WO2021102911A1 - Image detection method, image detection device, and storage medium - Google Patents
Image detection method, image detection device, and storage mediumDownload PDFInfo
- Publication number
- WO2021102911A1 WO2021102911A1PCT/CN2019/121977CN2019121977WWO2021102911A1WO 2021102911 A1WO2021102911 A1WO 2021102911A1CN 2019121977 WCN2019121977 WCN 2019121977WWO 2021102911 A1WO2021102911 A1WO 2021102911A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- sub
- image
- detection
- wide
- target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images








Classifications
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/50—Depth or shape recovery
- G06T7/55—Depth or shape recovery from multiple images
- G06T7/593—Depth or shape recovery from multiple images from stereo images
Definitions
- This applicationrelates to the field of computer technology, and in particular to an image detection method, image detection device and storage medium.
- the wide-angle imageis an image with a super-large field of view, and has a large application in fields such as monitoring, robot navigation, and engineering measurement.
- the embodiments of the present inventionprovide an image detection method, an image detection device, and a storage medium, which can improve the accuracy of three-dimensional target detection for a wide-angle image.
- an embodiment of the present inventionprovides an image detection method.
- the methodincludes: converting a wide-angle image into N sub-images, the sub-images are non-wide-angle images, the wide-angle images contain objects to be detected, and N is greater than or equal to 2. ; Perform three-dimensional target detection on each sub-image to obtain N sub-detection results corresponding to the target to be detected; output the target detection result according to the N sub-detection results, and the target detection result includes the three-dimensional information of the target to be detected.
- the wide-angle imageincludes a fisheye image.
- the non-wide-angle imageincludes a pinhole imaging image.
- the three-dimensional informationincludes the category of the object to be detected, the position of the object to be detected in the three-dimensional space, and the physical size and orientation of the object to be detected.
- the specific implementation of converting the wide-angle image into N sub-imagesis: determining N sub-regions of the wide-angle image; reprojecting the N sub-regions of the wide-angle image to obtain N sub-images.
- the N sub-regionshave overlapping parts.
- a specific implementation manner for determining the N sub-regions of the wide-angle imageis: dividing the wide-angle image into N sub-regions; the N sub-regions have no overlapping parts.
- the N sub-regions of the wide-angle imageare reprojected to obtain the N sub-images.
- the specific implementation manneris: for each sub-region, a virtual camera is set, and the virtual camera includes preset camera parameters; The camera parameters and projection methods of the virtual cameras in the sub-regions are used to reproject the N sub-regions of the wide-angle image to obtain N sub-images.
- the three-dimensional target detectionis performed on each sub-image to obtain N sub-detection results corresponding to the target to be detected.
- the specific implementationis: perform three-dimensional target detection on each sub-image to obtain N detection results ; Calculate the degree of overlap between each sub-detection result in each detection result and each sub-detection result in the other N-1 detection results; calculate the sub-detection result of each detection result whose degree of overlap is greater than the first preset threshold, As a result of the sub-detection corresponding to the target to be detected.
- a specific implementation manner of outputting the target detection result according to the N sub-detection resultsis: the N sub-detection results are combined to obtain the target detection result.
- the N sub-detection resultsare combined to obtain the target detection result.
- the specific implementation manneris to calculate the degree of overlap between each sub-detection result of the N sub-detection results and the other N-1 sub-detection results. ; From the N sub-detection results, remove the M sub-detection results whose average degree of overlap is less than the second preset threshold.
- the average degree of overlap of each sub-detection resultis the average value of the N-1 overlap degrees corresponding to each sub-detection result, M Greater than or equal to 0; Determine the target detection result according to the remaining (NM) sub-detection results.
- a specific implementation manner for determining the target detection result according to the remaining (N-M) sub-detection resultsis: calculating the average value of the remaining (N-M) sub-detection results as the target detection result.
- the specific implementation manner for determining the target detection resultis: from the remaining (NM) sub-detection results, select the sub-detection with the highest accuracy, or the largest, or the smallest The detection result is used as the target detection result.
- an embodiment of the present inventionprovides an image detection device, and the image detection device includes:
- Wide-angle cameraused to obtain wide-angle images
- Memoryused to store computer programs
- the processorwhich calls a computer program, is used to perform the following operations:
- the sub-imagesare non-wide-angle images.
- the wide-angle imagecontains the target to be detected, and N is greater than or equal to 2.
- Sub-detection resultsoutput target detection results according to the N sub-detection results, and the target detection results include the three-dimensional information of the target to be detected.
- an embodiment of the present applicationprovides a computer-readable storage medium with a computer program stored on the computer-readable storage medium, and the computer program, when executed, implements the image detection method as described in the first aspect .
- the wide-angle image containing the target to be detectedis first converted into N sub-images of the non-wide-angle image, and then three-dimensional target detection is performed on each sub-image to obtain N sub-detection results corresponding to the target to be detected. Finally, the target detection result is output according to the N sub-detection results.
- This methodcan improve the accuracy of 3D target detection for wide-angle images.
- FIG. 1is a schematic diagram of the architecture of an image detection system provided by an embodiment of the present invention
- FIG. 2is a schematic diagram of an application scenario of an image detection device provided by an embodiment of the present invention.
- FIG. 3is a schematic flowchart of an image detection method provided by an embodiment of the present invention.
- FIG. 4is a schematic flowchart of another image detection method provided by an embodiment of the present invention.
- 5ais a schematic diagram of a method for determining sub-regions in a wide-angle image according to an embodiment of the present invention
- Figure 5bis a schematic diagram of another method for determining sub-regions in a wide-angle image according to an embodiment of the present invention.
- FIG. 6is a schematic diagram of a method for determining a sub-image according to an embodiment of the present invention.
- FIG. 7is a schematic diagram of a wide-angle image provided by an embodiment of the present invention.
- FIG. 8is a schematic diagram of a sub-detection result provided by an embodiment of the present invention.
- FIG. 9is a schematic structural diagram of an image detection device provided by an embodiment of the present invention.
- An embodiment of the present inventionprovides an image detection method.
- the image detection devicefirst converts a wide-angle image into N sub-images, the sub-images are non-wide-angle images, and the wide-angle image contains the target to be detected, and N is greater than or equal to 2; then the non-wide-angle image is used
- the three-dimensional target detection algorithmperforms three-dimensional target detection on each sub-image, and obtains N sub-detection results corresponding to the target to be detected; finally, the target detection result is output according to the N sub-detection results, and the target detection result includes the three-dimensional information of the target to be detected.
- This methodconverts the wide-angle image into a sub-image of a non-wide-angle image, and then uses the non-wide-angle image's three-dimensional target detection algorithm to perform three-dimensional target detection on the sub-image to obtain the target detection result of the target to be detected in the wide-angle image, which can improve the wide-angle The accuracy of the image's three-dimensional target detection.
- FIG. 1is a schematic structural diagram of an image detection system provided by an embodiment of the present invention.
- the image detection systemis composed of a wide-angle camera 101 and an image detection device 102.
- the wide-angle camera 101is installed on a vehicle and is used to obtain a wide-angle image of the surrounding environment of the vehicle.
- the image detection device 102is configured to perform three-dimensional target detection on the wide-angle image acquired by the wide-angle camera 101, and output the target detection result of the target to be detected.
- the image detection devicemay obtain a wide-angle image from an external image output device, and the image output device is used to output the wide-angle image.
- the image output deviceoutputs a wide-angle image, and the wide-angle image needs to be detected by the image detection device for the target to be detected. Therefore, the image output device transmits the wide-angle image to the image detection device, and the image detection device obtains the wide-angle image. image.
- the image detection devicemay include an image output device, the image output device may include a fisheye lens, etc., and the image output device is used to output a wide-angle image, so the image detection device may be obtained from the image output device in the image detection device Wide-angle image.
- the image detection equipmentis the driverless car A shown in Figure 2
- the image output deviceis a fisheye lens in the driverless car.
- the fisheye lensis installed in the rearview mirror of the driverless car.
- the fisheye lenscan be triggered to take a wide-angle image A, and the wide-angle image A includes the surrounding environment conditions of the driverless car.
- the driverless car AAfter the driverless car A obtains the wide-angle image A, it detects the target to be detected in the wide-angle image A, and outputs the target detection result of the target to be detected, so that the driverless car A realizes obstacle avoidance of the target to be detected according to the target detection result Or path planning and other functions.
- the image detection method described in this applicationcan also be applied to other movable platforms, such as image detection equipment such as unmanned vehicles or autonomous vehicles, robots, unmanned aerial vehicles, unmanned vehicles, or unmanned ships.
- image detection equipmentsuch as unmanned vehicles or autonomous vehicles, robots, unmanned aerial vehicles, unmanned vehicles, or unmanned ships.
- the embodiment of the applicationdoes not limit this.
- the wide-angle imagehas a large field of view and is an image with distortion.
- the wide-angle imagemay include fish-eye images.
- the non-wide-angle imageis an image taken by a normal camera, and the non-wide-angle image may include a pinhole imaging image.
- an embodiment of the present inventionproposes an image detection method as shown in FIG. 3, and the image detection method may include S301-S303:
- S301The image detection device converts the wide-angle image into N sub-images.
- the image detection deviceAfter the image detection device obtains the wide-angle image, it converts the wide-angle image into N sub-images.
- the wide-angle imagecontains the target to be detected.
- the target to be detectedis determined by the image detection device.
- the Nis greater than or equal to 2, any sub-image. Contains part of the information about the target to be detected. In this way, the image detection device converts the wide-angle image into N non-wide-angle sub-images, which provides the possibility for the subsequent use of the three-dimensional target detection algorithm of the non-wide-angle image.
- the image detection deviceperforms three-dimensional target detection on each sub-image, and obtains N sub-detection results corresponding to the target to be detected.
- the detection algorithm for the three-dimensional target detection of each sub-imageis the three-dimensional target detection algorithm of the monocular image, such as convolutional neural network algorithm, feature space algorithm, etc., which are not limited here.
- the image detection deviceoutputs a target detection result according to the N sub-detection results.
- the image detection deviceoutputs a target detection result according to the N sub-detection results.
- the target detection resultis the detection result of the target to be detected, and the target detection result includes the three-dimensional information of the target to be detected.
- the three-dimensional information of the object to be detectedincludes the category of the object to be detected, the position of the object to be detected in the three-dimensional space, and the physical size and orientation of the object to be detected.
