WO2021000370A1 - Control method and automated guided vehicle - Google Patents
Control method and automated guided vehicleDownload PDFInfo
- Publication number
- WO2021000370A1 WO2021000370A1PCT/CN2019/098394CN2019098394WWO2021000370A1WO 2021000370 A1WO2021000370 A1WO 2021000370A1CN 2019098394 WCN2019098394 WCN 2019098394WWO 2021000370 A1WO2021000370 A1WO 2021000370A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- deviation
- guided vehicle
- automatic guided
- lateral displacement
- control method
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images









Classifications
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D3/00—Control of position or direction
- G05D3/12—Control of position or direction using feedback
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
Definitions
- the inventionrelates to the field of intelligent storage, in particular to a control method for an automatic guided vehicle and an automatic guided vehicle.
- a parcel sorting systemcomposed of sorting robots came into being. This system not only ensures efficient parcel sorting, but also has real-time Responsive and distributed flexibility.
- automated guided vehiclesAGV have been increasingly used to replace or supplement manual labor.
- the automated guided vehiclecan automatically receive the article handling task, under the control of the program, reach the first position, obtain the article, and then walk to the second position, unload the article, and continue to perform other tasks.
- Unmanned handling robotshave been widely used in warehousing, logistics, automobiles, retail and other industries. They are mainly used to replace traditional manpower and realize the "goods to people" mode of unmanned handling operations. Although the traditional shelf-to-person model solves the problem of difficult transportation, not all items on the transported shelves will be fully utilized, and there is still a certain degree of waste of resources.
- the intelligent material box robotreplaces the original fixed shelf goods placement by realizing the transportation of the material box, and realizes the full utilization of the carrying shelf.
- the present inventionproposes a control method for an automatic guided vehicle, the automatic guided vehicle having a vehicle body and a grasping mechanism provided on the vehicle body, and the control method include:
- S103Calculate the deviation of the grasping mechanism relative to the object to be conveyed, where the deviation includes one or more of a lateral displacement deviation and an angular deviation;
- the step of calculating the deviation of the grasping mechanism relative to the object to be transportedincludes: collecting the side identifier of the object to be transported, and calculating the total value based on the calibration data of the side identifier The deviation.
- the step of adjusting the positioning of the automated guided vehicleincludes: rotating the automated guided vehicle relative to its vertical axis by the angular deviation, so that the automated guided vehicle is parallel to the object to be transported Move a certain distance, and the certain distance compensates for the lateral displacement deviation and the lateral displacement caused by rotating the angular deviation.
- control methodfurther includes: issuing an alarm when the angular deviation is greater than an angular deviation threshold, or the lateral displacement deviation is greater than a lateral displacement deviation threshold.
- control methodfurther includes: determining the lateral displacement when the angular deviation is less than or equal to the angular deviation threshold, and the lateral displacement deviation is less than or equal to the lateral displacement deviation threshold Whether the deviation is greater than the predetermined value of the lateral displacement deviation; when the lateral displacement deviation is greater than the predetermined value of the lateral displacement deviation, make the automatic guided vehicle move parallel to the object to be transported to compensate for the lateral displacement deviation; otherwise, The lateral displacement deviation is not compensated.
- control methodfurther includes: determining whether the angle deviation is less than the angle deviation threshold and greater than the angle deviation setting value,
- the automatic guided vehicleis rotated relative to its vertical axis to compensate for the angle deviation; otherwise, the angle deviation is not compensated.
- the step of grabbing the object to be transportedincludes:
- the inventionalso relates to an automatic guided vehicle, including:
- the motoris installed on the vehicle body
- Traveling deviceinstalled on the vehicle body and driven by the motor
- a grabbing mechanismis arranged on the car body and can grab items from the shelf;
- the control deviceis installed on the vehicle body and configured to execute the control method as described above.
- the automatic guided vehicleis not provided with a mechanism for adjusting the angle of the grasping mechanism.
- the automated guided vehiclefurther includes a side-view camera coupled to the control device, so that the control device calculates the capture based on the image captured by the side-view camera The deviation of the mechanism relative to the item.
- the inventionalso relates to an intelligent storage system, including:
- a dispatching systemcommunicates with the automatic guided vehicle, and the automatic guided vehicle can be assigned the task of transporting bins from the shelves.
- the present inventionalso relates to a control method for an automatic guided vehicle.
- the automatic guided vehiclehas a vehicle body and a grasping mechanism arranged on the vehicle body.
- the target to be placedis located on the grasping mechanism, and the control Methods include:
- S301Control the automatic guided vehicle to move closer to the delivery position
- S304Adjust the amount of expansion and contraction of the grabbing mechanism according to the deviation of the amount of expansion and contraction of the object to be placed relative to the grabbing mechanism in the expansion and contraction direction;
- the step of calculating the deviation of the object to be placed relative to the gripping mechanism in the telescopic directioncomprises: collecting the bottom identifier of the object to be transported, and the calculation based on the bottom identifier The calibration data is used to calculate the deviation of the target to be placed relative to the gripping mechanism in the telescopic direction.
- control methodfurther includes:
- the step S307includes: making the angle deviation of the rotation of the automatic guided vehicle relative to its vertical axis, so that the automatic guided vehicle moves a certain distance parallel to the object to be transported, so The certain distance compensates for the lateral displacement deviation and the lateral displacement caused by rotating the angular deviation.
- control methodfurther includes: issuing an alarm when the angular deviation is greater than an angular deviation threshold, or the lateral displacement deviation is greater than a lateral displacement deviation threshold.
- control methodfurther includes: the control method further includes: when the angle deviation is less than or equal to the angle deviation threshold, and the lateral displacement deviation is less than or equal to the lateral displacement deviation threshold When, determine whether the lateral displacement deviation is greater than the predetermined value of the lateral displacement deviation; when the lateral displacement deviation is greater than the predetermined value of the lateral displacement deviation, make the automatic guided vehicle move parallel to the object to be transported to compensate The lateral displacement deviation; otherwise, the lateral displacement deviation is not compensated.
- control methodfurther includes: determining whether the angle deviation is less than the angle deviation threshold and greater than the angle deviation setting value,
- the step S304includes:
- the positioning of the automatic guided vehicleis restored.
- the inventionalso relates to an automatic guided vehicle, including:
- the motoris installed on the vehicle body
- Traveling deviceinstalled on the vehicle body and driven by the motor
- a grasping mechanismis arranged on the vehicle body, and can grab items from the shelf and place the items on the shelf;
- the control deviceis installed on the vehicle body and configured to execute the control method as described above.
- the automatic guided vehicleis not provided with a mechanism for adjusting the angle of the grasping mechanism.
- the inventionalso relates to an automatic guided vehicle, including:
- the motoris installed on the vehicle body
- Traveling deviceinstalled on the vehicle body and driven by the motor
- a side-view camerawhich is arranged on the vehicle body or the grasping mechanism to take images of the front or side of the automatic guided vehicle;
- the top-view camerais arranged on the vehicle body or the grasping mechanism to take an image of the bottom of the article carried on the grasping mechanism.
- the automated guided vehiclefurther includes a control device, which is coupled with the side-view camera and the top-view camera, and is configured to execute the control method described above.
- the automatic guided vehiclefurther includes a lifting device, which is arranged between the grasping mechanism and the vehicle body, and can raise or lower the grasping mechanism, wherein The automatic guided vehicle is not provided with a mechanism for adjusting the angle of the grasping mechanism.
- the inventionalso relates to an intelligent storage system, including:
- a shelf, on which a material box can be placed, and the shelfhas an identifier
- a dispatching systemcommunicates with the automatic guided vehicle, and the automatic guided vehicle can be assigned the task of transporting bins from the shelves.
- the present inventionrelates to the technical field of end vision compensation control of an unmanned transport robot (Automated Guided Vehicle, AGV for short), in particular to a method for combining vision sensor data with motion control images to form a visual correction compensation control, in particular to a method for The intelligent bin robot uses visual sensors to identify the shelf markers and feedback and compensate the control method of the end positioning.
- AGVAutomated Guided Vehicle
- Figure 1shows a schematic diagram of the scene of using an automated guided vehicle to transport and process the material box
- Figure 2shows an enlarged view of the shelves and bins
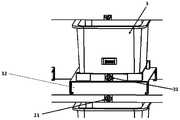
- Figure 3shows an enlarged view of the grasping mechanism
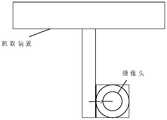
- Figure 4shows a top view of the grasping mechanism
- Figure 6shows the coordinate definition according to the first aspect of the present invention
- Figure 7schematically shows the distance from the center of the lens to the center of the fork along the direction of movement
- Figure 8shows a control method of an automatic guided vehicle according to a preferred embodiment of the present invention
- Figure 9shows a control method for an automatic guided vehicle according to the second aspect of the present invention.
- Figure 10shows a coordinate system according to the second aspect of the present invention.
- Fig. 11shows a control method of an automatic guided vehicle according to a preferred embodiment of the present invention.
- first and secondare only used for descriptive purposes, and cannot be understood as indicating or implying relative importance or implicitly indicating the number of indicated technical features. Therefore, the features defined with “first” and “second” may explicitly or implicitly include one or more of the features. In the description of the present invention, “plurality” means two or more than two, unless otherwise specifically defined.
- connectionshould be interpreted broadly. For example, they can be fixed or detachable. Connected or integrally connected: it can be mechanical connection, electrical connection or mutual communication; it can be directly connected or indirectly connected through an intermediate medium, it can be the internal communication of two components or the interaction of two components relationship.
- connectionshould be interpreted broadly. For example, they can be fixed or detachable. Connected or integrally connected: it can be mechanical connection, electrical connection or mutual communication; it can be directly connected or indirectly connected through an intermediate medium, it can be the internal communication of two components or the interaction of two components relationship.
- the first feature "on” or “under” the second featuremay include the first and second features in direct contact, or may include the first and second features Not in direct contact but through other features between them.
- the "above”, “above”, and “above” the first feature on the second featureincludes the first feature directly above and diagonally above the second feature, or simply means that the first feature is higher in level than the second feature.
- the “below”, “below” and “below” of the first feature of the second featureinclude the first feature directly above and obliquely above the second feature, or only that the level of the first feature is smaller than the second feature.
- Figure 1shows a schematic diagram of a scenario where an automated guided vehicle is used to transport and process the bins.
- the automated guided vehicle 1includes a vehicle body (chassis), wheels, a grasping mechanism 11 and other components.
- the wheelsare installed on the vehicle body and can be driven by motors to perform various motion operations on the ground, such as forwarding, retreating, turning, and rotating in place (for example, rotating a certain angle around its virtual longitudinal axis).
- Fig. 1schematically shows that the automated guided vehicle 1 includes a grasping mechanism 11, for example, a grasping mechanism in the form of a telescopic fork.
- a grasping mechanism 11for example, a grasping mechanism in the form of a telescopic fork.
- the boxcan be grabbed from the shelf, or the box on the telescopic fork can be placed on the shelf.
- the specific structure of the telescopic forkis described later and shown in other drawings.
- the shelf 2is also shown in FIG. 1.
- the shelf 2is, for example, a shelf with multiple rows and multiple columns, and has multiple storage spaces thereon, and multiple bins 3 can be placed.
- the shelf 2corresponds to each storage space, and may carry a corresponding shelf identifier 21, such as a two-dimensional code or a positioning code.
- the related information of the storage spacecan be obtained from the two-dimensional code or positioning code.
- the positioning of the camera relative to the shelfsuch as coordinates and angular orientation, can be obtained.
- the ground positioning mark 4may be in the form of a two-dimensional code or a magnetic strip, for example, and is used to assist the navigation of the automatic guided vehicle 1.
- the automatic guided vehicle 1plans the transportation path after receiving the transportation task issued by the dispatch controller, and then moves along the transportation path.
- the camera on the automatic guided vehicle 1captures the two-dimensional code on the ground, or the magnetic stripe sensing device senses the magnetic strip on the ground, so as to ensure that the automatic guided vehicle 1 advances along the correct path. I won't repeat them here.
- the ground positioning identifieris discontinuous, and the parking position of the automatic guided vehicle can only be located above the ground identifier, but not between the ground identifiers.
- the center of the automated guided vehicleis parked above one of the ground location identifiers.
- the material box 3is placed on the shelf 2.
- the material box 3also has a corresponding side identifier 31, which can be in the form of a two-dimensional code or a positioning code. 3 related information.
- the bottom of the material box 3may also be provided with a bottom identifier. Details will be described later.
- the angle and/or position of the camera or the camera's carrierfor example, an automatic guided vehicle
- One or more camerasmay be provided on the automated guided vehicle 1 for image collection, such as collecting identifiers on the shelves, side identifiers on the bins, and bottom identifiers.
- image processingthe relative positioning of the grab mechanism of the automated guided vehicle with respect to the bin/shelf and the relative positioning of the bin on the grab mechanism can be obtained.
- FIG. 2shows an enlarged view of the shelf 2 and the bin 3. As shown in Fig. 2, there is a tray below the material box 3 to form a gap 31, and the telescopic fork can be inserted into the gap 31 for lifting. FIG. 2 also shows the bin side identifier 31 and the shelf identifier 21.
- FIG. 3shows enlarged views of the grasping mechanism 11.
- the grasping mechanism 11may be, for example, in the form of a telescopic fork, which can extend toward the direction of the material box (for example, the upward direction in Figure 4 Direction), or retreat in the direction away from the material box (for example, the downward direction in Figure 4).
- FIG. 3also shows a side camera 12 and a top-view camera 13 provided on the automated guided vehicle 1.
- the side camera 12 and the top-view camera 13are, for example, installed below the grasping mechanism 11, where the side camera 12 faces the side. Referring to FIG. 1, it can be used to photograph the side identifier 31 and the shelf identifier 21 of the container. ;
- the top-view camera 13is facing upwards, as shown in FIG. 3, for example, the identifier on the bottom of the bin placed on the grasping mechanism 11 can be photographed.
- the automatic guided vehicle 1also has a control unit or an image processing device (not shown) for processing the images collected by each camera to obtain information in the image, such as the identifier or the information in the QR code. Encoded information, and obtain the relative positioning information of the gripping mechanism relative to the bin (such as relative height information, displacement deviation information along the left and right directions, and relative angle deviation information, etc.).
- the automatic guided vehicle 1first receives the transportation task, and under the guidance of the ground positioning mark 4, arrives in front of the appropriate shelf 2. Subsequently, the automatic guided vehicle 1 uses its lifting device to change the height of the grasping mechanism 11 so that it is positioned at the same height as the material box to be grasped, and then drives the grasping mechanism 11 through a motor so that the driving device extends outward, Reach into the gap below the material box pallet, then lift the material box pallet and move back to complete the grabbing operation of the material box.
- the automatic guided vehiclefor example, the automatic guided vehicle 1 described above, has a vehicle body and a grasping mechanism 11 provided on the vehicle body.
- the control methodincludes:
- step S101the automatic guided vehicle is controlled to move close to the object to be transported.
- the automated guided vehicle 11receives a handling task from an upstream dispatching unit, for example, the handling task relates to a specific container, and the automated guided vehicle 11 learns the storage location of the container, such as which shelf it is located on. After that, the automated guided vehicle 11 is guided by the ground positioning mark 4 and approaches the shelf, for example, is positioned in front of the bin.
- step S102the grasping mechanism is raised or lowered to the height of the object to be conveyed.
- the automatic guided vehicle 11can know the height of the material box according to the transportation task of the material box, for example, which layer of the shelf is stored on, so as to calculate its height.
- the handling taskitself may include the height information of the storage bin.
- the automatic guided vehicleafter receiving the handling task, can query the database on which layer of the shelf the material box is stored, so that the height of the material box can be known, and then the lifting mechanism can be controlled. High or lower to the height of the bin.
- step S103the deviation of the grasping mechanism relative to the object to be conveyed is calculated, and the deviation includes one or more of a lateral displacement deviation and an angular deviation.
