WO2023050544A1 - Cleaning member, cleaning assembly, and robot - Google Patents
Cleaning member, cleaning assembly, and robotDownload PDFInfo
- Publication number
- WO2023050544A1 WO2023050544A1PCT/CN2021/132625CN2021132625WWO2023050544A1WO 2023050544 A1WO2023050544 A1WO 2023050544A1CN 2021132625 WCN2021132625 WCN 2021132625WWO 2023050544 A1WO2023050544 A1WO 2023050544A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- cleaning
- rotation
- diameter
- equal
- long
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images









Classifications
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4036—Parts or details of the surface treating tools
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
Definitions
- the present applicationrelates to the technical field of cleaning equipment, in particular, to a cleaning element, a cleaning component having the cleaning component, and a robot having the cleaning component.
- the cleaning robot in the related artrealizes the cleaning of the ground through the cooperation and rotation of two cleaning parts. Area.
- This applicationaims to solve at least one of the technical problems existing in the prior art. For this reason, the present application proposes a cleaning element, which can avoid areas that cannot be cleaned, and has the advantages of good cleaning effect and the like.
- the applicationalso proposes a cleaning assembly having the cleaning element.
- the applicationalso proposes a robot with the cleaning component.
- a cleaning pieceis proposed, the cleaning piece has a center of rotation, and the outer edge of the section perpendicular to the rotation axis of the cleaning piece is a smooth curve, the The smooth curve is formed by end-to-end connection of multiple curve units with continuously changing derivatives, the distance between two consecutive points on the outer edge and the line connecting the center of rotation is not equal, and there is at least one long path and At least one short path.
- the cleaning piece of the embodiment of the present applicationit is possible to avoid areas that cannot be cleaned, and has the advantages of good cleaning effect and the like.
- the cleaning piece according to the above-mentioned embodiments of the present applicationmay also have the following additional technical features:
- the long diameter and the short diameterare arranged alternately and/or collinearly through the rotation center.
- two adjacent curved unitsare arranged symmetrically with a major axis and/or a minor axis.
- the angles between every two adjacent long diametersare equal, the angles between every adjacent two short diameters are equal, the lengths of each long diameter are equal, and each The short diameters are equal in length.
- the cleaning elementis rotationally symmetrical in a section perpendicular to the rotation axis, and the rotation angle is equal to the included angle between two adjacent long diameters.
- a cleaning assemblyincludes: at least two cleaning parts, the cleaning parts are the cleaning parts according to the embodiment of the first aspect of the application; device, and the driving device is respectively connected with the two cleaning parts to drive the two cleaning parts to rotate.
- the cleaning assembly of the embodiment of the present applicationby using the cleaning member according to the embodiment of the first aspect of the present application, it can avoid areas that cannot be cleaned, and has the advantages of good cleaning effect and the like.
- the distance between the two centers of rotationis always equal.
- the distance between the two rotation centersis equal to the total length of the one long diameter and the one short diameter.
- the rotational angular velocities of the two cleaning elementsare the same but the rotational directions are opposite.
- the value of the reduction of the path length of one of the two cleaning parts from the long diameter to the short diameteris equal to that of the other cleaning part from the short diameter to the short diameter.
- the outer edges of the two cleaning elementsare kept tangent under the driving of the driving device.
- the cleaning assemblyfurther includes a transmission mechanism, the transmission mechanism includes at least two rotating shafts, and the two rotating shafts are respectively connected to the two rotation centers, and the driving device passes through the transmission The mechanism drives the two cleaning elements to rotate.
- a robotis provided, and the robot includes the cleaning component according to the embodiment of the second aspect of the present application.
- the cleaning component according to the embodiment of the second aspect of the present applicationby using the cleaning component according to the embodiment of the second aspect of the present application, it can avoid areas that cannot be cleaned, and has the advantages of good cleaning effect and the like.
- Fig. 1is a schematic structural diagram of a cleaning element according to a specific embodiment of the present application.
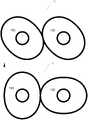
- Fig. 2is a schematic diagram of the rotation process of the cleaning assembly according to a specific embodiment of the present application.
- Fig. 3is a schematic structural diagram of a cleaning element according to another specific embodiment of the present application.
- Fig. 4is a schematic diagram of the rotation process of the cleaning assembly according to another specific embodiment of the present application.
- Fig. 5is a schematic structural diagram of a cleaning element according to another specific embodiment of the present application.
- Fig. 6is a schematic diagram of the rotation process of the cleaning assembly according to another specific embodiment of the present application.
- Fig. 7is a schematic structural diagram of a cleaning element according to another specific embodiment of the present application.
- Fig. 8is a schematic diagram of the rotation process of the cleaning assembly according to another specific embodiment of the present application.
- Fig. 9is a schematic structural diagram of a cleaning element according to another specific embodiment of the present application.
- Fig. 10is a schematic diagram of the rotation process of the cleaning assembly according to another specific embodiment of the present application.
- cleaning assembly 1cleaning assembly 1 , cleaning piece 10 , rotating shaft 100 , rotation center 110 , cleaning main body 200 , curved unit 201 , long diameter 210 , and short diameter 220 .
- the cleaning robot in the related artrealizes the cleaning of the ground through the cooperative rotation of two cleaning parts.
- the shape of the cleaning partsis circular or polygonal, but there are easy gaps between the cleaning parts, resulting in areas that cannot be cleaned.
- the cleaningis achieved through the complementary cooperation of the two cleaning parts, and the intention is to use the longer part of one of the cleaning parts to make up for the shorter part of the other cleaning part, which can reduce the gaps that cannot be cleaned to a certain extent .
- the top corners of the Leroy polygonneed to be rounded, so that it is still difficult for the two cleaning parts to fit tightly, and it is still difficult to avoid the gap that cannot be cleaned.
- part of the cleaning partsalso use a complementary manner similar to the Leroy polygon, which is generally a regular polygon, to achieve cleaning, but it is difficult to avoid gaps between the two cleaning parts.
- the cleaning parts in the related artonly consider the complementary cleaning of the two cleaning parts during the rotation process, and the two cleaning parts will locally produce gaps or local interference during the rotation process, which may easily lead to uncleaned surfaces. area, or when there is interference, it is easy to cause local deformation and warping of the cleaning parts, resulting in a sudden increase in motor resistance, unstable motor operating power, reduced service life of the motor, and reduced service life of the cleaning unit.
- the inventors of the present applicationhave found through a lot of research that the cause of the above problems is caused by the curvature setting of the edge shape of the cleaning element in the related art.
