WO2023116267A1 - Ambiguity fixing method for navigation system, chip, device, and transportation - Google Patents
Ambiguity fixing method for navigation system, chip, device, and transportationDownload PDFInfo
- Publication number
- WO2023116267A1 WO2023116267A1PCT/CN2022/132055CN2022132055WWO2023116267A1WO 2023116267 A1WO2023116267 A1WO 2023116267A1CN 2022132055 WCN2022132055 WCN 2022132055WWO 2023116267 A1WO2023116267 A1WO 2023116267A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- dimensional
- ambiguity
- particle
- coordinates
- coordinate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images




Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/43—Determining position using carrier phase measurements, e.g. kinematic positioning; using long or short baseline interferometry
- G01S19/44—Carrier phase ambiguity resolution; Floating ambiguity; LAMBDA [Least-squares AMBiguity Decorrelation Adjustment] method
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/393—Trajectory determination or predictive tracking, e.g. Kalman filtering
Definitions
- the present applicationrelates to the technical field of navigation, in particular to a method for fixing ambiguity of a navigation system, a corresponding navigation chip, a corresponding navigation device and a corresponding vehicle.
- Attitude positioningis an indispensable and important part of navigation and positioning systems. It is mainly used to provide three-dimensional attitude information of the carrier, including heading angle, pitch angle and roll angle. Generally, the roll angle of the aircraft is small, and has little influence on the flight and control of the aircraft. In practice, only the main and auxiliary antennas for determining the heading angle and pitch angle of the aircraft are erected. In the attitude positioning of GNSS (Global Navigation Satellite System, the global navigation and positioning system), the prerequisite for obtaining attitude information is to quickly realize the ambiguity resolution of the short baseline of the main and auxiliary antennas, so as to calculate the main and auxiliary antennas through the three-dimensional position vector of the short baseline. Attitude information in the navigation coordinate system.
- GNSSGlobal Navigation Satellite System
- GNSS attitude positioning ambiguity resolution methodsThere are three commonly used GNSS attitude positioning ambiguity resolution methods as follows: ambiguity fixation method based on observation value domain, ambiguity search method based on ambiguity domain and ambiguity search method based on coordinate domain, but these three methods have Their respective flaws cause the problem of low success rate of ambiguity estimation and fixation in special cases.
- the embodiments of the present applicationare proposed to provide a navigation system ambiguity fixing method, a corresponding navigation chip, a corresponding navigation device and a corresponding navigation system that overcome the above problems or at least partially solve the above problems.
- a means of transportationa means of transportation.
- the embodiment of the present applicationdiscloses a method for fixing ambiguity of a navigation system.
- the methodincludes:
- the preferred coordinate value for the auxiliary antennais determined from the two-dimensional coordinate expression of the auxiliary antenna;
- the integer solution of the ambiguityis calculated according to the optimal coordinate value of the secondary antenna, and the ambiguity of the navigation system is fixed.
- the three-dimensional space coordinates of the auxiliary antennaare converted into two-dimensional coordinate expressions based on the spatial straight-line distance of the main and auxiliary antennas, including:
- the coordinate expression of the Z componentis used to express by using the three-dimensional space coordinates of the main antenna and the X and Y component coordinates in the three-dimensional space coordinates of the secondary antenna.
- the preferred coordinate value for the auxiliary antennais determined from the two-dimensional coordinate expression of the auxiliary antenna, including:
- the convergence intervalis used to represent the coordinate range that meets the particle population optimization
- the optimal coordinate value of the optimal particleis determined from the convergence interval.
- the candidate interval expressed for the two-dimensional coordinates of the secondary antennais set, including:
- the candidate interval expressed by the two-dimensional coordinates of the auxiliary antennais determined;
- the candidate interval expressed by the two-dimensional coordinates of the auxiliary antennais determined, including:
- the convergence interval expressed for the two-dimensional coordinates of the secondary antennais determined, including:
- the convergence interval expressed for the two-dimensional coordinates of the sub-antennais determined according to the double-difference phase observation equation; the convergence interval is used for coordinate search of the optimal particle.
- the convergence interval expressed for the two-dimensional coordinates of the secondary antennais determined according to the double-difference phase observation equation, including:
- the error propagation law and the three-dimensional space coordinates of the main antennaare used to calculate the median error of the ambiguity for the constructed phase observation equation, and the convergence interval for coordinate search of the preferred particle is determined based on the required threshold of the centering error.
- the optimal coordinate value of the preferred particleis determined from the convergence interval, including:
- the particle populationis optimized using the preset particle population optimization algorithm
- the optimal particle of the targetis determined from the optimized particle population and the optimal coordinate value of the optimal particle of the target is output.
- the current preferred particleis determined according to the ambiguity function value of the particle population, including:
- the fitness of each particleis sorted in descending order, and the particle at the top of the list is determined to be the current preferred particle.
- the set sub-antenna coordinate candidate intervalinitialize the velocity and position of all particles, and then calculate the corresponding ambiguity function value according to the position of the particle, because the more accurate the candidate coordinates of the sub-antenna, the greater the ambiguity function value, at this time
- the fitness of each particleis sorted in descending order, and the optimal individual and the optimal group are selected.
- the particle populationis optimized by using the preset particle population optimization algorithm, including:
- the embodiment of the present applicationalso discloses a device for fixing ambiguity of a navigation system, which includes:
- the coordinate conversion moduleis used to obtain the space straight-line distance of the main and auxiliary antennas, and convert the three-dimensional space coordinates of the auxiliary antennas into two-dimensional coordinate expressions based on the space straight-line distances of the main and auxiliary antennas;
- the preferred coordinate value determination moduleis used to determine the preferred coordinate value for the secondary antenna from the two-dimensional coordinate expression of the secondary antenna according to the ambiguity function value expressed by the two-dimensional coordinate value of the secondary antenna;
- the ambiguity fixing moduleis used to calculate the integer solution of the ambiguity according to the optimal coordinate value of the secondary antenna, and complete the ambiguity fixing of the navigation system.
- the coordinate conversion moduleincludes:
- the coordinate conversion sub-moduleis used to obtain the three-dimensional space coordinates of the main antenna, and uses the calculation formula of the three-dimensional space distance line to inversely calculate the space line distance of the main and auxiliary antennas based on the three-dimensional space coordinates of the main and auxiliary antennas to obtain the three-dimensional space coordinates of the auxiliary antenna.
- the coordinate expression of the Z component; the coordinate expression of the Z componentis used to express the three-dimensional space coordinates of the main antenna and the X and Y component coordinates of the three-dimensional space coordinates of the auxiliary antenna.
- the preferred coordinate value determination moduleincludes:
- the interval setting sub-moduleis used to set the candidate interval for the expression of the two-dimensional coordinates of the auxiliary antenna, and determine the convergence interval for the expression of the two-dimensional coordinates of the auxiliary antenna; the convergence interval is used to represent the coordinate range that meets the optimization of the particle population;
- the fuzzy function value acquisition submoduleis used to obtain the fuzzy degree function value of the particle population corresponding to the two-dimensional coordinate expression in the candidate interval;
- the optimal coordinate value determination sub-moduleis used to determine the optimal coordinate value of the optimal particle from the convergence interval according to the ambiguity function value of the particle population and the preset particle population optimization algorithm.
- the interval setting submoduleincludes:
- the candidate interval determination unitis configured to determine the candidate interval expressed by the two-dimensional coordinates of the auxiliary antenna according to the three-dimensional space coordinates of the auxiliary antenna or the coordinate prediction value after dynamic positioning state update based on the three-dimensional space coordinates.
- the candidate interval determination unitincludes:
- the candidate interval determination subunitis used to set the coordinate search interval for a single component in the three-dimensional space coordinates of the auxiliary antenna, with the coordinates of the three-dimensional X and Y components of the auxiliary antenna as the center, and the coordinate search interval is the search distance.
- the interval setting submoduleincludes:
- the observation equation construction unitis used to obtain the double-difference satellite distance value and the double-difference observation value of the main and auxiliary antennas, and the double-difference satellite distance value and the double-difference observation value of the main and auxiliary antennas are used to construct the double-difference phase observation equation;
- the convergence interval determination unitis used to determine the convergence interval expressed for the two-dimensional coordinates of the sub-antenna according to the double-difference phase observation equation; the convergence interval is used for coordinate search of the preferred particle.
- the convergence interval determination unitincludes:
- the convergence interval determination subunitis used to calculate the middle error of the ambiguity for the phase observation equation constructed by using the error propagation law and the three-dimensional space coordinates of the main antenna, and determine the required threshold based on the centering error for coordinate search of the preferred particle the convergence interval.
- the preferred coordinate value determination submoduleincludes:
- a preferred particle determination unitis used to determine the current preferred particle according to the ambiguity function value of the particle population
- the particle population optimal unitis used to optimize the particle population by using the preset particle population optimization algorithm when the coordinate distribution of the current optimal particle does not meet the convergence interval;
- the optimal coordinate value determining unitis configured to determine the optimal target particle from the optimized particle population based on the ambiguity function value of each particle in the optimized particle population and output the optimal coordinate value of the target optimal particle.
- the particle determination unitincludes:
- the particle initialization subunitis used to initialize the velocity and position of all particles in the current particle population in the set candidate interval expressed for the two-dimensional coordinates of the secondary antenna;
- the ambiguity function value calculation subunitis used to calculate the preliminary ambiguity function value of each particle based on the position of each particle in the particle population;
- the optimal particle determination subunitis used to sort the fitness of each particle in descending order according to the preliminary ambiguity function value, and determine the particle at the top of the list as the current optimal particle.
- the particle population optimization sub-moduleincludes:
- a preferred value determination unitis used to obtain the maximum velocity and the maximum position of the particles in the particle population, and use the maximum velocity and the maximum position as the preferred position and preferred velocity of the preferred particles, respectively;
- a particle updating unitconfigured to update the speed and position of all particles in the particle population by using the preferred position and preferred speed of the preferred particle
- the particle population optimization unitis used to obtain the optimal population and optimal coordinates in the particle population, and optimize all the particles in the optimal population along the direction of the optimal coordinates until the coordinate distribution of the particles in the optimal population satisfies the convergence interval.
- the embodiment of the present applicationalso discloses a navigation chip, including: a processor; a memory executable by the processor; wherein, the processor is coupled to the memory, and is used to read the program instructions stored in the memory, and in response, execute any Ambiguity Fixing Methods for Item Navigation Systems.
- the embodiment of the present applicationalso discloses a navigation module, including: a processor; a memory executable by the processor; wherein, the processor is coupled to the memory, and is used to read the program instructions stored in the memory, and in response, execute any An ambiguity fixation method for navigation systems.
- the embodiment of the present applicationalso discloses a navigation device, including: a processor; a memory that stores the executable memory of the processor; wherein, the processor is coupled to the memory, and is used to read the program instructions stored in the memory, and in response, execute any Ambiguity Fixing Methods for Item Navigation Systems.
- the embodiment of the present applicationalso discloses a vehicle, including: the ambiguity fixing device of the navigation system or the above-mentioned navigation chip or the above-mentioned navigation module or the above-mentioned navigation equipment, a processor, a memory, and a device stored on the memory and capable of being stored on the processor
- the running computer programwhen the computer program is executed by the processor, realizes the ambiguity fixing method of any navigation system.
- the embodiment of the present applicationalso discloses a computer-readable storage medium, on which a computer program is stored, and when the computer program is executed by a processor, any method for fixing ambiguity of a navigation system is realized.
- the three-dimensional coordinates of the secondary antennasare converted into two-dimensional coordinate expressions by introducing the known geometric space distances of dual/multi-antennas, thereby directly compressing the original three-dimensional search space into a two-dimensional search space, And according to the ambiguity function method as the evaluation index, it continuously evolves and approaches the direction of the optimal candidate coordinates, and finally searches for the optimal coordinate value of the sub-antenna, and then obtains the integer solution of the ambiguity based on the optimal candidate coordinates, which reduces the coordinate search.
- the dimensionimproves the efficiency of coordinate search, and its method is not affected by the number of satellites and the cycle slip of observation values, and realizes the rapid fixation of GNSS attitude positioning ambiguity.
- Fig. 1is a flow chart of the steps of the embodiment of the ambiguity fixing method of the navigation system provided by the present application;
- Fig. 2is another flow chart of the steps of the embodiment of the ambiguity fixing method of the navigation system provided by the present application;
- Fig. 3is a schematic flow chart of the ambiguity fixing of the navigation system provided by the embodiment of the present application.
- Fig. 4is a schematic diagram of the particle population optimization provided by the embodiment of the present application.
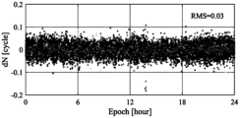
- Fig. 5is a schematic diagram of the time series of the fractional part of the ambiguity provided by the embodiment of the present application.
- Fig. 6is a structural block diagram of an embodiment of an apparatus for fixing ambiguity in a navigation system provided by the present application.
- GNSS attitude positioning ambiguity resolution methodsmainly include three methods: the ambiguity fixing method based on the observation value domain, the ambiguity search method based on the ambiguity domain, and the ambiguity search method based on the coordinate domain.
- the first ambiguity fixing methodbased on the observation range. It mainly determines the integer ambiguity by directly using the C/A code or P code pseudo-range (C/A code and P code are both pseudo-random codes, modulated on the carrier wave band of the navigation satellite signal), because the pseudo-range observation value
- C/A code and P codeare both pseudo-random codes, modulated on the carrier wave band of the navigation satellite signal
- the accuracyis low, and the combination of multiple frequency observations is often used to fix the ambiguity, but the actual fixation success rate is low.
- the second ambiguity search method based on the ambiguity domainfirstly, the integer least squares estimation theory can be used to estimate the floating-point solution of the ambiguity parameters, and then the integer solution of the ambiguity can be fixed by using descending correlation and various search methods, among which The most common method is the least squares descending correlation method (LAMBDA, Leastsquare AMBiguity Decorrelation Adjustment, which is a widely used ambiguity fixing method).
- LAMBDAleast squares descending correlation method
- Leastsquare AMBiguity Decorrelation Adjustmentwhich is a widely used ambiguity fixing method.
- This type of ambiguity fixing methodrelies heavily on the accuracy of the ambiguity floating-point solution and its covariance matrix. When the number of satellites is small or the observation value is noisy, the ambiguity floating-point solution has low precision and cannot correctly fix the ambiguity.
- the third ambiguity search method based on the coordinate fieldmainly uses the integer characteristics of ambiguity to inversely calculate the integer ambiguity by searching three-dimensional coordinates.
- the performance of the methodis not significantly affected by the small number of satellites or the large observation noise, and the method is not sensitive to the cycle slip of the observation value, which can avoid the problem of cycle slip detection and repair.
- the coordinate searchis mainly for the three-dimensional coordinates of the mobile station, and the calculation amount is large, which is not conducive to practical application.
- One of the core ideas of some embodiments of the present applicationis to combine the traditional coordinate search method with the characteristics of GNSS attitude positioning, and convert the three-dimensional position of the auxiliary antenna into a two-dimensional coordinate expression by using the spatial distance of the main and auxiliary antennas as a constraint condition , use the particle population optimization algorithm to search for the two-dimensional optimal coordinates of the sub-antenna candidates, and use the AFM (Ambiguity Function Method, ambiguity function method, which is a method of determining the ambiguity by using the integer characteristics of the ambiguity) as the evaluation index to determine
- the optimal position of the sub-antenna, and the integer solution of the ambiguityis directly back-calculated based on the optimal position, so as to realize the fast fixation of the ambiguity of GNSS attitude positioning, reduce the dimension of coordinate search, and improve the efficiency of coordinate search.
- Affected by the number of satellites and the cycle slip of observationsit can not only be used as a supplement to the traditional ambiguity domain search method,
- FIG. 1shows a flow chart of steps of an embodiment of a method for fixing ambiguity of a navigation system provided by the present application, which may specifically include the following steps:
- Step 101obtaining the spatial straight-line distance of the main and auxiliary antennas, and converting the three-dimensional spatial coordinates of the auxiliary antennas into two-dimensional coordinate expressions based on the spatial straight-line distances of the main and auxiliary antennas;
- the rapid fixation of ambiguityis accomplished by combining the traditional coordinate search method with the characteristics of GNSS attitude positioning.
- the combination of the characteristics of GNSS attitude positioningcan be mainly manifested in the dual-antenna GNSS attitude positioning.
- the known spatial linear distance of the dual antennasis used as the constraint information of the coordinate parameters of the main and auxiliary antennas.
- the three-dimensional space coordinates of the original and auxiliary antennasare converted into Two-dimensional coordinate expression, so that the original three-dimensional search space in the traditional coordinate search method can be directly compressed into a two-dimensional search space, reducing the amount of calculation required for coordinate search and improving the actual application rate of coordinate search.
- Step 102according to the ambiguity function value expressed by the two-dimensional coordinates of the auxiliary antenna, determine the preferred coordinate value for the auxiliary antenna from the two-dimensional coordinate expression of the auxiliary antenna;
- the particle population optimization algorithmcan be used to search for the global optimality of the two-dimensional coordinate domain of the sub-antenna, and the fitness evaluation index can be determined according to the ambiguity function method
- Optimal coordinate valuesthat is, by calculating the ambiguity function value expressed by the two-dimensional coordinates of the secondary antenna, based on the calculated ambiguity function values expressed by each two-dimensional coordinate, determine the ambiguity function value for the secondary antenna from the two-dimensional coordinate expression of the secondary antenna
- the coordinate valuesare optimized to determine the ambiguity of the navigation system based on the output coordinate values.
