WO2021033813A1 - Safe driving assistance device and assistance method - Google Patents
Safe driving assistance device and assistance methodDownload PDFInfo
- Publication number
- WO2021033813A1 WO2021033813A1PCT/KR2019/010702KR2019010702WWO2021033813A1WO 2021033813 A1WO2021033813 A1WO 2021033813A1KR 2019010702 WKR2019010702 WKR 2019010702WWO 2021033813 A1WO2021033813 A1WO 2021033813A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- driver
- information
- warning
- state
- driving situation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images





Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K28/00—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions
- B60K28/02—Safety devices for propulsion-unit control, specially adapted for, or arranged in, vehicles, e.g. preventing fuel supply or ignition in the event of potentially dangerous conditions responsive to conditions relating to the driver
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
Definitions
- the present inventionrelates to a safe driving assist device and an assist method.
- auxiliary devicesthere are a device that detects an object in front to prevent a collision while driving, and notifies the driver of a lane departure, a device that detects the departure of the vehicle ahead and informs the driver.
- the prior artsince a warning is generated by detecting a collision risk using a sensor regardless of the driver's condition, the driver becomes insensitive to the warning. As a result, the prior art has a problem in that it does not provide practical assistance to the driver when a dangerous situation occurs.
- the technical problem to be solved by the present inventionis to provide a safe driving assist device and an assist method for generating a warning according to a driver's condition.
- a driving situation detection unitfor generating driving situation information by detecting a driving situation of the vehicle;
- a driver detection unitthat detects a driver and generates driver information;
- a control unitconfigured to determine a dangerous state of a driving situation through the driving situation information and a driver state through the driver information, and generate warning information according to the dangerous state and driver state;
- a warning unitfor warning the driver according to the warning information.
- the driving situation informationmay be at least one of collision warning information, lane departure information, and front vehicle departure information.
- the driver informationmay be at least one of information about a driver's gaze direction, information about a driver's eyes closing, and information about a driver's face direction.
- the risk statemay be any one of a high level risk, a medium level risk, and a low level risk.
- the warning unitmay warn the driver when the warning information is at a dangerous level.
- control unitmay generate the warning information according to the danger state.
- control unitmay generate warning information irrespective of the driver's state when the danger state is a high level of danger.
- a method of assisting a safe driving by a safe driving assistance devicecomprising: generating driving situation information by detecting a driving situation of a vehicle by a driving situation detecting unit; Generating driver information by detecting a driver by a driver detection unit; Determining, by a control unit, a dangerous state of a driving situation through the driving situation information and a driver state through the driver information, and generating warning information according to the dangerous state and driver state; And a warning unit warning the driver according to the warning information.
- a warningis generated only when the driver is in an abnormal driving state or a vehicle is in a dangerous state by detecting a driver's state, thereby helping the driver.
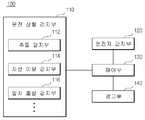
- FIG. 1is a block diagram of a device for assisting safe driving according to an embodiment of the present invention.
- FIG. 2is a diagram for explaining information on a driver's gaze direction, information on a driver's eyes closed, and information on a driver's face direction according to an embodiment of the present invention.
- FIG. 3is a table showing that, as an embodiment of the present invention, a controller identifies a driver's state according to driving situation information.
- FIG. 4is a diagram for explaining a dangerous state according to driving situation information according to an embodiment of the present invention.
- 5is a table for explaining warning information generated according to a dangerous state and a driver's state as an embodiment according to the present invention.
- FIG. 6is a flowchart of a method for assisting a safe driving by a safe driving assist device according to another embodiment of the present invention.
- FIG. 1is a block diagram of a device for assisting safe driving according to an embodiment of the present invention.
- the safe driving assistance device 100includes a driving situation detection unit 110, a driver detection unit 120, a control unit 130, and a warning unit 140.
- the driving situation detection unit 110detects a driving situation required by the driver in the process of driving the vehicle, generates driving situation information, and transmits the driving situation information to the control unit 130 by wire or wirelessly.
- the driving situation detection unit 110detects an object in front to prevent a collision while driving, and the collision detection unit 112 notifies the driver, and the lane departure detection unit 114 notifies the driver of lane departure.
- Itmay include a front vehicle departure detection unit 116 that detects the departure of the vehicle ahead and informs the driver.
- the driving situation informationmay be at least one of collision warning information, lane departure information, and front vehicle departure information.
- the driver detection unit 120detects the driver of the vehicle, generates driver information, and transmits it to the controller 130 by wire or wirelessly.
- the driver informationrefers to information that serves as a criterion for determining whether the driver is driving the vehicle normally, such as information on the driver's gaze direction, information on the driver's eyes closed, and information on the driver's face.
- the control unit 130determines the dangerous state and the driver state of the driving situation through the driving situation information transmitted from the driving situation detection unit 110 and the driver information transmitted from the driver detection unit 120, and determines the dangerous state and the driver state. Accordingly, warning information is generated and transmitted to the warning unit 140.
- the warning unit 140warns the driver according to the warning information transmitted through the control unit 130.
- the warningmay be at least one of a warning sound, a warning light, and a warning message, and any other means of warning the driver may be used.
- the safe driving assistance device 100may be installed in a vehicle in which the driving situation detection unit 110, the driver detection unit 120, the control unit 130, and the warning unit 140 are configured as one device or different devices.
- the driving situation detection unit 110may utilize a known black box, and the driver detection unit 120, the control unit 130, and the warning unit 140 may be configured as separate driver status detection devices. .
- FIG. 2is a diagram for explaining information about a driver's gaze direction, information about a driver's eyes closed, and information about a driver's face direction among driver information according to an embodiment of the present invention.