- connectionshould be understood in a broad sense, for example, it can be a fixed connection or a detachable connection. Connected, or integrally connected; it can be mechanically connected or electrically connected; it can be directly connected or indirectly connected through an intermediary, and it can be the internal communication of two components. Those of ordinary skill in the art can understand the specific meanings of the above terms in this application in specific situations.
- the cleaning element 10has a center of rotation 110, and the outer edge of the cleaning element 10 is a smooth curve in a section perpendicular to its axis of rotation, and the smooth curve is continuously changed by multi-segment derivatives
- the curved units 201are connected end to end, the distance between two consecutive points on the outer edge and the center of rotation 110 is not equal, and there is at least one long axis 210 and at least one short axis 220 between the outer edge and the center of rotation 110 .
- the length of the short diameter 220is smaller than the length of the long diameter 210 .
- Reroux polygonis generally a regular polygon, but its edges are not continuous guideable curves, and non-curved corners are formed at its vertices.
- the curve unit 201is a curve between the short axis 220 and the next long axis 210 or a curve between the long axis 210 and the next short axis 220 .
- the number of curved units 201is the sum of the number of long diameters 210 and short diameters 220 .
- the cleaning piece 10 of the embodiment of the present applicationby making the distance between two consecutive points on the outer edge of the cleaning piece 10 and the center of rotation 110 unequal, and there is at least one long diameter 210 and At least one short diameter 220, compared with the technical solution of the circular cleaning part in the related art, the part of the long diameter 210 of one of the cleaning parts 10 can be used to make up the part of the short diameter 220 of the other cleaning part 10, so that the two cleaning parts 10 Complementary and coordinated rotation for cleaning, reducing gaps that cannot be cleaned due to manufacturing errors.
- the two cleaning parts 10have been able to form a complementary cleaning method, compared with the technical solution of the circular cleaning parts in the related art, the two cleaning parts 10 do not need to squeeze each other, which can reduce the rotation resistance of the cleaning parts 10, so that The cleaning piece 10 rotates more smoothly, and it can avoid the deformation and offset of the rotation center 110 due to long-term use, and avoid the cleaning piece 10 from tilting; in addition, it can avoid the different degrees of wear on the extrusion part of the cleaning piece due to long-term use, This results in eccentric vibration of the cleaning parts when rotating, which in turn leads to unstable movement of the robot, positioning deviation, and phase blurring of the image acquisition equipment.
- the applicant of the present applicationhas found through a lot of research that if there is a straight line or a non-continuous guideline on the outer edge of the cleaning element 10, the two cleaning elements 10 will easily produce a gap when they are complementary.
- the outer edge of the section perpendicular to the axis of rotation of the cleaning element 10is a smooth curve, which is formed by the end-to-end connection of multiple curve units 201 with continuously changing derivatives, so that the two cleaning elements 10 can be aligned at any time when they complement each other. Keep fit to avoid gaps between the two cleaning elements 10 when they are rotated in complementary fit, thereby avoiding areas that cannot be cleaned. The cleaning effect of the cleaning element 10 can thus be increased.
- the cleaning element 10 according to the embodiment of the present applicationcan avoid areas that cannot be cleaned, and has the advantages of good cleaning effect and the like.
- the long diameters 210 and the short diameters 220are arranged alternately and/or collinearly through the center of rotation 110 .
- the two cleaning elements 10can cooperate with each other to realize the complementarity of the long diameter 210 and the short diameter 220 , so as to avoid areas that cannot be cleaned.
- two adjacent curved units 201are arranged symmetrically with the major axis 210 and/or the minor axis 220 . This can facilitate the control of the distance between the two cleaning parts 10 when they rotate, and facilitate the complementarity of the long diameter 210 and the short diameter 220 of the two cleaning parts 10 through mutual cooperation.
- the two cleaning elements 10can cooperate with each other to realize the complementarity of the long diameter 210 and the short diameter 220 , so as to avoid areas that cannot be cleaned.
- the decrease in the path length of a curved unit 201 from the long axis 210 to the short axis 220is equal to the increase in the path length of an adjacent curved unit 201 from the short axis 220 to the long axis 210 .
- the cleaning element 10is rotationally symmetrical in a section perpendicular to the rotation axis, and the rotation angle is equal to the included angle between two adjacent long diameters 210 .
- the plurality of curve units 201are the same. This can further facilitate the complementarity of the long diameter 210 and the short diameter 220 of the two cleaning elements 10 through mutual cooperation, further avoiding the generation of areas that cannot be cleaned.
- the cleaning member 10includes a rotating shaft 100 and a cleaning body 200 .
- the rotation center 110 of a cleaning element 10 with a long diameter 210is not located at the center of size, and its shape is not completely circular. In this way, a certain degree of complementary cleaning can be achieved, and gaps between the two cleaning parts 10 can be avoided during rotation, and the shape is simple and beautiful, which is convenient for processing and manufacturing.
- the cleaning element 10 with two long diameters 210is elliptical, and its rotation axis is located at the center of the dimension. In this way, compared with the embodiment of one long diameter 210, the alternating frequency of the long diameter 210 and the short diameter 220 can be increased, and the cleaning effect can be improved.
- the cleaning element 10 with three long diameters 210is generally triangular in shape, and its rotation axis is located at its dimensional center. In this way, compared with the embodiment of two long diameters 210, the alternating frequency of the long diameter 210 and the short diameter 220 can be increased, and the cleaning effect can be improved.
- the cleaning element 10 with four long diameters 210is generally quadrangular in shape, and its rotation axis is located at its dimensional center. In this way, compared with the embodiment of three long diameters 210, the alternating frequency of the long diameters 210 and the short diameters 220 can be increased, and the cleaning effect can be improved.
- the cleaning element 10 with five long diameters 210is generally pentagonal in shape, and its rotation axis is located at its dimensional center. In this way, compared with the embodiment of four long diameters 210, the alternating frequency of the long diameters 210 and the short diameters 220 can be increased, and the cleaning effect can be improved.
- the alternating frequency of the long diameters 210 and short diameters 220increases, which is beneficial to improve the cleaning effect.
- the number of long diameter 210/short diameter 220is positively correlated with the absolute value of the change value of the curve unit 201 from the rotation center within a unit angle, that is, the more the number of long diameter 210/short diameter 220 , the smaller the angle between the major diameter 210 and the minor diameter 220 is.
- the major diameter 210 and the minor diameter 220are collinear.
- two opposite long diameters 210are collinear
- two opposite short diameters 220are collinear
- the long diameter 210 and the short diameterare not collinear. In this way, for the embodiment in which the long diameter 210 is an even number, its arrangement state is not as neat as the embodiment in which the long diameter 210 is an odd number.
