WO2023022458A1 - Ship equipped with balancer - Google Patents
Ship equipped with balancerDownload PDFInfo
- Publication number
- WO2023022458A1 WO2023022458A1PCT/KR2022/012158KR2022012158WWO2023022458A1WO 2023022458 A1WO2023022458 A1WO 2023022458A1KR 2022012158 WKR2022012158 WKR 2022012158WWO 2023022458 A1WO2023022458 A1WO 2023022458A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- balancer
- vibration
- phase
- ship
- zbe
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images





Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H21/00—Use of propulsion power plant or units on vessels
- B63H21/30—Mounting of propulsion plant or unit, e.g. for anti-vibration purposes
- B63H21/302—Mounting of propulsion plant or unit, e.g. for anti-vibration purposes with active vibration damping
- B—PERFORMING OPERATIONS; TRANSPORTING
- B63—SHIPS OR OTHER WATERBORNE VESSELS; RELATED EQUIPMENT
- B63H—MARINE PROPULSION OR STEERING
- B63H21/00—Use of propulsion power plant or units on vessels
- B63H21/30—Mounting of propulsion plant or unit, e.g. for anti-vibration purposes
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16F—SPRINGS; SHOCK-ABSORBERS; MEANS FOR DAMPING VIBRATION
- F16F15/00—Suppression of vibrations in systems; Means or arrangements for avoiding or reducing out-of-balance forces, e.g. due to motion
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16F—SPRINGS; SHOCK-ABSORBERS; MEANS FOR DAMPING VIBRATION
- F16F15/00—Suppression of vibrations in systems; Means or arrangements for avoiding or reducing out-of-balance forces, e.g. due to motion
- F16F15/002—Suppression of vibrations in systems; Means or arrangements for avoiding or reducing out-of-balance forces, e.g. due to motion characterised by the control method or circuitry
Definitions
- the present inventionrelates to a ship equipped with a vibration attenuator for damping vibration of a ship's hull structure generated by an engine, a propeller, and the like.
- Trial operationwhich checks and adjusts the condition of the ship after the ship is built, usually takes several days (eg, 3 to 4 days). Therefore, there is a problem in that the technician performing the above procedures 1) to 3) has to wait in the ship for several days after the work is finished until the test run of the ship is completed.
- Patent Document 1Application No. 10-2019-0089092 (hereinafter, “092 Patent”)
- Patent Document 2Application No. 10-2012-0135635 (hereinafter, “Patent 635”)
- Patent Document 3Application No. 10-2012-0018031 (hereinafter “031 Patent”)
- Patent Document 4Application No. 10-2001-0040945 (hereinafter “945 Patent”)
- Patent Document 5Application No. 10-1995-0705935 (hereinafter, “935 Patent”)
- Non-Patent Document 1Dae-Seung Cho, Tae-Muk Choi et al., August 2004, “A Study on the Practical Use of an Active Control System to Reduce Ship Superstructure Vibration”, Journal of the Society of Naval Architects of Korea , Vol. 41, no. 4, p. 77-84. (Hereinafter, “Citation 1”)
- the present inventionis to solve the problems of the prior art, and an object of the present invention is to provide a ship equipped with a vibration damper that automatically finds the optimum phase and control order.
- the vibration damperin a ship equipped with a vibration damper according to the present invention, includes a motor for rotating an eccentric mass; Means for measuring the rotational speed (E_RPM) of the engine and the rotational speed (B_RPM) of the balancer; means for detecting the zero phase (ZE) of the engine and the zero phase (ZB) of the balancer; And a control means for changing the phase (ZBE) of the balancer with respect to the phase (ZE) of the engine per unit time by a predetermined value (degree / sec); including, the rotation of the ship main engine (M / E) When the speed is higher than a predetermined value, the motor starts operating to reduce the vibration of the ship, and at this time, the rotational speed (B_RPM) of the balancer sets the phase (ZBE) of the balancer [predetermined value per unit time (degree/sec)] to be "sliding rotation speed (PS_RPM)" that changes in "one direction (eg, decrease)
- P_RPMsliding rotation speed
- the vibration magnitude (Vib) of the shipis greater than the vibration magnitude (vib_un) before operating the balancer.
- the phase (ZBE) of the balancerchanges per unit time (degree / sec) with a predetermined value in the other direction (eg “increase”); this is preferable
- the vibration magnitude (Vib) of the shipis greater than the vibration magnitude (Vib_un) before operating the balancer. If it becomes small, at this time, performing a "fine-tuning step” [finely adjusting the phase of the balancer to find the optimal phase (ZBE_opt)] near the balancer phase (ZBE); this is preferable
- the vibration signal in the time domainis converted into a signal in the frequency domain; [Dividing the frequency (FFT_Freq) having the maximum value in the frequency domain signal by the rotational speed (E_Hz) of the main engine (M/E) of the ship] Obtaining the control order (n) of ship vibration; this is preferable
- 1is a diagram explaining that vibration can be reduced and increased.
- Figure 2is an example showing the magnitude of vibration of the ship according to the phase of the balancer.
- 3is an example showing the effect of the balancer for each rotational speed of the main engine (M/E).
- the present inventionrelates to a ship equipped with a vibration damper for damping vibration of a hull structure generated by a ship's engine, propeller, etc. More specifically, it relates to a ship equipped with a vibration attenuator for generating vibration of a phase opposite to that of the hull, supplying the vibration to the hull, and attenuating or removing the vibration.
- the present inventionwill be described on the premise of using a vibration damper (hereinafter also referred to as a “balancer”) of fixed eccentricity or variable eccentricity. Since the balancer has been introduced in many prior arts such as the “031 patent” and the “945 patent”, detailed descriptions will be omitted. For reference, the vibration generated from the balancer is a single frequency.
- vibrations (VE1) and (VE2)are vibrations of the ship when the balancer is not used.
- vibrations (VB1) and (VB2)are vibrations generated in the balancer.
- the sum of ship vibrations (VE1) (VE2) and vibrations (VB1) (VB2) generated by the balancerbecomes ship vibration (V1) (V2). It is hoped that the ship vibration will be reduced like (V1) by the balancer, but the ship vibration may be increased like (V2).
- the vibration acceleration of the ship when not using a balanceris approximately 1.6 gal. 2)
- the maximum vibration acceleration of the shipis approximately 3.5 gal (in the phase range of 240 to 280 degrees), and the vibration is more than twice as large as when not using a balancer. 3)
- vibrationwas reduced in the 110 degree phase range (phase 20 to 130 degree, otherwise expressed as “safety area”) than when not using a balancer. 4)
- the remaining 250 degree phase rangephase 130 ⁇ 360, 0 ⁇ 20 degree, otherwise expressed as “risk area”
- vibrationincreased compared to when the balancer was not used. Therefore, when finding the optimal phase of the balancer, it is desirable to minimize the time spent in the “risk zone”.
- the safety zone where vibration is attenuatedis approximately 120 degrees. , the safety area is described as being 120 degrees.
- the highest pursuit in the present inventionis to find the optimal phase while giving as little vibration damage as possible to the ship (ie, while staying in the danger zone as short as possible).
- the phase of the balancer per unit timeZBE, the phase of the zero point of the balancer relative to the zero point of the engine
- ZBEthe phase of the zero point of the balancer relative to the zero point of the engine
- the magnitude of vibrationis measured.
- the measured valueis not a vibration value in a single phase, but a value representing vibration in a plurality of adjacent phases.
- the representative value of the vibrationis the effective value (rms), the average value (avg), the peak-to-peak value (pp), or the median value of the vibration for the last 1 second. This can be.
- the representative valueincludes all the oscillations of the phase ZBE that have elapsed during the 1 second.
- the vibration signalmay be subjected to fast Fourier transform (hereinafter referred to as “FFT”), and the resulting value for the balancer driving frequency may be used as a value representing the magnitude of vibration of the ship.
- FFTfast Fourier transform
- BPFnarrowband, high-performance bandpass filters
- FFTis one tool to convert a time domain signal into a frequency domain signal. It is natural that a time-domain signal can be converted into a frequency-domain signal using another tool (eg, DFT), and the resulting value can be used as a value representing the magnitude of vibration of a ship.
- the value representing the magnitude of the vibration preferred in the present inventionis not limited to any of the above descriptions. And, it goes without saying that those skilled in the art may use values other than the above-mentioned representative values as “values representing the magnitude of ship vibration”.
- the horizontal axisis time and the unit is seconds. And the vertical axis is the magnitude of the vibration.
- Waveforms 50, 60 and 70show vibrations of 50, 60 and 70 rpm, respectively. At this time, the vibration frequencies are 0.83 Hz, 1 Hz, and 1.16 Hz, respectively.
- ZE0, ZE1, ZE2 and, in general, ZEnare the zero phases of the engine at 0 sec, 1 sec, 2 sec and n sec, respectively.
- the balancer's phase (ZBE) with respect to the engine zero point after 1 secondcan be calculated as ZB50 (ie 420 degrees) - ZE1 (ie 360 degrees) and its value is +60 degrees.
- ZE0, ZE1, ZE2 and, in general, ZEnare the zero phases of the engine at 0 sec, 1 sec, 2 sec and n sec, respectively.
- the phase (ZBE) of the balancerchanges by 6 degrees/sec.
- the phase (ZBE)changes to -6 degree/sec
- the phase (ZBE)changes to +6 degree/sec.
- the magnitude of the vibrationis measured while rotating the phase of the balancer once at a predetermined speed (degree / sec). Then, among the measured values, the vibration is precisely measured again near the phase at which the vibration value is minimum (ie, the “safe area”) to obtain the optimal phase at which the vibration is minimized.
- the optimum phase (Zopt) of the balancer found in this wayis stored in a non-volatile memory and can be used immediately when the balancer starts operating next time.
- Step S100When the rotational speed of the ship's main engine (M/E) is higher than a predetermined value, a balancer operation start procedure is entered to reduce vibration of the ship. And initialize the necessary values. Then, it goes to the next step, S101.
- M/Erotational speed of the ship's main engine
- Step S101In a state where the balancer is not operating, the frequency component of ship vibration is analyzed by FFT.
- the frequency having the maximum value in the FFT resultis the frequency that has the greatest effect on ship vibration.
- the control order(hereinafter referred to as “order”) is defined as a multiple of the rotational speed of the balancer compared to the engine rotational speed. Therefore, the degree n is calculated by formula (1).
- FFT_Freqis the frequency (unit Hz) having the maximum value as a result of the FFT
- E_Hzis a value representing the rotational speed (E_RPM) of the ship's main engine (M/E) in terms of frequency (unit Hz).
- Step S1021) Formula (2) and ( 3) is calculated as Hereinafter, the rotational speed (PS_RPM) of the balancer is referred to as “phase sliding rotational speed (PS_RPM)”.
- T_RPMDegree * E_RPM --- (2)
- PS_RPMT_RPM + C1 --- (3)
- T_RPMis the target rotational speed (T_RPM) of the balancer used to reduce or eliminate ship vibration.
- E_RPMis the rotational speed (E_RPM) of the ship's main engine (M/E).
- PS_RPMis the rotational speed that changes the phase of the balancer (as much as a predetermined value per unit time).
- the units of T_RPM, E_RPM and PS_RPMare rpm.
- the sliding speed (PS_RPM)may be preferably 10 degree/sec (ie, 36 seconds/1 rotation) to 60 degree/sec (ie, 6 seconds/1 rotation). If the constant C1 is +1, the phase (ZBE) of the balancer with respect to the zero point (ZE) of the engine is reduced by 6 degrees/sec per unit time, and if the constant C1 is +1.667, the phase (ZBE) of the balancer is 10 Decreases in degree/sec. Meanwhile, when C1 is a negative number, it is natural that the balancer phase ZBE increases.
- the rotational speed (B_RPM) of the balanceris set to the target rotational speed (T_RPM), and when the target rotational speed (T_RPM) is reached, set to the phase sliding rotational speed (PS_RPM).
- this caseis also expressed as "when the operation of the balancer starts, the rotational speed (B_RPM) of the balancer is set to the phase sliding rotational speed (PS_RPM)".
- Step S103In this step, the balancer is operating and the phase (ZBE) of the balancer is changing at a constant value per unit time (in other words, “during phase sliding”), a value representing the magnitude of ship vibration (Vib_ps) and measure the phase representative value (ZBE_ps) of the balancer.