- the particle swarm optimization algorithm adoptedcan be expressed as a particle swarm search method.
- the populationincludes multiple particles, each particle has a different speed and position, and each particle can consider its own searched historical optimal point and The best points in the history of other particles, constantly updating their speed and position, and finally making themselves evolve towards the direction of optimal coordinates, in order to avoid falling into local optimum, introduce particle mutation and other operations, that is, at this time, the optimal particle individual can be found
- the extremumis the current global optimal solution of the entire particle swarm, and this global optimal solution is used as the optimal coordinate value that can be used to fix the ambiguity.
- intelligent optimization algorithmssuch as improved genetic algorithm can be used in the optimal search of the two-dimensional coordinates of the sub-antenna.
- Different algorithmshave different specific implementation steps, but the principles are the same According to the ambiguity function method as the evaluation index, it continuously evolves and moves towards the direction of the optimal candidate coordinates, and finally searches to obtain the optimal coordinate value.
- the particle swarm optimization method adopted in some embodiments of the present applicationhas the highest search efficiency. Some embodiments of the present application do not limit the optimal search method for the two-dimensional coordinates of the secondary antenna.
- step 103the integer solution of the ambiguity is calculated according to the optimal coordinate value of the secondary antenna, and the ambiguity of the navigation system is fixed.
- the ambiguity of the navigation systemhas integer characteristics. After the optimal coordinate value is obtained based on the ambiguity function value that also has integer characteristics as the fitness index output of each particle, it can be directly started from the candidate coordinates of the secondary antenna. According to the integer characteristics of the ambiguity , directly search for the optimal candidate coordinates and then inversely calculate the fixed ambiguity, which is not affected by pseudo-range noise without using pseudo-range observations, and is also applicable to the ambiguity of single-frequency/dual-frequency/multi-frequency observations The degree of ambiguity is fixed and is basically not affected by the number of satellites.
- the insensitive featuredoes not require cycle slip detection and repair work, especially when the observation environment is complex and there are many cycle slips in the observation value, it can further improve the search efficiency of the ambiguity in the coordinate domain.
- the optimal coordinates of the sub-antennacan be inversely calculated to obtain the floating-point solution of the ambiguity, and the floating-point solution of the ambiguity can be rounded to obtain an integer solution of the ambiguity to complete the fixation of the ambiguity.
- the three-dimensional coordinates of the secondary antennasare converted into two-dimensional coordinate expressions by introducing the known geometric space distances of dual/multi-antennas, thereby directly compressing the original three-dimensional search space into a two-dimensional search space, And according to the ambiguity function method as the evaluation index, it continuously evolves and approaches the direction of the optimal candidate coordinates, and finally searches for the optimal coordinate value of the sub-antenna, and then obtains the integer solution of the ambiguity based on the optimal candidate coordinates, which reduces the coordinate search.
- the dimensionimproves the efficiency of coordinate search, and its method is not affected by the number of satellites and the cycle slip of observation values, and realizes the rapid fixation of GNSS attitude positioning ambiguity.
- FIG. 2shows another flow chart of the steps of the embodiment of the ambiguity fixing method of the navigation system provided by the present application, which may specifically include the following steps:
- Step 201converting the three-dimensional spatial coordinates of the auxiliary antennas into two-dimensional coordinate expressions based on the spatial straight-line distances of the main and auxiliary antennas;
- the known two-antenna spatial straight-line distancecan be used as the constraint information of the coordinate parameters of the main and auxiliary antennas, and the three-dimensional space coordinates of the original and auxiliary antennas can be converted into two-dimensional coordinate expressions, so that the traditional coordinates
- the original three-dimensional search space in the search methodis directly compressed into a two-dimensional search space, which reduces the amount of calculation required for coordinate search and improves the actual application rate of coordinate search.
- the constraint information on the coordinate parameters of the main and auxiliary antennasis mainly to establish the two-dimensional expression of the three-dimensional coordinates of the auxiliary antennas by combining the known spatial straight-line distances of the main and auxiliary antennas.
- the calculation formula of the three-dimensional space distance linecan be used to inversely calculate the space line distance of the main and auxiliary antennas based on the three-dimensional space coordinates of the main and auxiliary antennas, and obtain the coordinate expression of the Z component in the three-dimensional space coordinates of the auxiliary antenna, that is, use
- the three-dimensional space coordinates of the main antenna and the coordinates of the X and Y components in the three-dimensional space coordinates of the auxiliary antennarepresent the coordinate expression of the Z component.
- the three-dimensional space coordinates of the main u1 and the auxiliary antenna u2can be expressed as (X u1 , Y u1 , Z u1 ) and (X u2 , Y u2 , Z u2 ).
- the Z component coordinates of the secondary antennacan be expressed as:
- Z′ u2Z u1 ⁇ Sqrt(dS 2 -(X u1 -X u2 ) 2 -(Y u1 -Y u2 ) 2 )
- Sqrt()can be a square root function.
- Z′ u2that is closer to the original three-dimensional coordinates (X u2 , Y u2 , Z u2 ) of the auxiliary antenna can be used as the correct value, then the final two transformed by the auxiliary antenna
- the three-dimensional coordinate expressioncan be (X u2 , Y u2 , Z′ u2 ), that is, the three-dimensional coordinates that are originally independent of each other are transformed into two-dimensional coordinate expression by introducing a space distance.
- the amount of computation required for coordinate searchingcan be reduced. Assuming that when searching the original three-dimensional space coordinates, the search range of each component in the three-dimensional coordinates is equal and set to 1m, then the entire search interval determined for coordinate search is a three-dimensional cube, and the search volume is about 1m3 ; but if the search is performed on the two-dimensional coordinate expression of the sub-antenna, it is only necessary to search on the X and Y components at this time, the search interval is a plane, and the search area is about 1m 2 , so that the search space is reduced sharply, and the search efficiency will be reduced be significantly improved.
- Step 202setting the candidate interval expressed for the two-dimensional coordinates of the auxiliary antenna, and determining the convergence interval expressed for the two-dimensional coordinates of the auxiliary antenna;
- the optimal candidate coordinatescan be directly searched and then the fixed ambiguity can be back-calculated.
- the particle population optimization algorithmis used to search for the global optimality of the two-dimensional coordinate domain of the sub-antenna, and the optimal coordinate value is determined according to the ambiguity function method as the fitness evaluation index.
- the present applicationfirstly, as shown in FIG. 3 , it is necessary to set the candidate interval expressed for the two-dimensional coordinates of the secondary antenna, and determine the convergence interval expressed for the two-dimensional coordinates of the secondary antenna, and then according to the candidate interval and the two-dimensional
- the coordinatesexpress the ambiguity function value of the corresponding particle population, and the preset particle population optimization algorithm determines the optimal coordinate value of the optimal particle from the convergence interval.
- the candidate interval expressed by the two-dimensional coordinates of the auxiliary antennacan be determined according to the three-dimensional space coordinates of the auxiliary antenna or the coordinate prediction value after the dynamic positioning state update based on the three-dimensional space coordinates .
- the determined candidate intervalmay refer to the search interval set for the two-dimensional coordinates of the secondary antenna.
- the settingis based on the accuracy of the initial three-dimensional coordinates (X u2 , Y u2 , Z u2 ) as an example.
- the coordinate search interval for a single component in the three-dimensional space coordinates of the sub-antennacan be set, centered on the coordinates of the three-dimensional X and Y components of the sub-antenna, and the coordinate search interval is the search distance to determine the candidate interval expressed by the two-dimensional coordinates of the sub-antenna.
- the coordinate search interval of a single component in the initial three-dimensional coordinates of the auxiliary antennais set to 1m, that is, at this time, the coordinate search can be performed in a square with a side length of 1m around the initial three-dimensional X/Y component coordinates of the auxiliary antenna as the center , and the coordinates of the Z component are determined by inverse calculation based on the coordinate transformation formula based on the introduced spatial distance as constraint information.
- the determined convergence intervalcan be used to represent the coordinate range that satisfies the optimization of the particle population, that is, the coordinate range of the optimal population, then it can essentially be expressed as the convergence of the coordinate search Condition setting.
- the convergence interval expressed by the two-dimensional coordinates of the sub-antennamay be determined based on the constructed double-difference phase observation equation.
- the double-difference satellite distance value and double-difference observation value of the main and auxiliary antennascan be obtained, and the double-difference phase observation equation is constructed by using the double-difference satellite distance value and double-difference observation value of the main and auxiliary antennas. It is used for the convergence interval of coordinate search for optimal particles.
- the superscripts s1 and s2are the satellite numbers of different satellites, the subscripts u1 and u2 can be the numbers of the main and secondary antennas, and d is the distance from the satellite to the receiver antenna. This distance can be determined by satellite coordinates and antenna Approximate coordinates are calculated.
- the carrier phase double-difference observation value of multiple frequenciescan be constructed as much as possible, which is conducive to improving the distinguishability of the integer value of the integer ambiguity inversely calculated from the coordinate candidate value of the sub-antenna.
- the constructed double-difference phase observation equationcan be expressed as:
- Can be double-differenced ambiguityis the distance between two different guards, is the double-difference phase observation value, and ⁇ is the wavelength of the carrier phase.
- the formula ofcan be substituted into the double-difference phase observation equation, based on the known three-dimensional space coordinates of the main antenna u1, and according to the law of error propagation, the medium error of the ambiguity can be calculated (it is a digital standard to measure the observation accuracy, and its size is used to reflect The accuracy of the group of observations), and based on the required threshold of the centering error, determine the convergence interval for coordinate search of the preferred particles.
- the error in the ambiguityis required to be ⁇ 0.30 weeks, that is, the required threshold based on the alignment error is 0.30, and the error in the coordinate should satisfy m ⁇ 0.041m, that is, when the coordinate accuracy is within 0.041m, the coordinate
- the influence of the error on the ambiguityis not more than 0.30 weeks.
- the ambiguitycan be directly fixed by rounding off, so the convergence interval of the coordinate search can be set to 0.041m.
- Step 203Use the particle population optimization algorithm to optimize the search for the candidate coordinates of the sub-antenna, and narrow down the search space of the candidate coordinates of the sub-antenna in real time with the coordinate range of the preferred particle population until the coordinate convergence condition is satisfied, and optimize the ambiguity by outputting the preferred coordinates fixed.
- the optimal coordinate value of the preferred particleis determined from the convergence interval, and through the optimal The fixed ambiguity is obtained by inverse calculation of the candidate coordinates of , and the rapid fixation of the ambiguity is completed.
- the ambiguity function value of the corresponding particle population expressed in the candidate interval and the two-dimensional coordinatescan be obtained, and then the optimal coordinate value of the preferred particle can be determined from the convergence interval according to the ambiguity function value of the particle population and the preset particle population optimization algorithm .
- the ambiguity function value as the evaluation index of particle fitness and the optimization of particlesas shown in Figure 3, the current preferred particle can be determined according to the ambiguity function value of the particle population.
- the particle populationcan be optimized using the preset particle population optimization algorithm, and then based on the ambiguity function value of each particle in the optimized particle population, the target optimal particle can be determined from the optimized particle population and the target output Preferred coordinate values for preferred particles.
- the velocity and position of all particles in the current particle populationcan be initialized in the set candidate interval expressed for the two-dimensional coordinates of the sub-antenna, and then each particle can be calculated based on the position of each particle in the particle population
- the preliminary ambiguity function value ofsince the more accurate the candidate coordinates of the secondary antenna, the greater the ambiguity function value, at this time, the fitness of each particle can be sorted in descending order according to the preliminary ambiguity function value, and the optimal individual and the optimal group can be selected , specifically, it can be determined that the particle at the top of the list is the current preferred particle.
- the populationincludes multiple particles, each particle has a different speed and position, and each particle can consider the historical optimal point searched by itself and other particles The historical best point, constantly updating its speed and position, and finally making itself evolve towards the optimal coordinate direction, and introducing particle mutation and other operations to avoid falling into local optimum.
- the particle swarm search methodi.e., the particle population optimization algorithm
- the populationincludes multiple particles, each particle has a different speed and position, and each particle can consider the historical optimal point searched by itself and other particles The historical best point, constantly updating its speed and position, and finally making itself evolve towards the optimal coordinate direction, and introducing particle mutation and other operations to avoid falling into local optimum.
- this areais the globally optimal coordinate area.
- randis the random number of [0,1]
- v ijis the velocity value of the particle
- r ijis the position corresponding to the particle
- r 0is the initial two-dimensional coordinates of the sub-antenna.
- n iis the number of double-difference observations
- n fis the number of observation frequencies.
- the maximum velocity and maximum position of the particles in the particle populationcan be obtained value, take the maximum value of velocity and the maximum value of position as the preferred position and preferred speed of the preferred particle respectively, then use the preferred position and preferred speed of the preferred particle to update the velocities and positions of all particles in the particle population, and at this time the particle population can also be obtained
- the optimal population and optimal coordinates in the optimal populationand optimize all the particles in the optimal population along the direction of the optimal coordinates until the coordinate distribution of the particles in the optimal population satisfies the convergence interval.
- FIG. 4it shows a schematic diagram of the particle population optimization provided by the embodiment of the present application.
- the velocity and position update of a single particlecan be expressed as:
- kis the number of evolutions
- c 1 and c 2are learning factors, generally 0.5
- wis the inertia weight, which has the function of balancing wide-area search and local search.
- the speed and position of the particleare limited within a maximum value. If the speed or position of the particle exceeds the maximum value, the maximum value is taken as the update speed or update position of the particle.
- a mutation operationcan be added in the above evolution process.
- the mutationis only performed on the optimal group.
- the variation calculation formulacan be:
- Gauss(0,1)is a random number of Gaussian distribution.
- the particleswill continue to approach the optimal solution along the direction of the optimal coordinates, and at the same time the concentration of the optimal population particles (n/2) is getting higher and higher.
- the concentration of the optimal population particles (n/2)is getting higher and higher.
- the search space of the whole groupcan be narrowed until the coordinate convergence condition is satisfied.
- the position of the optimal particleis output as the candidate coordinates of the sub-antenna.
- the maximum populationcan be set
- the number of times of evolutionis a certain number of times, for example, 100 times.
- the ambiguity of the navigation systemhas an integer characteristic. After the optimal coordinate value is obtained based on the ambiguity function value that also has the integer characteristic as the fitness index output of each particle, it can be directly obtained from the candidate of the secondary antenna. Starting from the coordinates, according to the integer characteristics of the ambiguity, the optimal candidate coordinates are directly searched and then the fixed ambiguity is back-calculated.
- the optimal coordinates of the sub-antennacan be used to inversely calculate the floating-point solution of the ambiguity, and rounding is used to round the floating-point solution of the ambiguity to obtain an integer solution of the ambiguity to complete the fixation of the ambiguity.
- round()is the rounding algorithm; is the floating-point solution of ambiguity; is the fixed solution of the ambiguity.
- the two-dimensional expression of the optimal coordinates of the auxiliary antennacan be converted into three-dimensional space coordinates, and then the optimal coordinates of the auxiliary antenna and the main Antenna's double difference satellite distance value And the GNSS double-difference observations of the main and auxiliary antennas
- FIG. 5shows a schematic diagram of the time series of the fractional part of the ambiguity provided by some embodiments of the present application.
- the root mean square errorie, the medium error RMS
- RMSthe medium error
- the three-dimensional coordinates of the secondary antennasare converted into two-dimensional coordinate expressions by introducing the known geometric space distances of dual/multi-antennas, thereby directly compressing the original three-dimensional search space into a two-dimensional search space, And according to the ambiguity function method as the evaluation index, it continuously evolves and approaches the direction of the optimal candidate coordinates, and finally searches for the optimal coordinate value of the sub-antenna, and then obtains the integer solution of the ambiguity based on the optimal candidate coordinates, which reduces the coordinate search.
- the dimensionimproves the efficiency of coordinate search, and its method is not affected by the number of satellites and the cycle slip of observation values, and realizes the rapid fixation of GNSS attitude positioning ambiguity.
- FIG. 6shows a structural block diagram of an embodiment of the ambiguity fixing device of the navigation system provided by the present application, which may specifically include the following modules:
- the coordinate conversion module 601is used to obtain the space straight-line distance of the main and auxiliary antennas, and converts the three-dimensional space coordinates of the auxiliary antennas into two-dimensional coordinate expressions based on the space straight-line distances of the main and auxiliary antennas;
- the preferred coordinate value determination module 602is used to determine the preferred coordinate value for the secondary antenna from the two-dimensional coordinate expression of the secondary antenna according to the ambiguity function value expressed by the two-dimensional coordinate value of the secondary antenna;
- the ambiguity fixing module 603is used to calculate the integer solution of the ambiguity according to the preferred coordinate value of the secondary antenna, and complete the ambiguity fixing of the navigation system.