- steps S101 and S102the automatic guided vehicle is positioned in front of the material box and the grasping mechanism is positioned at the height of the material box, due to the on-site positioning control accuracy of the automatic guided vehicle, a sufficiently high accuracy may not be guaranteed. Therefore, after steps S101 and S102, it is also necessary to obtain the deviation of the automatic guided vehicle or the grasping mechanism relative to the to-be-carried material box and make corresponding adjustments to further improve the positioning accuracy. Otherwise, the gripping mechanism may not be able to perform operations accurately when gripping the bin. For example, the gap below the material box 3 shown in Figure 2 is for the insertion of a telescopic fork-type grasping mechanism.
- the left-right dimension of the gapis approximately the same as the width of the telescopic fork. Therefore, if the telescopic fork is not aligned with the gap For example, if there is a certain deviation in the left and right directions, or a certain deviation in the angular direction (for example, a large deviation of 90 degrees), then interference or collision may occur during the grasping process, resulting in the failure to grasp the bin normally.
- the common deviationsmainly include the deviation of the lateral displacement direction and the angle deviation.
- the lateral displacement directionrefers to the direction in which the automatic guided vehicle moves, that is, the left and right directions in FIG. 1.
- the deviation in the lateral directionmay be caused by the position deviation of the automatic guided vehicle when it is parked, or it may be caused by the position deviation of the material box placed on the shelf. Both of these may cause the automatic guided vehicle and the material box to not be in the same position. Ideal relative position.
- Angle deviationrefers to the deviation of the angle of the gripping mechanism relative to the bin in the horizontal direction. Take the telescopic fork-type grasping mechanism as an example.
- the telescopic forkshould be perpendicular to the material box so as to be vertically inserted into the gap in the lower part of the material box to complete the grasping operation.
- the angle between the telescopic fork and the gap (or material box)may not be 90 degrees, for example, 88 degree. In this case, the angle between the two needs to be calculated and adjusted. Otherwise, the tray may interfere or collide during the process of inserting into the lower space of the material box, making it impossible to carry out the grasping operation.
- step S104the positioning of the automatic guided vehicle is adjusted according to the lateral displacement deviation and/or the angle deviation.
- the positioning of the automatic guided vehicleis adjusted according to the deviation, for example, the automatic guided vehicle (reversely) moves by the amount of the lateral displacement deviation, thereby Eliminate the lateral displacement deviation; make the automatic guided vehicle (reverse) rotate the amount of the angular deviation, thereby eliminating the angular deviation.
- the position of the automatic guided vehiclecan be adjusted to make the grasping mechanism align with the material box, without the need to separately adjust the positioning of the grasping mechanism. Therefore, there is no need to increase the rotation axis of the grabbing mechanism and the rotation driving mechanism of the grabbing mechanism, which reduces the control dimension and difficulty and has a wider application range.
- step S105grab the object to be transported.
- the deviationincludes lateral displacement deviation, angular deviation and height deviation.
- the method 100further includes adjusting the height of the grasping mechanism according to the height deviation.
- the deviation of the grasping mechanism relative to the object to be transportedis calculated in the following manner (the deviation includes a lateral displacement deviation and an angular deviation): collecting the to-be transported The side identifier of the target, and the deviation is calculated based on the calibration data of the side identifier. This is described in detail below.
- the side-view camera 12 of the automatic guided vehicle 1is used to photograph the side identifier 31 (for example, two Dimension code).
- the control unit or image processing unit of the automated guided vehicledecodes the picture and processes it accordingly, and obtains the height information x of the current bin to be grabbed, the body movement direction information y, the depth information z from the camera to the marker, and the target and
- the angle information ⁇ of the vehicle body, and the coordinate definitionis shown in Figure 6 (where the YZ plane is the horizontal plane, the Y direction is the moving direction of the automatic guided vehicle, and the X direction is the vertical direction).
- the side identifier of the binfor example, there are three small positioning black blocks, and the side identifier is photographed. For example, through these three small positioning black blocks, image processing algorithms (such as perspective Transformation algorithm), the four parameters xyz ⁇ can be obtained. I will not repeat how to obtain these parameters through image processing algorithms.
- image processing algorithmssuch as perspective Transformation algorithm
- the calculated image datais calculated with the calibration data of the identifier to obtain the deviation data of the captured target.
- the calculation methodis as shown in formula (1), where x, y, ⁇ are the data of the calculated image, x b , y b , ⁇ b is the data of the calibration image, ⁇ x, ⁇ y, ⁇ are the deviation data (respectively the height deviation, the lateral displacement deviation and the angle deviation).
- the lateral displacement caused by rotationcan be compensated as follows:
- ⁇ y ⁇is the movement direction deviation compensation amount including the angular deviation
- zis the depth from the center of the identifier to the center of the lens
- dis the distance from the center of the lens to the center of the telescopic fork along the direction of movement (as shown in Figure 7)
- ⁇The angle calculated by the end positioning algorithm. In this way, ⁇ y ⁇ can compensate for the lateral displacement deviation and the lateral displacement caused by rotating the angular deviation.
- the compensation information ⁇ y ⁇ and ⁇ corresponding to the movement and rotation of the car bodywill be automatically guided by the relative motion compensation at the current parking position, and finally the overall Compensation adjustment of deviation, complete accurate capture.
- the angle deviation of the rotation of the automatic guided vehicle relative to its vertical axisis caused to move the automatic guided vehicle parallel to the object to be transported a certain distance, and the certain distance compensates for the lateral displacement deviation and rotates the Lateral displacement caused by angular deviation.
- xis the current absolute position height of the grasping mechanism
- ⁇ xis the compensation amount of the marker height calculated by the end positioning algorithm
- x cis the absolute position height of the grasping mechanism after compensation.
- Fig. 8shows a method 200 according to a preferred embodiment of the present invention. This will be described in detail below with reference to FIG. 8.
- Steps S201, S202, and S203 in the method 200are the same as the steps S101, S102, and S103 in the method 100, respectively, and will not be repeated here.
- step S204it is determined whether the angle deviation is greater than the angle deviation threshold, the angle deviation threshold is 3.5 degrees, for example.
- the processproceeds to step S205, and an error message indicating that the angle deviation is too large is issued, indicating that there is a failure in the guidance and control of the automatic guided vehicle and the intervention of the staff is required. Otherwise, proceed to step S206 to determine whether the lateral displacement deviation is greater than the lateral displacement deviation threshold, for example, 37 mm.
- step S207When the lateral displacement deviation is greater than the threshold, proceed to step S207, and issue an error message indicating that the lateral displacement deviation is too large, indicating that the system is malfunctioning. Otherwise, proceed to step S208 to determine whether the height deviation is greater than the threshold, for example, 5 mm. If the height deviation is greater than the threshold, proceed to step S209 to increase or decrease the height of the grasping mechanism for compensation. Otherwise, proceed to step S210 to determine whether the lateral displacement deviation is greater than a preset value (for example, 3 mm) and smaller than the aforementioned threshold value (for example, 37 mm), if yes, then proceed to step S211 to perform lateral motion compensation.
- a preset valuefor example, 3 mm
- the aforementioned threshold valuefor example, 37 mm
- step S212determines whether the angle deviation is greater than or equal to the preset value but less than the above-mentioned threshold. If yes, perform the angle rotation of the automatic guided vehicle to compensate for the angular deviation, for example, use the automatic guided vehicle chassis motor differential on the code Fine-tune the rotation and adjust the angle of the automatic guided vehicle to compensate the correction to a suitable angle; otherwise, the angle deviation may not be adjusted.
- the left and right movement compensation performed in step S211compensates for the lateral displacement deviation and the lateral displacement caused by rotating the angle deviation, and at the same time, steps S210 and S211 are preferably placed downstream of steps S212 and S213.
- step S214After the compensation adjustment operation is over, proceed to step S214, extend the telescopic fork, and then perform the collision/limit detection of step S215. If a collision/limit is detected, then in step S216, a collision/limit error is issued, otherwise, In step S217, the telescopic fork is retracted, which indicates that the cargo grabbing is completed, and then the angle is first moved to the initial angle and then the relative position is restored to the parked position, that is, to the position of the automated guided vehicle after the end of step S201. Specifically, it includes: in step S218, the angle is returned to the right, in step S219, the left and right directions return to the center of the ground positioning identification code, the action ends, and the automatic guided vehicle is ready to travel to the next target point.
- the angular deviationis less than or equal to the angular deviation threshold and the lateral displacement deviation is less than or equal to the lateral displacement deviation threshold, it is determined whether the lateral displacement deviation is greater than a predetermined value of the lateral displacement deviation; When the lateral displacement deviation is greater than the predetermined value of the lateral displacement deviation, the automatic guided vehicle is moved parallel to the object to be transported to compensate for the lateral displacement deviation; otherwise, the lateral displacement deviation is not compensated.
- the automatic guided vehicleRotate relative to its vertical axis to compensate for the angular deviation; otherwise, the angular deviation is not compensated.
- the step of grabbing the object to be transportedincludes: extending the grabbing mechanism to the object to be transported; performing collision/limit detection, and in the case of no collision/limit detection, acquiring The target to be transported and the grabbing mechanism are retracted; and the positioning of the automatic guided vehicle is restored according to the lateral displacement deviation and/or the angle deviation.
- Fig. 9shows a control method 300 for an automatic guided vehicle according to an embodiment of the present invention.
- the automatic guided vehiclehas a vehicle body and a grasping mechanism arranged on the vehicle body, and the target to be placed is located on the grasping mechanism, such as the automatic guided vehicle 1 described above with reference to FIGS. 1-4.
- the control method 300is, for example, used to place a bin on a shelf, the bottom of the bin has a bottom identifier, similar to the side identifier 31 described above. The following describes with reference to FIG. 9.
- control methodincludes:
- step S301the automatic guided vehicle is controlled to move closer to the delivery position.
- the automated guided vehicle 11receives a transport task for placing a material box, and knows the target storage location of the material box, for example, which shelf it is located on. After that, under the guidance of the ground positioning mark 4, the automatic guided vehicle 11 moves the carrier's bin to move closer to the shelf, for example, to be positioned in front of the target storage position.
- step S302the grabbing mechanism is raised or lowered to the height of the delivery position.
- step S303the deviation in the telescopic direction of the target to be placed relative to the grasping mechanism is calculated.
- the automatic guided vehiclecan, for example, use its top-view camera to photograph the identification code at the bottom of the bin on the gripping mechanism, and compare the information obtained by decoding with the calibration data, so as to obtain the telescopic direction of the bin relative to the gripping mechanism The deviation. This will be described in detail below.
- step S304the amount of expansion and contraction of the grabbing mechanism is adjusted according to the deviation of the object to be placed in the expansion and contraction direction relative to the grabbing mechanism.
- step S305the target to be placed is placed on the delivery position.
- step S303A preferred embodiment implemented in step S303 is described below.
- the bottom identifier of the binis similar to the side identifier described above.
- the bottom identifieris photographed.
- the image Processing algorithmssuch as perspective transformation algorithms
- Iwill not repeat how to obtain these parameters through image processing algorithms. Those of ordinary skill in the art will know how to do this.
- the coordinate system of the material box on the grasping mechanismis shown in Figure 10, where the XY plane is the horizontal plane, the Y axis is the movement direction of the automatic guided vehicle, and the Z axis is the vertical direction.
- the deviation of the material box in the telescopic direction relative to the telescopic fork gripping mechanismcan be obtained.
- the identifier of the bottom of the object to be transportedis collected, and the deviation of the object to be placed in the telescopic direction relative to the grasping mechanism is calculated based on the calibration data of the bottom identifier in the control unit or the image processing device. This is described in detail below.
- y uis the deviation information between the center of the material box and the center of the fork arm in the direction of the body movement
- x uis the information of the center of the material box and the center of the fork arm in the telescopic direction of the gripping mechanism
- ⁇ uis the information about the deviation angle of the cargo relative to the body.
- z uis the depth information from the QR code to the lens.
- x bis the information of the calibrated bin center and the center of the fork arm in the telescopic direction of the gripping mechanism
- ⁇ x uis the deviation information of the telescopic amount to be compensated.
- step S304the amount of expansion and contraction of the grabbing mechanism is adjusted according to the deviation of the object to be placed in the expansion and contraction direction relative to the grabbing mechanism.
- the telescopic forkextends/retracts at a distance of 100 when the telescopic fork is placed or picked up. If the position of the material box on the telescopic fork deviates from the ideal position (that is, the calibration data corresponding to the bottom identifier), then the telescopic fork needs to be adjusted. For example, when the material box is more outside relative to the ideal position, that is, closer to the edge of the telescopic fork, and closer to the shelf, in this case, the telescopic fork does not need to maintain 100, but can be adjusted to 100 minus the above The amount of expansion deviation.
- the telescopic forkdoes not need to maintain 100, but can be adjusted to 100 plus the above
- the deviation of the telescopic amountmeans that the telescopic fork needs to extend a greater distance.
- itfurther includes calculating the deviation of the grasping mechanism relative to the delivery position, including one or more of the lateral displacement deviation and the angular deviation; according to the lateral displacement deviation and the angular deviation , Adjust the positioning of the automated guided vehicle.
- the method in the method 100/200 of the embodiment of the present inventioncan be used.
- the differenceis that the shelf identifier 21 is used instead of the bin Side identifier 31.
- the calibration data information of the shelf identifier 21is used. I won't repeat them here.
- the step of adjusting the positioning of the automated guided vehicleincludes: making the angle deviation of the rotation of the automated guided vehicle relative to its vertical axis so that the automated guided vehicle is parallel to the The object to be transported moves a certain distance, and the certain distance compensates for the lateral displacement deviation and the lateral displacement caused by the rotation of the angular deviation.
- step S401the automated guided vehicle is controlled to approach the delivery position, for example, to park in front of the target shelf through the ground positioning identifier.
- the material box to be placedis now located on the grabbing mechanism of the automatic guided vehicle.
- step S402the gripping mechanism is raised or lowered to the height of the delivery position. I won't repeat them here.
- steps S401 and S402preliminary preparations have been made for placing the goods, but due to the position of the material box on the grasping mechanism (for example, telescopic fork), there may be a certain deviation from the ideal position (for example, the material box is here). Too close to the edge of the telescopic fork/too close to the shelf, or the bin is too far away from the edge of the telescopic fork/too far away from the shelf), or the position and angle of the automatic guided vehicle relative to the shelf, relative to the ideal position and angle of the goods , With a certain deviation (lateral displacement deviation and angle deviation), the telescopic fork needs to be corrected, and the position and angle orientation of the automatic guided vehicle must be corrected to ensure the smooth placement of the bin on the shelf.
- the ideal positionfor example, the material box is here.
- the bottom identifier of the material boxcan be photographed by the top-view camera, and the identification information of the bottom identifier can be obtained through image processing. After the calibration information (calibration data) is compared, the deviation information of the expansion and contraction amount to be compensated is obtained. I won't repeat them here.
- the shelf identifier 21can be photographed by the side-view camera and image processing is performed to obtain the identification information of the shelf identifier, which is compared with the calibration information (calibration data) of the shelf identifier After the alignment, the deviation of the grasping mechanism relative to the delivery position, such as lateral displacement deviation and angular deviation, is obtained.
- the method in the method 100/200 of the embodiment of the present inventioncan be used, except that the shelf identifier 21 is used instead of the bin identifier 31. I won't repeat them here.
- step S404it is determined whether the angle deviation is greater than the angle deviation threshold, which is, for example, 3.5 degrees.
- the angle deviation thresholdis, for example, 3.5 degrees.
- step S405When the angle is greater than the threshold, proceed to step S405, and issue an error warning that the angle deviation is too large to remind the manager to intervene. Otherwise, proceed to step S406 to determine whether the lateral displacement deviation is greater than the lateral displacement deviation threshold, for example, 37 mm.
- step S407When the lateral displacement deviation is greater than the threshold, proceed to step S407, and issue an error message indicating that the lateral displacement deviation is too large to remind the manager to intervene. Otherwise, proceed to step S408 to determine whether the height deviation is greater than a threshold, for example, 5 mm.