- the value representing the magnitude of the vibrationis the effective value (rms), the average value (avg), the peak-to-peak value (pp), the maximum value (max), or the median... This can be.
- the FFT result valuemay be used as a value representing the magnitude of vibration.
- measurement valuesmay be obtained at shorter time intervals than the vibration signal collection time. Taking an exaggerated example, if the data collection period is 10 seconds and the data analysis period is 1 second, a measurement value is usually obtained once every 11 seconds. Meanwhile, after 10 seconds of the initial data collection period, measurement values may be obtained at intervals of 1 second. Among the data used in the past, this can be reused within the last 10 seconds.
- the balancer's zero point phase (ZBE) with respect to the engine's zero pointcontinues to change during the data collection and analysis period. Therefore, it is preferable to use the current balancer phase (ZBE) as the representative value (ZBE_ps).
- Step S104In this step, the previously measured "value representing the magnitude of vibration of the ship (Vib_ps)" and “representative value of the phase of the balancer (ZBE_ps)" are stored in memory.
- Step S105It is determined whether the balancer phase (ZBE) continues to decrease or continuously increases to rotate more than 360 degrees (ie, more than one turn). If the balancer phase (ZBE) does not rotate more than one rotation, S103 and S104 are continuously performed until it rotates more than one rotation. If the balancer phase (ZBE) has rotated more than one turn, step S106 is performed.
- Step S106Among the representative values of ship vibration stored in step S104, the minimum value (Vib_ps) and the balancer phase (ZBE_ps) at this time are searched.
- the balancer phase (ZBE_ps)becomes a value (ZBE_near_opt) near the optimal phase (ZBE_opt) that minimizes vessel vibration, and the balancer phase (ZBE_near_opt) is within the “safe area”.
- Step S107This step is a fine adjustment step (hereinafter also referred to as “fine adjustment step”) to find the optimal balancer phase (ZBE_opt) to minimize ship vibration by finely adjusting the phase of the balancer.
- a value representing the magnitude of ship vibrationis measured in the left and right phases of the minimum value phase (ZBE_near_opt) found in the previous step S106 and the minimum value phase (ZBE_near_opt).
- the central phaseis the optimal balancer phase (ZBE_opt) for minimizing ship vibration.
- the optimal phase(ZBE_opt) is found by setting the phase with the smallest vibration as the center phase and performing the procedure for measuring the magnitude of ship vibration again.
- the left and right phasesare separated by about 1 to 10 degrees from the center phase. Specifically, it may be desirable to select left and right phases separated by 10 degrees at the beginning of the fine adjustment and 1 degree apart at the end of the fine adjustment.
- the rotation speed (B_RPM) of the balancermay be set to the sliding rotation speed (PS_RPM) in which the phase change amount (degree/sec) per unit time is a small value (eg, 1 degree/sec).
- PS_RPMsliding rotation speed
- ZBE_newr_optthe phase of the minimum vibration found at this time
- the "fine-tuning step”can be performed in various ways.
- the “fine-tuning step”does not deviate from the spirit of the present invention even if it is performed in any method (including methods not described herein).
- the optimal phase sliding value(degree/sec) can be determined by considering the vibration measurement method (data collection period in detail), the rotational speed of the balancer controller and the maximum vibration of the ship by the balancer.
- the sliding speedis preferably 2 to 10 degrees/sec.
- the time required to find the optimal phase angle (ZBE_opt)will be within a few minutes.
- the time to stay in the "danger zone”will be less than tens of seconds. Specifically, it will stay in the "danger zone” for about 2/3 or less of 36 seconds at 10 deg/sec, 10 seconds at 36 deg/sec, and 6 seconds at 60 deg/sec. This is because the safe zone is about 120 degrees.
- Step S108In this step, engine speed (E_RPM), optimal phase angle (ZBE_opt), order (n), and the like are recorded in the non-volatile memory. This is to drive the balancer immediately without a step of finding an optimum value when the balancer starts operating again in the future.
- Step S109The vibration of the ship is reduced by driving the balancer with the optimal phase angle (ZBE_opt) and order (n) found in the previous step.
- Step S110When the rotational speed of the main engine (M/E) of the ship falls below a predetermined value, the balancer drive ends.
- This embodimentis characterized in that the time for the phase (ZBE) of the balancer to stay in the “danger zone” is smaller than that of the first embodiment.
- Step S200When the rotational speed of the ship's main engine (M/E) is higher than a predetermined value, a balancer operation start procedure is entered to reduce vibration of the ship. And, it initializes the values necessary for starting the procedure. Then, it goes to the next step, S201.
- M/Erotational speed of the ship's main engine
- Step S201In a state where the balancer is not operating, the frequency component of the vibration signal is analyzed by FFT.
- the frequency with the maximum value in the FFT resultis the rotational speed that has the maximum effect on ship vibration.
- the control order(hereinafter referred to as “order”) is defined as a multiple of the rotational speed of the balancer compared to the engine rotational speed. Therefore, the degree n is calculated by formula (1) described above.
- Step S202In a state where the balancer is not operating, a value (Vib_un) representing the magnitude of ship vibration is measured.
- the value representing the magnitude of the ship vibration (Vib_un)is an effective value (rms), an average value (avg), a peak-to-peak value (pp), a maximum value (max), or a median... This can be.
- the FFT result valuemay be used as a value representing the magnitude of vibration.
- one type of valuemay be used as a representative value of vibration amplitude, or a value may be derived using multiple types of values and used as a representative value of vibration amplitude. This is because when multiple values are used, the representative value is expected to be robust against noise.
- Step S2031) Set the balancer's target rotation speed (T_RPM) and the balancer's phase (ZBE) required to reduce ship vibration [as much as a predetermined value (degree/sec) per unit time] in "one direction (eg, reduction)" Calculate the rotational speed (PS_RPM) of the balancer to be changed using the above formulas (2) and (3).
- the rotational speed (PS_RPM) of the balanceris referred to as “phase sliding rotational speed (PS_RPM)”.
- the rotational speed (B_RPM) of the balanceris set to the target rotational speed (T_RPM), and when the target rotational speed (T_RPM) is reached, set to the phase sliding rotational speed (PS_RPM).
- this caseis also expressed as "the rotational speed (B_RPM) of the balancer is set to the rotational speed (PS_RPM) of the phase sliding".
- the “one direction”is set to a direction in which the balancer phase ZBE continuously decreases.
- the balancer rotational speed (B_RPM)is set to [order * E_RPM + 1]
- the balancer phase (ZBE)decreases to 6 degrees/sec.
- Step S204The balancer is currently operating, and the phase (ZBE) of the balancer is changing at a constant value per unit time [in other words, “phase sliding (ps: phase sliding)].
- the magnitude of ship vibration (Vib_ps) and balancer phase (ZBE_ps)are measured during the phase sliding (ps).
- Step S205The ship vibration value (Vib_ps) obtained during “phase sliding (ps)” is compared with the vibration value (Vib_un) when the balancer is not operating.
- steps S221 to S224are sequentially performed. That is, finely adjusting the phase of the balancer to find the optimal phase (ZBE_opt) (S221, S107), storing the values to be used in the future in a non-volatile memory (S222, S108), and setting the phase of the balancer to the optimal phase (ZBE_opt). It follows (S223, S109), and when the engine rotation speed (E_RPM) is lower than a predetermined value, the balancer operation is terminated (S224, S110).
- E_RPMengine rotation speed
- the optimal phase (ZBE_opt)is stored in the non-volatile memory at step S221 (ie, if “fine tuning” has been previously performed), the optimal phase ( ZBE_opt) is preferably followed (S223).
- steps S107 to S110have been described in detail in the first embodiment of the present invention, a detailed description of steps S221 to S224 will be omitted.
- Vib_ps > Vib_unin other words, if the vibration of the ship is greater than before the balancer operation, go to step S211.
- Step S211Currently, the ship vibration value (Vib_ps) obtained during “phase sliding (ps)” is greater than before the balancer operation (vib_un). And, for convenience of description, since the phase of the balancer is set to decrease by a predetermined value per unit time in step S203, the phase (ZBE) of the balancer continues to decrease.
- the ship vibration value (Vib_ps)[obtained during “phase sliding (ps)”] has decreased from the previous ship vibration value (Vib_ps).
- the ship vibration value (Vib_ps)may be measured twice in succession.
- this stepsince this step is in the loop (S204-S205-S211) and (S204-S205-S211-S212), it can be compared with the value measured in the previous step S204.
- the phase (ZBE) of the balancercontinues to decrease even without performing separate control, and then the magnitude of vibration of the ship necessarily increases or decreases (see FIG. 2). If the ship vibration (Vib_ps) has decreased (Case Yes), the current control state is maintained until the ship vibration magnitude (Vib_ps) becomes smaller than the vibration magnitude (Vib_un) (when the balancer is not operating). More specifically, a loop including a measurement step (S204) and comparison steps (S205) and (S211) is performed.
- Step S212This step is performed when it is determined in step S211 that the magnitude of ship vibration (Vib_ps) has increased (Case No). If left as it is, the magnitude of the vibration will continue to increase, and after reaching the maximum value, it will decrease and come to the current magnitude of the vibration (Vib_ps). This step is a step for removing the time required at this time and the vibration damage to be applied to the ship.
- the change direction of the balancer phase (ZBE)is not set in the “other direction” (eg, “increase”), but is set in the opposite direction to the current change direction, the balancer phase (ZBE) is set to a specific Be aware that there may be cases where you are stuck in a section and cannot get out of that section.
- the balancer phase (ZBE)is set to a specific Be aware that there may be cases where you are stuck in a section and cannot get out of that section.
- step (201) or (101)is removed in the embodiments of the present invention, the control order cannot be found automatically and must be manually input.
- the phase (ZBE) of the balancerin order to quickly enter the "safe area”, it is preferable to increase (or decrease) the phase (ZBE) of the balancer at 10 to 60 degree/sec.
- the "vessel equipped with a vibration damper" according to the present inventionhas very high industrial applicability.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Acoustics & Sound (AREA)
- Aviation & Aerospace Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Ocean & Marine Engineering (AREA)
- Vibration Prevention Devices (AREA)
Abstract
Description
Translated fromKorean본 발명은 선박의, 엔진 및 프로펠러 등에 의해 발생되는, 선체 구조물의 진동을 감쇄하는 진동감쇄기를 구비한 선박에 관한 것이다.The present invention relates to a ship equipped with a vibration attenuator for damping vibration of a ship's hull structure generated by an engine, a propeller, and the like.
최근 컨테이너 운반선과 같은 대형상선은 자동화 및 고속화 등의 영향으로, 선박 구조의 강성은 상대적으로 낮아지고, 기진력은 증가할 가능성이 높아졌다.In recent years, large merchant ships such as container carriers have been influenced by automation and speeding, and the rigidity of the ship structure is relatively low, and the possibility of increasing the vibration force is high.
선박 건조 후 허용치를 초과하는 상부구조 진동을 효율적으로 감쇄할 수 있는 기술들이 다수 있다. 예를 들면, 출원번호 10-2012-0135635, 출원번호 10-2019-0089092, 인용논문 1 등에서는 엔진에 의하여 발생하는 기전력과 반대 위상의 기진력을 편심 회전체로 발생시켜서 선박의 진동을 감쇄 시킨다.There are a number of technologies that can efficiently attenuate superstructure vibration that exceeds the permissible value after ship construction. For example, in Application No. 10-2012-0135635, Application No. 10-2019-0089092, and Cited Paper 1, the vibration of the ship is damped by generating the electromotive force generated by the engine and the excitation force of the opposite phase to the eccentric rotating body .
종래에는 선박 건조 후 시운전 단계에서, 1)엔진의 영점에 대한 상기 편심 회전체의 영점 위상을 사람이 수동으로 설정하고, 2) 선박진동의 크기를 측정하고, 3) 상기 절차를 다수회 반복하여서, 진동의 크기가 최소가 되는 편심질량 회전체의 위상각을 찾았다. 4)그리고 그 결과를 진동 감쇄기에 저장하여서 선박의 일상 운전에서 사용한다. 통상 위의 절차는 반나절 정도 소요된다.Conventionally, in the trial run phase after ship construction, 1) a person manually sets the zero phase of the eccentric rotating body relative to the zero point of the engine, 2) measures the magnitude of ship vibration, and 3) repeats the above procedure a number of times. , the phase angle of the eccentric mass rotating body at which the amplitude of vibration is minimized was found. 4) Then, the result is stored in the vibration damper and used in the daily operation of the ship. Usually, the above procedure takes about half a day.
