WO2020049636A1 - Identification system, model presentation method, and model presentation program - Google Patents
Identification system, model presentation method, and model presentation programDownload PDFInfo
- Publication number
- WO2020049636A1 WO2020049636A1PCT/JP2018/032761JP2018032761WWO2020049636A1WO 2020049636 A1WO2020049636 A1WO 2020049636A1JP 2018032761 WJP2018032761 WJP 2018032761WWO 2020049636 A1WO2020049636 A1WO 2020049636A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- model
- identification
- unit
- identification system
- image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images















Classifications
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N99/00—Subject matter not provided for in other groups of this subclass
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
Definitions
- the present inventionrelates to an identification system for identifying an object represented by data by applying the data to the model, and a model providing method and a model providing program for the identification system to provide a model to another identification system.
- a general identification systemlearns a model in advance by machine learning using, as teacher data, a set of an image obtained by photographing with a camera included in the identification system and a label representing an object appearing in the image. . Then, the general identification system identifies an object shown in the image by applying an image newly obtained by photographing by the camera to the model.
- Such a general identification systemis used for the purpose of detecting a suspicious vehicle or a suspicious person, preventing crime, etc., detecting a user using a white stick or a wheelchair, and using a white stick or a wheelchair. It is used for the purpose of support such as guiding people.
- the identification system for identifying an object appearing in an imagehas been described as an example, but an identification system for identifying an object represented by voice data is also conceivable as a general identification system.
- an identification system for identifying an object appearing in an imagewill be described as an example.
- Patent Document 1describes an image recognition method that avoids prolonged additional learning due to a difference in an imaging environment.
- the image recognition method described in Patent Document 1is an image recognition method in a camera system including a plurality of camera devices.
- a first image and first imaging environment informationare acquired from a first camera device.
- a parameter tablethat manages imaging environment information indicating each imaging environment when each camera device has previously captured an image and each recognition control parameter indicating each detector function corresponding to each imaging environment.
- a first recognition control parameterindicating a first detector function corresponding to the same or similar imaging environment as the first imaging environment indicated in the first imaging environment information.
- the first image obtained from the first camera deviceis recognized using the first detector function indicated by the first recognition control parameter.
- Patent Document 2discloses an image monitoring device.
- the image monitoring device described in Patent Literature 2normalizes a face area using the detected facial feature points and performs matching with a person dictionary.
- a biasoccurs in how an object is captured in an image obtained by one camera by shooting.
- one camerahas many opportunities to photograph a car traveling from right to left as viewed from the camera, but has few opportunities to photograph a car traveling in the opposite direction.
- many images of a car traveling in the right-to-left directionare obtained, but only a few images of a car traveling in the opposite direction are obtained.
- the teacher dataincludes many images of vehicles traveling in the right-to-left direction, and includes only a few images of vehicles traveling in the opposite direction.
- the present inventionprovides an identification system that can re-learn its own model so as to improve the identification accuracy of its own model, and can also contribute to improving the identification accuracy of models of other identification systems, It is an object to provide a model providing method and a model providing program.
- An identification systemincludes: learning means for learning a model for identifying an object represented by data using teacher data; first model storage means for storing a model learned by the learning means; First identifying means for identifying an object represented by data using a model learned by the first and second model storages for storing individual models learned by a plurality of predetermined first identification systems, respectively.
- Model updating meansfor updating to a model received from the first identification system; and, in a predetermined case, for each model stored in the second model storage means,
- a second identification meansfor identifying an object represented by the data identified by the first identification means;
- a learning meanscomprising: a label for data determined based on an identification result derived by the second identification means; Is re-learned using the teacher data including the following, the model stored in the first model storage unit is updated to the re-learned model, and the model learned by the learning unit is set to a predetermined one.
- a model transmitting meansfor transmitting to one or more second identification systems.
- a model for identifying an object represented by datais learned using teacher data, the model is stored in the first model storage unit, and the model is stored in the first model storage unit.
- a model learned by the first identification systemis received from the first identification system, the model learned by the first identification system stored in the second model storage means is stored in the second model storage unit.
- the modelis updated to the model received from the first identification system, and in a predetermined case, for each model stored in the second model storage means, the data to be identified in the first identification process is determined.
- the model providing programis a learning process for causing a computer to learn a model for identifying an object represented by data using teacher data, and to store the model in a first model storage unit.
- a first identification process for identifying an object represented by data using a model stored in the model storage means, and individual models learned by a plurality of predetermined first identification systemsare respectively assigned to a second model. Processing to be stored in the storage means; when a model learned by the first identification system is received from the first identification system, the model is learned by the first identification system stored in the second model storage means.
- Model updating processingfor updating the model that has been updated to the model received from the first identification system, and in a predetermined case, the individual model stored in the second model storage means.
- a second identification processfor identifying an object represented by data to be identified in the first identification process, a label for data determined based on an identification result derived in the second identification process, and the data
- a re-learning processfor re-learning the model using the included teacher data and updating the model stored in the first model storage unit to the re-learned model, and stored in the first model storage unit
- a model transmission process for transmitting the model to one or more predetermined second identification systemsis performed.
- the present inventionit is possible to re-learn the own model so as to improve the identification accuracy of the own model, and to contribute to the improvement of the identification accuracy of the model of another identification system.
- FIG. 1is a block diagram illustrating a configuration example of an identification system 100 according to an embodiment of the present invention. It is a schematic diagram which shows the example of an internally generated model and an externally generated model. It is a schematic diagram which shows the example of the screen which a determination part displays on a display apparatus in the 1st determination method. It is a schematic diagram which shows the example of the screen which a determination part displays on a display apparatus in the 3rd determination method.
- FIG. 4is an explanatory diagram illustrating a specific example of a first calculation method.
- FIG. 9is an explanatory diagram illustrating a specific example of a second calculation method.
- 11is a flowchart illustrating an example of processing progress from the time when the camera captures an image to the time when a second identification unit performs an identification process on an image.
- FIG. 11is a schematic block diagram illustrating a configuration example of a computer included in an identification system according to an embodiment of the present invention or a modified example thereof. It is a block diagram showing the outline of the identification system of the present invention.
- FIG. 1is a schematic diagram showing a situation where a plurality of identification systems of the present invention are provided.