- step S414determines whether the sum of the standard telescopic amount of the telescopic fork and the compensation telescopic amount/the deviation (signed) is greater than or equal to the maximum stroke of the telescopic fork.
- the deviation of the amount of expansion and contractioncan be a signed amount. For example, when the material box is too close to the edge of the telescopic fork/too close to the shelf, the expansion amount deviation is negative; when the material box is too far away from the edge of the telescopic fork/too far away from the shelf, the expansion amount deviation is positive.
- step S415If it is greater than or equal to the maximum stroke of the telescopic fork, proceed to step S415 to extend the telescopic fork to the maximum stroke; otherwise, according to the compensated telescopic amount (the sum of the standard telescopic amount and the compensated telescopic amount / telescopic amount deviation), the telescopic fork is extended The fork sticks out.
- the compensated telescopic amountthe sum of the standard telescopic amount and the compensated telescopic amount / telescopic amount deviation
- the compensation of the height deviationadopts an absolute position control method, for example, the gripping mechanism is moved along the vertical direction for calibration, as described in the above formula 3, which will not be repeated here.
- the gripping mechanism expansion compensationalso adopts the absolute position control method, and the calculation is as follows:
- x sis the set standard expansion and contraction amount of the grasping mechanism.
- ⁇ x uis the marker expansion compensation amount calculated by the top-view end positioning algorithm
- x tcis the absolute position expansion and contraction amount of the grasping mechanism after compensation.
- the motion (lateral) direction and angle compensationadopt linear velocity and angular velocity control methods, and perform relative motion compensation at the current parking position through micro-movement, that is, automatically guide the compensation information ⁇ y ⁇ and ⁇ corresponding to the movement and rotation of the car body. Finally realize the compensation adjustment of the overall deviation and complete the accurate placement.
- the inventionhas the advantages of relying on the vision sensor and changing the relative position of the AGV at the stopping point to realize deviation correction.
- the control methodreduces the self-rotating shaft of the grasping mechanism, reduces the control dimension and difficulty, and has a larger scope of application.
- the control of the grasping mechanismadopts an absolute position control method.
- the servo motor drive encoderis controlled by setting the zero point and the number of pulses issued, which can improve the control accuracy and the motion repeat accuracy, thereby increasing the success rate of grasping.
- control methodfurther includes: issuing an alarm when the angular deviation is greater than the angular deviation threshold, or the lateral displacement deviation is greater than the lateral displacement deviation threshold.
- the control methodfurther includes: when the lateral displacement deviation is greater than a predetermined value, making the automatic guided vehicle rotate the angle deviation relative to its vertical axis to make the automatic
- the guided vehiclemoves a certain distance parallel to the object to be transported, and the certain distance compensates for the lateral displacement deviation and the lateral displacement caused by the rotation of the angular deviation; when the lateral displacement deviation is less than the predetermined value of the lateral displacement deviation, The automatic guided vehicle rotates by a certain angle relative to its vertical axis to compensate for the lateral displacement deviation and/or the angular deviation.
- the automatic guided vehicleis rotated relative to its vertical axis to compensate for the angular deviation, and the automatic guided vehicle moves a certain distance parallel to the object to be transported. Distance compensation of the lateral displacement deviation and the lateral displacement caused by the rotation of the angular deviation.
- control methodfurther includes: issuing an alarm when the angular deviation is greater than an angular deviation threshold, or the lateral displacement deviation is greater than a lateral displacement deviation threshold.
- control methodfurther includes: determining the lateral displacement deviation when the angular deviation is less than or equal to the angular deviation threshold and the lateral displacement deviation is less than or equal to the lateral displacement deviation threshold. Whether it is greater than the predetermined value of lateral displacement deviation; when the lateral displacement deviation is greater than the predetermined value of lateral displacement deviation, make the automatic guided vehicle move parallel to the object to be transported to compensate for the lateral displacement deviation; otherwise, no Compensate the lateral displacement deviation.
- the grasping mechanismdetermines whether the sum of the standard telescopic amount of the grasping mechanism and the deviation of the telescopic amount is greater than the maximum telescopic stroke of the grasping mechanism; if it is greater than the maximum telescopic stroke, the grasping mechanism is extended The maximum telescopic stroke; otherwise, extend the gripping mechanism according to the sum of the standard telescopic amount of the gripping mechanism and the deviation of the telescopic amount.
- An embodiment of the present inventionalso relates to an automatic guided vehicle, such as the automatic guided vehicle 1 as shown in FIGS. 1-4. It includes: car body; and
- the motoris installed on the vehicle body
- Traveling deviceinstalled on the vehicle body and driven by the motor
- the control deviceis installed on the vehicle body and configured to execute the control method 100/200/300/400 as described above.
- the automatic guided vehicleis not provided with a mechanism or device for adjusting the angle of the grasping mechanism, so that the control difficulty of the automatic guided vehicle can be greatly reduced.
- the automated guided vehiclefurther includes a side-view camera coupled with the control device, so that the control device calculates the relative position of the grasping mechanism relative to the image captured by the side-view camera. Describe the deviation of the item.
- One embodiment of the present inventionrelates to an automatic guided vehicle, such as the automatic guided vehicle 1 as shown in FIGS. 1-4. It includes: car body; and
- the motoris installed on the vehicle body
- Traveling deviceinstalled on the vehicle body and driven by the motor
- a grasping mechanismis arranged on the vehicle body, and can grab items from the shelf and place the items on the shelf;
- a side-view camerawhich is arranged on the vehicle body or the grasping mechanism to take images of the front or side of the automatic guided vehicle;
- the top-view camerais arranged on the vehicle body or the grasping mechanism to take an image of the bottom of the article carried on the grasping mechanism.
- the automated guided vehiclefurther includes a control device, which is coupled with the side-view camera and the top-view camera, and is configured to execute the control method 100/200/300 as described above /400.
- the automatic guided vehiclefurther includes a lifting device, which is arranged between the grasping mechanism and the vehicle body, and can raise or lower the grasping mechanism.
- the automatic guided vehicleis not provided with a mechanism or device for adjusting the angle of the grasping mechanism, so that the control difficulty of the automatic guided vehicle can be greatly reduced.
- the inventionalso relates to an intelligent storage system, including:
- a dispatching systemcommunicates with the automatic guided vehicle, and the automatic guided vehicle can be assigned the task of transporting bins from the shelves.
- the position correctioncan be achieved by relying on the visual sensor and changing the relative position of the AGV at the stopping point.
- This control methoddoes not need to increase the self-rotating axis of the grasping mechanism, reduces the control dimension and difficulty, and has a larger scope of application. . Adjust the automatic guided vehicle instead of the gripping mechanism.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Warehouses Or Storage Devices (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Description
Translated fromChinese本发明涉及智能仓储领域,尤其涉及一种用于自动引导车的控制方法以及自动引导车。The invention relates to the field of intelligent storage, in particular to a control method for an automatic guided vehicle and an automatic guided vehicle.
随着我国电商行业的高速发展,物流的各个环节也出现了多样化的需求,由分拣机器人组成的包裹分拣系统应运而生,该系统在保证包裹分拣高效的同时,还具有即时响应和分布式的灵活性。在当前的物流仓储领域,已经越来越多的使用了自动引导车(AGV)来代替或者补充人工劳动。自动引导车能够自动接收物品搬运任务,在程序控制下,到达第一位置,取得物品,然后行走到第二位置,将物品卸下,继续去执行其他的任务。With the rapid development of my country’s e-commerce industry, diversified demands have also emerged in all aspects of logistics. A parcel sorting system composed of sorting robots came into being. This system not only ensures efficient parcel sorting, but also has real-time Responsive and distributed flexibility. In the current logistics and warehousing field, automated guided vehicles (AGV) have been increasingly used to replace or supplement manual labor. The automated guided vehicle can automatically receive the article handling task, under the control of the program, reach the first position, obtain the article, and then walk to the second position, unload the article, and continue to perform other tasks.
无人搬运机器人已经广泛运用于仓储物流,汽车,零售等行业,主要用于替代传统人力,实现无人搬运作业的“货到人”模式。传统的货架到人模式虽然解决了搬运难问题,但搬运的货架上不是所有物品都会被充分利用,依旧存在一定程度上的资源浪费。智能料箱机器人通过实现料箱的搬运替代原本固定货架的货物摆放,实现搬运货架的充分利用。Unmanned handling robots have been widely used in warehousing, logistics, automobiles, retail and other industries. They are mainly used to replace traditional manpower and realize the "goods to people" mode of unmanned handling operations. Although the traditional shelf-to-person model solves the problem of difficult transportation, not all items on the transported shelves will be fully utilized, and there is still a certain degree of waste of resources. The intelligent material box robot replaces the original fixed shelf goods placement by realizing the transportation of the material box, and realizes the full utilization of the carrying shelf.
如何设计良好的稳定的控制方法来准确定位车辆位置,解决搬运目标物和车辆之间的相对位置关系,对准确高效的完成搬运任务具有重要意义。无论是人为将货物放置在货架还是机器摆放货物,通常在取放货时都会存在误差,由于误差的不断积累最终会使货物无法拿取,甚至会引发重大的安全事故。针对料箱机器人的工作特点,既要准确停靠地面位置,又要准确获取料箱位置,而料箱位置和地面位置本身并不存在硬性关联,所以如何在停靠位置准确的获取料箱是一个技术难点。How to design a good and stable control method to accurately locate the position of the vehicle and solve the relative position relationship between the transport target and the vehicle is of great significance to accurately and efficiently complete the transport task. Whether it is artificially placing the goods on the shelf or the machine placing the goods, there will usually be errors when picking and placing the goods. Due to the continuous accumulation of errors, the goods will eventually become unavailable and even cause major safety accidents. According to the working characteristics of the material box robot, it is necessary to accurately dock on the ground position and accurately obtain the position of the material box, and there is no rigid correlation between the position of the material box and the ground position itself, so how to accurately obtain the material box at the parking position is a technology difficulty.
背景技术部分的内容仅仅是发明人所知晓的技术,并不当然代表本领域的现有技术。The content of the background technology is only the technology known to the inventor, and does not of course represent the existing technology in the field.
发明内容Summary of the invention
有鉴于现有技术缺陷中的至少一个,本发明提出一种用于自动引导车的控制方法,所述自动引导车具有车体和设置在所述车体上的抓取机构,所述控制方法包括:In view of at least one of the disadvantages of the prior art, the present invention proposes a control method for an automatic guided vehicle, the automatic guided vehicle having a vehicle body and a grasping mechanism provided on the vehicle body, and the control method include:
S101:控制所述自动引导车运动靠近待搬运目标;S101: Control the automatic guided vehicle to move closer to the object to be transported;
S102:将所述抓取机构升高或降低到所述待搬运目标的高度;S102: Raise or lower the grabbing mechanism to the height of the object to be transported;
S103:计算所述抓取机构相对于所述待搬运目标的偏差,所述偏差包括横向位移偏差和角度偏差中的一个或多个;S103: Calculate the deviation of the grasping mechanism relative to the object to be conveyed, where the deviation includes one or more of a lateral displacement deviation and an angular deviation;
S104:根据所述横向位移偏差和/或角度偏差,调整所述自动引导车的定位;和S104: Adjust the positioning of the automatic guided vehicle according to the lateral displacement deviation and/or the angle deviation; and
S105:抓取所述待搬运目标。S105: Grab the object to be transported.
根据本发明的一个方面,所述偏差包括横向位移偏差、角度偏差和高度偏差,所述控制方法还包括根据所述高度偏差调整所述抓取机构的高度。According to one aspect of the present invention, the deviation includes a lateral displacement deviation, an angle deviation and a height deviation, and the control method further includes adjusting the height of the grasping mechanism according to the height deviation.
根据本发明的一个方面,所述计算抓取机构相对于待搬运目标的偏差的步骤包括: 采集所述待搬运目标的侧部标识符,并基于所述侧部标识符的标定数据,计算所述偏差。According to one aspect of the present invention, the step of calculating the deviation of the grasping mechanism relative to the object to be transported includes: collecting the side identifier of the object to be transported, and calculating the total value based on the calibration data of the side identifier The deviation.
根据本发明的一个方面,所述调整自动引导车的定位的步骤包括:使所述自动引导车相对于其竖直轴线旋转所述角度偏差,使所述自动引导车平行于所述待搬运目标移动一定距离,所述一定距离补偿所述横向位移偏差以及旋转所述角度偏差带来的横向位移。According to one aspect of the present invention, the step of adjusting the positioning of the automated guided vehicle includes: rotating the automated guided vehicle relative to its vertical axis by the angular deviation, so that the automated guided vehicle is parallel to the object to be transported Move a certain distance, and the certain distance compensates for the lateral displacement deviation and the lateral displacement caused by rotating the angular deviation.
根据本发明的一个方面,所述控制方法还包括:当所述角度偏差大于角度偏差阈值,或所述横向位移偏差大于横向位移偏差阈值时,发出报警。According to an aspect of the present invention, the control method further includes: issuing an alarm when the angular deviation is greater than an angular deviation threshold, or the lateral displacement deviation is greater than a lateral displacement deviation threshold.
根据本发明的一个方面,所述控制方法还包括:当所述角度偏差小于或等于所述角度偏差阈值、且所述横向位移偏差小于或等于所述横向位移偏差阈值时,判断所述横向位移偏差是否大于横向位移偏差预定值;当所述横向位移偏差大于所述横向位移偏差预定值时,使所述自动引导车平行于所述待搬运目标移动移动以补偿所述横向位移偏差;否则,不补偿所述横向位移偏差。According to an aspect of the present invention, the control method further includes: determining the lateral displacement when the angular deviation is less than or equal to the angular deviation threshold, and the lateral displacement deviation is less than or equal to the lateral displacement deviation threshold Whether the deviation is greater than the predetermined value of the lateral displacement deviation; when the lateral displacement deviation is greater than the predetermined value of the lateral displacement deviation, make the automatic guided vehicle move parallel to the object to be transported to compensate for the lateral displacement deviation; otherwise, The lateral displacement deviation is not compensated.
根据本发明的一个方面,所述控制方法还包括:判断所述角度偏差是否小于所述角度偏差阈值并大于角度偏差设定值,According to an aspect of the present invention, the control method further includes: determining whether the angle deviation is less than the angle deviation threshold and greater than the angle deviation setting value,
如果所述角度偏差小于所述角度偏差阈值并大于角度偏差设定值,使所述自动引导车相对于其竖直轴线旋转以补偿所述角度偏差;否则,不补偿所述角度偏差。If the angle deviation is less than the angle deviation threshold and greater than the angle deviation setting value, the automatic guided vehicle is rotated relative to its vertical axis to compensate for the angle deviation; otherwise, the angle deviation is not compensated.
根据本发明的一个方面,所述抓取待搬运目标的步骤包括:According to an aspect of the present invention, the step of grabbing the object to be transported includes:
伸出所述抓取机构至所述待搬运目标;Extend the gripping mechanism to the target to be transported;
进行碰撞/限位检测,在未检测到碰撞/限位的情况下,获取所述待搬运目标并收回所述抓取机构;Carry out collision/limit detection, and if no collision/limit is detected, acquire the target to be transported and retract the grabbing mechanism;
根据所述横向位移偏差和/或角度偏差,恢复所述自动引导车的定位。According to the lateral displacement deviation and/or the angle deviation, the positioning of the automatic guided vehicle is restored.
本发明还涉及一种自动引导车,包括:The invention also relates to an automatic guided vehicle, including:
车体;Car body
电机,安装在所述车体上;The motor is installed on the vehicle body;
行进装置,安装在所述车体上并被所述电机驱动;Traveling device installed on the vehicle body and driven by the motor;
抓取机构,所述抓取机构设置在所述车体上,并可从货架上抓取物品;A grabbing mechanism, the grabbing mechanism is arranged on the car body and can grab items from the shelf;
控制装置,所述控制装置安装在所述车体上,并配置成可执行如上述的控制方法。The control device is installed on the vehicle body and configured to execute the control method as described above.