- the image detection deviceobtains the detection of the target to be detected in the wide-angle image by converting the wide-angle image into N non-wide-angle images, and obtaining the target detection result according to the sub-detection results of the N non-wide-angle images. result.
- the image detection method described in the embodiments of the present applicationcan improve the accuracy of three-dimensional target detection.
- FIG. 4is a schematic flowchart of another image detection method provided by an embodiment of the present invention.
- the methodincludes but is not limited to S401-S411:
- the image detection devicedetermines N sub-regions of the wide-angle image.
- the wide-angle imagemay include a fish-eye image, and the wide-angle image contains a target to be detected, which is determined by the image detection device.
- the source of the wide-angle imageis the same as that in S201, and will not be repeated here.
- the image detection deviceAfter acquiring the wide-angle image, the image detection device first determines the object to be detected in the wide-angle image, and then determines the N sub-areas of the wide-angle image according to the object to be detected, and each area contains partial information of the object to be detected. In an implementation manner, the N sub-regions of the wide-angle image determined by the image detection device have overlapping parts.
- the image detection devicecan set a virtual camera for each sub-area.
- the virtual cameraincludes preset camera parameters.
- the camera parametersinclude focal length, optical center coordinates, etc., which can be determined by adjusting the coordinate position of the virtual camera corresponding to each area. In order to avoid the target to be detected in the wide-angle image from being completely cut off, so that there are overlapping parts in the sub-regions.
- the wide-angle image B shown in FIG. 5ais a fisheye image taken by a fisheye lens in a driving car.
- the fisheye lensis installed in the rearview mirror of a driving car, and the fisheye image has fisheye distortion.
- the method for determining the sub-regions of the wide-angle image Bis shown in Figure 5a.
- the object to be detected in the wide-angle image Bis car B.
- the image detection devicedivides the wide-angle image B into two sub-regions as shown in Figure 5a, including sub-regions. A and sub-area B. Both sub-region A and sub-region B contain partial information of the target car B to be detected, and the two sub-regions have overlapping parts, and the overlapping part is the overlapping region M.
- the method for determining the sub-region of the wide-angle image Bcan also be shown in Figure 5b.
- the object to be detected in the wide-angle image Bis car B.
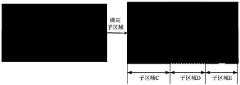
- the image detection devicedivides the wide-angle image B into three sub-regions as shown in Figure 5b. , Including sub-region C, sub-region D and sub-region E.
- the sub-region C, the sub-region D, and the sub-region Eall contain part of the information of the target car B to be detected, and there is no overlapping part in each sub-region.
- S402The image detection device reprojects the N sub-regions of the wide-angle image to obtain N sub-images.
- the image detection devicesets a virtual camera for each sub-area.
- the virtual cameraincludes preset camera parameters.
- the camera parametersinclude focal length, optical center coordinates, etc.; and then according to the camera parameters of the virtual camera corresponding to each sub-area and
- the projection methodreprojects the N sub-regions of the wide-angle image to obtain N sub-images.
- the projection method of the virtual cameraincludes a small hole imaging projection method.
- the image detection devicereprojects the N sub-regions of the wide-angle image according to the camera parameters and projection mode of the virtual camera corresponding to each sub-region: the image detection device acquires each sub-region in the wide-angle image The three-dimensional coordinates corresponding to each pixel point in each sub-area are reprojected according to the camera parameters and projection mode of the virtual camera of each sub-area to obtain N sub-images.
- the sub-region of the wide-angle image B determined by the image detection deviceis shown in Fig. 5a.
- the wide-angle image Bis a fish-eye image. In the fish-eye image, the originally straight car body is curved, and the sub-image of the wide-angle image B is determined
- the methodis shown in Figure 6.
- the image detection devicefirst sets a virtual camera for sub-area A and sub-area B respectively, namely virtual camera A and virtual camera B, and determines the camera parameters and projection methods of virtual camera A and virtual camera B, virtual camera A and virtual camera
- the projection method of Bis the small hole imaging projection method.
- the image detection deviceobtains the three-dimensional coordinates corresponding to each pixel of the sub-area A, and then reprojects each pixel of the sub-area A according to the camera parameters and projection mode of the virtual camera A, and obtains as shown in FIG. 6 Sub image A.
- the image detection deviceobtains the three-dimensional coordinates corresponding to each pixel of the sub-area B, and reprojects each pixel of the sub-area B according to the camera parameters and projection mode of the virtual camera B to obtain the sub-image B as shown in FIG. 6 . It can be seen from Figure 6 that the image detection device converts the distorted wide-angle image B into two non-distorted non-wide-angle images, namely sub-image A and sub-image B.
- Both sub-image A and sub-image Bcontain the target to be detected, namely Car B.
- the sub-image A and the sub-image Bare the images formed by the small holes. Therefore, in the sub-image A and the sub-image B, the originally straight vehicle body remains straight.
- the image detection deviceperforms three-dimensional target detection on each sub-image, and obtains N sub-detection results corresponding to the target to be detected.
- the image detection deviceAfter the image detection device obtains N sub-images, it uses a three-dimensional target detection algorithm to perform three-dimensional target detection on each sub-image, and obtain N sub-detection results corresponding to the target to be detected.
- the three-dimensional target detection algorithmis a three-dimensional target detection algorithm for monocular images, including convolutional neural network algorithms, feature space algorithms, and so on.
- the image detection deviceuses a convolutional neural network algorithm to extract features of the object to be detected in the sub-image, and estimate the category, circumscribed rectangle, and three-dimensional coordinate position of the object to be detected from the extracted features.
- the image detection devicefirst uses a three-dimensional target detection algorithm to perform three-dimensional target detection on each sub-image to obtain N Because the wide-angle image contains only one target to be detected, the detection result of each sub-image is the sub-detection result corresponding to the target to be detected. Therefore, each detection result is directly regarded as the target corresponding to the target to be detected. Sub-test results.
- the wide-angle image Bis shown in Fig. 5a.
- the image detection devicedetermines that the object to be detected in the wide-angle image B is car B. It can be seen that the wide-angle image B contains only one object to be detected, which is obtained by the image detection device.
- the sub-imagesare shown in Figure 6, which are sub-image A and sub-image B.
- the image detection deviceperforms three-dimensional target detection on sub-image A, and obtains the detection result A of sub-image A.
- the detection result Acontains only the target car B to be detected. Therefore, the detection result A is used as the sub-detection result corresponding to the target car B to be detected.
- the image detection deviceperforms three-dimensional target detection on the sub-image B, and obtains the detection result B of the sub-image B.
- the detection result Bis also Only part of the information of the target car B to be detected is included, so the detection result B is taken as the sub-detection result corresponding to the target car B to be detected. Therefore, the image detection device performs three-dimensional target detection on the sub-image A and the sub-image B corresponding to the wide-angle image B, and the obtained sub-detection results corresponding to the target car B to be detected are the detection result A and the detection result B.
- the image detection devicefirst uses a three-dimensional target detection algorithm to perform three-dimensional target detection on each sub-image to obtain N detections.
- each detection resultcontains multiple sub-detection results, some of the sub-detection results correspond to the sub-detection results of the target to be detected, and some sub-detection results correspond to the sub-detection results of the target to be detected.
- the image detection devicecalculates the degree of overlap between each sub-detection result in each detection result and each sub-detection result in the other N-1 detection results, and sets the degree of overlap in each detection result to be greater than the first preset threshold.
- the first preset thresholdis set in advance by the image detection device.
- each sub-detection result in each detection result and each sub-detection result in the other N-1 detection resultsis greater than the first preset threshold. It indicates that the sub-detection result is the detection result of the target to be detected. It is not a detection result of a target similar to the target to be detected, so the image detection device uses the sub-detection result as the sub-detection result corresponding to the target to be detected. In this way, it can be ensured that the sub-detection result obtained by the image detection device is the sub-detection result corresponding to the target to be detected, and the reliability of the N sub-detection results can be improved.
- the wide-angle image C and its sub-regionsare shown in FIG. 7.
- the wide-angle image Cis a fish-eye image taken by a fish-eye lens in a car M driving behind in FIG. 7, and the fish-eye lens is installed in the car M. Therefore, the wide-angle image C is an image in front of the car M.
- the car M image detection devicedetermines that the target to be detected in the wide-angle image is car C, and the wide-angle image contains the target car C to be detected and multiple targets similar to car C, which are suspected target A, suspected target B, and suspected target C , Suspected target D, suspected target E, figure suspected target F and suspected target G.
- the image detection deviceWhen the image detection device performs three-dimensional target detection on the sub-image A corresponding to the sub-area A in the wide-angle image C, the first detection result is obtained, and when the image detection device performs three-dimensional target detection on the sub-image B corresponding to the sub-area B in the wide-angle image C When the target is detected, the second detection result is obtained, and the visualization diagrams of the first detection result and the second detection result are respectively represented by the black boxes in FIG. 7.
- the first detection resultincludes the sub-detection result of the suspected target A, the sub-detection result of the suspected target B, the sub-detection result of the suspected target C and the sub-detection result of the target car C to be detected
- the second detection resultincludes the sub-detection result of the suspected target D Result, the sub-detection result of the suspected target E, the sub-detection result of the suspected target F, the sub-detection result of the suspected target G, and the sub-detection result of the target car C to be detected.
- the image detection devicecalculates each sub-detection result of the first detection result.
- the degree of overlap between the detection result and each sub-detection result in the second detection resultIf the first preset threshold is the degree of overlap between sub-region A and sub-region B in the wide-angle image, only the target vehicle to be tested is included in each sub-detection result The sub-detection result of C satisfies the condition, so the image detection device can determine two sub-detection results corresponding to the target car C to be detected.
- the image detection devicemerges the N sub-detection results to obtain a target detection result.
- each sub-image obtained by the image detection devicecontains part of the information of the target to be detected
- the sub-detection results obtainedinclude overlapping detection results about the target to be detected.
- FIG. 8is a schematic diagram of the detection results of the target vehicle B to be detected in the sub-image A and the sub-image B shown in FIG. 6.
- the top views corresponding to the two sub-detection resultshave overlapping parts.
- the image detection equipmentneeds to merge the two detection results to obtain a target detection result about the target to be detected.
- the target detection resultincludes the three-dimensional information of the target to be detected.
