WO2021184747A1 - Control method and apparatus, and storage medium - Google Patents
Control method and apparatus, and storage mediumDownload PDFInfo
- Publication number
- WO2021184747A1 WO2021184747A1PCT/CN2020/121861CN2020121861WWO2021184747A1WO 2021184747 A1WO2021184747 A1WO 2021184747A1CN 2020121861 WCN2020121861 WCN 2020121861WWO 2021184747 A1WO2021184747 A1WO 2021184747A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- detection result
- result
- sensor
- detection
- electronic device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images








Classifications
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/24—Floor-sweeping machines, motor-driven
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4011—Regulation of the cleaning machine by electric means; Control systems and remote control systems therefor
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4061—Steering means; Means for avoiding obstacles; Details related to the place where the driver is accommodated
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/02—Measuring arrangements characterised by the use of optical techniques for measuring length, width or thickness
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B17/00—Measuring arrangements characterised by the use of infrasonic, sonic or ultrasonic vibrations
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/26—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable characterised by optical transfer means, i.e. using infrared, visible, or ultraviolet light
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/04—Automatic control of the travelling movement; Automatic obstacle detection
Definitions
- This applicationrelates to robotics, and in particular to a control method, device and storage medium.
- the downward-looking detection functionis the basic function of a mobile robot.
- the robot with the downward-looking detection functioncan detect whether the distance between itself and the ground is greater than the distance of falling from the cliff, and move based on the detection result to avoid falling damage to the robot.
- embodiments of the present applicationprovide a control method, device, and storage medium.
- the embodiment of the present applicationprovides a control method, including:
- the ground detection result of at least one first type sensor on the electronic deviceto obtain at least one first detection result
- obtain the ground detection result of at least one second type sensor on the electronic deviceto obtain at least one second detection result
- the detection accuracy of the first type sensoris greater than the detection accuracy of the second type sensor
- the detection resultindicates whether the distance between the corresponding sensor and its corresponding ground detection position is greater than the first distance
- the first judgment resultindicates that there is at least one second detection result that is different from the at least one first detection result
- use the at least one first type sensor pairto be different from the at least one first detection result
- At least one second test resultis verified, and at least one verification result is obtained;
- the electronic deviceBased on the at least one first detection result, the at least one second detection result, and the at least one verification result, the electronic device is controlled to move.
- the first judgment resultindicates that there is a second detection result that is different from the at least one first detection result; using the at least one first-type sensor pair to be different from the at least one first detection result
- the second test resultis verified, including:
- the electronic deviceis controlled to rotate in place; the first strategy is determined based on a first ground detection position; the first ground detection position is based on a different one from the at least one first detection result The second test result is confirmed;
- one of the at least one first type sensoris used to perform ground detection on the first ground detection position, so as to compare with the at least one first type sensor.
- a second test result with a different test resultis verified.
- the first judgment resultindicates that there are at least two second detection results that are different from the at least one first detection result; using the at least one first type sensor pair is different from the at least one first detection result At least two of the second test results are verified, including:
- the electronic deviceis controlled to rotate in place; the second strategy is determined based on at least two second ground detection positions; the at least two second ground detection positions are determined based on the relationship with the at least one first At least two second test results with different test results are confirmed;
- one of the at least one first-type sensoris used to perform ground detection on the at least two second ground detection positions, so as to compare with the at least one first-type sensor. At least two second test results with different first test results are verified.
- controlling the movement of the electronic device based on the at least one first detection result, the at least one second detection result, and the at least one verification resultincludes:
- the electronic deviceis controlled to move.
- the second judgment resultrepresents that each of the at least one updated second detection result is the same as the at least one first detection result
- the electronic deviceis controlled to move forward. Two distance.
- the controlling the movement of the electronic deviceincludes:
- the electronic deviceis controlled to advance a third distance.
- the second judgment resultrepresents that each of the at least one updated second detection result is the same as the at least one first detection result
- the electronic The devicerotates in place; the third strategy is determined according to the relative positions of the at least one first-type sensor and the at least one second-type sensor on the electronic device;
- the electronic deviceis controlled to advance a fourth distance.
- control deviceincluding:
- the obtaining unitis configured to obtain the ground detection result of at least one first type sensor on the electronic device to obtain at least one first detection result; and obtain the ground detection result of at least one second type sensor on the electronic device to obtain at least A second detection result; the detection accuracy of the first type sensor is greater than the detection accuracy of the second type sensor; the detection result indicates whether the distance between the corresponding sensor and its corresponding ground detection position is greater than the first distance;
- the first processing unitis configured to determine whether each second detection result in the obtained at least one second detection result is the same as the obtained at least one first detection result, to obtain the first judgment result;
- the second processing unitis configured to use the at least one first-type sensor pair and the at least one first detection result when the first judgment result indicates that there is at least one second detection result that is different from the at least one first detection result. Verifying at least one second detection result that is different from the first detection result to obtain at least one verification result;
- the third processing unitis configured to control the movement of the electronic device based on the at least one first detection result, the at least one second detection result, and the at least one verification result.
- An embodiment of the present applicationalso provides a control device, including: a processor and a memory configured to store a computer program that can run on the processor;
- the processoris configured to execute the steps of any of the foregoing methods when running the computer program.
- the embodiment of the present applicationalso provides a storage medium, the medium stores a computer program, and the computer program implements the steps of any of the foregoing methods when the computer program is executed by a processor.
- the control method, device, and storage mediumprovided by the embodiments of the present application obtain the ground detection result of at least one first-type sensor on an electronic device to obtain at least one first detection result; and obtain at least one second detection result on the electronic device.
- At least one second detection resultis obtained from the ground detection result of the type sensor; the detection accuracy of the first type sensor is greater than the detection accuracy of the second type sensor; the detection result represents the difference between the corresponding sensor and its corresponding ground detection position Whether the distance is greater than the first distance; whether each second detection result in the at least one second detection result obtained by judging is the same as the at least one first detection result obtained, and the first judgment result is obtained; and the first judgment result represents When there is at least one second detection result that is different from the at least one first detection result, the at least one first type sensor is used to verify at least one second detection result that is different from the at least one first detection result , Obtaining at least one verification result; based on the at least one first detection result, the at least one second detection result, and the at least one
- a multi-level precision downward-looking sensoris provided for the electronic device, that is, at least one high-precision first-type sensor and at least one low-precision second-type sensor are provided for the electronic device, and the ground of each sensor is obtained.
- the result and the verification result of the first-type sensorcontrol the movement of the electronic device; in this way, the accuracy of the down-view detection of the electronic device can be improved, thereby enhancing the user experience.
- FIG. 1is a schematic flowchart of a control method according to an embodiment of the application
- FIG. 2is a schematic diagram 1 of the location of the sensor in the sweeper according to the embodiment of the application;
- FIG. 3is a schematic diagram 2 of the installation position of the sensor in the sweeper according to the embodiment of the application;
- FIG. 4is a schematic diagram of an application scenario of a sweeper according to an embodiment of the application.
- Fig. 5is a schematic diagram of in-situ rotation of the sweeper according to the embodiment of the application.
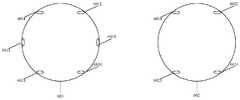
- Fig. 6is a schematic diagram of a sweeper according to an application embodiment of the application.
- FIG. 7is a schematic diagram of an application scenario of a sweeper according to an application embodiment of this application.
- FIG. 8is a schematic structural diagram of a control device according to an embodiment of the application.
- FIG. 9is a schematic diagram of the hardware structure of the control device according to an embodiment of the application.
- the downward-looking sensoris usually installed for the mobile robot to configure the downward-looking detection function of the robot; specifically, the downward-looking sensor is installed on the bottom of the robot, and when the robot moves, the bottom-looking sensor detects the ground clearance of the robot.
- the downward looking sensorcan be a proximity sensor or a ranging sensor; the detection accuracy of the proximity sensor is low, and the price is low, including infrared proximity sensors, laser proximity sensors, etc.; the detection accuracy of the ranging sensor is high, and the price is expensive, including infrared measurement.
- Distance sensor, laser distance sensor, ultrasonic distance sensor, etc.In practical applications, in order to detect cliffs in different directions, at least two downward-looking sensors are usually installed at the bottom of the robot, and the installed at least two downward-looking sensors are usually the same type of downward-looking sensors, which makes the robot's downward-looking detection function There are the following shortcomings:
- the accuracy of the downward-looking detection of the robotwill be low; taking the infrared proximity sensor as an example, since the reflection intensity of the infrared signal will be affected by the color of the reflector, When the robot moves to a dark ground (such as a black carpet), the ground will absorb a large amount of the emitted light (ie infrared signal) from the infrared proximity sensor, resulting in a small amount of light reflected on the ground. The infrared proximity sensor will misjudge the ground as a cliff. The robot cannot move on the dark ground; and in a strong daylight environment, the infrared proximity sensor is also susceptible to strong light interference, and it is easy to misjudge the normal ground as a cliff.
- the infrared proximity sensoris also susceptible to strong light interference, and it is easy to misjudge the normal ground as a cliff.
- the electronic devicei.e. robot
- a multi-level precision downward-looking sensorthat is, the electronic device is provided with at least one high-precision first-type sensor (i.e., ranging sensor) and At least one low-precision type 2 sensor (ie proximity sensor), after obtaining the ground detection result of each sensor, determine whether the ground detection result of the second type sensor is the same as the ground detection result of the first type sensor.
- the first type of sensorverifies the ground detection results of the second type of sensor, and controls the movement of the electronic device based on the ground detection results of each sensor and the verification result of the first type of sensor; in this way, the detection accuracy of the first type of sensor is greater than that of the second type of sensor
- the price of the second type of sensoris lower than that of the first type of sensor; therefore, the solution of the embodiment of this application can improve the accuracy of the down-view detection of the electronic device under the premise of controlling the cost of the electronic device , Configure low-cost, high-precision down-view detection functions for electronic devices to improve user experience.
- the embodiment of the present applicationprovides a control method. As shown in FIG. 1, the method includes the following steps:
- Step 101Obtain the ground detection result of at least one first-type sensor on an electronic device to obtain at least one first detection result; and obtain the ground detection result of at least one second-type sensor on the electronic device to obtain at least one first detection result. 2. Test results;
- the detection accuracy of the first type sensoris greater than the detection accuracy of the second type sensor; the detection result indicates whether the distance between the corresponding sensor and its corresponding ground detection position is greater than the first distance;
- Step 102Determine whether each second detection result in the obtained at least one second detection result is the same as the obtained at least one first detection result, and obtain a first judgment result;
- Step 103When the first judgment result indicates that there is at least one second detection result that is different from the at least one first detection result, use the at least one first-type sensor pair to compare with the at least one first detection result. At least one second test result with different results is verified, and at least one verification result is obtained;
- Step 104Control the movement of the electronic device based on the at least one first detection result, the at least one second detection result, and the at least one verification result.
- the electronic devicemay be a mobile robot such as a sweeper or a balance car; the first type of sensor and the second type of sensor may be down-looking sensors; the first type of sensor may be It is a distance measuring sensor, such as an infrared distance measuring sensor, a laser distance measuring sensor, an ultrasonic distance sensor, etc.; the second type of sensor may be a proximity sensor, such as an infrared proximity sensor, a laser proximity sensor, etc.
- the number of sensors of the first type, the number of sensors of the second type, and the location of each sensor on the electronic devicecan be determined by the research and development personnel according to design requirements.
- a first type sensor and a second type sensorcan be set on the sweeper.
- the positions of the two sensors on the sweepercan be as shown in Figure 2.
- the two sensorscan be set on both sides of the sweeper, for example, At the bottom of the sweeper 201, the sensor 2011 can be the first type sensor, while the sensor 2012 is the second type sensor; of course, the sensor 2011 can also be the second type sensor, and at the same time, the sensor 2012 is the first type sensor; or, two The two sensors can be arranged on the same side of the sweeper.
- the sensor 2021can be the first type of sensor, while the sensor 2022 is the second type of sensor; of course, the sensor 2021 can also be the second type of sensor. At the same time, the sensor 2022 is the first type of sensor.
- at least three sensorscan be provided on the sweeper, such as three sensors, four sensors, five sensors or six sensors (the R&D personnel can also set more than seven sensors according to design requirements); the at least three sensors At least one sensor in the at least three sensors is a first-type sensor, and at the same time, the number of the first-type sensors in the at least three sensors is less than 3.
- the positions of three sensors, four sensors, five sensors, and six sensors on the sweepercan be as shown in Figure 3.
- Multiple sensorscan be symmetrically arranged based on a central axis of the sweeper, for example on the bottom of the sweeper 301, Four sensors can be installed: sensor 3011, sensor 3012, sensor 3013, and sensor 3014. At least one of the four sensors can be the first type sensor. At the same time, the number of the first type sensor in the four sensors is less than 4 Or, for example, at the bottom of the sweeper 302, six sensors can be installed: sensor 3021, sensor 3022, sensor 3023, sensor 3024, sensor 3025, and sensor 3026, at least one of the six sensors can be the first type of sensor At the same time, the number of sensors of the first type among the six sensors is less than 6. Of course, multiple sensors can also be arranged asymmetrically.
- three sensorscan be installed: sensor 3031, sensor 3032, and sensor 3033. At least one of the three sensors can be the first type of sensor. At the same time, the number of the first type of sensors in the three sensors is less than 3; or, for example, on the bottom of the sweeper 304, five sensors can be installed: sensor 3041, sensor 3042, sensor 3043, sensor 3044 and sensor 3045, five At least one of the sensors may be a first-type sensor, and at the same time, the number of the first-type sensors in the five sensors is less than five.
- the first distanceis the above-mentioned preset falling distance from the cliff; the first distance may also be determined by the research and development personnel according to design requirements.
- the corresponding detection resultmay be "cliff"; in the case where the distance between the sensor and its corresponding ground detection position is less than or equal to the first distance, the corresponding detection result The detection result can be "non-cliff".
- the expression form of the detection resultcan also be determined by the research and development personnel according to design requirements; for example, in the case where the distance between the sensor and its corresponding ground detection position is greater than the first distance, the corresponding detection result can also be "1"; In the case where the distance between the sensor and its corresponding ground detection position is less than or equal to the first distance, the corresponding detection result may be "0".
- the probability that the robot is in the forward stateis much greater than the probability that the robot is in the backward state during most of the robot's movement; taking the sweeper as an example, when the sweeper is moving, it may be 80% The probability is in the forward state, and the probability of 20% is in the backward state; therefore, in order to improve the efficiency of the down-view detection of the electronic device, the at least one first-type sensor may be arranged on the forward side of the bottom of the electronic device; the electronic device The forward side of the bottom is the side on which the bottom of the electronic device faces forward when the electronic device is controlled to move forward (the specific range of the forward side of the bottom of the electronic device can be determined by the research and development personnel according to design requirements).
- the first detection result of each first-type sensor in the at least one first-type sensoris the same.
- the electronic devicecan be controlled Advance a preset distance; the preset distance can be determined by the research and development personnel according to design requirements, for example, the research and development personnel can be based on the sensors provided on the forward side of the bottom of the electronic device and the drive components of the electronic device (for example, auxiliary wheels) The relative position of the determines the preset distance.
- the rotation strategymay include multiple angles of the electronic device's in-situ rotation, the direction of in-situ rotation, the number of in-situ rotations, and each rotation.
- step 103in actual application, since the first judgment result indicates that there is at least one second detection result that is different from the at least one first detection result, it is necessary to use the at least one first-type sensor pair At least one second detection result that is different from the at least one first detection result is verified; therefore, in order to further improve the efficiency of down-view detection of the electronic device, the number of sensors of the first type can be increased, that is, on the electronic device At least two sensors of the first type are provided; in this way, when the total number of sensors of the electronic device is fixed, increasing the number of sensors of the first type will reduce the number of sensors of the second type.
- the class sensorverifies at least one second detection result that is different from the at least one first detection result, the number of verifications is also reduced, thereby improving the efficiency of down-view detection of the electronic device.
- only one second detection resultmay need to be verified, that is, Among the obtained at least one second detection result, there may be a second detection result that is different from the at least one first detection result.
- the first judgment resultindicates that there is a second detection result that is different from the at least one first detection result; using the at least one first type sensor pair and the at least one first detection result
- the verification of a second test result with different test resultsmay include:
- the electronic deviceis controlled to rotate in place; the first strategy is determined based on a first ground detection position; the first ground detection position is based on a different one from the at least one first detection result The second test result is confirmed;
- one of the at least one first type sensoris used to perform ground detection on the first ground detection position, so as to compare with the at least one first type sensor.
- a second test result with a different test resultis verified.
- a first detection result corresponding to a second detection result that is different from the at least one first detection resultcan be determined.