根据本发明的一个方面,所述自动引导车上不设置有调节所述抓取机构的角度的机构。According to one aspect of the present invention, the automatic guided vehicle is not provided with a mechanism for adjusting the angle of the grasping mechanism.
根据本发明的一个方面,所述自动引导车还包括侧视摄像头,所述侧视摄像头与所述控制装置耦合,从而所述控制装置根据所述侧视摄像头捕获的图像,计算所述抓取机构相对于所述物品的偏差。According to an aspect of the present invention, the automated guided vehicle further includes a side-view camera coupled to the control device, so that the control device calculates the capture based on the image captured by the side-view camera The deviation of the mechanism relative to the item.
本发明还涉及一种智能仓储系统,包括:The invention also relates to an intelligent storage system, including:
货架,所述货架上可放置料箱,所述料箱的侧部具有侧部标识符;A shelf on which a material box can be placed, and the side of the material box has a side identifier;
如上所述的自动引导车;The automatic guided vehicle as described above;
调度系统,所述调度系统与所述自动引导车通讯,并且可向所述自动引导车分配从所述货架上搬运料箱的任务。A dispatching system, the dispatching system communicates with the automatic guided vehicle, and the automatic guided vehicle can be assigned the task of transporting bins from the shelves.
本发明还涉及一种用于自动引导车的控制方法,所述自动引导车具有车体和设置在所述车体上的抓取机构,待放置目标位于所述抓取机构上,所述控制方法包括:The present invention also relates to a control method for an automatic guided vehicle. The automatic guided vehicle has a vehicle body and a grasping mechanism arranged on the vehicle body. The target to be placed is located on the grasping mechanism, and the control Methods include:
S301:控制所述自动引导车运动靠近放货位置;S301: Control the automatic guided vehicle to move closer to the delivery position;
S302:将所述抓取机构升高或降低到所述放货位置的高度;S302: Raise or lower the grabbing mechanism to the height of the delivery position;
S303:计算所述待放置目标相对于所述抓取机构在伸缩方向上的伸缩量偏差;S303: Calculate the telescopic deviation of the target to be placed relative to the grasping mechanism in the telescopic direction;
S304:根据所述待放置目标相对于所述抓取机构在伸缩方向上的伸缩量偏差,调整所述抓取机构的伸缩量;和S304: Adjust the amount of expansion and contraction of the grabbing mechanism according to the deviation of the amount of expansion and contraction of the object to be placed relative to the grabbing mechanism in the expansion and contraction direction; and
S305:将所述待放置目标放置于所述放货位置上。S305: Place the target to be placed on the delivery position.
根据本发明的一个方面,其中所述计算待放置目标相对于所述抓取机构在伸缩方向上的偏差的步骤包括:采集所述待搬运目标的底部标识符,并基于所述底部标识符的标定数据,计算待放置目标相对于所述抓取机构在伸缩方向上的偏差。According to an aspect of the present invention, the step of calculating the deviation of the object to be placed relative to the gripping mechanism in the telescopic direction comprises: collecting the bottom identifier of the object to be transported, and the calculation based on the bottom identifier The calibration data is used to calculate the deviation of the target to be placed relative to the gripping mechanism in the telescopic direction.
根据本发明的一个方面,所述的控制方法还包括:According to an aspect of the present invention, the control method further includes:
S306:计算所述抓取机构相对于所述放货位置的偏差,包括横向位移偏差和角度偏差中的一个或多个;S306: Calculate the deviation of the grabbing mechanism relative to the delivery position, including one or more of a lateral displacement deviation and an angular deviation;
S307:根据所述横向位移偏差和/或角度偏差,调整所述自动引导车的定位;S307: Adjust the positioning of the automatic guided vehicle according to the lateral displacement deviation and/or the angle deviation;
根据本发明的一个方面,所述步骤S307包括:使所述自动引导车相对于其竖直轴线的旋转所述角度偏差,使所述自动引导车平行于所述待搬运目标移动一定距离,所述一定距离补偿所述横向位移偏差以及旋转所述角度偏差带来的横向位移。According to one aspect of the present invention, the step S307 includes: making the angle deviation of the rotation of the automatic guided vehicle relative to its vertical axis, so that the automatic guided vehicle moves a certain distance parallel to the object to be transported, so The certain distance compensates for the lateral displacement deviation and the lateral displacement caused by rotating the angular deviation.
根据本发明的一个方面,所述控制方法还包括:当所述角度偏差大于角度偏差阈值,或所述横向位移偏差大于横向位移偏差阈值时,发出报警。According to an aspect of the present invention, the control method further includes: issuing an alarm when the angular deviation is greater than an angular deviation threshold, or the lateral displacement deviation is greater than a lateral displacement deviation threshold.
根据本发明的一个方面,所述控制方法还包括:所述控制方法还包括:当所述角度偏差小于或等于所述角度偏差阈值、且所述横向位移偏差小于或等于所述横向位移偏差阈值时,判断所述横向位移偏差是否大于横向位移偏差预定值;当所述横向位移偏差大于所述横向位移偏差预定值时,使所述自动引导车平行于所述待搬运目标移动移动以补偿所述横向位移偏差;否则,不补偿所述横向位移偏差。According to an aspect of the present invention, the control method further includes: the control method further includes: when the angle deviation is less than or equal to the angle deviation threshold, and the lateral displacement deviation is less than or equal to the lateral displacement deviation threshold When, determine whether the lateral displacement deviation is greater than the predetermined value of the lateral displacement deviation; when the lateral displacement deviation is greater than the predetermined value of the lateral displacement deviation, make the automatic guided vehicle move parallel to the object to be transported to compensate The lateral displacement deviation; otherwise, the lateral displacement deviation is not compensated.
根据本发明的一个方面,所述控制方法还包括:判断所述角度偏差是否小于所述角度偏差阈值并大于角度偏差设定值,According to an aspect of the present invention, the control method further includes: determining whether the angle deviation is less than the angle deviation threshold and greater than the angle deviation setting value,
如果所述角度偏差小于所述角度偏差阈值并大于角度偏差设定值,使所述自动引导车相对于其竖直轴线旋转以补偿所述角度偏差;否则,不补偿所述角度偏差。If the angle deviation is less than the angle deviation threshold and greater than the angle deviation setting value, the automatic guided vehicle is rotated relative to its vertical axis to compensate for the angle deviation; otherwise, the angle deviation is not compensated.
根据本发明的一个方面,所述步骤S304包括:According to an aspect of the present invention, the step S304 includes:
判断所述抓取机构的标准伸缩量与所述伸缩量偏差之和是否大于所述抓取机构的最大伸缩行程;Judging whether the sum of the standard telescopic amount of the grasping mechanism and the deviation of the telescopic amount is greater than the maximum telescopic stroke of the grasping mechanism;
如果大于所述最大伸缩行程,将所述抓取机构伸出所述最大伸缩行程;否则,按照所述抓取机构的标准伸缩量与所述伸缩量偏差之和,伸出所述抓取机构。If it is greater than the maximum telescopic stroke, extend the grasping mechanism out of the maximum telescopic stroke; otherwise, extend the grasping mechanism according to the sum of the standard telescopic amount of the grasping mechanism and the deviation of the telescopic amount .
根据本发明的一个方面,所述控制方法还包括:According to an aspect of the present invention, the control method further includes:
进行碰撞/限位检测,在未检测到碰撞/限位的情况下,放置所述货物并收回所述抓取机构;Carry out collision/limit detection, and if no collision/limit is detected, place the cargo and retract the grabbing mechanism;
根据所述横向位移偏差和/或角度偏差,恢复所述自动引导车的定位。According to the lateral displacement deviation and/or the angle deviation, the positioning of the automatic guided vehicle is restored.
本发明还涉及一种自动引导车,包括:The invention also relates to an automatic guided vehicle, including:
车体;Car body
电机,安装在所述车体上;The motor is installed on the vehicle body;
行进装置,安装在所述车体上并被所述电机驱动;Traveling device installed on the vehicle body and driven by the motor;
抓取机构,所述抓取机构设置在所述车体上,并可从货架上抓取物品并可将物品放置在货架上;A grasping mechanism, the grasping mechanism is arranged on the vehicle body, and can grab items from the shelf and place the items on the shelf;
控制装置,所述控制装置安装在所述车体上,并配置成可执行如上所述的控制方法。The control device is installed on the vehicle body and configured to execute the control method as described above.
根据本发明的一个方面,所述自动引导车上不设置有调节抓取机构的角度的机构。According to one aspect of the present invention, the automatic guided vehicle is not provided with a mechanism for adjusting the angle of the grasping mechanism.
本发明还涉及一种自动引导车,包括:The invention also relates to an automatic guided vehicle, including:
车体;Car body
电机,安装在所述车体上;The motor is installed on the vehicle body;
行进装置,安装在所述车体上并被所述电机驱动;Traveling device installed on the vehicle body and driven by the motor;
抓取机构,所述抓取机构设置在所述车体上,并可从货架上抓取物品并可将物品放置在货架上;A grasping mechanism, the grasping mechanism is arranged on the vehicle body, and can grab items from the shelf and place the items on the shelf;
侧视摄像头,设置在所述车体或抓取机构上,以拍摄所述自动引导车前方或侧方的图像;和A side-view camera, which is arranged on the vehicle body or the grasping mechanism to take images of the front or side of the automatic guided vehicle; and
上视摄像头,设置在所述车体或抓取机构上,以拍摄所述抓取机构上承载的物品底部的图像。The top-view camera is arranged on the vehicle body or the grasping mechanism to take an image of the bottom of the article carried on the grasping mechanism.
根据本发明的一个方面,所述的自动引导车还包括控制装置,所述控制装置与所述侧视摄像头和上视摄像头耦合,并配置成可执行如上所述的控制方法。According to one aspect of the present invention, the automated guided vehicle further includes a control device, which is coupled with the side-view camera and the top-view camera, and is configured to execute the control method described above.
根据本发明的一个方面,所述的自动引导车还包括升降装置,所述升降装置设置在所述抓取机构和所述车体之间,可升高或降低所述抓取机构,其中所述自动引导车上不设置有调节抓取机构的角度的机构。According to an aspect of the present invention, the automatic guided vehicle further includes a lifting device, which is arranged between the grasping mechanism and the vehicle body, and can raise or lower the grasping mechanism, wherein The automatic guided vehicle is not provided with a mechanism for adjusting the angle of the grasping mechanism.
本发明还涉及一种智能仓储系统,包括:The invention also relates to an intelligent storage system, including:
货架,所述货架上可放置料箱,所述货架上具有标识符;A shelf, on which a material box can be placed, and the shelf has an identifier;
如上所述的自动引导车;The automatic guided vehicle as described above;
调度系统,所述调度系统与所述自动引导车通讯,并且可向所述自动引导车分配从所述货架上搬运料箱的任务。A dispatching system, the dispatching system communicates with the automatic guided vehicle, and the automatic guided vehicle can be assigned the task of transporting bins from the shelves.
本发明涉及无人搬运机器人(Automated Guided Vehicle,简称AGV)末端视觉补偿控制技术领域,具体涉及一种将视觉传感器数据与运动控制像结合,构成视觉纠偏补偿控制的方法,尤其是一种用于智能料箱机器人采用视觉传感器对货架标识物进行识别并反馈补偿末端定位的控制方法。The present invention relates to the technical field of end vision compensation control of an unmanned transport robot (Automated Guided Vehicle, AGV for short), in particular to a method for combining vision sensor data with motion control images to form a visual correction compensation control, in particular to a method for The intelligent bin robot uses visual sensors to identify the shelf markers and feedback and compensate the control method of the end positioning.
构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:The drawings constituting a part of the present invention are used to provide a further understanding of the present invention. The exemplary embodiments of the present invention and the description thereof are used to explain the present invention, and do not constitute an improper limitation of the present invention. In the attached picture:
图1示出了使用自动引导车来搬运处理料箱的场景示意图;Figure 1 shows a schematic diagram of the scene of using an automated guided vehicle to transport and process the material box;
图2示出了货架和料箱的放大图;Figure 2 shows an enlarged view of the shelves and bins;
图3示出了抓取机构的放大图;Figure 3 shows an enlarged view of the grasping mechanism;
图4示出了抓取机构的俯视图;Figure 4 shows a top view of the grasping mechanism;
图5示出了根据本发明第一方面的一种用于自动引导车的控制方法;Figure 5 shows a control method for an automatic guided vehicle according to the first aspect of the present invention;
图6示出了根据本发明第一方面的坐标定义;Figure 6 shows the coordinate definition according to the first aspect of the present invention;
图7示意性示出了沿着运动方向从镜头中心到叉中心的距离;Figure 7 schematically shows the distance from the center of the lens to the center of the fork along the direction of movement;
图8示出了根据本发明一个优选实施例的自动引导车的控制方法;Figure 8 shows a control method of an automatic guided vehicle according to a preferred embodiment of the present invention;
图9示出了根据本发明第二方面的一种用于自动引导车的控制方法;Figure 9 shows a control method for an automatic guided vehicle according to the second aspect of the present invention;
图10示出了根据本发明第二方面的坐标系;和Figure 10 shows a coordinate system according to the second aspect of the present invention; and
图11示出了根据本发明的一个优选实施例的自动引导车的控制方法。Fig. 11 shows a control method of an automatic guided vehicle according to a preferred embodiment of the present invention.
在下文中,仅简单地描述了某些示例性实施例。正如本领域技术人员可认识到的那样,在不脱离本发明的精神或范围的情况下,可通过各种不同方式修改所描述的实施例。因此,附图和描述被认为本质上是示例性的而非限制性的。In the following, only certain exemplary embodiments are briefly described. As those skilled in the art can realize, the described embodiments may be modified in various different ways without departing from the spirit or scope of the present invention. Therefore, the drawings and description are to be regarded as illustrative in nature and not restrictive.
在本发明的描述中,需要理解的是,术语"中心"、"纵向"、"横向"、"长度"、"宽度"、"厚度"、"上"、"下"、"前"、"后"、"左"、"右"、"坚直"、"水平"、"顶"、"底"、"内"、"外"、"顺时针"、"逆时针"等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语"第一"、"第二"仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有"第一"、"第二"的特征可以明示或者隐含地包括一个或者更多个所述特征。在本发明的描述中,"多个"的含义是两个或两个以上,除非另有明确具体的限定。In the description of the present invention, it should be understood that the terms "center", "longitudinal", "lateral", "length", "width", "thickness", "upper", "lower", "front", " "Back", "Left", "Right", "Straight", "Horizontal", "Top", "Bottom", "Inner", "Outer", "Clockwise", "Counterclockwise" and other directions or The positional relationship is based on the position or positional relationship shown in the drawings, and is only for the convenience of describing the present invention and simplifying the description, and does not indicate or imply that the pointed device or element must have a specific orientation, be constructed and operated in a specific orientation, Therefore, it cannot be understood as a limitation to the present invention. In addition, the terms "first" and "second" are only used for descriptive purposes, and cannot be understood as indicating or implying relative importance or implicitly indicating the number of indicated technical features. Therefore, the features defined with "first" and "second" may explicitly or implicitly include one or more of the features. In the description of the present invention, "plurality" means two or more than two, unless otherwise specifically defined.
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语"安装"、"相连"、"连接"应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接:可以是机械连接,也可以是电连接或可以相互通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。In the description of the present invention, it should be noted that, unless otherwise clearly specified and limited, the terms "installation", "connection", and "connection" should be interpreted broadly. For example, they can be fixed or detachable. Connected or integrally connected: it can be mechanical connection, electrical connection or mutual communication; it can be directly connected or indirectly connected through an intermediate medium, it can be the internal communication of two components or the interaction of two components relationship. For those of ordinary skill in the art, the specific meaning of the above-mentioned terms in the present invention can be understood according to specific circumstances.