- the three-dimensional informationincludes the category of the target to be detected and the target is in three dimensions.
- the position in the space, the physical size and orientation of the object to be detected, and the physical size of the object to be detectedincludes the length, width, and height of the object to be detected.
- the image detection deviceAfter the image detection device obtains N sub-detection results corresponding to the target to be detected, it calculates the degree of overlap between each sub-detection result of the N sub-detection results and the other N-1 sub-detection results; from the N sub-detection results , Remove M sub-detection results whose average degree of overlap is less than the second preset threshold, and the average degree of overlap of each sub-detection result is the average value of N-1 overlap degrees corresponding to each sub-detection result, and M is greater than or equal to 0
- the second preset thresholdis set in advance by the image detection device; the target detection result is determined according to the remaining (NM) sub-detection results. In this way, N sub-detection results can be combined to obtain a target detection result containing the target to be detected.
- the specific method for the image detection device to determine the target detection result based on the remaining (NM) sub-detection resultsis: after obtaining the remaining (NM) sub-detection results, calculate the remaining (NM) sub-detection results Average value, the average value of the remaining (NM) sub-detection results is used as the target detection result.
- the image detection devicedetermines the target detection result according to the remaining (NM) sub-detection results.
- a specific implementation manneris: after obtaining the remaining (NM) sub-detection results, from the remaining (NM) sub-detection results Select the sub-detection result with the highest accuracy, or the largest detection value, or the smallest detection value as the target detection result. The accuracy is determined by the three-dimensional target detection algorithm.
- the sub-detection result with the largest detection valuerefers to the three-dimensional information of the target to be detected.
- the sub-detection result with the largest physical size, and the sub-detection result with the smallest detection valuerefers to the sub-detection result with the smallest physical size in the three-dimensional information of the target to be detected.
- the image detection deviceexpands the wide-angle image into N sub-images of non-wide-angle images, and then performs three-dimensional target detection on each sub-image to obtain N sub-detection results corresponding to the target to be detected.
- a sub-detection result corresponding to the target to be detectedis output, the target detection result is output, and the three-dimensional target detection of the target to be detected in the wide-angle image is realized.
- This methodcan improve the accuracy of the three-dimensional target detection.
- FIG. 9is a schematic structural diagram of an image detection device provided by an embodiment of the present invention.
- the image detection device 90 described in the embodiment of the present inventionincludes a processor 901, a memory 902, and a wide-angle camera 903.
- the wide-angle camera 903is used to output wide-angle images, and the processor 901, the memory 902, and the wide-angle camera 903 are connected by one or more communication buses.
- the above-mentioned processor 901may be a central processing unit (CPU), and the processor may also be other general-purpose processors, digital signal processors (Digital Signal Processors, DSPs), application specific integrated circuits (ASICs). ), off-the-shelf programmable gate array (Field-Programmable Gate Array, FPGA) or other programmable logic devices, discrete gates or transistor logic devices, discrete hardware components, etc.
- the general-purpose processormay be a microprocessor or the processor may also be any conventional processor, etc., and the processor may be a vehicle-mounted computing platform.
- the processor 901is configured to support the image detection device to perform corresponding functions of the image detection device in the method described in FIG. 3 or FIG. 4.
- the aforementioned memory 902may include a read-only memory and a random access memory, and provides computer programs and data to the processor 901.
- a part of the memory 902may also include a non-volatile random access memory.
- NConvert the wide-angle image into N sub-images, the sub-images are non-wide-angle images, the wide-angle image contains the target to be detected, and N is greater than or equal to 2;
- the target detection resultis output according to the N sub-detection results, and the target detection result includes the three-dimensional information of the target to be detected.
- the wide-angle imageincludes a fisheye image.
- the non-wide-angle imageincludes a pinhole imaging image.
- the three-dimensional informationincludes the category of the object to be detected, the position of the object to be detected in the three-dimensional space, and the physical size and orientation of the object to be detected.
- the processor 901is further configured to determine N sub-regions of the wide-angle image; the processor 901 is further configured to reproject the N sub-regions of the wide-angle image to obtain N sub-images.
- the N sub-regionshave overlapping parts.
- the processor 901is further configured to divide the wide-angle image into N sub-regions; the N sub-regions do not have overlapping parts.
- the processor 901is further configured to set a virtual camera for each sub-area, and the virtual camera includes preset camera parameters; the processor 901 is also used to set a virtual camera according to the camera parameters of each sub-area. And the projection method, reproject the N sub-regions of the wide-angle image to obtain N sub-images.
- the processor 901is also used to perform three-dimensional target detection on each sub-image to obtain N detection results; the processor 901 is also used to calculate the difference between each sub-detection result in each detection result and other sub-detection results. The degree of overlap between the sub-detection results in the N-1 detection results; the processor 901 is further configured to use the sub-detection result of each detection result whose degree of overlap is greater than the first preset threshold as the sub-detection result corresponding to the target to be detected Sub-test results.
- the processor 901is further configured to merge the N sub-detection results to obtain the target detection result.
- the processor 901is also used to calculate the degree of overlap between each of the N sub-detection results and the other N-1 sub-detection results; the processor 901 is also used to calculate the degree of overlap between the N sub-detection results In the result, remove the M sub-detection results whose average overlap is less than the second preset threshold, and the average overlap of each sub-detection result is the average value of N-1 overlap degrees corresponding to each sub-detection result, and M is greater than or equal to 0; The processor 801 is further configured to determine the target detection result according to the remaining (NM) sub-detection results.
- the processor 901is further configured to calculate the average value of the remaining (N-M) sub-detection results as the target detection result.
- the processor 901is further configured to select, from the remaining (N-M) sub-detection results, the sub-detection result with the highest accuracy, or the largest or smallest sub-detection result, as the target detection result.
- the embodiment of the present applicationalso provides a readable storage medium, and the readable storage medium stores a computer program.
- the computer programWhen the computer program is executed by a processor, it can be used to implement the implementation corresponding to FIG. 3 or FIG. 4 of the embodiment of the present application.
- the image detection method described in the examplewill not be repeated here.
- the computer-readable storage mediummay be the internal storage unit of the image processing device described in any of the foregoing embodiments, such as the hard disk or memory of the device.
- the computer-readable storage mediummay also be an external storage device of the image processing device, such as a plug-in hard disk equipped on the device, a smart memory card (Smart Media Card, SMC), and a Secure Digital (SD) ) Card, Flash Card, etc.
- the computer-readable storage mediummay also include both an internal storage unit of the image processing device and an external storage device.
- the computer-readable storage mediumis used to store the computer program and other programs and data required by the image processing device.
- the computer-readable storage mediumcan also be used to temporarily store data that has been output or will be output.
- the programcan be stored in a readable storage medium, and the program can be stored in a readable storage medium. During execution, it may include the procedures of the above-mentioned method embodiments.
- the storage mediummay be a magnetic disk, an optical disc, a read-only memory (Read-Only Memory, ROM), or a random access memory (Random Access Memory, RAM), etc.
Landscapes
- Engineering & Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Image Analysis (AREA)
Abstract
Description
Translated fromChinese本申请涉及计算机技术领域,尤其涉及一种图像检测方法、图像检测设备及存储介质。This application relates to the field of computer technology, and in particular to an image detection method, image detection device and storage medium.
广角图像为具有超大的视场的图像,在监控、机器人导航、工程测量等领域有较大应用。The wide-angle image is an image with a super-large field of view, and has a large application in fields such as monitoring, robot navigation, and engineering measurement.
在应用广角图像时,需要对广角图像进行三维目标检测,目前没有与广角图像对应的三维目标检测算法,且由于广角图像存在畸变,直接使用非广角图像的三维目标检测算法对广角图像进行三维目标检测,会降低检测结果的准确度。When using wide-angle images, it is necessary to perform 3D target detection on wide-angle images. Currently, there is no 3D target detection algorithm corresponding to wide-angle images, and due to the distortion of wide-angle images, directly use non-wide-angle image 3D target detection algorithms to perform 3D targets on wide-angle images Detection will reduce the accuracy of the detection results.
发明内容Summary of the invention
本发明实施例提供了一种图像检测方法、图像检测设备及存储介质,可提高针对广角图像的三维目标检测的准确度。The embodiments of the present invention provide an image detection method, an image detection device, and a storage medium, which can improve the accuracy of three-dimensional target detection for a wide-angle image.
第一方面,本发明实施例提供了一种图像检测方法,该方法包括:将广角图像转换为N张子图像,子图像为非广角图像,广角图像中包含有待检测目标,N大于或等于2;对每张子图像进行三维目标检测,得到N个对应于待检测目标的子检测结果;根据N个子检测结果输出目标检测结果,目标检测结果包括待检测目标的三维信息。In the first aspect, an embodiment of the present invention provides an image detection method. The method includes: converting a wide-angle image into N sub-images, the sub-images are non-wide-angle images, the wide-angle images contain objects to be detected, and N is greater than or equal to 2. ; Perform three-dimensional target detection on each sub-image to obtain N sub-detection results corresponding to the target to be detected; output the target detection result according to the N sub-detection results, and the target detection result includes the three-dimensional information of the target to be detected.
在一种实现方式中,广角图像包括鱼眼图像。In one implementation, the wide-angle image includes a fisheye image.
在一种实现方式中,非广角图像包括小孔成像图像。In one implementation, the non-wide-angle image includes a pinhole imaging image.
在一种实现方式中,三维信息包括待检测目标的类别、待检测目标在三维空间中的位置、待检测目标的物理尺寸以及朝向。In an implementation manner, the three-dimensional information includes the category of the object to be detected, the position of the object to be detected in the three-dimensional space, and the physical size and orientation of the object to be detected.
在一种实现方式中,将广角图像转换为N张子图像的具体实现方式为:确定广角图像的N个子区域;对广角图像的N个子区域进行重投影,得到N个子图像。In one implementation, the specific implementation of converting the wide-angle image into N sub-images is: determining N sub-regions of the wide-angle image; reprojecting the N sub-regions of the wide-angle image to obtain N sub-images.
在一种实现方式中,N个子区域存在重叠部分。In one implementation, the N sub-regions have overlapping parts.
在一种实现方式中,确定广角图像的N个子区域的具体实施方式为:将广角图像分割成N个子区域;N个子区域不存在重叠部分。In an implementation manner, a specific implementation manner for determining the N sub-regions of the wide-angle image is: dividing the wide-angle image into N sub-regions; the N sub-regions have no overlapping parts.