- the determined ground detection position corresponding to the second type sensoris determined as the first ground detection position; at the same time, one of the at least one first type sensor is determined as the verification sensor (here , The R&D personnel may determine any one of the at least one first type sensor as a verification sensor according to design requirements, or the at least one first type sensor may be compared with the first ground detection position
- the first type of sensor with the smallest distanceis determined to be the verification sensor); the first strategy is determined according to the determined first ground detection position and the setting position of the verification sensor on the electronic device; the first strategy may include the electronic The angle at which the device rotates in place (e.g.
- the direction in which it rotates in placee.g. clockwise or counterclockwise
- the pause time after rotating the corresponding anglee.g. 0.1s
- whether to reset the electronic device when it stops rotatingThat is, control the electronic device to turn back to the state before starting to rotate in place
- verify that the ground detection position corresponding to the sensoris The first ground detection position; within the pause time included in the first strategy, the verification sensor is used to perform ground detection on the first ground detection position to obtain a third detection result; at this time, the obtained first ground detection position can be directly 3.
- the detection resultis determined to be a verification result, and it can also be determined whether a second detection result that is different from the at least one first detection result is the same as the obtained third detection result; if it is the same, the verification result is determined to be "correct”; If they are different, the verification result is determined to be "error”; if the first strategy includes the information of resetting the electronic device when the rotation is stopped, after verification is completed (that is, a second test result that is different from the at least one first test result is completed) In the case of verification of the detection result), reset the electronic device.
- the electronic deviceis a sweeper, and a total of four downward-looking sensors are provided at the bottom of the sweeper, among which the sensor 401 is a range-finding sensor (that is, the first type of sensor) , Sensor 402, sensor 403 and sensor 404 are proximity sensors (the second type of sensors); in a non-glare environment, the sweeper moves northward, when the sweeper moves from the white carpet to the edge of the black carpet, that is to say When the sensor 401 and the sensor 402 enter the black carpet area, the ground detection results of the four sensors are obtained respectively; at this time, the ground detection result of the sensor 401 is "non-cliff", the ground detection result of the sensor 402 is "cliff”, and the sensor The ground detection results of 403 and sensor 404 are also “non-cliff”; it can be seen that the ground detection result of sensor 402 is different from the ground detection result of sensor 401, and the ground detection result of sensor 402 needs to be verified by sensor
- the sweeperis controlled to rotate clockwise in situ until the sensor 401 reaches the position where the sensor 402 was before the sweeper rotates. At this time, the ground detection result of the sensor 401 is obtained, and the ground detection result obtained is "Non "Cliff", that is, the verification result obtained is "non-cliff".
- the first judgment resultindicates that there are at least two second detection results that are different from the at least one first detection result; using the at least one first type sensor pair and the at least one
- the verification of at least two second test results with different first test resultsmay include:
- the electronic deviceis controlled to rotate in place; the second strategy is determined based on at least two second ground detection positions; the at least two second ground detection positions are determined based on the relationship with the at least one first At least two second test results with different test results are confirmed;
- one of the at least one first-type sensoris used to perform ground detection on the at least two second ground detection positions, so as to compare with the at least one first-type sensor. At least two second test results with different first test results are verified.
- each of the multiple second detection resultscan be determined.
- the second-type sensor corresponding to the second detection resultis determined, that is, multiple second-type sensors are determined, and the ground detection position corresponding to each second-type sensor in the determined multiple second-type sensors is determined as a second ground Detect positions to obtain multiple second ground detection positions; at the same time, determine one of the at least one first type sensor as a verification sensor (here, the at least one first type sensor may be determined by the R&D personnel according to design requirements) Any sensor of the first type in the first type of sensors is determined to be the verification sensor, and the first type of sensor with the smallest distance from the first ground detection position among the at least one first type of sensor may also be determined as the verification sensor); Determine the second strategy according to the verification sensor's setting position on the electronic device and the obtained multiple second ground detection positions; the second strategy may include multiple angles and in-situ rotation
- the verification sensoris used to perform ground detection on the second ground detection position, and multiple third detection results are obtained; at this time, each of the multiple third detection results obtained can be directly determined as one third detection result
- the verification result, multiple verification resultsare obtained; of course, for each third detection result in the multiple third detection results, the second ground detection position corresponding to the corresponding third detection result can also be determined, and then based on the determined second ground detection result
- the detection positiondetermines the second detection result corresponding to the corresponding third detection result, and determines whether the determined second detection result is the same as the corresponding third detection result.
- the verification resultis determined to be “correct”; if it is different, the verification result is determined to be " Error”; if the second strategy includes the information of resetting the electronic device when the rotation is stopped, reset the electronic device when the verification is completed (that is, the verification of multiple second detection results is completed).
- the sweeper shown in Figure 4moves to a white carpet area in a strong daylight environment, that is, sensor 401, sensor 402 .
- the ground detection positions corresponding to the sensor 403 and the sensor 404are white carpets, the ground detection results of the four sensors are obtained respectively; at this time, the ground detection result of the sensor 401 is "non-cliff", the sensor 402, the sensor 403 and the sensor 404
- the ground detection results of sensorsare all “cliffs”; it can be seen that the ground detection results of sensors 402, 403, and 404 are all different from the ground detection results of sensor 401.
- step 104in actual application, after at least one verification result is obtained, the obtained verification result can be used to update the obtained at least one second detection result to obtain the updated at least one second detection result; At least one second detection result and at least one first detection result of the control of the electronic device to move.
- controlling the movement of the electronic device based on the at least one first detection result, the at least one second detection result, and the at least one verification resultmay include:
- the electronic deviceis controlled to move.
- said using said at least one verification result to update said at least one second detection resultmay include: replacing said at least one second detection result with said at least one of said at least one verification result by said at least one verification result. At least one second detection result that is different from the first detection result.
- a first detection resultis obtained (the ground detection result of the sensor 401 is "non-cliff"), and Three second detection results (the ground detection result of sensor 402 is "cliff", the ground detection results of sensor 403 and sensor 404 are both "non-cliff”); after using sensor 401 to verify the ground detection result of sensor 402, we get The verification result for sensor 402 is “non-cliff”; at this time, the three second detection results are updated with the verification results, and three updated second detection results are obtained: sensor 402-“non-cliff”, sensor 403-“non-cliff” "Cliff” and sensor 404-"non-cliff”; the first detection result and the three updated second detection results are both "non-cliff", that is, the second judgment result represents the three updated second detection results
- Each second detection result ofis the same as the first detection result; it can be seen that there is no cliff in the application scenario shown in FIG. 4, and the sweeper can be controlled to move forward
- the second judgment resultrepresents that each of the at least one updated second detection result is the same as the at least one first detection result;
- the control The movement of the electronic devicemay include:
- the electronic deviceis controlled to move forward. Two distance.
- the electronic deviceis controlled to move based on the determined forward direction. Specifically, taking the application scenario shown in FIG. 4 as an example, assuming that the black carpet in FIG.
- the first detection result of the sensor 401is "cliff”
- the second detection result of the sensor 402is also "Cliff”
- the second detection result of sensor 403 and the second detection result of sensor 404are both “non-cliff”
- the sensor 401needs to be used to verify the second detection result of the sensor 403 and the second detection result of the sensor 404; the verification result of the sensor 403 "non-cliff” and the verification result of the sensor 404 "non-cliff” are obtained; , Use the verification results to update the three second detection results, and get three updated second detection results: sensor 402-"cliff", sensor 403-"non-cliff” and sensor 404-"non-cliff”; after three updates In the second detection result of, there are two updated second detection results that are different from the first detection result; it can be seen that there is a cliff in
- the controlling the movement of the electronic devicemay include:
- the electronic deviceis controlled to advance a third distance.
- the second judgment resultrepresents at least one updated second detection result
- the at least one second detection resultmay also exist
- the updated second detection result and the at least one first detection resultindicate that the distance between the corresponding sensor and its corresponding ground detection position is greater than the first distance (for example, all detection results are "cliffs").
- the rotation strategycan be determined according to the relative positions of the sensors on the electronic device.
- the rotation strategycan include multiple angles of the electronic device's in-situ rotation, the direction of in-situ rotation, the number of in-situ rotations, and Information about the pause time after rotating the corresponding angle and whether to reset the electronic device when the rotation is stopped (that is, control the electronic device to return to the state before starting to rotate in place); and control the electronic device based on the determined rotation strategy principle Ground rotation, in the process of in-situ rotation, at least one sensor of the first type is used to perform downward-looking detection, determine the forward direction according to the result of downward-looking detection, and control the electronic device to advance the preset distance according to the determined forward direction.
- the second judgment resultrepresents that each of the at least one updated second detection result is the same as the at least one first detection result;
- the control The movement of the electronic devicemay include:
- the electronic The devicerotates in place; the third strategy is determined according to the relative positions of the at least one first-type sensor and the at least one second-type sensor on the electronic device;
- the electronic deviceis controlled to advance a fourth distance.
- the second distance, the third distance, and the fourth distancemay be the same or different, and may be specifically determined by the research and development personnel according to design requirements.
- the control method provided by the embodiment of the present applicationobtains the ground detection result of at least one first type sensor on an electronic device to obtain at least one first detection result; and obtains the ground detection result of at least one second type sensor on the electronic device As a result, at least one second detection result is obtained; the detection accuracy of the first type sensor is greater than that of the second type sensor; the detection result indicates whether the distance between the corresponding sensor and its corresponding ground detection position is greater than that of the first type sensor.
- the electronic deviceis controlled to move; in this way, the electronic device can be controlled to increase the cost of the electronic device.
- the accuracy of the device's down-view detectionis to configure low-cost, high-precision down-view detection functions for electronic devices to improve user experience.
- the electronic deviceis a sweeping robot (denoted as "sweeper” in the following description); the bottom of the sweeper is provided with a downward-looking sensor system composed of multi-level precision sensors; here, multi-level precision
- the meaning of the sensoris: the type, model or ground detection accuracy of each sensor is different.
- the downward-looking sensor systemis composed of a high-precision sensor (that is, the above-mentioned first type of sensor) and a plurality of low-precision sensors (that is, the above-mentioned second type of sensor);
- the sensorcan be a proximity sensor. Since the detection accuracy of the distance measuring sensor is usually at the centimeter level, the distance measuring sensor will not have the problem of inaccurate detection results caused by dark ground, nor will it cause the problem of sensor failure caused by strong sunlight.
- the number of sensors included in the down-view sensor systemcan be determined by the R&D personnel according to the design requirements.
- the downward-looking sensor systemcan include four sensors: a distance measuring sensor and three proximity sensors; taking the sweeper 602 shown in Figure 6 as an example ( Figure 6 shows the reverse side of the sweeper 602), the sensor 6021 can be The distance measuring sensors, the sensor 6022, the sensor 6023, and the sensor 6024 may be proximity sensors.
- the downward-looking sensor systemmay include six sensors: a distance measuring sensor and five proximity sensors; taking the sweeper 601 shown in Figure 6 as an example ( Figure 6 shows the reverse side of the sweeper 601), the sensor 6011 can For distance measuring sensors, the sensor 6012, the sensor 6013, the sensor 6014, the sensor 6015, and the sensor 6016 may be proximity sensors.
- Figure 7is a schematic diagram of an application scenario of the application embodiment ( Figure 7 shows the front of the sweeper 601). As shown in Figure 7, the sweeper 601 moves northward. The overlapping part of the machine 601 and the black carpet can be regarded as the front end of the sweeper 601) When running to the black carpet, the sensors 6011 and 6012 of the sweeper 601 are above the black carpet; at this time, the six sensors of the sweeper 601 are on the ground.
- the test resultsare:
- the ground detection result of sensor 6011is “non-cliff”.
- the ground detection result of sensor 6012is "cliff"
- the ground detection result of sensor 6013is “non-cliff”.
- the ground detection result of sensor 6014is “non-cliff”.
- the ground detection result of sensor 6015is “non-cliff”.
- the ground detection result of sensor 6016is "non-cliff"
- the ground detection result of the sensor 6012is different from the ground detection result of the sensor 6011; the sweeper 601 is controlled to rotate counterclockwise and the sensor 6011 is rotated to the position of the sensor 6012, and the ground detection result of the sensor 6012 is verified by the sensor 6011 ,
- the ground detection result of the sensor 6011shall prevail; the conclusion that the sensor 6011 verifies the ground detection result of the sensor 6012 is "non-cliff"; thus, in the application scenario shown in FIG.
- the six sensor pairs of the sweeper 601The comprehensive conclusion of the ground detection is "not a cliff"; at this time, you can control the sweeper 601 to rotate clockwise back to the original forward direction (that is, the direction of northward advancement), and control the sweeper 601 to continue to advance northward for a preset distance. After the preset distance, repeat the above steps, that is, re-acquire and judge the ground detection results of the six sensors.
- the preset distancemay be determined according to the relative positions of the sensor 6011, the sensor 6012, and the auxiliary wheel of the sweeper 601.
- the sweeper 602moves northward and enters a strong daylight environment; at this time, the ground detection results of the four sensors of the sweeper 602 are:
- the ground detection result of sensor 6021is “non-cliff”.
- the ground detection result of sensor 6022is "cliff"
- the ground detection result of sensor 6023is "cliff"
- the ground detection result of sensor 6024is "cliff"
- the ground detection results of the sensor 6022, the sensor 6023 and the sensor 6024are different from the ground detection result of the sensor 6021; the sweeper 602 is controlled to rotate clockwise or counterclockwise, and the sensor 6021 is rotated to the sensor 6022, the sensor 6023 and the sensor respectively.
- the conclusions of the verificationare all "non-cliff”; in this application scenario, the comprehensive conclusion of the four sensors of the sweeper 602 on the ground detection is "non-cliff"; at this time, the sweeper 602 can be controlled clockwise or counterclockwise.
- the hour handrotates in place to return to the original forward direction (that is, the direction of northward advancement), and the sweeper 602 is controlled to continue to advance northward for a preset distance.
- the preset distancemay be determined according to the relative positions of the sensor 6021, the sensor 6022, and the auxiliary wheel of the sweeper 602.
- the six sensors of the sweeper 601 and the sweeper 602can all normally detect the non-cliff ground as "non-cliff".
- the detection accuracy of the multiple sensorsis classified into one high-precision sensor and multiple low-precision sensors; making the sweeper inaccurate with a few low-precision down-view sensors
- the high-precision downward-looking sensoris moved to the position of the low-precision downward-looking sensor for secondary detection; this way, it can solve the problem of low-precision downward-looking sensors in a few scenes. (Such as dark carpets, strong daylight environment), but also can maintain a lower cost for the sweeper; that is to say, in the case of adding a small amount of cost to the sweeper, improve the accuracy of the sweeper's down-view detection .
- the embodiment of the present applicationalso provides a control device.
- the control device 800includes an acquiring unit 801, a first processing unit 802, a second processing unit 803, and a third processing unit. Unit 804; where,
- the acquiring unit 801is configured to acquire a ground detection result of at least one first-type sensor on an electronic device to obtain at least one first detection result; and acquire a ground detection result of at least one second-type sensor on the electronic device , Obtain at least one second detection result; the detection accuracy of the first type sensor is greater than the detection accuracy of the second type sensor; the detection result indicates whether the distance between the corresponding sensor and its corresponding ground detection position is greater than the first distance ;
- the first processing unit 802is configured to determine whether each second detection result in the obtained at least one second detection result is the same as the obtained at least one first detection result, and obtain the first judgment result;
- the second processing unit 803is configured to use the at least one first-type sensor pair and when the first judgment result indicates that there is at least one second detection result that is different from the at least one first detection result. Verifying the at least one second detection result that is different from the at least one first detection result to obtain at least one verification result;
- the third processing unit 804is configured to control the movement of the electronic device based on the at least one first detection result, the at least one second detection result, and the at least one verification result.
- the first judgment resultindicates that there is a second detection result that is different from the at least one first detection result; the second processing unit 803 is further configured to:
- the electronic deviceis controlled to rotate in place; the first strategy is determined based on a first ground detection position; the first ground detection position is based on a different one from the at least one first detection result The second test result is confirmed;
- one of the at least one first type sensoris used to perform ground detection on the first ground detection position, so as to compare with the at least one first type sensor.
- a second test result with a different test resultis verified.
- the first judgment resultindicates that there are at least two second detection results that are different from the at least one first detection result; the second processing unit 803 is further configured to:
- the electronic deviceis controlled to rotate in place; the second strategy is determined based on at least two second ground detection positions; the at least two second ground detection positions are determined based on the relationship with the at least one first At least two second test results with different test results are confirmed;
- one of the at least one first-type sensoris used to perform ground detection on the at least two second ground detection positions, so as to compare with the at least one first-type sensor. At least two second test results with different first test results are verified.
- the third processing unit 804is further configured to:
- the electronic deviceis controlled to move.
- the second judgment resultrepresents that each updated second detection result in the at least one updated second detection result is the same as the at least one first detection result;
- the third processing unit 804also configured as:
- the electronic deviceis controlled to move forward. Two distance.
