WO2021107328A1 - Electronic device for searching peripheral environment and method for operating same - Google Patents
Electronic device for searching peripheral environment and method for operating sameDownload PDFInfo
- Publication number
- WO2021107328A1 WO2021107328A1PCT/KR2020/010569KR2020010569WWO2021107328A1WO 2021107328 A1WO2021107328 A1WO 2021107328A1KR 2020010569 WKR2020010569 WKR 2020010569WWO 2021107328 A1WO2021107328 A1WO 2021107328A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- sensor
- sensor signals
- electronic device
- antenna
- opening
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images













Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/04—Systems determining presence of a target
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/02—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems using reflection of acoustic waves
- G01S15/04—Systems determining presence of a target
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/04—Systems determining the presence of a target
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V3/00—Electric or magnetic prospecting or detecting; Measuring magnetic field characteristics of the earth, e.g. declination, deviation
- G01V3/12—Electric or magnetic prospecting or detecting; Measuring magnetic field characteristics of the earth, e.g. declination, deviation operating with electromagnetic waves
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
Definitions
- the present disclosurerelates to an electronic device searching for a surrounding environment and an operating method thereof.
- the sensor for searching the surrounding environmentmay be installed in various mobile devices to provide the mobile device with a search result of the surrounding environment so that the mobile device can determine a moving route by itself. For example, based on the information about the surrounding environment obtained by the sensor (eg, radar sensor, lidar sensor), the mobile device (eg, robot vacuum cleaner, delivery robot, vehicle) creates a map about its surrounding environment Alternatively, by detecting an object located in the surrounding environment, the moving route may be determined by itself.
- the sensoreg, radar sensor, lidar sensor
- the mobile deviceeg, robot vacuum cleaner, delivery robot, vehicle
- the moving routemay be determined by itself.
- the mobile devicemay obtain search results for various areas around it by using a sensor that searches the surrounding environment. Depending on the sensor state when the sensor signal is emitted, search results for different areas may be obtained. have.
- An object of the present inventionis to propose a more efficient method for searching the surrounding environment of a mobile device by using a sensor for searching the surrounding environment.
- An object of the present disclosureis to solve the above-described problem, and to provide an electronic device for searching a surrounding environment and an operating method thereof.
- Another object of the present inventionis to provide a computer-readable recording medium in which a program for executing the method in a computer is recorded.
- the technical problem to be solvedis not limited to the technical problems as described above, and other technical problems may exist.
- FIG. 1is a diagram illustrating an example of searching a surrounding environment according to an embodiment.
- FIG. 2is a diagram illustrating an example of a direction range in which a plurality of sensor signals may be radiated according to an embodiment.
- FIG. 3is a diagram illustrating an example of a top down view of an electronic device emitting a plurality of sensor signals according to an embodiment.
- FIG. 4is a block diagram illustrating an internal configuration of an electronic device according to an exemplary embodiment.
- FIG. 5is a block diagram illustrating an internal configuration of an electronic device according to an exemplary embodiment.
- FIG. 6is a flowchart illustrating a method of searching for a surrounding environment according to an exemplary embodiment.
- FIG. 7illustrates an example of a sensor provided in an electronic device according to an embodiment.
- FIG. 8illustrates an example of a sensor operating in a first operation mode and a second operation mode according to an embodiment.
- FIG. 9is a diagram illustrating an example of a signal detected by a sensor according to an embodiment.
- 10, 11, and 12are diagrams illustrating an example of a signal obtained by a sensor operating in a first operation mode according to an embodiment.
- FIG. 13 and 14are diagrams illustrating an example of searching a second surrounding area in a second operation mode according to an embodiment.
- 15is a diagram illustrating an example of detecting a state of an object according to an embodiment.
- a first aspect of the present disclosureprovides a method for searching a surrounding environment in an electronic device, in which a sensor for searching the surrounding environment is included in a first direction range, and a plurality of radiating the plurality of sensor signals through the antenna of the first opening when the sensor signals can be radiated; searching for a first peripheral area based on reflection signals of a plurality of sensor signals radiated through the antenna of the first opening; radiating the plurality of sensor signals through an antenna of a second opening when the sensor can radiate a plurality of sensor signals in a direction belonging to a second direction range; and searching for a second peripheral area based on reflection signals of a plurality of sensor signals radiated through the second opening.
- a sensing unitthat radiates the plurality of sensor signals and radiates the plurality of sensor signals through an antenna of a second opening when the plurality of sensor signals can be radiated in a direction belonging to a second direction range; and based on the reflected signals for the plurality of sensor signals radiated through the antenna of the first opening, the first peripheral region is searched for, and the reflected signal for the plurality of sensor signals radiated through the second opening
- An electronic devicethat includes at least one processor that searches for a second peripheral area based on the data may be provided.
- a third aspect of the present disclosuremay provide a recording medium in which a program for performing the method of the first aspect is stored.
- FIG. 1is a diagram illustrating an example of searching a surrounding environment according to an embodiment.
- an electronic device 1000radiates a sensor signal through a sensor 100 for searching a surrounding environment, thereby providing a first surrounding area 110 and a second surrounding area ( 120) can be explored.
- the electronic device 1000may be implemented in various forms.
- the electronic device 1000 described hereinis a movable device, and may include a delivery robot, a robot cleaner, a vehicle, and the like, but is not limited thereto.
- the electronic device 1000may generate map data for the surrounding environment or detect various types of objects existing in the surrounding environment based on a result of searching the surrounding environment. Accordingly, the electronic device 1000 may determine the moving path of the electronic device 1000 according to the map data generation result and the object recognition result, and may move according to the determined moving path.
- the sensor 100may radiate a plurality of sensor signals through an aperture of a predetermined size.
- a plurality of sensor signalsmay be radiated through an antenna having an opening of a predetermined size provided in the sensor 100 .
- the sensor 100according to an embodiment emits a plurality of sensor signals using a plurality of antennas having openings of different sizes, and generates image data based on reflected signals of the radiated signals. By doing so, you can explore the surrounding environment.
- the electronic device 1000may generate map data for the surrounding environment or recognize an object existing in the surrounding environment, based on image data including the surrounding environment.
- the sensor 100may be a radar sensor capable of generating image data including a surrounding environment by emitting radio signals as a sensor signal.
- the sensor 100may be a lidar sensor, an image sensor, etc. capable of generating image data including a surrounding environment by emitting laser or light as a sensor signal.
- the sensor 100is not limited to the above-described example, and may be various types of sensors capable of searching a surrounding environment.
- the size of the openingthat is, the larger the area, the greater the directivity of the emitted sensor signals, the more distant the surrounding environments 111 and 113 may be searched. , a narrower range of the surrounding environment 112 may be explored.
- the area of the opening of the antennabecomes narrower, the directivity of the radiated sensor signals decreases, so that a nearby environment may be searched at a closer distance, but the surrounding environment 121 of a wider range may be searched in a vertical plane. .
- the sensor 100may radiate a plurality of sensor signals for searching the surrounding environment in various directions.
- the sensor 100may radiate a plurality of sensor signals in a direction horizontal to the horizontal plane while rotating on a horizontal plane, but is not limited thereto, and rotates in an omnidirentional direction, including a horizontal plane, It may radiate a plurality of sensor signals in various directions.
- the sensor 100may use the antenna of the first opening when it is possible to radiate sensor signals in a direction belonging to a first direction range among various directional ranges in which a plurality of sensor signals may be radiated. By using it, a plurality of sensor signals may be radiated. For example, when the sensor 100 rotates 360 degrees on a horizontal plane and radiates a plurality of sensor signals, while the sensor 100 is in the first direction range in the 360 degree direction range, the antenna of the first opening Through , a plurality of sensor signals may be radiated.
- the sensor 100may radiate a plurality of sensor signals through the antenna of the second opening in a direction belonging to the second direction range other than the first direction range. For example, when the sensor 100 faces a direction belonging to the second direction range among the 360 degree direction range, a plurality of sensor signals may be radiated through the antenna of the second opening.
- the sensor 100radiates a plurality of sensor signals through the antenna of the first opening together with the antenna of the second opening in the direction belonging to the second direction range, so that the first peripheral region and the second 2 surrounding areas can be searched together. Accordingly, when the sensor 100 according to an embodiment is present in the first direction range, a plurality of sensor signals may be radiated through the antenna of the first opening, and when the sensor 100 is present in the second direction range, the first opening A plurality of sensor signals may be radiated by using both the antenna of , and the antenna of the second aperture.
- the sensor signal for searching the first surrounding areais expressed in Equation 1 below. Accordingly, it may be determined based on a Fast Fourier Transform (FFT).
- FFTFast Fourier Transform
- Equation 1is a complex expression containing information about the phase and amplitude of the reflected signal.
- Rrepresents the radius of rotation, may represent an angle corresponding to a boundary between the first direction range and the second direction range.
- ⁇may represent a wavelength for the reflected signal.
- ⁇may represent the emitted direction of the reflected signal.
- the sensor signals according to an embodimentmay be acquired according to various methods.
- the senor 100may radiate a plurality of sensor signals using antennas having different apertures according to a direction range toward which the sensor 100 is directed.
- the electronic device 1000may search different surrounding areas using one sensor rotating in various directions.
- the senor 100may radiate a plurality of sensor signals in directions belonging to different directional ranges through antennas having openings of various sizes.
- the sensor 100may radiate a plurality of sensor signals using a plurality of antennas having different openings while rotating on a horizontal plane at a constant period. According to an embodiment, based on the rotation period of the sensor 100 , a direction range toward which the sensor 100 is directed may be determined.
- a plurality of Sensor signalsmay be radiated.
- the remaining time interval excluding the time interval between n*T-10ms and n*T+10ms, that is, in the time interval between n*T+10ms and (n+1)*T-10msthe second opening A plurality of sensor signals may be radiated through the antenna.
- the sensor signalsmay be radiated by using not only the antenna of the second opening but also the antenna of the first opening.
- the area detected by the sensor signals radiated through the antenna of the second openingis vertically wider than the area detected by the sensor signals radiated using the antenna of the first opening. may include Therefore, within the same size range, even if the sensor signals are radiated through the antenna of the second opening less times than the number of times that the sensor signals are radiated through the antenna of the first opening, regions searched by the respective sensor signals The sensor signals may be radiated so that regions overlapping each other are minimized.
- the sensor 100may radiate sensor signals by alternately using the antenna of the first aperture and the antenna of the second aperture.
- the radiation operation of the sensor signal through the antenna of the second openingis performed at a predetermined interval (ex. It can be performed b times (where b is a constant value less than a) at intervals of multiples of 3).
- the radiation operation of the sensor signal through the antenna of the first openingmay be performed a-b times in the second direction range.
- a radiation operation of the sensor signalwhen the radiation operation of the sensor signal is performed N times while the sensor 100 rotates once, from the 1st to the M (M is a constant value less than N) th, a multiple of 3 intervals (ex. 1, 3, 6, 9 ... th), a radiation operation of the sensor signal through the antenna of the second opening may be performed. In addition, the remaining 2, 3, 4, 5, 7, 8 ... In the second, the radiation operation of the sensor signal through the antenna of the first opening may be performed. In addition, from the M+1-th to the N-th, a radiation operation of the sensor signal through the antenna of the first opening may be performed.
- the sensormay be used to stop the electronic device 1000 according to the search result of the second surrounding area while moving as shown in FIG. 1 .
- a range of rotational speeds ofcan be determined. For example, when the electronic device 1000 moves at a moving speed of 30 cm/sec, the moving distance and time taken from the moment a signal for controlling the electronic device 1000 is output until the electronic device 1000 stops It is assumed that these are 5 cm and 1/6 second, respectively. In this case, the rotation speed of the sensor should be 1/6 second or more per rotation.
- the wavelength ( ⁇ ) of the sensor signal emitted by the sensor according to an embodimentis 2 ⁇ R/N ⁇ ⁇ /3 (R is the rotation radius, N is the number of measurements per time to minimize distortion due to rotation) ) can be determined by
- the frequency of the sensor signalmay be determined in various ways.
- FIG. 2is a diagram illustrating an example of a direction range in which a plurality of sensor signals may be radiated according to an embodiment.
- reference numeral 210illustrates an example of a direction range in which a plurality of sensor signals may be radiated.
- Each of the circles shown in 210corresponds to the position of the sensor 100 at different viewpoints as the sensor 100 rotates in a circle with a radius R on a horizontal plane when the sensor 100 is viewed from above. .
- Reference numeral 220illustrates an example of the electronic device 1000 including the sensor 100 emitting a plurality of sensor signals, viewed from the side, according to an embodiment.
- the sensor 100may search the surrounding environment by radiating a plurality of sensor signals while rotating in a circular shape having a radius of R on a horizontal plane. .
- the surrounding environment detected by the sensor 100may include an area of a relatively greater distance, but may include an area of a narrower range in the vertical plane.
- the surrounding environment detected by the sensor 100includes an area of a narrower range in a vertical plane, an object existing at a position lower or higher than the sensor 100 may be detected by the sensor 100 . It may not be included in the surrounding environment 215 searched for by the
- the surrounding environment detected by the sensor 100may include an area of a relatively closer distance, but may include an area of a wider range in the vertical plane.
- the surrounding environment detected by the sensor 100includes a wider area in a vertical plane, an object existing at a position lower or higher than the sensor 100 may also be detected by the sensor 100 . may be included in the surrounding environment 216 discovered by
- a plurality of sensor signalsare radiated by using not only the antenna 214 of the second opening but also the antenna 213 of the first opening.
- the surrounding areacan be searched.
- the sensor signalsmay be radiated m times at a predetermined interval through the antenna 214 of the second opening.
- sensor signalsmay be radiated n-m times.
- FIG 3is a diagram illustrating an example of a top down view of the electronic device 1000 emitting a plurality of sensor signals according to an embodiment.
- the electronic device 1000 shown in FIG. 3corresponds to the side view of the electronic device 1000 shown in FIG. 1 .
- the sensor 100rotates in a circular shape having a radius of a predetermined size on a horizontal plane and radiates a plurality of sensor signals, thereby protecting the surrounding environment. can explore.
- the plurality of sensor signals 315are radiated through the antenna 213 of the first opening, so that the object belongs to the area 310 . Fields 311 and 313 may be detected.
- the sensor 100When the sensor 100 according to an embodiment is in the range of 212 shown in FIG. 2 among the ranges of 360 degrees, as a plurality of sensor signals 322 are radiated through the antenna 214 of the second opening, Objects belonging to area 320 may be detected.
- the sensor 100transmits a plurality of sensor signals 322 through the antenna 214 of the second aperture m at a predetermined interval when the sensor signals are radiated n times at the same time interval in the range of 212 . While radiating once, the plurality of sensor signals 322 are transmitted through the antenna 213 of the first aperture in the remaining section, that is, in the section between two time points when the sensor signal is radiated to the antenna 214 of the second aperture. can be radiated.
- 312 and 321 illustrated in FIG. 3correspond to 112 and 121 illustrated in FIG. 1 , respectively.
- 312corresponds to an area that can be searched through the antenna 213 of the first opening.
- 321corresponds to a region that can be searched through the antenna 214 of the second opening, but is not searched through the antenna 213 of the first opening.