- FIG. 1illustrates a case where six identification systems 100 are provided at various locations, but the number of identification systems 100 provided at various locations is not particularly limited. In the present embodiment, a description will be given assuming that the plurality of identification systems 100 have the same configuration.
- Each identification system 100can communicate, for example, via a communication network.
- Each of the identification systems 100includes a data collection unit (a data collection unit 101 shown in FIG. 3 described later).
- the data collection units (not shown in FIG. 1; see FIG. 3 described later) of each identification system 100are installed in various places where data is collected.
- the data collection unitcollects data at a location where the data collection unit is installed.
- the data collection unitcollects image and audio data at the installation location.
- the data collection unitis realized by a camera or a microphone.
- the data collection unitmay collect images by photographing a monitoring place.
- audio datamay be collected by recording at an installation location.
- Each individual identification system 100includes a computer separate from the data collection unit, and the computer identifies an object represented by data (image, audio data, and the like).
- Each identification system 100learns a model using data collected by the data collection unit as teacher data.
- This modelis a model for identifying an object represented by data.
- each identification system 100provides a model, and re-learns its own model by using a model provided by another identification system 100.
- Another identification system 100 that transmits a model to the identification system 100 of interestis predetermined.
- Another identification system 100 that transmits a model to the identification system 100 of interestis referred to as a first identification system.
- a descriptionwill be given assuming that a plurality of first identification systems are determined for the identification system 100 of interest. It can be said that the identification system 100 of interest receives the model from the first identification system.
- another identification system 100 that is a transmission destination when the identification system 100 of interest transmits the modelis predetermined.
- Another identification system 100 that is a transmission destination when the identification system 100 of interest transmits the modelis referred to as a second identification system.
- a descriptionwill be given assuming that one or more second identification systems are determined for the identification system 100 of interest.
- the identification system 100 of interestcan be said to provide a model to the second identification system.
- the first identification system and the second identification systemare predetermined for each individual identification system 100.
- an administrator who manages each identification system 100may determine a first identification system and a second identification system for each individual identification system 100 in advance.
- Each identification system 100has the same configuration, but the first identification system and the second identification system are individually determined for each identification system 100.
- FIG. 2is an explanatory diagram showing an example of the first identification system and the second identification system.
- the identification system 100ashown in FIG.
- arrowsindicate the direction in which the model is sent.
- the identification systems 100b and 100care defined as first identification systems
- the identification systems 100b, 100c and 100dare defined as second identification systems.
- a first identification system and a second identification systemare individually defined.
- FIG. 3is a block diagram showing a configuration example of the identification system 100 according to the embodiment of the present invention.
- the identification system 100includes a data collection unit 101 and a computer 102.
- the data collection unit 101 and the computer 102are communicably connected by wire or wirelessly.
- a case where the data collection unit 101 is a camerawill be described as an example, and the data collection unit 101 will be referred to as a camera 101.
- the camera 101performs shooting from the installation location of the camera 101.
- the installation location of the camera 101 and the installation location of the computer 102may be different.
- the computer 102includes a learning unit 103, a first model storage unit 104, a data acquisition unit 105, a first identification unit 106, a determination unit 107, an area correction GUI (Graphical User Interface) display control unit 108, , Region extraction unit 109, second model storage unit 110, model update unit 121, second identification unit 111, display control unit 112, attribute data storage unit 113, integration unit 114, display device 115, a mouse 116, a result storage unit 117, and a model transmission unit 122.
- GUIGraphic User Interface
- the learning unit 103learns a model by machine learning using the image obtained by the camera 101 as the teacher data.
- the teacher datais, for example, a set of a set of an image obtained by photographing with the camera 101 and a label indicating an object appearing in the image.
- the labelmay be determined by the operator of the identification system 100.
- a modelis learned (generated) using such a set of sets as teacher data.
- the learning unit 103adds a set of the image and the label to the teacher data, and re-learns the model by deep learning.
- the predetermined imageis an image determined by the determination unit 107 described later to cause the second identification unit 111 to execute the identification processing. Note that, in the present embodiment, an example will be described in which a region in which an object is extracted is extracted from an image determined as described above, and a pair of an image of the extracted region and a label is added to teacher data. I do.
- a model generated by the learning unit 103 through learningmay be hereinafter referred to as an internally generated model.
- the second model storage unit 110stores a model similarly generated by the first identification system predetermined for the identification system 100 shown in FIG.
- a model generated by the first identification systemmay be referred to as an externally generated model to distinguish it from an internally generated model.
- a model updating unit 121 described belowreceives the model from the first identification system, and stores the model in the second model storage unit 110 as an externally generated model.
- the internally generated model and the externally generated modelare models for identifying an object appearing in a given new image.
- the objects appearing in the imageare “car”, “motorcycle”, “bus”, and “background (that is, car, motorcycle and bus are not shown)”.
- the modelis a model for determining which one.
- the operatordetermines one of “automobile”, “motorcycle”, “bus”, and “background” as a label to be paired with an image in the teacher data for each image.
- the operator of the first identification systemmay use the “automobile”, “motorcycle”, “bus”, One of the “background” is determined for each image.
- the first identification unit 106determines whether the object shown in the image is “car”, “motorcycle”, “bus”, or “background” using a model is described.
- the target determined using the modelis not limited to “automobile”, “motorcycle”, “bus”, and “background”.
- the operatormay prepare teacher data according to the purpose of the identification processing, and let the learning unit 103 learn the model using the teacher data.
- the objects to be determined using the modelare common to each identification system 100.
- the learning unit 103causes the first model storage unit 104 to store the internally generated model generated by the deep learning.
- the first model storage unit 104is a storage device that stores an internally generated model.
- FIG. 4is a schematic diagram illustrating an example of an internally generated model and an externally generated model.
- the imagecan be represented as a vector (X1, X2,..., Xn) T having each pixel value of n pixels as an element.
- X1represents the pixel value of the first pixel in the image.
- Tmeans transposition.
- the modelhas a plurality of layers and includes a plurality of coefficients for each layer. In the example shown in FIG. 4, the first layer includes coefficients a1 to am, and the second layer includes coefficients b1 to bj.
- the individual elements X1 to Xn of the vector representing the imageare associated with the respective coefficients a1 to am of the first layer.
- this associationis represented by a line.
- each coefficient of a certain layeris associated with each coefficient of the next layer.
- this associationis also represented by a line.