在一种实现方式中,对广角图像的N个子区域进行重投影,得到N个子图像的具体实施方式为:对每个子区域,设定一个虚拟相机,虚拟相机包括预设的相机参数;根据每个子区域虚拟相机的相机参数和投影方式,对广角图像的N个子区域进行重投影,得到N个子图像。In one implementation, the N sub-regions of the wide-angle image are reprojected to obtain the N sub-images. The specific implementation manner is: for each sub-region, a virtual camera is set, and the virtual camera includes preset camera parameters; The camera parameters and projection methods of the virtual cameras in the sub-regions are used to reproject the N sub-regions of the wide-angle image to obtain N sub-images.
在一种实现方式中,对每张子图像进行三维目标检测,得到N个对应于待检测目标的子检测结果的具体实施方式为:对每张子图像进行三维目标检测,得到N个检测结果;计算每个检测结果中各子检测结果分别与其他N-1个检测结果中各子检测结果之间的重叠度;将每个检测结果中重叠度大于第一预设阈值的子检测结果,作为对应于待检测目标的子检测结果。In one implementation, the three-dimensional target detection is performed on each sub-image to obtain N sub-detection results corresponding to the target to be detected. The specific implementation is: perform three-dimensional target detection on each sub-image to obtain N detection results ; Calculate the degree of overlap between each sub-detection result in each detection result and each sub-detection result in the other N-1 detection results; calculate the sub-detection result of each detection result whose degree of overlap is greater than the first preset threshold, As a result of the sub-detection corresponding to the target to be detected.
在一种实现方式中,根据N个子检测结果输出目标检测结果的具体实施方式为:将N个子检测结果进行合并处理,得到目标检测结果。In an implementation manner, a specific implementation manner of outputting the target detection result according to the N sub-detection results is: the N sub-detection results are combined to obtain the target detection result.
在一种实现方式中,将N个子检测结果进行合并处理,得到目标检测结果的具体实施方式为:计算N个子检测结果中每个子检测结果分别与其他N-1个子检测结果之间的重叠度;从N个子检测结果中,去除平均重叠度小于第二预设阈值的M子检测结果,每个子检测结果的平均重叠度为每个子检测结果对应的N-1个重叠度的平均值,M大于或等于0;根据剩余的(N-M)个子检测结果,确定目标检测结果。In an implementation manner, the N sub-detection results are combined to obtain the target detection result. The specific implementation manner is to calculate the degree of overlap between each sub-detection result of the N sub-detection results and the other N-1 sub-detection results. ; From the N sub-detection results, remove the M sub-detection results whose average degree of overlap is less than the second preset threshold. The average degree of overlap of each sub-detection result is the average value of the N-1 overlap degrees corresponding to each sub-detection result, M Greater than or equal to 0; Determine the target detection result according to the remaining (NM) sub-detection results.
在一种实现方式中,根据剩余的(N-M)个子检测结果,确定目标检测结果的具体实施方式为:计算剩余的(N-M)个子检测结果的平均值,作为目标检测结果。In an implementation manner, a specific implementation manner for determining the target detection result according to the remaining (N-M) sub-detection results is: calculating the average value of the remaining (N-M) sub-detection results as the target detection result.
在一种实现方式中,根据剩余的(N-M)个子检测结果,确定目标检测结果的具体实施方式为:从剩余的(N-M)个子检测结果中,选择准确度最高、或者最大、或者最小的子检测结果,作为目标检测结果。In one implementation, according to the remaining (NM) sub-detection results, the specific implementation manner for determining the target detection result is: from the remaining (NM) sub-detection results, select the sub-detection with the highest accuracy, or the largest, or the smallest The detection result is used as the target detection result.
第二方面,本发明实施例提供了一种图像检测设备,所述图像检测设备包括:In a second aspect, an embodiment of the present invention provides an image detection device, and the image detection device includes:
广角相机,用于获取广角图像;Wide-angle camera, used to obtain wide-angle images;
存储器,用于存储计算机程序;Memory, used to store computer programs;
处理器,调用计算机程序,用于执行以下操作:The processor, which calls a computer program, is used to perform the following operations:
将广角图像转换为N张子图像,子图像为非广角图像,广角图像中包含有待检测目标,N大于或等于2;对每张子图像进行三维目标检测,得到N个对应于待检测目标的子检测结果;根据N个子检测结果输出目标检测结果,目标检测结果包括待检测目标的三维信息。Convert the wide-angle image into N sub-images. The sub-images are non-wide-angle images. The wide-angle image contains the target to be detected, and N is greater than or equal to 2. Perform three-dimensional target detection on each sub-image to obtain N corresponding to the target to be detected. Sub-detection results: output target detection results according to the N sub-detection results, and the target detection results include the three-dimensional information of the target to be detected.
第三方面,本申请实施例提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序在被执行时,实现如第一方面所述的图像检测方法。In a third aspect, an embodiment of the present application provides a computer-readable storage medium with a computer program stored on the computer-readable storage medium, and the computer program, when executed, implements the image detection method as described in the first aspect .
本发明实施例中,先将包含有待检测目标的广角图像转换为N张非广角图像的子图像,再对每张子图像进行三维目标检测,得到N个对应于待检测目标的子检测结果,最后根据N个子检测结果输出目标检测结果。该方式可以提高针对广角图像的三维目标检测的准确度。In the embodiment of the present invention, the wide-angle image containing the target to be detected is first converted into N sub-images of the non-wide-angle image, and then three-dimensional target detection is performed on each sub-image to obtain N sub-detection results corresponding to the target to be detected. Finally, the target detection result is output according to the N sub-detection results. This method can improve the accuracy of 3D target detection for wide-angle images.
为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。In order to explain the embodiments of the present application or the technical solutions in the prior art more clearly, the following will briefly introduce the drawings that need to be used in the embodiments. Obviously, the drawings in the following description are only some of the present application. Embodiments, for those of ordinary skill in the art, without creative work, other drawings can be obtained based on these drawings.
图1为本发明实施例提供的一种图像检测系统的架构示意图;FIG. 1 is a schematic diagram of the architecture of an image detection system provided by an embodiment of the present invention;
图2为本发明实施例提供的一种图像检测设备的应用场景示意图;2 is a schematic diagram of an application scenario of an image detection device provided by an embodiment of the present invention;
图3为本发明实施例提供的一种图像检测方法的流程示意图;FIG. 3 is a schematic flowchart of an image detection method provided by an embodiment of the present invention;
图4为本发明实施例提供的另一种图像检测方法的流程示意图;4 is a schematic flowchart of another image detection method provided by an embodiment of the present invention;
图5a为本发明实施例提供的一种广角图像中子区域的确定方法示意图;5a is a schematic diagram of a method for determining sub-regions in a wide-angle image according to an embodiment of the present invention;
图5b为本发明实施例提供的另一种广角图像中子区域的确定方法示意 图;Figure 5b is a schematic diagram of another method for determining sub-regions in a wide-angle image according to an embodiment of the present invention;
图6为本发明实施例提供的一种子图像确定方法的示意图;FIG. 6 is a schematic diagram of a method for determining a sub-image according to an embodiment of the present invention;
图7为本发明实施例提供的一种广角图像的示意图;FIG. 7 is a schematic diagram of a wide-angle image provided by an embodiment of the present invention;
图8为本发明实施例提供的一种子检测结果的示意图;FIG. 8 is a schematic diagram of a sub-detection result provided by an embodiment of the present invention;
图9为本发明实施例提供的一种图像检测设备的结构示意图。FIG. 9 is a schematic structural diagram of an image detection device provided by an embodiment of the present invention.
下面将结合本申请实施例中的附图,对本申请实施例进行阐述。The embodiments of the present application will be described below in conjunction with the drawings in the embodiments of the present application.
目前,没有与广角图像对应的三维目标检测算法,且直接使用非广角图像的三维目标检测算法对广角图像进行三维目标检测,会降低检测结果的准确度。本发明实施例提出一种图像检测方法,图像检测设备先将广角图像转换为N张子图像,子图像为非广角图像,广角图像包含有待检测目标,N大于或等于2;然后使用非广角图像的三维目标检测算法对每张子图像进行三维目标检测,得到N个对应于待检测目标的子检测结果;最后根据N个子检测结果输出目标检测结果,目标检测结果包括待检测目标的三维信息。该方法通过将广角图像转换为非广角图像的子图像,再使用非广角图像的三维目标检测算法对子图像进行三维目标检测的方式,得到广角图像中待检测目标的目标检测结果,可提高广角图像的三维目标检测的准确度。At present, there is no three-dimensional target detection algorithm corresponding to the wide-angle image, and the direct use of the non-wide-angle image three-dimensional target detection algorithm to perform the three-dimensional target detection on the wide-angle image will reduce the accuracy of the detection result. An embodiment of the present invention provides an image detection method. The image detection device first converts a wide-angle image into N sub-images, the sub-images are non-wide-angle images, and the wide-angle image contains the target to be detected, and N is greater than or equal to 2; then the non-wide-angle image is used The three-dimensional target detection algorithm performs three-dimensional target detection on each sub-image, and obtains N sub-detection results corresponding to the target to be detected; finally, the target detection result is output according to the N sub-detection results, and the target detection result includes the three-dimensional information of the target to be detected. This method converts the wide-angle image into a sub-image of a non-wide-angle image, and then uses the non-wide-angle image's three-dimensional target detection algorithm to perform three-dimensional target detection on the sub-image to obtain the target detection result of the target to be detected in the wide-angle image, which can improve the wide-angle The accuracy of the image's three-dimensional target detection.
请参见图1,图1是本发明实施例提供的一种图像检测系统的架构示意图。如图1所示,该图像检测系统由广角相机101和图像检测设备102组成。广角相机101安装于车辆上,用于获取所述车辆周围环境的广角图像。图像检测设备102用于对广角相机101获取到的广角图像进行三维目标检测,输出待检测目标的目标检测结果。Please refer to FIG. 1. FIG. 1 is a schematic structural diagram of an image detection system provided by an embodiment of the present invention. As shown in FIG. 1, the image detection system is composed of a wide-
在一种实现方式中,图像检测设备可以从外部的图像输出设备获取广角图像,所述图像输出设备用于输出广角图像。比如,图像输出设备输出一张广角图像,此广角图像需要被图像检测设备对其中的待检测目标进行检测,因此图像输出设备将此广角图像传到图像检测设备,图像检测设备获得了所述广角图像。In an implementation manner, the image detection device may obtain a wide-angle image from an external image output device, and the image output device is used to output the wide-angle image. For example, the image output device outputs a wide-angle image, and the wide-angle image needs to be detected by the image detection device for the target to be detected. Therefore, the image output device transmits the wide-angle image to the image detection device, and the image detection device obtains the wide-angle image. image.