- the length of the long diameter 210is 60-100 mm, and the length of the short diameter 220 is 40-80 mm.
- the cleaning piece 10can have a reasonable size, and the change of the long diameter 210 and the short diameter 220 will not be too large or too small, so as to facilitate the rotation of the cleaning piece 10 while ensuring that the cleaning piece 10 is matched alternately.
- the cleaning assembly 1 according to the embodiment of the present applicationis described below.
- the cleaning assembly 1 according to the embodiment of the present applicationincludes at least two cleaning elements and a driving device.
- the cleaning piece 10is the cleaning piece 10 according to the above-mentioned embodiments of the present application.
- the driving deviceis respectively connected to the two cleaning parts 10 in transmission to drive the two cleaning parts 10 to rotate.
- the cleaning assembly 1 of the embodiment of the present applicationby using the cleaning member 10 according to the above-mentioned embodiments of the present application, it is possible to avoid areas that cannot be cleaned, and has the advantages of good cleaning effect and the like.
- the distance between the two rotation centers 110is always equal.
- the two cleaning parts 10can be kept in close contact during the rotation process, and the distance between the rotation centers 110 can be avoided from being deformed and displaced.
- the distance between the two rotation centers 110is equal to the total length of a long diameter 210 and a short diameter 220 .
- the long diameter 210 of one of the cleaning parts 10can be used to make up for the short diameter 220 of the other cleaning part 10, so as to keep the cleaning parts 10 in close contact during rotation.
- the rotational angular velocities of the two cleaning elements 10have the same value but opposite rotational directions.
- the long diameter 210 of one of the two cleaning parts 10is always aligned with the short diameter 220 of the other during the rotation process, so as to ensure that the two cleaning parts 10 are in close contact during the rotation process.
- the path length of one of the two cleaning parts 10 from the long diameter 210 to the short diameter 220decreases
- the decreasing value of the path length in the processis equal to the increasing value of the path length in the process of increasing the path length of another cleaning element 10 from the short diameter 220 to the long diameter 210 .
- the increase of the path length of one of the cleaning parts 10can compensate for the decrease of the path length of the other cleaning part 10, thereby ensuring the path length between the two cleaning parts 10 all the time.
- the sumsare equal to ensure that the two cleaning parts 10 are closely matched.
- the outer edges of the two cleaning elements 10are kept tangent under the driving of the driving device. In this way, it can be ensured that the two cleaning elements 10 are kept in tight fit all the time during the rotation process.
- the cleaning assembly 1further includes a transmission mechanism. They are connected to the two rotation centers 110 respectively, and the driving device drives the two cleaning parts 10 to rotate through the transmission mechanism.
- the transmission mechanismalso includes a reduction gear set.
- the driving devicemay include a motor, and one motor drives two rotating shafts 100 respectively through a reduction gear set.
- the driving devicemay include two motors, and the two motors respectively drive the two rotating shafts 100 through two reduction gear sets.
- the long diameter 210 of one of the two cleaning elements 10can be used to complement the short diameter 220 of the other cleaning element 10, so as to avoid gaps that cannot be cleaned.
- the sum of the distances from the edges of the two cleaning elements 10 passing through the plane between the rotation axes of the two cleaning elements 10 to the rotation axisis equal at all times. Avoid crevices that cannot be cleaned.
- the robot according to the embodiment of the present applicationincludes the cleaning assembly 1 according to the above-mentioned embodiment of the present application.
- the cleaning assembly 1according to the above-mentioned embodiment of the present application, it can avoid areas that cannot be cleaned, and has the advantages of good cleaning effect and the like.
- references to the terms “one embodiment,” “some embodiments,” “exemplary embodiments,” “example,” “specific examples,” or “some examples”are intended to mean that the implementation A specific feature, structure, material, or characteristic described by an embodiment or example is included in at least one embodiment or example of the present application.
- schematic representations of the above termsdo not necessarily refer to the same embodiment or example.
- the specific features, structures, materials or characteristics describedmay be combined in any suitable manner in any one or more embodiments or examples.
Landscapes
- Nozzles For Electric Vacuum Cleaners (AREA)
- Cleaning In General (AREA)
Abstract
Description
Translated fromChinese相关申请的交叉引用Cross References to Related Applications
本申请基于申请号为202111164749.6,申请日为2021年09月30日的中国专利申请提出,并要求该中国专利申请的优先权,该中国专利申请的全部内容在此引入本申请作为参考。This application is based on a Chinese patent application with application number 202111164749.6 and a filing date of September 30, 2021, and claims the priority of this Chinese patent application. The entire content of this Chinese patent application is hereby incorporated by reference into this application.
本申请涉及清洁设备技术领域,具体而言,涉及一种清洁件、具有所述清洁件的清洁组件和具有所述清洁组件的机器人。The present application relates to the technical field of cleaning equipment, in particular, to a cleaning element, a cleaning component having the cleaning component, and a robot having the cleaning component.
相关技术中的清洁机器人,通过两块清洁件的配合转动实现对地面的清洁,清洁件的形状为圆形或勒洛多边形,但清洁件之间接触不适宜,导致清洁过程中产生清洁不到的区域。The cleaning robot in the related art realizes the cleaning of the ground through the cooperation and rotation of two cleaning parts. Area.
发明内容Contents of the invention
本申请旨在至少解决现有技术中存在的技术问题之一。为此,本申请提出一种清洁件,该清洁件能够避免清洁不到的区域,具有清洁效果好等优点。This application aims to solve at least one of the technical problems existing in the prior art. For this reason, the present application proposes a cleaning element, which can avoid areas that cannot be cleaned, and has the advantages of good cleaning effect and the like.
本申请还提出一种具有所述清洁件的清洁组件。The application also proposes a cleaning assembly having the cleaning element.
本申请还提出一种具有所述清洁组件的机器人。The application also proposes a robot with the cleaning component.
为实现上述目的,根据本申请的第一方面的实施例提出一种清洁件,所述清洁件具有旋转中心,所述清洁件在垂直于其旋转轴线的截面的外边沿为平滑曲线,所述平滑曲线由多段导数连续变化的曲线单元首尾相连围成,所述外边沿连续两点与所述旋转中心连线距离不相等且所述外边沿与所述旋转中心之间存在至少一条长径和至少一条短径。In order to achieve the above object, according to the embodiment of the first aspect of the present application, a cleaning piece is proposed, the cleaning piece has a center of rotation, and the outer edge of the section perpendicular to the rotation axis of the cleaning piece is a smooth curve, the The smooth curve is formed by end-to-end connection of multiple curve units with continuously changing derivatives, the distance between two consecutive points on the outer edge and the line connecting the center of rotation is not equal, and there is at least one long path and At least one short path.