- the second judgment resultindicates that there is at least one updated second detection result that is different from the at least one first detection result; the third processing unit 804 is further configured to:
- the electronic deviceis controlled to advance a third distance.
- the second judgment resultrepresents that each updated second detection result in the at least one updated second detection result is the same as the at least one first detection result;
- the third processing unit 804also configured as:
- the electronic The devicerotates in place; the third strategy is determined according to the relative positions of the at least one first-type sensor and the at least one second-type sensor on the electronic device;
- the electronic deviceis controlled to advance a fourth distance.
- the acquisition unit 801, the first processing unit 802, the second processing unit 803, and the third processing unit 804can be implemented by a processor in the control device 800 in combination with a communication interface.
- control device 800 provided in the above embodimentcontrols an electronic device
- only the division of the above-mentioned program modulesis used as an example for illustration.
- the above-mentioned processingcan be allocated by different program modules as needed. That is, the internal structure of the terminal is divided into different program modules to complete all or part of the processing described above.
- the control device 800 provided in the foregoing embodimentbelongs to the same concept as the control method embodiment, and its specific implementation process is detailed in the method embodiment, which will not be repeated here.
- the embodiment of the present applicationalso provides a control device.
- the control device 900includes:
- the communication interface 901can exchange information with other devices (such as network devices, terminals, etc.);
- the processor 902is connected to the communication interface 901 to implement information interaction with other devices, and when configured to run a computer program, it executes the methods provided by one or more of the above technical solutions;
- the memory 903is configured to store a computer program that can run on the processor 902.
- the processor 902is configured to:
- the ground detection result of at least one first type sensor on the electronic deviceto obtain at least one first detection result
- obtain the ground detection result of at least one second type sensor on the electronic deviceto obtain at least one second detection result
- the detection accuracy of the first type sensoris greater than the detection accuracy of the second type sensor
- the detection resultindicates whether the distance between the corresponding sensor and its corresponding ground detection position is greater than the first distance
- the first judgment resultindicates that there is at least one second detection result that is different from the at least one first detection result
- use the at least one first type sensor pairto be different from the at least one first detection result
- At least one second test resultis verified, and at least one verification result is obtained;
- the electronic deviceBased on the at least one first detection result, the at least one second detection result, and the at least one verification result, the electronic device is controlled to move.
- the processor 902is further configured to:
- the electronic deviceis controlled to rotate in place; the first strategy is determined based on a first ground detection position; the first ground detection position is based on a different one from the at least one first detection result The second test result is confirmed;
- one of the at least one first type sensoris used to perform ground detection on the first ground detection position, so as to compare with the at least one first type sensor.
- a second test result with a different test resultis verified.
- the processor 902is further configured to:
- the electronic deviceis controlled to rotate in place; the second strategy is determined based on at least two second ground detection positions; the at least two second ground detection positions are determined based on the relationship with the at least one first At least two second test results with different test results are confirmed;
- one of the at least one first-type sensoris used to perform ground detection on the at least two second ground detection positions, so as to compare with the at least one first-type sensor. At least two second test results with different first test results are verified.
- the processor 902is further configured to:
- the electronic deviceis controlled to move.
- the second judgment resultrepresents that each of the at least one updated second detection result is the same as the at least one first detection result; the processor 902, Also configured as:
- the electronic deviceis controlled to move forward. Two distance.
- the second judgment resultindicates that there is at least one updated second detection result that is different from the at least one first detection result; the processor 902 is further configured to:
- the electronic deviceis controlled to advance a third distance.
- the second judgment resultrepresents that each updated second detection result in at least one updated second detection result is the same as the at least one first detection result; the processor 902, Also configured as:
- the electronic The devicerotates in place; the third strategy is determined according to the relative positions of the at least one first-type sensor and the at least one second-type sensor on the electronic device;
- the electronic deviceis controlled to advance a fourth distance.
- bus system 904.the various components in the control device 900 are coupled together through the bus system 904. It can be understood that the bus system 904 is configured to implement connection and communication between these components. In addition to the data bus, the bus system 904 also includes a power bus, a control bus, and a status signal bus. However, for the sake of clear description, various buses are marked as the bus system 904 in FIG. 9.
- the memory 903 in the embodiment of the present applicationis configured to store various types of data to support the operation of the control device 900. Examples of these data include: any computer program used to operate on the control device 900.
- the methods disclosed in the foregoing embodiments of the present applicationmay be applied to the processor 902 or implemented by the processor 902.
- the processor 902may be an integrated circuit chip with signal processing capabilities. In the implementation process, the steps of the foregoing method may be completed by an integrated logic circuit of hardware in the processor 902 or instructions in the form of software.
- the aforementioned processor 902may be a general-purpose processor, a digital signal processor (DSP, Digital Signal Processor), or other programmable logic devices, discrete gates or transistor logic devices, discrete hardware components, and the like.
- DSPDigital Signal Processor
- the processor 902may implement or execute the methods, steps, and logical block diagrams disclosed in the embodiments of the present application.
- the general-purpose processormay be a microprocessor or any conventional processor or the like.
- the steps of the method disclosed in the embodiments of the present applicationmay be directly embodied as being executed and completed by a hardware decoding processor, or executed and completed by a combination of hardware and software modules in the decoding processor.
- the software modulemay be located in a storage medium, and the storage medium is located in the memory 903.
- the processor 902reads the information in the memory 903, and completes the steps of the foregoing method in combination with its hardware.
- control device 900may be implemented by one or more Application Specific Integrated Circuits (ASIC, Application Specific Integrated Circuit), DSP, Programmable Logic Device (PLD, Programmable Logic Device), and Complex Programmable Logic Device (CPLD). , Complex Programmable Logic Device, Field-Programmable Gate Array (FPGA, Field-Programmable Gate Array), general-purpose processor, controller, microcontroller (MCU, Micro Controller Unit), microprocessor (Microprocessor), or other electronics Component implementation, used to perform the aforementioned method.
- ASICApplication Specific Integrated Circuit
- DSPProgrammable Logic Device
- PLDProgrammable Logic Device
- CPLDComplex Programmable Logic Device
- FPGAField-Programmable Gate Array
- MCUMicro Controller Unit
- microprocessorMicroprocessor
- the memory 903 in the embodiment of the present applicationmay be a volatile memory or a non-volatile memory, and may also include both volatile and non-volatile memory.
- the non-volatile memorycan be a read-only memory (ROM, Read Only Memory), a programmable read-only memory (PROM, Programmable Read-Only Memory), an erasable programmable read-only memory (EPROM, Erasable Programmable Read- Only Memory, Electrically Erasable Programmable Read-Only Memory (EEPROM), Ferromagnetic Random Access Memory (FRAM), Flash Memory, Magnetic Surface Memory , CD-ROM, or CD-ROM (Compact Disc Read-Only Memory); magnetic surface memory can be magnetic disk storage or tape storage.
- the volatile memorymay be a random access memory (RAM, Random Access Memory), which is used as an external cache.
- RAMrandom access memory
- SRAMstatic random access memory
- SSRAMsynchronous static random access memory
- Synchronous Static Random Access MemorySynchronous Static Random Access Memory
- DRAMDynamic Random Access Memory
- SDRAMSynchronous Dynamic Random Access Memory
- DDRSDRAMDouble Data Rate Synchronous Dynamic Random Access Memory
- ESDRAMEnhanced Synchronous Dynamic Random Access Memory
- SLDRAMsynchronous connection dynamic random access memory
- DRRAMDirect Rambus Random Access Memory
- the memories described in the embodiments of the present applicationare intended to include, but are not limited to, these and any other suitable types of memories.
- the embodiment of the present applicationalso provides a storage medium, namely a computer storage medium, specifically a computer-readable storage medium, such as a memory 903 storing a computer program, which can be processed by the control device 900 Executed by the device 902 to complete the steps described in the foregoing method.
- the computer-readable storage mediummay be a memory such as FRAM, ROM, PROM, EPROM, EEPROM, Flash Memory, magnetic surface memory, optical disk, or CD-ROM.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Testing Or Calibration Of Command Recording Devices (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Description
Translated fromChinese相关申请的交叉引用Cross-references to related applications
本申请基于申请号为202010201394.2、申请日为2020年03月20日的中国专利申请提出,并要求该中国专利申请的优先权,该中国专利申请的全部内容在此引入本申请作为参考。This application is filed based on a Chinese patent application with an application number of 202010201394.2 and an application date of March 20, 2020, and claims the priority of the Chinese patent application. The entire content of the Chinese patent application is hereby incorporated by reference into this application.
本申请涉及机器人技术,尤其涉及一种控制方法、装置和存储介质。This application relates to robotics, and in particular to a control method, device and storage medium.
下视检测功能是移动机器人的基本功能,具备下视检测功能的机器人能够检测自身与地面的距离是否大于悬崖跌落距离,并基于检测结果移动,以此来避免机器人跌落损坏。The downward-looking detection function is the basic function of a mobile robot. The robot with the downward-looking detection function can detect whether the distance between itself and the ground is greater than the distance of falling from the cliff, and move based on the detection result to avoid falling damage to the robot.
然而,相关技术中,机器人的下视检测功能尚需优化。However, in related technologies, the down-view detection function of the robot still needs to be optimized.
发明内容Summary of the invention
为解决相关技术问题,本申请实施例提供一种控制方法、装置以及存储介质。To solve related technical problems, embodiments of the present application provide a control method, device, and storage medium.
本申请实施例的技术方案是这样实现的:The technical solutions of the embodiments of the present application are implemented as follows:
本申请实施例提供了一种控制方法,包括:The embodiment of the present application provides a control method, including:
获取电子设备上的至少一个第一类传感器的地面检测结果,得到至少一个第一检测结果;并获取所述电子设备上的至少一个第二类传感器的地面检测结果,得到至少一个第二检测结果;所述第一类传感器的检测精度大于所述第二类传感器的检测精度;所述检测结果表征相应传感器与自身对应的地面检测位置的距离是否大于第一距离;Obtain the ground detection result of at least one first type sensor on the electronic device to obtain at least one first detection result; and obtain the ground detection result of at least one second type sensor on the electronic device to obtain at least one second detection result The detection accuracy of the first type sensor is greater than the detection accuracy of the second type sensor; the detection result indicates whether the distance between the corresponding sensor and its corresponding ground detection position is greater than the first distance;
判断得到的至少一个第二检测结果中的每个第二检测结果是否与得到的至少一个第一检测结果相同,得到第一判断结果;Judging whether each second detection result in the obtained at least one second detection result is the same as the obtained at least one first detection result, and obtaining the first judgment result;
在所述第一判断结果表征存在至少一个第二检测结果与所述至少一个第一检测结果不同的情况下,利用所述至少一个第一类传感器对与所述至少一个第一检测结果不同的至少一个第二检测结果进行验证,得到至少一个验证结果;In the case where the first judgment result indicates that there is at least one second detection result that is different from the at least one first detection result, use the at least one first type sensor pair to be different from the at least one first detection result At least one second test result is verified, and at least one verification result is obtained;
基于所述至少一个第一检测结果、所述至少一个第二检测结果以及所 述至少一个验证结果,控制所述电子设备移动。Based on the at least one first detection result, the at least one second detection result, and the at least one verification result, the electronic device is controlled to move.
上述方案中,所述第一判断结果表征存在一个第二检测结果与所述至少一个第一检测结果不同;利用所述至少一个第一类传感器对与所述至少一个第一检测结果不同的一个第二检测结果进行验证,包括:In the above solution, the first judgment result indicates that there is a second detection result that is different from the at least one first detection result; using the at least one first-type sensor pair to be different from the at least one first detection result The second test result is verified, including:
基于第一策略,控制所述电子设备原地旋转;所述第一策略是根据第一地面检测位置确定的;所述第一地面检测位置是根据与所述至少一个第一检测结果不同的一个第二检测结果确定的;Based on the first strategy, the electronic device is controlled to rotate in place; the first strategy is determined based on a first ground detection position; the first ground detection position is based on a different one from the at least one first detection result The second test result is confirmed;
在控制所述电子设备原地旋转的过程中,利用所述至少一个第一类传感器中的一个第一类传感器对所述第一地面检测位置进行地面检测,以对与所述至少一个第一检测结果不同的一个第二检测结果进行验证。In the process of controlling the in-situ rotation of the electronic device, one of the at least one first type sensor is used to perform ground detection on the first ground detection position, so as to compare with the at least one first type sensor. A second test result with a different test result is verified.
上述方案中,所述第一判断结果表征存在至少两个第二检测结果与所述至少一个第一检测结果不同;利用所述至少一个第一类传感器对与所述至少一个第一检测结果不同的至少两个第二检测结果进行验证,包括:In the above solution, the first judgment result indicates that there are at least two second detection results that are different from the at least one first detection result; using the at least one first type sensor pair is different from the at least one first detection result At least two of the second test results are verified, including:
基于第二策略,控制所述电子设备原地旋转;所述第二策略是根据至少两个第二地面检测位置确定的;所述至少两个第二地面检测位置是根据与所述至少一个第一检测结果不同的至少两个第二检测结果确定的;Based on the second strategy, the electronic device is controlled to rotate in place; the second strategy is determined based on at least two second ground detection positions; the at least two second ground detection positions are determined based on the relationship with the at least one first At least two second test results with different test results are confirmed;
在控制所述电子设备原地旋转的过程中,利用所述至少一个第一类传感器中的一个第一类传感器对所述至少两个第二地面检测位置进行地面检测,以对与所述至少一个第一检测结果不同的至少两个第二检测结果进行验证。In the process of controlling the in-situ rotation of the electronic device, one of the at least one first-type sensor is used to perform ground detection on the at least two second ground detection positions, so as to compare with the at least one first-type sensor. At least two second test results with different first test results are verified.
上述方案中,所述基于所述至少一个第一检测结果、所述至少一个第二检测结果以及所述至少一个验证结果,控制所述电子设备移动,包括:In the above solution, the controlling the movement of the electronic device based on the at least one first detection result, the at least one second detection result, and the at least one verification result includes:
利用所述至少一个验证结果对所述至少一个第二检测结果进行更新,得到至少一个更新后的第二检测结果;Update the at least one second detection result by using the at least one verification result to obtain at least one updated second detection result;
判断至少一个更新后的第二检测结果中的每个更新后的第二检测结果是否与所述至少一个第一检测结果相同,得到第二判断结果;Judging whether each updated second detection result in the at least one updated second detection result is the same as the at least one first detection result, to obtain a second judgment result;
基于所述第二判断结果,控制所述电子设备移动。Based on the second judgment result, the electronic device is controlled to move.
上述方案中,所述第二判断结果表征至少一个更新后的第二检测结果中的每个更新后的第二检测结果与所述至少一个第一检测结果相同;所述控制所述电子设备移动,包括:In the above solution, the second judgment result represents that each of the at least one updated second detection result is the same as the at least one first detection result; and the control of the electronic device to move ,include:
在所述至少一个更新后的第二检测结果和所述至少一个第一检测结果表征相应传感器与自身对应的地面检测位置的距离小于或等于第一距离的情况下,控制所述电子设备前进第二距离。In the case that the at least one updated second detection result and the at least one first detection result indicate that the distance between the corresponding sensor and its corresponding ground detection position is less than or equal to the first distance, the electronic device is controlled to move forward. Two distance.
上述方案中,所述第二判断结果表征存在至少一个更新后的第二检测结果与所述至少一个第一检测结果不同;所述控制所述电子设备移动,包括:In the above solution, the second judgment result indicates that there is at least one updated second detection result that is different from the at least one first detection result; the controlling the movement of the electronic device includes:
基于所述至少一个更新后的第二检测结果和所述至少一个第一检测结果,确定第一方向;Determining the first direction based on the at least one updated second detection result and the at least one first detection result;
基于确定的第一方向,控制所述电子设备前进第三距离。Based on the determined first direction, the electronic device is controlled to advance a third distance.
上述方案中,所述第二判断结果表征至少一个更新后的第二检测结果中的每个更新后的第二检测结果与所述至少一个第一检测结果相同;所述控制所述电子设备移动,包括:In the above solution, the second judgment result represents that each of the at least one updated second detection result is the same as the at least one first detection result; and the control of the electronic device to move ,include:
在所述至少一个更新后的第二检测结果和所述至少一个第一检测结果表征相应传感器与自身对应的地面检测位置的距离大于第一距离的情况下,基于第三策略,控制所述电子设备原地旋转;所述第三策略是根据所述至少一个第一类传感器和所述至少一个第二类传感器在所述电子设备上的相对位置确定的;In the case that the at least one updated second detection result and the at least one first detection result indicate that the distance between the corresponding sensor and its corresponding ground detection position is greater than the first distance, based on the third strategy, control the electronic The device rotates in place; the third strategy is determined according to the relative positions of the at least one first-type sensor and the at least one second-type sensor on the electronic device;
在控制所述电子设备原地旋转的过程中,获取所述至少一个第一类传感器的地面检测结果,得到至少一个第三检测结果;In the process of controlling the in-situ rotation of the electronic device, obtaining a ground detection result of the at least one first-type sensor to obtain at least one third detection result;
基于得到的至少一个第三检测结果,确定第二方向;Determine the second direction based on the obtained at least one third detection result;
基于确定的第二方向,控制所述电子设备前进第四距离。Based on the determined second direction, the electronic device is controlled to advance a fourth distance.
