具体限定,本申请实施例的清洁机器人100还可以为其它的具体实现方式。例如,在其它的实现方式中,清洁机器人可以比图1所示的清洁机器人100有更多或更少的部件。It should be understood that the cleaning
图5为本一实施方式中基站200的立体示意图,图6为一实施方式中基站200的示意性框图。基站200用于和清洁机器人100配合使用,例如,基站200可以向清洁机器人100进行充电、基站200可以向清洁机器人100提供停靠位置等。基站200还可以清洗清洁机器人100的拖擦件110。其中,拖擦件110用于对地面进行拖擦。FIG. 5 is a schematic three-dimensional diagram of the
如图5和图6所示,本申请实施例的基站200包括基站主体202、清洗槽203和水箱(图未示)。清洗槽203设置在基站主体202上,清洗槽203用于清洗清洁机器人的拖擦件110。设置在清洗槽203上的清洗肋2031可对拖擦件110进行刮擦清洁。As shown in Figures 5 and 6, the
在基站主体202上设有入槽口205,入槽口205通向清洗槽203。清洁机器人100可通过入槽口205驶入基站200,以使得清洁机器人100停靠在基站200上的预设停靠位置。水箱设置在基站主体202内,水箱具体包括清水箱和污水箱。清水箱用于存储清洁用水。在清洁机器人100停靠在基站200上,清洁机器人100的拖擦件110容置于清洗槽203上。清水箱向清洗槽203提供清洁用水,清洁用水用于清洗拖擦件110。然后,清洗拖擦件110后的脏污水被收集到污水箱中。可选的,在基站主体202上设有顶盖(图未示),用户通过打开顶盖,可从基站主体202中取出水箱。在另一些实施方式中,水箱能够连接进水管(如连接至自来水管)和排污管(如连接至排水管),此时水箱可以固定在基站主体202内;在其他一些实施方式中,基站200也可以不设置清水箱、污水箱中的一种或两种,例如可以由进水管直接向清洗槽203提供清洁用水,清洗拖擦件110后的脏污水也可以直接由排污管排出。The base station
在一些实施方式中,如图6所示,基站200还包括脏污检测装置210,脏污检测装置210用于对拖擦件110的拖擦件脏污程度进行检测。示例性的,脏污检测装置210包括以下至少一种:视觉传感器、污水检测传感器,举例而言,可以根据视觉传感器获取拖擦件110的图像或颜色信息,根据拖擦件110的图像或颜色信息确定拖擦件110的拖擦件脏污程度,例如拖擦件110表面的灰度越深,拖擦件脏污程度也越大。举例而言,污水检测传感器可以获取清洗拖擦件110得到的污水的检测信息,根据获取的检测信息可以确定拖擦件110的拖擦件脏污程度;可选的,污水检测传感器包括以下至少一种:可见光检测传感器、红外检测传感器、总溶解性固体物质检测传感器;举例而言,红外检测传感器采集污水的浊度信息,可见光检测传感器采集污水的色度信息,总溶解性固体物质检测传感器采集污水的水导电率信息;可以根据浊度信息、色度信息、水导电率信息中的一种或多种,确定拖擦件脏污程度;例如,污水的浊度越大,水导电率越大,拖擦件脏污程度也越大。In some embodiments, as shown in FIG. 6 , the
参阅图6,基站200还可以包括基站控制器206、基站通信单元207、基站存储器208、水泵209和基站交互单元220等。Referring to Figure 6, the
基站控制器206设置在基站主体202内部,基站控制器206用于控制基站200执行具体的操作。基站控制器206例如可以为中央处理器(Central Processing Unit,CPU)、或微处理器(Microprocessor)等。其中,基站控制器206与基站通信单元207、基站存储器208、水泵209和基站交互单元220电连接。The base station controller 206 is provided inside the base station
基站存储器208设置在基站主体202上,基站存储器208上存储有程序,该程序被基站控制器206执行时实现相应的操作。基站存储器208还用于存储供基站200使用的参数。其中,基站存储器208包括但不限于磁盘存储器、CD-ROM、光学存储器等。The base station memory 208 is provided on the base station
水泵209设置在基站主体202内部,举例来说,水泵209有两个,一个水泵209用于控制清水箱向清洗槽203提供清洁用水,另一个水泵209用于将清洗拖擦件110后的脏污水收集到污水箱中。当然也不限于此,例如由进水管直接向清洗槽203提供清洁用水,可以通过控制进水管上的电磁阀向清洗槽203提供清洁用水。The water pump 209 is provided inside the
基站通信单元207设置在基站主体202上,基站通信单元207用于和外部设备进行通信,例如连接WI-FI路由器从而与终端进行通信,或者与清洁机器人100进行通信。The base station communication unit 207 is provided on the
基站交互单元220用于和用户进行交互。基站交互单元220例如包括显示屏和控制按钮,显示屏和控制按钮设置在基站主体202上,显示屏用于向用户展示信息,控制按钮用于供用户进行按压操作,以控制基站200的开机或停机等。The base
基站主体202上还设有供电部件,而清洁机器人上设有充电部件,当清洁机器人100停靠在基站200上的预设停靠位置后,清洁机器人100的充电部件和基站200的供电部件接触,从而基站200向清洁机器人100进行充电。其中,基站200的电能可来源于市电。The
示例性的,清洁机器人100对房间的地面进行清洁,当清洁机器人100上的电池105的电量少于预设电量阈值时,清洁机器人100自动驶向基站200。清洁机器人100通过基站200上的入槽口205进入基站200,并停靠在基站200上的预设停靠位置。此时,清洁机器人100上的充电部件和基站200上的供电部件电连接,基站200从市电获取电力,并通过供电部件和充电部件向清洁机器人100的电池105进行充电。清洁机器人100按需完成充电后,驶离基站200,继续对房间地面进行清洁。For example, the cleaning
示例性的,清洁机器人100可用于对地面进行拖擦。清洁机器人100对房间地面拖擦一段时间,拖擦件110变脏污后,清洁机器人100驶向基站200。清洁机器人100通过基站200上的入槽口205进入基站200,并停靠在基站200上的预设停靠位置。此时,清洁机器人100的拖擦件110容置在清洗槽203上,在水泵209的作用下,基站200内的清水箱的清洁用水流向清洗槽203,通过清洗槽203上的进液结构润湿拖擦件110上,同时拖擦件110与清洁槽内的凸起的清洗肋2031刮擦,从而实现对拖擦件110的清洁。清洗拖擦件110后的脏污水从清洁槽上的排液结构流出清洗槽203,在水泵209的作用下,脏污水收集到污水箱。For example, the cleaning
应该理解,前述的基站200只是一个具体示例,并不对本申请实施例的基站构成具体限定,本申请实施例的基站还可以为其它的具体实现方式,例如,本申请实施例的基站可以不包括水箱,基站主体可以连接自来水管和排水管,从而使用自来水管的自来水清洗清洁机器人100的拖擦件110,清洗拖擦件110后的脏污水由清洗槽203通过排水管流出基站200。或者,在其它的实现方式中,基站可以比图5所示的基站200有更多或更少的部件。It should be understood that the
如图1所示,本申请一实施例的清洁机器人的控制方法包括步骤S110至步骤S130。As shown in FIG. 1 , the control method of a cleaning robot according to an embodiment of the present application includes steps S110 to S130.
S110、获取清洁任务地图。S110. Obtain the cleaning task map.
清洁任务地图用于表示待清洁区域或待清洁区域内的待清洁子区域,待清洁子区域为待清洁区域内的未清洁区域。待清洁区域可以为家庭空间、家庭空间的一个房间单元、一个房间单元的部分区域、大型场所或者大型场所的部分区域等任一个待清洁的区域。待清洁子区域可以为清洁机器人在待清洁区域内进行沿边清洁后的区域。The cleaning task map is used to represent the area to be cleaned or the sub-area to be cleaned within the area to be cleaned, and the sub-area to be cleaned is the uncleaned area within the area to be cleaned. The area to be cleaned can be any area to be cleaned such as a family space, a room unit of a family space, a part of a room unit, a large place or a part of a large place. The sub-area to be cleaned may be an area after the cleaning robot performs edge cleaning in the area to be cleaned.
可选的,可以获取预先存储的清洁任务地图,例如在清洁机器人、基站、用户终端或者服务器预先存储清洁任务地图;或者可以在清洁机器人对待清洁区域进行探测后得到清洁任务地图,例如通过激光雷达、视觉传感器、惯性测量单元和碰撞传感器中的一种或多种传感器对待清洁区域进行探测;或者可以在对待清洁区域进行清洁时得到清洁任务地图,例如对待清洁区域进行沿边清洁,得到清洁任务地图,例如对该待清洁区域的边缘进行清洁,根据边缘部分的清洁轨迹,得到清洁任务地图,其中,当该待清洁区域为家庭空间,且该家庭空间包括多个房间单元时,清洁机器人对该待清洁空间中的每个房间单元的边缘进行清洁;或者可以从用户终端获取用户通过终端输入的地图。需要说明的是,可以通过上述方式中的任一种或多种方式获取清洁任务地图,例如可以通过任一种方式对获取的清洁任务地图进行整合矫正。Optionally, a pre-stored cleaning task map can be obtained, for example, the cleaning task map is pre-stored in the cleaning robot, base station, user terminal or server; or the cleaning task map can be obtained after the cleaning robot detects the area to be cleaned, for example, through lidar One or more sensors among the visual sensor, the inertial measurement unit and the collision sensor detect the area to be cleaned; or the cleaning task map can be obtained when the area to be cleaned is cleaned, for example, the cleaning task map is obtained by cleaning the area to be cleaned along the edge. , for example, clean the edge of the area to be cleaned, and obtain a cleaning task map based on the cleaning trajectory of the edge part. When the area to be cleaned is a home space, and the home space includes multiple room units, the cleaning robot will The edge of each room unit in the space to be cleaned is cleaned; or the map input by the user through the terminal can be obtained from the user terminal. It should be noted that the cleaning task map can be obtained through any one or more of the above methods. For example, the acquired cleaning task map can be integrated and corrected through any method.
示例性的,清洁机器人正常完成若干次(至少一次)房间清洁任务,在此期间清洁机器人可以完成地图的创建,还可以完成房间的划分和处理,还可以获取各个房间的地板材质 信息,例如用户可通过APP设置各个房间的材质信息。For example, the cleaning robot normally completes several (at least once) room cleaning tasks. During this period, the cleaning robot can complete the creation of the map, divide and process the rooms, and obtain the floor material information of each room, such as the user The material information of each room can be set through the APP.
示例性的,在清洁机器人完成全屋房间清洁时,可以在清洁过程中补全当前地图的信息,如当前地毯的数量的和区域,可以将地毯对应的地毯区域标记在地图上。For example, when the cleaning robot completes the cleaning of the whole house, it can complete the information of the current map during the cleaning process, such as the number and area of the current carpet, and the carpet area corresponding to the carpet can be marked on the map.
在一些实施方式中,可以执行地图数据分析的步骤。举例而言,基于清洁任务地图划分的待清洁区域可以称为预设清洁区域。举例而言,一个房间可以为一个预设清洁区域,或者一个房间有多个预设清洁区域;当然也不限于此,例如一个预设清洁区域包括一个房间以及另一个房间的至少部分区域。可选的,预设清洁区域可以根据用户在清洁任务地图上的操作来划分确定,或者根据预设的区域划分规则进行划分确定。In some implementations, steps of map data analysis may be performed. For example, the area to be cleaned based on the cleaning task map may be called a preset cleaning area. For example, a room may be a preset cleaning area, or a room may have multiple preset cleaning areas; of course, it is not limited thereto. For example, a preset cleaning area includes one room and at least part of another room. Optionally, the preset cleaning area can be divided and determined based on the user's operation on the cleaning task map, or based on preset area dividing rules.
示例性的,根据上次的清洁结果分析当前所有房间的图形学特征,如长、宽和面积,房间中地毯的数量和面积,障碍物的占地面积大小及分布情况,根据房间的图形学特征进行区域的合并、拆分与排序,划定待清洁区域,或者可以称为预设清洁区域。For example, based on the last cleaning result, the graphical characteristics of all current rooms are analyzed, such as length, width and area, the number and area of carpets in the room, the size and distribution of obstacles, and based on the graphical characteristics of the room. Features merge, split and sort areas to delineate areas to be cleaned, or can be called preset cleaning areas.
示例性的,可以根据历史清洁任务的清洁结果分析哪个房间/区域较脏,根据分析结果进行后续清洁任务的编排,当然也不限于此,例如可以根据用户设置的地图数据,指定特殊区域的易脏度,如可为厨房,餐厅,玄关指定较高易脏度,便于后续任务编排。For example, you can analyze which room/area is dirty based on the cleaning results of historical cleaning tasks, and arrange subsequent cleaning tasks based on the analysis results. Of course, it is not limited to this. For example, you can specify the convenience of special areas based on the map data set by the user. Dirty degree, for example, you can specify a higher dirty degree for the kitchen, dining room, and entrance, which facilitates the arrangement of subsequent tasks.
举例而言,例如可以对较脏的房间或区域执行复拖行为;又如:可以先清洁较干净的房间,后清洁较脏的房间,防止已经弄脏的拖布拖了干净的地面;或者也可以先清洁较脏的房间,再清洁较干净的房间,可以让房间看起来快速变干净,比如有朋友或客人到访,清洁时间比较紧急,可以让机器人先清洁肉眼可见比较脏的房间,让房间看起来快速变干净了。For example, you can perform a repeat mopping action on a dirty room or area; another example: you can clean a cleaner room first, and then clean a dirty room to prevent the dirty mop from mopping the clean floor; or you can also You can clean the dirty rooms first, and then clean the cleaner rooms, which can make the room look cleaner quickly. For example, if friends or guests are visiting and the cleaning time is urgent, you can let the robot clean the rooms that are visible to the naked eye first, so that the robot can clean the dirty rooms first. The room looked cleaner quickly.
在一些实施方式中,可以进行历史清洁参数的统计分析。例如统计近期房间清洁的时间记录,以便根据清洁的频率调整清洁参数,包括但不限于拖擦件的对地压力、湿度、清洁液的种类和用量等;或者也可以统计近期房间清洁的清洁参数设置,预估当前的房间脏污程度,便于后续进行清洁参数的动态调整。In some embodiments, statistical analysis of historical cleaning parameters may be performed. For example, the time records of recent room cleaning can be counted to adjust the cleaning parameters according to the frequency of cleaning, including but not limited to the ground pressure of the mopping parts, humidity, type and amount of cleaning fluid, etc.; or the cleaning parameters of recent room cleaning can also be counted. settings to estimate the current degree of room dirtiness to facilitate subsequent dynamic adjustment of cleaning parameters.
在一些实施方式中,可以根据用户操作启动托管模式,例如用户可以通过基站、清洁机器人、用户终端、智能音箱等的人机交互单元触发启动托管模式,包括但不限于按键、语音等方式的触发。In some implementations, the hosting mode can be started based on user operations. For example, the user can trigger the hosting mode through a human-computer interaction unit such as a base station, cleaning robot, user terminal, smart speaker, etc., including but not limited to triggering by key presses, voice, etc. .
示例性的,在启动托管模式时,可以通过人机交互单元告知用户。For example, when initiating the hosting mode, the user may be notified through the human-computer interaction unit.
示例性的,可以在用户需要扫拖同时以及地毯清洁时,启动托管模式。For example, the hosting mode can be started when the user needs sweeping and mopping and carpet cleaning.
在一些实施方式中,根据用户操作启动托管模式也可以称为用户一键管理清洁模式,在托管模式中,清洁机器人至少可以自动通过刷扫件对所述地毯区域的地毯进行清洁,以及通过拖擦件对所述清洁任务地图中的至少部分非地毯区域进行清洁;而不需要人为基于房间的情况重复设置清洁模式。举例而言,通过获取用户日常清洁习惯,给出当下清洁机器人应该执行的最好的清洁策略,以达到较好的清洁效果、达到较高的清洁效率、或者可以兼顾清洁效率和清洁效果;用户操作更少,机器人的清洁调度逻辑更符合用户期望,整体清洁效果更好。In some embodiments, initiating the hosting mode based on user operations may also be referred to as the user's one-click management cleaning mode. In the hosting mode, the cleaning robot can at least automatically clean the carpet in the carpet area by brushing and sweeping, and by mopping. The wiper cleans at least part of the non-carpet areas in the cleaning task map; there is no need to repeatedly set the cleaning mode based on room conditions. For example, by obtaining the user's daily cleaning habits, the best cleaning strategy that the current cleaning robot should implement is given to achieve better cleaning effects, higher cleaning efficiency, or to balance cleaning efficiency and cleaning effects; users With fewer operations, the robot's cleaning scheduling logic is more in line with user expectations, and the overall cleaning effect is better.
可选地,在托管模式中,清洁机器人可以自主确定地毯清洁的决策(包括是否清洁地毯,何时清洁等)及其执行策略;清洁机器人可以确定扫拖同时期间基于历史清洁数据的清洁机器人控制策略,进行残渣补扫的策略;清洁机器人可以确定路径规划策略,可以确定脏污复拖区域选择策略,如防止污染的路径选择策略及其脏污复拖顺序处理,例如基于实时脏污地图的区域选择,基于房间设置信息的区域选择,基于历史清洁频次的复拖区域选择;清洁机器人还可以在完成脏污复拖后进行清洁报告的处理。Optionally, in the managed mode, the cleaning robot can autonomously determine carpet cleaning decisions (including whether to clean the carpet, when to clean, etc.) and its execution strategy; the cleaning robot can determine the cleaning robot control based on historical cleaning data during sweeping and mopping. Strategy, a strategy for residue re-sweeping; the cleaning robot can determine the path planning strategy and the soil re-mopping area selection strategy, such as the path selection strategy to prevent pollution and the sequential processing of soil re-mopping, such as based on real-time soil map Area selection, area selection based on room setting information, and re-mopping area selection based on historical cleaning frequency; the cleaning robot can also process cleaning reports after completing dirty re-mopping.
举例而言,清洁机器人可以根据待清洁区域有没有地毯,判断要不要先进行一次地毯清洁;可以根据距离上一次沿边补漏的时间长短,判断本次清洁要不要进行沿边补漏,可以按时间计算该不该进行沿边补漏;可以确定地面较脏的区域,根据拖擦清洁时有没有脏污,判断要不要单独去补拖一次地;可以根据清扫的轨迹,判断拖擦件、边刷件、中扫件等执行机构哪些该动哪些不该动,可以更好的控制执行机构;可以根据房间的材质或者地面材质是 什么,判断拖地湿度和对地压力,以便更好更安全的完成清洁任务。For example, the cleaning robot can judge whether to perform a carpet cleaning first based on whether there is a carpet in the area to be cleaned; it can judge whether to perform edge leak repair in this cleaning based on the length of time since the last edge leak repair, and can calculate the time based on the time. You should not repair leaks along the edges; you can identify the dirty areas on the floor, and judge whether you need to mop the floor separately based on whether there is dirt during mopping and cleaning; you can judge the mopping parts, side brush parts, and middle parts based on the cleaning trajectory. You can better control the actuators such as scanning parts and which ones should move. You can judge the mopping humidity and floor pressure based on the material of the room or the material of the floor, so that you can complete the cleaning task better and safer. .
在一些实施方式中,在启动托管模式时,可以通过人机交互单元告知用户,清洁机器人将先执行地毯清洁任务,然后执行扫拖同时任务;或者也可以先执行扫拖同时任务,然后执行地毯清洁任务。In some implementations, when the hosting mode is started, the user can be informed through the human-computer interaction unit that the cleaning robot will first perform a carpet cleaning task, and then perform a simultaneous sweeping and mopping task; or it can also perform a simultaneous sweeping and mopping task first, and then perform a carpet cleaning task. Cleaning tasks.
S120、判断所述清洁任务地图是否包括地毯区域,且当所述清洁任务地图包括地毯区域时,控制所述清洁机器人通过刷扫件对所述地毯区域的地毯进行清洁。S120. Determine whether the cleaning task map includes a carpet area, and when the cleaning task map includes a carpet area, control the cleaning robot to clean the carpet in the carpet area through a brush.
需要说明的是,所述地毯区域不限于包括地毯的区域,例如还可以包括地垫、凉席等的区域或者其它不适合或用户设置的不允许进行湿拖的区域。在一些实施方式中,所述地毯区域可以称为地毯区域,地毯包括地毯、脚垫、儿童爬爬垫以及铺设在地面上的凉席等,当然,地毯还可以为其他清洁机器人遇到时需要进行特殊处理的铺设在地面上的介质,在此不做限制。为便于说明,本申请实施例主要以地毯区域为铺设地毯/地垫的区域。It should be noted that the carpet area is not limited to areas including carpets. For example, it may also include areas such as floor mats, mats, or other areas that are not suitable or set by the user and do not allow wet mopping. In some embodiments, the carpet area may be called a carpet area, and the carpet includes carpets, foot mats, children's climbing mats, and mats laid on the ground. Of course, the carpet may also be used for other cleaning robots that need to be cleaned when they encounter it. Specially processed media laid on the ground are not restricted here. For ease of explanation, in the embodiment of the present application, the carpet area is mainly used as the area where carpets/floor mats are laid.
通过控制所述清洁机器人通过刷扫件对所述地毯区域的地毯/地垫进行清洁,可以防止拖擦件润湿地毯,以及湿润的地毯沾染脏污和滋生细菌。通过自动判断清洁任务地图是否包括地毯区域,以及在清洁任务地图包括地毯区域时仅通过刷扫件对所述地毯区域的地毯进行清洁,清洁机器人的智能化程度更高,用户不需要单独针对地毯区域设置清洁机器人的工作模式。By controlling the cleaning robot to clean the carpet/floor mat in the carpet area through the brushing member, it is possible to prevent the mopping member from wetting the carpet and the wet carpet from being contaminated with dirt and breeding bacteria. By automatically determining whether the cleaning task map includes a carpet area, and only cleaning the carpet in the carpet area by brushing when the cleaning task map includes a carpet area, the cleaning robot is more intelligent and the user does not need to focus on the carpet separately. Area sets the working mode of the cleaning robot.
在一些实施方式中,所述控制所述清洁机器人通过刷扫件对所述地毯区域的地毯进行清洁,包括:控制所述清洁机器人运动至所述地毯区域;以及在运动至所述地毯区域之后对所述地毯区域的地毯进行清洁。In some embodiments, controlling the cleaning robot to clean the carpet in the carpet area through a brushing element includes: controlling the cleaning robot to move to the carpet area; and after moving to the carpet area Clean the carpet in said carpeted area.
示例性的,所述控制所述清洁机器人运动至所述地毯区域,包括;控制所述拖擦件在所述清洁机器人到达所述地毯区域的边缘时位于抬起位置;控制所述清洁机器人运行行走单元,以使所述机器人在所述行走单元驱动下运动至所述地毯上方。在清洁机器人到达所述地毯区域的边缘时,控制所述拖擦件位于抬起位置,以使清洁机器人在拖擦件抬起的状态下运动至所述地毯上方,可以防止拖擦件润湿地毯。Exemplarily, controlling the cleaning robot to move to the carpet area includes: controlling the mopping member to be in a raised position when the cleaning robot reaches the edge of the carpet area; controlling the operation of the cleaning robot A walking unit, so that the robot can move above the carpet driven by the walking unit. When the cleaning robot reaches the edge of the carpet area, the mopping member is controlled to be in a raised position, so that the cleaning robot moves to the top of the carpet with the mopping member lifted, which can prevent the mopping member from getting wet. carpet.
举例而言,在清洁机器人通过传感器单元检测到地毯时,可以确定所述清洁机器人到达所述地毯区域的边缘;例如根据当前碰撞传感器和/或超声波传感器等传感器的检测数据包含预设的特征,可以确定所述清洁机器人到达所述地毯区域的边缘;所述预设的特征可以根据清洁机器人在地毯区域的边缘时碰撞传感器和/或超声波传感器等传感器的检测数据确定。例如根据视觉传感器检测到与地毯区域的边缘的距离小于或等于预定距离时,确定所述清洁机器人到达所述地毯区域的边缘。For example, when the cleaning robot detects the carpet through the sensor unit, it can be determined that the cleaning robot has reached the edge of the carpet area; for example, based on the current detection data of sensors such as collision sensors and/or ultrasonic sensors, including preset features, It can be determined that the cleaning robot reaches the edge of the carpet area; the preset characteristics can be determined based on detection data of sensors such as collision sensors and/or ultrasonic sensors when the cleaning robot is at the edge of the carpet area. For example, it is determined that the cleaning robot has reached the edge of the carpet area when the visual sensor detects that the distance to the edge of the carpet area is less than or equal to a predetermined distance.
举例而言,可以根据清洁机器人的当前位置以及所述清洁任务地图中地毯区域的边界,判断所述清洁机器人是否到达所述地毯区域的边缘。当然也不限于此,例如可以在根据所述清洁任务地图判断机器人接近地毯区域时,根据传感器单元的检测数据确定是否到达所述地毯区域的边缘。For example, whether the cleaning robot reaches the edge of the carpet area can be determined based on the current position of the cleaning robot and the boundary of the carpet area in the cleaning task map. Of course, it is not limited to this. For example, when it is determined based on the cleaning task map that the robot is approaching the carpet area, it can be determined based on the detection data of the sensor unit whether it has reached the edge of the carpet area.
示例性的,如图4所示,刷扫件120包括边刷件121,边刷件121包括一个或多束刷毛,边刷件121旋转时刷毛将灰尘等脏污从清洁机器人100的外侧扫到中间区域。如图4所示,边刷件121包括两束刷毛,两束刷毛之间的角度大于0度且小于180度,边刷件121旋转到预设角度时,边刷件121的刷毛均伸向清洁机器人100的内部,换而言之,边刷件121的刷毛伸向清洁机器人的100清洁机器人的内部。For example, as shown in FIG. 4 , the
可选的,所述控制所述清洁机器人运动至所述地毯区域,包括:控制所述边刷件在所述清洁机器人到达所述地毯区域的边缘时位于收起位置,以使所述边刷件的刷毛伸向所述清洁机器人的内部。在清洁机器人到达所述地毯区域的边缘时,控制所述边刷件位于收起位置,边刷件的刷毛伸向所述清洁机器人的内部,在清洁机器人向地毯上方运动时,刷毛均伸向清洁机器人的内部,而没有刷毛伸向地毯的方向,可以防止在向地毯上方运动时,刷毛与地毯的边缘抵接使刷毛变形分叉,以延长边刷件的使用寿命。Optionally, controlling the cleaning robot to move to the carpet area includes: controlling the side brush to be in a retracted position when the cleaning robot reaches the edge of the carpet area, so that the side brush The bristles of the piece extend into the interior of the cleaning robot. When the cleaning robot reaches the edge of the carpet area, the side brush is controlled to be in the retracted position, and the bristles of the side brush extend toward the inside of the cleaning robot. When the cleaning robot moves above the carpet, the bristles extend toward Cleaning the inside of the robot without the bristles extending toward the carpet can prevent the bristles from contacting the edge of the carpet when moving upwards, causing the bristles to deform and bifurcate, thereby extending the service life of the side brush.
可选的,所述控制所述清洁机器人运动至所述地毯区域,包括:控制所述边刷件在所述清洁机器人到达所述地毯区域的边缘时处于自由旋转状态。边刷件处于自由旋转状态,例如可以对边刷件的驱动电机断电或者将边刷件与边刷件的驱动电机解耦,边刷件可以跟随阻力自由旋转;清洁机器人在边刷件处于自由旋转状态,以及向地毯上方运动时,即使边刷件的刷毛伸向地毯的方向,在刷毛产生一定程度变形时可以自由旋转脱离与地毯的抵接,以及恢复原来的形状,可以防止在向地毯上方运动时,刷毛与地毯的边缘抵接使刷毛变形分叉,以延长边刷件的使用寿命。Optionally, controlling the cleaning robot to move to the carpet area includes: controlling the side brush to be in a free-rotating state when the cleaning robot reaches the edge of the carpet area. The side brush is in a free-rotating state. For example, the drive motor of the side brush can be cut off or the drive motor of the side brush can be decoupled. The side brush can rotate freely following the resistance; the cleaning robot can rotate freely when the side brush is in the state. In the free-rotating state and when moving above the carpet, even if the bristles of the side brush extend toward the carpet, when the bristles are deformed to a certain extent, they can freely rotate out of contact with the carpet and restore their original shape, which can prevent the brush from moving toward the carpet. When moving above the carpet, the bristles contact the edge of the carpet, causing the bristles to deform and bifurcate, thereby extending the service life of the side brush.
可选的,所述控制所述清洁机器人运动至所述地毯区域,包括:控制所述边刷件在所述清洁机器人到达所述地毯区域的边缘时位于抬起位置。清洁机器人在边刷件位于抬起位置时向地毯上方运动,可以防止边刷件的刷毛与地毯的边缘抵接使刷毛变形分叉,以延长边刷件的使用寿命。Optionally, controlling the cleaning robot to move to the carpet area includes: controlling the side brush to be in a raised position when the cleaning robot reaches the edge of the carpet area. The cleaning robot moves above the carpet when the side brush is in the raised position, which can prevent the bristles of the side brush from contacting the edge of the carpet and cause the bristles to deform and bifurcate, thereby extending the service life of the side brush.
可选的,在所述清洁机器人到达所述地毯区域的边缘时,控制清洁机器人停止运动,以及在控制拖擦件位于抬起位置,控制边刷件位于收起位置、处于自由旋转状态或处于抬起位置之后,控制清洁机器人向地毯上方运动;可以防止拖擦件、边刷件未切换到相应的状态时就上到了地毯上。Optionally, when the cleaning robot reaches the edge of the carpet area, the cleaning robot is controlled to stop moving, and the mopping member is controlled to be in a raised position, and the side brush member is controlled to be in a retracted position, in a freely rotating state, or in a state of free rotation. After lifting the position, control the cleaning robot to move above the carpet; this can prevent the mopping part and the side brush part from going up on the carpet without switching to the corresponding state.
在一些实施方式中,所述控制所述清洁机器人通过刷扫件对所述地毯区域的地毯进行清洁,包括:在所述清洁机器人到达所述地毯区域的边缘时,控制所述清洁机器人对所述地毯进行沿边探索,以获取所述地毯的轮廓;根据所述地毯的轮廓,控制所述清洁机器人通过所述刷扫件以第一弓形路径对所述地毯进行清洁;根据所述地毯的轮廓,控制所述清洁机器人通过所述刷扫件以第二弓形路径对所述地毯进行清洁,其中,所述第二弓形路径与所述第一弓形路径正交。In some embodiments, controlling the cleaning robot to clean the carpet in the carpet area through a brushing element includes: when the cleaning robot reaches the edge of the carpet area, controlling the cleaning robot to clean the carpet area. The carpet is explored along the edge to obtain the outline of the carpet; according to the outline of the carpet, the cleaning robot is controlled to clean the carpet through the brushing member in a first arcuate path; according to the outline of the carpet , controlling the cleaning robot to clean the carpet in a second arcuate path through the brushing member, wherein the second arcuate path is orthogonal to the first arcuate path.
在一些实施方式中,所述沿边探索为内沿边探索或外沿边探索。In some implementations, the edge-edge exploration is inner edge-edge exploration or outer edge-edge exploration.
可选的,所述控制所述清洁机器人对所述地毯进行沿边探索,包括:控制所述清洁机器人对所述地毯进行内沿边探索。即,采用内沿边探索模式对所述地毯进行沿边探索。Optionally, controlling the cleaning robot to explore the carpet along the edge includes: controlling the cleaning robot to explore the inside of the carpet along the edge. That is, the inner edge exploration mode is used to perform edge exploration on the carpet.
可选的,所述控制所述清洁机器人对所述地毯进行沿边探索,包括:控制所述清洁机器人对所述地毯进行外沿边探索。即,采用外沿边探索模式对所述地毯进行沿边探索。Optionally, controlling the cleaning robot to explore the carpet along the edge includes: controlling the cleaning robot to explore the outer edge of the carpet. That is, the outer edge exploration mode is used to perform edge exploration on the carpet.
在一些实施方式中,外沿边探索模式指清洁机器人在地毯外侧对地毯进行沿边探索,所述清洁机器人在外侧进行沿边探索的过程中,清洁机器人的几何中心的正投影不落入地毯的正投影,以此来控制外沿边探索过程中清洁机器人的活动范围以降低拖擦件打湿或弄脏地毯区域的程度;内沿边探索模式指清洁机器人在地毯内侧对地毯进行沿边探索,清洁机器人在内侧进行沿边探索的过程中,清洁机器人的几何中心的正投影形成的轨迹至少有一部分与地毯的正投影重合。In some embodiments, the outer edge exploration mode means that the cleaning robot performs edge exploration on the outside of the carpet. During the edge exploration by the cleaning robot on the outside, the orthographic projection of the geometric center of the cleaning robot does not fall into the orthographic projection of the carpet. , in order to control the activity range of the cleaning robot during the outer edge exploration process to reduce the extent to which the mopping part wets or stains the carpet area; the inner edge exploration mode means that the cleaning robot explores the carpet edge on the inside of the carpet, and the cleaning robot moves on the inside of the carpet. During edge exploration, the trajectory formed by the orthographic projection of the geometric center of the cleaning robot at least partially coincides with the orthographic projection of the carpet.
在一些实施方式中,清洁机器人处于外沿边探索模式,在地毯外侧进行沿边探索时,机器人的正投影与地毯的正投影的重合部分小于机器人的正投影的百分之五十,以此降低拖擦件打湿或弄脏地毯区域的程度;清洁机器人处于内沿边探索模式,在地毯内侧进行沿边探索时,清洁机器人的正投影与地毯的正投影的重合部分大于等于机器人的正投影的百分之五十。In some embodiments, the cleaning robot is in the outer edge exploration mode. When exploring the edge outside the carpet, the overlap between the robot's orthographic projection and the carpet's orthographic projection is less than 50% of the robot's orthographic projection, thereby reducing drag. The extent to which the wiper wets or soils the carpet area; the cleaning robot is in the inner edge exploration mode. When edge exploration is performed on the inside of the carpet, the overlap between the orthographic projection of the cleaning robot and the orthographic projection of the carpet is greater than or equal to the percentage of the orthographic projection of the robot. Fifty.
其中,与外沿边探索模式相比,清洁机器人采用内沿边探索模式对地毯进行探索后所确定的地毯的轮廓的完整性更高。例如,地毯周围放置有障碍物,清洁机器人采用外沿边探索模式对地毯进行探索时,障碍物可能会阻碍清洁机器人的探索行为,从而无法获得完整的地毯的轮廓。Among them, compared with the outer edge exploration mode, the integrity of the carpet contour determined by the cleaning robot after exploring the carpet using the inner edge exploration mode is higher. For example, if there are obstacles placed around the carpet, and the cleaning robot uses the outer edge exploration mode to explore the carpet, the obstacles may hinder the cleaning robot's exploration behavior, making it impossible to obtain the complete outline of the carpet.
另外,如果沿边探索模式为外沿边探索模式,清洁机器人在地毯的外沿边探索,可以降低拖擦件打湿或弄脏地毯的程度。例如,清洁机器人处于拖地模式,如果清洁机器人在检测到地毯时采用了内沿边探索模式,则会大面积打湿甚至污染地毯。In addition, if the edge exploration mode is the outer edge exploration mode, the cleaning robot explores the outer edge of the carpet, which can reduce the degree to which the mopping element wets or stains the carpet. For example, if the cleaning robot is in mopping mode, and if the cleaning robot adopts the inner edge exploration mode when detecting the carpet, it will wet a large area or even contaminate the carpet.
请参照图7,图7为本申请实施例提供的一种清洁机器人100对地毯2执行内沿边探索 模式探索的场景示意图。Please refer to FIG. 7 , which is a schematic diagram of a scene in which a
如图7所示,清洁机器人100到由非地毯区域进入地毯区域的过程中,当所述清洁机器人100第一次检测到所述地毯2时,控制清洁机器人100执行内沿边探索任务,以获取所述地毯2的轮廓点,直至清洁机器人100再次到达第一轮廓点20位置,第一轮廓点20位置为所述清洁机器人100获取到第一个所述轮廓点的位置。可以理解,清洁机器人100再次到达第一轮廓点位置时,说明清洁机器人回到了检测到第一轮廓点20的位置,对地毯的探索路径已经形成闭环,即清洁机器人已经完成对地毯的探索。可以理解,清洁机器人100再次到达第一轮廓点20位置,并不限定于清洁机器人100一定要回到与第一轮廓点20重合的位置,当清洁机器人100与第一轮廓点20的距离小于预设距离阀值时,也可判定清洁机器人100再次到达第一轮廓点20。在一些实施方式中,清洁机器人的坐标可以由检测地毯的传感器的坐标确定。As shown in Figure 7, when the cleaning
请参照图8,图8为本申请实施例提供的一种清洁机器人100对地毯2执行外沿边探索模式的场景示意图。Please refer to FIG. 8 , which is a schematic diagram of a scene in which a
清洁机器人100首次检测到地毯,记录清洁机器人100的当前位置为第一轮廓点20。如果地毯2区域的边缘上没有障碍物,则清洁机器人100绕着地毯区域的边沿移动可以回到第一轮廓点20,或,当清洁机器人100与第一轮廓点20的距离小于预设距离阀值时,探索任务执行完成。The cleaning
在一些实施方式中,在启动托管模式后,先判断所述清洁任务地图是否包括地毯区域,例如先判断当前需要清洁的房间是否有地毯;如果有地毯,可以跟据地毯与清洁机器人的距离由近到远的规则,控制清洁机器人对多个地毯进行清洁;如果没有地毯则不做地毯清洁。In some embodiments, after starting the hosting mode, it is first determined whether the cleaning task map includes a carpet area, for example, it is first determined whether the room that currently needs to be cleaned has a carpet; if there is a carpet, the distance between the carpet and the cleaning robot can be determined by The near-to-far rule controls the cleaning robot to clean multiple carpets; if there is no carpet, it will not clean the carpet.
示例性的,当在地毯区域未检测到地毯,如地毯被移走时,可以控制清洁机器人在所述地毯区域的预设范围(如1平方米)内检测地毯;当在所述预设范围检测到地毯时,可以控制所述清洁机器人对所述地毯进行沿边探索,以获取所述地毯的轮廓,以及根据所述地毯的轮廓对所述地毯进行清洁,还可以根据所述地毯的轮廓更新所述清洁任务地图中的地毯区域;当在所述预设范围未检测到地毯时,可以将所述地毯区域从所述清洁任务地图中移除。For example, when no carpet is detected in the carpet area, such as when the carpet is removed, the cleaning robot can be controlled to detect the carpet within a preset range of the carpet area (such as 1 square meter); when a carpet is detected in the preset range When arriving at the carpet, the cleaning robot can be controlled to explore the carpet along the edge to obtain the outline of the carpet, clean the carpet according to the outline of the carpet, and can also update the carpet according to the outline of the carpet. The carpet area in the cleaning task map; when no carpet is detected in the preset range, the carpet area can be removed from the cleaning task map.
示例性的,在向地毯区域运动的途中,清洁机器人检测到地毯,如新增加的地毯或者转移后的地毯,可以对检测到的地毯进行沿边探索,以获取所述地毯的轮廓,以及根据所述地毯的轮廓对所述地毯进行清洁,还可以根据所述地毯的轮廓更新所述清洁任务地图中的地毯区域。For example, on the way to the carpet area, the cleaning robot detects a carpet, such as a newly added carpet or a transferred carpet, and can explore the detected carpet along its edges to obtain the outline of the carpet, and according to the The carpet is cleaned according to the outline of the carpet, and the carpet area in the cleaning task map can also be updated according to the outline of the carpet.
在一些实施方式中,所述控制所述清洁机器人通过刷扫件对所述地毯区域的地毯进行清洁,包括:控制所述清洁机器人运行所述边刷件,以及运行行走单元,以在所述行走单元驱动下在所述地毯上运动。清洁机器人在地毯上进行清洁时,在所述行走单元驱动下在所述地毯上运动,例如以弓形路径在所述地毯上运动,同时运行所述边刷件,将地毯上的灰尘等脏污从清洁机器人的外侧扫到中间区域。In some embodiments, controlling the cleaning robot to clean the carpet in the carpet area through a brushing element includes: controlling the cleaning robot to operate the side brushing element and operating a walking unit to clean the carpet in the carpet area. The walking unit is driven to move on the carpet. When the cleaning robot is cleaning on the carpet, it moves on the carpet driven by the walking unit, for example, moves on the carpet in an arcuate path, and at the same time runs the side brush to remove dust and other dirt on the carpet. Sweep from the outside of the cleaning robot to the middle area.
在一些实施方式中,所述刷扫件包括中扫件,所述控制所述清洁机器人通过刷扫件对所述地毯区域的地毯进行清洁,包括:控制所述清洁机器人运行所述中扫件,以及运行行走单元,以在所述行走单元驱动下在所述地毯上运动。In some embodiments, the brushing and sweeping parts include a middle sweeping part, and controlling the cleaning robot to clean the carpet in the carpet area through the brushing and sweeping parts includes: controlling the cleaning robot to run the middle sweeping part. , and operate the walking unit to move on the carpet driven by the walking unit.
示例性的,在控制边刷件将地毯上的脏污从清洁机器人的外侧扫到中间区域时,可以控制中扫件将中间区域的脏污清扫至清洁机器人的吸尘装置或控制中扫件将中间区域的脏污扬起,以及控制吸尘装置通过负压收集这些脏污。For example, when the side brush is controlled to sweep the dirt on the carpet from the outside of the cleaning robot to the middle area, the middle sweep can be controlled to sweep the dirt in the middle area to the vacuum device of the cleaning robot or the middle sweep is controlled. The dirt in the middle area is raised, and the vacuum device is controlled to collect the dirt through negative pressure.
示例性的,清洁地毯时,将吸尘装置的风机转速调升至强劲档,如最大档,以提高对地毯的清洁效果。For example, when cleaning a carpet, the fan speed of the vacuum cleaner is increased to a strong level, such as the maximum level, to improve the cleaning effect on the carpet.
举例而言,清洁机器人在地毯上运动以对地毯进行清洁时的行驶速度,小于清洁机器人向地毯运动的行驶速度,以提高对地毯的清洁效果。For example, the driving speed of the cleaning robot when moving on the carpet to clean the carpet is smaller than the driving speed of the cleaning robot moving toward the carpet, so as to improve the cleaning effect on the carpet.
示例性的,当所述边刷件触发过电流保护,控制所述清洁机器人将所述边刷件切换至 自由转动状态。举例而言,边刷件的驱动电机按照预设转速转动,当在清扫地毯过程中边刷件因与地毯上的绒毛或毛发缠绕而被卡死时,边刷件的驱动电机的电流超过预设的电流阈值,触发过电流保护;通过将边刷件切换至自由转动状态,可以防止过电流对清洁机器人造成的不良影响,例如防止边刷件的刷毛因缠绕导致的形变。For example, when the side brush triggers overcurrent protection, the cleaning robot is controlled to switch the side brush to a free-rotating state. For example, the drive motor of the side brush rotates at a preset speed. When the side brush gets entangled with the fluff or hair on the carpet during carpet cleaning, the current of the drive motor of the side brush exceeds the preset speed. Set the current threshold to trigger over-current protection; by switching the side brush to a free-rotating state, you can prevent the adverse effects of overcurrent on the cleaning robot, such as preventing the deformation of the bristles of the side brush due to entanglement.
可选的,当所述中扫件或所述行走单元与地毯上的绒毛或毛发缠绕,或者因其他原因触发过电流保护时,可以控制所述中扫件或所述行走单元停止运行,在预设时长之后再启动运行。Optionally, when the middle sweeping piece or the walking unit is entangled with fluff or hair on the carpet, or when overcurrent protection is triggered for other reasons, the middle sweeping piece or the walking unit can be controlled to stop running. Start running after the preset time.
示例性的,当所述中扫件或所述行走单元触发过电流保护的次数超过第一次数阈值,或者所述行走单元打滑的次数超过第二次数阈值,控制所述清洁机器人执行以下至少一项操作:停止对所述地毯进行清洁、标记所述地毯区域为禁止区域、异常提示。举例而言,当中扫件或所述行走单元触发过电流保护的次数超过第一次数阈值,或者所述行走单元打滑的次数超过第二次数阈值时,可以确定清洁机器人不适于对该地毯进行清洁,如地毯的绒毛过长或者毛发较多;可以停止对所述地毯进行清洁以及标记所述地毯区域为禁止区域;当所述地毯区域被标记为禁止区域时,在之后的清洁任务中可以不对该地毯区域进行清洁;还可以进行异常提示,用户可以根据该异常提示检查地毯,还可以通过人工设置解除将所述地毯区域被标记为禁止区域,例如在清除掉地毯上的毛发后解除所述禁止区域的标记,以便清洁机器人对该地毯区域的地毯进行清洁。Exemplarily, when the number of times the scanned object or the walking unit triggers overcurrent protection exceeds the first threshold, or the number of times the walking unit slips exceeds the second threshold, the cleaning robot is controlled to perform at least the following: One operation: stop cleaning the carpet, mark the carpet area as a prohibited area, and provide an exception prompt. For example, when the number of times the overcurrent protection is triggered by the scanned object or the walking unit exceeds the first threshold, or the number of times the walking unit slips exceeds the second threshold, it can be determined that the cleaning robot is not suitable for cleaning the carpet. Cleaning, such as the pile of the carpet is too long or the hair is too much; you can stop cleaning the carpet and mark the carpet area as a prohibited area; when the carpet area is marked as a prohibited area, you can do it in subsequent cleaning tasks The carpet area will not be cleaned; an exception prompt can also be provided, and the user can check the carpet according to the exception prompt; the carpet area can also be marked as a prohibited area through manual settings, for example, after removing the hair on the carpet, all Mark the prohibited area so that the cleaning robot can clean the carpet in that carpet area.
S130、控制所述清洁机器人至少通过拖擦件对所述清洁任务地图中的至少部分非地毯区域进行清洁。S130. Control the cleaning robot to clean at least part of the non-carpet area in the cleaning task map through at least a mopping member.
需要说明的是,本申请实施例可以不限定步骤S120对地毯进行清洁的步骤,与步骤S130对非地毯区域进行清洁的步骤的顺序,例如可以先清洁地毯再清洁非地毯区域,也可以先清洁非地毯区域再清洁地毯,或者也可以在清洁若干地毯后,清洁非地毯区域,以及之后继续清洁另外若干地毯。It should be noted that the embodiment of the present application does not limit the order of the step of cleaning the carpet in step S120 and the step of cleaning the non-carpet area in step S130. For example, the carpet can be cleaned first and then the non-carpet area, or the non-carpet area can be cleaned first. The non-carpet area is then cleaned, or the non-carpet area can be cleaned after cleaning several carpets, and then the other carpets can be cleaned.
在一些实施方式中,在托管模式下,先清洁非地毯区域再清洁地毯。例如在用户一键触发托管模式启动后,先按照非地毯区域的清洁顺序对非地毯区域进行同时刷扫和托扫,即扫拖同时,期间在碰到地毯时可以通过在所述地毯的外侧对所述地毯进行沿边探索以确定地毯的轮廓,之后继续对非地毯区域进行清洁;在清洁完所有的非地毯区域之后,对拖擦件进行维护,如清洁拖擦件并甩干,之后按照地毯区域的清洁顺序对地毯进行清洁。在拖擦件甩干后对地毯进行清洁,防止润湿地毯。In some embodiments, in managed mode, non-carpet areas are cleaned before carpets. For example, after the user triggers the hosting mode to start with one click, the non-carpet areas are first brushed and swept at the same time according to the cleaning order of the non-carpet areas, that is, sweeping and mopping at the same time. During this period, when the carpet is encountered, the outside of the carpet can be Exploring the edges of the carpet to determine the outline of the carpet, and then continuing to clean the non-carpet areas; after cleaning all the non-carpet areas, perform maintenance on the mop parts, such as cleaning the mop parts and drying them, and then follow the instructions Carpet Area Cleaning Sequence Carpet Cleaning. Clean the carpet after the mop is dry to avoid wetting the carpet.
举例而言,当非地毯区域是清洁机器人需要打扫的大部分区域时,非地毯区域是主要区域,还是肉眼比较容易识别到脏污的区域,如果先清洁地毯,由于清洁地毯需要加大风机功率,耗电量比较大,受限于清洁机器人的续航能力,影响到非地毯区域的清洁;例如可能导致清洁地毯之后非地毯区域还没清洁完,甚至还没开始清洁非地毯区域,清洁机器人就需要充电维护,让用户感觉清洁机器人主要的工作还没完成就停止工作了,不太符合用户预期,用户体验感不好。For example, when the non-carpet area is the majority of the areas that the cleaning robot needs to clean, is the non-carpet area the main area or the area where the dirt is easier to identify with the naked eye? If the carpet is cleaned first, the fan power needs to be increased to clean the carpet. , consumes a lot of power, is limited by the battery life of the cleaning robot, and affects the cleaning of non-carpet areas; for example, it may cause the cleaning robot to stop cleaning the non-carpet areas before the carpet is cleaned, or even before cleaning the non-carpet areas. It requires charging and maintenance, which makes users feel that the cleaning robot has stopped working before the main work is completed. This does not meet user expectations and the user experience is not good.
在另一些实施例中,当清洁任务地图包括多个地毯时,先对所有的地毯进行清洁之后,再对所述非地毯区域进行清洁;相较于先清洁非地毯区域后对拖擦件维护后再清洁地毯,可以减少清洁过程中维护拖擦件的工作量,如烘干拖擦件。举例而言,在拖擦件处于干燥状态时对地毯进行清洁,防止润湿地毯。In other embodiments, when the cleaning task map includes multiple carpets, all the carpets are cleaned first, and then the non-carpet areas are cleaned; compared to cleaning the non-carpet areas first and then maintaining the mopping parts Cleaning the carpet later can reduce the workload of maintaining the mop parts during the cleaning process, such as drying the mop parts. For example, clean the carpet while the mop is dry to prevent wetting the carpet.
在一些实施方式中,可以在地毯清洁选项中设置关闭地毯清洁或者开启地毯清洁。如果设置为关闭地毯清洁,那么在执行清洁任务过程中,不允许清洁机器人上地毯;例如在清洁机器人到达地毯区域的边缘时,在地毯的外侧对地毯进行沿边探索,得到地毯的轮廓,之后对地毯之外的区域进行清洁。如果设置为开启地毯清洁,在对所述地毯区域的地毯进行清洁之后,可以在对所述清洁任务地图中的至少部分非地毯区域进行清洁时,执行地毯规避的动作,例如绕开所述地毯。In some embodiments, carpet cleaning can be turned off or carpet cleaning can be set in the carpet cleaning options. If it is set to turn off carpet cleaning, the cleaning robot is not allowed to go on the carpet during the cleaning task; for example, when the cleaning robot reaches the edge of the carpet area, it will explore the carpet along the outside of the carpet to obtain the outline of the carpet, and then Clean the area beyond the carpet. If it is set to turn on carpet cleaning, after cleaning the carpet in the carpet area, you can perform carpet avoidance actions, such as bypassing the carpet, when cleaning at least part of the non-carpet area in the cleaning task map. .
在一些实施方式中,所述控制所述清洁机器人至少通过拖擦件对所述清洁任务地图中的非地毯区域进行清洁,包括:对所述拖擦件进行润湿;控制所述清洁机器人运动至所述非地毯区域;控制所述清洁机器人通过所述刷扫件,以及所述拖擦件对所述非地毯区域进行清洁。In some embodiments, controlling the cleaning robot to clean non-carpet areas in the cleaning task map at least through mopping elements includes: wetting the mopping elements; controlling movement of the cleaning robot to the non-carpet area; control the cleaning robot to clean the non-carpet area through the brushing member and the mopping member.
示例性的,清洁完地毯之后,控制所述清洁机器人运动至基站,以及控制基站对拖擦件进行润湿,还可以对拖擦件进行清洁以润湿拖擦件;当然也不限于此,例如清洁机器人上设有水箱,可以将水箱中的水供给拖擦件以润湿拖擦件。Exemplarily, after cleaning the carpet, the cleaning robot is controlled to move to the base station, and the base station is controlled to wet the mopping member. The mopping member can also be cleaned to moisten the mopping member; of course, it is not limited to this. For example, the cleaning robot is provided with a water tank, and the water in the water tank can be supplied to the mopping member to moisten the mopping member.
拖擦件润湿后,通过刷扫件和拖擦件对非地毯区域进行清洁,即对非地毯区域同时进行刷扫和拖擦,即控制清洁机器人执行扫拖同时任务。通过对地毯进行刷扫,而对非地毯区域同时扫拖,相较于对全部的清洁任务地图的区域进行同时扫拖,可以更大程度的减少对地毯的污染,例如可以防止吸附有脏污的湿的拖擦件在地毯上清洁时对地毯的污染。After the mopping part is moistened, the non-carpet area is cleaned by the brushing part and the mopping part, that is, the non-carpet area is brushed and mopped at the same time, that is, the cleaning robot is controlled to perform simultaneous sweeping and mopping tasks. By brushing and sweeping the carpet and sweeping and mopping the non-carpet areas at the same time, compared to sweeping and mopping all areas of the cleaning task map at the same time, the contamination of the carpet can be reduced to a greater extent, for example, it can prevent the adsorption of dirt. The wet mop will contaminate the carpet when cleaning it.
在一些实施方式中,可以根据所述非地毯区域的地面材质,确定对所述非地毯区域进行清洁时的拖擦参数;根据所述拖擦参数,对所述拖擦件进行润湿或对所述拖擦件进行清洗时,调整所述拖擦件的湿度;和/或根据所述拖擦参数,在对所述非地毯区域进行清洁时,控制所述清洁机器人调整所述拖擦件的对地压力。In some embodiments, the mopping parameters when cleaning the non-carpet area can be determined according to the ground material of the non-carpet area; and the mopping member can be moistened or cleaned according to the mopping parameters. When the mopping member is being cleaned, the humidity of the mopping member is adjusted; and/or according to the mopping parameters, when the non-carpet area is cleaned, the cleaning robot is controlled to adjust the mopping member. of ground pressure.
举例而言,可以通过调整拖擦件相对于机器人主体放下的高度,调整所述拖擦件的对地压力。For example, the ground pressure of the mopping member can be adjusted by adjusting the height at which the mopping member is lowered relative to the robot body.
举例而言,对于瓷砖地面,对地压力为12牛(N),拖擦件的湿度为正常或者较湿;对木地板地面,对地压力为5牛(N),拖擦件的湿度为较干。对于未设置地面材质的地面或者除瓷砖地面、木地板地面之外的其他材质地面,对地压力为12牛,拖擦件的湿度为正常。For example, for ceramic tile floors, the ground pressure is 12 N (N), and the humidity of the mopping parts is normal or relatively wet; for wooden floors, the ground pressure is 5 N (N), and the humidity of the mopping parts is Drier. For floors without a floor material or floors made of other materials except tile floors and wooden floors, the ground pressure is 12 N, and the humidity of the mop parts is normal.
示例性的,清洁任务地图包括至少一个区域的地面材质信息,如木地板、瓷砖地板等。举例而言,可以通过地图管理界面获取用户输入的地面材质信息,如每个房间的地面材质;或者可以在清洁机器人对地面进行探索和绘制地图时,获取地面材质信息;例如通过视觉传感器拍摄地面图像,根据地面图像的特征识别地面材质。For example, the cleaning task map includes floor material information of at least one area, such as wooden floor, tile floor, etc. For example, the ground material information input by the user can be obtained through the map management interface, such as the ground material of each room; or the ground material information can be obtained when the cleaning robot explores and draws the map on the ground; for example, the ground can be photographed through a visual sensor Image, identify the ground material based on the characteristics of the ground image.
可选的,不同地面材质对应的拖擦参数可以预先设定,或者可以由用户设置;例如在用户点击某地面材质的区域时,显示该地面材质对应的拖擦参数,用户可以对显示的拖擦参数进行修改。Optionally, the dragging parameters corresponding to different ground materials can be preset, or can be set by the user; for example, when the user clicks on an area of a certain ground material, the dragging parameters corresponding to the ground material are displayed, and the user can adjust the displayed dragging parameters. Erase parameters to modify.
可选的,当根据地面材质确定的拖擦参数与清洁任务设置的拖擦参数相差较大时,可以以清洁任务设置的拖擦参数为准。Optionally, when the mopping parameters determined based on the ground material are significantly different from the mopping parameters set in the cleaning task, the mopping parameters set in the cleaning task can prevail.
在一些实施方式中,所述控制所述清洁机器人至少通过拖擦件对所述清洁任务地图中的非地毯区域进行清洁,还包括:当所述非地毯区域包括目标区域时,在所述拖擦件进行清洗之后,控制所述清洁机器人运动至所述目标区域,以及通过所述拖擦件对所述目标区域进行拖擦,所述目标区域为需要重复拖擦的区域。In some embodiments, controlling the cleaning robot to clean non-carpet areas in the cleaning task map at least through a mopping element further includes: when the non-carpet area includes a target area, when the mopping member After the wiping member is cleaned, the cleaning robot is controlled to move to the target area, and the target area is mopped by the mopping member. The target area is an area that needs to be repeatedly mopped.
举例而言,基站对拖擦件进行清洗或者清洁机器人自主对拖擦件进行清洗。For example, the base station cleans the mopping parts or the cleaning robot autonomously cleans the mopping parts.
在对地面进行扫拖清洁后,若地面还有至少部分区域,即目标区域还未清洁干净需要重复拖擦,可以通过所述拖擦件对所述目标区域进行拖擦;由于在扫拖清洁时已经清洁掉体积较大的脏污,此时可以仅对目标区域进行拖擦,降低能耗。After sweeping and mopping the floor, if there are at least some areas on the floor, that is, the target area has not been cleaned yet and needs to be mopped again, the target area can be mopped by the mopping member; Larger dirt has been cleaned by then. At this time, you can only mop the target area to reduce energy consumption.
在一些实施方式中,所述刷扫件包括中扫件,在控制所述清洁机器人运动至所述目标区域时,控制所述中扫件和所述拖擦件均位于抬起位置;防止清洁干净的拖擦件在经过未拖擦地面或者未拖擦干净的地面时被污染,和/或防止湿润的拖擦件上的水的损失而降低对目标区域的清洁效果。In some embodiments, the brushing element includes a middle sweeping element, and when the cleaning robot is controlled to move to the target area, both the middle sweeping element and the mopping element are controlled to be in a raised position; preventing cleaning Clean mopping elements become contaminated when passing over unmopped floors or floors that have not been mopped clean, and/or prevent the loss of water on wet mopping elements and reduce the cleaning effect on the target area.
示例性的,在控制所述清洁机器人运动至所述目标区域时,所述清洁机器人的运动轨迹与之前离开所述目标区域的运动轨迹相同,且通过所述拖擦件对所述运动轨迹进行拖擦。需要说明的是,所述相同,包括完全相同或者大致相同。举例而言,在清洁机器人在对目标区域重复拖擦之后离开所述目标区域,拖擦件上的脏污有机会对运动路径上已经拖擦干净的 地面造成污染;通过在清洁干净拖擦件后对所述运动路径的地面进行拖擦,可以保持已经拖擦干净的地面的清洁。Exemplarily, when controlling the cleaning robot to move to the target area, the movement trajectory of the cleaning robot is the same as the movement trajectory before leaving the target area, and the movement trajectory is modified by the dragging member. Drag and wipe. It should be noted that the same includes exactly the same or substantially the same. For example, after the cleaning robot leaves the target area after repeatedly mopping the target area, the dirt on the mopping member has the opportunity to cause contamination on the ground that has been mopped clean on the movement path; by cleaning the mopping member Then the ground along the movement path is mopped, so that the mopped ground can be kept clean.
在一些实施方式中,所述控制所述清洁机器人至少通过拖擦件对所述清洁任务地图中的非地毯区域进行清洁,包括:以弓形轨迹对所述非地毯区域进行清洁。可选的,在弓形轨迹清洁的时候,控制靠近已经拖过的区域的一侧的边刷件收起,以防止边刷件运动污染已经拖过的区域;以及控制远离已经拖过的区域的一侧的边刷件工作,以将未拖过区域的脏污扫到中间区域,中扫件又继续将中间区域的脏污清扫至吸尘装置。In some embodiments, controlling the cleaning robot to clean non-carpet areas in the cleaning task map at least through mopping elements includes: cleaning the non-carpet areas in an arcuate trajectory. Optionally, when cleaning the arcuate trajectory, control the retraction of the side brush on the side close to the area that has been mopped to prevent the movement of the side brush from contaminating the area that has been mopped; and control the side brush away from the area that has been mopped. The side brush on one side works to sweep the dirt from the unmoved area to the middle area, and the middle sweep continues to sweep the dirt from the middle area to the vacuum device.
举例而言,在房间中新增加地毯,或者地毯转移位置等场景下,在对所述非地毯区域进行清洁时可以检测到地毯,例如通过传感器单元检测到地毯。在新发现地毯时对地毯进行沿边探索,确定该地毯对应的地毯区域,以及将所述地毯区域更新到清洁任务地图中。可选的,在确定地毯区域后,可以立即控制所述清洁机器人通过刷扫件对所述地毯区域的地毯进行清洁;或者也可以在清洁完非地毯区域之后,控制所述清洁机器人通过刷扫件对所述地毯区域的地毯进行清洁,即可以优先清洁非地毯区域,保证用户的体验感。对所述地毯区域的地毯进行清洁的步骤可以参考前述步骤S120的说明,此处不做赘述。For example, in scenarios such as a new carpet being added to the room or the carpet being moved, the carpet may be detected when cleaning the non-carpet area, for example, through a sensor unit. When a new carpet is discovered, the carpet is explored along the edge, the carpet area corresponding to the carpet is determined, and the carpet area is updated into the cleaning task map. Optionally, after determining the carpet area, the cleaning robot can be controlled to clean the carpet in the carpet area by brushing immediately; or the cleaning robot can be controlled to clean the carpet in the carpet area by brushing after cleaning the non-carpet area. The component cleans the carpets in the carpet area, that is, non-carpet areas can be cleaned first, ensuring a user-friendly experience. For the step of cleaning the carpet in the carpet area, reference can be made to the description of the aforementioned step S120 and will not be described again here.
在一些实施方式中,所述控制方法还包括:控制所述清洁机器人在满足第一预设条件时抬起所述拖擦件;控制所述清洁机器人在满足第二预设条件时抬起所述刷扫件;在控制所述清洁机器人抬起所述刷扫件和/或所述拖擦件之后,控制所述清洁机器人对所述刷扫件和/或所述拖擦件抬起时的位置进行清洁。在抬起刷扫件和/或拖擦件时,刷扫件和/或拖擦件上的脏污有机会掉落到地面,通过对刷扫件和/或拖擦件抬起时的位置进行清洁可以降低或消除对该位置的污染。In some embodiments, the control method further includes: controlling the cleaning robot to lift the mopping member when a first preset condition is met; controlling the cleaning robot to lift the mopping member when a second preset condition is met. The brushing and sweeping parts; after controlling the cleaning robot to lift the brushing and sweeping parts and/or the mopping parts, when controlling the cleaning robot to lift the brushing and sweeping parts and/or the mopping parts location for cleaning. When lifting the brushing and/or mopping parts, the dirt on the brushing and/or mopping parts may fall to the ground. By adjusting the position of the brushing and/or mopping parts when they are lifted, Cleaning can reduce or eliminate contamination of the location.
示例性的,所述第一预设条件包括至少以下一种:确定所述清洁机器人在执行导航任务、确定所述机器人执行跨越动作、确定所述清洁机器人上地毯、确定所述清洁机器人进入基站;所述第二预设条件包括至少以下一种:确定所述清洁机器人在执行导航任务、确定所述清洁机器人进入基站。举例而言,在清洁机器人结束通过拖擦件清洁非地毯区域以及开始向基站运动时、在清洁机器人结束通过拖擦件清洁一非地毯区域以及开始向另一非地毯区域运动时、在清洁机器人开始跨越地毯时,和/或在清洁机器人进入基站时,控制清洁机器人抬起拖擦件。举例而言,在清洁机器人结束通过刷扫件和拖擦件清洁非地毯区域以及开始向基站运动时、在清洁机器人结束通过刷扫件和拖擦件清洁一非地毯区域以及开始向另一非地毯区域运动时、和/或在清洁机器人进入基站时,控制清洁机器人抬起刷扫件。可以理解的,可以根据清洁机器人当前清洁的对象、运动的轨迹等信息,判断刷扫件和/或拖擦件等执行机构的动作状态,如判断哪些该动哪些不该动,可以通过控制相应的执行机构,实现以下至少一种效果:提高清洁机器人清洁的智能性、提高清洁效率、防止污染地面、防止污染清洁后的拖擦件、提高拖擦件的使用寿命,当然也不限于此。Exemplarily, the first preset condition includes at least one of the following: determining that the cleaning robot is performing a navigation task, determining that the robot performs a crossing action, determining that the cleaning robot is on the carpet, determining that the cleaning robot enters the base station ; The second preset condition includes at least one of the following: determining that the cleaning robot is performing a navigation task, or determining that the cleaning robot has entered the base station. For example, when the cleaning robot ends cleaning a non-carpet area with the mopping member and starts moving toward the base station, when the cleaning robot ends cleaning a non-carpet area with the mopping member and starts moving toward another non-carpet area, the cleaning robot When starting to cross the carpet, and/or when the cleaning robot enters the base station, the cleaning robot is controlled to lift the mopping member. For example, when the cleaning robot ends cleaning a non-carpet area through the brushing and mopping elements and starts to move toward the base station, the cleaning robot ends cleaning a non-carpet area through the brushing and mopping elements and starts to move toward another non-carpet area. When the carpet area moves and/or when the cleaning robot enters the base station, the cleaning robot is controlled to lift the sweeping piece. It can be understood that the action status of the actuators such as the brushing part and/or the mopping part can be judged based on the current cleaning object of the cleaning robot, the movement trajectory and other information. For example, to determine which parts should be moved and which ones should not be moved, the corresponding The actuator can achieve at least one of the following effects: improving the cleaning intelligence of the cleaning robot, improving cleaning efficiency, preventing contamination of the ground, preventing contamination of the cleaned mopping parts, and increasing the service life of the mopping parts. Of course, it is not limited to this.
示例性的,所述控制所述清洁机器人对所述刷扫件和/或所述拖擦件抬起时的位置进行清洁,包括:控制所述清洁机器人后退预设距离、自转、以及提高吸尘装置中风机的功率或转速,以吸取所述刷扫件和/或所述拖擦件抬起时掉落的脏污。举例而言,机器人扫拖同时之后在回到基站时,会有小部分残渣从刷扫件和/或拖擦件上掉落地面上,可以控制清洁机器人后退半步且自旋转,持续开大风机,将地面上掉落的脏污清理干净。Exemplarily, controlling the cleaning robot to clean the position of the brushing member and/or the mopping member when it is lifted includes: controlling the cleaning robot to retreat a preset distance, rotate, and raise the suction level. The power or rotation speed of the fan in the dust device is used to absorb the dirt dropped when the brushing member and/or the mopping member is lifted. For example, when the robot returns to the base station after sweeping and mopping, a small amount of residue will fall from the brushing and/or mopping parts to the ground. You can control the cleaning robot to take a half step back and rotate on its own, and continue to turn on the The fan cleans up the dirt falling on the ground.
本申请实施例提供的清洁机器人的控制方法,包括:获取清洁任务地图;判断所述清洁任务地图是否包括地毯区域,且当所述清洁任务地图包括地毯区域时,控制所述清洁机器人通过刷扫件对所述地毯区域的地毯进行清洁;控制所述清洁机器人至少通过拖擦件对所述清洁任务地图中的至少部分非地毯区域进行清洁;通过根据清洁任务地图中的地毯区域,自动对地毯进行刷扫,以及对非地毯的区域至少进行拖擦,而不需要用户对不同的区域设置不同的清洁方式,提高了清洁机器人清洁的智能性。The control method of a cleaning robot provided by embodiments of the present application includes: obtaining a cleaning task map; determining whether the cleaning task map includes a carpet area, and when the cleaning task map includes a carpet area, controlling the cleaning robot to sweep through cleaning the carpet in the carpet area; controlling the cleaning robot to clean at least part of the non-carpet area in the cleaning task map through at least the mopping component; automatically cleaning the carpet according to the carpet area in the cleaning task map Brushing and at least mopping non-carpet areas do not require the user to set different cleaning methods for different areas, which improves the intelligence of the cleaning robot.
在一些实施方式中,在托管模式时,可以先判断清洁任务地图中是否有地毯;当有地 毯时通过刷扫件对地毯进行清洁,当没有地毯时或者在完成对地毯的清洁之后通过刷扫件和拖擦件对地面进行扫拖同时清洁。在对房间进行清洁时,判断该房间是否超过预设时长(如一周)没有进行过沿边补漏清洁,若是则在对该房间进行沿边清洁时进行补漏动作,若否则单独对该房间进行沿边清洁而不进行补漏动作;在对房间进行沿边清洁后,对房间的地面进行清洁,可以根据地面材质设置对地压力和拖地湿度。还可以在清洁机器人抬起刷扫件和/或拖擦件之后,控制所述清洁机器人对所述刷扫件和/或所述拖擦件抬起时的位置进行清洁,以防止脏污重复污染地面。在对房间进行清洁后,可以根据预设清洁区域的脏污程度确定预设清洁区域是否包括需要重复拖擦的目标区域;以及对目标区域的至少部分区域进行重复拖擦。还可以正在执行清洁任务时,和/或在清洁任务完成时,输出用于指示各区域的脏污程度的变化的图像(可以称为脏污热力图),和/或输出用于指示清洁轨迹和的执行事项的可视化界面,如动画或者短视频。In some embodiments, in the hosting mode, you can first determine whether there is a carpet in the cleaning task map; when there is a carpet, the carpet is cleaned by brushing; when there is no carpet or after the carpet is cleaned, the carpet is cleaned by brushing The floor is swept and mopped simultaneously with the mopping and mopping parts. When cleaning a room, it is determined whether the room has not been cleaned along the edge for more than a preset period of time (such as one week). If so, the leakage filling action is performed when cleaning the room along the edge. Otherwise, the room is cleaned along the edge separately. No leak-proofing action is performed; after cleaning the edge of the room, clean the floor of the room. The ground pressure and mopping humidity can be set according to the ground material. After the cleaning robot lifts the brushing and/or mopping member, the cleaning robot can be controlled to clean the position of the brushing and/or mopping member when it is lifted to prevent repeated contamination. contaminate the ground. After the room is cleaned, it may be determined whether the preset cleaning area includes a target area that needs to be repeatedly mopped based on the degree of dirt in the preset cleaning area; and at least part of the target area may be repeatedly mopped. When a cleaning task is being executed, and/or when the cleaning task is completed, an image indicating changes in the degree of dirtiness of each area (which may be called a dirt heat map) is output, and/or an image indicating a cleaning trajectory is output. And a visual interface for executing tasks, such as animation or short video.
在一些实施方式中,在托管模式时,先判断是否有地毯,有地毯时抬起刷扫件、拖擦件等执行机构后驶出基站;驶出基站后边刷件工作,保持中扫件和拖擦件抬起,导航到地毯;到达地毯边缘后使边刷件的刷毛位于机器人机体的下方或者使边刷件可以自由旋转,放下中扫件控制其开始工作后上到地毯上,在地毯上时使边刷件可以自由旋转;清洁完当前地毯后导航至另一地毯以及清洁下一地毯,直至所有地毯清洁完成后导航回基站,在导航过程中,边刷件维持工作,中扫件和拖擦件维持抬起状态;在到达基站时收起各清洁执行机构,到达拖擦件的清洗槽之后,维持边刷件和中扫件收起/抬起状态,放下拖擦件以对拖擦件进行清洁。拖擦件清洁完成后,维持刷扫件抬起、抬起拖擦件,驶出基站;驶出基站后边刷件工作,中扫件和拖擦件维持抬起状态,导航到任务点,到达任务点后至少放下拖擦件,以至少对非地毯区域的地面进行清洁。In some embodiments, when in the hosting mode, first determine whether there is a carpet. If there is a carpet, lift the actuators such as the brushing part and the dragging part and then drive out of the base station; after driving out of the base station, the brushing part works to keep the scanning part and Lift the mopping part and navigate to the carpet; after reaching the edge of the carpet, place the bristles of the side brush part under the robot body or allow the side brush part to rotate freely, put down the middle sweeping part and control it to start working and then go up to the carpet, on the carpet When it is on, the side brush can rotate freely; after cleaning the current carpet, navigate to another carpet and clean the next carpet until all carpets are cleaned and navigate back to the base station. During the navigation process, the side brush keeps working and the middle scan and the mopping element remain in the raised state; stow away each cleaning actuator when arriving at the base station. After arriving at the cleaning tank of the mopping element, maintain the stowed/raised state of the side brush element and the middle sweeping element, and put down the mopping element to align the Mop pieces for cleaning. After the cleaning of the mopping part is completed, keep the brushing and mopping parts raised, lift the mopping part, and drive out of the base station; after driving out of the base station, brush the parts, keep the mid-scanning part and the mopping part in the lifted state, navigate to the task point, and arrive at Put the mop down after the task point to at least clean the non-carpeted areas of the floor.
示例性的,对地面的清洁可以包括对地面中各区域的清洁,如分块清洁,还可以包括沿边清洁或沿边补漏清洁。在对地面的清洁时,当满足拖擦件清洗条件,如清洁的地面面积或时间达到预设值时,导航回基站;或者当清洁机器人电量不足,或者完成清洁任务时,导航回基站;在基站可以对拖擦件进行清洁,还可以对清洁机器人充电。在对拖擦件进行清洁时,可以根据拖擦件脏污程度确定已经拖擦的地面脏污程度,在已经拖擦的地面脏污程度较大时可以导航至该地面进行重复拖擦,在已经拖擦的地面脏污程度较小时可以导航至另一区域进行清洁;当所有地面的清洁任务均已完成后,在基站对拖擦件进行清洁,清洁完成后还可以烘干拖擦件以及对清洁机器人充电,还可以将各执行机构都收起。For example, the cleaning of the floor may include cleaning of each area on the floor, such as block cleaning, and may also include edge cleaning or edge leakage cleaning. When cleaning the floor, when the cleaning conditions of the mop parts are met, such as when the cleaned floor area or time reaches the preset value, it navigates back to the base station; or when the cleaning robot has insufficient power or completes the cleaning task, it navigates back to the base station; The base station can clean the mopping parts and charge the cleaning robot. When cleaning the mopping parts, the degree of dirtiness of the ground that has been mopped can be determined based on the degree of dirtiness of the mopping parts. When the degree of dirtiness of the mopped ground is relatively large, you can navigate to the ground for repeated mopping. When the mopped floor is less dirty, you can navigate to another area for cleaning; when all floor cleaning tasks have been completed, the mopping parts can be cleaned at the base station. After the cleaning is completed, the mopping parts can be dried and To charge the cleaning robot, all actuators can also be stowed away.
清洁机器人可用于对地面进行自动清洁,应用场景可以为家庭室内清洁、大型场所清洁等。清洁机器人可以通过拖擦件对地面进行拖擦,拖擦件在拖擦地面一段时间后往往变得脏污或者电量不足,需要返回基站对拖擦件进行清洗或充电;目前通常在接收到清洁机器人返回基站进行维护的指令时,即停止清洁并立即返回基站,有时维护后需要再返回至停止点继续清洁,往返停止点的清洁策略,一定程度上降低了清洁效率。Cleaning robots can be used to automatically clean floors, and their application scenarios can include household indoor cleaning, large-scale place cleaning, etc. The cleaning robot can mop the floor through mopping parts. After mopping the floor for a period of time, the mopping parts often become dirty or have insufficient power. They need to return to the base station to clean or recharge the mopping parts; currently, they are usually cleaned after receiving When the robot returns to the base station for maintenance instructions, it stops cleaning and returns to the base station immediately. Sometimes it needs to return to the stop point to continue cleaning after maintenance. The cleaning strategy of going back and forth to the stop point reduces the cleaning efficiency to a certain extent.