- FIG. 2(a)shows an area in the direction of the driver's gaze.
- the driver detection unit 120when the driver's gaze direction region is divided into a square 210, a side mirror 220, a guitar 230, and a rearview mirror 240, the driver detection unit 120 The driver's gaze direction information can be generated by detecting which area the driver's gaze direction is in.
- the division of the driver's gaze direction regionmay vary according to implementation examples, and the driver's gaze direction region may be stored in advance in the driver detection unit 120 or may be defined by the driver.
- FIG. 2(b)shows the degree of the driver's eyes closed.
- the driver's eyesare closed by dividing and setting the driver's eyes closed 250 and eyes closed 260, so that the driver's eyes are closed.
- the degree of the driver's eyes closedmay vary according to implementation examples, and the degree of the driver's eyes closed may be stored in the driver detection unit 120 or may be defined by the driver.
- FIG. 2(c)shows the driver's face direction.
- the driver detection unit 120may detect the driver's face direction and generate the driver's face direction information.
- the driver's face direction informationcan be generated by detecting a state in which the driver's face is in the front direction 270 and the driver's face direction is in the side direction 280, and when the driver's face direction is in a different direction It will be apparent to a person skilled in the art that it can also be created.
- FIG. 3is a table showing that, as an embodiment of the present invention, a controller identifies a driver's state according to driving situation information.
- a controlleridentifies a driver's state according to driving situation information.
- the driver's face directionis front, side, or other, when the degree of eye-close is open or closed, and the gaze direction is front, side mirror, rearview mirror/etc. Taking into account the driver's condition.
- FIG. 3(a)is a diagram showing the identification of a driver's state when the driving situation information is collision warning information or departure information of a vehicle ahead.
- the controller 130determines the driver's state as a normal driving state when the driver's face direction is front, the driver's eyes are open, and the driver's gaze direction is forward. To identify it as an abnormal driving state.
- FIG. 3(b)is a diagram illustrating the identification of a driver's state when the driving situation information is lane departure information.
- the controller 130determines the driver's state as a normal driving state when the driver's face is in front, the driver's eyes are open, and the driver's gaze direction is a front or side mirror. Further, the controller 130 determines the driver's state as a normal driving state when the driver's face direction is the side, the driver's eyes are open, and the driver's gaze direction is the side mirror. In other cases, the controller 130 determines the driver's state as an abnormal driving state.
- FIG. 4is a diagram for explaining a dangerous state according to driving situation information according to an embodiment of the present invention.
- FIG. 4(a)shows a dangerous state of collision warning information.
- the collision detection unit 114generates collision warning information based on the distance and speed between the vehicle 410 and the counterpart vehicle 420 driven by the driver, and transmits the collision warning information to the controller 130. send.
- the control unit 130is based on the collision warning information, depending on the distance between the vehicle 410 and the counterpart vehicle 420 or the predicted collision time, the high level risk 460, the intermediate level risk 450, the low level risk 440 ) To identify the danger status.
- FIG. 4(b)shows a dangerous state of lane departure information.
- the lane departure detection unit 112generates lane departure information based on the detected departure distance of the lane 430 of the vehicle 410 and transmits it to the control unit 130. Based on the lane departure information, the control unit 130 classifies the dangerous state into a high level risk 460, a medium level risk 450, and a low level risk 440 according to the departure distance of the lane 430 of the vehicle 410. To grasp.
- FIG. 4(c)shows a dangerous state of the departure information of the preceding vehicle.
- the front vehicle departure detection unit 1160generates the front vehicle departure information based on the detected distance to the vehicle ahead 420 and the departure time of the vehicle ahead 420 and transmits it to the controller 130.
- the control unit 130divides the risk into a high level risk 460, a medium level risk 450, and a low level risk 440 according to the distance from the car ahead 420 or the departure time of the car ahead 420 based on the departure information of the car ahead. Know the condition.
- 5is a table for explaining warning information generated according to a dangerous state and a driver's state as an embodiment according to the present invention.
- FIG. 5(a)shows warning information generated according to the danger state of the collision warning information and the danger state of the front vehicle departure information and the driver state.
- the controller 130when the driver's state is normal, the controller 130 does not generate warning information for low-level risk and medium-level risk, and generates warning information only in case of high-level risk.
- the controller 130When the driver's state is abnormal driving, the controller 130 generates different warning information according to the danger state. For example, in the case of a high-level risk, the control unit 130 displays the risk level-strong warning information, in the case of a medium level risk, the risk level-medium warning information, and in the case of a low level risk, the risk level-weak warning information Generate.
- FIG. 5(b)shows warning information generated according to a dangerous state of lane departure information and a driver's state.
- the controller 130does not generate warning information because it recognizes that a normal lane 430 has changed.
- the controller 130When the driver's state is abnormal, the controller 130 generates different warning information according to the danger state.
- the control unit 130transmits the warning information to the warning unit 140 only when it corresponds to the warning information.
- the warning unit 140may change the warning method according to the warning information transmitted through the control unit 130. For example, if the warning information is Danger Level-Weak Warning, only one of warning sound, warning light, and warning message is warned, Danger Level-Medium warning warning only two of warning sound, warning light, and warning message, Danger Level-Strong Warning The warning sound, warning light, and warning message can be used, or the sound and brightness of the warning sound and warning light can be changed.
- the warning informationis Danger Level-Weak Warning
- Danger Level-Medium warning warningonly two of warning sound, warning light, and warning message
- Danger Level-Strong WarningThe warning sound, warning light, and warning message can be used, or the sound and brightness of the warning sound and warning light can be changed.