本申请实施例还提供了一种控制装置,包括:The embodiment of the present application also provides a control device, including:
获取单元,配置为获取电子设备上的至少一个第一类传感器的地面检测结果,得到至少一个第一检测结果;并获取所述电子设备上的至少一个第二类传感器的地面检测结果,得到至少一个第二检测结果;所述第一类传感器的检测精度大于所述第二类传感器的检测精度;所述检测结果表征相应传感器与自身对应的地面检测位置的距离是否大于第一距离;The obtaining unit is configured to obtain the ground detection result of at least one first type sensor on the electronic device to obtain at least one first detection result; and obtain the ground detection result of at least one second type sensor on the electronic device to obtain at least A second detection result; the detection accuracy of the first type sensor is greater than the detection accuracy of the second type sensor; the detection result indicates whether the distance between the corresponding sensor and its corresponding ground detection position is greater than the first distance;
第一处理单元,配置为判断得到的至少一个第二检测结果中的每个第二检测结果是否与得到的至少一个第一检测结果相同,得到第一判断结果;The first processing unit is configured to determine whether each second detection result in the obtained at least one second detection result is the same as the obtained at least one first detection result, to obtain the first judgment result;
第二处理单元,配置为在所述第一判断结果表征存在至少一个第二检测结果与所述至少一个第一检测结果不同的情况下,利用所述至少一个第一类传感器对与所述至少一个第一检测结果不同的至少一个第二检测结果进行验证,得到至少一个验证结果;The second processing unit is configured to use the at least one first-type sensor pair and the at least one first detection result when the first judgment result indicates that there is at least one second detection result that is different from the at least one first detection result. Verifying at least one second detection result that is different from the first detection result to obtain at least one verification result;
第三处理单元,配置为基于所述至少一个第一检测结果、所述至少一个第二检测结果以及所述至少一个验证结果,控制所述电子设备移动。The third processing unit is configured to control the movement of the electronic device based on the at least one first detection result, the at least one second detection result, and the at least one verification result.
本申请实施例还提供了一种控制装置,包括:处理器和配置为存储能够在处理器上运行的计算机程序的存储器;An embodiment of the present application also provides a control device, including: a processor and a memory configured to store a computer program that can run on the processor;
其中,所述处理器配置为运行所述计算机程序时,执行上述任一方法的步骤。Wherein, the processor is configured to execute the steps of any of the foregoing methods when running the computer program.
本申请实施例还提供了一种存储介质,所述介质存储有计算机程序,所述计算机程序被处理器执行时实现上述任一方法的步骤。The embodiment of the present application also provides a storage medium, the medium stores a computer program, and the computer program implements the steps of any of the foregoing methods when the computer program is executed by a processor.
本申请实施例提供的控制方法、装置以及存储介质,获取电子设备上的至少一个第一类传感器的地面检测结果,得到至少一个第一检测结果;并获取所述电子设备上的至少一个第二类传感器的地面检测结果,得到至少一个第二检测结果;所述第一类传感器的检测精度大于所述第二类传感器的检测精度;所述检测结果表征相应传感器与自身对应的地面检测位置 的距离是否大于第一距离;判断得到的至少一个第二检测结果中的每个第二检测结果是否与得到的至少一个第一检测结果相同,得到第一判断结果;在所述第一判断结果表征存在至少一个第二检测结果与所述至少一个第一检测结果不同的情况下,利用所述至少一个第一类传感器对与所述至少一个第一检测结果不同的至少一个第二检测结果进行验证,得到至少一个验证结果;基于所述至少一个第一检测结果、所述至少一个第二检测结果以及所述至少一个验证结果,控制所述电子设备移动。本申请实施例的方案,为电子设备设置多级精度的下视传感器,即为电子设备设置至少一个高精度的第一类传感器和至少一个低精度的第二类传感器,在获得各传感器的地面检测结果后,判断第二类传感器的地面检测结果是否与第一类传感器的地面检测结果相同,若不同,利用第一类传感器验证第二类传感器的地面检测结果,并基于各传感器的地面检测结果以及第一类传感器的验证结果控制电子设备移动;如此,能够提高电子设备下视检测的准确性,进而提升用户体验。The control method, device, and storage medium provided by the embodiments of the present application obtain the ground detection result of at least one first-type sensor on an electronic device to obtain at least one first detection result; and obtain at least one second detection result on the electronic device. At least one second detection result is obtained from the ground detection result of the type sensor; the detection accuracy of the first type sensor is greater than the detection accuracy of the second type sensor; the detection result represents the difference between the corresponding sensor and its corresponding ground detection position Whether the distance is greater than the first distance; whether each second detection result in the at least one second detection result obtained by judging is the same as the at least one first detection result obtained, and the first judgment result is obtained; and the first judgment result represents When there is at least one second detection result that is different from the at least one first detection result, the at least one first type sensor is used to verify at least one second detection result that is different from the at least one first detection result , Obtaining at least one verification result; based on the at least one first detection result, the at least one second detection result, and the at least one verification result, controlling the movement of the electronic device. In the solution of the embodiment of the present application, a multi-level precision downward-looking sensor is provided for the electronic device, that is, at least one high-precision first-type sensor and at least one low-precision second-type sensor are provided for the electronic device, and the ground of each sensor is obtained. After the detection result, judge whether the ground detection result of the second type of sensor is the same as the ground detection result of the first type of sensor, if it is different, use the first type of sensor to verify the ground detection result of the second type of sensor, and based on the ground detection of each sensor The result and the verification result of the first-type sensor control the movement of the electronic device; in this way, the accuracy of the down-view detection of the electronic device can be improved, thereby enhancing the user experience.
图1为本申请实施例控制方法的流程示意图;FIG. 1 is a schematic flowchart of a control method according to an embodiment of the application;
图2为本申请实施例传感器在扫地机的设置位置示意图一;2 is a schematic diagram 1 of the location of the sensor in the sweeper according to the embodiment of the application;
图3为本申请实施例传感器在扫地机的设置位置示意图二;FIG. 3 is a schematic diagram 2 of the installation position of the sensor in the sweeper according to the embodiment of the application;
图4为本申请实施例扫地机应用场景示意图;FIG. 4 is a schematic diagram of an application scenario of a sweeper according to an embodiment of the application;
图5为本申请实施例扫地机原地旋转示意图;Fig. 5 is a schematic diagram of in-situ rotation of the sweeper according to the embodiment of the application;
图6为本申请应用实施例扫地机示意图;Fig. 6 is a schematic diagram of a sweeper according to an application embodiment of the application;
图7为本申请应用实施例扫地机应用场景示意图;FIG. 7 is a schematic diagram of an application scenario of a sweeper according to an application embodiment of this application;
图8为本申请实施例控制装置的结构示意图;FIG. 8 is a schematic structural diagram of a control device according to an embodiment of the application;
图9为本申请实施例控制装置的硬件结构示意图。FIG. 9 is a schematic diagram of the hardware structure of the control device according to an embodiment of the application.
以下结合说明书附图及实施例对本申请的技术方案作进一步详细的阐述。The technical solution of the present application will be further elaborated below in conjunction with the drawings and embodiments of the specification.
相关技术中,通常采用为移动机器人安装下视传感器的方式来配置机器人的下视检测功能;具体地,在机器人底部安装下视传感器,当机器人移动时,通过下视传感器检测机器人底部的离地距离,判断离地面的距离是否大于预设的悬崖跌落距离;如果离地面的距离小于或等于预设的悬崖跌落距离,可以控制机器人正常前进;如果离地面的距离大于预设的悬崖跌落距离,则需要控制机器人后退,避免机器人跌落损坏。这里,下视传感器可以是接近传感器或测距传感器;接近传感器的检测精度较低,价格低廉,包括红外接近传感器、激光接近传感器等;测距传感器的检测精度 较高,价格昂贵,包括红外测距传感器、激光测距传感器、超声波距离传感器等。实际应用时,为了检测不同方向的悬崖,机器人底部通常需要安装至少两个下视传感器,并且,安装的至少两个下视传感器通常为同款的下视传感器,这使得机器人的下视检测功能存在以下缺陷:In related technologies, the downward-looking sensor is usually installed for the mobile robot to configure the downward-looking detection function of the robot; specifically, the downward-looking sensor is installed on the bottom of the robot, and when the robot moves, the bottom-looking sensor detects the ground clearance of the robot. Distance to judge whether the distance from the ground is greater than the preset cliff drop distance; if the distance from the ground is less than or equal to the preset cliff drop distance, the robot can be controlled to move forward normally; if the distance from the ground is greater than the preset cliff drop distance, It is necessary to control the robot to retreat to avoid falling damage to the robot. Here, the downward looking sensor can be a proximity sensor or a ranging sensor; the detection accuracy of the proximity sensor is low, and the price is low, including infrared proximity sensors, laser proximity sensors, etc.; the detection accuracy of the ranging sensor is high, and the price is expensive, including infrared measurement. Distance sensor, laser distance sensor, ultrasonic distance sensor, etc. In practical applications, in order to detect cliffs in different directions, at least two downward-looking sensors are usually installed at the bottom of the robot, and the installed at least two downward-looking sensors are usually the same type of downward-looking sensors, which makes the robot's downward-looking detection function There are the following shortcomings:
第一,如果机器人安装的至少两个下视传感器均为接近传感器,会使得机器人下视检测的准确性较低;以红外接近传感器为例,由于红外信号的反射强度会受反射物颜色影响,当机器人移动到深色地面(例如黑色地毯)时,地面会大量吸收红外接近传感器的发射光(即红外信号),导致地面反射的光量较少,红外接近传感器将地面误判为悬崖,进而使得机器人无法在深色地面上移动;而在强日光环境下,红外接近传感器也易受强光干扰,容易将正常地面误判为悬崖。First, if at least two of the downward-looking sensors installed in the robot are proximity sensors, the accuracy of the downward-looking detection of the robot will be low; taking the infrared proximity sensor as an example, since the reflection intensity of the infrared signal will be affected by the color of the reflector, When the robot moves to a dark ground (such as a black carpet), the ground will absorb a large amount of the emitted light (ie infrared signal) from the infrared proximity sensor, resulting in a small amount of light reflected on the ground. The infrared proximity sensor will misjudge the ground as a cliff. The robot cannot move on the dark ground; and in a strong daylight environment, the infrared proximity sensor is also susceptible to strong light interference, and it is easy to misjudge the normal ground as a cliff.
第二,如果机器人安装的至少两个下视传感器均为测距传感器,会使得机器人的成本过高。Second, if at least two of the downward-looking sensors installed by the robot are distance measuring sensors, the cost of the robot will be too high.
基于此,在本申请的各种实施例中,为电子设备(即机器人)设置多级精度的下视传感器,即为电子设备设置至少一个高精度的第一类传感器(即测距传感器)和至少一个低精度的第二类传感器(即接近传感器),在获得各传感器的地面检测结果后,判断第二类传感器的地面检测结果是否与第一类传感器的地面检测结果相同,若不同,利用第一类传感器验证第二类传感器的地面检测结果,并基于各传感器的地面检测结果以及第一类传感器的验证结果控制电子设备移动;这样,由于第一类传感器的检测精度大于第二类传感器的检测精度,但第二类传感器的价格低于第一类传感器的价格;因此,采用本申请实施例的方案,能够在控制电子设备的成本的前提下,提高电子设备下视检测的准确性,为电子设备配置低成本、高精度的下视检测功能,提升用户体验。Based on this, in various embodiments of the present application, the electronic device (i.e. robot) is provided with a multi-level precision downward-looking sensor, that is, the electronic device is provided with at least one high-precision first-type sensor (i.e., ranging sensor) and At least one low-precision type 2 sensor (ie proximity sensor), after obtaining the ground detection result of each sensor, determine whether the ground detection result of the second type sensor is the same as the ground detection result of the first type sensor. If it is different, use The first type of sensor verifies the ground detection results of the second type of sensor, and controls the movement of the electronic device based on the ground detection results of each sensor and the verification result of the first type of sensor; in this way, the detection accuracy of the first type of sensor is greater than that of the second type of sensor However, the price of the second type of sensor is lower than that of the first type of sensor; therefore, the solution of the embodiment of this application can improve the accuracy of the down-view detection of the electronic device under the premise of controlling the cost of the electronic device , Configure low-cost, high-precision down-view detection functions for electronic devices to improve user experience.
本申请实施例提供了一种控制方法,如图1所示,所述方法包括以下步骤:The embodiment of the present application provides a control method. As shown in FIG. 1, the method includes the following steps:
步骤101:获取电子设备上的至少一个第一类传感器的地面检测结果,得到至少一个第一检测结果;并获取所述电子设备上的至少一个第二类传感器的地面检测结果,得到至少一个第二检测结果;Step 101: Obtain the ground detection result of at least one first-type sensor on an electronic device to obtain at least one first detection result; and obtain the ground detection result of at least one second-type sensor on the electronic device to obtain at least one first detection result. 2. Test results;
这里,所述第一类传感器的检测精度大于所述第二类传感器的检测精度;所述检测结果表征相应传感器与自身对应的地面检测位置的距离是否大于第一距离;Here, the detection accuracy of the first type sensor is greater than the detection accuracy of the second type sensor; the detection result indicates whether the distance between the corresponding sensor and its corresponding ground detection position is greater than the first distance;
步骤102:判断得到的至少一个第二检测结果中的每个第二检测结果是否与得到的至少一个第一检测结果相同,得到第一判断结果;Step 102: Determine whether each second detection result in the obtained at least one second detection result is the same as the obtained at least one first detection result, and obtain a first judgment result;
步骤103:在所述第一判断结果表征存在至少一个第二检测结果与所述至少一个第一检测结果不同的情况下,利用所述至少一个第一类传感器对与所述至少一个第一检测结果不同的至少一个第二检测结果进行验证,得到至少一个验证结果;Step 103: When the first judgment result indicates that there is at least one second detection result that is different from the at least one first detection result, use the at least one first-type sensor pair to compare with the at least one first detection result. At least one second test result with different results is verified, and at least one verification result is obtained;
步骤104:基于所述至少一个第一检测结果、所述至少一个第二检测结果以及所述至少一个验证结果,控制所述电子设备移动。Step 104: Control the movement of the electronic device based on the at least one first detection result, the at least one second detection result, and the at least one verification result.
在步骤101中,实际应用时,所述电子设备可以是扫地机、平衡车等移动机器人;所述第一类传感器和所述第二类传感器可以是下视传感器;所述第一类传感器可以是测距传感器,例如红外测距传感器、激光测距传感器、超声波距离传感器等;所述第二类传感器可以是接近传感器,例如红外接近传感器、激光接近传感器等。In
实际应用时,所述第一类传感器的个数、所述第二类传感器的个数以及各传感器在所述电子设备上的设置位置可以由研发人员根据设计需求确定。比如,可以在扫地机上设置一个第一类传感器和一个第二类传感器,两个传感器在扫地机上的设置位置可以如图2所示,两个传感器可以分别设置在扫地机的两侧,例如在扫地机201的底部,传感器2011可以是第一类传感器,同时,传感器2012为第二类传感器;当然,传感器2011也可以是第二类传感器,同时,传感器2012为第一类传感器;或者,两个传感器可以设置在扫地机的同一侧,例如在扫地机202的底部,传感器2021可以是第一类传感器,同时,传感器2022为第二类传感器;当然,传感器2021也可以是第二类传感器,同时,传感器2022为第一类传感器。再比如,可以在扫地机上设置至少三个传感器,例如三个传感器、四个传感器、五个传感器或六个传感器(研发人员也可以根据设计需求设置七个以上传感器);所述至少三个传感器中的至少一个传感器为第一类传感器,同时,所述至少三个传感器中的第一类传感器的个数小于3。三个传感器、四个传感器、五个传感器和六个传感器在扫地机上的设置位置可以如图3所示,多个传感器可以基于扫地机的一条中心轴对称设置,例如在扫地机301的底部,可以安装四个传感器:传感器3011、传感器3012、传感器3013和传感器3014,四个传感器中任意的至少一个传感器可以是第一类传感器,同时,四个传感器中的第一类传感器的个数小于4;或者,例如在扫地机302的底部,可以安装六个传感器:传感器3021、传感器3022、传感器3023、传感器3024、传感器3025和传感器3026,六个传感器中任意的至少一个传感器可以是第一类传感器,同时,六个传感器中的第一类传感器的个数小于6。当然,多个传感器也可以非对称设置,例如在扫地机303的底部,可以安装三个传感器:传感器3031、传感器3032和传感器3033,三个传感器中任意的至少一个传感器可以是第一类传感器,同时,三个传感器中的第一类传感器的个数小于3;或者,例如在扫地机304的底部,可以安装五个传感器:传感器3041、传感器3042、传感器3043、传感器3044和传感器3045,五个传感器中任意的至少一个传感器可以是第一类传感器,同时,五个传感器中的第一类传感器的个数小于5。In practical applications, the number of sensors of the first type, the number of sensors of the second type, and the location of each sensor on the electronic device can be determined by the research and development personnel according to design requirements. For example, a first type sensor and a second type sensor can be set on the sweeper. The positions of the two sensors on the sweeper can be as shown in Figure 2. The two sensors can be set on both sides of the sweeper, for example, At the bottom of the
实际应用时,所述第一距离即上述预设的悬崖跌落距离;所述第一距离也可以由研发人员根据设计需求确定。在传感器与自身对应的地面检测 位置的距离大于第一距离的情况下,相应检测结果可以为“悬崖”;在传感器与自身对应的地面检测位置的距离小于或等于第一距离的情况下,相应检测结果可以为“非悬崖”。当然,所述检测结果的表现形式也可以由研发人员根据设计需求确定;比如,在传感器与自身对应的地面检测位置的距离大于第一距离的情况下,相应检测结果还可以为“1”;在传感器与自身对应的地面检测位置的距离小于或等于第一距离的情况下,相应检测结果可以为“0”。In practical applications, the first distance is the above-mentioned preset falling distance from the cliff; the first distance may also be determined by the research and development personnel according to design requirements. In the case where the distance between the sensor and its corresponding ground detection position is greater than the first distance, the corresponding detection result may be "cliff"; in the case where the distance between the sensor and its corresponding ground detection position is less than or equal to the first distance, the corresponding detection result The detection result can be "non-cliff". Of course, the expression form of the detection result can also be determined by the research and development personnel according to design requirements; for example, in the case where the distance between the sensor and its corresponding ground detection position is greater than the first distance, the corresponding detection result can also be "1"; In the case where the distance between the sensor and its corresponding ground detection position is less than or equal to the first distance, the corresponding detection result may be "0".