선박 건조 후 선박의 상태를 점검 및 조정하는 “시 운전”은, 보통 수일(예, 3~4일) 이 소요된다. 그러므로, 상기 절차 1) ~ 3) 을 수행하는 기술자는 작업이 끝난 후, 선박의 시운전이 종료될 때 까지, 며칠간 선내에서 대기하여야 하는 문제점이 있다.“Trial operation”, which checks and adjusts the condition of the ship after the ship is built, usually takes several days (eg, 3 to 4 days). Therefore, there is a problem in that the technician performing the above procedures 1) to 3) has to wait in the ship for several days after the work is finished until the test run of the ship is completed.
또한, 사후 유지보수 작업으로 영점을 검출하는 엔진등의 영점 위치가 바뀌면, 다시 최적 위상을 수동으로 찾고, 선박의 일상운전에 사용할 수 있도록 설정하여야 하는 문제점이 있다.In addition, when the position of the zero point of the engine detecting the zero point is changed due to post-maintenance work, there is a problem in that the optimum phase must be manually found and set so that it can be used in the daily operation of the ship.
< 선행 특허문헌 ><Prior Patent Documents>
(특허문헌 1) 출원번호 10-2019-0089092 (이하, “092 특허”)(Patent Document 1) Application No. 10-2019-0089092 (hereinafter, “092 Patent”)
(특허문헌 2) 출원번호 10-2012-0135635 (이하, “635 특허”)(Patent Document 2) Application No. 10-2012-0135635 (hereinafter, “Patent 635”)
(특허문헌 3) 출원번호 10-2012-0018031 (이하, “031 특허”)(Patent Document 3) Application No. 10-2012-0018031 (hereinafter “031 Patent”)
(특허문헌 4) 출원번호 10-2001-0040945 (이하, “945 특허”)(Patent Document 4) Application No. 10-2001-0040945 (hereinafter “945 Patent”)
(특허문헌 5) 출원번호 10-1995-0705935 (이하, “935 특허“)(Patent Document 5) Application No. 10-1995-0705935 (hereinafter, “935 Patent”)
< 선행 비특허문헌 >< Prior non-patent literature >
(비특허문헌 1)Dae-Seung Cho, Tae-Muk Choi et al., August 2004, “A Study on the Practical Use of an Active Control System to Reduce Ship Superstructure Vibration”, Journal of the Society of Naval Architects of Korea, Vol. 41, No. 4, pp. 77-84. (이하, “인용논문 1”)(Non-Patent Document 1) Dae-Seung Cho, Tae-Muk Choi et al., August 2004, “A Study on the Practical Use of an Active Control System to Reduce Ship Superstructure Vibration”, Journal of the Society of Naval Architects of Korea , Vol. 41, no. 4, p. 77-84. (Hereinafter, “Citation 1”)
본 발명은 종래기술의 문제점을 해결하기 위한 것으로, 자동으로 최적위상 및 제어차수를 찾는 진동감쇄기를 구비한 선박을 제공하는데 그 목적이 있다The present invention is to solve the problems of the prior art, and an object of the present invention is to provide a ship equipped with a vibration damper that automatically finds the optimum phase and control order.
본 발명에 따른 진동 감쇄기를 구비한 선박에 있어서 상기 진동 감쇄기 ( 이하 "발란서")는, 편심질량체를 회전시키는 모터; 엔진의 회전속도(E_RPM) 및 상기 발란서의 회전속도(B_RPM) 를 측정하는 수단; 상기 엔진의 제로 위상(ZE) 과 상기 발란서의 제로 위상(ZB)을 검출하는 수단; 및 상기 엔진의 위상(ZE)에 대한 상기 발란서의 위상(ZBE)이 소정의 값만큼 단위시간당 변하도록 (degree/sec) 하는 제어수단;을 포함하고, 선박 주기관(M/E)의 회전속도가 기 설정된 소정의 값보다 높아지면, 선박의 진동을 감소시키기 위하여 상기 모터 가동을 개시하고, 이때 상기 발란서의 회전속도 (B_RPM)은 발란서의 위상(ZBE)을 [ 단위시간당 소정의 값(degree/sec) 만큼 ] “일 방향(예, 감소)”으로 변하게 하는 "슬라이딩 회전속도(PS_RPM)" 인 것; 을 특징으로 한다.In a ship equipped with a vibration damper according to the present invention, the vibration damper (hereinafter referred to as “balancer”) includes a motor for rotating an eccentric mass; Means for measuring the rotational speed (E_RPM) of the engine and the rotational speed (B_RPM) of the balancer; means for detecting the zero phase (ZE) of the engine and the zero phase (ZB) of the balancer; And a control means for changing the phase (ZBE) of the balancer with respect to the phase (ZE) of the engine per unit time by a predetermined value (degree / sec); including, the rotation of the ship main engine (M / E) When the speed is higher than a predetermined value, the motor starts operating to reduce the vibration of the ship, and at this time, the rotational speed (B_RPM) of the balancer sets the phase (ZBE) of the balancer [predetermined value per unit time (degree/sec)] to be "sliding rotation speed (PS_RPM)" that changes in "one direction (eg, decrease)"; characterized by
이때, 상기 발란서의 위상(ZBE)이 일 방향(예 “감소”)의 소정의 값으로 단위시간당 변하는 중에, 상기 선박의 진동크기(Vib)가 상기 발란서를 가동하기 이전 진동크기 (vib_un) 보다 크면서, 상기 진동크기(Vib)가 증가하면, 상기 발란서의 위상(ZBE)이 타 방향(예 “증가”)의 소정의 값으로 단위시간당 변(degree/sec)하게 하는 것; 이 바람직하다.At this time, while the phase (ZBE) of the balancer changes per unit time at a predetermined value in one direction (eg “decrease”), the vibration magnitude (Vib) of the ship is greater than the vibration magnitude (vib_un) before operating the balancer. While large, when the vibration magnitude (Vib) increases, the phase (ZBE) of the balancer changes per unit time (degree / sec) with a predetermined value in the other direction (eg “increase”); this is preferable
또한, 상기 발란서의 위상(ZBE)이 일 방향(예 “감소”)의 소정의 값으로 단위시간당 변하는 중에, 상기 선박의 진동크기(Vib)가 상기 발란서를 가동하기 이전 진동크기 (Vib_un)보다 작아지면, 이때 상기 발란서 위상(ZBE) 근처에서 [상기 발란서의 위상을 미세하게 조정하여 최적 위상(ZBE_opt)를 찾는] "미세조정 단계"를 수행하는 것; 이 바람직하다.In addition, while the phase (ZBE) of the balancer changes per unit time at a predetermined value in one direction (eg “decrease”), the vibration magnitude (Vib) of the ship is greater than the vibration magnitude (Vib_un) before operating the balancer. If it becomes small, at this time, performing a "fine-tuning step" [finely adjusting the phase of the balancer to find the optimal phase (ZBE_opt)] near the balancer phase (ZBE); this is preferable
또한, 상기 발란서가 운전을 개시하기 이전에 시간영역의 진동신호를 주파수 영역신호로 변환하고; [ 상기 주파수 영역 신호에서 최대값을 가지는 주파수(FFT_Freq)를 상기 선박의 주기관(M/E)의 회전속도(E_Hz)로 나누어서 ] 선박진동의 제어차수(n)을 구하는 것; 이 바람직하다.In addition, before the balancer starts operating, the vibration signal in the time domain is converted into a signal in the frequency domain; [Dividing the frequency (FFT_Freq) having the maximum value in the frequency domain signal by the rotational speed (E_Hz) of the main engine (M/E) of the ship] Obtaining the control order (n) of ship vibration; this is preferable
본 발명에 따른 진동감쇄기를 구비한 선박은 다음과 같은 효과가 있다A ship equipped with a vibration damper according to the present invention has the following effects
1) 진동감쇄기의 최적위상 및 차수를 자동으로 찾고 설정하므로, 선박 건조 후 선박의 상태를 점검 및 조정하는 “시 운전”에서 별도의 조정인원이 필요 없다.1) Since the optimal phase and order of the vibration damper are automatically found and set, no additional adjuster is required in the “trial operation” that checks and adjusts the condition of the ship after the ship is built.
2) 유지보수 작업으로 엔진의 영점의 위치가 변경되어도, 자동으로 최적 위상을 검출하여 설정할 수 있다.2) Even if the position of the zero point of the engine is changed due to maintenance work, the optimum phase can be automatically detected and set.
따라서, 종래보다 유지보수비가 낮은 진동감쇄기를 구비한 선박이 제공되는 효과가 있다.Therefore, there is an effect of providing a ship equipped with a vibration damper with a lower maintenance cost than the prior art.
도1은 진동이 감소 및 증가할 수 있음을 설명하는 도면이다.1 is a diagram explaining that vibration can be reduced and increased.
도2는 발란서의 위상에 따른 선박의 진동크기를 나타낸 예이다.Figure 2 is an example showing the magnitude of vibration of the ship according to the phase of the balancer.
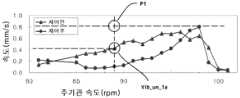
도3은 주기관(M/E) 회전속도별로 발란서의 효과를 나타낸 예이다.3 is an example showing the effect of the balancer for each rotational speed of the main engine (M/E).
도4는 위상 슬라이딩을 설명하기 위한 도면이다.4 is a diagram for explaining phase sliding.
도5는 본 발명의 일 실시예를 설명하기 위한 것이다.5 is for explaining one embodiment of the present invention.
도6은 본 발명의 또 다른 일 실시예를 설명하기 위한 것이다.6 is for explaining another embodiment of the present invention.
이하, 첨부된 도면을 참조하여 본발명의 바람직한 실시 예들을 상세히 설명한다. 이때 첨부된 도면에서 동일한 구성요소는 가능한 동일한 부호로 나타내고 있음에 유의하여야 한다. 본 명세서에서, 단수형은 문구에서 특별히 언급하지 않는 한 복수형도 포함한다. 명세서에서 사용되는 "포함한다(comprises)" 및/또는 "포함하는 (comprising)"은 언급된 구성요소, 단계 및/또는 동작은 하나 이상의 다른 구성요소, 단계 및/또는 동작의 존재 또는 추가를 배제하지 않는다.Hereinafter, preferred embodiments of the present invention will be described in detail with reference to the accompanying drawings. At this time, it should be noted that in the accompanying drawings, the same components are indicated by the same reference numerals as much as possible. In this specification, singular forms also include plural forms unless specifically stated otherwise in a phrase. As used herein, "comprises" and/or "comprising" means that a stated component, step and/or operation excludes the presence or addition of one or more other components, steps and/or operations. I never do that.
또한 이하에서 설명되는 본 명세서 및 청구범위에 사용된 용어나 단어는 통상적이거나 사전적인 의미로 한정해서 해석해서는 아니 되며, 본발명의 기술적 사상에 부합하는 의미와 개념으로 해석되어야만 한다. 그리고 본발명의 요지를 불필요하게 흐릴 수 있다고 판단되는 공지구성 및 기능에대한 상세 한설명은 생략한다.In addition, the terms or words used in the present specification and claims described below should not be construed as being limited to ordinary or dictionary meanings, but should be interpreted as meanings and concepts consistent with the technical spirit of the present invention. In addition, detailed descriptions of well-known configurations and functions that may unnecessarily obscure the gist of the present invention will be omitted.
본 발명은 선박의 엔진 및 프로펠러 등에 의해 발생하는, 선체 구조물의 진동을 감쇄하는 진동감쇄기를 구비한 선박에 관한 것이다. 더욱 상세하게는 선체의 진동과 반대되는 위상의 진동을 만들어서, 상기 선체에 공급하여, 상기 진동을 감쇄시키는 또는 제거하는 진동감쇄기 구비한 선박에 관한 것이다.The present invention relates to a ship equipped with a vibration damper for damping vibration of a hull structure generated by a ship's engine, propeller, etc. More specifically, it relates to a ship equipped with a vibration attenuator for generating vibration of a phase opposite to that of the hull, supplying the vibration to the hull, and attenuating or removing the vibration.