在本发明中,除非另有明确的规定和限定,第一特征在第二特征之"上"或之"下"可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征"之上"、"上方"和"上面"包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征"之下"、"下方"和"下面"包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度小于第二特征。In the present invention, unless otherwise clearly defined and defined, the first feature "on" or "under" the second feature may include the first and second features in direct contact, or may include the first and second features Not in direct contact but through other features between them. Moreover, the "above", "above", and "above" the first feature on the second feature includes the first feature directly above and diagonally above the second feature, or simply means that the first feature is higher in level than the second feature. The “below”, “below” and “below” of the first feature of the second feature include the first feature directly above and obliquely above the second feature, or only that the level of the first feature is smaller than the second feature.
下文的公开提供了许多不同的实施方式或例子用来实现本发明的不同结构。为了简化本发明的公开,下文中对特定例子的部件和设置进行描述。当然,它们仅仅为示例,并且目的不在于限制本发明。此外,本发明可以在不同例子中重复参考数字和/或参考字母,这种重复是为了简化和清楚的目的,其本身不指示所讨论各种实施方式和/ 或设置之间的关系。此外,本发明提供了的各种特定的工艺和材料的例子,但是本领域普通技术人员可以意识到其他工艺的应用和/或其他材料的使用。The following disclosure provides many different embodiments or examples for realizing different structures of the present invention. To simplify the disclosure of the present invention, the components and settings of specific examples are described below. Of course, they are only examples and are not intended to limit the invention. In addition, the present invention may repeat reference numerals and/or reference letters in different examples. Such repetition is for the purpose of simplification and clarity, and does not indicate the relationship between the various embodiments and/or settings discussed. In addition, the present invention provides examples of various specific processes and materials, but those of ordinary skill in the art may be aware of the application of other processes and/or the use of other materials.
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not used to limit the present invention.
图1示出了使用自动引导车来搬运处理料箱的场景示意图。如图1所示,自动引导车1包括车体(底盘)、车轮、抓取机构11等部件。其中车轮安装在车体上,可以被电机驱动,从而在地面上进行前进、后退、转弯、原地旋转(例如围绕其虚拟的纵向轴线旋转一定角度)等各种运动操作。Figure 1 shows a schematic diagram of a scenario where an automated guided vehicle is used to transport and process the bins. As shown in Fig. 1, the automated guided
图1中示意性示出了自动引导车1包括抓取机构11,例如是伸缩叉形式的抓取机构。自动引导车停靠在货架前方时,通过伸出或缩回伸缩叉,可以从货架上抓取料箱,或者可以将伸缩叉上的料箱放置到货架上。伸缩叉的具体结构在后文描述,在其他附图中示出。Fig. 1 schematically shows that the automated guided
另外,自动引导车1包括升降装置,可以升高或者降低该抓取机构11的高度,以适应不同高度的作业要求。如图1所示,自动引导车1在其底盘上方具有支架或者轨道,抓取机构11可以沿着该支架或者轨道上升或者下降。另外优选的,自动引导车1上不具有单独调整抓取机构11的角度的机构,因为本申请的发明人发现,调整抓取机构11的角度的机构会极大地提高系统控制的复杂性和难度。In addition, the automatic guided
图1中还示出了货架2。货架2例如是多行多列的货架,其上具有多个存储空间,可以放置多个料箱3。货架2上对应于每个存储空间,可以带有对应的货架标识符21,例如二维码或者定位码。从该二维码或定位码中可以获得该存储空间的相关信息。另外,通过扫描该二维码或者定位码,并进行相应的图像处理,可以获得摄像头相对于货架的定位,例如坐标以及角度定向等。The
在地面上具有地面定位标识4。地面定位标识4例如可以是二维码的形式,或者是磁条的形式,用于帮助自动引导车1的导航。例如,自动引导车1在接到调度控制器下发的搬运任务后,规划好搬运路径,然后沿着搬运路径运动。在行走过程中,自动引导车1上的摄像头拍摄地面的二维码,或者磁条感应装置感测地面的磁条,从而保证自动引导车1沿着正确的路径前进。此处不再赘述。根据本发明的一个优选的实施例,所述地面定位标识是不连续的,并且自动引导车的停靠位置只能位于地面标识符的上方,而不能位于地面标识符之间。例如图1中所示,自动引导车的中心停靠在其中一个地面定位标识符的上方。There is a
如图1所示,料箱3放置在货架2上,在料箱3上同样带有对应的侧部标识符31,其可以是二维码或定位码的形式,其中可编码有与料箱3相关的信息。另外,料箱3的底部也可以设置有底部标识符。后文详细描述。同样的,通过拍摄所述侧部标识符和底部标识符,并进行图像处理,可以获得摄像头或者摄像头的载体(例如自动引导车)相对于料箱的角度和/或位置。As shown in Figure 1, the
自动引导车1上可以设置有一个或多个摄像头,用于图像采集,例如采集货架上标识符、料箱上的侧部标识符、底部标识符等。通过图像处理,可以获得自动引导车的抓取机构相对于料箱/货架的相对定位以及料箱在抓取机构上的相对定位。One or more cameras may be provided on the automated guided
图2示出了货架2和料箱3的放大图。如图2所示,料箱3的下方具有托盘,以形成一个空隙31,伸缩叉可以插入该空隙31中,用于进行托举。图2中也示出了料箱侧部标识符31以及货架标识符21。FIG. 2 shows an enlarged view of the
图3和图4示出了抓取机构11的放大图,如图3所示,抓取机构11例如可以是伸缩叉的形式,可以朝着料箱的方向伸出(例如图4中向上的方向),也可以沿着远离料箱的方向回退(例如图4中向下的方向)。图3中还示出了自动引导车1上设置的侧部摄像头12以及上视摄像头13。侧部摄像头12和上视摄像头13例如均安装在抓取机构11的下方,其中侧部摄像头12朝向侧部,参考图1,可以用于拍摄料箱侧部的标识符31以及货架标识符21;上视摄像头13朝向上方,如图3所示,例如可以拍摄放置在抓取机构11上的料箱底部的标识符。Figures 3 and 4 show enlarged views of the grasping
相应的,自动引导车1上还具有控制单元或者图像处理装置(未示出),用于对各个摄像头所采集的图像进行处理,以获取图像中的信息,例如标识符或者二维码中所编码的信息,并且可以获得抓取机构相对于料箱的相对定位信息(比如相对高度信息、沿着左右方向的位移偏差信息以及相对角度偏差信息等)。Correspondingly, the automatic guided
以下简单描述自动引导车1的工作过程。以搬取料箱为例,自动引导车1首先接到搬运任务,在地面定位标识4的引导下,到达合适的货架2前方。随后,自动引导车1通过其升降装置,改变抓取机构11的高度,使其定位到与待抓取料箱相同的高度处,然后通过电机驱动抓取机构11,使得驱动装置向外延伸,伸入到料箱托盘下方的间隙中,然后托起料箱托盘,向后回退,完成料箱的抓取操作。The working process of the automatic guided
下面参考图5详细描述根据本发明第一方面的一种用于自动引导车的控制方法100。其中所述自动引导车例如如上描述的自动引导车1,具有车体和设置在所述车体上的抓取机构11。如图5所示,所述控制方法包括:Hereinafter, a
在步骤S101,控制所述自动引导车运动靠近待搬运目标。In step S101, the automatic guided vehicle is controlled to move close to the object to be transported.
如上所述,自动引导车11例如从上游的调度单元接到搬运任务,搬运任务例如涉及一个具体的料箱,自动引导车11获知该料箱的存放位置,例如位于哪一个货架上。之后,自动引导车11在地面定位标识4的引导下,靠近该货架,例如定位在该料箱的前面。As described above, the automated guided
在步骤S102,将所述抓取机构升高或降低到所述待搬运目标的高度。In step S102, the grasping mechanism is raised or lowered to the height of the object to be conveyed.
自动引导车11根据料箱的搬运任务,可以获知该料箱的高度,例如存放在货架的哪一层上,从而计算出其高度。根据一个实施例,搬运任务中本身可包括料箱存放的高度信息。根据另一种实现方式,自动引导车接到搬运任务后,可以在数据库中查询该料箱的存放在货架的哪一层上,从而可以获知该料箱的高度,然后可以控制抓取机构升高或者降低到该料箱的高度上。The automatic guided
在步骤S103,计算所述抓取机构相对于所述待搬运目标的偏差,所述偏差包括横向位移偏差和角度偏差中的一个或多个。In step S103, the deviation of the grasping mechanism relative to the object to be conveyed is calculated, and the deviation includes one or more of a lateral displacement deviation and an angular deviation.
虽然在步骤S101和S102中将自动引导车定位到料箱的前方、并且将抓取机构定位到料箱的高度上,但是,由于自动引导车的现场定位控制精度可能无法保证足够高的精度,因此在步骤S101和S102之后,还需要获得自动引导车或者抓取机构相对于 待搬运料箱的偏差,并进行相应的调整,才能够进一步提高定位精度。否则,抓取料箱时,抓取机构可能无法准确地执行操作。例如图2中示出的料箱3下方的空隙,是供伸缩叉式的抓取机构插入的,该空隙的左右方向的尺寸与伸缩叉的宽度大致相同,因此如果伸缩叉没有与该空隙对准,例如左右方向具有一定的偏差,或者角度方向存在一定的偏差(例如偏离90度较大),那么在抓取过程中很可能会发生干涉或者碰撞,造成无法正常抓取料箱。Although in steps S101 and S102, the automatic guided vehicle is positioned in front of the material box and the grasping mechanism is positioned at the height of the material box, due to the on-site positioning control accuracy of the automatic guided vehicle, a sufficiently high accuracy may not be guaranteed. Therefore, after steps S101 and S102, it is also necessary to obtain the deviation of the automatic guided vehicle or the grasping mechanism relative to the to-be-carried material box and make corresponding adjustments to further improve the positioning accuracy. Otherwise, the gripping mechanism may not be able to perform operations accurately when gripping the bin. For example, the gap below the
常见的偏差主要有横向位移方向的偏差和角度偏差。以图1为例进行说明,横向位移方向是指自动引导车移动的方向,即图1中的左右方向。横向方向的偏差可能会由于自动引导车停靠时的位置偏差所引起,也可能由于料箱在货架上摆放的位置偏差所引起,这二者都可能会造成自动引导车与料箱没有处于一个理想的相对位置上。角度偏差是指抓取机构相对于料箱在水平方向内的角度的偏差。以伸缩叉式的抓取机构为例,理想的情况下,伸缩叉应当垂直于料箱,从而垂直的插入料箱下部的空隙中,完成抓取操作。但是在实际情况中,由于自动引导车的角度定向偏差,或者由于料箱的摆放定向的偏差,都可能造成伸缩叉与该空隙(或料箱)之间的角度并非90度,例如是88度。这样情况下,就需要对二者之间的角度进行计算和调整。否则,托盘在插入料箱下部空间的过程中可能发生干涉或者碰撞,造成无法进行抓取操作。The common deviations mainly include the deviation of the lateral displacement direction and the angle deviation. Taking FIG. 1 as an example for description, the lateral displacement direction refers to the direction in which the automatic guided vehicle moves, that is, the left and right directions in FIG. 1. The deviation in the lateral direction may be caused by the position deviation of the automatic guided vehicle when it is parked, or it may be caused by the position deviation of the material box placed on the shelf. Both of these may cause the automatic guided vehicle and the material box to not be in the same position. Ideal relative position. Angle deviation refers to the deviation of the angle of the gripping mechanism relative to the bin in the horizontal direction. Take the telescopic fork-type grasping mechanism as an example. Ideally, the telescopic fork should be perpendicular to the material box so as to be vertically inserted into the gap in the lower part of the material box to complete the grasping operation. However, in actual situations, due to the deviation of the angle orientation of the automatic guided vehicle or the deviation of the orientation of the material box, the angle between the telescopic fork and the gap (or material box) may not be 90 degrees, for example, 88 degree. In this case, the angle between the two needs to be calculated and adjusted. Otherwise, the tray may interfere or collide during the process of inserting into the lower space of the material box, making it impossible to carry out the grasping operation.
在步骤S104,根据所述横向位移偏差和/或角度偏差,调整所述自动引导车的定位。In step S104, the positioning of the automatic guided vehicle is adjusted according to the lateral displacement deviation and/or the angle deviation.
在步骤S103中获得了抓取机构相对于所述待搬运目标的偏差之后,根据所述偏差,调整自动引导车的定位,例如使得自动引导车(反向)移动该横向位移偏差的量,从而消除横向位移偏差;使得自动引导车(反向)旋转该角度偏差的量,从而消除角度偏差。After the deviation of the grasping mechanism relative to the object to be conveyed is obtained in step S103, the positioning of the automatic guided vehicle is adjusted according to the deviation, for example, the automatic guided vehicle (reversely) moves by the amount of the lateral displacement deviation, thereby Eliminate the lateral displacement deviation; make the automatic guided vehicle (reverse) rotate the amount of the angular deviation, thereby eliminating the angular deviation.
本发明中,可通过调整自动引导车的位置来使得抓取机构对准料箱,而无需单独地调整抓取机构的定位。因而无需增加抓取机构的旋转轴以及抓取机构的旋转驱动机构,降低了控制维度和难度,使用范围更广。In the present invention, the position of the automatic guided vehicle can be adjusted to make the grasping mechanism align with the material box, without the need to separately adjust the positioning of the grasping mechanism. Therefore, there is no need to increase the rotation axis of the grabbing mechanism and the rotation driving mechanism of the grabbing mechanism, which reduces the control dimension and difficulty and has a wider application range.
在步骤S105,抓取所述待搬运目标。In step S105, grab the object to be transported.
在消除或者减小了所述偏差后,通过所述抓取机构,抓取料箱。此时由于抓取机构相对于所述待搬运目标的偏差被消除或者被减小到允许的范围内,抓取操作可以更顺利的进行,不会产生干涉或者误操作。After eliminating or reducing the deviation, the material box is grasped by the grasping mechanism. At this time, since the deviation of the grasping mechanism relative to the object to be conveyed is eliminated or reduced to an allowable range, the grasping operation can be carried out more smoothly without interference or misoperation.
根据本发明的一个优选实施例,所述偏差包括横向位移偏差、角度偏差和高度偏差。在这种情况下,所述方法100还包括根据所述高度偏差调整所述抓取机构的高度。According to a preferred embodiment of the present invention, the deviation includes lateral displacement deviation, angular deviation and height deviation. In this case, the
根据本发明的一个优选实施例,在步骤S103,通过以下方式来计算所述抓取机构相对于所述待搬运目标的偏差(所述偏差包括横向位移偏差和角度偏差):采集所述待搬运目标的侧部标识符,并基于所述侧部标识符的标定数据,计算所述偏差。以下具体描述。According to a preferred embodiment of the present invention, in step S103, the deviation of the grasping mechanism relative to the object to be transported is calculated in the following manner (the deviation includes a lateral displacement deviation and an angular deviation): collecting the to-be transported The side identifier of the target, and the deviation is calculated based on the calibration data of the side identifier. This is described in detail below.
在将自动引导车定位到目标料箱的前方、并且将抓取机构定位到目标料箱的高度之后,通过自动引导车1的侧视摄像头12,拍摄料箱的侧部标识符31(例如二维码)。自动引导车的控制单元或者图像处理单元对图片进行解码和相应的处理,得到当前待抓取的料箱的高度信息x,车身运动方向信息y,摄像头到标识物的深度信息z,以及目 标和车身的夹角信息θ,坐标定义如图6所示(其中YZ平面为水平面,Y方向为自动引导车移动方向,X方向为竖直方向)。举例来说,料箱的侧部标识符中除了编码信息,例如还有三个定位小黑块,对侧部标识符进行拍照,例如通过这三个定位小黑块,通过图像处理算法(例如透视变换算法),可以获得xyzθ这四个参数。这里不再赘述如何通过图像处理算法来获得这些参数。After the automatic guided vehicle is positioned in front of the target bin and the gripping mechanism is positioned to the height of the target bin, the side-
将解算出来图像数据,与标识符的标定数据进行计算,得到抓取目标的偏差数据,计算方式如公式(1),其中x,y,θ为解算图像的数据,xb,yb,θb为标定图像的数据,Δx,Δy,Δθ为偏差数据(分别为高度偏差、横向位移偏差和角度偏差)。The calculated image data is calculated with the calibration data of the identifier to obtain the deviation data of the captured target. The calculation method is as shown in formula (1), where x, y, θ are the data of the calculated image, xb , yb , Θb is the data of the calibration image, Δx, Δy, Δθ are the deviation data (respectively the height deviation, the lateral displacement deviation and the angle deviation).