根据本申请实施例的清洁件,能够避免清洁不到的区域,具有清洁效果好等优点。According to the cleaning piece of the embodiment of the present application, it is possible to avoid areas that cannot be cleaned, and has the advantages of good cleaning effect and the like.
另外,根据本申请上述实施例的清洁件还可以具有如下附加的技术特征:In addition, the cleaning piece according to the above-mentioned embodiments of the present application may also have the following additional technical features:
根据本申请的一个实施例,所述长径与所述短径交替设置和/或过所述旋转中心共线设置。According to an embodiment of the present application, the long diameter and the short diameter are arranged alternately and/or collinearly through the rotation center.
根据本申请的一个实施例,相邻两个所述曲线单元以长径和/或短径对称设置。According to an embodiment of the present application, two adjacent curved units are arranged symmetrically with a major axis and/or a minor axis.
根据本申请的一个实施例,每相邻两个所述长径之间的角度相等,每相邻两个所述短径之间的角度相等,每个所述长径的长度相等且每个所述短径的长度相等。According to an embodiment of the present application, the angles between every two adjacent long diameters are equal, the angles between every adjacent two short diameters are equal, the lengths of each long diameter are equal, and each The short diameters are equal in length.
根据本申请的一个实施例,所述清洁件在垂直于所述旋转轴线的截面旋转对称且旋转角等于相邻两个所述长径之间的夹角。According to an embodiment of the present application, the cleaning element is rotationally symmetrical in a section perpendicular to the rotation axis, and the rotation angle is equal to the included angle between two adjacent long diameters.
根据本申请的第二方面的实施例提出一种清洁组件,所述清洁组件包括:至少两个清洁件,所述清洁件为根据本申请的第一方面的实施例所述的清洁件;驱动装置,所述驱动装置分别与两个所述清洁件传动连接以驱动两个所述清洁件转动。According to the embodiment of the second aspect of the application, a cleaning assembly is proposed, the cleaning assembly includes: at least two cleaning parts, the cleaning parts are the cleaning parts according to the embodiment of the first aspect of the application; device, and the driving device is respectively connected with the two cleaning parts to drive the two cleaning parts to rotate.
根据本申请实施例的清洁组件,通过利用根据本申请的第一方面的实施例所述的清洁件,能够避免清洁不到的区域,具有清洁效果好等优点。According to the cleaning assembly of the embodiment of the present application, by using the cleaning member according to the embodiment of the first aspect of the present application, it can avoid areas that cannot be cleaned, and has the advantages of good cleaning effect and the like.
根据本申请的一个实施例,两个所述旋转中心之间的距离始终相等。According to an embodiment of the present application, the distance between the two centers of rotation is always equal.
根据本申请的一个实施例,两个所述旋转中心之间的距离等于所述一条长径与所述一条短径的总长。According to an embodiment of the present application, the distance between the two rotation centers is equal to the total length of the one long diameter and the one short diameter.
根据本申请的一个实施例,两个所述清洁件的转动角速度数值相同但转动方向相反。According to an embodiment of the present application, the rotational angular velocities of the two cleaning elements are the same but the rotational directions are opposite.
根据本申请的一个实施例,相同单位时间内,两个所述清洁件中的一个从长径到短径的径长减少过程中所述径长减少的值等于另一个所述清洁件从短径到长径的径长增大过程中所述径长增长的值。According to an embodiment of the present application, in the same unit of time, the value of the reduction of the path length of one of the two cleaning parts from the long diameter to the short diameter is equal to that of the other cleaning part from the short diameter to the short diameter. The value of the path length increase during the path length increase process from the diameter to the major diameter.
根据本申请的一个实施例,在所述驱动装置的驱动下两个所述清洁件的外边沿保持相切。According to an embodiment of the present application, the outer edges of the two cleaning elements are kept tangent under the driving of the driving device.
根据本申请的一个实施例,所述清洁组件还包括传动机构,所述传动机构至少包括两个转轴,两个所述转轴分别与两个所述旋转中心相连,所述驱动装置通过所述传动机构驱动两个所述清洁件转动。According to an embodiment of the present application, the cleaning assembly further includes a transmission mechanism, the transmission mechanism includes at least two rotating shafts, and the two rotating shafts are respectively connected to the two rotation centers, and the driving device passes through the transmission The mechanism drives the two cleaning elements to rotate.
根据本申请的第三方面的实施例提出一种机器人,所述机器人包括根据本申请的第二方面的实施例所述的清洁组件。According to the embodiment of the third aspect of the present application, a robot is provided, and the robot includes the cleaning component according to the embodiment of the second aspect of the present application.
根据本申请实施例的机器人,通过利用根据本申请的第二方面的实施例所述的清洁组件,能够避免清洁不到的区域,具有清洁效果好等优点。According to the robot of the embodiment of the present application, by using the cleaning component according to the embodiment of the second aspect of the present application, it can avoid areas that cannot be cleaned, and has the advantages of good cleaning effect and the like.
本申请的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到。Additional aspects and advantages of the application will be set forth in part in the description which follows, and in part will be obvious from the description, or may be learned by practice of the application.
本申请的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:The above and/or additional aspects and advantages of the present application will become apparent and easily understood from the description of the embodiments in conjunction with the following drawings, wherein:
图1是根据本申请一个具体实施例的清洁件的结构示意图。Fig. 1 is a schematic structural diagram of a cleaning element according to a specific embodiment of the present application.
图2是根据本申请一个具体实施例的清洁组件的转动过程示意图。Fig. 2 is a schematic diagram of the rotation process of the cleaning assembly according to a specific embodiment of the present application.
图3是根据本申请另一个具体实施例的清洁件的结构示意图。Fig. 3 is a schematic structural diagram of a cleaning element according to another specific embodiment of the present application.
图4是根据本申请另一个具体实施例的清洁组件的转动过程示意图。Fig. 4 is a schematic diagram of the rotation process of the cleaning assembly according to another specific embodiment of the present application.
图5是根据本申请另一个具体实施例的清洁件的结构示意图。Fig. 5 is a schematic structural diagram of a cleaning element according to another specific embodiment of the present application.
图6是根据本申请另一个具体实施例的清洁组件的转动过程示意图。Fig. 6 is a schematic diagram of the rotation process of the cleaning assembly according to another specific embodiment of the present application.
图7是根据本申请另一个具体实施例的清洁件的结构示意图。Fig. 7 is a schematic structural diagram of a cleaning element according to another specific embodiment of the present application.
