WO2023276130A1 - Control device, emotion transmission method, and program - Google Patents
Control device, emotion transmission method, and programDownload PDFInfo
- Publication number
- WO2023276130A1 WO2023276130A1PCT/JP2021/025049JP2021025049WWO2023276130A1WO 2023276130 A1WO2023276130 A1WO 2023276130A1JP 2021025049 WJP2021025049 WJP 2021025049WWO 2023276130 A1WO2023276130 A1WO 2023276130A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- emotion
- control device
- tactile sensation
- controls
- control unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images








Classifications
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F13/00—Interconnection of, or transfer of information or other signals between, memories, input/output devices or central processing units
Definitions
- the present inventionrelates to a control device, an emotion transmission method, and a program.
- Non-Patent Literature 1discloses a technique for transmitting data indicating the vibration of keystrokes to a communication partner in an online chat. This technology has been shown to have the effect of facilitating communication, as it makes it easier to sense the emotions of others, which is difficult to read online.
- the disclosed technologyaims to more accurately convey the emotions of the sending user to the receiving user.
- the disclosed technologyincludes an emotion estimation unit that estimates the emotion of a sending user based on text data, a tactile sensation determination unit that determines a tactile sensation corresponding to the estimated emotion, and a receiving user that feels the determined tactile sensation. and a control unit that controls to cause the control device.
- the sending user's emotionscan be conveyed to the receiving user more accurately.
- FIG. 1is a diagram illustrating a system configuration example of an emotion transfer system according to Example 1;
- FIG. FIG. 3is a diagram illustrating an example of arrangement of receiving terminals according to the first embodiment;
- 3is a diagram illustrating an example of functional configuration of a control device according to the first embodiment;
- FIG.It is a figure which shows an example of emotion / tactile sense related data.
- 6is a flow chart showing an example of the flow of control processing according to the first embodiment;
- FIG. 11is a diagram showing a system configuration example of an emotion transfer system according to Example 2;
- FIG. 10is a diagram illustrating an example of the functional configuration of a control device according to the second embodiment; It is a figure which shows an example of the tactile sense and rotation angle related data. It is a figure which shows the hardware configuration example of a computer.
- the control deviceestimates the emotion of the user operating the transmitting terminal based on the text data received by the receiving terminal from the transmitting terminal, and determines the tactile sensation corresponding to the estimated emotion. Then, the control device controls various devices so that the determined tactile sensation is felt by the user operating the receiving terminal.
- the emotion transfer system according to the present embodimentcontrols the vibration of the vibrator and the temperature of the thermoelectric element to allow the user operating the receiving terminal to feel the determined tactile sensation.
- FIG. 1is a diagram illustrating a system configuration example of an emotion transfer system according to a first embodiment.
- the emotion transmission system 1includes a control device 10, a receiving terminal 20, a transmitting terminal 30, a communication network 40, a first texture 210, a second texture 220, a first thermoelectric element 211, and a second thermoelectric element 221. , a first oscillator 212 , and a second oscillator 222 .
- the transmitting terminal 30 and the receiving terminal 20are communicably connected via a communication network 40 .
- the control device 10 and the receiving terminal 20are communicably connected via a communication line 41 .
- the control device 10, the first thermoelectric element 211, the second thermoelectric element 221, the first oscillator 212, and the second oscillator 222are connected via control lines 42 so as to be able to communicate with each other.
- the sending terminal 30is, for example, a terminal operated by a user who is a speaker in an online chat (hereinafter referred to as a sending user).
- the sending terminal 30sends data indicating the text entered by the sending user to the receiving terminal 20 .
- the receiving terminal 20is, for example, a terminal operated by a user who is a listener in an online chat (hereinafter referred to as a receiving user).
- the receiving terminal 20transmits the text data received from the transmitting terminal 30 to the control device 10 .
- the control device 10is, for example, a controller such as PC, and controls the first thermoelectric element 211, the second thermoelectric element 221, the first oscillator 212 and the second oscillator 222 based on the text data received from the receiving terminal 20. to control.
- the first texture 210 and the second texture 220are thin-film objects having surfaces made of materials that give different tactile sensations.
- the first texture 210is an object having a surface made of aluminum that feels "slippery”.
- the second texture 220is an object having a surface made of cotton that gives it a "fluffy" feel.
- the first texture 210is arranged close to the first thermoelectric element 211 and the first oscillator 212 , and the heat generated by the first thermoelectric element 211 increases the temperature and vibrates in conjunction with the first oscillator 212 .
- the second texture 220is also arranged close to the second thermoelectric element 221 and the second oscillator 222, the temperature rises due to the heat generated by the second thermoelectric element 221, and it vibrates in conjunction with the second oscillator 222. do.
- the first thermoelectric element 211 and the second thermoelectric element 221are, for example, Peltier elements, and generate heat under the control of the control device 10 respectively.
- the first oscillator 212 and the second oscillator 222are, for example, disk-shaped vibration motors, and each vibrate under the control of the control device 10 .
- FIG. 2is a diagram illustrating an example of an arrangement of receiving terminals according to the first embodiment.
- the receiving terminal 20has a keyboard 21 as shown in FIG. 2, for example.
- a first texture 210is pasted on the palm rest on the left side of the keyboard 21 .
- a second texture 220is attached to the palm rest on the right side of the keyboard 21 .
- thermoelectric element 211 and the first oscillator 212are attached to the back side of the first texture 210 .
- second thermoelectric element 221 and the second oscillator 222are attached to the back side of the second texture 220 .
- the receiving useris in a state of touching the first texture 210 and the second texture 220 when operating the keyboard 21 .
- the control device 10causes the first thermoelectric element 211 to generate heat and the first vibrator 212 to vibrate, the tactile sensation felt from the surface of the first texture 210 is emphasized, and a "smooth" tactile sensation is felt.
- the second thermoelectric element 221generates heat by the control device 10 and the second vibrator 222 vibrates, the tactile sensation felt from the surface of the second texture 220 is emphasized, giving a “fluffy” tactile sensation.
- FIG. 3is a diagram illustrating a functional configuration example of a control device according to the first embodiment.
- the control device 10includes a storage unit 11 , an emotion estimation unit 12 , a tactile sensation determination unit 13 , and a control unit 14 .
- the storage unit 11stores emotion/tactile sensation related data 100 .
- Emotion/tactile sensation related data 100is data that defines the relationship between emotion and tactile sensation. A specific example of the emotion/tactile sensation related data 100 will be described later.
- the emotion estimation unit 12estimates the emotion of the sending user based on the received text data.
- the emotion estimating unit 12may apply, for example, a technique such as Reference [1] as a method of estimating emotion. Specifically, the emotion estimation unit 12 calculates a score for each emotion expressed by the text, and estimates the emotion based on the calculated score.