之后,通过将自动引导车相对于其竖直轴线旋转所述角度偏差,沿着平行于待搬运目标移动所述横向位移偏差,来消除所述角度偏差和横向位移偏差。Afterwards, by rotating the automatic guided vehicle relative to its vertical axis by the angular deviation, and moving the lateral displacement deviation parallel to the object to be conveyed, the angular deviation and the lateral displacement deviation are eliminated.
另外,由于角度旋转会带来抓取机构的位移,所以根据本发明的一个优选实施例,可以将旋转带来的横向位移补偿,计算如下:In addition, since angular rotation will bring about displacement of the grasping mechanism, according to a preferred embodiment of the present invention, the lateral displacement caused by rotation can be compensated as follows:
Δyθ(z-d)*tanθ+Δy (2)Δyθ (zd)*tanθ+Δy (2)
其中,Δyθ为含有角度偏差的运动方向偏差补偿量,z为标识符中心到镜头中心的深度,d为沿着运动方向从镜头中心到伸缩叉中心的距离(如图7所示),θ为末端定位算法计算出的夹角。这样的话,Δyθ能够补偿所述横向位移偏差以及旋转所述角度偏差带来的横向位移。Among them, Δyθ is the movement direction deviation compensation amount including the angular deviation, z is the depth from the center of the identifier to the center of the lens, d is the distance from the center of the lens to the center of the telescopic fork along the direction of movement (as shown in Figure 7), θ The angle calculated by the end positioning algorithm. In this way, Δyθ can compensate for the lateral displacement deviation and the lateral displacement caused by rotating the angular deviation.
对于运动方向的偏差(横向位移偏差)和角度方向的偏差(角度偏差),通过在当前停靠位置进行相对运动补偿,即将自动引导车本体移动和旋转对应的补偿信息Δyθ和Δθ,最终实现整体偏差量的补偿调整,完成准确抓取。使所述自动引导车相对于其竖直轴线的旋转所述角度偏差,使所述自动引导车平行于所述待搬运目标移动一定距离,所述一定距离补偿所述横向位移偏差以及旋转所述角度偏差带来的横向位移。For the deviation of the movement direction (lateral displacement deviation) and the deviation of the angular direction (angle deviation), the compensation information Δyθ and Δθ corresponding to the movement and rotation of the car body will be automatically guided by the relative motion compensation at the current parking position, and finally the overall Compensation adjustment of deviation, complete accurate capture. The angle deviation of the rotation of the automatic guided vehicle relative to its vertical axis is caused to move the automatic guided vehicle parallel to the object to be transported a certain distance, and the certain distance compensates for the lateral displacement deviation and rotates the Lateral displacement caused by angular deviation.
高度信息的补偿采用绝对位置控制方式,在竖直方向上移动抓取机构进行校准。绝对位置控制及相对与运动零点的绝对高度信息,计算如下;The compensation of the height information adopts the absolute position control method, and the gripping mechanism is moved in the vertical direction for calibration. Absolute position control and absolute height information of relative and motion zero points are calculated as follows;
xc=x+Δx (3)xc =x+Δx (3)
其中x为抓取机构当前绝对位置高度,Δx为末端定位算法计算标识物高度补偿量,xc为补偿后抓取机构绝对位置高度。Where x is the current absolute position height of the grasping mechanism, Δx is the compensation amount of the marker height calculated by the end positioning algorithm, and xc is the absolute position height of the grasping mechanism after compensation.
图8示出了根据本发明一个优选实施例的方法200。下面参考图8详细描述。Fig. 8 shows a
方法200中的步骤S201、S202、S203,分别与方法100中的步骤S101、S102、S103相同,此处不再赘述。Steps S201, S202, and S203 in the
如图8所示,在步骤S203中计算出横向位移偏差和/或角度偏差之后,在步骤S204,判断该角度偏差是否大于角度偏差阈值,角度偏差阈值例如为3.5度。当角度偏差大于该阈值时,进行到步骤S205,发出角度偏差过大的报错提示,表明自动引导车的引导和控制出现了故障,需要工作人员介入。否则,进行到步骤S206,判断横向位移偏差是否大于横向位移偏差阈值,例如37mm。当横向位移偏差大于该阈值时,进行到步骤S207,发出横向位移偏差过大的报错提示,表明系统出现故障。否则,进行到步骤 S208,判断高度偏差是否大于阈值,例如5mm。如果高度偏差大于该阈值,进行到步骤S209,提高或者降低抓取机构的高度进行补偿。否则,进行到步骤S210,判断横向位移偏差是否大于预设值(例如3mm)同时小于上述阈值(例如37mm),如果是,那么进行到步骤S211,进行横向移动补偿。否则,进行到步骤S212,判断角度偏差是否大于等于预设值而小于上述阈值,如果是,则进行自动引导车的角度旋转以补偿该角度偏差,例如在码上通过自动引导车底盘电机差动微调旋转,调整自动引导车的角度以补偿纠偏到合适角度;否则,可以不调整该角度偏差。优选的,在步骤S211进行的左右移动补偿,补偿了所述横向位移偏差以及旋转所述角度偏差带来的横向位移,同时优选的将步骤S210和S211放置到步骤S212和S213的下游。As shown in FIG. 8, after the lateral displacement deviation and/or the angle deviation are calculated in step S203, in step S204, it is determined whether the angle deviation is greater than the angle deviation threshold, the angle deviation threshold is 3.5 degrees, for example. When the angle deviation is greater than the threshold, the process proceeds to step S205, and an error message indicating that the angle deviation is too large is issued, indicating that there is a failure in the guidance and control of the automatic guided vehicle and the intervention of the staff is required. Otherwise, proceed to step S206 to determine whether the lateral displacement deviation is greater than the lateral displacement deviation threshold, for example, 37 mm. When the lateral displacement deviation is greater than the threshold, proceed to step S207, and issue an error message indicating that the lateral displacement deviation is too large, indicating that the system is malfunctioning. Otherwise, proceed to step S208 to determine whether the height deviation is greater than the threshold, for example, 5 mm. If the height deviation is greater than the threshold, proceed to step S209 to increase or decrease the height of the grasping mechanism for compensation. Otherwise, proceed to step S210 to determine whether the lateral displacement deviation is greater than a preset value (for example, 3 mm) and smaller than the aforementioned threshold value (for example, 37 mm), if yes, then proceed to step S211 to perform lateral motion compensation. Otherwise, proceed to step S212 to determine whether the angle deviation is greater than or equal to the preset value but less than the above-mentioned threshold. If yes, perform the angle rotation of the automatic guided vehicle to compensate for the angular deviation, for example, use the automatic guided vehicle chassis motor differential on the code Fine-tune the rotation and adjust the angle of the automatic guided vehicle to compensate the correction to a suitable angle; otherwise, the angle deviation may not be adjusted. Preferably, the left and right movement compensation performed in step S211 compensates for the lateral displacement deviation and the lateral displacement caused by rotating the angle deviation, and at the same time, steps S210 and S211 are preferably placed downstream of steps S212 and S213.
补偿调整操作结束之后,进行到步骤S214,伸缩叉伸出,然后进行步骤S215的碰撞/限位检测,如果检测到碰撞/限位,那么在步骤S216,发出碰撞/限位报错,否则,在步骤S217,伸缩叉收回,表明完成货物抓取,之后先挪动角度到初始角度再恢复相对位置到停靠时的位置,即恢复到步骤S201结束后的自动引导车的位置上。具体包括:在步骤S218,角度回正,在步骤S219,左右方向回到地面定位标识码中心,动作结束,自动引导车准备好行进到下一个目标点。After the compensation adjustment operation is over, proceed to step S214, extend the telescopic fork, and then perform the collision/limit detection of step S215. If a collision/limit is detected, then in step S216, a collision/limit error is issued, otherwise, In step S217, the telescopic fork is retracted, which indicates that the cargo grabbing is completed, and then the angle is first moved to the initial angle and then the relative position is restored to the parked position, that is, to the position of the automated guided vehicle after the end of step S201. Specifically, it includes: in step S218, the angle is returned to the right, in step S219, the left and right directions return to the center of the ground positioning identification code, the action ends, and the automatic guided vehicle is ready to travel to the next target point.
根据上述实施例,当所述角度偏差大于角度偏差阈值,或所述横向位移偏差大于横向位移偏差阈值时,发出报错。According to the above embodiment, when the angular deviation is greater than the angular deviation threshold, or the lateral displacement deviation is greater than the lateral displacement deviation threshold, an error is issued.
根据上述实施例,当所述角度偏差小于或等于所述角度偏差阈值、且所述横向位移偏差小于或等于所述横向位移偏差阈值时,判断所述横向位移偏差是否大于横向位移偏差预定值;当所述横向位移偏差大于所述横向位移偏差预定值时,使所述自动引导车平行于所述待搬运目标移动移动以补偿所述横向位移偏差;否则,不补偿所述横向位移偏差。According to the above embodiment, when the angular deviation is less than or equal to the angular deviation threshold and the lateral displacement deviation is less than or equal to the lateral displacement deviation threshold, it is determined whether the lateral displacement deviation is greater than a predetermined value of the lateral displacement deviation; When the lateral displacement deviation is greater than the predetermined value of the lateral displacement deviation, the automatic guided vehicle is moved parallel to the object to be transported to compensate for the lateral displacement deviation; otherwise, the lateral displacement deviation is not compensated.
根据上述实施例,判断所述角度偏差是否小于所述角度偏差阈值并大于角度偏差设定值,如果所述角度偏差小于所述角度偏差阈值并大于角度偏差设定值,使所述自动引导车相对于其竖直轴线旋转以补偿所述角度偏差;否则,不补偿所述角度偏差。According to the above embodiment, it is determined whether the angle deviation is less than the angle deviation threshold and greater than the angle deviation setting value, and if the angle deviation is less than the angle deviation threshold value and greater than the angle deviation setting value, the automatic guided vehicle Rotate relative to its vertical axis to compensate for the angular deviation; otherwise, the angular deviation is not compensated.
根据上述实施例,所述抓取待搬运目标的步骤包括:伸出所述抓取机构至所述待搬运目标;进行碰撞/限位检测,在未检测到碰撞/限位的情况下,获取所述待搬运目标并收回所述抓取机构;根据所述横向位移偏差和/或角度偏差,恢复所述自动引导车的定位。According to the above embodiment, the step of grabbing the object to be transported includes: extending the grabbing mechanism to the object to be transported; performing collision/limit detection, and in the case of no collision/limit detection, acquiring The target to be transported and the grabbing mechanism are retracted; and the positioning of the automatic guided vehicle is restored according to the lateral displacement deviation and/or the angle deviation.
图9示出了根据本发明一个实施例的一种用于自动引导车的控制方法300。所述自动引导车具有车体和设置在所述车体上的抓取机构,待放置目标位于所述抓取机构上,例如上面参考图1-4描述的自动引导车1。控制方法300例如用于向货架上放置料箱,料箱的底部具有底部标识符,类似于上文描述的侧部标识符31。下面参考图9描述。Fig. 9 shows a
如图9所示,所述控制方法包括:As shown in Figure 9, the control method includes:
在步骤S301,控制所述自动引导车运动靠近放货位置。In step S301, the automatic guided vehicle is controlled to move closer to the delivery position.
如上所述,自动引导车11接到一个放置料箱的搬运任务,并获知了该料箱的目标存放位置,例如位于哪一个货架上。之后,自动引导车11在地面定位标识4的引导下,搬运者料箱运动靠近该货架,例如定位在该目标存放位置的前面。As described above, the automated guided
在步骤S302,将所述抓取机构升高或降低到所述放货位置的高度。In step S302, the grabbing mechanism is raised or lowered to the height of the delivery position.
在步骤S303,计算所述待放置目标相对于所述抓取机构在伸缩方向上的偏差。In step S303, the deviation in the telescopic direction of the target to be placed relative to the grasping mechanism is calculated.
自动引导车例如可以通过其上视摄像头,拍摄位于抓取机构上的料箱底部的标识码,并通过解码获得的信息与标定数据进行比较,从而获得料箱相对于抓取机构在伸缩方向上的偏差。下文将详细描述。The automatic guided vehicle can, for example, use its top-view camera to photograph the identification code at the bottom of the bin on the gripping mechanism, and compare the information obtained by decoding with the calibration data, so as to obtain the telescopic direction of the bin relative to the gripping mechanism The deviation. This will be described in detail below.
在步骤S304,根据所述待放置目标相对于所述抓取机构在伸缩方向上的偏差,调整所述抓取机构的伸缩量。In step S304, the amount of expansion and contraction of the grabbing mechanism is adjusted according to the deviation of the object to be placed in the expansion and contraction direction relative to the grabbing mechanism.
在步骤S305,将所述待放置目标放置于所述放货位置上。In step S305, the target to be placed is placed on the delivery position.
下面描述步骤S303实现的一个优选实施例。A preferred embodiment implemented in step S303 is described below.
在步骤S301和S302,自动引导车移动到接近放货位置的停靠位,并将抓取机构升高至待放置目标的放货位置。此时,例如通过上文描述的自动引导车的上视摄像头13,自下而上获取抓取机构上方货物位置情况。In steps S301 and S302, the automatic guided vehicle moves to a parking position close to the delivery position, and raises the grabbing mechanism to the delivery position of the target to be placed. At this time, for example, the upper-
料箱的底部标识符与上文描述的侧部标识符类似,其中除了编码信息,例如还有三个定位小黑块,对底部标识符进行拍照,例如通过这三个定位小黑块,通过图像处理算法(例如透视变换算法),可以获得相应的位置参数。这里不再赘述如何通过图像处理算法来获得这些参数。本领域普通技术人员将熟知如何实现。The bottom identifier of the bin is similar to the side identifier described above. In addition to the coding information, for example, there are three small positioning black blocks. The bottom identifier is photographed. For example, through these three small positioning black blocks, through the image Processing algorithms (such as perspective transformation algorithms) can obtain the corresponding position parameters. I will not repeat how to obtain these parameters through image processing algorithms. Those of ordinary skill in the art will know how to do this.