- the coordinate transformation module 601may include the following submodules:
- the coordinate conversion sub-moduleis used to obtain the three-dimensional space coordinates of the main antenna, and uses the calculation formula of the three-dimensional space distance line to inversely calculate the space line distance of the main and auxiliary antennas based on the three-dimensional space coordinates of the main and auxiliary antennas to obtain the three-dimensional space coordinates of the auxiliary antenna.
- the coordinate expression of the Z component; the coordinate expression of the Z componentis used to express the three-dimensional space coordinates of the main antenna and the X and Y component coordinates of the three-dimensional space coordinates of the auxiliary antenna.
- the preferred coordinate value determination module 602may include the following submodules:
- the interval setting sub-moduleis used to set the candidate interval expressed for the two-dimensional coordinates of the auxiliary antenna, and determine the convergence interval expressed for the two-dimensional coordinates of the auxiliary antenna; the convergence interval is used to represent the coordinate range satisfying the optimization of the particle population;
- the fuzzy function value acquisition submoduleis used to obtain the fuzzy degree function value of the particle population corresponding to the two-dimensional coordinate expression in the candidate interval;
- the optimal coordinate value determination sub-moduleis used to determine the optimal coordinate value of the optimal particle from the convergence interval according to the ambiguity function value of the particle population and the preset particle population optimization algorithm.
- the interval setting submodulemay include the following units:
- the candidate interval determination unitis configured to determine the candidate interval expressed by the two-dimensional coordinates of the auxiliary antenna according to the three-dimensional space coordinates of the auxiliary antenna or the coordinate prediction value after dynamic positioning state update based on the three-dimensional space coordinates.
- the candidate interval determination unitmay include the following subunits:
- the candidate interval determination subunitis used to set the coordinate search interval for a single component in the three-dimensional space coordinates of the auxiliary antenna, with the coordinates of the three-dimensional X and Y components of the auxiliary antenna as the center, and the coordinate search interval is the search distance.
- the interval setting submodulemay include the following units:
- the observation equation construction unitis used to obtain the double-difference satellite distance value and the double-difference observation value of the main and auxiliary antennas, and the double-difference satellite distance value and the double-difference observation value of the main and auxiliary antennas are used to construct the double-difference phase observation equation;
- the convergence interval determination unitis used to determine the convergence interval expressed for the two-dimensional coordinates of the sub-antenna according to the double-difference phase observation equation; the convergence interval is used for coordinate search of the preferred particle.
- the convergence interval determination unitmay include the following subunits:
- the convergence interval determination subunitis used to calculate the middle error of the ambiguity for the phase observation equation constructed by using the error propagation law and the three-dimensional space coordinates of the main antenna, and determine the required threshold based on the centering error for coordinate search of the preferred particle the convergence interval.
- the preferred coordinate value determination submodulemay include the following units:
- a preferred particle determination unitis used to determine the current preferred particle according to the ambiguity function value of the particle population
- the particle population optimization unitis used to optimize the particle population by using the preset particle population optimization algorithm when the coordinate distribution of the current optimal particle does not satisfy the convergence interval;
- the optimal coordinate value determining unitis configured to determine the optimal target particle from the optimized particle population based on the ambiguity function value of each particle in the optimized particle population and output the optimal coordinate value of the target optimal particle.
- the particle determination unitmay include the following subunits:
- the particle initialization subunitis used to initialize the velocity and position of all particles in the current particle population in the set candidate interval expressed for the two-dimensional coordinates of the secondary antenna;
- the ambiguity function value calculation subunitis used to calculate the preliminary ambiguity function value of each particle based on the position of each particle in the particle population;
- the optimal particle determination subunitis used to sort the fitness of each particle in descending order according to the preliminary ambiguity function value, and determine the particle at the top of the list as the current optimal particle.
- the particle population optimization submodulemay include the following units:
- a preferred value determination unitis used to obtain the maximum velocity and the maximum position of the particles in the particle population, and use the maximum velocity and the maximum position as the preferred position and preferred velocity of the preferred particles, respectively;
- a particle updating unitconfigured to update the speed and position of all particles in the particle population by using the preferred position and preferred speed of the preferred particle
- the particle population optimization unitis used to obtain the optimal population and optimal coordinates in the particle population, and optimize all the particles in the optimal population along the direction of the optimal coordinates until the coordinate distribution of the particles in the optimal population satisfies the convergence interval.
- the ambiguity fixing module 603may include the following submodules:
- the ambiguity fixing sub-moduleis used to use the preferred coordinates of the sub-antenna to obtain the ambiguity floating-point solution, and use rounding to round the ambiguity floating-point solution to obtain the ambiguity integer solution.
- the descriptionis relatively simple, and for related parts, please refer to the part of the description of the method embodiment.
- the embodiment of the present applicationalso provides a navigation module, including: a processor; a memory executable by the processor; wherein, the processor is coupled to the memory, and is used to read the program instructions stored in the memory, and in response, perform the following operate:
- the preferred coordinate value for the auxiliary antennais determined from the two-dimensional coordinate expression of the auxiliary antenna;
- the integer solution of the ambiguityis calculated according to the optimal coordinate value of the secondary antenna, and the ambiguity of the navigation system is fixed.
- Some embodiments of the present applicationalso provide a navigation device, including: a processor; a memory executable by the processor; wherein, the processor is coupled to the memory, and is used to read the program instructions stored in the memory, and in response, perform the following operate:
- the preferred coordinate value for the auxiliary antennais determined from the two-dimensional coordinate expression of the auxiliary antenna;
- the integer solution of the ambiguityis calculated according to the optimal coordinate value of the secondary antenna, and the ambiguity of the navigation system is fixed.
- Some embodiments of the present applicationalso provide a vehicle, including:
- Itincludes the ambiguity fixing device of the above-mentioned navigation system or the above-mentioned navigation chip or the above-mentioned navigation module or the above-mentioned navigation equipment, a processor, a memory, and a computer program stored on the memory and capable of running on the processor, and the computer program is executed by the processor
- a processora memory
- a computer programstored on the memory and capable of running on the processor, and the computer program is executed by the processor
- Some embodiments of the present applicationalso provide a computer-readable storage medium, on which a computer program is stored, and when the computer program is executed by a processor, each process of the embodiment of the ambiguity fixing method for the above-mentioned navigation system is implemented, and can To achieve the same technical effect, in order to avoid repetition, no more details are given here.
- embodiments of some embodiments of the present applicationmay be provided as methods, apparatuses, or computer program products. Accordingly, some embodiments of the present application may take the form of an entirely hardware embodiment, an entirely software embodiment, or an embodiment combining software and hardware aspects. Furthermore, some embodiments of the present application may take the form of a computer program product embodied on one or more computer-usable storage media (including but not limited to disk storage, CD-ROM, optical storage, etc.) having computer-usable program code embodied therein. .
- These computer program instructionsmay also be stored in a computer-readable memory capable of directing a computer or other programmable data processing terminal to operate in a specific manner, such that the instructions stored in the computer-readable memory produce an article of manufacture comprising instruction means, the The instruction means implements the functions specified in one or more procedures of the flowchart and/or one or more blocks of the block diagram.
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
Description
Translated fromChinese本申请要求在2021年12月22日提交中国专利局、申请号202111577227.9、发明名称为“一种导航系统的模糊度固定方法和装置”的中国专利申请的优先权,其全部内容通过引用结合在本申请中。This application claims the priority of a Chinese patent application filed with the China Patent Office on December 22, 2021, with application number 202111577227.9, and the title of the invention is "A Method and Device for Fixing Ambiguity of a Navigation System", the entire contents of which are hereby incorporated by reference In this application.
本申请涉及导航技术领域,特别是涉及一种导航系统的模糊度固定方法、相应的一种导航芯片、相应的一种导航设备以及相应的一种交通工具。The present application relates to the technical field of navigation, in particular to a method for fixing ambiguity of a navigation system, a corresponding navigation chip, a corresponding navigation device and a corresponding vehicle.
随着航空飞行器的发展,对导航定位系统的精度要求越来越高,其中姿态定位是导航定位系统中不可缺少的重要组成部分,其主要用于提供载体的三维姿态信息,包括航向角、俯仰角和横滚角。一般飞行器的横滚角较小,且对飞行器的飞行和控制影响较小,在实际中只架设用于确定飞行器的航向角和俯仰角的主副天线。在GNSS(Global Navigation Satellite System,全球导航定位系统)的姿态定位中,获取姿态信息的前提条件是快速实现主副天线短基线的模糊度解算,以通过短基线的三维位置矢量计算主副天线在导航坐标系下的姿态信息。With the development of aviation aircraft, the accuracy requirements for navigation and positioning systems are getting higher and higher. Attitude positioning is an indispensable and important part of navigation and positioning systems. It is mainly used to provide three-dimensional attitude information of the carrier, including heading angle, pitch angle and roll angle. Generally, the roll angle of the aircraft is small, and has little influence on the flight and control of the aircraft. In practice, only the main and auxiliary antennas for determining the heading angle and pitch angle of the aircraft are erected. In the attitude positioning of GNSS (Global Navigation Satellite System, the global navigation and positioning system), the prerequisite for obtaining attitude information is to quickly realize the ambiguity resolution of the short baseline of the main and auxiliary antennas, so as to calculate the main and auxiliary antennas through the three-dimensional position vector of the short baseline. Attitude information in the navigation coordinate system.
常用的GNSS姿态定位模糊度解算方法主要以下三种:基于观测值域的模糊度固定方法,基于模糊度域的模糊度搜索方法和基于坐标域的模糊度搜索方法,但这三种方式具有其各自的缺陷,在特殊情况下造成对模糊度的估计和固定成功率低的问题。There are three commonly used GNSS attitude positioning ambiguity resolution methods as follows: ambiguity fixation method based on observation value domain, ambiguity search method based on ambiguity domain and ambiguity search method based on coordinate domain, but these three methods have Their respective flaws cause the problem of low success rate of ambiguity estimation and fixation in special cases.
发明内容Contents of the invention
鉴于上述问题,提出了本申请实施例以便提供一种克服上述问题或者至少部分地解决上述问题的一种导航系统的模糊度固定方法、相应的一种导航芯片、相应的一种导航设备以及相应的一种交通工具。In view of the above problems, the embodiments of the present application are proposed to provide a navigation system ambiguity fixing method, a corresponding navigation chip, a corresponding navigation device and a corresponding navigation system that overcome the above problems or at least partially solve the above problems. a means of transportation.
本申请实施例公开了一种导航系统的模糊度固定方法,方法包括:The embodiment of the present application discloses a method for fixing ambiguity of a navigation system. The method includes:
获取主副天线的空间直线距离,基于主副天线的空间直线距离将副天线的三维空间坐标转换为二维坐标表达;Obtain the spatial straight-line distance of the main and auxiliary antennas, and convert the three-dimensional space coordinates of the auxiliary antennas into two-dimensional coordinate expressions based on the spatial straight-line distances of the main and auxiliary antennas;
根据副天线的二维坐标表达的模糊度函数值,从副天线的二维坐标表达中确定针对副天线的优选坐标值;According to the ambiguity function value expressed by the two-dimensional coordinates of the auxiliary antenna, the preferred coordinate value for the auxiliary antenna is determined from the two-dimensional coordinate expression of the auxiliary antenna;
根据副天线的优选坐标值计算得到模糊度的整数解,完成对导航系统的模糊度固定。The integer solution of the ambiguity is calculated according to the optimal coordinate value of the secondary antenna, and the ambiguity of the navigation system is fixed.
在本申请提出的导航系统的模糊度固定方法中,基于主副天线的空间直线距离将副天线的三维空间坐标转换为二维坐标表达,包括:In the ambiguity fixing method of the navigation system proposed in this application, the three-dimensional space coordinates of the auxiliary antenna are converted into two-dimensional coordinate expressions based on the spatial straight-line distance of the main and auxiliary antennas, including:
获取主天线的三维空间坐标,采用三维空间距离直线的计算公式将主副天线的空间直线距离基于主副天线的三维空间坐标进行反算,得到副天线的三维空间坐标中Z分量的坐标表达;Z分量的坐标表达用于采用主天线的三维空间坐标以及副天线的三维空间坐标中的X、Y分量坐标进行表示。Obtaining the three-dimensional space coordinates of the main antenna, using the calculation formula of the three-dimensional space distance line to inversely calculate the space line distance of the main and auxiliary antennas based on the three-dimensional space coordinates of the main and auxiliary antennas, and obtain the coordinate expression of the Z component in the three-dimensional space coordinates of the auxiliary antenna; The coordinate expression of the Z component is used to express by using the three-dimensional space coordinates of the main antenna and the X and Y component coordinates in the three-dimensional space coordinates of the secondary antenna.
在本申请提出的导航系统的模糊度固定方法中,根据副天线的二维坐标表达的模糊度函数值,从副天线的二维坐标表达中确定针对副天线的优选坐标值,包括:In the ambiguity fixing method of the navigation system proposed in this application, according to the ambiguity function value expressed by the two-dimensional coordinates of the auxiliary antenna, the preferred coordinate value for the auxiliary antenna is determined from the two-dimensional coordinate expression of the auxiliary antenna, including:
设置针对副天线二维坐标表达的候选区间,并确定针对副天线二维坐标表达的收敛区间;收敛区间用于表示满足粒子种群优化的坐标范围;Set the candidate interval for the expression of the two-dimensional coordinates of the auxiliary antenna, and determine the convergence interval for the expression of the two-dimensional coordinates of the auxiliary antenna; the convergence interval is used to represent the coordinate range that meets the particle population optimization;
获取在候选区间中与二维坐标表达相应粒子种群的模糊度函数值;Obtain the ambiguity function value of the particle population corresponding to the two-dimensional coordinate expression in the candidate interval;
根据粒子种群的模糊度函数值以及预设粒子种群优化算法,从收敛区间中确定优选粒子的优选坐标值。According to the ambiguity function value of the particle population and the preset particle population optimization algorithm, the optimal coordinate value of the optimal particle is determined from the convergence interval.
在本申请提出的导航系统的模糊度固定方法中,设置针对副天线二维坐标表达的候选区间,包括:In the ambiguity fixing method of the navigation system proposed in this application, the candidate interval expressed for the two-dimensional coordinates of the secondary antenna is set, including:
根据副天线的三维空间坐标或基于三维空间坐标进行动态定位状态更新后的坐标预测值,对副天线二维坐标表达的候选区间进行确定;According to the three-dimensional space coordinates of the auxiliary antenna or the coordinate prediction value after the dynamic positioning state update based on the three-dimensional space coordinates, the candidate interval expressed by the two-dimensional coordinates of the auxiliary antenna is determined;
其中,根据副天线的三维空间坐标对副天线二维坐标表达的候选区间进行确定,包括:Among them, according to the three-dimensional space coordinates of the auxiliary antenna, the candidate interval expressed by the two-dimensional coordinates of the auxiliary antenna is determined, including:
设定针对副天线的三维空间坐标中单个分量的坐标搜索区间,以副天线的三维X、Y分量的坐标为中心,坐标搜索区间为搜索距离,确定副天线二维坐标表达的候选区间。Set the coordinate search interval for a single component in the three-dimensional space coordinates of the auxiliary antenna, take the coordinates of the three-dimensional X and Y components of the auxiliary antenna as the center, and the coordinate search interval as the search distance, and determine the candidate interval expressed by the two-dimensional coordinates of the auxiliary antenna.
在本申请提出的导航系统的模糊度固定方法中,确定针对副天线二维坐 标表达的收敛区间,包括:In the ambiguity fixing method of the navigation system proposed in this application, the convergence interval expressed for the two-dimensional coordinates of the secondary antenna is determined, including:
获取主副天线的双差卫地距离值和双差观测值,采用主副天线的双差卫地距离值和双差观测值构建双差相位观测方程;Obtain the double-difference satellite distance value and double-difference observation value of the main and auxiliary antennas, and use the double-difference satellite distance value and double-difference observation value of the main and auxiliary antennas to construct a double-difference phase observation equation;
根据双差相位观测方程确定针对副天线二维坐标表达的收敛区间;收敛区间用于对优选粒子进行坐标搜索。The convergence interval expressed for the two-dimensional coordinates of the sub-antenna is determined according to the double-difference phase observation equation; the convergence interval is used for coordinate search of the optimal particle.
在本申请提出的导航系统的模糊度固定方法中,根据双差相位观测方程确定针对副天线二维坐标表达的收敛区间,包括:In the ambiguity fixing method of the navigation system proposed in this application, the convergence interval expressed for the two-dimensional coordinates of the secondary antenna is determined according to the double-difference phase observation equation, including:
采用误差传播定律和主天线的三维空间坐标,对所构建的相位观测方程计算模糊度的中误差,基于对中误差的要求阈值确定用于对优选粒子进行坐标搜索的收敛区间。The error propagation law and the three-dimensional space coordinates of the main antenna are used to calculate the median error of the ambiguity for the constructed phase observation equation, and the convergence interval for coordinate search of the preferred particle is determined based on the required threshold of the centering error.