- FIG. 4is a block diagram illustrating an internal configuration of the electronic device 1000 according to an embodiment.
- FIG. 5is a block diagram illustrating an internal configuration of the electronic device 1000 according to an embodiment.
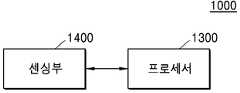
- the electronic device 1000may include a processor 1300 and a sensing unit 1400 . However, not all of the components shown in FIG. 4 are essential components of the electronic device 1000 .
- the electronic device 1000may be implemented by more components than those illustrated in FIG. 4 , or the electronic device 1000 may be implemented by fewer components than those illustrated in FIG. 4 .
- the electronic device 1000includes a user input unit 1100 and an output unit ( 1200 ), a communication unit 1500 , an A/V input unit 1600 , and a memory 1700 may be further included.
- the user input unit 1100means a means for a user to input data for controlling the electronic device 1000 .
- the user input unit 1100includes a keypad, a dome switch, and a touch pad (contact capacitive method, pressure resistance film method, infrared sensing method, surface ultrasonic conduction method, integral type).
- a tension measurement methoda piezo effect method, etc.
- a jog wheela jog switch, and the like, but is not limited thereto.
- the user input unit 1100may receive a user input for the electronic device 1000 to search for a surrounding environment.
- the output unit 1200may output an audio signal, a video signal, or a vibration signal, and the output unit 1200 may include a display unit 1210 , a sound output unit 1220 , and a vibration motor 1230 . have.
- the display unit 1210displays and outputs information processed by the electronic device 1000 .
- the display unit 1210may output information about a result of searching for a surrounding environment.
- the display unit 1210may be used as an input device in addition to an output device.
- the display unit 1210includes a liquid crystal display, a thin film transistor-liquid crystal display, an organic light-emitting diode, a flexible display, a three-dimensional display ( 3D display) and electrophoretic display (electrophoretic display) may include at least one. Also, depending on the implementation form of the electronic device 1000 , the electronic device 1000 may include two or more display units 1210 .
- the sound output unit 1220outputs audio data received from the communication unit 1500 or stored in the memory 1700 . According to an embodiment, the sound output unit 1220 may output information about a result of searching for a surrounding environment.
- the vibration motor 1230may output a vibration signal. Also, the vibration motor 1230 may output a vibration signal when a touch is input to the touch screen. According to an embodiment, the vibration motor 1230 may output information about a result of searching for a surrounding environment.
- the processor 1300generally controls the overall operation of the electronic device 1000 .
- the processor 1300executes programs stored in the memory 1700 , and thus the user input unit 1100 , the output unit 1200 , the sensing unit 1400 , the communication unit 1500 , and the A/V input unit 1600 . ) can be controlled in general.
- the electronic device 1000may include at least one processor 1300 .
- the electronic device 1000may include various types of processors, such as a central processing unit (CPU), a graphics processing unit (GPU), and a neural processing unit (NPU).
- CPUcentral processing unit
- GPUgraphics processing unit
- NPUneural processing unit
- the processor 1300may be configured to process instructions of a computer program by performing basic arithmetic, logic, and input/output operations.
- the commandmay be provided to the processor 1300 from the memory 1700 or may be received through the communication unit 1500 and provided to the processor 1300 .
- the processor 1300may be configured to execute instructions according to program codes stored in a recording device such as a memory.
- the processor 1300may generate a plurality of sensor signals through an antenna of a first aperture when a sensor for searching the surrounding environment can radiate a plurality of sensor signals in a direction belonging to the first direction range. It can emit sensor signals.
- the processor 1300may search for a first surrounding area based on reflection signals of the plurality of radiated sensor signals.
- the processor 1300is configured to, when the sensor for searching the surrounding environment can radiate a plurality of sensor signals in a direction belonging to the second direction range, the plurality of sensor signals through the antenna of the second opening. can radiate
- the processor 1300 according to an embodimentmay search for a second surrounding area based on reflection signals of the plurality of radiated sensor signals.
- the processor 1300may search for different surrounding areas by using antennas including apertures of different sizes according to a direction range in which the sensor can radiate a plurality of sensor signals. have.
- the first peripheral areamay include a surrounding environment located at a relatively greater distance than the second peripheral area.
- the second peripheral areamay include a surrounding environment of a wider area in a vertical plane than the first peripheral area.
- the first peripheral regionmay include a peripheral environment relatively flush with or at a height similar to that of the sensor, whereas the second peripheral region may further include a peripheral environment having a height higher or lower than that of the sensor.
- a search for a surrounding environment having different characteristicsmay be performed at a location with respect to the electronic device 1000 using antennas having openings of different sizes.
- the electronic device 1000may generate map data or detect an object in the surrounding environment based on surrounding environments having different characteristics.
- map data for the surrounding environment of the electronic device 1000may be generated based on a result of searching for at least one of the first surrounding area and the second surrounding area. Also, the electronic device 1000 according to an embodiment may recognize at least one object located in the vicinity of the electronic device 1000 based on a result of the search for the second surrounding area.
- the sensing unit 1400may detect a state of the electronic device 1000 or a state around the electronic device 1000 , and transmit the sensed information to the processor 1300 .
- the sensing unit 1400includes a geomagnetic sensor 1410 , an acceleration sensor 1420 , a temperature/humidity sensor 1430 , an infrared sensor 1440 , a gyroscope sensor 1450 , and a position sensor.
- a geomagnetic sensor 1410for example, GPS, lidar sensor, radar sensor
- barometric pressure sensor 1470for example, barometric pressure sensor 1470
- proximity sensor 1480may include at least one of the RGB sensor (illuminance sensor) 1490, but is limited thereto no.
- the sensing unit 1400is a position sensor 1460 for searching a surrounding environment, and may include, for example, a lidar sensor or a radar sensor.
- a lidar sensor or a radar sensormay radiate a plurality of sensor signals using antennas having openings of various sizes, and based on the reflected signals for the radiated signals, it is possible to search the surrounding environment. have.
- the lidar sensor or the radar sensormay search the surrounding environment by using antennas having different sizes of apertures according to a direction range in which a plurality of sensor signals may be radiated.
- the communication unit 1500may include one or more components that allow the electronic device 1000 to communicate with the server 2000 or an external device (not shown).
- the communication unit 1500may include a short-range communication unit 1510 , a mobile communication unit 1520 , and a broadcast receiving unit 1530 .
- Short-range wireless communication unit 1510Bluetooth communication unit, BLE (Bluetooth Low Energy) communication unit, short-range wireless communication unit (Near Field Communication unit), WLAN (Wi-Fi) communication unit, Zigbee (Zigbee) communication unit, infrared ( It may include an IrDA, infrared Data Association) communication unit, a Wi-Fi Direct (WFD) communication unit, an ultra wideband (UWB) communication unit, an Ant+ communication unit, and the like, but is not limited thereto.
- the mobile communication unit 1520transmits/receives a radio signal to and from at least one of a base station, an external terminal, and a server on a mobile communication network.
- the wireless signalmay include various types of data according to transmission/reception of a voice call signal, a video call signal, or a text/multimedia message.
- the broadcast receiver 1530receives a broadcast signal and/or broadcast-related information from the outside through a broadcast channel.
- the broadcast channelmay include a satellite channel and a terrestrial channel.
- the electronic device 1000may not include the broadcast receiver 1530 .
- the communication unit 1500may transmit/receive information necessary to search for a surrounding environment.
- the A/V (Audio/Video) input unit 1600is for inputting an audio signal or a video signal, and may include a camera 1610 , a microphone 1620 , and the like.
- the camera 1610may obtain an image frame such as a still image or a moving image through an image sensor in a video call mode or a photographing mode.
- the image captured through the image sensormay be processed through the processor 1300 or a separate image processing unit (not shown).
- the microphone 1620receives an external sound signal and processes it as electrical voice data.
- the microphone 1620may receive a user's voice input for performing a surrounding environment search.
- the memory 1700may store a program for processing and control of the processor 1300 , and may also store data input to or output from the electronic device 1000 .
- the memory 1700may store data required to search for a surrounding environment.
- the memory 1700may store the generated map data based on a result of searching the surrounding environment.
- the memory 1700may include a flash memory type, a hard disk type, a multimedia card micro type, a card type memory (eg, SD or XD memory), and a RAM.
- RAMRandom Access Memory
- SRAMStatic Random Access Memory
- ROMRead-Only Memory
- EEPROMElectrically Erasable Programmable Read-Only Memory
- PROMProgrammable Read-Only Memory
- magnetic memorymagnetic disk
- magnetic diskmay include at least one type of storage medium among optical disks.
- Programs stored in the memory 1700may be classified into a plurality of modules according to their functions, for example, may be classified into a UI module 1710 , a touch screen module 1720 , a notification module 1730 , and the like. .
- the UI module 1710may provide a specialized UI, GUI, or the like that interworks with the electronic device 1000 for each application.
- the touch screen module 1720may detect a touch gesture on the user's touch screen and transmit information about the touch gesture to the processor 1300 .
- the touch screen module 1720according to some embodiments may recognize and analyze a touch code.
- the touch screen module 1720may be configured as separate hardware including a controller.
- a tactile sensoris an example of a sensor for detecting a touch of a touch screen.
- a tactile sensorrefers to a sensor that senses a touch of a specific object to a degree or more that a person feels.
- the tactile sensormay sense various information such as the roughness of the contact surface, the hardness of the contact object, and the temperature of the contact point.
- the user's touch gesturemay include a tap, touch & hold, double tap, drag, pan, flick, drag and drop, swipe, and the like.
- the notification module 1730may generate a signal for notifying the occurrence of an event in the electronic device 1000 .
- FIG. 6is a flowchart illustrating a method of searching for a surrounding environment according to an exemplary embodiment.
- the electronic device 1000may radiate a plurality of sensor signals output by the sensor through the antenna of the first opening in a direction belonging to the first direction range.
- the electronic device 1000may radiate the sensor signals through the antenna of the first opening.
- a sensormay radiate a plurality of sensor signals through an antenna of a first opening in a direction belonging to a first direction range among various directional ranges in which a plurality of sensor signals may be radiated. For example, when the sensor rotates 360 degrees on a horizontal plane and radiates a plurality of sensor signals, while the sensor 100 faces a direction belonging to the first direction range in a 360 degree direction range, the antenna of the first opening Through this, a plurality of sensor signals may be radiated.
- the electronic device 1000may search for a first surrounding area based on reflection signals of the plurality of radiated sensor signals in operation 610 .
- the reflected signalmay include signals reflected by a plurality of radiated sensor signals hitting surfaces of various objects existing in the surrounding environment in step 610 .
- the electronic device 1000searches the surrounding environment by determining the location and shape of objects with which sensor signals collide, based on various characteristics of the reflected signal, such as intensity, reception time, and waveform of the reflected signal. can do. According to an embodiment, as sensor signals radiated through the antenna of the first opening are reflected from the surfaces of objects belonging to the first peripheral region, the electronic device 1000 detects the first peripheral region based on the reflected signals. can explore.
- the electronic device 1000radiates a plurality of sensor signals in a direction belonging to the second direction range through the antenna of the second opening, and in operation 640, Based on the reflected signal, the second peripheral area may be searched.
- the senor 100may radiate a plurality of sensor signals using antennas having different apertures according to a direction range toward which the sensor 100 is directed.
- the electronic device 1000may search different surrounding areas using one sensor rotating in various directions.
- the size of the openingthat is, the larger the area, the greater the directivity of the emitted sensor signals, the greater the distance the surrounding environment can be searched, but in the vertical plane, the narrower range The surrounding environment may be explored.
- the area of the opening of the antennadecreases, the directivity of the radiated sensor signals decreases, so that a nearby environment may be searched at a closer distance, but a surrounding environment of a wider range may be searched in a vertical plane.
- sensor signalsmay be radiated by using not only the antenna of the second opening but also the antenna of the first opening.
- the sensor 100may radiate sensor signals using the antenna of the first aperture and the antenna of the second aperture.
- the radiation operation of the sensor signal through the antenna of the second openingwhen the sensor 100 performs an operation of radiating a total of a number of sensor signals at regular intervals in the second direction range, the radiation operation of the sensor signal through the antenna of the second opening is , may be performed b times (where b is a constant value smaller than a) at a predetermined interval (eg, a multiple of 3).
- the radiation operation of the sensor signal through the antenna of the first apertureis performed at regular intervals or all sections in the sections between two points at which the radiation action of the sensor signal through the antenna of the second aperture is performed at a predetermined interval. , within the range of the second direction, it may be performed a total of ab times.
- a total of a timesmay be performed.
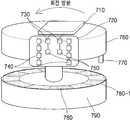
- FIG. 7is a diagram illustrating an example of a sensor 730 included in the electronic device 1000 according to an embodiment.
- the senor 720may be mounted on a rotating part 740 for rotation coupled with a fixing part 790 fixed to the electronic device 1000 , and the sensor 730 may include the electronic device 1000 .
- a search operationmay be performed on the surrounding area of 1000 .
- the control unit 710is a configuration for controlling the sensor 720 , and controls the sensor 720 according to a control signal received from the processor 1300 of FIG. 5 , or the processor 1300 of FIG. 5 . ) and may have a corresponding configuration. Without being limited to the above-described example, the control unit 710 may be configured to control the sensor 720 in various ways.
- the sensor 720while rotating according to the direction of the arrow shown in FIG. 7, radiates a plurality of sensor signals for searching the surrounding area, and based on the reflected signals for the radiated signals, You can explore the surrounding area.
- the sensor 720 according to an embodimentcorresponds to the sensor 100 of FIG. 1 , and is mounted on an upper portion of the electronic device 1000 to perform an operation of searching a surrounding area.
- the sensor 720may be, for example, a radar sensor. Not limited to the above-described example, the sensor 720 according to an embodiment may include various types of sensors that radiate sensor signals through antennas of various apertures and search a surrounding area based on the reflected signals. can
- the sensor 720may further include a switch 730 , an antenna 740 having a first opening, and an antenna 750 having a second opening.
- the exampleis not limited to the above-described example, and the sensor 720 may further include various components necessary to search a surrounding area of the electronic device 1000 .
- the switch 730rotates according to the rotational direction, depending on the position of the sensor 720 , so that the sensor signals can be radiated using antennas having different apertures, the operation mode of the sensor 720 .
- the operation mode of the sensor 720includes a first operation mode in which sensor signals are radiated using the antenna 740 having a first opening and a sensor signals radiated using the antenna 750 having a second opening. and a second mode of operation.
- the operation mode of the sensor 720may exist as many operation modes as the types of antennas having different apertures.
- the sensor 720When the sensor 720 is operated in the first operation mode by the switch 730 according to the rotation position of the sensor 720 according to the antenna 740 of the first opening according to an embodiment, the sensor 720 is By emitting a plurality of sensor signals, it may be used to search for a first surrounding area.
- the antenna 740 of the first openingWhen the size of the first opening according to an embodiment is larger than the size of the second opening, the antenna 740 of the first opening is farther away than the second peripheral area searched by the antenna 750 of the second opening. It can be used to search for a first surrounding area existing in .
- the antenna 750 of the second openingaccording to an embodiment, according to the rotational position of the sensor 720, in the second operation mode by the switch 730, when the sensor 720 is operated, the sensor 720 may emit a plurality of sensor signals, and may be used to search for a second surrounding area.