料箱在抓取机构上的坐标系如图10所示,其中XY平面为水平面,Y轴为自动引导车的运动方向,Z轴为竖直方向。通过自下而上拍摄料箱,或者拍摄料箱底部的标识符,可以获得料箱相对于所述伸缩叉式抓取机构在伸缩方向上的偏差。例如采集所述待搬运目标的底部的标识符,在控制单元或者图像处理装置中,基于所述底部标识符的标定数据,计算待放置目标相对于所述抓取机构在伸缩方向上的偏差。以下详细描述。The coordinate system of the material box on the grasping mechanism is shown in Figure 10, where the XY plane is the horizontal plane, the Y axis is the movement direction of the automatic guided vehicle, and the Z axis is the vertical direction. By photographing the material box from bottom to top or the identifier at the bottom of the material box, the deviation of the material box in the telescopic direction relative to the telescopic fork gripping mechanism can be obtained. For example, the identifier of the bottom of the object to be transported is collected, and the deviation of the object to be placed in the telescopic direction relative to the grasping mechanism is calculated based on the calibration data of the bottom identifier in the control unit or the image processing device. This is described in detail below.
yu是车身运动方向上料箱中心与叉臂中心点的偏差信息,xu是料箱中心与叉臂中心在抓取机构伸缩方向上的信息,θu是货物相对车身偏移角度信息,zu是二维码到镜头的深度信息。通过拍摄所述底部标识符并进行图像处理,可解算出上述四个参数。根据本发明的一个优选实施例,在上视检测时主要使用抓取机构伸缩方向的信息xu,用于纠正到货架上的摆放伸缩位置。同理,将上视摄像头获取的底部标识符的标识信息与该底部标识符的标定信息(标定数据)比对后,得到待补偿的伸缩量偏差信息如下:yu is the deviation information between the center of the material box and the center of the fork arm in the direction of the body movement, xu is the information of the center of the material box and the center of the fork arm in the telescopic direction of the gripping mechanism, and θu is the information about the deviation angle of the cargo relative to the body. zu is the depth information from the QR code to the lens. By photographing the bottom identifier and performing image processing, the above four parameters can be calculated. According to a preferred embodiment of the present invention, the information xu of the telescopic direction of the grabbing mechanism is mainly used in the top view detection, which is used to correct the telescopic position on the shelf. In the same way, after comparing the identification information of the bottom identifier obtained by the top-view camera with the calibration information (calibration data) of the bottom identifier, the deviation information of the amount of expansion and contraction to be compensated is as follows:
xu-xb=Δxu (4)xu -xb =Δxu (4)
其中xb是标定好的料箱中心与叉臂中心在抓取机构伸缩方向上的信息,Δxu是待补偿的伸缩量偏差信息。Where xb is the information of the calibrated bin center and the center of the fork arm in the telescopic direction of the gripping mechanism, and Δxu is the deviation information of the telescopic amount to be compensated.
在步骤S304中,根据所述待放置目标相对于所述抓取机构在伸缩方向上的偏差,调整所述抓取机构的伸缩量。In step S304, the amount of expansion and contraction of the grabbing mechanism is adjusted according to the deviation of the object to be placed in the expansion and contraction direction relative to the grabbing mechanism.
举例说明。假定伸缩叉的标准伸缩量为100,即在理想状况下,伸缩叉在放货/取货时,伸缩叉伸出/回缩的距离为100。如果料箱在伸缩叉上的位置偏离了理想位置(即对应于底部标识符的标定数据),那么伸缩叉的伸缩量就需要调整。例如当料箱相对于理想位置更加靠外时,即更靠近伸缩叉的边缘,更靠近货架,这种情况下,伸缩叉的伸缩量就无需保持100,而是可以调整为100减去上述的伸缩量偏差。相反,当料箱相对于理想位置更加靠内,即更远离伸缩叉的边缘,更远离货架,这种情况下,伸缩叉 的伸缩量就无需保持100,而是可以调整为100加上上述的伸缩量偏差,即伸缩叉需要伸出更大的距离。for example. Assuming that the standard telescopic amount of the telescopic fork is 100, that is, under ideal conditions, the telescopic fork extends/retracts at a distance of 100 when the telescopic fork is placed or picked up. If the position of the material box on the telescopic fork deviates from the ideal position (that is, the calibration data corresponding to the bottom identifier), then the telescopic fork needs to be adjusted. For example, when the material box is more outside relative to the ideal position, that is, closer to the edge of the telescopic fork, and closer to the shelf, in this case, the telescopic fork does not need to maintain 100, but can be adjusted to 100 minus the above The amount of expansion deviation. On the contrary, when the material box is more inward relative to the ideal position, that is, farther away from the edge of the telescopic fork, farther away from the shelf, in this case, the telescopic fork does not need to maintain 100, but can be adjusted to 100 plus the above The deviation of the telescopic amount means that the telescopic fork needs to extend a greater distance.
根据本发明的一个优选实施方式,还包括计算所述抓取机构相对于所述放货位置的偏差,包括横向位移偏差和角度偏差中的一个或多个;根据所述横向位移偏差和角度偏差,调整所述自动引导车的定位。According to a preferred embodiment of the present invention, it further includes calculating the deviation of the grasping mechanism relative to the delivery position, including one or more of the lateral displacement deviation and the angular deviation; according to the lateral displacement deviation and the angular deviation , Adjust the positioning of the automated guided vehicle.
计算抓取机构相对于放货位置的偏差,例如横向位移偏差和角度偏差,可以采用本发明的实施例的方法100/200中的方法,所不同的就是采用货架标识符21,而非料箱侧部标识符31。相应的,采用的是货架标识符21的标定数据信息。此处不再赘述。To calculate the deviation of the gripping mechanism relative to the delivery position, such as the lateral displacement deviation and the angular deviation, the method in the
根据本发明的一个优选实施例,所述调整自动引导车的定位的步骤包括:使所述自动引导车相对于其竖直轴线的旋转所述角度偏差,使所述自动引导车平行于所述待搬运目标移动一定距离,所述一定距离补偿所述横向位移偏差以及旋转所述角度偏差带来的横向位移。According to a preferred embodiment of the present invention, the step of adjusting the positioning of the automated guided vehicle includes: making the angle deviation of the rotation of the automated guided vehicle relative to its vertical axis so that the automated guided vehicle is parallel to the The object to be transported moves a certain distance, and the certain distance compensates for the lateral displacement deviation and the lateral displacement caused by the rotation of the angular deviation.
下面参考图11描述根据本发明的一个优选实施例的方法400。The
在步骤S401,控制自动引导车靠近放货位置,例如通过地面定位标识符,停靠在目标货架前方。待放货的料箱此时位于自动引导车的抓取机构上。In step S401, the automated guided vehicle is controlled to approach the delivery position, for example, to park in front of the target shelf through the ground positioning identifier. The material box to be placed is now located on the grabbing mechanism of the automatic guided vehicle.
在步骤S402,将抓取机构升高或者降低到放货位置的高度。此处不再赘述。In step S402, the gripping mechanism is raised or lowered to the height of the delivery position. I won't repeat them here.
在步骤S401和S402中已经做好了放货的初步准备,但是由于料箱在抓取机构(例如伸缩叉)上的位置,与理想的位置之间可能具有一定的偏离(例如,料箱此时过于靠近伸缩叉的边缘/过于靠近货架,或者料箱此时过于远离伸缩叉的边缘/过于远离货架),或者自动引导车相对于货架的位置以及角度,相对于理想放货的位置和角度,具有一定的偏差(横向位移偏差和角度偏差),需要对伸缩叉的伸缩量进行修正,对自动引导车的位置和角度定向进行修正,才能够保证顺利地将料箱放置到货架上。In steps S401 and S402, preliminary preparations have been made for placing the goods, but due to the position of the material box on the grasping mechanism (for example, telescopic fork), there may be a certain deviation from the ideal position (for example, the material box is here). Too close to the edge of the telescopic fork/too close to the shelf, or the bin is too far away from the edge of the telescopic fork/too far away from the shelf), or the position and angle of the automatic guided vehicle relative to the shelf, relative to the ideal position and angle of the goods , With a certain deviation (lateral displacement deviation and angle deviation), the telescopic fork needs to be corrected, and the position and angle orientation of the automatic guided vehicle must be corrected to ensure the smooth placement of the bin on the shelf.
在步骤S403,计算待放置的料箱相对于抓取机构在伸缩方向上的偏差,计算抓取机构相对于放货位置的偏差。In step S403, the deviation of the to-be-placed material box relative to the gripping mechanism in the telescopic direction is calculated, and the deviation of the gripping mechanism relative to the delivery position is calculated.
其中,计算待放置的料箱相对于抓取机构在伸缩方向上的偏差,可以通过上视摄像头拍摄料箱的底部标识符,通过图像处理,获得底部标识符的标识信息,与该底部标识符的标定信息(标定数据)比对后,得到待补偿的伸缩量偏差信息。此处不再赘述。Among them, to calculate the deviation of the to-be-placed material box relative to the gripping mechanism in the telescopic direction, the bottom identifier of the material box can be photographed by the top-view camera, and the identification information of the bottom identifier can be obtained through image processing. After the calibration information (calibration data) is compared, the deviation information of the expansion and contraction amount to be compensated is obtained. I won't repeat them here.
计算抓取机构相对于放货位置的偏差,可以通过侧视摄像头拍摄货架标识符21,并进行图像处理,获得该货架标识符的标识信息,与该货架标识符的标定信息(标定数据)比对后,得到抓取机构相对于放货位置的偏差,例如横向位移偏差和角度偏差。可以采用本发明的实施例的方法100/200中的方法,所不同的就是采用货架标识21,而非料箱标识31。此处不再赘述。Calculate the deviation of the grabbing mechanism relative to the delivery position. The
在步骤S404,判断角度偏差是否大于角度偏差阈值,阈值例如为3.5度。当角度大于该阈值时,进行到步骤S405,发出角度偏差过大的报错提示,提醒管理人员介入。否则,进行到步骤S406,判断横向位移偏差是否大于横向位移偏差阈值,例如37mm。当横向位移偏差大于该阈值时,进行到步骤S407,发出横向位移偏差过大的报错提示,提醒管理人员介入。否则,进行到步骤S408,判断高度偏差是否大于阈值,例如5mm。 如果高度偏差大于该阈值,进行到步骤S409,提高或者降低抓取机构的高度进行补偿。否则,进行到步骤S410,判断横向位移偏差是否大于预设值(例如3mm)同时小于上述阈值(例如37mm),如果是,那么进行到步骤S411,进行横向移动补偿。否则,进行到步骤S412,判断角度偏差是否大于等于预设值而小于上述阈值,如果是,则进行自动引导车的角度旋转以补偿该角度偏差,例如在地面定位标识码上通过自动引导车底盘电机差动微调旋转,调整自动引导车的角度以补偿纠偏到合适角度。优选的,在步骤S411进行的横向移动补偿,补偿了所述横向位移偏差以及旋转所述角度偏差带来的横向位移。In step S404, it is determined whether the angle deviation is greater than the angle deviation threshold, which is, for example, 3.5 degrees. When the angle is greater than the threshold, proceed to step S405, and issue an error warning that the angle deviation is too large to remind the manager to intervene. Otherwise, proceed to step S406 to determine whether the lateral displacement deviation is greater than the lateral displacement deviation threshold, for example, 37 mm. When the lateral displacement deviation is greater than the threshold, proceed to step S407, and issue an error message indicating that the lateral displacement deviation is too large to remind the manager to intervene. Otherwise, proceed to step S408 to determine whether the height deviation is greater than a threshold, for example, 5 mm. If the height deviation is greater than the threshold, proceed to step S409 to increase or decrease the height of the grasping mechanism for compensation. Otherwise, proceed to step S410 to determine whether the lateral displacement deviation is greater than a preset value (for example, 3 mm) and smaller than the aforementioned threshold value (for example, 37 mm), if yes, then proceed to step S411 to perform lateral motion compensation. Otherwise, proceed to step S412 to determine whether the angle deviation is greater than or equal to the preset value but less than the above threshold. If yes, perform the angle rotation of the automatic guided vehicle to compensate for the angular deviation, for example, pass the automatic guided vehicle chassis on the ground positioning identification code The motor differentially adjusts the rotation and adjusts the angle of the automatic guided vehicle to compensate for the correct angle. Preferably, the lateral movement compensation performed in step S411 compensates the lateral displacement deviation and the lateral displacement caused by rotating the angle deviation.
补偿调整操作结束之后,进行到步骤S414,判断伸缩叉的标准伸缩量与补偿伸缩量/伸缩量偏差(带正负号)之和是否大于或等于伸缩叉的最大行程。本领域技术人员能够理解,伸缩量偏差可以是带正负号的量。例如当料箱过于靠近伸缩叉的边缘/过于靠近货架时,伸缩量偏差为负;当料箱过于远离伸缩叉的边缘/过于远离货架时,伸缩量偏差为正。如果大于或等于伸缩叉的最大行程,则进行到步骤S415,将伸缩叉伸出最大行程;否则,按照补偿后的伸缩量(标准伸缩量与补偿伸缩量/伸缩量偏差之和),将伸缩叉伸出。After the compensation adjustment operation is completed, proceed to step S414 to determine whether the sum of the standard telescopic amount of the telescopic fork and the compensation telescopic amount/the deviation (signed) is greater than or equal to the maximum stroke of the telescopic fork. Those skilled in the art can understand that the deviation of the amount of expansion and contraction can be a signed amount. For example, when the material box is too close to the edge of the telescopic fork/too close to the shelf, the expansion amount deviation is negative; when the material box is too far away from the edge of the telescopic fork/too far away from the shelf, the expansion amount deviation is positive. If it is greater than or equal to the maximum stroke of the telescopic fork, proceed to step S415 to extend the telescopic fork to the maximum stroke; otherwise, according to the compensated telescopic amount (the sum of the standard telescopic amount and the compensated telescopic amount / telescopic amount deviation), the telescopic fork is extended The fork sticks out.
伸缩叉伸出,然后进行步骤S417的碰撞/限位检测,如果检测到碰撞/限位,那么在步骤S418,发出碰撞/限位报错,否则,在步骤S419,伸缩叉收回,表明完成货物放置,之后回到步骤S401之后自动引导车的定位,包括先调整角度到初始角度(反向于之前的角度补偿操作),再恢复相对位置到停靠时的位置(反向于之前的横向位移偏差补偿操作),包括在步骤S420,角度回正,在步骤S421,左右方向回到码中心,动作结束,自动引导车准备好行进到下一个目标点。The telescopic fork is extended, and then the collision/limit detection of step S417 is performed. If a collision/limit is detected, then a collision/limit error report is issued in step S418, otherwise, in step S419, the telescopic fork is retracted, indicating that the cargo placement is completed , And then return to the positioning of the automatic guided vehicle after step S401, including adjusting the angle to the initial angle (reverse to the previous angle compensation operation), and then restore the relative position to the position when it is parked (reverse to the previous lateral displacement deviation compensation) Operation), including in step S420, the angle returns to the right, in step S421, the left and right directions return to the center of the code, the action ends, and the automatic guided vehicle is ready to travel to the next target point.
根据本发明的一个优选实施例,高度偏差的补偿采用绝对位置控制方式,例如沿着竖直方向移动抓取机构来进行校准,如上文的公式3所述,此处不再赘述。抓取机构伸缩量补偿同样采用绝对位置控制方式,计算如下:According to a preferred embodiment of the present invention, the compensation of the height deviation adopts an absolute position control method, for example, the gripping mechanism is moved along the vertical direction for calibration, as described in the
xtc=xs+Δxu (5)xtc = xs +Δxu (5)
其中xs为设定的抓取机构标准伸缩量,通过参数设置,Δxu为上视末端定位算法计算的标识物伸缩补偿量,xtc为补偿后抓取机构绝对位置伸缩量。Among them, xs is the set standard expansion and contraction amount of the grasping mechanism. Through parameter setting, Δxu is the marker expansion compensation amount calculated by the top-view end positioning algorithm, and xtc is the absolute position expansion and contraction amount of the grasping mechanism after compensation.
运动(横向)方向和角度补偿采用线速度和角速度控制方式,通过微移动在当前停靠位置进行相对运动补偿,即将自动引导车本体移动和旋转对应的补偿信息Δyθ和Δθ。最终实现整体偏差量的补偿调整,完成准确放置。The motion (lateral) direction and angle compensation adopt linear velocity and angular velocity control methods, and perform relative motion compensation at the current parking position through micro-movement, that is, automatically guide the compensation information Δyθ and Δθ corresponding to the movement and rotation of the car body. Finally realize the compensation adjustment of the overall deviation and complete the accurate placement.
本发明的优点为依靠视觉传感器和改变AGV在停靠点的相对位置实现纠偏,该控制方法减少了抓取机构的自旋转轴,降低了控制维度和难度,适用范围对象更大。同时,针对抓取机构的控制采用绝对位置控制方式,通过设置零点和下发脉冲数来控制伺服电机驱动器编码器,可以提高控制的精度以及运动的重复精度,从而提高抓取的成功率。The invention has the advantages of relying on the vision sensor and changing the relative position of the AGV at the stopping point to realize deviation correction. The control method reduces the self-rotating shaft of the grasping mechanism, reduces the control dimension and difficulty, and has a larger scope of application. At the same time, the control of the grasping mechanism adopts an absolute position control method. The servo motor drive encoder is controlled by setting the zero point and the number of pulses issued, which can improve the control accuracy and the motion repeat accuracy, thereby increasing the success rate of grasping.