在本申请提出的导航系统的模糊度固定方法中,根据粒子种群的模糊度函数值以及预设粒子种群优化算法,从收敛区间中确定优选粒子的优选坐标值,包括:In the ambiguity fixing method of the navigation system proposed in this application, according to the ambiguity function value of the particle population and the preset particle population optimization algorithm, the optimal coordinate value of the preferred particle is determined from the convergence interval, including:
根据粒子种群的模糊度函数值确定当前的优选粒子;Determine the current preferred particle according to the ambiguity function value of the particle population;
若当前的优选粒子的坐标分布不满足收敛区间,则采用预设粒子种群优选算法对粒子种群进行优化;If the coordinate distribution of the current optimal particle does not satisfy the convergence interval, the particle population is optimized using the preset particle population optimization algorithm;
基于优化后的粒子种群中各个粒子的模糊度函数值,从优化后的粒子种群中确定目标优选粒子并输出目标优选粒子的优选坐标值。Based on the ambiguity function value of each particle in the optimized particle population, the optimal particle of the target is determined from the optimized particle population and the optimal coordinate value of the optimal particle of the target is output.
在本申请提出的导航系统的模糊度固定方法中,根据粒子种群的模糊度函数值确定当前的优选粒子,包括:In the ambiguity fixing method of the navigation system proposed in this application, the current preferred particle is determined according to the ambiguity function value of the particle population, including:
在所设置的针对副天线二维坐标表达的候选区间中,初始化当前粒子种群中所有粒子的速度和位置;In the set candidate interval expressed for the two-dimensional coordinates of the secondary antenna, initialize the velocity and position of all particles in the current particle population;
基于粒子种群中各个粒子的位置计算各个粒子的初步模糊度函数值;calculating the preliminary ambiguity function value of each particle based on the position of each particle in the particle population;
按照初步模糊度函数值对各个粒子的适应度进行降序排序,确定位于排序在首位的粒子为当前的优选粒子。According to the preliminary ambiguity function value, the fitness of each particle is sorted in descending order, and the particle at the top of the list is determined to be the current preferred particle.
在设定的副天线坐标候选区间内,初始化所有粒子的速度和位置,然后根据粒子的位置,计算对应的模糊度函数值,由于副天线的候选坐标越精确模糊度函数值越大,此时根据初步的模糊度函数值对各个粒子的适应度进行 降序排序,选出最优个体和最优群体。In the set sub-antenna coordinate candidate interval, initialize the velocity and position of all particles, and then calculate the corresponding ambiguity function value according to the position of the particle, because the more accurate the candidate coordinates of the sub-antenna, the greater the ambiguity function value, at this time According to the preliminary ambiguity function value, the fitness of each particle is sorted in descending order, and the optimal individual and the optimal group are selected.
在本申请提出的导航系统的模糊度固定方法中,采用预设粒子种群优选算法对粒子种群进行优化,包括:In the ambiguity fixing method of the navigation system proposed in this application, the particle population is optimized by using the preset particle population optimization algorithm, including:
获取粒子种群中粒子的速度最大值和位置最大值,分别将速度最大值和位置最大值作为优选粒子的优选位置和优选速度;Obtain the maximum velocity and maximum position of the particles in the particle population, and use the maximum velocity and maximum position as the preferred position and preferred velocity of the preferred particles, respectively;
采用优选粒子的优选位置和优选速度更新粒子种群中所有粒子的速度与位置;Update the speed and position of all particles in the particle population by using the preferred position and preferred speed of the preferred particle;
获取粒子种群中的优选种群以及优选坐标,并对优选种群中所有粒子沿着优选坐标方向进行优化,直至使得优选种群中粒子的坐标分布满足收敛区间为止。Obtain the optimal population and optimal coordinates in the particle population, and optimize all the particles in the optimal population along the direction of the optimal coordinates until the coordinate distribution of the particles in the optimal population satisfies the convergence interval.
本申请实施例还公开了一种导航系统的模糊度固定装置,装置包括:The embodiment of the present application also discloses a device for fixing ambiguity of a navigation system, which includes:
坐标转换模块,用于获取主副天线的空间直线距离,基于主副天线的空间直线距离将副天线的三维空间坐标转换为二维坐标表达;The coordinate conversion module is used to obtain the space straight-line distance of the main and auxiliary antennas, and convert the three-dimensional space coordinates of the auxiliary antennas into two-dimensional coordinate expressions based on the space straight-line distances of the main and auxiliary antennas;
优选坐标值确定模块,用于根据副天线的二维坐标表达的模糊度函数值,从副天线的二维坐标表达中确定针对副天线的优选坐标值;The preferred coordinate value determination module is used to determine the preferred coordinate value for the secondary antenna from the two-dimensional coordinate expression of the secondary antenna according to the ambiguity function value expressed by the two-dimensional coordinate value of the secondary antenna;
模糊度固定模块,用于根据副天线的优选坐标值计算得到模糊度的整数解,完成对导航系统的模糊度固定。The ambiguity fixing module is used to calculate the integer solution of the ambiguity according to the optimal coordinate value of the secondary antenna, and complete the ambiguity fixing of the navigation system.
在本申请提出的导航系统的模糊度固定装置中,坐标转换模块包括:In the ambiguity fixing device of the navigation system proposed in this application, the coordinate conversion module includes:
坐标转换子模块,用于获取主天线的三维空间坐标,采用三维空间距离直线的计算公式将主副天线的空间直线距离基于主副天线的三维空间坐标进行反算,得到副天线的三维空间坐标中Z分量的坐标表达;Z分量的坐标表达用于采用主天线的三维空间坐标以及副天线的三维空间坐标中的X、Y分量坐标进行表示。The coordinate conversion sub-module is used to obtain the three-dimensional space coordinates of the main antenna, and uses the calculation formula of the three-dimensional space distance line to inversely calculate the space line distance of the main and auxiliary antennas based on the three-dimensional space coordinates of the main and auxiliary antennas to obtain the three-dimensional space coordinates of the auxiliary antenna The coordinate expression of the Z component; the coordinate expression of the Z component is used to express the three-dimensional space coordinates of the main antenna and the X and Y component coordinates of the three-dimensional space coordinates of the auxiliary antenna.
在本申请提出的导航系统的模糊度固定装置中,优选坐标值确定模块包括:In the ambiguity fixing device of the navigation system proposed in the present application, the preferred coordinate value determination module includes:
区间设定子模块,用于设置针对副天线二维坐标表达的候选区间,并确定针对副天线二维坐标表达的收敛区间;收敛区间用于表示满足粒子种群优 化的坐标范围;The interval setting sub-module is used to set the candidate interval for the expression of the two-dimensional coordinates of the auxiliary antenna, and determine the convergence interval for the expression of the two-dimensional coordinates of the auxiliary antenna; the convergence interval is used to represent the coordinate range that meets the optimization of the particle population;
模糊函数值获取子模块,用于获取在候选区间中与二维坐标表达相应粒子种群的模糊度函数值;The fuzzy function value acquisition submodule is used to obtain the fuzzy degree function value of the particle population corresponding to the two-dimensional coordinate expression in the candidate interval;
优选坐标值确定子模块,用于根据粒子种群的模糊度函数值以及预设粒子种群优化算法,从收敛区间中确定优选粒子的优选坐标值。The optimal coordinate value determination sub-module is used to determine the optimal coordinate value of the optimal particle from the convergence interval according to the ambiguity function value of the particle population and the preset particle population optimization algorithm.
在本申请提出的导航系统的模糊度固定装置中,区间设定子模块包括:In the ambiguity fixing device of the navigation system proposed in this application, the interval setting submodule includes:
候选区间确定单元,用于根据副天线的三维空间坐标或基于三维空间坐标进行动态定位状态更新后的坐标预测值,对副天线二维坐标表达的候选区间进行确定。The candidate interval determination unit is configured to determine the candidate interval expressed by the two-dimensional coordinates of the auxiliary antenna according to the three-dimensional space coordinates of the auxiliary antenna or the coordinate prediction value after dynamic positioning state update based on the three-dimensional space coordinates.
在本申请提出的导航系统的模糊度固定装置中,候选区间确定单元包括:In the ambiguity fixing device of the navigation system proposed in this application, the candidate interval determination unit includes:
候选区间确定子单元,用于设定针对副天线的三维空间坐标中单个分量的坐标搜索区间,以副天线的三维X、Y分量的坐标为中心,坐标搜索区间为搜索距离,确定副天线二维坐标表达的候选区间。The candidate interval determination subunit is used to set the coordinate search interval for a single component in the three-dimensional space coordinates of the auxiliary antenna, with the coordinates of the three-dimensional X and Y components of the auxiliary antenna as the center, and the coordinate search interval is the search distance. Candidate intervals expressed by dimensional coordinates.
在本申请提出的导航系统的模糊度固定装置中,区间设定子模块包括:In the ambiguity fixing device of the navigation system proposed in this application, the interval setting submodule includes:
观测方程构建单元,用于获取主副天线的双差卫地距离值和双差观测值,采用主副天线的双差卫地距离值和双差观测值构建双差相位观测方程;The observation equation construction unit is used to obtain the double-difference satellite distance value and the double-difference observation value of the main and auxiliary antennas, and the double-difference satellite distance value and the double-difference observation value of the main and auxiliary antennas are used to construct the double-difference phase observation equation;
收敛区间确定单元,用于根据双差相位观测方程确定针对副天线二维坐标表达的收敛区间;收敛区间用于对优选粒子进行坐标搜索。The convergence interval determination unit is used to determine the convergence interval expressed for the two-dimensional coordinates of the sub-antenna according to the double-difference phase observation equation; the convergence interval is used for coordinate search of the preferred particle.
在本申请提出的导航系统的模糊度固定装置中,收敛区间确定单元包括:In the ambiguity fixing device of the navigation system proposed in this application, the convergence interval determination unit includes:
收敛区间确定子单元,用于采用误差传播定律和主天线的三维空间坐标,对所构建的相位观测方程计算模糊度的中误差,基于对中误差的要求阈值确定用于对优选粒子进行坐标搜索的收敛区间。The convergence interval determination subunit is used to calculate the middle error of the ambiguity for the phase observation equation constructed by using the error propagation law and the three-dimensional space coordinates of the main antenna, and determine the required threshold based on the centering error for coordinate search of the preferred particle the convergence interval.
在本申请提出的导航系统的模糊度固定装置中,优选坐标值确定子模块包括:In the ambiguity fixing device of the navigation system proposed in the present application, the preferred coordinate value determination submodule includes:
优选粒子确定单元,用于根据粒子种群的模糊度函数值确定当前的优选粒子;A preferred particle determination unit is used to determine the current preferred particle according to the ambiguity function value of the particle population;
粒子种群优单元,用于在当前的优选粒子的坐标分布不满足收敛区间时,采用预设粒子种群优选算法对粒子种群进行优化;The particle population optimal unit is used to optimize the particle population by using the preset particle population optimization algorithm when the coordinate distribution of the current optimal particle does not meet the convergence interval;
优选坐标值确定单元,用于基于优化后的粒子种群中各个粒子的模糊度函数值,从优化后的粒子种群中确定目标优选粒子并输出目标优选粒子的优选坐标值。The optimal coordinate value determining unit is configured to determine the optimal target particle from the optimized particle population based on the ambiguity function value of each particle in the optimized particle population and output the optimal coordinate value of the target optimal particle.
在本申请提出的导航系统的模糊度固定装置中,优选粒子确定单元包括:In the ambiguity fixing device of the navigation system proposed in this application, preferably, the particle determination unit includes:
粒子初始化子单元,用于在所设置的针对副天线二维坐标表达的候选区间中,初始化当前粒子种群中所有粒子的速度和位置;The particle initialization subunit is used to initialize the velocity and position of all particles in the current particle population in the set candidate interval expressed for the two-dimensional coordinates of the secondary antenna;
模糊度函数值计算子单元,用于基于粒子种群中各个粒子的位置计算各个粒子的初步模糊度函数值;The ambiguity function value calculation subunit is used to calculate the preliminary ambiguity function value of each particle based on the position of each particle in the particle population;
优选粒子确定子单元,用于按照初步模糊度函数值对各个粒子的适应度进行降序排序,确定位于排序在首位的粒子为当前的优选粒子。The optimal particle determination subunit is used to sort the fitness of each particle in descending order according to the preliminary ambiguity function value, and determine the particle at the top of the list as the current optimal particle.
在本申请提出的导航系统的模糊度固定装置中,粒子种群优化子模块包括:In the ambiguity fixing device of the navigation system proposed in this application, the particle population optimization sub-module includes:
优选值确定单元,用于获取粒子种群中粒子的速度最大值和位置最大值,分别将速度最大值和位置最大值作为优选粒子的优选位置和优选速度;A preferred value determination unit is used to obtain the maximum velocity and the maximum position of the particles in the particle population, and use the maximum velocity and the maximum position as the preferred position and preferred velocity of the preferred particles, respectively;
粒子更新单元,用于采用优选粒子的优选位置和优选速度更新粒子种群中所有粒子的速度与位置;A particle updating unit, configured to update the speed and position of all particles in the particle population by using the preferred position and preferred speed of the preferred particle;
粒子种群优化单元,用于获取粒子种群中的优选种群以及优选坐标,并对优选种群中所有粒子沿着优选坐标方向进行优化,直至使得优选种群中粒子的坐标分布满足收敛区间为止。The particle population optimization unit is used to obtain the optimal population and optimal coordinates in the particle population, and optimize all the particles in the optimal population along the direction of the optimal coordinates until the coordinate distribution of the particles in the optimal population satisfies the convergence interval.
本申请实施例还公开了一种导航芯片,包括:处理器;存储处理器可执行的存储器;其中,处理器耦合于存储器,用于读取存储器存储的程序指令,并作为响应,执行任一项导航系统的模糊度固定方法。The embodiment of the present application also discloses a navigation chip, including: a processor; a memory executable by the processor; wherein, the processor is coupled to the memory, and is used to read the program instructions stored in the memory, and in response, execute any Ambiguity Fixing Methods for Item Navigation Systems.
本申请实施例还公开了一种导航模组,包括:处理器;存储处理器可执行的存储器;其中,处理器耦合于存储器,用于读取存储器存储的程序指令, 并作为响应,执行任一项导航系统的模糊度固定方法。The embodiment of the present application also discloses a navigation module, including: a processor; a memory executable by the processor; wherein, the processor is coupled to the memory, and is used to read the program instructions stored in the memory, and in response, execute any An ambiguity fixation method for navigation systems.
本申请实施例还公开了一种导航设备,包括:处理器;存储处理器可执行的存储器;其中,处理器耦合于存储器,用于读取存储器存储的程序指令,并作为响应,执行任一项导航系统的模糊度固定方法。The embodiment of the present application also discloses a navigation device, including: a processor; a memory that stores the executable memory of the processor; wherein, the processor is coupled to the memory, and is used to read the program instructions stored in the memory, and in response, execute any Ambiguity Fixing Methods for Item Navigation Systems.
本申请实施例还公开了一种交通工具,包括:导航系统的模糊度固定装置或上述导航芯片或上述导航模组或上述导航设备、处理器、存储器及存储在存储器上并能够在处理器上运行的计算机程序,计算机程序被处理器执行时实现任一项导航系统的模糊度固定方法。The embodiment of the present application also discloses a vehicle, including: the ambiguity fixing device of the navigation system or the above-mentioned navigation chip or the above-mentioned navigation module or the above-mentioned navigation equipment, a processor, a memory, and a device stored on the memory and capable of being stored on the processor The running computer program, when the computer program is executed by the processor, realizes the ambiguity fixing method of any navigation system.
本申请实施例还公开了一种计算机可读存储介质,计算机可读存储介质上存储计算机程序,计算机程序被处理器执行时实现任一项导航系统的模糊度固定方法。The embodiment of the present application also discloses a computer-readable storage medium, on which a computer program is stored, and when the computer program is executed by a processor, any method for fixing ambiguity of a navigation system is realized.
本申请实施例包括以下优点:The embodiment of the present application includes the following advantages:
在本申请一些实施例中,通过引入已知的双/多天线的几何空间距离,将副天线的三维坐标转换为二维坐标表达,由此将原三维搜索空间直接压缩为二维搜索空间,并依据模糊度函数法作为评价指标,不断朝向最优候选坐标的方向进化和靠拢,最终搜索得到副天线的优选坐标值,然后基于优选候选坐标反算得到模糊度的整数解,降低了坐标搜索的维度,提升了坐标搜索的效率,且其方式不受卫星个数和观测值周跳的影响,实现GNSS姿态定位模糊度的快速固定。In some embodiments of the present application, the three-dimensional coordinates of the secondary antennas are converted into two-dimensional coordinate expressions by introducing the known geometric space distances of dual/multi-antennas, thereby directly compressing the original three-dimensional search space into a two-dimensional search space, And according to the ambiguity function method as the evaluation index, it continuously evolves and approaches the direction of the optimal candidate coordinates, and finally searches for the optimal coordinate value of the sub-antenna, and then obtains the integer solution of the ambiguity based on the optimal candidate coordinates, which reduces the coordinate search. The dimension improves the efficiency of coordinate search, and its method is not affected by the number of satellites and the cycle slip of observation values, and realizes the rapid fixation of GNSS attitude positioning ambiguity.