在步骤102中,实际应用时,由于在大部分机器人移动的过程中,机器人处于前进状态的概率远远大于机器人处于后退状态的概率;以扫地机为例,扫地机移动时,可能80%的概率处于前进状态,20%的概率处于后退状态;因此,为了提升电子设备下视检测的效率,可以将所述至少一个第一类传感器设置在所述电子设备底部的前进侧;所述电子设备底部的前进侧为控制所述电子设备前进时所述电子设备的底部朝前的那一侧(所述电子设备底部的前进侧的具体范围可以由研发人员根据设计需求确定)。同时,所述至少一个第一类传感器中的每个第一类传感器的第一检测结果相同。In
实际应用时,在所述第一判断结果表征得到的至少一个第二检测结果中的每个第二检测结果均与得到的至少一个第一检测结果相同的情况下,当所述至少一个第二检测结果和所述至少一个第一检测结果表征相应传感器与自身对应的地面检测位置的距离小于或等于第一距离(例如所有的检测结果均为“非悬崖”)时,可以控制所述电子设备前进预设距离;所述预设距离可以由研发人员根据设计需求确定,比如,研发人员可以根据所述电子设备底部的前进侧设置的各传感器与所述电子设备的驱动部件(例如辅助轮)的相对位置确定所述预设距离。而当所述至少一个第二检测结果和所述至少一个第一检测结果表征相应传感器与自身对应的地面检测位置的距离大于第一距离(例如所有的检测结果均为“悬崖”)时,可以根据所述电子设备上的各传感器的相对位置,确定旋转策略,所述旋转策略可以包含所述电子设备原地旋转的多个角度、原地旋转的方向、原地旋转的次数、每次旋转相应角度后的停顿时间以及是否在停止旋转时复位所述电子设备(即控制所述电子设备转回开始原地旋转前的状态)的信息;并控制所述电子设备基于确定的旋转策略原地旋转,在原地旋转的过程中,利用至少一个第一类传感器进行下视检测,根据下视检测的结果确定前进方向,并根据确定的前进方向控制所述电子设备前进预设距离。In actual application, when each of the second detection results in the at least one second detection result characterized by the first judgment result is the same as the obtained at least one first detection result, when the at least one second detection result The detection result and the at least one first detection result indicate that when the distance between the corresponding sensor and its corresponding ground detection position is less than or equal to the first distance (for example, all detection results are "non-cliff"), the electronic device can be controlled Advance a preset distance; the preset distance can be determined by the research and development personnel according to design requirements, for example, the research and development personnel can be based on the sensors provided on the forward side of the bottom of the electronic device and the drive components of the electronic device (for example, auxiliary wheels) The relative position of the determines the preset distance. And when the at least one second detection result and the at least one first detection result indicate that the distance between the corresponding sensor and its corresponding ground detection position is greater than the first distance (for example, all the detection results are "cliffs"), Determine the rotation strategy according to the relative positions of the sensors on the electronic device. The rotation strategy may include multiple angles of the electronic device's in-situ rotation, the direction of in-situ rotation, the number of in-situ rotations, and each rotation. Information about the pause time after the corresponding angle and whether the electronic device is reset when the rotation is stopped (that is, the electronic device is controlled to return to the state before it started to rotate in place); and the electronic device is controlled to be in place based on the determined rotation strategy Rotation, in the process of rotating in situ, using at least one first-type sensor to perform downward-looking detection, determine the forward direction according to the result of downward-looking detection, and control the electronic device to advance a preset distance according to the determined forward direction.
在步骤103中,实际应用时,由于在所述第一判断结果表征存在至少一个第二检测结果与所述至少一个第一检测结果不同的情况下,需要利用所述至少一个第一类传感器对与所述至少一个第一检测结果不同的至少一个第二检测结果进行验证;因此,为了进一步提升电子设备下视检测的效率,可以增加第一类传感器的个数,即在所述电子设备上设置至少两个第 一类传感器;如此,在电子设备的传感器总数固定的情况下,增加第一类传感器的个数,会使得第二类传感器的个数减少,在利用所述至少一个第一类传感器对与所述至少一个第一检测结果不同的至少一个第二检测结果进行验证时,验证次数也减少,进而提升了电子设备下视检测的效率。In
实际应用时,利用所述至少一个第一类传感器对与所述至少一个第一检测结果不同的至少一个第二检测结果进行验证的过程中,可能仅需对一个第二检测结果进行验证,即得到的至少一个第二检测结果中可能存在一个第二检测结果与所述至少一个第一检测结果不同。In practical applications, in the process of verifying at least one second detection result that is different from the at least one first detection result by using the at least one first type sensor, only one second detection result may need to be verified, that is, Among the obtained at least one second detection result, there may be a second detection result that is different from the at least one first detection result.
基于此,在一实施例中,所述第一判断结果表征存在一个第二检测结果与所述至少一个第一检测结果不同;利用所述至少一个第一类传感器对与所述至少一个第一检测结果不同的一个第二检测结果进行验证,可以包括:Based on this, in an embodiment, the first judgment result indicates that there is a second detection result that is different from the at least one first detection result; using the at least one first type sensor pair and the at least one first detection result The verification of a second test result with different test results may include:
基于第一策略,控制所述电子设备原地旋转;所述第一策略是根据第一地面检测位置确定的;所述第一地面检测位置是根据与所述至少一个第一检测结果不同的一个第二检测结果确定的;Based on the first strategy, the electronic device is controlled to rotate in place; the first strategy is determined based on a first ground detection position; the first ground detection position is based on a different one from the at least one first detection result The second test result is confirmed;
在控制所述电子设备原地旋转的过程中,利用所述至少一个第一类传感器中的一个第一类传感器对所述第一地面检测位置进行地面检测,以对与所述至少一个第一检测结果不同的一个第二检测结果进行验证。In the process of controlling the in-situ rotation of the electronic device, one of the at least one first type sensor is used to perform ground detection on the first ground detection position, so as to compare with the at least one first type sensor. A second test result with a different test result is verified.
具体地,所述第一判断结果表征存在一个第二检测结果与所述至少一个第一检测结果不同时,可以确定与所述至少一个第一检测结果不同的一个第二检测结果对应的一个第二类传感器,再将确定的一个第二类传感器对应的地面检测位置确定为第一地面检测位置;同时,将所述至少一个第一类传感器中的一个第一类传感器确定为验证传感器(这里,可以由研发人员根据设计需求将所述至少一个第一类传感器中的任一第一类传感器确定为验证传感器,也可以将所述至少一个第一类传感器中与所述第一地面检测位置的距离最小的第一类传感器确定为验证传感器);根据确定的第一地面检测位置与验证传感器在所述电子设备上的设置位置,确定第一策略;所述第一策略可以包含所述电子设备原地旋转的角度(例如15°)、原地旋转的方向(例如顺时针或逆时针)、旋转相应角度后的停顿时间(例如0.1s)以及是否在停止旋转时复位所述电子设备(即控制所述电子设备转回开始原地旋转前的状态)的信息;控制所述电子设备基于第一策略包含的方向原地旋转第一策略包含的角度后,验证传感器对应的地面检测位置为所述第一地面检测位置;在第一策略包含的停顿时间内,利用验证传感器对所述第一地面检测位置进行地面检测,得到一个第三检测结果;此时,可以直接将得到的一个第三检测结果确定为一个验证结果,也可以判断与所述至少一个第一检测结果不同的一个第二检测结果是否和得到的一个第三检测结果相同;若相同,确定验证结果为“正确”;若不同,确定验证结果为“错误”;如果所述第一策略包含在停止旋转时复位所述电子设备的信息, 在验证完毕(即完成与所述至少一个第一检测结果不同的一个第二检测结果的验证)的情况下,复位所述电子设备。Specifically, when the first judgment result indicates that there is a second detection result that is different from the at least one first detection result, a first detection result corresponding to a second detection result that is different from the at least one first detection result can be determined. For the second type sensor, the determined ground detection position corresponding to the second type sensor is determined as the first ground detection position; at the same time, one of the at least one first type sensor is determined as the verification sensor (here , The R&D personnel may determine any one of the at least one first type sensor as a verification sensor according to design requirements, or the at least one first type sensor may be compared with the first ground detection position The first type of sensor with the smallest distance is determined to be the verification sensor); the first strategy is determined according to the determined first ground detection position and the setting position of the verification sensor on the electronic device; the first strategy may include the electronic The angle at which the device rotates in place (e.g. 15°), the direction in which it rotates in place (e.g. clockwise or counterclockwise), the pause time after rotating the corresponding angle (e.g. 0.1s), and whether to reset the electronic device when it stops rotating ( That is, control the electronic device to turn back to the state before starting to rotate in place); after controlling the electronic device to rotate in place based on the direction included in the first strategy by the angle included in the first strategy, verify that the ground detection position corresponding to the sensor is The first ground detection position; within the pause time included in the first strategy, the verification sensor is used to perform ground detection on the first ground detection position to obtain a third detection result; at this time, the obtained first ground detection position can be directly 3. The detection result is determined to be a verification result, and it can also be determined whether a second detection result that is different from the at least one first detection result is the same as the obtained third detection result; if it is the same, the verification result is determined to be "correct"; If they are different, the verification result is determined to be "error"; if the first strategy includes the information of resetting the electronic device when the rotation is stopped, after verification is completed (that is, a second test result that is different from the at least one first test result is completed) In the case of verification of the detection result), reset the electronic device.
实际应用时,以图4所示的应用场景为例,假设所述电子设备为扫地机,扫地机底部共设置四个下视传感器,其中,传感器401为测距传感器(即第一类传感器),传感器402、传感器403和传感器404为接近传感器(即第二类传感器);在非强光照射的环境下,扫地机向北前进,当扫地机从白色地毯移动至黑色地毯边缘,也就是说,当传感器401和传感器402进入黑色地毯区域时,分别获取四个传感器的地面检测结果;此时,传感器401的地面检测结果为“非悬崖”,传感器402的地面检测结果为“悬崖”,传感器403和传感器404的地面检测结果也为“非悬崖”;可见,传感器402的地面检测结果与传感器401的地面检测结果不同,需要利用传感器401对传感器402的地面检测结果进行验证。如图5所示,控制扫地机顺时针原地旋转,直至传感器401到达传感器402在扫地机旋转前所处的位置,此时,获取传感器401的地面检测结果,得到的地面检测结果为“非悬崖”,即得到的验证结果为“非悬崖”。In actual application, taking the application scenario shown in Figure 4 as an example, suppose that the electronic device is a sweeper, and a total of four downward-looking sensors are provided at the bottom of the sweeper, among which the
实际应用时,利用所述至少一个第一类传感器对与所述至少一个第一检测结果不同的至少一个第二检测结果进行验证的过程中,可能需要对多个第二检测结果进行验证,即得到的至少一个第二检测结果中可能存在多个第二检测结果与所述至少一个第一检测结果不同。In actual application, in the process of verifying at least one second detection result that is different from the at least one first detection result by using the at least one first type sensor, it may be necessary to verify multiple second detection results, that is, There may be multiple second detection results in the obtained at least one second detection result that are different from the at least one first detection result.
基于此,在一实施例中,所述第一判断结果表征存在至少两个第二检测结果与所述至少一个第一检测结果不同;利用所述至少一个第一类传感器对与所述至少一个第一检测结果不同的至少两个第二检测结果进行验证,可以包括:Based on this, in an embodiment, the first judgment result indicates that there are at least two second detection results that are different from the at least one first detection result; using the at least one first type sensor pair and the at least one The verification of at least two second test results with different first test results may include:
基于第二策略,控制所述电子设备原地旋转;所述第二策略是根据至少两个第二地面检测位置确定的;所述至少两个第二地面检测位置是根据与所述至少一个第一检测结果不同的至少两个第二检测结果确定的;Based on the second strategy, the electronic device is controlled to rotate in place; the second strategy is determined based on at least two second ground detection positions; the at least two second ground detection positions are determined based on the relationship with the at least one first At least two second test results with different test results are confirmed;
在控制所述电子设备原地旋转的过程中,利用所述至少一个第一类传感器中的一个第一类传感器对所述至少两个第二地面检测位置进行地面检测,以对与所述至少一个第一检测结果不同的至少两个第二检测结果进行验证。In the process of controlling the in-situ rotation of the electronic device, one of the at least one first-type sensor is used to perform ground detection on the at least two second ground detection positions, so as to compare with the at least one first-type sensor. At least two second test results with different first test results are verified.
具体地,所述第一判断结果表征存在多个第二检测结果(即至少两个第二检测结果)与所述至少一个第一检测结果不同时,可以确定多个第二检测结果中的每个第二检测结果对应的第二类传感器,即确定多个第二类传感器,再将确定的多个第二类传感器中的每个第二类传感器对应的地面检测位置确定为一个第二地面检测位置,得到多个第二地面检测位置;同时,将所述至少一个第一类传感器中的一个第一类传感器确定为验证传感器(这里,可以由研发人员根据设计需求将所述至少一个第一类传感器中的任一第一类传感器确定为验证传感器,也可以将所述至少一个第一类传 感器中与所述第一地面检测位置的距离最小的第一类传感器确定为验证传感器);根据验证传感器在所述电子设备上的设置位置,以及得到的多个第二地面检测位置,确定第二策略;所述第二策略可以包含所述电子设备原地旋转的多个角度、原地旋转的方向、原地旋转的次数、每次旋转相应角度后的停顿时间以及是否在停止旋转时复位所述电子设备(即控制所述电子设备转回开始原地旋转前的状态)的信息;针对所述第二策略包含的多个角度中的每个角度,控制所述电子设备基于相应方向原地旋转相应角度后,验证传感器对应的地面检测位置为一个第二地面检测位置,在相应的停顿时间内,利用验证传感器对第二地面检测位置进行地面检测,得到多个第三检测结果;此时,可以直接将得到的多个第三检测结果中的每个第三检测结果确定为一个验证结果,得到多个验证结果;当然,针对多个第三检测结果中的每个第三检测结果,也可以确定相应第三检测结果对应的第二地面检测位置,再基于确定的第二地面检测位置确定相应第三检测结果对应的第二检测结果,判断确定的第二检测结果是否和相应第三检测结果相同,若相同,确定验证结果为“正确”;若不同,确定验证结果为“错误”;如果所述第二策略包含在停止旋转时复位所述电子设备的信息,在验证完毕(即完成多个第二检测结果的验证)的情况下,复位所述电子设备。Specifically, when the first judgment result indicates that there are multiple second detection results (that is, at least two second detection results) that are different from the at least one first detection result, each of the multiple second detection results can be determined. The second-type sensor corresponding to the second detection result is determined, that is, multiple second-type sensors are determined, and the ground detection position corresponding to each second-type sensor in the determined multiple second-type sensors is determined as a second ground Detect positions to obtain multiple second ground detection positions; at the same time, determine one of the at least one first type sensor as a verification sensor (here, the at least one first type sensor may be determined by the R&D personnel according to design requirements) Any sensor of the first type in the first type of sensors is determined to be the verification sensor, and the first type of sensor with the smallest distance from the first ground detection position among the at least one first type of sensor may also be determined as the verification sensor); Determine the second strategy according to the verification sensor's setting position on the electronic device and the obtained multiple second ground detection positions; the second strategy may include multiple angles and in-situ rotations of the electronic device The direction of rotation, the number of in-situ rotations, the pause time after each rotation of the corresponding angle, and whether to reset the electronic device when the rotation is stopped (that is, control the electronic device to return to the state before the in-situ rotation); For each of the multiple angles included in the second strategy, after controlling the electronic device to rotate the corresponding angle in situ based on the corresponding direction, it is verified that the ground detection position corresponding to the sensor is a second ground detection position. During the pause, the verification sensor is used to perform ground detection on the second ground detection position, and multiple third detection results are obtained; at this time, each of the multiple third detection results obtained can be directly determined as one third detection result The verification result, multiple verification results are obtained; of course, for each third detection result in the multiple third detection results, the second ground detection position corresponding to the corresponding third detection result can also be determined, and then based on the determined second ground detection result The detection position determines the second detection result corresponding to the corresponding third detection result, and determines whether the determined second detection result is the same as the corresponding third detection result. If they are the same, the verification result is determined to be "correct"; if it is different, the verification result is determined to be " Error"; if the second strategy includes the information of resetting the electronic device when the rotation is stopped, reset the electronic device when the verification is completed (that is, the verification of multiple second detection results is completed).