根据本发明的一个优选实施例,所述控制方法还包括:当所述角度偏差大于角度偏差阈值,或所述横向位移偏差大于横向位移偏差阈值时,发出报警。According to a preferred embodiment of the present invention, the control method further includes: issuing an alarm when the angular deviation is greater than the angular deviation threshold, or the lateral displacement deviation is greater than the lateral displacement deviation threshold.
根据本发明的一个优选实施例,所述控制方法还包括:当所述横向位移偏差大于 预定值时,使所述自动引导车相对于其竖直轴线的旋转所述角度偏差,使所述自动引导车平行于所述待搬运目标移动一定距离,所述一定距离补偿所述横向位移偏差以及旋转所述角度偏差带来的横向位移;当所述横向位移偏差小于横向位移偏差预定值时,使所述自动引导车相对于其竖直轴线旋转一定角度,补偿所述横向位移偏差和/或所述角度偏差。According to a preferred embodiment of the present invention, the control method further includes: when the lateral displacement deviation is greater than a predetermined value, making the automatic guided vehicle rotate the angle deviation relative to its vertical axis to make the automatic The guided vehicle moves a certain distance parallel to the object to be transported, and the certain distance compensates for the lateral displacement deviation and the lateral displacement caused by the rotation of the angular deviation; when the lateral displacement deviation is less than the predetermined value of the lateral displacement deviation, The automatic guided vehicle rotates by a certain angle relative to its vertical axis to compensate for the lateral displacement deviation and/or the angular deviation.
根据上述实施例中的方法400,使所述自动引导车相对于其竖直轴线的旋转来弥补所述角度偏差,使所述自动引导车平行于所述待搬运目标移动一定距离,所述一定距离补偿所述横向位移偏差以及旋转所述角度偏差带来的横向位移。According to the
根据上述实施例,所述控制方法还包括:当所述角度偏差大于角度偏差阈值,或所述横向位移偏差大于横向位移偏差阈值时,发出报警。According to the foregoing embodiment, the control method further includes: issuing an alarm when the angular deviation is greater than an angular deviation threshold, or the lateral displacement deviation is greater than a lateral displacement deviation threshold.
根据上述的实施例,所述控制方法还包括:当所述角度偏差小于或等于所述角度偏差阈值、且所述横向位移偏差小于或等于所述横向位移偏差阈值时,判断所述横向位移偏差是否大于横向位移偏差预定值;当所述横向位移偏差大于所述横向位移偏差预定值时,使所述自动引导车平行于所述待搬运目标移动移动以补偿所述横向位移偏差;否则,不补偿所述横向位移偏差。According to the above-mentioned embodiment, the control method further includes: determining the lateral displacement deviation when the angular deviation is less than or equal to the angular deviation threshold and the lateral displacement deviation is less than or equal to the lateral displacement deviation threshold. Whether it is greater than the predetermined value of lateral displacement deviation; when the lateral displacement deviation is greater than the predetermined value of lateral displacement deviation, make the automatic guided vehicle move parallel to the object to be transported to compensate for the lateral displacement deviation; otherwise, no Compensate the lateral displacement deviation.
根据上述实施例,所述控制方法还包括:判断所述角度偏差是否小于所述角度偏差阈值并大于角度偏差设定值,如果所述角度偏差小于所述角度偏差阈值并大于角度偏差设定值,使所述自动引导车相对于其竖直轴线旋转以补偿所述角度偏差;否则,不补偿所述角度偏差。According to the above embodiment, the control method further includes: determining whether the angle deviation is less than the angle deviation threshold value and greater than the angle deviation setting value, if the angle deviation is less than the angle deviation threshold value and greater than the angle deviation setting value , The automatic guided vehicle is rotated relative to its vertical axis to compensate for the angular deviation; otherwise, the angular deviation is not compensated.
根据上述实施例,判断所述抓取机构的标准伸缩量与所述伸缩量偏差之和是否大于所述抓取机构的最大伸缩行程;如果大于所述最大伸缩行程,将所述抓取机构伸出所述最大伸缩行程;否则,按照所述抓取机构的标准伸缩量与所述伸缩量偏差之和,伸出所述抓取机构。According to the above embodiment, it is determined whether the sum of the standard telescopic amount of the grasping mechanism and the deviation of the telescopic amount is greater than the maximum telescopic stroke of the grasping mechanism; if it is greater than the maximum telescopic stroke, the grasping mechanism is extended The maximum telescopic stroke; otherwise, extend the gripping mechanism according to the sum of the standard telescopic amount of the gripping mechanism and the deviation of the telescopic amount.
根据上述的实施例,进行碰撞/限位检测,在未检测到碰撞/限位的情况下,放置所述货物并收回所述抓取机构;根据所述横向位移偏差和/或角度偏差,恢复所述自动引导车的定位。According to the above-mentioned embodiment, collision/limit detection is performed, and in the case of no collision/limit detection, the cargo is placed and the grasping mechanism is retracted; according to the lateral displacement deviation and/or angle deviation, the recovery The positioning of the automated guided vehicle.
本发明的一个实施例还涉及一种自动引导车,例如如图1-4中示出的自动引导车1。其包括:车体;和An embodiment of the present invention also relates to an automatic guided vehicle, such as the automatic guided
电机,安装在所述车体上;The motor is installed on the vehicle body;
行进装置,安装在所述车体上并被所述电机驱动;Traveling device installed on the vehicle body and driven by the motor;
抓取机构,所述抓取机构设置在所述车体上,并可从货架上抓取物品并可将物品放置在货架上;A grasping mechanism, the grasping mechanism is arranged on the vehicle body, and can grab items from the shelf and place the items on the shelf;
控制装置,所述控制装置安装在所述车体上,并配置成可执行如上所述的控制方法100/200/300/400。The control device is installed on the vehicle body and configured to execute the
并且优选的,自动引导车上不设置有用于调节抓取机构的角度的机构或装置,从而可以极大地降低自动引导车的控制难度。And preferably, the automatic guided vehicle is not provided with a mechanism or device for adjusting the angle of the grasping mechanism, so that the control difficulty of the automatic guided vehicle can be greatly reduced.
优选的,所述自动引导车还包括侧视摄像头,所述侧视摄像头与所述控制装置耦合,从而所述控制装置根据所述侧视摄像头捕获的图像,计算所述抓取机构相对于所 述物品的偏差。Preferably, the automated guided vehicle further includes a side-view camera coupled with the control device, so that the control device calculates the relative position of the grasping mechanism relative to the image captured by the side-view camera. Describe the deviation of the item.
本发明的一个实施例涉及一种自动引导车,例如如图1-4中示出的自动引导车1。其包括:车体;和One embodiment of the present invention relates to an automatic guided vehicle, such as the automatic guided
电机,安装在所述车体上;The motor is installed on the vehicle body;
行进装置,安装在所述车体上并被所述电机驱动;Traveling device installed on the vehicle body and driven by the motor;
抓取机构,所述抓取机构设置在所述车体上,并可从货架上抓取物品并可将物品放置在货架上;A grasping mechanism, the grasping mechanism is arranged on the vehicle body, and can grab items from the shelf and place the items on the shelf;
侧视摄像头,设置在所述车体或抓取机构上,以拍摄所述自动引导车前方或侧方的图像;和A side-view camera, which is arranged on the vehicle body or the grasping mechanism to take images of the front or side of the automatic guided vehicle; and
上视摄像头,设置在所述车体或抓取机构上,以拍摄所述抓取机构上承载的物品底部的图像。The top-view camera is arranged on the vehicle body or the grasping mechanism to take an image of the bottom of the article carried on the grasping mechanism.
根据本发明的一个优选实施例,该自动引导车还包括控制装置,所述控制装置与所述侧视摄像头和上视摄像头耦合,并配置成可执行如上所述的控制方法100/200/300/400。According to a preferred embodiment of the present invention, the automated guided vehicle further includes a control device, which is coupled with the side-view camera and the top-view camera, and is configured to execute the
根据本发明的一个优选实施例,所述的自动引导车还包括升降装置,所述升降装置设置在所述抓取机构和所述车体之间,可升高或降低所述抓取机构。并且优选的,自动引导车上不设置有用于调节抓取机构的角度的机构或装置,从而可以极大地降低自动引导车的控制难度。According to a preferred embodiment of the present invention, the automatic guided vehicle further includes a lifting device, which is arranged between the grasping mechanism and the vehicle body, and can raise or lower the grasping mechanism. And preferably, the automatic guided vehicle is not provided with a mechanism or device for adjusting the angle of the grasping mechanism, so that the control difficulty of the automatic guided vehicle can be greatly reduced.
本发明还涉及一种智能仓储系统,包括:The invention also relates to an intelligent storage system, including:
货架,所述货架上可放置料箱,所述料箱的侧部具有侧部标识符;A shelf on which a material box can be placed, and the side of the material box has a side identifier;
如上所述的自动引导车;The automatic guided vehicle as described above;
调度系统,所述调度系统与所述自动引导车通讯,并且可向所述自动引导车分配从所述货架上搬运料箱的任务。A dispatching system, the dispatching system communicates with the automatic guided vehicle, and the automatic guided vehicle can be assigned the task of transporting bins from the shelves.
本发明的实施例中,可以依靠视觉传感器和改变AGV在停靠点的相对位置实现位置纠偏,该控制方法不需要增加抓取机构的自旋转轴,降低了控制维度和难度,适用范围对象更大。调节自动引导车而非抓取机构。In the embodiment of the present invention, the position correction can be achieved by relying on the visual sensor and changing the relative position of the AGV at the stopping point. This control method does not need to increase the self-rotating axis of the grasping mechanism, reduces the control dimension and difficulty, and has a larger scope of application. . Adjust the automatic guided vehicle instead of the gripping mechanism.
所述实施例为本发明的优选实施方式,但本发明并不限于上述实施方式,应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。The embodiments are preferred embodiments of the present invention, but the present invention is not limited to the above-mentioned embodiments, and it should be recognized that the above description should not be considered as a limitation to the present invention. After those skilled in the art have read the above content, various modifications and alternatives to the present invention will be obvious. Therefore, the protection scope of the present invention should be defined by the appended claims.
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。The above descriptions are only the preferred embodiments of the present invention and are not intended to limit the present invention. Any modification, equivalent replacement, improvement, etc. made within the spirit and principle of the present invention shall be included in the present invention. Within the scope of protection.
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。Finally, it should be noted that the above are only the preferred embodiments of the present invention and are not intended to limit the present invention. Although the present invention has been described in detail with reference to the foregoing embodiments, it is still for those skilled in the art. The technical solutions described in the foregoing embodiments may be modified, or some of the technical features may be equivalently replaced. Any modification, equivalent replacement, improvement, etc., made within the spirit and principle of the present invention should be included in the protection scope of the present invention.
Claims (27)
Translated fromChineseApplications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910585312.6 | 2019-07-01 | ||
| CN201910585312.6ACN112173519A (en) | 2019-07-01 | 2019-07-01 | Control method and automatic guided vehicle |
| CN201910584918.8ACN112173518A (en) | 2019-07-01 | 2019-07-01 | Control method and automatic guided vehicle |
| CN201910584918.8 | 2019-07-01 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021000370A1true WO2021000370A1 (en) | 2021-01-07 |
Family
ID=74100152
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/CN2019/098394CeasedWO2021000370A1 (en) | 2019-07-01 | 2019-07-30 | Control method and automated guided vehicle |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2021000370A1 (en) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107085428A (en)* | 2017-05-18 | 2017-08-22 | 广州视源电子科技股份有限公司 | Intelligent moving method, device, robot and storage medium |
| JP2018140843A (en)* | 2017-02-27 | 2018-09-13 | 株式会社豊田自動織機 | Unmanned forklift steering control method |
| CN108803603A (en)* | 2018-06-05 | 2018-11-13 | 广州市远能物流自动化设备科技有限公司 | AGV trolley butt junction location methods based on coded image and AGV trolleies |
| CN109230475A (en)* | 2017-07-11 | 2019-01-18 | 浙江国自机器人技术有限公司 | Pallet deviation correction method and device |
| CN109650292A (en)* | 2019-02-02 | 2019-04-19 | 北京极智嘉科技有限公司 | The location regulation method and medium of a kind of intelligent forklift and intelligent forklift |
- 2019
- 2019-07-30WOPCT/CN2019/098394patent/WO2021000370A1/ennot_activeCeased
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018140843A (en)* | 2017-02-27 | 2018-09-13 | 株式会社豊田自動織機 | Unmanned forklift steering control method |
| CN107085428A (en)* | 2017-05-18 | 2017-08-22 | 广州视源电子科技股份有限公司 | Intelligent moving method, device, robot and storage medium |
| CN109230475A (en)* | 2017-07-11 | 2019-01-18 | 浙江国自机器人技术有限公司 | Pallet deviation correction method and device |
| CN108803603A (en)* | 2018-06-05 | 2018-11-13 | 广州市远能物流自动化设备科技有限公司 | AGV trolley butt junction location methods based on coded image and AGV trolleies |
| CN109650292A (en)* | 2019-02-02 | 2019-04-19 | 北京极智嘉科技有限公司 | The location regulation method and medium of a kind of intelligent forklift and intelligent forklift |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112173518A (en) | Control method and automatic guided vehicle | |
| CN109436820B (en) | A method and system for destacking cargo stacks | |
| EP4111285B1 (en) | Method for controlling an automatic guided vehicle and control system adapted to execute the method | |
| CN107324041B (en) | Manipulator and automatic film magazine handling device for film magazine clamping | |
| CN112173519A (en) | Control method and automatic guided vehicle | |
| CN104085794B (en) | Intelligent detection system and method for distribution profile and position of container | |
| CN111792582B (en) | Load handling module for materials handling vehicle | |
| EP3854535A1 (en) | Real-time determination of object metrics for trajectory planning | |
| JP2025505267A (en) | Methods for retrieving and storing cargo stored in a warehouse and transport robots | |
| TW200932646A (en) | Automatic load system and operation method of the same | |
| CN110703745A (en) | Navigation of an automated guided vehicle | |
| CN114537940A (en) | Shuttle vehicle for warehousing system, warehousing system and control method of shuttle vehicle | |
| CN113955360A (en) | Automatic steel coil warehousing method and system on vehicle based on full-automatic unmanned crane | |
| CN114655843B (en) | A small lifting and handling equipment for automatically identifying cargo identification and its control method | |
| CN106629399A (en) | Container aligning guide system for containers | |
| CN115826576A (en) | An intelligent control system and method for a self-loading forklift robot | |
| CN115636274A (en) | A fully automatic cargo loading and unloading system | |
| CN119461068A (en) | A fully automatic method for grabbing and releasing containers in ports | |
| CN112703369B (en) | Motion control for an automated guided vehicle | |
| US20250130580A1 (en) | Autonomous mobile robot operations for in-trailer loading | |
| WO2021000370A1 (en) | Control method and automated guided vehicle | |
| JPH03252707A (en) | Unmanned vehicle with vision | |
| CN216686389U (en) | Conveying device and conveying system | |
| JP3443829B2 (en) | Location management system and manned forklift used for it | |
| TWI668087B (en) | Implicit positioning corrective method of an automatic guided vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application | Ref document number:19935823 Country of ref document:EP Kind code of ref document:A1 | |
| NENP | Non-entry into the national phase | Ref country code:DE | |
| 122 | Ep: pct application non-entry in european phase | Ref document number:19935823 Country of ref document:EP Kind code of ref document:A1 | |
| 32PN | Ep: public notification in the ep bulletin as address of the adressee cannot be established | Free format text:NOTING OF LOSS OF RIGHTS PURSUANT TO RULE 112(1) EPC (EPO FORM 1205A DATED 01/06/2022) |