请参阅图9,图9是本申请实施例提供的一种清洁机器人的控制方法的流程示意图。所述清洁机器人的控制方法可以应用在清洁系统中,用于对系统中的清洁机器人进行控制,以使清洁机器人执行清洁任务,对清洁任务地图对应的区域进行清洁等过程。Please refer to FIG. 9 , which is a schematic flowchart of a control method for a cleaning robot provided by an embodiment of the present application. The control method of the cleaning robot can be applied in a cleaning system to control the cleaning robot in the system so that the cleaning robot performs cleaning tasks and cleans the area corresponding to the cleaning task map.
清洁任务地图对应的区域可以为家庭空间、家庭空间的一个房间单元、一个房间单元的部分区域、大型场所或者大型场所的部分区域等任一个待清洁的区域。从另一角度看,清洁任务地图对应的区域可以指首次清洁的较大区域,例如整个房间单元;也可以指对较大区域进行首次清洁后需要进行补漏扫的区域,例如房间单元内的靠墙区域,或者障碍物区域。The area corresponding to the cleaning task map can be any area to be cleaned such as a family space, a room unit of a family space, a partial area of a room unit, a large place, or a part of a large place. From another perspective, the area corresponding to the cleaning task map can refer to the larger area that is cleaned for the first time, such as the entire room unit; it can also refer to the area that needs to be cleaned after the first cleaning of the larger area, such as the backrest in the room unit. Wall area, or obstacle area.
可选地,清洁任务地图可以是响应于建图指令,对当前所在空间进行探索建立的,或者,可以是根据清洁机器人在清洁过程中识别的障碍物、地毯等更新的;可选地,清洁任务地图可以是用户指定的清洁区域的地图,例如响应于用户在地图上选定的清洁区域例如一个或多个房间,确定该一个或多个房间为清洁任务地图,或者,响应于用户在地图上圈出的清 洁区域例如一个或多个房间的部分区域,确定该一个或多个房间的部分区域为清洁任务地图,当然也不限于此。Optionally, the cleaning task map can be established by exploring the current space in response to mapping instructions, or it can be updated based on obstacles, carpets, etc. identified by the cleaning robot during the cleaning process; optionally, the cleaning The task map may be a map of a cleaning area specified by the user. For example, in response to the user selecting a cleaning area such as one or more rooms on the map, determining the one or more rooms as a cleaning task map, or in response to the user selecting the cleaning area on the map. The cleaning area circled above is, for example, a partial area of one or more rooms. The partial area of one or more rooms is determined as a cleaning task map, and is certainly not limited to this.
本申请实施例还提供了一种清洁系统。如图2所示,清洁系统包括一个或多个清洁机器人100,以及一个或多个基站200。基站200用于和清洁机器人100配合使用,至少用于对清洁机器人进行维护;例如,基站200可以向清洁机器人100进行充电、基站200可以向清洁机器人100提供停靠位置等。基站200还可以对清洁机器人100的清洁件的进行清洁或者更换,其中,清洁件可以包括刷扫件,如边刷、中刷,刷扫件用于对地面进行刷扫以清除地面的垃圾或灰尘,清洁件还可以包括拖擦件,拖擦件用于对地面进行拖擦以清洁地面的污渍。An embodiment of the present application also provides a cleaning system. As shown in FIG. 2 , the cleaning system includes one or
清洁系统还包括控制装置300,控制装置300可以用于实现本申请实施例的清洁机器人的控制方法的步骤。可选地,清洁机器人100的机器人控制器和/或基站200的基站控制器可以单独或者配合作为控制装置300,用于实现本申请实施例的方法的步骤。在另一些实施方式中,清洁系统包括单独的控制装置300,用于实现本申请实施例的方法的步骤,该控制装置300可以设置在清洁机器人100上,或者可以设置在基站200上;当然也不限于此,例如控制装置300可以为除清洁机器人100和基站200之外的装置,如家庭智能终端、总控设备等。The cleaning system also includes a
清洁机器人100可用于对地面进行自动清洁,清洁机器人100的应用场景可以为家庭室内清洁、大型场所清洁等。The cleaning
如图9所示,本申请实施例的清洁机器人的控制方法包括步骤S110至步骤S130。As shown in FIG. 9 , the control method of the cleaning robot according to the embodiment of the present application includes steps S110 to S130.
S110、获取第一维护指令。S110. Obtain the first maintenance instruction.
清洁机器人的拖擦件能够吸附的脏污量是有限的,当拖擦件吸附较多的脏污时对地面的清洁效果较差,需要对拖擦件进行维护,例如清洁拖擦件或更换拖擦件,以保证维护后的拖擦件有较好的清洁效果;例如清洁机器人返回基站对拖擦件进行清洁或更换;可选地,拖擦件的维护也可以不返回基站而由清洁机器人完成,例如清洁机器人自带水箱,可以直接对拖擦件进行清洗,或者清洁机器人自带拖擦件更换装置,可以直接对拖擦件进行更换。The amount of dirt that the cleaning robot's mopping parts can absorb is limited. When the mopping parts absorb more dirt, the cleaning effect on the ground is poor. The mopping parts need to be maintained, such as cleaning or replacing them. To ensure that the mopping parts have a better cleaning effect after maintenance; for example, the cleaning robot returns to the base station to clean or replace the mopping parts; optionally, the mopping parts can also be maintained by cleaning without returning to the base station. Robot completion, for example, the cleaning robot has its own water tank, which can directly clean the mopping parts, or the cleaning robot has its own mopping part replacement device, which can directly replace the mopping parts.
清洁机器人的电量也是有限的,在对地面清洁时若电量降低到预设电量,需要返回基站进行充电;清洁机器人的拖擦件上的水量和/或清洁机器人上用于给拖擦件供水的水箱的水量也是有限的,当水量不足时可以返回基站加水;清洁机器人上用于收集脏污的集尘盒能够容纳的脏污量也是有限的,当容纳的脏污量较多时也需要进行维护。The power of the cleaning robot is also limited. If the power drops to the preset power when cleaning the floor, it needs to return to the base station for charging; the amount of water on the mopping part of the cleaning robot and/or the water supply on the cleaning robot is used to supply water to the mopping part. The amount of water in the water tank is also limited. When the water amount is insufficient, you can return to the base station to add water; the dust box on the cleaning robot used to collect dirt can also hold a limited amount of dirt. When the amount of dirt contained is large, maintenance is also required. .
在一些实施方式中,所述第一维护指令为根据用户的维护控制操作生成。例如用户在睡觉前进行维护控制操作,如在清洁机器人、基站或用户终端的交互单元进行所述维护控制操作,以及根据所述维护控制操作生成所述第一维护指令。或者根据用户的维护控制操作确定维护规则,如在每天晚上九点对清洁机器人进行维护,则在每天晚上九点生成所述第一维护指令,当然也不限于此,例如可以每隔六小时对清洁机器人进行维护。In some implementations, the first maintenance instruction is generated according to a user's maintenance control operation. For example, the user performs a maintenance control operation before going to bed, such as performing the maintenance control operation on an interactive unit of a cleaning robot, a base station or a user terminal, and generating the first maintenance instruction according to the maintenance control operation. Or the maintenance rules are determined according to the user's maintenance control operation. For example, if the cleaning robot is maintained at nine o'clock every night, the first maintenance instruction is generated at nine o'clock every night. Of course, it is not limited to this. For example, the cleaning robot can be maintained every six hours. Cleaning robot for maintenance.
在一些实施方式中,所述第一维护指令为根据距离上次维护的时间生成。例如距离上次维护的时间为六小时时,生成所述第一维护指令,以周期性的控制所述清洁机器人进行维护。或者可以根据清洁机器人的工作时长生成所述第一维护指令;例如清洁机器人在每次清洁10分钟时生成所述第一维护指令。In some implementations, the first maintenance instruction is generated based on the time since the last maintenance. For example, when the time since the last maintenance is six hours, the first maintenance instruction is generated to periodically control the cleaning robot to perform maintenance. Or the first maintenance instruction can be generated according to the working time of the cleaning robot; for example, the cleaning robot generates the first maintenance instruction every time it cleans for 10 minutes.
在一些实施方式中,所述获取第一维护指令,包括:在所述清洁机器人对预设清洁区域进行清洁时,获取所述清洁机器人完成的工作量;当所述清洁机器人完成的工作量的量值达到第一工作量阈值时,生成所述第一维护指令。In some embodiments, obtaining the first maintenance instruction includes: obtaining the workload completed by the cleaning robot when the cleaning robot cleans the preset cleaning area; when the workload completed by the cleaning robot exceeds When the magnitude reaches the first workload threshold, the first maintenance instruction is generated.
可以理解的,清洁机器人在两次维护之间能够完成的工作量是有限的,例如当拖擦件吸附较多的脏污时对地面的清洁效果较差,需要对拖擦件进行维护;因此在清洁机器人完成的工作量达到第一工作量阈值时生成所述第一维护指令,以控制清洁机器人进行维护,可以使维护后的清洁机器人有较好的清洁效果。It is understandable that the amount of work that a cleaning robot can complete between two maintenances is limited. For example, when the mop part absorbs a lot of dirt, the cleaning effect on the ground is poor, and the mop part needs to be maintained; therefore, The first maintenance instruction is generated when the workload completed by the cleaning robot reaches the first workload threshold to control the cleaning robot to perform maintenance, so that the maintained cleaning robot can have a better cleaning effect.
示例性的,所述工作量包括以下至少一种:所述清洁机器人的拖擦件拖擦地面时吸附的脏污量、所述清洁机器人清洁地面时的耗电量、所述清洁机器人清洁地面时的耗水量、所述清洁机器人清洁地面时的脏污收集量、所述清洁机器人清洁地面时的污水收集量、所述清洁机器人清洁地面的面积、所述清洁机器人清洁地面的路径长度。Exemplarily, the workload includes at least one of the following: the amount of dirt adsorbed by the cleaning robot's mopping part when mopping the floor, the power consumption of the cleaning robot when cleaning the floor, the amount of time the cleaning robot cleans the floor. The amount of water consumed when the cleaning robot cleans the floor, the amount of dirt collected when the cleaning robot cleans the floor, the amount of sewage collected when the cleaning robot cleans the floor, the area of the floor cleaned by the cleaning robot, and the path length of the floor cleaned by the cleaning robot.
示例性的,所述第一工作量阈值N1可以根据清洁机器人的性能参数确定,如根据续航时间、清水箱容量、集尘箱容量、污水箱容量、拖擦件的最大脏污值d_max等中的至少一项确定。For example, the first workload threshold N1 can be determined based on the performance parameters of the cleaning robot, such as the battery life, clean water tank capacity, dust collection tank capacity, sewage tank capacity, the maximum dirt value d_max of the mopping part, etc. At least one of them is confirmed.
举例而言,所述工作量包括清洁机器人清洁地面的面积时,所述第一工作量阈值可以根据拖擦件的清洁效果与清洁机器人清洁地面的面积的变化关系确定;例如在清洁机器人维护后控制清洁机器人对地面进行清洁,当清洁效果较差时,根据清洁机器人清洁的地面的面积确定所述第一工作量阈值。For example, when the workload includes the area of the floor cleaned by the cleaning robot, the first workload threshold can be determined based on the changing relationship between the cleaning effect of the mopping element and the area of the floor cleaned by the cleaning robot; for example, after maintenance of the cleaning robot The cleaning robot is controlled to clean the floor. When the cleaning effect is poor, the first workload threshold is determined according to the area of the floor cleaned by the cleaning robot.
举例而言,所述工作量包括所述清洁机器人清洁地面时的耗水量时,所述第一工作量阈值可以根据清水箱容量确定;所述工作量包括所述清洁机器人清洁地面时的污水收集量时,所述第一工作量阈值可以根据污水箱容量确定。For example, when the workload includes water consumption when the cleaning robot cleans the floor, the first workload threshold can be determined based on the capacity of the clean water tank; the workload includes sewage collection when the cleaning robot cleans the floor. When measuring, the first workload threshold may be determined based on the capacity of the sewage tank.
举例而言,所述工作量包括拖擦件拖擦地面时吸附的脏污量时,所述第一工作量阈值可以根据拖擦件的清洁效果与拖擦件拖擦地面时吸附的脏污量的变化关系确定;例如在拖擦件维护后对地面进行拖擦,当拖擦件对地面的拖擦清洁效果很差时,根据拖擦件吸附的脏污量,即根据拖擦件的脏污值d确定所述第一工作量阈值;当然也不限于此,例如所述第一工作量阈值可以根据所述拖擦件的最大脏污值d_max确定,最大脏污值d_max为经验值,例如可以在实验室中测得。For example, when the workload includes the amount of dirt adsorbed by the mopping part when mopping the floor, the first workload threshold may be based on the cleaning effect of the mopping part and the amount of dirt adsorbed by the mopping part when mopping the floor. The relationship between the changes in quantity is determined; for example, when the floor is mopped after the mop part is maintained, when the mopping effect of the mop part on the ground is very poor, the amount of dirt absorbed by the mop part will be determined based on the amount of dirt absorbed by the mop part. The dirt value d determines the first workload threshold; of course, it is not limited to this. For example, the first workload threshold can be determined based on the maximum dirt value d_max of the mopping element, and the maximum dirt value d_max is an empirical value. , which can be measured in a laboratory, for example.
在一些实施方式中,当所述清洁机器人完成的工作量达到第一工作量阈值后,所述清洁机器人仍能够进行至少一次维护,如清洁机器人清洁地面时的耗电量达到耗电量对应的第一工作量阈值后,清洁机器人的剩余电能仍能够支持清洁机器人返回基站进行充电。In some embodiments, after the workload completed by the cleaning robot reaches the first workload threshold, the cleaning robot can still perform at least one maintenance, such as when the power consumption of the cleaning robot when cleaning the floor reaches the corresponding power consumption. After the first workload threshold, the remaining power of the cleaning robot can still support the cleaning robot to return to the base station for charging.
示例性的,当所述清洁机器人完成的工作量达到第一工作量阈值后,仍能够工作一段时间,如对部分地面进行清洁,以及在对工作一段时间之后,仍能够进行至少一次维护。For example, when the workload completed by the cleaning robot reaches the first workload threshold, it can still work for a period of time, such as cleaning part of the floor, and after working for a period of time, it can still perform at least one maintenance.
举例而言,所述第一工作量阈值小于所述第二工作量阈值,例如所述第一工作量阈值为所述第二工作量阈值的0.6倍至0.8倍,当然也不限于此。可选的,当所述清洁机器人完成的工作量达到第一工作量阈值后,仍能够工作一段时间,当所述清洁机器人完成的工作量达到所述第二工作量阈值后,则强制结束工作以及进行维护。例如第二工作量阈值N2为绝对回洗阈值,当清洁机器人的拖擦件拖擦地面时吸附的脏污量达到所述绝对回洗阈值时,确定拖擦件达到最大脏污值d_max,无法再进行拖擦清洁,必须对该拖擦件进行维护。For example, the first workload threshold is smaller than the second workload threshold, for example, the first workload threshold is 0.6 to 0.8 times the second workload threshold, and is certainly not limited thereto. Optionally, when the workload completed by the cleaning robot reaches the first workload threshold, it can still work for a period of time. When the workload completed by the cleaning robot reaches the second workload threshold, the work is forcibly ended. and perform maintenance. For example, the second workload threshold N2 is an absolute backwash threshold. When the amount of dirt adsorbed by the cleaning robot's mopping part reaches the absolute backwashing threshold when mopping the floor, it is determined that the mopping part reaches the maximum dirt value d_max, and it is impossible to Before mopping and cleaning, the mopping parts must be maintained.
其中,预设清洁区域可以通过对清洁任务地图,即待清洁区域的房间进行划分得到。待清洁区域可以为家庭空间、家庭空间的一个房间单元、一个房间单元的部分区域、大型场所或者大型场所的部分区域等任一个待清洁的区域。Among them, the preset cleaning area can be obtained by dividing the cleaning task map, that is, the room in the area to be cleaned. The area to be cleaned can be any area to be cleaned such as a family space, a room unit of a family space, a part of a room unit, a large place or a part of a large place.
举例而言,一个房间可以为一个预设清洁区域,或者一个房间有多个预设清洁区域;当然也不限于此,例如一个预设清洁区域包括一个房间以及另一个房间的至少部分区域。可选的,预设清洁区域可以根据用户在清洁任务地图上的划分确定操作,或者根据预设的区域划分规则进行划分确定。For example, a room may be a preset cleaning area, or a room may have multiple preset cleaning areas; of course, it is not limited thereto. For example, a preset cleaning area includes one room and at least part of another room. Optionally, the preset cleaning area can be determined based on the user's division on the cleaning task map, or the division can be determined based on preset area division rules.
在一些实施方式中,所述在所述清洁机器人对所述预设清洁区域进行清洁时,获取所述清洁机器人完成的工作量,包括:获取所述预设清洁区域中各单位区域的工作量;根据所述清洁机器人清洁过的单位区域的工作量,确定所述清洁机器人完成的工作量。In some embodiments, obtaining the workload completed by the cleaning robot when the cleaning robot cleans the preset cleaning area includes: obtaining the workload of each unit area in the preset cleaning area. ; Determine the workload completed by the cleaning robot based on the workload of the unit area cleaned by the cleaning robot.
示例性的,可以获取预设清洁区域所在房间的图形学特征和/或所述房间的房间标识,根据所述图形学特征和/或所述房间的房间标识确定所述预设清洁区域中各单位区域的工作量。For example, the graphical characteristics of the room where the preset cleaning area is located and/or the room identification of the room can be obtained, and each element in the preset cleaning area is determined based on the graphical characteristics and/or the room identification of the room. The workload per unit area.
举例而言,所述单位区域可以为清洁任务地图中的栅格,当然也不限于此,单位区域 可以为任意面积的区域,如0.5平方米大小的区域、1平方米大小的区域;单位区域可以为矩形或正方形,当然也不限于此,例如为平行四边形。For example, the unit area can be a grid in the cleaning task map, but of course it is not limited to this. The unit area can be an area of any size, such as an area of 0.5 square meters or an area of 1 square meter; the unit area It may be a rectangle or a square, and of course is not limited thereto, for example, it may be a parallelogram.
示例性的,同一房间中不同单位区域的工作量存在差别,例如往往靠近墙角或有较多障碍物的地方是更脏的区域;示例性的,可以根据所述单位区域和所述房间的边界和/或所述房间中的障碍物之间的距离确定所述单位区域的工作量。举例而言,所述单位区域的工作量,与所述单位区域和所述房间的边界和/或所述房间中的障碍物之间的距离负相关。For example, there are differences in the workload of different unit areas in the same room. For example, areas near corners or with more obstacles are often dirtier areas. For example, the workload can be determined according to the boundaries of the unit area and the room. and/or the distance between obstacles in the room determines the workload per unit area. For example, the workload of the unit area is negatively correlated with the distance between the unit area and the boundary of the room and/or obstacles in the room.
如图10所示,所述预设清洁区域的环境地图中包含多个栅格,一个栅格即为一个单位区域,或者多个栅格组合为一个单位区域,计算环境地图中每个栅格与障碍物的距离,从而确定每个单位区域的工作量,多个栅格组合为一个单位区域时根据所述多个栅格与障碍物的最大距离、最小距离或者距离的平均值确定所述单位区域的工作量。As shown in Figure 10, the environment map of the preset cleaning area contains multiple grids. One grid is a unit area, or multiple grids are combined into a unit area. Each grid in the environment map is calculated. The distance to the obstacle is used to determine the workload of each unit area. When multiple grids are combined into one unit area, the maximum distance, the minimum distance, or the average of the distances between the multiple grids and the obstacle is determined. The workload per unit area.
举例而言,所述单位区域的工作量包括所述清洁机器人的拖擦件拖擦所述单位区域时吸附的脏污量;所述清洁机器人的拖擦件拖擦所述单位区域时吸附的脏污量,与所述单位区域和房间的边界和/或所述房间中的障碍物之间的距离负相关。举例而言,所述单位区域的工作量包括所述清洁机器人清洁所述单位区域时的脏污收集量;所述清洁机器人清洁所述单位区域时的脏污收集量,与所述单位区域和房间的边界和/或所述房间中的障碍物之间的距离负相关。For example, the workload of the unit area includes the amount of dirt absorbed by the cleaning robot's mopping member when mopping the unit area; The amount of dirt is inversely related to the distance between the unit area and the boundaries of the room and/or the obstacles in the room. For example, the workload of the unit area includes the amount of dirt collected when the cleaning robot cleans the unit area; the amount of dirt collected when the cleaning robot cleans the unit area is equal to the unit area and The boundaries of a room and/or the distance between obstacles in said room are inversely related.
可选的,越是接近障碍物的单位区域,脏污量越大,即工作量越大,或者可以说清洁机器人清洁该单位区域的清洁代价更高。图10中,A表示障碍物,黑色粗线表示墙壁,每个栅格上的数字表示该栅格的工作量;例如,与障碍物或墙壁相邻的栅格(可以称为距离为1的栅格),工作量为5,距离为2的栅格的工作量为3,距离大于2的栅格的工作量为1;清洁区域B的工作量为5+5+5+3=18,清洁区域C的工作量为1+3+1+3=8。Optionally, the closer the unit area is to the obstacle, the greater the amount of dirt, that is, the greater the workload, or it can be said that the cleaning cost of the cleaning robot to clean the unit area is higher. In Figure 10, A represents the obstacle, the thick black line represents the wall, and the number on each grid represents the workload of that grid; for example, the grid adjacent to the obstacle or wall (can be called a grid with a distance of 1 grid), the workload is 5, the workload of the grid with a distance of 2 is 3, the workload of the grid with a distance greater than 2 is 1; the workload of cleaning area B is 5+5+5+3=18, The workload of cleaning area C is 1+3+1+3=8.
举例而言,所述单位区域的工作量包括所述清洁机器人的拖擦件拖擦所述单位区域时吸附的脏污量;所述清洁机器人的拖擦件拖擦所述单位区域时吸附的脏污量,与所述单位区域的脏污程度正相关。举例而言,所述单位区域的工作量包括所述清洁机器人清洁所述单位区域时的脏污收集量;所述清洁机器人清洁所述单位区域时的脏污收集量,与所述单位区域的脏污程度正相关。For example, the workload of the unit area includes the amount of dirt absorbed by the cleaning robot's mopping member when mopping the unit area; The amount of dirt is positively related to the dirt level of the unit area. For example, the workload of the unit area includes the amount of dirt collected by the cleaning robot when cleaning the unit area; the amount of dirt collected by the cleaning robot when cleaning the unit area, and the amount of dirt collected by the cleaning robot when cleaning the unit area. The degree of dirtiness is positively correlated.
示例性的,不同房间中单位区域的工作量存在差别,例如往往餐厅/客厅等公共区域是人员活动较多的地方,是更容易脏的区域;而卧室/书房等非公共区域是人员活动较少的地方,是较干净的区域;举例而言,房间标识为餐厅/客厅的房间中单位区域的工作量,大于卧室/书房中单位区域的工作量。For example, there are differences in the workload of unit areas in different rooms. For example, public areas such as restaurants/living rooms are often areas where people move more and are more likely to get dirty; while non-public areas such as bedrooms/studies are areas where people move more frequently. The place with less is a cleaner area; for example, the workload of the unit area in the room marked as dining room/living room is greater than the workload of the unit area in the bedroom/study.
在一些实施方式中,所述房间的图形学特征包括房间中脏污的分布情况(如脏污热力图),例如各单位区域的脏污程度;可以根据房间中单位区域的脏污程度确定各所述单位区域的工作量;例如所述单位区域的工作量,与所述单位区域的脏污程度正相关。In some embodiments, the graphical characteristics of the room include the distribution of dirt in the room (such as a dirt heat map), such as the dirt level of each unit area; each unit area can be determined based on the dirt level of the unit area in the room. The workload of the unit area; for example, the workload of the unit area is positively correlated with the degree of dirt of the unit area.
示例性的,房间中脏污的分布情况可以根据清洁机器人的传感器,如视觉传感器的检测结果确定;或者可以根据单独的图像传感器对房间内的地面进行拍摄,对拍摄的图像进行识别,确定房间中脏污的分布情况;或者可以在清洁机器人对房间中的不同区域清洁完成后,根据清洁拖擦件的污水的检测信息确定不同区域的脏污情况,或者根据集尘盒中的脏污量确定不同区域的脏污情况。For example, the distribution of dirt in the room can be determined based on the detection results of the cleaning robot's sensors, such as vision sensors; or a separate image sensor can be used to photograph the floor in the room, identify the captured images, and determine the room. The distribution of dirt in the room; or after the cleaning robot completes cleaning different areas in the room, the dirt status in different areas can be determined based on the detection information of the sewage in the cleaning mop parts, or based on the amount of dirt in the dust box Determine the dirtiness of different areas.
需要说明的是,房间中脏污的分布情况可以为房间中当前的脏污的分布情况,还可以为历史数据中房间中脏污的分布情况。It should be noted that the distribution of dirt in the room can be the current distribution of dirt in the room, or it can also be the distribution of dirt in the room in historical data.
其中,拖擦地面时吸附的脏污量或者脏污收集量,相较于已清洁面积、路径长度等确定工作量,可以更准确的体现清洁机器人的工作量;例如在地面脏污程度较低时,拖擦件可以清洁的面积更多,如果仅将已清洁面积作为工作量去控制清洁机器人进行维护,会使得维护的次数较多,降低了清洁效率;而根据拖擦地面时吸附的脏污量或者脏污收集量控制清洁机器人进行维护,可以降低维护的次数,从而提高清洁效率。Among them, the amount of dirt absorbed or the amount of dirt collected when mopping the floor can more accurately reflect the workload of the cleaning robot than determining the workload such as the cleaned area and path length; for example, when the ground is less dirty When the mopping part is used, the area that can be cleaned is more. If only the cleaned area is used as the workload to control the cleaning robot for maintenance, the number of maintenance will be more and the cleaning efficiency will be reduced. According to the dirt adsorbed when mopping the floor, Controlling the amount of dirt or dirt collected by the cleaning robot for maintenance can reduce the number of maintenance times and thereby improve cleaning efficiency.
在一些实施方式中,所述预设清洁区域的工作量的量值均小于或等于第二工作量阈值,所述第二工作量阈值大于所述第一工作量阈值,以使所述清洁机器人在清洁完所述预设清洁区域时,所述清洁机器人的工作量的量值不超过所述第二工作量阈值。In some embodiments, the magnitude of the workload of the preset cleaning area is less than or equal to a second workload threshold, and the second workload threshold is greater than the first workload threshold, so that the cleaning robot When the preset cleaning area is cleaned, the magnitude of the workload of the cleaning robot does not exceed the second workload threshold.
示例性的,可以获取房间的图形学特征,图形学特征包括房间的边界;根据所述第二工作量阈值和所述图形学特征,确定房间的分割线,以使分割线和房间的边界形成至少两个预设清洁区域,且各所述预设清洁区域的工作量的量值均小于或等于所述第二工作量阈值。以便清洁机器人在每完成一个预设清洁区域的工作量之后中断当前清洁任务;可以使得清洁机器人在根据所述预设清洁区域对房间进行清洁时可以起到较好的清洁效果和较高的清洁效率。For example, the graphical characteristics of the room can be obtained, and the graphical characteristics include the boundaries of the room; according to the second workload threshold and the graphical characteristics, the dividing line of the room is determined, so that the dividing line and the boundary of the room form There are at least two preset cleaning areas, and the magnitude of the workload of each preset cleaning area is less than or equal to the second workload threshold. So that the cleaning robot can interrupt the current cleaning task after completing the workload of a preset cleaning area; it can make the cleaning robot achieve better cleaning effect and higher cleaning efficiency when cleaning the room according to the preset cleaning area. efficiency.
S120、响应于所述第一维护指令,确定所述清洁机器人的任务执行状态。S120. In response to the first maintenance instruction, determine the task execution status of the cleaning robot.
在一些实施方式中,所述响应于所述第一维护指令,确定所述清洁机器人的任务执行状态,包括:响应于所述第一维护指令,确定所述清洁机器人的当前清洁任务中的已执行任务和/或未执行任务。In some embodiments, in response to the first maintenance instruction, determining the task execution status of the cleaning robot includes: in response to the first maintenance instruction, determining whether the current cleaning task of the cleaning robot has been completed. Tasks performed and/or tasks not performed.
示例性的,所述清洁机器人的当前清洁任务为对所述预设清洁区域进行清洁。For example, the current cleaning task of the cleaning robot is to clean the preset cleaning area.
示例性的,确定所述清洁机器人的任务执行状态包括确定以下至少一种:确定清洁机器人当前清洁任务的进度、确定清洁机器人已执行任务的类型、确定未执行任务的类型、确定未执行任务的工作量。Exemplarily, determining the task execution status of the cleaning robot includes determining at least one of the following: determining the progress of the current cleaning task of the cleaning robot, determining the type of tasks that the cleaning robot has performed, determining the type of tasks that have not been performed, and determining the number of tasks that have not been performed. workload.
S130、根据所述任务执行状态,控制所述清洁机器人进行维护。S130. Control the cleaning robot to perform maintenance according to the task execution status.
在本申请实施例中,在获取到所述第一维护指令时,不是直接控制所述清洁机器人进行维护,而是响应于所述第一维护指令,确定所述清洁机器人的任务执行状态,以及根据所述任务执行状态,控制所述清洁机器人进行维护。In the embodiment of the present application, when the first maintenance instruction is obtained, the cleaning robot is not directly controlled to perform maintenance, but the task execution status of the cleaning robot is determined in response to the first maintenance instruction, and According to the task execution status, the cleaning robot is controlled to perform maintenance.
示例性的,所述根据所述任务执行状态,控制所述清洁机器人进行维护,包括:根据以下至少一种:所述清洁机器人当前清洁任务的进度、所述清洁机器人已执行任务的类型、所述清洁机器人未执行任务的类型、所述未执行任务的工作量,控制所述清洁机器人进行维护。Exemplarily, controlling the cleaning robot to perform maintenance according to the task execution status includes: according to at least one of the following: the progress of the current cleaning task of the cleaning robot, the type of tasks that the cleaning robot has performed, the The type of tasks not performed by the cleaning robot and the workload of the tasks not performed are described, and the cleaning robot is controlled to perform maintenance.
举例而言,控制所述清洁机器人进行维护,包括:生成第二维护指令以直接控制所述清洁机器人进行维护,或者在清洁机器人完成所述未执行任务中的至少部分任务之后生成第二维护指令以控制所述清洁机器人进行维护。For example, controlling the cleaning robot to perform maintenance includes: generating a second maintenance instruction to directly control the cleaning robot to perform maintenance, or generating a second maintenance instruction after the cleaning robot completes at least part of the unperformed tasks. To control the cleaning robot for maintenance.
通过根据所述清洁机器人的任务执行状态,以对应的控制策略控制所述清洁机器人进行维护,可以使得清洁机器人的维护时机有一定的宽松调节范围,以减少清洁机器人维护对清洁效率的影响。By controlling the cleaning robot to perform maintenance according to the task execution status of the cleaning robot with a corresponding control strategy, the maintenance timing of the cleaning robot can have a certain loose adjustment range to reduce the impact of cleaning robot maintenance on cleaning efficiency.
需要说明的是,所述控制所述清洁机器人进行维护,包括但不限于以下至少一种:控制清洁机器人返回基站,由基站对所述清洁机器人进行维护;由所述清洁机器人自行进行维护,如清洁拖擦件;提示用户对所述清洁机器人进行维护,例如向用户终端发送提示信息,提示用户维护清洁机器人上用于收集脏污的集尘盒。It should be noted that controlling the cleaning robot to perform maintenance includes but is not limited to at least one of the following: controlling the cleaning robot to return to the base station, and the base station performs maintenance on the cleaning robot; having the cleaning robot perform maintenance on its own, such as Cleaning and mopping parts; prompting the user to perform maintenance on the cleaning robot, for example, sending prompt information to the user terminal to prompt the user to maintain the dust box on the cleaning robot for collecting dirt.
示例性的,所述根据所述任务执行状态,控制所述清洁机器人进行维护,包括:当所述任务执行状态被确定为所述清洁机器人完成所述当前清洁任务时,控制所述清洁机器人进行维护,即根据所述任务执行状态立即控制所述清洁机器人进行维护。例如当清洁机器人完成一次对预设清洁的清洁时,清洁机器人完成的工作量达到第一工作量阈值,可以立即控制所述清洁机器人进行维护;还可以在维护结束后,控制清洁机器人再次对所述预设清洁区域进行重复清洁,或者也可以对清洁任务地图中的其他预设清洁区域进行清洁。Exemplarily, controlling the cleaning robot to perform maintenance according to the task execution status includes: when the task execution status is determined to mean that the cleaning robot completes the current cleaning task, controlling the cleaning robot to perform maintenance. Maintenance means immediately controlling the cleaning robot to perform maintenance according to the task execution status. For example, when the cleaning robot completes a preset cleaning, and the workload completed by the cleaning robot reaches the first workload threshold, the cleaning robot can be immediately controlled to perform maintenance; the cleaning robot can also be controlled to perform maintenance again after the maintenance is completed. The above preset cleaning area can be repeatedly cleaned, or other preset cleaning areas in the cleaning task map can be cleaned.
示例性的,所述根据所述任务执行状态,控制所述清洁机器人进行维护,包括:当确定所述未执行任务的工作量小于或等于预设工作量时,控制所述清洁机器人在完成所述未执行任务之后进行维护。Exemplarily, controlling the cleaning robot to perform maintenance according to the task execution status includes: when it is determined that the workload of the unexecuted task is less than or equal to the preset workload, controlling the cleaning robot to complete all tasks. Perform maintenance after the tasks described above are not performed.
举例而言,所述预设工作量可以根据第二工作量阈值与所述第一工作量阈值的差值确 定,例如所述预设工作量为所述差值的0.6至1倍,如0.8倍或0.9倍。For example, the preset workload can be determined based on the difference between the second workload threshold and the first workload threshold. For example, the preset workload is 0.6 to 1 times the difference, such as 0.8 times or 0.9 times.
当获取到所述第一维护指令时,所述清洁机器人的当前清洁任务还未完成,例如所述预设清洁区域还有若干个单位区域没有拖擦,则判断所述当前清洁任务中未执行任务的工作量是否小于或等于预设工作量,例如确定所述若干个单位区域的工作量之和是否小于或等于预设工作量。当所述未执行任务的工作量小于或等于预设工作量时,可以确定清洁机器人剩余的工作能力足够完成所述未执行任务,以及在完成所述未执行任务之后进行维护,则控制所述清洁机器人在完成所述未执行任务之后进行维护;可选的,在维护结束后可以不需要再返回所述预设清洁区域执行所述当前清洁任务,以降低清洁机器人的维护次数。When the first maintenance instruction is obtained and the current cleaning task of the cleaning robot has not been completed, for example, there are still several unit areas that have not been mopped in the preset cleaning area, then it is determined that the current cleaning task has not been executed. Whether the workload of the task is less than or equal to the preset workload, for example, determine whether the sum of the workload of several unit areas is less than or equal to the preset workload. When the workload of the unexecuted tasks is less than or equal to the preset workload, it can be determined that the remaining working capacity of the cleaning robot is sufficient to complete the unexecuted tasks, and maintenance is performed after completing the unexecuted tasks, then the control The cleaning robot performs maintenance after completing the unexecuted tasks; optionally, after the maintenance is completed, there is no need to return to the preset cleaning area to perform the current cleaning task, so as to reduce the number of maintenance times of the cleaning robot.
示例性的,所述根据所述任务执行状态,控制所述清洁机器人进行维护,包括:当所述未执行任务的工作量大于所述预设工作量,且所述未执行任务的类型包括所述清洁机器人向房间的门口移动时,控制所述清洁机器人在移动到所述房间的门口后进行维护。使得对预设清洁区域的清洁轨迹和返回基站维护的轨迹(如回洗轨迹)匹配,当清洁机器人按照规划路径到达房间门口,再返回基站进行维护,可以降低返回基站的路径消耗。Exemplarily, controlling the cleaning robot to perform maintenance according to the task execution status includes: when the workload of the unexecuted tasks is greater than the preset workload, and the type of the unexecuted tasks includes all When the cleaning robot moves to the door of the room, the cleaning robot is controlled to perform maintenance after moving to the door of the room. Match the cleaning trajectory of the preset cleaning area with the trajectory returning to the base station for maintenance (such as backwashing trajectory). When the cleaning robot reaches the door of the room according to the planned path, and then returns to the base station for maintenance, the path consumption of returning to the base station can be reduced.
举例而言,在清洁机器人对房间进行沿边清洁,或者以弓形路径对所述房间进行清洁时,清洁机器人的至少部分路径为向房间的门口移动的路径。当获取到所述第一维护指令时,所述清洁机器人正在沿所述至少部分路径向房间的门口移动,即清洁机器人未执行任务的类型为沿所述至少部分路径向房间的门口移动,则可以继续沿所述至少部分路径向房间的门口移动至少部分距离(到达门口或者到达门口附近)以及对所述至少部分路径对应的区域进行清洁,之后生成所述第二维护指令以控制所述清洁机器人进行维护。例如在获取到所述第一维护指令时,仅剩向房间的门口移动的路径的区域未清洁,在沿该路径移动至门口并清洁时可以对至少部分区域清洁;在维护结束之后,可以不需要返回该房间继续清洁,或者不需要对剩余的部分路径的区域进行清洁。For example, when the cleaning robot performs edge cleaning of a room or cleans the room in an arcuate path, at least part of the path of the cleaning robot is a path moving toward the doorway of the room. When the first maintenance instruction is obtained, the cleaning robot is moving along the at least part of the path toward the door of the room, that is, the type of task that the cleaning robot is not performing is moving along the at least part of the path toward the door of the room, then You can continue to move at least part of the distance along the at least part of the path toward the door of the room (reach the door or arrive near the door) and clean the area corresponding to the at least part of the path, and then generate the second maintenance instruction to control the cleaning Robots perform maintenance. For example, when the first maintenance instruction is obtained, only the area on the path moving to the door of the room is not cleaned. When moving to the door along the path and cleaning, at least part of the area may be cleaned; after the maintenance is completed, the area may not be cleaned. Either the room needs to be returned to continue cleaning, or the remaining part of the path does not need to be cleaned.
举例而言,当获取到所述第一维护指令时,所述清洁机器人正在沿所述至少部分路径向房间的门口移动,即清洁机器人已执行任务的类型为沿所述至少部分路径向房间的门口移动,未执行任务的类型为沿所述至少部分路径向房间的门口移动,则可以继续沿所述至少部分路径向房间的门口移动和清洁,直至所述清洁机器人完成的工作量达到所述第二工作量阈值,或者直至所述清洁机器人移动和清洁到所述房间的门口时,生成所述第二维护指令以控制所述清洁机器人进行维护。For example, when the first maintenance instruction is obtained, the cleaning robot is moving along the at least part of the path toward the door of the room, that is, the type of task the cleaning robot has performed is moving toward the room along the at least part of the path. If the type of the unexecuted task is to move to the door of the room along the at least part of the path, you can continue to move and clean along the at least part of the path to the door of the room until the workload completed by the cleaning robot reaches the At a second workload threshold, or until the cleaning robot moves and cleans to the doorway of the room, the second maintenance instruction is generated to control the cleaning robot to perform maintenance.
举例而言,当获取到所述第一维护指令时,所述清洁机器人正在沿所述至少部分路径向房间的门口移动,且所述未执行任务的路径包括向房间的门口移动的路径和远离房间的门口的路径,即清洁机器人已执行任务的类型为沿所述至少部分路径向房间的门口移动,清洁机器人未执行任务的类型为沿所述至少部分路径向房间的门口移动,可以控制清洁机器人向门口移动,而不控制清洁机器人远离房间的门口,以降低清洁机器人在门口与房间内部之间的折返次数,提高清洁效率。For example, when the first maintenance instruction is obtained, the cleaning robot is moving toward the doorway of the room along the at least part of the path, and the path where the task is not performed includes a path moving toward the doorway of the room and away from the doorway. The path to the door of the room, that is, the type of task the cleaning robot has performed is to move toward the door of the room along at least part of the path, and the type of task that the cleaning robot has not performed is to move to the door of the room along the at least part of the path, and cleaning can be controlled. The robot moves toward the door instead of controlling the cleaning robot to move away from the door of the room, so as to reduce the number of turns of the cleaning robot between the door and the interior of the room and improve cleaning efficiency.
示例性的,所述根据所述任务执行状态,控制所述清洁机器人进行维护,包括:当所述未执行任务的类型包括所述清洁机器人沿障碍物的边缘进行清洁时,控制所述清洁机器人完成沿所述障碍物的边缘进行清洁后进行维护。在维护结束之后,清洁机器人无需再次返回该障碍物,可以节省路径消耗,提高清洁效率。Exemplarily, controlling the cleaning robot to perform maintenance according to the task execution status includes: when the type of the unexecuted task includes the cleaning robot cleaning along the edge of an obstacle, controlling the cleaning robot Perform maintenance after completing cleaning along the edges of said obstructions. After the maintenance is completed, the cleaning robot does not need to return to the obstacle again, which can save path consumption and improve cleaning efficiency.
举例而言,当所述未执行任务的类型为所述清洁机器人沿障碍物的边缘进行清洁,且所述的已执行任务为沿所述障碍物的部分边缘时,控制所述清洁机器人清洁完所述障碍物的边缘后进行维护。当所述未执行任务的类型为所述清洁机器人沿障碍物的边缘进行清洁,且所述清洁机器人还未开始对所述障碍物的边缘进行清洁时,控制所述清洁机器人在开始沿所述障碍物的边缘进行清洁前进行维护,即可以直接控制清洁机器人进行维护,以及在维护后继续执行所述未执行任务。For example, when the type of the unexecuted task is that the cleaning robot cleans along the edge of the obstacle, and the executed task is along part of the edge of the obstacle, the cleaning robot is controlled to finish cleaning. The barrier is maintained after the edge. When the type of the unexecuted task is that the cleaning robot cleans along the edge of the obstacle, and the cleaning robot has not yet started cleaning the edge of the obstacle, the cleaning robot is controlled to start cleaning along the edge of the obstacle. The edge of the obstacle is maintained before cleaning, that is, the cleaning robot can be directly controlled to perform maintenance, and continue to perform the unexecuted tasks after maintenance.
可选的,所述方法还包括:在根据所述任务执行状态,确定要控制所述清洁机器人进 行维护时,输出提示信息,所述提示信息用于提示用户所述清洁机器人准备进行维护。例如在生成所述第二维护指令时输出所述提示信息。例如通过清洁机器人、基站或用户终端的交互单元输出所述提示信息。Optionally, the method further includes: when it is determined that the cleaning robot is to be controlled to perform maintenance according to the task execution status, outputting prompt information, the prompt information being used to prompt the user that the cleaning robot is ready for maintenance. For example, the prompt information is output when the second maintenance instruction is generated. For example, the prompt information is output through an interactive unit of a cleaning robot, a base station or a user terminal.
本申请实施例提供的清洁机器人的控制方法,包括:获取第一维护指令;响应于所述第一维护指令,确定所述清洁机器人的任务执行状态;以及根据所述任务执行状态,控制所述清洁机器人进行维护。通过根据所述清洁机器人的任务执行状态,以对应的控制策略控制所述清洁机器人进行维护,可以使得清洁机器人的维护时机有一定的宽松调节范围,以减少清洁机器人维护对清洁效率的影响。The control method of a cleaning robot provided by embodiments of the present application includes: obtaining a first maintenance instruction; in response to the first maintenance instruction, determining the task execution status of the cleaning robot; and controlling the cleaning robot according to the task execution status. Cleaning robot for maintenance. By controlling the cleaning robot to perform maintenance according to the task execution status of the cleaning robot with a corresponding control strategy, the maintenance timing of the cleaning robot can have a certain loose adjustment range to reduce the impact of cleaning robot maintenance on cleaning efficiency.
在一些实施方式中,请参阅图11,清洁机器人的控制方法包括:In some implementations, please refer to Figure 11, the control method of the cleaning robot includes:
在所述清洁机器人对预设清洁区域进行清洁时,清洁机器人完成的工作量的量值达到第一工作量阈值时,生成所述第一维护指令;When the cleaning robot cleans the preset cleaning area and the amount of work completed by the cleaning robot reaches the first workload threshold, the first maintenance instruction is generated;
响应于所述第一维护指令,确定所述清洁机器人的任务执行状态;In response to the first maintenance instruction, determine the task execution status of the cleaning robot;
如果正在对房间进行沿边清洁或者以弓形路径对所述房间进行清洁,且确定未执行任务的工作量小于或等于预设工作量时,控制所述清洁机器人完成所述未执行任务,以及在完成所述未执行任务之后生成第二维护指令;当未执行任务的工作量大于预设工作量,且未执行任务包括清洁机器人向房间的门口移动时,控制清洁机器人向门口移动,以及当工作量达到第二工作量阈值或者移动到门口时生成第二维护指令;If the room is being cleaned along the edge or in an arcuate path, and it is determined that the workload of the unexecuted tasks is less than or equal to the preset workload, the cleaning robot is controlled to complete the unexecuted tasks, and after completing The second maintenance instruction is generated after the unexecuted tasks; when the workload of the unexecuted tasks is greater than the preset workload, and the unexecuted tasks include the cleaning robot moving to the door of the room, the cleaning robot is controlled to move to the door, and when the workload Generate a second maintenance instruction when reaching the second workload threshold or moving to the door;
如果正在对障碍物进行沿边清洁,即清洁机器人沿障碍物的边缘进行清洁时,控制所述清洁机器人完成沿所述障碍物的边缘进行清洁后生成第二维护指令;If the obstacle is being cleaned along the edge, that is, when the cleaning robot is cleaning along the edge of the obstacle, control the cleaning robot to generate a second maintenance instruction after completing cleaning along the edge of the obstacle;
根据第二维护指令控制所述清洁机器人进行维护。The cleaning robot is controlled to perform maintenance according to the second maintenance instruction.
可选的,在清洁机器人已完成的工作量的量值达到所述第二工作量阈值时,强制控制所述清洁机器人进行维护,例如可以保证清洁机器人可以返回至基站进行维护。Optionally, when the amount of work completed by the cleaning robot reaches the second workload threshold, the cleaning robot is forcibly controlled to perform maintenance. For example, it can ensure that the cleaning robot can return to the base station for maintenance.
在本申请另一些实施例中,清洁机器人的控制方法,包括:在所述清洁机器人对预设清洁区域进行清洁时,获取所述清洁机器人完成的工作量;当所述清洁机器人完成的工作量的量值达到第一工作量阈值时,控制所述清洁机器人进行维护。In other embodiments of the present application, the control method of a cleaning robot includes: when the cleaning robot cleans a preset cleaning area, obtaining the workload completed by the cleaning robot; when the workload completed by the cleaning robot When the magnitude reaches the first workload threshold, the cleaning robot is controlled to perform maintenance.
可以理解的,在所述清洁机器人完成的工作量的量值达到第一工作量阈值时,也可以不需要确定所述清洁机器人的任务执行状态。It can be understood that when the magnitude of the workload completed by the cleaning robot reaches the first workload threshold, it is not necessary to determine the task execution status of the cleaning robot.
举例而言,现有的清洁机器人通常按照固定的清洁面积控制清洁机器人返回基站进行维护。但是不同区域的脏污程度是不同的,如果设定的清洁面积较大,遇到较脏的区域时,清洁机器人的清洁能力无法较好的完成清洁,清洁效果会大受影响;而如果设定的面积较小,则遇到不是很脏的地面时,会在清洁机器人还有较多清洁能力的情况下返回基站进行维护,清洁效率会收到影响。即按照固定的清洁面积规划清洁机器人返回基站维护,无法兼顾清洁效果和清洁效率。本申请实施例可以通过获取所述清洁机器人完成的工作量,以及当所述清洁机器人完成的工作量的量值达到第一工作量阈值时,控制所述清洁机器人进行维护,可以兼顾清洁效果和清洁效率。For example, existing cleaning robots usually control the cleaning robot to return to the base station for maintenance according to a fixed cleaning area. However, the degree of dirt in different areas is different. If the cleaning area is set to be large, the cleaning ability of the cleaning robot will not be able to complete the cleaning well when encountering a dirty area, and the cleaning effect will be greatly affected; If the designated area is small, when the floor is not very dirty, the cleaning robot will return to the base station for maintenance when it still has more cleaning capabilities, and the cleaning efficiency will be affected. That is, the cleaning robot returns to the base station for maintenance according to a fixed cleaning area plan, which cannot take into account both cleaning effect and cleaning efficiency. Embodiments of the present application can obtain both the cleaning effect and the performance of the cleaning robot by obtaining the workload completed by the cleaning robot, and controlling the cleaning robot to perform maintenance when the magnitude of the workload completed by the cleaning robot reaches the first workload threshold. Cleaning efficiency.
可选的,所述工作量包括以下至少一种:所述清洁机器人的拖擦件拖擦地面时吸附的脏污量、所述清洁机器人清洁地面时的耗电量、所述清洁机器人清洁地面时的耗水量、所述清洁机器人清洁地面时的脏污收集量、所述清洁机器人清洁地面时的污水收集量。Optionally, the workload includes at least one of the following: the amount of dirt absorbed by the cleaning robot's mopping part when mopping the floor, the power consumption of the cleaning robot when cleaning the floor, the amount of time the cleaning robot cleans the floor. The amount of water consumed when the cleaning robot cleans the floor, the amount of dirt collected when the cleaning robot cleans the floor, and the amount of sewage collected when the cleaning robot cleans the floor.
在一些实施方式中,所述获取所述清洁机器人完成的工作量,包括:获取预设清洁区域所在房间的图形学特征和/或所述房间的房间标识,根据所述图形学特征和/或所述房间的房间标识确定所述清洁机器人完成的工作量。示例性的,根据所述图形学特征和/或所述房间的房间标识,确定所述房间中各单位区域的工作量,以及根据所述清洁机器人清洁过的单位区域的工作量,确定所述清洁机器人完成的工作量。其中,确定单位区域的工作量的步骤可以参照前述实施例的说明,此处不再赘述。In some embodiments, obtaining the workload completed by the cleaning robot includes: obtaining the graphical characteristics of the room where the preset cleaning area is located and/or the room identification of the room. According to the graphical characteristics and/or The room identification of the room determines the amount of work performed by the cleaning robot. Exemplarily, the workload of each unit area in the room is determined based on the graphical features and/or the room identification of the room, and the workload of the unit area cleaned by the cleaning robot is determined. The amount of work done by the cleaning robot. For the step of determining the workload of the unit area, reference may be made to the description of the foregoing embodiments and will not be described again here.
在一些实施方式中,所述预设清洁区域根据房间中各单位区域的工作量划分得到。示 例性的,可以根据一个或多个房间中各单位区域的工作量,将所述一个或多个房间划分为一个或多个预设清洁区域。In some embodiments, the preset cleaning areas are divided according to the workload of each unit area in the room. For example, one or more rooms can be divided into one or more preset cleaning areas according to the workload of each unit area in the room or rooms.
示例性的,获取工作量值域范围;根据所述工作量值域范围和房间中各单位区域的工作量,确定所述房间的分割线,以使所述分割线和所述房间的边界形成至少两个预设清洁区域,各所述预设清洁区域的工作量的量值均小于或等于所述工作量值域范围的上限值,且大于或等于所述工作量值域范围中的下限值;或者仅有一个所述预设清洁区域的工作量的量值小于所述下限值,且工作量的量值小于所述下限值的所述预设清洁区域的清洁顺序在其他所述预设清洁区域之后。以便清洁机器人在每完成一个预设清洁区域的工作量之后中断当前清洁任务;可以使得清洁机器人在根据所述预设清洁区域对房间进行清洁时可以起到较好的清洁效果和较高的清洁效率。Exemplarily, obtain the workload value domain range; determine the dividing line of the room based on the workload value domain range and the workload of each unit area in the room, so that the dividing line and the boundary of the room form There are at least two preset cleaning areas, and the magnitude of the workload of each preset cleaning area is less than or equal to the upper limit of the workload value range, and greater than or equal to the upper limit of the workload value range. The lower limit value; or there is only one preset cleaning area whose workload value is less than the lower limit value, and the cleaning sequence of the preset cleaning area whose workload value is less than the lower limit value is in After the other preset cleaning areas. So that the cleaning robot can interrupt the current cleaning task after completing the workload of a preset cleaning area; it can make the cleaning robot achieve better cleaning effect and higher cleaning efficiency when cleaning the room according to the preset cleaning area. efficiency.
其中,所述工作量值域范围的上限值可以作为所述第一工作量阈值。The upper limit of the workload value range may be used as the first workload threshold.
可选的,当所述清洁机器人完成的工作量的量值达到所述第一工作量阈值时,确定所述清洁机器人的任务执行状态;以及根据所述任务执行状态,控制所述清洁机器人进行维护。具体可以图9所示的清洁机器人的控制方法的说明,此处不再赘述。Optionally, when the amount of work completed by the cleaning robot reaches the first workload threshold, the task execution status of the cleaning robot is determined; and based on the task execution status, the cleaning robot is controlled to perform maintain. Specifically, the control method of the cleaning robot shown in Figure 9 can be described, which will not be described again here.
在一些实施方式中,所述方法还包括:根据多个预设清洁区域中各单位区域的工作量,确定所述多个预设清洁区域的清洁顺序。可选的,可以先清洁单位区域的工作量之和较大的预设清洁区域,在清洁干净较脏的预设清洁区域之后再清洁较干净的预设清洁区域,可以优先清洁较脏的区域,较快的起到明显的清洁效果。可选的,也可以先清洁单位区域的工作量之和较小的预设清洁区域,然后再清洁单位区域的工作量之和较大的预设清洁区域,可以较快的完成一次对全部预设清洁区域的覆盖清洁。举例而言,可以根据清洁机器人的清洁模式(如拖地模式)确定先清洁单位区域的工作量之和较大的预设清洁区域,还是先清洁单位区域的工作量之和较小的预设清洁区域。例如在清洁模式的清洁要求越高(如深度清洁模式)的情况下,先清洁单位区域的工作量之和较大的预设清洁区域;在清洁模式的清洁要求越低(如快速清洁模式)的情况下,先清洁单位区域的工作量之和较小的预设清洁区域。In some embodiments, the method further includes: determining the cleaning order of the plurality of preset cleaning areas based on the workload of each unit area in the plurality of preset cleaning areas. Optionally, you can clean the preset cleaning area with the larger workload per unit area first, and then clean the cleaner preset cleaning area after cleaning the dirtier preset cleaning area. You can clean the dirtier area first. , and achieve obvious cleaning effect quickly. Optionally, you can also clean the preset cleaning area with a smaller workload sum per unit area first, and then clean the preset cleaning area with a larger workload sum per unit area, which can quickly complete all preset cleaning areas at once. Provide coverage and cleaning of clean areas. For example, it can be determined based on the cleaning mode of the cleaning robot (such as the mopping mode) whether to clean a preset cleaning area with a larger sum of workload per unit area first or a preset cleaning area with a smaller sum of workload per unit area. Clean area. For example, when the cleaning requirements of the cleaning mode are higher (such as deep cleaning mode), the preset cleaning area with the larger workload sum per unit area is cleaned first; when the cleaning requirements of the cleaning mode are lower (such as quick cleaning mode) In this case, first clean the preset cleaning area where the sum of the workload per unit area is smaller.
在一些实施方式中,所述方法还包括:根据所述预设清洁区域中各单位区域的工作量,确定清洁所述预设清洁区域时的清洁路径。可选的,所述清洁路径优先覆盖工作量较大的单位区域,以较快的起到明显的清洁效果;或者也可以优先覆盖工作量较小的单位区域,以降低吸附较多脏污的拖擦件降低清洁效果。可选的,也可以根据清洁模式确定清洁路径优先覆盖工作量较大的单位区域,或者清洁路径优先覆盖工作量较小的单位区域。例如深度清洁模式时清洁路径优先覆盖工作量较大的单位区域,当然也不限于此。In some embodiments, the method further includes: determining a cleaning path when cleaning the preset cleaning area based on the workload of each unit area in the preset cleaning area. Optionally, the cleaning path may preferentially cover unit areas with a larger workload to achieve an obvious cleaning effect faster; or it may also preferentially cover unit areas with a smaller workload to reduce the risk of adsorbing more dirt. Mopping elements reduce cleaning effectiveness. Optionally, it can also be determined according to the cleaning mode that the cleaning path preferentially covers the unit area with a large workload, or the cleaning path preferentially covers the unit area with a small workload. For example, in the deep cleaning mode, the cleaning path preferentially covers the unit area with a large workload, but of course it is not limited to this.
清洁机器人可用于对地面进行自动清洁,应用场景可以为家庭室内清洁、大型场所清洁等。为减少碰撞对清洁机器人的损伤,通常会在清洁机器人沿着房间墙壁或障碍物进行清洁的时候,控制清洁机器人的机体和墙壁或障碍物保持预定的距离,此外,因为清洁机器人机体和清洁机构的结构设计局限,在沿房间墙壁或障碍物区域进行清洁时,清洁机器人与房间墙壁或障碍物之间存在清洁结构清洁不到的区域,即清洁机器人在保持预定的距离沿房间墙壁或障碍物区域进行清洁时,存在超出清洁结构的清洁极限范围的区域,这些区域长期得不到有效清洁会变得很脏,整体清洁效果受到影响,不符合用户期待,影响用户体验;为了保证此类区域的清洁,现有的一些清洁机器人通常需要消耗更多的时间去尝试对此类清洁区域的清洁,但是用户对此类区域的脏污程度的敏感度较之空旷区域的脏污程度的敏感度小,清洁机器人对此类区域进行清洁要消耗大量时间,对其进行清洁的效率不高,影响清洁机器人整体的清洁效率,仍然难以符合用户的期待,影响用户体验,现有清洁机器人无法兼顾清洁效果和清洁效率,仍不够智能。Cleaning robots can be used to automatically clean floors, and their application scenarios can include household indoor cleaning, large-scale place cleaning, etc. In order to reduce damage to the cleaning robot due to collisions, when the cleaning robot cleans along the walls or obstacles of the room, the body of the cleaning robot is usually controlled to maintain a predetermined distance from the wall or obstacle. In addition, because the body of the cleaning robot and the cleaning mechanism Structural design limitations. When cleaning along room walls or obstacle areas, there is an area between the cleaning robot and the room wall or obstacle that cannot be cleaned by the cleaning structure. That is, the cleaning robot maintains a predetermined distance along the room wall or obstacle. When cleaning areas, there are areas that exceed the cleaning limit of the cleaning structure. These areas will become very dirty if they are not effectively cleaned for a long time, and the overall cleaning effect will be affected, which will not meet user expectations and affect the user experience; in order to ensure that such areas Some existing cleaning robots usually need to spend more time trying to clean such cleaning areas, but users are more sensitive to the degree of dirt in such areas than in open areas. Small, cleaning robots consume a lot of time to clean such areas, and the efficiency of cleaning them is not high, which affects the overall cleaning efficiency of the cleaning robot. It is still difficult to meet user expectations and affects the user experience. Existing cleaning robots cannot take care of both cleaning. The effect and cleaning efficiency are still not smart enough.
请参阅图12,图12是本申请实施例提供的一种清洁机器人的控制方法的流程示意图。所述清洁机器人的控制方法可以应用在清洁系统中,用于对系统中的清洁机器人进行控制,以使清洁机器人执行清洁任务,对清洁任务地图对应的区域进行清洁等过程。Please refer to FIG. 12 , which is a schematic flowchart of a control method for a cleaning robot provided by an embodiment of the present application. The control method of the cleaning robot can be applied in a cleaning system to control the cleaning robot in the system so that the cleaning robot performs cleaning tasks and cleans the area corresponding to the cleaning task map.
清洁任务地图对应的区域可以为家庭空间、家庭空间的一个房间单元、一个房间单元的部分区域、大型场所或者大型场所的部分区域等任一个待清洁的区域。从另一角度看,清洁任务地图对应的区域可以指首次清洁的较大区域,例如整个房间单元;也可以指对较大区域进行首次清洁后需要进行补漏扫的区域,例如房间单元内的靠墙区域,或者障碍物区域。The area corresponding to the cleaning task map can be any area to be cleaned such as a family space, a room unit of a family space, a partial area of a room unit, a large place, or a part of a large place. From another perspective, the area corresponding to the cleaning task map can refer to the larger area that is cleaned for the first time, such as the entire room unit; it can also refer to the area that needs to be cleaned after the first cleaning of the larger area, such as the backrest in the room unit. Wall area, or obstacle area.
如图2所示,清洁系统包括一个或多个清洁机器人100,以及一个或多个基站200。基站200用于和清洁机器人100配合使用,例如,基站200可以向清洁机器人100进行充电、基站200可以向清洁机器人100提供停靠位置等。基站200还可以对清洁机器人100的拖擦件110的进行清洁,其中,拖擦件110用于对地面进行拖擦。As shown in FIG. 2 , the cleaning system includes one or
清洁系统还包括控制装置300,控制装置300可以用于实现本申请实施例的清洁机器人的控制方法的步骤。可选地,清洁机器人100的机器人控制器和/或基站200的基站控制器可以单独或者配合作为控制装置300,用于实现本申请实施例的清洁机器人的控制方法的步骤;在另一些实施方式中,清洁系统包括单独的控制装置300,用于实现本申请实施例的清洁机器人的控制方法的步骤,该控制装置300可以设置在清洁机器人100上,或者可以设置在基站200上;当然也不限于此,例如控制装置300可以为除清洁机器人100和基站200之外的装置,如家庭智能终端、总控设备等。The cleaning system also includes a
在一些实施方式中,清洁机器人100包括机器人主体、驱动电机、传感器单元、机器人控制器、电池、行走单元、机器人存储器、机器人通信单元、机器人交互单元、拖擦件110、和充电部件等。In some embodiments, the cleaning
如图13所示,拖擦件110用于对地面进行拖擦,拖擦件110的数量可以为一个或多个。拖擦件110例如为拖布。拖擦件110设置在机器人主体的底部,具体为机器人主体的底部靠前的位置。在机器人主体内部设有驱动电机,在机器人主体的底部伸出两个转轴,拖擦件110套接在转轴上。驱动电机可带动转轴旋转,从而转轴带动拖擦件110旋转。As shown in FIG. 13 , the mopping
在一些实施方式中,如图13所示,清洁机器人100还包括刷扫件120,刷扫件120包括边刷件121和/或中扫件122。清洁机器人100为扫拖一体的清洁机器人,刷扫件120和拖擦件110可以一起工作,例如刷扫件120和拖擦件110同时工作,刷扫件120和拖擦件110持续交替工作等;当然,该刷扫件120和拖擦件110也可以分开工作,即刷扫件120单独进行清扫工作,或者,拖擦件110单独进拖擦工作。In some embodiments, as shown in FIG. 13 , the cleaning
清洁机器人在使用刷扫件120针对地面进行扫地时,边刷件121在外侧将灰尘等脏污扫到中间区域,中扫件122又继续将中间区域的脏污清扫至吸尘装置。其中,边刷件121的数目不做限定,如图13中清洁机器人100在左右两侧布局有两个边刷件121,可选的,仅在左侧或右侧布局一个边刷件121。When the cleaning robot uses the brushing
一般来说,可将刷扫件120设置于拖擦件110的前侧,从而,在刷扫件120和拖擦件110一起工作时,清洁机器人100可以进行前扫后拖,相比刷扫件120设置于拖擦件110的后面,可以避免刷扫件120被拖擦件110拖过的湿区域打湿,也避免染了脏污的刷扫件120弄脏前面的已拖地区域。Generally speaking, the brushing and
行走单元为与清洁机器人100的移动相关的部件,用于驱动清洁机器人100运动,以使拖擦件110和/或刷扫件120对地面进行拖擦。The walking unit is a component related to the movement of the
机器人控制器设置在机器人主体内部,机器人控制器用于控制清洁机器人100执行具体的操作。该机器人控制器例如可以为中央处理器(Central Processing Unit,CPU)、或微处理器(Microprocessor)等。示例性的,机器人控制器与电池、机器人存储器、驱动电机、行走单元、传感器单元、以及机器人交互单元等部件电连接,以对这些部件进行控制。The robot controller is arranged inside the robot body, and is used to control the cleaning
电池设置在机器人主体内部,电池用于为清洁机器人100提供电力。机器人主体上还设有充电部件,该充电部件用于从外部设备获取电力,从而向清洁机器人100的电池进行充电。The battery is provided inside the robot body, and the battery is used to provide power to the
机器人存储器设置在机器人主体上,机器人存储器上存储有程序,该程序被机器人控 制器执行时实现相应的操作。机器人通信单元设置在机器人主体上,机器人通信单元用于让清洁机器人100和外部设备进行通信,清洁机器人100可以通过机器人通信单元,与终端进行通信,和/或与基站200进行通信。其中,基站200为配合清洁机器人100使用的清洁设备。The robot memory is set on the robot body, and the robot memory stores programs. When the program is executed by the robot controller, the corresponding operations are implemented. The robot communication unit is provided on the robot body. The robot communication unit is used to allow the
在机器人主体上设置的传感器单元包括各种类型的传感器,例如激光雷达、碰撞传感器、距离传感器、跌落传感器、计数器、和陀螺仪等。激光雷达设置在机器人主体的顶部,在工作时,可得到周围的环境信息,例如障碍物相对激光雷达的距离和角度等。此外,也可用摄像头替代激光雷达,通过对摄像头拍摄的图像中的障碍物进行分析,也可得到障碍物相对摄像头的距离、角度等。碰撞传感器包括碰撞壳体和触发传感器。当清洁机器人100通过碰撞壳体与障碍物碰撞时,碰撞壳体向清洁机器人100内部移动,且压缩弹性缓冲件。在碰撞壳体向清洁机器人100内部移动一定距离后,碰撞壳体与触发传感器接触,触发传感器被触发产生信号,该信号可发送到机器人主体内的机器人控制器,以进行处理。在碰完障碍物后,清洁机器人100远离障碍物,在弹性缓冲件的作用下,碰撞壳体移回原位。可见,碰撞传感器可对障碍物进行检测,以及当碰撞到障碍物后,起到缓冲作用。距离传感器具体可以为红外探测传感器,可用于探测障碍物至距离传感器的距离。距离传感器设置在机器人主体的侧面,从而通过距离传感器可测出位于清洁机器人100侧面附近的障碍物至距离传感器的距离值。距离传感器也可以是超声波测距传感器、激光测距传感器或者深度传感器等。跌落传感器设置在机器人主体的底部边缘,当清洁机器人100移动到地面的边缘位置时,通过跌落传感器可探测出清洁机器人100有从高处跌落的风险,从而执行相应的防跌落反应,例如清洁机器人100停止移动、或往远离跌落位置的方向移动等。在机器人主体的内部还设有计数器和陀螺仪。计数器用于检测清洁机器人100移动的距离长度。陀螺仪用于检测清洁机器人100转动的角度,从而可确定出清洁机器人100的朝向。The sensor unit provided on the robot body includes various types of sensors, such as lidar, collision sensor, distance sensor, drop sensor, counter, and gyroscope. The lidar is set on the top of the robot body. When working, the surrounding environment information can be obtained, such as the distance and angle of obstacles relative to the lidar, etc. In addition, cameras can also be used instead of lidar. By analyzing the obstacles in the images captured by the cameras, the distance and angle of the obstacles relative to the camera can also be obtained. The crash sensor includes a crash housing and a trigger sensor. When the cleaning
机器人交互单元设置在机器人主体上,用户可通过机器人交互单元和清洁机器人100进行交互。机器人交互单元例如包括开关按钮、扬声器、麦克风、触控开关/屏幕等部件。用户可通过按压开关按钮或触控开关/屏幕,控制清洁机器人100启动工作或停止工作,还可以通过触控屏幕显示清洁机器人的工作状态信息。清洁机器人100可通过扬声器向用户播放提示音,通过麦克风获取用户的控制指令,或通过获取用户的语音对用户所在地点进行定位。The robot interaction unit is provided on the robot body, and the user can interact with the cleaning
应该理解,本申请实施例描述的清洁机器人100只是一个具体示例,并不对本申请实施例的清洁机器人100构成具体限定,本申请实施例的清洁机器人100还可以为其它的具体实现方式。例如,在其它的实现方式中,清洁机器人可以比图1所示的清洁机器人100有更多或更少的部件。It should be understood that the cleaning
如图12所示,本申请一实施例的清洁机器人的控制方法包括步骤S410至步骤S420。As shown in FIG. 12 , the control method of a cleaning robot according to an embodiment of the present application includes steps S410 to S420.
S410、获取边界补漏清洁任务的一个或至少两个预设频率。S410. Obtain one or at least two preset frequencies for the boundary leakage cleaning task.
S420、根据所述预设频率,控制所述清洁机器人对所述预设清洁区域执行边界补漏清洁任务。S420. According to the preset frequency, control the cleaning robot to perform a boundary leak-filling cleaning task on the preset cleaning area.
在一些实施方式中,在控制所述清洁机器人对预设清洁区域进行清洁时,获取边界补漏清洁任务的一个或至少两个预设频率,以及根据所述预设频率,控制所述清洁机器人对所述预设清洁区域执行边界补漏清洁任务。In some embodiments, when controlling the cleaning robot to clean the preset cleaning area, one or at least two preset frequencies of the boundary leak cleaning task are obtained, and based on the preset frequencies, the cleaning robot is controlled to clean the preset cleaning area. The preset cleaning area performs boundary leakage cleaning tasks.
示例性的,所述预设清洁区域包括房间边界和/或障碍物的轮廓,其中房间边界例如包括墙壁、台阶、门槛等,障碍物例如包括柜子、床、沙发、桌子、椅子等,当然也不限于此,例如与墙壁、台阶、门槛等相连的障碍物轮廓,也可以确定为所述房间边界。示例性的,清洁机器人执行边界补漏清洁任务时可以对房间的边界进行边界清洁补漏,还可以对障碍物的轮廓边界进行边界清洁补漏。其中,障碍物的轮廓可以为障碍物正投影的轮廓(如沙发、床的正投影的轮廓),也可以为清洁机器人围绕障碍物运动时清洁机器人能够触碰到的障碍物 的实际轮廓(如桌子腿、椅子腿的轮廓)。Exemplarily, the preset cleaning area includes room boundaries and/or outlines of obstacles, where room boundaries include, for example, walls, steps, thresholds, etc., and obstacles include, for example, cabinets, beds, sofas, tables, chairs, etc., and of course, It is not limited to this. For example, the outline of obstacles connected with walls, steps, thresholds, etc. can also be determined as the room boundary. For example, when the cleaning robot performs the boundary cleaning task, it can perform boundary cleaning and leaking on the boundaries of the room, and can also perform boundary cleaning and leaking on the contour boundaries of obstacles. Among them, the outline of the obstacle can be the outline of the orthographic projection of the obstacle (such as the outline of the orthographic projection of a sofa or bed), or it can be the actual outline of the obstacle that the cleaning robot can touch when the cleaning robot moves around the obstacle (such as the outline of the orthographic projection of the obstacle). outlines of table legs, chair legs).
示例性的,所述根据所述预设频率,控制所述清洁机器人执行边界补漏清洁任务,包括:根据所述预设频率,控制所述清洁机器人沿所述房间边界和/或所述障碍物的轮廓进行沿边清洁运动时,执行补漏清洁动作,其中,补漏清洁动作包括以下至少一种:改变角速度而进行旋转、改变角速度和线速度而进行转弯、改变线速度而进行前进或后退运动;沿边清洁运动为与房间的边界或障碍物的轮廓保持预定距离一边行进一边对预设清洁区域进行清洁。Exemplarily, controlling the cleaning robot to perform a boundary leak-filling cleaning task according to the preset frequency includes: controlling the cleaning robot to move along the room boundary and/or the obstacle according to the preset frequency. When the contour of the contour performs edge cleaning motion, a leak-filling cleaning action is performed, wherein the leak-filling cleaning action includes at least one of the following: changing the angular velocity to rotate, changing the angular velocity and linear velocity to make a turn, changing the linear velocity to move forward or backward; The cleaning movement maintains a predetermined distance from the boundary of the room or the outline of the obstacle while cleaning the preset cleaning area.
由于受到刷扫件、拖擦件等清洁件的大小及安装位置的限制,或者受到相邻清洁件之间存在安装间隙等因素的影响,清洁机器人在对房间边界,如靠近墙壁的区域进行清洁时,拖擦件的覆盖区域受限,易出现漏清洁的问题。请参阅图14,图14是清洁机器人通过拖擦件110对预设清洁区域进行沿边清洁运动的示意图,例如沿着预设清洁区域中的房间边界或者障碍物轮廓进行清洁;清洁机器人沿着房间边界或者障碍物轮廓行进以及通过拖擦件110等清洁件对房间边界或障碍物轮廓附近的区域进行的清洁时,拖擦件110等清洁件的边缘与房间边界或障碍物轮廓保持预定距离L,此时会因为该预定距离而存在清洁盲区,即清洁件未清洁到的区域。Due to the limitations of the size and installation location of cleaning parts such as brushing parts and mopping parts, or the installation gap between adjacent cleaning parts and other factors, the cleaning robot is cleaning the room boundaries, such as areas close to the wall. At this time, the coverage area of the mop part is limited, and the problem of leakage of cleaning is easy to occur. Please refer to Figure 14. Figure 14 is a schematic diagram of the cleaning robot performing edge cleaning movement on the preset cleaning area through the mopping
图14所示为清洁机器人沿直线拖擦清洁的工作场景下清洁盲区的示意图,在沿直线拖擦清洁的工作场景下清洁机器人沿房间或障碍物的直线边界进行清洁。如图18-13所示,清洁机器人的工作场景不限于包括沿直线拖擦清洁,例如还可以包括以下至少一种:沿内角刷扫清洁、沿内角拖擦清洁、沿外角刷扫清洁、沿外角拖擦清洁、沿柱状体刷扫清洁、沿柱状体拖擦清洁,这些场景中也会产生清洁盲区。Figure 14 shows a schematic diagram of the cleaning blind area in a working scenario in which the cleaning robot drags and cleans along a straight line. In a working scenario in which the cleaning robot drags and cleans in a straight line, the cleaning robot cleans along the straight boundary of the room or obstacle. As shown in Figure 18-13, the working scenario of the cleaning robot is not limited to dragging and cleaning along a straight line. For example, it can also include at least one of the following: brushing and cleaning along the inner corners, dragging and cleaning along the inner corners, brushing and cleaning along the outer corners, and cleaning along the outer corners. Cleaning by mopping at outer corners, brushing along the column, and mopping along the column will also create cleaning blind spots in these scenarios.
本申请实施例可以通过控制清洁机器人执行边界补漏清洁任务,以对至少部分所述清洁盲区进行清洁,以提高预设清洁区域的清洁效果,例如至少可以提高对房间边界和障碍物附近区域的清洁效果。Embodiments of the present application can control the cleaning robot to perform a boundary leak cleaning task to clean at least part of the cleaning blind area to improve the cleaning effect of the preset cleaning area. For example, it can at least improve the cleaning of room boundaries and areas near obstacles. Effect.