可选的,图像检测设备可以包括图像输出装置,所述图像输出装置可以包括鱼眼镜头等,图像输出装置用于输出广角图像,因此图像检测设备可以从所述图像检测设备中的图像输出装置获得广角图像。比如,图像检测设备为如图2所示的无人驾驶汽车A,图像输出装置为无人驾驶汽车中的鱼眼镜头,鱼眼镜头安装在无人驾驶汽车的后视镜中,无人驾驶汽车A在图2所示的场景中行驶时,可触发鱼眼镜头,拍摄一张广角图像A,广角图像A中包括无人驾驶汽车的周围环境状况。无人驾驶汽车A获得广角图像A后,对广角图像A中的待检测目标进行检测,并输出待检测目标的目标检测结果,从而无人驾驶汽车A根据目标检测结果实现对待检测目标的避障或路径规划等功能。Optionally, the image detection device may include an image output device, the image output device may include a fisheye lens, etc., and the image output device is used to output a wide-angle image, so the image detection device may be obtained from the image output device in the image detection device Wide-angle image. For example, the image detection equipment is the driverless car A shown in Figure 2, and the image output device is a fisheye lens in the driverless car. The fisheye lens is installed in the rearview mirror of the driverless car. When the car A is driving in the scene shown in Fig. 2, the fisheye lens can be triggered to take a wide-angle image A, and the wide-angle image A includes the surrounding environment conditions of the driverless car. After the driverless car A obtains the wide-angle image A, it detects the target to be detected in the wide-angle image A, and outputs the target detection result of the target to be detected, so that the driverless car A realizes obstacle avoidance of the target to be detected according to the target detection result Or path planning and other functions.
可选的,本申请所述的图像检测方法还可适用于其他可移动平台,如无人驾驶车辆或自动驾驶车辆、机器人、无人机、无人车或者无人船等图像检测设备中,本申请实施例对此不作限定。Optionally, the image detection method described in this application can also be applied to other movable platforms, such as image detection equipment such as unmanned vehicles or autonomous vehicles, robots, unmanned aerial vehicles, unmanned vehicles, or unmanned ships. The embodiment of the application does not limit this.
广角图像具有超大的视场,为具有畸变的图像,广角图像可以包括鱼眼图像等。非广角图像为正常相机所拍摄的图像,非广角图像可以包括小孔成像图像等。The wide-angle image has a large field of view and is an image with distortion. The wide-angle image may include fish-eye images. The non-wide-angle image is an image taken by a normal camera, and the non-wide-angle image may include a pinhole imaging image.
基于上述描述,本发明实施例提出一种如图3所示的图像检测方法,该图像检测方法可以包括S301-S303:Based on the foregoing description, an embodiment of the present invention proposes an image detection method as shown in FIG. 3, and the image detection method may include S301-S303:
S301:图像检测设备将广角图像转换为N张子图像。S301: The image detection device converts the wide-angle image into N sub-images.
图像检测设备获得广角图像后,将所述广角图像转换为N张子图像,广角图像中包含有待检测目标,待检测目标为图像检测设备确定的,所述N大于或等于2,任一子图像包含有待检测目标的部分信息。通过该方式,图像检测设备将广角图像转换为了N张非广角子图像,为后续使用非广角图像的三维目标检测算法提供了可能。After the image detection device obtains the wide-angle image, it converts the wide-angle image into N sub-images. The wide-angle image contains the target to be detected. The target to be detected is determined by the image detection device. The N is greater than or equal to 2, any sub-image. Contains part of the information about the target to be detected. In this way, the image detection device converts the wide-angle image into N non-wide-angle sub-images, which provides the possibility for the subsequent use of the three-dimensional target detection algorithm of the non-wide-angle image.
S302:图像检测设备对每张子图像进行三维目标检测,得到N个对应于待检测目标的子检测结果。S302: The image detection device performs three-dimensional target detection on each sub-image, and obtains N sub-detection results corresponding to the target to be detected.
图像检测设备将广角图像转换为N张子图像之后,对每张子图像进行三维目标检测,得到N个对应于待检测目标的子检测结果。其中,对每张子图 像进行三维目标检测的检测算法为单目图像的三维目标检测算法,比如卷积神经网络算法、特征空间算法等等,在此不做限定。After the image detection device converts the wide-angle image into N sub-images, three-dimensional target detection is performed on each sub-image, and N sub-detection results corresponding to the target to be detected are obtained. Among them, the detection algorithm for the three-dimensional target detection of each sub-image is the three-dimensional target detection algorithm of the monocular image, such as convolutional neural network algorithm, feature space algorithm, etc., which are not limited here.
S303:图像检测设备根据N个子检测结果输出目标检测结果。S303: The image detection device outputs a target detection result according to the N sub-detection results.
图像检测设备根据N个子检测结果输出目标检测结果,目标检测结果即为所述待检测目标的检测结果,所述目标检测结果包括所述待检测目标的三维信息。待检测目标的三维信息包括待检测目标的类别、待检测目标在三维空间中的位置、待检测目标的物理尺寸以及朝向。The image detection device outputs a target detection result according to the N sub-detection results. The target detection result is the detection result of the target to be detected, and the target detection result includes the three-dimensional information of the target to be detected. The three-dimensional information of the object to be detected includes the category of the object to be detected, the position of the object to be detected in the three-dimensional space, and the physical size and orientation of the object to be detected.
在本发明实施例中,图像检测设备通过将广角图像转换为N张非广角图像,并根据N张非广角图像的子检测结果得到目标检测结果的方式,获得了广角图像中待检测目标的检测结果。比起直接在广角图像上使用非广角图像的三维目标检测算法进行检测,本申请实施例所述的图像检测方法可提高三维目标检测的准确度。In the embodiment of the present invention, the image detection device obtains the detection of the target to be detected in the wide-angle image by converting the wide-angle image into N non-wide-angle images, and obtaining the target detection result according to the sub-detection results of the N non-wide-angle images. result. Compared with directly using a three-dimensional target detection algorithm for non-wide-angle images to perform detection on a wide-angle image, the image detection method described in the embodiments of the present application can improve the accuracy of three-dimensional target detection.
请参见图4,图4是本发明实施例提供的另一种图像检测方法的流程示意图,该方法包括但不限于S401-S411:Please refer to FIG. 4, which is a schematic flowchart of another image detection method provided by an embodiment of the present invention. The method includes but is not limited to S401-S411:
S401:图像检测设备确定广角图像的N个子区域。S401: The image detection device determines N sub-regions of the wide-angle image.
其中,广角图像可以包括鱼眼图像,且广角图像中包含有待检测目标,待检测目标为图像检测设备确定的,所述广角图像的来源和S201中相同,在此不再赘述。The wide-angle image may include a fish-eye image, and the wide-angle image contains a target to be detected, which is determined by the image detection device. The source of the wide-angle image is the same as that in S201, and will not be repeated here.
图像检测设备获取到广角图像后,先确定广角图像中的待检测目标,然后根据待检测目标确定所述广角图像的N个子区域,每个区域都包含有待检测目标的部分信息。在一种实现方式中,图像检测设备确定的广角图像的N个子区域存在重叠部分。图像检测设备可以对每个子区域设定一个虚拟相机,虚拟相机包括预设的相机参数,相机参数包括焦距、光心坐标等等,可以通过调整每个区域对应的虚拟相机的坐标位置来确定每个子区域,以避免广角图像中的待检测目标被完全截断,从而使得子区域存在重叠部分。比如,图5a所示的广角图像B为行驶汽车中的鱼眼镜头拍摄得到的鱼眼图像,鱼眼镜头安装于行驶汽车的后视镜中,鱼眼图像具有鱼眼畸变。广角图像B的子区域的确定方式如图5a所示,广角图像B中的待检测目标为汽车B,图像检测设备将 广角图像B分为了两个如图5a所示的子区域,包括子区域A和子区域B。子区域A和子区域B中都包含有待检测目标汽车B的部分信息,且两个子区域存在重叠部分,重叠部分为重叠区域M。After acquiring the wide-angle image, the image detection device first determines the object to be detected in the wide-angle image, and then determines the N sub-areas of the wide-angle image according to the object to be detected, and each area contains partial information of the object to be detected. In an implementation manner, the N sub-regions of the wide-angle image determined by the image detection device have overlapping parts. The image detection device can set a virtual camera for each sub-area. The virtual camera includes preset camera parameters. The camera parameters include focal length, optical center coordinates, etc., which can be determined by adjusting the coordinate position of the virtual camera corresponding to each area. In order to avoid the target to be detected in the wide-angle image from being completely cut off, so that there are overlapping parts in the sub-regions. For example, the wide-angle image B shown in FIG. 5a is a fisheye image taken by a fisheye lens in a driving car. The fisheye lens is installed in the rearview mirror of a driving car, and the fisheye image has fisheye distortion. The method for determining the sub-regions of the wide-angle image B is shown in Figure 5a. The object to be detected in the wide-angle image B is car B. The image detection device divides the wide-angle image B into two sub-regions as shown in Figure 5a, including sub-regions. A and sub-area B. Both sub-region A and sub-region B contain partial information of the target car B to be detected, and the two sub-regions have overlapping parts, and the overlapping part is the overlapping region M.
可选的,图像检测设备确定的广角图像的N个子区域不存在重叠部分。比如,广角图像B的子区域的确定方式还可以如图5b所示,广角图像B中的待检测目标为汽车B,图像检测设备将广角图像B分为了三个如图5b所示的子区域,包括子区域C、子区域D和子区域E。子区域C、子区域D和子区域E都包含有待检测目标汽车B的部分信息,且每个子区域不存在重叠部分。Optionally, there is no overlapping part in the N sub-regions of the wide-angle image determined by the image detection device. For example, the method for determining the sub-region of the wide-angle image B can also be shown in Figure 5b. The object to be detected in the wide-angle image B is car B. The image detection device divides the wide-angle image B into three sub-regions as shown in Figure 5b. , Including sub-region C, sub-region D and sub-region E. The sub-region C, the sub-region D, and the sub-region E all contain part of the information of the target car B to be detected, and there is no overlapping part in each sub-region.