- a weightis determined between the associated elements. For example, weights are determined for the associated a1 and b1, the associated a1 and b2, and the like.
- the learning unit 103determines the number of layers, the number of coefficients included in each layer, the value of each coefficient in each layer, and the value of the weight between associated elements by performing deep learning using the teacher data. . Determining these values corresponds to generating an internally generated model.
- the internally generated model and the externally generated modelcan be represented as shown in the format illustrated in FIG. 4, but the number of layers, the number of coefficients included in each layer, the value of each coefficient in each layer, the , Etc., differ between the internally generated model and the externally generated model.
- the second model storage unit 110stores each of the externally generated models learned by the plurality of first identification systems. Each of the externally generated models is also generated based on different teacher data in different identification systems 100, and thus the number of layers and the like are different for each externally generated model.
- the data acquisition unit 105acquires a new image obtained by the camera 101 by shooting from the camera 101.
- the data acquisition unit 105is an interface for receiving an image from the camera 101.
- the first identification unit 106applies the image to an internally generated model stored in the first model storage unit 104, thereby Identify the object represented by the image.
- the first identification unit 106applies the image to the internally generated model to determine whether the object shown in the image is “car”, “motorcycle”, or “bus”. Alternatively, it is determined whether only the “background” is captured.
- a vector (X1, X2,..., Xn) T representing the imageis determined.
- the first identification unit 106calculates “automobile” by using the vector (X1, X2,..., Xn) T , each coefficient of each layer included in the internally generated model, and each weight included in the model. , “Motorcycle”, “bus”, and “background” are calculated. Then, the first identification unit 106 determines the label with the highest reliability among “car”, “motorcycle”, “bus”, and “background” as a label indicating an object appearing in the image. .
- the reliability of “car”, “motorcycle”, “bus”, and “background”is “0.6”, “0”, .2 ",” 0.1 ", and” 0.1 "are obtained.
- the first identification unit 106identifies the object appearing in the image as an “automobile” having the highest reliability “0.6”.
- the first identifying unit 106represents a rectangular area surrounding the object (“car”, “motorcycle” or “bus”) shown in the image as the image.
- the determinationis made by an operation using the vector and the internally generated model.
- the fact that the determined label is “background”means that it is determined that the object is not shown in the image. In this case, the first identification unit 106 determines that the object Does not determine the rectangular area surrounding.
- the first identification unit 106associates the image subjected to the identification processing, the label corresponding to the identification result, and the reliability corresponding to the label, and stores the image in the result storage unit 117.
- the first identification unit 106determines that the object shown in the image is “car” having the highest reliability “0.6”.
- the first identification unit 106causes the result storage unit 117 to store the image, the label “car”, and the reliability “0.6” in association with each other.
- the result storage unit 117is a storage device that stores identification results and the like. However, the result storage unit 117 additionally stores information indicating a rectangular area in the image, as described later.
- the second model storage unit 110is a storage device that stores a model different from the internally generated model (the model generated by the learning unit 103). More specifically, the second model storage unit 110 stores individual models (externally generated models) learned by a plurality of first identification systems predetermined for the identification system 100 shown in FIG. Remember. Each model stored in the second model storage unit 110 is represented in the same format as the model schematically shown in FIG.
- the model updating unit 121receives a model from each of a plurality of first identification systems predetermined for the identification system 100 shown in FIG. 3, and uses the model as an externally generated model in the second model storage unit 110. To memorize.
- Each first identification systemincludes a model transmission unit 122 described later, similarly to the identification system 100 shown in FIG. Then, the model transmitting unit 122 of each first identification system transmits the model learned by the first identification system to the identification system 100 shown in FIG. 3 as appropriate.
- the model updating unit 121receives the model transmitted by the first identification system. It is assumed that the first identification system transmits a model to the identification system 100 shown in FIG. 3 for the first time. In that case, the second model storage unit 110 has not yet stored the model learned by the first identification system. At this time, the model updating unit 121 stores the received model as an externally generated model in the second model storage unit 110 in association with the information indicating the first identification system that is the transmission source. It is also assumed that the first identification system has previously transmitted a model to the identification system 100 shown in FIG. In that case, the second model storage unit 110 has already stored the model learned by the first identification system. At this time, the model updating unit 121 updates a model already stored in the second model storage unit 110 as a model learned by the first identification system to a newly received model.
- the second model storage unit 110stores all the individual models (externally generated models) learned by a plurality of first identification systems predetermined for the identification system 100 shown in FIG. It is assumed that it has been stored. In this state, when receiving the model from the first identification system, the model updating unit 121 updates the model stored in the second model storage unit 110 to the received model.
- the second identification unit 111applies a predetermined image among the images identified by the first identification unit 106 to the externally generated model stored in the second model storage unit 110, An object in the predetermined image is identified.
- the second identification unit 111performs this processing for each externally generated model.
- the second identification unit 111calculates the reliability of “automobile”, “motorcycle”, “bus”, and “background” by applying a predetermined image to the externally generated model. Then, the second identification unit 111 determines a label with the highest reliability among “automobile”, “motorcycle”, “bus”, and “background” as a label indicating an object appearing in the image. .
- the predetermined image of the images identified by the first identification unit 106is a predetermined image among the images identified by the first identification unit 106. This is an image determined to cause the image processing unit 111 to execute the identification processing.
- the determination unit 107determines an image that causes the second identification unit 111 to execute the identification process, from among the images that have been identified by the first identification unit 106.
- three types of determination methodswill be exemplified as a method in which the determination unit 107 determines an image to be subjected to the identification processing by the second identification unit 111 among the images identified by the first identification unit 106. Will be explained.
- the determination unit 107may employ only one of the following three types of determination methods. Alternatively, the determination unit 107 may employ a plurality of determination methods among the following three types of determination methods.
- the determining unit 107determines to cause the second identifying unit 111 to execute the identifying process on a certain image by any one of the plurality of determining methods, the determining unit 107 Thus, it is determined that the second identification unit 111 executes the identification processing.
- the first determination methodis that, when the label determined by the first identification unit 106 as a label representing an object appearing in an image is incorrect, the determination unit 107 determines the second This is a method of determining that the identification unit 111 performs the identification processing. That is, this is a method in which the determination unit 107 determines that the second identification unit 111 performs the identification process on the image that is incorrectly identified by the first identification unit 106. Whether or not the label determined by the first identification unit 106 is incorrect may be determined by, for example, an operator of the identification system 100. Hereinafter, this case will be described as an example.