如图15所示为一实施方式中清洁机器人执行边界补漏清洁任务的示意图。清洁机器人在沿直线进行沿边清洁运动的过程中,每行进一段距离就顺时针或者逆时针旋转预设的角度或者旋转任意的角度,使得拖擦件110等清洁件的边缘更靠近房间边界或者障碍物轮廓,扩大了拖擦件110的移动轨迹,增大了拖擦件110的覆盖面积,以对至少部分清洁盲区进行清洁,提升对房间边界等区域的清洁效果。Figure 15 shows a schematic diagram of a cleaning robot performing a boundary leak-filling cleaning task in one embodiment. During the edge cleaning movement along a straight line, the cleaning robot rotates a preset angle clockwise or counterclockwise or any angle every time it travels a certain distance, so that the edges of cleaning parts such as the mopping
如图16所示为另一实施方式中清洁机器人执行边界补漏清洁任务的示意图。所述预设清洁区域包括房间边界或障碍物的轮廓,控制所述清洁机器人执行边界补漏清洁任务,包括控制所述清洁机器人对所述预设清洁区域进行弓形清洁运动,且当所述清洁机器人沿直线行进至所述房间边界或所述障碍物的轮廓时,执行转向掉头动作,以使所述清洁机器人的清洁件的覆盖范围覆盖至少部分清洁盲区,所述清洁盲区为所述清洁机器人进行沿边清洁运动时,所述清洁件的覆盖范围的边界线与所述房间边界和/或所述障碍物的轮廓之间的区域。示例性的,可以通过清洁机器人沿直线运动时与房间边界或障碍物的轮廓的距离是否达到距离阈值确定清洁机器人是否已行进至房间边界或障碍物的轮廓,还可以通过确定清洁机器人沿直线运动时是否与房间边界或障碍物发生碰撞确定清洁机器人是否已行进至房间边界或障碍物的轮廓。如图16所示,清洁机器人沿弓形轨迹向房间边界或障碍物轮廓靠近,当行进至与所述房间边界或所述障碍物的轮廓的距离等于距离阈值或与房间边界或障碍物发生碰撞时,逆时针转向掉头,在转向掉头的过程中,拖擦件110等清洁件的边缘更靠近房间边界或者障碍物轮廓,以对至少部分清洁盲区进行清洁;可选的,转向掉头动作不限于逆时针转向掉头,还可以是顺时针转向掉头;举例而言,所述距离阈值可以根据清洁机器人的半径、拖擦件110等清洁件的清洁范围等确定。FIG. 16 is a schematic diagram of a cleaning robot performing a boundary leak-filling cleaning task in another embodiment. The preset cleaning area includes the outline of a room boundary or an obstacle, and controlling the cleaning robot to perform a boundary leak-filling cleaning task includes controlling the cleaning robot to perform an arcuate cleaning movement on the preset cleaning area, and when the cleaning robot When traveling in a straight line to the boundary of the room or the outline of the obstacle, a turning action is performed so that the coverage of the cleaning parts of the cleaning robot covers at least part of the cleaning blind area, where the cleaning blind area is where the cleaning robot performs During edge cleaning movement, the area between the boundary line of the coverage range of the cleaning element and the room boundary and/or the outline of the obstacle. For example, whether the cleaning robot has traveled to the room boundary or the outline of the obstacle can be determined by whether the distance between the cleaning robot and the outline of the room boundary or obstacle reaches a distance threshold when the cleaning robot moves in a straight line. It can also be determined by determining whether the cleaning robot moves in a straight line. Determine whether the cleaning robot has traveled to the outline of the room boundary or obstacle if it collides with the room boundary or obstacle. As shown in Figure 16, the cleaning robot approaches the room boundary or the outline of the obstacle along the arcuate trajectory. When it travels to a distance equal to the distance threshold from the room boundary or the outline of the obstacle, or collides with the room boundary or the obstacle. , turning counterclockwise, during the turning process, the edge of the cleaning member such as the dragging
可选的,对于房间边界的边界补漏清洁任务,可以是在对各个房间进行清洁时,控制清洁机器人先沿房间边界进行沿边清洁运动并执行补漏清洁动作,然后再控制清洁机器人沿 弓形路径进行弓形清洁运动;也可以是对所有房间进行弓形清洁运动后,再沿各个房间的边界进行沿边清洁运动并执行补漏清洁动作;还可以是对房间进行弓形清洁运动时,控制清洁机器人在距离房间边界达到距离阈值或与房间边界发生碰撞时执行弓形运动的转向掉头动作,此时位于机器人尾部的拖擦件可对房间边界附近的至少部分清洁盲区进行拖擦,而可以无需另作沿边清洁运动,当然也不限于此。Optionally, for the boundary leak-filling cleaning task at the room boundary, when cleaning each room, the cleaning robot is controlled to first perform an edge cleaning movement along the room boundary and perform the leak-filling cleaning action, and then the cleaning robot is controlled to arc along an arcuate path. Cleaning motion; it can also be to perform an arcuate cleaning motion for all rooms, and then perform edge cleaning motions along the boundaries of each room and perform leak-proof cleaning actions; it can also be to perform an arcuate cleaning motion for the room, and control the cleaning robot to reach a distance from the room boundary. When the distance reaches the threshold or collides with the room boundary, a bow-shaped turning movement is performed. At this time, the dragging element located at the tail of the robot can drag at least part of the cleaning blind area near the room boundary without the need for additional cleaning movements along the edge. Of course, It's not limited to this either.
示例性的,在所述控制所述清洁机器人对所述预设清洁区域进行弓形清洁运动之前,所述方法还包括:控制所述清洁机器人对所述预设清洁区域进行沿边清洁运动,通过沿边清洁运动可以确定预设清洁区域中的房间边界和/或障碍物的轮廓。举例而言,对于图16所示的在弓形清洁运动中通过转向掉头动作进行边界补漏的情况,可以在房间进行了一遍沿边清洁运动(沿边清洁运动时不做补漏动作)后,在进行弓形清洁运动的时候控制清洁机器人在距离房间边界达到距离阈值或与房间边界发生碰撞时执行转向掉头动作,以对至少部分清洁盲区进行补漏清洁,弓形清洁运动覆盖的区域不扣除已经完成沿边清洁运动覆盖的区域,即清洁机器人沿弓形轨迹行进至与所述房间边界或所述障碍物的轮廓的距离等于距离阈值或清洁机器人与房间边界或障碍物发生碰撞时,逆时针或顺时针转向掉头,可以清洁清洁盲区中的至少部分区域;还可以进行两次弓形清洁运动,且两侧弓形清洁运动的弓形轨迹正交,以保证大部分或全部的漏拖的区域,即清洁盲区都能有一次补漏清洁。Exemplarily, before controlling the cleaning robot to perform an arcuate cleaning movement on the preset cleaning area, the method further includes: controlling the cleaning robot to perform an edge cleaning movement on the preset cleaning area. The cleaning motion may determine room boundaries and/or the outline of obstacles in a preset cleaning zone. For example, as shown in Figure 16, in the case of boundary leakage correction by turning around during the arcuate cleaning movement, you can perform an edge cleaning movement in the room (no leakage filling movement is performed during the edgewise cleaning movement), and then perform arcuate cleaning When moving, the cleaning robot is controlled to perform a U-turn when it reaches the distance threshold from the room boundary or collides with the room boundary, so as to repair and clean at least part of the cleaning blind area. The area covered by the arcuate cleaning movement does not deduct the area covered by the edge cleaning movement. Area, that is, when the cleaning robot travels along the arcuate trajectory until the distance from the outline of the room boundary or the obstacle is equal to the distance threshold or the cleaning robot collides with the room boundary or obstacle, it turns counterclockwise or clockwise and turns around, and it can be cleaned Clean at least part of the blind area; you can also perform two arcuate cleaning movements, and the arcuate trajectories of the arcuate cleaning movements on both sides are orthogonal to ensure that most or all of the leaked mopping areas, that is, the cleaning blind area can be cleaned once .
在一些实施方式中,所述根据所述预设频率控制所述清洁机器人执行边界补漏清洁任务,可以包括每间隔预设时间控制清洁机器人进行一次边界补漏清洁任务,比如每间隔7天进行一次;也可以包括对预设清洁区域,如房间每执行预设次数的清洁任务之后,控制清洁机器人进行一次边界补漏清洁任务,例如某房间已经清洁了7次,则在第8次清洁的时候需要进行边界补漏清洁。当然也不限,例如在房间执行预设次数的清洁任务之后,判断距离上次边界补漏清洁的时间间隔是否大于或等于7天,若是则控制清洁机器人进行一次边界补漏清洁任务,可以防止房间边界长期不清洁造成的脏污积累。In some embodiments, controlling the cleaning robot to perform a boundary leak-filling cleaning task according to the preset frequency may include controlling the cleaning robot to perform a boundary leak-filling cleaning task at a preset time interval, such as once every 7 days; It can also include controlling the cleaning robot to perform a boundary leak cleaning task for a preset cleaning area, such as a room, after performing a preset number of cleaning tasks. For example, a room has been cleaned 7 times, and it needs to be cleaned for the 8th time. Boundary patch cleaning. Of course, it is not limited. For example, after the room performs a preset number of cleaning tasks, it is determined whether the time interval since the last boundary leak cleaning is greater than or equal to 7 days. If so, the cleaning robot is controlled to perform a boundary leak cleaning task, which can prevent room boundaries. Accumulation of dirt caused by long-term uncleaning.
由于边界补漏清洁任务相较于仅进行沿边清洁运动需要较多的时间和电量,而且用户对房间边界或障碍物轮廓的脏污敏感性较弱,不需要每次对预设清洁区域进行清洁时均控制清洁机器人执行边界补漏清洁任务,以提高清洁效率;本申请实施例通过根据预设频率控制清洁机器人执行边界补漏清洁任务,以对所述预设清洁区域进行清洁,降低或消除房间边界或障碍物轮廓附近的脏污,可以兼顾清洁效率和清洁效果,清洁机器人更智能,用户体验更好。举例而言,边界补漏清洁任务的预设频率可以低于仅进行沿边清洁运动的频率。Since the boundary leak cleaning task requires more time and power than just cleaning along the edge, and the user is less sensitive to dirt on the room boundary or obstacle contours, there is no need to clean the preset cleaning area every time. The cleaning robot is controlled to perform the boundary leak cleaning task to improve the cleaning efficiency; the embodiment of the present application controls the cleaning robot to perform the boundary leak cleaning task according to the preset frequency to clean the preset cleaning area, reduce or eliminate room boundaries or Dirt near the outline of obstacles can take into account both cleaning efficiency and cleaning effect. The cleaning robot is more intelligent and the user experience is better. For example, the preset frequency of edge trap cleaning tasks may be lower than the frequency of only edge cleaning movements.
在一些实施方式中,所述方法还包括:获取边界补漏清洁对象的对象类型;所述根据所述预设频率,控制所述清洁机器人对所述预设清洁区域执行边界补漏清洁任务,包括:确定所述边界补漏清洁对象的对象类型对应的预设频率,以及根据所述对象类型对应的预设频率,控制所述清洁机器人对所述预设清洁区域执行边界补漏清洁任务。所述控制所述清洁机器人对所述预设清洁区域执行边界补漏清洁任务,包括控制所述清洁机器人对所述边界补漏清洁对象进行边界补漏清洁,即清洁边界补漏清洁对象附近的至少部分清洁盲区。可以理解地,每一对象类型对应一个预设频率,一所述边界补漏清洁对象对应至少一种对象类型,当一边界补漏清洁对象仅对应一种对象类型时,该边界补漏清洁对象仅对应一个预设频率;当一边界补漏清洁对象对应至少两种对象类型时,该边界补漏清洁对象相应地对应至少两个所述预设频率,可以根据至少两种不同的预设频率对该边界补漏清洁对象进行边界补漏清洁。例如,一张茶几,一对侧边属于一种对象类型,另一对侧边属于另一种对象类型,则清洁机器人可以分别根据不同的频率分别对两对侧边进行边界补漏清洁。通过根据边界补漏清洁对象的对象类型确定对应的预设频率,可以兼顾清洁机器人的清洁效率和对预设清洁区域的清洁效果。In some embodiments, the method further includes: obtaining the object type of the boundary leak cleaning object; and controlling the cleaning robot to perform a boundary leak cleaning task on the preset cleaning area according to the preset frequency, including: Determine a preset frequency corresponding to the object type of the boundary leak cleaning object, and control the cleaning robot to perform a boundary leak cleaning task on the preset cleaning area according to the preset frequency corresponding to the object type. Controlling the cleaning robot to perform a boundary leak cleaning task on the preset cleaning area includes controlling the cleaning robot to perform boundary leak cleaning on the boundary leak cleaning object, that is, cleaning at least part of the cleaning blind area near the boundary leak cleaning object. . It can be understood that each object type corresponds to a preset frequency, and a boundary leak cleaning object corresponds to at least one object type. When a boundary leak cleaning object only corresponds to one object type, the boundary leak cleaning object only corresponds to one Preset frequency; when a boundary leak cleaning object corresponds to at least two object types, the boundary leak cleaning object corresponds to at least two preset frequencies, and the boundary leak cleaning object can be cleaned according to at least two different preset frequencies. Objects undergo boundary trap cleaning. For example, if a coffee table has one pair of sides that belong to one object type and the other pair of sides that belongs to another object type, the cleaning robot can perform border leak repair cleaning on the two pairs of sides respectively according to different frequencies. By determining the corresponding preset frequency according to the object type of the boundary leak cleaning object, both the cleaning efficiency of the cleaning robot and the cleaning effect of the preset cleaning area can be taken into consideration.
示例性的,所述预设频率包括第一预设频率和第二预设频率,所述对象类型包括悬空障碍物和非悬空障碍物。Exemplarily, the preset frequency includes a first preset frequency and a second preset frequency, and the object types include suspended obstacles and non-suspended obstacles.
其中,悬空障碍物为雷达不可见(雷达观测不到),但可以触发雷达上的碰撞传感器的输出信号改变,即可以由雷达上的碰撞传感器检测到的障碍物,例如底部有低矮空间的书柜、茶几、沙发等,例如可以确定雷达上的碰撞传感器检测到的沙发底部的边缘为悬空障碍物。Among them, suspended obstacles are invisible to the radar (cannot be observed by the radar), but can trigger changes in the output signal of the collision sensor on the radar, that is, obstacles that can be detected by the collision sensor on the radar, such as those with low spaces at the bottom. Bookcases, coffee tables, sofas, etc., for example, it can be determined that the edge of the bottom of the sofa detected by the collision sensor on the radar is a suspended obstacle.
举例而言,在清洁机器人沿悬空障碍物进行清洁时,可以沿障碍物的正投影的外轮廓进行地面清洁,此时障碍物外轮廓附近的区域未清洁。通过控制清洁机器人沿所述悬空障碍物进行边界补漏清洁,则可以减少或消除悬空障碍物外轮廓附近的清洁盲区;清洁机器人沿所述悬空障碍物进行边界补漏清洁,包括清洁机器人沿障碍物的正投影的外轮廓进行地面清洁的同时进行补漏清洁操作,例如可以根据雷达上的碰撞传感器的输出信号确定悬空障碍物下清洁的范围,或者还可以融合视觉传感器的视觉信号确定悬空障碍物的外轮廓附近的清洁盲区,以及控制清洁机器人对确定的范围进行清洁。For example, when the cleaning robot cleans along a suspended obstacle, it can clean the ground along the outer contour of the orthographic projection of the obstacle. At this time, the area near the outer contour of the obstacle is not cleaned. By controlling the cleaning robot to perform boundary leak cleaning along the suspended obstacle, the cleaning blind area near the outer contour of the suspended obstacle can be reduced or eliminated; the cleaning robot performs boundary leak cleaning along the suspended obstacle, including the cleaning robot along the obstacle. The outer contour of the orthographic projection is used for floor cleaning and leak-proofing cleaning operations at the same time. For example, the cleaning range under the suspended obstacle can be determined based on the output signal of the collision sensor on the radar, or the visual signal of the visual sensor can be combined to determine the outer surface of the suspended obstacle. Clean the blind area near the contour, and control the cleaning robot to clean the determined range.
举例而言,非悬空障碍物为雷达可以观测到且可能与清洁机器人的主体发生碰撞的障碍物,例如箱式床等。For example, non-suspended obstacles are obstacles that can be observed by radar and may collide with the main body of the cleaning robot, such as a box bed.
举例而言,所述根据所述对象类型对应的预设频率,控制所述清洁机器人对所述预设清洁区域执行边界补漏清洁任务,包括:确定所述边界补漏清洁对象为悬空障碍物时,根据所述第一预设频率,控制所述清洁机器人沿所述悬空障碍物进行边界补漏清洁;确定所述边界补漏清洁对象为非悬空障碍物时,根据所述第二预设频率,控制所述清洁机器人对所述非悬空障碍物执行边界补漏清洁任务。具体的,所述第二预设频率与所述第一预设频率不同。For example, controlling the cleaning robot to perform a boundary leak cleaning task on the preset cleaning area according to the preset frequency corresponding to the object type includes: when determining that the boundary leak cleaning object is a suspended obstacle, According to the first preset frequency, the cleaning robot is controlled to perform boundary leak cleaning along the suspended obstacle; when it is determined that the boundary leak cleaning object is a non-suspended obstacle, the cleaning robot is controlled according to the second preset frequency. The cleaning robot performs a boundary leak-filling cleaning task on the non-suspended obstacle. Specifically, the second preset frequency is different from the first preset frequency.
可选的,所述第一预设频率高于所述第二预设频率。沙发底部边缘等悬空障碍物附近的脏污,相对于非悬空障碍物附近的脏污更容易让人注意到,通过以较高的频率对悬空障碍物附近的脏污进行清洁,可以得到较好的清洁效果;通过以较低的频率对非悬空障碍物附近的脏污进行清洁,可以提高清洁效率。Optionally, the first preset frequency is higher than the second preset frequency. Dirt near suspended obstacles such as the bottom edge of the sofa is more likely to be noticed than dirt near non-suspended obstacles. By cleaning the dirt near suspended obstacles at a higher frequency, better results can be achieved. cleaning effect; by cleaning dirt near non-suspended obstacles at a lower frequency, cleaning efficiency can be improved.
示例性的,所述预设频率包括第三预设频率和第四预设频率,所述对象类型包括离散障碍物和聚集障碍物。Exemplarily, the preset frequency includes a third preset frequency and a fourth preset frequency, and the object types include discrete obstacles and aggregated obstacles.
其中,离散障碍物表示障碍物的分布比较分散的边界补漏清洁对象,离散障碍物例如为客厅中周围没有其它任何物品的纸箱,聚集障碍物表示分布比较集中的边界补漏清洁对象,聚集障碍物例如为厨房中聚集在一起的餐桌/椅的桌子腿/椅子腿需要避障,当然也不限于此。Among them, discrete obstacles represent boundary leak cleaning objects with relatively scattered distribution of obstacles. Discrete obstacles are, for example, cartons with no other items around in the living room. Aggregated obstacles represent boundary leak cleaning objects with relatively concentrated distribution. Aggregated obstacles are, for example, Obstacle avoidance is required for the table/chair legs of the dining table/chairs clustered together in the kitchen, but is certainly not limited to this.
举例而言,所述根据所述对象类型对应的预设频率,控制所述清洁机器人对所述预设清洁区域执行边界补漏清洁任务,包括:确定所述边界补漏清洁对象为离散障碍物时,根据所述第三预设频率,控制所述清洁机器人沿所述离散障碍物进行边界补漏清洁;确定所述边界补漏清洁对象为聚集障碍物时,根据所述第四预设频率,控制所述清洁机器人对所述聚集障碍物执行边界补漏清洁任务。具体的,所述第三预设频率和第四预设频率不同。For example, controlling the cleaning robot to perform a boundary leak cleaning task on the preset cleaning area according to the preset frequency corresponding to the object type includes: when determining that the boundary leak cleaning object is a discrete obstacle, According to the third preset frequency, the cleaning robot is controlled to perform boundary leak cleaning along the discrete obstacles; when it is determined that the boundary leak cleaning object is a gathered obstacle, the cleaning robot is controlled according to the fourth preset frequency. The cleaning robot performs a boundary leak cleaning task on the gathered obstacles. Specifically, the third preset frequency and the fourth preset frequency are different.
可选的,所述第三预设频率高于所述第四预设频率。由于用户可能对离散障碍物附近清洁盲区的脏污敏感性较高,通过以较高的频率对离散障碍物进行边界补漏清洁,可以得到较好的清洁效果;通过以较低的频率对聚集障碍物进行清洁,可以提高清洁效率。Optionally, the third preset frequency is higher than the fourth preset frequency. Since users may be more sensitive to dirt in cleaning blind areas near discrete obstacles, better cleaning results can be obtained by performing boundary patching cleaning on discrete obstacles at a higher frequency; by cleaning clustered obstacles at a lower frequency Cleaning objects can improve cleaning efficiency.
示例性的,所述边界补漏清洁对象对应至少两种所述对象类型,一种所述对象类型对应一个所述预设频率。例如边界补漏清洁对象可以既对应悬空障碍物又对应离散障碍物,悬空障碍物对应第一预设频率,离散障碍物对应第三预设频率,则边界补漏清洁对象对应第一预设频率和第三预设频率。所述根据所述对象类型对应的预设频率,控制所述清洁机器人对所述预设清洁区域执行边界补漏清洁任务,包括:根据至少两个所述对象类型对应的预设频率中最高的预设频率,对所述预设清洁区域进行边界补漏清洁。举例而言,当一边界补漏清洁对象既对应悬空障碍物又对应离散障碍物时,则根据所述第一预设频率、所述第三预设频率中较大的预设频率,控制所述清洁机器人对边界补漏清洁对象执行边界补漏清洁任务。以选择更合适的频率执行边界补漏清洁任务,一方面保证了房间的整体清洁效果,另一方面也保证了房间的整体清洁效率,用户体验更好。Exemplarily, the boundary leak cleaning object corresponds to at least two of the object types, and one of the object types corresponds to one of the preset frequencies. For example, the boundary leak cleaning object can correspond to both suspended obstacles and discrete obstacles. The suspended obstacles correspond to the first preset frequency and the discrete obstacles correspond to the third preset frequency. Then the boundary leak cleaning object corresponds to the first preset frequency and the third preset frequency. Three preset frequencies. Controlling the cleaning robot to perform a boundary leak cleaning task on the preset cleaning area according to the preset frequency corresponding to the object type includes: according to the highest preset frequency among at least two preset frequencies corresponding to the object type. Set the frequency to perform boundary leak repair cleaning on the preset cleaning area. For example, when a boundary leak-proofing cleaning object corresponds to both a suspended obstacle and a discrete obstacle, the system is controlled according to the larger preset frequency of the first preset frequency and the third preset frequency. The cleaning robot performs boundary leakage cleaning tasks on boundary leakage cleaning objects. Choosing a more appropriate frequency to perform boundary leak cleaning tasks not only ensures the overall cleaning effect of the room, but also ensures the overall cleaning efficiency of the room and provides a better user experience.
在一些实施方式中,所述方法还包括:获取边界补漏清洁对象所在区域的环境类型;所述根据所述预设频率,控制所述清洁机器人对所述预设清洁区域执行边界补漏清洁任务,包括:根据所述环境类型对应的预设频率,控制所述清洁机器人对所述预设清洁区域执行边界补漏清洁任务。举例而言,环境类型包括但不限于以下至少一种:公共区域、非公共区域类型、狭窄区域、非狭窄区域。In some embodiments, the method further includes: obtaining the environment type of the area where the boundary leak cleaning object is located; and controlling the cleaning robot to perform a boundary leak cleaning task on the preset cleaning area according to the preset frequency, The method includes: controlling the cleaning robot to perform a boundary leak-filling cleaning task on the preset cleaning area according to a preset frequency corresponding to the environment type. For example, the environment type includes but is not limited to at least one of the following: public area, non-public area type, narrow area, and non-narrow area.
示例性的,所述预设频率包括第五预设频率和第六预设频率,所述边界补漏清洁对象所在区域的环境类型包括公共区域和非公共区域。Exemplarily, the preset frequency includes a fifth preset frequency and a sixth preset frequency, and the environment type of the area where the boundary leak cleaning object is located includes public areas and non-public areas.
其中,公共区域可以包括客厅、餐厅、厨房、阳台、走道等各成员共享的区域,非公共区域包括卧室、书房等私密性较强的区域;各房间是公共区域还是非公共区域,可以由清洁机器人进行自动识别,如根据家具种类识别,或者也可以由用户自己设置。Among them, public areas can include living rooms, dining rooms, kitchens, balconies, walkways and other areas shared by members. Non-public areas include bedrooms, study rooms and other areas with strong privacy. Whether each room is a public area or a non-public area can be determined by the cleaning staff. The robot performs automatic recognition, such as based on the type of furniture, or it can be set by the user.
举例而言,所述根据所述环境类型对应的预设频率,控制所述清洁机器人对所述预设清洁区域执行边界补漏清洁任务,包括:确定所述边界补漏清洁对象所在区域的环境类型为公共区域时,根据所述第五预设频率,控制所述清洁机器人对所述公共区域的房间边界和/或所述公共区域的障碍物的轮廓执行边界补漏清洁任务;确定所述边界补漏清洁对象所在区域的环境类型为非公共区域时,根据所述第六预设频率,控制所述清洁机器人对所述非公共区域的房间边界和/或所述非公共区域的障碍物的轮廓执行边界补漏清洁任务。具体的,所述第六预设频率与所述第五预设频率不同。For example, controlling the cleaning robot to perform a boundary leak cleaning task on the preset cleaning area according to the preset frequency corresponding to the environment type includes: determining that the environment type of the area where the boundary leak cleaning object is located is In a public area, according to the fifth preset frequency, the cleaning robot is controlled to perform a boundary leak-filling cleaning task on the room boundary of the public area and/or the outline of the obstacles in the public area; determine the boundary leak-filling cleaning task When the environment type of the area where the object is located is a non-public area, according to the sixth preset frequency, the cleaning robot is controlled to perform boundary execution on the room boundary of the non-public area and/or the outline of the obstacles in the non-public area. Leak cleaning tasks. Specifically, the sixth preset frequency is different from the fifth preset frequency.
可选的,所述第五预设频率高于所述第六预设频率。通过以较高的频率对容易脏的公共区域执行边界补漏清洁任务,可以得到较好的清洁效果;通过以较低的频率对非公共区域进行清洁,可以提高清洁效率。Optionally, the fifth preset frequency is higher than the sixth preset frequency. By performing border leak cleaning tasks on easily dirty public areas at a higher frequency, better cleaning results can be obtained; by cleaning non-public areas at a lower frequency, the cleaning efficiency can be improved.
示例性的,所述预设频率包括第七预设频率和第八预设频率,所述边界补漏清洁对象所在区域的环境类型包括狭窄区域和非狭窄区域。Exemplarily, the preset frequency includes a seventh preset frequency and an eighth preset frequency, and the environment type of the area where the boundary leak cleaning object is located includes a narrow area and a non-narrow area.
请参阅图17,清洁机器人在一预设区域行进时,清洁机器人距离其左右两侧的障碍物和/或房间边界的距离之和小于或等于预定值L0,即l1+l2≤L0时,确定所述预设区域为狭窄区域;当清洁机器人距离其左右两侧的障碍物和/或房间边界的距离之和大于所述预定值时,所述预设区域为非狭窄区域。可以理解,清洁机器人需要清洁的整个所述预设清洁区域都是所述狭窄区域或都是非狭窄区域,或者清洁机器人需要清洁的整个所述预设清洁区域中的一些部分区域是所述狭窄区域,还有一些部分区域是非狭窄区域。Please refer to Figure 17. When the cleaning robot travels in a preset area, the sum of the distances between the cleaning robot and the obstacles and/or room boundaries on its left and right sides is less than or equal to the predetermined value L0, that is, when l1+l2≤L0, it is determined The preset area is a narrow area; when the sum of the distances between the cleaning robot and the obstacles and/or room boundaries on its left and right sides is greater than the predetermined value, the preset area is a non-narrow area. It can be understood that the entire preset cleaning area that the cleaning robot needs to clean is the narrow area or is a non-narrow area, or some partial areas of the entire preset cleaning area that the cleaning robot needs to clean are the narrow area. , and some partial areas are non-narrow areas.
举例而言,所述根据所述环境类型对应的预设频率,控制所述清洁机器人对所述预设清洁区域执行边界补漏清洁任务,包括:确定所述边界补漏清洁对象所在区域的环境类型为狭窄区域时,根据所述第七预设频率,控制所述清洁机器人对所述狭窄区域的房间边界和/或障碍物的轮廓执行边界补漏清洁任务;确定所述边界补漏清洁对象所在区域的环境类型为非狭窄区域时,根据所述第八预设频率,控制所述清洁机器人对所述非狭窄区域的房间边界和/或障碍物的轮廓执行边界补漏清洁任务。具体的,所述第八预设频率与所述第七预设频率不同。For example, controlling the cleaning robot to perform a boundary leak cleaning task on the preset cleaning area according to the preset frequency corresponding to the environment type includes: determining that the environment type of the area where the boundary leak cleaning object is located is In a narrow area, according to the seventh preset frequency, the cleaning robot is controlled to perform a boundary leak cleaning task on the room boundary and/or the outline of obstacles in the narrow area; determine the environment of the area where the boundary leak cleaning object is located When the type is a non-narrow area, the cleaning robot is controlled to perform a boundary leak cleaning task on the outline of the room boundary and/or obstacles in the non-narrow area according to the eighth preset frequency. Specifically, the eighth preset frequency is different from the seventh preset frequency.
可选的,所述第七预设频率高于所述第八预设频率,即狭窄区域的边界清洁频率高于非狭窄区域的边界清洁频率。由于用户对狭窄区域中障碍物和/或房间边界附近清洁盲区的脏污敏感性较强,通过以较高的频率对狭窄区域的脏污进行清洁,可以起到较好的清洁效果;通过以较低的频率对非狭窄区域的脏污进行清洁,可以提高清洁效率。Optionally, the seventh preset frequency is higher than the eighth preset frequency, that is, the boundary cleaning frequency of the narrow area is higher than the boundary cleaning frequency of the non-narrow area. Since users are highly sensitive to obstacles in narrow areas and/or dirt in cleaning blind areas near room boundaries, cleaning dirt in narrow areas at a higher frequency can achieve a better cleaning effect; by cleaning dirt in narrow areas with a higher frequency; Cleaning dirt in non-narrow areas less frequently can improve cleaning efficiency.
示例性的,所述边界补漏清洁对象所在区域对应至少两种所述环境类型,一种所述环境类型对应一个所述预设频率,即所述边界补漏清洁对象所在区域对应至少两个所述预设频率;举例而言,所述第五预设频率、所述第六预设频率、所述第七预设频率、所述第八预设频率不同。示例性的,所述边界补漏清洁对象所在区域的环境类型可以既是公共区域又是狭窄区域。Exemplarily, the area where the boundary leak cleaning object is located corresponds to at least two of the environmental types, and one of the environmental types corresponds to one of the preset frequencies, that is, the area where the boundary leak cleaning object is located corresponds to at least two of the environmental types. Preset frequency; for example, the fifth preset frequency, the sixth preset frequency, the seventh preset frequency, and the eighth preset frequency are different. For example, the environment type of the area where the boundary leak cleaning object is located may be both a public area and a narrow area.
示例性的,所述根据所述环境类型对应的预设频率,控制所述清洁机器人执行边界补 漏清洁任务,包括:根据至少两个所述环境类型对应的预设频率中最高的预设频率,控制所述清洁机器人对所述预设清洁区域的边界补漏清洁对象执行边界补漏清洁任务。举例而言,当边界补漏清洁对象所在区域的环境类型既是公共区域又是狭窄区域时,则根据所述第五预设频率、所述第七预设频率中较大的预设频率,控制所述清洁机器人对所述预设清洁区域的边界补漏清洁对象执行边界补漏清洁任务,以选择更合适的频率执行边界补漏清洁任务,一方面保证了房间的整体清洁效果,另一方面也保证了房间的整体清洁效率,用户体验更好。Exemplarily, controlling the cleaning robot to perform a boundary leak-filling cleaning task according to the preset frequency corresponding to the environment type includes: according to the highest preset frequency among at least two preset frequencies corresponding to the environment type, The cleaning robot is controlled to perform a boundary leak-filling cleaning task on a boundary leak-filling cleaning object in the preset cleaning area. For example, when the environment type of the area where the boundary leak cleaning object is located is both a public area and a narrow area, then all the parameters are controlled according to the larger preset frequency of the fifth preset frequency and the seventh preset frequency. The cleaning robot performs a boundary leak cleaning task on the boundary leak cleaning object of the preset cleaning area, and selects a more appropriate frequency to perform the boundary leak cleaning task. On the one hand, it ensures the overall cleaning effect of the room, and on the other hand, it also ensures that the room The overall cleaning efficiency is better and the user experience is better.
在一些实施方式中,所述控制方法可以包括:获取边界补漏清洁对象的对象类型;以及获取所述边界补漏清洁对象所在区域的环境类型。所述根据所述预设频率,控制所述清洁机器人对所述预设清洁区域执行边界补漏清洁任务,包括:确定所述边界补漏清洁对象的对象类型对应的预设频率;以及确定所述边界补漏清洁对象在区域的环境类型对应的预设频率;根据所述对象类型和所述环境类型对应的预设频率中最高的预设频率,控制所述清洁机器人对所述预设清洁区域执行边界补漏清洁任务。In some embodiments, the control method may include: obtaining the object type of the boundary leak cleaning object; and obtaining the environment type of the area where the boundary leak cleaning object is located. Controlling the cleaning robot to perform a boundary leak cleaning task on the preset cleaning area according to the preset frequency includes: determining a preset frequency corresponding to the object type of the boundary leak cleaning object; and determining the boundary The preset frequency corresponding to the environment type of the leak-proof cleaning object in the area; according to the highest preset frequency among the preset frequencies corresponding to the object type and the environment type, the cleaning robot is controlled to perform boundary execution on the preset cleaning area Leak cleaning tasks.
示例性的,当所述边界补漏清洁对象对应多个对象类型和/或环境类型时,根据所述多个对象类型和/或环境类型各自对应的预设频率中最高的预设频率,对所述边界补漏清洁对象执行边界补漏清洁任务。举例而言,所述第一预设频率、所述第二预设频率、所述第三预设频率、所述第四预设频率、所述第五预设频率、所述第六预设频率、所述第七预设频率、所述第八预设频率不同。当所述预设清洁区域为狭窄区域,该狭窄区域既包括悬空障碍物又包括非悬空障碍物时,可以根据所述第一预设频率和所述第七预设频率中较大的预设频率,对所述狭窄区域的所述悬空障碍物执行边界补漏清洁任务,根据所述第二预设频率和所述第七预设频率中较大的预设频率,对所述狭窄区域的所述非悬空障碍物执行边界补漏清洁任务。当所述预设清洁区域为非公共区域内的狭窄区域,该狭窄区域既包括悬空障碍物又包括非悬空障碍物时,可以根据所述第一预设频率、所述第六预设频率和所述第七预设频率中较大的预设频率,对所述狭窄区域的所述悬空障碍物执行边界补漏清洁任务,根据所述第二预设频率、所述第六预设频率和所述第七预设频率中较大的预设频率,对所述狭窄区域的所述非悬空障碍物执行边界补漏清洁任务。举例而言,可以根据房间中边界补漏清洁对象的多种类型确定该边界补漏清洁对象的边界补漏清洁任务的预设频率,以及根据确定的预设频率分别对各边界补漏清洁对象执行边界补漏清洁任务,在同一房间空间对不同类型的边界补漏清洁对象选择更合适的频率的执行边界补漏清洁任务,一方面保证了房间的整体清洁效果,另一方面也保证了房间的整体清洁效率边界补漏清洁对象,用户体验更好。Exemplarily, when the boundary leak cleaning object corresponds to multiple object types and/or environment types, the highest preset frequency among the respective corresponding preset frequencies of the multiple object types and/or environment types is used. The boundary trap cleaning object performs the boundary trap cleaning task. For example, the first preset frequency, the second preset frequency, the third preset frequency, the fourth preset frequency, the fifth preset frequency, the sixth preset frequency The frequency, the seventh preset frequency, and the eighth preset frequency are different. When the preset cleaning area is a narrow area, and the narrow area includes both suspended obstacles and non-suspended obstacles, the larger preset frequency among the first preset frequency and the seventh preset frequency can be used. Frequency, perform boundary leakage cleaning tasks on the suspended obstacles in the narrow area, and perform cleaning on all the suspended obstacles in the narrow area according to the larger preset frequency of the second preset frequency and the seventh preset frequency. The above non-suspended obstacles perform boundary leakage cleaning tasks. When the preset cleaning area is a narrow area in a non-public area, and the narrow area includes both suspended obstacles and non-suspended obstacles, the first preset frequency, the sixth preset frequency and the The larger preset frequency among the seventh preset frequencies is used to perform a boundary leak cleaning task on the suspended obstacles in the narrow area. According to the second preset frequency, the sixth preset frequency and the The larger preset frequency among the seventh preset frequencies is used to perform a boundary leak cleaning task on the non-suspended obstacles in the narrow area. For example, the preset frequency of the boundary leak cleaning task of the boundary leak cleaning object can be determined according to the multiple types of boundary leak cleaning objects in the room, and the boundary leak cleaning task can be performed on each boundary leak cleaning object according to the determined preset frequency. Task, select a more appropriate frequency to perform boundary leak cleaning tasks for different types of boundary leak cleaning objects in the same room space. On the one hand, it ensures the overall cleaning effect of the room, and on the other hand, it also ensures the overall cleaning efficiency of the room. Boundary leak cleaning cleaning Objects, user experience is better.
在一些实施方式中,所述方法还包括:获取所述清洁机器人的工作场景,所述工作场景包括以下至少一种:沿内角刷扫清洁、沿内角拖擦清洁、沿外角刷扫清洁、沿外角拖擦清洁、沿柱状体刷扫清洁、沿柱状体拖擦清洁、沿直线拖擦清洁。示例性的,所述控制所述清洁机器人执行边界补漏清洁任务,包括:根据所述清洁机器人的工作场景选择相应的边界补漏清洁策略;控制所述清洁机器人根据所述边界补漏清洁策略执行边界补漏清洁任务。所述边界补漏清洁策略为控制清洁机器人执行补漏清洁动作,以达到对清洁补漏对象进行沿边补漏清洁。边界补漏清洁策略包括旋转策略、后退清洁策略、切向清洁策略。通过根据清洁机器人的工作场景选择相应的边界补漏清洁策略,可以使得清洁更有针对性,具有更好的清洁效果和/或清洁效率,智能化程度更高。In some embodiments, the method further includes: obtaining a working scene of the cleaning robot, and the working scene includes at least one of the following: brushing and cleaning along the inner corner, dragging and cleaning along the inner corner, brushing and cleaning along the outer corner, and cleaning along the outer corner. Mop and clean the outer corners, brush and clean along the column, mop and clean along the column, and mop and clean along the straight line. Exemplarily, controlling the cleaning robot to perform a boundary leak cleaning task includes: selecting a corresponding boundary leak cleaning strategy according to the working scenario of the cleaning robot; controlling the cleaning robot to perform boundary leak cleaning according to the boundary leak cleaning strategy Cleaning tasks. The boundary leak-filling cleaning strategy is to control the cleaning robot to perform leak-filling cleaning actions, so as to perform leak-filling cleaning along the edges of the cleaning and leak-filling objects. Boundary leakage cleaning strategies include rotation strategy, retreat cleaning strategy, and tangential cleaning strategy. By selecting the corresponding boundary leak cleaning strategy according to the working scenario of the cleaning robot, cleaning can be made more targeted, with better cleaning effect and/or cleaning efficiency, and with a higher degree of intelligence.
示例性的,如图18所示,清洁机器人沿房间边界或障碍物的内角(内角可以为大于0度小于180度的内角,图示为90度的直角)进行清洁。当通过刷扫件沿内角刷扫清洁时,可以根据旋转清洁策略控制清洁机器人旋转以将风机的出风口靠近内角,借助出风口的气流将内角处的脏污扬起,进而再由刷扫件进行清理。示例性的,清洁机器人右侧面靠后方的位置开设有风机的出风口,清洁机器人的右侧沿房间边界或障碍物的轮廓进行清洁,在清洁内角时控制清洁机器人原地逆时针旋转,以使出风口的气流吹向内角,将内角地面的脏污向清洁机器人前端扬起,以便清洁机器人的刷扫件清扫和吸尘装置吸取脏污。当通过拖擦件沿内 角拖擦清洁时,可以根据旋转清洁策略控制清洁机器人沿内角的第一侧行进,以及在行进至内角与内角的第二侧抵接时原地旋转以对内角的至少部分区域进行拖擦,之后再沿内角的第二侧行进。For example, as shown in Figure 18, the cleaning robot cleans along the inner angle of the room boundary or obstacle (the inner angle can be an inner angle greater than 0 degrees and less than 180 degrees, and the illustration is a 90-degree right angle). When the cleaning tool is used to clean along the inner corner, the cleaning robot can be controlled to rotate according to the rotation cleaning strategy to bring the air outlet of the fan close to the inner corner. The airflow from the air outlet will lift up the dirt at the inner corner, and then the cleaning tool will be swept. Clean up. For example, an air outlet for a fan is provided at the rear of the right side of the cleaning robot. The right side of the cleaning robot cleans along the boundaries of the room or the outline of obstacles. When cleaning inner corners, the cleaning robot is controlled to rotate counterclockwise in place to Make the airflow from the air outlet blow to the inner corner, and lift the dirt on the ground in the inner corner toward the front of the cleaning robot, so that the cleaning robot's sweeping and vacuuming devices can absorb the dirt. When the mopping member is used to mop and clean along the inner corner, the cleaning robot can be controlled according to the rotation cleaning strategy to travel along the first side of the inner corner, and when traveling to the inner corner and contacting the second side of the inner corner, rotate in situ to at least clean the inner corner. Drag partially and then along the second side of the inside corner.
示例性的,如图19和图20所示,清洁机器人沿房间边界或障碍物的外角(外角可以为大于180度的外角,图示为270度的外角)进行清洁。For example, as shown in Figures 19 and 20, the cleaning robot cleans along the outer corner of the room boundary or obstacle (the outer angle can be an outer angle greater than 180 degrees, and the illustration is an outer angle of 270 degrees).
请参阅图19,当通过刷扫件沿外角刷扫清洁时,一种可选的边界补漏清洁策略是后退清洁策略,例如在清洁机器人由外角的第一侧转向(如右转)外角的第二侧之后,控制清洁机器人后退预设距离之后再行进(虚线箭头所示),以对转向时的漏扫区域进行清洁。另一种可选的边界补漏清洁策略是转向补漏,例如在清洁机器人由外角的第一侧向外角的第二侧转向(如右转)之前,先控制清洁机器人在外角的转角处沿第一侧延伸的方向行进预定距离(实线箭头所示),该预定距离可以等于或得知等于清洁机器人的半径;之后控制清洁机器人原地转向(如绕行走轮之间的某点原地转向),之后再控制清洁机器人沿外角的第二侧行进使刷扫件与外角的第二侧抵接。Please refer to Figure 19. When cleaning along the outer corner with the brushing element, an optional boundary leak cleaning strategy is a backward cleaning strategy. For example, when the cleaning robot turns from the first side of the outer corner to (such as turning right) the first side of the outer corner. After the two sides, the cleaning robot is controlled to retreat a preset distance before moving forward (shown by the dotted arrow) to clean the missed area when turning. Another optional boundary leak cleaning strategy is to turn the cleaning robot to the second side of the outer corner (such as turning right) before turning from the first side of the outer corner to the second side of the outer corner. The predetermined distance can be equal to or known to be equal to the radius of the cleaning robot; and then the cleaning robot is controlled to turn in place (such as turning around a certain point between the running wheels). ), and then control the cleaning robot to move along the second side of the outer corner so that the brushing element contacts the second side of the outer corner.
请参阅图20,当通过拖擦件沿外角拖擦清洁时,一种可选的边界补漏清洁策略是后退清洁策略,例如在清洁机器人由外角的第一侧向外角的第二侧转向(如左转)之前,控制清洁机器人先前进预设距离后再后退预设距离,以完成补漏扫动作。另一种可选的边界补漏清洁策略是转向补漏,与通过刷扫件沿外角刷扫清洁时的转向补漏相同,此处不再赘述。Referring to Figure 20, when the mopping member is used to clean along the outer corner, an optional boundary leak cleaning strategy is a backward cleaning strategy, for example, when the cleaning robot turns from the first side of the outer corner to the second side of the outer corner (such as Before turning left), the cleaning robot is controlled to advance a preset distance and then retreat a preset distance to complete the leak-repairing and sweeping action. Another optional edge patching cleaning strategy is turning patching, which is the same as turning patching when cleaning by brushing along the outside corners with a brushing piece, and will not be discussed again here.
请参阅图21,清洁机器人沿柱状体刷扫清洁,请参阅图22,清洁机器人沿柱状体拖擦清洁,环绕柱状体的灰色圆环表示清洁盲区,如漏扫区域,其中柱状体包括但不限于圆柱体、桌腿、椅子腿。图23所示为一实施方式中在沿柱状体刷扫清洁或沿柱状体拖擦清洁的工作场景对应的边界补漏清洁策略,可以称为切向清洁策略,例如控制清洁机器人沿着圆柱的切向每直行一段距离,就顺时针(或逆时针,根据柱状体与清洁机器人的位置关系确定)旋转一定角度,保持清洁机器人的运动方向与圆柱相切,重复直行与旋转运动;当旋转的频率越高,则边刷/拖布与圆柱的相切次数越多,完成补漏扫的面积就越大。Please refer to Figure 21. The cleaning robot brushes and cleans along the columnar body. Please refer to Figure 22. The cleaning robot mops and cleans along the columnar body. The gray ring surrounding the columnar body represents the cleaning blind area, such as the missed scanning area, in which the columnar body includes but does not Limited to cylinders, table legs, and chair legs. Figure 23 shows the boundary leakage cleaning strategy corresponding to the working scenario of brushing cleaning along the columnar body or dragging cleaning along the columnar body in one embodiment. It can be called a tangential cleaning strategy, for example, controlling the cleaning robot to move along the tangential direction of the cylinder. For every straight distance, rotate a certain angle clockwise (or counterclockwise, determined according to the positional relationship between the cylinder and the cleaning robot), keep the cleaning robot's motion direction tangent to the cylinder, and repeat the straight and rotating motion; when the frequency of rotation The higher it is, the more times the side brush/mop touches the cylinder, and the larger the area to complete the leak repair sweep.
在一些实施方式中,所述方法还包括:获取清洁任务地图;根据所述清洁任务地图,控制所述清洁机器人至少通过拖擦件对所述预设清洁区域进行清洁;在判断满足所述边界补漏清洁条件时,根据至少一个所述预设频率控制所述清洁机器人执行所述边界补漏清洁任务;当检测到地毯时,控制所述清洁机器人对所述地毯进行沿边探索,以获取所述地毯的轮廓;根据所述地毯的轮廓,在所述清洁任务地图中增加所述地毯对应的地毯区域。In some embodiments, the method further includes: obtaining a cleaning task map; controlling the cleaning robot to clean the preset cleaning area at least through a dragging member according to the cleaning task map; and after determining that the boundary is satisfied. When the leakage cleaning condition is met, the cleaning robot is controlled to perform the boundary leakage cleaning task according to at least one of the preset frequencies; when a carpet is detected, the cleaning robot is controlled to explore the carpet along the edge to obtain the carpet. According to the outline of the carpet, add the carpet area corresponding to the carpet in the cleaning task map.
示例性的,可以先根据所述清洁任务地图控制清洁机器人对预设清洁区域中的非地毯区域进行拖擦(或同时刷扫和拖擦),在满足边界补漏清洁条件时,还可以根据至少一个预设频率控制清洁机器人执行边界补漏清洁任务,以对至少部分清洁盲区进行清洁;在对所述非地毯区域进行清洁时可以检测到地毯,例如通过传感器单元检测到地毯,在检测到地毯时控制清洁机器人对地毯进行沿边探索,确定该地毯对应的地毯区域,以及将所述地毯区域更新到清洁任务地图中。For example, the cleaning robot can first be controlled according to the cleaning task map to mop (or brush and mop at the same time) non-carpet areas in the preset cleaning area. When the boundary leak cleaning conditions are met, the cleaning robot can also be controlled according to at least A preset frequency controls the cleaning robot to perform a boundary leak cleaning task to clean at least part of the cleaning blind area; the carpet can be detected when cleaning the non-carpet area, for example, the carpet is detected through a sensor unit, and when the carpet is detected Control the cleaning robot to explore the carpet along the edge, determine the carpet area corresponding to the carpet, and update the carpet area into the cleaning task map.
示例性的,所述方法还包括:当满足地毯清洁条件时,根据所述清洁任务地图中的地毯区域,控制所述清洁机器人通过刷扫件对所述地毯区域的地毯进行清洁。举例而言,在清洁任务地图中的所有非地毯区域均拖擦完毕,或者所述预设清洁区域的所有非地毯区域均清洁完毕后,判定满足所述地毯清洁条件,以及控制所述清洁机器人通过刷扫件对所述地毯区域的地毯进行清洁。举例而言,在地毯清洁开关(基站/清洁机器人上的按键,或者用户终端上的虚拟开关)被设置为开的状态时,可以在所有非地毯区域均拖擦完毕后控制所述清洁机器人通过刷扫件对所述地毯区域的地毯进行清洁。可选的,在清洁完所有的非地毯区域之后,对拖擦件进行维护,如清洁拖擦件并甩干,之后按照地毯区域的清洁顺序对地毯进行清洁。在拖擦件甩干后对地毯进行清洁,防止润湿地毯。Exemplarily, the method further includes: when carpet cleaning conditions are met, controlling the cleaning robot to clean the carpet in the carpet area by using a brush according to the carpet area in the cleaning task map. For example, after all non-carpet areas in the cleaning task map have been mopped, or all non-carpet areas in the preset cleaning area have been cleaned, it is determined that the carpet cleaning conditions are met, and the cleaning robot is controlled. The carpet in the carpet area is cleaned by means of a brush. For example, when the carpet cleaning switch (a button on the base station/cleaning robot, or a virtual switch on the user terminal) is set to the on state, the cleaning robot can be controlled to pass through after all non-carpet areas have been mopped. The brush sweeper cleans the carpet in the carpet area. Optionally, after cleaning all non-carpet areas, perform maintenance on the mop element, such as cleaning the mop element and drying it, and then clean the carpet in the order of cleaning the carpet area. Clean the carpet after the mop is dry to avoid wetting the carpet.
本申请实施例提供的清洁机器人的控制方法,包括:获取边界补漏清洁任务的一个或 至少两个预设频率,根据所述预设频率,控制所述清洁机器人对所述预设清洁区域执行边界补漏清洁任务。通过控制清洁机器人执行边界补漏清洁任务可以提高预设清洁区域的清洁效果,通过根据预设频率控制清洁机器人执行边界补漏清洁任务,可以兼顾清洁效率和清洁效果,清洁机器人更智能,用户体验更好。The control method of a cleaning robot provided by embodiments of the present application includes: obtaining one or at least two preset frequencies of a boundary leak cleaning task, and controlling the cleaning robot to perform boundary cleaning on the preset cleaning area according to the preset frequencies. Leak cleaning tasks. By controlling the cleaning robot to perform boundary leak-filling cleaning tasks, the cleaning effect of the preset cleaning area can be improved. By controlling the cleaning robot to perform boundary leak-filling cleaning tasks according to the preset frequency, both cleaning efficiency and cleaning effect can be taken into account. The cleaning robot is more intelligent and the user experience is better. .
请结合上述实施例参阅图24,图24是本申请实施例提供的控制装置300的示意性框图。该控制装置300包括处理器301和存储器302。Please refer to FIG. 24 in conjunction with the above embodiment. FIG. 24 is a schematic block diagram of the
示例性的,处理器301和存储器302通过总线303连接,该总线303比如为I2C(Inter-integrated Circuit)总线。For example, the
具体地,处理器301可以是微控制单元(Micro-controller Unit,MCU)、中央处理单元(Central Processing Unit,CPU)或数字信号处理器(Digital Signal Processor,DSP)等。Specifically, the
具体地,存储器302可以是Flash芯片、只读存储器(ROM,Read-Only Memory)磁盘、光盘、U盘或移动硬盘等。Specifically, the
其中,所述处理器301用于运行存储在存储器302中的计算机程序,并在执行所述计算机程序时实现前述任一实施例的清洁机器人的控制方法的步骤。The
请参阅图2至图6,可选地,清洁机器人100的机器人控制器104和/或基站200的基站控制器206可以单独或者配合作为控制装置300,用于实现本申请实施例的清洁机器人的控制方法的步骤;在另一些实施方式中,清洁系统包括单独的控制装置300,用于实现本申请实施例的清洁机器人的控制方法的步骤,该控制装置300可以设置在清洁机器人100上,或者可以设置在基站200上;当然也不限于此,例如控制装置300可以为除清洁机器人100和基站200之外的装置,如家庭智能终端、总控设备等。Referring to FIGS. 2 to 6 , optionally, the
在一些实施方式中,基站200上的控制装置300,如基站控制器206,用于实现本申请实施例的任一项清洁机器人的控制方法的步骤;清洁机器人100上的控制装置300,如机器人控制器104用于实现本申请实施例的任一项清洁机器人的控制方法的步骤;当然也不限于此,例如基站200上的控制装置300可以用于实现本申请实施例的清洁机器人的控制方法的步骤。In some embodiments, the
可以理解的,本申请实施例还提供一种基站,该基站至少用于对清洁机器人的拖擦件进行清洁,所述基站还包括控制装置300,如基站控制器206,用于实现本申请实施例的清洁机器人的控制方法的步骤。It can be understood that the embodiment of the present application also provides a base station, which is at least used to clean the mopping parts of the cleaning robot. The base station also includes a
可以理解的,本申请实施例还提供一种清洁机器人,该清洁机器人包括控制装置300,如机器人控制器104,用于实现本申请实施例的清洁机器人的控制方法的步骤。It can be understood that the embodiment of the present application also provides a cleaning robot, which includes a
请结合上述实施例参阅图2,图2是本申请实施例提供的清洁系统的示意图。Please refer to Figure 2 in conjunction with the above embodiment. Figure 2 is a schematic diagram of a cleaning system provided by an embodiment of the present application.
如图2至图6所示,清洁系统包括:As shown in Figures 2 to 6, the cleaning system includes:
清洁机器人100,清洁机器人100包括行走单元106和拖擦件110,还可以包括刷扫件120,行走单元106用于驱动清洁机器人100运动,以使拖擦件110对地面进行拖擦;刷扫件120包括边刷件121和/或中扫件122;The cleaning
基站200,基站200至少用于对清洁机器人100的拖擦件110进行清洁或更换;和/或基站200包括脏污检测装置以对清洁机器人100的拖擦件110脏污程度进行检测;以及The
控制装置300。
本申请实施例提供的清洁系统的具体原理和实现方式均与前述实施例的方法类似,此处不再赘述。The specific principles and implementation methods of the cleaning system provided by the embodiments of the present application are similar to the methods of the previous embodiments, and will not be described again here.
本申请实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时使所述处理器实现上述任一实施例的方法的步骤。Embodiments of the present application also provide a computer-readable storage medium. The computer-readable storage medium stores a computer program. When the computer program is executed by a processor, the processor can implement the steps of the method of any of the above embodiments. .
其中,所述计算机可读存储介质可以是前述任一实施例所述的控制装置的内部存储单元,例如所述控制装置的硬盘或内存。所述计算机可读存储介质也可以是所述控制装置的外 部存储设备,例如所述控制装置上配备的插接式硬盘,智能存储卡(Smart Media Card,SMC),安全数字(Secure Digital,SD)卡,闪存卡(Flash Card)等。The computer-readable storage medium may be an internal storage unit of the control device described in any of the preceding embodiments, such as a hard disk or memory of the control device. The computer-readable storage medium may also be an external storage device of the control device, such as a plug-in hard disk, a smart memory card (Smart Media Card, SMC), or a secure digital (SD) equipped on the control device. ) card, Flash Card, etc.
清洁设备,如清洁机器人可用于对地面进行自动清洁,应用场景可以为家庭室内清洁、大型场所清洁等。目前,存在清洁设备在清洁地面时无法检测清洁的地面的脏污程度的情形,无法体现清洁设备的清洁工作量,从而影响用户对清洁设备的使用体验。Cleaning equipment, such as cleaning robots, can be used to automatically clean the floor. The application scenarios can be household indoor cleaning, large-scale place cleaning, etc. Currently, there are situations where cleaning equipment cannot detect the degree of dirt on the cleaned floor when cleaning the floor, and cannot reflect the cleaning workload of the cleaning equipment, thereby affecting the user's experience of using the cleaning equipment.
请参阅图25,图25是本申请实施例提供的一种清洁设备清洁图像的处理方法的流程示意图。所述清洁设备清洁图像的处理方法可以应用在清洁设备系统中,用于对系统中的清洁设备的清洁图像进行生成和显示,以实现清洁设备的清洁工作量的可视化。Please refer to FIG. 25 , which is a schematic flowchart of a method for processing images cleaned by a cleaning device according to an embodiment of the present application. The method for processing cleaning images of cleaning equipment can be applied in a cleaning equipment system to generate and display cleaning images of cleaning equipment in the system, so as to visualize the cleaning workload of the cleaning equipment.
预设清洁区域可以为家庭空间、家庭空间的一个房间单元、一个房间单元的部分区域、大型场所或者大型场所的部分区域等任一个待清洁的区域。从另一角度看,预设清洁区域可以指首次清洁的较大区域,例如整个房间单元;也可以指对较大区域进行首次清洁后需要进行补漏清洁的区域,例如房间单元内的靠墙区域,或者障碍物区域。The preset cleaning area can be any area to be cleaned such as a family space, a room unit of a family space, a part of a room unit, a large place, or a part of a large place. From another perspective, the preset cleaning area can refer to the larger area that is cleaned for the first time, such as the entire room unit; it can also refer to the area that needs to be cleaned after the first cleaning of the larger area, such as the wall area in the room unit. , or obstacle area.
如图26所示,清洁设备系统(或者可以称为清洁系统或者清洁机器人系统)包括一个或多个清洁设备100,一个或多个基站200,以及处理装置300。示例性的,清洁设备100包括运动机构和清洁件。举例而言,清洁设备100的运动机构用于驱动清洁设备100运动,以使清洁件对预设清洁区域进行清洁,运动机构例如为行走单元,所述行走单元用于驱动所述清洁机器人运动。例如,在运动机构驱动清洁设备100运动时,清洁件接触预设清洁区域以在清洁设备100运动过程中,对预设清洁区域进行清洁。As shown in FIG. 26 , a cleaning equipment system (or may be called a cleaning system or a cleaning robot system) includes one or
在一些实施方式中,基站200用于和清洁设备100配合使用,例如,基站200可以向清洁设备100进行充电、基站200可以向清洁设备100提供停靠位置等。基站200还可以对清洁设备100的清洁件的进行清洁。In some embodiments, the
如图27所示,清洁设备系统包括一个或多个清洁设备100以及处理装置300。As shown in FIG. 27 , the cleaning equipment system includes one or
示例性的,清洁设备100包括运动机构、清洁件和维护机构。举例而言,运动机构用于驱动清洁设备100运动,以使清洁件对预设清洁区域进行清洁,维护机构用于对清洁件进行清洁。Exemplarily, the
处理装置300可以用于实现本申请实施例的清洁设备清洁图像的处理方法的步骤。The
可选地,清洁设备100中设置有用于控制清洁设备100的设备控制器,以及,基站200中设置有用于控制基站200的基站控制器。在一些实施方式中,清洁设备100的设备控制器和/或基站200的基站控制器可以单独或者配合作为处理装置300,用于实现本申请实施例的清洁设备清洁图像的处理方法的步骤;在另一些实施方式中,清洁设备系统包括单独的处理装置300,用于实现本申请实施例的清洁设备清洁图像的处理方法的步骤,该处理装置300可以设置在清洁设备100上,或者可以设置在基站200上;当然也不限于此,例如处理装置300可以为除清洁设备100和基站200之外的装置,如家庭智能终端、总控设备等。Optionally, the
清洁设备100可用于对预设清洁区域进行自动清洁,清洁设备100的应用场景可以为家庭室内清洁、大型场所清洁等。The
示例性的,清洁设备100的清洁件包括拖擦件、吸尘件中的至少一种,当然也不限于此。在一些实施方式中,清洁设备100或基站200中还包括脏污检测装置,脏污检测装置用于对清洁件的脏污程度进行检测。示例性的,脏污检测装置包括以下至少一种:视觉传感器、污水检测传感器,举例而言,可以根据视觉传感器获取清洁件的图像或颜色信息,根据清洁件的图像或颜色信息确定清洁件的脏污程度,示例性的,清洁件例如拖擦件的表面的灰度越深,拖擦件的脏污程度也越大,示例性的,清洁件例如吸尘件内部脏污距离吸尘件边缘越近,吸尘件的脏污程度也越大。举例而言,污水检测传感器可以获取清洗清洁件例如拖擦件得到的污水的检测信息,根据获取的检测信息可以确定清洁件的拖擦件脏污程度;可选的,污水检测传感器包括以下至少一种:可见光检测传感器、红外检测传感器、总溶解性固体物质检测传感器;举例而言,红外检测传感器采集污水的浊度值,可见光检测传感器采集污水的色 度值,总溶解性固体物质检测传感器采集污水的水导电率值;可以根据浊度值、色度值、水导电率值中的一种或多种,确定拖擦件的脏污程度;例如,污水的浊度值越大,水导电率越大,拖擦件的脏污程度也越大。当然确定清洁设备100的清洁件的脏污程度的方式也不限于此,在此不作限制。Illustratively, the cleaning components of the
如图25所示,本申请实施例的清洁设备清洁图像的处理方法,用于在清洁设备通过清洁件对一个或至少两个预设清洁区域完成清洁之后,生成清洁图像,所述方法包括步骤S110至步骤S120。As shown in Figure 25, the cleaning image processing method of the cleaning equipment according to the embodiment of the present application is used to generate a cleaning image after the cleaning equipment completes cleaning of one or at least two preset cleaning areas through cleaning parts. The method includes the steps S110 to step S120.
步骤S110、在清洁设备通过清洁件对一预设清洁区域进行一次清洁之后,获取所述预设清洁区域对应的脏污程度。Step S110: After the cleaning equipment cleans a preset cleaning area once using a cleaning piece, obtain the degree of dirt corresponding to the preset cleaning area.
在一些实施方式中,预设清洁区域可以是清洁设备基于任务地图划分的待清洁区域。可选地,任务地图可以是清洁设备响应于建图指令,对当前所在空间进行探索建立的,或者,可以是清洁设备根据清洁过程中识别的障碍物、地毯等更新的;可选地,任务地图可以是用户指定的清洁区域的地图,例如响应于用户在地图上选定的清洁区域例如一个或多个房间,确定该一个或多个房间为任务地图,或者,响应于用户在地图上圈出的清洁区域例如一个或多个房间的部分区域,确定该一个或多个房间的部分区域为任务地图,当然也不限于此。示例性的,预设清洁区域可以根据任务地图中的房间和/或所述清洁设备的工作量阈值确定。举例而言,各所述预设清洁区域的工作量均小于或等于所述工作量阈值,其中,工作量阈值用于指示所述清洁设备在完成所述工作量阈值对应的工作量之前中断当前清洁任务以及运动到基站进行维护,清洁任务指清洁设备响应于清洁指令对任务地图对应的所有预设清洁区域进行清洁的任务;举例而言,一个房间可以为一个预设清洁区域,或者一个房间有多个预设清洁区域;当然也不限于此,例如一个预设清洁区域包括一个房间以及另一个房间的至少部分区域。可选的,预设清洁区域可以根据用户在任务地图上的划分确定操作,或者根据预设的区域划分规则进行划分确定。In some embodiments, the preset cleaning area may be an area to be cleaned divided by the cleaning device based on a task map. Optionally, the task map can be established by the cleaning equipment by exploring the current space in response to the mapping instruction, or it can be updated by the cleaning equipment based on obstacles, carpets, etc. identified during the cleaning process; optionally, the task map The map may be a map of a cleaning area specified by the user, for example, in response to the user selecting a cleaning area such as one or more rooms on the map, determining the one or more rooms as a task map, or in response to the user circling the map. The cleaning area is, for example, a partial area of one or more rooms, and the partial area of one or more rooms is determined as a task map, and is certainly not limited to this. For example, the preset cleaning area may be determined based on the room in the task map and/or the workload threshold of the cleaning equipment. For example, the workload of each preset cleaning area is less than or equal to the workload threshold, where the workload threshold is used to instruct the cleaning equipment to interrupt the current operation before completing the workload corresponding to the workload threshold. Cleaning tasks and movement to the base station for maintenance. Cleaning tasks refer to tasks in which the cleaning equipment responds to cleaning instructions to clean all preset cleaning areas corresponding to the task map; for example, a room can be a preset cleaning area, or a room There are multiple preset cleaning areas; certainly not limited thereto, for example, a preset cleaning area includes one room and at least part of another room. Optionally, the preset cleaning area can be determined based on the user's division on the task map, or the division can be determined based on preset area division rules.
可选的,获取预设清洁区域对应的脏污程度(可以称为第一脏污程度),包括:在清洁设备通过清洁件完成对预设清洁区域的清洁之后,获取清洁件的脏污程度;以及,根据清洁件的脏污程度确定预设清洁区域对应的脏污程度。示例性的,在清洁设备通过拖擦件完成对预设清洁区域的清洁之后,获取拖擦件的脏污程度。Optionally, obtaining the degree of contamination corresponding to the preset cleaning area (which can be called the first degree of contamination) includes: after the cleaning device completes cleaning of the preset cleaning area through the cleaning piece, obtaining the degree of contamination of the cleaning piece. ; and, determining the degree of dirt corresponding to the preset cleaning area according to the degree of dirt of the cleaning parts. For example, after the cleaning device completes cleaning the preset cleaning area by using the mopping member, the degree of contamination of the mopping member is obtained.
示例性的,清洁件包括拖擦件。举例而言,拖擦件,如拖布收集脏污的能力有限,请参阅图28,拖布从刚洗完开始拖擦至拖擦件脏污值达到最大,当清洁机器人匀速前进且不重复拖一块脏污分布均匀的地面(面积无限大)时,拖擦件收集的脏污量,即拖擦件脏污值d和拖擦时间的关系为图28所示。当拖擦件脏污值d达到拖擦件的最大脏污值d_max之后,拖擦件将无法再通过拖地变得更脏,对地面的拖擦清洁效果也很差,可以确定拖擦件脏污值d达到了工作量阈值,需要停止拖地;还可以控制清洁设备运动到基站进行维护,如对拖擦件进行清洗,或者更换清洗后的拖擦件,或者,控制清洁设备的维护机构对清洁设备进行维护,如对拖擦件进行清洗,或者更换清洗后的拖擦件。可选的,拖擦件的最大脏污值d_max为经验值,例如可以在实验室中测得。By way of example, the cleaning component includes a mopping component. For example, the mopping part, such as a mop, has limited ability to collect dirt. Please refer to Figure 28. The mop starts mopping from the moment it is washed until the dirt value of the mopping part reaches the maximum. When the cleaning robot moves forward at a constant speed and does not repeatedly mop a piece. When the dirt is uniformly distributed on the ground (the area is infinite), the relationship between the amount of dirt collected by the mop piece, that is, the dirt value d of the mop piece and the mopping time is shown in Figure 28. When the dirt value d of the mopping part reaches the maximum dirt value d_max of the mopping part, the mopping part will no longer become dirtier by mopping the floor, and the mopping effect on the ground is also very poor. It can be determined that the mopping part When the dirt value d reaches the workload threshold, mopping needs to be stopped; the cleaning equipment can also be controlled to move to the base station for maintenance, such as cleaning the mopping parts, replacing the cleaned mopping parts, or controlling the maintenance of the cleaning equipment. The organization maintains the cleaning equipment, such as cleaning the mop parts or replacing the cleaned mop parts. Optionally, the maximum dirt value d_max of the mopping part is an empirical value, which can be measured in a laboratory, for example.
示例性的,清洁件包括吸尘件。举例而言,吸尘件具备一定的脏污容纳空间,当吸尘件的吸入的脏污量达到脏污容纳空间最大值时,吸尘件将无法再吸入更多的脏污量,对地面的吸尘清洁效果也很差,可以确定该吸尘件累加的工作,即吸入的脏污量达到了工作阈值,需要停止对地面进行吸尘;还可以控制清洁设备运动到基站进行维护,如对吸尘件中容纳的脏污量进行吸取,或者更换吸尘件,或者,控制清洁设备的维护机构对清洁设备进行维护,如对吸尘件中容纳的脏污量进行吸取,或者更换吸尘件。可选的,吸尘件的最大脏污量为经验值,例如可以在实验室中测得。By way of example, the cleaning component includes a dust suction component. For example, the vacuum cleaner has a certain dirt holding space. When the amount of dirt sucked by the vacuum cleaner reaches the maximum dirt holding space, the vacuum cleaner will no longer be able to suck in more dirt, which will affect the ground. The vacuum cleaning effect is also very poor. You can determine the cumulative work of the vacuum cleaner, that is, the amount of dirt inhaled reaches the working threshold, and you need to stop vacuuming the ground; you can also control the movement of the cleaning equipment to the base station for maintenance, such as To absorb the amount of dirt contained in the dust collector, or to replace the dust collector, or to control the maintenance mechanism of the cleaning equipment to maintain the cleaning equipment, such as to absorb the amount of dirt contained in the dust collector, or to replace the dust collector. Dust items. Optionally, the maximum amount of dirt on the dust collector is an empirical value, which can be measured in a laboratory, for example.
举例而言,在拖擦件脏污值小于拖擦件的最大脏污值d_max时,预设清洁区域对应的脏污值与拖擦件脏污值正相关,即拖擦件脏污值越大,预设清洁区域越脏;在拖擦件脏污值 等于拖擦件的最大脏污值d_max时,可以确定预设清洁区域很脏,而且在步骤S110完成对预设清洁区域的拖擦之后,该预设清洁区域仍有脏污未被拖擦件吸附。For example, when the dirt value of the mopping part is less than the maximum dirt value d_max of the mopping part, the dirt value corresponding to the preset cleaning area is positively correlated with the dirt value of the mopping part, that is, the greater the dirt value of the mopping part, the greater the dirt value of the mopping part. The larger, the dirtier the preset cleaning area is; when the dirt value of the mopping part is equal to the maximum dirt value d_max of the mopping part, it can be determined that the preset cleaning area is very dirty, and the mopping of the preset cleaning area is completed in step S110 Afterwards, there is still dirt in the preset cleaning area that has not been adsorbed by the mopping element.
举例而言,在吸尘件吸入的脏污量小于吸尘件的最大脏污量时,预设清洁区域对应的脏污程度与吸尘件的脏污程度正相关,即吸尘件的脏污程度越大,预设清洁区域越脏;在吸尘件吸入的脏污量等于吸尘件的最大脏污量时,可以确定预设清洁区域很脏,而且较大可能完成此次对预设清洁区域的清洁之后例如在完成对预设清洁区域的吸尘之后,该预设清洁区域仍有脏污未被吸尘件吸入。For example, when the amount of dirt inhaled by the dust collector is less than the maximum dirt amount of the dust collector, the degree of dirt corresponding to the preset cleaning area is positively related to the degree of dirt of the dust collector, that is, the degree of dirt of the dust collector is The greater the degree of contamination, the dirtier the preset cleaning area; when the amount of dirt inhaled by the vacuum cleaner is equal to the maximum amount of dirt of the vacuum cleaner, it can be determined that the preset cleaning area is very dirty, and it is more likely to complete the preset cleaning area. It is assumed that after cleaning the cleaning area, for example, after completing the vacuuming of the preset cleaning area, there is still dirt in the preset cleaning area that has not been sucked in by the dust collector.
在一些实施例方式中,可以根据拖擦件的脏污程度和/或吸尘件的脏污程度,确定预设清洁区域的脏污程度。In some embodiments, the degree of contamination of the preset cleaning area may be determined based on the degree of contamination of the mopping member and/or the degree of contamination of the vacuum suction member.
在一些实施方式中,通过基站或清洁设备上的脏污检测装置,如视觉传感器等获取清洁件的脏污程度,示例性的,拖擦件的颜色越深,拖擦件的脏污程度越大,吸尘件内部脏污距离吸尘件边缘越近,吸尘件的脏污程度越大;当然也不限于此,例如还可以通过清洁设备上搭载的且朝向拖擦件的视觉传感器获取拖擦件的脏污程度,或者,可以通过清洁设备上搭载的且朝向吸尘件内部的视觉传感器获取吸尘件的脏污程度,以确定清洁设备的清洁件的脏污程度。In some embodiments, the dirt level of the cleaning piece is obtained through a dirt detection device on the base station or cleaning equipment, such as a visual sensor. For example, the darker the color of the mopping piece, the greater the dirt level of the mopping piece. The closer the dirt inside the dust collector is to the edge of the dust collector, the greater the degree of dirt on the dust collector. Of course, it is not limited to this. For example, it can also be obtained through the visual sensor mounted on the cleaning equipment and facing the mop member. The degree of contamination of the mopping part, or the degree of contamination of the cleaning part of the cleaning device can be obtained through a visual sensor mounted on the cleaning device and facing the inside of the suction part to determine the degree of contamination of the cleaning part of the cleaning device.
示例性的,获取清洁件的脏污程度,包括:在对拖擦件进行清洗时,获取清洗拖擦件的污水的检测信息;根据检测信息确定拖擦件的脏污程度。可选的,脏污检测装置包括污水检测传感器,污水检测传感器用于检测清洁拖擦件后的污水,例如检测污水的浊度信息、色度信息、水导电率信息中的一种或多种。可通过污水的浊度值、污水的色度值或污水的水电导率确定从拖擦件上清洗下来的脏污量。例如当污水的浊度、色度或者水电导率越大时,表示清洁拖擦件后的污水越脏,从拖擦件上清洗下来的脏污量越大,即用于表征从拖擦件上清洗下来的脏污量的脏污洗脱值越大,可以确定清洁之前拖擦件上吸附的脏污量越大,即确定所述拖擦件的脏污程度越大。可以理解,污水的浊度值、污水的色度值、污水的水电导率都可用于表征从拖擦件上清洗下来的脏污量,即可以表征拖擦件的脏污程度,都与脏污洗脱值、脏污量或脏污程度正相关或有对应关系。例如,对第一次清洗拖布的污水检测得到的浊度值为1NTU,浊度值为1NTU对应的脏污洗脱值或脏污量为100,对第二次清洗拖布的污水检测得到的浊度值为2NTU,浊度值为2NTU的污水对应的脏污洗脱值或脏污量为200,则可以判断第一次从拖擦件上清洗下来的脏污的量小于第二次从拖擦件上清洗下来的脏污的量,即第一次清洁的拖擦件的脏污程度小于第二次清洁的拖擦件的脏污程度。污水的色度值、污水的水电导率与脏污洗脱值或脏污量的对应关系同理,在此不再赘述。同样可以理解,脏污程度可以由数值表征,如可以由污水的浊度值、污水的色度值、污水的水电导率、脏污量、脏污洗脱值中的任意一种数值表征,或脏污程度可以由为污水的浊度值、污水的色度值、污水的水电导率、脏污量、脏污洗脱值中的任意一种数值确定。例如,清洗拖擦件后的污水的浊度值为1NTU,则可表征拖擦件的脏污程度为1;或者清洗拖擦件后的污水的浊度值为1NTU对应的脏污程度为100,则拖擦件的脏污程度为100。For example, obtaining the degree of contamination of the cleaning part includes: when cleaning the mopping part, obtaining detection information of sewage used to clean the mopping part; and determining the degree of contamination of the mopping part based on the detection information. Optionally, the dirt detection device includes a sewage detection sensor. The sewage detection sensor is used to detect sewage after cleaning the mop piece, such as detecting one or more of the turbidity information, color information, and water conductivity information of the sewage. . The amount of dirt removed from the mop element can be determined by the turbidity value of the wastewater, the colorimetric value of the wastewater or the water conductivity of the wastewater. For example, when the turbidity, color or water conductivity of the sewage is greater, it means that the sewage after cleaning the mop parts is dirtier, and the amount of dirt cleaned from the mop parts is larger, which is used to indicate the amount of dirt removed from the mop parts. The greater the dirt elution value of the amount of dirt washed off, the greater the amount of dirt adsorbed on the mopping part before cleaning, that is, the greater the degree of dirt on the mopping part. It can be understood that the turbidity value of sewage, the chromaticity value of sewage, and the water conductivity of sewage can all be used to characterize the amount of dirt cleaned from the mop parts, that is, it can characterize the degree of dirt of the mop parts, and they are all related to the dirt. The dirt elution value, dirt amount or dirt degree are positively correlated or have a corresponding relationship. For example, the turbidity value detected for the sewage from cleaning the mop for the first time is 1 NTU, and the turbidity value corresponding to 1 NTU is 100. The turbidity value detected for the sewage from the second cleaning mop is 1 NTU. The dirt elution value or the amount of dirt corresponding to the sewage with a turbidity value of 2NTU and a turbidity value of 2NTU is 200. It can be judged that the amount of dirt cleaned from the mop part for the first time is less than that from the mop piece for the second time. The amount of dirt washed off the wiping parts, that is, the degree of dirt on the wiping parts cleaned for the first time is less than the dirtiness of the wiping parts cleaned for the second time. The corresponding relationship between the chromaticity value of sewage, the water conductivity of sewage and the dirt elution value or dirt amount is the same, and will not be repeated here. It can also be understood that the degree of contamination can be represented by a numerical value, such as by any of the turbidity value of the sewage, the chromaticity value of the sewage, the water conductivity of the sewage, the amount of dirt, and the dirt elution value. Or the degree of dirtiness can be determined by any one of the turbidity value of the sewage, the colorimetric value of the sewage, the water conductivity of the sewage, the amount of dirt, and the dirt elution value. For example, if the turbidity value of the sewage after cleaning the mop parts is 1 NTU, it can indicate that the degree of dirtiness of the mop parts is 1; or if the turbidity value of the sewage after cleaning the mop parts is 1 NTU, the corresponding degree of dirtiness is 100 , then the degree of dirtiness of the mopping part is 100.