S402:图像检测设备对广角图像的N个子区域进行重投影,得到N个子图像。S402: The image detection device reprojects the N sub-regions of the wide-angle image to obtain N sub-images.
具体的,图像检测设备对每个子区域,设定一个虚拟相机,虚拟相机包括预设的相机参数,相机参数包括焦距、光心坐标等等;然后根据每个子区域对应的虚拟相机的相机参数和投影方式,对广角图像的N个子区域进行重投影,得到N个子图像。虚拟相机的投影方式包括小孔成像投影方式。Specifically, the image detection device sets a virtual camera for each sub-area. The virtual camera includes preset camera parameters. The camera parameters include focal length, optical center coordinates, etc.; and then according to the camera parameters of the virtual camera corresponding to each sub-area and The projection method reprojects the N sub-regions of the wide-angle image to obtain N sub-images. The projection method of the virtual camera includes a small hole imaging projection method.
在一种实现方式中,图像检测设备根据每个子区域对应的虚拟相机的相机参数和投影方式,对广角图像的N个子区域进行重投影的具体方式为:图像检测设备获取广角图像中每个子区域的各个像素点对应的三维坐标,根据每个子区域虚拟相机的相机参数和投影方式对该区域每个像素点的三维坐标进行重投影,得到N张子图像。In one implementation, the image detection device reprojects the N sub-regions of the wide-angle image according to the camera parameters and projection mode of the virtual camera corresponding to each sub-region: the image detection device acquires each sub-region in the wide-angle image The three-dimensional coordinates corresponding to each pixel point in each sub-area are reprojected according to the camera parameters and projection mode of the virtual camera of each sub-area to obtain N sub-images.
示例性的,图像检测设备确定的广角图像B的子区域如图5a所示,广角图像B为鱼眼图像,在鱼眼图像中,原本笔直的车身是弯曲的,广角图像B的子图像确定方法如图6所示。图像检测设备先分别对子区域A和子区域B设定一个虚拟相机,分别为虚拟相机A和虚拟相机B,并确定虚拟相机A和虚拟相机B的相机参数和投影方式,虚拟相机A和虚拟相机B的投影方式为小孔成像投影方式。然后,图像检测设备获取子区域A的各个像素点对应的三维坐标,再根据虚拟相机A的相机参数和投影方式,对子区域A的各个像素点进行重投影,得到如图6中所示的子图像A。图像检测设备获取子区域B的各个像素点对应的三维坐标,根据虚拟相机B的相机参数和投影方式,对子区域B的各个像素点进行重投影,得到如图6中所示的子图像B。从图6 可以看出,图像检测设备将具有畸变的广角图像B转换为了两张不存在畸变的非广角图像,即子图像A和子图像B,子图像A和子图像B都包含有待检测目标,即汽车B。子图像A和子图像B为小孔成像的图像,因此在子图像A和子图像B中,原本笔直的车身仍然保持笔直。Exemplarily, the sub-region of the wide-angle image B determined by the image detection device is shown in Fig. 5a. The wide-angle image B is a fish-eye image. In the fish-eye image, the originally straight car body is curved, and the sub-image of the wide-angle image B is determined The method is shown in Figure 6. The image detection device first sets a virtual camera for sub-area A and sub-area B respectively, namely virtual camera A and virtual camera B, and determines the camera parameters and projection methods of virtual camera A and virtual camera B, virtual camera A and virtual camera The projection method of B is the small hole imaging projection method. Then, the image detection device obtains the three-dimensional coordinates corresponding to each pixel of the sub-area A, and then reprojects each pixel of the sub-area A according to the camera parameters and projection mode of the virtual camera A, and obtains as shown in FIG. 6 Sub image A. The image detection device obtains the three-dimensional coordinates corresponding to each pixel of the sub-area B, and reprojects each pixel of the sub-area B according to the camera parameters and projection mode of the virtual camera B to obtain the sub-image B as shown in FIG. 6 . It can be seen from Figure 6 that the image detection device converts the distorted wide-angle image B into two non-distorted non-wide-angle images, namely sub-image A and sub-image B. Both sub-image A and sub-image B contain the target to be detected, namely Car B. The sub-image A and the sub-image B are the images formed by the small holes. Therefore, in the sub-image A and the sub-image B, the originally straight vehicle body remains straight.
S403:图像检测设备对每张子图像进行三维目标检测,得到N个对应于待检测目标的子检测结果。S403: The image detection device performs three-dimensional target detection on each sub-image, and obtains N sub-detection results corresponding to the target to be detected.
图像检测设备得到N张子图像后,使用三维目标检测算法对每张子图像进行三维目标检测,得到N个对应于待检测目标的子检测结果。其中,三维目标检测算法为单目图像的三维目标检测算法,包括卷积神经网络算法、特征空间算法等等。例如,图像检测设备使用卷积神经网络算法对子图像中的待检测目标进行特征提取,从提取出来的特征估计得到待检测目标对应的类别、外接矩形和三维坐标位置等。After the image detection device obtains N sub-images, it uses a three-dimensional target detection algorithm to perform three-dimensional target detection on each sub-image, and obtain N sub-detection results corresponding to the target to be detected. Among them, the three-dimensional target detection algorithm is a three-dimensional target detection algorithm for monocular images, including convolutional neural network algorithms, feature space algorithms, and so on. For example, the image detection device uses a convolutional neural network algorithm to extract features of the object to be detected in the sub-image, and estimate the category, circumscribed rectangle, and three-dimensional coordinate position of the object to be detected from the extracted features.
在一种实现方式中,若广角图像中只包含一个待检测目标,不包含与待检测目标相似的其他目标,图像检测设备先使用三维目标检测算法对每张子图像进行三维目标检测,得到N个检测结果,由于广角图像只包含一个待检测目标,所以得到的每张子图像的检测结果都是对应于待检测目标的子检测结果,因此直接将每个检测结果作为对应于待检测目标的子检测结果。In one implementation, if the wide-angle image contains only one target to be detected and does not contain other targets similar to the target to be detected, the image detection device first uses a three-dimensional target detection algorithm to perform three-dimensional target detection on each sub-image to obtain N Because the wide-angle image contains only one target to be detected, the detection result of each sub-image is the sub-detection result corresponding to the target to be detected. Therefore, each detection result is directly regarded as the target corresponding to the target to be detected. Sub-test results.
示例性的,广角图像B如图5a所示,图像检测设备确定广角图像B中的待检测目标为汽车B,可以看出广角图像B中只包含一个待检测目标汽车B,图像检测设备得到的子图像如图6所示,为子图像A和子图像B,图像检测设备对子图像A进行三维目标检测,得到关于子图像A的检测结果A,该检测结果A中只包含待检测目标汽车B的部分信息,因此将检测结果A作为对应于待检测目标汽车B的子检测结果,图像检测设备对子图像B进行三维目标检测,得到关于子图像B的检测结果B,该检测结果B中也只包含待检测目标汽车B的部分信息,因此将检测结果B作为对应于待检测目标汽车B的子检测结果。因此,图像检测设备对广角图像B对应的的子图像A和子图像B进行三维目标检测,得到的对应于待检测目标汽车B的子检测结果为检测结果A和检测结果B。Exemplarily, the wide-angle image B is shown in Fig. 5a. The image detection device determines that the object to be detected in the wide-angle image B is car B. It can be seen that the wide-angle image B contains only one object to be detected, which is obtained by the image detection device. The sub-images are shown in Figure 6, which are sub-image A and sub-image B. The image detection device performs three-dimensional target detection on sub-image A, and obtains the detection result A of sub-image A. The detection result A contains only the target car B to be detected. Therefore, the detection result A is used as the sub-detection result corresponding to the target car B to be detected. The image detection device performs three-dimensional target detection on the sub-image B, and obtains the detection result B of the sub-image B. The detection result B is also Only part of the information of the target car B to be detected is included, so the detection result B is taken as the sub-detection result corresponding to the target car B to be detected. Therefore, the image detection device performs three-dimensional target detection on the sub-image A and the sub-image B corresponding to the wide-angle image B, and the obtained sub-detection results corresponding to the target car B to be detected are the detection result A and the detection result B.
在一种实现方式中,若广角图像中包含待检测目标和多个与待检测目标相似的其他目标,图像检测设备先使用三维目标检测算法对每张子图像进行三维目标检测,得到N个检测结果,由于广角图像中包含有多个与待检测目标相似的目标,则每个检测结果包含多个子检测结果,一部分子检测结果对应的是待检测目标的子检测结果,一部分子检测结果对应的是与待检测目标相似的目标的子检测结果,因此需要从每个子检测结果中确定出与待检测目标对应的子检测结果。具体的,图像检测设备计算每个检测结果中各子检测结果分别与其他N-1个检测结果中各子检测结果之间的重叠度,将每个检测结果中重叠度大于第一预设阈值的子检测结果,作为对应于待检测目标的子检测结果,第一预设阈值为图像检测设备提前设置的。当每个检测结果中各子检测结果分别与其他N-1个检测结果中各子检测结果之间的重叠度大于第一预设阈值时,表明该子检测结果为待检测目标的检测结果,而不为与待检测目标相似的目标的检测结果,因此图像检测设备将该子检测结果作为对应于待检测目标的子检测结果。通过该方式,可以确保图像检测设备得到的子检测结果为对应于待检测目标的子检测结果,可提高N个子检测结果的可靠性。In one implementation, if the wide-angle image contains the target to be detected and multiple other targets similar to the target to be detected, the image detection device first uses a three-dimensional target detection algorithm to perform three-dimensional target detection on each sub-image to obtain N detections As a result, since the wide-angle image contains multiple targets similar to the target to be detected, each detection result contains multiple sub-detection results, some of the sub-detection results correspond to the sub-detection results of the target to be detected, and some sub-detection results correspond to the sub-detection results of the target to be detected. It is a sub-detection result of a target similar to the target to be detected, so it is necessary to determine the sub-detection result corresponding to the target to be detected from each sub-detection result. Specifically, the image detection device calculates the degree of overlap between each sub-detection result in each detection result and each sub-detection result in the other N-1 detection results, and sets the degree of overlap in each detection result to be greater than the first preset threshold. As the sub-detection result corresponding to the target to be detected, the first preset threshold is set in advance by the image detection device. When the degree of overlap between each sub-detection result in each detection result and each sub-detection result in the other N-1 detection results is greater than the first preset threshold, it indicates that the sub-detection result is the detection result of the target to be detected. It is not a detection result of a target similar to the target to be detected, so the image detection device uses the sub-detection result as the sub-detection result corresponding to the target to be detected. In this way, it can be ensured that the sub-detection result obtained by the image detection device is the sub-detection result corresponding to the target to be detected, and the reliability of the N sub-detection results can be improved.