实际应用时,假设图4所示的扫地机(传感器401为测距传感器,传感器402、传感器403和传感器404为接近传感器)在强日光环境下移动至白色地毯区域时,即传感器401、传感器402、传感器403和传感器404对应的地面检测位置均为白色地毯时,分别获取四个传感器的地面检测结果;此时,传感器401的地面检测结果为“非悬崖”,传感器402、传感器403和传感器404的地面检测结果均为“悬崖”;可见,传感器402、传感器403和传感器404的地面检测结果均与传感器401的地面检测结果不同,需要利用传感器401分别对传感器402、传感器403和传感器404的地面检测结果进行验证。控制扫地机顺时针或逆时针旋转,分别在传感器401到达传感器402、传感器403和传感器404在扫地机旋转前所处的位置时,获取传感器401的地面检测结果,得到的地面检测结果均为“非悬崖”,即得到的三个验证结果均为“非悬崖”。In actual application, assume that the sweeper shown in Figure 4 (
在步骤104中,实际应用时,在得到至少一个验证结果后,可以利用得到的验证结果对获取的至少一个第二检测结果进行更新,得到更新后的至少一个第二检测结果;再基于更新后的至少一个第二检测结果以及至少一个第一检测结果,控制所述电子设备移动。In
基于此,在一实施例中,所述基于所述至少一个第一检测结果、所述至少一个第二检测结果以及所述至少一个验证结果,控制所述电子设备移动,可以包括:Based on this, in an embodiment, the controlling the movement of the electronic device based on the at least one first detection result, the at least one second detection result, and the at least one verification result may include:
利用所述至少一个验证结果对所述至少一个第二检测结果进行更新,得到至少一个更新后的第二检测结果;Update the at least one second detection result by using the at least one verification result to obtain at least one updated second detection result;
判断至少一个更新后的第二检测结果中的每个更新后的第二检测结果是否与所述至少一个第一检测结果相同,得到第二判断结果;Judging whether each updated second detection result in the at least one updated second detection result is the same as the at least one first detection result, to obtain a second judgment result;
基于所述第二判断结果,控制所述电子设备移动。Based on the second judgment result, the electronic device is controlled to move.
实际应用时,所述利用所述至少一个验证结果对所述至少一个第二检测结果进行更新,可以包括:利用所述至少一个验证结果替换所述至少一个第二检测结果中与所述至少一个第一检测结果不同的至少一个第二检测结果。具体地,以图4所示的应用场景为例,利用传感器401对传感器402的地面检测结果进行验证之前,得到了一个第一检测结果(传感器401的地面检测结果为“非悬崖”),以及三个第二检测结果(传感器402的地面检测结果为“悬崖”,传感器403和传感器404的地面检测结果均为“非悬崖”);利用传感器401对传感器402的地面检测结果进行验证之后,得到了针对传感器402的验证结果“非悬崖”;此时,利用验证结果更新三个第二检测结果,得到三个更新后的第二检测结果:传感器402-“非悬崖”、传感器403-“非悬崖”以及传感器404-“非悬崖”;第一检测结果与三个更新后的第二检测结果均为“非悬崖”,即所述第二判断结果表征三个更新后的第二检测结果中的每个第二检测结果与第一检测结果相同;可见,图4所示的应用场景不存在悬崖,可以控制扫地机前进;扫地机前进的距离可以为前述预设距离。控制扫地机前进预设距离后,可以重新执行步骤101至步骤104。In actual application, said using said at least one verification result to update said at least one second detection result may include: replacing said at least one second detection result with said at least one of said at least one verification result by said at least one verification result. At least one second detection result that is different from the first detection result. Specifically, taking the application scenario shown in FIG. 4 as an example, before using the
基于此,在一实施例中,所述第二判断结果表征至少一个更新后的第二检测结果中的每个更新后的第二检测结果与所述至少一个第一检测结果相同;所述控制所述电子设备移动,可以包括:Based on this, in an embodiment, the second judgment result represents that each of the at least one updated second detection result is the same as the at least one first detection result; the control The movement of the electronic device may include:
在所述至少一个更新后的第二检测结果和所述至少一个第一检测结果表征相应传感器与自身对应的地面检测位置的距离小于或等于第一距离的情况下,控制所述电子设备前进第二距离。In the case that the at least one updated second detection result and the at least one first detection result indicate that the distance between the corresponding sensor and its corresponding ground detection position is less than or equal to the first distance, the electronic device is controlled to move forward. Two distance.
实际应用时,可能存在至少一个更新后的第二检测结果与所述至少一个第一检测结果不同,此时,需要基于至少一个更新后的第二检测结果和所述至少一个第一检测结果,确定所述电子设备的前进方向,再基于确定的前进方向控制所述电子设备移动。具体地,以图4所示的应用场景为例,假设图4中的黑色地毯为台阶(即悬崖),传感器401的第一检测结果为“悬崖”,传感器402的第二检测结果也为“悬崖”,传感器403的第二检测结果和传感器404的第二检测结果均为“非悬崖”;可见,传感器403的第二检测结果和传感器404的第二检测结果与传感器401的地面检测结果不同,需要利用传感器401对传感器403的第二检测结果和传感器404的第二检测结果进行验证;得到了针对传感器403的验证结果“非悬崖”以及针对传感器404的验证结果“非悬崖”;此时,利用验证结果更新三个第二检测结果,得到三个更新后的第二检测结果:传感器402-“悬崖”、传感器403-“非悬崖”以及传感器404-“非悬崖”;三个更新后的第二检测结果中,存 在两个更新后的第二检测结果与第一检测结果不同;可见,扫地机前方(即北方)存在悬崖,而扫地机后方(即南方)不存在悬崖;因此,可以将南方确定为扫地机的前进方向,控制扫地机向南方前进所述预设距离;控制扫地机前进预设距离后,可以重新执行步骤101至步骤104。In practical applications, there may be at least one updated second detection result that is different from the at least one first detection result. In this case, it needs to be based on the at least one updated second detection result and the at least one first detection result, The forward direction of the electronic device is determined, and then the electronic device is controlled to move based on the determined forward direction. Specifically, taking the application scenario shown in FIG. 4 as an example, assuming that the black carpet in FIG. 4 is a step (ie a cliff), the first detection result of the sensor 401 is "cliff", and the second detection result of the sensor 402 is also " “Cliff”, the second detection result of sensor 403 and the second detection result of sensor 404 are both “non-cliff”; it can be seen that the second detection result of sensor 403 and the second detection result of sensor 404 are different from the ground detection result of sensor 401 , The sensor 401 needs to be used to verify the second detection result of the sensor 403 and the second detection result of the sensor 404; the verification result of the sensor 403 "non-cliff" and the verification result of the sensor 404 "non-cliff" are obtained; , Use the verification results to update the three second detection results, and get three updated second detection results: sensor 402-"cliff", sensor 403-"non-cliff" and sensor 404-"non-cliff"; after three updates In the second detection result of, there are two updated second detection results that are different from the first detection result; it can be seen that there is a cliff in front of the sweeper (that is, in the north), and there is no cliff behind the sweeper (that is, in the south); therefore, The south can be determined as the forward direction of the sweeper, and the sweeper can be controlled to advance to the south by the preset distance; after the sweeper is controlled to advance the preset distance, step 101 to step 104 can be executed again.
基于此,在一实施例中,所述第二判断结果表征存在至少一个更新后的第二检测结果与所述至少一个第一检测结果不同;所述控制所述电子设备移动,可以包括:Based on this, in an embodiment, the second judgment result indicates that there is at least one updated second detection result that is different from the at least one first detection result; the controlling the movement of the electronic device may include:
基于所述至少一个更新后的第二检测结果和所述至少一个第一检测结果,确定第一方向;Determining the first direction based on the at least one updated second detection result and the at least one first detection result;
基于确定的第一方向,控制所述电子设备前进第三距离。Based on the determined first direction, the electronic device is controlled to advance a third distance.
实际应用时,所述第二判断结果表征至少一个更新后的第二检测结果中的每个更新后的第二检测结果与所述至少一个第一检测结果相同时,还可能存在所述至少一个更新后的第二检测结果和所述至少一个第一检测结果表征相应传感器与自身对应的地面检测位置的距离大于第一距离(例如所有的检测结果均为“悬崖”)的情况,此时,可以根据所述电子设备上的各传感器的相对位置,确定旋转策略,所述旋转策略可以包含所述电子设备原地旋转的多个角度、原地旋转的方向、原地旋转的次数、每次旋转相应角度后的停顿时间以及是否在停止旋转时复位所述电子设备(即控制所述电子设备转回开始原地旋转前的状态)的信息;并控制所述电子设备基于确定的旋转策略原地旋转,在原地旋转的过程中,利用至少一个第一类传感器进行下视检测,根据下视检测的结果确定前进方向,并根据确定的前进方向控制所述电子设备前进所述预设距离。In actual application, when the second judgment result represents at least one updated second detection result, when each updated second detection result is the same as the at least one first detection result, the at least one second detection result may also exist The updated second detection result and the at least one first detection result indicate that the distance between the corresponding sensor and its corresponding ground detection position is greater than the first distance (for example, all detection results are "cliffs"). At this time, The rotation strategy can be determined according to the relative positions of the sensors on the electronic device. The rotation strategy can include multiple angles of the electronic device's in-situ rotation, the direction of in-situ rotation, the number of in-situ rotations, and Information about the pause time after rotating the corresponding angle and whether to reset the electronic device when the rotation is stopped (that is, control the electronic device to return to the state before starting to rotate in place); and control the electronic device based on the determined rotation strategy principle Ground rotation, in the process of in-situ rotation, at least one sensor of the first type is used to perform downward-looking detection, determine the forward direction according to the result of downward-looking detection, and control the electronic device to advance the preset distance according to the determined forward direction.
基于此,在一实施例中,所述第二判断结果表征至少一个更新后的第二检测结果中的每个更新后的第二检测结果与所述至少一个第一检测结果相同;所述控制所述电子设备移动,可以包括:Based on this, in an embodiment, the second judgment result represents that each of the at least one updated second detection result is the same as the at least one first detection result; the control The movement of the electronic device may include:
在所述至少一个更新后的第二检测结果和所述至少一个第一检测结果表征相应传感器与自身对应的地面检测位置的距离大于第一距离的情况下,基于第三策略,控制所述电子设备原地旋转;所述第三策略是根据所述至少一个第一类传感器和所述至少一个第二类传感器在所述电子设备上的相对位置确定的;In the case that the at least one updated second detection result and the at least one first detection result indicate that the distance between the corresponding sensor and its corresponding ground detection position is greater than the first distance, based on the third strategy, control the electronic The device rotates in place; the third strategy is determined according to the relative positions of the at least one first-type sensor and the at least one second-type sensor on the electronic device;
在控制所述电子设备原地旋转的过程中,获取所述至少一个第一类传感器的地面检测结果,得到至少一个第三检测结果;In the process of controlling the in-situ rotation of the electronic device, obtaining a ground detection result of the at least one first-type sensor to obtain at least one third detection result;
基于得到的至少一个第三检测结果,确定第二方向;Determine the second direction based on the obtained at least one third detection result;
基于确定的第二方向,控制所述电子设备前进第四距离。Based on the determined second direction, the electronic device is controlled to advance a fourth distance.
实际应用时,所述第二距离、所述第三距离和所述第四距离可以相同或不同,具体可以由研发人员根据设计需求确定。In practical applications, the second distance, the third distance, and the fourth distance may be the same or different, and may be specifically determined by the research and development personnel according to design requirements.
本申请实施例提供的控制方法,获取电子设备上的至少一个第一类传感器的地面检测结果,得到至少一个第一检测结果;并获取所述电子设备 上的至少一个第二类传感器的地面检测结果,得到至少一个第二检测结果;所述第一类传感器的检测精度大于所述第二类传感器的检测精度;所述检测结果表征相应传感器与自身对应的地面检测位置的距离是否大于第一距离;判断得到的至少一个第二检测结果中的每个第二检测结果是否与得到的至少一个第一检测结果相同,得到第一判断结果;在所述第一判断结果表征存在至少一个第二检测结果与所述至少一个第一检测结果不同的情况下,利用所述至少一个第一类传感器对与所述至少一个第一检测结果不同的至少一个第二检测结果进行验证,得到至少一个验证结果;基于所述至少一个第一检测结果、所述至少一个第二检测结果以及所述至少一个验证结果,控制所述电子设备移动;如此,能够在控制电子设备的成本的前提下,提高电子设备下视检测的准确性,为电子设备配置低成本、高精度的下视检测功能,提升用户体验。The control method provided by the embodiment of the present application obtains the ground detection result of at least one first type sensor on an electronic device to obtain at least one first detection result; and obtains the ground detection result of at least one second type sensor on the electronic device As a result, at least one second detection result is obtained; the detection accuracy of the first type sensor is greater than that of the second type sensor; the detection result indicates whether the distance between the corresponding sensor and its corresponding ground detection position is greater than that of the first type sensor. Distance; judge whether each second detection result in the at least one second detection result obtained is the same as the at least one first detection result obtained, and the first judgment result is obtained; the first judgment result indicates that there is at least one second detection result When the detection result is different from the at least one first detection result, the at least one first type sensor is used to verify at least one second detection result that is different from the at least one first detection result, and at least one verification is obtained Result; Based on the at least one first detection result, the at least one second detection result, and the at least one verification result, the electronic device is controlled to move; in this way, the electronic device can be controlled to increase the cost of the electronic device. The accuracy of the device's down-view detection is to configure low-cost, high-precision down-view detection functions for electronic devices to improve user experience.
下面结合应用实施例对本申请再作进一步详细的描述。The application will be further described in detail below in conjunction with application examples.
在本应用实施例中,所述电子设备为扫地机器人(后续的描述中记作“扫地机”);扫地机底部设置有多级精度的传感器组成的下视传感器系统;这里,多级精度的传感器的含义是:各传感器的类型、型号或地面检测精度不同。具体地,下视传感器系统由一个高精度的传感器(即上述第一类传感器)和多个低精度的传感器(即上述第二类传感器)组成;高精度的传感器可以是测距传感器,低精度的传感器可以是接近传感器。由于测距传感器的检测精度通常为厘米级,因此,测距传感器不会出现深色地面导致的检测结果不准确的问题,也不会出现强日光环境导致的传感器失效的问题。In this application embodiment, the electronic device is a sweeping robot (denoted as "sweeper" in the following description); the bottom of the sweeper is provided with a downward-looking sensor system composed of multi-level precision sensors; here, multi-level precision The meaning of the sensor is: the type, model or ground detection accuracy of each sensor is different. Specifically, the downward-looking sensor system is composed of a high-precision sensor (that is, the above-mentioned first type of sensor) and a plurality of low-precision sensors (that is, the above-mentioned second type of sensor); The sensor can be a proximity sensor. Since the detection accuracy of the distance measuring sensor is usually at the centimeter level, the distance measuring sensor will not have the problem of inaccurate detection results caused by dark ground, nor will it cause the problem of sensor failure caused by strong sunlight.