본 발명은 고정편심 혹은 가변편심의 진동감쇄기(이하 “발란서” 라고도 칭함) 사용을 전제로 설명한다. 발란서는 “031 특허”, “945 특허” 등의 선행기술에서 많이 소개되어 있으므로, 상세한 설명은 생략한다. 참고로, 발란서에서 발생하는 진동은 단일 주파수이다.The present invention will be described on the premise of using a vibration damper (hereinafter also referred to as a “balancer”) of fixed eccentricity or variable eccentricity. Since the balancer has been introduced in many prior arts such as the “031 patent” and the “945 patent”, detailed descriptions will be omitted. For reference, the vibration generated from the balancer is a single frequency.
< 진동의 감소 및 증가 >< Reduction and increase of vibration >
이하, 첨부된 도1 내지 도3을 참고하여서 진동감쇄기에 의하여 발생할 수 있는 진동의 감쇄 및 증가의 일 예를 살펴본다.Hereinafter, an example of attenuation and increase of vibration that can be generated by a vibration damper will be described with reference to FIGS. 1 to 3 attached.
먼저 도1에서, 진동 (VE1) 및 (VE2) 는 발란서를 사용하지 않을 때 선박의 진동이다. 그리고, 진동 (VB1) 및 (VB2) 는 발란서에서 발생하는 진동이다. 상기 발란서를 사용하지 않을 때 선박진동 (VE1) (VE2) 와 상기 발란서에서 발생하는 진동 (VB1) (VB2) 의 합이 선박진동 (V1) (V2) 가 된다. 발란서에 의하여 선박진동이 (V1) 과 같이 감소 되기를 희망하지만, 오히려 선박진동이 (V2) 과 같이 증가될 수도 있다.First, in FIG. 1, vibrations (VE1) and (VE2) are vibrations of the ship when the balancer is not used. And, vibrations (VB1) and (VB2) are vibrations generated in the balancer. When the balancer is not used, the sum of ship vibrations (VE1) (VE2) and vibrations (VB1) (VB2) generated by the balancer becomes ship vibration (V1) (V2). It is hoped that the ship vibration will be reduced like (V1) by the balancer, but the ship vibration may be increased like (V2).
도2 및 도3은 “인용논문 1”에서 발췌한 것이다. 선박은 5500 TEU 컨테이너 운반선이고, 주기관(M/E)의 회전속도가 89 rpm 일 때, 발란서의 위상을 10도 간격으로 수동으로 조정하고, 선박의 진동(Vib_m1) 을 가속도(gal)로 측정하고, 이론값 (Vib_t1) 과 같이 도시하였다. 그리고 발란서를 가동하지 않을 때의 진동 값 (Vib_un_1) 도 같이 도시하였다.2 and 3 are excerpts from "Citation Paper 1". The ship is a 5500 TEU container carrier, and when the rotational speed of the main engine (M/E) is 89 rpm, the phase of the balancer is manually adjusted at 10-degree intervals, and the ship's vibration (Vib_m1) is converted into acceleration (gal). It was measured and plotted as the theoretical value (Vib_t1). And the vibration value (Vib_un_1) when the balancer is not operating is also shown.
도3 은, 주기관(M/E)의 회전속도를 81 ~ 101 rpm 으로 변경하면서, 발란서를 사용할 때와 하지 않을 때의 진동을 측정한 것이다. 여기서, 주기관(M/E)의 회전속도가 89 rpm 일 때 진동속도는 대략 0.4 mm/s (Vib_un_1a) 이고, 상기 선박의 최대 진동속도는 대략 2배 인 0.8 mm/s (P1) 임을 알 수 있다.Figure 3, while changing the rotational speed of the main engine (M / E) from 81 to 101 rpm, vibration is measured when the balancer is used and when not. Here, when the rotational speed of the main engine (M/E) is 89 rpm, the vibration speed is approximately 0.4 mm/s (Vib_un_1a), and the maximum vibration speed of the ship is approximately 2 times 0.8 mm/s (P1). can
보다 상세하게, 도2 를 살펴보면, 1)발란서를 사용하지 않을 때 선박의 진동 가속도는 대략 1.6 gal 이다. 2)발란서를 사용할 때 선박의 최대 진동 가속도는 대략 (위상 240~280 degree 구간에서 ) 3.5 gal 로, 발란서를 사용하지 않을 때 보다 2배 이상 진동이 크다. 3)발란서를 사용할 때, 110도 위상구간(위상 20~130 degree, 다르게 표현하면 “안전영역”) 에서 발란서를 사용하지 않을 때보다 진동이 감소하였다. 4)반면에, 나머지 250도 위상구간(위상 130~360, 0~20 degree,다르게 표현하면 “위험영역”) 에서는 발란서를 사용하지 않을 때보다 진동이 증가하였다. 그러므로, 발란서의 최적 위상을 찾을 때에는, “위험영역”에 머무는 시간이 최소가 되도록 하는 것이 바람직하다.( 진동이 감쇄되는 안전영역은 대략 120도 인 것으로 실험결과 판단됨, 이하에서는 설명의 편의상, 안전영역은 120도 인 것으로 하여서 설명한다.)In more detail, looking at Figure 2, 1) the vibration acceleration of the ship when not using a balancer is approximately 1.6 gal. 2) When using a balancer, the maximum vibration acceleration of the ship is approximately 3.5 gal (in the phase range of 240 to 280 degrees), and the vibration is more than twice as large as when not using a balancer. 3) When using a balancer, vibration was reduced in the 110 degree phase range (
< 최적위상 찾기 단계에서 진동 측정방법 >< Vibration measurement method in the step of finding the optimal phase >
본 발명에서 제일 높게 추구하는 것은 선박에 진동 대미지를 최대한 적게 주면서 ( 즉 위험영역에 머무는 시간을 최대한 짧게 하면서 ) 최적 위상을 찾는 것이다.The highest pursuit in the present invention is to find the optimal phase while giving as little vibration damage as possible to the ship (ie, while staying in the danger zone as short as possible).
이를 위해 본발명에서는 최적 위상을 찾을 때, “안전영역”에 빠르게 진입하기 위하여, 단위 시간당 발란서의 위상(ZBE, 엔진 영점에 대한 발란서 영점의 위상 )이 소정의 일정한 값으로 증가 하도록 하고, 이 상태에서 선박의 진동값을 측정한다. 그러면 종래의 방법, 즉 어떤 위상에서 진동을 측정하고 또 다른 위상에서 선박진동을 측정하는 경우보다 “위험영역”에 머무는 시간이 작을 것이 기대된다.To this end, in the present invention, when finding the optimal phase, in order to quickly enter the “safe area”, the phase of the balancer per unit time (ZBE, the phase of the zero point of the balancer relative to the zero point of the engine) is increased to a predetermined constant value, In this state, the vibration value of the ship is measured. Then, it is expected that the time to stay in the “danger zone” is shorter than in the case of the conventional method, that is, measuring vibration in one phase and measuring ship vibration in another phase.
구체적인 수치로 예를 들면, 10 degree /sec로 발란서 위상(ZBE)이 변하면, 36초 만에 1 회전을 할 수 있고, "위험영역"에 머무는 시간은 24초 이다. 그리고 36 degree / sec 로 위상 (ZBE) 가 변하면 10초 만에 1회전을 할 수 있고, "위험영역"에 머무는 시간은 6.67초 이다. 한편, 위상 (ZBE) 가 소정의 일정한 값으로 단위시간당 감소하도록 하여도 같은 결과임은 당연하다.For example, with specific figures, if the balancer phase (ZBE) changes at 10 degree / sec, one rotation can be made in 36 seconds, and the time to stay in the "danger zone" is 24 seconds. And if the phase (ZBE) changes at 36 degrees / sec, it can make one rotation in 10 seconds, and the time to stay in the "danger zone" is 6.67 seconds. On the other hand, it is natural that the same result is obtained even if the phase ZBE is decreased per unit time by a predetermined constant value.
본 발명에서는 발란서 위상이 단위시간에 일정한 값으로 증가(또는 감소 둘 중 하나)할 때, 진동의 크기를 측정한다. 이때 측정된 값은 단일 위상에서의 진동값이 아니고, 인접한 복수개 위상에서의 진동을 대표하는 값이 된다. 일 예로 상기 진동을 대표값은, 최근 1초간 진동의 실효값(rms), 평균값(avg), 피크-피크 값(pp), 또는 중위수… 이 될 수 있다. 그러면, 상기 대표값에는 상기 1초 동안 경과한 위상 (ZBE) 의 진동이 모두 포함되어 있다.In the present invention, when the balancer phase increases (or decreases) at a constant value per unit time, the magnitude of vibration is measured. At this time, the measured value is not a vibration value in a single phase, but a value representing vibration in a plurality of adjacent phases. For example, the representative value of the vibration is the effective value (rms), the average value (avg), the peak-to-peak value (pp), or the median value of the vibration for the last 1 second. This can be. Then, the representative value includes all the oscillations of the phase ZBE that have elapsed during the 1 second.
한편, 진동신호를 고속 푸리에 변환(이하, “FFT”)하고, 발란서 구동 주파수에 대한 결과값을 선박의 진동크기를 대표하는 값으로 사용할 수도 있다. 이것은 다수 ( 즉, FFT 결과 빈 개수 ) 의 협대역의 고성능 대역통과필터(이하, “BPF”)를 사용하여서, 선박의 진동 크기를 측정한 것과 같다.On the other hand, the vibration signal may be subjected to fast Fourier transform (hereinafter referred to as “FFT”), and the resulting value for the balancer driving frequency may be used as a value representing the magnitude of vibration of the ship. This is the same as measuring the magnitude of ship vibration using a large number (ie, the number of bins in the FFT result) of narrowband, high-performance bandpass filters (hereinafter referred to as “BPF”).
FFT 는 시간영역 신호를 주파수 영역 신호로 변환하는 하나의 도구이다. 다른 도구(예, DFT)를 사용하여서, 시간영역 신호를 주파수영역 신호로 변환하고, 그 결과값을 선박의 진동크기를 대표하는 값으로 사용할 수 있음은 당연하다.FFT is one tool to convert a time domain signal into a frequency domain signal. It is natural that a time-domain signal can be converted into a frequency-domain signal using another tool (eg, DFT), and the resulting value can be used as a value representing the magnitude of vibration of a ship.
본 발명에 바람직한 진동의 크기를 대표하는 값은, 상기 설명 중 어느 하나로 제한되지 아니한다. 그리고, 당업자는 상기 언급된 대표값 이외의 값들을 “선박진동의 크기를 대표하는 값”으로 사용할 수 도 있음은 당연하다. The value representing the magnitude of the vibration preferred in the present invention is not limited to any of the above descriptions. And, it goes without saying that those skilled in the art may use values other than the above-mentioned representative values as “values representing the magnitude of ship vibration”.
< 발란서의 위상 슬라이딩 >< Balancer phase sliding >
이하, 도4을 참고하여서 발란서의 위상을 연속적으로 변경하는 일 예를 살펴본다.Hereinafter, an example of continuously changing the phase of the balancer will be described with reference to FIG. 4 .
도4에서 수평축은 시간이고 단위는 초 이다. 그리고 수직축은 진동의 크기이다. 파형 (50), (60) 및 (70) 은 각각 50, 60 및 70 rpm 의 진동을 도시한 것이다. 이때, 진동 주파수는 각각, 0.83 Hz, 1 Hz 및 1.16 Hz 이다.In FIG. 4, the horizontal axis is time and the unit is seconds. And the vertical axis is the magnitude of the vibration.
엔진과 발란서가 0 초 에서 위상이 모두 0 degree 로 같다. 엔진이 60 rpm 으로 회전하고, 발란서가 70 rpm 으로 회전한다면, 1초 후에 엔진 영점에 대한 발란서의 위상(ZBE)은 ZB70(즉, 300 도) - ZE1(즉, 360도) 로 계산할 수 있으며, 그 값은 -60 도 이다. 2초 후에 발란서의 위상(ZBE)는 ZB70 - ZE2 로 계산할 수 있으며, 그 값은 -120 도 다. 즉, 발란서 영접(ZB70)과 엔진 영접(Zen)의 위상차 ( ZB70En = ZB70 - ZEn ) 는 60 degree/sec 의 속도로 감소한다. 여기서 ZE0, ZE1, ZE2 그리고 일반화 하여서 ZEn 는 각각, 0초, 1초, 2초 및 n초 에서 엔진의 제로위상이다.The phases of the engine and balancer are both equal to 0 degree at 0 seconds. If the engine rotates at 60 rpm and the balancer rotates at 70 rpm, the balancer's phase (ZBE) with respect to engine zero after 1 second can be calculated as ZB70 (i.e. 300 degrees) - ZE1 (i.e. 360 degrees) , its value is -60 degrees. After 2 seconds, the balancer's phase (ZBE) can be calculated as ZB70 - ZE2, which is -120 degrees. That is, the phase difference ( ZB70En = ZB70 - ZEn ) between the balancer reception (ZB70) and the engine reception (Zen) decreases at a rate of 60 degree/sec. Here, ZE0, ZE1, ZE2 and, in general, ZEn are the zero phases of the engine at 0 sec, 1 sec, 2 sec and n sec, respectively.