- the emotion estimating unit 12assigns a maximum score of 1.0 for each emotion expressed by the text "I had a good breakfast this morning", and assigns a score of 0.68 for "joy” and 0.66 for "goodwill”. , "fear” 0.29, “sadness” 0.14, “anger” 0.34.
- the emotion estimation unit 12estimates the emotion of the sending user as, for example, the emotion with the maximum score ("joy” in the above example), and calculates the intensity of the emotion as the score of the emotion (0.68 in the above example).
- the tactile sensation determination unit 13determines the tactile sensation to be felt by the receiving user based on the estimated emotion. Specifically, the tactile sensation determination unit 13 determines a tactile sensation corresponding to the estimated emotion based on the emotion/tactile sensation related data 100 .
- the control unit 14controls the temperature and vibration based on the estimated emotional intensity and the determined tactile sensation.
- the controller 14includes a vibration controller 141 and a temperature controller 142 .
- the vibration control section 141controls the first oscillator 212 and the second oscillator 222 .
- the temperature control section 142controls the first thermoelectric element 211 and the second thermoelectric element 221 .
- the vibration control unit 141controls the first oscillator 212 so that the intensity of vibration corresponds to the intensity of the estimated emotion, and the determined tactile sensation is the first tactile sensation.
- the second oscillator 222is controlled so that the intensity of vibration corresponds to the intensity of the estimated emotion.
- the vibration control unit 141determines the vibration output according to the ratio of the intensity of emotion to the maximum value. For example, when the estimated emotion intensity is 0.68 with respect to the maximum value of 1.00, the first oscillator 212 or the second oscillator 222 is vibrated with an output of about 68% of the maximum value.
- the temperature control unit 142controls the first thermoelectric element 211 to generate heat.
- the thermoelectric element 221is controlled to generate heat.
- FIG. 4is a diagram showing an example of emotion/tactile sensation related data.
- Emotion/tactile sensation related data 100includes, as items, emotion, emotion type, and tactile sensation.
- the value of the item "emotion”is the emotion estimated by the emotion estimation unit 12 and is defined in advance.
- the value of the item "emotion type”is a value that indicates the type of each emotion, and is, for example, either "positive” or "negative".
- the value of the item "tactile sensation”is a value indicating the associated tactile sensation for each type of emotion, and is associated with the type of texture, for example, the first tactile sensation and the second tactile sensation.
- the emotion/tactile sensation related data 100 shown in FIG. 4is an example of data indicating the relationship between emotion and tactile sensation, and other data may be used.
- the emotion/tactile sensation related data 100may include three or more emotion types and tactile sensations.
- the emotion transfer system 1is configured to include three or more combinations of corresponding textures, thermoelectric elements, vibrators, and the like. That is, the temperature control unit 142 controls the temperature of the thermoelectric element that causes the receiving user to feel the determined tactile sensation among the plurality of thermoelectric elements. Further, the vibration control unit 141 controls the vibrator corresponding to the thermoelectric element that controls the temperature among the plurality of vibrators.
- the tactile sensationmay be “fluffy”, “smooth”, or the like. corresponding information is stored separately.
- the emotion/tactile sensation related data 100may be data such as the table shown in FIG. 6 of Reference [2].
- FIG. 5is a flowchart showing an example of the flow of control processing according to the first embodiment.
- the control device 10starts control processing periodically or upon receiving an instruction from the receiving terminal 20 .
- control device 10acquires text data by receiving it from the receiving terminal 20 (step S11).
- the emotion estimation unit 12estimates the emotion expressed by the text indicated in the acquired text data (step S12).
- the tactile sensation determination unit 13determines a tactile sensation corresponding to the estimated emotion (step S13).
- the control unit 14controls vibration and temperature (step S14). Specifically, the vibration control unit 141 controls the first oscillator 212 or the second oscillator 222 according to the estimated intensity of emotion. Also, the temperature control unit 142 controls the first thermoelectric element 211 or the second thermoelectric element 221 according to the determined tactile sensation.
- the control device 10estimates the emotion of the transmitting user based on the text data received by the receiving terminal 20 from the transmitting terminal 30, and generates a tactile sensation corresponding to the estimated emotion. to decide. Then, the control device 10 controls the vibration and temperature so that the receiving user feels the determined tactile sensation. This makes it possible for the receiving user to feel a tactile sensation corresponding to the estimation result of the sending user's emotion.
- Example 2A second embodiment will be described below with reference to the drawings.
- Example 2differs from Example 1 in that instead of controlling temperature and vibration, rotation and vibration are controlled. Therefore, in the following description of the second embodiment, the differences from the first embodiment will be mainly described. Reference numerals are assigned and descriptions thereof are omitted.
- the emotion transmission systemcontrols the vibration of the vibrator and the rotation angle of the rotator to allow the user operating the receiving terminal to feel the determined tactile sensation.
- FIG. 6is a diagram illustrating a system configuration example of an emotion transfer system according to the second embodiment.
- the emotion transfer system 1 according to this embodimentincludes a control device 10, a receiving terminal 20, a transmitting terminal 30, a communication network 40, a first texture 210, a second texture 220, a rotating body 230, and a motor 240. and a vibrating device 250 .
- the receiving terminal 20, the transmitting terminal 30, the communication network 40, the first texture 210 and the second texture 220are the same as in the first embodiment.
- the control device 10controls the motor 240 and the vibration device 250 based on the text data received from the receiving terminal 20.
- first texture 210 and the second texture 220are applied around the rotating body 230 .
- the body of rotation 230is, for example, a cylindrical object, and is arranged so that the first texture 210 and the second texture 220 pasted around it touch the receiving user.
- the rotor 230is rotated by the motor 240, and the first texture 210 or the second texture 220 touches the receiving user according to the rotation angle.
- the vibrating device 250is arranged to make the receiving user feel the vibration.
- the vibrating device 250may cause the receiving user to feel vibrations via the rotating body 230, or may be configured to directly touch the receiving user via another object.
- FIG. 7is a diagram illustrating a functional configuration example of a control device according to the second embodiment.
- the control device 10 according to the present embodimentincludes a rotation control section 143 instead of the temperature control section 142 of the control device 10 according to the first embodiment.
- the storage unit 11further stores tactile sensation/rotational angle related data 101 .
- the tactile sensation/rotation angle related data 101is data indicating the relationship between the tactile sensation and the rotation angle of the rotating body 230 . A specific example of the tactile sensation/rotational angle related data 101 will be described later.
- the vibration control unit 141controls the vibration device 250 so that the strength of the vibration corresponds to the estimated emotional strength.