实际应用时,下视传感器系统包含的传感器个数可以由研发人员根据设计需求确定。比如,下视传感器系统可以包含四个传感器:一个测距传感器和三个接近传感器;以图6所示的扫地机602为例(图6呈现的是扫地机602的反面),传感器6021可以为测距传感器,传感器6022、传感器6023和传感器6024可以为接近传感器。再比如,下视传感器系统可以包含六个传感器:一个测距传感器和五个接近传感器;以图6所示的扫地机601为例(图6呈现的是扫地机601的反面),传感器6011可以为测距传感器,传感器6012、传感器6013、传感器6014、传感器6015和传感器6016可以为接近传感器。In actual application, the number of sensors included in the down-view sensor system can be determined by the R&D personnel according to the design requirements. For example, the downward-looking sensor system can include four sensors: a distance measuring sensor and three proximity sensors; taking the
本应用实施例提供的控制方法具体是这样实现的:The control method provided by this application embodiment is specifically implemented as follows:
图7为本应用实施例的一个应用场景的示意图(图7呈现的是扫地机601的正面),如图7所示,扫地机601向北前进,当扫地机601的前端(图7中扫地机601与黑色地毯重叠的部分可以看作是扫地机601的前端)运行至黑色地毯时,扫地机601的传感器6011和传感器6012在黑色地毯上方;此时,扫地机601的六个传感器的地面检测结果分别是:Figure 7 is a schematic diagram of an application scenario of the application embodiment (Figure 7 shows the front of the sweeper 601). As shown in Figure 7, the
传感器6011的地面检测结果为“非悬崖”,The ground detection result of
传感器6012的地面检测结果为“悬崖”,The ground detection result of
传感器6013的地面检测结果为“非悬崖”,The ground detection result of
传感器6014的地面检测结果为“非悬崖”,The ground detection result of
传感器6015的地面检测结果为“非悬崖”,The ground detection result of
传感器6016的地面检测结果为“非悬崖”;The ground detection result of
可见,传感器6012的地面检测结果与传感器6011的地面检测结果不同;控制扫地机601逆时针原地旋转,将传感器6011旋转至传感器6012的位置,并利用传感器6011对传感器6012的地面检测结果进行验证,以传感器6011的地面检测结果为准;传感器6011对传感器6012的地面检测结果进行验证的结论为“非悬崖”;这样,在图7所示的应用场景中,扫地机601的六个传感器对地面检测的综合结论为“非悬崖”;此时,可以控制扫地机601顺时针旋转回原前进方向(即向北前进的方向),并控制扫地机601继续向北前进预设距离,在前进预设距离后,重复上述步骤,即重新获取并判断六个传感器的地面检测结果。这里,所述预设距离可以根据传感器6011、传感器6012以及扫地机601的辅助轮的相对位置确定。It can be seen that the ground detection result of the
在另一应用场景中,扫地机602向北前进,进入了强日光环境;此时,扫地机602的四个传感器的地面检测结果分别是:In another application scenario, the
传感器6021的地面检测结果为“非悬崖”,The ground detection result of
传感器6022的地面检测结果为“悬崖”,The ground detection result of
传感器6023的地面检测结果为“悬崖”,The ground detection result of
传感器6024的地面检测结果为“悬崖”;The ground detection result of
可见,传感器6022、传感器6023和传感器6024的地面检测结果均与传感器6021的地面检测结果不同;控制扫地机602顺时针或逆时针原地旋转,将传感器6021分别旋转至传感器6022、传感器6023和传感器6024的位置,并利用传感器6021分别对传感器6022、传感器6023和传感器6024的地面检测结果进行验证,以传感器6021的地面检测结果为准;传感器6021对传感器6022、传感器6023和传感器6024的地面检测结果进行验证的结论均为“非悬崖”;这样,在本应用场景中,扫地机602的四个传感器对地面检测的综合结论为“非悬崖”;此时,可以控制扫地机602顺时针或逆时针原地旋转回原前进方向(即向北前进的方向),并控制扫地机602继续向北前进预设距离,在前进预设距离后,重复上述步骤,即重新获取并判断四个传感器的地面检测结果。这里,所述预设距离可以根据传感器6021、传感器6022以及扫地机602的辅助轮的相对位置确定。It can be seen that the ground detection results of the
实际应用时,当扫地机601和扫地机602在除深色地面和强日光环境的其它环境(例如地板地面、地砖地面、浅色地毯等)中移动的过程中,扫地机601的六个传感器和扫地机602的四个传感器均能将非悬崖地面正常检测为“非悬崖”。In practical applications, when the
这里,本应用实施例提供的控制方法的具体实现过程与图1所示的控 制方法中步骤101至步骤104的具体实现过程相同,这里不多赘述。Here, the specific implementation process of the control method provided by this application embodiment is the same as the specific implementation process of
本应用实施例提供的控制方法,具备以下优点:The control method provided by this application embodiment has the following advantages:
针对下视传感器系统包含的多个传感器,通过对多个传感器的检测精度进行分级,划分为一个高精度的传感器和多个低精度的传感器;使得扫地机在少数的低精度下视传感器不能准确进行地面检测的场景下,通过控制扫地机原地旋转,使得高精度下视传感器移动至低精度下视传感器的位置,来进行二次检测;如此,既能够解决低精度下视传感器在少数场景(例如深色地毯、强日光环境)中失效的问题,又能为扫地机维持较低的成本;也就是说,在为扫地机增加少量成本的情况下,提高扫地机下视检测的准确性。For the multiple sensors included in the down-view sensor system, the detection accuracy of the multiple sensors is classified into one high-precision sensor and multiple low-precision sensors; making the sweeper inaccurate with a few low-precision down-view sensors In the scene of ground detection, by controlling the sweeper to rotate in place, the high-precision downward-looking sensor is moved to the position of the low-precision downward-looking sensor for secondary detection; this way, it can solve the problem of low-precision downward-looking sensors in a few scenes. (Such as dark carpets, strong daylight environment), but also can maintain a lower cost for the sweeper; that is to say, in the case of adding a small amount of cost to the sweeper, improve the accuracy of the sweeper's down-view detection .
为了实现本申请实施例的方法,本申请实施例还提供了一种控制装置,如图8所示,控制装置800包括获取单元801、第一处理单元802、第二处理单元803和第三处理单元804;其中,In order to implement the method of the embodiment of the present application, the embodiment of the present application also provides a control device. As shown in FIG. 8, the
所述获取单元801,配置为获取电子设备上的至少一个第一类传感器的地面检测结果,得到至少一个第一检测结果;并获取所述电子设备上的至少一个第二类传感器的地面检测结果,得到至少一个第二检测结果;所述第一类传感器的检测精度大于所述第二类传感器的检测精度;所述检测结果表征相应传感器与自身对应的地面检测位置的距离是否大于第一距离;The acquiring
所述第一处理单元802,配置为判断得到的至少一个第二检测结果中的每个第二检测结果是否与得到的至少一个第一检测结果相同,得到第一判断结果;The
所述第二处理单元803,配置为在所述第一判断结果表征存在至少一个第二检测结果与所述至少一个第一检测结果不同的情况下,利用所述至少一个第一类传感器对与所述至少一个第一检测结果不同的至少一个第二检测结果进行验证,得到至少一个验证结果;The
所述第三处理单元804,配置为基于所述至少一个第一检测结果、所述至少一个第二检测结果以及所述至少一个验证结果,控制所述电子设备移动。The
在一实施例中,所述第一判断结果表征存在一个第二检测结果与所述至少一个第一检测结果不同;所述第二处理单元803,还配置为:In an embodiment, the first judgment result indicates that there is a second detection result that is different from the at least one first detection result; the
基于第一策略,控制所述电子设备原地旋转;所述第一策略是根据第一地面检测位置确定的;所述第一地面检测位置是根据与所述至少一个第一检测结果不同的一个第二检测结果确定的;Based on the first strategy, the electronic device is controlled to rotate in place; the first strategy is determined based on a first ground detection position; the first ground detection position is based on a different one from the at least one first detection result The second test result is confirmed;
在控制所述电子设备原地旋转的过程中,利用所述至少一个第一类传感器中的一个第一类传感器对所述第一地面检测位置进行地面检测,以对与所述至少一个第一检测结果不同的一个第二检测结果进行验证。In the process of controlling the in-situ rotation of the electronic device, one of the at least one first type sensor is used to perform ground detection on the first ground detection position, so as to compare with the at least one first type sensor. A second test result with a different test result is verified.
在一实施例中,所述第一判断结果表征存在至少两个第二检测结果与所述至少一个第一检测结果不同;所述第二处理单元803,还配置为:In an embodiment, the first judgment result indicates that there are at least two second detection results that are different from the at least one first detection result; the
基于第二策略,控制所述电子设备原地旋转;所述第二策略是根据至少两个第二地面检测位置确定的;所述至少两个第二地面检测位置是根据与所述至少一个第一检测结果不同的至少两个第二检测结果确定的;Based on the second strategy, the electronic device is controlled to rotate in place; the second strategy is determined based on at least two second ground detection positions; the at least two second ground detection positions are determined based on the relationship with the at least one first At least two second test results with different test results are confirmed;
在控制所述电子设备原地旋转的过程中,利用所述至少一个第一类传感器中的一个第一类传感器对所述至少两个第二地面检测位置进行地面检测,以对与所述至少一个第一检测结果不同的至少两个第二检测结果进行验证。In the process of controlling the in-situ rotation of the electronic device, one of the at least one first-type sensor is used to perform ground detection on the at least two second ground detection positions, so as to compare with the at least one first-type sensor. At least two second test results with different first test results are verified.
在一实施例中,所述第三处理单元804,还配置为:In an embodiment, the
利用所述至少一个验证结果对所述至少一个第二检测结果进行更新,得到至少一个更新后的第二检测结果;Update the at least one second detection result by using the at least one verification result to obtain at least one updated second detection result;
判断至少一个更新后的第二检测结果中的每个更新后的第二检测结果是否与所述至少一个第一检测结果相同,得到第二判断结果;Judging whether each updated second detection result in the at least one updated second detection result is the same as the at least one first detection result, to obtain a second judgment result;
基于所述第二判断结果,控制所述电子设备移动。Based on the second judgment result, the electronic device is controlled to move.
在一实施例中,所述第二判断结果表征至少一个更新后的第二检测结果中的每个更新后的第二检测结果与所述至少一个第一检测结果相同;所述第三处理单元804,还配置为:In an embodiment, the second judgment result represents that each updated second detection result in the at least one updated second detection result is the same as the at least one first detection result; the
在所述至少一个更新后的第二检测结果和所述至少一个第一检测结果表征相应传感器与自身对应的地面检测位置的距离小于或等于第一距离的情况下,控制所述电子设备前进第二距离。In the case that the at least one updated second detection result and the at least one first detection result indicate that the distance between the corresponding sensor and its corresponding ground detection position is less than or equal to the first distance, the electronic device is controlled to move forward. Two distance.
在一实施例中,所述第二判断结果表征存在至少一个更新后的第二检测结果与所述至少一个第一检测结果不同;所述第三处理单元804,还配置为:In an embodiment, the second judgment result indicates that there is at least one updated second detection result that is different from the at least one first detection result; the
基于所述至少一个更新后的第二检测结果和所述至少一个第一检测结果,确定第一方向;Determining the first direction based on the at least one updated second detection result and the at least one first detection result;
基于确定的第一方向,控制所述电子设备前进第三距离。Based on the determined first direction, the electronic device is controlled to advance a third distance.
在一实施例中,所述第二判断结果表征至少一个更新后的第二检测结果中的每个更新后的第二检测结果与所述至少一个第一检测结果相同;所述第三处理单元804,还配置为:In an embodiment, the second judgment result represents that each updated second detection result in the at least one updated second detection result is the same as the at least one first detection result; the
在所述至少一个更新后的第二检测结果和所述至少一个第一检测结果表征相应传感器与自身对应的地面检测位置的距离大于第一距离的情况下,基于第三策略,控制所述电子设备原地旋转;所述第三策略是根据所述至少一个第一类传感器和所述至少一个第二类传感器在所述电子设备上的相对位置确定的;In the case that the at least one updated second detection result and the at least one first detection result indicate that the distance between the corresponding sensor and its corresponding ground detection position is greater than the first distance, based on the third strategy, control the electronic The device rotates in place; the third strategy is determined according to the relative positions of the at least one first-type sensor and the at least one second-type sensor on the electronic device;
在控制所述电子设备原地旋转的过程中,获取所述至少一个第一类传感器的地面检测结果,得到至少一个第三检测结果;In the process of controlling the in-situ rotation of the electronic device, obtaining a ground detection result of the at least one first-type sensor to obtain at least one third detection result;
基于得到的至少一个第三检测结果,确定第二方向;Determine the second direction based on the obtained at least one third detection result;
基于确定的第二方向,控制所述电子设备前进第四距离。Based on the determined second direction, the electronic device is controlled to advance a fourth distance.
实际应用时,所述获取单元801、所述第一处理单元802、所述第二处 理单元803和所述第三处理单元804可由控制装置800中的处理器结合通信接口实现。In practical applications, the
需要说明的是:上述实施例提供的控制装置800在控制电子设备时,仅以上述各程序模块的划分进行举例说明,实际应用时,可以根据需要而将上述处理分配由不同的程序模块完成,即将终端的内部结构划分成不同的程序模块,以完成以上描述的全部或者部分处理。另外,上述实施例提供的控制装置800与控制方法实施例属于同一构思,其具体实现过程详见方法实施例,这里不再赘述。It should be noted that when the
基于上述程序模块的硬件实现,且为了实现本申请实施例的方法,本申请实施例还提供了一种控制装置,如图9所示,所述控制装置900包括:Based on the hardware implementation of the above-mentioned program modules, and in order to implement the method of the embodiment of the present application, the embodiment of the present application also provides a control device. As shown in FIG. 9, the
通信接口901,能够与其它设备(比如网络设备、终端等)进行信息交互;The
处理器902,与所述通信接口901连接,以实现与其它设备进行信息交互,配置为运行计算机程序时,执行上述一个或多个技术方案提供的方法;The
存储器903,配置为存储能够在所述处理器902上运行的计算机程序。The
具体地,所述处理器902配置为:Specifically, the
获取电子设备上的至少一个第一类传感器的地面检测结果,得到至少一个第一检测结果;并获取所述电子设备上的至少一个第二类传感器的地面检测结果,得到至少一个第二检测结果;所述第一类传感器的检测精度大于所述第二类传感器的检测精度;所述检测结果表征相应传感器与自身对应的地面检测位置的距离是否大于第一距离;Obtain the ground detection result of at least one first type sensor on the electronic device to obtain at least one first detection result; and obtain the ground detection result of at least one second type sensor on the electronic device to obtain at least one second detection result The detection accuracy of the first type sensor is greater than the detection accuracy of the second type sensor; the detection result indicates whether the distance between the corresponding sensor and its corresponding ground detection position is greater than the first distance;
判断得到的至少一个第二检测结果中的每个第二检测结果是否与得到的至少一个第一检测结果相同,得到第一判断结果;Judging whether each second detection result in the obtained at least one second detection result is the same as the obtained at least one first detection result, and obtaining the first judgment result;
在所述第一判断结果表征存在至少一个第二检测结果与所述至少一个第一检测结果不同的情况下,利用所述至少一个第一类传感器对与所述至少一个第一检测结果不同的至少一个第二检测结果进行验证,得到至少一个验证结果;In the case where the first judgment result indicates that there is at least one second detection result that is different from the at least one first detection result, use the at least one first type sensor pair to be different from the at least one first detection result At least one second test result is verified, and at least one verification result is obtained;
基于所述至少一个第一检测结果、所述至少一个第二检测结果以及所述至少一个验证结果,控制所述电子设备移动。Based on the at least one first detection result, the at least one second detection result, and the at least one verification result, the electronic device is controlled to move.
在一实施例中,所述第一判断结果表征存在一个第二检测结果与所述至少一个第一检测结果不同;所述处理器902,还配置为:In an embodiment, the first judgment result indicates that there is a second detection result that is different from the at least one first detection result; the
基于第一策略,控制所述电子设备原地旋转;所述第一策略是根据第一地面检测位置确定的;所述第一地面检测位置是根据与所述至少一个第一检测结果不同的一个第二检测结果确定的;Based on the first strategy, the electronic device is controlled to rotate in place; the first strategy is determined based on a first ground detection position; the first ground detection position is based on a different one from the at least one first detection result The second test result is confirmed;
在控制所述电子设备原地旋转的过程中,利用所述至少一个第一类传感器中的一个第一类传感器对所述第一地面检测位置进行地面检测,以对与所述至少一个第一检测结果不同的一个第二检测结果进行验证。In the process of controlling the in-situ rotation of the electronic device, one of the at least one first type sensor is used to perform ground detection on the first ground detection position, so as to compare with the at least one first type sensor. A second test result with a different test result is verified.