示例性的,广角图像C及其子区域如图7所示,广角图像C是在图7后方行驶的汽车M中的鱼眼镜头拍摄得到的鱼眼图像,鱼眼镜头安装在汽车M中,因此广角图像C为汽车M的前方的图像。汽车M图像检测设备确定广角图像中的待检测目标为汽车C,所述广角图像中包含待检测目标汽车C和多个与汽车C相似的目标,为疑似目标A、疑似目标B、疑似目标C、疑似目标D、疑似目标E、图疑似目标F和疑似目标G。当图像检测设备对广角图像C中的子区域A对应的子图像A进行三维目标检测时,得到第一检测结果,当图像检测设备对广角图像C中的子区域B对应的子图像B进行三维目标检测时,得到第二检测结果,第一检测结果和第二检测结果的可视化图分别由图7中的各个黑框表示。第一检测结果包括疑似目标A的子检测结果、疑似目标B的子检测结果、疑似目标C的子检测结果和待检测目标汽车C的子检测结果,第二检测结果包括疑似目标D的子检测结果、疑似目标E的子检测结果、疑似目标F的子检测结果、疑似目标G的子检测结果和待检测目标汽车C的子检测结果,此时图像检测设备计算第一检测结果中的各个子检测结果与第二检 测结果中每个子检测结果的重叠度,若第一预设阈值为广角图像中子区域A和子区域B的重叠度,则在各个子检测结果中只有包含有待测目标汽车C的子检测结果满足条件,因此图像检测设备能确定出对应于待检测目标汽车C的两个子检测结果。Exemplarily, the wide-angle image C and its sub-regions are shown in FIG. 7. The wide-angle image C is a fish-eye image taken by a fish-eye lens in a car M driving behind in FIG. 7, and the fish-eye lens is installed in the car M. Therefore, the wide-angle image C is an image in front of the car M. The car M image detection device determines that the target to be detected in the wide-angle image is car C, and the wide-angle image contains the target car C to be detected and multiple targets similar to car C, which are suspected target A, suspected target B, and suspected target C , Suspected target D, suspected target E, figure suspected target F and suspected target G. When the image detection device performs three-dimensional target detection on the sub-image A corresponding to the sub-area A in the wide-angle image C, the first detection result is obtained, and when the image detection device performs three-dimensional target detection on the sub-image B corresponding to the sub-area B in the wide-angle image C When the target is detected, the second detection result is obtained, and the visualization diagrams of the first detection result and the second detection result are respectively represented by the black boxes in FIG. 7. The first detection result includes the sub-detection result of the suspected target A, the sub-detection result of the suspected target B, the sub-detection result of the suspected target C and the sub-detection result of the target car C to be detected, and the second detection result includes the sub-detection result of the suspected target D Result, the sub-detection result of the suspected target E, the sub-detection result of the suspected target F, the sub-detection result of the suspected target G, and the sub-detection result of the target car C to be detected. At this time, the image detection device calculates each sub-detection result of the first detection result. The degree of overlap between the detection result and each sub-detection result in the second detection result. If the first preset threshold is the degree of overlap between sub-region A and sub-region B in the wide-angle image, only the target vehicle to be tested is included in each sub-detection result The sub-detection result of C satisfies the condition, so the image detection device can determine two sub-detection results corresponding to the target car C to be detected.
S404:图像检测设备将N个子检测结果进行合并处理,得到目标检测结果。S404: The image detection device merges the N sub-detection results to obtain a target detection result.
由于图像检测设备得到的每个子图像中都包含有待检测目标的部分信息,因此得到的子检测结果中,会存在关于待检测目标的重叠检测结果。比如,图8为在图6所示的子图像A和子图像B中,待检测目标汽车B的检测结果示意图,从图8中可以看出,两个子检测结果对应的俯视图存在重叠部分,重叠部分为区域a。因此图像检测设备需要把两个检测结果进行合并处理,得到关于待检测目标的一个目标检测结果,目标检测结果包括待检测目标的三维信息,三维信息包括待检测目标的类别、待检测目标在三维空间中的位置、待检测目标的物理尺寸以及朝向,待检测目标的物理尺寸包括待检测目标的长、宽、高。Since each sub-image obtained by the image detection device contains part of the information of the target to be detected, the sub-detection results obtained include overlapping detection results about the target to be detected. For example, FIG. 8 is a schematic diagram of the detection results of the target vehicle B to be detected in the sub-image A and the sub-image B shown in FIG. 6. As can be seen from FIG. 8, the top views corresponding to the two sub-detection results have overlapping parts. For area a. Therefore, the image detection equipment needs to merge the two detection results to obtain a target detection result about the target to be detected. The target detection result includes the three-dimensional information of the target to be detected. The three-dimensional information includes the category of the target to be detected and the target is in three dimensions. The position in the space, the physical size and orientation of the object to be detected, and the physical size of the object to be detected includes the length, width, and height of the object to be detected.
具体的,图像检测设备得到N个对应于待检测目标的子检测结果后,计算N个子检测结果中每个子检测结果分别与其他N-1个子检测结果之间的重叠度;从N个子检测结果中,去除平均重叠度小于第二预设阈值的M子检测结果,每个子检测结果的平均重叠度为所述每个子检测结果对应的N-1个重叠度的平均值,M大于或等于0,第二预设阈值为图像检测设备提前设置的;根据剩余的(N-M)个子检测结果,确定目标检测结果。该方式可以将N个子检测结果进行合并,得到包含待检测目标的一个目标检测结果。Specifically, after the image detection device obtains N sub-detection results corresponding to the target to be detected, it calculates the degree of overlap between each sub-detection result of the N sub-detection results and the other N-1 sub-detection results; from the N sub-detection results , Remove M sub-detection results whose average degree of overlap is less than the second preset threshold, and the average degree of overlap of each sub-detection result is the average value of N-1 overlap degrees corresponding to each sub-detection result, and M is greater than or equal to 0 The second preset threshold is set in advance by the image detection device; the target detection result is determined according to the remaining (NM) sub-detection results. In this way, N sub-detection results can be combined to obtain a target detection result containing the target to be detected.
在一种实现方式中,图像检测设备根据剩余的(N-M)个子检测结果,确定目标检测结果的具体方式为:得到剩余的(N-M)个子检测结果后,计算剩余的(N-M)个子检测结果的平均值,将剩余的(N-M)个子检测结果的平均值作为目标检测结果。In an implementation manner, the specific method for the image detection device to determine the target detection result based on the remaining (NM) sub-detection results is: after obtaining the remaining (NM) sub-detection results, calculate the remaining (NM) sub-detection results Average value, the average value of the remaining (NM) sub-detection results is used as the target detection result.
在一种实现方式中,图像检测设备根据剩余的(N-M)个子检测结果,确定目标检测结果的具体实施方式为:得到剩余的(N-M)个子检测结果后,从剩余的(N-M)个子检测结果中,选择准确度最高、或者检测值最大、或者检 测值最小的子检测结果,作为目标检测结果,准确度由三维目标检测算法决定,检测值最大的子检测结果指待检测目标的三维信息中的物理尺寸最大的子检测结果,检测值最小的子检测结果指待检测目标的三维信息中物理尺寸最小的子检测结果。In an implementation manner, the image detection device determines the target detection result according to the remaining (NM) sub-detection results. A specific implementation manner is: after obtaining the remaining (NM) sub-detection results, from the remaining (NM) sub-detection results Select the sub-detection result with the highest accuracy, or the largest detection value, or the smallest detection value as the target detection result. The accuracy is determined by the three-dimensional target detection algorithm. The sub-detection result with the largest detection value refers to the three-dimensional information of the target to be detected. The sub-detection result with the largest physical size, and the sub-detection result with the smallest detection value refers to the sub-detection result with the smallest physical size in the three-dimensional information of the target to be detected.
在本发明实施例中,图像检测设备将广角图像展开成N个非广角图像的子图像,再对每个子图像进行三维目标检测,得到N个对应于待检测目标的子检测结果,最后根据每个对应于待检测目标的子检测结果,输出目标检测结果,实现了对广角图像中待检测目标的三维目标检测,该方式可提高三维目标检测的准确度。In the embodiment of the present invention, the image detection device expands the wide-angle image into N sub-images of non-wide-angle images, and then performs three-dimensional target detection on each sub-image to obtain N sub-detection results corresponding to the target to be detected. A sub-detection result corresponding to the target to be detected is output, the target detection result is output, and the three-dimensional target detection of the target to be detected in the wide-angle image is realized. This method can improve the accuracy of the three-dimensional target detection.
请参见图9,图9是本发明实施例提供的一种图像检测设备的结构示意图,本发明实施例中所描述的图像检测设备90,包括:处理器901、存储器902和广角相机903,所述广角相机903用于输出广角图像,处理器901、存储器902和广角相机903通过一条或多条通信总线连接。Please refer to FIG. 9, which is a schematic structural diagram of an image detection device provided by an embodiment of the present invention. The
上述处理器901可以是中央处理单元(Central Processing Unit,CPU),该处理器还可以是其他通用处理器、数字信号处理器(Digital Signal Processor,DSP)、专用集成电路(Application Specific Integrated Circuit,ASIC)、现成可编程门阵列(Field-Programmable Gate Array,FPGA)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等,处理器可以是车载计算平台。处理器901被配置为支持图像检测设备执行图3或图4所述方法中图像检测设备相应的功能。The above-mentioned
上述存储器902可以包括只读存储器和随机存取存储器,并向处理器901提供计算机程序和数据。存储器902的一部分还可以包括非易失性随机存取存储器。其中,所述处理器901调用所述计算机程序时用于执行:The
将广角图像转换为N张子图像,子图像为非广角图像,广角图像中包含有待检测目标,N大于或等于2;Convert the wide-angle image into N sub-images, the sub-images are non-wide-angle images, the wide-angle image contains the target to be detected, and N is greater than or equal to 2;
对每张子图像进行三维目标检测,得到N个对应于待检测目标的子检测结果;Perform three-dimensional target detection on each sub-image, and obtain N sub-detection results corresponding to the target to be detected;
根据N个子检测结果输出目标检测结果,目标检测结果包括待检测目标的三维信息。The target detection result is output according to the N sub-detection results, and the target detection result includes the three-dimensional information of the target to be detected.