- the rotation control unit 143determines, based on the tactile sensation/rotation angle related data 101, a rotation angle for causing the receiving user to feel the determined tactile sensation, and rotates the motor so that the rotating body 230 reaches the determined rotation angle. 240.
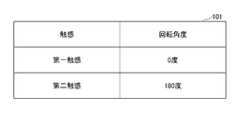
- FIG. 8is a diagram showing an example of tactile sensation/rotational angle related data.
- the tactile sensation/rotation angle related data 101includes tactile sensation and rotation angle as items.
- the value of the item "tactile sensation”is the same as the value of the item “tactile sensation” of the emotion/tactile sensation related data 100, and is associated with the texture type, for example, the first tactile sensation and the second tactile sensation.
- the value of the item "rotation angle”is the rotation angle of the rotating body 230 at which the first texture 210 or the second texture 220 touches the receiving user, and is set in advance.
- the control unit 14controls vibration and rotation angle instead of controlling vibration and temperature in step S14 of the control process shown in FIG. Specifically, the vibration control unit 141 controls the vibration device 250 so that the strength of vibration corresponds to the estimated strength of emotion.
- the rotation control unit 143determines, based on the tactile sensation/rotation angle related data 101, a rotation angle for causing the receiving user to feel the determined tactile sensation, and rotates the motor so that the rotating body 230 reaches the determined rotation angle. 240.
- the control device 10estimates the emotion of the transmitting user based on the text data received by the receiving terminal 20 from the transmitting terminal 30, and generates a tactile sensation corresponding to the estimated emotion. to decide. Then, the control device 10 controls the vibration and rotation angle so that the receiving user feels the determined tactile sensation. This makes it possible for the receiving user to feel a tactile sensation corresponding to the estimation result of the sending user's emotion.
- the control device 10can be implemented, for example, by causing a computer to execute a program describing the processing details described in the present embodiment.
- this "computer”may be a physical machine or a virtual machine on the cloud.
- the "hardware” described hereis virtual hardware.
- the above programcan be recorded on a computer-readable recording medium (portable memory, etc.), saved, or distributed. It is also possible to provide the above program through a network such as the Internet or e-mail.
- FIG. 9is a diagram showing a hardware configuration example of the computer.
- the computer of FIG. 9has a drive device 1000, an auxiliary storage device 1002, a memory device 1003, a CPU 1004, an interface device 1005, a display device 1006, an input device 1007, an output device 1008, etc., which are interconnected by a bus B, respectively.
- a program that implements the processing in the computeris provided by a recording medium 1001 such as a CD-ROM or memory card, for example.
- a recording medium 1001such as a CD-ROM or memory card
- the programis installed from the recording medium 1001 to the auxiliary storage device 1002 via the drive device 1000 .
- the programdoes not necessarily need to be installed from the recording medium 1001, and may be downloaded from another computer via the network.
- the auxiliary storage device 1002stores installed programs, as well as necessary files and data.
- the memory device 1003reads and stores the program from the auxiliary storage device 1002 when a program activation instruction is received.
- the CPU 1004implements functions related to the device according to programs stored in the memory device 1003 .
- the interface device 1005is used as an interface for connecting to the network.
- a display device 1006displays a program-based GUI (Graphical User Interface) or the like.
- An input device 1007is composed of a keyboard, a mouse, buttons, a touch panel, or the like, and is used to input various operational instructions.
- the output device 1008outputs the calculation result.
- the computermay include a GPU (Graphics Processing Unit) or TPU (Tensor Processing Unit) instead of the CPU 1004, or may include a GPU or TPU in addition to the CPU 1004. In that case, the processing may be divided and executed, for example, the GPU or TPU executes processing that requires special computation, and the CPU 1004 executes other processing.
- This specificationdescribes at least a control device, an emotion transmission method, and a program described in each of the following items.
- (Section 1)an emotion estimation unit that estimates the emotion of the sending user based on the text data; a tactile sense determination unit that determines a tactile sense corresponding to the estimated emotion; a control unit that controls the receiving user to feel the determined tactile sensation; Control device.
- (Section 2)The emotion estimation unit estimates the intensity of emotion of the sending user, The control unit performs control so that the receiving user feels vibration according to the estimated intensity of the emotion.
- (Section 3)The control unit controls the temperature of a thermoelectric element that causes the receiving user to feel the determined tactile sensation among the plurality of thermoelectric elements. 3.
- the control unitcontrols, among the plurality of vibrators, a vibrator corresponding to a thermoelectric element that controls temperature.
- a control device according to claim 3.The control unit controls the rotation angle of the rotating body so that the receiving user feels the determined tactile sensation. 3.
- a control device according to claim 2.An emotion transmission method executed by a control device, estimating the sending user's sentiment based on the text data; determining a tactile sensation corresponding to the estimated emotion; and controlling the receiving user to feel the determined tactile sensation. method of conveying emotions.
- (Section 7)A program for causing a computer to function as each unit in the control device according to any one of items 1 to 5.
- control device11 storage unit 12 emotion estimation unit 13 tactile sense determination unit 14 control unit 20 receiving terminal 30 transmitting terminal 40 communication network 41 communication line 42 control line 100 emotion/tactile sense related data 101 tactile sense/rotation angle related data 141 vibration control unit 142 Temperature control unit 143 Rotation control unit 210 First texture 211 First thermoelectric element 212 First oscillator 220 Second texture 221 Second thermoelectric element 222 Second oscillator 230 Rotating body 240 Motor 250 Vibration device 1000 Drive device 1001 Recording medium 1002 Auxiliary storage device 1003 Memory device 1004 CPU 1005 interface device 1006 display device 1007 input device 1008 output device
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- User Interface Of Digital Computer (AREA)
Abstract
Description
Translated fromJapanese本発明は、制御装置、感情伝達方法およびプログラムに関する。The present invention relates to a control device, an emotion transmission method, and a program.
通信ネットワークを介して感情を伝達する技術が開発されている。例えば、非特許文献1には、オンラインチャットにおいて打鍵の振動を示すデータを通信相手に送信する技術が開示されている。この技術により、オンラインゆえに読み取りにくい相手の感情を察しやすくなるため、コミュニケーションが円滑になる効果が示されている。Technology is being developed to transmit emotions via communication networks. For example, Non-Patent
上述した従来の技術では、例えば聞き手である受信ユーザは、例えば話し手である送信ユーザの感情の強さを振動の強さから判別できたとしても、どのような感情なのか、例えばポジティブな感情なのかネガティブな感情なのかの判別が難しいという問題がある。例えば、同じ振動を受信ユーザに伝えた場合、送信ユーザが楽しくてうきうきしている振動なのか、怒りのまま叩きつけている振動なのかがわからない。In the conventional technology described above, for example, even if the receiving user, who is the listener, can determine the intensity of the emotion of the transmitting user, who is the speaker, from the intensity of the vibration, what kind of emotion it is, for example, positive emotion. There is a problem that it is difficult to distinguish whether it is a negative emotion or a negative emotion. For example, when the same vibration is transmitted to the receiving user, it is not possible to tell whether the transmitting user is excited and excited or angry.