举例而言,对所述拖擦件进行清洁时,可以间隔性的获取污水检测传感器的检测值,可以根据清洁所述拖擦件的时间和/或水量,对所述检测值对应的脏污量进行累加得到脏污量的累加结果,其中水量可以根据向清洗槽提供清洁用水的水量和/或排出的废水的水量确定。For example, when cleaning the mop member, the detection value of the sewage detection sensor can be obtained at intervals, and the dirt corresponding to the detection value can be calculated based on the time and/or the amount of water used to clean the mop member. The amount is accumulated to obtain an accumulated result of the amount of dirt, where the amount of water can be determined based on the amount of cleaning water provided to the cleaning tank and/or the amount of waste water discharged.
在一些实施方式中,两次地面清洁操作之间执行的拖擦件清洁操作可以作为一个拖擦件清洗任务。对所述拖擦件进行清洁的拖擦件清洗任务,例如包括在清洁一个预设清洁区域之后及在清洁另一个预设清洁区域之前对拖擦件进行清洁的过程,还可以包括结束清洁任务之后对拖擦件进行清洁的过程,其中,结束对所述清洁任务的条件为确定任务地图的所有区域的脏污值分别小于对应的脏污量阈值。In some embodiments, a mopping element cleaning operation performed between two floor cleaning operations can be used as a mopping element cleaning task. The cleaning task of cleaning the mopping element includes, for example, a process of cleaning the mopping element after cleaning a preset cleaning area and before cleaning another preset cleaning area, and may also include ending the cleaning task. There is then a process of cleaning the mopping parts, wherein the condition for ending the cleaning task is to determine that the dirt values of all areas of the task map are less than the corresponding dirt amount thresholds.
所述拖擦件清洗任务包括一个或多个阶段任务。在每个阶段任务,向基站的清洗槽或 直接向拖擦件清洗提供清洁用水以对拖擦件进行清洗,之后将清洁拖擦件后的污水排出清洗槽或回收到污水箱中,其中污水箱可以是设置于基站或清洁机器人上的污水箱,这个过程可以不循环或者可以循环多次;或者同时进行清洁用水供应对拖擦件清洗以及将清洁拖擦件后的污水排出或回收,当然也不限于此,例如向清洗槽提供清洁用水时,间歇性的将清洁拖擦件后的污水排出。The cleaning task of the mopping part includes one or more stage tasks. At each stage of the task, clean water is provided to the cleaning tank of the base station or directly to the cleaning of the mopping parts to clean the mopping parts, and then the sewage after cleaning the mopping parts is discharged from the cleaning tank or recycled into the sewage tank, in which the sewage The tank can be a sewage tank installed on the base station or the cleaning robot. This process does not need to be circulated or can be circulated multiple times; or at the same time, clean water is supplied to clean the mop parts and the sewage after cleaning the mop parts is discharged or recycled. Of course, It is not limited to this. For example, when cleaning water is provided to the cleaning tank, the sewage after cleaning the mop member is intermittently discharged.
不同阶段任务对应的清洁所述拖擦件的时间和/或水量可以相同也可以不同,根据拖擦件清洁任务中一个或多个阶段任务对应的时间和/或水量,对所述各阶段任务执行时获取的检测值对应的脏污量进行累加得到脏污量的累加结果
根据检测信息确定拖擦件的脏污程度,包括:根据清洁所述拖擦件的时间和/或水量,对所述检测信息对应的脏污量进行累加,其中水量可以根据向清洗槽提供清洁用水的水量和/或排出的废水的水量确定。可选的,可以将检测信息,如污水浊度直接作为脏污量,即浊度值为1NTU,则脏污量为1;根据所述脏污量的累加结果确定所述拖擦件的脏污程度。例如,所述脏污量的累加结果d可以根据清洁所述拖擦件的水量l,对污水浊度T的积分得到,表示如下:Determining the degree of dirt of the mopping part according to the detection information includes: accumulating the amount of dirt corresponding to the detection information according to the time and/or the amount of water used to clean the mopping part, wherein the amount of water can be based on the amount of water provided to the cleaning tank. The amount of water used is determined by the amount of water used and/or the amount of waste water discharged. Optionally, the detection information, such as sewage turbidity, can be directly used as the amount of dirt, that is, if the turbidity value is 1 NTU, the amount of dirt is 1; the dirt of the mop piece is determined based on the accumulated result of the amount of dirt. degree of contamination. For example, the cumulative result d of the dirt amount can be obtained by integrating the sewage turbidity T based on the amount of water l used to clean the mop member, and is expressed as follows:
d=∫T dld=∫T dl
在污水检测传感器存在检测水容量的限制和检测频率的限制时,可以根据一次或多次采样的检测信息,与采样间隔中的水量,确定所述脏污量的累加结果d,表示如下:When the sewage detection sensor has limitations on detection water capacity and detection frequency, the cumulative result d of the dirt amount can be determined based on the detection information of one or more samples and the water volume in the sampling interval, which is expressed as follows:
d=ΣTi×lid=ΣTi ×li
其中,Ti表示第i次采样的污水浊度T,li表示两次采样之间的水量,i为1、2、……、n中的任一数值,n为总采样次数。Among them,Ti represents the sewage turbidity T of the i-th sampling, li represents the water volume between two samplings, i is any value among 1, 2,..., n, and n is the total number of samplings.
举例而言,根据检测信息确定拖擦件的脏污程度,包括:根据单次所述检测信息预判所述拖擦件的拖擦件脏污程度。例如,在停止向清洗槽提供清洁用水之后,将污水排出,以及在污水排除过程中检测一次污水浊度,以及获取排出的污水的水量,该污水浊度与该水量的乘积可以确定为所述脏污量的累加结果d。当然也不限于此,例如可以在污水排除过程中多次检测污水浊度,将多个检测污水浊度的平均值、最大值、或最小值与该水量的乘积确定为所述脏污量的累加结果d。For example, determining the degree of contamination of the mopping element based on the detection information includes: predicting the degree of contamination of the mopping element based on the single detection information. For example, after stopping the supply of clean water to the cleaning tank, the sewage is discharged, and the sewage turbidity is detected once during the sewage discharge process, and the water volume of the discharged sewage is obtained. The product of the sewage turbidity and the water volume can be determined as The cumulative result of the amount of dirt d. Of course, it is not limited to this. For example, the turbidity of the sewage can be detected multiple times during the sewage removal process, and the product of the average, maximum, or minimum value of the multiple detected turbidities of the sewage and the amount of water is determined as the amount of dirt. Accumulated result d.
在一些实施方式中,根据清洁所述拖擦件的时间和/或水量,对所述检测信息对应的脏污量进行累加,所述脏污量的累加结果表示从拖擦件上清洗下来的脏污量,可以称为脏污洗脱值。In some embodiments, the amount of dirt corresponding to the detection information is accumulated according to the time and/or amount of water used to clean the mopping member, and the accumulated result of the amount of dirt represents the amount of dirt cleaned from the mopping member. The amount of dirt can be called the dirt elution value.
在一些实施方式中,可以根据所述拖擦件清洗任务中一个或多个阶段任务的脏污洗脱值,确定所述拖擦件清洗任务的脏污洗脱值;例如所述拖擦件清洗任务中所有阶段任务的脏污洗脱值累加得到所述拖擦件清洗任务的脏污洗脱值。In some embodiments, the dirt elution value of the mopping part cleaning task may be determined based on the dirt elution values of one or more stages of the mopping part cleaning task; for example, the mopping part cleaning task The dirt elution values of all stages of the cleaning task are accumulated to obtain the dirt elution value of the mopping part cleaning task.
在每个阶段任务中,可以只获取一次污水的检测信息,也可以多次获取污水的检测信息,根据一次或多次的检测信息确定所述阶段任务的脏污洗脱值,例如根据多次的检测信息的平均值与该任务阶段的水量的乘积确定该阶段任务的脏污洗脱值。In each stage task, the detection information of sewage can be obtained only once, or the detection information of sewage can be obtained multiple times, and the dirt elution value of the stage task is determined based on one or more detection information, for example, based on multiple detection information The product of the average value of the detection information and the water volume of the task stage determines the dirt elution value of the task in this stage.
示例性的,可以根据一个或多个阶段任务的脏污洗脱值,或者所述拖擦件清洗任务的脏污洗脱值,确定所述拖擦件的脏污程度。例如根据所述拖擦件清洗任务中第一个阶段任务的脏污洗脱值,确定所述拖擦件的脏污程度,如第一个阶段任务的脏污洗脱值越大则所述拖擦件脏污值越大;或者根据多个阶段任务的脏污洗脱值的最大值或平均值,确定所述拖擦件的脏污程度,所述最大值或平均值越大则所述拖擦件脏污值越大。For example, the degree of contamination of the mopping part may be determined based on the dirt elution value of one or more stage tasks, or the dirt elution value of the mopping part cleaning task. For example, the degree of dirt of the mopping part is determined based on the dirt elution value of the first stage task in the mopping part cleaning task. For example, the greater the dirt elution value of the first stage task, the greater the dirt elution value of the first stage task. The greater the dirtiness value of the mopping part; or the degree of dirtiness of the mopping part is determined based on the maximum or average value of the dirt elution values of multiple stages of tasks. The greater the maximum or average value, the greater the degree of dirtiness of the mopping part. The greater the dirtiness value of the mopping parts.
在一些实施方式中,在清洁设备例如通过拖擦件完成对预设清洁区域的拖擦之后,执行拖擦件清洗任务,以及将所述拖擦件清洗任务中所有阶段任务的脏污洗脱值累加得到所述 拖擦件清洗任务的脏污洗脱值,将所述拖擦件清洗任务的脏污洗脱值确定为所述预设清洁区域对应的脏污程度。In some embodiments, after the cleaning device completes mopping the preset cleaning area, for example, by using a mopping member, the mopping member cleaning task is performed, and the dirt in all stages of the mopping member cleaning task is washed away. The values are accumulated to obtain the dirt elution value of the mopping part cleaning task, and the dirt elution value of the mopping part cleaning task is determined as the degree of dirt corresponding to the preset cleaning area.
步骤S120、根据一个或至少两个预设清洁区域对应的脏污程度,生成清洁图像。Step S120: Generate a cleaning image according to the degree of dirt corresponding to one or at least two preset cleaning areas.
在一些实施方式中,根据预设清洁区域对应的脏污程度,生成清洁图像的步骤,还包括:确定脏污程度大于或等于预设脏污程度阈值的预设清洁区域;根据脏污程度大于或等于预设脏污程度阈值的预设清洁区域,生成清洁图像。举例而言,若在清洁设备对多个预设清洁区域进行清洁后,存在至少一个预设清洁区域的脏污程度小于预设脏污程度阈值,则可以在清洁图像中不对脏污程度小于预设脏污程度阈值的预设清洁区域进行显示,从而更直观地体现清洁设备对预设清洁区域的清洁效果。In some embodiments, the step of generating a cleaning image according to the degree of dirtiness corresponding to the preset cleaning area further includes: determining a preset cleaning area with a degree of dirtiness greater than or equal to a preset degree of dirtiness threshold; Or a preset clean area equal to the preset dirtiness threshold to generate a clean image. For example, if after the cleaning device cleans multiple preset cleaning areas, there is at least one preset cleaning area with a degree of contamination less than the preset contamination degree threshold, then the cleaning image may not contain the degree of contamination that is less than the preset degree of contamination. The preset cleaning area with a dirty degree threshold is displayed, so as to more intuitively reflect the cleaning effect of the cleaning equipment on the preset cleaning area.
可选的,可以在清洁设备完成对任务地图中的全部预设清洁区域完成清洁后,生成清洁图像,也可以在清洁设备完成对任务地图中的至少一个预设清洁区域的一次清洁之后,生成清洁图像,在此不作限制。示例性的,清洁图像包括预设清洁区域对应的图像区域。Optionally, the cleaning image may be generated after the cleaning equipment completes cleaning of all preset cleaning areas in the task map, or may be generated after the cleaning equipment completes one cleaning of at least one preset cleaning area in the task map. Clean images are not limited here. For example, the cleaning image includes an image area corresponding to a preset cleaning area.
举例而言,根据预设清洁区域对应的脏污程度,生成清洁图像,包括:根据预设清洁区域对应的脏污程度所在值域范围确定图像区域的目标填充图示;根据目标填充图示对图像区域进行标识,其中,不同的值域范围对应的目标填充图示也不同。For example, generating a clean image based on the degree of dirt corresponding to the preset cleaning area includes: determining the target filling icon of the image area according to the value range of the degree of dirt corresponding to the preset cleaning area; and determining the target filling icon according to the target filling icon. The image area is marked, and the target filling icons corresponding to different value ranges are also different.
可选的,目标填充图示可以包括色彩、线条、阴影、图案、数值或其他填充图示中的至少一种。举例而言,目标填充图示可以是预先设置的,也可以是用户自行设置的,在此不做限制。可以理解的,目标填充图示可以进行相应的扩展。Optionally, the target fill icon may include at least one of color, line, shadow, pattern, numerical value or other fill icon. For example, the target filling icon may be preset or may be set by the user, which is not limited here. It will be understood that the target fill icon can be expanded accordingly.
在一些实施方式中,判断预设清洁区域对应的脏污程度所在的值域范围,并根据预设清洁区域对应的脏污程度所在的值域范围确定图像区域的目标填充图示,例如,预设清洁区域对应的脏污程度越高,目标填充图示中的色彩越深;预设清洁区域对应的脏污程度越高,目标填充图示中的线条越密集;预设清洁区域对应的脏污程度越高,目标填充图示中的阴影越深;预设清洁区域对应的脏污程度越高,目标填充图示中的图案越密集;预设清洁区域对应的脏污程度越高,目标填充图示中的数值越大。依此类推,还可以对其他填充图示进行拓展,其他填充图示例如为文字,在此不做限制。In some embodiments, the value range of the degree of contamination corresponding to the preset clean area is determined, and the target filling icon of the image area is determined based on the value range of the degree of contamination corresponding to the preset clean area. For example, the preset It is assumed that the higher the degree of dirt corresponding to the clean area, the darker the color in the target fill icon; the higher the degree of dirt corresponding to the preset clean area, the denser the lines in the target fill icon; the darker the color corresponding to the preset clean area. The higher the degree of dirt, the darker the shadow in the target fill icon; the higher the degree of dirt corresponding to the preset clean area, the denser the pattern in the target fill icon; the higher the degree of dirt corresponding to the preset clean area, the denser the pattern in the target fill icon. The larger the value in the fill icon. By analogy, other filled icons can also be expanded. Other filled icons may be text, for example, and are not limited here.
在一些实施方式中,根据预设清洁区域对应的脏污程度所在值域范围确定所述图像区域的目标填充图示,包括:当所述预设清洁区域被清洁的次数大于1次时,根据所述预设清洁区域对应的至少一个所述脏污程度所在的值域范围,确定所述预设区域对应的所述图像区域的目标填充图示。In some embodiments, determining the target filling diagram of the image area according to the value range of the degree of dirt corresponding to the preset cleaning area includes: when the number of times the preset cleaning area is cleaned is greater than 1 time, according to The value range of at least one degree of dirt corresponding to the preset cleaning area determines the target filling diagram of the image area corresponding to the preset area.
示例性的,在清洁机器人对预设清洁区域进行一次清洁后,即可获取一个预设清洁区域对应的脏污程度,当一个预设清洁区域的被清洁的次数不止1次时,可以在每次预设清洁区域被清洁后即获取相应的脏污程度。例如预设清洁区域被清洁了5次,每清洁一次后会获取一个脏污程度,即获取了5个脏污程度,预设区域对应的图像区域的目标填充图示由5个脏污程度中的任一个确定,或由5个脏污程度中的至少2个累计值确定。当然还可以是,预设清洁区域被清洁了5次,仅在其中2次清洁后获取脏污程度,如获取了2个脏污程度,预设区域对应的图像区域的目标填充图示由2个脏污程度中的任一个确定,或由2个脏污程度的累计值确定。示例性的,当首次清洁后获取了脏污程度,可以根据预设清洁区域对应的脏污程度,预判该预设清洁区域的剩余清洁次数,例如剩余清洁次数为4次,当该清洁区域预判的剩余清洁次数大于1次时,可以仅获取其中几次清洁后预设清洁区域的脏污程度,生成清洁图像。For example, after the cleaning robot cleans the preset cleaning area once, the degree of dirt corresponding to the preset cleaning area can be obtained. When a preset cleaning area is cleaned more than once, the degree of contamination corresponding to the preset cleaning area can be obtained every time. After the preset cleaning area is cleaned, the corresponding degree of dirt is obtained. For example, the preset cleaning area has been cleaned 5 times. After each cleaning, a degree of dirtiness will be obtained, that is, 5 degrees of dirtiness are obtained. The target filling icon of the image area corresponding to the preset area is divided into 5 degrees of dirtiness. Determined by any one of , or by the cumulative value of at least 2 of the 5 soiling levels. Of course, it can also be that the preset cleaning area has been cleaned 5 times, and the dirtiness level is obtained only after 2 cleanings. For example, 2 dirtiness levels are obtained, and the target filling icon of the image area corresponding to the preset area is represented by 2 Determined by any one of two soiling levels, or by the cumulative value of 2 soiling levels. For example, when the degree of contamination is obtained after the first cleaning, the remaining cleaning times of the preset cleaning area can be predicted based on the degree of contamination corresponding to the preset cleaning area. For example, the remaining number of cleanings is 4 times. When the cleaning area is When the estimated number of remaining cleanings is greater than one, the degree of dirtiness of the preset cleaning area after only a few cleanings can be obtained to generate a cleaning image.
示例性的,也可以根据实际清洁次数,获取每一次清洁对应的预设清洁区域的脏污程度,并根据每一次清洁对应的预设清洁区域的脏污程度,生成清洁图像。For example, the degree of contamination of the preset cleaning area corresponding to each cleaning may also be obtained based on the actual number of cleanings, and a cleaning image may be generated based on the degree of contamination of the preset cleaning area corresponding to each cleaning.
在一些实施方式中,根据预设清洁区域对应的脏污程度,生成清洁图像,包括:根据第一目标预设清洁区域对应的脏污程度,生成第一清洁图像,其中,第一目标预设清洁区域为至少两个预设清洁区域中的一个预设清洁区域,第一清洁图像包含所有的所述预设区域对 应的图像区域,且至少所述第一目标预设清洁区域对应的图像区域标识有目标填充图示,所述目标填充图示根据最近一次获取的所述第一目标预设清洁区域对应的脏污程度确定。In some embodiments, generating a cleaning image according to a degree of dirt corresponding to a preset cleaning area includes: generating a first cleaning image according to a degree of dirt corresponding to a first target preset cleaning area, wherein the first target preset The cleaning area is one preset cleaning area among at least two preset cleaning areas, the first cleaning image includes all image areas corresponding to the preset areas, and at least the image area corresponding to the first target preset cleaning area A target filling icon is identified, and the target filling icon is determined according to the degree of dirt corresponding to the most recently obtained first target preset cleaning area.
可选的,处理方法还包括:非第一目标预设清洁区域对应的图像区域不标识目标填充图示;或非第一目标预设清洁区域对应的图像区域标识预设的目标填充图示;或非第一目标预设清洁区域对应的图像区域的目标填充图示根据最近一次获取的非第一目标预设清洁区域对应的脏污程度确定;其中,非第一目标预设清洁区域为除所述第一目标预设清洁区域之外的预设清洁区域。Optionally, the processing method further includes: the image area corresponding to the non-first target preset cleaning area does not identify the target filling icon; or the image area corresponding to the non-first target preset cleaning area identifies the preset target filling icon; Or the target filling icon of the image area corresponding to the non-first target preset cleaning area is determined according to the degree of dirt corresponding to the most recently acquired non-first target preset cleaning area; wherein the non-first target preset cleaning area is except A preset cleaning area outside the first target preset cleaning area.
示例性的,当清洁设备在执行清洁任务时,清洁设备按照A1-A2-A3-A4的清洁顺序对各预设清洁区域A1、A2、A3、A4进行清洁,当然各预设清洁区域的清洁顺序也不限于此,以下以A1-A2-A3-A4的清洁顺序进行说明。请参阅图29,各预设清洁区域与清洁图像中的图像区域一一对应,如,预设清洁区域A1对应于图像区域a1,预设清洁区域A2对应于图像区域a2,以此类推。请参阅图30,清洁设备首先对预设清洁区域A1进行了一次清洁,则可以根据预设清洁区域A1对应的脏污程度,生成一张第一清洁图像a,如图30(a)所示,此时第一目标清洁区域为预设清洁区域A1,第一清洁图像a包含所有预设清洁区域A1-A4对应的图像区域a1-a4,且预设清洁区域A1对应的图像区域a1有颜色填充,图像区域a1填充的颜色由预设清洁区域A1对应的脏污程度确定,除了预设清洁区域A1之外的非第一目标清洁区域A2-A4对应的图像区域a2-a4不标识目标填充图示;若完成预设清洁区域A1的清洁后,清洁设备继续对预设清洁区域A2进行了一次清洁,则可以根据预设清洁区域A2对应的脏污程度,生成一张第一清洁图像b,如图30(b)所示,此时第一目标清洁区域为预设清洁区域A2,第一清洁图像b包含所有预设清洁区域A1-A4对应的图像区域a1-a4,预设清洁区域A1对应的图像区域a1有颜色填充,预设清洁区域A2对应的图像区域a2有颜色填充,图像区域a1填充的颜色由前一次获取的预设清洁区域A1对应的脏污程度确定,即第一清洁图像b中的图像区域a1填充的颜色跟第一清洁图像a中图像区域a1填充的颜色相同,图像区域a2填充的颜色由预设清洁区域A2对应的脏污程度确定,A3、A4对应的图像区域a3、a4不标识目标填充图示。当然,第一清洁图像a和第一清洁图像b中的非第一目标区域对应的图像区域可以不标识任何目标填充图示,也可以标识预设的标填充图示,在此不做限定。在图30的示例中,第一清洁图像b中保留第一清洁图像a中预设清洁区域A1对应的图像区域a1标识的目标填充图示,预设清洁区域A1与预设清洁区域A2为任务地图中的不同预设清洁区域,预设清洁区域A2对应的脏污程度并不会影响预设清洁区域A1对应的脏污程度,因此第一清洁图像b中,图像区域a2标识的目标填充图示不会影响图像区域a1标识的目标填充图示,第一清洁图像b中图像区域a1标识的目标填充图示与第一清洁图像a中图像区域a1标识的目标填充图示相同。依此类推,若清洁设备继续对预设清洁区域A3进行了一次清洁,则可以根据预设清洁区域A3对应的脏污程度,生成一张第一清洁图像c,如图30(c)所示,以及,若清洁设备继续对预设清洁区域A4进行了一次清洁,则可以根据预设清洁区域A4对应的脏污程度,生成一张第一清洁图像d,如图30(d)所示。For example, when the cleaning equipment performs a cleaning task, the cleaning equipment cleans each preset cleaning area A1, A2, A3, and A4 in the cleaning order of A1-A2-A3-A4. Of course, the cleaning of each preset cleaning area The order is not limited to this. The cleaning order of A1-A2-A3-A4 will be explained below. Referring to Figure 29, each preset cleaning area corresponds to the image area in the clean image one-to-one. For example, the preset cleaning area A1 corresponds to the image area a1, the preset cleaning area A2 corresponds to the image area a2, and so on. Please refer to Figure 30. The cleaning equipment first cleans the preset cleaning area A1. Then it can generate a first cleaning image a according to the degree of dirt corresponding to the preset cleaning area A1, as shown in Figure 30(a). ,At this time, the first target cleaning area is the preset cleaning area A1, the first cleaning image a includes all image areas a1-a4 corresponding to the preset cleaning areas A1-A4, and the image area a1 corresponding to the preset cleaning area A1 has color Filling, the color of the filling of the image area a1 is determined by the degree of dirt corresponding to the preset cleaning area A1. In addition to the preset cleaning area A1, the image areas a2-a4 corresponding to the non-first target cleaning areas A2-A4 do not identify the target filling. As shown in the figure; if after completing the cleaning of the preset cleaning area A1, the cleaning equipment continues to clean the preset cleaning area A2, a first cleaning image b can be generated according to the degree of dirt corresponding to the preset cleaning area A2. , as shown in Figure 30(b), at this time, the first target cleaning area is the preset cleaning area A2, and the first cleaning image b includes all image areas a1-a4 corresponding to the preset cleaning areas A1-A4. The preset cleaning area The image area a1 corresponding to A1 is filled with color, and the image area a2 corresponding to the preset cleaning area A2 is filled with color. The color filled in the image area a1 is determined by the degree of dirt corresponding to the preset cleaning area A1 obtained last time, that is, the first The color filled in the image area a1 in the clean image b is the same as the color filled in the image area a1 in the first clean image a. The color filled in the image area a2 is determined by the degree of dirt corresponding to the preset cleaning area A2. The corresponding colors of A3 and A4 are Image areas a3 and a4 do not identify target filling icons. Of course, the image areas corresponding to the non-first target areas in the first cleaning image a and the first cleaning image b may not be marked with any target filling icon, or may be marked with a preset marked filling icon, which is not limited here. In the example of FIG. 30 , the first cleaning image b retains the target filling icon identified by the image area a1 corresponding to the preset cleaning area A1 in the first cleaning image a, and the preset cleaning area A1 and the preset cleaning area A2 are tasks. For different preset cleaning areas in the map, the degree of dirtiness corresponding to the preset cleaning area A2 will not affect the degree of dirtiness corresponding to the preset cleaning area A1. Therefore, in the first cleaning image b, the target filling map identified by the image area a2 means that it will not affect the target fill pattern identified in the image area a1. The target fill pattern identified in the image area a1 in the first cleaning image b is the same as the target fill pattern identified in the image area a1 in the first cleaning image a. By analogy, if the cleaning equipment continues to clean the preset cleaning area A3, a first cleaning image c can be generated according to the degree of dirt corresponding to the preset cleaning area A3, as shown in Figure 30(c) , and, if the cleaning equipment continues to clean the preset cleaning area A4, a first cleaning image d can be generated according to the degree of dirt corresponding to the preset cleaning area A4, as shown in Figure 30(d).
在一些实施方式中,获取到所述第一目标预设清洁区域对应的脏污程度即生成第一清洁图像,即每完成一次对一个预设清洁区域的清洁(即每完成一次脏污检测)就显示一张第一清洁图像,例如,将第一清洁图像a、第一清洁图像b、第一清洁图像c、第一清洁图像d分别在预设清洁区域A1、A2、A3、A4各完成一次清洁后即显示;在一些实施方式中,在完成清洁任务后生成一张第一清洁图像,例如,在完成清洁任务后只显示一张第一清洁图像,如通过点击屏幕中的标签对相应的第一清洁图像进行选择性显示,如图31所示,用户可以通过点击屏幕中的任意一个标签如图31中的数字1至数字5所示,选择显示第一清洁图像a-d中的任意一张;在一些实施方式中,在完成清洁任务后依次或同时生成至少两张第一清洁图像,例如,在完成清洁任务后依次或同时显示至少两张第一清洁图像,在完成清洁任务后,用户可以通过点击屏幕中的至少两个标签,如图31中的数字1至数字5所示,对相应 的第一清洁图像进行选择性显示,或者如图32所示,用户可以通过点击屏幕中的图标“清洁图像”使得多张第一清洁图像可以依次显示,或者如图33所示,通过点击屏幕中的图标在屏幕中显示多张第一清洁图像。从而可以根据至少一张第一清洁图像体现清洁设备的清洁过程,例如可以体现清洁设备对各个预设清洁区域的实际清洁顺序以及每个预设清洁区域对应的脏污程度,例如图30中的第一清洁图像a体现了清洁设备首先开始清洁预设清洁区域A1、通过图像区域a1标识的目标填充图示体现预设清洁区域A1在清洁之前的脏污程度、清洁设备当次对预设清洁区域A1清洁的脏污量。In some embodiments, the first cleaning image is generated when the degree of dirt corresponding to the first target preset cleaning area is obtained, that is, every time a cleaning of a preset cleaning area is completed (that is, every time a dirt detection is completed) A first cleaning image is displayed. For example, the first cleaning image a, the first cleaning image b, the first cleaning image c, and the first cleaning image d are respectively completed in the preset cleaning areas A1, A2, A3, and A4. It is displayed after one cleaning; in some embodiments, a first cleaning image is generated after completing the cleaning task. For example, only a first cleaning image is displayed after completing the cleaning task, such as by clicking on the corresponding label in the screen. The first cleaning image is selectively displayed, as shown in Figure 31. The user can select to display any one of the first cleaning images a-d by clicking any label on the screen as shown in
示例性的,当清洁设备在执行清洁任务时,清洁设备按照A1-A2-A3-A4的清洁顺序对各预设清洁区域A1、A2、A3、A4进行清洁,当然各预设清洁区域的清洁顺序也不限于此,以下以A1-A2-A3-A4的清洁顺序进行说明。请参阅图34,清洁设备首先对预设清洁区域A1一次清洁,则可以根据清洁设备对预设清洁区域A1进行了该次清洁之后,获得的预设清洁区域A1对应的脏污程度,生成一张第一清洁图像a,如图34(a)所示,此时预设清洁区域A1为第一目标清洁区域,第一清洁图像a包含所有预设清洁区域A1-A4对应的图像区域a1-a4,且预设清洁区域A1对应的图像区域a1有颜色填充,图像区域a1填充的颜色由预设清洁区域A1对应的脏污程度确定;若完成预设清洁区域A1的本次清洁后,清洁设备还需要继续对预设清洁区域A1进行第二次清洁,此时预设清洁区域A1仍为第一目标清洁区域,则可以根据第二次清洁后预设清洁区域A1对应的脏污程度,生成一张第一清洁图像b,如图34(b)所示,第一清洁图像b包含所有预设清洁区域A1-A4对应的图像区域a1-a4,预设清洁区域A1对应的图像区域a1填充的颜色由第二次获取的预设清洁区域A1对应的脏污程度确定。依次类推,若完成预设清洁区域A1的第二次清洁后,清洁设备还需要继续对对预设清洁区域A1进行第三次清洁,根据第三次获取的预设清洁区域A1对应的脏污程度,生成一张第一清洁图像c,如图34(c)所示,直至预设清洁区域A1对应的脏污程度低于预设脏污程度阈值,然后再对其他预设清洁区域进行清洁并生成其他第一清洁图像。如此,可以根据至少一张第一清洁图像体现清洁设备对一个预设清洁区域的清洁过程,例如清洁设备对预设清洁区域的清洁次数以及对该预设清洁区域多次清洁之后该预设清洁区域的清洁效果的变化,例如图34中的第一清洁图像a和第一清洁图像b,可以体现预设清洁区域A1经过了2次清洁,以及通过图像清洁区域a1的标识的目标填充图示的变化体现预设清洁区域A1的清洁效果的变化。在一些实施方式中,若清洁设备完成对一个预设清洁区域的清洁,即该预设清洁区域对应的脏污程度低于预设脏污程度阈值后,清洁设备继续对其它预设清洁区域进行清洁,并根据其它预设清洁区域对应的脏污程度,生成至少一张第一清洁图像。例如,清洁设备在完成对预设清洁区域A1的三次清洁之后,预设清洁区域A1对应的脏污程度低于预设脏污程度阈值,清洁设备继续对预设清洁区域A2进行清洁,此时预设清洁区域A2为第一目标清洁区域,可以根据预设清洁区域A2的脏污程度生成第一清洁图像d,如图34(d)所示,依此类推,根据清洁设备对预设清洁区域A3以及预设清洁区域A4的脏污程度分别生成至少一张第一清洁图像,从而可以根据至少一张第一清洁图像体现清洁设备的清洁过程,例如清洁设备对各个预设清洁区域的清洁次数、每个预设清洁区域每一次清洁之后对应的脏污程度的变化以及清洁设备对预设清洁区域的清洁顺序。示例性的,生成第一清洁图像a-c时,预设清洁区域A2-A4为非第一目标区域,预设清洁区域A2-A4对应的图像区域a2-a4不标识目标填充图示,以指示预设清洁区域A2-A4未进行清洁;生成第一清洁图像d时,预设清洁区域A1为非第一目标区域,预设清洁区域A1对应的图像区域a1填充的目标填充图示与第一清洁图像c中的图像区域a1填充的目标填充图示相同,以指示预设清洁区域A1未再进行清洁。当然,第一清洁图像a-c中的图像区域a2-a4还可以标识预设的目标填充图示,以指示预设清洁区域A2-A4未进行清洁,第一清洁图像d中的图像区域a1可以不标识目标填充图示或标识预设的目标填充图示,以指示预设清洁区域A1未再进行清洁,在此不做赘述。For example, when the cleaning equipment performs a cleaning task, the cleaning equipment cleans each preset cleaning area A1, A2, A3, and A4 in the cleaning order of A1-A2-A3-A4. Of course, the cleaning of each preset cleaning area The order is not limited to this. The cleaning order of A1-A2-A3-A4 will be explained below. Referring to Figure 34, the cleaning equipment first cleans the preset cleaning area A1 once. Then, based on the degree of dirt corresponding to the preset cleaning area A1 obtained by the cleaning equipment after cleaning the preset cleaning area A1, a A first cleaning image a, as shown in Figure 34(a). At this time, the preset cleaning area A1 is the first target cleaning area, and the first cleaning image a includes all image areas a1- corresponding to the preset cleaning areas A1-A4. a4, and the image area a1 corresponding to the preset cleaning area A1 is filled with color. The color filled in the image area a1 is determined by the degree of dirt corresponding to the preset cleaning area A1; if this cleaning of the preset cleaning area A1 is completed, the cleaning The equipment also needs to continue to clean the preset cleaning area A1 for the second time. At this time, the preset cleaning area A1 is still the first target cleaning area. According to the degree of dirt corresponding to the preset cleaning area A1 after the second cleaning, Generate a first cleaning image b, as shown in Figure 34(b). The first cleaning image b contains all image areas a1-a4 corresponding to the preset cleaning areas A1-A4, and the image area a1 corresponding to the preset cleaning area A1 The color of the filling is determined by the degree of dirt corresponding to the preset cleaning area A1 obtained for the second time. By analogy, after completing the second cleaning of the preset cleaning area A1, the cleaning equipment needs to continue to clean the preset cleaning area A1 for the third time. According to the dirt corresponding to the preset cleaning area A1 obtained for the third time, degree, generate a first cleaning image c, as shown in Figure 34(c), until the degree of dirt corresponding to the preset cleaning area A1 is lower than the preset degree of dirt threshold, and then clean other preset cleaning areas. and generate other first clean images. In this way, the cleaning process of a preset cleaning area by the cleaning equipment can be reflected based on at least one first cleaning image, such as the number of times the cleaning equipment cleans the preset cleaning area and the preset cleaning after multiple cleanings of the preset cleaning area. The changes in the cleaning effect of the area, such as the first cleaning image a and the first cleaning image b in Figure 34, can reflect that the preset cleaning area A1 has been cleaned twice, and the target filling diagram is marked by the image cleaning area a1. The change reflects the change in the cleaning effect of the preset cleaning area A1. In some embodiments, if the cleaning equipment completes cleaning a preset cleaning area, that is, after the degree of dirt corresponding to the preset cleaning area is lower than the preset dirt level threshold, the cleaning equipment continues to clean other preset cleaning areas. Clean, and generate at least one first cleaning image according to the degree of dirt corresponding to other preset cleaning areas. For example, after the cleaning equipment completes three cleanings of the preset cleaning area A1, the degree of dirt corresponding to the preset cleaning area A1 is lower than the preset dirt level threshold, and the cleaning equipment continues to clean the preset cleaning area A2. At this time The preset cleaning area A2 is the first target cleaning area, and the first cleaning image d can be generated according to the degree of dirt of the preset cleaning area A2, as shown in Figure 34(d), and so on, according to the cleaning equipment. The degree of contamination of the area A3 and the preset cleaning area A4 respectively generates at least one first cleaning image, so that the cleaning process of the cleaning equipment can be reflected based on the at least one first cleaning image, such as the cleaning of each preset cleaning area by the cleaning equipment. times, changes in the corresponding degree of dirtiness after each cleaning of each preset cleaning area, and the cleaning sequence of the preset cleaning areas by the cleaning equipment. Exemplarily, when generating the first cleaning images a-c, the preset cleaning areas A2-A4 are non-first target areas, and the image areas a2-a4 corresponding to the preset cleaning areas A2-A4 do not identify target filling icons to indicate the preset cleaning areas A2-A4. Assume that the cleaning areas A2-A4 are not cleaned; when generating the first cleaning image d, the preset cleaning area A1 is a non-first target area, and the target filling icon filled in the image area a1 corresponding to the preset cleaning area A1 is the same as the first cleaning The image area a1 in image c has the same target filling icon to indicate that the preset cleaning area A1 is no longer cleaned. Of course, the image areas a2-a4 in the first cleaning images a-c may also identify preset target filling icons to indicate that the preset cleaning areas A2-A4 are not cleaned, and the image area a1 in the first cleaning image d may not be cleaned. The target filling icon or the preset target filling icon is marked to indicate that the preset cleaning area A1 is no longer cleaned, which will not be described in detail here.
在一些实施方式中,获取到所述第一目标预设清洁区域对应的脏污程度即生成第一清 洁图像,即每完成一次对一个预设清洁区域的清洁(即每完成一次脏污检测)就显示一张第一清洁图像,例如,将第一清洁图像a、第一清洁图像b、第一清洁图像c、第一清洁图像d分别在预设清洁区域A1、A2分别每完成一次清洁后即显示;在一些实施方式中,还可在完成清洁任务后依次或同时生成至少两张第一清洁图像,即在完成清洁任务后依次或同时显示多张第一清洁图像,例如,如图35所示,在完成清洁任务后,用户可以通过点击屏幕中的标签如图35中的数字1至数字5,对相应的第一清洁图像进行选择性的显示,或者如图36所示,用户可以通过点击屏幕中的图标“清洁图像”使得多张第一清洁图像可以依次显示,或者如图37所示,通过点击屏幕中的图标在屏幕中显示多张第一清洁图像。In some embodiments, the first cleaning image is generated when the degree of dirt corresponding to the first target preset cleaning area is obtained, that is, every time a cleaning of a preset cleaning area is completed (that is, every time a dirt detection is completed) A first cleaning image is displayed. For example, the first cleaning image a, the first cleaning image b, the first cleaning image c, and the first cleaning image d are respectively placed in the preset cleaning areas A1 and A2 after each cleaning is completed. That is, display; in some embodiments, at least two first cleaning images can be generated sequentially or simultaneously after the cleaning task is completed, that is, multiple first cleaning images are displayed sequentially or simultaneously after the cleaning task is completed, for example, as shown in Figure 35 As shown in Figure 35, after completing the cleaning task, the user can selectively display the corresponding first cleaning image by clicking on the labels on the screen,
可选地,根据至少一张第一清洁图像,生成动画或短视频。举例而言,随着动画或短视频的播放动态展示至少一张第一清洁图像,或者,通过动画或短视频展示多张第一清洁图像对应的预设清洁区域的变化过程。Optionally, generate animation or short video based on at least one first cleaning image. For example, at least one first cleaning image is dynamically displayed as the animation or short video plays, or the changing process of the preset cleaning area corresponding to multiple first cleaning images is displayed through the animation or short video.
示例性的,可以通过动画或短视频依次展示多张第一清洁图像a-d;也可以通过动画或短视频显示随着时间的推移,图像区域a1、图像区域a2、图像区域a3以及图像区域a4标识的目标填充图示依次发生变化,其中,各图像区域标识的目标填充图示根据各预设清洁区域对应的脏污程度确定,从而可以通过动画或短视频显示清洁设备的清洁过程,例如清洁设备对各个预设清洁区域的实际清洁顺序以及每个预设清洁区域清洁之后对应的脏污程度,例如第一清洁图像a-d的依次显示,体现了清洁设备对预设清洁区域的清洁顺序是按照A1-A2-A3-A4的顺序对各预设清洁区域A1、A2、A3、A4进行清洁,还可以通过第一清洁图像a-d中各图像区域a1-a4标识的目标填充图示的变化体现预设清洁区域A1-A4的清洁效果的变化,进而有利于用户了解清洁设备的清洁过程,以及清洁过程中预设清洁区域的脏污程度。For example, multiple first cleaning images a-d can be displayed in sequence through animation or short videos; the images of image area a1, image area a2, image area a3, and image area a4 can also be displayed over time through animation or short video. The target filling icons change sequentially, in which the target filling icons identified in each image area are determined according to the degree of dirt corresponding to each preset cleaning area, so that the cleaning process of the cleaning equipment can be displayed through animation or short video, such as cleaning equipment The actual cleaning sequence of each preset cleaning area and the corresponding degree of dirt after each preset cleaning area is cleaned. For example, the sequential display of the first cleaning images a-d reflects that the cleaning order of the preset cleaning area by the cleaning equipment is in accordance with A1 -Clean each preset cleaning area A1, A2, A3, A4 in the order of A2-A3-A4, and the preset can also be reflected by changes in the target filling icons identified in each image area a1-a4 in the first cleaning image a-d. The changes in the cleaning effect of the cleaning areas A1-A4 will help the user understand the cleaning process of the cleaning equipment and the degree of dirtiness of the preset cleaning area during the cleaning process.
示例性的,可以通过动画或短视频依次展示多张第一清洁图像;也可以通过动画或短视频显示随着时间的推移图像区域a1标识的目标填充图示的变化,以及图像区域a2标识的目标填充图示的变化,其中,各图像区域标识的目标填充图示根据各预设清洁区域对应的脏污程度确定,从而可以通过动画或短视频显示各预设清洁区域的清洁过程,例如清洁设备对预设清洁区域的清洁次数、每个预设清洁区域每一次清洁之后对应的脏污程度的变化以及清洁设备对预设清洁区域的清洁顺序,进而有利于用户了解清洁设备的清洁过程,以及预设清洁区域在清洁设备的多次清洁之后逐渐变干净的过程。For example, multiple first cleaning images can be displayed in sequence through animation or short videos; changes over time in the target filling icon identified in image area a1, and changes in the target filling icon identified in image area a2 can also be displayed through animation or short videos. Changes in the target filling icon, where the target filling icon identified in each image area is determined according to the degree of dirt corresponding to each preset cleaning area, so that the cleaning process of each preset cleaning area can be displayed through animation or short video, such as cleaning The number of times the equipment cleans the preset cleaning areas, the change in the degree of dirtiness after each cleaning of each preset cleaning area, and the cleaning sequence of the preset cleaning areas by the cleaning equipment, which will help users understand the cleaning process of the cleaning equipment. and the process by which a preset cleaning area gradually becomes cleaner after multiple cleanings of the cleaning equipment.
在一些实施方式中,动画或短视频可以是在清洁设备的清洁过程中实时生成并显示,也可以是在清洁设备的清洁过程结束后生成并显示,以对清洁设备的清洁过程进行复现,在此不做限制。In some embodiments, the animation or short video can be generated and displayed in real time during the cleaning process of the cleaning equipment, or can be generated and displayed after the cleaning process of the cleaning equipment is completed to reproduce the cleaning process of the cleaning equipment. There are no restrictions here.
可选的,根据预设清洁区域对应的脏污程度,生成清洁图像,包括:确定至少一个第二目标预设清洁区域,所述第二目标预设清洁区域为已被清洁过i次的所述预设清洁区域,其中,i为大于等于1的整数;根据至少一个目标脏污程度,生成第i张第二清洁图像,其中,所述目标脏污程度为所述第二目标预设清洁区域第i次清洁后获取的所述第二目标预设清洁区域对应的所述脏污程度,所述第i张第二清洁图像包括所有所述预设区域对应的图像区域,且每个所述第二目标预设清洁区域对应的图像区域分别标识有目标填充图示,每个所述第二目标预设清洁区域对应的所述图像区域标识的目标填充图示分别根据第i次获取的各所述第二目标预设清洁区域对应的所述目标脏污程度确定。Optionally, generating a cleaning image according to the degree of dirt corresponding to the preset cleaning area includes: determining at least one second target preset cleaning area, where the second target preset cleaning area is all areas that have been cleaned i times. The preset cleaning area, where i is an integer greater than or equal to 1; generate the i-th second cleaning image according to at least one target degree of dirtiness, wherein the target degree of dirtiness is the second target preset cleaning The degree of dirt corresponding to the second target preset cleaning area obtained after the i-th cleaning of the area, the i-th second cleaning image includes all image areas corresponding to the preset areas, and each The image area corresponding to the second target preset cleaning area is respectively marked with a target filling icon, and the target filling icon corresponding to the image area identification corresponding to each second target preset cleaning area is respectively obtained according to the i-th The target degree of contamination corresponding to each of the second target preset cleaning areas is determined.
可选的,处理方法还包括:非第二目标预设清洁区域对应的图像区域不标识目标填充图示;或非第二目标预设清洁区域对应的图像区域标识标识预设的目标填充图示;或非第二目标预设清洁区域对应的图像区域标识的目标填充图示根据最近一次获取的非第二目标预设清洁区域对应的脏污程度确定;其中,非第二目标预设清洁区域为除所述第二目标预设清洁区域之外的预设清洁区域。Optionally, the processing method also includes: the image area corresponding to the non-second target preset cleaning area does not identify the target filling icon; or the image area corresponding to the non-second target preset cleaning area identifies the preset target filling icon. ; Or the target filling icon of the image area identification corresponding to the non-second target preset cleaning area is determined based on the degree of dirt corresponding to the most recently obtained non-second target preset cleaning area; wherein, the non-second target preset cleaning area A preset cleaning area other than the second target preset cleaning area.
示例性的,请参阅图38和图39,当清洁设备完成清洁任务时,若清洁设备累计对预设 清洁区域A1进行了3次清洁,对预设清洁区域A2进行了3次清洁,对预设清洁区域A3进行了1次清洁,以及对预设清洁区域A4进行了2次清洁,则可以根据所有已被清洁1次的预设清洁区域分别对应的目标脏污程度,如预设清洁区域A1-A4各自被清洁1次后分别获取到的对应的脏污程度,生成第1张第二清洁图像,如第二清洁图像a,如图38(a)或图39(a)所示,第二清洁图像a包括所有所述预设区域A1-A4对应的图像区域a1-a4,且每个图像区域a1-a4分别标识有目标填充图示,每个图像区域a1-a4标识的目标填充图示分别根据预设清洁区域A1-A4各自对应的标脏污程度确定,以指示预设清洁区域A1-A4分别被清洁1次之前的脏污程度;同样的,可以根据所有已被清洁2次的预设清洁区域对应的目标脏污程度,如预设清洁区域A1、A2、A4各被第2次清洁后分别获取到的对应的脏污程度,生成第2张第二清洁图像,如第二清洁图像b,如图38(b)或图39(b)所示,第二清洁图像b包括所有所述预设区域A1-A4对应的图像区域a1-a4,且每个图像区域a1、a2、a4标识的目标填充图示分别根据相应的目标脏污程度确定,以指示预设清洁区域A1、A2、A4分别被清洁2次之后的脏污程度,因为预设清洁区域A3未进行第2次清洁,所以预设清洁区域A3不属于在生成第2张第二清洁图像b时确定的第二目标预设清洁区域,图像区域a3标识的目标填充图示根据预设清洁区域A3第1次清洁之后获取到的对应的脏污程度确定,以显示出预设清洁区域A3的脏污程度并未发生改变,从而指示预设清洁区域A3未进行第2次清洁,如图38(b)所示;或者也可以不标识目标填充图示或标识预设的目标填充图示,以指示预设清洁区域A3未进行第2次清洁,如图39(b)所示,在此不做赘述。依此类推,根据清洁设备在完成对预设清洁区域A1和预设清洁区域A2的第3次清洁之后获取的脏污程度,生成一张第二清洁图像c,如图38(c)或15(c)所示,以指示预设清洁区域A1、A2分别被清洁3次之后的脏污程度。如此,可以根据一张第二清洁图像体现清洁设备的工作量,例如清洁设备从各预设清洁区域清理掉的脏污量,可以根据至少两张第二清洁图像体现清洁设备的工作过程,例如各预设清洁区域经过多次清洁后对应的脏污程度的变化。For example, please refer to Figures 38 and 39. When the cleaning equipment completes the cleaning task, if the cleaning equipment has cleaned the preset cleaning area A1 three times and cleaned the preset cleaning area A2 three times, the preset cleaning area A2 will be cleaned three times. Assume that the cleaning area A3 has been cleaned once, and the preset cleaning area A4 has been cleaned twice, then the target dirtiness levels corresponding to all the preset cleaning areas that have been cleaned once can be determined, such as the preset cleaning area The corresponding degree of dirtiness obtained after each of A1-A4 is cleaned once, generates the first second cleaning image, such as the second cleaning image a, as shown in Figure 38(a) or Figure 39(a), The second cleaning image a includes all image areas a1-a4 corresponding to the preset areas A1-A4, and each image area a1-a4 is marked with a target filling icon, and each image area a1-a4 is marked with a target filling icon. The illustrations are determined based on the corresponding dirtiness levels of the preset cleaning areas A1-A4 to indicate the dirtiness level before the preset cleaning areas A1-A4 were cleaned once respectively; similarly, they can be based on all the dirtiness levels that have been cleaned 2 times. The target dirtiness level corresponding to the preset cleaning area for the second time, such as the corresponding dirtiness level obtained after each of the preset cleaning areas A1, A2, and A4 is cleaned for the second time, generates the second second cleaning image, such as The second cleaning image b, as shown in Figure 38(b) or Figure 39(b), the second cleaning image b includes all image areas a1-a4 corresponding to the preset areas A1-A4, and each image area a1 The target filling icons marked by , a2 and a4 are determined according to the corresponding target degree of contamination to indicate the degree of contamination of the preset cleaning areas A1, A2 and A4 after being cleaned twice respectively, because the preset cleaning area A3 has not been cleaned. The second cleaning, so the preset cleaning area A3 does not belong to the second target preset cleaning area determined when generating the second second cleaning image b. The target filling icon identified in the image area a3 is based on the preset cleaning area A3. The corresponding degree of dirt obtained after one cleaning is determined to show that the degree of dirt in the preset cleaning area A3 has not changed, thereby indicating that the preset cleaning area A3 has not been cleaned for the second time, as shown in Figure 38(b) ); or the target filling icon may not be marked or the preset target filling icon may be marked to indicate that the preset cleaning area A3 has not been cleaned for the second time, as shown in Figure 39(b), which is not done here. Repeat. By analogy, a second cleaning image c is generated based on the degree of dirt obtained by the cleaning equipment after completing the third cleaning of the preset cleaning area A1 and the preset cleaning area A2, as shown in Figure 38(c) or 15 (c) is shown to indicate the degree of dirtiness of the preset cleaning areas A1 and A2 after they have been cleaned three times respectively. In this way, the workload of the cleaning equipment can be reflected based on one second cleaning image, such as the amount of dirt cleaned by the cleaning equipment from each preset cleaning area, and the working process of the cleaning equipment can be reflected based on at least two second cleaning images, such as Changes in the corresponding dirtiness of each preset cleaning area after multiple cleanings.
在一些实施方式中,完成清洁任务后生成一张第二清洁图像,即在完成清洁任务后只显示一张第二清洁图像,如通过点击屏幕中的标签,标签例如为图40中的“第1次”、“第2次”、“第3次”,对相应的第二清洁图像进行选择性显示,如图40所示,可选择显示第二清洁图像a-c中的任意一张第二清洁图像。In some embodiments, a second cleaning image is generated after the cleaning task is completed, that is, only one second cleaning image is displayed after the cleaning task is completed, such as by clicking a label on the screen. The label is, for example, "th" in Figure 40 1st time", "2nd time", "3rd time", the corresponding second cleaning image is selectively displayed, as shown in Figure 40, any one of the second cleaning images a-c can be selectively displayed. image.
在一些实施方式中,完成清洁任务后依次或同时生成至少两张第二清洁图像,即在完成清洁任务后依次或同时显示至少两张第二清洁图像,例如在完成清洁任务后,用户可以通过点击屏幕中的图标,图标例如为图41中的“清洁图像”,使得多张第二清洁图像可以依次显示,如图41所示;或同时在屏幕中显示至少两张第二清洁图像,如图42所示,将第二清洁图像a-c依次进行显示或同时显示。In some embodiments, after completing the cleaning task, at least two second cleaning images are generated sequentially or simultaneously, that is, after completing the cleaning task, at least two second cleaning images are displayed sequentially or simultaneously. For example, after completing the cleaning task, the user can Click the icon on the screen. The icon is, for example, "Clean Image" in Figure 41, so that multiple second cleaning images can be displayed in sequence, as shown in Figure 41; or at least two second cleaning images can be displayed on the screen at the same time, as shown in Figure 41. As shown in FIG. 42, the second cleaning images a-c are displayed sequentially or simultaneously.
在一些实施方式中,确定所有所述第二目标预设清洁区域均完成第i次清洁后,根据至少一个目标脏污程度,生成第i张第二清洁图像。示例性的,请参阅图38,若清洁设备按照预定的清洁顺序对各预设清洁区域A1、A2、A3、A4进行1次清洁,再对各预设清洁区域A1、A2、A3、A4中需要进行第2次清洁的预设清洁区域进行第2次清洁,依此类推,直至各预设清洁区域A1、A2、A3、A4对应的脏污程度小于脏污程度阈值;则可以在清洁设备对各预设清洁区域A1、A2、A3、A4进行1次清洁后,生成第1张第二清洁图像,如第二清洁图像a,在清洁设备对需要进行第2次清洁的预设清洁区域,如预设清洁区域A1、A2、A4进行第2次清洁后,生成第二清洁图像,如第二清洁图像b,依此类推,依次生成多张第二清洁图像,以阶段性地显示各预设清洁区域对应的脏污程度,体现各个预设清洁区域的脏污程度及各个预设清洁区域的脏污程度的变化。In some embodiments, after it is determined that all the second target preset cleaning areas have completed the i-th cleaning, the i-th second cleaning image is generated based on at least one target degree of contamination. For example, please refer to Figure 38. If the cleaning equipment cleans each preset cleaning area A1, A2, A3, and A4 once according to a predetermined cleaning sequence, and then cleans each preset cleaning area A1, A2, A3, and A4. The preset cleaning areas that need to be cleaned for the second time are cleaned for the second time, and so on, until the corresponding dirtiness of each preset cleaning area A1, A2, A3, and A4 is less than the dirtiness threshold; then the cleaning equipment can be After cleaning each preset cleaning area A1, A2, A3, and A4 once, a first second cleaning image is generated, such as the second cleaning image a, when the cleaning equipment cleans the preset cleaning area that needs to be cleaned for the second time. , for example, after the preset cleaning areas A1, A2, and A4 are cleaned for the second time, a second cleaning image is generated, such as the second cleaning image b, and so on, multiple second cleaning images are generated in sequence to display each in stages. The degree of dirtiness corresponding to the preset cleaning area reflects the degree of dirtiness of each preset cleaning area and the changes in the degree of dirtiness of each preset cleaning area.
可选地,根据至少一张第二清洁图像,生成动画或短视频。举例而言,随着动画或短视频的播放动态展示至少一张第二清洁图像,或者,通过动画或短视频展示多张第二清洁图像对应的预设清洁区域的变化过程。Optionally, generate animation or short video based on at least one second cleaning image. For example, at least one second cleaning image is dynamically displayed as the animation or short video plays, or the changing process of the preset cleaning area corresponding to multiple second cleaning images is displayed through the animation or short video.
示例性的,可以通过动画或短视频依次展示第二清洁图像a、第二清洁图像b、第二清洁图像c,以展示显示预设清洁区域A1、A2、A3、A4在经过至少一次清洁后对应的脏污程度的变化,进而有利于用户了解清洁设备的清洁过程,以及预设清洁区域逐渐变干净的过程。For example, the second cleaning image a, the second cleaning image b, and the second cleaning image c can be sequentially displayed through animation or short video to display the preset cleaning areas A1, A2, A3, and A4 after at least one cleaning. The corresponding changes in the degree of dirtiness help users understand the cleaning process of the cleaning equipment and the process of the preset cleaning area gradually becoming cleaner.
在一些实施方式中,动画或短视频可以是在清洁设备对各预设清洁区域的清洁过程中实时生成的,也可以是在清洁设备对各预设清洁区域完成清洁后生成的,以对清洁设备的清洁过程进行复现,在此不做限制。In some embodiments, the animation or short video can be generated in real time during the cleaning process of each preset cleaning area by the cleaning equipment, or can be generated after the cleaning equipment completes cleaning of each preset cleaning area to provide a clear picture of the cleaning process. The cleaning process of the equipment is repeated and is not limited here.
在一些实施方式中,根据预设清洁区域对应的脏污程度,生成清洁图像,包括:根据获取的预设清洁区域对应的脏污程度累积量,生成第三清洁图像。示例性的,每对一个预设清洁区域完成一次清洁,即生成一张第三清洁图像,每张清洁图像包含所有预设清洁区域对应的图像区域,且各预设清洁区域对应的图像区域填充的目标填充图示分别由各预设清洁区域对应的脏污程度的累加值确定。In some embodiments, generating a cleaning image based on the degree of dirt corresponding to the preset cleaning area includes: generating a third cleaning image based on the acquired accumulated amount of degree of dirt corresponding to the preset cleaning area. For example, each time a cleaning is completed for a preset cleaning area, a third cleaning image is generated. Each cleaning image contains image areas corresponding to all preset cleaning areas, and the image areas corresponding to each preset cleaning area are filled with The target filling icon is determined by the accumulated value of the dirtiness degree corresponding to each preset cleaning area.
示例性的,请结合前述实施例参阅图43,当清洁设备在执行清洁任务时,清洁设备按照A1-A2-A3-A4的清洁顺序对各预设清洁区域A1、A2、A3、A4进行清洁,当然各预设清洁区域的清洁顺序也不限于此,以下以A1-A2-A3-A4的清洁顺序进行说明。若清洁设备累计对预设清洁区域A1进行了3次清洁,对预设清洁区域A2进行了3次清洁,对预设清洁区域A3进行了1次清洁,以及对预设清洁区域A4进行了2次清洁,则可以根据清洁设备对预设清洁区域A1进行了第一次清洁之后,获取的预设清洁区域A1对应的脏污程度,生成一张第三清洁图像a,如图43(a)所示,第三清洁图像a包含所有预设清洁区域A1-A4对应的图像区域a1-a4,且预设清洁区域A1对应的图像区域a1有数值500填充,图像区域a1填充的数值由预设清洁区域A1第一次清洁对应的脏污程度确定;若完成预设清洁区域A1的本次清洁后,清洁设备还需要继续对预设清洁区域A1进行第二次清洁,则可以根据两次清洁后预设清洁区域A1对应的两个脏污程度的累加值,生成一张第三清洁图像b,如图43(b)所示,第三清洁图像b包含所有预设清洁区域A1-A4对应的图像区域a1-a4,预设清洁区域A1对应的图像区域a1填充的数值800由第二次获取的预设清洁区域A1对应的脏污程度和第一次获取的预设清洁区域A1对应的脏污程度的累加值确定,可以理解预设清洁区域A1完成第三次清洁后,根据预设清洁区域A1对应三个脏污程度的累加值,生成第三清洁图像c,如图43(c)所示,预设清洁区域A1对应的图像区域a1填充的数值900。可以理解,清洁设备对预设清洁区域A1完成清洁后继续清洁预设清洁区域A2,预设清洁区域A2完成第一次清洁后,根据预设清洁区域A1对应三个脏污程度的累加值以及预设清洁区域A2对应的脏污程度累加值,生成第三清洁图像d,如图43(d)所示,第三清洁图像d包含所有预设清洁区域A1-A4对应的图像区域a1-a4,预设清洁区域A1对应的图像区域a1填充的数值900由对应的三个脏污程度的累加值确定,预设清洁区域A2对应的图像区域a2填充的数值500由对应的一个脏污程度确定。对于未被清洁过的预设清洁区域对应的图像区域不标识目标填充图示或标识预设的目标填充图示,如第三清洁图像a-c中的图像区域a2-a4不标识目标填充图示,当然也可以标识预设的目标填充图示,在此不做限定。依次类推,生成多张第三清洁图像,从而可以根据至少两张第三清洁图像体现清洁设备对一个预设清洁区域的清洁过程,例如清洁设备对预设清洁区域的清洁次数以及清洁设备对该预设清洁区域的清洁过程中清理的脏污量的变化。还可以根据最后一张第三清洁图像显示各预设清洁区域分别被清洁之前的脏污程度及清洁设备对预设清洁区域的累积清洁量。如图44所示,其中预设清洁区域A1对应的图像区域a1的填充数值900根据预设清洁区域A1进行了3次清洁后的累积脏污程度确定,预设清洁区域A2对应的图像区域a2的填充数值900根据预设清洁区域A2进行了3次清洁后的累积脏污程度确定,预设清洁区域A3对应的图像区域a3的填充数值100根据预设清洁区域A3进行了1次清洁后的累积脏污程度确定,预设清洁区域A4对应的图像区域a4的填充数值400根据预设清洁区域A4进行了2次清洁后的累积脏污程度确定,可以看出对各预设区域经过不同次清洁后,清洁设备对各预设区域累计清理的脏污量的不同,便于用 户提高各预设区域的脏污程度不同的感知度以及提高对清洁设备清洁能力的感知度。For example, please refer to Figure 43 in conjunction with the previous embodiment. When the cleaning equipment performs a cleaning task, the cleaning equipment cleans each of the preset cleaning areas A1, A2, A3, and A4 in the cleaning sequence of A1-A2-A3-A4. , of course, the cleaning order of each preset cleaning area is not limited to this. The cleaning order of A1-A2-A3-A4 will be explained below. If the cleaning equipment cleans the preset
当然,可选的,目标填充图示可以用数值填充,也可以采用颜色填充,脏污程度越高,颜色填充越深。示例性的,可以根据清洁设备对预设清洁区域A1进行了第一次清洁之后,获取的预设清洁区域A1对应的脏污程度,生成一张第三清洁图像a,第三清洁图像a包含所有预设清洁区域A1-A4对应的图像区域a1-a4,且预设清洁区域A1对应的图像区域a1有颜色填充,图像区域a1填充的颜色由预设清洁区域A1第一次清洁对应的脏污程度确定。再比如,对于最后一张第三清洁图像,也可以如图45所示,填充图示用颜色填充的方式显示各预设清洁区域分别被清洁之前的脏污程度及清洁设备对预设清洁区域的累积清洁量。Of course, optionally, the target filling icon can be filled with a numerical value or a color filling. The higher the degree of dirt, the darker the color filling. For example, a third cleaning image a can be generated based on the degree of dirt corresponding to the preset cleaning area A1 obtained after the cleaning device cleans the preset cleaning area A1 for the first time. The third cleaning image a includes All the image areas a1-a4 corresponding to the preset cleaning areas A1-A4, and the image area a1 corresponding to the preset cleaning area A1 is filled with color. The color filled in the image area a1 is determined by the first cleaning of the preset cleaning area A1. The degree of contamination is determined. For another example, for the last third cleaning image, as shown in Figure 45, the fill icon can be filled with color to display the degree of dirt of each preset cleaning area before being cleaned and the effect of the cleaning equipment on the preset cleaning area. cumulative cleaning volume.
可选地,根据第三清洁图像,生成动画或短视频。举例而言,随着动画或短视频的播放动态展示第三清洁图像中包括的预设清洁区域对应的图像区域的目标填充图示逐渐变化的过程,以体现预设清洁区域的脏污量被清洁处理的过程,也可以体现拖擦件清洁预设清洁区域的过程中,脏污洗脱值的累积过程。Optionally, generate animation or short video based on the third cleaning image. For example, as the animation or short video plays, the process of gradually changing the target filling icon of the image area corresponding to the preset cleaning area included in the third cleaning image is dynamically displayed to reflect the amount of dirt in the preset cleaning area. The cleaning process can also reflect the accumulation process of the dirt elution value in the process of cleaning the preset cleaning area of the mop piece.
示例性的,可以通过动画或短视频按第三清洁图像的生成顺序依次展示多张第三清洁图像,从而可以通过动画或短视频显示清洁设备的清洁过程,例如清洁设备对一预设清洁区域进行至少1次清洁后,该清洁设备对该预设清洁区域清理掉的脏污的累积过程,进而有利于用户了解清洁设备的清洁过程,以及清洁设备对预设清洁区域的至少1次清洁之后的各预设清洁区域的脏污程度的累积清洁量。For example, multiple third cleaning images can be displayed sequentially in the order in which the third cleaning images are generated through animation or short videos, so that the cleaning process of the cleaning equipment can be displayed through animations or short videos, for example, the cleaning process of the cleaning equipment against a preset cleaning area. After at least one cleaning, the cleaning equipment cleans the preset cleaning area of the dirt accumulation process, which is beneficial to the user to understand the cleaning process of the cleaning equipment, and after the cleaning equipment cleans the preset cleaning area at least once. The accumulated cleaning amount of each preset cleaning area according to the degree of dirtiness.
在一些实施方式中,动画或短视频可以是在清洁设备对各预设清洁区域的清洁过程中实时生成的,也可以是在清洁设备对各预设清洁区域的清洁都完成之后生成的,以对清洁设备的清洁过程进行复现,在此不做限制。In some embodiments, the animation or short video may be generated in real time during the cleaning process of each preset cleaning area by the cleaning equipment, or may be generated after the cleaning equipment completes cleaning of each preset cleaning area. Reproduction of the cleaning process of the cleaning equipment is not limited here.
示例性的,清洁图像包括房间区域,房间区域与一个或至少两个预设清洁区域对应。在一些实施方式中,根据预设清洁区域对应的脏污程度,生成清洁图像,包括:根据房间区域对应的一个或至少两个所述预设清洁区域对应的脏污程度,确定房间区域的目标填充图示。Exemplarily, the cleaning image includes a room area, and the room area corresponds to one or at least two preset cleaning areas. In some embodiments, generating a cleaning image according to the degree of dirtiness corresponding to the preset cleaning area includes: determining the target of the room area according to the degree of dirtiness corresponding to one or at least two of the preset cleaning areas in the room area. Fill icon.
示例性的,清洁设备根据任务地图对至少一个房间进行清洁,请参阅图46,房间R包括一个或多个预设清洁区域B,清洁设备对房间R进行清洁后可生成清洁图像,清洁图像包括房间R对应的房间区域r,可以理解房间区域r对应预设清洁区域B,房间区域r的目标填充图示根据预设清洁区域B对应的脏污程度确定。请参阅图47,房间R1包括预设清洁区域B1、预设清洁区域B2以及预设清洁区域B3,清洁设备对房间R1进行清洁后可生成清洁图像,清洁图像包括房间R1对应的房间区域r1,可以理解房间区域r1对应预设清洁区域B1、预设清洁区域B2以及预设清洁区域B3,房间区域r1的目标填充图示根据预设清洁区域B1、预设清洁区域B2以及预设清洁区域B3对应的脏污程度确定。Exemplarily, the cleaning equipment cleans at least one room according to the task map. Please refer to Figure 46. Room R includes one or more preset cleaning areas B. After cleaning room R, the cleaning equipment can generate a cleaning image. The cleaning image includes For the room area r corresponding to room R, it can be understood that the room area r corresponds to the preset cleaning area B, and the target filling icon of the room area r is determined according to the degree of dirt corresponding to the preset cleaning area B. Please refer to Figure 47. Room R1 includes preset cleaning area B1, preset cleaning area B2 and preset cleaning area B3. The cleaning equipment can generate a cleaning image after cleaning room R1. The cleaning image includes room area r1 corresponding to room R1. It can be understood that the room area r1 corresponds to the preset cleaning area B1, the preset cleaning area B2 and the preset cleaning area B3. The target filling icon of the room area r1 is based on the preset cleaning area B1, the preset cleaning area B2 and the preset cleaning area B3. The corresponding degree of soiling is determined.
在一些实施方式中,根据房间区域对应的一个或至少两个预设清洁区域对应的脏污程度,确定所述房间区域的目标填充图示,包括:根据房间区域对应的至少两个所述预设清洁区域对应的脏污程度的平均脏污程度、总脏污程度、脏污程度最大值、任一预设清洁区域的脏污程度中的任意一个值,确定所述房间区域的目标填充图示。In some embodiments, determining the target filling diagram of the room area based on the degree of dirt corresponding to one or at least two preset cleaning areas corresponding to the room area includes: based on the at least two preset cleaning areas corresponding to the room area. Assuming any one of the average degree of dirtiness, the total degree of dirtiness, the maximum degree of dirtiness, or the dirtiness degree of any preset clean area corresponding to the clean area, determine the target filling map of the room area. Show.
举例而言,当清洁设备对房间中预设清洁区域均进行清洁后,则可以根据房间中各预设清洁区域对应的脏污程度的平均脏污程度、总脏污程度、脏污程度最大值、任一预设清洁区域的脏污程度中的任意一个值,确定所述房间区域的目标填充图示。示例性的,请参阅图47,当清洁设备在执行清洁任务时,若清洁设备分别对房间R1包括的预设清洁区域B1、预设清洁区域B2以及预设清洁区域B3进行了一次清洁,例如,可以对预设清洁区域B1对应的脏污程度、预设清洁区域B2对应的脏污程度以及预设清洁区域B3对应的脏污程度进行累积后除以此次清洁中对应的预设清洁区域的个数,以根据房间R1中预设清洁区域的平均脏污程度确定房间R1对应的房间区域r1的目标填充图示;例如,可以对预设清洁B1对应的脏污程度、预设清洁区域B2对应的脏污程度以及预设清洁区域B3对应的脏污程度进行累积, 以根据房间R1中所有预设清洁区域的总脏污程度确定房间R1对应的房间区域r1的目标填充图示;例如,可以对预设清洁区域B1对应的脏污程度、预设清洁区域B2对应的脏污程度以及预设清洁区域B3对应的脏污程度进行比较,以根据房间R1中预设清洁区域对应的脏污程度的最大值确定房间R1对应的房间区域r1的目标填充图示;例如,可以对预设清洁区域B1对应的脏污程度、预设清洁区域B2对应的脏污程度以及预设清洁区域B3对应的脏污程度进行随机选取,以根据随机选取的房间R1中任一预设清洁区域对应的脏污程度,确定房间R1对应的房间区域r1的目标填充图示。For example, after the cleaning equipment cleans all the preset cleaning areas in the room, the average degree of dirtiness, the total degree of dirtiness, and the maximum degree of dirtiness corresponding to each preset clean area in the room can be calculated. , any value in the degree of dirtiness of any preset clean area, determine the target filling diagram of the room area. For example, please refer to Figure 47. When the cleaning equipment is performing a cleaning task, if the cleaning equipment performs a cleaning on the preset cleaning area B1, the preset cleaning area B2 and the preset cleaning area B3 included in the room R1, for example , the degree of dirtiness corresponding to the preset cleaning area B1, the degree of dirtiness corresponding to the preset cleaning area B2, and the degree of dirtiness corresponding to the preset cleaning area B3 can be accumulated and then divided by the corresponding preset cleaning area in this cleaning to determine the target filling diagram of room area r1 corresponding to room R1 according to the average dirtiness level of the preset cleaning area in room R1; for example, the dirtiness level corresponding to the preset cleaning B1, the preset cleaning area The degree of dirtiness corresponding to B2 and the degree of dirtiness corresponding to the preset clean area B3 are accumulated to determine the target filling diagram of the room area r1 corresponding to the room R1 based on the total dirtiness level of all preset clean areas in the room R1; for example , the degree of dirtiness corresponding to the preset clean area B1, the degree of dirtiness corresponding to the preset clean area B2, and the degree of dirtiness corresponding to the preset clean area B3 can be compared to determine the degree of dirtiness corresponding to the preset clean area in the room R1. The maximum value of the degree of contamination determines the target filling icon of the room area r1 corresponding to the room R1; for example, the degree of contamination corresponding to the preset clean area B1, the degree of contamination corresponding to the preset clean area B2, and the preset clean area B3 can be determined The corresponding degree of contamination is randomly selected to determine the target filling icon of the room area r1 corresponding to the room R1 based on the degree of contamination corresponding to any preset clean area in the randomly selected room R1.