- the determination unit 107When the first identification unit 106 determines a label for an image, the determination unit 107 provides a GUI for allowing the operator to input the image, the label determined for the image, and whether the label is correct. (In this example, two buttons are used.) Is displayed on the display device 115.
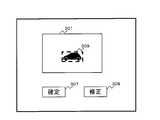
- FIG. 5is a schematic diagram illustrating an example of a screen displayed on the display device 115 by the determination unit 107 in the first determination method.
- the determination unit 107determines whether the image 301 that is the identification target of the first identification unit 106 and the first identification unit 106, as illustrated in FIG. A screen showing the determined label 302 (“motorcycle” in the example shown in FIG. 5) and the first button 304 and the second button 305 is displayed on the display device 115.
- the first button 304is a button for inputting that the label for the image is correct. Clicking on the first button 304 means that information indicating that the label for the image is correct has been input by the operator. I do.
- the second button 305is a button for inputting that the label for the image is incorrect.
- the second button 305When the second button 305 is clicked, information indicating that the label for the image is incorrect is displayed by the operator. Means input from In the example shown in FIG. 5, the image 301 shows the self-disembarkation, but “Motorcycle” is displayed as the label determined by the first identification unit 106. Therefore, the operator clicks the second button 305 using the mouse 116. In the example illustrated in FIG. 5, if “automobile” is displayed as the label determined by the first identification unit 106, the operator clicks the first button 304.
- the determining unit 107determines that the label determined by the first identifying unit 106 is incorrect, and the first identifying unit 106 identifies the label. It is determined that the second identification unit 111 performs the identification processing on the target image 301.
- the determination unit 107determines that the second identification unit 111 does not perform the identification processing on the image 301 that is the identification target of the first identification unit 106. I do.
- the determination unit 107identifies the image to the second identification unit 111. This is a method of determining to execute the processing.
- the determination unit 107causes the second identification unit 111 to execute the identification process on the image. Is determined. If the reliability corresponding to the label determined by the first identification unit 106 for the image exceeds the threshold, the determination unit 107 causes the second identification unit 111 to perform identification processing on the image. Is determined not to be executed.
- the threshold valueis, for example, “0.5”, but may be a value other than “0.5”.
- the determination unit 107determines whether or not to cause the second identification unit 111 to execute identification processing on an image by comparing the reliability derived by the first identification unit 106 with a threshold. decide. Therefore, it is not necessary to display the screen illustrated in FIG. 5 in the second determination method.
- the determination unit 107determines that the second identification unit 111 performs the identification process on the image. In other words, although the third determination method determines that the image does not include any of “car”, “motorcycle”, and “bus” in the image, , "Motorcycle” or "bus”, the determination unit 107 determines that the second identification unit 111 performs the identification process on the image.
- the specified labelis “background”, the operator of the identification system 100 determines whether or not “car” or the like is included in the image.
- the determination unit 107sets a screen representing the image, the label “background”, and the first button 304 and the second button 305 described above. Is displayed on the display device 115.
- FIG. 6is a schematic diagram illustrating an example of a screen displayed on the display device 115 by the determination unit 107 in the third determination method.
- the determination unit 107determines, as illustrated in FIG. 6, the image 301 that is the identification target of the first identification unit 106 and a label A screen representing 302 and first button 304 and second button 305 is displayed on display device 115. On the screen displayed by the third determination method, “background” is displayed as the label 302.
- the first button 304 and the second button 305are the same as the first button 304 and the second button 305 shown in FIG.
- the image 301includes The car is shown. Therefore, the operator clicks the second button 305 using the mouse 116. If none of the car, motorcycle, and bus is shown in the image 301, the operator clicks the first button 304.
- the determination unit 107specifies the label “background”, but the image includes any of “car”, “motorcycle”, and “bus”. It is determined that the image is captured, and it is determined that the second identification unit 111 performs the identification process on the image.
- the determination unit 107does not show any of “car”, “motorcycle”, and “bus” in the image, and the label “ It is determined that the “background” is correct, and it is determined that the second identifying unit 111 does not execute the identification process on the image.
- the area correction GUI display control unit 108will be described. As described above, when the label defined for the image is other than “background”, the first identification unit 106 surrounds the object (“car”, “motorcycle” or “bus”) shown in the image. Determine the rectangular area. The area correction GUI display control unit 108 displays the image determined by the determination unit 107 to cause the second identification unit 111 to execute the identification processing on the display device 115 together with the rectangular area, and further corrects the rectangular area. Is displayed on the display device 115. However, since the label “background” is defined for the image determined by the above-described third method, the rectangular area is not determined. In this case, the area correction GUI display control unit 108 does not display the rectangular area.
- FIG. 7is a schematic diagram showing an example of a screen displayed on the display device 115 by the area correction GUI display control unit 108.
- a rectangular area 309 illustrated in FIG. 7is a rectangular area defined by the first identification unit 106 as an area surrounding “car” in the image 301.
- the area correction GUI display control unit 108includes a determination button 307 and a correction button 308 in the screen.
- the confirm button 307is a button for the operator to instruct to confirm the displayed rectangular area.
- the correction button 308is a button for the operator to instruct to accept the correction of the rectangular area 309.
- the rectangular area 309is appropriate as a rectangular area surrounding “car” in the image 301.
- the operatorclicks the OK button 307.
- the area extracting unit 109determines the rectangular area 309 in the image 301 at that time.
- FIG. 8is a schematic diagram showing another example of a screen displayed on the display device 115 by the area correction GUI display control unit 108.
- the rectangular area 309is not appropriate as a rectangular area surrounding “car” in the image 301.
- the area correction GUI display control unit 108accepts an appropriate rectangular area as a rectangular area surrounding “automobile” in accordance with the operation of the operator.
- the area correction GUI display control unit 108receives the correction of the positions of the vertices and sides of the rectangular area 309 in accordance with the operation performed by the operator using the mouse 116.
- the operatorcan correct the position of the vertices and sides to correct the rectangular area 309 to an appropriate position and size as illustrated in FIG.
- the area correction GUI display control unit 108receives such correction.
- the region extracting unit 109decides the rectangular region 309 in the image 301 at that time.
- the area extracting unit 109determines the rectangular area 309 after the correction.
- the area correction GUI display control unit 108does not display the rectangular area 309 on the screen illustrated in FIG.