開示の技術は、送信ユーザの感情をより正確に受信ユーザに伝えることを目的とする。The disclosed technology aims to more accurately convey the emotions of the sending user to the receiving user.
開示の技術は、テキストデータに基づいて、送信ユーザの感情を推定する感情推定部と、推定された前記感情に対応する触感を決定する触感決定部と、決定された前記触感を受信ユーザに感じさせるように制御する制御部と、を備える制御装置である。The disclosed technology includes an emotion estimation unit that estimates the emotion of a sending user based on text data, a tactile sensation determination unit that determines a tactile sensation corresponding to the estimated emotion, and a receiving user that feels the determined tactile sensation. and a control unit that controls to cause the control device.
送信ユーザの感情をより正確に受信ユーザに伝えることができる。The sending user's emotions can be conveyed to the receiving user more accurately.
以下、図面を参照して本発明の実施の形態(本実施の形態)を説明する。以下で説明する実施の形態は一例に過ぎず、本発明が適用される実施の形態は、以下の実施の形態に限られるわけではない。An embodiment (this embodiment) of the present invention will be described below with reference to the drawings. The embodiments described below are merely examples, and embodiments to which the present invention is applied are not limited to the following embodiments.
(本実施の形態の概要)
本実施の形態に係る制御装置は、受信端末が送信端末から受信したテキストデータに基づいて、送信端末を操作するユーザの感情を推定して、推定した感情に対応する触感を決定する。そして、制御装置は、決定した触感を、受信端末を操作するユーザに感じさせるように、各種の機器を制御する。(Overview of this embodiment)
The control device according to the present embodiment estimates the emotion of the user operating the transmitting terminal based on the text data received by the receiving terminal from the transmitting terminal, and determines the tactile sensation corresponding to the estimated emotion. Then, the control device controls various devices so that the determined tactile sensation is felt by the user operating the receiving terminal.
以下、本実施の形態の具体的な実施例として、実施例1と実施例2について説明する。Examples 1 and 2 will be described below as specific examples of the present embodiment.
(実施例1)
まず、実施例1に係る感情伝達システムについて、図面を参照して説明する。(Example 1)
First, an emotion transfer system according to the first embodiment will be described with reference to the drawings.
(実施例1に係る感情伝達システムの概要)
本実施例に係る感情伝達システムは、振動子の振動と熱電素子の温度とを制御することによって、決定した触感を、受信端末を操作するユーザに感じさせる。(Overview of emotion transfer system according to embodiment 1)
The emotion transfer system according to the present embodiment controls the vibration of the vibrator and the temperature of the thermoelectric element to allow the user operating the receiving terminal to feel the determined tactile sensation.
(実施例1に係る感情伝達システムのシステム構成例)
図1は、実施例1に係る感情伝達システムのシステム構成例を示す図である。感情伝達システム1は、制御装置10と、受信端末20と、送信端末30と、通信ネットワーク40と、第一テクスチャ210と、第二テクスチャ220と、第一熱電素子211と、第二熱電素子221と、第一振動子212と、第二振動子222と、を備える。(System configuration example of emotion transfer system according to embodiment 1)
FIG. 1 is a diagram illustrating a system configuration example of an emotion transfer system according to a first embodiment. The
送信端末30および受信端末20は、通信ネットワーク40を介して通信可能に接続されている。また、制御装置10および受信端末20は、通信線41を介して通信可能に接続されている。さらに、制御装置10と、第一熱電素子211、第二熱電素子221、第一振動子212および第二振動子222とは、制御線42を介してそれぞれ通信可能に接続されている。The transmitting
送信端末30は、例えばオンラインチャットにおける話し手であるユーザ(以下、送信ユーザという)によって操作される端末である。送信端末30は、送信ユーザによって入力されたテキストを示すデータを、受信端末20に送信する。The sending
受信端末20は、例えばオンラインチャットにおける聞き手であるユーザ(以下、受信ユーザという)によって操作される端末である。受信端末20は、送信端末30から受信したテキストデータを、制御装置10に送信する。The
制御装置10は、例えばArduino等の制御器であって、受信端末20から受信したテキストデータに基づいて、第一熱電素子211、第二熱電素子221、第一振動子212および第二振動子222を制御する。The
第一テクスチャ210および第二テクスチャ220は、互いに異なる触感を感じさせるような材質から形成された表面を有する薄膜状の物体である。例えば、第一テクスチャ210は、「つるつる」の触感を感じさせる、アルミニウムから形成された表面を有する物体である。第二テクスチャ220は、「ふわふわ」の触感を感じさせる、綿から形成された表面を有する物体である。The
第一テクスチャ210は、第一熱電素子211および第一振動子212に近接して配置され、第一熱電素子211の発熱によって温度が上昇し、第一振動子212に連動して振動する。The
第二テクスチャ220も、同様に、第二熱電素子221および第二振動子222に近接して配置され、第二熱電素子221の発熱によって温度が上昇し、第二振動子222に連動して振動する。Similarly, the
第一熱電素子211および第二熱電素子221は、例えばペルチェ素子等であって、それぞれ制御装置10による制御を受けて熱を発する。The first thermoelectric element 211 and the second
第一振動子212および第二振動子222は、例えば円盤型振動モータ等であって、それぞれ制御装置10による制御を受けて振動する。The
(実施例1に係る受信端末の配置の一例)
図2は、実施例1に係る受信端末の配置の一例を示す図である。受信端末20は、例えば図2に示すようなキーボード21を備える。キーボード21の左側のパームレストには、第一テクスチャ210が貼り付けられている。また、キーボード21の右側のパームレストには、第二テクスチャ220が貼り付けられている。(Example of arrangement of receiving terminals according to the first embodiment)
FIG. 2 is a diagram illustrating an example of an arrangement of receiving terminals according to the first embodiment. The
第一熱電素子211および第一振動子212は、第一テクスチャ210の裏側に貼り付けられている。同様に、第二熱電素子221および第二振動子222は、第二テクスチャ220の裏側に貼り付けられている。The first thermoelectric element 211 and the
これによって、受信ユーザは、キーボード21を操作する際に、第一テクスチャ210および第二テクスチャ220に触れている状態となっている。そして、制御装置10によって第一熱電素子211が熱を発し、第一振動子212が振動すると、第一テクスチャ210の表面から感じられる触感が強調され、「つるつる」の触感を感じる。また、制御装置10によって第二熱電素子221が熱を発し、第二振動子222が振動すると、第二テクスチャ220の表面から感じられる触感が強調され、「ふわふわ」の触感を感じる。As a result, the receiving user is in a state of touching the