- the antenna 750 of the second opening according to an exemplary embodimentmay be used to search for a second peripheral area that exists closer than the above-described first peripheral area, but includes a vertically wider area.
- the rotation unit 760rotates according to the rotation direction indicated by the arrow shown in FIG. 7 so that the sensor 720 mounted on the rotation unit 760 can be rotated in a circular shape having a radius of R.
- the sensor 720 according to an embodimentmay rotate in the electronic device 1000 by the rotating part 760 of various types.
- the detection unit 770may detect a rotational position of the sensor 720 , and may operate so that the switch 730 may switch an operation mode according to the position of the sensor 720 . As shown in FIG. 7 , the detection unit 770 according to an embodiment may be mounted on the rotating unit 760 together with the sensor 720 to rotate at the same speed as the sensor 720 .
- the detection unit 770detects the rotational position of the sensor 720 by detecting surfaces 780 of different characteristics of the fixing unit 790 that are converted according to the rotation of the detection unit 770 . can do.
- the detection unit 770may be a photodiode capable of detecting the surfaces 780 having different characteristics of the fixing unit 790 , but is not limited thereto, and may be various types and types of sensors. .
- surfaces with different characteristicsmay be alternately detected by the detecting unit 770 , and the length is shorter than that of the other surfaces. Longer special surfaces can be detected.
- the switch 730may change the operation mode.
- the control unit 710may control the switch 730 to switch the switch 730 from the first operation mode to the second operation mode. .
- the fixing unit 790may be mounted on the surface of the electronic device 1000 so that the rotating unit 760 and the sensor 720 can search a surrounding area of the electronic device 1000 while rotating. and may include surfaces 780 having different characteristics that can be detected by the detection unit 770 .
- FIG. 8illustrates an example of a sensor 820 operating in a first operation mode and a second operation mode according to an embodiment.
- Reference numerals 810 and 820 of FIG. 8illustrate an example of the sensor 720, the detection unit 770, and the rotation unit 760 shown in FIG. 7 as viewed from the top down.
- reference numeral 830 of FIG. 8illustrates an example of operation modes of the signal 831 detected by the detection unit 811 and the sensor 720 according to rotation.
- the senor 720 and the detection unit 770may rotate counterclockwise in a circular shape having a radius of R by the rotation of the rotating unit 760 .
- the detection unit 770may operate in the second operation mode. is mounted in a position preceding the sensor 720 in the rotating unit 760 , and may rotate together with the sensor 720 .
- the detector 770detects the special surface 811
- the sensor 720passes the special surface 811 as shown in 820
- the second mode of operationis switched from the first mode of operation. can operate as
- the signal detected by the detector 770may be obtained in the form of a pulse signal, such as the signal 831 shown in 830 .
- 0 in the pulse signalmay correspond to a dark surface of the surface of the fixing unit 790
- 1may correspond to a bright surface.
- the special surface 811 for switching the operation mode of the sensor 720may correspond to a section 832 or 833, which is longer than other pulse sections.
- the detection unit 770detects the 811 surface, which is longer than the other surfaces, at the time when the 832 or 833 section ends, the sensor 720, the 832 or 833 From the point in time when the section ends, the operation may be switched from the first operation mode to the second operation mode.
- the sensor 720according to an embodiment operates in the second operation mode during the time taken for the detection unit 770 to detect the special surface 811 , that is, during the time period equal to the 832 or 833 period. and, thereafter, may be switched back to the first operation mode and operated.
- FIG. 9is a diagram illustrating an example of a signal detected by the sensor 720 according to an embodiment.
- reference numeral 920denotes an example of signals used to recognize an object among signals detected by the sensor 720
- reference numeral 930denotes a peripheral area among signals detected by the sensor 720 .
- the horizontal axiscorresponds to the rotation angle of the sensor 720, which is rotated from -180 to 180 degrees in the horizontal plane
- the vertical axiscorresponds to the signal strength (dB).
- signals used to recognize an objectmay be detected. Also, referring to 930 , signals used to generate map data may be sensed in a section operating in the first operation mode.
- the section 910 operated in the second operation modemay include greater noise than the remaining sections due to interference with signals used to recognize an object.
- signals of -20 dB or lessinclude noise generated due to interference, and thus may not be used to generate map data.
- 10, 11, and 12are diagrams illustrating an example of a signal obtained by a sensor operating in a first operation mode according to an embodiment.
- Sensor signalsmay be received through the antenna of the first aperture.
- the reflection signals for the plurality of first sensor signalsare received, in some section, according to the second operation mode, as the plurality of second sensor signals are emitted , a portion of the first sensor signals received through the antenna of the first aperture may be distorted by the second sensor signals.
- the first sensor signals received through the antenna of the first openingare distorted at -23 dB or less. may include.
- the first sensor signals received through the antenna of the first openingmay include a distorted portion according to the state of the surrounding environment to which the sensor signals are radiated.
- the first sensor signals received through the antenna of the first openingare -16dB.
- a distorted portionmay be included.
- the first sensor signals received through the antenna of the first openingin addition to the distorted portion according to the state of the surrounding environment to which the sensor signals are radiated, due to the interference phenomenon by the second sensor signals, It may contain distortions greater than 1010.
- the first sensor signals received through the antenna of the first openingare -12 dB.
- a distorted portionmay be included.
- the first sensor signals received through the antenna of the first openingin addition to the distorted portion according to the state of the surrounding environment to which the sensor signals are radiated, due to the interference phenomenon by the second sensor signals, It may contain distortions greater than 1020.
- FIG. 13 and 14are diagrams illustrating an example of searching a second surrounding area in a second operation mode according to an embodiment.
- the sensor of the electronic device 1000performs at least one of a first operation mode and a second operation mode while rotating, thereby providing a first peripheral area and a second operation mode. You can explore the surrounding area.
- the sensor of the electronic device 1000operates according to the second operation mode in the rotation sections 1113 and 1114 , so that the sensor signals 1111 and 1112 are radiated to the second periphery. area can be explored.
- a vertically wider peripheral region of the electronic device 1000may be searched.
- the sensor of the electronic device 1000operates according to the second operation mode at the rotation points 1124 , 1125 , and 1126 , so that the sensor signals 1121 , 1122 , and 1123 are radiated. , the second surrounding area may be searched.
- the sensor signals emitted from 1120may be signals emitted from at least one sensor signal at one rotation point rather than a rotation section. Accordingly, according to the embodiment of 1120 , the second surrounding area may be searched according to a smaller number of sensor signals.
- 15is a diagram illustrating an example of detecting a state of an object according to an embodiment.
- the electronic device 1000may search for a first peripheral region and a second peripheral region 1201 using a sensor.
- the electronic device 1000may further sense the state of the object as well as the presence of the object located in the second peripheral area 1201 .
- the state of the objectmay include various states related to the movement of the object, such as a movement state, heart rate, and respiration rate.
- the reflected signals of the human hand detected by the sensorare displayed as shown in 1205 . can be obtained.
- a motion of a human handmay be detected based on the Doppler effect. For example, when the human hand moves away from the sensor, low frequency reflection signals 1203 may be detected at the sensor, but when the human hand moves closer to the sensor, high frequency reflection signals 1204 are detected. ) can be detected by the sensor.
- the sensormay also acquire information about the heart rate or respiration rate of the object by detecting the external movement of the object.
- the electronic device 1000may detect the movement of the object by applying a fourth transform function (FFT) to the sensor signal reflected from the chest region of the object.
- FFTfourth transform function
- the sensor signal emitted by the sensoris a faster rotational speed (ex. per second) than the frequency (ex. 0.2 to 2Hz) of the heart rate or respiration rate so as to obtain information about the heart rate or respiration rate 50 times), and can be spun.
- the sensor according to an embodimentis not limited to the above-described example, and according to various methods, the sensor may acquire information about the movement as well as the position of an object existing around the electronic device 1000 .
- various areas aroundmay be searched for by radiating a sensor signal through an antenna having an opening having a different size according to a direction the sensor faces.
- the device-readable storage mediummay be provided in the form of a non-transitory storage medium.
- 'non-transitory storage medium'is a tangible device and only means that it does not contain a signal (eg, electromagnetic wave), and this term refers to cases in which data is semi-permanently stored in a storage medium and temporary It does not distinguish the case where it is stored as
- the 'non-transitory storage medium'may include a buffer in which data is temporarily stored.
- the method according to various embodiments disclosed in this documentmay be provided as included in a computer program product.
- Computer program productsmay be traded between sellers and buyers as commodities.
- the computer program productis distributed in the form of a device-readable storage medium (eg compact disc read only memory (CD-ROM)), or through an application store (eg Play StoreTM) or on two user devices ( It can be distributed (eg downloaded or uploaded) directly, online between smartphones (eg: smartphones).
- a portion of the computer program producteg, a downloadable app
- a machine-readable storage mediumsuch as a memory of a manufacturer's server, a server of an application store, or a relay server. It may be temporarily stored or temporarily created.
- unitmay be a hardware component such as a processor or circuit, and/or a software component executed by a hardware component such as a processor.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Computer Networks & Wireless Communication (AREA)
- Life Sciences & Earth Sciences (AREA)
- Automation & Control Theory (AREA)
- Aviation & Aerospace Engineering (AREA)
- Environmental & Geological Engineering (AREA)
- Geology (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Geophysics (AREA)
- Acoustics & Sound (AREA)
- Radar Systems Or Details Thereof (AREA)
Abstract
Description
Translated fromKorean본 개시는, 주변 환경을 탐색하는 전자 장치 및 그 동작 방법에 관한 것이다.The present disclosure relates to an electronic device searching for a surrounding environment and an operating method thereof.
주변 환경을 탐색하는 센서는, 다양한 이동 기기에 장착되어, 이동 기기가 스스로 이동 루트를 결정할 수 있도록, 주변 환경의 탐색 결과를 이동 기기에 제공할 수 있다. 예를 들면, 센서(ex. 레이더 센서, 라이더 센서)에 의해 획득된 주변 환경에 관한 정보에 기초하여, 이동 기기(ex. 로봇 청소기, 배달 로봇, 차량)는 자신의 주변 환경에 관한 맵을 작성하거나, 주변 환경에 위치한 객체를 탐지함으로써, 스스로 이동 루트를 결정할 수 있다.The sensor for searching the surrounding environment may be installed in various mobile devices to provide the mobile device with a search result of the surrounding environment so that the mobile device can determine a moving route by itself. For example, based on the information about the surrounding environment obtained by the sensor (eg, radar sensor, lidar sensor), the mobile device (eg, robot vacuum cleaner, delivery robot, vehicle) creates a map about its surrounding environment Alternatively, by detecting an object located in the surrounding environment, the moving route may be determined by itself.
이동 기기는 주변 환경을 탐색하는 센서를 이용하여, 주변의 다양한 영역에 대한 탐색 결과를 획득할 수 있는데, 센서 신호가 방사될 때의 센서 상태에 따라, 서로 다른 영역에 대한 탐색 결과가 획득될 수 있다.The mobile device may obtain search results for various areas around it by using a sensor that searches the surrounding environment. Depending on the sensor state when the sensor signal is emitted, search results for different areas may be obtained. have.
주변 환경을 탐색하는 센서를 이용하여, 이동 기기의 주변 환경을 탐색하기 위한 더욱 효율적인 방법을 제안하고자 한다.An object of the present invention is to propose a more efficient method for searching the surrounding environment of a mobile device by using a sensor for searching the surrounding environment.
본 개시가 해결하고자 하는 과제는 전술한 문제를 해결하기 위한 것으로서, 주변 환경을 탐색하는 전자 장치 및 그 동작 방법을 제공하기 위한 것이다.SUMMARY OF THE INVENTION An object of the present disclosure is to solve the above-described problem, and to provide an electronic device for searching a surrounding environment and an operating method thereof.
또한, 상기 방법을 컴퓨터에서 실행시키기 위한 프로그램을 기록한 컴퓨터로 읽을 수 있는 기록매체를 제공하는 데 있다. 해결하려는 기술적 과제는 상기된 바와 같은 기술적 과제들로 한정되지 않으며, 또 다른 기술적 과제들이 존재할 수 있다.Another object of the present invention is to provide a computer-readable recording medium in which a program for executing the method in a computer is recorded. The technical problem to be solved is not limited to the technical problems as described above, and other technical problems may exist.
도 1은 일 실시 예에 의한 주변 환경을 탐색하는 일 예를 나타낸 도면이다.1 is a diagram illustrating an example of searching a surrounding environment according to an embodiment.
도 2는 일 실시 예에 의한 복수의 센서 신호들이 방사될 수 있는 방향 범위의 일 예를 나타낸 도면이다.2 is a diagram illustrating an example of a direction range in which a plurality of sensor signals may be radiated according to an embodiment.
도 3은 일 실시 예에 의한 복수의 센서 신호들을 방사하는 전자 장치를 위에서 내려다 본 모습의 일 예를 나타낸 도면이다.3 is a diagram illustrating an example of a top down view of an electronic device emitting a plurality of sensor signals according to an embodiment.
도 4는 일 실시 예에 의한 전자 장치의 내부 구성을 설명하기 위한 블록도이다.4 is a block diagram illustrating an internal configuration of an electronic device according to an exemplary embodiment.
도 5는 일 실시 예에 의한 전자 장치의 내부 구성을 설명하기 위한 블록도이다.5 is a block diagram illustrating an internal configuration of an electronic device according to an exemplary embodiment.
도 6은 일 실시 예에 의한 주변 환경을 탐색하는 방법을 나타낸 순서도이다.6 is a flowchart illustrating a method of searching for a surrounding environment according to an exemplary embodiment.
도 7을 일 실시 예에 따른 전자 장치에 구비된 센서의 일 예를 나타낸 것이다.7 illustrates an example of a sensor provided in an electronic device according to an embodiment.
도 8은 일 실시 예에 의한 제1 동작 모드 및 제2 동작 모드로 동작하는 센서의 일 예를 도시한 것이다.8 illustrates an example of a sensor operating in a first operation mode and a second operation mode according to an embodiment.
도 9는 일 실시 예에 의한 센서에 의해 감지되는 신호의 일 예를 나타낸 도면이다.9 is a diagram illustrating an example of a signal detected by a sensor according to an embodiment.
도 10, 도 11 및 도 12는 일 실시 예에 의한 제1 동작 모드로 동작하는 센서에 의해 획득된 신호의 일 예를 나타낸 도면이다.10, 11, and 12 are diagrams illustrating an example of a signal obtained by a sensor operating in a first operation mode according to an embodiment.
도 13, 및 도 14는 일 실시 예에 의한 제2 동작 모드로 제2 주변 영역을 탐색하는 일 예를 나타낸 도면이다.13 and 14 are diagrams illustrating an example of searching a second surrounding area in a second operation mode according to an embodiment.
도 15는 일 실시 예에 의한 대상체의 상태를 감지하는 일 예를 나타낸 도면이다.15 is a diagram illustrating an example of detecting a state of an object according to an embodiment.