- the risk stateis classified into a high level risk, a medium level risk, and a low level risk.
- FIG. 6is a flowchart of a method for assisting a safe driving by a safe driving assist device according to another embodiment of the present invention.
- step S610the driving situation detection unit 110 detects the driving situation of the vehicle, generates driving situation information, and transmits the driving situation information to the control unit 130.
- step S620the driver detection unit 120 detects the driver, generates driver information, and transmits the driver information to the controller 130.
- step S630the control unit 130 identifies the dangerous state and the driver state of the driving situation through the driving situation information and driver information transmitted from the driving situation detection unit 110 and the driver detection unit 120, and Generates warning information according to.
- step S640the control unit 130 determines whether it is a risk level according to the warning information, and if it is a risk level, proceeds to step S650, and if not, proceeds to steps S610 to S630.
- step S650the control unit 130 transmits the warning information to the warning unit 140, and the warning unit 140 warns the driver according to the warning information received from the control unit 130.
- driving situation detection unit 120driver detection unit
- control unit 140warning unit
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Human Computer Interaction (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
Translated fromKorean본 발명은 안전 운전 보조 장치 및 보조 방법에 관한 것이다.The present invention relates to a safe driving assist device and an assist method.
최근, 센서기술 및 통신기술이 발달함에 따라 이를 이용한 안전 운전을 위한 각종 안전 보조 장치가 차량에 적용되고 있다. 예를 들어 보조 장치로는 주행 중 추돌을 방지하도록 전방의 물체를 감지하여 운전자에게 알려주는 장치, 차선 이탈 여부를 운전자에게 알려주는 장치, 앞차 출발을 감지해 운전자에게 알려주는 장치 등이 있다.Recently, with the development of sensor technology and communication technology, various safety assist devices for safe driving using the same have been applied to vehicles. For example, as auxiliary devices, there are a device that detects an object in front to prevent a collision while driving, and notifies the driver of a lane departure, a device that detects the departure of the vehicle ahead and informs the driver.
이와 관련된 종래기술로는 대한민국 등록특허공보 제0170857호 (1998.10.16. 등록)가 있다.As a related art, there is Korean Patent Publication No. 0170857 (registered on October 16, 1998).
종래기술은 운전자 상태와 상관없이 센서를 이용해 충돌위험을 감지하여 경고를 발생시키기 때문에, 운전자가 경고에 무신경해지게 된다. 그 결과 종래기술은 정작 위험한 상황이 발생하였을 때 운전자에게 실질적인 도움이 되지 못하는 문제점이 있다.In the prior art, since a warning is generated by detecting a collision risk using a sensor regardless of the driver's condition, the driver becomes insensitive to the warning. As a result, the prior art has a problem in that it does not provide practical assistance to the driver when a dangerous situation occurs.
본 발명이 해결하고자 하는 기술적 과제는, 운전자 상태에 따라 경고를 발생시키는 안전 운전 보조 장치 및 보조 방법을 제공하는 것이다.The technical problem to be solved by the present invention is to provide a safe driving assist device and an assist method for generating a warning according to a driver's condition.
상기와 같은 기술적 과제를 해결하기 위해, 차량의 운전 상황을 감지하여 운전 상황 정보를 생성하는 운전 상황 감지부; 운전자를 감지하여 운전자 정보를 생성하는 운전자 감지부; 상기 운전 상황 정보를 통해 운전 상황의 위험 상태와 상기 운전자 정보를 통해 운전자 상태를 파악하고 상기 위험 상태와 운전자 상태에 따라 경고 정보를 생성하는 제어부; 및 상기 경고 정보에 따라 상기 운전자에게 경고하는 경고부;를 포함하는 안전 운전 보조 장치를 제공한다.In order to solve the technical problem as described above, a driving situation detection unit for generating driving situation information by detecting a driving situation of the vehicle; A driver detection unit that detects a driver and generates driver information; A control unit configured to determine a dangerous state of a driving situation through the driving situation information and a driver state through the driver information, and generate warning information according to the dangerous state and driver state; And a warning unit for warning the driver according to the warning information.
여기서, 상기 운전 상황 정보는 추돌 경고 정보, 차선 이탈 정보 및 앞차 출발 정보 중 적어도 어느 하나일 수 있다.Here, the driving situation information may be at least one of collision warning information, lane departure information, and front vehicle departure information.
여기서, 상기 운전자 정보는 운전자의 시선 방향 정보, 운전자의 눈 감김 정보, 운전자의 얼굴 방향 정보 중 적어도 어느 하나일 수 있다.Here, the driver information may be at least one of information about a driver's gaze direction, information about a driver's eyes closing, and information about a driver's face direction.
여기서, 상기 위험 상태는 높은 수준 위험, 중간 수준 위험, 낮은 수준 위험 중 어느 하나일 수 있다.Here, the risk state may be any one of a high level risk, a medium level risk, and a low level risk.
여기서, 상기 경고부는 상기 경고 정보가 위험 수준인 경우에 상기 운전자에게 경고할 수 있다.Here, the warning unit may warn the driver when the warning information is at a dangerous level.
여기서, 상기 제어부는 상기 운전자 상태가 비정상적인 운전 상태인 경우에 상기 위험 상태에 따라 상기 경고 정보를 생성할 수 있다.Here, when the driver's state is an abnormal driving state, the control unit may generate the warning information according to the danger state.
여기서, 상기 제어부는 위험 상태가 높은 수준 위험인 경우에 상기 운전자 상태와 무관하게 경고 정보를 생성할 수 있다.Here, the control unit may generate warning information irrespective of the driver's state when the danger state is a high level of danger.