한편 엔진이 60 rpm 으로 회전하고, 발란서가 50 rpm 으로 회전한다면, 1초 후에 엔진 영점에 대한 발란서의 위상(ZBE)은 ZB50(즉, 420도) - ZE1(즉, 360도) 로 계산할 수 있으며, 그 값은 +60 도 이다. 2초 후에 발란서의 위상(ZBE)는 ZB50 - ZE2 로 계산할 수 있으며, 그 값은 +120 도 이다. 즉, 발란서 영접(ZB50)과 엔진 영접(Zen)의 위상차 ( ZB50En = ZB50 - ZEn ) 는 60 degree/sec 의 속도로 증가한다. 여기서 ZE0, ZE1, ZE2 그리고 일반화 하여서 ZEn 는 각각, 0초, 1초, 2초 및 n초 에서 엔진의 제로위상이다.On the other hand, if the engine rotates at 60 rpm and the balancer rotates at 50 rpm, the balancer's phase (ZBE) with respect to the engine zero point after 1 second can be calculated as ZB50 (ie 420 degrees) - ZE1 (ie 360 degrees) and its value is +60 degrees. After 2 seconds, the balancer's phase (ZBE) can be calculated as ZB50 - ZE2, which is +120 degrees. That is, the phase difference ( ZB50En = ZB50 - ZEn ) between the balancer reception (ZB50) and the engine reception (Zen) increases at a rate of 60 degree/sec. Here, ZE0, ZE1, ZE2 and, in general, ZEn are the zero phases of the engine at 0 sec, 1 sec, 2 sec and n sec, respectively.
요약하면, 엔진과 발란서의 회전속도를 1rpm 차이 나도록 하면, 발란서의 위상 (ZBE)는 6 degree/sec 로 변한다. 이때, 발란서의 회전속도가 엔진 회전속도 보다 높으면, 위상 (ZBE)는 -6 degree/sec 로 변하고, 발란서의 회전속도가 엔진 회전속도 보다 낮으면, 위상 (ZBE)는 +6 degree/sec 로 변한다.In summary, if the rotation speed of the engine and the balancer is different by 1 rpm, the phase (ZBE) of the balancer changes by 6 degrees/sec. At this time, if the balancer rotation speed is higher than the engine rotation speed, the phase (ZBE) changes to -6 degree/sec, and if the balancer rotation speed is lower than the engine rotation speed, the phase (ZBE) changes to +6 degree/sec. turns into
이하 도5를 참고하여서, 본 발명의 바람직한 일 실시예를 설명한다.Referring to Figure 5, a preferred embodiment of the present invention will be described.
도 5에서는, 발란서의 위상을 소정의 속도(degree/sec) 로 1회전 시키면서 진동의 크기를 측정하다. 그리고, 그 측정값들 중에서 진동값이 최소가 되는 위상 근처에서(즉, "안전영역") 다시 진동을 정밀하게 측정하여서 진동이 최소가 되는 최적 위상을 구하는 절차이다. 이렇게 찾은 발란서의 최적 위상(Zopt)는 비휘발성 메모리에 저장하여서, 다음에 발란서가 동작을 개시할 때 바로 사용할 수 있다.In Figure 5, the magnitude of the vibration is measured while rotating the phase of the balancer once at a predetermined speed (degree / sec). Then, among the measured values, the vibration is precisely measured again near the phase at which the vibration value is minimum (ie, the “safe area”) to obtain the optimal phase at which the vibration is minimized. The optimum phase (Zopt) of the balancer found in this way is stored in a non-volatile memory and can be used immediately when the balancer starts operating next time.
<실시예 1><Example 1>
스텝 S100 : 선박 주기관(M/E)의 회전속도가 기 설정된 소정의 값보다 높아지면, 선박의 진동을 감소시키기 위하여 발란서 작동개시 절차에 진입한다. 그리고 필요한 값들을 초기화한다. 그리고 다음 스텝인 S101 로 간다.Step S100: When the rotational speed of the ship's main engine (M/E) is higher than a predetermined value, a balancer operation start procedure is entered to reduce vibration of the ship. And initialize the necessary values. Then, it goes to the next step, S101.
이하, 다음에 수행할 스텝의 숫자가 현재 수행중인 스텝의 숫자보다 1 큰 경우에는 “다음 스텝으로 간다”는 설명은 편의상 생략한다.Hereinafter, if the number of steps to be performed next is greater than the number of steps currently being performed by one, the description of “going to the next step” is omitted for convenience.
스텝 S101 : 발란서가 동작하지 않는 상태에서, FFT로 선박진동의 주파수 성분을 분석한다. 상기 FFT 결과에서 최대값을 가지는 주파수가 선박진동에 최대로 영향을 주는 주파수이다. 제어 차수(이하, “차수”)는 엔진 회전속도 대비 발란서의 회전속도의 배수로 정의된다. 따라서 차수 n 는 공식 (1) 로 계산된다.Step S101: In a state where the balancer is not operating, the frequency component of ship vibration is analyzed by FFT. The frequency having the maximum value in the FFT result is the frequency that has the greatest effect on ship vibration. The control order (hereinafter referred to as “order”) is defined as a multiple of the rotational speed of the balancer compared to the engine rotational speed. Therefore, the degree n is calculated by formula (1).
차수 = FFT_Freq / E_Hz --- (1)Order = FFT_Freq / E_Hz --- (1)
여기서 FFT_Freq 는 FFT 결과 최대값을 가지는 주파수(단위 Hz) 이고, E_Hz 는 선박 주기관(M/E)의 회전속도(E_RPM)를 주파수(단위 Hz)로 나타낸 값이다.Here, FFT_Freq is the frequency (unit Hz) having the maximum value as a result of the FFT, and E_Hz is a value representing the rotational speed (E_RPM) of the ship's main engine (M/E) in terms of frequency (unit Hz).
스텝 S102: 1) 선박진동 감소에 필요한 발란서의 목표 회전속도(T_RPM) 및 발란서의 위상을 (단위시간당 소정의 값만큼) 변하게 하는 발란서의 회전속도 (PS_RPM) 을 공식 (2) 및 (3) 으로 계산한다. 이하, 상기 발란서의 회전속도 (PS_RPM) 은 “위상 슬라이딩 회전속도(PS_RPM)”라 칭한다.Step S102: 1) Formula (2) and ( 3) is calculated as Hereinafter, the rotational speed (PS_RPM) of the balancer is referred to as “phase sliding rotational speed (PS_RPM)”.
T_RPM = 차수 * E_RPM --- (2)T_RPM = Degree * E_RPM --- (2)
PS_RPM = T_RPM + C1 --- (3)PS_RPM = T_RPM + C1 --- (3)
여기서, C1 은 상수이고, T_RPM 은 선박진동을 감소 또는 제거 하는데 사용되는 발란서의 목표 회전속도(T_RPM) 이다. E_RPM 은 선박 주기관(M/E)의 회전속도(E_RPM) 이다. PS_RPM 은 발란서의 위상을 (단위시간당 소정의 값만큼) 변하게 하는 회전속도이다. T_RPM, E_RPM 및 PS_RPM의 단위는 rpm 이다.Here, C1 is a constant, and T_RPM is the target rotational speed (T_RPM) of the balancer used to reduce or eliminate ship vibration. E_RPM is the rotational speed (E_RPM) of the ship's main engine (M/E). PS_RPM is the rotational speed that changes the phase of the balancer (as much as a predetermined value per unit time). The units of T_RPM, E_RPM and PS_RPM are rpm.
그리고, 2) 발란서의 가동을 개시한다. 보다 상세하게는, 발란서의 편심질량체를 회전시키는 모터를 가동시킨다.And, 2) start the operation of the balancer. More specifically, a motor for rotating the eccentric mass of the balancer is operated.
"발란서의 가동이 개시되면, 발란서의 회전속도(B_RPM)는 위상 슬라이딩 회전속도 (PS_RPM) 으로 설정"하는 것이 바람직하다. 여기서, 슬라이딩 속도(PS_RPM)는 10 degree/sec (즉, 36초/1회전) ~ 60 degree/sec (즉, 6초/1회전) 인 것이 바람직 할 수 있다. 상기 상수 C1 이 +1 이면 엔진의 영점(ZE)에 대한 발란서의 위상(ZBE)는 단위시간당 6 degree/sec 로 감소하고, 상기 상수 C1 이 +1.667 이면 상기 상기 발란서 위상(ZBE)는 10 degree/sec 로 감소한다. 한편 상기 C1 이 음수이면 상기 발란서 위상(ZBE)이 증가함은 당연하다. It is preferable to “set the rotational speed (B_RPM) of the balancer to the phase sliding rotational speed (PS_RPM) when the operation of the balancer starts”. Here, the sliding speed (PS_RPM) may be preferably 10 degree/sec (ie, 36 seconds/1 rotation) to 60 degree/sec (ie, 6 seconds/1 rotation). If the constant C1 is +1, the phase (ZBE) of the balancer with respect to the zero point (ZE) of the engine is reduced by 6 degrees/sec per unit time, and if the constant C1 is +1.667, the phase (ZBE) of the balancer is 10 Decreases in degree/sec. Meanwhile, when C1 is a negative number, it is natural that the balancer phase ZBE increases.
한편, 발란서의 회전속도(B_RPM)를 목표 회전속도(T_RPM)로 설정하고, 목표회전속도(T_RPM)에 도달하면, 위상 슬라이딩 회전속도 (PS_RPM) 로 설정하는 것 도 바람직하다. 본 명세서에서는 이 경우도 "발란서의 가동이 개시되면, 발란서의 회전속도(B_RPM)는 위상 슬라이딩 회전속도 (PS_RPM) 으로 설정한다" 로 표현한다.On the other hand, it is also preferable to set the rotational speed (B_RPM) of the balancer to the target rotational speed (T_RPM), and when the target rotational speed (T_RPM) is reached, set to the phase sliding rotational speed (PS_RPM). In this specification, this case is also expressed as "when the operation of the balancer starts, the rotational speed (B_RPM) of the balancer is set to the phase sliding rotational speed (PS_RPM)".
스텝 S103 : 본 스텝에서는, 발란서가 가동중이고, 발란서의 위상(ZBE)가 단위시간당 일정한 값으로 변하는 중 ( 다른 표현으로, “위상 슬라이딩 중” )에 선박진동의 크기를 대표하는 값(Vib_ps)을 측정하고, 발란서의 위상 대표값(ZBE_ps)을 측정한다. 이때 상기 진동의 크기를 대표하는 값은 실효값(rms), 평균값(avg), 피크-피크값(pp), 최대값(max) 또는 중위수 … 이 될 수 있다. 또한, FFT 결과값을 진동의 크기를 대표하는 값으로 사용할 수도 있다.Step S103: In this step, the balancer is operating and the phase (ZBE) of the balancer is changing at a constant value per unit time (in other words, “during phase sliding”), a value representing the magnitude of ship vibration (Vib_ps) and measure the phase representative value (ZBE_ps) of the balancer. At this time, the value representing the magnitude of the vibration is the effective value (rms), the average value (avg), the peak-to-peak value (pp), the maximum value (max), or the median... This can be. In addition, the FFT result value may be used as a value representing the magnitude of vibration.
본 발명에서는, 진동신호 수집시간보다 더 짧은 시간간격으로 측정값을 획득할 수도 있다. 과장되게 예를 들면, 데이터 수집기간이 10초이고, 데이터 해석 기간이 1초 이면, 통상 11 초 마다 한번씩 측정값이 획득된다. 한편, 초기 데이터 수집기간 10초 이후에, 1 초 간격으로 측정값을 획득할 수도 있다. 이것은 과거에 사용한 데이터 중에서, 최근 10초 이내에 해당하는 것은 재사용하면 된다.In the present invention, measurement values may be obtained at shorter time intervals than the vibration signal collection time. Taking an exaggerated example, if the data collection period is 10 seconds and the data analysis period is 1 second, a measurement value is usually obtained once every 11 seconds. Meanwhile, after 10 seconds of the initial data collection period, measurement values may be obtained at intervals of 1 second. Among the data used in the past, this can be reused within the last 10 seconds.