图8是根据本申请另一个具体实施例的清洁组件的转动过程示意图。Fig. 8 is a schematic diagram of the rotation process of the cleaning assembly according to another specific embodiment of the present application.
图9是根据本申请另一个具体实施例的清洁件的结构示意图。Fig. 9 is a schematic structural diagram of a cleaning element according to another specific embodiment of the present application.
图10是根据本申请另一个具体实施例的清洁组件的转动过程示意图。Fig. 10 is a schematic diagram of the rotation process of the cleaning assembly according to another specific embodiment of the present application.
附图标记:清洁组件1、清洁件10、转轴100、旋转中心110、清洁主体200、曲线单元201、长径210、短径220。Reference numerals:
本申请是基于发明人对以下事实和问题的发现和认识作出的:This application is based on the inventor's discovery and recognition of the following facts and problems:
相关技术中的清洁机器人,通过两块清洁件的配合转动实现对地面的清洁,清洁件的形状为圆形或勒洛多边形,但清洁件之间容易产生缝隙而导致产生清洁不到的区域。The cleaning robot in the related art realizes the cleaning of the ground through the cooperative rotation of two cleaning parts. The shape of the cleaning parts is circular or polygonal, but there are easy gaps between the cleaning parts, resulting in areas that cannot be cleaned.
具体而言,对于圆形的清洁件,配置两个清洁件时,有两种方式,一种是意图使两个清洁件保持相切转动,但容易因清洁件的制造误差导致两个清洁件之间产生缝隙。另一种是配置两个清洁件时使两个清洁件略微形成干涉,两个清洁件相互挤压,避免由于制造误差产生的缝隙,但会导致清洁件转动阻力较大,而且长时间使用容易导致清洁件转动轴线偏移,导致清洁件倾斜。Specifically, for circular cleaning parts, there are two ways to configure two cleaning parts. One is to keep the two cleaning parts in tangential rotation, but it is easy to cause the two cleaning parts to rotate due to manufacturing errors of the cleaning parts. gaps between. The other is to configure two cleaning parts so that the two cleaning parts interfere slightly, and the two cleaning parts squeeze each other to avoid gaps caused by manufacturing errors, but it will cause greater rotational resistance of the cleaning parts, and it is easy to use for a long time Causes the rotation axis of the cleaning element to deviate, causing the cleaning element to tilt.
对于勒洛多边形的清洁件,通过两个清洁件的互补配合实现清洁,意图利用其中一个清洁件的较长的部分弥补另一个清洁件较短的部分,可以一定程度上减少清洁不到的缝隙,勒洛多边形为保证两个清洁件顺畅转动,需要对顶角倒圆角,导致两个清洁件依然难以紧密配合,依然难以避免出现清洁不到的缝隙。For the Leroy polygonal cleaning parts, the cleaning is achieved through the complementary cooperation of the two cleaning parts, and the intention is to use the longer part of one of the cleaning parts to make up for the shorter part of the other cleaning part, which can reduce the gaps that cannot be cleaned to a certain extent , In order to ensure the smooth rotation of the two cleaning parts, the top corners of the Leroy polygon need to be rounded, so that it is still difficult for the two cleaning parts to fit tightly, and it is still difficult to avoid the gap that cannot be cleaned.
此外,部分清洁件也采用类似勒洛多边形的大体为正多边形的互补方式配合实现清洁,但均难以避免两个清洁件之间出现缝隙。In addition, part of the cleaning parts also use a complementary manner similar to the Leroy polygon, which is generally a regular polygon, to achieve cleaning, but it is difficult to avoid gaps between the two cleaning parts.
具体而言,相关技术中的清洁件,仅考虑了两个清洁件在转动过程中的互补清洁,两个清洁件在转动过程中会局部产生间隙或局部出现干涉,容易导致清洁地面出现未清洁区域,或在出现干涉时容易导致清洁件局部变形起翘,导致电机阻力突然增大,电机运行功率不稳定,电机使用寿命减少,清洁单元使用寿命减少。Specifically, the cleaning parts in the related art only consider the complementary cleaning of the two cleaning parts during the rotation process, and the two cleaning parts will locally produce gaps or local interference during the rotation process, which may easily lead to uncleaned surfaces. area, or when there is interference, it is easy to cause local deformation and warping of the cleaning parts, resulting in a sudden increase in motor resistance, unstable motor operating power, reduced service life of the motor, and reduced service life of the cleaning unit.
例如,相关技术中的两个大体为多边形的清洁件,若其中一个的顶点与另一个的边能够刚好紧密配合的情况下,当转动小于其旋转对称角的角度后(如大体为三角形的清洁件转动60度),两个清洁件相互配合时会产生间隙,若缩短两个清洁件的距离使间隙消除,那么当再次转动到其中一个的顶点与另一个的边配合时,两个清洁件会产生干涉。For example, if two generally polygonal cleaning parts in the related art can fit tightly with the edge of the other, when they are rotated at an angle smaller than their rotational symmetry angle (such as a substantially triangular cleaning piece), Parts rotate 60 degrees), when the two cleaning parts cooperate with each other, there will be a gap. If the distance between the two cleaning parts is shortened to eliminate the gap, then when the vertex of one of them is matched with the edge of the other, the two cleaning parts will will interfere.
本申请的发明人经过大量的研究发现,造成上述问题的原因是由于相关技术由于清洁件边沿形状的曲率设置导致的。The inventors of the present application have found through a lot of research that the cause of the above problems is caused by the curvature setting of the edge shape of the cleaning element in the related art.
下面详细描述本申请的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附 图描述的实施例是示例性的,仅用于解释本申请,而不能理解为对本申请的限制。Embodiments of the present application are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals denote the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary only for explaining the present application and should not be construed as limiting the present application.
在本申请的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。此外,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本申请的描述中,除非另有说明,“多个”的含义是两个或两个以上。In the description of the present application, it should be understood that the terms "center", "longitudinal", "transverse", "length", "width", "thickness", "upper", "lower", "front", " Back", "Left", "Right", "Vertical", "Horizontal", "Top", "Bottom", "Inner", "Outer", "Clockwise", "Counterclockwise", "Axial", The orientation or positional relationship indicated by "radial", "circumferential", etc. is based on the orientation or positional relationship shown in the drawings, and is only for the convenience of describing the application and simplifying the description, rather than indicating or implying the referred device or element Must be in a particular orientation, constructed, and operate in a particular orientation, and thus should not be construed as limiting of the application. In addition, the features defined as "first" and "second" may explicitly or implicitly include one or more of these features. In the description of the present application, unless otherwise specified, "plurality" means two or more.