상술한 기술적 과제를 달성하기 위한 기술적 수단으로서, 본 개시의 제1 측면은, 전자 장치에서 주변 환경을 탐색하는 방법에 있어서, 주변 환경 탐색을 위한 센서가 제1 방향 범위에 속한 방향으로, 복수의 센서 신호를 방사할 수 있는 경우, 제1 개구의 안테나를 통해, 상기 복수의 센서 신호들을 방사하는 단계; 상기 제1 개구의 안테나를 통해 방사된 복수의 센서 신호들에 대한 반사 신호들에 기초하여, 제1 주변 영역을 탐색하는 단계; 상기 센서가, 제2 방향 범위에 속한 방향으로, 복수의 센서 신호를 방사할 수 있는 경우, 제2 개구의 안테나를 통해, 상기 복수의 센서 신호들을 방사하는 단계; 및 상기 제2 개구를 통해 방사된 복수의 센서 신호들에 대한 반사 신호들에 기초하여, 제2 주변 영역을 탐색하는 단계를 포함하는, 방법을 제공할 수 있다. As a technical means for achieving the above-described technical problem, a first aspect of the present disclosure provides a method for searching a surrounding environment in an electronic device, in which a sensor for searching the surrounding environment is included in a first direction range, and a plurality of radiating the plurality of sensor signals through the antenna of the first opening when the sensor signals can be radiated; searching for a first peripheral area based on reflection signals of a plurality of sensor signals radiated through the antenna of the first opening; radiating the plurality of sensor signals through an antenna of a second opening when the sensor can radiate a plurality of sensor signals in a direction belonging to a second direction range; and searching for a second peripheral area based on reflection signals of a plurality of sensor signals radiated through the second opening.
또한, 본 개시의 제2 측면은, 주변 환경을 탐색하는 전자 장치에 있어서, 제1 방향 범위에 속한 방향으로, 복수의 센서 신호를 방사할 수 있는 경우, 제1 개구(aperture)의 안테나를 통해, 상기 복수의 센서 신호들을 방사하고, 제2 방향 범위에 속한 방향으로, 복수의 센서 신호를 방사할 수 있는 경우, 제2 개구의 안테나를 통해, 상기 복수의 센서 신호들을 방사하는 센싱부; 및 상기 제1 개구의 안테나를 통해 방사된 복수의 센서 신호들에 대한 반사 신호들에 기초하여, 제1 주변 영역을 탐색하고, 상기 제2 개구를 통해 방사된 복수의 센서 신호들에 대한 반사 신호들에 기초하여, 제2 주변 영역을 탐색하는 적어도 하나의 프로세서를 포함하는, 전자 장치를 제공할 수 있다. In addition, according to a second aspect of the present disclosure, when a plurality of sensor signals can be radiated in a direction belonging to a first direction range in an electronic device for searching a surrounding environment, through an antenna of a first aperture , a sensing unit that radiates the plurality of sensor signals and radiates the plurality of sensor signals through an antenna of a second opening when the plurality of sensor signals can be radiated in a direction belonging to a second direction range; and based on the reflected signals for the plurality of sensor signals radiated through the antenna of the first opening, the first peripheral region is searched for, and the reflected signal for the plurality of sensor signals radiated through the second opening An electronic device that includes at least one processor that searches for a second peripheral area based on the data may be provided.
또한, 본 개시의 제3 측면은, 제1 측면의 방법을 수행하도록 하는 프로그램이 저장된 기록매체를 제공할 수 있다.In addition, a third aspect of the present disclosure may provide a recording medium in which a program for performing the method of the first aspect is stored.
아래에서는 첨부한 도면을 참조하여 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자가 용이하게 실시할 수 있도록 본 발명의 실시예를 상세히 설명한다. 그러나 본 발명은 여러 가지 상이한 형태로 구현될 수 있으며 여기에서 설명하는 실시예에 한정되지 않는다. 그리고 도면에서 본 발명을 명확하게 설명하기 위해서 설명과 관계없는 부분은 생략하였으며, 명세서 전체를 통하여 유사한 부분에 대해서는 유사한 도면 부호를 붙였다.DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTS Hereinafter, embodiments of the present invention will be described in detail with reference to the accompanying drawings so that those of ordinary skill in the art can easily implement them. However, the present invention may be embodied in many different forms and is not limited to the embodiments described herein. And in order to clearly explain the present invention in the drawings, parts irrelevant to the description are omitted, and similar reference numerals are attached to similar parts throughout the specification.
명세서 전체에서, 어떤 부분이 다른 부분과 "연결"되어 있다고 할 때, 이는 "직접적으로 연결"되어 있는 경우뿐 아니라, 그 중간에 다른 소자를 사이에 두고 "전기적으로 연결"되어 있는 경우도 포함한다. 또한 어떤 부분이 어떤 구성요소를 "포함"한다고 할 때, 이는 특별히 반대되는 기재가 없는 한 다른 구성요소를 제외하는 것이 아니라 다른 구성요소를 더 포함할 수 있는 것을 의미한다.Throughout the specification, when a part is "connected" with another part, this includes not only the case of being "directly connected" but also the case of being "electrically connected" with another element interposed therebetween. . In addition, when a part "includes" a certain component, this means that other components may be further included rather than excluding other components unless otherwise stated.
이하 첨부된 도면을 참고하여 본 발명을 상세히 설명하기로 한다.Hereinafter, the present invention will be described in detail with reference to the accompanying drawings.
도 1은 일 실시 예에 의한 주변 환경을 탐색하는 일 예를 나타낸 도면이다.1 is a diagram illustrating an example of searching a surrounding environment according to an embodiment.
도 1을 참조하면, 일 실시 예에 의한 전자 장치(1000)는, 주변 환경을 탐색하기 위한 센서(100)를 통해, 센서 신호를 방사함으로써, 제1 주변 영역(110) 및 제2 주변 영역(120)을 탐색할 수 있다.Referring to FIG. 1 , an
일 실시예에 따른 전자 장치(1000)는 다양한 형태로 구현될 수 있다. 예를 들어, 본 명세서에서 기술되는 전자 장치(1000)는, 이동 가능한 장치로서, 배달 로봇, 로봇 청소기, 차량(vehicle) 등이 있을 수 있으나, 이에 한정되는 것은 아니다.The
일 실시 예에 의한 전자 장치(1000)는, 주변 환경을 탐색한 결과에 기초하여, 주변 환경에 대한 지도 데이터를 생성하거나, 주변 환경에 존재하는 다양한 종류의 객체들을 인식(detect)할 수 있다. 따라서, 전자 장치(1000)는, 지도 데이터의 생성 결과와 객체 인식 결과에 따라서, 전자 장치(1000)의 이동 경로를 결정하고, 결정된 이동 경로에 따라서 이동할 수 있다.The
일 실시 예에 의한 센서(100)는, 소정 크기의 개구(aperture)을 통하여, 복수의 센서 신호들을 방사할 수 있다.The
예를 들면, 센서(100)에 구비된 소정 크기의 개구를 가진 안테나를 통해 복수의 센서 신호들이 방사될 수 있다. 일 실시 예에 의한 센서(100)는, 서로 다른 크기의 개구를 가진 복수 개의 안테나를 이용하여, 복수의 센서 신호들을 방사하고, 상기 방사된 신호들의 반사된 신호들에 기초하여, 영상 데이터를 생성함으로써, 주변 환경을 탐색할 수 있다. 예를 들면, 전자 장치(1000)는, 주변 환경을 포함하는 영상 데이터에 기초하여, 주변 환경에 대한 지도 데이터를 생성하거나, 주변 환경에 존재하는 객체를 인식할 수 있다.For example, a plurality of sensor signals may be radiated through an antenna having an opening of a predetermined size provided in the
일 실시 예에 의한 센서(100)는, 센서 신호로서, 전파 신호들을 방사함으로써, 주변 환경을 포함하는 영상 데이터를 생성할 수 있는 레이더 센서일 수 있다. 또한, 센서(100)는, 센서 신호로서, 레이저 또는 빛을 방사함으로써, 주변 환경을 포함하는 영상 데이터를 생성할 수 있는 라이더 센서, 이미지 센서 등일 수 있다.The
상술한 예에 한하지 않고 일 실시 예에 의한 센서(100)는 주변 환경을 탐색할 수 있는 다양한 종류의 센서일 수 있다.The
일 실시 예에 의하면, 개구의 크기, 즉, 면적이 넓을수록, 방사되는 센서 신호들의 지향성(directivity)이 커짐에 따라서, 더 먼 거리의 주변 환경(111, 113)이 탐색될 수 있으나, 수직면에서, 더 좁은 범위의 주변 환경(112)이 탐색될 수 있다. 반면, 안테나의 개구의 면적이 좁을수록, 방사되는 센서 신호들의 지향성은 작아짐에 따라, 더 가까운 거리의 주변 환경이 탐색될 수 있으나, 수직면에서 더 넓은 범위의 주변 환경(121)이 탐색될 수 있다.According to an embodiment, as the size of the opening, that is, the larger the area, the greater the directivity of the emitted sensor signals, the more distant the surrounding
일 실시 예에 의한 센서(100)는, 주변 환경을 탐색하기 위한 복수의 센서 신호를 다양한 방향으로 방사할 수 있다. 예를 들면, 센서(100)는, 수평면 상에서, 회전하면서, 수평면과 수평한 방향으로 복수의 센서 신호들을 방사할 수 있으나, 이에 한하지 않고, 수평면을 포함한, 전방향(omnidirentional)으로 회전하면서, 다양한 방향으로, 복수의 센서 신호들을 방사할 수도 있다.The
일 실시 예에 의한 센서(100)는, 복수의 센서 신호들이 방사될 수 있는 다양한 방향 범위들 중에서, 제1 방향 범위에 속하는 방향으로 센서 신호들을 방사할 수 있는 경우에는, 제1 개구의 안테나를 이용하여, 복수의 센서 신호들을 방사할 수 있다. 예를 들어, 센서(100)가 수평면 상에서 360도로 회전하면서, 복수의 센서 신호들을 방사하는 경우, 360도 방향 범위 중에서, 센서(100)가 제1 방향 범위에 존재하는 동안에는, 제1 개구의 안테나를 통하여, 복수의 센서 신호들을 방사할 수 있다.The
마찬가지로, 일 실시 예에 의한, 센서(100)가, 제1 방향 범위 이외에, 제2 방향 범위에 속하는 방향으로, 제2 개구의 안테나를 통하여, 복수의 센서 신호들을 방사할 수 있다. 예를 들어, 센서(100)가 360도 방향 범위 중에서, 제2 방향 범위에 속하는 방향을 향하는 경우, 제2 개구의 안테나를 통하여, 복수의 센서 신호들을 방사할 수 있다.Similarly, according to an embodiment, the
일 실시 예에 의하면, 센서(100)가 제2 방향 범위에 속하는 방향으로, 제2 개구의 안테나와 함께, 제1 개구의 안테나를 통하여도 복수의 센서 신호들을 방사함으로써, 제1 주변 영역 및 제2 주변 영역이 함께 탐색될 수 있다. 따라서, 일 실시 예에 의한 센서(100)가 제1 방향 범위에 존재하는 경우, 제1 개구의 안테나를 통해 복수의 센서 신호들을 방사할 수 있고, 제2 방향 범위에 존재하는 경우, 제1 개구의 안테나 및 제2 개구의 안테나를 모두 이용하여, 복수의 센서 신호들을 방사할 수 있다.According to an embodiment, the
일 실시 예에 따라, 제2 방향 범위에서, 제1 주변 영역 및 제2 주변 영역이 함께 탐색될 수 있도록, 센서 신호들이 방사되는 경우, 제1 주변 영역 탐색을 위한 센서 신호는 아래 수학식 1에 따라서 FFT(Fast Fourier Transform)에 기초하여, 결정될 수 있다.According to an embodiment, when the sensor signals are radiated so that the first peripheral area and the second surrounding area can be searched together in the second direction range, the sensor signal for searching the first surrounding area is expressed in

수학식 1에서,

상술한 예에 한하지 않고, 일 실시 예에 의한 센서 신호들은 다양한 방법에 따라서, 획득될 수 있다.Not limited to the above-described example, the sensor signals according to an embodiment may be acquired according to various methods.
따라서, 일 실시 예에 의한 센서(100)는, 센서(100)가 향하는 방향 범위에 따라서, 서로 다른 개구의 안테나를 이용하여, 복수의 센서 신호들을 방사할 수 있다. 서로 다른 개구의 안테나를 통해 복수의 센서 신호들이 방사됨에 따라서, 일 실시 예에 의한 전자 장치(1000)는, 다양한 방향으로 회전하는 하나의 센서를 이용하여, 서로 다른 주변 영역을 탐색할 수 있다.Accordingly, the
상술한 예에 한하지 않고, 센서(100)는, 여러 가지 크기의 개구를 가진 안테나를 통하여, 서로 다른 방향 범위에 속하는 방향으로, 복수의 센서 신호들을 방사할 수 있다.Without being limited to the above-described example, the
일 실시 예에 의한 센서(100)는, 일정한 주기로, 수평면 상에서, 회전하면서, 서로 다른 개구의 복수의 안테나를 이용하여, 복수의 센서 신호들을 방사할 수 있다. 일 실시 예에 의하면, 센서(100)의 회전 주기에 기초하여, 센서(100)가 향하는 방향 범위가 결정될 수 있다.The
예를 들어, 센서(100)의 회전 주기가 T인 경우, n*T-10ms 내지 n*T+10ms (n은 0이상의 상수값)사이의 시간 구간에서는, 제2 개구의 안테나를 통해 복수의 센서 신호들이 방사될 수 있다. 또한, n*T-10ms 내지 n*T+10ms 사이의 시간 구간을 제외한 나머지 시간 구간, 즉, n*T+10ms 내지 (n+1)*T-10ms 사이의 시간 구간에서는, 제2 개구의 안테나를 통해 복수의 센서 신호들이 방사될 수 있다.For example, when the rotation period of the
일 실시 예에 의한 센서(100)는, 제2 방향 범위에서 센서 신호들을 방사할 수 있는 경우에, 제2 개구의 안테나뿐만 아니라, 제1 개구의 안테나를 함께 이용하여 센서 신호들을 방사할 수 있다. 일 실시 예에 따라, 제2 개구의 안테나를 통해 방사된 센서 신호들에 의해 탐색되는 영역은, 제1 개구의 안테나를 이용하여 방사되는 센서 신호들에 의해 탐색되는 영역보다 수직으로 더 넓은 영역을 포함할 수 있다. 따라서, 동일한 크기의 범위 내에서, 제1 개구의 안테나를 통해 센서 신호들이 방사되는 횟수보다 더 적은 횟수로 제2 개구의 안테나를 통해 센서 신호들이 방사되어도, 각 센서 신호들에 의해 탐색되는 영역들 간 서로 겹치는 영역이 최소화되도록, 센서 신호들이 방사될 수 있다.When the
예를 들면, 제2 방향 범위에서, 센서(100)는, 제1 개구의 안테나와, 제2 개구의 안테나를 교대로 이용하여, 센서 신호들을 방사할 수 있다. 일 실시 예에 의하면, 센서(100)가 제2 방향 범위에서, 총 a번의 센서 신호를 방사하는 동작을 수행할 때, 제2 개구의 안테나를 통한 센서 신호의 방사 동작은, 소정 간격(ex. 3의 배수 간격)으로 b번(b는 a보다 작은 상수값) 수행될 수 있다. 또한, 제1 개구의 안테나를 통한 센서 신호의 방사 동작은, 제2 방향 범위에서, a-b번 수행될 수 있다.For example, in the second directional range, the
예를 들어, 센서(100)가 1회 회전하는 동안, N번의 센서 신호의 방사 동작이 수행되는 경우, 1번째부터 M(M은 N보다 작은 상수값)번째까지는, 3의 배수 간격(ex. 1, 3, 6, 9 … 번째)으로, 제2 개구의 안테나를 통한, 센서 신호의 방사 동작이 수행될 수 있다. 또한, 나머지 2, 3, 4, 5, 7, 8 …번째에서는 제1 개구의 안테나를 통한, 센서 신호의 방사 동작이 수행될 수 있다. 또한, M+1 번째부터, N번째까지 제1 개구의 안테나를 통한, 센서 신호의 방사 동작이 수행될 수 있다.For example, when the radiation operation of the sensor signal is performed N times while the
일 실시 예에 의한 전자 장치(1000)가 도 1에 도시된 바와 같이 이동하면서, 제2 주변 영역이 탐색된 결과에 따라, 정지할 수 있도록, 전자 장치(1000)의 이동 속도에 기초하여, 센서의 회전 속도의 범위가 결정될 수 있다. 예를 들어, 전자 장치(1000)가 30cm/초의 이동 속도에서, 전자 장치(1000)의 이동을 제어하기 위한 신호가 출력되는 순간으로부터 전자 장치(1000)가 정지할 때까지의 이동 거리 및 걸린 시간이 각각 5cm, 1/6초인 경우를 가정한다. 이 경우, 센서의 회전 속도는, 1회 회전 당 1/6초 이상의 속도여야 한다.Based on the moving speed of the
또한, 일 실시 예에 의한 센서에 의해 방사되는 센서 신호의 파장(λ)은, 회전으로 인한 왜곡을 최소화할 수 있도록, 2πR/N< λ/3 (R은 회전 반지름, N은 1회당 측정 개수)의 값으로 결정될 수 있다. 상술한 예에 한하지 않고, 센서 신호의 주파수는, 다양한 방법으로 결정될 수 있다.In addition, the wavelength (λ) of the sensor signal emitted by the sensor according to an embodiment is 2πR/N < λ/3 (R is the rotation radius, N is the number of measurements per time to minimize distortion due to rotation) ) can be determined by Without being limited to the above-described example, the frequency of the sensor signal may be determined in various ways.