图1是本申请提供的导航系统的模糊度固定方法实施例的步骤流程图;Fig. 1 is a flow chart of the steps of the embodiment of the ambiguity fixing method of the navigation system provided by the present application;
图2是本申请提供的导航系统的模糊度固定方法实施例的另一种步骤流程图;Fig. 2 is another flow chart of the steps of the embodiment of the ambiguity fixing method of the navigation system provided by the present application;
图3是本申请实施例提供的导航系统的模糊度固定的流程示意图;Fig. 3 is a schematic flow chart of the ambiguity fixing of the navigation system provided by the embodiment of the present application;
图4是本申请实施例提供的粒子种群优化的示意图;Fig. 4 is a schematic diagram of the particle population optimization provided by the embodiment of the present application;
图5是本申请实施例提供的模糊度小数部分的时间序列的示意图;Fig. 5 is a schematic diagram of the time series of the fractional part of the ambiguity provided by the embodiment of the present application;
图6是本申请提供的导航系统的模糊度固定装置实施例的结构框图。Fig. 6 is a structural block diagram of an embodiment of an apparatus for fixing ambiguity in a navigation system provided by the present application.
为使本申请的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本申请作进一步详细的说明。In order to make the above objects, features and advantages of the present application more obvious and comprehensible, the present application will be further described in detail below in conjunction with the accompanying drawings and specific implementation methods.
在双天线GMSS中,正确快速地固定整周模糊度能使GNSS的定位精度到达厘米甚至毫米级,使得卫星至用户的距离测定更为精确。In dual-antenna GMSS, correct and rapid fixation of the ambiguity can make the positioning accuracy of GNSS reach the centimeter or even millimeter level, making the distance measurement from the satellite to the user more accurate.
常用的GNSS姿态定位模糊度解算方法,主要可以包括基于观测值域的模糊度固定方法,基于模糊度域的模糊度搜索方法和基于坐标域的模糊度搜索方法这三种方式。Commonly used GNSS attitude positioning ambiguity resolution methods mainly include three methods: the ambiguity fixing method based on the observation value domain, the ambiguity search method based on the ambiguity domain, and the ambiguity search method based on the coordinate domain.
具体的,第一种基于观测值域的模糊度固定方法。其主要通过直接利用C/A码或P码伪距(C/A码和P码都属于伪随机码,调制在导航卫星信号的载波的波段上)确定整周模糊度,由于伪距观测值精度较低,常采用多种频率观测值进行组合的方式来固定模糊度,但是实际固定成功率较低。Specifically, the first ambiguity fixing method based on the observation range. It mainly determines the integer ambiguity by directly using the C/A code or P code pseudo-range (C/A code and P code are both pseudo-random codes, modulated on the carrier wave band of the navigation satellite signal), because the pseudo-range observation value The accuracy is low, and the combination of multiple frequency observations is often used to fix the ambiguity, but the actual fixation success rate is low.
第二种基于模糊度域的模糊度搜索方法,首先可以采用整数最小二乘估计理论估计模糊度参数的浮点解,再使用降相关和各种搜索方法固定模糊度的整数解,其中较为常用的方法是最小二乘降相关方法(LAMBDA,Leastsquare AMBiguity Decorrelation Adjustment,是一种被广泛采用的模糊度固定方法)。该类模糊度固定方法严重依赖模糊度浮点解及其协方差矩阵的精度,在卫星个数较少或观测值噪声较大时,模糊度浮点解精度较低,无法正确固定模糊度,特别是在卫星个数不足四颗时,无法实现模糊度的估计和固定,同时该类方法会受到观测值周跳的影响,无法准确修复周跳时,需要重新初始化新的模糊度。The second ambiguity search method based on the ambiguity domain, firstly, the integer least squares estimation theory can be used to estimate the floating-point solution of the ambiguity parameters, and then the integer solution of the ambiguity can be fixed by using descending correlation and various search methods, among which The most common method is the least squares descending correlation method (LAMBDA, Leastsquare AMBiguity Decorrelation Adjustment, which is a widely used ambiguity fixing method). This type of ambiguity fixing method relies heavily on the accuracy of the ambiguity floating-point solution and its covariance matrix. When the number of satellites is small or the observation value is noisy, the ambiguity floating-point solution has low precision and cannot correctly fix the ambiguity. Especially when the number of satellites is less than four, it is impossible to estimate and fix the ambiguity. At the same time, this type of method will be affected by the cycle slip of the observation value. When the cycle slip cannot be accurately repaired, a new ambiguity needs to be re-initialized.
第三种基于坐标域的模糊度搜索方法,主要是利用模糊度的整数特性,通过搜索三维坐标来反算整数模糊度,其中候选坐标越接近于真值,反算的模糊度值越接近于整数。不同于第一种和第二种方式,卫星个数较少或观测噪声较大都不显著影响该方法的性能,且该方法对观测值周跳不敏感,可回避周跳探测与修复的问题,但其所进行的坐标搜索主要是针对流动站的三维坐标进行搜索,计算量较大因而不利于实际应用。The third ambiguity search method based on the coordinate field mainly uses the integer characteristics of ambiguity to inversely calculate the integer ambiguity by searching three-dimensional coordinates. The closer the candidate coordinates are to the true value, the closer the inverse calculated ambiguity value is to integer. Different from the first and second methods, the performance of the method is not significantly affected by the small number of satellites or the large observation noise, and the method is not sensitive to the cycle slip of the observation value, which can avoid the problem of cycle slip detection and repair. However, the coordinate search is mainly for the three-dimensional coordinates of the mobile station, and the calculation amount is large, which is not conducive to practical application.
本申请一些实施例的核心思想之一在于将传统坐标搜索方法与GNSS姿态定位的特点相结合,通过将主副天线的空间距离作为约束条件,将副天 线的三维位置转换为二维的坐标表达,采用粒子种群优化算法对副天线的候选坐标进行二维最优搜索,并依据AFM(Ambiguity Function Method,模糊度函数法,是利用模糊度的整数特性来确定模糊度的方法)作为评价指标确定副天线的最优位置,并基于最优位置直接反算模糊度的整数解,从而实现GNSS姿态定位模糊度的快速固定,降低了坐标搜索的维度,提升了坐标搜索的效率,且其方式不受卫星个数和观测值周跳的影响,不仅可作为传统模糊度域搜索方法的补充,也可直接用于GNSS姿态定位的模糊度固定。One of the core ideas of some embodiments of the present application is to combine the traditional coordinate search method with the characteristics of GNSS attitude positioning, and convert the three-dimensional position of the auxiliary antenna into a two-dimensional coordinate expression by using the spatial distance of the main and auxiliary antennas as a constraint condition , use the particle population optimization algorithm to search for the two-dimensional optimal coordinates of the sub-antenna candidates, and use the AFM (Ambiguity Function Method, ambiguity function method, which is a method of determining the ambiguity by using the integer characteristics of the ambiguity) as the evaluation index to determine The optimal position of the sub-antenna, and the integer solution of the ambiguity is directly back-calculated based on the optimal position, so as to realize the fast fixation of the ambiguity of GNSS attitude positioning, reduce the dimension of coordinate search, and improve the efficiency of coordinate search. Affected by the number of satellites and the cycle slip of observations, it can not only be used as a supplement to the traditional ambiguity domain search method, but also can be directly used for ambiguity fixation of GNSS attitude positioning.
参照图1,示出了本申请提供的导航系统的模糊度固定方法实施例的步骤流程图,具体可以包括如下步骤:Referring to FIG. 1 , it shows a flow chart of steps of an embodiment of a method for fixing ambiguity of a navigation system provided by the present application, which may specifically include the following steps:
步骤101,获取主副天线的空间直线距离,基于主副天线的空间直线距离将副天线的三维空间坐标转换为二维坐标表达;
在本申请一些实施例中,通过将传统坐标搜索方法与GNSS姿态定位的特点相结合,完成对模糊度的快速固定。In some embodiments of the present application, the rapid fixation of ambiguity is accomplished by combining the traditional coordinate search method with the characteristics of GNSS attitude positioning.
对GNSS姿态定位的特点的结合,主要可以表现在双天线GNSS姿态定位中,将已知的双天线空间直线距离作为主副天线坐标参数的约束信息,具体将原副天线的三维空间坐标转换为二维的坐标表达,由此可将传统坐标搜索方法中的原三维搜索空间直接压缩为二维搜索空间,降低坐标搜索时所需的计算量,提高坐标搜索的实际应用率。The combination of the characteristics of GNSS attitude positioning can be mainly manifested in the dual-antenna GNSS attitude positioning. The known spatial linear distance of the dual antennas is used as the constraint information of the coordinate parameters of the main and auxiliary antennas. Specifically, the three-dimensional space coordinates of the original and auxiliary antennas are converted into Two-dimensional coordinate expression, so that the original three-dimensional search space in the traditional coordinate search method can be directly compressed into a two-dimensional search space, reducing the amount of calculation required for coordinate search and improving the actual application rate of coordinate search.
步骤102,根据副天线的二维坐标表达的模糊度函数值,从副天线的二维坐标表达中确定针对副天线的优选坐标值;
在将副天线的三维空间坐标转换为二维坐标表达的基础上,可以采用粒子种群优化算法对副天线的二维坐标域进行全局最优搜索,并依据模糊度函数法作为适应度评价指标确定优选坐标值,即通过计算副天线的二维坐标表达的模糊度函数值,基于所计算得到的各个二维坐标表达的模糊度函数值,从副天线的二维坐标表达中确定针对副天线的优选坐标值,以基于所输出的坐标值确定导航系统的模糊度。On the basis of converting the three-dimensional space coordinates of the sub-antenna into two-dimensional coordinates, the particle population optimization algorithm can be used to search for the global optimality of the two-dimensional coordinate domain of the sub-antenna, and the fitness evaluation index can be determined according to the ambiguity function method Optimal coordinate values, that is, by calculating the ambiguity function value expressed by the two-dimensional coordinates of the secondary antenna, based on the calculated ambiguity function values expressed by each two-dimensional coordinate, determine the ambiguity function value for the secondary antenna from the two-dimensional coordinate expression of the secondary antenna The coordinate values are optimized to determine the ambiguity of the navigation system based on the output coordinate values.
其中,所采用的粒子种群优化算法可以表现为粒子群搜索方法,具体 的,种群中包括多个粒子,每个粒子具有不同的速度和位置,每个粒子可以考虑自身搜索到的历史最优点和其它粒子的历史最优点,不断更新自己的速度和位置,最终使自己朝着坐标最优的方向不断进化,为避免陷入局部最优引入粒子变异等操作,即此时能够找到最优的粒子个体极值作为整个粒子群的当前全局最优解,将此全局最优解作为可用于固定模糊度的优选坐标值。Among them, the particle swarm optimization algorithm adopted can be expressed as a particle swarm search method. Specifically, the population includes multiple particles, each particle has a different speed and position, and each particle can consider its own searched historical optimal point and The best points in the history of other particles, constantly updating their speed and position, and finally making themselves evolve towards the direction of optimal coordinates, in order to avoid falling into local optimum, introduce particle mutation and other operations, that is, at this time, the optimal particle individual can be found The extremum is the current global optimal solution of the entire particle swarm, and this global optimal solution is used as the optimal coordinate value that can be used to fix the ambiguity.
需要说明的是,在对副天线的二维坐标进行最优搜索时除了采用粒子群优化算法以外,还可以采用改进遗传算法等智能优化算法,不同的算法具体实现步骤不同,但其原理均是依据模糊度函数法作为评价指标,不断朝向最优候选坐标的方向进化和靠拢,最终搜索得到最优坐标值。其中,相较于其它智能优化方法,本申请一些实施例所采用的粒子群优化方法的搜索效率最高。对于对副天线的二维坐标进行最优搜索的方法,本申请一些实施例不加以限制。It should be noted that, in addition to the particle swarm optimization algorithm, intelligent optimization algorithms such as improved genetic algorithm can be used in the optimal search of the two-dimensional coordinates of the sub-antenna. Different algorithms have different specific implementation steps, but the principles are the same According to the ambiguity function method as the evaluation index, it continuously evolves and moves towards the direction of the optimal candidate coordinates, and finally searches to obtain the optimal coordinate value. Among them, compared with other intelligent optimization methods, the particle swarm optimization method adopted in some embodiments of the present application has the highest search efficiency. Some embodiments of the present application do not limit the optimal search method for the two-dimensional coordinates of the secondary antenna.
步骤103,根据副天线的优选坐标值计算得到模糊度的整数解,完成对导航系统的模糊度固定。In
导航系统的模糊度具有整数特性,在基于同样具有整数特性的模糊度函数值作为各个粒子的适应度指标输出得到优选坐标值后,可以直接从副天线的候选坐标出发,依据模糊度的整数特性,直接搜索最优的候选坐标再反算固定模糊度,在不需要采用伪距观测值的情况下不受伪距噪声的影响,同时也适用于单频/双频/多频观测值的模糊度固定,且基本不受卫星个数的影响,即便存在由于卫星个数较少将会影响模糊度函数值的计算精度以及可区分度而导致模糊度搜索性能降低的问题,但基于对周跳不敏感的特性不需要进行周跳探测和修复工作,特别是在观测环境复杂且观测值周跳较多时,能够进一步提高坐标域模糊度的搜索效率。The ambiguity of the navigation system has integer characteristics. After the optimal coordinate value is obtained based on the ambiguity function value that also has integer characteristics as the fitness index output of each particle, it can be directly started from the candidate coordinates of the secondary antenna. According to the integer characteristics of the ambiguity , directly search for the optimal candidate coordinates and then inversely calculate the fixed ambiguity, which is not affected by pseudo-range noise without using pseudo-range observations, and is also applicable to the ambiguity of single-frequency/dual-frequency/multi-frequency observations The degree of ambiguity is fixed and is basically not affected by the number of satellites. Even if there is a problem that the performance of ambiguity search will decrease due to the fact that the small number of satellites will affect the calculation accuracy and distinguishability of the ambiguity function value, but based on the cycle slip The insensitive feature does not require cycle slip detection and repair work, especially when the observation environment is complex and there are many cycle slips in the observation value, it can further improve the search efficiency of the ambiguity in the coordinate domain.
在实际应用中,可采用副天线的优选坐标反算得到模糊度浮点解,并采用四舍五入对模糊度浮点解进行取整,得到模糊度的整数解,完成对模糊度的固定。In practical applications, the optimal coordinates of the sub-antenna can be inversely calculated to obtain the floating-point solution of the ambiguity, and the floating-point solution of the ambiguity can be rounded to obtain an integer solution of the ambiguity to complete the fixation of the ambiguity.
在本申请一些实施例中,通过引入已知的双/多天线的几何空间距离,将副天线的三维坐标转换为二维坐标表达,由此将原三维搜索空间直接压缩为 二维搜索空间,并依据模糊度函数法作为评价指标,不断朝向最优候选坐标的方向进化和靠拢,最终搜索得到副天线的优选坐标值,然后基于优选候选坐标反算得到模糊度的整数解,降低了坐标搜索的维度,提升了坐标搜索的效率,且其方式不受卫星个数和观测值周跳的影响,实现GNSS姿态定位模糊度的快速固定。In some embodiments of the present application, the three-dimensional coordinates of the secondary antennas are converted into two-dimensional coordinate expressions by introducing the known geometric space distances of dual/multi-antennas, thereby directly compressing the original three-dimensional search space into a two-dimensional search space, And according to the ambiguity function method as the evaluation index, it continuously evolves and approaches the direction of the optimal candidate coordinates, and finally searches for the optimal coordinate value of the sub-antenna, and then obtains the integer solution of the ambiguity based on the optimal candidate coordinates, which reduces the coordinate search. The dimension improves the efficiency of coordinate search, and its method is not affected by the number of satellites and the cycle slip of observation values, and realizes the rapid fixation of GNSS attitude positioning ambiguity.
参照图2,示出了本申请提供的导航系统的模糊度固定方法实施例的另一种步骤流程图,具体可以包括如下步骤:Referring to FIG. 2 , it shows another flow chart of the steps of the embodiment of the ambiguity fixing method of the navigation system provided by the present application, which may specifically include the following steps:
步骤201,基于主副天线的空间直线距离将副天线的三维空间坐标转换为二维坐标表达;
在本申请一些实施例中,可将已知的双天线空间直线距离作为主副天线坐标参数的约束信息,将原副天线的三维空间坐标转换为二维的坐标表达,由此可将传统坐标搜索方法中的原三维搜索空间直接压缩为二维搜索空间,降低坐标搜索时所需的计算量,提高坐标搜索的实际应用率。In some embodiments of the present application, the known two-antenna spatial straight-line distance can be used as the constraint information of the coordinate parameters of the main and auxiliary antennas, and the three-dimensional space coordinates of the original and auxiliary antennas can be converted into two-dimensional coordinate expressions, so that the traditional coordinates The original three-dimensional search space in the search method is directly compressed into a two-dimensional search space, which reduces the amount of calculation required for coordinate search and improves the actual application rate of coordinate search.
对主副天线坐标参数的约束信息,如图3所示,主要是结合已知的主副天线的空间直线距离,建立副天线三维坐标的二维表达。具体的,此时可采用三维空间距离直线的计算公式将主副天线的空间直线距离基于主副天线的三维空间坐标进行反算,得到副天线的三维空间坐标中Z分量的坐标表达,即采用主天线的三维空间坐标以及副天线的三维空间坐标中的X、Y分量坐标对Z分量的坐标表达进行表示。The constraint information on the coordinate parameters of the main and auxiliary antennas, as shown in Figure 3, is mainly to establish the two-dimensional expression of the three-dimensional coordinates of the auxiliary antennas by combining the known spatial straight-line distances of the main and auxiliary antennas. Specifically, at this time, the calculation formula of the three-dimensional space distance line can be used to inversely calculate the space line distance of the main and auxiliary antennas based on the three-dimensional space coordinates of the main and auxiliary antennas, and obtain the coordinate expression of the Z component in the three-dimensional space coordinates of the auxiliary antenna, that is, use The three-dimensional space coordinates of the main antenna and the coordinates of the X and Y components in the three-dimensional space coordinates of the auxiliary antenna represent the coordinate expression of the Z component.