- the area correction GUI display control unit 108displays a rectangular area 309 at an arbitrary size in an arbitrary place of the image 301, and responds to an operation performed by the operator using the mouse 116. Then, the correction of the positions of the vertices and sides of the rectangular area 309 is accepted. The operator corrects the displayed rectangular area 309 to an appropriate position and size surrounding the object shown in the image 301, and then clicks the OK button 307.
- the area extracting unit 109determines the rectangular area 309 in the image 301 at that time.
- the area extracting unit 109determines the rectangular area 309 in the image 301 at that time. Then, the area extracting unit 109 extracts the determined rectangular area from the image. This rectangular area is an area surrounding the object shown in the image.
- the region extraction unit 109represents the determined rectangular region in association with the image stored in the result storage unit 117, the label as the identification result by the first identification unit 106, and the reliability corresponding to the label. Information is also stored in the result storage unit 117.
- the information representing the rectangular areais, for example, the coordinates of each vertex of the rectangular area.
- the second identification unit 111identifies an object appearing in the image of the rectangular area with respect to the image of the rectangular area extracted by the area extracting unit 109.
- the second identification unit 111executes this process for each of the externally generated models stored in the second model storage unit 110.
- the second identification unit 111calculates the reliability of “automobile”, “motorcycle”, “bus”, and “background” by applying the extracted image of the rectangular area to the externally generated model. Then, the second identification unit 111 determines a label with the highest reliability among “automobile”, “motorcycle”, “bus”, and “background” as a label indicating an object appearing in the image. . In addition, the second identification unit 111 has already stored in the result storage unit 117 the reliability calculated for each label, the label indicating the object appearing in the image, and the reliability corresponding to the label. The result is stored in the result storage unit 117 in association with the image. The second identification unit 111 executes this process for each externally generated model.
- the result storage unit 117stores the image, the label determined by the first identification unit 106 performing the identification processing on the image, the reliability corresponding to the label, and the Information indicating a rectangular area is stored. Further, in association with the information, the reliability of each label obtained by the second identification unit 111 applying the image of the rectangular area to the externally generated model A, and the label having the highest reliability and the label The corresponding reliability, the reliability for each label obtained by applying the image of the rectangular area to the externally generated model B by the second identification unit 111, and the label having the highest reliability and the reliability corresponding to the label. The degree is also stored in the result storage unit 117.
- the result storage unit 117stores the set of information as described above.
- the image and a label determined by the first identifying unit 106 performing the identifying process on the imageare stored in the result storage unit 117, and information indicating a rectangular area in the image is not stored.
- the display control unit 112reads one set of information from the information stored in the result storage unit 117, and displays the image, the label derived by the first identification unit 106, the reliability corresponding to the label,
- the display unit 115displays on the display device 115 a screen including the label derived for each externally generated model by the second identification unit 111 and the reliability corresponding to the label.
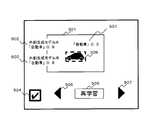
- FIG. 9is a schematic diagram showing an example of a screen displayed by the display control unit 112.
- the display control unit 112corresponds to the label derived by the first identification unit 106 and the reliability 501 corresponding to the label, and corresponds to the label derived by the second identification unit 111 using the externally generated model A and the label.
- a screen in which the reliability 502 and the label derived by the second identification unit 111 using the externally generated model B and the reliability 503 corresponding to the label are superimposed on the image 301is displayed on the display device 115.
- the display control unit 112also displays the determined rectangular area 309 so as to be superimposed on the image 301.
- the case where the number of the externally generated models stored in the second model storage unit 110 is twois illustrated, but the number of the externally generated models may be three or more.
- the display control unit 112further displays a check box 504, a re-learning button 505, and screen switching buttons 506 and 507 on this screen.
- the check box 504is a GUI for designating whether or not to include the image 301 displayed on the screen (more specifically, the image of the rectangular area 309 extracted from the image 301) in the teacher data.
- the check box 504is checked, it means that the image of the rectangular area 309 extracted from the image 301 is included in the teacher data. If the check box 504 is not checked, it means that the image 301 is not included in the teacher data.
- the display control unit 112may display the check box 504 in a state where the check box is checked in advance, according to the reliability derived using the externally generated model.
- the display control unit 112may display a checked state.
- the operatorcan check or uncheck the check box 504 by clicking the check box 504 with the mouse 116.
- the operatormay determine whether to include the image of the rectangular area 309 extracted from the image 301 in the teacher data by referring to the image 301 and the label and reliability derived for each externally generated model. Then, based on the determination, the operator may determine whether to check the check box 504.
- the screen switching buttons 506 and 507are buttons for switching to a screen displaying a different image. For example, when the screen switching button 506 is clicked, the display control unit 112 switches to a screen similar to the screen illustrated in FIG. 9 including an image preceding the image 301 in chronological order. Further, for example, when the screen switching button 507 is clicked, the display control unit 112 switches to a screen similar to the image illustrated in FIG. 9 that includes an image later than the image 301 in chronological order. The operator may determine whether or not to check the check box 504 on each of the switched screens.
- the re-learning button 505is a button for the operator to instruct the identification system 100 to re-learn the internally generated model.
- the integration unit 114specifies a label for each screen image in which the check box 504 is checked.
- the integration unit 114specifies the label of the image 301 illustrated in FIG.
- the attribute data storage unit 113stores data (attribute data) indicating the attributes of the camera 101 connected to the computer 102 (computer 102 shown in FIG. 3) including the attribute data storage unit 113, and stores the data in the second model storage unit 110.
- Thisis a storage device for storing the attribute data of the camera 101 of each identification system 100 (that is, each first identification system) that has generated each of the stored externally generated models.
- the attribute data of the camera 101 of the identification system 100 (first identification system) that has generated an externally generated modelis referred to as attribute data corresponding to the externally generated model.
- the attributes of the camera 101include an attribute of the camera 101 itself, an attribute depending on an environment in which the camera 101 is installed, and the like.
- the value of each attributeis represented by a numerical value.
- the value of each attributemay be determined in advance by the administrator of each identification system 100 according to the setting of the camera 101 and the installation environment.
- the attribute datais represented by a vector having such attribute values (numerical values) as elements.