举例而言,当房间区域对应的至少两个所述预设清洁区域中的至少一个预设清洁区域被清洁的次数大于1次时,可以根据所述房间区域对应的所有被第i次清洁后的预设清洁区域对应的脏污程度的平均脏污程度、总脏污程度、脏污程度最大值、任一预设清洁区域的脏污程度中的任意一个值,确定所述房间区域的目标填充图示,以生成第i张包括所述房间区域的清洁图像。示例性的,若清洁设备对房间R1包括的预设清洁区域B1进行了2次清洁,对预设清洁区域B2进行了2次清洁以及对预设清洁区域B3进行了1次清洁,例如,预设清洁区域B1、预设清洁区域B2以及预设清洁区域B3在分别在第1次清洁之后各自对应的脏污程度分别为500、600、100,500、600、100三个脏污程度的平均值为400、加总值为1200、最大值为600,则可根据平均值400、加总值1200、预设清洁区域B1-B3各自对应的脏污程度值600、500、100五个值中的任意一个值,确定房间R1对应的房间区域r1的目标填充图示,以生成包含房间区域r1的第1张清洁图像;预设清洁区域B1以及预设清洁区域B2在第2次清洁之后对应的脏污程度分别为100、200,100、200两个值的平均值为150、加总值为300、最大值为200,则可根据150、300、200、100中的任意一个值确定房间R1对应的房间区域r1的目标填充图示,以生成包含房间区域r1的第2张清洁图像。在一些实施方式中,可以根据房间区域对应的多个脏污程度,生成与房间区域对应的脏污程度个数对应的多张房间清洁图像。可以理解的,平均脏污程度、总脏污程度、脏污程度最大值、任一预设清洁区域的第一脏污程度中的任意一种的确定可以参照前述,在此不再赘述。For example, when at least one of the at least two preset cleaning areas corresponding to the room area has been cleaned more than 1 time, it can be determined according to all the cleaning areas corresponding to the room area that have been cleaned for the ith time. The target of the room area is determined by any one of the average degree of dirtiness, the total degree of dirtiness, the maximum degree of dirtiness, or the dirtiness degree of any preset clean area corresponding to the preset clean area. Fill in the diagram to generate the i-th cleaning image including the room area. For example, if the cleaning equipment cleans the preset cleaning area B1 included in the room R1 twice, cleans the preset cleaning area B2 twice and cleans the preset cleaning area B3 once, for example, the preset cleaning area B1 is cleaned twice. Assume that the corresponding dirtiness levels of clean area B1, preset clean area B2 and preset clean area B3 after the first cleaning are respectively 500, 600, 100, and the average of the three dirtiness levels of 500, 600 and 100. If the value is 400, the total value is 1200, and the maximum value is 600, then the five values of 600, 500, and 100 can be selected based on the average value of 400, the total value of 1200, and the corresponding pollution degree values of 600, 500, and 100 for the preset cleaning areas B1-B3. Any value of , determine the target filling icon of the room area r1 corresponding to the room R1 to generate the first cleaning image containing the room area r1; the preset cleaning area B1 and the preset cleaning area B2 correspond to each other after the second cleaning The degree of dirtiness is 100 and 200 respectively. The average of the two
举例而言,当所述房间区域对应的至少两个所述预设清洁区域的清洁次数大于1次时,可以根据所述房间区域对应的所述预设清洁区域对应的脏污程度之和的平均脏污程度、总脏污程度、脏污程度最大值、任一预设清洁区域的脏污程度之和中的任意一个值,确定所述房间区域的目标填充图示,以生成包含所述房间区域的清洁图像。示例性的,若清洁设备对房间R1包括的预设清洁区域B1进行了2次清洁,对预设清洁区域B2进行了2次清洁以及对预设清洁区域B3进行了一次清洁,例如,预设清洁区域B1在经过2次清洁分别获取的对应的脏污程度为500、100,则2次清洁分别对应的脏污程度之和为600,预设清洁区域B2在经过2次清洁分别获取的对应的脏污程度为600、200,则2次清洁分别对应的脏污程度之和800,预设清洁区域B3在经过1次清洁获取的对应的脏污程度为100,预设清洁区域B1对应的脏污程度之和600、预设清洁区域B2对应的脏污程度之和800、预设清洁区域B3对应的脏污程度100这3个值的平均值为500、加总值为1500、最大值为800,则可根据平均值500、加总值1500、预设清洁区域B1-B3各自对应的脏污程度值之和600、800、100五个值中的任意一个值,确定所述房间R1对应的房间区域r1的目标填充图示,以生成包含房间区域r1的清洁图像。For example, when the number of cleanings of at least two preset cleaning areas corresponding to the room area is greater than 1 time, the calculation can be based on the sum of the dirt levels corresponding to the preset cleaning areas corresponding to the room area. Any one of the average dirtiness level, the total dirtiness level, the maximum dirtiness level, and the sum of the dirtiness levels in any preset clean area is used to determine the target filling diagram of the room area to generate a target filling diagram containing the Cleaning images of room areas. For example, if the cleaning equipment cleans the preset cleaning area B1 included in the room R1 twice, cleans the preset cleaning area B2 twice and cleans the preset cleaning area B3 once, for example, the preset cleaning area B1 is cleaned twice. The corresponding dirtiness levels obtained by cleaning area B1 after two cleanings are 500 and 100 respectively. Then the sum of the dirtiness levels corresponding to the two cleanings is 600. The preset cleaning area B2's corresponding dirtiness levels obtained after two cleanings are respectively The degree of dirtiness is 600 and 200, then the sum of the degree of dirtiness corresponding to the two cleanings is 800. The corresponding degree of dirtiness of the preset cleaning area B3 after one cleaning is 100. The corresponding degree of dirtiness of the preset cleaning area B1 is 100. The sum of the dirtiness levels is 600, the sum of the dirtiness levels corresponding to the preset clean area B2 is 800, and the dirtiness level corresponding to the preset clean area B3 is 100. The average of these three values is 500, the total value is 1500, and the maximum value is 800, then the room R1 can be determined based on any one of the five values of 500, the total value 1500, and the sum of the corresponding dirtiness values of the preset clean areas B1-B3: 600, 800, and 100. The target of the corresponding room area r1 is filled in to generate a cleaning image containing the room area r1.
可选的,该处理方法还包括:获取清洁设备执行清洁任务的顺序节点位置,所述节点位置包括起始位置、中断位置、结束位置中的至少一种;确定连接清洁顺序相邻的两个所述节点位置的清洁轨迹所覆盖的区域为一个所述预设清洁区域。Optionally, the processing method also includes: obtaining the node position of the sequence in which the cleaning equipment performs the cleaning task, the node position including at least one of a starting position, an interruption position, and an end position; and determining to connect two adjacent nodes in the cleaning sequence. The area covered by the cleaning trajectory of the node position is one of the preset cleaning areas.
在一些实施方式中,清洁设备根据任务地图对房间执行清洁任务时,清洁设备会根据工作量阈值中断清洁任务以进行维护,工作量阈值包括清洁面积阈值、耗电量阈值、耗水量阈值、拖擦件收纳污垢上限阈值、清水箱的低水位阈值、污水箱的高水位阈值等,清洁设备完成维护后可以从上次中断清洁任务的位置继续执行清洁任务,可以将连接本次中断位置和 下次中断位置的清洁轨迹所覆盖的区域确定为一个预设清洁区域,可以根据该清洁轨迹所覆盖的区域对应的脏污程度,生成一张清洁图像,该清洁图像中清洁轨迹所覆盖的区域对应的图像区域的目标填充图示由清洁轨迹所覆盖的区域对应脏污程度确定。如图48所示,清洁设备对房间R1进行清洁,清洁设备从房间R1开始清洁,起始位置O1在房间R1,清洁设备沿清洁路径清洁至O2位置时根据工作量阈值需要中断清洁任务,则O2位置即为中断位置O2,获取到连接起始位置O1和中断位置O2的清洁轨迹S1所覆盖的区域对应的脏污程度并生成第一张清洁图像,清洁图像中的图像区域s1对应清洁轨迹S1所覆盖的区域,图像区域s1标识的目标填充图示根据清洁轨迹S1所覆盖的区域对应的脏污程度确定。依次类推,可根据清洁轨迹S2、S3所覆盖的区域对应的脏污程度生成第2、3张清洁图像,若清洁设备还对清洁轨迹所覆盖的区域进行了第2次清洁,则可以根据清洁轨迹所覆盖的区域在第2次后获取到的清洁轨迹覆盖的区域对应的脏污程度,确定该清洁轨迹覆盖的区域对应的图像区域的目标填充图示,以生成一张清洁图像。可以理解的,通过至少一张根据清洁轨迹所覆盖的区域对应的脏污程度生成的清洁图像,可以体现清洁设备的工作过程,例如突出清洁设备的清洁轨迹,不同清洁轨迹覆盖的区域对应的脏污程度,多次清洁之后不同清洁轨迹覆盖的区域对应的脏污程度的变化中的至少一项。In some embodiments, when the cleaning equipment performs a cleaning task on the room according to the task map, the cleaning equipment interrupts the cleaning task for maintenance according to a workload threshold. The workload threshold includes a cleaning area threshold, a power consumption threshold, a water consumption threshold, and a mopping threshold. The upper limit threshold of dirt storage in the wiper, the low water level threshold of the clean water tank, the high water level threshold of the sewage tank, etc. After the cleaning equipment completes the maintenance, it can continue to perform the cleaning task from the location where the cleaning task was last interrupted. You can connect the current interruption location and the next The area covered by the cleaning track at the secondary interruption position is determined as a preset cleaning area. A cleaning image can be generated based on the degree of dirt corresponding to the area covered by the cleaning track. The area covered by the cleaning track in the cleaning image corresponds to The target fill pattern of the image area is determined by the corresponding degree of dirtiness of the area covered by the cleaning track. As shown in Figure 48, the cleaning equipment cleans room R1. The cleaning equipment starts cleaning from room R1. The starting position O1 is in room R1. When the cleaning equipment cleans along the cleaning path to position O2, it needs to interrupt the cleaning task according to the workload threshold, then The position O2 is the interruption position O2. The degree of dirtiness corresponding to the area covered by the cleaning trajectory S1 connecting the starting position O1 and the interruption position O2 is obtained and the first cleaning image is generated. The image area s1 in the cleaning image corresponds to the cleaning trajectory. The area covered by S1 and the target filling icon identified by the image area s1 are determined according to the degree of dirt corresponding to the area covered by the cleaning track S1. By analogy, the second and third cleaning images can be generated based on the degree of contamination of the areas covered by the cleaning tracks S2 and S3. If the cleaning equipment also cleans the area covered by the cleaning tracks for the second time, it can be based on the cleaning The degree of dirtiness of the area covered by the trajectory corresponding to the area covered by the cleaning trajectory obtained after the second time is determined, and the target filling icon of the image area corresponding to the area covered by the cleaning trajectory is determined to generate a clean image. It can be understood that the working process of the cleaning equipment can be reflected by at least one cleaning image generated according to the degree of dirt corresponding to the area covered by the cleaning track, for example, highlighting the cleaning track of the cleaning equipment, and the dirt corresponding to the area covered by different cleaning tracks. The degree of contamination is at least one of the changes in the degree of contamination corresponding to the areas covered by different cleaning trajectories after multiple cleanings.
举例而言,还可以根据所有所述清洁轨迹所覆盖的区域被第i次清洁后各所述清洁轨迹所覆盖的区域对应的脏污程度的平均脏污程度、总脏污程度、脏污程度最大值、任一预设清洁区域的脏污程度中的任意一个值,确定所有被第i次清洁后的所述清洁轨迹所覆盖的区域对应的图像区域的目标填充图示,以生成第i张清洁图像。如图49所示,清洁设备对房间R1和房间R2进行清洁,完成房间R1的清洁是形成了3段清洁轨迹,即清洁轨迹S1-S3,其中清洁轨迹S1和S2所覆盖的区域分别清洁了2次,清洁轨迹S3所覆盖的区域清洁了1次,且每次在清洁轨迹S1-S3所覆盖的区域清洁之后获取了相应的脏污程度,例如清洁轨迹S1-S3所覆盖的区域清洁第1次后获取到的脏污程度分别为500、600、100,三个脏污程度的平均值为400、加总值为1200,则可以根据平均值为400、加总值为1200、清洁轨迹S1-S3所覆盖的区域各自对应的脏污程度500、600、100五个值中的任意一个值,确定清洁轨迹S1-S3所覆盖的区域对应的图形区域s1-s3的目标填充图示,以生成第1张清洁图像,如图49(a)所示;清洁轨迹S1、S2所覆盖的区域清洁第2次后获取到的脏污程度分别为100、200,两个脏污程度的平均值为150、加总值为300,则可以根据平均值为150、加总值为300、清洁轨迹S1、S2所覆盖的区域各自对应的脏污程度100、200四个值中的任意一个值,确定清洁轨迹S1、S2所覆盖的区域对应的图形区域s1、s2的目标填充图示,以生成第2张清洁图像,如图49(b)所示,从而可以通过第1和第2张清洁图像上经过不同清洁频次的预设清洁区域的整体脏污程度的变化,凸显清洁设备的工作过程。示例性的,可以对清洁轨迹覆盖的清洁区域按照预设的规则进行适当的膨胀,以使清洁轨迹覆盖的清洁区域更明显,便于用户观察,从而提高用户的使用体验。For example, the average degree of dirtiness, the total degree of dirtiness, and the degree of dirtiness corresponding to the area covered by each of the cleaning tracks after the i-th cleaning can also be used. The maximum value, any value of the degree of contamination of any preset cleaning area, determine the target filling icon of all image areas corresponding to the areas covered by the cleaning track after the i-th cleaning, to generate the i-th clean image. As shown in Figure 49, the cleaning equipment cleans room R1 and room R2. After completing the cleaning of room R1, three cleaning trajectories are formed, namely cleaning trajectories S1-S3. The areas covered by cleaning trajectories S1 and S2 are cleaned respectively. 2 times, the area covered by the cleaning track S3 was cleaned once, and the corresponding degree of dirt was obtained each time after the area covered by the cleaning tracks S1-S3 was cleaned. For example, the area covered by the cleaning tracks S1-S3 was cleaned for the first time. The dirtiness levels obtained after 1 time are 500, 600, and 100 respectively. The average of the three dirtiness levels is 400 and the total value is 1200. Then the cleaning trajectory can be calculated based on the average value of 400, the total value of 1200, and the total value of 1200. The area covered by S1-S3 corresponds to any one of the five
可选的,清洁图像可以称为脏污热力图;可选的,该处理方法还包括:根据生成的清洁图像,生成动画或短视频。Optionally, the clean image can be called a dirty heat map; optionally, the processing method also includes: generating animation or short video based on the generated clean image.
在一些实施方式中,可以基于前述生成的多张清洁图像,生成动画或短视频,例如可以逐帧播放清洁图像。In some implementations, an animation or short video can be generated based on the plurality of cleaning images generated above. For example, the cleaning images can be played frame by frame.
当然也不限于此,可以通过各种可视化方式进行拓展,以便于用户了解清洁设备的清洁效果,从而提高用户对清洁设备的使用体验。Of course, it is not limited to this. It can be expanded through various visualization methods to facilitate users to understand the cleaning effect of the cleaning equipment, thereby improving the user's experience of using the cleaning equipment.
示例性的,请参阅图50,图50是本申请一实施方式涉及的清洁图像。For example, please refer to FIG. 50 , which is a cleaning image related to an embodiment of the present application.
如图50所示,根据用户的选择操作,显示清洁图像。在一些实施方式中,用户可以通过选择不同的清洁次数,确定要输出的清洁图像,响应于用户选择的清洁次数,输出显示该清洁次数对应的清洁图像。当然也不限于此,可以通过各种方式提示用户对前述生成的清洁图像进行选择,以便于用户了解清洁设备在不同的清洁阶段对地面的清洁效果。As shown in Fig. 50, a cleaning image is displayed according to the user's selection operation. In some embodiments, the user can determine the cleaning image to be output by selecting different cleaning times, and in response to the cleaning times selected by the user, the cleaning image corresponding to the cleaning times is output and displayed. Of course, it is not limited to this. The user can be prompted to select the aforementioned generated cleaning images in various ways, so that the user can understand the cleaning effect of the cleaning equipment on the floor in different cleaning stages.
可选的,根据用户选择的清洁次数,显示该清洁次数对应的清洁图像图片,以便于用户了解清洁设备在不同的清洁阶段对地面的清洁效果。Optionally, according to the cleaning times selected by the user, the cleaning images corresponding to the cleaning times are displayed so that the user can understand the cleaning effect of the cleaning equipment on the floor in different cleaning stages.
在一些实施方式中,如图50所示,输出的清洁图像中还包括清洁设备执行此次清洁任务对应的清洁信息,例如清洁面积以及清洁耗时等,以便于用户了解清洁设备的工作过程,从而提高用户对清洁设备的使用体验。In some embodiments, as shown in Figure 50, the output cleaning image also includes cleaning information corresponding to the cleaning task performed by the cleaning equipment, such as cleaning area and cleaning time, so that the user can understand the working process of the cleaning equipment. Thereby improving the user's experience of using cleaning equipment.
本申请实施例提供的清洁设备清洁图像的处理方法,包括:在清洁设备通过清洁件对一预设清洁区域进行一次清洁之后,获取预设清洁区域对应的脏污程度;根据一个或至少两个预设清洁区域对应的脏污程度,生成清洁图像,以实现清洁设备的清洁工作量的可视化,从而提高用户对清洁设备的使用体验。The method for processing cleaning images of cleaning equipment provided by embodiments of the present application includes: after the cleaning equipment cleans a preset cleaning area once through a cleaning piece, obtaining the degree of dirt corresponding to the preset cleaning area; based on one or at least two Preset the degree of dirtiness corresponding to the cleaning area and generate a cleaning image to visualize the cleaning workload of the cleaning equipment, thereby improving the user's experience of using the cleaning equipment.
请结合上述实施例参阅图51,图51为本申请实施例提供的一种清洁设备清洁图像的处理装置300的示意性框图。该处理装置300包括处理器301和存储器302。Please refer to FIG. 51 in conjunction with the above embodiment. FIG. 51 is a schematic block diagram of a
示例性的,处理器301和存储器302通过总线303连接,该总线303比如为I2C(Inter-integrated Circuit)总线。For example, the
具体地,处理器301可以是微控制单元(Micro-controller Unit,MCU)、中央处理单元(Central Processing Unit,CPU)或数字信号处理器(Digital Signal Processor,DSP)等。Specifically, the
具体地,存储器302可以是Flash芯片、只读存储器(ROM,Read-Only Memory)磁盘、光盘、U盘或移动硬盘等。Specifically, the
其中,所述处理器301用于运行存储在存储器302中的计算机程序,并在执行所述计算机程序时实现前述的清洁设备清洁图像的处理方法的步骤。Wherein, the
示例性的,所述处理器301用于运行存储在存储器302中的计算机程序,并在执行所述计算机程序时实现如下步骤:Exemplarily, the
在清洁设备通过清洁件对一预设清洁区域进行一次清洁之后,获取所述预设清洁区域对应的脏污程度;After the cleaning equipment cleans a preset cleaning area once through the cleaning piece, obtain the degree of dirt corresponding to the preset cleaning area;
根据一个或至少两个预设清洁区域对应的脏污程度,生成清洁图像。A cleaning image is generated based on the degree of dirtiness corresponding to one or at least two preset cleaning areas.
本申请实施例提供的处理装置300的具体原理和实现方式均与前述实施例的方法类似,在此不再赘述。The specific principles and implementation methods of the
请结合上述实施例参阅图26,图26是本申请实施例提供的一种清洁设备系统的示意图。Please refer to Figure 26 in conjunction with the above embodiment. Figure 26 is a schematic diagram of a cleaning equipment system provided by an embodiment of the present application.
如图26所示,清洁设备系统包括:As shown in Figure 26, the cleaning equipment system includes:
清洁设备100,所述清洁设备100包括运动机构和清洁件,所述运动机构用于驱动所述清洁设备100运动,以使所述清洁件对预设清洁区域进行清洁;
基站200,所述基站200至少用于对所述清洁设备100的清洁件进行清洁;以及,
处理装置300。
请结合上述实施例参阅图27,图27是本申请实施例提供的一种清洁设备系统的示意图。Please refer to Figure 27 in conjunction with the above embodiment. Figure 27 is a schematic diagram of a cleaning equipment system provided by an embodiment of the present application.
如图27所示,清洁设备系统包括:As shown in Figure 27, the cleaning equipment system includes:
清洁设备100,所述清洁设备100包括运动机构、清洁件和维护机构,所述运动机构用于驱动所述清洁设备100运动,以使所述清洁件对预设清洁区域进行清洁,所述维护机构用于对所述清洁件进行清洁;以及,
处理装置300。
示例性的,清洁设备100包括清洁机器人、手持式清洁设备、其他清洁设备中的至少一种。Exemplarily, the
可选地,清洁设备100例如可以自行对清洁件进行清洁,例如清洁设备100包括维护机构。Alternatively, the
可选地,清洁设备100例如不可以自行对清洁件进行清洁,例如清洁设备系统中还包括基站200,其中,基站200至少用于对清洁设备的执行机构进行清洁。Optionally, the
在一些实施方式中,清洁设备100中例如设置有设备控制器,以及基站200中例如设置有基站控制器,示例性的,设备控制器和/或基站200的基站控制器可以单独或者配合作为处理装置300,用于实现本申请实施例的方法的步骤;在另一些实施方式中,清洁系统包括单独的处理装置300,用于实现本申请实施例的方法的步骤,该控制装置300可以设置在清洁设备100上,或者可以设置在基站200上;当然也不限于此,例如处理装置300可以为除清洁设备100和基站200之外的装置,如家庭智能终端、总控设备等。In some embodiments, the
本申请实施例提供的清洁设备系统的具体原理和实现方式均与前述实施例的清洁设备清洁图像的处理方法类似,此处不再赘述。The specific principles and implementation methods of the cleaning equipment system provided by the embodiments of the present application are similar to the cleaning image processing method of the cleaning equipment in the previous embodiments, and will not be described again here.
本申请实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时使所述处理器实现上述方法的步骤。Embodiments of the present application also provide a computer-readable storage medium. The computer-readable storage medium stores a computer program. When the computer program is executed by a processor, the processor can implement the steps of the above method.
其中,所述计算机可读存储介质可以是前述任一实施例所述的处理装置的内部存储单元,例如所述处理装置的硬盘或内存。所述计算机可读存储介质也可以是所述处理装置的外部存储设备,例如所述处理装置上配备的插接式硬盘,智能存储卡(Smart Media Card,SMC),安全数字(Secure Digital,SD)卡,闪存卡(Flash Card)等。The computer-readable storage medium may be an internal storage unit of the processing device described in any of the preceding embodiments, such as a hard disk or memory of the processing device. The computer-readable storage medium may also be an external storage device of the processing device, such as a plug-in hard disk, a smart memory card (Smart Media Card, SMC), or a secure digital (SD) equipped on the processing device. ) card, Flash Card, etc.
在一些实施方式中,处理装置300,可以用于实现本申请实施例的清洁设备清洁图像的处理方法的步骤。In some embodiments, the
本申请实施例提供的清洁设备系统的具体原理和实现方式均与前述实施例的清洁设备清洁图像的处理方法类似,此处不再赘述。The specific principles and implementation methods of the cleaning equipment system provided by the embodiments of the present application are similar to the cleaning image processing method of the cleaning equipment in the previous embodiments, and will not be described again here.
清洁设备可用于对地面进行自动清洁,应用场景可以为家庭室内清洁、大型场所清洁等。目前,存在清洁设备无法展示其清洁过程的情形,使得用户无法了解清洁设备的清洁过程,从而影响用户对清洁设备的使用体验。Cleaning equipment can be used to automatically clean the floor. The application scenarios can be household indoor cleaning, large-scale place cleaning, etc. Currently, there are situations where cleaning equipment cannot display its cleaning process, making it impossible for users to understand the cleaning process of the cleaning equipment, thereby affecting the user's experience of using the cleaning equipment.
请参阅图52,图52是本申请实施例提供的一种可视化界面的生成方法的流程示意图。所述可视化界面的生成方法可以应用在清洁设备系统中,用于对系统中的清洁设备的清洁过程进行展示,以实现清洁设备的清洁过程的可视化。Please refer to Figure 52. Figure 52 is a schematic flowchart of a method for generating a visual interface provided by an embodiment of the present application. The method for generating a visual interface can be applied in a cleaning equipment system to display the cleaning process of the cleaning equipment in the system, so as to realize the visualization of the cleaning process of the cleaning equipment.
可选的,清洁设备的清洁过程可以是清洁设备对待清洁区域进行清洁。示例性的,待清洁区域可以为家庭空间、家庭空间的一个房间单元、一个房间单元的部分区域、大型场所或者大型场所的部分区域等任一个待清洁的区域。从另一角度看,待清洁区域可以指首次清洁的较大区域,例如整个房间单元;也可以指对较大区域进行首次清洁后需要进行补漏缺的区域,例如房间单元内的靠墙区域,或者障碍物区域。Optionally, the cleaning process of the cleaning equipment may be that the cleaning equipment cleans the area to be cleaned. For example, the area to be cleaned may be any area to be cleaned such as a family space, a room unit of a family space, a partial area of a room unit, a large place, or a part of a large place. From another perspective, the area to be cleaned can refer to the larger area that is cleaned for the first time, such as the entire room unit; it can also refer to the area that needs to be filled after the first cleaning of the larger area, such as the wall area in the room unit. or obstacle areas.
举例而言,用户在使用清洁设备时,当清洁设备切换执行多种执行事项时,用户在实际使用的时候可能无法察觉到清洁设备的执行事项的切换,则无法了解清洁设备的清洁过程,从而影响用户对清洁设备的使用体验,因此,亟需实现清洁设备的清洁过程的可视化,呈现清洁设备的清洁过程包括的清洁信息,使得用户了解清洁设备的清洁过程,以及记录清洁设备的历史清洁过程,从而提升用户对清洁设备的使用满意度,更进一步地,用户可以基于清洁设备的历史清洁过程个性化调整清洁设备的清洁任务,以更贴合用户的生活习惯,进一步提高用户对清洁设备的使用体验,例如提供一种可视化界面的生成方法。For example, when a user uses a cleaning device and the cleaning device switches to execute multiple execution items, the user may not be aware of the switching of execution items of the cleaning device during actual use, and cannot understand the cleaning process of the cleaning device. It affects the user's experience of using cleaning equipment. Therefore, it is urgent to visualize the cleaning process of cleaning equipment, present the cleaning information included in the cleaning process of cleaning equipment, so that users can understand the cleaning process of cleaning equipment, and record the historical cleaning process of cleaning equipment. , thereby improving the user's satisfaction with the use of the cleaning equipment. Furthermore, the user can personally adjust the cleaning tasks of the cleaning equipment based on the historical cleaning process of the cleaning equipment to better fit the user's living habits and further improve the user's satisfaction with the cleaning equipment. Usage experience, such as providing a method to generate a visual interface.
如图52所示,本申请实施例的可视化界面的生成方法包括步骤S110至步骤S120。As shown in Figure 52, the method for generating a visual interface according to the embodiment of the present application includes steps S110 to S120.
步骤S110、获取清洁设备的全部或部分已完成的执行事项。Step S110: Obtain all or part of the completed execution items of the cleaning equipment.
在一些实施方式中,清洁设备例如为清洁机器人、手持清洁设备、其他用于清洁待清洁区域的设备中的至少一种。举例而言,清洁设备可以对执行的执行事项进行记录,因此,可以根据清洁设备执行的执行事项的记录,获取清洁设备的全部或部分已完成的执行事项。In some embodiments, the cleaning device is, for example, at least one of a cleaning robot, a handheld cleaning device, and other devices for cleaning the area to be cleaned. For example, the cleaning equipment can record the execution items executed. Therefore, all or part of the completed execution items of the cleaning equipment can be obtained based on the record of the execution items executed by the cleaning equipment.
步骤S120、根据获取的清洁设备的全部或部分已完成的执行事项,生成可视化界面,可视化界面用于通过动画指示清洁设备的全部或部分已完成的执行事项。Step S120: Generate a visual interface based on the acquired execution items of all or part of the cleaning equipment. The visual interface is used to indicate all or part of the completed execution items of the cleaning equipment through animation.
可选的,清洁设备在执行清洁任务时的执行事项可以包括移动、执行具体执行动作、执行具体执行动作并移动中的至少一种。在一些实施方式中,当清洁设备在执行清洁任务时,例如可以根据清洁设备当前已完成的全部执行事项生成可视化界面;又例如可以根据清洁设备当前已完成的执行事项中的部分执行事项生成可视化界面。在一些实施方式中,当清洁设备完成清洁任务时,例如可以根据清洁设备全部已完成的执行事项生成可视化界面;又例如可以根据清洁设备已完成的执行事项中的部分执行事项生成可视化界面。举例而言,用于生成可视化界面的执行事项可以是厂家默认设置的执行事项,也可以是用户选择的执行事项,还可以是清洁机器人随机选择的执行事项,在此不做限制。Optionally, the execution items of the cleaning equipment when performing the cleaning task may include at least one of moving, performing a specific execution action, performing a specific execution action and moving. In some implementations, when the cleaning device is performing a cleaning task, for example, a visual interface can be generated based on all execution items currently completed by the cleaning equipment; for example, a visualization interface can be generated based on part of the execution items currently completed by the cleaning equipment. interface. In some embodiments, when the cleaning equipment completes the cleaning task, for example, a visual interface can be generated based on all the execution items completed by the cleaning equipment; or for example, the visual interface can be generated based on part of the execution items completed by the cleaning equipment. For example, the execution items used to generate the visual interface can be the execution items set by the manufacturer by default, the execution items selected by the user, or the execution items randomly selected by the cleaning robot. There are no restrictions here.
在一些实施方式中,根据获取的清洁设备的全部或部分已完成的执行事项,生成可视化界面,可视化界面用于通过动画指示清洁设备的全部或部分已完成的执行事项,包括:当执行事项为移动时:获取预设地图以及清洁设备移动时的运动路径,根据预设地图和运动路径,生成可视化界面,可视化界面用于通过动画指示清洁设备在预设地图上的移动轨迹。In some embodiments, a visual interface is generated based on the acquired execution items of all or part of the cleaning equipment, and the visual interface is used to indicate all or part of the completed execution items of the cleaning equipment through animation, including: when the execution item is When moving: Obtain the preset map and the movement path of the cleaning equipment when moving, and generate a visual interface based on the preset map and movement path. The visual interface is used to indicate the movement trajectory of the cleaning equipment on the preset map through animation.
可选地,预设地图可以是清洁设备响应于建图指令,对当前所在的空间进行探索建立的,或者,可以是清洁设备根据清洁过程中识别的障碍物、地毯等更新的;可选地,预设地图可以是包括用户指定的待清洁区域的预设地图,例如响应于用户选定的待清洁区域例如一个或多个房间,确定该一个或多个房间为预设地图,或者,响应于用户在预设地图上圈出的待清洁区域例如一个或多个房间的部分区域,确定该一个或多个房间的部分区域为预设地图,当然也不限于此。Optionally, the preset map can be established by the cleaning equipment by exploring the current space in response to the mapping instruction, or it can be updated by the cleaning equipment based on obstacles, carpets, etc. identified during the cleaning process; optionally , the preset map may be a preset map including a user-specified area to be cleaned, for example, in response to the user-selected area to be cleaned, such as one or more rooms, determining the one or more rooms as a preset map, or in response to Based on the areas to be cleaned circled by the user on the default map, such as partial areas of one or more rooms, the partial areas of the one or more rooms are determined to be the default map, and of course it is not limited to this.
请参阅图53,响应于清洁设备移动,根据预设地图和运动路径,生成可视化界面,其中,可视化界面根据清洁设备的运动路径在预设地图上生成移动轨迹的动画。示例性的,如图53(a)所示,在预设地图上动态生成移动轨迹对应的虚线。Referring to Figure 53, in response to the movement of the cleaning equipment, a visual interface is generated based on the preset map and movement path, wherein the visualization interface generates an animation of the movement trajectory on the preset map based on the movement path of the cleaning equipment. For example, as shown in Figure 53(a), a dotted line corresponding to the movement trajectory is dynamically generated on the preset map.
还需要说明的是,在一些实施方式中,可视化界面也可以不显示移动轨迹对应的虚线,仍可以看出清洁设备在移动,但是可视化界面未出现移动轨迹,用户可以通过清洁设备的移动观察出清洁设备的移动轨迹。通过动画指示清洁设备在预设地图上的移动轨迹,从而实现清洁设备在清洁过程中移动的可视化,有利于提高用户对清洁设备的使用体验。It should also be noted that in some embodiments, the visual interface may not display the dotted line corresponding to the movement trajectory. It can still be seen that the cleaning equipment is moving, but no movement trajectory appears on the visual interface. The user can observe through the movement of the cleaning equipment. Movement trajectory of cleaning equipment. The animation indicates the movement trajectory of the cleaning equipment on the preset map, thereby visualizing the movement of the cleaning equipment during the cleaning process, which is beneficial to improving the user's experience of using the cleaning equipment.
在一些实施方式中,根据获取的清洁设备的全部或部分已完成的执行事项,生成可视化界面,可视化界面用于通过动画指示清洁设备的全部或部分已完成的执行事项,包括:当执行事项为执行具体执行动作时:获取清洁设备的具体执行动作,根据具体执行动作,生成可视化界面,可视化界面用于通过动画指示清洁设备的具体执行动作。In some embodiments, a visual interface is generated based on the acquired execution items of all or part of the cleaning equipment, and the visual interface is used to indicate all or part of the completed execution items of the cleaning equipment through animation, including: when the execution item is When performing a specific execution action: obtain the specific execution action of the cleaning equipment, and generate a visual interface based on the specific execution action. The visual interface is used to indicate the specific execution action of the cleaning equipment through animation.
举例而言,当清洁设备确定执行事项为具体执行动作后,通过动画显示清洁设备正在执行具体执行动作,从而用户在观看可视化界面的动画时,可以通过清洁设备的具体执行动作判断清洁设备执行的执行事项,有利于实现清洁设备的具体执行动作的可视化,提高用户对清洁设备的使用体验。For example, when the cleaning equipment determines that the execution item is a specific execution action, the animation shows that the cleaning equipment is performing the specific execution action. Therefore, when the user watches the animation on the visual interface, the user can judge the specific execution action of the cleaning equipment through the specific execution action of the cleaning equipment. Execution matters are conducive to visualizing the specific execution actions of the cleaning equipment and improving the user's experience of using the cleaning equipment.
可选地,在根据具体执行动作,生成可视化界面之后,还包括:获取清洁设备执行具体执行动作所覆盖的区域对应的脏污程度;以及,根据清洁设备执行具体执行动作所覆盖的区域对应的脏污程度,确定可视化界面上清洁设备执行具体执行动作所覆盖的区域的显示效果。Optionally, after generating the visual interface according to the specific execution action, it also includes: obtaining the degree of contamination corresponding to the area covered by the cleaning device executing the specific execution action; and, according to the degree of contamination corresponding to the area covered by the cleaning device executing the specific execution action. The degree of dirtiness determines the display effect of the area covered by the specific execution actions of the cleaning equipment on the visual interface.
举例而言,具体执行动作例如为扫地、拖地、扫拖地同时进行或其他具体执行动作。清洁设备在执行具体执行动作之后可以确定执行具体执行动作所覆盖的区域对应的脏污程度,则可以根据清洁设备执行具体执行动作所覆盖的区域对应的脏污程度,在可视化界面上动态生成清洁设备执行具体执行动作所覆盖的区域的显示效果。示例性的,在可视化界面上动态显示清洁设备执行具体执行动作所覆盖的区域的显示效果,如图54灰色区域所示,例如,显示效果例如为色彩的深浅,其中,预设清洁区域的脏污程度越高,色彩越深。随着清洁设备执行具体执行动作的时间的推移,可视化界面上清洁设备执行具体执行动作所覆盖的区域的显示效果例如为由较浅的色彩或者透明色逐渐变化成预设清洁区域的脏污程度对应 的较深的色彩,从而用户在观看可视化界面的动画时,可以通过清洁设备执行具体执行动作所覆盖的区域的显示效果了解预设清洁区域的脏污程度,有利于实现清洁设备在清洁过程中确定的预设清洁区域的脏污程度的可视化,提高用户对清洁设备的使用体验。当然清洁设备执行具体执行动作所覆盖的区域的显示效果也不限于此,例如显示效果还包括线条的疏密、阴影的深浅、图案的疏密、数值的大小或其他显示效果,在此不做限制。For example, the specific execution actions include sweeping, mopping, sweeping and mopping at the same time, or other specific execution actions. After the cleaning equipment performs the specific execution action, it can determine the degree of contamination corresponding to the area covered by the specific execution action. Then it can dynamically generate cleaning on the visual interface based on the degree of contamination corresponding to the area covered by the specific execution action by the cleaning equipment. The display effect of the area covered by the specific execution actions of the device. Exemplarily, the display effect of the area covered by the specific execution action of the cleaning equipment is dynamically displayed on the visual interface, as shown in the gray area in Figure 54. For example, the display effect is, for example, the depth of the color, where the dirtiness of the preset cleaning area is The higher the degree of dirt, the darker the color. As time goes by while the cleaning equipment performs specific execution actions, the display effect of the area covered by the cleaning equipment's specific execution actions on the visual interface, for example, gradually changes from a lighter color or a transparent color to the degree of dirtiness of the preset cleaning area. The corresponding darker color allows users to understand the degree of dirtiness of the preset cleaning area through the display effect of the area covered by the specific execution actions of the cleaning equipment when watching the animation of the visual interface, which is conducive to the realization of the cleaning process of the cleaning equipment. The visualization of the degree of dirtiness of the preset cleaning area determined in the system improves the user's experience of using the cleaning equipment. Of course, the display effect of the area covered by the specific execution actions of the cleaning equipment is not limited to this. For example, the display effect also includes the density of lines, the depth of shadows, the density of patterns, the size of numerical values or other display effects, which are not discussed here. limit.
在一些实施方式中,根据获取的清洁设备的全部或部分已完成的执行事项,生成可视化界面,可视化界面用于通过动画指示清洁设备的全部或部分已完成的执行事项,包括:当执行事项为执行具体执行事项并移动时:获取预设地图以及清洁设备移动时的运动路径,以及具体执行动作,其中,清洁设备基于运动路径移动时执行具体执行动作,根据预设地图和运动路径,以及具体执行动作,生成可视化界面,可视化界面用于通过动画指示清洁设备在预设地图上的移动轨迹和移动时执行的具体执行动作。In some embodiments, a visual interface is generated based on the acquired execution items of all or part of the cleaning equipment, and the visual interface is used to indicate all or part of the completed execution items of the cleaning equipment through animation, including: when the execution item is When executing specific execution items and moving: Obtain the preset map and the movement path of the cleaning equipment when moving, as well as specific execution actions. Among them, the cleaning equipment performs specific execution actions when moving based on the movement path. According to the preset map and movement path, and specific execution actions Execute the action to generate a visual interface. The visual interface is used to indicate through animation the movement trajectory of the cleaning equipment on the preset map and the specific execution actions performed when moving.
举例而言,预设地图的具体原理和实施方式可以参照前述,在此不再赘述。当清洁设备确定执行事项为执行具体执行动作并移动后,则按照运动路径移动时以具体执行动作执行该执行事项。例如,在可视化界面上显示清洁设备根据运动路径在预设地图上移动的动画,以通过动画指示清洁设备在预设地图上的移动轨迹,同时,显示清洁设备在移动时以具体执行动作执行该执行事项,从而用户在观看可视化界面的动画时,可以通过预设地图上清洁设备的移动轨迹,以及清洁设备在移动时的具体执行动作判断清洁设备执行的执行事项,有利于实现清洁设备的移动以及具体执行动作的可视化,提高用户对清洁设备的使用体验。For example, the specific principles and implementation methods of the preset map can be referred to the above, and will not be described again here. When the cleaning equipment determines that the execution item is to perform a specific execution action and moves, the execution item is executed with a specific execution action when moving according to the movement path. For example, the animation of the cleaning equipment moving on the preset map according to the movement path is displayed on the visual interface to indicate the movement trajectory of the cleaning equipment on the preset map through animation. At the same time, it is displayed that the cleaning equipment performs the specific execution action when moving. Execution items, so that when users watch the animation of the visual interface, they can judge the execution items of the cleaning equipment through the movement trajectory of the cleaning equipment on the preset map and the specific execution actions of the cleaning equipment when moving, which is conducive to the movement of the cleaning equipment. And the visualization of specific execution actions improves the user's experience of using cleaning equipment.
可选地,在根据预设地图和运动路径,以及具体执行动作,生成可视化界面之后,还包括:获取清洁设备执行具体执行动作并移动所覆盖的区域对应的脏污程度;以及,根据清洁设备执行具体执行动作并移动所覆盖的区域对应的脏污程度,确定可视化界面上清洁设备执行具体执行动作并移动所覆盖的区域的显示效果。Optionally, after generating the visual interface based on the preset map, movement path, and specific execution actions, it also includes: obtaining the degree of contamination corresponding to the area covered by the specific execution actions and movement of the cleaning equipment; and, according to the cleaning equipment The degree of dirtiness corresponding to the area covered by performing specific execution actions and moving is determined, and the display effect of the area covered by the cleaning equipment performing specific execution actions and moving is determined on the visual interface.
举例而言,具体执行动作并移动例如为扫地并移动、拖地并移动、扫拖地同时进行并移动或其他具体执行动作并移动。清洁设备在执行具体执行动作并移动之后可以确定执行具体执行动作并移动所覆盖的区域对应的脏污程度,则可以根据清洁设备执行具体执行动作并移动所覆盖的区域对应的脏污程度,在可视化界面上动态生成清洁设备执行具体执行动作并移动所覆盖的区域的显示效果。示例性的,如图53(b)所示,在可视化界面上动态显示清洁设备执行具体执行动作并移动所覆盖的区域的显示效果,例如,显示效果例如为色彩的深浅,其中,预设清洁区域的脏污程度越高,色彩越深。随着清洁设备执行具体执行动作并移动的时间的推移,可视化界面上生成清洁设备在预设地图上的移动轨迹,如图53(b)虚线所示,同时清洁设备执行具体执行动作并移动所覆盖的区域的显示效果例如为由较浅的色彩或者透明色逐渐变化成预设清洁区域的脏污程度对应的较深的色彩,如图53(b)灰色区域所示,从而用户在观看可视化界面的动画时,可以了解清洁设备的运动路径以及通过清洁设备执行具体执行动作并移动所覆盖的区域的显示效果了解预设清洁区域的脏污程度,有利于实现清洁设备的运动路径的可视化,以及实现清洁设备在清洁过程中确定的预设清洁区域的脏污程度的可视化,提高用户对清洁设备的使用体验。当然清洁设备执行具体执行动作并移动所覆盖的区域的显示效果也不限于此,例如显示效果还包括线条的疏密、阴影的深浅、图案的疏密、数值的大小或其他显示效果。当然,由于动画是在播放的,响应于清洁设备移动,可视化界面可以看出清洁设备在移动,但是可视化界面未出现移动轨迹,用户可以通过清洁设备的移动观察出清洁设备的移动轨迹。在此不做限制。For example, specifically performing actions and moving may be sweeping and moving, mopping and moving, sweeping and mopping simultaneously and moving, or other specific performing actions and moving. After the cleaning equipment performs the specific execution action and moves, it can determine the degree of contamination corresponding to the area covered by the specific execution action and movement. Then, the degree of contamination corresponding to the area covered by the specific execution action and movement of the cleaning equipment can be determined. The display effect of the cleaning equipment performing specific actions and moving the covered area is dynamically generated on the visual interface. Exemplarily, as shown in Figure 53(b), the display effect of the cleaning equipment performing specific actions and moving the covered area is dynamically displayed on the visual interface. For example, the display effect is, for example, the depth of color, where the preset cleaning The more soiled the area, the darker the color. As time goes by as the cleaning equipment performs specific actions and moves, the movement trajectory of the cleaning equipment on the preset map is generated on the visual interface, as shown in the dotted line in Figure 53(b). At the same time, the cleaning equipment performs specific actions and moves. For example, the display effect of the covered area gradually changes from a lighter color or a transparent color to a darker color corresponding to the degree of dirtiness of the preset cleaning area, as shown in the gray area in Figure 53(b), so that the user is watching the visualization. During the animation of the interface, you can understand the movement path of the cleaning equipment and the display effect of the cleaning equipment performing specific actions and moving the covered area to understand the degree of dirtiness of the preset cleaning area, which is conducive to the visualization of the movement path of the cleaning equipment. And realize the visualization of the degree of dirtiness of the preset cleaning area determined by the cleaning equipment during the cleaning process, so as to improve the user's experience of using the cleaning equipment. Of course, the display effect of the area covered by the specific action and movement of the cleaning equipment is not limited to this. For example, the display effect also includes the density of lines, the depth of shadows, the density of patterns, the size of numerical values, or other display effects. Of course, since the animation is playing, in response to the movement of the cleaning equipment, the visual interface can see that the cleaning equipment is moving, but no movement trajectory appears on the visualization interface. The user can observe the movement trajectory of the cleaning equipment through the movement of the cleaning equipment. There are no restrictions here.
在一些实施方式中,请结合图53(b)参阅图54,当清洁设备的执行事项执行完毕时,如图54所示,清洁设备对客厅拖地并移动完毕时,并且清洁设备扫地并移动所覆盖的区域为客厅,则根据客厅的显示效果,可以提示用户客厅需要重复拖地并移动,例如还可以显示“准备重复清洁”的文字,以提示用户清洁设备的执行事项,从而提高用户的使用体验。In some embodiments, please refer to Figure 54 in conjunction with Figure 53(b). When the execution of the cleaning equipment is completed, as shown in Figure 54, when the cleaning equipment completes mopping and moving the living room floor, the cleaning equipment sweeps and moves the floor. The area covered is the living room. According to the display effect of the living room, the user can be prompted that the living room needs to be repeatedly mopped and moved. For example, the text "Prepare for repeated cleaning" can also be displayed to prompt the user to perform cleaning equipment, thereby improving the user's comfort. Use experience.
示例性的,动画包括角色标识,其中,角色标识用于指代清洁设备。举例而言,根据 执行事项,生成可视化界面,可视化界面用于通过动画指示清洁设备全部或部分已完成的执行事项,包括:根据执行事项,确定角色标识对应的执行动作,其中,动画用于指示角色标识对应的执行动作。Exemplarily, the animation includes a character identification, where the character identification is used to refer to the cleaning equipment. For example, a visual interface is generated based on the execution items. The visual interface is used to indicate all or part of the execution items completed by the cleaning equipment through animation, including: determining the execution actions corresponding to the role identification according to the execution items, wherein the animation is used to indicate The execution action corresponding to the role ID.
可选的,角色标识包括角色形象、文字标识、执行机构标识中的至少一种。举例而言,根据执行事项,确定角色标识对应的执行动作,包括:当清洁设备的执行事项为移动时,动画显示预设的角色形象、文字标识、执行机构标识中的至少一种的移动;当清洁设备的执行事项为执行具体执行动作时,动画显示具体执行动作对应的执行动作角色形象、执行动作文字标识、执行动作执行结构标识中的至少一种;当清洁设备的执行事项为执行具体执行动作并移动时,动画显示具体执行动作对应的执行动作角色形象、执行动作文字标识、执行动作执行结构标识中的至少一种;当清洁设备的执行事项为执行具体执行动作并移动时,动画显示具体执行动作对应的执行动作角色、执行动作文字标识、执行动作执行结构标识中的至少一种,并且,显示具体执行动作对应的执行动作角色标识、执行动作文字标识、执行动作执行结构标识中的至少一种的移动。Optionally, the role identification includes at least one of a role image, a text identification, and an executive agency identification. For example, determining the execution action corresponding to the character identification according to the execution item includes: when the execution item of the cleaning equipment is movement, the animation displays the movement of at least one of the preset character image, text identification, and execution agency identification; When the execution matter of the cleaning equipment is to perform a specific execution action, the animation displays at least one of the execution action character image, the execution action text identifier, and the execution action execution structure identifier corresponding to the specific execution action; when the execution matter of the cleaning equipment is to execute a specific execution action When the action is executed and moved, the animation displays at least one of the execution action character image, the execution action text identifier, and the execution action execution structure identifier corresponding to the specific execution action; when the execution item of the cleaning equipment is to execute the specific execution action and move, the animation Display at least one of the execution action role, execution action text ID, and execution action execution structure ID corresponding to the specific execution action, and display the execution action role ID, execution action text ID, and execution action execution structure ID corresponding to the specific execution action. at least one movement.
在一些实施方式中,当清洁设备的执行事项为移动时,角色形象例如为Q版鲸灵,例如,动画显示Q版鲸灵的运动路径为从预设地图上的当前位置移动至目标位置,其中,Q版鲸灵的运动路径根据清洁设备的运动路径确定。举例而言,请参阅图55,当清洁设备的执行事项为移动至基站时,若可视化界面显示的预设地图上包括基站,确定基站的位置为目标位置,并通过动画动态显示Q版鲸灵从当前位置移动至基站位置,并跟随着Q版鲸灵的移动在预设地图上动态生成Q版鲸灵的移动轨迹或者在预设地图上动态移动。同理,当清洁设备的执行事项为移动时,文字标识例如为“清洁机器人”的文字,举例而言,动画显示“机器人”的文字的运动路径为从预设地图上的当前位置移动至目标位置,并可以跟随着“机器人”的文字的移动在预设地图上动态生成“机器人”的移动轨迹,也可以“机器人”的文字的移动但不生成移动轨迹;当清洁设备的执行事项为移动时,执行结构标识例如为运动机构如轮子,举例而言,动画显示轮子旋转并且轮子的运动路径为从预设地图上的当前位置移动至目标位置,并跟随着轮子的移动在预设地图上动态生成轮子的移动轨迹,也可以不生成移动轨迹。当然也不限于此,在一些实施方式中,当清洁设备的执行事项为执行具体执行动作时,示例性的,执行动作角色形象例如为携带着Q版清洁工具的Q版鲸灵。举例而言,当清洁设备的执行事项为扫地时,通过动画显示携带着Q版扫把的Q版鲸灵在当前位置交替朝向左侧执行扫地动作以及朝向右侧执行扫地动作。同理,当清洁设备的执行事项为执行具体执行动作,例如扫地,执行动作文字标识例如为“机器人正在扫地”的文字,举例而言,如图56所示,用简单图示例如黑点表现出清洁设备的当前位置,动画显示“机器人正在扫地”的文字在当前位置循环地从左至右进行播放;当清洁设备的执行事项为执行具体执行动作,例如扫地,执行动作执行结构标识例如为边刷,举例而言,动画显示边刷在当前位置旋转。当然执行动作角色形象、执行动作文字标识、执行动作执行结构标识中的任意一种也不限于此。In some embodiments, when the execution item of the cleaning equipment is movement, the character image is, for example, the Q version of the whale spirit. For example, the animation shows that the movement path of the Q version of the whale spirit is to move from the current position on the preset map to the target position. Among them, the movement path of the Q version of Whale Spirit is determined based on the movement path of the cleaning equipment. For example, please refer to Figure 55. When the execution item of the cleaning equipment is to move to the base station, if the base station is included in the default map displayed on the visual interface, the location of the base station is determined as the target position, and the Q version of Whale Spirit is dynamically displayed through animation. Move from the current position to the base station position, and follow the movement of the Q version of the whale spirit to dynamically generate the movement trajectory of the Q version of the whale spirit on the preset map or dynamically move on the preset map. Similarly, when the execution item of the cleaning equipment is movement, the text mark is, for example, the text "Cleaning Robot". For example, the motion path of the animated text "Robot" is to move from the current position on the preset map to the target. position, and can dynamically generate the movement trajectory of the "robot" on the preset map following the movement of the text "robot", or the movement of the text "robot" without generating a movement trajectory; when the execution item of the cleaning equipment is to move When the execution structure identifier is, for example, a motion mechanism such as a wheel, for example, the animation shows that the wheel rotates and the movement path of the wheel is to move from the current position on the preset map to the target position, and follow the movement of the wheel on the preset map Dynamically generate the movement trajectory of the wheel, or not generate the movement trajectory. Of course, it is not limited to this. In some embodiments, when the execution item of the cleaning equipment is to perform a specific execution action, for example, the execution action character image is, for example, a Q-version whale spirit carrying a Q-version cleaning tool. For example, when the execution task of the cleaning equipment is sweeping the floor, the animation shows that the Q-version whale spirit carrying the Q-version broom alternately performs the sweeping action toward the left and the right at the current position. In the same way, when the execution item of the cleaning equipment is to perform a specific execution action, such as sweeping the floor, the execution action text mark is, for example, the text "The robot is sweeping the floor". For example, as shown in Figure 56, it is represented by a simple diagram such as a black dot. The current position of the cleaning equipment is displayed, and the text "The robot is sweeping the floor" is displayed in the animation and played cyclically from left to right at the current position; when the execution item of the cleaning equipment is to perform a specific execution action, such as sweeping the floor, the execution action execution structure identifier is, for example, Side Brush, for example, animates the side brush rotating at its current position. Of course, any one of the execution action character image, the execution action text mark, and the execution action execution structure mark is not limited to this.
在一些实施方式中,当清洁设备的执行事项为执行具体执行动作并移动时,例如,扫地并移动时,动画显示执行动作角色形象例如携带着Q版扫把的Q版鲸灵交替朝向左侧执行扫地动作以及朝向右侧执行扫地动作的同时从当前位置移动至目标位置,并跟随着携带着Q版扫把的Q版鲸灵的移动在预设地图上动态生成携带着Q版扫把的Q版鲸灵的移动轨迹或者只在预设地图上动态移动。同理,当清洁设备的执行事项为执行具体执行动作并移动时,例如扫地并移动时,举例而言,动画显示执行动作文字标识例如“机器人正在扫地”的文字循环地从左至右进行播放的同时从当前位置移动至目标位置,并跟随着“机器人正在扫地”的文字的移动在预设地图上动态生成“机器人正在扫地”的文字的移动轨迹或者“机器人正在扫地”的文字的移动但不生成移动轨迹;当清洁设备的执行事项为执行具体执行动作并移动时,例如扫地并移动时,举例而言,如图57所示,动画显示执行动作执行结构标识例如边刷旋转的同时从当前位置移动至目标位置,并跟随着边刷的移动在预设地图上动态生成边刷 的移动轨迹或者只在预设地图上动态移动。In some embodiments, when the execution item of the cleaning equipment is to perform a specific action and move, for example, when sweeping the floor and moving, the animation displays the image of the character performing the action, such as the Q version of the whale spirit carrying the Q version of the broom, alternately performing towards the left While sweeping the floor and performing the sweeping action to the right, move from the current position to the target position, and follow the movement of the Q-version whale spirit carrying the Q-version broom to dynamically generate the Q-version whale carrying the Q-version broom on the preset map. The spirit's movement trajectory may only dynamically move on the preset map. In the same way, when the execution item of the cleaning equipment is to perform a specific action and move, such as sweeping the floor and moving, for example, the animation displays the text mark of the execution action, such as the text "The robot is sweeping the floor" and plays it cyclically from left to right. At the same time, it moves from the current position to the target position, and follows the movement of the text "The robot is sweeping the floor" to dynamically generate the movement trajectory of the text "the robot is sweeping the floor" or the movement of the text "the robot is sweeping the floor" on the preset map. No movement trajectory is generated; when the execution item of the cleaning equipment is to perform a specific action and move, such as sweeping the floor and moving, for example, as shown in Figure 57, the animation displays the execution structure identifier of the execution action, such as the side brush rotating while The current position moves to the target position, and following the movement of the side brush, the movement trajectory of the side brush is dynamically generated on the preset map, or it only dynamically moves on the preset map.
可选地,动画还可以对角色形象、文字标识、执行结构标识中的至少两种进行组合显示。举例而言,如图58所示,当清洁设备的执行事项为执行具体执行动作并移动时,例如,扫地并移动时,动画显示执行动作文字标识例如“机器人正在扫地”的文字循环地从左至右进行播放以及显示执行动作执行结构标识例如边刷旋转的同时显示“机器人正在扫地”的文字以及边刷从当前位置移动至目标位置,并跟随着“机器人正在扫地”的文字以及边刷的移动在预设地图上动态生成其移动轨迹或者只移动,不生成移动轨迹。当然也不限于此,例如,当清洁设备的执行事项为移动至基站并清洗拖擦件时,动画显示执行动作角色形象例如携带着Q版拖布的Q版鲸灵以及显示执行动作执行结构标识例如拖布,并显示携带着Q版拖布的Q版鲸灵以及拖布移动至基站,同时跟随着携带着Q版拖布的Q版鲸灵以及拖布的移动动态生成其移动轨迹或者只移动,不生成移动轨迹,并且,当动画显示携带着Q版拖布的Q版鲸灵以及拖布处于基站对应的位置时,动画显示携带着Q版拖布的Q版鲸灵对携带着的Q版拖布进行揉搓清洗以及拖布旋转,在此不作限制。Optionally, the animation can also combine and display at least two of the character image, text logo, and execution structure logo. For example, as shown in Figure 58, when the execution item of the cleaning equipment is to perform a specific execution action and move, for example, sweeping the floor and moving, the animation displays the execution action text mark, such as the text "The robot is sweeping the floor" cyclically from the left to the right to play and display the execution structure logo of the execution action. For example, the side brush rotates while displaying the text "The robot is sweeping the floor" and the side brush moves from the current position to the target position, and follows the text "The robot is sweeping the floor" and the side brush. The movement dynamically generates its movement trajectory on the preset map or only moves without generating a movement trajectory. Of course, it is not limited to this. For example, when the execution item of the cleaning equipment is to move to the base station and clean the mop parts, the animation displays the execution action character image, such as the Q version whale spirit carrying the Q version mop, and displays the execution action execution structure identifier, such as Mop, and display the Q version of the whale spirit carrying the Q version of the mop and the mop moving to the base station, and at the same time follow the movement of the Q version of the whale spirit and the mop carrying the Q version of the mop to dynamically generate its movement trajectory or only move without generating a movement trajectory , and when the animation shows that the Q version of the whale spirit carrying the Q version of the mop and the mop are at the corresponding position of the base station, the animation shows that the Q version of the whale spirit carrying the Q version of the mop rubs and cleans the Q version of the mop and rotates the mop. , there is no restriction here.
当然也不限于此,示例性的,当清洁设备的执行事项为执行具体执行动作并移动时,执行动作角色标识、执行动作文字标识、执行动作执行结构标识也可以在可视化界面上的一位置上固定显示,例如执行动作角色标识例如携带着Q版扫把的Q版鲸灵在该位置内维持走路并扫地的动作,例如执行动作文字标识例如“机器人正在扫地”的文字在该位置上滚动并跳动显示,例如执行动作执行结构标识例如边刷在该位置对应的范围内原地转动并跳动,以指示清洁设备的执行事项包括执行具体执行动作并移动,可选地,随着时间的推移,在可视化界面上动态生成清洁设备的移动轨迹,以指示清洁设备的移动轨迹。举例而言,可视化界面上的执行动作角色标识、执行动作文字标识、执行动作执行结构标识中的至少一种可用于指示清洁设备的执行事项为执行具体执行动作并移动即可,并不对可视化界面上的动画中执行动作角色标识、执行动作文字标识、执行动作执行结构标识中的至少一种如何显示进行限制。Of course, it is not limited to this. For example, when the execution item of the cleaning equipment is to perform a specific execution action and move, the execution action role identifier, the execution action text identifier, and the execution action execution structure identifier can also be at a position on the visual interface. Fixed display, such as performing action character identification, such as the Q version of the whale spirit carrying a Q version broom, maintaining the action of walking and sweeping the floor in the position, such as performing action text identification, such as "The robot is sweeping the floor" The text scrolls and jumps in this position Display, for example, the execution structure identification of the execution action, for example, the side brush rotates and jumps in place within the range corresponding to the position, to indicate that the execution matters of the cleaning equipment include performing specific execution actions and moving, optionally, over time, in the visualization The movement trajectory of the cleaning equipment is dynamically generated on the interface to indicate the movement trajectory of the cleaning equipment. For example, at least one of the execution action role identifier, the execution action text identifier, and the execution action execution structure identifier on the visual interface can be used to indicate that the execution item of the cleaning equipment is to perform a specific execution action and move it, and does not affect the visual interface. Limit how to display at least one of the execution action character identifier, execution action text identifier, and execution action execution structure identifier in the animation.
在一些实施方式中,角色标识还包括机体标识。示例性的,当清洁设备的执行事项为执行具体执行动作并移动时,动画显示具体执行动作对应的执行动作角色形象、执行动作文字标识、执行动作执行结构标识中的至少一种,并且,显示机体标识移动。In some embodiments, the character identification also includes an organism identification. For example, when the execution item of the cleaning equipment is to perform a specific execution action and move, the animation displays at least one of the execution action character image, the execution action text identifier, and the execution action execution structure identifier corresponding to the specific execution action, and displays The body logo moves.
举例而言,请参阅图59,当清洁设备的执行事项为执行具体执行动作并移动时,可以对执行动作角色形象、执行动作文字标识、执行动作执行结构标识中的至少一种与机体标识进行组合显示。示例性的,当清洁设备的执行事项为扫地并移动时,动画显示清洁设备的执行动作文字标识例如为“天气真好,我准备扫100平,干两小时”,示例性的,“扫100平”、“干两小时”等文字可以根据清洁设备执行清洁任务对应的信息进行更新,同时,动画显示机体标识例如以清洁设备的顶视图作为清洁设备的机体标识移动,并跟随着机体标识的移动动态生成机体标识的移动轨迹。同理,机体标识也可以结合执行动作角色形象,执行动作执行结构标识来动画显示清洁设备的执行事项为执行具体执行动作并移动,当然也不限于此,例如,结合前述当清洁设备的执行事项为执行具体执行动作并移动时,动画显示执行动作角色形象、执行动作文字标识、执行动作执行结构标识中至少一种执行具体执行动作并移动,以及,显示机体标识移动,在此不做限制。当然也不限于此,示例性的,当清洁设备的执行事项为执行具体执行动作并移动时,执行动作角色形象、执行动作文字标识、执行动作执行结构标识中的至少一种与机体标识可以跟随着机体标识移动,例如在同一区域同时显示执行动作角色标识、执行动作文字标识、执行动作执行结构标识中的至少一种以及机体标识,也可以不跟随着机体标识移动,如图59所示,分别在不同区域显示执行动作角色形象、执行动作文字标识、执行动作执行结构标识中的至少一种以及机体标识,示例性的,执行动作角色形象、执行动作文字标识、执行动作执行结构标识中的至少一种在可视化界面的一区域范围内跳动并执行具体执行动作,以指示清洁设备的执行事项包括执行具体执行动作并移动。 又例如,当清洁设备的执行事项为执行具体执行事项并移动时,机体标识也可以不移动,例如在可视化界面的一固定区域内维持跳跃动作,可选地,随着时间的推移,在可视化界面上动态生成清洁设备的移动轨迹,以指示清洁设备的移动轨迹。举例而言,可视化界面上的执行动作角色标识、执行动作文字标识、执行动作执行结构标识中的至少一种以及机体标识可用于指示清洁设备的执行事项为执行具体执行动作并移动即可,并不对可视化界面上的动画中执行动作角色标识、执行动作文字标识、执行动作执行结构标识中的至少一种以及机体标识中的至少一种如何显示进行限制。For example, please refer to Figure 59. When the execution item of the cleaning equipment is to perform a specific execution action and move, at least one of the execution action character image, the execution action text identifier, and the execution action execution structure identifier can be combined with the body identifier. Combined display. For example, when the execution item of the cleaning equipment is sweeping and moving, the animation displays the execution action text mark of the cleaning equipment, for example, "The weather is really nice, I am going to sweep 100 square meters and work for two hours." For example, "Sweep 100 square meters." Texts such as "flat" and "dry for two hours" can be updated based on the information corresponding to the cleaning tasks performed by the cleaning equipment. At the same time, the animation displays the body logo. For example, the top view of the cleaning equipment is used as the body logo of the cleaning equipment to move and follow the movement of the body logo. The movement dynamically generates the movement trajectory of the body logo. In the same way, the body logo can also be combined with the execution action character image and the execution action execution structure logo to animate the execution items of the cleaning equipment to perform specific execution actions and move. Of course, it is not limited to this. For example, combined with the aforementioned execution items of the cleaning equipment When performing a specific execution action and moving, the animation displays at least one of the execution action character image, the execution action text mark, and the execution action execution structure mark to perform the specific execution action and move, and displays the body mark movement, which is not limited here. Of course, it is not limited to this. For example, when the execution item of the cleaning equipment is to perform a specific execution action and move, at least one of the execution action character image, the execution action text identification, the execution action execution structure identification and the body identification can follow Moving with the body logo, for example, at least one of the execution action character logo, the execution action text logo, the execution action execution structure logo, and the body logo are simultaneously displayed in the same area, or the body logo does not need to be moved, as shown in Figure 59. At least one of the execution action character image, the execution action text logo, the execution action execution structure logo, and the body logo are displayed in different areas. For example, among the execution action character image, the execution action text logo, and the execution action execution structure logo, At least one method jumps and performs specific execution actions within a region of the visual interface to instruct the cleaning equipment to perform execution items and move. For another example, when the execution item of the cleaning equipment is to execute a specific execution item and move, the body logo may not move, for example, maintaining a jumping action in a fixed area of the visual interface. Optionally, as time goes by, in the visualization The movement trajectory of the cleaning equipment is dynamically generated on the interface to indicate the movement trajectory of the cleaning equipment. For example, at least one of the execution action character identifier, the execution action text identifier, the execution action execution structure identifier, and the body identifier on the visual interface can be used to indicate that the execution matter of the cleaning equipment is to perform a specific execution action and move it, and There is no restriction on how at least one of the execution action character identification, the execution action text identification, the execution action execution structure identification, and the body identification in the animation on the visual interface is displayed.
示例性的,当具体执行动作为移动至基站并清洗拖擦件时,请参阅图61,动画例如可以显示清洗拖擦件文字标识如“小鲸灵提着拖布回家清洗拖布啦”;动画例如还可以显示清洗拖布角色形象如携带着Q版拖布的Q版鲸灵移动至基站位置,并当携带着Q版拖布的Q版鲸灵处于基站位置时,动画显示Q版鲸灵对Q版拖布进行揉搓清洗;动画例如还可以显示清洗拖擦件执行机构标识如拖布移动至基站,并当拖布处于基站位置时,动画显示流动水流对拖布进行冲洗,当然也不限于此,例如可以对上述清洗拖擦件文字标识、清洗拖擦件角色形象、清洗拖擦件执行结构中的至少两项进行组合显示,在此不作限制。For example, when the specific execution action is to move to the base station and clean the mop piece, please refer to Figure 61. For example, the animation can display a text mark of the cleaning mop piece such as "Little Whale Spirit is carrying the mop home to clean the mop"; animation For example, the cleaning mop character image can also be displayed, such as the Q version of the whale spirit carrying the Q version of the mop moving to the base station position, and when the Q version of the whale spirit carrying the Q version of the mop is at the base station position, the animation shows the Q version of the whale spirit versus the Q version. The mop is rubbed and cleaned; for example, the animation can also display the logo of the cleaning mop actuator, such as the mop moving to the base station, and when the mop is at the base station, the animation displays the flowing water flowing to rinse the mop. Of course, it is not limited to this. For example, the above-mentioned At least two of the text logo of the cleaning and mopping part, the character image of the cleaning and mopping part, and the execution structure of the cleaning and mopping part are displayed in combination, which is not limited here.
依此类推,当具体执行动作为移动至基站并清洗拖擦件以外的具体执行动作时,也可以通过动画显示相应的执行动作文字标识、执行动作角色形象、执行动作执行结构标识中的至少一种,例如接收指令时,动画例如可以显示接收指令文字标识如“我出来努力工作啦”,在此不作限制。By analogy, when the specific execution action is a specific execution action other than moving to the base station and cleaning the dragged parts, at least one of the corresponding execution action text identifier, execution action character image, and execution action execution structure identifier can also be displayed through animation. For example, when receiving an instruction, the animation may display a text mark for receiving the instruction, such as "I am here to work hard", which is not limited here.
示例性的,具体执行动作包括拖地、扫地、扫拖地同时进行、清洁地毯、清洗拖擦件、重复清洁、沿边补漏、边刷交替收展、障碍物探索、执行任务中途充电、障碍物跨越、脱困、接收指令、特定区域清洁中的至少一种,当然也不限于此。For example, specific execution actions include mopping, sweeping, sweeping and mopping at the same time, cleaning carpets, cleaning mopping parts, repeated cleaning, edge leak repair, alternate extension of edge brushes, obstacle exploration, charging midway during tasks, and obstacles. At least one of crossing over, getting out of trouble, receiving instructions, and cleaning a specific area, but is certainly not limited to this.
举例而言,当具体执行动作为拖地时,动画显示拖地角色形象、拖地文字标识、拖地执行结构标识中的至少一种;当具体执行动作为扫地时,动画显示扫地角色形象、扫地文字标识、扫地执行结构标识中的至少一种;当具体执行动作为扫拖地同时进行时,动画显示扫拖地角色形象、扫拖地文字标识、扫拖地执行结构标识中的至少一种;当具体执行动作为清洁地毯时,动画显示清洁地毯角色形象、清洁地毯文字标识、清洁地毯执行结构标识中的至少一种。For example, when the specific execution action is mopping the floor, the animation displays at least one of the mopping character image, the mopping text logo, and the mopping execution structure logo; when the specific execution action is sweeping the floor, the animation displays the sweeping character image, At least one of the sweeping text logo and the sweeping and mopping execution structure logo; when the specific execution action is to sweep and mop the floor at the same time, the animation displays at least one of the sweeping and mopping character image, the sweeping and mopping text logo, and the sweeping and mopping execution structure logo. kind; when the specific execution action is carpet cleaning, the animation displays at least one of a cleaning carpet character image, a cleaning carpet text logo, and a cleaning carpet execution structure logo.
在一些实施方式中,当具体执行动作为扫地时,动画显示扫地角色形象例如为携带着Q版扫把的Q版鲸灵交替朝向左侧执行扫地动作以及朝向右侧执行扫地动作;动画显示扫地文字标识例如为“机器人正在扫地”;动画显示扫地执行结构标识例如为边刷旋转。当然也不限于此,例如对前述扫地角色形象、扫地文字标识、扫地执行结构标识中的至少两项进行组合显示。In some embodiments, when the specific execution action is sweeping the floor, the animation displays a sweeping character image, such as a Q version whale spirit carrying a Q version broom, alternately performing sweeping actions toward the left and performing sweeping actions toward the right; the animation displays the sweeping text The logo is, for example, "the robot is sweeping the floor"; the logo of the animation display sweeping execution structure is, for example, side brush rotation. Of course, it is not limited to this. For example, at least two of the aforementioned sweeping character image, sweeping text mark, and sweeping execution structure mark may be displayed in combination.
在一些实施方式中,当具体执行动作为拖地时,动画显示拖地角色形象例如为携带着Q版拖布的Q版鲸灵交替朝向左侧执行拖地动作以及朝向右侧执行拖擦动作;动画显示拖地文字标识例如为“机器人正在拖地”;动画显示拖地执行结构标识例如为拖布旋转。当然也不限于此,例如对前述拖地角色形象、拖地文字标识、拖地执行结构标识中的至少两项进行组合显示。In some embodiments, when the specific execution action is mopping the floor, the animation displays the mopping character image, for example, a Q version whale spirit carrying a Q version mop, alternately performing the mopping action toward the left and performing the mopping action toward the right; The animated mopping text mark is, for example, "the robot is mopping the floor"; the mopping execution structure mark, for example, is mopping cloth rotation. Of course, it is not limited to this. For example, at least two of the aforementioned mopping character images, mopping text logos, and mopping execution structure logos may be displayed in combination.
在一些实施方式中,当具体执行动作为扫拖地同时进行时,动画显示扫拖地角色形象例如为携带着Q版拖布和Q版扫把的Q版鲸灵同时执行拖擦动作以及扫地动作;动画显示扫拖地文字标识例如为“机器人正在同时进行扫拖地”;动画显示扫拖地执行结构标识例如为边刷以及拖布同时旋转。当然也不限于此,例如对前述扫拖地角色形象、扫拖地文字标识、扫拖地执行结构标识中的至少两项进行组合显示。In some embodiments, when the specific execution action is sweeping and mopping the floor at the same time, the animation displays the sweeping and mopping character image, for example, the Q version whale spirit carrying the Q version mop and Q version broom to perform the mopping and sweeping actions at the same time; The animated sweeping and mopping text mark is, for example, "the robot is sweeping and mopping at the same time." The animated sweeping and mopping execution structure mark, for example, is that the side brush and the mop rotate simultaneously. Of course, it is not limited to this. For example, at least two of the aforementioned sweeping and mopping character images, sweeping and mopping text logos, and sweeping and mopping execution structure logos may be displayed in combination.
在一些实施方式中,当具体执行动作为清洁地毯时,动画显示清洁地毯角色形象例如为携带着Q版扫把的Q版鲸灵出现在地毯上执行扫地动作;动画显示清洁地毯文字标识例如为“机器人正在清洁地毯”;动画显示清洁地毯执行结构标识例如为至少一个边刷旋转,或 者,中扫运动,或者拖布逐渐消失中的至少一项。当然也不限于此,例如对前述清洁地毯角色形象、清洁地毯文字标识、清洁地毯执行结构标识中的至少两项进行组合显示。In some embodiments, when the specific execution action is carpet cleaning, the animation displays a carpet cleaning character image, such as a Q version whale spirit carrying a Q version broom, appearing on the carpet to perform the sweeping action; the animation displays the carpet cleaning text logo, for example, " "The robot is cleaning the carpet"; the animation shows that the cleaning carpet execution structure identifier is, for example, at least one of at least one side brush rotation, or a mid-sweeping motion, or the mop gradually disappearing. Of course, it is not limited to this. For example, at least two of the aforementioned cleaning carpet character image, cleaning carpet text logo, and cleaning carpet execution structure logo are displayed in combination.
依此类推,当清洁设备执行相应的执行事项时,动画都可以进行相应角色形象、文字标识、执行结构标识中的至少一项进行动态显示。By analogy, when the cleaning equipment performs corresponding execution items, the animation can dynamically display at least one of the corresponding character image, text logo, and execution structure logo.
可选地,角色形象、文字标识、执行结构标识中的至少一种旨在提示用户清洁设备的执行事项对应的执行动作。在一些实施方式中,具体执行动作对应的角色形象、文字标识、执行结构标识中的至少一种可以是预先设置的,也可以是后期拓展更新的,还可以是用户自行设置的,在此不做限定。Optionally, at least one of a character image, a text identifier, and an execution structure identifier is intended to prompt the user to perform an execution action corresponding to an execution item of the cleaning equipment. In some implementations, at least one of the character image, text identifier, and execution structure identifier corresponding to the specific execution action may be preset, may be expanded and updated later, or may be set by the user. This is not the case here. Make limitations.
示例性的,执行机构标识包括边刷标识、拖擦件标识、中扫标识中的至少一种。在一些实施方式中,当清洁设备的执行事项为执行具体执行动作时,动画显示具体执行动作对应的执行动作执行结构,包括:当具体执行动作为拖地时,动画显示拖地执行结构标识为拖擦件标识,以及,显示拖擦件标识旋转;当具体执行动作为扫地时,动画显示扫地执行结构标识为中扫标识、边刷标识中的至少一种,以及,显示中扫标识运动、边刷标识运动中的至少一种;当具体执行动作为扫拖地同时进行时,动画显示扫拖地执行结构标识为拖擦件标识、中扫标识、边刷标识中的至少一种,以及,显示拖擦件标识运动、中扫标识运动、至少一个边刷标识运动中的至少一种;当具体执行动作为清洁地毯时,动画显示清洁地毯执行结构标识为中扫标识、边刷标识、拖擦件标识中的至少一种,以及,显示中扫标识运动、至少一个边刷标识运动、拖擦件标识抬起中的至少一种。Exemplarily, the actuator identification includes at least one of a side brush identification, a drag part identification, and a middle sweep identification. In some embodiments, when the execution item of the cleaning equipment is to perform a specific execution action, the animation displays the execution action execution structure corresponding to the specific execution action, including: when the specific execution action is mopping the floor, the animation displays the mopping execution structure identifier as The mopping part logo, and the rotation of the mopping part logo are displayed; when the specific execution action is sweeping the floor, the animation shows that the sweeping execution structure logo is at least one of the middle sweep logo and the side brush logo, and the movement of the mid-sweep logo, At least one of the side brush identification movements; when the specific execution action is sweeping and mopping the floor at the same time, the animation display sweeping and mopping execution structure identification is at least one of the mopping part identification, the middle sweep identification, and the side brush identification, and , displaying at least one of the movement of the mopping element logo, the movement of the mid-sweep logo, and the movement of at least one side brush logo; when the specific execution action is to clean the carpet, the animation displays the logo of the execution structure of the carpet cleaning as the mid-sweep logo, the side brush logo, at least one of the mopping element logo, and at least one of the movement of the mid-display scanning logo, the movement of at least one side brush logo, and the lifting of the mopping element logo.