도 2는 일 실시 예에 의한 복수의 센서 신호들이 방사될 수 있는 방향 범위의 일 예를 나타낸 도면이다.2 is a diagram illustrating an example of a direction range in which a plurality of sensor signals may be radiated according to an embodiment.
도 2를 참조하면, 210은, 복수의 센서 신호들이 방사될 수 있는 방향 범위의 일 예를 나타낸 것이다. 210에 도시된 각각의 원들은, 센서(100)를 위에서 내려다 볼 때, 센서(100)가 수평면 상에서 반지름 R 크기의 원으로 회전함에 따라, 서로 다른 시점에서의 센서(100)의 위치와 대응된다.Referring to FIG. 2 ,
220은, 일 실시 예에 의한, 복수의 센서 신호들을 방사하는 센서(100)를 포함한 전자 장치(1000)를 측면에서 본 모습의, 일 예를 나타낸 것이다.Reference numeral 220 illustrates an example of the
일 실시 예에 의한 전자 장치(1000)가 오른쪽 방향으로 이동할 때, 센서(100)는, 수평면 상에서 반지름 R 크기의 원모양으로 회전하면서, 복수의 센서 신호들을 방사함으로써, 주변 환경을 탐색할 수 있다.When the
일 실시 예에 의한 센서(100)가 360도의 범위들 중에서 212의 범위를 제외한, 211 의 범위에 존재할 때는, 제1 개구의 안테나(213)를 통해 복수의 센서 신호들이 방사될 수 있다. 따라서, 센서(100)가 211 의 범위에 존재할 때, 센서(100)에 의해 탐색된 주변 환경은, 상대적으로 더 먼 거리의 영역도 포함할 수 있으나, 수직면에서, 더 좁은 범위의 영역을 포함할 수 있다. 예를 들면, 센서(100)에 의해 탐색된 주변 환경은, 수직면에서, 더 좁은 범위의 영역을 포함함에 따라, 센서(100)보다 더 낮거나 높은 위치에 존재하는 객체는, 센서(100)에 의해 탐색된 주변 환경(215)에 포함되지 않을 수 있다.When the
또한, 일 실시 예에 의한 전자 장치(1000)에 구비된 센서(100)가 212 의 범위에 존재할 때는, 제2 개구의 안테나(214)를 통해 복수의 센서 신호들이 방사될 수 있다. 따라서, 센서(100)가 212 의 범위에 존재할 때, 센서(100)에 의해 탐색된 주변 환경은, 상대적으로 더 가까운 거리의 영역을 포함할 수 있으나, 수직면에서, 더 넓은 범위의 영역을 포함할 수 있다. 예를 들면, 센서(100)에 의해 탐색된 주변 환경은, 수직면에서, 더 넓은 범위의 영역을 포함함에 따라, 센서(100)보다 더 낮거나 높은 위치에 존재하는 객체도, 센서(100)에 의해 탐색된 주변 환경(216)에 포함될 수 있다.Also, when the
또한, 일 실시 예에 의하면, 센서(100)가 212의 범위에 존재할 때, 제2 개구의 안테나(214)뿐만 아니라, 제1 개구의 안테나(213)를 함께 이용하여, 복수의 센서 신호들이 방사됨으로써, 주변 영역이 탐색될 수 있다. 예를 들어, 212의 범위에서, 복수의 센서 신호들이 n번 방사되는 경우, 제2 개구의 안테나(214)를 통해, 소정 간격으로 센서 신호들이 m번 방사될 수 있다. 또한, 제1 개구의 안테나(213)를 통해, 나머지 범위에서, 센서 신호들이 n-m번 방사될 수 있다.In addition, according to an embodiment, when the
도 3은 일 실시 예에 의한 복수의 센서 신호들을 방사하는 전자 장치(1000)를 위에서 내려다 본 모습의 일 예를 나타낸 도면이다.3 is a diagram illustrating an example of a top down view of the
도 3에 도시된 전자 장치(1000)는, 도 1에 도시된 전자 장치(1000)의 측면을 본 모습을 도시한 것과 대응된다.The
도 3을 참조하면, 전자 장치(1000)는, 오른쪽 방향으로 이동할 때, 센서(100)는, 수평면 상에서 소정 크기의 반지름을 가진 원모양으로 회전하면서, 복수의 센서 신호를 방사함으로써, 주변 환경을 탐색할 수 있다.Referring to FIG. 3 , when the
일 실시 예에 의한 센서(100)가 도 2의 도시된 211의 범위에 존재할 때는, 제1 개구의 안테나(213)를 통해 복수의 센서 신호들(315)이 방사됨에 따라서, 310 영역에 속하는 객체들(311, 313)이 검출될 수 있다.When the
일 실시 예에 의한 센서(100)가 360도의 범위들 중에서 도 2의 도시된 212의 범위에 존재할 때는, 제2 개구의 안테나(214)를 통해 복수의 센서 신호들(322)이 방사됨에 따라서, 320 영역에 속하는 객체들이 검출될 수 있다.When the
또한, 센서(100)는, 212의 범위에서, 동일 시간 간격으로, 센서 신호들을 n번 방사하는 경우, 소정 간격으로 제2 개구의 안테나(214)를 통해 복수의 센서 신호들(322)을 m번 방사하면서, 나머지 구간, 즉, 제2 개구의 안테나(214)로 센서 신호가 방사되는 두 시점 사이의 구간에서, 제1 개구의 안테나(213)를 통해 복수의 센서 신호들(322)을 n-m번 방사할 수 있다.In addition, the
도 3에 도시된 312 및 321은, 각각 도 1에 도시된 112 및 121과 대응된다. 312는, 제1 개구의 안테나(213)를 통해 탐색될 수 있는 영역과 대응된다. 또한, 321은, 제2 개구의 안테나(214)를 통해서는 탐색될 수 있으나, 제1 개구의 안테나(213)를 통해서는 탐색되지 않는 영역과 대응된다.312 and 321 illustrated in FIG. 3 correspond to 112 and 121 illustrated in FIG. 1 , respectively. 312 corresponds to an area that can be searched through the
도 4는 일 실시 예에 의한 전자 장치(1000)의 내부 구성을 설명하기 위한 블록도이다.4 is a block diagram illustrating an internal configuration of the
도 5는 일 실시 예에 의한 전자 장치(1000)의 내부 구성을 설명하기 위한 블록도이다.5 is a block diagram illustrating an internal configuration of the
도 4를 참조하면, 전자 장치(1000)는, 프로세서(1300) 및 센싱부(1400)를 포함할 수 있다. 그러나, 도 4에 도시된 구성 요소 모두가 전자 장치(1000)의 필수 구성 요소인 것은 아니다. 도 4에 도시된 구성 요소보다 많은 구성 요소에 의해 전자 장치(1000)가 구현될 수도 있고, 도 4에 도시된 구성 요소보다 적은 구성 요소에 의해 전자 장치(1000)가 구현될 수도 있다.Referring to FIG. 4 , the
예를 들면, 전자 장치(1000)는 도 5에 도시된 바와 같이, 일 실시예에 따른 전자 장치(1000)는, 프로세서(1300) 및 센싱부(1400) 이외에 사용자 입력부(1100), 출력부(1200), 통신부(1500), A/V 입력부(1600) 및 메모리(1700)를 더 포함할 수도 있다.For example, as shown in FIG. 5 , the
사용자 입력부(1100)는, 사용자가 전자 장치(1000)를 제어하기 위한 데이터를 입력하는 수단을 의미한다. 예를 들어, 사용자 입력부(1100)에는 키 패드(key pad), 돔 스위치 (dome switch), 터치 패드(접촉식 정전 용량 방식, 압력식 저항막 방식, 적외선 감지 방식, 표면 초음파 전도 방식, 적분식 장력 측정 방식, 피에조 효과 방식 등), 조그 휠, 조그 스위치 등이 있을 수 있으나 이에 한정되는 것은 아니다.The
일 실시 예에 의하면, 사용자 입력부(1100)는, 전자 장치(1000)가 주변 환경 탐색을 수행하기 위한, 사용자 입력을 수신할 수 있다.According to an embodiment, the
출력부(1200)는, 오디오 신호 또는 비디오 신호 또는 진동 신호를 출력할 수 있으며, 출력부(1200)는 디스플레이부(1210), 음향 출력부(1220), 및 진동 모터(1230)를 포함할 수 있다.The
디스플레이부(1210)는 전자 장치(1000)에서 처리되는 정보를 표시 출력한다. 일 실시 예에 의하면, 디스플레이부(1210)는 주변 환경이 탐색된 결과에 관한 정보를 출력할 수 있다.The
한편, 디스플레이부(1210)와 터치패드가 레이어 구조를 이루어 터치 스크린으로 구성되는 경우, 디스플레이부(1210)는 출력 장치 이외에 입력 장치로도 사용될 수 있다. 디스플레이부(1210)는 액정 디스플레이(liquid crystal display), 박막 트랜지스터 액정 디스플레이(thin film transistor-liquid crystal display), 유기 발광 다이오드(organic light-emitting diode), 플렉시블 디스플레이(flexible display), 3차원 디스플레이(3D display), 전기영동 디스플레이(electrophoretic display) 중에서 적어도 하나를 포함할 수 있다. 그리고 전자 장치(1000)의 구현 형태에 따라 전자 장치(1000)는 디스플레이부(1210)를 2개 이상 포함할 수도 있다.On the other hand, when the
음향 출력부(1220)는 통신부(1500)로부터 수신되거나 메모리(1700)에 저장된 오디오 데이터를 출력한다. 일 실시 예에 의하면, 음향 출력부(1220)는 주변 환경이 탐색된 결과에 관한 정보를 출력할 수 있다.The
진동 모터(1230)는 진동 신호를 출력할 수 있다. 또한, 진동 모터(1230)는 터치스크린에 터치가 입력되는 경우 진동 신호를 출력할 수도 있다. 일 실시 예에 의하면, 진동 모터(1230)는 주변 환경이 탐색된 결과에 관한 정보를 출력할 수 있다.The
프로세서(1300)는, 통상적으로 전자 장치(1000)의 전반적인 동작을 제어한다. 예를 들어, 프로세서(1300)는, 메모리(1700)에 저장된 프로그램들을 실행함으로써, 사용자 입력부(1100), 출력부(1200), 센싱부(1400), 통신부(1500), A/V 입력부(1600) 등을 전반적으로 제어할 수 있다.The
전자 장치(1000)는 적어도 하나의 프로세서(1300)를 포함할 수 있다. 예를 들면, 전자 장치(1000)는 CPU(Central Processing Unit), GPU(Graphics Processing Unit), NPU(Neural Processing Unit) 등의 다양한 종류의 프로세서를 포함할 수 있다.The
프로세서(1300)는 기본적인 산술, 로직 및 입출력 연산을 수행함으로써, 컴퓨터 프로그램의 명령을 처리하도록 구성될 수 있다. 명령은 메모리(1700)로부터 프로세서(1300)에 제공되거나, 통신부(1500)를 통해 수신되어 프로세서(1300)로 제공될 수 있다. 예를 들면 프로세서(1300)는 메모리와 같은 기록 장치에 저장된 프로그램 코드에 따라 명령을 실행하도록 구성될 수 있다.The
일 실시 예에 의한 프로세서(1300)는 주변 환경 탐색을 위한 센서가 제1 방향 범위에 속한 방향으로, 복수의 센서 신호를 방사할 수 있는 경우, 제1 개구(aperture)의 안테나를 통해, 복수의 센서 신호들을 방사할 수 있다. 일 실시 예에 의한 프로세서(1300)는, 상기 방사된 복수의 센서 신호들에 대한 반사 신호들에 기초하여, 제1 주변 영역을 탐색할 수 있다.The
일 실시 예에 의한 프로세서(1300)는 주변 환경 탐색을 위한 센서가, 제2 방향 범위에 속한 방향으로, 복수의 센서 신호를 방사할 수 있는 경우, 제2 개구의 안테나를 통해, 복수의 센서 신호들을 방사할 수 있다. 일 실시 예에 의한 프로세서(1300)는, 상기 방사된 복수의 센서 신호들에 대한 반사 신호들에 기초하여, 제2 주변 영역을 탐색할 수 있다.The
따라서, 일 실시 예에 의한 프로세서(1300)는, 센서가 복수의 센서 신호들을 방사할 수 있는 방향 범위에 따라서, 서로 다른 크기의 개구를 포함하는 안테나들을 이용하여, 서로 다른 주변 영역들을 탐색할 수 있다.Accordingly, the
일 실시 예에 의한 제1 개구의 크기가 제2 개구의 크기보다 큰 경우, 제1 주변 영역은, 제2 주변 영역에 비해, 상대적으로 더 먼 거리에 위치한 주변 환경을 포함할 수 있다.When the size of the first opening according to an embodiment is greater than the size of the second opening, the first peripheral area may include a surrounding environment located at a relatively greater distance than the second peripheral area.