示例性地,假设已知的主副天线的空间直线距离为dS,主u1、副天线u2的三维空间坐标分别可以表示为(Xu1,Yu1,Zu1)和(Xu2,Yu2,Zu2)。那么基于采用三维空间距离直线的计算公式进行空间直线距离的反算后,副天线的Z分量坐标可表示为:For example, assuming that the known space straight-line distance of the main and auxiliary antennas is dS, the three-dimensional space coordinates of the main u1 and the auxiliary antenna u2 can be expressed as (Xu1 , Yu1 , Zu1 ) and (Xu2 , Yu2 , Zu2 ). Then, based on the calculation formula of the three-dimensional space distance straight line, the Z component coordinates of the secondary antenna can be expressed as:
Z′u2=Zu1±Sqrt(dS2-(Xu1-Xu2)2-(Yu1-Yu2)2)Z′u2 =Zu1 ±Sqrt(dS2 -(Xu1 -Xu2 )2 -(Yu1 -Yu2 )2 )
式中,Sqrt()可以为平方根函数。满足上式的计算结果有两个,其中可以采用距离副天线的原始三维坐标(Xu2,Yu2,Zu2)距离较近的Z′u2为正确值,那么最终针对副天线所转换的二维坐标表达可以为(Xu2,Yu2,Z′u2),即将原本相互 独立的三维坐标通过引入空间距离转换为二维的坐标表达。In the formula, Sqrt() can be a square root function. There are two calculation results that satisfy the above formula, among which Z′u2 that is closer to the original three-dimensional coordinates (Xu2 , Yu2 , Zu2 ) of the auxiliary antenna can be used as the correct value, then the final two transformed by the auxiliary antenna The three-dimensional coordinate expression can be (Xu2 , Yu2 , Z′u2 ), that is, the three-dimensional coordinates that are originally independent of each other are transformed into two-dimensional coordinate expression by introducing a space distance.
在基于所引入的空间直线距离对坐标进行转换后,可以降低坐标搜索时所需的计算量。假设在对原三维空间坐标进行搜索时,对三维坐标中的各分量搜索范围相等且设定为1m,那么所确定的用于坐标搜索的整个搜索区间为一个三维正方体,搜索体积约为1m3;但如果对副天线的二维坐标表达进行搜索,此时仅需要在X、Y分量上进行搜索,搜索区间为一个平面,搜索面积约为1m2,使得搜索空间急剧减小,搜索效率将得到显著提升。After the coordinates are converted based on the introduced space straight-line distance, the amount of computation required for coordinate searching can be reduced. Assuming that when searching the original three-dimensional space coordinates, the search range of each component in the three-dimensional coordinates is equal and set to 1m, then the entire search interval determined for coordinate search is a three-dimensional cube, and the search volume is about1m3 ; but if the search is performed on the two-dimensional coordinate expression of the sub-antenna, it is only necessary to search on the X and Y components at this time, the search interval is a plane, and the search area is about 1m2 , so that the search space is reduced sharply, and the search efficiency will be reduced be significantly improved.
步骤202,设置针对副天线二维坐标表达的候选区间,并确定针对副天线二维坐标表达的收敛区间;
在将副天线的三维空间坐标转换为二维坐标表达的基础上,可以直接从副天线的候选坐标出发,依据模糊度的整数特性,直接搜索最优的候选坐标再反算固定模糊度。具体的,采用粒子种群优化算法对副天线的二维坐标域进行全局最优搜索,并依据模糊度函数法作为适应度评价指标确定优选坐标值。On the basis of converting the three-dimensional space coordinates of the sub-antenna into two-dimensional coordinates, starting from the candidate coordinates of the sub-antenna, according to the integer characteristics of the ambiguity, the optimal candidate coordinates can be directly searched and then the fixed ambiguity can be back-calculated. Specifically, the particle population optimization algorithm is used to search for the global optimality of the two-dimensional coordinate domain of the sub-antenna, and the optimal coordinate value is determined according to the ambiguity function method as the fitness evaluation index.
在本申请一些实施例中,首先如图3所示,需要设置针对副天线二维坐标表达的候选区间,并确定针对副天线二维坐标表达的收敛区间,然后根据在候选区间中与二维坐标表达相应粒子种群的模糊度函数值,以及预设粒子种群优化算法,从收敛区间中确定优选粒子的优选坐标值。In some embodiments of the present application, firstly, as shown in FIG. 3 , it is necessary to set the candidate interval expressed for the two-dimensional coordinates of the secondary antenna, and determine the convergence interval expressed for the two-dimensional coordinates of the secondary antenna, and then according to the candidate interval and the two-dimensional The coordinates express the ambiguity function value of the corresponding particle population, and the preset particle population optimization algorithm determines the optimal coordinate value of the optimal particle from the convergence interval.
对于针对副天线二维坐标表达的候选区间的设置,可以根据副天线的三维空间坐标或基于三维空间坐标进行动态定位状态更新后的坐标预测值,对副天线二维坐标表达的候选区间进行确定。所确定的候选区间可以指的是针对副天线二维坐标设定的搜索区间,本申请一些实施例以依据初始三维坐标(Xu2,Yu2,Zu2)的精度来设定为例,首先可设定针对副天线的三维空间坐标中单个分量的坐标搜索区间,以副天线的三维X、Y分量的坐标为中心,坐标搜索区间为搜索距离,确定副天线二维坐标表达的候选区间。For the setting of the candidate interval expressed by the two-dimensional coordinates of the auxiliary antenna, the candidate interval expressed by the two-dimensional coordinates of the auxiliary antenna can be determined according to the three-dimensional space coordinates of the auxiliary antenna or the coordinate prediction value after the dynamic positioning state update based on the three-dimensional space coordinates . The determined candidate interval may refer to the search interval set for the two-dimensional coordinates of the secondary antenna. In some embodiments of the present application, the setting is based on the accuracy of the initial three-dimensional coordinates (Xu2 , Yu2 , Zu2 ) as an example. First, The coordinate search interval for a single component in the three-dimensional space coordinates of the sub-antenna can be set, centered on the coordinates of the three-dimensional X and Y components of the sub-antenna, and the coordinate search interval is the search distance to determine the candidate interval expressed by the two-dimensional coordinates of the sub-antenna.
示例性地,假设设定副天线的初始三维坐标中单个分量的坐标搜索区间为1m,即此时可围绕副天线初始三维X/Y分量坐标为中心,边长为1m的正方形内进行坐标搜索,Z分量坐标则根据基于所引入空间距离为约束信息 进行坐标转换的公式进行反算确定。As an example, assume that the coordinate search interval of a single component in the initial three-dimensional coordinates of the auxiliary antenna is set to 1m, that is, at this time, the coordinate search can be performed in a square with a side length of 1m around the initial three-dimensional X/Y component coordinates of the auxiliary antenna as the center , and the coordinates of the Z component are determined by inverse calculation based on the coordinate transformation formula based on the introduced spatial distance as constraint information.
对于针对副天线二维坐标表达的收敛区间的确定,所确定的收敛区间可用于表示满足粒子种群优化的坐标范围,即最优种群的坐标范围,那么其本质上可以表现为对坐标搜索的收敛条件的设定。For the determination of the convergence interval expressed for the two-dimensional coordinates of the sub-antenna, the determined convergence interval can be used to represent the coordinate range that satisfies the optimization of the particle population, that is, the coordinate range of the optimal population, then it can essentially be expressed as the convergence of the coordinate search Condition setting.
具体的,可以基于所构建的双差相位观测方程,对副天线二维坐标表达的收敛区间进行确定。首先可获取主副天线的双差卫地距离值和双差观测值,采用主副天线的双差卫地距离值和双差观测值构建双差相位观测方程,基于双差相位观测方程确定用于对优选粒子进行坐标搜索的收敛区间。Specifically, the convergence interval expressed by the two-dimensional coordinates of the sub-antenna may be determined based on the constructed double-difference phase observation equation. First, the double-difference satellite distance value and double-difference observation value of the main and auxiliary antennas can be obtained, and the double-difference phase observation equation is constructed by using the double-difference satellite distance value and double-difference observation value of the main and auxiliary antennas. It is used for the convergence interval of coordinate search for optimal particles.
在实际应用中,对于主副天线双差卫地距离值

式中,
对于主副天线GNSS双差观测值

式中,
在采用主副天线的双差卫地距离值和双差观测值构建双差相位观测方程时,所构建的双差相位观测方程可以表示为:When the dual-difference satellite distance value and double-difference observation value of the main and auxiliary antennas are used to construct the double-difference phase observation equation, the constructed double-difference phase observation equation can be expressed as:

式中,


此时将用于计算主副天线双差卫地距离值
其中,用于计算模糊度的中误差的公式可以如下:Wherein, the formula for calculating the medium error of the ambiguity can be as follows:

式中,
步骤203,采用粒子种群优化算法对副天线的候选坐标进行优选搜索,并将优选粒子种群的坐标范围实时缩小副天线候选坐标的搜索空间,直到满足坐标收敛条件,以输出优选坐标对模糊度进行固定。Step 203: Use the particle population optimization algorithm to optimize the search for the candidate coordinates of the sub-antenna, and narrow down the search space of the candidate coordinates of the sub-antenna in real time with the coordinate range of the preferred particle population until the coordinate convergence condition is satisfied, and optimize the ambiguity by outputting the preferred coordinates fixed.
在本申请一些实施例中,根据在候选区间中与二维坐标表达相应粒子种群的模糊度函数值,以及预设粒子种群优化算法,从收敛区间中确定优选粒子的优选坐标值,通过最优的候选坐标反算得到固定模糊度,完成对模糊度的快速固定。In some embodiments of the present application, according to the ambiguity function value of the corresponding particle population expressed in the candidate interval and the two-dimensional coordinates, and the preset particle population optimization algorithm, the optimal coordinate value of the preferred particle is determined from the convergence interval, and through the optimal The fixed ambiguity is obtained by inverse calculation of the candidate coordinates of , and the rapid fixation of the ambiguity is completed.
此时可以获取在候选区间中与二维坐标表达相应粒子种群的模糊度函数值,然后根据粒子种群的模糊度函数值以及预设粒子种群优化算法,从收敛区间中确定优选粒子的优选坐标值。依据模糊度函数值作为粒子适应度的评价指标以及对粒子的优化,具体的如图3所示,可根据粒子种群的模糊度函数值确定当前的优选粒子,若当前的优选粒子的坐标分布不满足收敛区间,则可以采用预设粒子种群优选算法对粒子种群进行优化,然后可以基于优化后的粒子种群中各个粒子的模糊度函数值,从优化后的粒子种群中确定目标优选粒子并输出目标优选粒子的优选坐标值。At this time, the ambiguity function value of the corresponding particle population expressed in the candidate interval and the two-dimensional coordinates can be obtained, and then the optimal coordinate value of the preferred particle can be determined from the convergence interval according to the ambiguity function value of the particle population and the preset particle population optimization algorithm . According to the ambiguity function value as the evaluation index of particle fitness and the optimization of particles, as shown in Figure 3, the current preferred particle can be determined according to the ambiguity function value of the particle population. If the coordinate distribution of the current preferred particle is not If the convergence interval is satisfied, the particle population can be optimized using the preset particle population optimization algorithm, and then based on the ambiguity function value of each particle in the optimized particle population, the target optimal particle can be determined from the optimized particle population and the target output Preferred coordinate values for preferred particles.
其中,对于优选粒子的确定过程,可以在所设置的针对副天线二维坐标表达的候选区间中,初始化当前粒子种群中所有粒子的速度和位置,然后基于粒子种群中各个粒子的位置计算各个粒子的初步模糊度函数值,由于副天线的候选坐标越精确模糊度函数值越大,此时可以按照初步模糊度函数值对 各个粒子的适应度进行降序排序,选出最优个体和最优群体,具体可确定位于排序在首位的粒子为当前的优选粒子。Among them, for the process of determining the optimal particle, the velocity and position of all particles in the current particle population can be initialized in the set candidate interval expressed for the two-dimensional coordinates of the sub-antenna, and then each particle can be calculated based on the position of each particle in the particle population The preliminary ambiguity function value of , since the more accurate the candidate coordinates of the secondary antenna, the greater the ambiguity function value, at this time, the fitness of each particle can be sorted in descending order according to the preliminary ambiguity function value, and the optimal individual and the optimal group can be selected , specifically, it can be determined that the particle at the top of the list is the current preferred particle.
在实际应用中,对于粒子群搜索方法(即粒子种群优化算法),种群中包括多个粒子,每个粒子具有不同的速度和位置,每个粒子可以考虑自身搜索到的历史最优点和其它粒子的历史最优点,不断更新自己的速度和位置,最终使自己朝着坐标最优的方向不断进化,为避免陷入局部最优引入粒子变异等操作。当大多数粒子都趋于某个较小区域时,可判定该区域为全局最优的坐标区域。In practical applications, for the particle swarm search method (i.e., the particle population optimization algorithm), the population includes multiple particles, each particle has a different speed and position, and each particle can consider the historical optimal point searched by itself and other particles The historical best point, constantly updating its speed and position, and finally making itself evolve towards the optimal coordinate direction, and introducing particle mutation and other operations to avoid falling into local optimum. When most particles tend to a small area, it can be determined that this area is the globally optimal coordinate area.
示例性地,首先,设定种群粒子总个数为n,选取n/2个粒子为最优群体。在设定的副天线坐标候选区间内,初始化所有粒子的速度和位置:Exemplarily, first, set the total number of population particles as n, and select n/2 particles as the optimal population. In the set sub-antenna coordinate candidate interval, initialize the velocity and position of all particles:

式中,下标i=1,2,…,n为粒子编号,下标j=1,2为坐标搜索的维度,rand为[0,1]的随机数,vij为粒子的速度值,rij为粒子对应的位置,r0为副天线初始二维坐标。In the formula, the subscript i=1,2,...,n is the particle number, the subscript j=1,2 is the coordinate search dimension, rand is the random number of [0,1], vij is the velocity value of the particle, rij is the position corresponding to the particle, and r0 is the initial two-dimensional coordinates of the sub-antenna.
根据粒子的位置,计算对应的模糊度函数值:According to the position of the particle, calculate the corresponding ambiguity function value:

式中,下标ni为双差观测值个数,nf为观测值频率个数。分析上式可知,副天线的候选坐标越精确,则模糊度函数值越大。此时可根据初步的模糊度函数值,进一步降序选出最优个体和最优群体,这决定了后续粒子进化的梯度方向。In the formula, the subscript ni is the number of double-difference observations, and nf is the number of observation frequencies. Analysis of the above formula shows that the more accurate the candidate coordinates of the secondary antenna, the greater the value of the ambiguity function. At this time, the optimal individual and the optimal group can be further selected in descending order according to the preliminary ambiguity function value, which determines the gradient direction of subsequent particle evolution.
在采用预设粒子种群优选算法对粒子种群进行优化的过程中,其使得粒子不断朝着坐标最优的方向进化,如图3所示,具体可获取粒子种群中粒子的速度最大值和位置最大值,分别将速度最大值和位置最大值作为优选粒子的优选位置和优选速度,然后采用优选粒子的优选位置和优选速度更新粒子种群中所有粒子的速度与位置,以及此时还可以获取粒子种群中的优选种群以及优选坐标,并对优选种群中所有粒子沿着优选坐标方向进行优化,直至使得优选种群中粒子的坐标分布满足收敛区间为止。In the process of optimizing the particle population using the preset particle population optimization algorithm, it makes the particles evolve towards the direction of optimal coordinates, as shown in Figure 3, specifically, the maximum velocity and maximum position of the particles in the particle population can be obtained value, take the maximum value of velocity and the maximum value of position as the preferred position and preferred speed of the preferred particle respectively, then use the preferred position and preferred speed of the preferred particle to update the velocities and positions of all particles in the particle population, and at this time the particle population can also be obtained The optimal population and optimal coordinates in the optimal population, and optimize all the particles in the optimal population along the direction of the optimal coordinates until the coordinate distribution of the particles in the optimal population satisfies the convergence interval.
参照图4,示出了本申请实施例提供的粒子种群优化的示意图,对于更新粒子新的速度和位置,假设第i个粒子的位置和速度分别表示为vi=(vi1,…,vij)和ri=(ri1,…,rij),第i个粒子的历史最优点为pi=(pi1,…,pij),群体内所有粒子的最优点为pg=(pg1,…,pgj),则单个粒子的速度和位置更新可表达为:Referring to FIG. 4 , it shows a schematic diagram of the particle population optimization provided by the embodiment of the present application. For updating the new velocity and position of the particle, it is assumed that the position and velocity of the i-th particle are expressed as vi =(vi1 ,...,vij ) and ri =(ri1 ,…,rij ), the historical optimal point of the i-th particle is pi =(pi1 ,…,pij ), and the optimal point of all particles in the group is pg =( pg1 ,…,pgj ), then the velocity and position update of a single particle can be expressed as:

式中,k为进化次数,c1和c2为学习因子,一般都取0.5;w为惯性权重,具有平衡广域搜索和局部搜索的作用。粒子的速度和位置被限制在一个最大值以内,若粒子的速度或位置超过最大值,取最大值作为粒子的更新速度或更新位置。In the formula, k is the number of evolutions, c1 and c2 are learning factors, generally 0.5; w is the inertia weight, which has the function of balancing wide-area search and local search. The speed and position of the particle are limited within a maximum value. If the speed or position of the particle exceeds the maximum value, the maximum value is taken as the update speed or update position of the particle.