举例而言,当清洁设备的具体执行动作为拖地时,清洁设备的拖擦件接触地面后进行旋转以拖擦地面,则动画例如可以显示拖擦件标识下降至接触地面后旋转,并且拖擦件标识所在位置随着拖擦件标识的旋转从略显黯淡无光的灰色逐渐变得干净,以提示用户清洁设备的执行事项为拖地。For example, when the specific execution action of the cleaning equipment is to mop the floor, and the mopping member of the cleaning equipment contacts the ground and then rotates to mop the floor, the animation may show, for example, that the logo of the mopping member drops to contact the ground and then rotates and mops. The position of the mopping part logo gradually changes from a slightly dull gray to a cleaner position as the mopping part logo rotates, to remind the user that the execution of the cleaning equipment is to mop the floor.
举例而言,当清洁设备的具体执行动作为扫地时,清洁设备可以根据地面的材质选择中扫、边刷中的至少一种对地面进行清扫,则动画例如可以显示中扫标识接触地面后运动,并且中扫标识所在位置随着中扫标识的运动脏污逐渐消失;和/或,动画例如可以显示边刷标识在展开并接触地面后运动,并且边刷标识所在位置随着边刷标识的运动脏污逐渐消失,以提示用户清洁设备的执行事项为扫地。For example, when the specific execution action of the cleaning equipment is sweeping the floor, the cleaning equipment can select at least one of the middle sweep and the side brush to clean the floor according to the material of the ground. Then the animation can, for example, show the movement of the middle sweep logo after it touches the ground. , and the dirt at the position of the middle scan logo gradually disappears as the middle scan logo moves; and/or, the animation can, for example, show that the side brush logo moves after it unfolds and touches the ground, and the position of the side brush logo changes with the movement of the side brush logo. Movement dirt gradually disappears, prompting the user to clean the equipment and clean the floor.
举例而言,当清洁设备的具体执行动作为扫拖地同时进行时,由于中扫、边刷、拖擦件对应的清洁范围不同,为了防止边刷污染已拖地面,当清洁设备以弓形轨迹移动以同时进行扫拖地时,清洁设备可以控制至少一个边刷交替收展,则动画例如可以显示拖擦件标识下降至接触地面后运动,并且拖擦件标识所在位置随着拖擦件标识的运动从略显黯淡无光的灰色逐渐变得干净;和/或,动画例如可以显示中扫标识接触地面后运动,并且中扫标识所在位置随着中扫标识运动脏污逐渐消失;和/或,动画例如可以显示至少一个边刷标识交替展开并接触地面以及收起不接触地面,同时在展开并接触地面后运动,并且随着各个边刷标识所在位置随着对应的边刷标识的运动脏污逐渐消失,以提示用户清洁设备的执行事项为扫拖地同时进行,以及,在一些实施方式中,清洁设备在同时进行扫拖地时还可以控制边刷交替收展以避免边刷污染已拖地面。For example, when the specific execution action of the cleaning equipment is sweeping and mopping the floor at the same time, since the cleaning ranges corresponding to the middle sweep, side brush, and mopping parts are different, in order to prevent the side brush from contaminating the mopped floor, when the cleaning equipment moves in an arcuate trajectory When moving to sweep and mop the floor at the same time, the cleaning equipment can control at least one side brush to expand alternately, and the animation can, for example, show that the mopping piece mark moves after it drops to touch the ground, and the position of the mopping piece mark follows the mopping piece mark. The movement of the logo gradually changes from a dull gray to a clean one; and/or, the animation can, for example, show the movement of the mid-scan logo after it touches the ground, and the dirt at the location of the mid-scan logo gradually disappears as the mid-scan logo moves; and/ Or, for example, the animation may display at least one side brush logo alternately unfolding and contacting the ground and retracting without contacting the ground. At the same time, it moves after unfolding and contacting the ground, and the position of each side brush logo follows the movement of the corresponding side brush logo. The dirt gradually disappears to remind the user that the cleaning equipment is to be swept and mopped at the same time. In some embodiments, the cleaning equipment can also control the side brushes to expand alternately to avoid contamination of the side brushes when sweeping and mopping the floor at the same time. The floor has been mopped.
举例而言,当清洁设备的具体执行动作为清洁地毯时,清洁设备可以根据地毯的材质选择中扫、边刷中的至少一种对地毯进行清洁,同时,在一些实施方式中,需要尽可能减少拖擦件弄湿地毯的情形,则动画例如可以显示中扫标识下降至接触地毯后运动,并且中扫标识所在位置随着中扫标识运动脏污逐渐消失;和/或,至少一个边刷标识交替展开并接触地毯以及收起不接触地毯,同时在展开并接触地毯后运动,并且随着各个边刷标识所在位置随着对应的边刷标识的运动脏污逐渐消失;和/或,动画例如可以显示拖擦件标识抬起至距离地毯一定高度的位置,在拖擦件标识距离地毯一定高度后,动画例如还可以显示拖擦件标识与地毯之间存在一保护罩以防止拖擦件标识弄湿地毯,以提示用户清洁设备的执行事项为清 洁地毯,以及,在一些实施方式中,清洁设备在清洁地毯时还可以控制拖擦件抬起以尽可能减少拖擦件弄湿地毯。For example, when the specific execution action of the cleaning equipment is to clean the carpet, the cleaning equipment can select at least one of a middle sweep and a side brush according to the material of the carpet to clean the carpet. At the same time, in some embodiments, it is necessary to clean the carpet as much as possible. To reduce the situation where the mopping element wets the carpet, the animation can, for example, show that the middle sweep mark moves after it drops to contact the carpet, and the dirt at the position of the middle sweep mark gradually disappears as the middle sweep mark moves; and/or, at least one side brush The logo alternately unfolds and contacts the carpet and retracts without contacting the carpet. At the same time, it moves after unfolding and contacting the carpet, and as the position of each side brush logo is moved, the dirt gradually disappears with the movement of the corresponding side brush logo; and/or, animation For example, it can be shown that the mopping piece logo is raised to a certain height from the carpet. After the mopping piece logo is a certain height away from the carpet, the animation can also show that there is a protective cover between the mopping piece logo and the carpet to prevent the mopping piece. The wet carpet sign is used to remind the user that the cleaning device is to clean the carpet. In some embodiments, the cleaning device can also control the lifting of the mopping member when cleaning the carpet to minimize the mopping member from wetting the carpet.
依此类推,清洁设备的具体执行动作不同时,动画显示的内容不同。在一些实施方式中,清洁设备的执行事项对应的具体执行动作可以是预先设置的,也可以是后期拓展更新的,还可以是用户自行设置的,在此不做限制。By analogy, when the specific execution actions of the cleaning equipment are different, the content displayed by the animation is different. In some implementations, the specific execution actions corresponding to the execution items of the cleaning equipment may be preset, may be expanded and updated at a later stage, or may be set by the user themselves, which is not limited here.
示例性的,角色标识包括机体标识。在一些实施方式中,根据执行事项,确定角色标识对应的执行动作,其中,动画用于指示角色标识对应的执行动作,包括:当清洁设备的执行动作为移动时,动画显示机体标识移动。举例而言,请参阅图53(a)或图59,例如以清洁设备的顶视图作为清洁设备的机体标识,在清洁设备移动时,动画例如可以显示机体标识移动,并且随着机体标识的移动动态生成机体标识的移动轨迹。For example, the character identifier includes an organism identifier. In some embodiments, the execution action corresponding to the character identification is determined according to the execution item, wherein the animation is used to indicate the execution action corresponding to the character identification, including: when the execution action of the cleaning equipment is movement, the animation displays the movement of the body identification. For example, please refer to Figure 53(a) or Figure 59. For example, a top view of the cleaning equipment is used as the body identification of the cleaning equipment. When the cleaning equipment moves, the animation can, for example, show that the body identification moves, and as the body identification moves Dynamically generate the movement trajectory of the body logo.
请结合前述参阅图60,图60是本申请另一实施例提供的可视化界面的生成方法的流程示意图。Please refer to FIG. 60 in conjunction with the foregoing. FIG. 60 is a schematic flowchart of a method for generating a visual interface provided by another embodiment of the present application.
如图60所示,本申请另一实施例的可视化界面的生成方法包括步骤S210至步骤S230。As shown in Figure 60, the method for generating a visual interface according to another embodiment of the present application includes steps S210 to S230.
步骤S210、获取清洁设备的全部或部分已完成的执行事项。Step S210: Obtain all or part of the completed execution items of the cleaning equipment.
步骤S220、根据获取的清洁设备的全部或部分已完成的执行事项,生成可视化界面,可视化界面用于通过动画指示清洁设备的全部或部分已完成的执行事项。Step S220: Generate a visual interface based on the acquired execution items of all or part of the cleaning equipment, and the visual interface is used to indicate all or part of the completed execution items of the cleaning equipment through animation.
可以理解的,步骤S210、步骤S220的具体原理和实施方式可以参照前述步骤S110、步骤S120的具体原理和实施方式,在此不再赘述。It can be understood that the specific principles and implementation methods of step S210 and step S220 can refer to the specific principles and implementation methods of the aforementioned step S110 and step S120, and will not be described again here.
步骤S230、在可视化界面上显示第一执行事项的提示,第一执行事项为符合预设条件的执行事项。Step S230: Display a prompt of the first execution item on the visual interface, where the first execution item is an execution item that meets the preset conditions.
举例而言,预设条件,包括以下任意一项:清洁地毯、清洗拖擦件、重复清洁、沿边补漏、边刷交替收展、障碍物探索、执行任务中途充电、障碍物跨越、脱困、接收指令、特定区域清洁。当第一执行事项符合预设条件时,在可视化界面上显示第一执行事项的提示。当然也不限于此,例如,预设条件还可以是用户自定义设置的,以用户设置的相应的执行事项为第一执行事项。For example, the preset conditions include any of the following: cleaning carpets, cleaning mops, repeated cleaning, edge leak repair, alternate extension of edge brushes, obstacle exploration, charging during task execution, obstacle crossing, escape, and reception. Instructions, specific area cleaning. When the first execution item meets the preset conditions, a prompt for the first execution item is displayed on the visual interface. Of course, it is not limited to this. For example, the preset condition can also be customized by the user, and the corresponding execution item set by the user is the first execution item.
示例性的,在可视化界面上显示第一执行事项的提示的时刻不早于可视化界面通过动画指示第一执行事项的时刻。For example, the time when the prompt of the first execution item is displayed on the visual interface is not earlier than the time when the visual interface indicates the first execution item through animation.
举例而言,当清洁设备的执行事项为第一执行事项时,在可视化界面上显示执行第一执行事项的动画的同时显示第一执行事项的提示;或者,在可视化界面上显示执行第一执行事项的动画的过程中显示第一执行事项的提示,以突出强调清洁设备的执行事项为第一执行事项。For example, when the execution item of the cleaning equipment is the first execution item, the animation of executing the first execution item is displayed on the visual interface and a prompt of the first execution item is displayed at the same time; or, the prompt of executing the first execution item is displayed on the visual interface. A prompt for the first execution item is displayed during the animation of the item, so as to highlight the execution item of the cleaning equipment as the first execution item.
可选的,在可视化界面上显示第一执行事项的提示,包括:在可视化界面上显示弹窗;以及,在弹窗中显示第一执行事项对应的文案、图片、动画中的至少一种。Optionally, displaying a prompt for the first execution item on the visual interface includes: displaying a pop-up window on the visual interface; and displaying at least one of copywriting, pictures, and animation corresponding to the first execution item in the pop-up window.
举例而言,通过在弹窗中显示第一执行事项对应的文案、图片、动画中的至少一种,突出强调清洁设备的执行事项为第一执行事项。For example, by displaying at least one of copywriting, pictures, and animations corresponding to the first execution item in the pop-up window, the execution item of the cleaning equipment is highlighted as the first execution item.
在一些实施方式中,弹窗中显示第一执行事项对应的文案例如可以为执行事项对应的信息。示例性的,请参阅图61,当清洁设备的第一执行事项为清洗拖擦件时,弹窗中显示执行事项对应的文案例如包括“小鲸灵提着拖布回家清洗拖布啦!”,当然也不限于此;请参阅图62,当清洁设备的第一执行事项为接收指令时,弹窗中显示第一执行事项对应的文案例如可以包括第一执行事项对应的执行次数、第一执行事项对应的清洁耗时、第一执行事项对应的清洁面积中的至少一种,例如,弹窗中的文案例如包括“我出来努力工作啦!”,当然也不限于此,例如还可以包括“我准备扫100平,干两小时!”等等,以通过文案突出强调清洁设备的执行事项为第一执行事项。In some implementations, the copy corresponding to the first execution item displayed in the pop-up window may be, for example, information corresponding to the execution item. For example, please refer to Figure 61. When the first execution item of the cleaning equipment is to clean the mop, the copy corresponding to the execution item displayed in the pop-up window includes, for example, "Little Whale Spirit is carrying the mop home and cleaning the mop!" Of course, it is not limited to this; please refer to Figure 62. When the first execution item of the cleaning equipment is to receive an instruction, the copy corresponding to the first execution item displayed in the pop-up window may include, for example, the number of executions corresponding to the first execution item, the first execution At least one of the cleaning time corresponding to the item and the cleaning area corresponding to the first execution item. For example, the copy in the pop-up window includes, for example, "I'm out to work hard!". Of course, it is not limited to this. For example, it can also include " I’m going to sweep 100 square meters and do it for two hours!” etc., and highlight the implementation of cleaning equipment through copywriting as the first implementation item.
在一些实施方式中,弹窗中显示第一执行事项对应的图片例如可以包括清洁设备所处环境以及清洁设备的角色标识中的至少一种的图片,例如,请参阅图63,当清洁设备的第 一执行事项为清洗拖擦件时,弹窗中显示的图片例如可以包括携带着Q版拖布的Q版鲸灵位于基站附近,当然也不限于此,以通过图片突出强调清洁设备的执行事项为第一执行事项。In some embodiments, the picture corresponding to the first execution item displayed in the pop-up window may include, for example, a picture of at least one of the environment in which the cleaning equipment is located and the role identification of the cleaning equipment. For example, please refer to Figure 63. When the cleaning equipment When the first execution item is cleaning and mopping parts, the picture displayed in the pop-up window may include, for example, a Q-version whale spirit carrying a Q-version mop near the base station. Of course, it is not limited to this, so as to highlight the execution items of the cleaning equipment through the picture. as the first execution matter.
示例性的,在弹窗中显示第一执行事项对应的动画例如可以包括预设的第一执行事项动画、可视化界面上显示的该第一执行事项对应的动画中的任意一种。在一些实施方式中,通过在弹窗中显示预设的第一执行事项动画,例如,请参阅图61至图62,当第一执行事项为清洗拖擦件并移动时,预设的第一执行事项动画例如可以显示Q版鲸灵向基站移动并在基站中清洗拖擦件的内容,当然也不限于此;在一些实施方式中,通过在弹窗中显示可视化界面上该第一执行事项对应的动画,例如,该第一执行事项对应的动画在可视化界面上的某一位置或某一局部中显示,则弹窗例如可以放大显示该可视化界面上的某一位置或某一局部显示的该第一执行事项对应的动画,例如对可视化界面上的某一位置或某一局部显示的该第一执行事项对应的清洁设备的移动轨迹和/或执行事项对应的动画进行放大显示,以通过动画突出强调清洁设备的执行事项为第一执行事项。For example, displaying the animation corresponding to the first execution item in the pop-up window may include any one of a preset first execution item animation and an animation corresponding to the first execution item displayed on the visual interface. In some embodiments, by displaying the preset first execution item animation in the pop-up window, for example, please refer to FIG. 61 to FIG. 62 , when the first execution item is cleaning the mop piece and moving it, the preset first execution item animation is displayed in the pop-up window. For example, the execution item animation can display the content of the Q version of Whale Spirit moving to the base station and cleaning the drag items in the base station, but of course it is not limited to this; in some embodiments, by displaying the first execution item on the visual interface in a pop-up window The corresponding animation, for example, the animation corresponding to the first execution item is displayed in a certain position or a certain part of the visual interface, and the pop-up window can, for example, enlarge the display of a certain position or a certain part of the visual interface. The animation corresponding to the first execution item is, for example, an enlarged display of the movement trajectory of the cleaning equipment corresponding to the first execution item and/or the animation corresponding to the execution item displayed at a certain position or a certain part of the visual interface, so as to pass The animation highlights the execution of cleaning equipment as the first execution item.
在一些实施方式中,在可视化界面中显示弹窗,包括:弹窗的背景透明度处于预设透明度范围内,以使弹窗不完全遮挡可视化界面中的动画或者突出弹窗。In some implementations, displaying the pop-up window in the visual interface includes: the background transparency of the pop-up window is within a preset transparency range, so that the pop-up window does not completely block the animation in the visual interface or highlight the pop-up window.
举例而言,在弹窗中显示预设的第一执行事项动画时,例如设置弹窗的背景透明度为预设透明度范围中的较高值,以使弹窗不完全遮挡可视化界面,从而既可以突出强调清洁设备的执行事项为第一执行事项,又可以让用户看到清洁设备在未遮挡部分的可视化界面中的动画。举例而言,在弹窗中显示可视化界面上显示的该第一执行事项对应的动画时,例如在弹窗中放大显示该可视化界面上的某一位置或某一局部显示的该第一执行事项对应的动画,则可以设置弹窗的背景透明度为预设透明度范围内中的较低值,以使突出弹窗,从而突出强调清洁设备的执行事项为第一执行事项。For example, when displaying the preset first execution item animation in a pop-up window, for example, setting the background transparency of the pop-up window to a higher value in the preset transparency range so that the pop-up window does not completely block the visual interface, so that both The execution items of the cleaning equipment are highlighted as the first execution items, and the user can see the animation of the cleaning equipment in the unobstructed part of the visual interface. For example, when the animation corresponding to the first execution item displayed on the visual interface is displayed in the pop-up window, for example, the first execution item displayed at a certain position or a certain part of the visual interface is enlarged in the pop-up window. For the corresponding animation, the background transparency of the pop-up window can be set to a lower value within the preset transparency range to highlight the pop-up window and thereby highlight the execution items of the cleaning equipment as the first execution item.
在一些实施方式中,清洁设备的清洁过程例如为清洁设备清洁用户指定的一个房间的过程。举例而言,清洁设备在清洁用户指定房间的过程中的执行事项包括扫地并移动、拖地并移动、以及清洗拖擦件。可选地,可视化界面上例如根据清洁设备的执行事项的先后顺序显示动画,示例性的,首先动画显示携带着Q版扫把的Q版鲸灵交替朝向左侧执行扫地动作以及朝向右侧执行扫地动作同时移动,并且跟随着携带着Q版扫把的Q版鲸灵的移动动态生成扫地并移动对应的移动轨迹,其中,扫地并移动对应的移动轨迹例如可以覆盖整个房间;然后动画显示携带着Q版拖布的Q版鲸灵交替朝向左侧执行拖地动作以及朝向右侧执行拖地动作同时移动,并且跟随着携带着Q版拖布的Q版鲸灵的移动动态生成拖地并移动对应的移动轨迹;接着动画显示当携带着Q版拖布的Q版鲸灵交替朝向左侧执行拖地动作以及朝向右侧执行拖地动作同时移动至某一位置时,Q版鲸灵停留在该位置上对Q版拖布进行揉搓清洗,示例性的,当携带着Q版拖布的Q版鲸灵移动至某一位置时,可视化界面上例如弹出一弹窗,其中,在弹窗中例如放大显示携带着Q版拖布的Q版鲸灵对Q版拖布进行揉搓清洗,依此类推,以直观显示清洁设备的清洁过程。In some embodiments, the cleaning process of the cleaning device is, for example, a process in which the cleaning device cleans a room designated by the user. For example, the tasks performed by the cleaning equipment in cleaning the room designated by the user include sweeping and moving, mopping and moving, and cleaning the mop parts. Optionally, the animation is displayed on the visual interface according to the order of execution of the cleaning equipment. For example, the animation first displays the Q version of the whale spirit carrying the Q version of the broom alternately performing sweeping actions towards the left and sweeping towards the right. The movements move at the same time, and follow the movement of the Q version of the whale spirit carrying the Q version of the broom to dynamically generate a corresponding movement trajectory for sweeping and moving. Among them, the corresponding movement trajectory for sweeping and moving can cover the entire room, for example; then the animation displays the Q version carrying the Q version of the whale spirit. The Q-version whale spirit of the mop alternately performs mopping actions toward the left and mops toward the right and moves simultaneously, and follows the movement of the Q-version whale spirit carrying the Q-version mop to dynamically generate mopping and move corresponding movements. trajectory; then the animation shows that when the Q version of the whale spirit carrying the Q version of the mop alternately performs mopping actions towards the left and right, while moving to a certain position, the Q version of the whale spirit stays at that position to mop the floor. The Q-version mop is rubbed and cleaned. For example, when the Q-version whale spirit carrying the Q-version mop moves to a certain position, a pop-up window pops up on the visual interface. In the pop-up window, for example, the Q-version mop is enlarged and displayed. The Q-version Whale Spirit of the mop rubs and cleans the Q-version mop, and so on, to visually display the cleaning process of the cleaning equipment.
当然也不限于此,可选地,可视化界面上例如同时显示多个执行事项的动画,示例性的,动画同时显示有携带着Q版扫把的Q版鲸灵以及携带着Q版拖布的Q版鲸灵,其中,携带着Q版扫把的Q版鲸灵在前面交替朝向左侧执行扫地动作以及朝向右侧执行扫地动作,携带着Q版拖布的Q版鲸灵在后面跟随着交替朝向左侧执行拖地动作以及朝向右侧执行拖地动作,当携带着Q版拖布的Q版鲸灵移动至某一位置时,携带着Q版拖布的Q版鲸灵停留在该位置上对Q版拖布进行揉搓清洗,示例性的,当携带着Q版拖布的Q版鲸灵移动至某一位置时,可视化界面上例如弹出一弹窗,其中,在弹窗中例如放大显示Q版鲸灵对Q版拖布进行揉搓清洗,从而通过可视化界面上的动画、弹窗中的至少一种直观地向用户展示清洁设备在清洁过程中涉及的移动轨迹和执行事项。依此类推,可视化界面上例如还可以根据清洁设备当前已执行的全部或部分执行事项显示动画,并随着清洁设备的执行事项增加动态更新动画,在此不做限制。Of course, it is not limited to this. Optionally, the visual interface displays animations of multiple execution items at the same time. For example, the animation simultaneously displays the Q version of the whale spirit carrying the Q version of the broom and the Q version of the mop. Among them, the Q-version whale spirit carrying the Q-version broom alternately performs sweeping actions toward the left and the right, and the Q-version whale spirit carrying the Q-version mop follows behind and alternately moves toward the left. Perform the mopping action and perform the mopping action towards the right side. When the Q version whale spirit carrying the Q version mop moves to a certain position, the Q version whale spirit carrying the Q version mop stays at that position and mops the Q version mop. Carry out rubbing and cleaning. For example, when the Q version of the whale spirit carrying the Q version of the mop moves to a certain position, a pop-up window will pop up on the visual interface. In the pop-up window, for example, the Q version of the whale spirit will be enlarged to display the Q version. The mop is rubbed and cleaned, thereby intuitively showing the user the movement trajectory and execution matters involved in the cleaning process of the cleaning equipment through at least one of animations and pop-up windows on the visual interface. By analogy, the visual interface can also display animations based on all or part of the execution items currently executed by the cleaning equipment, and dynamically update the animation as the execution items of the cleaning equipment increase, which is not limited here.
可选的,该生成方法还包括:获取可视化界面中的动画的时长;当可视化界面中的动画的时长大于预设动画时长阈值时,对可视化界面中的动画的时长进行压缩处理。Optionally, the generation method also includes: obtaining the duration of the animation in the visual interface; when the duration of the animation in the visual interface is greater than the preset animation duration threshold, compressing the duration of the animation in the visual interface.
举例而言,当清洁设备完成清洁任务的清洁耗时较长时,若直接根据该耗时时长确定可视化界面中的动画的时长,容易导致动画的时长较长,用户观看完毕该可视化界面中的动画需要花费较长时间,从而不利于用户时间的高效利用,以及用户对清洁设备的使用体验。示例性的,需要对可视化界面中的动画的时长进行相应的控制,例如,当可视化界面中的动画的时长大于预设动画时长阈值时,对可视化界面中的动画的时长进行压缩处理。示例性地,对动画的时长进行压缩处理可以指对动画的播放速度进行加快。在一些实施方式中,还可以根据预设动画时长阈值,对可视化界面中的动画的时长以及弹窗的时长进行相应的控制,以提高用户观看可视化界面中的动画的兴趣,从而有利于实现清洁设备的清洁过程的可视化,以及,提高用户对清洁设备的使用体验。For example, when the cleaning equipment takes a long time to complete the cleaning task, if the duration of the animation in the visual interface is determined directly based on the time, it will easily lead to a longer duration of the animation, and the user will not finish watching the animation in the visual interface. The animation takes a long time, which is not conducive to the efficient use of the user's time and the user's experience of using the cleaning equipment. For example, the duration of the animation in the visual interface needs to be controlled accordingly. For example, when the duration of the animation in the visual interface is greater than the preset animation duration threshold, the duration of the animation in the visual interface is compressed. For example, compressing the duration of the animation may mean speeding up the playback speed of the animation. In some embodiments, the duration of the animation in the visual interface and the duration of the pop-up window can also be controlled accordingly according to the preset animation duration threshold, so as to increase the user's interest in watching the animation in the visual interface, thereby facilitating cleaning. Visualize the cleaning process of the equipment and improve the user's experience of using the cleaning equipment.
在一些实施方式中,可视化界面还包括分享标识和/或保存标识。其中,分享标识用于指示用户进行可视化界面的分享,保存标识用于指示用户进行可视化界面的保存。In some embodiments, the visual interface also includes sharing the identification and/or saving the identification. Among them, the sharing logo is used to instruct the user to share the visual interface, and the save logo is used to instruct the user to save the visual interface.
举例而言,如图64所示,用户在观看该可视化界面中的动画或者观看完毕该可视化界面中的动画时,若想对该可视化界面中的动画进行分享和/或保存,则可以根据分享标识和/或保存标识的指示进行相应操作。示例性的,保存标识例如为下载标识,可视化界面中的动画例如以视频的形式进行分享或保存,以便捷地满足用户对可视化界面的分享需求和/或保存需求,从而提高用户对清洁设备的使用体验。For example, as shown in Figure 64, when the user is watching the animation in the visual interface or has finished watching the animation in the visual interface, if he wants to share and/or save the animation in the visual interface, he can share according to Follow the instructions for identifying and/or saving the identification accordingly. For example, the save logo is, for example, a download logo, and the animation in the visual interface is shared or saved, for example, in the form of a video, so as to conveniently meet the user's sharing and/or saving needs for the visual interface, thereby improving the user's awareness of the cleaning equipment. Use experience.
请结合上述实施例参阅图65,图65为本申请实施例提供的一种可视化界面的生成装置200的示意性框图。该生成装置200包括处理器201和存储器202。Please refer to FIG. 65 in conjunction with the above embodiment. FIG. 65 is a schematic block diagram of a visual
示例性的,处理器201和存储器202通过总线203连接,该总线203比如为I2C(Inter-integrated Circuit)总线。For example, the processor 201 and the
具体地,处理器201可以是微控制单元(Micro-controller Unit,MCU)、中央处理单元(Central Processing Unit,CPU)或数字信号处理器(Digital Signal Processor,DSP)等。Specifically, the processor 201 may be a micro-controller unit (Micro-controller Unit, MCU), a central processing unit (Central Processing Unit, CPU) or a digital signal processor (Digital Signal Processor, DSP), etc.
具体地,存储器202可以是Flash芯片、只读存储器(ROM,Read-Only Memory)磁盘、光盘、U盘或移动硬盘等。Specifically, the
其中,所述处理器201用于运行存储在存储器202中的计算机程序,并在执行所述计算机程序时实现前述的可视化界面的生成方法的步骤。The processor 201 is configured to run a computer program stored in the
示例性的,所述处理器201用于运行存储在存储器202中的计算机程序,并在执行所述计算机程序时实现如下步骤:Exemplarily, the processor 201 is used to run a computer program stored in the
获取清洁设备的全部或部分已完成的执行事项;Obtain all or part of the completed execution items for cleaning equipment;
根据所述获取的清洁设备的全部或部分已完成的执行事项,生成可视化界面,所述可视化界面用于通过动画指示所述清洁设备的全部或部分已完成的执行事项。A visual interface is generated based on the acquired execution items of all or part of the cleaning equipment, and the visual interface is used to indicate all or part of the execution items of the cleaning equipment through animation.
本申请实施例提供的生成装置200的具体原理和实现方式均与前述实施例的方法类似,在此不再赘述。The specific principles and implementation methods of the
请参阅图66,图66是本申请实施例提供的一种清洁设备系统。Please refer to Figure 66. Figure 66 is a cleaning equipment system provided by an embodiment of the present application.
如图66所示,清洁设备系统包括:As shown in Figure 66, the cleaning equipment system includes:
清洁设备100,所述清洁设备100包括运动机构和执行机构,所述运动机构用于驱动所述清洁设备100运动,以使所述执行机构进行清洁;
生成装置200。
示例性的,生成装置200,可以用于实现本申请实施例的可视化界面的生成方法的步骤。Exemplarily, the
在一些实施方式中,清洁设备包括清洁机器人、手持清洁设备、其他清洁设备中的至少一种。In some embodiments, the cleaning equipment includes at least one of a cleaning robot, a handheld cleaning equipment, and other cleaning equipment.
可选地,清洁设备100例如可以自行对执行清洁任务的执行机构进行清洁。Alternatively, the
可选地,清洁设备100例如不可以自行对执行清洁任务的执行机构进行清洁。在一些实施方式中,清洁设备系统还包括一个或多个基站。基站用于和清洁设备100配合使用,以至少用于对清洁设备的执行机构进行清洁。Optionally, the
可选地,清洁设备系统包括单独的生成装置200,用于实现本申请实施例的可视化界面的方法的步骤,该生成装置200可以设置在清洁设备100上,或者可以设置在基站上;当然也不限于此,例如生成装置200可以为除清洁设备100和基站之外的装置,如家庭智能终端、总控设备等;在另一些实施方式中,清洁设备100中例如设置有设备控制器,基站中例如设置有基站控制器,设备控制器和/或基站控制器可以单独或者配合作为生成装置200,用于实现本申请实施例的可视化界面的生成方法的步骤。Optionally, the cleaning equipment system includes a
本申请实施例提供的清洁设备系统的具体原理和实现方式均与前述实施例的可视化界面的生成方法类似,此处不再赘述。The specific principles and implementation methods of the cleaning equipment system provided by the embodiments of the present application are similar to the method of generating the visual interface in the previous embodiments, and will not be described again here.
本申请实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时使所述处理器实现上述方法的步骤。Embodiments of the present application also provide a computer-readable storage medium. The computer-readable storage medium stores a computer program. When the computer program is executed by a processor, the processor can implement the steps of the above method.
其中,所述计算机可读存储介质可以是前述任一实施例所述的生成装置的内部存储单元,例如所述生成装置的硬盘或内存。所述计算机可读存储介质也可以是所述生成装置的外部存储设备,例如所述生成装置上配备的插接式硬盘,智能存储卡(Smart Media Card,SMC),安全数字(Secure Digital,SD)卡,闪存卡(Flash Card)等。The computer-readable storage medium may be an internal storage unit of the generation device described in any of the preceding embodiments, such as a hard disk or memory of the generation device. The computer-readable storage medium may also be an external storage device of the generating device, such as a plug-in hard disk, a smart memory card (Smart Media Card, SMC), or a secure digital (SD) equipped on the generating device. ) card, Flash Card, etc.
清洁机器人可用于对地面进行自动清洁,应用场景可以为家庭室内清洁、大型场所清洁等。清洁机器人可以通过清洁件对地面进行清洁,清洁机器人在清洁地面一段时间后往往会发生电量不足或清洁件变得脏污等情况,需要返回基站进行维护,如对清洁机器人进行充电,或者对清洁件进行清洁;通常通过限定清洁机器人在完成一房间的清洁后返回基站,但是这样并不能让各房间均能得到较好的清洁,而且在一些情况下还会影响清洁机器人的清洁效率,例如有些场景中某个房间的面积比较大时,清洁件的清洁能力无法满足该区域的清洁,比如清洁件已经很脏了还继续对地面进行清洁,清洁效果不好,或者清洁机器人的电量无法满足该区域的清洁,导致清洁机器人在未完成该区域清洁的时候就得回基站进行充电,在长时间充电之后才能返回该区域继续清洁,清洁效率也受到了影响;而有些区域划分方式使得各个区域面积过小,每完成一个区域就需要返回基站维护,使得清洁机器人返回基站维护的频率较高,清洁效率较低。Cleaning robots can be used to automatically clean floors, and their application scenarios can include household indoor cleaning, large-scale place cleaning, etc. The cleaning robot can clean the floor through cleaning parts. After cleaning the floor for a period of time, the cleaning robot often runs out of power or the cleaning parts become dirty. It needs to return to the base station for maintenance, such as charging the cleaning robot or cleaning the floor. Parts are cleaned; usually the cleaning robot is limited to return to the base station after completing the cleaning of one room. However, this does not allow each room to be cleaned well, and in some cases it will also affect the cleaning efficiency of the cleaning robot. For example, some When the area of a certain room in the scene is relatively large, the cleaning ability of the cleaning parts cannot meet the needs of cleaning the area. For example, if the cleaning parts are already very dirty and they continue to clean the floor, the cleaning effect is not good, or the power of the cleaning robot cannot meet the requirements. The cleaning of the area causes the cleaning robot to return to the base station for charging before completing the cleaning of the area. It takes a long time to charge before returning to the area to continue cleaning. The cleaning efficiency is also affected; and some area division methods make the area of each area If it is too small, it will need to return to the base station for maintenance every time it completes an area, making the cleaning robot return to the base station for maintenance more frequently and lowering the cleaning efficiency.
请参阅图67,图67是本申请实施例提供的一种清洁机器人的清洁区域划分方法的流程示意图。所述清洁机器人的清洁区域划分方法可以应用在清洁系统中,用于对待清洁区域的房间进行划分得到预设清洁区域等过程。Please refer to FIG. 67 , which is a schematic flowchart of a cleaning area dividing method for a cleaning robot provided by an embodiment of the present application. The cleaning area dividing method of the cleaning robot can be applied in a cleaning system for processes such as dividing a room in a to-be-cleaned area to obtain a preset cleaning area.
待清洁区域可以为家庭空间、家庭空间的一个房间单元、一个房间单元的部分区域、大型场所或者大型场所的部分区域等任一个待清洁的区域。The area to be cleaned can be any area to be cleaned such as a family space, a room unit of a family space, a part of a room unit, a large place or a part of a large place.
本申请实施例还提供了一种清洁系统。如图2所示,清洁系统包括一个或多个清洁机器人100,以及一个或多个基站200。基站200用于和清洁机器人100配合使用,至少用于对清洁机器人进行维护;例如,基站200可以向清洁机器人100进行充电、基站200可以向清洁机器人100提供停靠位置等。基站200还可以对清洁机器人100的清洁件的进行清洁,其中,清洁件可以包括刷扫件,如边刷、中刷,刷扫件用于对地面进行刷扫以清除地面的垃圾或灰尘,清洁件还可以包括拖擦件,拖擦件用于对地面进行拖擦以清洁地面的污渍。An embodiment of the present application also provides a cleaning system. As shown in FIG. 2 , the cleaning system includes one or
清洁系统还包括控制装置300,控制装置300可以用于实现本申请实施例的清洁机器人的清洁区域划分方法的步骤,和/或清洁机器人的控制方法的步骤。可选地,清洁机器人100的机器人控制器和/或基站200的基站控制器可以单独或者配合作为控制装置300,用于实现本申请实施例的方法的步骤。在另一些实施方式中,清洁系统包括单独的控制装置300,用于实现本申请实施例的方法的步骤,该控制装置300可以设置在清洁机器人100上,或者可以设置在基站200上;当然也不限于此,例如控制装置300可以为除清洁机器人100和基 站200之外的装置,如家庭智能终端、总控设备等。The cleaning system also includes a
清洁机器人100可用于对地面进行自动清洁,清洁机器人100的应用场景可以为家庭室内清洁、大型场所清洁等。The cleaning
如图67所示,本申请实施例的清洁机器人的清洁区域划分方法包括步骤S110至步骤S130。As shown in Figure 67, the cleaning area dividing method of the cleaning robot according to the embodiment of the present application includes steps S110 to S130.
S110、获取房间的图形学特征,所述图形学特征包括所述房间的边界。S110. Obtain the graphic features of the room, where the graphic features include the boundaries of the room.
举例而言,如图70所示,清洁任务地图中包括房间1、房间2和房间3;在步骤S110获取的房间的图形学特征时可以获取一个或多个房间的图形学特征。For example, as shown in FIG. 70 , the cleaning task map includes
需要说明的是,房间包含由清洁机器人进行扫描后分出的房间,也包括用户编辑(如进行拆分、合并)的房间。房间可以理解为在清洁任务地图上由墙壁、台阶、障碍物(如箱式床)等有形的边界定义的区域,还可以包括由用户定义的房间,用户定义的房间例如为墙壁围合成的区域中的部分区域,如客厅中的开放式厨房、餐厅等,或者用户定义的房间还可以为多个有形的边界定义的区域合并得到的房间,如客厅和阳台可以作为一个房间。It should be noted that the rooms include rooms separated by scanning by the cleaning robot, and also include rooms edited by users (such as splitting and merging). A room can be understood as an area defined by tangible boundaries such as walls, steps, and obstacles (such as box beds) on the cleaning task map. It can also include rooms defined by users. User-defined rooms are, for example, areas enclosed by walls. Part of the area, such as the open kitchen, dining room, etc. in the living room, or a user-defined room can also be a room obtained by merging multiple areas defined by tangible boundaries, such as the living room and balcony can be used as one room.
示例性的,在清洁机器人建图时,清洁机器人可以通过雷达、视觉传感器、距离传感器等获取房间的边界以确定房间的图形学特征,或者在清洁机器人对待清洁区域进行沿边清洁时,根据沿边清洁的清洁轨迹确定房间的边界,根据房间的边界确定房间的图形学特征。For example, when the cleaning robot is mapping, the cleaning robot can obtain the boundaries of the room through radar, vision sensors, distance sensors, etc. to determine the graphic characteristics of the room, or when the cleaning robot performs edge cleaning of the area to be cleaned, based on edge cleaning The cleaning trajectory determines the boundary of the room, and the graphic characteristics of the room are determined based on the boundary of the room.
示例性的,在清洁机器人对待清洁区域进行探测后得到初始的清洁任务地图,可以根据用户对初始的清洁任务地图的编辑操作,如合并房间或拆分房间,得到编辑后的清洁任务地图。For example, the initial cleaning task map is obtained after the cleaning robot detects the area to be cleaned. The edited cleaning task map can be obtained according to the user's editing operation on the initial cleaning task map, such as merging rooms or splitting rooms.
S120、获取工作量值域范围。S120. Obtain the workload value range.
其中,所述工作量值域范围包括上限值和下限值,且所述上限值大于所述下限值。Wherein, the workload value range includes an upper limit value and a lower limit value, and the upper limit value is greater than the lower limit value.
清洁机器人的拖擦件能够吸附的脏污量是有限的,当拖擦件吸附较多的脏污时对地面的清洁效果较差,如果不返回基站对拖擦件进行维护,如清洁拖擦件或更换拖擦件,会导致地面不能拖擦干净;清洁机器人的电量也是有限的,在对地面清洁时若电量不足,不能保证返回基站进行充电;清洁机器人的拖擦件上的水量、清洁机器人上用于给拖擦件供水的水箱的水量也是有限的,当水量不足时,对地面的清洁效果也较差;清洁机器人上用于收集脏污的集尘盒能够容纳的脏污量也是有限的,当容纳的脏污量较多时对地面的清洁效果也较差。The amount of dirt that the cleaning robot's mopping parts can absorb is limited. When the mopping parts absorb more dirt, the cleaning effect on the ground is poor. If the mopping parts are not returned to the base station for maintenance, such as cleaning and mopping If the mopping parts are replaced or the mopping parts are replaced, the ground cannot be mopped clean; the power of the cleaning robot is also limited. If the power is insufficient when cleaning the floor, it cannot be guaranteed to return to the base station for charging; The amount of water in the water tank used to supply water to the mopping parts on the robot is also limited. When the amount of water is insufficient, the cleaning effect on the ground is also poor; the amount of dirt that the dust box on the cleaning robot can hold is also limited. Limited, when the amount of dirt contained is large, the cleaning effect on the floor is also poor.
举例而言,为了保证拖擦件具有清洁能力,需要在任务进行的中间插入拖擦件维护任务,使得清洁机器人导航回基站,清洗或更换拖擦件后,继续执行对待清洁区域的清洁任务。通过设定工作量值域范围的上限值,可以控制清洁机器人在工作量达到工作量值域范围的上限值之前,及时返回基站进行维护,从而提高对地面的清洁效果。可选地,拖擦件的维护也可以不返回基站而由清洁机器人完成,例如清洁机器人自带水箱,可以直接对拖擦件进行清洗,或者清洁机器人自带拖擦件更换装置,可以直接对拖擦件进行更换。For example, in order to ensure that the mopping part has the cleaning ability, it is necessary to insert the mopping part maintenance task in the middle of the task, so that the cleaning robot navigates back to the base station, cleans or replaces the mopping part, and then continues to perform the cleaning task of the area to be cleaned. By setting the upper limit of the workload value range, the cleaning robot can be controlled to return to the base station for maintenance in time before the workload reaches the upper limit of the workload value range, thereby improving the cleaning effect on the ground. Optionally, the maintenance of the mopping parts can also be completed by the cleaning robot without returning to the base station. For example, the cleaning robot has its own water tank and can directly clean the mopping parts, or the cleaning robot has its own mopping part replacement device and can directly clean the mopping parts. Replace the wiper parts.
维护拖擦件需要消耗一定的时间,而且清洁机器人返回基站进行维护和继续执行清洁任务这个过程中的折返也会消耗较长时间,影响清洁机器人的清洁效率。当清洁机器人返回基站进行维护的频率较高时,例如当清洁机器人每次仅对很小面积(如2平方米)的地面进行拖擦后即返回基站进行维护,则会降低清洁机器人的清洁效率,也无法充分利用清洁机器人的清洁能力。通过设定工作量阈值范围的下限值,可以降低清洁机器人维护的频率,充分利用清洁机器人的性能,保证清洁机器人的清洁效率。It takes a certain amount of time to maintain the mopping parts, and the return of the cleaning robot to the base station for maintenance and continued cleaning tasks will also take a long time, affecting the cleaning efficiency of the cleaning robot. When the cleaning robot returns to the base station for maintenance frequently, for example, when the cleaning robot only mops a small area (such as 2 square meters) of the ground and then returns to the base station for maintenance, the cleaning efficiency of the cleaning robot will be reduced. , and cannot fully utilize the cleaning capabilities of the cleaning robot. By setting the lower limit of the workload threshold range, the frequency of maintenance of the cleaning robot can be reduced, the performance of the cleaning robot can be fully utilized, and the cleaning efficiency of the cleaning robot can be ensured.
可选的,工作量值域范围至少有两个,所述获取工作量值域范围包括:根据用户的选取操作,在至少两个工作量值域范围中确定用于划分所述预设清洁区域的工作量值域范围。举例而言,工作量包括清洁地面的面积时,预设的至少两个工作量值域范围包括5-7、10-12、14-16,单位为平方米;用户可以根据房间的图形学特征和/或用户清洁习惯在至少两个工作量值域范围中确定用于划分所述预设清洁区域的工作量值域范围。例如当房间的面积比较大时,可以选择上限值和/或下限值比较大的工作量值域范围,如14-16;例如当用户希望清 洁机器人维护频率高些或者清洁的更干净时,可以选择上限值和/或下限值比较小的工作量值域范围,如5-7。Optionally, there are at least two workload value domain ranges. The obtaining the workload value domain range includes: determining the preset cleaning area in at least two workload value domain ranges according to the user's selection operation. workload value range. For example, when the workload includes the area of the floor to be cleaned, the preset at least two workload value ranges include 5-7, 10-12, and 14-16, in square meters; the user can adjust the workload according to the graphical characteristics of the room. And/or the user's cleaning habits determine the workload value range for dividing the preset cleaning area in at least two workload value ranges. For example, when the room is relatively large, you can choose a workload value range with a relatively large upper limit and/or lower limit, such as 14-16; for example, when the user wants the cleaning robot to be maintained more frequently or to clean cleaner. , you can choose a workload value range with a smaller upper limit and/or lower limit, such as 5-7.
可选的,控制装置可以自行根据所述房间的图形学特征和/或用户清洁习惯,在预设的至少两个工作量值域范围中确定用于划分所述预设清洁区域的工作量值域范围。Optionally, the control device can determine the workload value for dividing the preset cleaning area within at least two preset workload value ranges based on the graphical characteristics of the room and/or the user's cleaning habits. domain scope.
S130、根据所述工作量值域范围和所述图形学特征,确定所述房间的分割线,以使所述分割线和所述房间的边界形成至少两个预设清洁区域,各所述预设清洁区域的工作量的量值均小于或等于所述工作量值域范围的上限值,且大于或等于所述工作量值域范围中的下限值;或者仅有一个所述预设清洁区域的工作量的量值小于所述下限值,且工作量的量值小于所述下限值的所述预设清洁区域的清洁顺序在其他所述预设清洁区域之后。S130. Determine the dividing line of the room according to the workload value range and the graphical characteristics, so that the dividing line and the boundary of the room form at least two preset cleaning areas, each of which is preset. It is assumed that the magnitude of the workload in the cleaning area is less than or equal to the upper limit of the workload value range, and greater than or equal to the lower limit of the workload value range; or there is only one preset value The magnitude of the workload of the cleaning area is less than the lower limit, and the cleaning sequence of the preset cleaning area whose magnitude of the workload is less than the lower limit is after the other preset cleaning areas.
示例性的,各所述预设清洁区域的工作量的量值均小于或等于所述工作量值域范围的上限值,以便所述清洁机器人在每完成一个所述预设清洁区域的工作量之后中断当前清洁任务以及运动到基站进行维护。Exemplarily, the magnitude of the workload of each of the preset cleaning areas is less than or equal to the upper limit of the workload value range, so that the cleaning robot completes the work of each of the preset cleaning areas. After the measurement, the current cleaning task is interrupted and the movement is carried out to the base station for maintenance.
其中,所述当前清洁任务包括对一个预设清洁区域进行的清洁任务,或者包括对一个房间的地面的清洁任务,或者还可以包括全屋所有房间的地面的清洁任务,或者还可以包括对清洁任务地图所指示的房间进行的清洁任务。Wherein, the current cleaning task includes a cleaning task for a preset cleaning area, or a cleaning task for the floor of a room, or it may also include a cleaning task for the floors of all rooms in the whole house, or it may also include a cleaning task for Cleaning tasks are performed in the rooms indicated on the task map.
示例性的,所述清洁任务包括通过拖擦件对地面进行拖擦、通过刷扫件对地面或地面上的地毯进行刷扫,还可以包括对地面同时进行拖擦和刷扫。For example, the cleaning task includes mopping the floor with a mopping member, brushing the floor or a carpet on the floor with a brushing member, and may also include mopping and brushing the floor at the same time.
在一些实施方式中,所述工作量包括以下至少一种:所述清洁机器人的拖擦件拖擦地面时吸附的脏污量、所述清洁机器人清洁地面时的耗电量、所述清洁机器人清洁地面时的耗水量、所述清洁机器人清洁地面时的脏污收集量、所述清洁机器人清洁地面的面积、所述清洁机器人清洁地面的路径长度。In some embodiments, the workload includes at least one of the following: the amount of dirt absorbed by the cleaning robot's mopping part when mopping the floor, the power consumption of the cleaning robot when cleaning the floor, The amount of water consumed when cleaning the floor, the amount of dirt collected when the cleaning robot cleans the floor, the area of the floor cleaned by the cleaning robot, and the path length of the floor cleaned by the cleaning robot.
示例性的,所述工作量包括清洁机器人清洁地面的面积时,所述工作量值域范围的上限值可以根据拖擦件的清洁效果与清洁机器人清洁地面的面积的变化关系确定;例如在清洁机器人维护后控制清洁机器人对地面进行清洁,当清洁效果较差时,根据清洁机器人清洁的地面的面积确定所述工作量值域范围的上限值;其中,对机器人的维护包括对拖擦件进行清洗或更换、对清洁机器人进行充电、对清洁机器人的水箱进行补水或排水、对清洁机器人的尘盒进行排空等。For example, when the workload includes the area of the floor cleaned by the cleaning robot, the upper limit of the workload value range can be determined based on the changing relationship between the cleaning effect of the mopping element and the area of the floor cleaned by the cleaning robot; for example, in After the cleaning robot is maintained, the cleaning robot is controlled to clean the floor. When the cleaning effect is poor, the upper limit of the workload value range is determined based on the area of the floor cleaned by the cleaning robot; wherein, the maintenance of the robot includes mopping. Clean or replace parts, charge the cleaning robot, replenish or drain the water tank of the cleaning robot, empty the dust box of the cleaning robot, etc.
示例性的,所述工作量包括拖擦件拖擦地面时吸附的脏污量时,所述工作量值域范围的上限值可以根据拖擦件的清洁效果与拖擦件拖擦地面时吸附的脏污量的变化关系确定;例如在拖擦件维护后对地面进行拖擦,当拖擦件对地面的拖擦清洁效果很差时,根据拖擦件吸附的脏污量,即根据拖擦件的脏污值d确定所述工作量值域范围的上限值;当然也不限于此,例如所述工作量值域范围的上限值可以根据所述拖擦件的最大脏污值d_max确定,最大脏污值d_max为经验值,例如可以在实验室中测得。举例而言,工作量值域范围的下限值可以根据所述工作量值域范围的上限值确定,例如为上限值的0.6倍至0.8倍。For example, when the workload includes the amount of dirt absorbed by the mopping element when mopping the floor, the upper limit of the workload value range can be based on the cleaning effect of the mopping element and the amount of dirt absorbed by the mopping element when mopping the floor. The changing relationship between the amount of dirt adsorbed is determined; for example, when the floor is mopped after maintenance of the mop piece, and the mopping effect of the mop piece on the floor is very poor, the amount of dirt adsorbed by the mop piece is determined by the amount of dirt adsorbed by the mop piece. The dirt value d of the mopping part determines the upper limit of the workload value range; of course, it is not limited to this. For example, the upper limit of the workload value range can be based on the maximum dirt of the mopping part. The value d_max is determined, and the maximum dirt value d_max is an empirical value, which can be measured in a laboratory, for example. For example, the lower limit of the workload value range can be determined based on the upper limit of the workload value range, for example, 0.6 to 0.8 times the upper limit.
在一些实施方式中,所述根据所述工作量值域范围和所述图形学特征,确定所述房间的分割线,包括:根据所述图形学特征和/或所述房间的房间标识,确定所述房间中各单位区域的工作量;根据所述工作量值域范围和各所述单位区域的工作量,确定房间的分割线,以使各所述预设清洁区域中单位区域的工作量之和均小于或等于所述上限值;或者,根据所述工作量值域范围和各所述单位区域的工作量,确定房间的分割线,以使仅有一个所述预设清洁区域的工作量的量值小于所述下限值,且工作量的量值小于所述下限值的所述预设清洁区域的清洁顺序在其他所述预设清洁区域之后。In some embodiments, determining the dividing line of the room based on the workload value range and the graphical characteristics includes: determining based on the graphical characteristics and/or the room identification of the room. The workload of each unit area in the room; according to the workload value range and the workload of each unit area, determine the dividing line of the room so that the workload of the unit area in each of the preset cleaning areas The sum is less than or equal to the upper limit value; or, according to the workload value range and the workload of each unit area, determine the dividing line of the room so that there is only one preset cleaning area. The magnitude of the workload is less than the lower limit value, and the cleaning sequence of the preset cleaning area whose magnitude value of the workload is less than the lower limit value is after the other preset cleaning areas.
举例而言,所述单位区域可以为清洁任务地图中的栅格,当然也不限于此,单位区域可以为任意面积的区域,如0.5平方米大小的区域、1平方米大小的区域;单位区域可以为矩形或正方形,当然也不限于此,例如为平行四边形。For example, the unit area can be a grid in the cleaning task map, but of course it is not limited to this. The unit area can be an area of any size, such as an area of 0.5 square meters or an area of 1 square meter; the unit area It may be a rectangle or a square, and of course is not limited thereto, for example, it may be a parallelogram.
示例性的,同一房间中不同单位区域的工作量存在差别,例如往往靠近墙角或有较多 障碍物的地方是更脏的区域;示例性的,可以根据所述单位区域和所述房间的边界和/或所述房间中的障碍物之间的距离确定所述单位区域的工作量。举例而言,所述单位区域的工作量,与所述单位区域和所述房间的边界和/或所述房间中的障碍物之间的距离负相关。For example, there are differences in the workload of different unit areas in the same room. For example, areas near corners or with more obstacles are often dirtier areas. For example, the workload can be determined according to the boundaries of the unit area and the room. and/or the distance between obstacles in the room determines the workload per unit area. For example, the workload of the unit area is negatively correlated with the distance between the unit area and the boundary of the room and/or obstacles in the room.
举例而言,如图69所示,环境地图中包含多个栅格,一个栅格即为一个单位区域,或者多个栅格组合为一个单位区域,计算环境地图中每个栅格与障碍物的距离,从而确定每个单位区域的工作量,多个栅格组合为一个单位区域时根据所述多个栅格与障碍物的最大距离、最小距离或者距离的平均值确定所述单位区域的工作量;越是接近障碍物的单位区域,工作量越大,或者可以说清洁机器人清洁该单位区域的清洁代价更高。图69中,S1表示障碍物,黑色粗线表示墙壁,每个栅格上的数字表示该栅格的工作量;例如,与障碍物或墙壁相邻的栅格(可以称为距离为1个单位的栅格),工作量为5,距离为2个单位的栅格的工作量为3,距离大于2个单位的栅格的工作量为1;清洁区域S2的工作量为5+5+5+3=18,清洁区域S3的工作量为1+3+1+3=8。For example, as shown in Figure 69, the environment map contains multiple grids. One grid is a unit area, or multiple grids are combined into a unit area. Calculate the distance between each grid and obstacles in the environment map. distance, thereby determining the workload of each unit area. When multiple grids are combined into one unit area, the maximum distance, minimum distance, or average value of the distances between the multiple grids and obstacles is determined. Workload; the closer the unit area is to the obstacle, the greater the workload, or it can be said that the cleaning cost of the cleaning robot to clean the unit area is higher. In Figure 69, S1 represents an obstacle, the thick black line represents a wall, and the number on each grid represents the workload of that grid; for example, a grid adjacent to an obstacle or wall (which can be called a distance of 1 unit), the workload is 5, the workload of the grid with a distance of 2 units is 3, the workload of the grid with a distance greater than 2 units is 1; the workload of the cleaning area S2 is 5+5+ 5+3=18, the workload of cleaning area S3 is 1+3+1+3=8.
示例性的,不同房间中单位区域的工作量存在差别,例如往往餐厅/客厅等人员活动较多的地方是更容易脏的区域,而卧室/书房等人员活动较少的地方是较干净的区域;举例而言,房间标识为餐厅/客厅的房间中单位区域的工作量,大于卧室/书房中单位区域的工作量。For example, there are differences in the workload of unit areas in different rooms. For example, places with more people's activities, such as dining rooms/living rooms, are areas that are more likely to get dirty, while places with less people's activities, such as bedrooms/studies, are cleaner areas. ;For example, the workload of the unit area in the room marked as dining room/living room is greater than the workload of the unit area in the bedroom/study.
在一些实施方式中,所述房间的图形学特征包括房间中脏污的分布情况(如脏污热力图),例如各单位区域的脏污程度;可以根据房间中单位区域的脏污程度确定各所述单位区域的工作量;例如所述单位区域的工作量,与所述单位区域的脏污程度正相关。In some embodiments, the graphical characteristics of the room include the distribution of dirt in the room (such as a dirt heat map), such as the dirt level of each unit area; each unit area can be determined based on the dirt level of the unit area in the room. The workload of the unit area; for example, the workload of the unit area is positively correlated with the degree of dirt of the unit area.
示例性的,房间中脏污的分布情况可以根据清洁机器人的传感器,如视觉传感器的检测结果确定;或者可以根据单独的图像传感器对房间内的地面进行拍摄,对拍摄的图像进行识别,确定房间中脏污的分布情况;或者可以在清洁机器人对房间中的不同区域清洁完成后,根据清洁拖擦件的污水的检测信息确定不同区域的脏污情况,或者根据集尘盒中的脏污量确定不同区域的脏污情况。For example, the distribution of dirt in the room can be determined based on the detection results of the cleaning robot's sensors, such as vision sensors; or a separate image sensor can be used to photograph the floor in the room, identify the captured images, and determine the room. The distribution of dirt in the room; or after the cleaning robot completes cleaning different areas in the room, the dirt status in different areas can be determined based on the detection information of the sewage in the cleaning mop parts, or based on the amount of dirt in the dust box Determine the dirtiness of different areas.
需要说明的是,房间中脏污的分布情况可以为房间中当前的脏污的分布情况,还可以为历史数据中房间中脏污的分布情况。It should be noted that the distribution of dirt in the room can be the current distribution of dirt in the room, or it can also be the distribution of dirt in the room in historical data.
相较于现有的按固定工作时间对清洁机器人进行维护,如每清扫10分钟回洗一次,或者按固定的任务工作面积对清洁机器人进行维护,如清扫10平米回洗,固定工作时间或固定的任务工作面积并不能真正体现清洁机器人的工作量,如拖擦件真正的消耗量。本申请实施例可以通过根据所述图形学特征和/或所述房间的房间标识,确定所述房间中各单位区域的工作量,以及根据各单位区域的工作量对房间分割得到预设清洁区域,可以更真实的体现清洁机器人在所述预设清洁区域的工作量,如拖擦件的脏污吸附量,能够保证清洁机器人有较好的清洁效果和较高的清洁效率。Compared with the existing maintenance of cleaning robots based on fixed working hours, such as backwashing every 10 minutes, or maintaining cleaning robots based on fixed task working areas, such as cleaning 10 square meters and backwashing, fixed working hours or fixed The task working area does not truly reflect the workload of the cleaning robot, such as the real consumption of mopping parts. Embodiments of the present application can determine the workload of each unit area in the room based on the graphical characteristics and/or the room identification of the room, and divide the room according to the workload of each unit area to obtain the preset cleaning area. , can more truly reflect the workload of the cleaning robot in the preset cleaning area, such as the amount of dirt adsorbed by the mopping parts, and can ensure that the cleaning robot has a better cleaning effect and higher cleaning efficiency.
在一些实施方式中,所述根据所述工作量值域范围和所述图形学特征,确定所述房间的分割线,以使所述分割线和所述房间的边界形成至少两个预设清洁区域,包括:根据所述工作量值域范围和所述图形学特征确定所述房间被划分后形成的各区域的预设工作量;沿所述边界的长边移动所述分割线,以及确定所述分割线划分的区域的工作量;当所述分割线划分的至少一个区域的工作量等于对应的预设工作量时,停止移动所述分割线。In some embodiments, the dividing line of the room is determined based on the workload value range and the graphical characteristics, so that the dividing line and the boundary of the room form at least two preset cleaning Region, including: determining the preset workload of each region formed after the room is divided according to the workload value range and the graphical characteristics; moving the dividing line along the long side of the boundary, and determining The workload of the area divided by the dividing line; when the workload of at least one area divided by the dividing line is equal to the corresponding preset workload, stop moving the dividing line.
示例性的,当所述房间的工作量大于所述上限值时,确定所述房间的分割线,以使所述分割线和所述房间的边界形成至少两个预设清洁区域;举例而言,如图68所示,对客厅进行分割,该客厅的总面积为48平方米,根据所述工作量值域范围确定所述房间被划分后形成的区域包括一预设工作量,如面积为6平方米的区域。Exemplarily, when the workload of the room is greater than the upper limit, the dividing line of the room is determined so that the dividing line and the boundary of the room form at least two preset cleaning areas; for example In other words, as shown in Figure 68, the living room is divided. The total area of the living room is 48 square meters. According to the workload value range, it is determined that the area formed after the room is divided includes a preset workload, such as the area for an area of 6 square meters.
示例性的,按照房间的最长边对房间进行分割。请参阅图68,客厅的横向长度为8m,纵向长度为6m,房间的最长边为横向的边,需要划分出工作量等于6平方米的预设清洁区域;如图68中箭头左侧所示,本申请实施例沿横向移动分割线(以虚线表示),在沿横向移动分割线的过程中确定划分的区域中是否有工作量无限接近6平方米(可视为等于6平方米) 的区域,当有划分的区域的工作量达到6平方米时停止分割线的移动。可以理解的,按照房间的最长边对房间进行分割,一方面,分割线移动的时候,划分区域的工作量的变化量比较小,可以更容易控制划分区域的工作量,使划分区域的工作更大程度地与预设工作量相符;另一方面,可以更大程度地避免出现狭长区域(如图68中箭头右侧所示,沿纵向(短边)移动分割线时,6平方米的区域长8米,为狭长区域),从而降低清洁机器人的清洁难度。For example, the room is divided according to the longest side of the room. Please refer to Figure 68. The horizontal length of the living room is 8m and the vertical length is 6m. The longest side of the room is the horizontal side. It is necessary to divide a preset cleaning area with a workload equal to 6 square meters; as shown on the left side of the arrow in Figure 68 As shown, the embodiment of the present application moves the dividing line (indicated by a dotted line) laterally, and in the process of moving the dividing line laterally, it is determined whether there is a workload infinitely close to 6 square meters (can be regarded as equal to 6 square meters) in the divided area. area, stop moving the dividing line when the workload of the divided area reaches 6 square meters. It is understandable that the room is divided according to the longest side of the room. On the one hand, when the dividing line moves, the change in the workload of dividing the area is relatively small, which makes it easier to control the workload of dividing the area and make the work of dividing the area easier. It is more consistent with the preset workload; on the other hand, it can avoid the appearance of long and narrow areas to a greater extent (as shown on the right side of the arrow in Figure 68, when the dividing line is moved longitudinally (short side), 6 square meters The area is 8 meters long and is a long and narrow area), thereby reducing the difficulty of cleaning by the cleaning robot.
需要说明的是,分割线可以是直线、曲线或者形成一个图形的封闭线(如图71中形成区域S的分割线),或者为不同线型的组合。It should be noted that the dividing line may be a straight line, a curve, or a closed line forming a figure (such as the dividing line forming the area S in Figure 71), or a combination of different line types.
可选的,如图68所示,所述分割线与所述长边垂直。以使划分的预设清洁区域方正,便于规划清洁路径。Optionally, as shown in Figure 68, the dividing line is perpendicular to the long side. In order to make the divided preset cleaning area square and easy to plan the cleaning path.
在一些实施方式中,跟据所述工作量值域范围划分预设清洁区域,相对于按固定阈值划分区域,可以生成多种划分方案,例如任意两个不同的划分方案中至少有一条分割线不同,以使任意两个不同的划分方案中至少有一个预设清洁区域不同;以及从所述多种划分方案中确定符合预设条件的划分方案。In some embodiments, the preset cleaning area is divided according to the workload value range. Instead of dividing the area according to a fixed threshold, multiple division schemes can be generated. For example, there is at least one dividing line in any two different division schemes. Different, so that at least one preset cleaning area in any two different division schemes is different; and a division scheme that meets the preset conditions is determined from the multiple division schemes.
示例性的,可以根据所述工作量值域范围、至少两个所述房间的清洁顺序,以及各所述房间的面积,确定至少两个划分方案,任意两个所述划分方案中至少有一条分割线不同,以使所述任意两个所述划分方案中至少有一个预设清洁区域不同。举例而言,请参阅图70,需要清洁的三个房间的面积分别为3、8、7平方米,房间清洁顺序为3平方米的房间-8平方米的房间-7平方米的房间,即图70中房间清洁顺序为房间1-房间2-房间3,通过根据房间的清洁顺序划分房间得到各预设清洁区域,即房间划分的顺序是基于房间清洁的顺序,如图70所示的各划分方案,首先考虑房间1的划分情况,其次考虑房间2的划分情况,最后考虑房间3的划分情况,如此可以保证在按照房间的清洁顺序对各预设清洁区域进行清洁时,均可得到较好的清洁效果和清洁效率。For example, at least two division schemes may be determined based on the workload value range, the cleaning order of at least two of the rooms, and the area of each of the rooms, and at least one of any two division schemes must be The dividing lines are different, so that at least one preset cleaning area in any two dividing schemes is different. For example, please refer to Figure 70. The areas of the three rooms that need to be cleaned are 3, 8, and 7 square meters respectively. The order of room cleaning is 3 square meters of room - 8 square meters of room - 7 square meters of room, that is In Figure 70, the room cleaning sequence is Room 1 - Room 2 -
可选的,至少两个所述房间的清洁顺序可以根据房间距离基站的距离确定,例如先清洁距离基站较远的房间,可以防止吸附有脏污的拖擦件二次污染已经清洁干净的地面。Optionally, the cleaning order of at least two of the rooms can be determined based on the distance between the rooms and the base station. For example, cleaning the room farther away from the base station first can prevent the dirty mop parts from contaminating the cleaned floor for a second time. .
可选的,至少两个所述房间的清洁顺序可以根据房间的脏污程度的距离确定,例如先清洁脏污程度较高的房间,后清洁脏污程度较低的房间,可有效防止出现二次污染。Optionally, the cleaning order of at least two of the rooms can be determined according to the distance between the rooms with a degree of dirt. For example, the room with a higher degree of dirt is cleaned first, and then the room with a lower degree of dirt is cleaned, which can effectively prevent the occurrence of two rooms. pollution.
举例而言,请参阅图70,按照工作量值域范围为5-7平方米划分时,所有划分方案中,除了部分划分方案中最后清洁的预设清洁区域之外的各个预设清洁区域的面积都在5-7平方米以内,不同的划分方案包括图示的划分方案1至划分方案3;其中,划分方案1将房间2的2平方米的区域与房间1的3平方米的区域合并作为一个5平方米的预设清洁区域1,房间2剩下的6平方米区域作为预设清洁区域2,将房间3的7平方米的区域作为预设清洁区域3(划分方案1可以表示为3+2|6|7);划分方案2将房间2的3平方米的区域与房间1的3平方米的区域合并作为一个6平方米的预设清洁区域1,房间2剩下的5平方米区域作为预设清洁区域2,将房间3的7平方米的区域作为预设清洁区域3(划分方案2可以表示为3+3|5|7);划分方案3将房间2的2平方米的区域与房间1的3平方米的区域合并作为一个5平方米的预设清洁区域1,在房间2剩下的6平方米区域划分出一个5平方米的预设清洁区域2,将房间2剩下的1平方米与房间3的5平方米的区域合并作为一个6平方米的预设清洁区域3,以及房间3剩下的2平方米区域作为预设清洁区域4(划分方案3可以表示为3+2|5|1+5|2)。当然也不限于此,例如划分方案还包括以下至少一种:3+2|6|7、3+2|6|5|2、3+2|6|6|1、3+2|6+1|6、3+2|5|1+4|3、……、3+3|5+1|6、3+3|5+2|5、……;其中符号|用于区分不同的预设清洁区域,符号+用于表示预设清洁区域的面积是不同房间中区域的面积累加得到的。For example, please refer to Figure 70. When divided according to the workload value range of 5-7 square meters, in all division plans, except for the preset cleaning area that was cleaned last in some division plans, the The areas are all within 5-7 square meters. Different division plans include division plan 1 to division plan 3 as shown in the figure; among them, division plan 1 merges the 2 square meters area of room 2 with the 3 square meters area of room 1 As a preset cleaning area 1 of 5 square meters, the remaining 6 square meters of room 2 is used as preset cleaning area 2, and the 7 square meters area of room 3 is used as preset cleaning area 3 (division scheme 1 can be expressed as 3+2|6|7); Division plan 2 combines the 3 square meters area of room 2 with the 3 square meters area of room 1 as a 6 square meter preset cleaning area 1, and the remaining 5 square meters of room 2 m area as the default cleaning area 2, and the 7 square meters area of room 3 as the default cleaning area 3 (division plan 2 can be expressed as 3+3|5|7); the division plan 3 uses the 2 square meters of room 2 The area of 3 square meters in room 1 is combined into a 5 square meter preset cleaning area 1, and a 5 square meter preset cleaning area 2 is divided into the remaining 6 square meters in room 2, and room 2 is The remaining 1 square meter is combined with the 5 square meters area of room 3 as a 6 square meter preset cleaning area 3, and the remaining 2 square meters area of room 3 is used as a preset cleaning area 4 (division scheme 3 can be expressed is 3+2|5|1+5|2). Of course, it is not limited to this. For example, the division scheme also includes at least one of the following: 3+2|6|7, 3+2|6|5|2, 3+2|6|6|1, 3+2|6+ 1|6, 3+2|5|1+4|3,..., 3+3|5+1|6, 3+3|5+2|5,...; the symbol | is used to distinguish different The preset cleaning area, the symbol + is used to indicate that the area of the preset cleaning area is the sum of the areas in different rooms.
示例性的,可以根据所述划分方案确定的各预设清洁区域,确定完成各所述预设清洁区域时的代价值,根据每个划分方案中各预设清洁区域对应的代价值确定各划分方案的代价累加值,从所述代价累加值满足预设代价条件的至少两个划分方案中选择一个划分方案对应 的分割线为至少两个所述房间的分割线,或者确定所述代价累加值最小的划分方案对应的分割线为至少两个所述房间的分割线。For example, the cost value for completing each preset cleaning area may be determined based on each preset cleaning area determined in the division scheme, and each division may be determined based on the cost value corresponding to each preset cleaning area in each division scheme. The cumulative cost value of the plan is to select the dividing line corresponding to one division plan from at least two division schemes whose cumulative cost value satisfies the preset cost condition as the dividing line of at least two of the rooms, or determine the cumulative cost value. The dividing line corresponding to the smallest dividing scheme is the dividing line of at least two of the rooms.
举例而言,代价值可以通过清洁机器人中断清洁任务的次数体现,即通过返回基站进行维护的次数体现,根据各划分方案中清洁机器人中断清洁任务的次数确定最终的划分方案;例如选取中断清洁任务的次数最少的划分方案为最终的划分方案,此时符合预设条件的划分方案即为中断清洁任务的次数最少的划分方案,即中断清洁任务的次数最少则表征代价值最低,划分预设清洁区域时,优先选择让清洁机器人中断清洁任务的次数尽可能少的划分方案,从而减少清洁机器人往返基站的消耗,以提高整个清洁任务的效率。请参阅图70,划分方案1和划分方案2中预设清洁区域1、2、3各完成一遍清洁时均需要中断1次,则各个预设清洁区域的代价值均可计为1,则划分方案1和划分方案2的代价累加值均计为3;划分方案3中预设清洁区域1、2、3、4各完成一遍清洁时均需要中断1次,则各个预设清洁区域的代价值均可计为1,则划分方案3的代价累加值计为4。如果预设代价条件为代价累加值小于等于3,则划分方案1、划分方案2满足预设代价条件,即划分方案1和划分方案2可作为备选方案。举例而言,可以确定各划分方案中清洁机器人中断清洁任务时的位置,确定中断清洁任务时清洁机器人的位置不在清洁机器人所在房间的门口的次数,根据各划分方案中清洁机器人中断清洁任务时的位置不在清洁机器人所在房间的门口的次数确定最终的划分方案,即代价值可以通过清洁机器人中断清洁任务时的位置不在清洁机器人所在房间的门口的次数体现;例如选取清洁机器人中断清洁任务时的位置不在清洁机器人所在房间的门口的次数最少的划分方案为最终的划分方案,此时符合预设条件的划分方案即为清洁机器人中断清洁任务时的位置不在清洁机器人所在房间的门口的次数最少的划分方案,即清洁机器人中断清洁任务时的位置不在清洁机器人所在房间的门口的次数最少则表征代价值最低,划分预设清洁区域时,优先选择清洁机器人中断清洁任务时的位置不在其所在房间的门口次数最少的划分方案,从而降低清洁机器人因为跨越不同房间进行清洁而造成交叉污染的可能性,以提高整个清洁任务的效率的同时兼顾清洁效果。请参阅图70,阴影线填充的矩形图案表示房间门口,阴影线填充的圆形图案表示基站的位置;划分方案1和划分方案2在预设清洁区域1中断清洁任务时的位置不在房间2的门口,则预设清洁区域1的代价值计为1,在预设清洁区域2中断清洁任务时的位置在房间2的门口,则预设清洁区域2的代价值可计为0,在完成预设清洁区域3的清洁中断或结束清洁任务时,清洁机器人可以直接进入基站,此时可将清洁机器人的位置视为在房间3的门口,则预设清洁区域3的代价值可计为0,即划分方案1和划分方案2对应的中断清洁任务时的位置不在房间门口的次数均为1次,代价累加值均可计为1;划分方案3在预设清洁区域1、预设清洁区域2、预设清洁区域3中断清洁任务时的位置均不在清洁机器人所在的房间的门口,则预设清洁区域1、2、3的代价值均可计为1,在完成预设清洁区域4的清洁中断或结束清洁任务时,清洁机器人可以直接进入基站,此时可将清洁机器人的位置视为在房间3的门口,则预设清洁区域4的代价值可计为0,即划分方案3对应的中断清洁任务时的位置不在房间的门口的次数为3次,代价累加值计为3;如果预设代价条件为代价累加值小于等于2,则划分方案1、划分方案2满足预设代价条件,即划分方案1和划分方案2可作为备选方案。For example, the cost value can be reflected by the number of times the cleaning robot interrupts the cleaning task, that is, the number of times it returns to the base station for maintenance. The final partitioning scheme is determined based on the number of times the cleaning robot interrupts the cleaning task in each partitioning scheme; for example, choosing to interrupt the cleaning task The division plan with the least number of interruptions is the final division plan. At this time, the division plan that meets the preset conditions is the division plan that interrupts the cleaning tasks the least frequently. That is, the least number of interruptions in the cleaning tasks represents the lowest value. The preset cleaning division When it comes to areas, priority is given to a division scheme that allows the cleaning robot to interrupt the cleaning task as little as possible, thereby reducing the consumption of the cleaning robot traveling to and from the base station to improve the efficiency of the entire cleaning task. Please refer to Figure 70. The
举例而言,当有多个划分方案的代价累加值均小于或等于预设的代价阈值时,可以从所述多个划分方案中任选一个划分方案;或者当有多个划分方案的代价累加值均小于其他划分方案的代价累加值时,可以从所述多个划分方案中任选一个划分方案。通过确定各划分方案的代价累加值,选择代价累加值较小的划分方案为最终的划分方案,可以提高整个清洁任务的清洁效率,同时还兼顾了清洁机器人的清洁效果。For example, when the cumulative cost values of multiple partitioning schemes are all less than or equal to the preset cost threshold, you can select any one of the multiple partitioning schemes; or when the cumulative costs of multiple partitioning schemes are When the values are all smaller than the cumulative cost values of other partitioning schemes, any one of the multiple partitioning schemes can be selected. By determining the cumulative cost value of each division scheme and selecting the division scheme with a smaller cumulative cost value as the final division scheme, the cleaning efficiency of the entire cleaning task can be improved, while also taking into account the cleaning effect of the cleaning robot.