또한, 일 실시 예에 의한 제2 주변 영역은, 제1 주변 영역에 비해, 수직면에서 더 넓은 영역의 주변 환경을 포함할 수 있다. 따라서, 제1 주변 영역이 상대적으로, 센서와 동일 평면 또는 비슷한 높이의 주변 환경을 포함하는데 반해, 제2 주변 영역은, 센서보다 더 높거나 더 낮은 높이의 주변 환경을 더 포함할 수 있다.In addition, the second peripheral area according to an embodiment may include a surrounding environment of a wider area in a vertical plane than the first peripheral area. Accordingly, the first peripheral region may include a peripheral environment relatively flush with or at a height similar to that of the sensor, whereas the second peripheral region may further include a peripheral environment having a height higher or lower than that of the sensor.
따라서, 일 실시 예에 의하면, 서로 다른 크기의 개구를 가진 안테나들을 이용하여, 전자 장치(1000)를 기준으로 위치에 있어서, 서로 다른 특성을 가진 주변 환경에 대한 탐색이 수행될 수 있다. 일 실시 예에 의한 전자 장치(1000)는, 서로 다른 특성의 주변 환경에 기초하여, 지도 데이터를 생성하거나, 주변 환경의 객체를 인식(detect)할 수 있다.Accordingly, according to an embodiment, a search for a surrounding environment having different characteristics may be performed at a location with respect to the
일 실시 예에 의하면, 제1 주변 영역 및 제2 주변 영역 중 적어도 하나가 탐색된 결과에 기초하여, 전자 장치(1000)의 주변 환경에 대한 지도 데이터가 생성될 수 있다. 또한, 일 실시 예에 의한 전자 장치(1000)는 제2 주변 영역이 탐색된 결과에 기초하여, 전자 장치(1000)의 주변에 위치한 적어도 하나의 객체를 인식할 수 있다.According to an embodiment, map data for the surrounding environment of the
센싱부(1400)는, 전자 장치(1000)의 상태 또는 전자 장치(1000) 주변의 상태를 감지하고, 감지된 정보를 프로세서(1300)로 전달할 수 있다.The
센싱부(1400)는, 지자기 센서(Geomagnetic sensor)(1410), 가속도 센서(Acceleration sensor)(1420), 온/습도 센서(1430), 적외선 센서(1440), 자이로스코프 센서(1450), 위치 센서(예컨대, GPS, 라이더 센서, 레이더 센서)(1460), 기압 센서(1470), 근접 센서(1480), 및 RGB 센서(illuminance sensor)(1490) 중 적어도 하나를 포함할 수 있으나, 이에 한정되는 것은 아니다.The
일 실시 예에 의한 센싱부(1400)는, 주변 환경을 탐색하기 위한 위치 센서(1460)로서, 예를 들면, 라이더 센서 또는 레이더 센서 등을 포함할 수 있다. 일 실시 예에 의한 라이더 센서 또는 레이더 센서는, 다양한 크기의 개구를 가진 안테나들을 이용하여, 복수의 센서 신호를 방사하고, 방사된 신호들에 대한 반사된 신호에 기초하여, 주변 환경을 탐색할 수 있다. 일 실시 예에 의한, 라이더 센서 또는 레이더 센서는, 복수의 센서 신호가 방사될 수 있는 방향 범위에 따라서, 서로 다른 크기의 개구를 가진 안테나들을 이용하여, 주변 환경을 탐색할 수 있다.The
통신부(1500)는, 전자 장치(1000)가 서버(2000) 또는 외부 장치(미도시)와 통신을 하게 하는 하나 이상의 구성요소를 포함할 수 있다. 예를 들어, 통신부(1500)는, 근거리 통신부(1510), 이동 통신부(1520), 방송 수신부(1530)를 포함할 수 있다.The
근거리 통신부(short-range wireless communication unit)(1510)는, 블루투스 통신부, BLE(Bluetooth Low Energy) 통신부, 근거리 무선 통신부(Near Field Communication unit), WLAN(와이파이) 통신부, 지그비(Zigbee) 통신부, 적외선(IrDA, infrared Data Association) 통신부, WFD(Wi-Fi Direct) 통신부, UWB(ultra wideband) 통신부, Ant+ 통신부 등을 포함할 수 있으나, 이에 한정되는 것은 아니다.Short-range
이동 통신부(1520)는, 이동 통신망 상에서 기지국, 외부의 단말, 서버 중 적어도 하나와 무선 신호를 송수신한다. 여기에서, 무선 신호는, 음성 호 신호, 화상 통화 호 신호 또는 문자/멀티미디어 메시지 송수신에 따른 다양한 형태의 데이터를 포함할 수 있다.The
방송 수신부(1530)는, 방송 채널을 통하여 외부로부터 방송 신호 및/또는 방송 관련된 정보를 수신한다. 방송 채널은 위성 채널, 지상파 채널을 포함할 수 있다. 구현 예에 따라서 전자 장치(1000)가 방송 수신부(1530)를 포함하지 않을 수도 있다.The
일 실시 예에 의한, 통신부(1500)는 주변 환경을 탐색하는데 필요한 정보를 송수신할 수 있다.According to an embodiment, the
A/V(Audio/Video) 입력부(1600)는 오디오 신호 또는 비디오 신호 입력을 위한 것으로, 이에는 카메라(1610)와 마이크로폰(1620) 등이 포함될 수 있다. 카메라(1610)는 화상 통화모드 또는 촬영 모드에서 이미지 센서를 통해 정지영상 또는 동영상 등의 화상 프레임을 얻을 수 있다. 이미지 센서를 통해 캡쳐된 이미지는 프로세서(1300) 또는 별도의 이미지 처리부(미도시)를 통해 처리될 수 있다.The A/V (Audio/Video)
마이크로폰(1620)은, 외부의 음향 신호를 입력 받아 전기적인 음성 데이터로 처리한다. 예를 들어, 마이크로폰(1620)은 주변 환경 탐색을 수행하기 위한 사용자의 음성 입력을 수신할 수 있다.The
메모리(1700)는, 프로세서(1300)의 처리 및 제어를 위한 프로그램을 저장할 수 있고, 전자 장치(1000)로 입력되거나 전자 장치(1000)로부터 출력되는 데이터를 저장할 수도 있다.The
일 실시 예에 의한 메모리(1700)는 주변 환경을 탐색하는데 필요한 데이터를 저장할 수 있다. 예를 들면, 메모리(1700)는 주변 환경을 탐색한 결과에 기초하여, 생성된 지도 데이터를 저장할 수 있다.The
메모리(1700)는 플래시 메모리 타입(flash memory type), 하드디스크 타입(hard disk type), 멀티미디어 카드 마이크로 타입(multimedia card micro type), 카드 타입의 메모리(예를 들어 SD 또는 XD 메모리 등), 램(RAM, Random Access Memory) SRAM(Static Random Access Memory), 롬(ROM, Read-Only Memory), EEPROM(Electrically Erasable Programmable Read-Only Memory), PROM(Programmable Read-Only Memory), 자기 메모리, 자기 디스크, 광디스크 중 적어도 하나의 타입의 저장매체를 포함할 수 있다.The
메모리(1700)에 저장된 프로그램들은 그 기능에 따라 복수 개의 모듈들로 분류할 수 있는데, 예를 들어, UI 모듈(1710), 터치 스크린 모듈(1720), 알림 모듈(1730) 등으로 분류될 수 있다.Programs stored in the
UI 모듈(1710)은, 애플리케이션 별로 전자 장치(1000)와 연동되는 특화된 UI, GUI 등을 제공할 수 있다. 터치 스크린 모듈(1720)은 사용자의 터치 스크린 상의 터치 제스처를 감지하고, 터치 제스처에 관한 정보를 프로세서(1300)로 전달할 수 있다. 일부 실시예에 따른 터치 스크린 모듈(1720)은 터치 코드를 인식하고 분석할 수 있다. 터치 스크린 모듈(1720)은 컨트롤러를 포함하는 별도의 하드웨어로 구성될 수도 있다.The
터치스크린의 터치 또는 근접 터치를 감지하기 위해 터치스크린의 내부 또는 근처에 다양한 센서가 구비될 수 있다. 터치스크린의 터치를 감지하기 위한 센서의 일례로 촉각 센서가 있다. 촉각 센서는 사람이 느끼는 정도로 또는 그 이상으로 특정 물체의 접촉을 감지하는 센서를 말한다. 촉각 센서는 접촉면의 거칠기, 접촉 물체의 단단함, 접촉 지점의 온도 등의 다양한 정보를 감지할 수 있다.Various sensors may be provided inside or near the touch screen to detect a touch or a proximity touch of the touch screen. A tactile sensor is an example of a sensor for detecting a touch of a touch screen. A tactile sensor refers to a sensor that senses a touch of a specific object to a degree or more that a person feels. The tactile sensor may sense various information such as the roughness of the contact surface, the hardness of the contact object, and the temperature of the contact point.
사용자의 터치 제스처에는 탭, 터치&홀드, 더블 탭, 드래그, 패닝, 플릭, 드래그 앤드 드롭, 스와이프 등이 있을 수 있다.The user's touch gesture may include a tap, touch & hold, double tap, drag, pan, flick, drag and drop, swipe, and the like.
알림 모듈(1730)은 전자 장치(1000)의 이벤트 발생을 알리기 위한 신호를 발생할 수 있다.The
도 6은 일 실시 예에 의한 주변 환경을 탐색하는 방법을 나타낸 순서도이다.6 is a flowchart illustrating a method of searching for a surrounding environment according to an exemplary embodiment.
도 6을 참조하면, 단계 610에서, 전자 장치(1000)는, 제1 방향 범위에 속한 방향으로, 제1 개구의 안테나를 통해, 센서에 의해 출력되는, 복수의 센서 신호들을 방사할 수 있다. 일 실시 예에 의한 전자 장치(1000)는, 상기 센서가, 제1 방향 범위에 속한 방향으로, 센서 신호들을 방사할 수 있는 경우, 제1 개구의 안테나를 통해, 센서 신호들을 방사할 수 있다.Referring to FIG. 6 , in
일 실시 예에 의한 센서는, 복수의 센서 신호들이 방사될 수 있는 다양한 방향 범위들 중에서, 제1 방향 범위에 속하는 방향으로, 제1 개구의 안테나를 통하여, 복수의 센서 신호들을 방사할 수 있다. 예를 들어, 센서가 수평면 상에서 360도로 회전하면서, 복수의 센서 신호들을 방사하는 경우, 360도 방향 범위 중에서, 센서(100)가 제1 방향 범위에 속하는 방향을 향하는 동안에는, 제1 개구의 안테나를 통하여, 복수의 센서 신호들을 방사할 수 있다.A sensor according to an embodiment may radiate a plurality of sensor signals through an antenna of a first opening in a direction belonging to a first direction range among various directional ranges in which a plurality of sensor signals may be radiated. For example, when the sensor rotates 360 degrees on a horizontal plane and radiates a plurality of sensor signals, while the
단계 620에서, 전자 장치(1000)는, 단계 610에서, 방사된 복수의 센서 신호들에 대한 반사 신호에 기초하여, 제1 주변 영역을 탐색할 수 있다. 일 실시 예에 의한 반사 신호는, 단계 610에서, 방사된 복수의 센서 신호들이 주변 환경에 존재하는 다양한 객체들의 표면에 부딪혀 반사된 신호들을 포함할 수 있다.In
일 실시 예에 의한 전자 장치(1000)는, 반사 신호의 세기, 수신 시점, 파형 등 반사 신호에 대한 다양한 특성에 기초하여, 센서 신호들이 부딪힌 객체들의 위치, 형태 등을 판단함으로써, 주변 환경을 탐색할 수 있다. 일 실시 예에 의한 제1 개구의 안테나를 통해 방사된 센서 신호들은 제1 주변 영역에 속한 객체들의 표면에서 반사됨에 따라, 전자 장치(1000)는 반사된 신호들에 기초하여, 제1 주변 영역을 탐색할 수 있다.The
단계 630에서, 전자 장치(1000)는, 제2 방향 범위에 속한 방향으로, 제2 개구의 안테나를 통해, 복수의 센서 신호들을 방사하고, 단계 640에서, 상기 방사된 복수의 센서 신호들에 대한 반사 신호에 기초하여, 제2 주변 영역을 탐색할 수 있다.In
따라서, 일 실시 예에 의한 센서(100)는, 센서(100)가 향하는 방향 범위에 따라서, 서로 다른 개구의 안테나를 이용하여, 복수의 센서 신호들을 방사할 수 있다. 서로 다른 개구의 안테나를 통해 복수의 센서 신호들이 방사됨에 따라서, 일 실시 예에 의한 전자 장치(1000)는, 다양한 방향으로 회전하는 하나의 센서를 이용하여, 서로 다른 주변 영역을 탐색할 수 있다.Accordingly, the
일 실시 예에 의하면, 개구의 크기, 즉, 면적이 넓을수록, 방사되는 센서 신호들의 지향성(directivity)이 커짐에 따라서, 더 먼 거리의 주변 환경이 탐색될 수 있으나, 수직면에서, 더 좁은 범위의 주변 환경이 탐색될 수 있다. 반면, 안테나의 개구의 면적이 좁을수록, 방사되는 센서 신호들의 지향성은 작아짐에 따라, 더 가까운 거리의 주변 환경이 탐색될 수 있으나, 수직면에서 더 넓은 범위의 주변 환경이 탐색될 수 있다.According to an embodiment, as the size of the opening, that is, the larger the area, the greater the directivity of the emitted sensor signals, the greater the distance the surrounding environment can be searched, but in the vertical plane, the narrower range The surrounding environment may be explored. On the other hand, as the area of the opening of the antenna decreases, the directivity of the radiated sensor signals decreases, so that a nearby environment may be searched at a closer distance, but a surrounding environment of a wider range may be searched in a vertical plane.