본 발명의 바람직한 다른 측면에 따르면, 안전 운전 보조 장치가 안전 운전을 보조하는 방법에 있어서, 운전 상황 감지부가 차량의 운전 상황을 감지하여 운전 상황 정보를 생성하는 단계; 운전자 감지부가 운전자를 감지하여 운전자 정보를 생성하는 단계; 제어부가 상기 운전 상황 정보를 통해 운전 상황의 위험 상태와 상기 운전자 정보를 통해 운전자 상태를 파악하고 상기 위험 상태와 운전자 상태에 따라 경고 정보를 생성하는 단계; 및 경고부가 상기 경고 정보에 따라 상기 운전자에게 경고하는 단계;를 포함하는 안전 운전 보조 방법을 제공한다.According to another preferred aspect of the present invention, there is provided a method of assisting a safe driving by a safe driving assistance device, the method comprising: generating driving situation information by detecting a driving situation of a vehicle by a driving situation detecting unit; Generating driver information by detecting a driver by a driver detection unit; Determining, by a control unit, a dangerous state of a driving situation through the driving situation information and a driver state through the driver information, and generating warning information according to the dangerous state and driver state; And a warning unit warning the driver according to the warning information.
본 발명은 운전자 상태를 감지해 운전자가 비정상 운전 상태이거나 또는 차량이 위험한 상태인 경우에만 경고를 발생시켜 운전자에게 도움을 줄 수 있는 효과가 있다.According to the present invention, a warning is generated only when the driver is in an abnormal driving state or a vehicle is in a dangerous state by detecting a driver's state, thereby helping the driver.
도 1은 본 발명의 일 실시예에 따른 안전 운전 보조 장치의 구성도이다.1 is a block diagram of a device for assisting safe driving according to an embodiment of the present invention.
도 2는 본 발명에 따른 일 실시예로서, 운전자의 시선 방향 정보, 운전자의 눈 감김 정보, 운전자의 얼굴 방향 정보를 설명하기 위한 도면이다.FIG. 2 is a diagram for explaining information on a driver's gaze direction, information on a driver's eyes closed, and information on a driver's face direction according to an embodiment of the present invention.
도 3은 본 발명에 따른 일 실시예로서, 제어부가 운전 상황 정보에 따른 운전자 상태를 파악하는 것을 나타내는 표이다.FIG. 3 is a table showing that, as an embodiment of the present invention, a controller identifies a driver's state according to driving situation information.
도 4는 본 발명에 따른 일 실시예로서, 운전 상황 정보에 따른 위험 상태를 설명하기 위한 도면이다.4 is a diagram for explaining a dangerous state according to driving situation information according to an embodiment of the present invention.
도 5는 본 발명에 따른 일 실시예로서, 위험 상태와 운전자 상태에 따라 생성되는 경고 정보를 설명하기 위한 표이다.5 is a table for explaining warning information generated according to a dangerous state and a driver's state as an embodiment according to the present invention.
도 6은 본 발명에 따른 다른 실시예로서, 안전 운전 보조 장치가 안전 운전을 보조하는 방법의 순서도이다.6 is a flowchart of a method for assisting a safe driving by a safe driving assist device according to another embodiment of the present invention.
본 발명은 다양한 변경을 가할 수 있고 여러 가지 실시예를 가질수 있는바, 특정 실시예들을 도면에 예시하고 상세한 설명에 상세하게 설명하고자 한다. 그러나 이는 본 발명을 특정한 실시 형태에 대해 한정하려는 것이 아니며, 본 발명의 사상 및 기술범위에 포함되는 모든 변경, 균등물 내지 대체물을 포함하는 것으로 이해되어야 한다.Since the present invention can make various changes and have various embodiments, specific embodiments will be illustrated in the drawings and described in detail in the detailed description. However, this is not intended to limit the present invention to a specific embodiment, it should be understood to include all changes, equivalents, or substitutes included in the spirit and scope of the present invention.
제1, 제2 등과 같이 서수를 포함하는 용어는 다양한 구성요소들을 설명하는데 사용될 수 있지만, 해당 구성요소들은 이와 같은 용어들에 의해 한정되지는 않는다. 이 용어들은 하나의 구성요소들을 다른 구성요소로부터 구별하는 목적으로만 사용된다.Terms including ordinal numbers, such as first and second, may be used to describe various elements, but the corresponding elements are not limited by these terms. These terms are only used for the purpose of distinguishing one component from another.
어떤 구성요소가 다른 구성요소에 '연결되어' 있다거나, 또는 '접속되어' 있다고 언급된 때에는, 그 다른 구성요소에 직접적으로 연결되어 있거나 또는 접속되어 있을 수도 있지만, 중간에 다른 구성요소가 존재할 수도 있다고 이해되어야 할 것이다. 반면에, 어떤 구성요소가 다른 구성요소에 '직접 연결되어' 있다거나, '직접 접속되어' 있다고 언급된 때에는, 중간에 다른 구성요소가 존재하지 않는 것으로 이해되어야 할 것이다.When an element is referred to as being'connected' or'connected' to another element, it may be directly connected to or connected to the other element, but other elements may exist in the middle. It should be understood that there is. On the other hand, when a component is referred to as being'directly connected' or'directly connected' to another component, it should be understood that there is no other component in the middle.