在本申请的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本申请中的具体含义。In the description of this application, it should be noted that unless otherwise specified and limited, the terms "installation", "connection", and "connection" should be understood in a broad sense, for example, it can be a fixed connection or a detachable connection. Connected, or integrally connected; it can be mechanically connected or electrically connected; it can be directly connected or indirectly connected through an intermediary, and it can be the internal communication of two components. Those of ordinary skill in the art can understand the specific meanings of the above terms in this application in specific situations.
下面参考附图描述根据本申请实施例的清洁件10。The
如图1-图10所示,根据本申请实施例的清洁件10具有旋转中心110,清洁件10在垂直于其旋转轴线的截面的外边沿为平滑曲线,所述平滑曲线由多段导数连续变化的曲线单元201首尾相连围成,所述外边沿连续两点与旋转中心110连线距离不相等且所述外边沿与旋转中心110之间存在至少一条长径210和至少一条短径220。As shown in Figures 1 to 10, the cleaning
短径220的长度小于长径210的长度。The length of the
本领域的技术人员可以理解的是,“勒洛多边形”大体为正多边形,但其边沿并非连续可导曲线,在其顶点会形成非曲线的拐角。Those skilled in the art can understand that the "Reroux polygon" is generally a regular polygon, but its edges are not continuous guideable curves, and non-curved corners are formed at its vertices.
这里需要理解的是,曲线单元201为,短径220到下一条长径210之间的曲线或者是长径210到下一条短径220之间的曲线。曲线单元201数量为长径210与短径220数量之和。It should be understood here that the
根据本申请实施例的清洁件10,通过使清洁件10的所述外边沿连续两点与旋转中心110连线距离不相等且所述外边沿与旋转中心110之间存在至少一条长径210和至少一条短径220,相比相关技术中圆形清洁件的技术方案,可以利用其中一个清洁件10的长径210的部分弥补另一个清洁件10的短径220的部分,使两个清洁件10互补配合转动进行清洁,减少由于制造误差导致产生清洁不到的缝隙。According to the
并且,由于两个清洁件10已经能够形成配合互补的清洁方式,相比相关技术中圆形清洁件的技术方案,两个清洁件10无需相互挤压,可以减少清洁件10的转动阻力,使清洁件10转动更加顺畅,而且可以避免由于长时间使用导致旋转中心110发生变形偏移,避免清洁件10发生倾斜;另外,可以避免由于长时间使用导致清洁件挤压部分产生不同 程度的磨损,导致清洁件在旋转时产生偏心抖动,进而导致机器人行进不稳、定位偏差和图像获取设备成相模糊等情况。Moreover, since the two cleaning
此外,本申请的申请人经过大量的研究发现,若清洁件10的外边沿存在直线、或非连续可导的曲线,两个清洁件10在互补配合时易产生缝隙,本申请通过使清洁件10清洁件10在垂直于其旋转轴线的截面的外边沿为平滑曲线,所述平滑曲线由多段导数连续变化的曲线单元201首尾相连围成,可以使两个清洁件10在互补配合时能够时刻保持贴合,避免两个清洁件10之间在互补配合转动时产生缝隙,从而避免产生清洁不到的区域。由此可以提高清洁件10的清洁效果。In addition, the applicant of the present application has found through a lot of research that if there is a straight line or a non-continuous guideline on the outer edge of the
因此,根据本申请实施例的清洁件10能够避免清洁不到的区域,具有清洁效果好等优点。Therefore, the cleaning
下面参考附图描述根据本申请具体实施例的清洁件10。The
有利地,如图1-图10所示,长径210与短径220交替设置和/或过旋转中心110共线设置。这样可以利于两个清洁件10通过相互配合实现长径210和短径220的互补,避免产生清洁不到的区域。Advantageously, as shown in FIGS. 1-10 , the
更为有利地,如图1-图10所示,相邻两个曲线单元201以长径210和/或短径220对称设置。这样可以便于控制两个清洁件10转动时的距离,利于两个清洁件10通过相互配合实现长径210和短径220的互补。More advantageously, as shown in FIGS. 1-10 , two adjacent
具体地,如图1-图10所示,每相邻两个长径210之间的角度相等,每相邻两个短径220之间的角度相等,每个长径210的长度相等且每个短径220的长度相等。这样可以利于两个清洁件10通过相互配合实现长径210和短径220的互补,避免产生清洁不到的区域。Specifically, as shown in Fig. 1-Fig. The lengths of the
更为具体地,任意单元角度内,一个曲线单元201从长径210到短径220方向的径长减少的值等于相邻曲线单元201从短径220到长径210方向的径长增长的值。More specifically, within any unit angle, the decrease in the path length of a
例如,如图1所示,单元角度a=单元角度角度a’,此时径长变化的数值B-b=C-c。For example, as shown in Figure 1, the unit angle a=unit angle a', at this time the value of the path length change B-b=C-c.