在一种实现方式中,广角图像包括鱼眼图像。In one implementation, the wide-angle image includes a fisheye image.
在一种实现方式中,非广角图像包括小孔成像图像。In one implementation, the non-wide-angle image includes a pinhole imaging image.
在一种实现方式中,三维信息包括待检测目标的类别、待检测目标在三维空间中的位置、待检测目标的物理尺寸以及朝向。In an implementation manner, the three-dimensional information includes the category of the object to be detected, the position of the object to be detected in the three-dimensional space, and the physical size and orientation of the object to be detected.
在一种实现方式中,处理器901,还用于确定广角图像的N个子区域;处理器901,还用于对广角图像的N个子区域进行重投影,得到N个子图像。In an implementation manner, the
在一种实现方式中,N个子区域存在重叠部分。In one implementation, the N sub-regions have overlapping parts.
在一种实现方式中,处理器901,还用于将广角图像分割成N个子区域;N个子区域不存在重叠部分。In an implementation manner, the
在一种实现方式中,处理器901,还用于对每个子区域,设定一个虚拟相机,虚拟相机包括预设的相机参数;处理器901,还用于根据每个子区域虚拟相机的相机参数和投影方式,对广角图像的N个子区域进行重投影,得到N个子图像。In an implementation manner, the
在一种实现方式中,处理器901,还用于对每张子图像进行三维目标检测,得到N个检测结果;处理器901,还用于计算每个检测结果中各子检测结果分别与其他N-1个检测结果中各子检测结果之间的重叠度;处理器901,还用于将每个检测结果中重叠度大于第一预设阈值的子检测结果,作为对应于待检测目标的子检测结果。In one implementation, the
在一种实现方式中,处理器901,还用于将N个子检测结果进行合并处理,得到目标检测结果。In an implementation manner, the
在一种实现方式中,处理器901,还用于计算N个子检测结果中每个子检测结果分别与其他N-1个子检测结果之间的重叠度;处理器901,还用于从N个子检测结果中,去除平均重叠度小于第二预设阈值的M子检测结果,每个子检测结果的平均重叠度为每个子检测结果对应的N-1个重叠度的平均值,M大于或等于0;处理器801,还用于根据剩余的(N-M)个子检测结果,确定目标检测结果。In one implementation, the
在一种实现方式中,处理器901,还用于计算剩余的(N-M)个子检测结果的平均值,作为目标检测结果。In an implementation manner, the
在一种实现方式中,处理器901,还用于从剩余的(N-M)个子检测结果中,选择准确度最高、或者最大、或者最小的子检测结果,作为目标检测结果。In an implementation manner, the
本申请实施例还提供一种可读存储介质,所述可读存储介质存储有计算机程序,所述计算机程序被处理器执行时,可以用于实现本申请实施例图3或图4所对应实施例中描述的图像检测方法,在此不再赘述。The embodiment of the present application also provides a readable storage medium, and the readable storage medium stores a computer program. When the computer program is executed by a processor, it can be used to implement the implementation corresponding to FIG. 3 or FIG. 4 of the embodiment of the present application. The image detection method described in the example will not be repeated here.
所述计算机可读存储介质可以是前述任一实施例所述的图像处理设备的内部存储单元,例如设备的硬盘或内存。所述计算机可读存储介质也可以是所述图像处理设备的外部存储设备,例如所述设备上配备的插接式硬盘,智能存储卡(Smart Media Card,SMC),安全数字(Secure Digital,SD)卡,闪存卡(Flash Card)等。进一步地,所述计算机可读存储介质还可以既包括所述图像处理设备的内部存储单元也包括外部存储设备。所述计算机可读存储介质用于存储所述计算机程序以及所述图像处理设备所需的其他程序和数据。所述计算机可读存储介质还可以用于暂时地存储已经输出或者将要输出的数据。The computer-readable storage medium may be the internal storage unit of the image processing device described in any of the foregoing embodiments, such as the hard disk or memory of the device. The computer-readable storage medium may also be an external storage device of the image processing device, such as a plug-in hard disk equipped on the device, a smart memory card (Smart Media Card, SMC), and a Secure Digital (SD) ) Card, Flash Card, etc. Further, the computer-readable storage medium may also include both an internal storage unit of the image processing device and an external storage device. The computer-readable storage medium is used to store the computer program and other programs and data required by the image processing device. The computer-readable storage medium can also be used to temporarily store data that has been output or will be output.
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的程序可存储于一可读取存储介质中,所述程序在执行时,可包括如上述各方法的实施例的流程。其中,所述的存储介质可为磁碟、光盘、只读存储记忆体(Read-Only Memory,ROM)或随机存储记忆体(Random Access Memory,RAM)等。A person of ordinary skill in the art can understand that all or part of the processes in the above-mentioned embodiment methods can be implemented by instructing relevant hardware through a computer program. The program can be stored in a readable storage medium, and the program can be stored in a readable storage medium. During execution, it may include the procedures of the above-mentioned method embodiments. Wherein, the storage medium may be a magnetic disk, an optical disc, a read-only memory (Read-Only Memory, ROM), or a random access memory (Random Access Memory, RAM), etc.
以上所揭露的仅为本申请较佳实施例而已,当然不能以此来限定本申请之权利范围,因此依本申请权利要求所作的等同变化,仍属本申请所涵盖的范围。The above-disclosed are only the preferred embodiments of the application, which of course cannot be used to limit the scope of rights of the application. Therefore, equivalent changes made in accordance with the claims of the application still fall within the scope of the application.
Claims (28)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/CN2019/121977WO2021102911A1 (en) | 2019-11-29 | 2019-11-29 | Image detection method, image detection device, and storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/CN2019/121977WO2021102911A1 (en) | 2019-11-29 | 2019-11-29 | Image detection method, image detection device, and storage medium |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021102911A1true WO2021102911A1 (en) | 2021-06-03 |
Family
ID=76129900
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/CN2019/121977CeasedWO2021102911A1 (en) | 2019-11-29 | 2019-11-29 | Image detection method, image detection device, and storage medium |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2021102911A1 (en) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102831386A (en)* | 2011-04-26 | 2012-12-19 | 日立信息通讯工程有限公司 | Object recognition method and recognition apparatus |
| WO2018101247A1 (en)* | 2016-11-29 | 2018-06-07 | マクセル株式会社 | Image recognition imaging apparatus |
| CN109196557A (en)* | 2016-06-08 | 2019-01-11 | 索尼公司 | Image processing apparatus, image processing method and vehicle |
| CN109840883A (en)* | 2019-01-10 | 2019-06-04 | 深圳前海达闼云端智能科技有限公司 | A kind of method, apparatus and calculating equipment of trained object identification neural network |
- 2019
- 2019-11-29WOPCT/CN2019/121977patent/WO2021102911A1/ennot_activeCeased
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102831386A (en)* | 2011-04-26 | 2012-12-19 | 日立信息通讯工程有限公司 | Object recognition method and recognition apparatus |
| CN109196557A (en)* | 2016-06-08 | 2019-01-11 | 索尼公司 | Image processing apparatus, image processing method and vehicle |
| WO2018101247A1 (en)* | 2016-11-29 | 2018-06-07 | マクセル株式会社 | Image recognition imaging apparatus |
| CN109840883A (en)* | 2019-01-10 | 2019-06-04 | 深圳前海达闼云端智能科技有限公司 | A kind of method, apparatus and calculating equipment of trained object identification neural network |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20230110116A1 (en) | Advanced driver assist system, method of calibrating the same, and method of detecting object in the same | |
| US10449900B2 (en) | Video synthesis system, video synthesis device, and video synthesis method | |
| JP6906567B2 (en) | Obstacle detection methods, systems, computer devices, computer storage media | |
| US9225942B2 (en) | Imaging surface modeling for camera modeling and virtual view synthesis | |
| US10484665B2 (en) | Camera parameter set calculation method, recording medium, and camera parameter set calculation apparatus | |
| US11518390B2 (en) | Road surface detection apparatus, image display apparatus using road surface detection apparatus, obstacle detection apparatus using road surface detection apparatus, road surface detection method, image display method using road surface detection method, and obstacle detection method using road surface detection method | |
| US20200158840A1 (en) | Multi-mode multi-sensor calibration | |
| WO2020248910A1 (en) | Target detection method and device | |
| US20140085409A1 (en) | Wide fov camera image calibration and de-warping | |
| JP2011215063A (en) | Camera attitude parameter estimation device | |
| KR20170139548A (en) | Camera extrinsic parameters estimation from image lines | |
| CN106168988B (en) | Method and device for generating masking rules and for masking image information of a camera | |
| US20160180181A1 (en) | Obstacle detecting apparatus and obstacle detecting method | |
| CN113064415A (en) | Trajectory planning method, device, controller and smart car | |
| US20230109473A1 (en) | Vehicle, electronic apparatus, and control method thereof | |
| EP3690799B1 (en) | Vehicle lane marking and other object detection using side fisheye cameras and three-fold de-warping | |
| WO2021110497A1 (en) | Estimating a three-dimensional position of an object | |
| Mariotti et al. | Spherical formulation of geometric motion segmentation constraints in fisheye cameras | |
| JP7363504B2 (en) | Object detection method, detection device and electronic equipment | |
| CN112912895A (en) | Detection method and device and vehicle | |
| CN113661513B (en) | Image processing method, device, image processing system and storage medium | |
| CN114511831B (en) | Detection method and system based on visual drivable area | |
| CN114648639B (en) | Target vehicle detection method, system and device | |
| TWI499999B (en) | The 3D ring car image system based on probability calculation and its obtaining method | |
| KR102071720B1 (en) | Method for matching radar target list and target of vision image |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application | Ref document number:19953987 Country of ref document:EP Kind code of ref document:A1 | |
| NENP | Non-entry into the national phase | Ref country code:DE | |
| 122 | Ep: pct application non-entry in european phase | Ref document number:19953987 Country of ref document:EP Kind code of ref document:A1 |