示例性的,所述确定完成各所述预设清洁区域时的代价值,包括:确定完成各所述预设清洁区域的工作量之后所述清洁机器人所在房间和回洗点,所述回洗点为所述机器人一个所述预设清洁区域完成一遍清洁并需要返回所述基站时所在的位置;根据所述清洁机器人所 在房间和所述回洗点,确定所述代价值。举例而言,如图70中的划分方案1和划分方案2,完成预设清洁区域1的工作量之后所述清洁机器人所在房间为房间2,回洗点不在房间2的门口;完成预设清洁区域2的工作量之后所述清洁机器人所在房间为房间2,回洗点在房间2的门口;完成预设清洁区域3的工作量之后所述清洁机器人所在房间为房间3,清洁机器人可以直接进入基站,此时可视为回洗点在房间3的房间门口。如图70中的划分方案3,完成预设清洁区域1的工作量之后所述清洁机器人所在房间为房间2,回洗点不在房间2的门口;完成预设清洁区域2的工作量之后所述清洁机器人所在房间为房间2,回洗点不在房间2的门口;完成预设清洁区域3的工作量之后所述清洁机器人所在房间为房间3,回洗点不在房间3的门口;完成预设清洁区域4的工作量之后所述清洁机器人所在房间为房间3,清洁机器人可以直接进入基站,此时可视为回洗点在房间3的房间门口。Exemplarily, the determination of the cost value when completing each of the preset cleaning areas includes: determining the room where the cleaning robot is located and the backwashing point after completing the workload of each of the preset cleaning areas. The point is the location where the robot completes one of the preset cleaning areas and needs to return to the base station; the cost value is determined based on the room where the cleaning robot is located and the backwash point. For example, as shown in the
举例而言,所述根据所述清洁机器人所在房间和所述回洗点,确定所述代价值包括:根据所述清洁机器人所在房间和所述回洗点确定代价因素量值;根据所述代价因素量值确定所述代价值。For example, determining the cost value based on the room where the cleaning robot is located and the backwash point includes: determining the cost factor value based on the room where the cleaning robot is located and the backwash point; The factor magnitude determines the value of the consideration.
可选的,所述代价因素量值至少包括以下至少一种:所述清洁机器人从所述回洗点到所述清洁机器人所在房间的门口的距离、所述清洁机器人从所述回洗点运动到所述基站经过的房间或预设区域的数量、所述清洁机器人从所述回洗点运动到所述基站的路径长度、所述清洁机器人从所述基站返回到所述回洗点或下一个预设清洁区域经过的房间或预设区域的数量、所述清洁机器人从所述基站返回到所述回洗点或待清洁的预设清洁区域的路径长度;其中,所述代价值与各所述代价因素量值呈正相关的关系。Optionally, the cost factor magnitude includes at least one of the following: the distance of the cleaning robot from the backwash point to the doorway of the room where the cleaning robot is located, the movement of the cleaning robot from the backwash point The number of rooms or preset areas passed by the base station, the path length of the cleaning robot from the backwash point to the base station, the cleaning robot returning from the base station to the backwash point or the next The number of rooms or preset areas that a preset cleaning area passes through, the path length of the cleaning robot returning from the base station to the backwash point or the preset cleaning area to be cleaned; wherein the cost value is related to each The cost factors are positively correlated.
通过根据前述的代价因素量值确定完成各所述预设清洁区域时的代价值,以及每个划分方案中各预设清洁区域对应的代价值确定各划分方案的代价累加值,确定最终的划分方案,可以提高整个清洁任务的清洁效率。The final division is determined by determining the cost value when completing each of the preset cleaning areas based on the aforementioned cost factor values, and determining the cumulative cost value of each division plan based on the cost value corresponding to each preset clean area in each division plan. solution, which can improve the cleaning efficiency of the entire cleaning task.
举例而言,请参阅图70,回洗点落在房间的门口时,回洗点到清洁机器人所在房间的门口的距离为0,即代价因素量值为0,清洁该预设清洁区域对应的代价值为1,回洗点落在房间内时,回洗点到清洁机器人所在房间的门口的距离不为0,即代价因素量值不为0,清洁该预设清洁区域对应的代价值为2,对于划分方案1和划分方案2,清洁预设清洁区域1对应的代价值为2,清洁预设清洁区域2和预设清洁区域3的代价值均为1,所以划分方案1和划分方案2累计的总代价值,即代价累加值均为2+1+1=4;对于划分方案3,清洁预设清洁区域1至预设清洁区域3对应的代价值均为2,清洁预设清洁区域4的代价值为1,所以划分方案3累计的总代价值,即代价累加值为2+2++2+1=7;如果预设代价条件为代价累加值小于等于4,则划分方案1和划分方案2作为备选划分方案。当然预设清洁区域对应的代价值的确定也不限于此,还可以针对代价量值做进一步地考虑,例如回洗点与机器人所在房间的门口的距离越远则,代价量值越大,代价值越高,如可以为3、4或5等;举例而言,如图70所示,划分方案1中清洁机器人清洁预设清洁区域1的回洗点a与房间2的门口B的距离大于划分方案2中清洁机器人清洁预设清洁区域1的回洗点a与房间2的门口B的距离,因此,划分方案1中预设清洁区域1对应的代价值,大于划分方案2中预设清洁区域1对应的代价值。For example, please refer to Figure 70. When the backwash point falls at the door of the room, the distance from the backwash point to the door of the room where the cleaning robot is located is 0, that is, the cost factor value is 0. Clean the preset cleaning area corresponding to The cost value is 1. When the backwash point falls in the room, the distance from the backwash point to the door of the room where the cleaning robot is located is not 0, that is, the cost factor value is not 0. The cost value corresponding to cleaning the preset cleaning area is 2. For the
在一些实施方式中,所述房间至少包含两个,所述根据所述工作量值域范围和所述图形学特征,确定所述房间的分割线,以使所述分割线和所述房间的边界形成至少两个预设清洁区域,包括:当第一房间的工作量的量值小于所述工作量值域范围的最小值,且第一房间的工作量的量值和第二房间的工作量的量值之和大于所述上限值,根据所述工作量值域范围和所述第二房间的图形学特征,确定所述第二房间的分割线,以使所述分割线和所述第二房间的边界形成至少两个区域,且有至少一个区域的工作量的量值与所述第一房间的工作量的量值之和小于或等于所述上限值;将所述至少一个区域和所述第一房间的区域确定为一个预设清洁区域。In some embodiments, the room contains at least two, and the dividing line of the room is determined based on the workload value range and the graphical characteristics, so that the dividing line and the room The boundary forms at least two preset cleaning areas, including: when the magnitude of the workload in the first room is less than the minimum value of the workload value range, and the magnitude of the workload in the first room and the magnitude of the workload in the second room are The sum of the magnitudes of the quantities is greater than the upper limit value, and the dividing line of the second room is determined according to the workload value range and the graphical characteristics of the second room, so that the dividing line and the The boundary of the second room forms at least two areas, and the sum of the magnitude of the workload of at least one area and the magnitude of the workload of the first room is less than or equal to the upper limit; the at least An area and the area of the first room are determined as a preset cleaning area.
举例而言,请参阅图70,其中房间1的面积小于5平方米,房间2的面积大于7平方米,在划分方案2中,则可以将房间2划分为3平方米的区域和5平方米的区域;通过将房间1与房间2的3平方米的区域合并作为一个预设清洁区域,可以减少清洁机器人返回基站进行维护的次数。举例而言,清洁完房间1的3平方米后不返回基站,而是在房间2清洁3平方米后返回基站,然后在房间2再清洁5平方米后返回基站,以及在房间3清洁7平方米后返回基站,仅需返回三次;而且在第二次、第三次返回基站时,清洁机器人的位置,即回洗点都可以落在房间恰好清洁完的地方,如房间门口;以使返回基站的动作对清洁路径规划的影响被降低,相较于划分方案3降低了清洁的代价值,可以提高清洁效率。For example, please refer to Figure 70, where the area of
在一些实施方式中,在划分出工作量在所述工作量值域范围中的预设清洁区域之后,当所述房间中除所述预设清洁区域之外的剩余区域的工作量大于所述上限值时,可以继续通过分割线对所述剩余区域进行划分。请参阅图68,在48平米的房间中划分出一个6平方米的预设清洁区域之后,剩余区域的工作量42平方米大于所述上限值,可以继续通过所述分割线对剩余区域进行划分。In some embodiments, after dividing the preset cleaning area with a workload within the workload value range, when the workload of the remaining areas in the room except the preset cleaning area is greater than the When the upper limit is reached, the remaining area can continue to be divided by dividing lines. Please refer to Figure 68. After dividing a 6 square meter preset cleaning area in a 48 square meter room, the workload of the remaining area of 42 square meters is greater than the upper limit. You can continue to clean the remaining area through the dividing line. divide.
在一些实施方式中,各所述预设清洁区域的工作量的量值均小于或等于所述上限值,且大于或等于所述工作量值域范围中的下限值。一方面,可以解决因为预设清洁区域的区域面积过小导致清洁机器人需要频繁返回基站维护的问题;另一方面,还可以解决因为预设清洁区域的区域面积过大导致清洁机器人清洁力不足,从而影响清洁机器人的清洁效果的问题,即可以降低清洁机器人维护的频率,充分利用清洁机器人的性能,保证清洁机器人的清洁效率。In some embodiments, the magnitude of the workload of each of the preset cleaning areas is less than or equal to the upper limit value, and greater than or equal to the lower limit value in the workload value range. On the one hand, it can solve the problem that the cleaning robot needs to frequently return to the base station for maintenance because the area of the preset cleaning area is too small. On the other hand, it can also solve the problem of insufficient cleaning power of the cleaning robot because the area of the preset cleaning area is too large. Therefore, problems that affect the cleaning effect of the cleaning robot can be reduced, that is, the frequency of maintenance of the cleaning robot can be reduced, the performance of the cleaning robot can be fully utilized, and the cleaning efficiency of the cleaning robot can be ensured.
在一些实施方式中,仅有一所述预设清洁区域的工作量的量值小于所述下限值,且工作量的量值小于所述下限值的所述预设清洁区域的清洁顺序在其他预设清洁区域之后。In some embodiments, the magnitude of the workload of only one of the preset cleaning areas is less than the lower limit, and the cleaning sequence of the preset cleaning area whose magnitude of the workload is less than the lower limit is in After other preset cleaning areas.
示例性的,当所述房间划分出工作量的量值在所述工作量值域范围内的一个或多个预设清洁区域后剩余区域的工作量,如面积小于所述下限值,可以将所述剩余区域作为单独的一个预设清洁区域,如图70所示划分方案3中的预设清洁区域4。For example, when the room is divided into one or more preset cleaning areas with a workload within the workload value range, the workload of the remaining areas, if the area is less than the lower limit, can be Treat the remaining area as a separate preset cleaning area, and divide the
示例性的,当所述房间划分工作量的量值在所述工作量值域范围内的预设清洁区域后剩余区域的工作量小于所述下限值,可以将所述剩余区域与相邻的预设清洁区域合并;当合并后的区域的工作量大于所述上限值时,还可以根据所述工作量值域范围对合并后的区域进行划分,得到工作量的量值在所述工作量值域范围内的预设清洁区域。For example, when the magnitude of the room division workload is within the preset cleaning area within the workload value range and the workload of the remaining area is less than the lower limit, the remaining area can be separated from the adjacent area. The preset cleaning areas are merged; when the workload of the merged area is greater than the upper limit, the merged area can also be divided according to the workload value range to obtain the workload value in the Preset cleaning area within the workload value range.
在一些实施方式中,在所述根据所述工作量值域范围和所述图形学特征,确定所述房间的分割线,以使所述分割线和所述房间的边界划分出至少两个预设清洁区域之后,所述方法还包括:当所述预设清洁区域中有至少两个障碍物时,标记所述预设清洁区域为障碍物稠密区域,或者在所述预设清洁区域中确定所述障碍物稠密区域。In some embodiments, the dividing line of the room is determined based on the workload value range and the graphical characteristics, so that the dividing line and the boundary of the room divide at least two predetermined After setting up the cleaning area, the method further includes: when there are at least two obstacles in the preset cleaning area, marking the preset cleaning area as an obstacle-dense area, or determining in the preset cleaning area The obstacle-dense area.
举例而言,障碍物稠密区域例如为餐厅等有很多零碎凳子腿需要避障的区域,当然也不限于此。可以理解的,在清洁障碍物稠密区域时需要花费较长的时间,如果不将障碍物集中的区域聚合为一个区域,清洁机器人在侦测到障碍物时会绕障碍物清洁,清洁机器人会来回运动,无法集中处理障碍物,路径比较凌乱,可控性不高。请参阅图72和图73,清洁机器人沿弓形路径对预设清洁区域进行清洁,所示该预设清洁区域的左侧有四个障碍物S1至S4。如图72所示,清洁机器人清洁该预设清洁区域时的轨迹依次为轨迹1-8,其中在轨迹1碰到障碍物S1时,需要顺时针绕行障碍物S1一圈,即得到轨迹2;之后在轨迹3碰到障碍物S2时,需要顺时针绕行障碍物S2一圈,即得到轨迹4;之后在轨迹5碰到障碍物S2时,还需要顺时针绕行障碍物S2一圈;在轨迹5到达预设清洁区域的左侧时,此时预设清洁区域左侧的部分区域还未清洁,在对该部分区域清洁时碰到障碍物S3以及顺时针绕行障碍物S3一圈得到轨迹6;之后可以通过轨迹7对障碍物S2下侧的区域进行清洁;之后预设清洁区域左上角的部分区域还未清洁,在对该部分区域清洁时碰到障碍物S4以及顺时针绕行障碍物S4一圈得到轨迹8;请结合图73参阅图72,由此可以确定,如果不将障碍物集中的区 域聚合为一个区域,则清洁机器人的路径比较凌乱,可控性不高。本申请实施例可以通过将障碍物集中的区域聚合为障碍物稠密区域进行单独处理,可以使得清洁机器人先清洁不含障碍物的预设清洁区域或者清洁仅含少量障碍物或者分散的障碍物,减少该区域绕行障碍物的运动,可以保证清洁机器人具有较高的可控性,快速完成大部分区域的清洁,之后再清洁障碍物集中的区域。For example, an obstacle-dense area may be a restaurant or other area where there are many scattered stool legs that need to be avoided, but of course it is not limited to this. It is understandable that it takes a long time to clean areas with dense obstacles. If the areas with concentrated obstacles are not aggregated into one area, the cleaning robot will clean around the obstacles when it detects them, and the cleaning robot will go back and forth. Movement, unable to focus on handling obstacles, the path is messy, and controllability is not high. Referring to Figures 72 and 73, the cleaning robot cleans the preset cleaning area along an arcuate path. As shown, there are four obstacles S1 to S4 on the left side of the preset cleaning area. As shown in Figure 72, the trajectories of the cleaning robot when cleaning the preset cleaning area are trajectories 1-8. When
示例性的,所述障碍物稠密区域为所述至少两个预设清洁区域中最后清洁的预设清洁区域。通过在清洁完非障碍物稠密区域的预设清洁区域之后,集中清洁障碍物稠密区域,更符合用户对清洁的认知,非障碍物区域的清洁不会被打断,可以尽快清洁完大部分区域,用户体验较好。Exemplarily, the obstacle-dense area is the preset cleaning area that is cleaned last among the at least two preset cleaning areas. By cleaning the preset cleaning areas in non-obstacle-dense areas, cleaning the obstacle-dense areas in a concentrated manner is more in line with the user's understanding of cleaning. The cleaning of non-obstacle areas will not be interrupted, and most of the areas can be cleaned as quickly as possible. area, the user experience is better.
在另一些实施方式中,请参阅图71,所述根据所述工作量值域范围和所述图形学特征,确定所述房间的分割线,以使所述分割线和所述房间的边界划分出至少两个预设清洁区域,包括:根据所述房间中障碍物的分布情况,确定所述房间中的障碍物稠密区域,如图71中房间3的区域S;当所述房间中除所述障碍物稠密区域之外的其他区域的工作量的量值大于所述上限值时,根据所述工作量值域范围,确定所述房间的分割线,以使所述分割线和所述房间的边界,以及所述障碍物稠密区域的边界划分出至少两个预设清洁区域。即也可以先划分出房间中的障碍物稠密区域,然后对其余的区域进行划分得到其他的预设清洁区域。In other embodiments, please refer to Figure 71. The dividing line of the room is determined according to the workload value range and the graphical characteristics, so that the dividing line and the boundary of the room are divided Finding at least two preset cleaning areas includes: determining the obstacle-dense area in the room according to the distribution of obstacles in the room, such as area S of
示例性的,根据房间中各单位区域与障碍物的距离,确定各单位区域是否为所述障碍物稠密区域中的单位区域,例如与障碍物的距离小于预设距离阈值的单位区域组成所述障碍物稠密区域。Exemplarily, based on the distance between each unit area and obstacles in the room, it is determined whether each unit area is a unit area in the obstacle-dense area. For example, the unit area whose distance from the obstacle is less than a preset distance threshold constitutes the unit area. Areas with dense obstacles.
本申请实施例提供的清洁机器人的清洁区域划分方法,包括:获取房间的图形学特征,图形学特征包括房间的边界;获取工作量值域范围;根据工作量值域范围和图形学特征,确定房间的分割线,以使分割线和房间的边界形成至少两个预设清洁区域,各预设清洁区域的工作量的量值均小于或等于工作量值域范围的上限值,且大于或等于所述工作量值域范围中的下限值;或者仅有一个所述预设清洁区域的工作量的量值小于所述下限值,且工作量的量值小于所述下限值的所述预设清洁区域的清洁顺序在其他所述预设清洁区域之后;可以使得清洁机器人在根据所述预设清洁区域对房间进行清洁时可以起到较好的清洁效果和较高的清洁效率。The cleaning area division method of the cleaning robot provided by the embodiment of the present application includes: obtaining the graphical characteristics of the room, and the graphical characteristics include the boundaries of the room; obtaining the workload value range; and determining according to the workload value range and the graphics characteristics. The dividing line of the room, so that the dividing line and the boundary of the room form at least two preset cleaning areas, and the workload of each preset cleaning area is less than or equal to the upper limit of the workload value range, and is greater than or Equal to the lower limit value in the workload value range; or there is only one preset cleaning area whose workload value is less than the lower limit value, and the workload value is less than the lower limit value The cleaning sequence of the preset cleaning area is after the other preset cleaning areas; this allows the cleaning robot to achieve better cleaning effects and higher cleaning efficiency when cleaning the room according to the preset cleaning area. .
请结合上述实施例参阅图74,图74是本申请实施例提供的清洁机器人的控制方法的流程示意图。所述清洁机器人的控制方法可以应用在清洁系统中,用于对系统中的清洁机器人进行控制,以使清洁机器人执行清洁任务,例如对清洁任务地图对应的区域进行清洁等过程。Please refer to FIG. 74 in conjunction with the above embodiment. FIG. 74 is a schematic flowchart of the control method of the cleaning robot provided by the embodiment of the present application. The control method of the cleaning robot can be applied in a cleaning system to control the cleaning robot in the system so that the cleaning robot performs cleaning tasks, such as cleaning the area corresponding to the cleaning task map.
如图74所示,清洁机器人的控制方法包括步骤S210至步骤S220。As shown in Figure 74, the control method of the cleaning robot includes steps S210 to S220.
S210、根据前述的清洁区域划分方法,确定房间中形成的预设清洁区域;S210. According to the aforementioned cleaning area division method, determine the preset cleaning area formed in the room;
S220、控制所述清洁机器人根据所述预设清洁区域对所述房间进行清洁。S220. Control the cleaning robot to clean the room according to the preset cleaning area.
可选的,根据划分所述预设清洁区域的顺序,控制所述清洁机器人根据所述预设清洁区域对所述房间进行清洁。其中划分所述预设清洁区域的顺序,可以根据多个房间的清洁顺序确定。Optionally, according to the order in which the preset cleaning areas are divided, the cleaning robot is controlled to clean the room according to the preset cleaning areas. The order in which the preset cleaning areas are divided can be determined based on the cleaning order of multiple rooms.
示例性的,在清洁机器人清洁完任一所述预设清洁区域后,运动至基站进行维护,例如对清洁件,如拖擦件进行清洁,清理集尘盒中的脏污、充电、对清洁机器人的水箱补水或排水等中的至少一种。For example, after the cleaning robot completes cleaning any of the preset cleaning areas, it moves to the base station for maintenance, such as cleaning cleaning parts, such as mopping parts, cleaning dirt in the dust box, charging, and cleaning. At least one of replenishing or draining the water tank of the robot.
本申请实施例提供的控制方法的具体原理和实现方式均与前述实施例的方法类似,此处不再赘述。The specific principles and implementation methods of the control method provided by the embodiments of the present application are similar to the methods of the previous embodiments, and will not be described again here.
请结合上述实施例参阅图24,图24是本申请实施例提供的控制装置300的示意性框图。该控制装置300包括处理器301和存储器302。Please refer to FIG. 24 in conjunction with the above embodiment. FIG. 24 is a schematic block diagram of the
示例性的,所述处理器301用于运行存储在存储器302中的计算机程序,并在执行所述计算机程序时实现如下步骤:Exemplarily, the
获取房间的图形学特征,所述图形学特征包括所述房间的边界;Obtain graphical features of the room, where the graphical features include the boundaries of the room;
获取工作量值域范围;Get the workload value range;
根据所述工作量值域范围和所述图形学特征,确定所述房间的分割线,以使所述分割线和所述房间的边界形成至少两个预设清洁区域,各所述预设清洁区域的工作量的量值均小于或等于所述工作量值域范围的上限值,且大于或等于所述工作量值域范围中的下限值;或者仅有一个所述预设清洁区域的工作量的量值小于所述下限值,且工作量的量值小于所述下限值的所述预设清洁区域的清洁顺序在其他所述预设清洁区域之后。According to the workload value range and the graphical characteristics, the dividing line of the room is determined so that the dividing line and the boundary of the room form at least two preset cleaning areas, each of the preset cleaning areas The magnitude of the workload in the area is less than or equal to the upper limit of the workload value range, and greater than or equal to the lower limit of the workload value range; or there is only one preset cleaning area. The magnitude of the workload is less than the lower limit value, and the cleaning sequence of the preset cleaning area whose magnitude value of the workload is less than the lower limit value is after the other preset cleaning areas.
示例性的,所述处理器301用于运行存储在存储器302中的计算机程序,并在执行所述计算机程序时实现如下步骤:Exemplarily, the
根据前述的清洁区域划分方法,确定房间中形成的预设清洁区域;According to the aforementioned cleaning area division method, determine the preset cleaning area formed in the room;
控制所述清洁机器人根据所述预设清洁区域对所述房间进行清洁。The cleaning robot is controlled to clean the room according to the preset cleaning area.
本申请实施例提供的控制装置的具体原理和实现方式均与前述实施例的方法类似,此处不再赘述。The specific principles and implementation methods of the control device provided by the embodiments of the present application are similar to the methods of the previous embodiments, and will not be described again here.
在一些实施方式中,基站上的控制装置,如基站控制器,用于实现本申请实施例的方法的步骤;清洁机器人上的控制装置,如机器人控制器用于实现本申请实施例的方法的步骤;当然也不限于此,例如基站上的控制装置可以用于实现本申请实施例的方法的步骤。In some embodiments, the control device on the base station, such as the base station controller, is used to implement the steps of the method in the embodiment of the present application; the control device on the cleaning robot, such as the robot controller, is used to implement the steps of the method in the embodiment of the present application. ; Of course, it is not limited to this. For example, the control device on the base station can be used to implement the steps of the method in the embodiment of the present application.
可以理解的,本申请实施例还提供一种基站,该基站至少用于对清洁机器人进行维护,例如用于对清洁机器人的拖擦件进行清洁,所述基站还包括控制装置,如基站控制器,用于实现本申请实施例的方法的步骤。It can be understood that embodiments of the present application also provide a base station, which is at least used to maintain the cleaning robot, for example, to clean the mopping parts of the cleaning robot. The base station also includes a control device, such as a base station controller. , steps used to implement the method of the embodiment of the present application.
本申请实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时使所述处理器实现上述方法的步骤。Embodiments of the present application also provide a computer-readable storage medium. The computer-readable storage medium stores a computer program. When the computer program is executed by a processor, the processor can implement the steps of the above method.
其中,所述计算机可读存储介质可以是前述任一实施例所述的控制装置的内部存储单元,例如所述控制装置的硬盘或内存。所述计算机可读存储介质也可以是所述控制装置的外部存储设备,例如所述控制装置上配备的插接式硬盘,智能存储卡(Smart Media Card,SMC),安全数字(Secure Digital,SD)卡,闪存卡(Flash Card)等。The computer-readable storage medium may be an internal storage unit of the control device described in any of the preceding embodiments, such as a hard disk or memory of the control device. The computer-readable storage medium may also be an external storage device of the control device, such as a plug-in hard disk, a smart memory card (Smart Media Card, SMC), or a secure digital (SD) equipped on the control device. ) card, Flash Card, etc.
请结合上述实施例参阅图2,图2是本申请实施例提供的清洁系统的示意图。清洁系统包括:Please refer to Figure 2 in conjunction with the above embodiment. Figure 2 is a schematic diagram of a cleaning system provided by an embodiment of the present application. Cleaning system includes:
清洁机器人100,清洁机器人100包括行走单元106和清洁件10,行走单元106用于驱动清洁机器人100运动,以使清洁件10对地面进行拖擦;
基站200,基站200至少用于对清洁机器人100进行维护,例如对清洁机器人100的拖擦件进行清洁或更换;以及The
控制装置300。
本申请实施例提供的清洁系统的具体原理和实现方式均与前述实施例的方法类似,此处不再赘述。The specific principles and implementation methods of the cleaning system provided by the embodiments of the present application are similar to the methods of the previous embodiments, and will not be described again here.
伴随着物质生活水平和科学技术水平的不断提升,时下,越来越多的用户家庭都开始应用机器人来为人们提供相应服务,应用清洁机器人来替代人们亲自进行家庭环境或者大型场所的清扫,不仅能够减轻人们的劳作压力,更能够提升清扫效率。With the continuous improvement of material living standards and scientific and technological levels, nowadays, more and more user households are beginning to use robots to provide people with corresponding services. Cleaning robots are used to replace people's personal cleaning of home environments or large places. Not only It can reduce people's work pressure and improve cleaning efficiency.
目前,清洁机器人通常设置有专门的传感器装置以针对地面进行探测,例如,采用超声波检测地板的材质进而识别地面类型。然而,相关技术仅仅涉及到如何使用超声波针对地面介质进行检测确认,而当检测到地面介质为如地毯之类的特殊介质时,并未涉及如何针对特殊介质调整清洁机器人的应对模式。At present, cleaning robots are usually equipped with special sensor devices to detect the floor. For example, ultrasonic waves are used to detect the material of the floor and then identify the floor type. However, the related technology only involves how to use ultrasonic waves to detect and confirm the ground medium. When the ground medium is detected to be a special medium such as carpet, it does not involve how to adjust the response mode of the cleaning robot for the special medium.
本申请实施例提供一种地面介质探索方法、清洁机器人及存储介质。其中,该方法应用于清洁机器人,该清洁机器人可以为扫地机,还可以其他智能机器人,在此不做限制。Embodiments of the present application provide a ground medium exploration method, cleaning robot and storage medium. Among them, this method is applied to a cleaning robot, which can be a sweeper or other intelligent robot, and is not limited here.
下面结合附图,对本申请的一些实施方式作详细说明。在不冲突的情况下,下述的实施例及实施例中的特征可以相互组合。Some embodiments of the present application will be described in detail below with reference to the accompanying drawings. The following embodiments and features in the embodiments may be combined with each other without conflict.
请参照图75,图75为本申请实施例提供的一种地面介质探索方法的步骤流程示意图。Please refer to Figure 75, which is a schematic flow chart of a ground medium exploration method provided by an embodiment of the present application.
如图75所示,该地面介质探索方法包括步骤S10至步骤S11。As shown in Figure 75, the ground medium exploration method includes steps S10 to S11.
步骤S10、当所述清洁机器人检测到预设地面介质时,获取所述清洁机器人的状态信息,并根据所述状态信息确定沿边探索模式,其中,所述沿边探索模式包括内沿边探索模式以及外沿边探索模式;Step S10: When the cleaning robot detects the preset ground medium, obtain the status information of the cleaning robot, and determine the edge exploration mode according to the status information, wherein the edge exploration mode includes an inner edge exploration mode and an outer edge exploration mode. Edge exploration mode;
在一些实施方式中,预设地面介质包括地毯、脚垫、儿童爬爬垫以及铺设在地面上的凉席等,当然,预设地面介质还可以为其他清洁机器人遇到时需要进行特殊处理的铺设在地面上的介质,在此不做限制。In some embodiments, the preset floor media includes carpets, floor mats, children's climbing mats, and mats laid on the ground. Of course, the preset floor media can also be laid for other cleaning robots that require special treatment when encountering them. The medium on the ground is not limited here.
在一些实施方式中,外沿边探索模式指清洁机器人在预设地面介质外侧对预设地面介质进行沿边探索,所述清洁机器人在外侧进行沿边探索的过程中,清洁机器人的几何中心的正投影不落入预设地面介质的正投影,以此来控制外沿边探索过程中清洁机器人的活动范围以降低拖擦件打湿或弄脏预设地面介质区域的程度;内沿边探索模式指清洁机器人在预设地面介质内侧对预设地面介质进行沿边探索,清洁机器人在内侧进行沿边探索的过程中,清洁机器人的几何中心的正投影形成的轨迹至少有一部分与预设地面介质的正投影重合。In some embodiments, the outer edge exploration mode means that the cleaning robot performs edge exploration on the preset ground medium outside the preset ground medium. During the edge exploration process of the cleaning robot on the outside, the orthographic projection of the geometric center of the cleaning robot does not Falling into the orthographic projection of the preset ground medium, this is used to control the activity range of the cleaning robot during the outer edge exploration process to reduce the extent to which the mopping part wets or soils the preset ground medium area; the inner edge exploration mode means that the cleaning robot moves The preset ground medium is explored along the inside of the preset ground medium. During the edge exploration of the cleaning robot on the inside, at least part of the trajectory formed by the orthographic projection of the geometric center of the cleaning robot coincides with the orthographic projection of the preset ground medium.
在一些实施方式中,清洁机器人处于外沿边探索模式,在预设地面介质外侧进行沿边探索时,机器人的正投影与预设地面介质的正投影的重合部分小于机器人的正投影的百分之五十,以此降低拖擦件打湿或弄脏预设地面介质区域的程度;清洁机器人处于内沿边探索模式,在预设地面介质内侧进行沿边探索时,清洁机器人的正投影与预设地面介质的正投影的重合部分大于等于机器人的正投影的百分之五十。In some embodiments, the cleaning robot is in the outer edge exploration mode. When performing edge exploration outside the preset ground medium, the overlap between the orthographic projection of the robot and the orthographic projection of the preset ground medium is less than 5% of the orthographic projection of the robot. 10. This reduces the extent to which the mopping part wets or soils the preset floor media area; the cleaning robot is in the inner edge exploration mode, and when it performs edge exploration inside the preset floor media, the orthographic projection of the cleaning robot is consistent with the preset floor media. The overlapped portion of the orthographic projections is greater than or equal to 50% of the orthographic projection of the robot.
清洁机器人在移动或者在执行清洁任务的过程中,如果遇到预设地面介质而不进行特殊应对处理,可能会出现清洁机器人或者预设地面介质损坏的情况。示例性的,当预设地面介质为地毯时,清洁机器人在地毯上移动可能会被地毯卡死,而如果清洁机器人当前正在执行拖地任务,则清洁机器人在拖地过程中可能会弄湿地毯。If the cleaning robot encounters a preset floor medium while moving or performing a cleaning task without special handling, the cleaning robot or the preset floor medium may be damaged. For example, when the preset floor medium is a carpet, the cleaning robot may get stuck on the carpet when moving on the carpet. If the cleaning robot is currently performing a mopping task, the cleaning robot may wet the carpet during the mopping process. .
清洁机器人可以通过多种技术手段来检测是否遇到预设地面介质,以下以预设地面介质为地毯进行说明,在一些实施方式中,清洁机器人可以通过超声波传感器来检测地毯。The cleaning robot can use a variety of technical means to detect whether it encounters a preset floor medium. The following description takes the preset ground medium as a carpet. In some embodiments, the cleaning robot can detect the carpet through an ultrasonic sensor.
当清洁机器人在移动过程中检测到预设地面介质时,说明清洁机器人有可能已经到达或者接近预设地面介质的边缘了。此时,清洁机器人可以根据状态信息选取沿边探索模式来对预设地面介质进行探索。通过沿边探索确定预设地面介质的位置以及轮廓之后,清洁机器人在规划行进轨迹或者清洁轨迹时,即可根据预设地面介质的位置以及轮廓设计规避绕行路线或清洁地面介质行为。When the cleaning robot detects the preset floor medium during movement, it means that the cleaning robot may have reached or is close to the edge of the preset floor medium. At this time, the cleaning robot can select the edge exploration mode according to the status information to explore the preset ground medium. After determining the position and contour of the preset ground medium through edge exploration, the cleaning robot can avoid detours or clean the ground medium based on the position and contour of the preset ground medium when planning its travel trajectory or cleaning trajectory.
在一些实施方式中,所述方法还包括:In some embodiments, the method further includes:
当所述清洁机器人在移动过程中检测到预设地面介质时,如果在所述清洁机器人当前正处于构建清洁区域地图的状态,则不对所述预设地面介质进行沿边探索。When the cleaning robot detects the preset ground medium during movement, if the cleaning robot is currently in a state of constructing a cleaning area map, the preset ground medium will not be explored along the edge.
可以理解,清洁机器人1是根据清洁区域地图来确定移动路线以及清洁轨迹的,如果清洁机器人1是新购置的,在清洁机器人执行清洁任务之前,需要先对周边环境进行探索,以构建初始的清洁区域地图。为了提高建图效率,在这个过程中如果清洁机器人1检测到预设地面介质,不对该预设地面介质进行沿边探索。It can be understood that the cleaning
在一些实施方式中,所述方法还包括:In some embodiments, the method further includes:
当所述清洁机器人在移动过程中检测到预设地面介质时,如果在所述清洁机器人的清洁区域地图中记录有所述预设地面介质的轮廓信息,则不对所述预设地面介质进行沿边探索。When the cleaning robot detects the preset floor medium during movement, if the contour information of the preset floor medium is recorded in the cleaning area map of the cleaning robot, the preset floor medium will not be edged. explore.
可以理解,沿边探索过程必然需要耗费清洁机器人一定的时间资源,因此,如果在清洁机器人的清洁区域地图中已经记录有当前地面介质的轮廓信息,则清洁机器人在移动过程中检测到该预设地面介质时,无需对该预设地面介质再次进行沿边探索,其中,清洁区域地图为清洁机器人用于规划移动路径或者清洁路径的地图。It can be understood that the edge exploration process will inevitably consume a certain amount of time and resources for the cleaning robot. Therefore, if the contour information of the current ground medium has been recorded in the cleaning area map of the cleaning robot, the cleaning robot will detect the preset ground during the movement. When selecting a medium, there is no need to explore the preset ground medium along the edge again. The cleaning area map is a map used by the cleaning robot to plan a moving path or a cleaning path.
在一些实施方式中,所述方法还包括:In some embodiments, the method further includes:
当所述清洁区域地图中记录有所述预设地面介质的轮廓信息时,获取记录所述轮廓信息的记录时间,并计算所述记录时间与当前时间的时间间隔;When the contour information of the preset ground medium is recorded in the clean area map, obtain the recording time when the contour information is recorded, and calculate the time interval between the recording time and the current time;
当所述时间间隔大于预设时长时,控制所述清洁机器人对所述预设地面介质进行沿边探索,以根据所述探索结果更新所述预设地面介质在所述清洁区域地图中的轮廓信息。When the time interval is greater than the preset time length, the cleaning robot is controlled to explore the preset ground medium along the edge to update the outline information of the preset ground medium in the cleaning area map according to the exploration results. .
可以理解,清洁机器人的工作环境是动态的,通过本实施方式所提供的技术方案,可以定期更新清洁工作地图。It can be understood that the working environment of the cleaning robot is dynamic, and through the technical solution provided by this embodiment, the cleaning work map can be updated regularly.
在一些实施方式中,所述获取所述清洁机器人的状态信息,并根据所述状态信息确定沿边探索模式,包括:In some embodiments, obtaining status information of the cleaning robot and determining an edge exploration mode based on the status information includes:
获取所述清洁机器人的配置信息,并根据所述配置信息从所述内沿边探索模式以及所述外沿边探索模式中选取沿边探索模式;Obtain the configuration information of the cleaning robot, and select the edge exploration mode from the inner edge exploration mode and the outer edge exploration mode according to the configuration information;
或,获取所述清洁机器人周围的环境信息,并根据所述环境信息从所述内沿边探索模式以及所述外沿边探索模式中选取沿边探索模式。Or, obtain environmental information around the cleaning robot, and select an edge-edge exploration mode from the inner edge-edge exploration mode and the outer edge-edge exploration mode according to the environment information.
可以理解,清洁机器人的状态信息可以为配置信息,也可以为清洁机器人通过传感器(如激光雷达、悬崖传感器、视觉传感器等)获取到的周侧的(如障碍物、悬崖等特殊地形分布)的环境信息。It can be understood that the status information of the cleaning robot can be configuration information, or it can be the peripheral information (such as obstacles, cliffs and other special terrain distribution) obtained by the cleaning robot through sensors (such as lidar, cliff sensors, visual sensors, etc.) environmental information.
在一些实施方式中,当清洁机器人通过配置信息来确定沿边探索模式时,所述配置信息包括所述清洁机器人的工作模式和/或地面介质清洁功能状态。In some embodiments, when the cleaning robot determines the edge exploration mode through configuration information, the configuration information includes the working mode and/or the floor medium cleaning function state of the cleaning robot.
在一些实施方式中,当配置信息包括清洁机器人的工作模式以及地面介质清洁功能状态时,清洁机器人确定沿边探索模式的策略如下表一所示:当清洁机器人的工作模式为扫地模式时,确定沿边探索模式为内沿边探索模式;当清洁机器人的工作模式为拖地模式时,确定沿边探索模式为外沿边探索模式;当清洁机器人的工作模式为扫拖模式,且地面介质清洁功能为开启状态,确定沿边探索模式为内沿边探索模式;当清洁机器人的工作模式为扫拖模式,且地面介质清洁功能为关闭状态,确定沿边探索模式为外沿边探索模式。In some embodiments, when the configuration information includes the working mode of the cleaning robot and the floor medium cleaning function status, the cleaning robot determines the edge exploration mode strategy as shown in Table 1 below: When the cleaning robot's working mode is the sweeping mode, determine the edge exploration mode. The exploration mode is the inner edge exploration mode; when the cleaning robot's working mode is the mopping mode, determine the edge exploration mode to be the outer edge exploration mode; when the cleaning robot's working mode is the sweeping and mopping mode, and the floor media cleaning function is on, The edge-edge exploration mode is determined to be the inner edge-edge exploration mode; when the cleaning robot's working mode is the sweeping and mopping mode, and the ground media cleaning function is turned off, the edge-edge exploration mode is determined to be the outer edge exploration mode.
表一、Table I,
在一些实施方式中,当清洁机器人通过环境信息来确定沿边探索模式时,可以通过环境信息获取预设地面介质上的障碍物的分布情况,并根据预设地面介质上障碍物的数量以及分布位置来确定沿边探索模式,以此提升机器人的探索效率。示例性的,如果预设地面介质上的障碍物的数量大于预设数量时,则选取外沿边探索模式对预设地面介质进行探索;而如果预设地面介质上的障碍物的数量小于或等于预设数量时,则选取内沿边探索模式对预设地面介质进行探索;或者,如果预设地面介质上的障碍物的位置靠近预设地面介质边缘从而影响清洁机器人的行进时,则选取外沿边探索模式对预设地面介质进行探索;而如果预设地面介质上的障碍物的位置远离预设地面介质边缘而不影响清洁机器人的行进时,则选取内沿边探索模式对预设地面介质进行探索。In some embodiments, when the cleaning robot determines the edge exploration mode through environmental information, it can obtain the distribution of obstacles on the preset ground medium through the environmental information, and determine the number and distribution positions of obstacles on the preset ground medium. To determine the edge exploration mode to improve the robot's exploration efficiency. For example, if the number of obstacles on the preset ground medium is greater than the preset number, the outer edge exploration mode is selected to explore the preset ground medium; and if the number of obstacles on the preset ground medium is less than or equal to When the number is preset, select the inner edge exploration mode to explore the preset ground medium; or, if the obstacles on the preset ground medium are close to the edge of the preset ground medium and thus affect the movement of the cleaning robot, select the outer edge The exploration mode is used to explore the preset ground medium; and if the position of the obstacle on the preset ground medium is far away from the edge of the preset ground medium and does not affect the movement of the cleaning robot, then the inner edge exploration mode is selected to explore the preset ground medium. .
步骤S11、根据所述沿边探索模式对所述预设地面介质进行沿边探索,以获取所述预设地面介质的轮廓。Step S11: Perform edge exploration on the preset ground medium according to the edge edge exploration mode to obtain the outline of the preset ground medium.
可以理解,当确定了沿边探索模式之后,即可根据沿边探索模式对预设地面介质进行外沿边探索或者内沿边探索,并在探索过程中确定预设地面介质的轮廓。It can be understood that after the edge exploration mode is determined, the outer edge exploration or the inner edge exploration of the preset ground medium can be performed according to the edge exploration mode, and the outline of the preset ground medium can be determined during the exploration process.
其中,与外沿边探索模式相比,清洁机器人采用内沿边探索模式对预设地面介质进行探索后所确定的预设地面介质的轮廓的完整性更高。例如,预设地面介质周围放置有障碍物, 清洁机器人采用外沿边探索模式对预设地面介质进行探索时,障碍物可能会阻碍清洁机器人的探索行为,从而无法获得完整的预设地面介质的轮廓。Among them, compared with the outer edge exploration mode, the integrity of the contour of the preset ground medium determined by the cleaning robot after using the inner edge exploration mode to explore the preset ground medium is higher. For example, if there are obstacles placed around the preset ground medium, and the cleaning robot uses the outer edge exploration mode to explore the preset ground medium, the obstacles may hinder the cleaning robot's exploration behavior, making it impossible to obtain the complete outline of the preset ground medium. .
另外,如果沿边探索模式为外沿边探索模式,清洁机器人在对预设地面介质的外沿边探索,可以降低拖擦件打湿或弄脏预设地面介质区域的程度。例如,清洁机器人处于拖地模式,如果清洁机器人在检测到预设地面介质时采用了内沿边探索模式,则会大面积打湿甚至污染预设地面介质。In addition, if the edge exploration mode is the outer edge exploration mode, the cleaning robot explores the outer edge of the preset floor medium, which can reduce the extent to which the mopping member wets or soils the preset floor medium area. For example, if the cleaning robot is in mopping mode, and if the cleaning robot adopts the inner edge exploration mode when detecting the preset ground medium, it will wet a large area or even contaminate the preset ground medium.
在一些实施方式中,所述轮廓指所述预设地面介质的边缘的轮廓点拟合而得到的预设地面介质的边界,或根据该边界向外膨胀预设尺寸而得到的边界。可以理解,清洁机器人的传感器的检测结果会存在一定程度的滞后,以检测到的轮廓点拟合而得到的边界向外膨胀预设尺寸得到的边界会更准确,更符合实际情况。In some embodiments, the contour refers to the boundary of the preset ground medium obtained by fitting the contour points of the edge of the preset ground medium, or the boundary obtained by expanding the preset size outward according to the boundary. It is understandable that there will be a certain degree of lag in the detection results of the cleaning robot's sensor. The boundary obtained by fitting the detected contour points and expanding outward to the preset size will be more accurate and more in line with the actual situation.
可以理解,根据预设地面介质的边缘的轮廓点,可以确定预设地面介质的轮廓,将预设地面介质的轮廓更新到清洁机器人的清洁区域地图以后,清洁机器人在后续在根据清洁区域地图规划路径时,可以根据预设地面介质的轮廓规划绕行路径或者预设地面介质清洁路径。It can be understood that according to the contour points of the edge of the preset ground medium, the outline of the preset ground medium can be determined. After the outline of the preset ground medium is updated to the cleaning area map of the cleaning robot, the cleaning robot will subsequently plan according to the cleaning area map. When selecting a path, you can plan a detour path or a preset ground media cleaning path based on the contour of the preset ground medium.
在一些实施方式中,当所述沿边探索模式为所述内沿边探索模式时,所述根据所述沿边探索模式对所述预设地面介质进行沿边探索,以获取所述预设地面介质的轮廓,包括:当所述清洁机器人检测到所述预设地面介质时,控制所述清洁机器人执行内沿边探索任务,以获取所述预设地面介质的轮廓点,直至所述清洁机器人再次到达第一轮廓点位置,所述第一轮廓点位置为所述清洁机器人获取到第一个所述轮廓点时清洁机器人的坐标,当清洁机器人的坐标与清洁机器人获取到第一个所述轮廓点时清洁机器人的坐标重合或距离预定距离时,可以确定清洁机器人再次到达第一轮廓点位置。在一些实施方式中,清洁机器人的坐标可以由检测地面介质的传感器的坐标确定。In some embodiments, when the edge-edge exploration mode is the inner edge-edge exploration mode, the edge-edge exploration is performed on the preset ground medium according to the edge-edge exploration mode to obtain the outline of the preset ground medium. , including: when the cleaning robot detects the preset ground medium, controlling the cleaning robot to perform an inner edge exploration task to obtain the contour points of the preset ground medium until the cleaning robot reaches the first Contour point position. The first contour point position is the coordinates of the cleaning robot when it obtains the first contour point. When the coordinates of the cleaning robot are equal to the coordinates of the cleaning robot when it obtains the first contour point, the cleaning robot obtains the first contour point. When the coordinates of the robot coincide with each other or are a predetermined distance away, it can be determined that the cleaning robot has reached the first contour point position again. In some embodiments, the coordinates of the cleaning robot may be determined by the coordinates of sensors detecting floor media.
请参照图77,图77为本申请实施例提供的一种清洁机器人对预设地面介质执行内沿边探索的场景示意图。Please refer to FIG. 77 , which is a schematic diagram of a scene in which a cleaning robot performs inner edge exploration on a preset ground medium according to an embodiment of the present application.
如图77所示,清洁机器人1在由非预设地面介质区域进入预设地面介质区域范围2的过程中,当所述清洁机器人检测到所述预设地面介质时,控制清洁机器人执行内沿边探索任务,以获取所述预设地面介质的轮廓点,直至清洁机器人再次到达第一轮廓点位置,第一轮廓点位置为所述清洁机器人获取到第一个所述轮廓点的位置。可以理解,清洁机器人再次到达第一轮廓点位置时,说明清洁机器人回到了检测到第一轮廓点的位置,对预设地面介质的探索路径已经形成闭环,即清洁机器人已经完成对预设地面介质的探索。可以理解,清洁机器人再次到达第一轮廓点位置,并不限定于清洁机器人一定要回到与第一轮廓点重合的位置,当清洁机器人与第一轮廓点的距离小于预设距离阀值时,也可判定清洁机器人再次到达第一轮廓点。As shown in Figure 77, in the process of the cleaning
在一些实施方式中,所述控制所述清洁机器人执行内沿边探索任务,以获取所述预设地面介质的轮廓点,包括:控制所述清洁机器人执行第一预定动作直至所述清洁机器人检测到非预设地面介质;控制所述清洁机器人沿第一方向旋转,当所述清洁机器人再次检测到所述预设地面介质时,获取所述清洁机器人当前的坐标并标记为所述轮廓点;控制所述清洁机器人以预定角速度和预定线速度行进,当所述清洁机器人再次检测到所述非预设地面介质时,重复执行所述控制所述清洁机器人沿第一方向旋转的步骤,以获取所述轮廓点。In some embodiments, controlling the cleaning robot to perform an inner edge exploration task to obtain contour points of the preset ground medium includes: controlling the cleaning robot to perform a first predetermined action until the cleaning robot detects Non-preset ground medium; control the cleaning robot to rotate in the first direction, and when the cleaning robot detects the preset ground medium again, obtain the current coordinates of the cleaning robot and mark them as the contour points; control The cleaning robot travels at a predetermined angular speed and a predetermined linear speed. When the cleaning robot detects the non-preset ground medium again, the step of controlling the cleaning robot to rotate in the first direction is repeatedly performed to obtain the required information. Describe the contour points.
如图77(a)所示,当沿边探索模式为内沿边探索模式,且清洁机器人1已位于预设地面介质2对应的介质区域内时,需要确认清洁机器人1当前位于靠近预设地面介质的边缘的位置,如此才能确定在清洁机器人1接下来的行为是有效的沿边探索行为,清洁机器人接下来检测到预设地面介质时的坐标靠近预设地面介质的边缘,只有在清洁机器人1靠近预设地面介质的边缘时,清洁机器人检测到预设地面介质时的坐标才能够被确定为预设地面介质的轮廓点,示例性的,可以控制清洁机器人执行第一预定动作直至清洁机器人检测到非预设地 面介质,此时能够确定当前清洁机器人的位置靠近预设地面介质的边缘,以保证接下来清洁机器人探索行为过程中检测到的点为轮廓点;如图77(b)所示,确定了当前清洁机器人的位置靠近预设地面介质的边缘时,控制清洁机器人沿第一方向旋转,如图77(c)当清洁机器人再次检测到预设地面介质时,可以确定当前清洁机器人的坐标可以标记为第一轮廓点,如图77(d)所示,然后控制清洁机器人以预定的角速度和预定线速度行进,以使清洁机器人按照弧线路径先远离再靠近预设地面介质的边缘,当清洁机器人再次检测到非预设地面介质时,表明清洁机器人再次靠近预设地面介质的边缘,依此类推,重复执行控制清洁机器人沿第一方向旋转的步骤(即图77(d)-图77(f))以确定清洁机器人位于预设地面介质上并位于靠近预设地面介质的边缘的位置(即清洁机器人检测预设地面介质的传感器位于预设地面介质正上方并位于靠近预设地面介质的边缘的位置),从而继续控制清洁机器人以预定的角速度和预定线速度行进,如此循环,以获取其他的轮廓点。其中,所述沿边探索模式为内沿边探索模式,清洁机器人可以选择沿边探索的方向,具体的,左沿或右沿,左沿指以清洁机器人行进方向为参考,清洁机器人的左侧靠近预设地面介质边缘执行内沿边探索任务,当探索方向为左沿时,第一方向为以清洁机器人为参考顺时针方向;当探索方向为右沿时,第一方向为以清洁机器人为参考逆时针方向。在一些实施方式中,在控制清洁机器人沿第一方向旋转确定清洁机器人位于预设地面介质上并位于靠近预设地面介质的边缘的位置后,还可以控制清洁机器人以预定的角速度和预定线速度行进,且角速度逐渐减小,只要能够使清洁机器人朝靠近预设地面介质的方向探索即可,在此不做限定。As shown in Figure 77(a), when the edge-edge exploration mode is the inner edge-edge exploration mode, and the
可以理解,控制清洁机器人以预定的角速度和预定线速度行进,且角速度逐渐减小,可以使得清洁机器人探索的范围可以以清洁机器人为中心呈螺旋形逐渐扩大,可以保证清洁机器人能够探索到非预设地面介质,即能够确保清洁机器人能够再次靠近预设地面介质内侧的边缘,从而顺利进行下一个探索动作继续对预设地面介质进行探索。It can be understood that controlling the cleaning robot to travel at a predetermined angular speed and a predetermined linear speed, and the angular speed gradually decreases, can enable the cleaning robot to gradually expand the exploration range in a spiral shape with the cleaning robot as the center, and ensure that the cleaning robot can explore unpredicted areas. Setting the ground medium ensures that the cleaning robot can approach the inner edge of the preset ground medium again, so as to smoothly carry out the next exploration action and continue to explore the preset ground medium.
在一些实施方式中,所述控制所述清洁机器人执行第一预定动作直至所述清洁机器人检测到非预设地面介质,包括:控制所述清洁机器人旋转,实时获取所述清洁机器人旋转的角度及所述清洁机器人对地面介质的检测结果,确定所述清洁机器人对地面介质的检测结果为检测到所述非预设地面介质且确定获取所述清洁机器人旋转的角度小于180°,控制所述清洁机器人停止旋转;确定所述清洁机器人旋转角度到达180°且所述清洁机器人未检测到所述非预设地面介质时,控制所述清洁机器人停止旋转,并控制所述清洁机器人沿当前方向直行,直至所述清洁机器人检测到所述非预设地面介质。In some embodiments, controlling the cleaning robot to perform a first predetermined action until the cleaning robot detects a non-preset floor medium includes: controlling the rotation of the cleaning robot, obtaining the angle of rotation of the cleaning robot in real time and The detection result of the cleaning robot on the ground medium is determined to be that the non-preset ground medium is detected and the angle of rotation of the cleaning robot is determined to be less than 180°, and the cleaning is controlled. The robot stops rotating; when it is determined that the rotation angle of the cleaning robot reaches 180° and the cleaning robot does not detect the non-preset ground medium, the cleaning robot is controlled to stop rotating, and the cleaning robot is controlled to go straight in the current direction, Until the cleaning robot detects the non-preset floor medium.
示例性的,因为传感器检测结果存在一定的滞后性,清洁机器人检测到预设地面介质时,清洁机器人的大部分可能已经位于预设地面介质上,如果沿边探索模式为内沿边探索模式,为了更快地使清洁机器人去到预设地面介质的边缘,可以控制清洁机器人旋转,快速判断清洁机器人当前的位置是否靠近预设地面介质的边缘,如图76(a)-(b)当清洁机器人检测到非预设地面介质且旋转角度小于180°时,可以确定清洁机器人当前的位置靠近预设地面介质的边缘,此时可以控制清洁机器人停止旋转;如图76(c)-(e)所示,如果清洁机器人旋转角度到达180°时仍未检测到非预设地面介质,则可以确定当前清洁机器人已经位于预设地面介质上,此时可以控制清洁机器人停止旋转,并控制清洁机器人沿当前方向直行,直至清洁机器人检测到非预设地面介质时,确定清洁机器人当前的位置靠近预设地面介质的边缘,可以控制清洁机器人停止行进,以进行接下来的内沿边探索行为。For example, because there is a certain hysteresis in the sensor detection results, when the cleaning robot detects the preset ground medium, most of the cleaning robot may already be on the preset ground medium. If the edge-edge exploration mode is the inner edge-edge exploration mode, in order to update Quickly make the cleaning robot go to the edge of the preset ground medium, you can control the rotation of the cleaning robot, and quickly determine whether the current position of the cleaning robot is close to the edge of the preset ground medium, as shown in Figure 76 (a)-(b) when the cleaning robot detects When reaching a non-preset ground medium and the rotation angle is less than 180°, it can be determined that the current position of the cleaning robot is close to the edge of the preset ground medium. At this time, the cleaning robot can be controlled to stop rotating; as shown in Figure 76(c)-(e) , if the non-preset ground medium is still not detected when the cleaning robot's rotation angle reaches 180°, it can be determined that the current cleaning robot is already on the preset ground medium. At this time, the cleaning robot can be controlled to stop rotating and control the cleaning robot to move in the current direction. Go straight until the cleaning robot detects a non-preset ground medium and determines that the current position of the cleaning robot is close to the edge of the preset ground medium. The cleaning robot can be controlled to stop traveling for the next inner edge exploration behavior.
可以理解,如图76所示,清洁机器人1在执行探索任务时,如果确定当前的沿边探索模式为内沿边探索模式,在检测到预设地面介质后,可以控制清洁机器人旋转,以快速判断清洁机器人当前的位置是否靠近预设地面介质的边缘,在清洁机器人旋转的过程中,当清洁机器人检测到非预设地面介质且旋转角度小于180°时,可以确定清洁机器人当前的位置靠近预设地面介质的边缘,此时可以控制清洁机器人停止旋转;如果清洁机器人旋转角度到达180°时仍未检测到非预设地面介质,则可以确定当前清洁机器人已经位于预设地面介质上, 此时可以控制清洁机器人停止旋转,并控制清洁机器人沿当前方向直行,直至清洁机器人检测到非预设地面介质时,确定清洁机器人当前的位置靠近预设地面介质的边缘,可以控制清洁机器人停止行进;在确定清洁机器人当前的位置靠近预设地面介质的边缘之后,控制清洁机器人1沿第一方向旋转直至清洁机器人检测到预设地面介质,获取清洁机器人当前的坐标并标记为第一轮廓点;然后控制清洁机器人以预定角速度和预定线速度行进,以使清洁机器人按照弧线路径逐渐靠近预设地面介质的边缘,当清洁机器人再次检测到非预设地面介质时,表明清洁机器人再次靠近预设地面介质的边缘,依此类推,重复执行控制清洁机器人沿第一方向旋转的步骤以确定清洁机器人位于预设地面介质上并位于靠近预设地面介质的边缘的位置(即清洁机器人检测预设地面介质的传感器位于预设地面介质正上方并位于靠近预设地面介质的边缘的位置),从而再继续控制清洁机器人以预定的角速度和预定线速度行进,如此循环,以获取其他的轮廓点,直至清洁机器人再次回到第一轮廓点的位置。It can be understood that, as shown in Figure 76, when the cleaning
在一些实施方式中,可以控制所述预定角速度逐渐减小,可以理解,清洁机器人以预定的角速度和预定线速度行进,且角速度逐渐减小,检测到所述预设地面介质的预设轨迹可以为螺旋轨迹,可以使得清洁机器人探索的范围可以以清洁机器人为中心呈螺旋形逐渐扩大,可以确保所述清洁机器人能够探索到预设地面介质信号,当角速度不变时,预设轨迹为圆弧轨迹,还可以根据情况需要设计为其他轨迹,在此不做限制。In some embodiments, the predetermined angular velocity can be controlled to gradually decrease. It can be understood that the cleaning robot travels at a predetermined angular velocity and a predetermined linear velocity, and the angular velocity gradually decreases. The preset trajectory of the preset ground medium can be detected. It is a spiral trajectory, which allows the cleaning robot to explore a range that gradually expands in a spiral shape with the cleaning robot as the center, ensuring that the cleaning robot can explore the preset ground medium signal. When the angular speed remains unchanged, the preset trajectory is an arc. The trajectory can also be designed as other trajectories according to the needs of the situation, and there is no restriction here.
在一些实施方式中,所述预定的角速度的方向由所述第一方向决定。具体的,所述第一方向为以清洁机器人为参照物顺时针方向时,所述预定的角速度的方向为垂直地面向外;所述第一方向为以清洁机器人为参照物逆时针方向时,所述预定的角速度的方向为垂直地面向内。In some embodiments, the direction of the predetermined angular velocity is determined by the first direction. Specifically, when the first direction is clockwise with the cleaning robot as a reference, the direction of the predetermined angular velocity is vertically outward; when the first direction is counterclockwise with the cleaning robot as a reference, The direction of the predetermined angular velocity is vertically inward.
在一些实施方式中,所述清洁机器人至少设置有刷扫件以及拖擦件的其中一者,其中,所述刷扫件包括边扫件和/或中扫件;In some embodiments, the cleaning robot is provided with at least one of a brushing element and a mopping element, wherein the brushing element includes a side sweeping element and/or a middle sweeping element;
所述控制所述清洁机器人进入所述预设地面介质对应的介质区域范围之前,所述方法还包括:Before controlling the cleaning robot to enter the media area range corresponding to the preset floor media, the method further includes:
当所述清洁机器人设置有所述边扫件时,控制所述边扫件进入收起状态;When the cleaning robot is equipped with the side scanning piece, control the side scanning piece to enter a stowed state;
当所述清洁机器人设置有所述中扫件时,控制所述中扫件进入离地状态;When the cleaning robot is equipped with the middle scanning piece, control the middle scanning piece to enter an off-the-ground state;
当所述清洁机器人设置有所述拖擦件时,控制所述拖擦件进入离地状态。When the cleaning robot is provided with the mopping member, the mopping member is controlled to enter an off-the-ground state.
请参照图78,图78为本申请实施例提供的一种清洁机器人的结构示意图。Please refer to Figure 78, which is a schematic structural diagram of a cleaning robot provided by an embodiment of the present application.
如图78所示,清洁机器人1设置有刷扫件以及拖擦件12,其中,刷扫件包括边扫件10和中扫件11,边扫件10用于刷扫清洁机器人的覆盖范围的前方两侧的垃圾,中扫件11用于刷扫清洁机器人的覆盖范围的中部区域的垃圾,而拖擦件12则用于对清洁机器人的覆盖范围进行拖擦。As shown in FIG. 78 , the cleaning
当预设地面介质为地毯,并且清洁机器人1需要进入地毯进行内沿边探索时,在清洁机器人1进入预设地面介质对应的介质区域范围之前,控制边扫件10进入收起状态,并让中扫件11进入离地状态,可以避免清洁机器人1在进入介质区域范围2的过程中,边扫件10以及中扫件11被地毯缠绕阻碍而导致清洁机器人1无法进入地毯;另外,清洁机器人1控制拖擦件12也进入离地状态,则可以避免清洁机器人1进入介质区域范围2之后拖擦件12弄湿地毯。When the preset floor medium is a carpet, and the
在一些实施方式中,所述清洁机器人还设置有风机件,所述风机件用于吸取垃圾,所述控制所述清洁机器人进入所述预设地面介质对应的介质区域范围之前,所述方法还包括:In some embodiments, the cleaning robot is also provided with a fan component, and the fan component is used to suck garbage. Before controlling the cleaning robot to enter the media area corresponding to the preset floor media, the method also includes include:
控制所述清洁机器人在预设时长内停止移动,并提高所述风机件的风机转速;Control the cleaning robot to stop moving within a preset time period and increase the fan speed of the fan unit;
在所述预设时长后,降低所述风机件的风机转速,并控制所述清洁机器人进入所述预设地面介质对应的介质区域范围。After the preset time period, the fan speed of the fan component is reduced, and the cleaning robot is controlled to enter the media area corresponding to the preset floor medium.
本申请人研究发现,当清洁机器人1控制中扫件11以及拖擦件12进入离地状态的过程中,粘附在中扫件11或者拖擦件12上的垃圾可能会掉落到地面上。此时,控制清洁机器 人在原地驻留预设时长,并且提高风机件的风机转速,可以让风机将从中扫件11或者拖擦件12上掉下来的垃圾吸走,避免造成二次污染。在预设时长后,即可降低风机件的风机转速并控制清洁机器人进入介质区域范围2。The applicant's research found that when the cleaning
在一些实施方式中,预设时长可以设置为5秒、10秒或者15秒,当然,预设时长还可以根据情况需要设置为其他时长,在此不做限制。In some implementations, the preset duration can be set to 5 seconds, 10 seconds, or 15 seconds. Of course, the preset duration can also be set to other durations according to the needs of the situation, and there is no limit here.
在一些实施方式中,所述控制所述清洁机器人进入所述预设地面介质对应的介质区域范围之后,所述方法还包括:控制所述中扫件进入贴地工作状态,并提高所述风机件的风机转速。In some embodiments, after controlling the cleaning robot to enter the media area corresponding to the preset floor media, the method further includes: controlling the middle scanning element to enter a ground-close working state, and increasing the fan speed. The fan speed of the piece.
如此,在清洁机器人1进入介质区域范围2之后,控制中扫件11进入贴地工作状态,则清洁机器人1在移动过程中,中扫件11可以对预设地面介质进行清扫;而提高风机件的风机转速,可以让清洁机器人1对预设地面介质进行清扫时,清扫的更加干净。In this way, after the
在一些实施方式中,所述清洁机器人还设置有用于驱动所述清洁机器人的驱动件,所述控制所述清洁机器人进入所述预设地面介质对应的介质区域范围之后,所述方法还包括:In some embodiments, the cleaning robot is further provided with a driving member for driving the cleaning robot. After controlling the cleaning robot to enter the media area corresponding to the preset floor medium, the method further includes:
在一些实施方式中,所述清洁机器人还设置有用于驱动所述清洁机器人的驱动件,所述控制所述清洁机器人进入所述预设地面介质对应的介质区域范围之后,所述方法还包括:In some embodiments, the cleaning robot is further provided with a driving member for driving the cleaning robot. After controlling the cleaning robot to enter the media area corresponding to the preset floor medium, the method further includes:
记录所述驱动件出现打滑状况的打滑次数,并记录所述驱动件出现卡死状况的驱动卡死次数;Record the number of times the driving member slips and the number of times the driving member becomes stuck;
当所述打滑次数大于第一预设次数时,或,当所述驱动卡死次数大于第二预设次数,控制所述清洁机器人进行警告提醒。When the number of slips is greater than the first preset number, or when the number of drive jams is greater than the second preset number, the cleaning robot is controlled to issue a warning.
其中,驱动件用于驱动清洁机器人1执行前进、转向或者后退等移动操作。清洁机器人1在进入介质区域范围2后,开始监测驱动件是否发生打滑情况以及卡死情况,并记录驱动件发生打滑情况的次数作为打滑次数,且记录驱动件发生卡死情况的卡死次数作为驱动卡死次数。The driving member is used to drive the cleaning
可以理解,如果驱动件在介质区域范围2内出现卡死情况,可能会对清洁机器人1造成损坏;而如果驱动件在介质区域范围2内发生打滑,则会导致清洁机器人1难以移动。因此,当打滑次数大于第一预设次数,或者当清洁机器人1发现驱动卡死次数大于第二预设次数时进行警告提醒,以让察觉到警告提醒的用户帮助清洁机器人1脱离困境,避免损坏清洁机器人1.It can be understood that if the driving member gets stuck in the
在一些实施方式中,第一预设次数可以设置为2次、3次或者5次,第二预设次数可以设置为2次、3次或者5次,当然,第一预设次数与第二预设次数还可以根据情况需要设置为其他次数,在此不做限制。In some implementations, the first preset number of times can be set to 2, 3, or 5 times, and the second preset number of times can be set to 2, 3, or 5 times. Of course, the first preset number of times and the second preset number of times can be set to 2, 3, or 5 times. The preset number of times can also be set to other times according to the needs of the situation, and there is no limit here.
在一些实施方式中,所述控制所述清洁机器人进入所述预设地面介质对应的介质区域范围之后,所述方法还包括:In some embodiments, after controlling the cleaning robot to enter the media area corresponding to the preset floor media, the method further includes:
当所述清洁机器人设置有所述刷扫件时,监测所述边扫件是否触发电流阈值保护,并记录所述中扫件在出现卡死状况的中扫卡死次数;When the cleaning robot is equipped with the brush scanning part, monitor whether the side scanning part triggers current threshold protection, and record the number of times the middle scanning part gets stuck when the middle scanning part becomes stuck;
当监测到所述边扫件触发电流阈值保护时,控制所述边扫件进入自由状态;When it is detected that the edge scan component triggers the current threshold protection, control the edge scan component to enter a free state;
当所述中扫卡死次数大于第三预设次数,控制所述清洁机器人进行警告提醒。When the number of times the mid-scan is stuck is greater than the third preset number, the cleaning robot is controlled to issue a warning.
清洁机器人1在进入介质区域范围2后,开始监测边扫件是否触发电流阈值保护情况,并检测中扫件是否发生卡死情况,当中扫件发生卡死情况时,记录中扫件发生卡死情况的卡死次数作为中扫卡死次数。After the
可以理解,在控制清洁机器人1进入介质区域范围2之后,如果发现边扫件10有触发电流阈值保护的情况,说明预设地面介质对边扫件10的阻力较大,此时,控制边扫件10进入自由状态,则清洁机器人1不会继续控制边扫件10进行刷扫,而是让地面介质带动边扫件10进行自由运动。通过本实施方式所提供的技术方案,可以避免清洁机器人1后续在介质区域范围2内移动的过程中,因为地面介质阻力过大而损坏边扫件10。It can be understood that after controlling the
另外,如果中扫件11在介质区域范围2内出现卡死情况,可能会对清洁机器人1造成损坏。因此,当清洁机器人1发现中扫卡死次数大于第三预设次数时进行警告提醒,以让察觉到警告提醒的用户帮助清洁机器人1脱离困境,避免损坏清洁机器人1.In addition, if the
在一些实施方式中,第三预设次数可以设置为2次、3次或者5次,还可以根据情况需要设置为其他次数,在此不做限制。In some implementations, the third preset number of times can be set to 2 times, 3 times or 5 times, and can also be set to other times according to the needs of the situation, which is not limited here.
在一些实施方式中,清洁机器人1在进行警告提醒时,可能通过声音提醒、震动提醒、灯光提醒,或者通过手机等终端智能设备进行消息推送提送,另外,还可以根据情况需要采取其他提醒方式,在此不做限制。In some embodiments, when the
在一些实施方式中,所述根据所述沿边探索模式对所述预设地面介质进行沿边探索,以获取所述预设地面介质的轮廓,包括:当所述清洁机器人第一次检测到所述预设地面介质时,标记所述清洁机器人当前的位置为第一轮廓点位置;控制所述清洁机器人执行外沿边探索任务,以获取所述预设地面介质的轮廓点,直至所述清洁机器人再次到达所述第一轮廓点位置。可以理解,清洁机器人再次到达第一轮廓点位置时,说明清洁机器人回到了检测到第一轮廓点的位置,对预设地面介质的探索路径已经形成闭环,即清洁机器人已经完成对预设地面介质的探索。可以理解,清洁机器人再次到达第一轮廓点位置,并不限定于清洁机器人一定要回到与第一轮廓点重合的位置,当清洁机器人与第一轮廓点的距离小于预设距离阀值时,也可判定清洁机器人再次到达第一轮廓点。In some embodiments, the edge exploration of the preset ground medium according to the edge edge exploration mode to obtain the outline of the preset ground medium includes: when the cleaning robot detects the preset ground medium for the first time. When presetting the ground medium, mark the current position of the cleaning robot as the first contour point position; control the cleaning robot to perform an outer edge exploration task to obtain the contour points of the preset ground medium until the cleaning robot returns again The first contour point position is reached. It can be understood that when the cleaning robot reaches the first contour point again, it means that the cleaning robot has returned to the position where the first contour point was detected, and the exploration path for the preset ground medium has formed a closed loop, that is, the cleaning robot has completed the preset ground medium. exploration. It can be understood that when the cleaning robot reaches the first contour point again, it is not limited to the cleaning robot having to return to a position coinciding with the first contour point. When the distance between the cleaning robot and the first contour point is less than the preset distance threshold, It can also be determined that the cleaning robot has reached the first contour point again.
在一些实施方式中,所述控制所述清洁机器人执行外沿边探索任务,以获取所述预设地面介质的轮廓点,包括:控制所述清洁机器人执行第二预定动作,其中,当所述清洁机器人完成所述第二预定动作时,所述清洁机器人检测到的地面介质为非预设地面介质;控制所述清洁机器人以预定角速度和预定线速度行进,当所述清洁机器人再次检测到所述预设地面介质时,获取所述清洁机器人当前的坐标并标记为所述轮廓点;重复执行所述控制所述清洁机器人执行第二预定动作的步骤,以继续获取所述轮廓点。In some embodiments, controlling the cleaning robot to perform an outer edge exploration task to obtain contour points of the preset ground medium includes: controlling the cleaning robot to perform a second predetermined action, wherein when the cleaning When the robot completes the second predetermined action, the ground medium detected by the cleaning robot is a non-preset ground medium; the cleaning robot is controlled to travel at a predetermined angular speed and a predetermined linear speed. When the cleaning robot detects the ground medium again, When presetting the ground medium, obtain the current coordinates of the cleaning robot and mark them as the contour points; repeat the step of controlling the cleaning robot to perform the second predetermined action to continue to obtain the contour points.
示例性的,如图79所示,清洁机器人沿边探索模式为外沿边探索模式,如图79(a)-(b)所示,清洁机器人1首次检测到预设地面介质,记录清洁机器人1的当前位置为第一轮廓点,然后,控制清洁机器人执行第二预定动作,以保证清洁机器人位于预设地面介质之外,且清洁机器人当前的位置靠近预设地面介质的边缘,以保证清洁机器人1接下来的行为是有效的沿边探索行为,接下来清洁机器人执行探索行为的过程中检测到的点能够确定为轮廓点;确定当前清洁机器人位于预设地面介质之外且位于靠近预设地面介质的边缘的位置之后,控制清洁机器人以预定的角速度和预定线速度行进,以使清洁机器人按照曲线路径逐渐靠近预设地面介质的边缘,当清洁机器人再次检测到预设地面介质时,表明清洁机器人再次检测到了轮廓点,依此类推,重复执行控制清洁机器人执行第二预定动作的步骤以确定清洁机器人位于预设地面介质之外并位于靠近预设地面介质的边缘的位置(即清洁机器人检测预设地面介质的传感器位于预设地面介质之外并位于靠近预设地面介质的边缘的位置),从而继续控制清洁机器人以预定角速度和预定线速度行进,如此循环,以继续获取其他的轮廓点。在一些实施方式中,在确定当前清洁机器人位于预设地面介质之外且位于靠近预设地面介质的边缘的位置之后后,还可以控制清洁机器人以预定的角速度和预定线速度行进,且角速度逐渐减小,只要能够使清洁机器人朝靠近预设地面介质的方向探索即可,在此不做限定。可以理解,控制清洁机器人以预定角速度和预定线速度行进,且角速度逐渐减小,可以使得清洁机器人探索的范围可以以清洁机器人为中心呈螺旋形逐渐扩大,可以保证清洁机器人能够探索到预设地面介质,即能够确保清洁机器人能够再次检测预设地面介质的轮廓点,从而顺利进行下一个探索动作继续对预设地面介质进行探索。For example, as shown in Figure 79, the cleaning robot's edge exploration mode is the outer edge exploration mode. As shown in Figure 79(a)-(b), the
在一些实施方式中,所述第二预定动作为控制所述清洁机器人后退直至所述清洁机器人检测到所述非预设地面介质时,继续后退预定距离;或控制所述清洁机器人按预定方向旋转直至所述清洁机器人检测到所述非预设地面介质;或控制所述清洁机器人后退直至所述清 洁机器人检测到所述非预设地面介质时,继续后退预定距离后,再控制所述清洁机器人按预定方向旋转预定角度。In some embodiments, the second predetermined action is to control the cleaning robot to retreat until the cleaning robot detects the non-preset floor medium, and then continue to retreat a predetermined distance; or to control the cleaning robot to rotate in a predetermined direction. until the cleaning robot detects the non-preset floor medium; or controls the cleaning robot to retreat until the cleaning robot detects the non-preset floor medium, then continues to retreat a predetermined distance, and then controls the cleaning robot Rotate a predetermined angle in a predetermined direction.