일 실시 예에 의하면, 제2 개구의 안테나뿐만 아니라, 제1 개구의 안테나를 함께 이용하여 센서 신호들을 방사할 수 있다. 예를 들면, 제2 방향 범위에서, 센서(100)는, 제1 개구의 안테나와, 제2 개구의 안테나를 함께 이용하여, 센서 신호들을 방사할 수 있다.According to an embodiment, sensor signals may be radiated by using not only the antenna of the second opening but also the antenna of the first opening. For example, in the second direction range, the
또한, 일 실시 예에 의하면, 센서(100)가 제2 방향 범위에서, 일정한 간격으로, 총 a번의 센서 신호를 방사하는 동작을 수행할 때, 제2 개구의 안테나를 통한 센서 신호의 방사 동작은, 소정 간격(ex. 3의 배수 간격)으로 b번(b는 a보다 작은 상수값) 수행될 수 있다. 또한, 제1 개구의 안테나를 통한 센서 신호의 방사 동작은, 소정 간격으로, 제2 개구의 안테나를 통한 센서 신호의 방사 동작이 수행되는 두 지점 사이의 구간들에서, 일정한 간격으로 수행되거나 모든 구간에서, 제2 방향 범위 내에서는, 총 a-b번 수행될 수 있다. 또는, 제1 개구의 안테나를 통한 센서 신호의 방사 동작은, 제2 개구의 안테나를 통한 센서 신호의 방사 동작과 함께 수행됨에 따라, 제2 방향 범위 내에서, 총 a번 수행될 수도 있다.In addition, according to an embodiment, when the
도 7을 일 실시 예에 따른 전자 장치(1000)에 구비된 센서(730)의 일 예를 나타낸 것이다.7 is a diagram illustrating an example of a
도 7을 참조하면, 센서(720)는, 전자 장치(1000)에 고정되는 고정부(790)와 결합되는, 회전을 위한 회전부(740)에 장착될 수 있고, 센서(730)는, 전자 장치(1000)의 주변 영역에 대한 탐색 동작을 수행할 수 있다.Referring to FIG. 7 , the
일 실시 예에 의한 제어부(710)는, 센서(720)를 제어하기 위한 구성으로, 도 5의 프로세서(1300)로부터 수신된 제어 신호에 따라 센서(720)를 제어하거나, 도 5의 프로세서(1300)와 대응되는 구성일 수 있다. 상술한 예에 한하지 않고, 제어부(710)는, 다양한 방법으로, 센서(720)를 제어하는 구성일 수 있다.The
일 실시 예에 의한 센서(720)는, 도 7에 도시된 화살표 방향에 따라 회전하면서, 주변 영역을 탐색하기 위한 복수의 센서 신호를 방사하고, 방사된 신호들에 대한 반사된 신호에 기초하여, 주변 영역을 탐색할 수 있다. 일 실시 예에 의한 센서(720)는 도 1의 센서(100)와 대응되며, 전자 장치(1000)의 상단 부분에 장착되어, 주변 영역을 탐색하는 동작을 수행할 수 있다.The
일 실시 예에 의한 센서(720)는, 예를 들면, 레이더 센서일 수 있다. 상술한 예에 한하지 않고, 일 실시 예에 의한 센서(720)는, 다양한 개구의 안테나을 통해 센서 신호들을 방사하고, 반사된 신호에 기초하여, 주변 영역을 탐색하는, 다양한 종류의 센서를 포함할 수 있다.The
일 실시 예에 의한 센서(720)는, 스위치(730), 제1 개구의 안테나(740) 및 제2 개구의 안테나(750)를 더 포함할 수 있다. 상술한 예에 한하지 않고, 센서(720)는, 전자 장치(1000)의 주변 영역을 탐색하는데 필요한 다양한 구성을 더 포함할 수 있다.The
일 실시 예에 의한 스위치(730)는, 회전 방향에 따라 회전하는, 센서(720)의 위치에 따라서, 서로 다른 개구의 안테나를 이용하여 센서 신호들을 방사할 수 있도록, 센서(720)의 동작 모드를 전환시킬 수 있다. 일 실시 예에 의한 센서(720)의 동작 모드는, 제1 개구의 안테나(740)를 이용하여 센서 신호들이 방사되는 제1 동작 모드 및 제2 개구의 안테나(750)를 이용하여 센서 신호들이 방사되는 제2 동작 모드를 포함할 수 있다. 상술한 예에 한하지 않고, 센서(720)의 동작 모드는, 서로 다른 개구의 안테나의 종류만큼, 복수 개의 동작 모드가 존재할 수 있다.The
일 실시 예에 의한 제1 개구의 안테나(740)는, 센서(720)의 회전 위치에 따라, 스위치(730)에 의해 제1 동작 모드로 센서(720)가 동작하는 경우, 센서(720)가 복수의 센서 신호들을 방사하여, 제1 주변 영역을 탐색하는데 이용될 수 있다. 일 실시 예에 따른 제1 개구의 크기가 제2 개구의 크기보다 큰 경우, 제1 개구의 안테나(740)는, 제2 개구의 안테나(750)에 의해 탐색되는 제2 주변 영역보다, 더 먼거리에 존재하는 제1 주변 영역을 탐색하는데 이용될 수 있다.When the
일 실시 예에 의한 제2 개구의 안테나(750)는, 센서(720)의 회전 위치에 따라, 스위치(730)에 의해 제2 동작 모드로, 센서(720)가 동작하는 경우, 센서(720)가 복수의 센서 신호들을 방사하여, 제2 주변 영역을 탐색하는데 이용될 수 있다. 일 실시 예에 따른 제2 개구의 안테나(750)는, 상술한 제1 주변 영역보다, 더 가까이에 존재하지만, 수직으로 더 넓은 영역을 포함하는 제2 주변 영역을 탐색하는데 이용될 수 있다.The
일 실시 예에 의한 회전부(760)는, 회전부(760)에 장착된 센서(720)가 반지름 R 크기의 원모양으로 회전될 수 있도록, 도 7에 도시된 화살표에 의해 나타나는 회전 방향에 따라 회전할 수 있다. 도시된 예에 한하지 않고, 일 실시 예에 의한 센서(720)는, 다양한 형태의 회전부(760)에 의하여, 전자 장치(1000)에서, 회전할 수 있다.The
일 실시 예에 의한 검출부(770)는 센서(720)의 회전 상의 위치를 검출하여, 스위치(730)가 센서(720)의 위치에 따라 동작 모드를 전환할 수 있도록, 동작할 수 있다. 일 실시 예에 의한 검출부(770)는, 도 7에 도시된 바와 같이, 센서(720)와 함께 회전부(760)에 장착되어, 센서(720)와 동일한 속도로 회전할 수 있다.The
일 실시 예에 의한 검출부(770)는, 검출부(770)의 회전에 따라 변환되는, 고정부(790)의 서로 다른 특성의 표면들(780)을 감지함으로써, 센서(720)의 회전 위치를 검출할 수 있다. 예를 들면, 검출부(770)는 고정부(790)의 서로 다른 특성의 표면들(780)을 감지할 수 있는, 포토 다이오드일 수 있고, 이에 한하지 않고, 다양한 형태 및 종류의 센서일 수 있다.The
예를 들면, 회전부(760)의 회전에 따라서, 검출부(770)에 의해 서로 다른 특성의 표면들(ex. 밝은 색상 표면, 어두운 색상 표면)이 교대로 감지될 수 있는데, 다른 표면에 비해 길이가 더 긴 특수한 표면이 검출될 수 있다. 일 실시 예에 따라, 검출부(770)에 의해 특수한 표면이 검출됨에 따라서, 스위치(730)가 동작 모드를 전환할 수 있다. 예를 들면, 검출부(770)에 의해 특수한 표면이 검출됨에 따라, 제어부(710)는, 스위치(730)가 제1 동작 모드에서 제2 동작 모드로 전환하도록, 스위치(730)를 제어할 수 있다.For example, according to the rotation of the
일 실시 예에 의한 고정부(790)는, 회전부(760) 및 센서(720)가 회전하면서, 전자 장치(1000)의 주변 영역을 탐색할 수 있도록, 전자 장치(1000)의 표면에 장착될 수 있고, 검출부(770)에 의해 감지될 수 있는 서로 다른 특성의 표면들(780)을 포함할 수 있다.The fixing
도 8은 일 실시 예에 의한 제1 동작 모드 및 제2 동작 모드로 동작하는 센서(820)의 일 예를 도시한 것이다.8 illustrates an example of a
도 8의 810 및 820은, 도 7에 도시된 센서(720), 검출부(770) 및 회전부(760) 등을 위에서 아래로 내려다본 일 예를 도시한 것이다.
또한, 도 8의 830은, 회전에 따라, 검출부(811)에 의해 검출되는 신호(831)와 센서(720)의 동작 모드들의 일 예를 도시한 것이다.Also,
도 8을 참조하면, 810 및 820에서, 센서(720)와 검출부(770)는, 회전부(760)의 회전에 의하여, 반지름 R 크기의 원모양으로, 시계 반대방향으로 회전할 수 있다.Referring to FIG. 8 , at 810 and 820 , the
일 실시 예에 의하면, 센서(720)가, 다른 표면들에 비해 길이가 긴, 고정부(790)의 특수한 표면(811)을 지나는 동안, 제2 동작 모드로 동작할 수 있도록, 검출부(770)는, 회전부(760)에서, 센서(720)보다 앞선 위치에 장착되어, 센서(720)와 함께 회전할 수 있다. 예를 들면, 810에서, 검출부(770)가 특수한 표면(811)을 감지함에 따라서, 센서(720)는 820과 같이 특수한 표면(811)을 지나는 동안, 제1 동작 모드에서 전환된 제2 동작 모드로 동작할 수 있다.According to an embodiment, while the
일 실시 예에 따라, 검출부(770)에 의해 감지되는 신호는, 830에 도시된 신호(831)와 같이, 펄스 신호와 같은 형태로, 획득될 수 있다. 예를 들면, 펄스 신호 중 0은, 고정부(790)의 표면 중 어두운 표면과 대응되고, 1은 밝은 표면과 대응될 수 있다. 또한, 센서(720)의 동작 모드 전환을 위한, 특수한 표면(811)은, 다른 펄스 구간보다 길이가 긴, 832 또는 833 구간과 대응될 수 있다.According to an embodiment, the signal detected by the
일 실시 예에 의한 검출부(770)는, 회전에 따라, 다른 표면들보다 길이가 더 긴 811 표면을, 832 또는 833 구간이 종료된 시점에서, 감지함에 따라서, 센서(720)는, 832 또는 833 구간이 종료된 시점부터, 제1 동작 모드에서 제2 동작 모드로 전환하여 동작할 수 있다. 일 실시 예에 의한 센서(720)는, 검출부(770)가 특수한 표면(811)을 감지하는 동안 소요된 시간, 즉, 832 또는 833 구간과 동일한 길이의 시간 구간 동안에, 제2 동작 모드로 동작할 수 있고, 이후에는, 제1 동작 모드로 다시 전환되어 동작할 수 있다.According to the rotation, the
도 9는 일 실시 예에 의한 센서(720)에 의해 감지되는 신호의 일 예를 나타낸 도면이다.9 is a diagram illustrating an example of a signal detected by the
도 9를 참조하면, 920은, 센서(720)에 의해 감지된 신호들 중 객체를 인지하기 위하여 이용되는 신호들의 일 예를 나타내며, 930은, 센서(720)에 의해 감지된 신호들 중 주변 영역에 대한 지도 데이터를 생성하는데 이용되는 신호들의 일 예를 나타낸다. 920 및 930에서, 가로축은, 수평면에서, -180도에서 180도로 회전하는, 센서(720)의 회전 각도와 대응되고, 세로축은, 신호의 세기(dB)와 대응된다.Referring to FIG. 9 ,
920을 참조하면, 센서(720)가 제2 동작 모드로 동작하는 구간(910)에서, 객체를 인지하기 위하여 이용되는 신호들이 감지될 수 있다. 또한, 930을 참조하면, 제1 동작 모드로 동작하는 구간에서, 지도 데이터를 생성하는데 이용되는 신호들이 감지될 수 있다.Referring to 920 , in a
다만, 930에서, 제2 동작 모드로 동작되는 구간(910)은, 객체를 인지하기 위하여 이용되는 신호들과의 간섭으로 인해, 나머지 구간에 비해, 더 큰 노이즈를 포함할 수 있다. 예를 들면, 930의 910 구간에서, -20dB 이하의 신호들은, 간섭으로 인해 발생된 노이즈를 포함하므로, 지도 데이터를 생성하는데 이용되지 않을 수 있다.However, in 930 , the
도 10, 도 11 및 도 12는 일 실시 예에 의한 제1 동작 모드로 동작하는 센서에 의해 획득된 신호의 일 예를 나타낸 도면이다.10, 11, and 12 are diagrams illustrating an example of a signal obtained by a sensor operating in a first operation mode according to an embodiment.
도 10, 도 11 및 도 12를 참조하면, 일 실시 예에 의한 전자 장치(1000)는, 1010, 1020 및 1030에서, 각각 서로 다른 범위에서, 제2 동작 모드에 의한 센서 신호들이 방사될 때, 제1 개구의 안테나를 통해 센서 신호들이 수신될 수 있다.10, 11 and 12 , in the
일 실시 예에 의하면, 제1 동작 모드에 따라서, 복수의 제1 센서 신호들에 대한 반사 신호들이 수신되는 동안에, 일부 구간에서, 제2 동작 모드에 따라, 복수의 제2 센서 신호들이 방사됨에 따라서, 제1 개구의 안테나를 통해 수신된 제1 센서 신호들의 일부분이 제2 센서 신호들에 의해 왜곡될 수 있다.According to an embodiment, according to the first operation mode, while the reflection signals for the plurality of first sensor signals are received, in some section, according to the second operation mode, as the plurality of second sensor signals are emitted , a portion of the first sensor signals received through the antenna of the first aperture may be distorted by the second sensor signals.
1010을 참조하면, 모든 구간에서, 제2 동작 모드에 따른 복수의 제2 센서 신호들이 방사되지 않음에 따라, 제1 개구의 안테나를 통해 수신된 제1 센서 신호들은, -23dB 이하에서 왜곡된 부분을 포함할 수 있다. 일 실시 예에 의하면, 제1 개구의 안테나를 통해 수신된 제1 센서 신호들은, 센서 신호들이 방사되는 주변 환경의 상태에 따라 왜곡된 부분을 포함할 수 있다.Referring to 1010 , in all sections, as a plurality of second sensor signals according to the second operation mode are not radiated, the first sensor signals received through the antenna of the first opening are distorted at -23 dB or less. may include. According to an embodiment, the first sensor signals received through the antenna of the first opening may include a distorted portion according to the state of the surrounding environment to which the sensor signals are radiated.
1020을 참조하면, 360도의 회전 구간 중 일부 구간(1021)에서, 제2 동작 모드에 따른 복수의 제2 센서 신호들이 방사됨에 따라, 제1 개구의 안테나를 통해 수신된 제1 센서 신호들은 -16dB 이하에서 왜곡된 부분을 포함할 수 있다. 일 실시 예에 의하면, 제1 개구의 안테나를 통해 수신된 제1 센서 신호들은, 센서 신호들이 방사되는 주변 환경의 상태에 따라 왜곡된 부분에 더해, 제2 센서 신호들에 의한 간섭 현상으로 인하여, 1010보다 더 큰 왜곡된 부분을 포함할 수 있다.Referring to 1020 , in a
1030을 참조하면, 360도의 회전 구간 중 일부 구간(1031)에서, 제2 동작 모드에 따른 복수의 제2 센서 신호들이 방사됨에 따라, 제1 개구의 안테나를 통해 수신된 제1 센서 신호들은 -12dB 이하에서 왜곡된 부분을 포함할 수 있다. 일 실시 예에 의하면, 제1 개구의 안테나를 통해 수신된 제1 센서 신호들은, 센서 신호들이 방사되는 주변 환경의 상태에 따라 왜곡된 부분에 더해, 제2 센서 신호들에 의한 간섭 현상으로 인하여, 1020보다 더 큰 왜곡된 부분을 포함할 수 있다.Referring to 1030 , in a
도 13, 및 도 14는 일 실시 예에 의한 제2 동작 모드로 제2 주변 영역을 탐색하는 일 예를 나타낸 도면이다.13 and 14 are diagrams illustrating an example of searching a second surrounding area in a second operation mode according to an embodiment.