- the attribute data of the camera 101includes at least “angle of view of the camera 101”, “whether the camera 101 is installed indoors or outdoors”, “photographing target of the camera 101”, and “ It includes the value of at least some of the attributes “moving direction”. Further, which attribute value is represented by a vector as attribute data is common to all the identification systems 100. Regarding which attribute value is a vector element, Common to the identification system 100. The numerical value of each element of the vector may be different for each identification system 100.
- the administratormay determine the numerical value representing the angle of view as a vector element.
- the value of this attributeis set to “0” and the camera 101 Is installed outdoors, the value of this attribute may be set to “1”.
- the attribute of “the object to be captured by the camera 101”for example, when the camera 101 is installed to capture an image of a vehicle (for example, when the camera 101 is installed toward a road), this attribute The value is set to “0”.
- the value of this attributeis set to “1”.
- the value of this attributeis set. Is set to “0.5”.
- a reference axis based on the main axis direction of the camera 101 and the likeis determined, and the angle between the reference axis and the main moving direction of the photographing target is defined as the value of this attribute It may be determined as
- attribute values other than the abovemay be included in the attribute data.
- values such as “the height of the installation location of the camera 101”, “depression angle of the camera 101”, and “resolution of the camera 101”may be included in the attribute data. Since “the height of the installation location of the camera 101”, “depression angle of the camera 101”, and “resolution of the camera 101” are all represented by numerical values, these numerical values may be determined as vector elements.
- the attribute data storage unit 113stores the attribute data (vector) of the camera 101 connected to the computer 102 (computer 102 shown in FIG. 3) including the attribute data storage unit 113. This attribute data is referred to as reference attribute data. Further, the attribute data storage unit 113 stores the attribute data of the camera 101 of each first identification system that has generated each externally generated model stored in the second model storage unit 110. In the present embodiment, the second model storage unit 110 stores the externally generated model A and the externally generated model B. Therefore, the attribute data storage unit 113 stores, in addition to the reference attribute data, attribute data corresponding to the externally generated model A (described as attribute data A) and attribute data corresponding to the externally generated model B (attribute data B and Note) is also stored.
- the attribute data Ais attribute data of the camera 101 of the first identification system that has generated the externally generated model A.
- the attribute data Bis attribute data of the camera 101 of the first identification system that has generated the externally generated model B.
- the administrator who manages each identification system 100may store the attribute data of the camera 101 in FIG. 3 in the attribute data storage unit 113 as reference attribute data. Further, the administrator sets the attribute data of the camera 101 of each of the two first identification systems defined for the identification system 100 shown in FIG. 3 in the attribute data storage unit 113 as attribute data A and attribute data B. What is necessary is just to memorize.
- the integration unit 114determines the reliability of each label (in the present embodiment, “car”, “motorcycle”, “bus”, “bus”) derived by the second identification unit 111 for each externally generated model for the image.
- the reliability of each "background”is integrated for each label, and the label of the image is specified based on the integration result.
- the integration unit 114includes the reference attribute data (that is, the attribute data of the camera 101 of the identification system 100 including the integration unit 114) and the plurality of first identification systems that have generated the externally generated model A and the externally generated model B. Is calculated for each of the first identification systems.
- the integration unit 114calculates the similarity between the reference attribute data and the attribute data A and the similarity between the reference attribute data and the attribute data B, respectively.
- the similarity between the reference attribute data and the attribute data Ais referred to as a similarity corresponding to the externally generated model A.
- the similarity between the reference attribute data and the attribute data Bis referred to as a similarity corresponding to the externally generated model B.
- Attribute datais represented by a vector.
- the integration unit 114may calculate the reciprocal of the distance between the two vectors as the similarity.
- the integration unit 114weights the reliability of each label derived for each externally generated model when the label is integrated for each label, with the similarity corresponding to the externally generated model, and integrates them.
- the integrating unit 114may specify the label having the highest reliability integration result as the image label.
- the integrating unit 114may calculate the product of Li and Wi for each externally generated model, and use the average value of the product as the integrated result of the reliability of the label of interest. The integration unit 114 performs the same operation for other labels. Then, the integration unit 114 specifies the label with the highest integration result as the label of the image.
- FIG. 10is an explanatory diagram showing a specific example of the first calculation method. It is assumed that there are two externally generated models A and B. The reliability of “car”, “motorcycle”, “bus”, and “background” derived using the externally generated model A is “0.1”, “0.7”, “0.1”, “ 0.1 ". It is also assumed that the similarity calculated for the externally generated model A is “0.9”.
- the integrating unit 114calculates a result obtained by multiplying the degree of similarity by “0.9” for each reliability. As a result, the multiplication results (product) of “0.09”, “0.63”, “0.09”, “0.09” for “car”, “motorcycle”, “bus”, and “background” respectively. Is obtained.
- the reliability of “car”, “motorcycle”, “bus” and “background” derived using the externally generated model Bare “0.1”, “0.6”, and “0.2”, respectively. , “0.1”. It is also assumed that the similarity calculated for the externally generated model B is “0.8”.
- the integrating unit 114calculates a result of multiplying the degree of similarity “0.8” for each of the above degrees of reliability. As a result, the multiplication results (product) of “0.08”, “0.48”, “0.16”, “0.08” for “car”, “motorcycle”, “bus”, and “background” respectively. Is obtained.
- the integration unit 114calculates an average value of the multiplication results (products) obtained for each of the “car”, “motorcycle”, “bus”, and “background”.
- the average values calculated for each of "car”, “motorcycle”, “bus” and “background”are "0.085”, “0.555”, “0.125”, and "0.085”. Therefore, the integrating unit 114 specifies “motorcycle” having the highest average value (integrated result) as the image label.
- the reliability of the label of interest obtained using the i-th externally generated modelis Li.
- the similarity calculated for the i-th externally generated modelis Wi.
- the sum of the individual similarities calculated for the individual externally generated modelsis Wt.
- the number of externally generated models stored in the second model storage unit 110is N.
- the integrating unit 114may calculate Wt by the calculation of the following equation (2).
- the integrating unit 114may integrate the reliability of the label of interest by calculating the following expression (3).
- the integration unit 114calculates, for each externally generated model, the ratio of the similarity corresponding to the externally generated model to the sum of the similarities, and uses the calculation result of the ratio as a weight to determine the reliability of the label of interest.
- the weighted summay be calculated, and the calculation result may be used as the integrated result of the reliability of the label of interest.
- the integration unit 114performs the same operation for other labels. Then, the integration unit 114 specifies the label with the highest integration result as the label of the image.