본 출원에서 사용한 용어는 단지 특정한 실시예를 설명하기 위해 사용된 것으로, 본 발명을 한정하려는 의도가 아니다. 단수의 표현은 문맥상 명백하게 다르게 뜻하지 않는 한, 복수의 표현을 포함한다. 본 출원에서, '포함한다' 또는 '가지다' 등의 용어는 명세서상에 기재된 특징, 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것이 존재함을 지정하려는 것이지, 하나 또는 그 이상의 다른 특징들이나 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것들의 존재 또는 부가 가능성을 미리 배제하지 않는 것으로 이해되어야 한다.The terms used in the present application are only used to describe specific embodiments, and are not intended to limit the present invention. Singular expressions include plural expressions unless the context clearly indicates otherwise. In the present application, terms such as'include' or'have' are intended to designate the presence of features, numbers, steps, actions, components, parts, or a combination thereof described in the specification, but one or more other features It is to be understood that the presence or addition of elements or numbers, steps, actions, components, parts, or combinations thereof, does not preclude in advance.
도 1은 본 발명의 일 실시예에 따른 안전 운전 보조 장치의 구성도이다.1 is a block diagram of a device for assisting safe driving according to an embodiment of the present invention.
도 1을 참조하면, 안전 운전 보조 장치(100)는 운전 상황 감지부(110), 운전자 감지부(120), 제어부(130) 및 경고부(140)를 포함한다.Referring to FIG. 1, the safe
운전 상황 감지부(110)는 차량을 운전하는 과정에서 운전자에게 필요한 운전 상황을 감지하여 운전 상황 정보를 생성하고, 유선 또는 무선으로 제어부(130)에 전송한다. 예를 들어, 운전 상황 감지부(110)는 주행 중 추돌을 방지하도록 전방의 물체를 감지하여 운전자에게 알려주는 추돌 감지부(112), 차선 이탈 여부를 운전자에게 알려 주는 차선 이탈 감지부(114), 앞차 출발을 감지해 운전자에게 알려주는 앞차 출발 감지부(116) 등을 포함할 수 있다. 여기서, 운전 상황 정보는 추돌 경고 정보, 차선 이탈 정보 및 앞차 출발 정보 중 적어도 어느 하나일 수 있다.The driving
운전자 감지부(120)는 차량의 운전자를 감지하여 운전자 정보를 생성하고, 유선 또는 무선으로 제어부(130)에 전송한다. 예를 들어, 운전자 정보는 운전자의 시선 방향 정보, 운전자의 눈 감김 정보, 운전자의 얼굴 방향 정보 등과 같이 운전자가 차량의 정상적인 운전을 하고 있는지 여부를 판단하는 기준이 되는 정보를 말한다.The
제어부(130)는 운전 상황 감지부(110)에서 전송 받은 운전 상황 정보와 운전가 감지부(120)에서 전송 받은 운전자 정보를 통해 운전 상황의 위험 상태와 운전자 상태를 파악하고, 위험 상태와 운전자 상태에 따라 경고 정보를 생성해 경고부(140)에 전송한다.The
경고부(140)는 제어부(130)를 통해 전송 받은 경고 정보에 따라 운전자에게 경고한다. 여기서, 경고는 경고음, 경고등, 경고 메시지 중 적어도 어느 하나일 수 있으며, 이외에도 운전자에게 경고할 수 있는 수단이라면 사용될 수 있다.The
안전 운전 보조 장치(100)는 운전 상황 감지부(110), 운전자 감지부(120), 제어부(130) 및 경고부(140)가 하나의 기기 또는 서로 다른 기기로 구성되어 차량에 설치될 수 있다. 예를 들어, 운전 상황 감지부(110)는 공지된 블랙박스를 활용할 수 있고, 운전자 감지부(120), 제어부(130) 및 경고부(140)는 별도의 운전자 상태 감지 장치로 구성될 수 있다.The safe
도 2는 본 발명에 따른 일 실시예로서, 운전자 정보 중 운전자의 시선 방향 정보, 운전자의 눈 감김 정보, 운전자의 얼굴 방향 정보를 설명하기 위한 도면이다.FIG. 2 is a diagram for explaining information about a driver's gaze direction, information about a driver's eyes closed, and information about a driver's face direction among driver information according to an embodiment of the present invention.
구체적으로 도 2에서 도 2(a)는 차량의 운전자의 시선 방향 영역을 나타낸 것이다. 도 2(a)를 참조하면, 운전자의 시선 방향 영역을 정방(210), 사이드 미러(220), 기타(230) 및 룸미러(240)로 구분하여 설정한 경우, 운전자 감지부(120)는 운전자의 시선 방향이 어느 영역에 있는지 감지해 운전자의 시선 방향 정보를 생성할 수 있다. 운전자의 시선 방향 영역의 구분은 구현 예에 따라 달라질 수 있으며, 운전자의 시선 방향 영역은 운전자 감지부(120)에 미리 저장될 수도 있고, 운전자가 정의할 수도 있다.Specifically, in FIG. 2, FIG. 2(a) shows an area in the direction of the driver's gaze. Referring to FIG. 2(a), when the driver's gaze direction region is divided into a
도 2에서 도 2(b)는 운전자의 눈 감김 정도를 나타낸 것이다. 도 2(b)를 참조하면, 운전자의 눈 감김 정도를 눈을 뜨고 있는 상태(250) 및 눈을 감고 있는 상태(260)로 구분하여 설정함으로써, 운전자 감지부(120)가 운전자의 눈 감김 정도를 감지해 운전자의 눈 감김 정보를 생성할 수 있다. 운전자의 눈 감김 정도는 구현 예에 따라 달라질 수 있으며, 운전자의 눈 감김 정도는 운전자 감지부(120)에 저장될 수도 있고, 운전자가 정의할 수도 있다.In FIG. 2, FIG. 2(b) shows the degree of the driver's eyes closed. Referring to FIG. 2(b), the driver's eyes are closed by dividing and setting the driver's eyes closed 250 and eyes closed 260, so that the driver's eyes are closed. By detecting the driver's eyes closed information can be generated. The degree of the driver's eyes closed may vary according to implementation examples, and the degree of the driver's eyes closed may be stored in the