其中,由于粒子群算法收敛速度较快,极易陷入局部最优,可以在上述进化过程中添加变异操作,变异只针对最优群体进行,变异计算公式可以为:Among them, due to the fast convergence speed of the particle swarm optimization algorithm, it is easy to fall into a local optimum. A mutation operation can be added in the above evolution process. The mutation is only performed on the optimal group. The variation calculation formula can be:

式中,Gauss(0,1)为高斯分布的随机数。In the formula, Gauss(0,1) is a random number of Gaussian distribution.
在本申请一些实施例中,通过种群不断的进化和变异,粒子会沿着最优坐标方向不断靠近最优解,同时最优群体粒子(n/2)的集中度越来越高,此时根据最优群体粒子的坐标分布,即(X,Y)[单位为m]可以缩小整个群体的搜索空间,直到满足坐标收敛条件为止。如图4所示,经过6代的进化和变异,大部分粒子已接近坐标最优位置,最后将最优粒子的位置作为副天线的候选坐标输出,为避免陷入无限循环,可设定种群最大进化次数为一定次数,例如100次。In some embodiments of the present application, through the continuous evolution and mutation of the population, the particles will continue to approach the optimal solution along the direction of the optimal coordinates, and at the same time the concentration of the optimal population particles (n/2) is getting higher and higher. At this time According to the coordinate distribution of the optimal group particles, that is (X, Y) [unit is m], the search space of the whole group can be narrowed until the coordinate convergence condition is satisfied. As shown in Figure 4, after 6 generations of evolution and mutation, most of the particles are close to the optimal position of the coordinates, and finally the position of the optimal particle is output as the candidate coordinates of the sub-antenna. In order to avoid falling into an infinite loop, the maximum population can be set The number of times of evolution is a certain number of times, for example, 100 times.
在本申请一些的实施例中,导航系统的模糊度具有整数特性,在基于同样具有整数特性的模糊度函数值作为各个粒子的适应度指标输出得到优选坐标值后,可以直接从副天线的候选坐标出发,依据模糊度的整数特性,直接搜索最优的候选坐标再反算固定模糊度。In some embodiments of the present application, the ambiguity of the navigation system has an integer characteristic. After the optimal coordinate value is obtained based on the ambiguity function value that also has the integer characteristic as the fitness index output of each particle, it can be directly obtained from the candidate of the secondary antenna. Starting from the coordinates, according to the integer characteristics of the ambiguity, the optimal candidate coordinates are directly searched and then the fixed ambiguity is back-calculated.
具体的,可采用副天线的优选坐标反算得到模糊度浮点解,并采用四舍五入对模糊度浮点解进行取整,得到模糊度的整数解,完成对模糊度的固定。Specifically, the optimal coordinates of the sub-antenna can be used to inversely calculate the floating-point solution of the ambiguity, and rounding is used to round the floating-point solution of the ambiguity to obtain an integer solution of the ambiguity to complete the fixation of the ambiguity.
其中,对模糊度整数解的计算,其表达式可以如下:Among them, the calculation of the integer solution of the ambiguity can be expressed as follows:

式中,round()为四舍五入取整算法;



一般来说,由于观测值和候选坐标均存在误差,并不是所有双差模糊度都直接取整固定为整数,实际操作时仅当
在本申请一些实施例中,通过引入已知的双/多天线的几何空间距离,将副天线的三维坐标转换为二维坐标表达,由此将原三维搜索空间直接压缩为二维搜索空间,并依据模糊度函数法作为评价指标,不断朝向最优候选坐标的方向进化和靠拢,最终搜索得到副天线的优选坐标值,然后基于优选候选坐标反算得到模糊度的整数解,降低了坐标搜索的维度,提升了坐标搜索的效率,且其方式不受卫星个数和观测值周跳的影响,实现GNSS姿态定位模糊度的快速固定。In some embodiments of the present application, the three-dimensional coordinates of the secondary antennas are converted into two-dimensional coordinate expressions by introducing the known geometric space distances of dual/multi-antennas, thereby directly compressing the original three-dimensional search space into a two-dimensional search space, And according to the ambiguity function method as the evaluation index, it continuously evolves and approaches the direction of the optimal candidate coordinates, and finally searches for the optimal coordinate value of the sub-antenna, and then obtains the integer solution of the ambiguity based on the optimal candidate coordinates, which reduces the coordinate search. The dimension improves the efficiency of coordinate search, and its method is not affected by the number of satellites and the cycle slip of observation values, and realizes the rapid fixation of GNSS attitude positioning ambiguity.
需要说明的是,对于方法实施例,为了简单描述,故将其都表述为一系列的动作组合,但是本领域技术人员应该知悉,本申请实施例并不受所描述的动作顺序的限制,因为依据本申请实施例,某些步骤可以采用其他顺序或者同时进行。其次,本领域技术人员也应该知悉,说明书中所描述的实施例均属于优选实施例,所涉及的动作并不一定是本申请实施例所必须的。It should be noted that, for the method embodiment, for the sake of simple description, it is expressed as a series of action combinations, but those skilled in the art should know that the embodiment of the present application is not limited by the described action sequence, because According to the embodiment of the present application, certain steps may be performed in other orders or simultaneously. Secondly, those skilled in the art should also know that the embodiments described in the specification belong to preferred embodiments, and the actions involved are not necessarily required by the embodiments of the present application.
参照图6,示出了本申请提供的导航系统的模糊度固定装置实施例的结构框图,具体可以包括如下模块:Referring to Fig. 6, it shows a structural block diagram of an embodiment of the ambiguity fixing device of the navigation system provided by the present application, which may specifically include the following modules:
坐标转换模块601,用于获取主副天线的空间直线距离,基于主副天线 的空间直线距离将副天线的三维空间坐标转换为二维坐标表达;The coordinate
优选坐标值确定模块602,用于根据副天线的二维坐标表达的模糊度函数值,从副天线的二维坐标表达中确定针对副天线的优选坐标值;The preferred coordinate
模糊度固定模块603,用于根据副天线的优选坐标值计算得到模糊度的整数解,完成对导航系统的模糊度固定。The
在本申请实施例提出的导航系统的模糊度固定装置中,坐标转换模块601可以包括如下子模块:In the ambiguity fixing device of the navigation system proposed in the embodiment of the present application, the coordinate
坐标转换子模块,用于获取主天线的三维空间坐标,采用三维空间距离直线的计算公式将主副天线的空间直线距离基于主副天线的三维空间坐标进行反算,得到副天线的三维空间坐标中Z分量的坐标表达;Z分量的坐标表达用于采用主天线的三维空间坐标以及副天线的三维空间坐标中的X、Y分量坐标进行表示。The coordinate conversion sub-module is used to obtain the three-dimensional space coordinates of the main antenna, and uses the calculation formula of the three-dimensional space distance line to inversely calculate the space line distance of the main and auxiliary antennas based on the three-dimensional space coordinates of the main and auxiliary antennas to obtain the three-dimensional space coordinates of the auxiliary antenna The coordinate expression of the Z component; the coordinate expression of the Z component is used to express the three-dimensional space coordinates of the main antenna and the X and Y component coordinates of the three-dimensional space coordinates of the auxiliary antenna.
在本申请提出的导航系统的模糊度固定装置中,优选坐标值确定模块602可以包括如下子模块:In the ambiguity fixing device of the navigation system proposed in this application, the preferred coordinate
区间设定子模块,用于设置针对副天线二维坐标表达的候选区间,并确定针对副天线二维坐标表达的收敛区间;收敛区间用于表示满足粒子种群优化的坐标范围;The interval setting sub-module is used to set the candidate interval expressed for the two-dimensional coordinates of the auxiliary antenna, and determine the convergence interval expressed for the two-dimensional coordinates of the auxiliary antenna; the convergence interval is used to represent the coordinate range satisfying the optimization of the particle population;
模糊函数值获取子模块,用于获取在候选区间中与二维坐标表达相应粒子种群的模糊度函数值;The fuzzy function value acquisition submodule is used to obtain the fuzzy degree function value of the particle population corresponding to the two-dimensional coordinate expression in the candidate interval;
优选坐标值确定子模块,用于根据粒子种群的模糊度函数值以及预设粒子种群优化算法,从收敛区间中确定优选粒子的优选坐标值。The optimal coordinate value determination sub-module is used to determine the optimal coordinate value of the optimal particle from the convergence interval according to the ambiguity function value of the particle population and the preset particle population optimization algorithm.
在本申请提出的导航系统的模糊度固定装置中,区间设定子模块可以包括如下单元:In the ambiguity fixing device of the navigation system proposed in this application, the interval setting submodule may include the following units:
候选区间确定单元,用于根据副天线的三维空间坐标或基于三维空间坐标进行动态定位状态更新后的坐标预测值,对副天线二维坐标表达的候选区间进行确定。The candidate interval determination unit is configured to determine the candidate interval expressed by the two-dimensional coordinates of the auxiliary antenna according to the three-dimensional space coordinates of the auxiliary antenna or the coordinate prediction value after dynamic positioning state update based on the three-dimensional space coordinates.
在本申请提出的导航系统的模糊度固定装置中,候选区间确定单元可以包括如下子单元:In the ambiguity fixing device of the navigation system proposed in this application, the candidate interval determination unit may include the following subunits:
候选区间确定子单元,用于设定针对副天线的三维空间坐标中单个分量的坐标搜索区间,以副天线的三维X、Y分量的坐标为中心,坐标搜索区间为搜索距离,确定副天线二维坐标表达的候选区间。The candidate interval determination subunit is used to set the coordinate search interval for a single component in the three-dimensional space coordinates of the auxiliary antenna, with the coordinates of the three-dimensional X and Y components of the auxiliary antenna as the center, and the coordinate search interval is the search distance. Candidate intervals expressed by dimensional coordinates.
在本申请提出的导航系统的模糊度固定装置中,区间设定子模块可以包括如下单元:In the ambiguity fixing device of the navigation system proposed in this application, the interval setting submodule may include the following units:
观测方程构建单元,用于获取主副天线的双差卫地距离值和双差观测值,采用主副天线的双差卫地距离值和双差观测值构建双差相位观测方程;The observation equation construction unit is used to obtain the double-difference satellite distance value and the double-difference observation value of the main and auxiliary antennas, and the double-difference satellite distance value and the double-difference observation value of the main and auxiliary antennas are used to construct the double-difference phase observation equation;
收敛区间确定单元,用于根据双差相位观测方程确定针对副天线二维坐标表达的收敛区间;收敛区间用于对优选粒子进行坐标搜索。The convergence interval determination unit is used to determine the convergence interval expressed for the two-dimensional coordinates of the sub-antenna according to the double-difference phase observation equation; the convergence interval is used for coordinate search of the preferred particle.
在本申请提出的导航系统的模糊度固定装置中,收敛区间确定单元可以包括如下子单元:In the ambiguity fixing device of the navigation system proposed in this application, the convergence interval determination unit may include the following subunits:
收敛区间确定子单元,用于采用误差传播定律和主天线的三维空间坐标,对所构建的相位观测方程计算模糊度的中误差,基于对中误差的要求阈值确定用于对优选粒子进行坐标搜索的收敛区间。The convergence interval determination subunit is used to calculate the middle error of the ambiguity for the phase observation equation constructed by using the error propagation law and the three-dimensional space coordinates of the main antenna, and determine the required threshold based on the centering error for coordinate search of the preferred particle the convergence interval.
在本申请提出的导航系统的模糊度固定装置中,优选坐标值确定子模块可以包括如下单元:In the ambiguity fixing device of the navigation system proposed in this application, the preferred coordinate value determination submodule may include the following units:
优选粒子确定单元,用于根据粒子种群的模糊度函数值确定当前的优选粒子;A preferred particle determination unit is used to determine the current preferred particle according to the ambiguity function value of the particle population;
粒子种群优化单元,用于在当前的优选粒子的坐标分布不满足收敛区间时,采用预设粒子种群优选算法对粒子种群进行优化;The particle population optimization unit is used to optimize the particle population by using the preset particle population optimization algorithm when the coordinate distribution of the current optimal particle does not satisfy the convergence interval;
优选坐标值确定单元,用于基于优化后的粒子种群中各个粒子的模糊度函数值,从优化后的粒子种群中确定目标优选粒子并输出目标优选粒子的优选坐标值。The optimal coordinate value determining unit is configured to determine the optimal target particle from the optimized particle population based on the ambiguity function value of each particle in the optimized particle population and output the optimal coordinate value of the target optimal particle.
在本申请提出的导航系统的模糊度固定装置中,优选粒子确定单元可以包括如下子单元:In the ambiguity fixing device of the navigation system proposed in this application, preferably, the particle determination unit may include the following subunits:
粒子初始化子单元,用于在所设置的针对副天线二维坐标表达的候选区间中,初始化当前粒子种群中所有粒子的速度和位置;The particle initialization subunit is used to initialize the velocity and position of all particles in the current particle population in the set candidate interval expressed for the two-dimensional coordinates of the secondary antenna;
模糊度函数值计算子单元,用于基于粒子种群中各个粒子的位置计算各 个粒子的初步模糊度函数值;The ambiguity function value calculation subunit is used to calculate the preliminary ambiguity function value of each particle based on the position of each particle in the particle population;
优选粒子确定子单元,用于按照初步模糊度函数值对各个粒子的适应度进行降序排序,确定位于排序在首位的粒子为当前的优选粒子。The optimal particle determination subunit is used to sort the fitness of each particle in descending order according to the preliminary ambiguity function value, and determine the particle at the top of the list as the current optimal particle.
在本申请提出的导航系统的模糊度固定装置中,粒子种群优化子模块可以包括如下单元:In the ambiguity fixing device of the navigation system proposed in this application, the particle population optimization submodule may include the following units:
优选值确定单元,用于获取粒子种群中粒子的速度最大值和位置最大值,分别将速度最大值和位置最大值作为优选粒子的优选位置和优选速度;A preferred value determination unit is used to obtain the maximum velocity and the maximum position of the particles in the particle population, and use the maximum velocity and the maximum position as the preferred position and preferred velocity of the preferred particles, respectively;
粒子更新单元,用于采用优选粒子的优选位置和优选速度更新粒子种群中所有粒子的速度与位置;A particle updating unit, configured to update the speed and position of all particles in the particle population by using the preferred position and preferred speed of the preferred particle;
粒子种群优化单元,用于获取粒子种群中的优选种群以及优选坐标,并对优选种群中所有粒子沿着优选坐标方向进行优化,直至使得优选种群中粒子的坐标分布满足收敛区间为止。The particle population optimization unit is used to obtain the optimal population and optimal coordinates in the particle population, and optimize all the particles in the optimal population along the direction of the optimal coordinates until the coordinate distribution of the particles in the optimal population satisfies the convergence interval.
在本申请提出的导航系统的模糊度固定装置中,模糊度固定模块603可以包括如下子模块:In the ambiguity fixing device of the navigation system proposed in this application, the
模糊度固定子模块,用于采用副天线的优选坐标反算得到模糊度浮点解,并采用四舍五入对模糊度浮点解进行取整,得到模糊度的整数解。The ambiguity fixing sub-module is used to use the preferred coordinates of the sub-antenna to obtain the ambiguity floating-point solution, and use rounding to round the ambiguity floating-point solution to obtain the ambiguity integer solution.
对于装置实施例而言,由于其与方法实施例基本相似,所以描述的比较简单,相关之处参见方法实施例的部分说明即可。As for the device embodiment, since it is basically similar to the method embodiment, the description is relatively simple, and for related parts, please refer to the part of the description of the method embodiment.
本申请实施例还提供了一种导航模组,包括:处理器;存储处理器可执行的存储器;其中,处理器耦合于存储器,用于读取存储器存储的程序指令,并作为响应,执行如下操作:The embodiment of the present application also provides a navigation module, including: a processor; a memory executable by the processor; wherein, the processor is coupled to the memory, and is used to read the program instructions stored in the memory, and in response, perform the following operate:
获取主副天线的空间直线距离,基于主副天线的空间直线距离将副天线的三维空间坐标转换为二维坐标表达;Obtain the spatial straight-line distance of the main and auxiliary antennas, and convert the three-dimensional space coordinates of the auxiliary antennas into two-dimensional coordinate expressions based on the spatial straight-line distances of the main and auxiliary antennas;
根据副天线的二维坐标表达的模糊度函数值,从副天线的二维坐标表达中确定针对副天线的优选坐标值;According to the ambiguity function value expressed by the two-dimensional coordinates of the auxiliary antenna, the preferred coordinate value for the auxiliary antenna is determined from the two-dimensional coordinate expression of the auxiliary antenna;
根据副天线的优选坐标值计算得到模糊度的整数解,完成对导航系统的模糊度固定。The integer solution of the ambiguity is calculated according to the optimal coordinate value of the secondary antenna, and the ambiguity of the navigation system is fixed.