- the ratio of the similarity “0.9” corresponding to the externally generated model A to the total similarity “1.7”is “0.9 / 1.7”.
- the ratio of the similarity “0.8” corresponding to the externally generated model B to the total similarity “1.7”is “0.8 / 1.7”.
- the integrating unit 114calculates a weighted sum of reliability for each label, using “0.9 / 1.7” and “0.8 / 1.7” as weights, and uses the calculation result as the reliability of the label. And the integration result. Then, the integration results of “car”, “motorcycle”, “bus”, and “background” are “0.0999”, “0.6528”, “0.1470”, and “0.0999”. Therefore, the integration unit 114 specifies the “motorcycle” having the highest integration result as the image label.
- Each of the first and second calculation methodsis a calculation in which the reliability of the label derived for each externally generated model is weighted by the similarity corresponding to the externally generated model and integrated. .
- the learning unit 103extracts a fixed rectangular area in the image, and integrates the rectangular area image with the image of the rectangular area.
- the pair with the label specified by the unit 114is included in the existing teacher data.
- the learning unit 103uses the teacher data to re-learn the internally generated model by deep learning. Further, the learning unit 103 updates the existing internally generated model stored in the first model storage unit 104 to a new internally generated model generated by re-learning.
- the model transmitting unit 122transmits the model learned by the learning unit 103 to a predetermined second identification system.
- the number of the second identification system to which the model is transmittedmay be one or plural.
- the second identification systemstores the received model as an externally generated model.
- model transmission unit 122transmits a model to the second identification system
- four model transmission modeswill be described as examples.
- the model transmission unit 122transmits the model to the second identification system.
- the model transmission unit 122transmits a model newly obtained by the re-learning to the second identification system. Therefore, in the first model transmission mode, the model transmission unit 122 can transmit the latest model to the second identification system.
- the model transmission unit 122periodically transmits the model stored in the first model storage unit 104 to the second identification system. That is, the model transmission unit 122 stores the model stored in the first model storage unit 104 in the first model storage unit 104 again after a certain period of time has elapsed after transmitting the model to the second identification system. And transmitting the model to the second identification system. Even if the model stored in the first model storage unit 104 has been updated a plurality of times during this fixed period, the model transmission unit 122 will continue to operate the first model storage at the time when the fixed period has elapsed since the previous model transmission. The model stored in the storage unit 104 is transmitted to the second identification system. If the model stored in the first model storage unit 104 has not been updated during this fixed period, the model transmission unit 122 retransmits the same model as the previously transmitted model. Become.
- the model transmission unit 122determines whether to transmit the model to the second identification system.
- the image to be specified by the integrating unit 114 as a labelis determined by the determining unit 107 of the images identified by the first identifying unit 106 by the first determining method, the second determining method, or the second determining method. It is an image determined to cause the second identification unit 111 to execute the identification process by the determination method of No. 3. That is, the image that the integrating unit 114 specifies as a label is an image that has been erroneously identified by the first identification unit 106 or has not obtained a reliability higher than the threshold. Before the learning unit 103 re-learns the model, the integration unit 114 specifies the label of such an image by using the reliability of each label obtained for each externally generated model.
- the learning unit 103when the learning unit 103 re-learns a model (internally generated model), the first identification unit 106 applies the image to the re-learned model, thereby obtaining the image. Is derived again.
- the model transmitting unit 122uses the model re-learned by the first identifying unit 106 to again derive the identification result (label) of the image and the label specified by the integrating unit 114. Then, it is determined that the relearned model is to be transmitted to the second identification system, and the relearned model is transmitted to the second identification system. On the other hand, when the two labels do not match, the model transmission unit 122 determines that the relearned model is not transmitted to the second identification system, and does not transmit the model to the second identification system.
- the model transmission unit 122determines whether to transmit the model to the second identification system as described above. To the second identification system.
- the integration unit 114specifies the label of the image by using the reliability of each label obtained for each externally generated model. Therefore, it is considered that the accuracy of the label specified by the integration unit 114 is high even if the image has been erroneously identified by the first identification unit 106 or has not obtained a reliability higher than the threshold. Therefore, the fact that the identification result (label) of the image derived again by using the model re-learned by the first identification unit 106 and the label specified by the integration unit 114 coincides with each other means that It can be said that the identification accuracy of the model obtained by learning is higher than the identification accuracy of the model before relearning.
- the model obtained by the relearningis transmitted to the second identification system. It can be said that the transmission mode is used. Further, in the third model transmission mode, if the model before re-learning cannot obtain a correct identification result, but the model obtained by re-learning can obtain a correct identification result, It can also be said that the model obtained by learning is transmitted to the second identification system.
- the model transmission unit 122determines whether the model transmission unit 122 transmits the model to the second identification system. Is determined.
- the model transmission modewhen the model is relearned, the model transmission is performed within a predetermined time based on the accuracy rate of the identification result (label) derived by the first identification unit 106 using the model.
- the unit 122determines whether to send the model to the second identification system.
- the accuracy rateis equal to or greater than a predetermined threshold
- the model transmitting unit 122determines that the relearned model is to be transmitted to the second identification system, and transmits the model to the second identification system.
- the accuracy rateis less than the threshold
- the model transmitting unit 122determines that the relearned model is not transmitted to the second identification system, and does not transmit the model to the second identification system.
- the number of times the first button 304 is clickedcan be said to be the number of times that the label derived by the first identification unit 106 is correct.
- the model transmission unit 122calculates the ratio of the number of times the first button 304 is clicked to the number of times the determination unit 107 displays the screen illustrated in FIG. 5 within a predetermined time, The result may be the correct answer rate. Then, the model transmission unit 122 may determine whether to transmit the re-learned model to the second identification system as described above by comparing the accuracy rate with the threshold.
- the model updating unit 121 and the model transmitting unit 122are realized by, for example, a CPU (Central Processing Unit) of the computer 102 operating according to the model providing program and a communication interface of the computer 102.
- the CPUmay read the model providing program from a program recording medium such as a program storage device of the computer 102 and operate as the model updating unit 121 and the model transmitting unit 122 using the communication interface according to the model providing program.
- the learning unit 103, the first identification unit 106, the determination unit 107, the area correction GUI display control unit 108, the area extraction unit 109, the second identification unit 111, the display control unit 112, and the integration unit 114This is realized by the CPU of the computer 102 that operates according to the provided program.