(実施例1に係る制御装置の機能構成例)
図3は、実施例1に係る制御装置の機能構成例を示す図である。制御装置10は、記憶部11と、感情推定部12と触感決定部13と、制御部14と、を備える。(Example of functional configuration of the control device according to the first embodiment)
FIG. 3 is a diagram illustrating a functional configuration example of a control device according to the first embodiment; The
記憶部11は、感情・触感関連データ100を記憶する。感情・触感関連データ100は、感情と触感との関連を規定するデータである。感情・触感関連データ100の具体例については後述する。The
感情推定部12は、受信したテキストデータに基づいて、送信ユーザの感情を推定する。感情推定部12は、感情推定の方法として、例えば参考文献[1]等の技術を適用しても良い。具体的には、感情推定部12は、テキストが表現する感情ごとのスコアを算出し、算出されたスコアに基づいて感情を推定する。The
例えば、感情推定部12は、「今朝は朝ごはんをしっかりと食べた」というテキストが表現する感情ごとのスコアを、最大値を1.0として「喜び」0.68、「好意」0.66、「恐れ」0.29、「悲しみ」0.14,「怒り」0.34のように算出する。感情推定部12は、送信ユーザの感情を、例えばスコアの最大値の感情(上記の例では「喜び」)と推定し、感情の強度を、当該感情のスコア(上記の例では0.68)と推定する。For example, the
触感決定部13は、推定された感情に基づいて、受信ユーザに感じさせる触感を決定する。具体的には、触感決定部13は、感情・触感関連データ100に基づいて、推定された感情に対応する触感を決定する。The tactile
制御部14は、推定された感情の強度と、決定された触感と、に基づいて、温度と振動を制御する。具体的には、制御部14は、振動制御部141と、温度制御部142と、を含む。振動制御部141は、第一振動子212および第二振動子222を制御する。温度制御部142は、第一熱電素子211および第二熱電素子221を制御する。The
振動制御部141は、決定された触感が第一触感である場合には、推定された感情の強度に応じた振動の強さとなるように第一振動子212を制御し、決定された触感が第二触感である場合には、推定された感情の強度に応じた振動の強さとなるように第二振動子222を制御する。When the determined tactile sensation is the first tactile sensation, the
ここで、振動制御部141は、感情の強度の最大値に対する割合に応じて、振動の出力を決定する。例えば、最大値1.00に対して推定された感情の強度が0.68である場合、最大値の68%程度の出力で第一振動子212または第二振動子222を振動させる。Here, the
温度制御部142は、決定された触感が第一触感である場合には、第一熱電素子211が熱を発するように制御し、決定された触感が第二触感である場合には、第二熱電素子221が熱を発するように制御する。When the determined tactile sensation is the first tactile sensation, the
(実施例1に係る制御装置が扱うデータの具体例)
図4は、感情・触感関連データの一例を示す図である。感情・触感関連データ100は、項目として、感情と、感情種別と、触感と、を含む。(Specific example of data handled by the control device according to the first embodiment)
FIG. 4 is a diagram showing an example of emotion/tactile sensation related data. Emotion/tactile sensation related
項目「感情」の値は、感情推定部12が推定する感情であって、予め規定されている。The value of the item "emotion" is the emotion estimated by the
項目「感情種別」の値は、それぞれの感情の種別を示す値であって、例えば「ポジティブ」および「ネガティブ」のいずれかの値である。The value of the item "emotion type" is a value that indicates the type of each emotion, and is, for example, either "positive" or "negative".
項目「触感」の値は、それぞれの感情の種別ごとに、関連付けられた触感を示す値であって、例えば、第一触感、第二触感のように、テクスチャの種類と対応付けられている。The value of the item "tactile sensation" is a value indicating the associated tactile sensation for each type of emotion, and is associated with the type of texture, for example, the first tactile sensation and the second tactile sensation.
なお、図4に示した感情・触感関連データ100は、感情と触感の関連を示すデータの一例であって、他でも良い。例えば、感情・触感関連データ100は、3つ以上の感情種別および触感を含んでも良い。その場合、感情伝達システム1は、対応するテクスチャ、熱電素子、振動子等の組み合わせを、3つ以上含むように構成される。すなわち、温度制御部142は、複数の熱電素子のうち、決定された触感を受信ユーザに感じさせる熱電素子の温度を制御する。また、振動制御部141は、複数の振動子のうち、温度を制御する熱電素子に対応する振動子を制御する。The emotion/tactile sensation related
また、触感は、「ふわふわ」、「つるつる」等のようなものでも良く、その場合、記憶部11は、それぞれの触感を感じさせるために制御すべき熱電素子および振動子を識別可能になるような対応情報を別途記憶する。例えば、感情・触感関連データ100は、参考文献[2]の図6に示される表のようなデータであっても良い。In addition, the tactile sensation may be “fluffy”, “smooth”, or the like. corresponding information is stored separately. For example, the emotion/tactile sensation related
(実施例1に係る制御装置の動作例)
次に、本実施例に係る制御装置10の動作について説明する。(Example of operation of the control device according to the first embodiment)
Next, the operation of the
図5は、実施例1に係る制御処理の流れの一例を示すフローチャートである。制御装置10は、定期的に、または受信端末20からの指示を受けて、制御処理を開始する。FIG. 5 is a flowchart showing an example of the flow of control processing according to the first embodiment. The
制御処理を開始すると、制御装置10は、受信端末20から受信することによって、テキストデータを取得する(ステップS11)。When the control process is started, the
感情推定部12は、取得したテキストデータに示されるテキストが表現する感情を推定する(ステップS12)。次に、触感決定部13は、推定された感情に対応する触感を決定する(ステップS13)。The
続いて、制御部14は、振動と温度を制御する(ステップS14)。具体的には、振動制御部141は、推定された感情の強度に応じて、第一振動子212または第二振動子222を制御する。また、温度制御部142は、決定された触感に応じて、第一熱電素子211または第二熱電素子221を制御する。Subsequently, the
(実施例1の効果)
本実施例に係る感情伝達システム1によれば、制御装置10は、受信端末20が送信端末30から受信したテキストデータに基づいて、送信ユーザの感情を推定して、推定した感情に対応する触感を決定する。そして、制御装置10は、決定した触感を受信ユーザに感じさせるように、振動と温度を制御する。これによって、送信ユーザの感情の推定結果に応じた触感を受信ユーザに感じさせることができる。(Effect of Example 1)
According to the
(実施例2)
以下に図面を参照して、実施例2について説明する。実施例2は、温度と振動を制御する代わりに、回転と振動を制御する点が、実施例1と相違する。よって、以下の実施例2の説明では、実施例1との相違点を中心に説明し、実施例1と同様の機能構成を有するものには、実施例1の説明で用いた符号と同様の符号を付与し、その説明を省略する。(Example 2)
A second embodiment will be described below with reference to the drawings. Example 2 differs from Example 1 in that instead of controlling temperature and vibration, rotation and vibration are controlled. Therefore, in the following description of the second embodiment, the differences from the first embodiment will be mainly described. Reference numerals are assigned and descriptions thereof are omitted.