도 13, 및 도 14를 참조하면, 일 실시 예에 의한 전자 장치(1000)의 센서는, 회전하면서, 제1 동작 모드 및 제2 동작 모드 중 적어도 하나를 수행함으로써, 제1 주변 영역 및 제2 주변 영역을 탐색할 수 있다.13 and 14 , the sensor of the
1110을 참조하면, 일 실시 예에 의한 전자 장치(1000)의 센서는, 1113 및 1114의 회전 구간에서, 제2 동작 모드에 따라 동작함으로써, 1111 및 1112의 센서 신호들이 방사됨에 따라, 제2 주변 영역을 탐색할 수 있다.Referring to 1110 , the sensor of the
일 실시 예에 의하면, 복수 개의 회전 구간에서, 제2 동작 모드에 따라 제2 주변 영역이 탐색됨에 따라서, 수직으로 더 넓은 전자 장치(1000)의 주변 영역이 탐색될 수 있다.According to an embodiment, in a plurality of rotation sections, as the second peripheral region is searched according to the second operation mode, a vertically wider peripheral region of the
1120을 참조하면, 일 실시 예에 의한 전자 장치(1000)의 센서는, 1124, 1125 및 1126의 회전 지점에서, 제2 동작 모드에 따라 동작함으로써, 1121, 1122 및 1123의 센서 신호들이 방사됨에 따라, 제2 주변 영역을 탐색할 수 있다.Referring to 1120 , the sensor of the
1120에서 방사된 센서 신호들은, 1110의 센서 신호들과는 달리, 회전 구간이 아닌 하나의 회전 지점에서, 적어도 하나의 센서 신호들이 방사된 신호들일 수 있다. 따라서, 1120의 실시 예에 따르면, 보다 적은 개수의 센서 신호에 따라서, 제2 주변 영역이 탐색될 수 있다.Unlike the sensor signals of 1110 , the sensor signals emitted from 1120 may be signals emitted from at least one sensor signal at one rotation point rather than a rotation section. Accordingly, according to the embodiment of 1120 , the second surrounding area may be searched according to a smaller number of sensor signals.
도 15는 일 실시 예에 의한 대상체의 상태를 감지하는 일 예를 나타낸 도면이다.15 is a diagram illustrating an example of detecting a state of an object according to an embodiment.
도 15를 참조하면, 일 실시 예에 의한 전자 장치(1000)는, 센서를 이용하여, 제1 주변 영역 및 제2 주변 영역(1201)을 탐색할 수 있다.Referring to FIG. 15 , the
일 실시 예에 의한 전자 장치(1000)는 제2 주변 영역(1201)에 위치한 대상체의 존재뿐만 아니라, 대상체의 상태를 더 감지할 수 있다. 일 실시 예에 의한 대상체의 상태는, 움직임 상태, 심박 수, 호흡 수 등 대상체의 움직임에 관한 다양한 상태를 포함할 수 있다.The
예를 들어, 전자 장치(1000)의 제2 주변 영역(1201)에서 감지된 사람 손이 1202의 화살표 방향과 같이 왕복으로 움직이고 있는 경우, 센서에서 감지된, 사람 손에 대한 반사 신호들은 1205와 같이 획득될 수 있다.For example, when the human hand sensed in the second
일 실시 예에 의하면, 도플러 효과에 기초하여, 사람 손에 대한 움직임이 감지될 수 있다. 예를 들면, 사람 손이 센서로부터 멀어지도록 이동하는 경우, 낮은 주파수의 반사 신호들이(1203)이 센서에서 감지될 수 있으나, 사람 손이 센서와 가까이 이동하는 경우, 높은 주파수의 반사 신호들이(1204)이 센서에서 감지될 수 있다.According to an embodiment, a motion of a human hand may be detected based on the Doppler effect. For example, when the human hand moves away from the sensor, low frequency reflection signals 1203 may be detected at the sensor, but when the human hand moves closer to the sensor, high frequency reflection signals 1204 are detected. ) can be detected by the sensor.
일 실시 예에 의한 센서는 대상체의 심박수 또는 호흡수에 관한 정보도 마찬가지로, 대상체의 외형적인 움직임을 감지함으로써, 획득할 수 있다. 예를 들면, 전자 장치(1000)는 대상체의 가슴 영역에서 반사된 센서 신호에 대하여, FFT(fourier transform function)을 적용하여, 대상체의 움직임을 감지할 수 있다.The sensor according to an embodiment may also acquire information about the heart rate or respiration rate of the object by detecting the external movement of the object. For example, the
일 실시 예에 의한 센서에 의해 방사되는 센서 신호는, 심박수 또는 호흡수에 관한 정보를 획득할 수 있도록, 심박수 또는 호흡수의 주파수(ex. 0.2~2Hz)보다 더 빠른 회전 속도(ex. 1초당 50회)로, 방사될 수 있다.The sensor signal emitted by the sensor according to an embodiment is a faster rotational speed (ex. per second) than the frequency (ex. 0.2 to 2Hz) of the heart rate or respiration rate so as to obtain information about the heart rate or
상술한 예에 한하지 않고, 일 실시 예에 의한 센서는 다양한 방법에 따라서, 전자 장치(1000) 주변에 존재하는 객체의 위치뿐만 아니라 움직임에 관한 정보를 함께 획득할 수 있다.The sensor according to an embodiment is not limited to the above-described example, and according to various methods, the sensor may acquire information about the movement as well as the position of an object existing around the
일 실시 예에 의하면, 하나의 센서를 이용하여, 센서가 향하는 방향에 따라, 다른 크기의 개구를 가진 안테나를 통하여, 센서 신호를 방사함에 따라서, 주변의 다양한 영역을 탐색할 수 있다.According to an embodiment, by using one sensor, various areas around may be searched for by radiating a sensor signal through an antenna having an opening having a different size according to a direction the sensor faces.
기기로 읽을 수 있는 저장매체는, 비일시적(non-transitory) 저장매체의 형태로 제공될 수 있다. 여기서, '비일시적 저장매체'는 실재(tangible)하는 장치이고, 신호(signal)(예: 전자기파)를 포함하지 않는다는 것을 의미할 뿐이며, 이 용어는 데이터가 저장매체에 반영구적으로 저장되는 경우와 임시적으로 저장되는 경우를 구분하지 않는다. 예로, '비일시적 저장매체'는 데이터가 임시적으로 저장되는 버퍼를 포함할 수 있다.The device-readable storage medium may be provided in the form of a non-transitory storage medium. Here, 'non-transitory storage medium' is a tangible device and only means that it does not contain a signal (eg, electromagnetic wave), and this term refers to cases in which data is semi-permanently stored in a storage medium and temporary It does not distinguish the case where it is stored as For example, the 'non-transitory storage medium' may include a buffer in which data is temporarily stored.
일 실시예에 따르면, 본 문서에 개시된 다양한 실시예들에 따른 방법은 컴퓨터 프로그램 제품(computer program product)에 포함되어 제공될 수 있다. 컴퓨터 프로그램 제품은 상품으로서 판매자 및 구매자 간에 거래될 수 있다. 컴퓨터 프로그램 제품은 기기로 읽을 수 있는 저장 매체(예: compact disc read only memory (CD-ROM))의 형태로 배포되거나, 또는 어플리케이션 스토어(예: 플레이 스토어TM)를 통해 또는 두개의 사용자 장치들(예: 스마트폰들) 간에 직접, 온라인으로 배포(예: 다운로드 또는 업로드)될 수 있다. 온라인 배포의 경우에, 컴퓨터 프로그램 제품(예: 다운로더블 앱(downloadable app))의 적어도 일부는 제조사의 서버, 어플리케이션 스토어의 서버, 또는 중계 서버의 메모리와 같은 기기로 읽을 수 있는 저장 매체에 적어도 일시 저장되거나, 임시적으로 생성될 수 있다.According to one embodiment, the method according to various embodiments disclosed in this document may be provided as included in a computer program product. Computer program products may be traded between sellers and buyers as commodities. The computer program product is distributed in the form of a device-readable storage medium (eg compact disc read only memory (CD-ROM)), or through an application store (eg Play Store™) or on two user devices ( It can be distributed (eg downloaded or uploaded) directly, online between smartphones (eg: smartphones). In the case of online distribution, at least a portion of the computer program product (eg, a downloadable app) is stored at least in a machine-readable storage medium, such as a memory of a manufacturer's server, a server of an application store, or a relay server. It may be temporarily stored or temporarily created.
또한, 본 명세서에서, “부”는 프로세서 또는 회로와 같은 하드웨어 구성(hardware component), 및/또는 프로세서와 같은 하드웨어 구성에 의해 실행되는 소프트웨어 구성(software component)일 수 있다.Also, in this specification, “unit” may be a hardware component such as a processor or circuit, and/or a software component executed by a hardware component such as a processor.
전술한 본 발명의 설명은 예시를 위한 것이며, 본 발명이 속하는 기술분야의 통상의 지식을 가진 자는 본 발명의 기술적 사상이나 필수적인 특징을 변경하지 않고서 다른 구체적인 형태로 쉽게 변형이 가능하다는 것을 이해할 수 있을 것이다. 그러므로 이상에서 기술한 실시예들은 모든 면에서 예시적인 것이며 한정적이 아닌 것으로 이해해야만 한다. 예를 들어, 단일형으로 설명되어 있는 각 구성 요소는 분산되어 실시될 수도 있으며, 마찬가지로 분산된 것으로 설명되어 있는 구성 요소들도 결합된 형태로 실시될 수 있다.The above description of the present invention is for illustration, and those of ordinary skill in the art to which the present invention pertains can understand that it can be easily modified into other specific forms without changing the technical spirit or essential features of the present invention. will be. Therefore, it should be understood that the embodiments described above are illustrative in all respects and not restrictive. For example, each component described as a single type may be implemented in a dispersed form, and likewise components described as distributed may be implemented in a combined form.
본 발명의 범위는 상기 상세한 설명보다는 후술하는 특허청구범위에 의하여 나타내어지며, 특허청구범위의 의미 및 범위 그리고 그 균등 개념으로부터 도출되는 모든 변경 또는 변형된 형태가 본 발명의 범위에 포함되는 것으로 해석되어야 한다.The scope of the present invention is indicated by the following claims rather than the above detailed description, and all changes or modifications derived from the meaning and scope of the claims and their equivalent concepts should be interpreted as being included in the scope of the present invention. do.
Claims (15)
Translated fromKoreanApplications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2019138595 | 2019-11-28 | ||
| RU2019138595ARU2721587C1 (en) | 2019-11-28 | 2019-11-28 | Multi-mode radio frequency sensor |
| KR1020200093852AKR20210066693A (en) | 2019-11-28 | 2020-07-28 | Electronic device and operating method for searching surrounding environment |
| KR10-2020-0093852 | 2020-07-28 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021107328A1true WO2021107328A1 (en) | 2021-06-03 |
Family
ID=76129704
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/KR2020/010569CeasedWO2021107328A1 (en) | 2019-11-28 | 2020-08-10 | Electronic device for searching peripheral environment and method for operating same |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2021107328A1 (en) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101641614B1 (en)* | 2013-01-15 | 2016-07-21 | 레이티언 캄파니 | Ladar backtracking of wake turbulence trailing an airborne target for point-of-origin estimation and target classification |
| US20160223659A1 (en)* | 2013-09-13 | 2016-08-04 | Thales | System for detecting and locating submerged objects having neutral buoyancy such as moored mines and associated method |
| JP2016146135A (en)* | 2015-02-09 | 2016-08-12 | 株式会社デンソー | Vehicle display controller and vehicle display control method |
| US20170307736A1 (en)* | 2016-04-22 | 2017-10-26 | OPSYS Tech Ltd. | Multi-Wavelength LIDAR System |
| KR20190096865A (en)* | 2019-07-31 | 2019-08-20 | 엘지전자 주식회사 | Lidar system and autonomous driving system using the same |
- 2020
- 2020-08-10WOPCT/KR2020/010569patent/WO2021107328A1/ennot_activeCeased
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101641614B1 (en)* | 2013-01-15 | 2016-07-21 | 레이티언 캄파니 | Ladar backtracking of wake turbulence trailing an airborne target for point-of-origin estimation and target classification |
| US20160223659A1 (en)* | 2013-09-13 | 2016-08-04 | Thales | System for detecting and locating submerged objects having neutral buoyancy such as moored mines and associated method |
| JP2016146135A (en)* | 2015-02-09 | 2016-08-12 | 株式会社デンソー | Vehicle display controller and vehicle display control method |
| US20170307736A1 (en)* | 2016-04-22 | 2017-10-26 | OPSYS Tech Ltd. | Multi-Wavelength LIDAR System |
| KR20190096865A (en)* | 2019-07-31 | 2019-08-20 | 엘지전자 주식회사 | Lidar system and autonomous driving system using the same |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2021049749A1 (en) | Electronic device and method for position determination using uwb signal | |
| WO2020036347A1 (en) | Electronic device performing operations based on movement direction of external electronic device and method therefor | |
| WO2020153725A1 (en) | Electronic device and method for preventing damage of display | |
| WO2016137294A1 (en) | Electronic device and control method thereof | |
| WO2017003222A1 (en) | Notification apparatus and object position notification method thereof | |
| WO2018151368A1 (en) | Modular home robot | |
| WO2020175786A1 (en) | Methods and apparatuses for object presence detection and range estimation | |
| WO2020096365A1 (en) | Motion assisted leakage removal for radar applications | |
| WO2020055112A1 (en) | Electronic device and method for identifying location by electronic device | |
| WO2020067785A1 (en) | Electronic apparatus and method for controlling function on basis of location and direction of object | |
| WO2017065535A1 (en) | Electronic device and method for controlling same | |
| WO2016204357A1 (en) | Mobile terminal and control method therefor | |
| WO2018135745A1 (en) | Method and device for genertating image for indicating object on periphery of vehicle | |
| WO2012020867A1 (en) | Apparatus and method for displaying service information rendered within a service zone | |
| WO2023287103A1 (en) | Electronic device for controlling cleaning robot, and operating method therefor | |
| WO2017183888A2 (en) | Positioning method and apparatus | |
| WO2021256735A1 (en) | Electronic device and operating method thereof | |
| WO2017138751A1 (en) | Linked type cube set based on short range wireless communication, and cube pattern recognition method and system using same | |
| WO2016080662A1 (en) | Method and device for inputting korean characters based on motion of fingers of user | |
| WO2020022617A1 (en) | Electronic device for detecting external object using plurality of array antennas arranged in plurality of directions and method thereof | |
| WO2021107328A1 (en) | Electronic device for searching peripheral environment and method for operating same | |
| WO2022211239A1 (en) | Content operation method and device based on uwb communication | |
| WO2021215815A1 (en) | Electronic device for establishing wireless communication channel and operation method thereof | |
| WO2022085940A1 (en) | Method and apparatus for controlling display of plurality of objects on wearable display device | |
| WO2022010115A1 (en) | Antenna control method for providing uwb service, and electronic device supporting same |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application | Ref document number:20892032 Country of ref document:EP Kind code of ref document:A1 | |
| NENP | Non-entry into the national phase | Ref country code:DE | |
| 122 | Ep: pct application non-entry in european phase | Ref document number:20892032 Country of ref document:EP Kind code of ref document:A1 |