本申请一些实施例还提供了一种导航设备,包括:处理器;存储处理器可执行的存储器;其中,处理器耦合于存储器,用于读取存储器存储的程序指令,并作为响应,执行如下操作:Some embodiments of the present application also provide a navigation device, including: a processor; a memory executable by the processor; wherein, the processor is coupled to the memory, and is used to read the program instructions stored in the memory, and in response, perform the following operate:
获取主副天线的空间直线距离,基于主副天线的空间直线距离将副天线的三维空间坐标转换为二维坐标表达;Obtain the spatial straight-line distance of the main and auxiliary antennas, and convert the three-dimensional space coordinates of the auxiliary antennas into two-dimensional coordinate expressions based on the spatial straight-line distances of the main and auxiliary antennas;
根据副天线的二维坐标表达的模糊度函数值,从副天线的二维坐标表达中确定针对副天线的优选坐标值;According to the ambiguity function value expressed by the two-dimensional coordinates of the auxiliary antenna, the preferred coordinate value for the auxiliary antenna is determined from the two-dimensional coordinate expression of the auxiliary antenna;
根据副天线的优选坐标值计算得到模糊度的整数解,完成对导航系统的模糊度固定。The integer solution of the ambiguity is calculated according to the optimal coordinate value of the secondary antenna, and the ambiguity of the navigation system is fixed.
本申请一些实施例还提供了一种交通工具,包括:Some embodiments of the present application also provide a vehicle, including:
包括上述导航系统的模糊度固定装置或上述导航芯片或上述导航模组或上述导航设备、处理器、存储器及存储在存储器上并能够在处理器上运行的计算机程序,该计算机程序被处理器执行时实现上述导航系统的模糊度固定方法实施例的各个过程,且能达到相同的技术效果,为避免重复,这里不再赘述。It includes the ambiguity fixing device of the above-mentioned navigation system or the above-mentioned navigation chip or the above-mentioned navigation module or the above-mentioned navigation equipment, a processor, a memory, and a computer program stored on the memory and capable of running on the processor, and the computer program is executed by the processor Each process of the embodiment of the ambiguity fixing method of the above-mentioned navigation system can be realized at the same time, and the same technical effect can be achieved. In order to avoid repetition, details are not repeated here.
本申请一些实施例还提供了一种计算机可读存储介质,计算机可读存储介质上存储计算机程序,计算机程序被处理器执行时实现上述导航系统的模糊度固定方法实施例的各个过程,且能达到相同的技术效果,为避免重复,这里不再赘述。Some embodiments of the present application also provide a computer-readable storage medium, on which a computer program is stored, and when the computer program is executed by a processor, each process of the embodiment of the ambiguity fixing method for the above-mentioned navigation system is implemented, and can To achieve the same technical effect, in order to avoid repetition, no more details are given here.
本说明书中的各个实施例均采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似的部分互相参见即可。Each embodiment in this specification is described in a progressive manner, each embodiment focuses on the difference from other embodiments, and the same and similar parts of each embodiment can be referred to each other.
本领域内的技术人员应明白,本申请一些实施例的实施例可提供为方法、装置、或计算机程序产品。因此,本申请一些实施例可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本申请一些实施例可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、CD-ROM、光学存储器等)上实施的计算机程序产品的形式。Those skilled in the art should understand that the embodiments of some embodiments of the present application may be provided as methods, apparatuses, or computer program products. Accordingly, some embodiments of the present application may take the form of an entirely hardware embodiment, an entirely software embodiment, or an embodiment combining software and hardware aspects. Furthermore, some embodiments of the present application may take the form of a computer program product embodied on one or more computer-usable storage media (including but not limited to disk storage, CD-ROM, optical storage, etc.) having computer-usable program code embodied therein. .
本申请一些实施例是参照根据本申请一些实施例的方法、终端设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理终端设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理终端设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。Some embodiments of the present application are described with reference to flowcharts and/or block diagrams of methods, terminal devices (systems), and computer program products according to some embodiments of the present application. It should be understood that each procedure and/or block in the flowchart and/or block diagram, and a combination of procedures and/or blocks in the flowchart and/or block diagram can be realized by computer program instructions. These computer program instructions may be provided to a general purpose computer, special purpose computer, embedded processor or processor of other programmable data processing terminal equipment to produce a machine such that instructions executed by the computer or processor of other programmable data processing terminal equipment Produce means for realizing the functions specified in one or more procedures of the flowchart and/or one or more blocks of the block diagram.
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理终端设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。These computer program instructions may also be stored in a computer-readable memory capable of directing a computer or other programmable data processing terminal to operate in a specific manner, such that the instructions stored in the computer-readable memory produce an article of manufacture comprising instruction means, the The instruction means implements the functions specified in one or more procedures of the flowchart and/or one or more blocks of the block diagram.
这些计算机程序指令也可装载到计算机或其他可编程数据处理终端设备上,使得在计算机或其他可编程终端设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程终端设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。These computer program instructions can also be loaded into a computer or other programmable data processing terminal equipment, so that a series of operational steps are performed on the computer or other programmable terminal equipment to produce computer-implemented processing, thereby The instructions executed above provide steps for implementing the functions specified in one or more procedures of the flowchart and/or one or more blocks of the block diagram.
尽管已描述了本申请一些实施例的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例做出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本申请一些实施例范围的所有变更和修改。While there have been described preferred embodiments of some of the embodiments of the present application, additional changes and modifications to these embodiments can be made by those skilled in the art once the basic inventive concept is appreciated. Therefore, the appended claims are intended to be construed to cover the preferred embodiment as well as all changes and modifications which fall within the scope of some embodiments of the application.
最后,还需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者终端设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者终端设备所固有的要素。在没有更多限制的情况下,由语句“包括一 个……”限定的要素,并不排除在包括要素的过程、方法、物品或者终端设备中还存在另外的相同要素。Finally, it should also be noted that in this text, relational terms such as first and second etc. are only used to distinguish one entity or operation from another, and do not necessarily require or imply that these entities or operations, any such actual relationship or order exists. Furthermore, the term "comprises", "comprises" or any other variation thereof is intended to cover a non-exclusive inclusion such that a process, method, article, or terminal equipment comprising a set of elements includes not only those elements, but also includes elements not expressly listed. other elements identified, or also include elements inherent in such a process, method, article, or terminal equipment. Without further limitations, an element defined by the phrase "comprising a ..." does not preclude the presence of additional identical elements in the process, method, article or terminal equipment comprising the element.
以上对本申请所提供的一种导航系统的模糊度固定方法、相应的一种导航芯片、相应的一种导航设备以及相应的一种交通工具,进行了详细介绍,本文中应用了具体个例对本申请的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本申请的方法及其核心思想;同时,对于本领域的一般技术人员,依据本申请的思想,在具体实施方式及应用范围上均会有改变之处,综上,本说明书内容不应理解为对本申请的限制。The ambiguity fixing method of a navigation system provided by this application, a corresponding navigation chip, a corresponding navigation device, and a corresponding vehicle have been introduced in detail above. In this paper, specific examples are used to analyze the present application. The principle and implementation of the application have been described, and the description of the above examples is only used to help understand the method and core idea of the application; meanwhile, for those of ordinary skill in the art, according to the idea of the application, in the specific implementation and There will be changes in the scope of application. In summary, the content of this specification should not be construed as limiting the application.
Claims (13)
Translated fromChineseApplications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111577227.9ACN113970774B (en) | 2021-12-22 | 2021-12-22 | Ambiguity fixing method and device of navigation system |
| CN202111577227.9 | 2021-12-22 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023116267A1true WO2023116267A1 (en) | 2023-06-29 |
Family
ID=79590814
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/CN2022/132055CeasedWO2023116267A1 (en) | 2021-12-22 | 2022-11-15 | Ambiguity fixing method for navigation system, chip, device, and transportation |
Country Status (2)
| Country | Link |
|---|---|
| CN (1) | CN113970774B (en) |
| WO (1) | WO2023116267A1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN119045022A (en)* | 2024-08-23 | 2024-11-29 | 纳微星科(北京)科技有限公司 | Positioning method, positioning device, equipment, medium and product |
| CN119270317A (en)* | 2024-09-30 | 2025-01-07 | 武汉大学 | GNSS integer ambiguity estimation method and device based on improved particle swarm optimization |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113970774B (en)* | 2021-12-22 | 2022-04-01 | 广东汇天航空航天科技有限公司 | Ambiguity fixing method and device of navigation system |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5883598A (en)* | 1995-12-15 | 1999-03-16 | Signatron Technology Corporation | Position location system and method |
| CN101446634A (en)* | 2007-11-28 | 2009-06-03 | 中国科学院电子学研究所 | Combination measurement method for high precision position, azimuth angle and pitch angle, and device thereof |
| CN102565834A (en)* | 2011-11-30 | 2012-07-11 | 重庆九洲星熠导航设备有限公司 | Single-frequency GPS (Global Positioning System) direction-finding system and direction-finding and positioning method thereof |
| US20150369924A1 (en)* | 2013-02-04 | 2015-12-24 | Vanderbilt University | Method and system for high-accuracy differential tracking of global positioning system (gps) receivers |
| CN105204049A (en)* | 2015-10-12 | 2015-12-30 | 中国科学院光电研究院 | Positioning method based on three-dimension-to-one-direction carrier phase whole cycle ambiguity search |
| CN108917583A (en)* | 2018-05-18 | 2018-11-30 | 长安大学 | A new method for super high-rise building deformation monitoring considering the effect of tropospheric delay |
| CN110161546A (en)* | 2019-05-23 | 2019-08-23 | 杭州中科微电子有限公司 | A kind of satellite orientation device and method using iteration Weighted Fuzzy degree function method |
| CN113970774A (en)* | 2021-12-22 | 2022-01-25 | 广东汇天航空航天科技有限公司 | Ambiguity fixing method and device of navigation system |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102736073B (en)* | 2012-06-19 | 2013-08-14 | 北京航空航天大学 | Method for computing range ambiguity of satellite-borne synthetic aperture radar (SAR) in universal mode |
| CN104635249B (en)* | 2015-02-12 | 2017-05-03 | 东南大学 | Quick fixing method for precise point positioning (PPP) ambiguity considering FCBs (Fractional Carrier Bias) |
| CN106990424B (en)* | 2017-06-07 | 2020-07-28 | 重庆重邮汇测通信技术有限公司 | Double-antenna GPS attitude measurement method |
| EP3647821B1 (en)* | 2017-06-29 | 2021-12-15 | Panasonic Intellectual Property Management Co., Ltd. | Positioning method and positioning terminal |
| CN107607972A (en)* | 2017-08-21 | 2018-01-19 | 暨南大学 | A kind of integer ambiguity fast acquiring method based on materialized view maintenance |
| CN108427131B (en)* | 2017-11-23 | 2021-07-27 | 东华理工大学 | A Fast Search Algorithm for Integer Ambiguity Under Baseline Long Constraints |
| CN111198394B (en)* | 2018-11-19 | 2022-07-19 | 千寻位置网络有限公司 | Method and device for quickly fixing ambiguity of virtual reference station switching |
| CN110531394A (en)* | 2019-08-16 | 2019-12-03 | 桂林电子科技大学 | A kind of fuzziness fast resolution algorithm and device based on case theory and least square method |
| CN111651689A (en)* | 2020-05-14 | 2020-09-11 | 拉扎斯网络科技(上海)有限公司 | Data processing method, apparatus, readable storage medium and electronic device |
| CN113534210B (en)* | 2021-06-07 | 2022-05-31 | 湖南北斗微芯产业发展有限公司 | Ambiguity fixing method based on hybrid Kalman filtering |
- 2021
- 2021-12-22CNCN202111577227.9Apatent/CN113970774B/enactiveActive
- 2022
- 2022-11-15WOPCT/CN2022/132055patent/WO2023116267A1/ennot_activeCeased
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5883598A (en)* | 1995-12-15 | 1999-03-16 | Signatron Technology Corporation | Position location system and method |
| CN101446634A (en)* | 2007-11-28 | 2009-06-03 | 中国科学院电子学研究所 | Combination measurement method for high precision position, azimuth angle and pitch angle, and device thereof |
| CN102565834A (en)* | 2011-11-30 | 2012-07-11 | 重庆九洲星熠导航设备有限公司 | Single-frequency GPS (Global Positioning System) direction-finding system and direction-finding and positioning method thereof |
| US20150369924A1 (en)* | 2013-02-04 | 2015-12-24 | Vanderbilt University | Method and system for high-accuracy differential tracking of global positioning system (gps) receivers |
| CN105204049A (en)* | 2015-10-12 | 2015-12-30 | 中国科学院光电研究院 | Positioning method based on three-dimension-to-one-direction carrier phase whole cycle ambiguity search |
| CN108917583A (en)* | 2018-05-18 | 2018-11-30 | 长安大学 | A new method for super high-rise building deformation monitoring considering the effect of tropospheric delay |
| CN110161546A (en)* | 2019-05-23 | 2019-08-23 | 杭州中科微电子有限公司 | A kind of satellite orientation device and method using iteration Weighted Fuzzy degree function method |
| CN113970774A (en)* | 2021-12-22 | 2022-01-25 | 广东汇天航空航天科技有限公司 | Ambiguity fixing method and device of navigation system |
Non-Patent Citations (1)
| Title |
|---|
| ZHOU ZHI-HENG, ZHAO JIAN-JUN, YANG LI-BIN, SANG DE-YI: "Research on fast warship attitude determination algorithm based on beidou dimensionality reduction double difference model", SHIP SCIENCE AND TECHNOLOGY, vol. 38, no. 9, 1 September 2016 (2016-09-01), pages 116 - 121, XP093073289, ISSN: 1672-7649, DOI: 10.3404/j.issn.1672-7619.2016.09.024* |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN119045022A (en)* | 2024-08-23 | 2024-11-29 | 纳微星科(北京)科技有限公司 | Positioning method, positioning device, equipment, medium and product |
| CN119270317A (en)* | 2024-09-30 | 2025-01-07 | 武汉大学 | GNSS integer ambiguity estimation method and device based on improved particle swarm optimization |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113970774A (en) | 2022-01-25 |
| CN113970774B (en) | 2022-04-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2023116267A1 (en) | Ambiguity fixing method for navigation system, chip, device, and transportation | |
| Wang et al. | Assistant vehicle localization based on three collaborative base stations via SBL-based robust DOA estimation | |
| CN112986903B (en) | A wireless sensing method and device assisted by an intelligent reflection plane | |
| CN111123192B (en) | A two-dimensional DOA localization method based on circular array and virtual expansion | |
| CN109477900A (en) | Estimation of Inter-Frequency Bias for Ambiguity Resolution in GNSS Receivers | |
| CN111983552B (en) | Nested array rapid DOA estimation method and device based on differential co-array | |
| US20200309896A1 (en) | Indoor positioning method and system and electronic device | |
| CN109116295A (en) | The passive direction finding algorithm of baseline is chosen based on phased array | |
| CN108680912A (en) | A kind of steering vector correlation and the united angle measurement method in local focal | |
| Liu et al. | Antenna array signal direction of arrival estimation on digital signal processor (DSP) | |
| Zhu et al. | Altitude measurement based on terrain matching in VHF array radar | |
| CN110133702A (en) | A method and device for attitude measurement based on orthogonal transformation | |
| RU2615491C1 (en) | Method for simultaneous measuring two angular objective coordinates in review amplitude monopulse radar system with antenna array and digital signal processing | |
| US4387376A (en) | Phase linear interferometer system and method | |
| CN109375163B (en) | High-precision indoor positioning method and terminal | |
| RU2610150C1 (en) | Method of determining ground radio-frequency source coordinates when performing on-board radio-direction finding | |
| CN113504554B (en) | Direction finding method of non-uniform subarray synthetic interferometer based on spaceborne phased array | |
| US20240118404A1 (en) | Method and apparatus for determination of direction of arrival angle | |
| Hu et al. | Multipath-Assisted Ultra-Wideband Vehicle Localization in Underground Parking Environment Using Ray-Tracing | |
| RU2527943C1 (en) | Method of processing signals during multichannel phase-based direction-finding of short-wave radio sources | |
| Yang et al. | A Lagrangian multiplier method for TDOA and FDOA positioning of multiple disjoint sources with distance and velocity correlation constraints | |
| Dong et al. | Indoor robot localization combining feature clustering with wireless sensor network | |
| Poormohammad et al. | Two-dimensional Direction-of-Arrival estimation with a SODA-based 3D Array | |
| CN112083423B (en) | Multi-base sound source high-precision positioning method | |
| RU2614035C1 (en) | One-stage method of decameter range radiation sources direction finding using phased antenna array consisting of mutually orthogonal symmetric horizontal dipoles |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application | Ref document number:22909584 Country of ref document:EP Kind code of ref document:A1 | |
| NENP | Non-entry into the national phase | Ref country code:DE | |
| 122 | Ep: pct application non-entry in european phase | Ref document number:22909584 Country of ref document:EP Kind code of ref document:A1 |