본 스텝에서 엔진의 영점에 대한 발란서의 영점 위상(ZBE)은 상기 데이터 수집 및 해석 기간 중에도 계속 변하고 있다. 따라서, 현재의 발란서 위상(ZBE)을 대표값(ZBE_ps) 으로 사용하는 것이 바람직하다.In this step, the balancer's zero point phase (ZBE) with respect to the engine's zero point continues to change during the data collection and analysis period. Therefore, it is preferable to use the current balancer phase (ZBE) as the representative value (ZBE_ps).
스텝 S104 : 본 스텝에서는 앞서 측정된 “선박진동의 크기를 대표하는 값(Vib_ps)” 및 “발란서의 위상 대표값(ZBE_ps)”을 메모리에 저장한다.Step S104: In this step, the previously measured "value representing the magnitude of vibration of the ship (Vib_ps)" and "representative value of the phase of the balancer (ZBE_ps)" are stored in memory.
스텝 S105 : 발란서 위상(ZBE)이 계속 감소 또는 계속 증가하여서 360 degree 이상 (즉, 한 바퀴 이상) 회전하였는지를 판단한다. 만약 발란서 위상 (ZBE)가 한 바퀴 이상을 회전하지 않았다면, 한 바퀴 이상을 회전할 때까지, S103 및 S104 를 계속 수행한다. 발란서 위상(ZBE)이 한 바퀴 이상을 회전하였다면, 스텝 S106 을 수행한다.Step S105: It is determined whether the balancer phase (ZBE) continues to decrease or continuously increases to rotate more than 360 degrees (ie, more than one turn). If the balancer phase (ZBE) does not rotate more than one rotation, S103 and S104 are continuously performed until it rotates more than one rotation. If the balancer phase (ZBE) has rotated more than one turn, step S106 is performed.
스텝 S106 : 스텝 S104 에서 저장한 선박진동의 대표값 중에서, 최소값의 (Vib_ps) 과 이때의 발란서 위상(ZBE_ps)을 찾는다. 상기 발란서 위상(ZBE_ps)은 선박진동을 최소로 하는 최적위상(ZBE_opt) 근처의 값(ZBE_near_opt)이 되고, 상기 발란서 위상 (ZBE_near_opt) 는 “안전영역” 안에 있다. Step S106: Among the representative values of ship vibration stored in step S104, the minimum value (Vib_ps) and the balancer phase (ZBE_ps) at this time are searched. The balancer phase (ZBE_ps) becomes a value (ZBE_near_opt) near the optimal phase (ZBE_opt) that minimizes vessel vibration, and the balancer phase (ZBE_near_opt) is within the “safe area”.
스텝 S107 : 본 스텝에서는 발란서의 위상을 미세하게 조정하여, 선박진동이 최소가 되도록 하는 최적의 발란서 위상 (ZBE_opt) 를 찾는 미세조정 스텝(이하, "미세조정 단계" 라고도 칭함.)이다.Step S107: This step is a fine adjustment step (hereinafter also referred to as "fine adjustment step") to find the optimal balancer phase (ZBE_opt) to minimize ship vibration by finely adjusting the phase of the balancer.
간단히 구체적인 수치로 일 예를 설명하면, 먼저 위상 슬라이등을 중지한다. 그리고, 최소값 위상(ZBE_near_opt)의 +/- 30 degree 구간에서 3 degree 간격으로 진동의 크기를 측정한다. 상기 진동값(y축)들을 위상(x축)에 매핑하여 그래프를 그렸을 때, 진동값의 기울기가 0 인 위상이 최적위상(ZBE_opt) 이다. 진동을 측정하는 위상간격을 더 작은 값으로 할수록, 최적위상(ZBE_opt)의 정확도가 더 높아짐은 당연하다. Briefly describing an example with concrete numerical values, first stop the phase sliding and the like. Then, the magnitude of the vibration is measured at 3 degree intervals in the +/- 30 degree section of the minimum phase (ZBE_near_opt). When a graph is drawn by mapping the vibration values (y-axis) to the phase (x-axis), the phase at which the slope of the vibration values is 0 is the optimal phase (ZBE_opt). Naturally, the smaller the phase interval for measuring the vibration, the higher the accuracy of the optimal phase (ZBE_opt).
다른 예로는, 앞선 스텝 S106에서 찾은 최소값 위상(ZBE_near_opt) 및 상기 최소값 위상(ZBE_near_opt)의 좌·우 위상에서 선박진동의 크기를 대표하는 값을 측정한다. 상기 3개의 위상에서 측정된 진동의 크기 중에서, 중앙위상에서 진동의 크기가 제일 작으면, 상기 중앙위상이 선박진동이 최소가 되도록 하는 최적의 발란서 위상(ZBE_opt) 이다.As another example, a value representing the magnitude of ship vibration is measured in the left and right phases of the minimum value phase (ZBE_near_opt) found in the previous step S106 and the minimum value phase (ZBE_near_opt). Among the magnitudes of vibration measured in the three phases, if the magnitude of vibration is the smallest in the central phase, the central phase is the optimal balancer phase (ZBE_opt) for minimizing ship vibration.
만약, 좌측위상 또는 우측위상에서 진동의 크기가 제일 작으면, 진동이 제일 작은 위상을 중앙위상으로 하여서, 상기 선박진동의 크기를 측정하는 절차를 다시 수행하여서 최적위상(ZBE_opt) 를 찾는다. 이때 좌우 위상은 중앙위상으로부터 1~10 degree 정도 떨어져 있는 것이 바람직할 수 있다. 상세하게는, 미세조정 초기에는 10 degree, 미세조정 말기에는 1 degree 가 떨어진 좌우 위상을 선택하는 것이 바람직할 수 있다.If the magnitude of vibration is the smallest in the left phase or the right phase, the optimal phase (ZBE_opt) is found by setting the phase with the smallest vibration as the center phase and performing the procedure for measuring the magnitude of ship vibration again. At this time, it may be preferable that the left and right phases are separated by about 1 to 10 degrees from the center phase. Specifically, it may be desirable to select left and right phases separated by 10 degrees at the beginning of the fine adjustment and 1 degree apart at the end of the fine adjustment.
또다른 예로는, 발란서의 회전속도(B_RPM)를 단위시간당 위상 변화량( degree/sec )을 작은값(예, 1 degree/sec)으로 하는 슬라이딩 회전속도 (PS_RPM) 로 할 수도 있다. 이때는 매우 촘촘한 위상간격으로 선박의 진동 크기를 측정할 수 있고, 이때 찾은 최소 진동의 위상 (ZBE_newr_opt) 는 최적 위상(ZBE_opt)일 가능성이 매우 높다.As another example, the rotation speed (B_RPM) of the balancer may be set to the sliding rotation speed (PS_RPM) in which the phase change amount (degree/sec) per unit time is a small value (eg, 1 degree/sec). At this time, it is possible to measure the vibration magnitude of the ship with a very tight phase interval, and the phase of the minimum vibration found at this time (ZBE_newr_opt) is very likely to be the optimal phase (ZBE_opt).
이상, "미세조정 단계"는 다양한 방법으로 수행할 수 있음을 설명하였다. 본 발명에서는 "미세조정 단계" 어떤 방법(본 명세서에 설명되지 않은 방법 포함)으로 수행되어도 본 발명의 취지를 벗어나지 않는다.It has been described above that the "fine-tuning step" can be performed in various ways. In the present invention, the "fine-tuning step" does not deviate from the spirit of the present invention even if it is performed in any method (including methods not described herein).
한편, 진동의 측정방법(상세하게는 데이터 수집기간), 발란서 제어기의 회전속도 및 발란서에 의한 선박의 최대진동 크기 등을 고려하여서 최적의 위상 슬라이딩 값 (degree/sec) 이 결정될 수 있음은 당연하다. 본 발명인이 수행한 실험에 의하면, "안전영역" 안에서 최적위상(ZBE_opt)을 찾을 때 슬라이딩 속도는 2~10 degree/sec 가 바람직하다.On the other hand, the optimal phase sliding value (degree/sec) can be determined by considering the vibration measurement method (data collection period in detail), the rotational speed of the balancer controller and the maximum vibration of the ship by the balancer. Of course. According to experiments conducted by the present inventors, when finding the optimal phase (ZBE_opt) within the "safe area", the sliding speed is preferably 2 to 10 degrees/sec.
본 스텝에서는 진동의 크기를 FFT 결과로 하는 것이 바람직할 수 있다. 이것은 진동신호를 FFT를 하면 협대역의 고성능 대역통과 필터(이하, “ BPF”) 를 사용하여서, 선박의 진동 크기를 측정한 것과 같아서 매우 정밀하고 재현성이 높은값을 획득할 수 있기 때문이다. 또한, 진동신호를 획득하는 경로에, 별도의 고성능 노이즈 제거필터를 사용하지 않고도, 매우 정밀한 진동크기를 획득할 수 있는 장점이 있기 때문이다. 또한, 발란서 위상(ZBE)이 “안정영역”에 있으므로, 하나의 위상에서 장시간에 걸쳐서 측정을 하여도 선박에 대미지를 줄 가능성이 낮다. 본 발명의 개시로, 최적 위상각(ZBE_opt)을 찾는데 걸리는 시간이 수분 이내가 될 것으로 예상한다. 그리고 "위험영역"에 머무는 시간은 수십초 이하가 될 것이다. 구체적인 수치로는 10 deg/sec 면 36초, 36 deg/sec 면 10초, 60 deg/sec 면 6초 의 약 2/3 이하 동안 "위험영역"에 머물게 될 것이다. 이것은 안전영역이 약 120도 정도 되기 때문이다.In this step, it may be desirable to set the amplitude of vibration as an FFT result. This is because when FFT is performed on the vibration signal, it is possible to obtain a very precise and highly reproducible value, the same as the measurement of the vibration magnitude of the ship, using a narrowband high-performance bandpass filter (hereinafter referred to as “BPF”). In addition, this is because there is an advantage in that a very precise vibration amplitude can be obtained without using a separate high-performance noise removal filter in a path for obtaining a vibration signal. In addition, since the balancer phase (ZBE) is in the "stable region", it is unlikely to damage the ship even if it is measured over a long period of time in one phase. With the disclosure of the present invention, it is expected that the time required to find the optimal phase angle (ZBE_opt) will be within a few minutes. And the time to stay in the "danger zone" will be less than tens of seconds. Specifically, it will stay in the "danger zone" for about 2/3 or less of 36 seconds at 10 deg/sec, 10 seconds at 36 deg/sec, and 6 seconds at 60 deg/sec. This is because the safe zone is about 120 degrees.
스텝 S108 : 본 스텝에서는 비휘발성 메모리에 엔진속도(E_RPM), 최적 위상각(ZBE_opt), 차수(n) 등을 기록을 한다. 이것은, 향후 발란서가 동작을 새로 개시할 때, 최적값을 찾는단계 없이 바로 발란서를 구동하기 위함이다.Step S108: In this step, engine speed (E_RPM), optimal phase angle (ZBE_opt), order (n), and the like are recorded in the non-volatile memory. This is to drive the balancer immediately without a step of finding an optimum value when the balancer starts operating again in the future.
스텝 S109 : 앞선 스텝에서 찾은 최적 위상각(ZBE_opt) 및 차수(n)로 발란서를 구동하여서 선박의 진동을 감소시킨다.Step S109: The vibration of the ship is reduced by driving the balancer with the optimal phase angle (ZBE_opt) and order (n) found in the previous step.
스텝 S110 : 선박의 주기관(M/E) 회전속도가 기 설정된 소정의 값 이하로 내려가면 발란서 구동을 종료한다. Step S110: When the rotational speed of the main engine (M/E) of the ship falls below a predetermined value, the balancer drive ends.
이상 본 발명의 제1 실시예를 상세히 설명하였다The first embodiment of the present invention has been described in detail above.