(実施例2に係る感情伝達システムの概要)
本実施例に係る感情伝達システムは、振動子の振動と回転体の回転角度とを制御することによって、決定した触感を、受信端末を操作するユーザに感じさせる。(Overview of emotion transfer system according to embodiment 2)
The emotion transmission system according to the present embodiment controls the vibration of the vibrator and the rotation angle of the rotator to allow the user operating the receiving terminal to feel the determined tactile sensation.
(実施例2に係る感情伝達システムのシステム構成例)
図6は、実施例2に係る感情伝達システムのシステム構成例を示す図である。本実施例に係る感情伝達システム1は、制御装置10と、受信端末20と、送信端末30と、通信ネットワーク40と、第一テクスチャ210と、第二テクスチャ220と、回転体230と、モータ240と、振動装置250と、を備える。(System configuration example of the emotion transfer system according to the second embodiment)
FIG. 6 is a diagram illustrating a system configuration example of an emotion transfer system according to the second embodiment. The
受信端末20、送信端末30、通信ネットワーク40、第一テクスチャ210および第二テクスチャ220は、実施例1と同様である。The receiving
本実施例に係る制御装置10は、受信端末20から受信したテキストデータに基づいて、モータ240および振動装置250を制御する。The
また、本実施例に係る第一テクスチャ210および第二テクスチャ220は、回転体230の周囲に貼り付けられている。Also, the
回転体230は、例えば円柱形の物体であって、周囲に貼り付けられた第一テクスチャ210および第二テクスチャ220が受信ユーザに触れる配置となっている。そして、回転体230は、モータ240によって回転し、その回転角度に応じて第一テクスチャ210または第二テクスチャ220が受信ユーザに触れるように構成される。The body of
振動装置250は、振動を受信ユーザに感じさせるように配置される。振動装置250は、回転体230を介して振動を受信ユーザに感じさせても良いし、他の物体を介して、または直接に受信ユーザに触れるように構成されていても良い。The vibrating
(実施例2に係る制御装置の機能構成例)
図7は、実施例2に係る制御装置の機能構成例を示す図である。本実施例に係る制御装置10は、実施例1に係る制御装置10の温度制御部142に代えて、回転制御部143を備える。(Example of functional configuration of the control device according to the second embodiment)
FIG. 7 is a diagram illustrating a functional configuration example of a control device according to the second embodiment; The
また、記憶部11は、触感・回転角度関連データ101をさらに記憶する。触感・回転角度関連データ101は、触感と回転体230の回転角度との関連を示すデータである。触感・回転角度関連データ101の具体例については後述する。In addition, the
振動制御部141は、推定された感情の強度に応じた振動の強さとなるように、振動装置250を制御する。The
回転制御部143は、決定された触感を受信ユーザに感じさせるための回転角度を、触感・回転角度関連データ101に基づいて決定し、回転体230が決定された回転角度となるように、モータ240を制御する。The
(実施例2に係る制御装置が扱うデータの具体例)
図8は、触感・回転角度関連データの一例を示す図である。触感・回転角度関連データ101は、項目として、触感と、回転角度と、を含む。(Specific example of data handled by the control device according to the second embodiment)
FIG. 8 is a diagram showing an example of tactile sensation/rotational angle related data. The tactile sensation/rotation angle related
項目「触感」の値は、感情・触感関連データ100の項目「触感」の値と同じであり、例えば、第一触感、第二触感のように、テクスチャの種類と対応付けられている。The value of the item "tactile sensation" is the same as the value of the item "tactile sensation" of the emotion/tactile sensation related
項目「回転角度」の値は、第一テクスチャ210または第二テクスチャ220が受信ユーザに触れる位置になる回転体230の回転角度であって、あらかじめ設定される。The value of the item "rotation angle" is the rotation angle of the
(実施例2に係る制御装置の動作例)
次に、本実施例に係る制御装置10の動作について説明する。(Example of operation of the control device according to the second embodiment)
Next, the operation of the
本実施例に係る制御部14は、図5に示される制御処理のステップS14において、振動と温度を制御する代わりに、振動と回転角度を制御する。具体的には、振動制御部141は、推定された感情の強度に応じた振動の強さとなるように、振動装置250を制御する。The
回転制御部143は、決定された触感を受信ユーザに感じさせるための回転角度を、触感・回転角度関連データ101に基づいて決定し、回転体230が決定された回転角度となるように、モータ240を制御する。The
(実施例2の効果)
本実施例に係る感情伝達システム1によれば、制御装置10は、受信端末20が送信端末30から受信したテキストデータに基づいて、送信ユーザの感情を推定して、推定した感情に対応する触感を決定する。そして、制御装置10は、決定した触感を受信ユーザに感じさせるように、振動と回転角度を制御する。これによって、送信ユーザの感情の推定結果に応じた触感を受信ユーザに感じさせることができる。(Effect of Example 2)
According to the
(本実施の形態に係るハードウェア構成例)
制御装置10は、例えば、コンピュータに、本実施の形態で説明する処理内容を記述したプログラムを実行させることにより実現可能である。なお、この「コンピュータ」は、物理マシンであってもよいし、クラウド上の仮想マシンであってもよい。仮想マシンを使用する場合、ここで説明する「ハードウェア」は仮想的なハードウェアである。(Hardware configuration example according to the present embodiment)
The
上記プログラムは、コンピュータが読み取り可能な記録媒体(可搬メモリ等)に記録して、保存したり、配布したりすることが可能である。また、上記プログラムをインターネットや電子メール等、ネットワークを通して提供することも可能である。The above program can be recorded on a computer-readable recording medium (portable memory, etc.), saved, or distributed. It is also possible to provide the above program through a network such as the Internet or e-mail.