更为具体地,如图1-图10所示,清洁件10在垂直于所述旋转轴线的截面旋转对称且旋转角等于相邻两个长径210之间的夹角。具体而言,多个曲线单元201相同。这样可以进一步利于两个清洁件10通过相互配合实现长径210和短径220的互补,进一步避免产生清洁不到的区域。More specifically, as shown in FIGS. 1-10 , the cleaning
具体而言,清洁件10包括转轴100和清洁主体200。Specifically, the cleaning
在本申请的一个具体实施例中,如图9和图10所示,一条长径210的清洁件10,其旋转中心110并非位于尺寸中心,其形状也不是完全的圆形。这样可以实现一定程度的互补清洁,在转动过程中避免两个清洁件10之间产生缝隙,而且形状简洁美观,便于加工制造。In a specific embodiment of the present application, as shown in FIG. 9 and FIG. 10 , the
在本申请的另一个具体实施例中,如图7和图8所示,两条长径210的清洁件10, 其为椭圆形,其转动轴线位于尺寸中心。这样相较一条长径210的实施方式可以提高长径210和短径220的交替频率,提高清洁效果。In another specific embodiment of the present application, as shown in FIG. 7 and FIG. 8 , the cleaning
在本申请的另一个具体实施例中,如图5和图6所示,三条长径210的清洁件10,其形状大体为三角形,其转动轴线位于其尺寸中心。这样相较两条长径210的实施方式可以提高长径210和短径220的交替频率,提高清洁效果。In another specific embodiment of the present application, as shown in FIG. 5 and FIG. 6 , the cleaning
在本申请的另一个具体实施例中,如图3和图4所示,四条长径210的清洁件10,其形状大体为四边形,其转动轴线位于其尺寸中心。这样相较三条长径210的实施方式可以提高长径210和短径220的交替频率,提高清洁效果。In another specific embodiment of the present application, as shown in FIG. 3 and FIG. 4 , the cleaning
在本申请的另一个具体实施例中,如图1和图2所示,五条长径210的清洁件10,其形状大体为五边形,其转动轴线位于其尺寸中心。这样相较四条长径210的实施方式可以提高长径210和短径220的交替频率,提高清洁效果。In another specific embodiment of the present application, as shown in FIG. 1 and FIG. 2 , the cleaning
总而言之,当清洁件10的长径210数量增多时,其长径210和短径220交替频率提高,有利于提高清洁效果。清洁件10长径210与短径220相同时,长径210/短径220数量与单位角度内曲线单元201距离旋转中心变化值的绝对值正相关,既长径210/短径220数量越多,由长径210与短径220夹角越小。In a word, when the number of
另外,长径210为奇数的实施方式,长径210为一个、三个和五个的实施方式,其长径210与短径220共线。长径210位偶数的实施方式,其两个相对的长径210共线,两个相对的短径220共线,而长径210和短径不共线。这样对于长径210为偶数的实施方式,其摆放状态不如长径210位奇数的实施方式整齐。In addition, in the embodiment in which the
此外,长径210的数量越多,由于清洁件面积收到清洁机器人限制,且为了保证两个清洁件10在转动过程中始终相切,长径210与短径220的长度差值需缩小,会导致互补清洁的效果降低。In addition, the larger the number of
可选地,长径210的长度为60-100毫米,短径220的长度为40-80毫米。这样可以使清洁件10具有合理的尺寸,而且可以使长径210和短径220的变化不会过大或过小,以在保证清洁件10交替配合的情况下便于清洁件10的转动。Optionally, the length of the
下面描述根据本申请实施例的清洁组件1。根据本申请实施例的清洁组件1包括至少两个清洁件和驱动装置。The cleaning
清洁件10为根据本申请上述实施例的清洁件10。所述驱动装置分别与两个清洁件10传动连接以驱动两个清洁件10转动。The
根据本申请实施例的清洁组件1,通过利用根据本申请上述实施例的清洁件10,能够避免清洁不到的区域,具有清洁效果好等优点。According to the
具体地,如图2、图4、图6、图8和图10所示,两个旋转中心110之间的距离始终相等。这样一方面可以便于两个清洁件10在转动过程中保持紧密贴合,而且可以避免旋转中心110之间的距离变化导致清洁件10变形移位。Specifically, as shown in FIG. 2 , FIG. 4 , FIG. 6 , FIG. 8 and FIG. 10 , the distance between the two
更为具体地,如图2、图4、图6、图8和图10所示,两个旋转中心110之间的距离等于一条长径210与一条短径220的总长。这样可以利用其中一个清洁件10的长径210弥补另一个清洁件10的短径220,保持清洁件10在转动过程中紧密贴合。More specifically, as shown in FIG. 2 , FIG. 4 , FIG. 6 , FIG. 8 and FIG. 10 , the distance between the two
有利地,两个清洁件10的转动角速度数值相同但转动方向相反。这样可以便于两个清洁件10在转动过程中其中一个的长径210始终与另一个的短径220对齐,从而保证两个清洁件10在转动过程中紧密贴合。Advantageously, the rotational angular velocities of the two
更为有利地,如图2、图4、图6、图8和图10所示,相同单位时间内,两个清洁件10中的一个清洁件从长径210到短径220的径长减少过程中所述径长减少的值等于另一个清洁件10从短径220到长径210的径长增大过程中所述径长增长的值。这样可以使两个清洁件10在转动过程中,其中一个清洁件10的径长的增长变化弥补另一个清洁件10的径长的减少变化,从而始终保证两个清洁件10之间的径长之和相等,保证两个清洁件10紧密配合。More advantageously, as shown in Fig. 2, Fig. 4, Fig. 6, Fig. 8 and Fig. 10, in the same unit of time, the path length of one of the two cleaning
进一步地,如图2、图4、图6、图8和图10所示,在所述驱动装置的驱动下两个清洁件10的外边沿保持相切。这样可以保证两个清洁件10在转动过程中时刻保持紧密配合。Further, as shown in FIG. 2 , FIG. 4 , FIG. 6 , FIG. 8 and FIG. 10 , the outer edges of the two
在本申请的一些具体示例中,如图2、图4、图6、图8和图10所示,清洁组件1还包括传动机构,所述传动机构至少包括两个转轴100,两个转轴100分别与两个旋转中心110相连,所述驱动装置通过所述传动机构驱动两个清洁件10转动。In some specific examples of the present application, as shown in FIG. 2 , FIG. 4 , FIG. 6 , FIG. 8 and FIG. 10 , the cleaning
所述传动机构还包括减速齿轮组。The transmission mechanism also includes a reduction gear set.
在一个具体实施例中,所述驱动装置可以包括一个电机,一个电机通过减速齿轮组分别驱动两个转轴100。In a specific embodiment, the driving device may include a motor, and one motor drives two
在另一个具体实施例中,所述驱动装置可以包括两个电机,两个电机分别通过两个减速齿轮组驱动两个转轴100。In another specific embodiment, the driving device may include two motors, and the two motors respectively drive the two
这样可以实现对两个清洁件10的转动驱动。This makes it possible to drive the two
具体地,在清洁件10转动过程中,两个清洁件10中的一个的长径210和另一个的短径220。这样可以利用一个清洁件10的长径210对另一个清洁件10的短径220进行互补,避免产生清洁不到的缝隙。Specifically, during the rotation of the
进一步地,在清洁件10转动过程中,经过两个清洁件10转动轴线之间的平面的两个清洁件10的边沿距离转动轴线的距离之和时刻相等。避免产生清洁不到的缝隙。Further, during the rotation process of the
下面描述根据本申请实施例的机器人。根据本申请实施例的机器人包括根据本申请上述实施例的清洁组件1。A robot according to an embodiment of the present application is described below. The robot according to the embodiment of the present application includes the cleaning
根据本申请实施例的机器人,通过利用根据本申请上述实施例的清洁组件1,能够避免清洁不到的区域,具有清洁效果好等优点。According to the robot of the embodiment of the present application, by using the
根据本申请实施例的机器人的其他构成以及操作对于本领域普通技术人员而言都是 已知的,这里不再详细描述。Other constitutions and operations of the robot according to the embodiment of the present application are known to those of ordinary skill in the art, and will not be described in detail here.