<실시예 2><Example 2>
본 실시예는 발란서의 위상(ZBE)이 “위험영역”에 머무는 시간이 제1 실시예보다 작은 것이 특징이다.This embodiment is characterized in that the time for the phase (ZBE) of the balancer to stay in the “danger zone” is smaller than that of the first embodiment.
이하 도6를 참고하여서, 본 발명의 바람직한 일 실시예를 설명한다.Referring to Figure 6, a preferred embodiment of the present invention will be described.
스텝 S200 : 선박 주기관(M/E)의 회전속도가 기 설정된 소정의 값보다 높아지면, 선박의 진동을 감소시키기 위하여 발란서 작동개시 절차에 진입한다. 그리고 상기 절차개시에 필요한 값들을 초기화한다. 그리고 다음 스텝인 S201 로 간다.Step S200: When the rotational speed of the ship's main engine (M/E) is higher than a predetermined value, a balancer operation start procedure is entered to reduce vibration of the ship. And, it initializes the values necessary for starting the procedure. Then, it goes to the next step, S201.
이하, 다음에 수행할 스텝의 숫자가 현재 수행중인 스텝의 숫자보다 1 큰 경우에는 “다음 스텝으로 간다”는 설명은 편의상 생략한다.Hereinafter, if the number of steps to be performed next is greater than the number of steps currently being performed by one, the description of “going to the next step” is omitted for convenience.
스텝 S201 : 발란서가 동작하지 않는 상태에서, FFT로 진동신호의 주파수 성분을 분석한다. FFT 결과에서 최대값을 가지는 주파수가 선박진동에 최대로 영향을 주는 회전속도이다. 제어 차수(이하, “차수”)는 엔진 회전속도 대비 발란서의 회전속도의 배수로 정의된다. 따라서 차수 n 는 앞서 설명한 공식 (1) 로 계산된다.Step S201: In a state where the balancer is not operating, the frequency component of the vibration signal is analyzed by FFT. The frequency with the maximum value in the FFT result is the rotational speed that has the maximum effect on ship vibration. The control order (hereinafter referred to as “order”) is defined as a multiple of the rotational speed of the balancer compared to the engine rotational speed. Therefore, the degree n is calculated by formula (1) described above.
스텝 S202: 발란서가 동작하지 않는 상태에서, 선박진동의 크기를 대표하는 값(Vib_un)을 측정한다. 상기 선박진동의 크기를 대표하는 값(Vib_un)은 실효값 (rms), 평균값(avg), 피크-피크값(pp), 최대값(max) 또는 중위수 … 이 될 수 있다. 또한, FFT 결과값을 진동의 크기를 대표하는 값으로 사용할 수도 있다.Step S202: In a state where the balancer is not operating, a value (Vib_un) representing the magnitude of ship vibration is measured. The value representing the magnitude of the ship vibration (Vib_un) is an effective value (rms), an average value (avg), a peak-to-peak value (pp), a maximum value (max), or a median... This can be. In addition, the FFT result value may be used as a value representing the magnitude of vibration.
본 발명에서는 한 종류의 값을 진동크기의 대표값으로 사용할 수도 있고, 다수 종류의 값을 사용하여서 하나의 값을 도출하고 그 값을 진동크기의 대표값으로 사용할 수도 있다. 이것은, 다수의 값을 사용하면 그 대표값이 노이즈에 강할 것으로 예상되기 때문이다In the present invention, one type of value may be used as a representative value of vibration amplitude, or a value may be derived using multiple types of values and used as a representative value of vibration amplitude. This is because when multiple values are used, the representative value is expected to be robust against noise.
스텝 S203: 1) 선박진동 감소에 필요한 발란서의 목표 회전속도(T_RPM) 및 발란서의 위상(ZBE)을 [ 단위시간당 소정의 값(degree/sec) 만큼 ] “일방향(예, 감소)”으로 변하게 하는 발란서의 회전속도 (PS_RPM) 을 상기 공식 (2) 및 (3)으로 계산한다. 이하, 상기 발란서의 회전속도 (PS_RPM) 은 “위상 슬라이딩 회전속도(PS_RPM)”이라 칭한다.Step S203: 1) Set the balancer's target rotation speed (T_RPM) and the balancer's phase (ZBE) required to reduce ship vibration [as much as a predetermined value (degree/sec) per unit time] in "one direction (eg, reduction)" Calculate the rotational speed (PS_RPM) of the balancer to be changed using the above formulas (2) and (3). Hereinafter, the rotational speed (PS_RPM) of the balancer is referred to as “phase sliding rotational speed (PS_RPM)”.
2) 발란서의 가동을 개시한다. 보다 상세하게는, 발란서의 편심질량체를 회전시키는 모터를 가동시킨다.2) Start the operation of the balancer. More specifically, a motor for rotating the eccentric mass of the balancer is operated.
이때, "발란서의 회전속도(B_RPM)는 위상 슬라이딩 회전속도 (PS_RPM) 으로 설정"하는 것이 바람직하다.At this time, it is preferable to "set the rotation speed (B_RPM) of the balancer to the rotation speed (PS_RPM) of the phase sliding".
한편, 발란서의 회전속도(B_RPM)를 목표 회전속도(T_RPM)로 설정하고, 목표회전속도(T_RPM)에 도달하면, 위상 슬라이딩 회전속도 (PS_RPM) 으로 설정하는 것 도 바람직하다. 본 명세서에서는 이 경우도 "발란서의 회전속도(B_RPM)는 위상 슬라이딩 회전속도 (PS_RPM) 으로 설정한다" 로 표현한다.On the other hand, it is also preferable to set the rotational speed (B_RPM) of the balancer to the target rotational speed (T_RPM), and when the target rotational speed (T_RPM) is reached, set to the phase sliding rotational speed (PS_RPM). In this specification, this case is also expressed as "the rotational speed (B_RPM) of the balancer is set to the rotational speed (PS_RPM) of the phase sliding".
설명의 편의상, 본 스텝에서는 상기 “일 방향”은 발란서 위상(ZBE)이 지속적으로 감소하는 방향으로 설정한다. 일 예로, 발란서 회전속도(B_RPM)을 [ 차수 * E_RPM + 1 ] 로 설정하면 발란서 위상(ZBE)는 6 degree/sec 로 감소한다.For convenience of explanation, in this step, the “one direction” is set to a direction in which the balancer phase ZBE continuously decreases. For example, if the balancer rotational speed (B_RPM) is set to [order * E_RPM + 1], the balancer phase (ZBE) decreases to 6 degrees/sec.
스텝 S204: 현재 발란서가 가동중이고, 발란서의 위상(ZBE)이 단위시간당 일정한 값으로 변하는 중 [ 다르게 표현하면, “위상 슬라이딩(ps:phase sliding) 중 ] 이다. 본 스텝에서는 위상 슬라이딩(ps) 중에 선박진동의 크기(Vib_ps) 및 발란서의 위상(ZBE_ps)를 측정한다.Step S204: The balancer is currently operating, and the phase (ZBE) of the balancer is changing at a constant value per unit time [in other words, “phase sliding (ps: phase sliding)]. In this step, the magnitude of ship vibration (Vib_ps) and balancer phase (ZBE_ps) are measured during the phase sliding (ps).
스텝 S205: “위상 슬라이딩(ps)” 중에 획득한 선박진동값(Vib_ps)이 발란서를 가동하지 않을 때 진동값(Vib_un) 을 비교한다.Step S205: The ship vibration value (Vib_ps) obtained during “phase sliding (ps)” is compared with the vibration value (Vib_un) when the balancer is not operating.
만약, Vib_ps <= Vib_un 이면, 다른 표현으로 발란서를 가동하여서 진동이 감소하였으면, 스텝 S221 에서 S224 를 순차적으로 수행한다. 즉 발란서의 위상을 미세하게 조정하여 최적 위상(ZBE_opt)를 찾고(S221, S107), 향후에 사용할 값들을 비휘발성 메모리에 저장(S222, S108) 하고, 최적위상(ZBE_opt)으로 발란서 위상을 추종(S223, S109) 하고, 엔진 회전속도(E_RPM)이 기 설정된 소정의 값보다 낮아지면 발란서 가동을 종료(S224, S110) 한다.If Vib_ps <= Vib_un, in other words, if the vibration is reduced by operating the balancer, steps S221 to S224 are sequentially performed. That is, finely adjusting the phase of the balancer to find the optimal phase (ZBE_opt) (S221, S107), storing the values to be used in the future in a non-volatile memory (S222, S108), and setting the phase of the balancer to the optimal phase (ZBE_opt). It follows (S223, S109), and when the engine rotation speed (E_RPM) is lower than a predetermined value, the balancer operation is terminated (S224, S110).
도6에는 표시하지 않았지만, 스텝 (S221) 에서 비휘발성 메모리에 최적 위상(ZBE_opt)이 저장되어 있는 경우(즉, "미세조정"을 이전에 수행한 적이 있는 경우)에는 미세조정 없이 바로 최적 위상(ZBE_opt)을 추종(S223)하는 것이 바람직하다.Although not shown in FIG. 6, if the optimal phase (ZBE_opt) is stored in the non-volatile memory at step S221 (ie, if “fine tuning” has been previously performed), the optimal phase ( ZBE_opt) is preferably followed (S223).
본 발명의 제1 실시예에서 스텝 S107 ~ S110 이 상세히 설명되어 있으므로, 상기 스텝 S221 ~ S224 에 대한 상세한 설명은 생략한다.Since steps S107 to S110 have been described in detail in the first embodiment of the present invention, a detailed description of steps S221 to S224 will be omitted.
한편 Vib_ps > Vib_un 이면, 다른 표현으로 발란서 가동 이전보다 선박의 진동이 크면, 스텝 S211 로 간다.On the other hand, if Vib_ps > Vib_un, in other words, if the vibration of the ship is greater than before the balancer operation, go to step S211.
스텝 S211: 현재는“위상 슬라이딩(ps)” 중에 획득한 선박진동값(Vib_ps)이 발란서 가동 이전(vib_un)보다 큰 상태이다. 그리고, 설명의 편의상, 스텝 S203 에서 발란서의 위상을 단위시간당 소정의 값만큼 감소하도록 설정하였으므로, 발란서의 위상(ZBE)은 계속 감소하고 있다.Step S211: Currently, the ship vibration value (Vib_ps) obtained during “phase sliding (ps)” is greater than before the balancer operation (vib_un). And, for convenience of description, since the phase of the balancer is set to decrease by a predetermined value per unit time in step S203, the phase (ZBE) of the balancer continues to decrease.
본 스텝에서는 [ “위상 슬라이딩(ps)” 중에 획득한 ] 선박진동값(Vib_ps)이 이전의 선박진동값(Vib_ps) 보다 감소하였는지를 조사한다. 이를 위해 선박진동값(Vib_ps) 는 2번 연속으로 측정을 할 수도 있다. 그리고 본 스텝이 루프 (S204-S205-S211) 및 (S204-S205-S211-S212) 속에 있으므로 이전의 S204 단계에서 측정한 값과 비교할 수도 있다.In this step, it is investigated whether the ship vibration value (Vib_ps) [obtained during “phase sliding (ps)”] has decreased from the previous ship vibration value (Vib_ps). To this end, the ship vibration value (Vib_ps) may be measured twice in succession. In addition, since this step is in the loop (S204-S205-S211) and (S204-S205-S211-S212), it can be compared with the value measured in the previous step S204.
한편, 시간이 흐르면 별도의 제어를 수행하지 않아도 발란서의 위상(ZBE)은 계속 감소하고, 그러면 선박의 진동크기는 반드시 증가하거나 감소하게 되어 있다(도2 참고). 만약 선박진동(Vib_ps)이 감소하였으면(Case Yes), 선박진동의 크기(Vib_ps)가 ( 발란서를 가동하지 않을 때의 ) 진동크기(Vib_un) 보다 작아질 때까지, 현재의 제어상태를 유지한다. 보다 상세하게는 측정스텝(S204) 과 비교 스텝(S205) 및 (S211)을 포함하는 루프를 수행한다.On the other hand, as time passes, the phase (ZBE) of the balancer continues to decrease even without performing separate control, and then the magnitude of vibration of the ship necessarily increases or decreases (see FIG. 2). If the ship vibration (Vib_ps) has decreased (Case Yes), the current control state is maintained until the ship vibration magnitude (Vib_ps) becomes smaller than the vibration magnitude (Vib_un) (when the balancer is not operating). More specifically, a loop including a measurement step (S204) and comparison steps (S205) and (S211) is performed.