示例性的,所述沿边探索模式为外沿边探索模式,清洁机器人可以选择沿边探索的方向,具体的,左沿或右沿,左沿指以清洁机器人行进方向为参考,清洁机器人的左侧靠近预设地面介质边缘执行外沿边探索任务,当探索方向为左沿时,所述第二预定动作中旋转预定角度的方向为顺时针旋转,清洁机器人的线速度方向的变化趋势为向逆时针方向变化(即清洁机器人的曲线形轨迹的延伸方向为逆时针),角速度方向为垂直清洁表面(即地面)向外;如图79(d)-(f)所示,当探索方向为右沿时,所述第二预定动作中旋转预定角度的方向为逆时针旋转,清洁机器的线速度方向的变化趋势为向顺时针方向变化(即清洁机器人的曲线形轨迹的延伸方向为顺时针),角速度方向为垂直机器人平面向外。Illustratively, the edge-along exploration mode is an outer edge-edge exploration mode. The cleaning robot can choose the direction of edge exploration. Specifically, the left edge or the right edge. The left edge refers to the direction of travel of the cleaning robot as a reference. The left side of the cleaning robot is close to It is preset that the edge of the ground medium performs the outer edge exploration task. When the exploration direction is the left edge, the direction of rotation of the predetermined angle in the second predetermined action is clockwise rotation, and the change trend of the linear speed direction of the cleaning robot is counterclockwise. change (that is, the extension direction of the cleaning robot's curved trajectory is counterclockwise), the angular velocity direction is vertical to the cleaning surface (i.e., the ground) outward; as shown in Figure 79(d)-(f), when the exploration direction is the right edge , the direction of the predetermined angle of rotation in the second predetermined action is counterclockwise rotation, the changing trend of the linear velocity direction of the cleaning machine is clockwise (that is, the extending direction of the curved trajectory of the cleaning robot is clockwise), and the angular velocity The direction is vertical to the robot plane and outward.
请参照图79,图79为本申请实施例提供的一种清洁机器人对预设地面介质执行外沿边探索的场景示意图。Please refer to FIG. 79 , which is a schematic diagram of a scene in which a cleaning robot performs outer edge exploration on a preset ground medium according to an embodiment of the present application.
如图79(a)-(b)所示,清洁机器人1首次检测到预设地面介质2,记录清洁机器人1的当前位置为第一轮廓点。如果预设地面介质的介质区域范围2的边缘上没有障碍物,则清洁机器人1绕着介质区域范围2的边沿移动可以回到第一轮廓点,或,当清洁机器人与第一轮廓点的距离小于预设距离阀值时,探索任务执行完成。As shown in Figure 79(a)-(b), the
清洁机器人1在探索到第一轮廓点后,可能有部分机体进入了介质区域范围2,控制清洁机器人1执行第二预定动作,当清洁机器人1完成第二预定动作时,清洁机器人位于预设地面介质的介质区域范围2之外,即清洁机器人1检测到非预设地面介质,然后控制清洁机器人1以预定的角速度和预定线速度行进,当清洁机器人1再次检测到预设地面介质时,获取清洁机器人1当前的坐标为轮廓点,重复执行第二预定动作及控制清洁机器人1以预定的角速度和预定线速度行进(重复图79(d)-(f)的步骤),以寻找预设地面介质的下一个轮廓点。当清洁机器人1再次到达第一轮廓点时,或,当清洁机器人与第一轮廓点的距离小于预设距离阀值时,探索任务执行完成。本实施例中,在执行外沿边探索模式时,第二预定动作可以是控制所述清洁机器人1后退直至所述清洁机器人检测到非预设地面介质时,继续后退预定距离;第二预定动作还可以是控制清洁机器人1按预定方向旋转直至清洁机器人1检测到所述非预设地面介质;如图79(d)-(e)所示,第二预定动作还可是控制清洁机器人1后退直至清洁机器人1检测到所述非预设地面介质时,继续后退预定距离后,再控制清洁机器人1按预定方向旋转预定角度;通过控制清洁机器人后退预设距离可以确保清洁机器人在执行以预定的角速度和预定线速度行进的过程中,清洁机器人的拖擦件处于所述预设地面介质的外侧,即避免清洁机器人在执行以预定的角速度和预定线速度行进的过程中拖擦件进入介质区域范围而弄湿或污染该预设地面介质,具体的,以圆形清洁机器人为例,后退预设距离与拖布的旋转覆盖范围的正投影超出清洁机器人边缘的最长距离相关;而按预定方向旋转预定角度,可以延长清洁机器人执行以预定的角速度和预定线速度行进的轨迹,即可以减小清洁机器人探索轮廓点的密度,从而可以提高外沿边探索的效率,缩短清洁机器人1完成外沿边探索的时间。在一些实施方式中,在确定当前清洁机器人位于预设地面介质之外且位于靠近预设地面介质的边缘的位置之后,还可以控制清洁机器人以预定的角速度和预定线速度行进,且角速度逐渐减小。After the
可以理解,控制清洁机器人以预定的角速度和预定线速度行进,且角速度逐渐减小,可以使得清洁机器人探索的范围可以以清洁机器人为中心呈螺旋形逐渐扩大,可以保证清洁机器人能够探索到非预设地面介质,即能够确保清洁机器人能够再次靠近预设地面介质内侧的边缘,从而顺利进行下一个探索动作继续对预设地面介质进行探索。It can be understood that controlling the cleaning robot to travel at a predetermined angular speed and a predetermined linear speed, and the angular speed gradually decreases, can enable the cleaning robot to gradually expand the exploration range in a spiral shape with the cleaning robot as the center, and ensure that the cleaning robot can explore unpredicted areas. Setting the ground medium ensures that the cleaning robot can approach the inner edge of the preset ground medium again, so as to smoothly carry out the next exploration action and continue to explore the preset ground medium.
可以理解,外沿边探索模式下,清洁机器人以预定的角速度和预定线速度行进,检测到所述预设地面介质的形成的轨迹可以为螺旋轨迹、圆弧轨迹,还可以根据情况需要设计为其他轨迹如折线轨迹,在此不做限制。It can be understood that in the outer edge exploration mode, the cleaning robot travels at a predetermined angular speed and a predetermined linear speed, and the trajectory formed by detecting the preset ground medium can be a spiral trajectory, an arc trajectory, or other designs according to the needs of the situation. The trajectory is such as a polyline trajectory and is not limited here.
在一些实施方式中,当所述沿边探索模式为所述外沿边探索模式时,所述根据所述沿边探索模式对所述预设地面介质进行沿边探索,以获取所述预设地面介质的轮廓,包括:当所述清洁机器人第一次检测到所述预设地面介质时,标记所述清洁机器人当前的位置为第一轮廓点位置;控制所述清洁机器人沿第二方向执行外沿边探索任务,以获取所述预设地面介质的轮廓点;In some embodiments, when the edge-edge exploration mode is the outer edge-edge exploration mode, edge-edge exploration is performed on the preset ground medium according to the edge-edge exploration mode to obtain the outline of the preset ground medium. , including: when the cleaning robot detects the preset ground medium for the first time, marking the current position of the cleaning robot as the first contour point position; controlling the cleaning robot to perform an outer edge exploration task in the second direction , to obtain the contour points of the preset ground medium;
当所述清洁机器人检测到障碍物时,控制所述清洁机器人执行第三预定动作,并控制所述清洁机器人沿第三方向执行所述外沿边探索任务,以获取所述预设地面介质的轮廓点,所述第三方向与所述第二方向相反;当所述清洁机器人再次检测到障碍物时,结束所述外沿边探索任务。When the cleaning robot detects an obstacle, the cleaning robot is controlled to perform a third predetermined action, and the cleaning robot is controlled to perform the outer edge exploration task in a third direction to obtain the outline of the preset ground medium. point, the third direction is opposite to the second direction; when the cleaning robot detects an obstacle again, the outer edge exploration task ends.
可以理解,清洁机器人第一次检测到所述预设地面介质时,标记所述清洁机器人当前的位置为第一轮廓点位置,开始选择左沿或右沿的方向执行外沿边探索任务,当清洁机器人通过激光雷达或碰撞传感器等检测到障碍物时,控制清洁机器人执行第三预定动作,并沿与第二方向相反的第三方向执行外沿边探索任务,具体获取轮廓点的过程与前述外沿边探索任务相同,此处不再赘述,当清洁机器人再次检测到障碍物时,结束外沿边探索任务。由此可知,清洁机器人执行外沿边探索任务受到障碍物的阻碍时,可以控制清洁机器人回到获取第一轮廓点的位置向相反的方向继续执行外沿边探索任务,如此,清洁机器人可以最大程度地对预设地面介质进行沿边探索。It can be understood that when the cleaning robot detects the preset ground medium for the first time, it marks the current position of the cleaning robot as the first contour point position, and begins to select the left or right edge direction to perform the outer edge exploration task. When cleaning When the robot detects an obstacle through lidar or a collision sensor, it controls the cleaning robot to perform a third predetermined action and perform an outer edge exploration task in a third direction opposite to the second direction. The specific process of obtaining contour points is the same as the aforementioned outer edge. The exploration tasks are the same and will not be repeated here. When the cleaning robot detects an obstacle again, the outer edge exploration task ends. It can be seen from this that when the cleaning robot is hindered by obstacles when performing the outer edge exploration task, the cleaning robot can be controlled to return to the position where the first contour point was obtained and continue to perform the outer edge exploration task in the opposite direction. In this way, the cleaning robot can maximize the Exploring along the edge of the preset ground medium.
在一些实施方式中,所述第三预定动作为原地掉头;或导航至所述第一轮廓点。可以理解,清洁机器人可以原地掉头,沿与第二方向相反的第三方向继续外沿边探索任务,或导航至第一轮廓点后再沿与第二方向相反的第三方向继续外沿边探索任务。可以理解,原地掉头直接继续外沿边探索任务会对原来已经探索过的部分预设地面介质进行重复探索,因此清洁机器人导航至第一轮廓点后再继续外沿边探索任务相对于原地掉头直接继续外沿边探索任务效率更高。In some implementations, the third predetermined action is to make a U-turn on the spot; or to navigate to the first contour point. It can be understood that the cleaning robot can turn around on the spot and continue the outer edge exploration task in the third direction opposite to the second direction, or navigate to the first contour point and then continue the outer edge exploration task in the third direction opposite to the second direction. . It can be understood that turning around in situ and directly continuing the outer edge exploration task will repeatedly explore part of the preset ground media that has been previously explored. Therefore, after the cleaning robot navigates to the first contour point and then continues the outer edge exploration task, it is better than turning around in situ and directly continuing the outer edge exploration task. Continuing to explore the outer edges is more efficient.
在一些实施方式中,所述预定角速度逐渐减小,可以理解,清洁机器人以预定的角速度和预定线速度行进,且角速度逐渐减小,检测到所述预设地面介质的预设轨迹可以为螺旋轨迹,可以使得清洁机器人探索的范围可以以清洁机器人为中心呈螺旋形逐渐扩大,可以确保所述清洁机器人能够探索到预设地面介质信号,当角速度不变时,预设轨迹为圆弧轨迹,还可以根据情况需要设计为其他轨迹,在此不做限制。In some embodiments, the predetermined angular velocity gradually decreases. It can be understood that the cleaning robot travels at a predetermined angular velocity and a predetermined linear velocity, and the angular velocity gradually decreases. It is detected that the preset trajectory of the preset ground medium may be a spiral. The trajectory can enable the cleaning robot to explore a range that gradually expands in a spiral shape with the cleaning robot as the center, ensuring that the cleaning robot can explore the preset ground medium signal. When the angular speed remains unchanged, the preset trajectory is an arc trajectory. Other trajectories can also be designed according to the needs of the situation, and there are no restrictions here.
请参照图80,图80为本申请实施例提供的一种清洁机器人对预设地面介质执行外沿边探索的又一场景示意图。Please refer to FIG. 80 , which is a schematic diagram of another scene in which a cleaning robot according to an embodiment of the present application performs outer edge exploration on a preset ground medium.
如图80所示,清洁机器人1以右沿方向对预设地面介质的介质区域范围2进行外沿边探索的过程中,位置20处为第一轮廓点,在位置21处第一次遇到了障碍物,此时,控制清洁机器人原地掉头沿与右沿方向相反的左沿方向继续外沿边探索任务,或,导航至第一轮廓点后再沿与右沿方向相反的左沿方向继续外沿边探索任务,在此不做限制。当清洁机器人1在位置22处第二次遇到障碍物时,沿边探索完成。在这个过程中,清洁机器人1所遇到的障碍物可以为同一个障碍物,也可以为不同的障碍物,在此不做限制。As shown in Figure 80, during the process of the cleaning
在一些实施方式中,所述获取所述预设地面介质的轮廓之后,所述方法还包括:In some embodiments, after obtaining the contour of the preset ground medium, the method further includes:
根据所述轮廓点信息确定所述预设地面介质的轮廓。The outline of the preset ground medium is determined based on the outline point information.
可以理解,预设地面介质的轮廓由获取到的各个预设地面介质的轮廓点确定,清洁机器人1获取到预设地面介质的轮廓点之后,即可对多个轮廓点进行拟合以得到预设地面介质的轮廓。It can be understood that the contour of the preset ground medium is determined by the obtained contour points of each preset ground medium. After the
在一些实施方式中,所述获取所述预设地面介质的轮廓之后,所述方法还包括:In some embodiments, after obtaining the contour of the preset ground medium, the method further includes:
当所述沿边探索模式为所述外沿边探索模式,且根据所述轮廓点无法确定所述预设地面介质的轮廓时,控制所述清洁机器人根据所述内沿边探索模式对所述预设地面介质进行沿边探索,以获取所述预设地面介质的轮廓。When the edge exploration mode is the outer edge exploration mode and the outline of the preset ground medium cannot be determined based on the contour points, the cleaning robot is controlled to clean the preset ground surface according to the inner edge exploration mode. The medium is explored along the edge to obtain the outline of the preset ground medium.
可以理解,例如,预设地面介质至少有一条边缘靠近房间墙壁,清洁机器人1以外沿边探索模式对预设地面介质进行探索时无法对靠近房间墙壁的一条边缘进行探索,则清洁机器人所检测到的轮廓点信息缺失过多,会出现无法确定预设地面介质的轮廓的情况。此时,结合内沿边探索的方式,可以提高预设地面介质的轮廓的完整性。It can be understood that, for example, at least one edge of the preset floor medium is close to the room wall, and the
请参照图81至图83,为本申请实施例提供的一种清洁机器人通过对轮廓点进行连接或拟合处理或图形匹配处理确定预设地面介质的轮廓的场景示意图。Please refer to FIGS. 81 to 83 , which are schematic diagrams of scenes in which a cleaning robot according to an embodiment of the present application determines the outline of a preset ground medium by connecting or fitting processing or graphic matching processing on contour points.
如图81所示,清洁机器人1在内沿边探索模式下对介质区域范围2进行内沿边探索后,确定了多个轮廓点,连接各个轮廓点,即得到了预设地面介质的轮廓。As shown in Figure 81, after cleaning
如图82所示,清洁机器人1在内沿边探索模式下对介质区域范围2进行内沿边探索后,确定了多个轮廓点,对各个轮廓点进行拟合处理,即得到了预设地面介质的比较平滑的轮廓。As shown in Figure 82, after the
请参照图83,图83为本申请实施例提供的一种对预设地面介质的轮廓进行图形匹配处理的场景示意图。Please refer to FIG. 83 , which is a schematic diagram of a scene for performing graphic matching processing on the outline of a preset ground medium according to an embodiment of the present application.
如图83所示,对各个轮廓点连接得到的边界轮廓进行图形匹配,得到一个呈矩形的预设地面介质的轮廓。As shown in Figure 83, graphic matching is performed on the boundary contours obtained by connecting each contour point, and a rectangular outline of the preset ground medium is obtained.
可以理解,预设地面介质通常为规则形状,在一些实施方式中,清洁机器人1在连接各个轮廓点后,得到第一图形,并通过计算包围第一图形的最小多边形与第一图形的匹配程度,来确定预设地面介质的轮廓。It can be understood that the preset ground medium is usually a regular shape. In some embodiments, the cleaning
示例性的,当清洁机器人1计算到包围第一图形的最小矩形与第一图形的匹配度为98%,而计算到包围第一图形的最小梯形与第一图像的匹配度为60%,则确定最小矩形为预设地面介质的轮廓。For example, when the cleaning
在一些实施方式中,所述根据所述轮廓点确定所述预设地面介质的轮廓之后,所述方法还包括:In some embodiments, after determining the outline of the preset ground medium according to the outline points, the method further includes:
根据所述预设地面介质的轮廓确定第一介质区域,并从预构建好的清洁区域地图中获取与所述第一介质区域距离最近的第二介质区域,其中,所述第一介质区域与所述第二介质区域对应的地面介质类型相同;The first media area is determined according to the outline of the preset ground medium, and the second media area closest to the first media area is obtained from the pre-constructed cleaning area map, wherein the first media area is The ground media types corresponding to the second media areas are the same;
当所述第一介质区域与所述第二介质区域之间的距离小于或等于预设间隔距离时,在所述清洁区域地图中合并所述第一介质区域与所述第二介质区域。When the distance between the first media area and the second media area is less than or equal to the preset separation distance, the first media area and the second media area are merged in the cleaning area map.
可以理解,清洁区域地图为清洁机器人1预构建好的、并且用于规划移动路径或者清洁路径的地图。根据预设地面介质的轮廓确定第一介质区域后,即可通过清洁区域地图判断是否存在与第一介质区域的地面介质类型相同的介质区域,如果存在与第一介质区域的地面介质类型相同的介质区域,则从中选取与第一介质区域距离最为接近的第二介质区域,两个介质区域之间的距离可以是两个区域的轮廓点之间的最短距离、最长距离等,此处不作限制。It can be understood that the cleaning area map is a map pre-constructed by the cleaning
其中,预设地面介质类型表征地面介质的类型,示例性的,如果第一介质区域的地面介质的类型为地毯类型,则第二介质区域对应的地面介质的类型也为地毯类型。The preset ground medium type represents the type of ground medium. For example, if the type of ground medium in the first media area is carpet type, then the type of ground medium corresponding to the second media area is also carpet type.
可以理解,第一介质区域与第二介质区域如果距离非常相近,则第一介质区域与第二介质区域极有可能归属于同一块预设地面介质。这种情况可能是因为该预设地面介质中放置有障碍物造成的。合并第一介质区域与第二介质区域之后,清洁机器人在后续更好的规划行进轨迹或任务,例如,本归属于同一预设地面介质的第一介质区域与第二介质区域,分别被识别合并后,清洁机器人将视为完整的一个介质区域,如果将该预设地面介质间隔开的障碍物被移除后,清洁机器人可以通过一次清洁规划完成对该预设地面介质的清洁,并且原先被障碍物占据的区域也会一同被清洁,无需分别对第一介质区域和第二介质区域规划清洁,不会出现原先被障碍物占据的区域被漏清洁的情况。It can be understood that if the distance between the first media area and the second media area is very close, the first media area and the second media area are very likely to belong to the same preset ground medium. This situation may be caused by obstacles placed in the preset ground medium. After merging the first media area and the second media area, the cleaning robot can better plan its travel trajectory or tasks in the future. For example, the first media area and the second media area that belong to the same preset ground medium are identified and merged respectively. Afterwards, the cleaning robot will be regarded as a complete media area. If the obstacles that separate the preset floor media are removed, the cleaning robot can complete the cleaning of the preset floor media through one cleaning plan, and the cleaning robot was originally The area occupied by obstacles will also be cleaned at the same time. There is no need to plan and clean the first media area and the second media area separately, and there will be no leakage of cleaning in the area originally occupied by obstacles.
请参照图84,图84为本申请实施例提供的一种清洁机器人合并相邻介质区域的场景示意图。Please refer to FIG. 84 , which is a schematic diagram of a scene in which a cleaning robot merges adjacent media areas according to an embodiment of the present application.
如图84所示,A为清洁机器人1根据预设地面介质的轮廓确定的第一介质区域,B为 从清洁区域地图中获取到的与第一介质区域A距离最接近的第二介质区域,当第一介质区域A与第二介质区域B之间的距离小于或等于预设间隔距离时,合并第一介质区域A以及第二介质区域B,得到介质区域C。As shown in Figure 84, A is the first media area determined by the cleaning
在一些实施方式中,预设间隔距离可以设置为20cm、30cm或者40cm,另外,预设间隔距离还可以根据情况需要设置为其他距离,在此不做限制。In some embodiments, the preset separation distance can be set to 20cm, 30cm or 40cm. In addition, the preset separation distance can also be set to other distances according to the needs of the situation, which is not limited here.
在一些实施方式中,所述根据所述轮廓点确定所述预设地面介质的轮廓之后,所述方法还包括:In some embodiments, after determining the outline of the preset ground medium according to the outline points, the method further includes:
根据所述预设地面介质的轮廓,控制所述清洁机器人通过所述边扫件和/或所述中扫件件以第一弓形路径对所述预设地面介质进行清洁;According to the profile of the preset floor medium, the cleaning robot is controlled to clean the preset floor medium through the side scanning element and/or the middle scanning element in a first arcuate path;
根据所述预设地面介质的轮廓,控制所述清洁机器人通过所述边扫件和/或所述中扫件以第二弓形路径对所述预设地面介质进行清洁,其中,所述第二弓形路径与所述第一弓形路径正交。According to the contour of the preset floor medium, the cleaning robot is controlled to clean the preset floor medium in a second arcuate path through the side scanning part and/or the middle scanning part, wherein the second The arcuate path is orthogonal to the first arcuate path.
可以理解,确定预设地面介质的轮廓后,即可根据预设地面介质的轮廓确定清洁路径。如图85所示,清洁机器人1在依据第一弓形路径以及第二弓形路径进行移动的过程中,通过边扫件10对预设地面介质进行清洁。It can be understood that after the outline of the preset ground medium is determined, the cleaning path can be determined according to the outline of the preset ground medium. As shown in FIG. 85 , while the
另外,第二弓形路径与第一弓形路径正交,则第二弓形路径与第一弓形路径构成井字形路径,因此,清洁机器人1的移动轨迹覆盖了预设地面介质的所有区域,可以避免少扫漏扫。通过本实施方式所提供的技术方案,可以提高清洁机器人1对预设地面介质的清洁效果。In addition, if the second arcuate path is orthogonal to the first arcuate path, then the second arcuate path and the first arcuate path form a tic-shaped path. Therefore, the moving trajectory of the cleaning
本申请中,当清洁机器人检测到预设地面介质时,获取清洁机器人的状态信息,并根据状态信息确定沿边探索模式,其中,沿边探索模式包括内沿边探索模式以及外沿边探索模式;根据沿边探索模式对预设地面介质进行沿边探索,以获取预设地面介质的轮廓。通过本申请所提供的技术方案,实现了在清洁机器人检测到地面介质为预设地面介质时,控制清洁机器人对预设地面介质进行探索。In this application, when the cleaning robot detects the preset ground medium, the status information of the cleaning robot is obtained, and the edge exploration mode is determined based on the status information. The edge exploration mode includes the inner edge exploration mode and the outer edge exploration mode; according to the edge exploration mode The mode explores the preset ground medium along the edge to obtain the outline of the preset ground medium. Through the technical solution provided by this application, when the cleaning robot detects that the ground medium is the preset ground medium, the cleaning robot is controlled to explore the preset ground medium.
相关技术的清洁机器人在对地面介质进行探索时,通常采用路径为折线或圆弧线的方式对预设地面介质进行探索,即控制清洁机器人旋转到预定方向并控制其直行直至清洁机器人检测到目标信号,之后再控制清洁机器人旋转到另一方向并控制清洁机器人远离检测到目标信号的位置,如此反复形成折线形探索路径;或者控制清洁机器人以恒定角速度和线速度进行直至清洁机器人检测到目标信号,之后再控制清洁机器人以恒定角速度和线速度远离检测到目标信号的位置,如此反复形成圆弧形探索路径;而不管是折线形路径探索方式还是圆弧形路径探索方式,探索范围都相对有限,无法兼顾探索的效率与完整性,如图86分别展示了采用折线、圆弧、螺旋轨迹对预设地面介质探索的轨迹。When cleaning robots in related technologies explore the ground medium, they usually use a path that is a polygonal line or an arc line to explore the preset ground medium, that is, the cleaning robot is controlled to rotate to a predetermined direction and to go straight until the cleaning robot detects the target. signal, and then control the cleaning robot to rotate in another direction and control the cleaning robot away from the position where the target signal is detected, so as to repeatedly form a zigzag exploration path; or control the cleaning robot to proceed at a constant angular speed and linear speed until the cleaning robot detects the target signal. , and then control the cleaning robot to move away from the location where the target signal is detected at a constant angular speed and linear speed, thus repeatedly forming an arc-shaped exploration path; regardless of whether it is a zigzag path exploration method or an arc-shaped path exploration method, the exploration range is relatively limited. , unable to take into account the efficiency and completeness of exploration. Figure 86 shows the trajectories of using polyline, arc, and spiral trajectories to explore the preset ground medium.
本申请实施例提供一种地面介质探索方法、清洁机器人及存储介质。其中,该方法应用于清洁机器人,该清洁机器人可以为扫地机,还可以其他智能机器人,在此不做限制。Embodiments of the present application provide a ground medium exploration method, cleaning robot and storage medium. Among them, this method is applied to a cleaning robot, which can be a sweeper or other intelligent robot, and is not limited here.
下面结合附图,对本申请的一些实施方式作详细说明。在不冲突的情况下,下述的实施例及实施例中的特征可以相互组合。Some embodiments of the present application will be described in detail below with reference to the accompanying drawings. The following embodiments and features in the embodiments may be combined with each other without conflict.
请参照图87,图87为本申请实施例提供的一种地面介质探索方法的步骤流程示意图。Please refer to FIG. 87 , which is a schematic flow chart of a ground medium exploration method provided by an embodiment of the present application.
如图87所示,该地面介质探索方法包括步骤S1至步骤S4。As shown in Figure 87, the ground medium exploration method includes steps S1 to S4.
步骤S1、确定起始位置,所述清洁机器人在所述起始位置时检测到目标地面介质;Step S1: Determine the starting position, and the cleaning robot detects the target ground medium at the starting position;
在一些实施方式中,清洁机器人在行进过程中通过传感器(如超声波传感器)检测到预设地面介质(如地毯、脚垫等需特殊处理的地面介质)及非预设地面介质,根据不同的探索动作,所述目标介质可以是预设地面介质或非预设地面介质,具体的,当采用外沿边探索动作,所述目标介质为预设地面介质;当采用内沿边探索动作,所述目标介质为非预设地面介质。当采用外沿边探索动作时,将清洁机器人第一次检测到预设地面介质时清洁机器人的位置作为起始位置。如果采用内沿边探索动作,可以将清洁机器人第一次检测到预设地面介质之后,再继续探索并检测到非预设地面介质时清洁机器人的位置作为起始位置。In some embodiments, the cleaning robot uses sensors (such as ultrasonic sensors) to detect preset floor media (such as carpets, floor mats, etc. that require special treatment) and non-preset floor media during travel. According to different exploration Action, the target medium can be a preset ground medium or a non-preset ground medium. Specifically, when the outer edge exploration action is adopted, the target medium is the preset ground medium; when the inner edge exploration action is adopted, the target medium It is a non-default ground medium. When the outer edge exploration action is used, the position of the cleaning robot when it first detects the preset ground medium is used as the starting position. If the inner edge exploration action is used, the position of the cleaning robot when it detects the preset ground medium for the first time and then continues to explore and detects non-preset ground medium can be used as the starting position.
步骤S2、控制所述清洁机器人执行预定动作;Step S2, control the cleaning robot to perform predetermined actions;
在所述清洁机器人执行步骤S1或S2的过程中,还包括:获取预设地面介质的轮廓点,并将第一次获取的预设地面介质的轮廓点为第一轮廓点,所述第一轮廓点位置为所述清洁机器人获取到第一个所述轮廓点时清洁机器人的坐标,当清洁机器人的坐标与清洁机器人获取到第一个所述轮廓点时清洁机器人的坐标重合或距离预定距离时,可以确定清洁机器人再次到达第一轮廓点位置。在一些实施方式中,清洁机器人的坐标可以由检测地面介质的传感器的坐标确定。其中,所述预设地面介质的轮廓点为所述清洁机器人执行步骤S1或S2的过程中检测到预设地面介质时清洁机器人的坐标。When the cleaning robot performs steps S1 or S2, it also includes: obtaining the contour points of the preset ground medium, and using the first obtained contour points of the preset ground medium as the first contour point, and the first The contour point position is the coordinates of the cleaning robot when the cleaning robot obtains the first contour point. When the coordinates of the cleaning robot coincide with or are a predetermined distance away from the coordinates of the cleaning robot when the cleaning robot obtains the first contour point. When, it can be determined that the cleaning robot reaches the first contour point position again. In some embodiments, the coordinates of the cleaning robot may be determined by the coordinates of sensors detecting floor media. Wherein, the contour point of the preset ground medium is the coordinate of the cleaning robot when it detects the preset ground medium when the cleaning robot performs step S1 or S2.
在一些实施方式中,所述清洁机器人确定所述起始位置后,执行预定动作,完成进行沿边探索动作的准备动作,不同的探索动作对应的预定动作不同。具体的,当所述清洁机器人采用外沿边探索动作,所述清洁机器人在执行所述步骤S1的过程中将第一次获取到的所述预设地面介质的轮廓点标记为第一轮廓点后,再执行所述步骤S2中的预定动作;当所述清洁机器人采取内沿边探索动作,由于需要确定预设地面介质边缘并调整机器人在开始探索动作的起始位姿,所述清洁机器人在执行所述步骤S2的过程中将执行预定动作过程中第一次获取到的所述预设地面介质的轮廓点标记为第一轮廓点。In some embodiments, after the cleaning robot determines the starting position, it performs a predetermined action and completes the preparatory action for performing an edge exploration action. Different exploration actions correspond to different predetermined actions. Specifically, when the cleaning robot adopts the outer edge exploration action, the cleaning robot marks the contour point of the preset ground medium acquired for the first time as the first contour point during the execution of step S1. , and then perform the predetermined action in step S2; when the cleaning robot takes the inner edge exploration action, since it is necessary to determine the preset ground medium edge and adjust the starting posture of the robot when starting the exploration action, the cleaning robot performs In the process of step S2, the contour point of the preset ground medium obtained for the first time during the execution of the predetermined action is marked as the first contour point.
步骤S3、控制所述清洁机器人以预定的角速度和预定线速度行进直至所述清洁机器人再次检测到目标信号,其中,所述角速度逐渐减小;Step S3: Control the cleaning robot to travel at a predetermined angular speed and a predetermined linear speed until the cleaning robot detects the target signal again, wherein the angular speed gradually decreases;
在一些实施方式中,所述清洁机器人以预定的角速度和预定线速度行进且角速度逐渐减小,直至所述清洁机器人再次检测到目标信号;根据不同的探索动作,所述目标信号可以是预设地面介质信号或非预设地面介质信号,具体的,当采用外沿边探索动作,所述目标信号为预设地面介质信号;当采用内沿边探索动作,所述目标信号为非预设地面介质信号。可以理解,控制清洁机器人以预定角速度和预定线速度行进,且控制角速度逐渐减小,可以使得清洁机器人探索的范围可以以清洁机器人为中心呈螺旋形逐渐扩大,可以保证清洁机器人能够探索到预设地面介质,即能够确保清洁机器人能够再次检测预设地面介质的轮廓点,从而顺利进行下一个探索动作继续对预设地面介质进行探索。In some embodiments, the cleaning robot travels at a predetermined angular speed and a predetermined linear speed and the angular speed gradually decreases until the cleaning robot detects a target signal again; according to different exploration actions, the target signal may be a preset Ground medium signal or non-preset ground medium signal. Specifically, when the outer edge exploration action is adopted, the target signal is the preset ground medium signal; when the inner edge exploration action is adopted, the target signal is the non-preset ground medium signal. . It can be understood that controlling the cleaning robot to travel at a predetermined angular speed and a predetermined linear speed, and controlling the angular speed to gradually decrease, can enable the cleaning robot to gradually expand the exploration range in a spiral shape with the cleaning robot as the center, ensuring that the cleaning robot can explore the preset The ground medium ensures that the cleaning robot can detect the contour points of the preset ground medium again, so as to smoothly carry out the next exploration action and continue to explore the preset ground medium.
步骤S4、重复执行步骤S2和S3;Step S4: Repeat steps S2 and S3;
在一些实施方式中,所述清洁机器人重复执行所述步骤S2和S3,如此循环,以获取预设地面介质的其他的轮廓点。In some embodiments, the cleaning robot repeatedly performs the steps S2 and S3 in this cycle to obtain other contour points of the preset ground medium.
在一些实施方式中,所述地面介质探索方法还包括:当确定所述清洁机器人再次到达第一轮廓点位置时,结束对所述预设地面介质的探索。所述清洁机器人执行所述步骤S1-S4后,获取了若干个预设地面介质的轮廓点,当所述清洁机器人检测再次到达第一轮廓点时,结束对所述预设地面介质的探索,可以理解,清洁机器人再次到达第一轮廓点位置时,说明清洁机器人回到了检测到第一轮廓点的位置,对预设地面介质的探索路径已经形成闭环,即清洁机器人已经完成对预设地面介质的探索。可以理解,清洁机器人再次到达第一轮廓点位置,并不限定于清洁机器人一定要回到与第一轮廓点重合的位置,当清洁机器人与第一轮廓点的距离小于预设距离阀值时,也可判定清洁机器人再次到达第一轮廓点。In some embodiments, the ground medium exploration method further includes: when it is determined that the cleaning robot reaches the first contour point position again, ending the exploration of the preset ground medium. After the cleaning robot performs the steps S1-S4, it acquires several contour points of the preset ground medium. When the cleaning robot detects that it reaches the first contour point again, it ends the exploration of the preset ground medium. It can be understood that when the cleaning robot reaches the first contour point again, it means that the cleaning robot has returned to the position where the first contour point was detected, and the exploration path for the preset ground medium has formed a closed loop, that is, the cleaning robot has completed the preset ground medium. exploration. It can be understood that when the cleaning robot reaches the first contour point again, it is not limited to the cleaning robot having to return to a position coinciding with the first contour point. When the distance between the cleaning robot and the first contour point is less than the preset distance threshold, It can also be determined that the cleaning robot has reached the first contour point again.
在一些实施方式中,所述地面介质探索方法还包括:所述目标地面介质为预设地面介质;所述步骤S2包括:控制所述清洁机器人后退直至所述清洁机器人检测到非预设地面介质时,继续后退预定距离;或控制所述清洁机器人按预定方向旋转预定角度直至所述清洁机器人检测到所述非预设地面介质;或控制所述清洁机器人后退直至所述清洁机器人检测到所述非预设地面介质时,继续后退预定距离后,再控制所述清洁机器人按预定方向旋转预定角度。In some embodiments, the ground medium exploration method further includes: the target ground medium is a preset ground medium; and the step S2 includes: controlling the cleaning robot to retreat until the cleaning robot detects a non-preset ground medium. when, continue to retreat a predetermined distance; or control the cleaning robot to rotate a predetermined angle in a predetermined direction until the cleaning robot detects the non-preset ground medium; or control the cleaning robot to retreat until the cleaning robot detects the When the ground medium is not preset, after continuing to retreat a predetermined distance, the cleaning robot is then controlled to rotate at a predetermined angle in a predetermined direction.
可以理解,当所述目标地面介质为预设地面介质,所述清洁机器人采用的是外沿边探索动作,步骤S2可以是控制所述清洁机器人后退直至所述清洁机器人检测到非预设地面介质时,继续后退预定距离;步骤S2还可以是控制清洁机器人按预定方向旋转直至清洁机器 人检测到所述非预设地面介质;如图79(d)-(e)所示,第二预定动作还可是控制清洁机器人后退直至清洁机器人检测到所述非预设地面介质时,继续后退预定距离后,再控制清洁机器人按预定方向旋转预定角度;通过控制清洁机器人后退预设距离,可以确保清洁机器人在执行以预定的角速度和预定线速度行进且角速度逐渐变小的过程中,清洁机器人的拖擦件处于所述预设地面介质的外侧,即避免清洁机器人在执行以预定的角速度和预定线速度行进且角速度逐渐变小的过程中,拖擦件进入介质区域范围而弄湿或污染该预设地面介质,具体的,以圆形清洁机器人为例,后退预设距离与拖布的旋转覆盖范围的正投影超出清洁机器人边缘的最长距离相关;而按预定方向旋转预定角度,可以延长清洁机器人执行以预定的角速度(角速度逐渐减小)和预定线速度行进的轨迹,即可以减小清洁机器人探索轮廓点的密度,从而可以提高外沿边探索的效率,缩短清洁机器人完成外沿边探索的时间。It can be understood that when the target ground medium is a preset ground medium and the cleaning robot adopts an outer edge exploration action, step S2 may be to control the cleaning robot to retreat until the cleaning robot detects a non-preset ground medium. , continue to retreat a predetermined distance; step S2 may also be to control the cleaning robot to rotate in a predetermined direction until the cleaning robot detects the non-preset ground medium; as shown in Figure 79(d)-(e), the second predetermined action may also be Control the cleaning robot to retreat until the cleaning robot detects the non-preset ground medium, then continue to retreat a predetermined distance, and then control the cleaning robot to rotate at a predetermined angle in a predetermined direction; by controlling the cleaning robot to retreat a preset distance, it can be ensured that the cleaning robot is executing While traveling at a predetermined angular velocity and a predetermined linear velocity and the angular velocity gradually becomes smaller, the mopping member of the cleaning robot is located outside the preset ground medium, that is, to prevent the cleaning robot from traveling at a predetermined angular velocity and a predetermined linear velocity. As the angular velocity gradually decreases, the mopping element enters the media area and wets or contaminates the preset floor medium. Specifically, taking the circular cleaning robot as an example, the preset distance is retreated and the orthographic projection of the rotation coverage of the mop It is related to the longest distance beyond the edge of the cleaning robot; and rotating a predetermined angle in a predetermined direction can extend the trajectory of the cleaning robot at a predetermined angular speed (the angular speed gradually decreases) and a predetermined linear speed, that is, it can reduce the cleaning robot's exploration of contour points. density, which can improve the efficiency of outer edge exploration and shorten the time for the cleaning robot to complete outer edge exploration.
在一些实施方式中,所述地面介质探索方法还包括:所述目标地面介质为预设地面介质,在所述清洁机器人执行步骤S2和S3的过程中,当所述清洁机器人检测到障碍物时,控制所述清洁机器人原地掉头或导航至所述第一轮廓点;当所述清洁机器人再次检测到障碍物时,结束对所述预设地面介质的探索。In some embodiments, the ground medium exploration method further includes: the target ground medium is a preset ground medium, and when the cleaning robot detects an obstacle while the cleaning robot performs steps S2 and S3, , controlling the cleaning robot to turn around or navigate to the first contour point; when the cleaning robot detects an obstacle again, it ends the exploration of the preset ground medium.
可以理解,当所述清洁机器人采用的是外沿边探索动作,所述目标地面介质为预设地面介质,可以理解,原地掉头直接继续外沿边探索任务会对原来已经探索过的部分预设地面介质进行重复探索,因此清洁机器人导航至第一轮廓点后再继续外沿边探索任务相对于原地掉头直接继续外沿边探索任务效率更高。It can be understood that when the cleaning robot adopts the outer edge exploration action, the target ground medium is the preset ground medium. It can be understood that turning around on the spot and directly continuing the outer edge exploration task will affect the previously explored part of the preset ground. The medium is repeatedly explored, so it is more efficient for the cleaning robot to navigate to the first contour point and then continue the outer edge exploration task than to turn around and directly continue the outer edge exploration task.
请参照图80,图80为本申请实施例提供的一种清洁机器人对预设地面介质执行外沿边探索的又一场景示意图。Please refer to FIG. 80 , which is a schematic diagram of another scene in which a cleaning robot according to an embodiment of the present application performs outer edge exploration on a preset ground medium.
如图80所示,清洁机器人1以右沿方向对预设地面介质的介质区域范围2进行外沿边探索的过程中,位置20处为第一轮廓点,在位置21处第一次遇到了障碍物,此时,控制清洁机器人原地掉头沿与右沿方向相反的左沿方向继续外沿边探索任务,或,导航至第一轮廓点20后再沿与右沿方向相反的左沿方向继续外沿边探索任务,在此不做限制。当清洁机器人1在位置22处第二次遇到障碍物时,沿边探索完成。在这个过程中,清洁机器人1所遇到的障碍物可以为同一个障碍物,也可以为不同的障碍物,在此不做限制。As shown in Figure 80, during the process of the cleaning
在一些实施方式中,所述地面介质探索方法还包括:所述目标地面介质为非预设地面介质;所述步骤S1包括:确定所述清洁机器人第一次检测到所述预设地面介质;控制所述清洁机器人旋转,实时获取所述清洁机器人旋转的角度及所述清洁机器人对地面介质的检测结果,确定所述清洁机器人对地面介质的检测结果为检测到所述非预设地面介质且确定获取所述清洁机器人旋转的角度小于180°,控制所述清洁机器人停止旋转;确定所述清洁机器人旋转角度到达180°且所述清洁机器人未检测到所述非预设地面介质时,控制所述清洁机器人停止旋转,并控制所述清洁机器人沿当前方向直行,直至所述清洁机器人检测到所述非预设地面介质,并将所述清洁机器人检测到所述非预设地面介质时的位置作为所述起始位置。In some embodiments, the ground medium exploration method further includes: the target ground medium is a non-preset ground medium; the step S1 includes: determining that the cleaning robot detects the preset ground medium for the first time; Control the rotation of the cleaning robot, obtain the rotation angle of the cleaning robot and the detection result of the ground medium by the cleaning robot in real time, and determine that the detection result of the ground medium by the cleaning robot is that the non-preset ground medium is detected and When it is determined that the rotation angle of the cleaning robot is less than 180°, the cleaning robot is controlled to stop rotating; when it is determined that the rotation angle of the cleaning robot reaches 180° and the cleaning robot does not detect the non-preset ground medium, the cleaning robot is controlled to stop rotating. The cleaning robot stops rotating, and controls the cleaning robot to move straight in the current direction until the cleaning robot detects the non-preset floor medium, and determines the position when the cleaning robot detects the non-preset floor medium. as the starting position.
可以理解,当清洁机器人采用的是内沿边探索动作,所述目标地面介质为非预设地面介质,可以理解,因为传感器检测结果存在一定的滞后性,清洁机器人第一次检测到预设地面介质时,清洁机器人的大部分可能已经位于预设地面介质上,如果沿边探索模式为内沿边探索模式,为了更快地使清洁机器人去到预设地面介质的边缘,可以控制清洁机器人旋转,快速判断清洁机器人当前的位置是否靠近预设地面介质的边缘,如图76(a)-(b)所示,当清洁机器人检测到非预设地面介质且旋转角度小于180°时,可以确定清洁机器人当前的位置靠近预设地面介质的边缘,此时可以控制清洁机器人停止旋转;如图76(c)-(e)所示,如果清洁机器人旋转角度到达180°时仍未检测到非预设地面介质,则可以确定当前清洁机器人已经位于预设地面介质上,此时可以控制清洁机器人停止旋转,并控制清洁机器人沿当前方向直行,直至清洁机器人检测到非预设地面介质时,确定清洁机器人当前的位置靠近预设地 面介质的边缘,可以控制清洁机器人停止行进,以进行接下来的内沿边探索行为。It can be understood that when the cleaning robot adopts the inner edge exploration action, the target ground medium is a non-preset ground medium. It can be understood that because there is a certain hysteresis in the sensor detection results, the cleaning robot detects the preset ground medium for the first time. At this time, most of the cleaning robot may have been located on the preset ground medium. If the edge exploration mode is the inner edge exploration mode, in order to make the cleaning robot go to the edge of the preset ground medium faster, the cleaning robot can be controlled to rotate and make quick judgments. Whether the current position of the cleaning robot is close to the edge of the preset ground medium, as shown in Figure 76(a)-(b), when the cleaning robot detects non-preset ground medium and the rotation angle is less than 180°, it can be determined that the current position of the cleaning robot is The position is close to the edge of the preset ground medium. At this time, the cleaning robot can be controlled to stop rotating; as shown in Figure 76(c)-(e), if the cleaning robot still does not detect the non-preset ground medium when the rotation angle reaches 180° , it can be determined that the current cleaning robot is already located on the preset ground medium. At this time, the cleaning robot can be controlled to stop rotating and control the cleaning robot to go straight in the current direction until the cleaning robot detects a non-preset ground medium. The current position of the cleaning robot can be determined. When the position is close to the edge of the preset ground medium, the cleaning robot can be controlled to stop traveling for the next inner edge exploration behavior.
在一些实施方式中,所述地面介质探索方法还包括:所述目标地面介质为非预设地面介质,所述步骤S2包括:控制所述清洁机器人沿第一方向旋转,直至所述清洁机器人检测到所述预设地面介质。In some embodiments, the ground medium exploration method further includes: the target ground medium is a non-preset ground medium, and the step S2 includes: controlling the cleaning robot to rotate in the first direction until the cleaning robot detects to the preset ground medium.
可以理解,当清洁机器人采用的是内沿边探索动作,所述目标地面介质为非预设地面介质,确定了当前清洁机器人的位置靠近预设地面介质的边缘时,即位于起始位置时,控制清洁机器人沿第一方向旋转,当清洁机器人再次检测到预设地面介质时,可以确定当前清洁机器人的坐标可以标记为第一轮廓点,可以理解,第一方向可以是以清洁机器人为参照物顺时针方向,也可以是以清洁机器人为参照物逆时针方向It can be understood that when the cleaning robot adopts an inner edge exploration action and the target ground medium is a non-preset ground medium, and it is determined that the current position of the cleaning robot is close to the edge of the preset ground medium, that is, when it is at the starting position, the control The cleaning robot rotates in the first direction. When the cleaning robot detects the preset ground medium again, it can be determined that the coordinates of the current cleaning robot can be marked as the first contour point. It can be understood that the first direction can be along the direction of the cleaning robot with the cleaning robot as a reference object. Clockwise direction, or counterclockwise direction using the cleaning robot as a reference
本申请实施例提供清洁机器人包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的计算机程序,其中所述计算机程序被所述处理器执行时,实现上述的地面介质探索方法的步骤。Embodiments of the present application provide a cleaning robot that includes a processor, a memory, and a computer program stored on the memory and executable by the processor. When the computer program is executed by the processor, the above-mentioned floor medium is implemented. Explore the steps of the method.
请参阅图88,图88为本申请实施例提供的一种清洁机器人的结构示意性框图。该清洁机器人包括但不限定于扫地机。Please refer to Figure 88. Figure 88 is a schematic structural block diagram of a cleaning robot provided by an embodiment of the present application. The cleaning robot includes but is not limited to a sweeping machine.
如图88所示,该清洁机器人1包括通过系统总线连接的处理器101、存储器和网络接口,其中,存储器可以包括存储介质102和内存储器105,存储介质102可以是非易失性的,也可以是易失性的。As shown in Figure 88, the cleaning
存储介质102可存储操作系统103和计算机程序104。该计算机程序104包括程序指令,该程序指令被执行时,可使得处理器101执行任意一种地面介质探索方法。
处理器101用于提供计算和控制能力,支撑整个清洁机器人的运行。The
内存储器105为存储介质102中的计算机程序104的运行提供环境,该计算机程序104被处理器101执行时,可使得处理器101执行任意一种地面介质探索方法。The
该网络接口用于进行网络通信,如发送或者获取分配的任务等。本领域技术人员可以理解,图83中示出的结构,仅仅是与本申请方案相关的部分结构的框图,并不构成对本申请方案所应用于其上的清洁机器人的限定,具体的清洁机器人可以包括比图中所示更多或更少的部件,或者组合某些部件,或者具有不同的部件布置。This network interface is used for network communication, such as sending or getting assigned tasks. Those skilled in the art can understand that the structure shown in Figure 83 is only a block diagram of part of the structure related to the solution of the present application, and does not constitute a limitation on the cleaning robot to which the solution of the present application is applied. The specific cleaning robot can May include more or fewer parts than shown, or combine certain parts, or have a different arrangement of parts.
应当理解的是,处理器101可以是中央处理单元(Central Processing Unit,CPU),该处理器101还可以是其他通用处理器、数字信号处理器(Digital Signal Processor,DSP)、专用集成电路(Application Specific Integrated Circuit,ASIC)、现场可编程门阵列(Field-Programmable Gate Array,FPGA)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。其中,通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等。It should be understood that the
其中,在一些实施方式中,所述处理器101用于运行存储在存储器中的计算机程序104,以实现如下步骤:Wherein, in some embodiments, the
当所述清洁机器人检测到预设地面介质时,获取所述清洁机器人的状态信息,并根据所述状态信息确定沿边探索模式,其中,所述沿边探索模式包括内沿边探索模式以及外沿边探索模式;When the cleaning robot detects the preset ground medium, the cleaning robot obtains the status information of the cleaning robot, and determines the edge exploration mode according to the status information, wherein the edge exploration mode includes an inner edge exploration mode and an outer edge exploration mode. ;
根据所述沿边探索模式对所述预设地面介质进行沿边探索,获取所述预设地面介质的轮廓。Perform edge exploration on the preset ground medium according to the edge exploration mode to obtain the outline of the preset ground medium.
在一些实施方式中,处理器101在获取所述清洁机器人的状态信息,并根据所述状态信息确定沿边探索模式时,用于实现:In some embodiments, when the
获取所述清洁机器人的配置信息,并根据所述配置信息从所述内沿边探索模式以及所述外沿边探索模式中选取沿边探索模式;Obtain the configuration information of the cleaning robot, and select the edge exploration mode from the inner edge exploration mode and the outer edge exploration mode according to the configuration information;
或,获取所述清洁机器人周围的环境信息,并根据所述环境信息从所述内沿边探索模式以及所述外沿边探索模式中选取沿边探索模式。Or, obtain environmental information around the cleaning robot, and select an edge-edge exploration mode from the inner edge-edge exploration mode and the outer edge-edge exploration mode according to the environment information.
在一些实施方式中,所述配置信息包括所述清洁机器人的工作模式和/或地面介质清洁功能状态。In some embodiments, the configuration information includes the working mode and/or the floor medium cleaning functional state of the cleaning robot.
在一些实施方式中,处理器101在根据所述沿边探索模式对所述预设地面介质进行沿边探索,以获取所述预设地面介质的轮廓时,用于实现:In some implementations, when the
当所述清洁机器人检测到所述预设地面介质时,控制所述清洁机器人执行内沿边探索任务,以获取所述预设地面介质的轮廓点,直至所述清洁机器人再次到达第一轮廓点位置,所述第一轮廓点位置为所述清洁机器人获取到第一个所述轮廓点的位置。When the cleaning robot detects the preset ground medium, the cleaning robot is controlled to perform an inner edge exploration task to obtain the contour points of the preset ground medium until the cleaning robot reaches the first contour point position again. , the first contour point position is the position where the cleaning robot obtains the first contour point.
在一些实施方式中,处理器101在控制所述清洁机器人执行内沿边探索任务,以获取所述预设地面介质的轮廓点时,用于实现:In some embodiments, when controlling the cleaning robot to perform an inner edge exploration task to obtain the contour points of the preset ground medium, the
控制所述清洁机器人执行第一预定动作直至所述清洁机器人检测到非预设地面介质;Control the cleaning robot to perform a first predetermined action until the cleaning robot detects a non-preset floor medium;
控制所述清洁机器人沿第一方向旋转,当所述清洁机器人再次检测到所述预设地面介质时,获取所述清洁机器人当前的坐标并标记为所述轮廓点;Control the cleaning robot to rotate in the first direction, and when the cleaning robot detects the preset ground medium again, obtain the current coordinates of the cleaning robot and mark them as the contour points;
控制所述清洁机器人以预定的角速度和预定线速度行进,当所述清洁机器人再次检测到所述非预设地面介质时,重复执行所述控制所述清洁机器人沿第一方向旋转的步骤,以获取所述轮廓点。Control the cleaning robot to travel at a predetermined angular speed and a predetermined linear speed. When the cleaning robot detects the non-preset ground medium again, repeat the step of controlling the cleaning robot to rotate in the first direction to Get the contour points.
在一些实施方式中,处理器101在控制所述清洁机器人执行第一预定动作直至所述清洁机器人检测到非预设地面介质时,用于实现:In some embodiments, when the
控制所述清洁机器人旋转,实时获取所述清洁机器人旋转的角度及所述清洁机器人对地面介质的检测结果,确定所述清洁机器人对地面介质的检测结果为检测到所述非预设地面介质且确定获取所述清洁机器人旋转的角度小于180°,控制所述清洁机器人停止旋转;确定所述清洁机器人旋转角度到达180°且所述清洁机器人未检测到所述非预设地面介质时,控制所述清洁机器人停止旋转,并控制所述清洁机器人沿当前方向直行,直至所述清洁机器人检测到所述非预设地面介质。Control the rotation of the cleaning robot, obtain the rotation angle of the cleaning robot and the detection result of the ground medium by the cleaning robot in real time, and determine that the detection result of the ground medium by the cleaning robot is that the non-preset ground medium is detected and When it is determined that the rotation angle of the cleaning robot is less than 180°, the cleaning robot is controlled to stop rotating; when it is determined that the rotation angle of the cleaning robot reaches 180° and the cleaning robot does not detect the non-preset ground medium, the cleaning robot is controlled to stop rotating. The cleaning robot stops rotating and controls the cleaning robot to move straight in the current direction until the cleaning robot detects the non-preset floor medium.
在一些实施方式中,所述角速度的方向根据所述第一方向确定。In some embodiments, the direction of the angular velocity is determined based on the first direction.
在一些实施方式中,所述角速度逐渐减小。In some embodiments, the angular velocity gradually decreases.
在一些实施方式中,所述清洁机器人至少设置有刷扫件以及拖擦件的其中一者,其中,所述刷扫件包括边扫件和/或中扫件;In some embodiments, the cleaning robot is provided with at least one of a brushing element and a mopping element, wherein the brushing element includes a side sweeping element and/or a middle sweeping element;
当确定所述清洁机器人检测到所述预设地面介质时,所述方法还包括以下至少一种操作:When it is determined that the cleaning robot detects the preset floor medium, the method further includes at least one of the following operations:
当所述清洁机器人设置有所述边扫件时,控制所述边扫件进入收起状态;When the cleaning robot is equipped with the side scanning piece, control the side scanning piece to enter a stowed state;
当所述清洁机器人设置有所述中扫件时,控制所述中扫件进入离地状态;When the cleaning robot is equipped with the middle scanning piece, control the middle scanning piece to enter an off-the-ground state;
当所述清洁机器人设置有所述拖擦件时,控制所述拖擦件进入离地状态。When the cleaning robot is provided with the mopping member, the mopping member is controlled to enter an off-the-ground state.
在一些实施方式中,处理器101在根据所述沿边探索模式对所述预设地面介质进行沿边探索,以获取所述预设地面介质的轮廓时,用于实现:In some embodiments, when the
当所述清洁机器人第一次检测到所述预设地面介质时,标记所述清洁机器人当前的位置为第一轮廓点位置;When the cleaning robot detects the preset floor medium for the first time, mark the current position of the cleaning robot as a first contour point position;
控制所述清洁机器人执行外沿边探索任务,以获取所述预设地面介质的轮廓点,直至所述清洁机器人再次到达所述第一轮廓点位置。The cleaning robot is controlled to perform an outer edge exploration task to obtain the contour points of the preset ground medium until the cleaning robot reaches the first contour point position again.
在一些实施方式中,处理器101在控制所述清洁机器人执行外沿边探索任务,以获取所述预设地面介质的轮廓点时,用于实现:In some embodiments, when controlling the cleaning robot to perform an outer edge exploration task to obtain the contour points of the preset ground medium, the
控制所述清洁机器人执行第二预定动作,当所述清洁机器人完成所述第二预定动作时,所述清洁机器人检测到非预设地面介质;Control the cleaning robot to perform a second predetermined action, and when the cleaning robot completes the second predetermined action, the cleaning robot detects a non-preset ground medium;
控制所述清洁机器人以预定的角速度和预定线速度行进,当所述清洁机器人再次检测到所述预设地面介质时,获取所述清洁机器人当前的坐标并标记为所述轮廓点;Control the cleaning robot to travel at a predetermined angular speed and a predetermined linear speed. When the cleaning robot detects the preset ground medium again, obtain the current coordinates of the cleaning robot and mark them as the contour points;
重复执行所述控制所述清洁机器人执行第二预定动作的步骤,以继续获取所述轮廓点Repeat the step of controlling the cleaning robot to perform a second predetermined action to continue to obtain the contour points
在一些实施方式中,所述第二预定动作为控制所述清洁机器人后退直至所述清洁机器人检测到所述非预设地面介质时,继续后退预定距离;或控制所述清洁机器人按预定方向旋转直至所述清洁机器人检测到所述非预设地面介质;或制所述清洁机器人后退直至所述清洁机器人检测到所述非预设地面介质时,继续后退预定距离后,再控制所述清洁机器人按预定方向旋转预定角度。In some embodiments, the second predetermined action is to control the cleaning robot to retreat until the cleaning robot detects the non-preset floor medium, and then continue to retreat a predetermined distance; or to control the cleaning robot to rotate in a predetermined direction. until the cleaning robot detects the non-preset floor medium; or the cleaning robot is controlled to retreat until the cleaning robot detects the non-preset floor medium, and then continues to retreat a predetermined distance before controlling the cleaning robot Rotate a predetermined angle in a predetermined direction.
在一些实施方式中,所述角速度逐渐减小In some embodiments, the angular velocity gradually decreases
在一些实施方式中,处理器101在根据所述沿边探索模式对所述预设地面介质进行沿边探索,以获取所述预设地面介质的轮廓时,用于实现:In some implementations, when the
当所述清洁机器人第一次检测到所述预设地面介质时,标记所述清洁机器人当前的位置为第一轮廓点位置;When the cleaning robot detects the preset floor medium for the first time, mark the current position of the cleaning robot as a first contour point position;
控制所述清洁机器人沿第二方向执行外沿边探索任务,以获取所述预设地面介质的轮廓点;Control the cleaning robot to perform an outer edge exploration task along the second direction to obtain the contour points of the preset ground medium;
当所述清洁机器人检测到障碍物时,控制所述清洁机器人执行第三预定动作,并控制所述清洁机器人沿第三方向执行所述外沿边探索任务,以获取所述预设地面介质的轮廓点,所述第三方向与所述第二方向相反;When the cleaning robot detects an obstacle, the cleaning robot is controlled to perform a third predetermined action, and the cleaning robot is controlled to perform the outer edge exploration task in a third direction to obtain the outline of the preset ground medium. point, the third direction is opposite to the second direction;
当所述清洁机器人再次检测到障碍物时,结束所述外沿边探索任务。When the cleaning robot detects an obstacle again, the outer edge exploration task ends.
在一些实施方式中,所述第三预定动作为原地掉头;或导航至所述第一轮廓点。In some implementations, the third predetermined action is to make a U-turn on the spot; or to navigate to the first contour point.
在一些实施方式中,处理器101在获取所述预设地面介质的轮廓时,用于实现:In some implementations, when acquiring the outline of the preset ground medium, the
通过对所述轮廓点进行连接或拟合处理或图形匹配处理确定所述预设地面介质的轮廓。The outline of the preset ground medium is determined by performing connection or fitting processing or graphic matching processing on the outline points.
在一些实施方式中,处理器101还用于实现:In some implementations, the
当所述清洁机器人执行外沿边探索任务,且根据所述轮廓点无法确定所述预设地面介质的轮廓时,控制所述清洁机器人根据所述内沿边探索模式对所述预设地面介质进行沿边探索,以获取所述预设地面介质的轮廓。When the cleaning robot performs an outer edge exploration task and the outline of the preset ground medium cannot be determined based on the contour points, the cleaning robot is controlled to perform an edge edge exploration of the preset ground medium according to the inner edge exploration mode. Explore to obtain the outline of the preset ground medium.
在一些实施方式中,所述根据所述轮廓点确定所述预设地面介质的轮廓之后,处理器101还用于实现:In some embodiments, after determining the outline of the preset ground medium according to the outline points, the
根据所述预设地面介质的轮廓确定第一介质区域,并从预构建好的清洁区域地图中获取与所述第一介质区域距离最近的第二介质区域,其中,所述第一介质区域与所述第二介质区域对应的地面介质类型相同;The first media area is determined according to the outline of the preset ground medium, and the second media area closest to the first media area is obtained from the pre-constructed cleaning area map, wherein the first media area is The ground media types corresponding to the second media areas are the same;
当所述第一介质区域与所述第二介质区域之间的距离小于或等于预设间隔距离时,在所述清洁区域地图中合并所述第一介质区域与所述第二介质区域。When the distance between the first media area and the second media area is less than or equal to the preset separation distance, the first media area and the second media area are merged in the cleaning area map.
在一些实施方式中,根据所述轮廓点信息确定所述预设地面介质的轮廓之后,处理器101还用于实现:In some embodiments, after determining the outline of the preset ground medium according to the outline point information, the
根据所述预设地面介质的轮廓,控制所述清洁机器人通过所述边扫件和/或所述中扫件以第一弓形路径对所述预设地面介质进行清洁;According to the contour of the preset floor medium, the cleaning robot is controlled to clean the preset floor medium through the side scanning element and/or the middle scanning element in a first arcuate path;
根据所述预设地面介质的轮廓,控制所述清洁机器人通过所述边扫件和/或所述中扫件以第二弓形路径对所述预设地面介质进行清洁,其中,所述第二弓形路径与所述第一弓形路径正交。According to the contour of the preset floor medium, the cleaning robot is controlled to clean the preset floor medium in a second arcuate path through the side scanning part and/or the middle scanning part, wherein the second The arcuate path is orthogonal to the first arcuate path.
在一些实施方式中,所述处理器101用于运行存储在存储器中的计算机程序104,以实现如下步骤:In some embodiments, the
步骤S1:确定起始位置,所述清洁机器人在所述起始位置时检测到目标地面介质;Step S1: Determine the starting position, and the cleaning robot detects the target ground medium at the starting position;
步骤S2:控制所述清洁机器人执行预定动作;Step S2: Control the cleaning robot to perform predetermined actions;
步骤S3:控制所述清洁机器人以预定的角速度和预定线速度行进直至所述清洁机器人再次检测到目标信号,其中,所述角速度逐渐减小;Step S3: Control the cleaning robot to travel at a predetermined angular speed and a predetermined linear speed until the cleaning robot detects the target signal again, wherein the angular speed gradually decreases;
步骤S4:重复执行步骤S2和S3;Step S4: Repeat steps S2 and S3;
在所述清洁机器人执行步骤S1或S2的过程中,还包括:获取预设地面介质的轮廓点,并将第一次获取的预设地面介质的轮廓点为第一轮廓点,其中,所述预设地面介质的轮廓点为所述清洁机器人执行步骤S1或S2的过程中检测到预设地面介质时的坐标。When the cleaning robot performs steps S1 or S2, it also includes: obtaining the contour points of the preset ground medium, and using the first obtained contour points of the preset ground medium as the first contour point, wherein, the The contour points of the preset ground medium are the coordinates when the cleaning robot detects the preset ground medium when performing step S1 or S2.
在一些实施方式中,所述处理器101还用于实现:In some implementations, the
当确定所述清洁机器人再次到达第一轮廓点位置时,结束对所述预设地面介质的探索。When it is determined that the cleaning robot reaches the first contour point position again, the exploration of the preset ground medium ends.
在一些实施方式中,所述目标地面介质为预设地面介质;所述处理器101在控制所述清洁机器人执行预定动作时,用于实现:In some embodiments, the target floor medium is a preset floor medium; when controlling the cleaning robot to perform a predetermined action, the
控制所述清洁机器人后退直至所述清洁机器人检测到非预设地面介质时,继续后退预定距离;或Control the cleaning robot to retreat until the cleaning robot detects a non-preset floor medium, and then continues to retreat a predetermined distance; or
控制所述清洁机器人按预定方向旋转预定角度;或Control the cleaning robot to rotate at a predetermined angle in a predetermined direction; or
控制所述清洁机器人后退直至所述清洁机器人检测到所述非预设地面介质时,继续后退预定距离后,再控制所述清洁机器人按预定方向旋转预定角度。The cleaning robot is controlled to retreat until the cleaning robot detects the non-preset floor medium, and then continues to retreat a predetermined distance, and then the cleaning robot is controlled to rotate in a predetermined direction at a predetermined angle.
在一些实施方式中,所述处理器101还用于实现:In some implementations, the
在所述清洁机器人执行步骤S2和S3的过程中,当所述清洁机器人检测到障碍物时,控制所述清洁机器人原地掉头或导航至所述第一轮廓点;During the process of the cleaning robot executing steps S2 and S3, when the cleaning robot detects an obstacle, the cleaning robot is controlled to turn around or navigate to the first contour point;
当所述清洁机器人再次检测到障碍物时,结束对所述预设地面介质的探索。When the cleaning robot detects an obstacle again, the exploration of the preset ground medium ends.
在一些实施方式中,所述目标地面介质为非预设地面介质;所述处理器101在确定起始位置,所述清洁机器人在所述起始位置时检测到目标地面介质时,用于实现:In some embodiments, the target floor medium is a non-preset floor medium; the
确定所述清洁机器人第一次检测到所述预设地面介质;Determine that the cleaning robot detects the preset floor medium for the first time;
控制所述清洁机器人旋转,实时获取所述清洁机器人旋转的角度及所述清洁机器人对地面介质的检测结果,确定所述清洁机器人对地面介质的检测结果为检测到所述非预设地面介质且确定获取所述清洁机器人旋转的角度小于180°,控制所述清洁机器人停止旋转;确定所述清洁机器人旋转角度到达180°且所述清洁机器人未检测到所述非预设地面介质时,控制所述清洁机器人停止旋转,并控制所述清洁机器人沿当前方向直行,直至所述清洁机器人检测到所述非预设地面介质,并将所述清洁机器人检测到所述非预设地面介质时的位置作为所述起始位置。Control the rotation of the cleaning robot, obtain the rotation angle of the cleaning robot and the detection result of the ground medium by the cleaning robot in real time, and determine that the detection result of the ground medium by the cleaning robot is that the non-preset ground medium is detected and When it is determined that the rotation angle of the cleaning robot is less than 180°, the cleaning robot is controlled to stop rotating; when it is determined that the rotation angle of the cleaning robot reaches 180° and the cleaning robot does not detect the non-preset ground medium, the cleaning robot is controlled to stop rotating. The cleaning robot stops rotating, and controls the cleaning robot to move straight in the current direction until the cleaning robot detects the non-preset floor medium, and determines the position when the cleaning robot detects the non-preset floor medium. as the starting position.
在一些实施方式中,所述处理器101在控制所述清洁机器人执行预定动作时,用于实现:In some embodiments, when controlling the cleaning robot to perform a predetermined action, the
控制所述清洁机器人沿第一方向旋转,直至所述清洁机器人检测到所述预设地面介质。The cleaning robot is controlled to rotate in a first direction until the cleaning robot detects the preset floor medium.
需要说明的是,所属领域的技术人员可以清楚地了解到,为了描述的方便和简洁,上述描述清洁机器人的具体工作过程,可以参考前述地面介质探索方法实施例中的对应过程,在此不再赘述。It should be noted that those skilled in the art can clearly understand that for the convenience and simplicity of description, the specific working process of the cleaning robot described above can be referred to the corresponding process in the aforementioned ground medium exploration method embodiment, and will not be described here. Repeat.
本申请实施例还提供一种存储介质,该存储介质为计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序中包括程序指令,所述程序指令被执行时所实现的方法可参照本申请地面介质探索方法的各个实施例。An embodiment of the present application also provides a storage medium. The storage medium is a computer-readable storage medium. The computer-readable storage medium stores a computer program. The computer program includes program instructions. When the program instructions are executed, For the implemented method, reference may be made to various embodiments of the ground medium exploration method of this application.
其中,所述计算机可读存储介质可以是前述实施例所述的清洁机器人的内部存储单元,例如所述清洁机器人的硬盘或内存。所述计算机可读存储介质也可以是所述清洁机器人的外部存储设备,例如所述清洁机器人上配备的插接式硬盘,智能存储卡(Smart Media Card,SMC),安全数字(Secure Digital,SD)卡,闪存卡(Flash Card)等。The computer-readable storage medium may be an internal storage unit of the cleaning robot described in the previous embodiment, such as a hard disk or memory of the cleaning robot. The computer-readable storage medium may also be an external storage device of the cleaning robot, such as a plug-in hard drive, a smart memory card (Smart Media Card, SMC), or a secure digital (SD) equipped on the cleaning robot. ) card, Flash Card, etc.
应当理解,在此本申请中所使用的术语仅仅是出于描述特定实施例的目的而并不意在限制本申请。It should be understood that the terminology used herein is for the purpose of describing particular embodiments only and is not intended to be limiting.
还应当理解,在本申请和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。It will also be understood that the term "and/or" as used in this application and the appended claims refers to and includes any and all possible combinations of one or more of the associated listed items.
以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到各种等效的修改或替换, 这些修改或替换都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应以权利要求的保护范围为准。The above are only specific embodiments of the present application, but the protection scope of the present application is not limited thereto. Any person familiar with the technical field can easily think of various equivalent methods within the technical scope disclosed in the present application. Modifications or replacements, these modifications or replacements should be covered by the protection scope of this application. Therefore, the protection scope of this application should be subject to the protection scope of the claims.
Claims (127)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/CN2022/109209WO2024021111A1 (en) | 2022-07-29 | 2022-07-29 | Cleaning robot control method, and processing, generation, area division and exploration method, device and system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/CN2022/109209WO2024021111A1 (en) | 2022-07-29 | 2022-07-29 | Cleaning robot control method, and processing, generation, area division and exploration method, device and system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024021111A1true WO2024021111A1 (en) | 2024-02-01 |
Family
ID=89705118
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/CN2022/109209CeasedWO2024021111A1 (en) | 2022-07-29 | 2022-07-29 | Cleaning robot control method, and processing, generation, area division and exploration method, device and system |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2024021111A1 (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN118370490A (en)* | 2024-06-24 | 2024-07-23 | 追觅创新科技(苏州)有限公司 | Cleaning method and cleaning system of cleaning robot |
| CN118466521A (en)* | 2024-07-11 | 2024-08-09 | 杭州涂鸦信息技术有限公司 | Robot walking method, device, electronic device and storage medium |
| CN119717656A (en)* | 2025-02-25 | 2025-03-28 | 中建科工集团绿色科技有限公司 | Navigation control method, device, equipment and medium for robot |
| CN120113960A (en)* | 2025-05-12 | 2025-06-10 | 追觅科技(苏州)有限公司 | Cleaning method of cleaning robot, cleaning robot and cleaning system |
| CN120595700A (en)* | 2025-08-08 | 2025-09-05 | 陕西欧迪亚实业有限公司 | Intelligent cleaning method and device based on machine learning |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010051423A1 (en)* | 2008-10-30 | 2010-05-06 | Intellibot Robotics Llc | Method of cleaning a surface using an automatic cleaning device |
| CN110236456A (en)* | 2019-01-08 | 2019-09-17 | 云鲸智能科技(东莞)有限公司 | Control method, device, equipment and storage medium for mopping robot |
| CN112741555A (en)* | 2019-10-31 | 2021-05-04 | 深圳拓邦股份有限公司 | Cleaning method, system and cleaning equipment |
| CN113208499A (en)* | 2021-05-26 | 2021-08-06 | 深圳市普森斯科技有限公司 | Cleaning apparatus, method of controlling the same, and computer-readable storage medium |
| CN113693495A (en)* | 2021-02-10 | 2021-11-26 | 北京石头世纪科技股份有限公司 | Cleaning method and device for automatic cleaning equipment, medium and electronic equipment |
| WO2022117107A1 (en)* | 2020-12-04 | 2022-06-09 | 苏州宝时得电动工具有限公司 | Cleaning robot, cleaning system, and cleaning method |
- 2022
- 2022-07-29WOPCT/CN2022/109209patent/WO2024021111A1/ennot_activeCeased
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010051423A1 (en)* | 2008-10-30 | 2010-05-06 | Intellibot Robotics Llc | Method of cleaning a surface using an automatic cleaning device |
| CN110236456A (en)* | 2019-01-08 | 2019-09-17 | 云鲸智能科技(东莞)有限公司 | Control method, device, equipment and storage medium for mopping robot |
| CN112741555A (en)* | 2019-10-31 | 2021-05-04 | 深圳拓邦股份有限公司 | Cleaning method, system and cleaning equipment |
| WO2022117107A1 (en)* | 2020-12-04 | 2022-06-09 | 苏州宝时得电动工具有限公司 | Cleaning robot, cleaning system, and cleaning method |
| CN113693495A (en)* | 2021-02-10 | 2021-11-26 | 北京石头世纪科技股份有限公司 | Cleaning method and device for automatic cleaning equipment, medium and electronic equipment |
| CN113208499A (en)* | 2021-05-26 | 2021-08-06 | 深圳市普森斯科技有限公司 | Cleaning apparatus, method of controlling the same, and computer-readable storage medium |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN118370490A (en)* | 2024-06-24 | 2024-07-23 | 追觅创新科技(苏州)有限公司 | Cleaning method and cleaning system of cleaning robot |
| CN118466521A (en)* | 2024-07-11 | 2024-08-09 | 杭州涂鸦信息技术有限公司 | Robot walking method, device, electronic device and storage medium |
| CN119717656A (en)* | 2025-02-25 | 2025-03-28 | 中建科工集团绿色科技有限公司 | Navigation control method, device, equipment and medium for robot |
| CN120113960A (en)* | 2025-05-12 | 2025-06-10 | 追觅科技(苏州)有限公司 | Cleaning method of cleaning robot, cleaning robot and cleaning system |
| CN120595700A (en)* | 2025-08-08 | 2025-09-05 | 陕西欧迪亚实业有限公司 | Intelligent cleaning method and device based on machine learning |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2024021111A1 (en) | Cleaning robot control method, and processing, generation, area division and exploration method, device and system | |
| TWI723631B (en) | Control method, device, equipment and storage medium for mopping robot | |
| US20220022718A1 (en) | Cleaning control method and apparatus, cleaning robot and storage medium | |
| CN112650205B (en) | Cleaning monitoring method, cleaning equipment, server and storage medium | |
| CN110236456A (en) | Control method, device, equipment and storage medium for mopping robot | |
| WO2024022360A1 (en) | Method, device, and system for controlling cleaning robot, and storage medium | |
| CN109392308A (en) | Scheduling and control system for autonomous clean robot | |
| CN115429155B (en) | Control method, device, system and storage medium of cleaning robot | |
| JP2023534989A (en) | Context and User Experience Based Robot Control | |
| CN113951774A (en) | Control method and device of cleaning equipment, cleaning equipment and readable storage medium | |
| WO2024022223A1 (en) | Method and apparatus for processing cleaning image of cleaning device, system, and storage medium | |
| CN113974506A (en) | Cleaning control method, cleaning control device, cleaning robot and storage medium | |
| EP4523590A1 (en) | Cleaning method, cleaning apparatus, cleaning device, and storage medium | |
| WO2021033512A1 (en) | Autonomous travel-type cleaner, method for controlling autonomous travel-type cleaner, and program | |
| CN118892291A (en) | Multi-area cleaning method, cleaning device, cleaning equipment and storage medium | |
| CN115633921A (en) | Cleaning area dividing method, control method, device and system of cleaning robot | |
| CN117414076A (en) | Control method, control device and storage medium of cleaning equipment | |
| CN116138663A (en) | Cleaning robot, control method, device and system thereof and storage medium | |
| CN113116238B (en) | Cleaning robot maintenance method, cleaning robot, cleaning system, and storage medium | |
| CN116300844A (en) | Intelligent control method and device for cleaning equipment | |
| CN115429169B (en) | Method, device, system and storage medium for generating visual interface | |
| US20250306604A1 (en) | Control method and device of robot vacuum cleaner, robot vacuum cleaner, system, and storage medium | |
| CN120419839A (en) | Cleaning method of cleaning equipment, cleaning equipment and computer storage medium | |
| CN115553664A (en) | Sweeper and sweeper control method | |
| CN119699935A (en) | Cleaning method, device, sweeping robot, readable storage medium and chip |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application | Ref document number:22952558 Country of ref document:EP Kind code of ref document:A1 | |
| NENP | Non-entry into the national phase | Ref country code:DE |