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本申请的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。In the description of this specification, references to the terms "one embodiment," "some embodiments," "exemplary embodiments," "example," "specific examples," or "some examples" are intended to mean that the implementation A specific feature, structure, material, or characteristic described by an embodiment or example is included in at least one embodiment or example of the present application. In this specification, schematic representations of the above terms do not necessarily refer to the same embodiment or example. Furthermore, the specific features, structures, materials or characteristics described may be combined in any suitable manner in any one or more embodiments or examples.
尽管已经示出和描述了本申请的实施例,本领域的普通技术人员可以理解:在不脱离本申请的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本申请的范围由权利要求及其等同物限定。Although the embodiments of the present application have been shown and described, those skilled in the art can understand that various changes, modifications, substitutions and variations can be made to these embodiments without departing from the principle and spirit of the present application. The scope of the application is defined by the claims and their equivalents.
Claims (13)
Translated fromChineseApplications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111164749.6 | 2021-09-30 | ||
| CN202111164749.6ACN113892878A (en) | 2021-09-30 | 2021-09-30 | Cleaning member, cleaning assembly and robot |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023050544A1true WO2023050544A1 (en) | 2023-04-06 |
Family
ID=79189885
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/CN2021/132625CeasedWO2023050544A1 (en) | 2021-09-30 | 2021-11-24 | Cleaning member, cleaning assembly, and robot |
Country Status (2)
| Country | Link |
|---|---|
| CN (1) | CN113892878A (en) |
| WO (1) | WO2023050544A1 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114680749B (en)* | 2022-03-21 | 2023-03-21 | 广东工业大学 | A deformable brush and its cleaning device and method |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108903847A (en)* | 2018-08-28 | 2018-11-30 | 云鲸智能科技(东莞)有限公司 | Mopping part, mopping device and clean robot |
| US20190038107A1 (en)* | 2017-08-07 | 2019-02-07 | Lg Electronics Inc. | Robot cleaner |
| CN211609615U (en)* | 2019-12-24 | 2020-10-02 | 江苏美的清洁电器股份有限公司 | Floor sweeping robot |
| US20210093145A1 (en)* | 2019-09-26 | 2021-04-01 | Lg Electronics Inc. | Robot cleaner |
| CN113425201A (en)* | 2021-07-05 | 2021-09-24 | 广州科语机器人有限公司 | Mop assembly, mop device and cleaning robot |
| CN113509110A (en)* | 2021-04-09 | 2021-10-19 | 美智纵横科技有限责任公司 | Mopping device, cleaning robot and motion control method |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6223383B1 (en)* | 1998-02-27 | 2001-05-01 | Vanputten Theron A. | Cleaning and polishing pad for floors and the like |
| DE102009057139A1 (en)* | 2009-12-08 | 2011-06-09 | Bayer Technology Services Gmbh | Process for the construction of corotating, moving bodies in the same direction |
| US20210016408A1 (en)* | 2018-04-04 | 2021-01-21 | Husqvarna Ab | Transmission Arrangement for a Floor Surfacing Machine Comprising a First and Second Idle Pulley, Both Pivotable Around a Common Pivot Axis |
| CN110477820B (en)* | 2019-08-16 | 2021-11-16 | 云鲸智能科技(东莞)有限公司 | Obstacle following cleaning method for cleaning robot, and storage medium |
- 2021
- 2021-09-30CNCN202111164749.6Apatent/CN113892878A/enactivePending
- 2021-11-24WOPCT/CN2021/132625patent/WO2023050544A1/ennot_activeCeased
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20190038107A1 (en)* | 2017-08-07 | 2019-02-07 | Lg Electronics Inc. | Robot cleaner |
| CN108903847A (en)* | 2018-08-28 | 2018-11-30 | 云鲸智能科技(东莞)有限公司 | Mopping part, mopping device and clean robot |
| US20210093145A1 (en)* | 2019-09-26 | 2021-04-01 | Lg Electronics Inc. | Robot cleaner |
| CN211609615U (en)* | 2019-12-24 | 2020-10-02 | 江苏美的清洁电器股份有限公司 | Floor sweeping robot |
| CN113509110A (en)* | 2021-04-09 | 2021-10-19 | 美智纵横科技有限责任公司 | Mopping device, cleaning robot and motion control method |
| CN113425201A (en)* | 2021-07-05 | 2021-09-24 | 广州科语机器人有限公司 | Mop assembly, mop device and cleaning robot |
Also Published As
| Publication number | Publication date |
|---|---|
| CN113892878A (en) | 2022-01-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8556607B2 (en) | Screw rotor | |
| US11944247B2 (en) | Mopping member, mopping apparatus, cleaning robot, and control method for cleaning robot | |
| WO2023050544A1 (en) | Cleaning member, cleaning assembly, and robot | |
| US11008806B2 (en) | Window shade system using adjustable angle gear | |
| JP2009210329A (en) | Volumetric flowmeter and helical gear | |
| JP6193213B2 (en) | Rotor formed using involute curves | |
| CN105443598B (en) | CV joint | |
| JP2005163566A (en) | Improvement of screw rotor tooth form | |
| JP2021124145A (en) | Deflection engagement type gear device | |
| JP5674044B2 (en) | Internal gear pump | |
| JP6833222B2 (en) | Schmidt coupling | |
| CN111450726A (en) | High-efficient horizontal biax axial flow continuous stirring ware | |
| WO2010072138A1 (en) | Oblique star wheel single screw compressor | |
| TWI633245B (en) | A harmonic drive | |
| CN118574998A (en) | Single-shaft eccentric screw pump | |
| JP2004044685A (en) | Inscribed engagement planetary gear mechanism | |
| CN114233827B (en) | Cam mechanism | |
| JP7755536B2 (en) | power transmission device | |
| CN118974438A (en) | Power transmission device | |
| CN218018592U (en) | Joint assembly, mechanical arm and mechanical equipment | |
| CN117075391A (en) | Display device, manufacturing method thereof and friction alignment device | |
| CN113304652B (en) | Planetary triaxial mixer | |
| CN116061239A (en) | Built-in three-stroke high-frequency vibration cutting tool | |
| CN116526715A (en) | Rotor core and rotor assembly, motor | |
| CN117046978A (en) | Stretching assembly and stretching device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application | Ref document number:21959105 Country of ref document:EP Kind code of ref document:A1 | |
| NENP | Non-entry into the national phase | Ref country code:DE | |
| 32PN | Ep: public notification in the ep bulletin as address of the adressee cannot be established | Free format text:NOTING OF LOSS OF RIGHTS PURSUANT TO RULE 112(1) EPC (EPO FORM 1205A DATED 16/08/2024) | |
| 122 | Ep: pct application non-entry in european phase | Ref document number:21959105 Country of ref document:EP Kind code of ref document:A1 |