在一实施例中,所述第一判断结果表征存在至少两个第二检测结果与 所述至少一个第一检测结果不同;所述处理器902,还配置为:In an embodiment, the first judgment result indicates that there are at least two second detection results that are different from the at least one first detection result; the
基于第二策略,控制所述电子设备原地旋转;所述第二策略是根据至少两个第二地面检测位置确定的;所述至少两个第二地面检测位置是根据与所述至少一个第一检测结果不同的至少两个第二检测结果确定的;Based on the second strategy, the electronic device is controlled to rotate in place; the second strategy is determined based on at least two second ground detection positions; the at least two second ground detection positions are determined based on the relationship with the at least one first At least two second test results with different test results are confirmed;
在控制所述电子设备原地旋转的过程中,利用所述至少一个第一类传感器中的一个第一类传感器对所述至少两个第二地面检测位置进行地面检测,以对与所述至少一个第一检测结果不同的至少两个第二检测结果进行验证。In the process of controlling the in-situ rotation of the electronic device, one of the at least one first-type sensor is used to perform ground detection on the at least two second ground detection positions, so as to compare with the at least one first-type sensor. At least two second test results with different first test results are verified.
在一实施例中,所述处理器902,还配置为:In an embodiment, the
利用所述至少一个验证结果对所述至少一个第二检测结果进行更新,得到至少一个更新后的第二检测结果;Update the at least one second detection result by using the at least one verification result to obtain at least one updated second detection result;
判断至少一个更新后的第二检测结果中的每个更新后的第二检测结果是否与所述至少一个第一检测结果相同,得到第二判断结果;Judging whether each updated second detection result in the at least one updated second detection result is the same as the at least one first detection result, to obtain a second judgment result;
基于所述第二判断结果,控制所述电子设备移动。Based on the second judgment result, the electronic device is controlled to move.
在一实施例中,所述第二判断结果表征至少一个更新后的第二检测结果中的每个更新后的第二检测结果与所述至少一个第一检测结果相同;所述处理器902,还配置为:In an embodiment, the second judgment result represents that each of the at least one updated second detection result is the same as the at least one first detection result; the
在所述至少一个更新后的第二检测结果和所述至少一个第一检测结果表征相应传感器与自身对应的地面检测位置的距离小于或等于第一距离的情况下,控制所述电子设备前进第二距离。In the case that the at least one updated second detection result and the at least one first detection result indicate that the distance between the corresponding sensor and its corresponding ground detection position is less than or equal to the first distance, the electronic device is controlled to move forward. Two distance.
在一实施例中,所述第二判断结果表征存在至少一个更新后的第二检测结果与所述至少一个第一检测结果不同;所述处理器902,还配置为:In an embodiment, the second judgment result indicates that there is at least one updated second detection result that is different from the at least one first detection result; the
基于所述至少一个更新后的第二检测结果和所述至少一个第一检测结果,确定第一方向;Determining the first direction based on the at least one updated second detection result and the at least one first detection result;
基于确定的第一方向,控制所述电子设备前进第三距离。Based on the determined first direction, the electronic device is controlled to advance a third distance.
在一实施例中,所述第二判断结果表征至少一个更新后的第二检测结果中的每个更新后的第二检测结果与所述至少一个第一检测结果相同;所述处理器902,还配置为:In an embodiment, the second judgment result represents that each updated second detection result in at least one updated second detection result is the same as the at least one first detection result; the
在所述至少一个更新后的第二检测结果和所述至少一个第一检测结果表征相应传感器与自身对应的地面检测位置的距离大于第一距离的情况下,基于第三策略,控制所述电子设备原地旋转;所述第三策略是根据所述至少一个第一类传感器和所述至少一个第二类传感器在所述电子设备上的相对位置确定的;In the case that the at least one updated second detection result and the at least one first detection result indicate that the distance between the corresponding sensor and its corresponding ground detection position is greater than the first distance, based on the third strategy, control the electronic The device rotates in place; the third strategy is determined according to the relative positions of the at least one first-type sensor and the at least one second-type sensor on the electronic device;
在控制所述电子设备原地旋转的过程中,获取所述至少一个第一类传感器的地面检测结果,得到至少一个第三检测结果;In the process of controlling the in-situ rotation of the electronic device, obtaining a ground detection result of the at least one first-type sensor to obtain at least one third detection result;
基于得到的至少一个第三检测结果,确定第二方向;Determine the second direction based on the obtained at least one third detection result;
基于确定的第二方向,控制所述电子设备前进第四距离。Based on the determined second direction, the electronic device is controlled to advance a fourth distance.
需要说明的是:所述处理器902具体执行上述操作的过程详见方法实 施例,这里不再赘述。It should be noted that the specific process of the
当然,实际应用时,控制装置900中的各个组件通过总线系统904耦合在一起。可理解,总线系统904配置为实现这些组件之间的连接通信。总线系统904除包括数据总线之外,还包括电源总线、控制总线和状态信号总线。但是为了清楚说明起见,在图9中将各种总线都标为总线系统904。Of course, in actual application, the various components in the
本申请实施例中的存储器903配置为存储各种类型的数据以支持控制装置900的操作。这些数据的示例包括:用于在控制装置900上操作的任何计算机程序。The
上述本申请实施例揭示的方法可以应用于处理器902中,或者由处理器902实现。处理器902可能是一种集成电路芯片,具有信号的处理能力。在实现过程中,上述方法的各步骤可以通过处理器902中的硬件的集成逻辑电路或者软件形式的指令完成。上述的处理器902可以是通用处理器、数字信号处理器(DSP,Digital Signal Processor),或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。处理器902可以实现或者执行本申请实施例中的公开的各方法、步骤及逻辑框图。通用处理器可以是微处理器或者任何常规的处理器等。结合本申请实施例所公开的方法的步骤,可以直接体现为硬件译码处理器执行完成,或者用译码处理器中的硬件及软件模块组合执行完成。软件模块可以位于存储介质中,该存储介质位于存储器903,处理器902读取存储器903中的信息,结合其硬件完成前述方法的步骤。The methods disclosed in the foregoing embodiments of the present application may be applied to the
在示例性实施例中,控制装置900可以被一个或多个应用专用集成电路(ASIC,Application Specific Integrated Circuit)、DSP、可编程逻辑器件(PLD,Programmable Logic Device)、复杂可编程逻辑器件(CPLD,Complex Programmable Logic Device)、现场可编程门阵列(FPGA,Field-Programmable Gate Array)、通用处理器、控制器、微控制器(MCU,Micro Controller Unit)、微处理器(Microprocessor)、或者其他电子元件实现,用于执行前述方法。In an exemplary embodiment, the
可以理解,本申请实施例的存储器903可以是易失性存储器或者非易失性存储器,也可包括易失性和非易失性存储器两者。其中,非易失性存储器可以是只读存储器(ROM,Read Only Memory)、可编程只读存储器(PROM,Programmable Read-Only Memory)、可擦除可编程只读存储器(EPROM,Erasable Programmable Read-Only Memory)、电可擦除可编程只读存储器(EEPROM,Electrically Erasable Programmable Read-Only Memory)、磁性随机存取存储器(FRAM,ferromagnetic random access memory)、快闪存储器(Flash Memory)、磁表面存储器、光盘、或只读光盘(CD-ROM,Compact Disc Read-Only Memory);磁表面存储器可以是磁盘存储器或磁带存储器。易失性存储器可以是随机存取存储器(RAM,Random Access Memory),其用作外部高速缓存。通过示例性但不是限制性说明,许多形式的RAM可用,例如静态随机存取存储器(SRAM,Static Random Access Memory)、同步静态随机存取存储器(SSRAM,Synchronous Static Random Access Memory)、动态随机存取存储器(DRAM,Dynamic Random Access Memory)、同步动态随机存取存储器(SDRAM,Synchronous Dynamic Random Access Memory)、双倍数据速率同步动态随机存取存储器(DDRSDRAM,Double Data Rate Synchronous Dynamic Random Access Memory)、增强型同步动态随机存取存储器(ESDRAM,Enhanced Synchronous Dynamic Random Access Memory)、同步连接动态随机存取存储器(SLDRAM,SyncLink Dynamic Random Access Memory)、直接内存总线随机存取存储器(DRRAM,Direct Rambus Random Access Memory)。本申请实施例描述的存储器旨在包括但不限于这些和任意其它适合类型的存储器。It can be understood that the
在示例性实施例中,本申请实施例还提供了一种存储介质,即计算机存储介质,具体为计算机可读存储介质,例如包括存储计算机程序的存储器903,上述计算机程序可由控制装置900的处理器902执行,以完成前述方法所述步骤。计算机可读存储介质可以是FRAM、ROM、PROM、EPROM、EEPROM、Flash Memory、磁表面存储器、光盘、或CD-ROM等存储器。In an exemplary embodiment, the embodiment of the present application also provides a storage medium, namely a computer storage medium, specifically a computer-readable storage medium, such as a
需要说明的是:“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。It should be noted that: "first", "second", etc. are used to distinguish similar objects, and not necessarily used to describe a specific sequence or sequence.
另外,本申请实施例所记载的技术方案之间,在不冲突的情况下,可以任意组合。In addition, the technical solutions described in the embodiments of the present application can be combined arbitrarily without conflict.
以上所述,仅为本申请的较佳实施例而已,并非用于限定本申请的保护范围。The above are only preferred embodiments of the present application, and are not used to limit the protection scope of the present application.
Claims (10)
Translated fromChineseApplications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202010201394.2 | 2020-03-20 | ||
| CN202010201394.2ACN111436864B (en) | 2020-03-20 | 2020-03-20 | Control method, device and storage medium |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021184747A1true WO2021184747A1 (en) | 2021-09-23 |
Family
ID=71629371
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/CN2020/121861CeasedWO2021184747A1 (en) | 2020-03-20 | 2020-10-19 | Control method and apparatus, and storage medium |
Country Status (2)
| Country | Link |
|---|---|
| CN (1) | CN111436864B (en) |
| WO (1) | WO2021184747A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114721395A (en)* | 2022-04-15 | 2022-07-08 | 创泽智能机器人集团股份有限公司 | Ground state detection method, device, equipment and medium based on accompanying robot |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111436864B (en)* | 2020-03-20 | 2023-12-29 | 美智纵横科技有限责任公司 | Control method, device and storage medium |
| CN112190187B (en)* | 2020-09-30 | 2021-10-29 | 深圳市银星智能科技股份有限公司 | Control method and device for self-moving robot and self-moving robot |
| CN114647224A (en)* | 2020-12-21 | 2022-06-21 | 北京格灵深瞳信息技术有限公司 | Train maintenance method, system, data management server and storage medium |
| CN115113294B (en)* | 2022-07-20 | 2025-05-16 | 恒洁卫浴集团有限公司 | Sensor control method, device, equipment and storage medium |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20110131741A1 (en)* | 2002-01-03 | 2011-06-09 | Jones Joseph L | Autonomous Floor-Cleaning Robot |
| CN104216404A (en)* | 2013-05-31 | 2014-12-17 | 科沃斯机器人科技(苏州)有限公司 | Self-moving device and control method thereof |
| US10064533B2 (en)* | 2015-03-16 | 2018-09-04 | Irobot Corporation | Autonomous floor cleaning with removable pad |
| CN208323397U (en)* | 2017-08-30 | 2019-01-04 | 深圳市鑫益嘉科技股份有限公司 | A kind of educational robot and its control system |
| CN109917488A (en)* | 2019-03-07 | 2019-06-21 | 上海岚豹智能科技有限公司 | Sweeping robot carpet detection method and equipment |
| CN110101341A (en)* | 2019-05-31 | 2019-08-09 | 尚科宁家(中国)科技有限公司 | Sweeper |
| CN111436864A (en)* | 2020-03-20 | 2020-07-24 | 江苏美的清洁电器股份有限公司 | Control method, control device and storage medium |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100815545B1 (en)* | 2006-12-06 | 2008-03-20 | 삼성광주전자 주식회사 | How to charge the service robot |
| US8961695B2 (en)* | 2008-04-24 | 2015-02-24 | Irobot Corporation | Mobile robot for cleaning |
| EP2659323B1 (en)* | 2010-12-30 | 2018-06-13 | iRobot Corporation | Coverage robot navigation |
| CN104626205B (en)* | 2014-12-11 | 2016-06-08 | 珠海格力电器股份有限公司 | Detection method and device for robot mechanical arm |
| DE102018201615B4 (en)* | 2018-02-02 | 2023-05-17 | BSH Hausgeräte GmbH | Household robot and method for determining the distance of a household robot from a surface |
| CN109528101A (en)* | 2019-01-04 | 2019-03-29 | 云鲸智能科技(东莞)有限公司 | Turning method, mobile robot and the storage medium of mobile robot |
| CN110026993B (en)* | 2019-04-11 | 2020-10-30 | 中国地质大学(武汉) | A human body following robot based on UWB and pyroelectric infrared sensor |
| CN110781821B (en)* | 2019-10-25 | 2022-11-01 | 上海商汤智能科技有限公司 | Target detection method and device based on unmanned aerial vehicle, electronic equipment and storage medium |
- 2020
- 2020-03-20CNCN202010201394.2Apatent/CN111436864B/enactiveActive
- 2020-10-19WOPCT/CN2020/121861patent/WO2021184747A1/ennot_activeCeased
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20110131741A1 (en)* | 2002-01-03 | 2011-06-09 | Jones Joseph L | Autonomous Floor-Cleaning Robot |
| CN104216404A (en)* | 2013-05-31 | 2014-12-17 | 科沃斯机器人科技(苏州)有限公司 | Self-moving device and control method thereof |
| US10064533B2 (en)* | 2015-03-16 | 2018-09-04 | Irobot Corporation | Autonomous floor cleaning with removable pad |
| CN208323397U (en)* | 2017-08-30 | 2019-01-04 | 深圳市鑫益嘉科技股份有限公司 | A kind of educational robot and its control system |
| CN109917488A (en)* | 2019-03-07 | 2019-06-21 | 上海岚豹智能科技有限公司 | Sweeping robot carpet detection method and equipment |
| CN110101341A (en)* | 2019-05-31 | 2019-08-09 | 尚科宁家(中国)科技有限公司 | Sweeper |
| CN111436864A (en)* | 2020-03-20 | 2020-07-24 | 江苏美的清洁电器股份有限公司 | Control method, control device and storage medium |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114721395A (en)* | 2022-04-15 | 2022-07-08 | 创泽智能机器人集团股份有限公司 | Ground state detection method, device, equipment and medium based on accompanying robot |
| CN114721395B (en)* | 2022-04-15 | 2025-02-14 | 创泽智能机器人集团股份有限公司 | Ground state detection method, device, equipment and medium based on accompanying robot |
Also Published As
| Publication number | Publication date |
|---|---|
| CN111436864A (en) | 2020-07-24 |
| CN111436864B (en) | 2023-12-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2021184747A1 (en) | Control method and apparatus, and storage medium | |
| WO2021135645A1 (en) | Map updating method and device | |
| CN111258320A (en) | Robot obstacle avoidance method and device, robot and readable storage medium | |
| US20230017336A1 (en) | Information obtaining method and apparatus | |
| US20220184811A1 (en) | Method and system for initialization diagnosis of mobile robot | |
| KR20220039623A (en) | Radar elevation angle measurement | |
| WO2022179227A1 (en) | Recharging alignment method and apparatus for sweeper, and sweeper | |
| CN111679688A (en) | A charging method, device, readable medium and electronic device for self-propelled robot | |
| KR20220039615A (en) | Radar elevation angle validation | |
| CN115267825A (en) | Obstacle avoidance and navigation method, device and storage medium for sweeper based on TOF sensor | |
| CN114609599A (en) | A method, device, device and medium for determining radar based on high-precision map | |
| CN113607154A (en) | Two-dimensional autonomous positioning method, system, equipment and medium for indoor robot | |
| CN115356711A (en) | External parameter calibration method and device, intelligent robot and computer readable storage medium | |
| CN103185545A (en) | Space vector object three-dimensional rotational coordinate measuring method | |
| JP4051883B2 (en) | Unmanned vehicle position measurement system | |
| CN116202530A (en) | Object positioning and slope equation creation method and device and electronic equipment | |
| CN115590411A (en) | Movement control method of cleaning robot and cleaning robot | |
| WO2022014270A1 (en) | Information processing device, information processing method, and information processing program | |
| CN115542890A (en) | Robot, docking charging seat method thereof, control device and storage medium | |
| CN114564011B (en) | Control method of return device, return device and robot system | |
| CN113848886B (en) | Mobile robot | |
| CN114708329B (en) | Camera external parameter calibration device, calibration method, electronic equipment and medium | |
| CN113640777B (en) | Sensor detection method, detection device, robot, and storable medium | |
| KR20210119080A (en) | 3D Lidar conjugation data collection device using 2D LiDAR | |
| CN113686332B (en) | Mobile robot, navigation method, navigation device, navigation equipment and storage medium thereof |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application | Ref document number:20925184 Country of ref document:EP Kind code of ref document:A1 | |
| NENP | Non-entry into the national phase | Ref country code:DE | |
| 122 | Ep: pct application non-entry in european phase | Ref document number:20925184 Country of ref document:EP Kind code of ref document:A1 |