도 2에서 도 2(c)는 운전자의 얼굴 방향을 나타낸 것이다. 도 2(c)를 참조하면, 운전자 감지부(120)가 운전자의 얼굴 방향을 감지해 운전자의 얼굴 방향 정보를 생성할 수 있다. 예를 들어, 운전자의 얼굴 방향이 정면인 상태(270), 운전자의 얼굴 방향이 측면인 상태(280)를 감지해 운전자의 얼굴 방향 정보를 생성할 수 있으며, 운전자의 얼굴 방향이 다른 방향인 경우도 생성할 수 있는 것은 통상의 기술자에게 자명하다고 할 것이다.In FIG. 2, FIG. 2(c) shows the driver's face direction. Referring to FIG. 2C, the
도 3은 본 발명에 따른 일 실시예로서, 제어부가 운전 상황 정보에 따른 운전자 상태를 파악하는 것을 나타내는 표이다. 제어부(130)는 운전자의 얼굴 방향이 정면, 측면, 기타인 경우, 눈 감김 정도가 눈 뜨고 있는 상태, 눈 감고 있는 상태인 경우, 시선 방향이 정방, 사이드 미러, 룸미러/기타인 경우에 이를 고려하여 운전자 상태를 파악하고 있다.FIG. 3 is a table showing that, as an embodiment of the present invention, a controller identifies a driver's state according to driving situation information. When the driver's face direction is front, side, or other, when the degree of eye-close is open or closed, and the gaze direction is front, side mirror, rearview mirror/etc. Taking into account the driver's condition.
구체적으로 도 3에서 도 3(a)는 운전 상황 정보가 추돌 경고 정보 또는 앞차 출발 정보일 때 운전자 상태를 파악하는 것을 나타내는 도면이다. 도 3(a)를 참조하면, 제어부(130)는 운전자 상태를 운전자의 얼굴 방향이 정면이고 운전자가 눈을 뜨고 있으며 운전자의 시선 방향이 정방인 경우에 정상 운전 상태로 파악하고, 그 이외의 경우에 비정상 운전 상태로 파악한다.Specifically, in FIG. 3, FIG. 3(a) is a diagram showing the identification of a driver's state when the driving situation information is collision warning information or departure information of a vehicle ahead. Referring to FIG. 3(a), the
도 3에서 도 3(b)는 운전 상황 정보가 차선 이탈 정보일 때 운전자 상태를 파악하는 것을 나타내는 도면이다. 도 3(b)를 참조하면, 제어부(130)는 운전자 상태를 운전자의 얼굴 방향이 정면이고 운전자가 눈을 뜨고 있으며 운전자의 시선 방향이 정방 또는 사이드 미러인 경우에 정상 운전 상태로 파악한다. 또한, 제어부(130)는 운전자 상태를 운전자의 얼굴 방향이 측면이고 운전자가 눈을 뜨고 있으며 운전자의 시선 방향이 사이드 미러인 경우에 정상 운전 상태로 파악한다. 제어부(130)는 그 이외의 경우에 운전자 상태를 비정상 운전 상태로 파악한다.In FIG. 3, FIG. 3(b) is a diagram illustrating the identification of a driver's state when the driving situation information is lane departure information. Referring to FIG. 3B, the
도 4는 본 발명에 따른 일 실시예로서, 운전 상황 정보에 따른 위험 상태를 설명하기 위한 도면이다.4 is a diagram for explaining a dangerous state according to driving situation information according to an embodiment of the present invention.
구체적으로, 도 4에서 도 4(a)는 추돌 경고 정보의 위험 상태를 나타낸 것이다. 도 4(a)를 참조하면, 추돌 감지부(114)가 운전자가 운전하는 차량(410)과 상대 차량(420)과의 거리와 속도 등을 바탕으로 추돌 경고 정보를 생성해 제어부(130)로 전송한다. 제어부(130)는 추돌 경고 정보를 바탕으로 차량(410)과 상대 차량(420)과의 거리 또는 충돌 발생 예상시간에 따라 높은 수준 위험(460), 중간 수준 위험(450), 낮은 수준 위험(440)으로 구분해 위험 상태를 파악한다.Specifically, in FIG. 4, FIG. 4(a) shows a dangerous state of collision warning information. Referring to FIG. 4(a), the
도 4에서 도 4(b)는 차선 이탈 정보의 위험 상태를 나타낸 것이다. 도 4(b)를 참조하면, 차선 이탈 감지부(112)는 감지된 차량(410)의 차선(430) 이탈 거리를 바탕으로 차선 이탈 정보를 생성해 제어부(130)로 전송한다. 제어부(130)가 차선 이탈 정보를 바탕으로 차량(410)의 차선(430) 이탈 거리에 따라 높은 수준 위험(460), 중간 수준 위험(450), 낮은 수준 위험(440)으로 구분해 위험 상태를 파악한다.In FIG. 4, FIG. 4(b) shows a dangerous state of lane departure information. Referring to FIG. 4B, the lane
도 4에서 도 4(c)는 앞차 출발 정보의 위험 상태를 나타낸 것이다. 도 4(c)를 참조하면, 앞차 출발 감지부(1160)는 감지된 앞차(420)와의 거리와 앞차(420) 출발 시간을 바탕으로 앞차 출발 정보를 생성해 제어부(130)로 전송한다. 제어부(130)가 앞차 출발 정보를 바탕으로 앞차(420)와의 거리 또는 앞차(420) 출발 시간에 따라 높은 수준 위험(460), 중간 수준 위험(450), 낮은 수준 위험(440)으로 구분해 위험 상태를 파악한다.In FIG. 4, FIG. 4(c) shows a dangerous state of the departure information of the preceding vehicle. Referring to FIG. 4C, the front vehicle departure detection unit 1160 generates the front vehicle departure information based on the detected distance to the vehicle ahead 420 and the departure time of the vehicle ahead 420 and transmits it to the
도 5는 본 발명에 따른 일 실시예로서, 위험 상태와 운전자 상태에 따라 생성되는 경고 정보를 설명하기 위한 표이다.5 is a table for explaining warning information generated according to a dangerous state and a driver's state as an embodiment according to the present invention.