図9は、上記コンピュータのハードウェア構成例を示す図である。図9のコンピュータは、それぞれバスBで相互に接続されているドライブ装置1000、補助記憶装置1002、メモリ装置1003、CPU1004、インタフェース装置1005、表示装置1006、入力装置1007、出力装置1008等を有する。FIG. 9 is a diagram showing a hardware configuration example of the computer. The computer of FIG. 9 has a
当該コンピュータでの処理を実現するプログラムは、例えば、CD-ROM又はメモリカード等の記録媒体1001によって提供される。プログラムを記憶した記録媒体1001がドライブ装置1000にセットされると、プログラムが記録媒体1001からドライブ装置1000を介して補助記憶装置1002にインストールされる。但し、プログラムのインストールは必ずしも記録媒体1001より行う必要はなく、ネットワークを介して他のコンピュータよりダウンロードするようにしてもよい。補助記憶装置1002は、インストールされたプログラムを格納すると共に、必要なファイルやデータ等を格納する。A program that implements the processing in the computer is provided by a
メモリ装置1003は、プログラムの起動指示があった場合に、補助記憶装置1002からプログラムを読み出して格納する。CPU1004は、メモリ装置1003に格納されたプログラムに従って、当該装置に係る機能を実現する。インタフェース装置1005は、ネットワークに接続するためのインタフェースとして用いられる。表示装置1006はプログラムによるGUI(Graphical User Interface)等を表示する。入力装置1007はキーボード及びマウス、ボタン、又はタッチパネル等で構成され、様々な操作指示を入力させるために用いられる。出力装置1008は演算結果を出力する。なお、上記コンピュータは、CPU1004の代わりにGPU(Graphics Processing Unit)またはTPU(Tensor processing unit)を備えていても良く、CPU1004に加えて、GPUまたはTPUを備えていても良い。その場合、例えば特殊な演算が必要な処理をGPUまたはTPUが実行し、その他の処理をCPU1004が実行する、というように処理を分担して実行しても良い。The
(参考文献)
[1]:User Local,Inc.,音声感情認識AI,[online],インターネット<URL:https://emotion-voice-ai.userlocal.jp/>
[2]:Sato, D., Sasagawa, M., & Niijima, A. Affective Touch Robots with Changing Textures and Movements. In 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN) (pp. 1-6). IEEE.(References)
[1]: User Local, Inc., voice emotion recognition AI, [online], Internet <URL: https://emotion-voice-ai.userlocal.jp/>
[2]: Sato, D., Sasagawa, M., & Niijima, A. Affective Touch Robots with Changing Textures and Movements. In 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN) (pp. 1- 6).IEEE.
(実施の形態のまとめ)
本明細書には、少なくとも下記の各項に記載した制御装置、感情伝達方法およびプログラムが記載されている。
(第1項)
テキストデータに基づいて、送信ユーザの感情を推定する感情推定部と、
推定された前記感情に対応する触感を決定する触感決定部と、
決定された前記触感を受信ユーザに感じさせるように制御する制御部と、を備える、
制御装置。
(第2項)
前記感情推定部は、前記送信ユーザの感情の強度を推定し、
前記制御部は、推定された前記感情の強度に応じた振動を前記受信ユーザに感じさせるように制御する、
第1項に記載の制御装置。
(第3項)
前記制御部は、複数の熱電素子のうち、決定された前記触感を前記受信ユーザに感じさせる熱電素子の温度を制御する、
第2項に記載の制御装置。
(第4項)
前記制御部は、複数の振動子のうち、温度を制御する熱電素子に対応する振動子を制御する、
第3項に記載の制御装置。
(第5項)
前記制御部は、決定された前記触感を前記受信ユーザに感じさせるように、回転体の回転角度を制御する、
第2項に記載の制御装置。
(第6項)
制御装置が実行する感情伝達方法であって、
テキストデータに基づいて、送信ユーザの感情を推定するステップと、
推定された前記感情に対応する触感を決定するステップと、
決定された前記触感を受信ユーザに感じさせるように制御するステップと、を備える、
感情伝達方法。
(第7項)
コンピュータを、第1項から第5項のいずれか1項に記載の制御装置における各部として機能させるためのプログラム。(Summary of embodiment)
This specification describes at least a control device, an emotion transmission method, and a program described in each of the following items.
(Section 1)
an emotion estimation unit that estimates the emotion of the sending user based on the text data;
a tactile sense determination unit that determines a tactile sense corresponding to the estimated emotion;
a control unit that controls the receiving user to feel the determined tactile sensation;
Control device.
(Section 2)
The emotion estimation unit estimates the intensity of emotion of the sending user,
The control unit performs control so that the receiving user feels vibration according to the estimated intensity of the emotion.
A control device according to
(Section 3)
The control unit controls the temperature of a thermoelectric element that causes the receiving user to feel the determined tactile sensation among the plurality of thermoelectric elements.
3. A control device according to claim 2.
(Section 4)
The control unit controls, among the plurality of vibrators, a vibrator corresponding to a thermoelectric element that controls temperature.
A control device according to claim 3.
(Section 5)
The control unit controls the rotation angle of the rotating body so that the receiving user feels the determined tactile sensation.
3. A control device according to claim 2.
(Section 6)
An emotion transmission method executed by a control device,
estimating the sending user's sentiment based on the text data;
determining a tactile sensation corresponding to the estimated emotion;
and controlling the receiving user to feel the determined tactile sensation.
method of conveying emotions.
(Section 7)
A program for causing a computer to function as each unit in the control device according to any one of
以上、本実施の形態について説明したが、本発明はかかる特定の実施形態に限定されるものではなく、請求の範囲に記載された本発明の要旨の範囲内において、種々の変形・変更が可能である。Although the present embodiment has been described above, the present invention is not limited to such a specific embodiment, and various modifications and changes are possible within the scope of the gist of the present invention described in the claims. is.
10 制御装置
11 記憶部
12 感情推定部
13 触感決定部
14 制御部
20 受信端末
30 送信端末
40 通信ネットワーク
41 通信線
42 制御線
100 感情・触感関連データ
101 触感・回転角度関連データ
141 振動制御部
142 温度制御部
143 回転制御部
210 第一テクスチャ
211 第一熱電素子
212 第一振動子
220 第二テクスチャ
221 第二熱電素子
222 第二振動子
230 回転体
240 モータ
250 振動装置
1000 ドライブ装置
1001 記録媒体
1002 補助記憶装置
1003 メモリ装置
1004 CPU
1005 インタフェース装置
1006 表示装置
1007 入力装置
1008 出力装置10
1005
Claims (7)
Translated fromJapanese推定された前記感情に対応する触感を決定する触感決定部と、
決定された前記触感を受信ユーザに感じさせるように制御する制御部と、を備える、
制御装置。an emotion estimation unit that estimates the emotion of the sending user based on the text data;
a tactile sense determination unit that determines a tactile sense corresponding to the estimated emotion;
a control unit that controls the receiving user to feel the determined tactile sensation;
Control device.
前記制御部は、推定された前記感情の強度に応じた振動を前記受信ユーザに感じさせるように制御する、
請求項1に記載の制御装置。The emotion estimation unit estimates the intensity of emotion of the sending user,
The control unit performs control so that the receiving user feels vibration according to the estimated intensity of the emotion.