스텝 S212: 본 스텝은, 스텝 S211에서 선박진동의 크기(Vib_ps) 가 증가하였다고 판정(Case No)되면, 수행하는 스텝이다. 그대로 두면, 진동의 크기가 계속 증가하다가, 최대값에 도달한 이후에 감소하여서 현재의 진동크기(Vib_ps) 까지 올 것이다. 본 스텝은 이때 소요되는 시간 및 선박에 가해질 진동 대미지를 제거하기 위한 스텝이다.Step S212: This step is performed when it is determined in step S211 that the magnitude of ship vibration (Vib_ps) has increased (Case No). If left as it is, the magnitude of the vibration will continue to increase, and after reaching the maximum value, it will decrease and come to the current magnitude of the vibration (Vib_ps). This step is a step for removing the time required at this time and the vibration damage to be applied to the ship.
이를 위하여, 본 스텝에서 “위상 슬라이딩” 방향을 “타 방향”으로 바꾼다. 상세하게는 발란서의 위상 (ZBE) 가 단위시간당 소정의 값만큼 증가(degree /sec) 하도록 발란서의 회전속도(B_RPM)를 설정한다. 일 예로, 발란서 회전속도 (B_RPM)을 [ 차수 * E_RPM - 1 ] 로 설정하면 발란서 위상(ZBE)는 약 6 degree/sec 로 증가한다. 이때, "위험영역"에 머무는 시간이 최대 40초 (= 360/6 * 2/3), 최소 20초 이므로 위상(ZBE)의 변화방향을 바꾸는 것이 바람직하다.To do this, change the “phase sliding” direction to “other direction” in this step. In detail, the rotation speed (B_RPM) of the balancer is set so that the phase (ZBE) of the balancer increases by a predetermined value per unit time (degree / sec). For example, if the balancer rotational speed (B_RPM) is set to [order * E_RPM - 1], the balancer phase (ZBE) increases to about 6 degrees/sec. At this time, it is desirable to change the change direction of the phase (ZBE) because the time to stay in the "danger zone" is a maximum of 40 seconds (= 360/6 * 2/3) and a minimum of 20 seconds.
만약 본 스텝에서 발란서 위상(ZBE)의 변화 방향을 “타 방향” (예, “증가”)으로 설정하는 것이 아니고, 현 변화 방향의 반대방향으로 설정한다면, 발란서의 위상(ZBE)이 특정구간에 갇혀서 그 구간을 벗어나지 못하는 경우가 발생할 수 있음에 주의하여야 한다. [ 참고, 도2에서 위상(ZBE) 280~300 degree 구간(LK) ]If, in this step, the change direction of the balancer phase (ZBE) is not set in the “other direction” (eg, “increase”), but is set in the opposite direction to the current change direction, the balancer phase (ZBE) is set to a specific Be aware that there may be cases where you are stuck in a section and cannot get out of that section. [Reference, Phase (ZBE) 280~300 degree section (LK) in Figure 2]
한편, 슬라이딩 방향의 변경이 없는 것이 바람직할 수도 있다. 이것은 도6에서 스텝 (S211) 및 (S212) 를 제거하고 루프 (S204-S205) 를 만들면 된다. 구체적인 예로, 위상(ZBE)이 60 degree/sec 로 변하면, "위험영역"에 머무는 시간이 최대 4초 (= 360/60 * 2/3) 이므로 위상(ZBE)의 변화방향을 바꾸지 않는 것이 바람직하다고 판단된다.On the other hand, it may be desirable that there is no change in sliding direction. This can be done by eliminating steps (S211) and (S212) in Fig. 6 and creating a loop (S204-S205). As a specific example, if the phase (ZBE) changes at 60 degree/sec, the time to stay in the "danger zone" is up to 4 seconds (= 360/60 * 2/3), so it is desirable not to change the direction of the phase (ZBE) change. judged
이상 본 발명의 제2 실시예를 상세히 설명하였다.The second embodiment of the present invention has been described in detail above.
한편, 본 발명의 실시예들에서 스텝 (201) 또는 (101) 을 제거한다면, 제어차수는 자동으로 찾을 수 없고 수동으로 입력을 하여야 한다.On the other hand, if step (201) or (101) is removed in the embodiments of the present invention, the control order cannot be found automatically and must be manually input.
본 발명에 따르면, "안전영역"에 빠르게 진입하기 위하여는 10 ~ 60 degree/sec 로 발란서의 위상(ZBE)이 증가 (또는 감소) 하도록 하는 것이 바람직하다.According to the present invention, in order to quickly enter the "safe area", it is preferable to increase (or decrease) the phase (ZBE) of the balancer at 10 to 60 degree/sec.
이상, 본발명에 대하여 그 바람직한 실시예를 살펴보았으나 이는 예시에 불과하며, 본 기술 분야의 통상적인 지식을 가진 자라면 이로부터 다양한 변형된 실시예가 가능함을 이해하여야 할 것이다. 그러므로 본 명세서와 도면에 개시된 본발명의 실시예들은 본발명의 기술내용을 쉽게 설명하고, 본발명의 이해를 돕기 위해 특정 예를 제시한 것일 뿐이며, 본발명의 범위를 한정하고자 하는 것은 아니다.Above, the preferred embodiment of the present invention has been reviewed, but this is only an example, and those having ordinary knowledge in the art should understand that various modified embodiments are possible therefrom. Therefore, the embodiments of the present invention disclosed in the present specification and drawings are only presented as specific examples to easily explain the technical content of the present invention and help understanding of the present invention, and are not intended to limit the scope of the present invention.
본 발명의 개시로, 1) 진동감쇄기의 최적위상 및 제어차수를 자동으로 찾고 설정하므로, 선박 건조 후 선박의 상태를 점검 및 조정하는 “시 운전”에서 별도의 조정인원이 필요 없다. 따라서, 진동감쇄기를 구비한 선박의 가격 경쟁력이 높아진다.With the disclosure of the present invention, 1) since the optimal phase and control order of the vibration damper are automatically found and set, a separate adjuster is not required in “trial operation” that checks and adjusts the state of the ship after the ship is built. Therefore, the price competitiveness of the ship equipped with the vibration damper is increased.
2) 유지보수 작업으로 영점의 위치가 변경되어도, 자동으로 최적 위상을 검출하여 설정할 수 있다. 따라서 선박의 유지보수 비용이 작아지는 효과가 있다.2) Even if the position of the zero point is changed due to maintenance work, the optimum phase can be automatically detected and set. Therefore, there is an effect of reducing the maintenance cost of the ship.
3) 또한 본발명에 따른 선박은, 진동감쇄기의 위상(ZBE)이 “위험영역”에 존재하는 시간이 종래보다 현저히 낮아지므로, 선박의 안전성이 높아진다.3) In addition, in the ship according to the present invention, since the time that the phase (ZBE) of the vibration damper exists in the “danger zone” is significantly lower than in the prior art, the safety of the ship is increased.
따라서 본발명에 따른 “진동감쇄기를 구비한 선박”은 산업상 이용가능성이 매우 높다.Therefore, the "vessel equipped with a vibration damper" according to the present invention has very high industrial applicability.
Claims (8)
Translated fromKoreanPriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020247009288AKR20240087710A (en) | 2021-08-20 | 2022-08-16 | Ships equipped with vibration dampers |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR20210110163 | 2021-08-20 | ||
| KR10-2021-0110163 | 2021-08-20 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023022458A1true WO2023022458A1 (en) | 2023-02-23 |
Family
ID=85240746
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/KR2022/012158CeasedWO2023022458A1 (en) | 2021-08-20 | 2022-08-16 | Ship equipped with balancer |
Country Status (2)
| Country | Link |
|---|---|
| KR (1) | KR20240087710A (en) |
| WO (1) | WO2023022458A1 (en) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0565939A (en)* | 1991-09-04 | 1993-03-19 | Toyota Motor Corp | Vehicle vibration reducing device |
| KR970010580A (en)* | 1995-08-09 | 1997-03-27 | 김정국 | Marine vibration control method and device |
| US20090263247A1 (en)* | 2008-04-21 | 2009-10-22 | Daniel Edward Mollmann | Dual rotor vibration monitoring |
| KR20130005065A (en)* | 2011-07-05 | 2013-01-15 | 현대중공업 주식회사 | Automatic phase tracking system |
| KR102087680B1 (en)* | 2019-07-23 | 2020-03-11 | 금오기전 주식회사 | Apparatus and method for measuring and compensating ship vibration using automatic vibration analysis and detection |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6025092A (en) | 1998-02-13 | 2000-02-15 | E. I. Du Pont De Nemours And Company | Fluorinated ionomers and their uses |
| KR101225943B1 (en) | 2010-08-21 | 2013-01-31 | 양승석 | Wireless charging device using electric wave |
| KR101217997B1 (en) | 2011-06-07 | 2013-01-02 | 노틸러스효성 주식회사 | Bill stacking apparatus with structure for repairing work easilly |
| JP6427508B2 (en) | 2016-01-08 | 2018-11-21 | 株式会社ニトムズ | Article support for wallpaper and anchor sheet for attachment |
- 2022
- 2022-08-16WOPCT/KR2022/012158patent/WO2023022458A1/ennot_activeCeased
- 2022-08-16KRKR1020247009288Apatent/KR20240087710A/enactivePending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0565939A (en)* | 1991-09-04 | 1993-03-19 | Toyota Motor Corp | Vehicle vibration reducing device |
| KR970010580A (en)* | 1995-08-09 | 1997-03-27 | 김정국 | Marine vibration control method and device |
| US20090263247A1 (en)* | 2008-04-21 | 2009-10-22 | Daniel Edward Mollmann | Dual rotor vibration monitoring |
| KR20130005065A (en)* | 2011-07-05 | 2013-01-15 | 현대중공업 주식회사 | Automatic phase tracking system |
| KR102087680B1 (en)* | 2019-07-23 | 2020-03-11 | 금오기전 주식회사 | Apparatus and method for measuring and compensating ship vibration using automatic vibration analysis and detection |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20240087710A (en) | 2024-06-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US4302813A (en) | Method of controlling operation of rotary machines by diagnosing abnormal conditions | |
| WO2023022458A1 (en) | Ship equipped with balancer | |
| WO2014054858A1 (en) | Apparatus and method for reducing vibration of machine tool | |
| WO2016017856A1 (en) | Method for calculating and controlling optimal control force of active mass damper | |
| JPS6248242B2 (en) | ||
| US6789422B1 (en) | Method and system for balancing a rotating machinery operating at resonance | |
| JP2020176998A (en) | Semiconductor devices, motor control systems, and error detection methods | |
| EP0052448A1 (en) | Photosensitive drum for electrostatic copying apparatus | |
| WO2020145509A2 (en) | Frequency extraction method using dj conversion | |
| Raman et al. | Experimental studies on the non-linear oscillations of imperfect circular disks spinning near critical speed | |
| WO2016140531A1 (en) | Clothing treatment device | |
| GB2201780A (en) | A noise-cancelling circuit for an ic engine knock-detector | |
| WO2020197094A1 (en) | Vibration damping device for machine tool spindle and machine tool comprising same | |
| KR20230049326A (en) | A vessel which has a vibration reducer | |
| RU2154813C1 (en) | Engine operation diagnosing method | |
| KR20230105928A (en) | A vessel which has a multi order vibration reducer | |
| EP3264107B1 (en) | Rejection of mechanical vibration induced noise in electrical measurements | |
| JP3129872B2 (en) | Unbalance correction method using high-speed tire uniformity machine | |
| Candidi et al. | FFT analysis of a space magnetometer noise | |
| SU1486960A1 (en) | Method for testing stator winding of induction motor of elevator machine for presence of short-circuited turns | |
| JPH06141449A (en) | Preventing method for galloping | |
| SU1709184A1 (en) | Method of automatic balancing rotor systems | |
| SU744332A1 (en) | Centrifugal apparatus | |
| Osman et al. | Short-time acceptance test for machine tools based on the random nature of the cutting forces | |
| RU2839593C1 (en) | Method of contact-non-contact diagnostics of technical state of high-voltage insulators under voltage |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application | Ref document number:22858695 Country of ref document:EP Kind code of ref document:A1 | |
| NENP | Non-entry into the national phase | Ref country code:DE | |
| 122 | Ep: pct application non-entry in european phase | Ref document number:22858695 Country of ref document:EP Kind code of ref document:A1 |