도 5에서 도 5(a)는 추돌 경고 정보의 위험 상태 및 앞차 출발 정보의 위험 상태와 운전자 상태에 따라 생성되는 경고 정보를 나타낸 것이다. 도 5(a)를 참조하면, 제어부(130)는 운전자 상태가 정상 운전일 경우 낮은 수준 위험 및 중간 수준 위험에는 경고 정보를 생성하지 않고, 높은 수준 위험일 경우에만 경고 정보를 생성한다.In FIG. 5, FIG. 5(a) shows warning information generated according to the danger state of the collision warning information and the danger state of the front vehicle departure information and the driver state. Referring to FIG. 5A, when the driver's state is normal, the
제어부(130)는 운전자 상태가 비정상 운전일 경우에는 위험 상태에 따라 다른 경고 정보를 생성한다. 예를 들어, 제어부(130)는 높은 수준 위험인 경우에는 위험 수준 - 강한 경고 정보를, 중간 수준 위험인 경우에는 위험 수준 - 중간 경고 정보를, 낮은 수준 위험인 경우에는 위험 수준 - 약한 경고 정보를 생성한다.When the driver's state is abnormal driving, the
도 5에서 도 5(b)는 차선 이탈 정보의 위험 상태와 운전자 상태에 따라 생성되는 경고 정보를 나타낸 것이다. 도 5(b)를 참조하면, 제어부(130)는 운전자 상태가 정상 운전일 경우 제어부(130)는 정상적인 차선(430) 변경으로 파악해 경고 정보를 생성하지 않는다.In FIG. 5, FIG. 5(b) shows warning information generated according to a dangerous state of lane departure information and a driver's state. Referring to FIG. 5B, when the driver's state is a normal driving, the
제어부(130)는 운전자 상태가 비정상 운전일 경우 제어부(130)는 위험 상태에 따라 다른 경고 정보를 생성한다.When the driver's state is abnormal, the
제어부(130)는 경고 정보에 해당하는 경우에만 경고부(140)에 경고 정보를 전송한다.The
한편, 경고부(140)는 제어부(130)를 통해 전송 받은 경고 정보에 따라 경고 방법을 달리 할 수 있다. 예를 들어, 경고 정보가 위험 수준 - 약한 경고일 경우 경고음, 경고등, 경고 메시지 중 하나만으로 경고하고, 위험 수준 - 중간 경고에는 경고음, 경고등, 경고 메시지 중 두 개만으로 경고하고, 위험 수준 - 강한 경고에는 경고음, 경고등, 경고 메시지 모두로 경고하거나, 경고음 및 경고등의 소리와 밝기를 달리할 수 있다.Meanwhile, the
한편, 도 4 및 도 5에서는 위험 상태를 높은 수준 위험, 중간 수준 위험, 낮은 수준 위험으로 구분되는 것으로 설명하였으나 높은 수준과 낮은 수준으로 위험으로 구분할 수 있음은 통상의 기술자에게 자명하다고 할 것이다.Meanwhile, in FIGS. 4 and 5, it has been described that the risk state is classified into a high level risk, a medium level risk, and a low level risk.
도 6은 본 발명에 따른 다른 실시예로서, 안전 운전 보조 장치가 안전 운전을 보조하는 방법의 순서도이다.6 is a flowchart of a method for assisting a safe driving by a safe driving assist device according to another embodiment of the present invention.
도 6을 참조하면, S610단계에서 운전 상황 감지부(110)가 차량의 운전 상황을 감지하여 운전 상황 정보를 생성해 제어부(130)로 전송한다.Referring to FIG. 6, in step S610, the driving
S620단계에서 운전자 감지부(120)가 운전자를 감지하여 운전자 정보를 생성해 제어부(130)로 전송한다.In step S620, the
S630단계에서 제어부(130)가 운전 상황 감지부(110)와 운전자 감지부(120)로부터 전송 받은 운전 상황 정보와 운전자 정보를 통해 운전 상황의 위험 상태와 운전자 상태를 파악하고, 위험 상태와 운전자 상태에 따라 경고 정보를 생성한다.In step S630, the
S640단계에서 제어부(130)가 경고 정보에 따라 위험 수준인지 판단하여 위험 수준인 경우 S650단계로 진행하고, 위험 수준이 아닌 경우 S610 내지 S630단계를 진행한다.In step S640, the
S650단계에서 제어부(130)는 경고 정보를 경고부(140)에 전송하고 경고부(140)가 제어부(130)로부터 전송 받은 경고 정보에 따라 운전자에게 경고한다.In step S650, the
이상에서 본 발명에 따른 실시예들이 설명되었으나, 이는 예시적인 것에 불과하며, 본 발명의 속하는 기술분야에서 통상의 지식을 가진 자라면 이로부터 다양한 변형 및 균등한 범위의 실시예가 가능하다는 점을 이해할 것이다. 따라서 본 발명의 진정한 기술적 보호범위는 다음의 청구범위에 의해서 정해져야할 것이다.Although the embodiments according to the present invention have been described above, these are merely exemplary, and those of ordinary skill in the art will appreciate that various modifications and equivalent range of embodiments are possible therefrom. . Therefore, the true technical protection scope of the present invention should be determined by the following claims.