A control device according to claim 1 .
請求項2に記載の制御装置。The control unit controls the temperature of a thermoelectric element that causes the receiving user to feel the determined tactile sensation among the plurality of thermoelectric elements.
3. A control device according to claim 2.
請求項3に記載の制御装置。The control unit controls, among the plurality of vibrators, a vibrator corresponding to a thermoelectric element that controls temperature.
4. A control device according to claim 3.
請求項2に記載の制御装置。The control unit controls the rotation angle of the rotating body so that the receiving user feels the determined tactile sensation.
3. A control device according to claim 2.
テキストデータに基づいて、送信ユーザの感情を推定するステップと、
推定された前記感情に対応する触感を決定するステップと、
決定された前記触感を受信ユーザに感じさせるように制御するステップと、を備える、
感情伝達方法。An emotion transmission method executed by a control device,
estimating the sending user's sentiment based on the text data;
determining a tactile sensation corresponding to the estimated emotion;
and controlling the receiving user to feel the determined tactile sensation.
method of conveying emotions.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/025049WO2023276130A1 (en) | 2021-07-01 | 2021-07-01 | Control device, emotion transmission method, and program |
| JP2023531311AJP7635842B2 (en) | 2021-07-01 | 2021-07-01 | Control device, emotion transmission method and program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/025049WO2023276130A1 (en) | 2021-07-01 | 2021-07-01 | Control device, emotion transmission method, and program |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023276130A1true WO2023276130A1 (en) | 2023-01-05 |
Family
ID=84692598
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/025049CeasedWO2023276130A1 (en) | 2021-07-01 | 2021-07-01 | Control device, emotion transmission method, and program |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7635842B2 (en) |
| WO (1) | WO2023276130A1 (en) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005284822A (en)* | 2004-03-30 | 2005-10-13 | Seiko Epson Corp | Emotion matching device, emotion matching method, and program |
| JP2013509652A (en)* | 2009-10-29 | 2013-03-14 | イマージョン コーポレイション | System and method for tactile enhancement of speech-to-text conversion |
| JP2014526829A (en)* | 2011-09-09 | 2014-10-06 | クゥアルコム・インコーポレイテッド | Emotion transmission as tactile feedback |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019167848A1 (en) | 2018-02-27 | 2019-09-06 | パナソニックIpマネジメント株式会社 | Data conversion system, data conversion method, and program |
| JP6804697B1 (en) | 2019-12-26 | 2020-12-23 | 三菱電機株式会社 | Tactile presentation control device, tactile presentation panel, tactile presentation touch panel, and tactile presentation touch display |
- 2021
- 2021-07-01WOPCT/JP2021/025049patent/WO2023276130A1/ennot_activeCeased
- 2021-07-01JPJP2023531311Apatent/JP7635842B2/enactiveActive
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005284822A (en)* | 2004-03-30 | 2005-10-13 | Seiko Epson Corp | Emotion matching device, emotion matching method, and program |
| JP2013509652A (en)* | 2009-10-29 | 2013-03-14 | イマージョン コーポレイション | System and method for tactile enhancement of speech-to-text conversion |
| JP2014526829A (en)* | 2011-09-09 | 2014-10-06 | クゥアルコム・インコーポレイテッド | Emotion transmission as tactile feedback |
Non-Patent Citations (2)
| Title |
|---|
| SATO DAIKI; SASAGAWA MANA; NIIJIMA ARINOBU: "Affective Touch Robots with Changing Textures and Movements", 2020 29TH IEEE INTERNATIONAL CONFERENCE ON ROBOT AND HUMAN INTERACTIVE COMMUNICATION (RO-MAN), IEEE, 31 August 2020 (2020-08-31), pages 1 - 6, XP033841557, DOI: 10.1109/RO-MAN47096.2020.9223481* |
| YAMADA, YUKO: "TangibleChat: A Chat-system that Conveys Conversion-context-awareness by Transmitting Vibration Produced by Key-stroke-act", 5IPSJ JOURNAL, vol. 44, no. 5, 15 May 2003 (2003-05-15), pages 1392 - 1403* |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2023276130A1 (en) | 2023-01-05 |
| JP7635842B2 (en) | 2025-02-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8024407B2 (en) | Methods and systems for providing access, from within a virtual world, to an external resource | |
| JP6161549B2 (en) | Chat interface with haptic feedback functionality | |
| US9891931B2 (en) | Techniques for efficient remote presentation session connectivity and routing | |
| US9495221B2 (en) | Automatic configuration information generation for distributed computing environment | |
| EP4123478B1 (en) | Systems, methods, and apparatuses for providing assistant deep links to effectuate third-party dialog session transfers | |
| US20130212501A1 (en) | Perceptual computing with conversational agent | |
| CN113467617B (en) | Haptic feedback method, device, apparatus and storage medium | |
| WO2002099603A2 (en) | Method and apparatus for remote physical contact | |
| US20190018700A1 (en) | Hyper-converged computing device | |
| CN114432692B (en) | VR control method and device for cloud game | |
| WO2024091333A1 (en) | Handoff of executing application between local and cloud-based computing devices | |
| WO2023276130A1 (en) | Control device, emotion transmission method, and program | |
| CN114217900B (en) | Remote control method, device, system, computing device and storage medium | |
| CN110543290A (en) | multimodal response | |
| US20120117490A1 (en) | Methods and systems for providing access, from within a virtual world, to an external resource | |
| CN108255547B (en) | Application control method and device | |
| JP2014215652A (en) | Information processing device, information processing system, and authentication processing method | |
| WO2021172580A1 (en) | Position/force control system, worn unit, control unit, position/force control method, and program | |
| CN113646057B (en) | Cross-device accessory input and output for enhanced gaming experience | |
| WO2023197989A1 (en) | Processing method, system and apparatus for image | |
| CN115421841A (en) | Notification processing method, terminal device, server and computer storage medium | |
| KR101659580B1 (en) | Apparatus and Method for Providing Virtual Desktop Infratructure | |
| TW202101278A (en) | Method, computer system and computer readable recording medium of providing font tag | |
| US12099860B1 (en) | Systems and methods for an enhanced support session using an artificial intelligence-based conversational assistant | |
| JP2013066036A (en) | Service providing system, service providing method, portable terminal device, and program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application | Ref document number:21948434 Country of ref document:EP Kind code of ref document:A1 | |
| WWE | Wipo information: entry into national phase | Ref document number:2023531311 Country of ref document:JP | |
| NENP | Non-entry into the national phase | Ref country code:DE | |
| 122 | Ep: pct application non-entry in european phase | Ref document number:21948434 Country of ref document:EP Kind code of ref document:A1 |