[부호의 설명][Explanation of code]
110 : 운전 상황 감지부120 : 운전자 감지부110: driving situation detection unit 120: driver detection unit
130 : 제어부140 : 경고부130: control unit 140: warning unit
Claims (8)
Translated fromKoreanPriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/KR2019/010702WO2021033813A1 (en) | 2019-08-22 | 2019-08-22 | Safe driving assistance device and assistance method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/KR2019/010702WO2021033813A1 (en) | 2019-08-22 | 2019-08-22 | Safe driving assistance device and assistance method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021033813A1true WO2021033813A1 (en) | 2021-02-25 |
Family
ID=74659666
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/KR2019/010702CeasedWO2021033813A1 (en) | 2019-08-22 | 2019-08-22 | Safe driving assistance device and assistance method |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2021033813A1 (en) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120212353A1 (en)* | 2011-02-18 | 2012-08-23 | Honda Motor Co., Ltd. | System and Method for Responding to Driver Behavior |
| KR20140076910A (en)* | 2012-12-13 | 2014-06-23 | 삼성전기주식회사 | System and method for monitoring driver condition and driving status for motor vehicle |
| KR101563639B1 (en)* | 2014-06-20 | 2015-10-28 | 주식회사 성우모바일 | Alarming device for vehicle and method for warning driver of vehicles |
| KR20160133179A (en)* | 2015-05-12 | 2016-11-22 | 자동차부품연구원 | Method and Apparatus For Dangerous Driving Conditions Detection Based On Integrated Human Vehicle Interface |
| US20170262713A1 (en)* | 2016-02-03 | 2017-09-14 | Beijing Smarter Eye Technology Co. Ltd. | Method and Device of Lane Departure Warning and Automobile Driving Assistance System |
- 2019
- 2019-08-22WOPCT/KR2019/010702patent/WO2021033813A1/ennot_activeCeased
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20120212353A1 (en)* | 2011-02-18 | 2012-08-23 | Honda Motor Co., Ltd. | System and Method for Responding to Driver Behavior |
| KR20140076910A (en)* | 2012-12-13 | 2014-06-23 | 삼성전기주식회사 | System and method for monitoring driver condition and driving status for motor vehicle |
| KR101563639B1 (en)* | 2014-06-20 | 2015-10-28 | 주식회사 성우모바일 | Alarming device for vehicle and method for warning driver of vehicles |
| KR20160133179A (en)* | 2015-05-12 | 2016-11-22 | 자동차부품연구원 | Method and Apparatus For Dangerous Driving Conditions Detection Based On Integrated Human Vehicle Interface |
| US20170262713A1 (en)* | 2016-02-03 | 2017-09-14 | Beijing Smarter Eye Technology Co. Ltd. | Method and Device of Lane Departure Warning and Automobile Driving Assistance System |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2013032267A1 (en) | Street lamp for providing safe driving information, and system for providing safe driving information using street lamp | |
| WO2014077441A1 (en) | Apparatus and method for detecting nearby vehicles though inter-vehicle communication | |
| WO2014077522A1 (en) | Device and method for relay fusion detection for battery system | |
| WO2012169687A1 (en) | Device and method for detecting error in dual controller system | |
| WO2015053434A1 (en) | Device for performing a camera-based estimation of load on a vehicle and method of estimating load on a vehicle | |
| WO2018088758A1 (en) | Uninterrupted flow expressway dangerous situation control device for responding to unexpected situation in dangerous section including traffic accident black spot on expressway, and method therefor | |
| WO2014084593A1 (en) | Apparatus and method for supporting safe driving | |
| WO2014077442A1 (en) | Apparatus for determining lane position through inter-vehicle communication | |
| WO2013051786A1 (en) | Apparatus and method for measuring road flatness | |
| EP2744694A2 (en) | Camera apparatus of vehicle | |
| WO2013051801A1 (en) | Display apparatus and method for assisting parking | |
| WO2018101664A1 (en) | Pedestrian protection system and operating method thereof | |
| WO2016108441A1 (en) | Apparatus for controlling forced light up of brake lights | |
| WO2020145664A1 (en) | Camera device | |
| WO2020231128A1 (en) | Steering control device and method therefor, and steering control system | |
| WO2014084594A1 (en) | Apparatus and method for monitoring traffic violations | |
| WO2015102121A1 (en) | Apparatus for warning of occurrence of error of device | |
| WO2021033813A1 (en) | Safe driving assistance device and assistance method | |
| WO2021177555A1 (en) | Steering assistance system provided in steering wheel and steering control method using same | |
| WO2013009058A2 (en) | Apparatus and method for controlling high lamp of vehicle | |
| WO2020122555A1 (en) | Steering control system, steering control device, and steering control method | |
| WO2021049814A1 (en) | Steering control apparatus, method therefor and steering system | |
| WO2019083250A1 (en) | Vehicle signal transmission device and method therefor | |
| WO2019098575A1 (en) | Electrical control system | |
| WO2018124389A1 (en) | Method and apparatus for preventing collision between vehicles |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application | Ref document number:19942519 Country of ref document:EP Kind code of ref document:A1 | |
| NENP | Non-entry into the national phase | Ref country code:DE | |
| 122 | Ep: pct application non-entry in european phase | Ref document number:19942519 Country of ref document:EP Kind code of ref document:A1 |