- the CPUreads the model providing program from a program recording medium such as a program storage device of the computer 102, and according to the model providing program, the learning unit 103, the first identification unit 106, the determination unit 107, the area correction GUI display control unit 108 , The region extraction unit 109, the second identification unit 111, the display control unit 112, and the integration unit 114.
- the first model storage unit 104, the second model storage unit 110, the attribute data storage unit 113, and the result storage unit 117are realized by a storage device included in the computer 102.
- FIG. 12is a flowchart illustrating an example of processing progress from the time when the camera 101 captures an image to the time when the second identification unit 111 performs an identification process on an image. The detailed description of the operation already described is omitted.
- the learning unit 103has previously learned the internally generated model by deep learning, and has stored the internally generated model in the first model storage unit 104.
- the model updating unit 121receives a model from each of a plurality of first identification systems predetermined for the identification system 100 shown in FIG. 3, and stores the model as an externally generated model in a second model storage. It is assumed that the information is stored in the unit 110. That is, it is assumed that the second model storage unit 110 stores the models learned by the individual first identification systems as externally generated models. Note that, when a new model is received from the first identification system, the model updating unit 121 stores the model already stored in the second model storage unit 110 as a model learned by the first identification system. May be updated to the newly received model.
- the camera 101obtains an image by photographing at the installation location of the camera 101 (step S1).
- the camera 101transmits the image to the computer 102.
- the first identification unit 106 of the computer 102receives the image via the data acquisition unit 105. Then, the first identification unit 106 identifies the object shown in the image by applying the image to the internally generated model (Step S2). In step S2, the first identification unit 106 derives a label representing the object appearing in the image and the reliability of the label. The first identification unit 106 stores the image in the result storage unit 117 in association with the derived label and reliability. When the specified label is not “background”, the first identification unit 106 determines a rectangular area surrounding the object shown in the image.
- the determination unit 107determines whether or not to cause the second identification unit 111 to execute an identification process on the image identified by the first identification unit 106 in step S2 (step S3). When it is determined that the second identification unit 111 does not execute the identification processing (No in step S3), the processing after step S1 is repeated.
- the area correction GUI display control unit 108displays an image on the display device 115.
- the area correction GUI display control unit 108displays the screens illustrated in FIGS. 7 and 8 on the display device 115.
- the region extracting unit 109determines a rectangular region surrounding the object shown in the image in accordance with the operation of the operator on the screen, and extracts the rectangular region from the image (step S4).
- the second identification unit 111identifies an object appearing in the image of the rectangular area extracted in step S4 for each of the externally generated models stored in the second model storage unit 110 in advance. (Step S5).
- the second identification unit 111derives the reliability of each label (“car”, “motorcycle”, “bus”, and “background”) for each externally generated model.
- the result storage unit 117stores the reliability of each label derived for each externally generated model.
- the second identification unit 111also causes the result storage unit 117 to store, for each externally generated model, a pair of the label having the highest reliability and the reliability corresponding to the label. The label with the highest reliability indicates an object determined to be present in the image.
- step S5the processes after step S1 are repeated.
- FIG. 13is a flowchart showing an example of processing progress when a model (internally generated model) is re-learned and the model is transmitted to the second identification system. In the following description, a detailed description of the operation already described is omitted. In FIG. 13, the above-described “first model transmission mode” will be described as an example.
- the display control unit 112determines the label derived by the first identification unit 106 and the reliability corresponding to the label, and the label derived by the second identification unit 111 for each externally generated model and the reliability corresponding to each label.
- a screen in which the degree is superimposed on the imageis displayed on the display device 115 (step S11).
- the display control unit 112includes a check box 504, a re-learning button 505, and screen switching buttons 506 and 507 in this screen.
- the display control unit 112displays, for example, a screen illustrated in FIG.
- the operatorchecks the screen illustrated in FIG. 9 and determines whether or not to include the displayed image 301 (more specifically, the image of the rectangular area 309 determined in the image 301) in the teacher data. .
- the operatorspecifies that the displayed image 301 is to be included in the teacher data. That is, the image displayed on the screen with the check box 504 checked is the image specified as the image to be included in the teacher data.
- the integration unit 114calculates the similarity between the reference attribute data and each attribute data corresponding to each externally generated model (step S12).
- the attribute datais represented by a vector.
- the integration unit 114may calculate the reciprocal of the distance between the two vectors as the similarity.
- the integration unit 114integrates the reliability of the labels derived for each of the externally generated models using the similarities calculated in step S12. The integrating unit 114 performs this process for each label, and identifies the label with the highest reliability integration result as the label for the image to be included in the teacher data (step S13).
- the integrating unit 114executes the process of step S13 for each of the images.
- the learning unit 103extracts a determined rectangular area in the image to be included in the teacher data, and includes a set of the image of the rectangular area and the label specified by the integration unit 114 in the existing data. Then, using the teacher data, the learning unit 103 re-learns the internally generated model by deep learning, and stores the internally generated model obtained by the re-learning in the first model storage unit 104 (step S14). The learning unit 103 updates the existing internally generated model stored in the first model storage unit 104 to a new internally generated model generated by re-learning.
- the first identification unit 106uses a new internally generated model generated by relearning.
- step S14the model transmitting unit 122 transmits the model (internally generated model) relearned in step S14 to the second identification system (step S15).
- Each identification system 100has a similar configuration.
- the model updating unit 121 of the second identification systemupdates the model stored in the second model storage unit 110 in the second identification system to the received model. I do. Therefore, the model transmitted by the model transmitting unit 122 to the second identification system in step S15 is stored as an externally generated model in the second identification system.
- the “first model transmission mode”has been described as an example.
- the computer 102may end the process in step S14.
- the model transmission unit 122may periodically transmit the model stored in the first model storage unit 104 to the second identification system, separately from the processing in steps S11 to S14.
- FIG. 14is a flowchart showing an example of the processing progress of the above-mentioned “third model transmission mode”.
- the processing up to step S14is the same as that in the flowchart shown in FIG. 13, and a description thereof will be omitted.
- the first identification unit 106uses the label of the image (see FIG. 9) displayed in the screen with the check box 504 checked, using the internally generated model relearned in step S14. (Step S21).
- the image displayed on the screen with the check box 504 checkedis an image specified by the operator to be included in the teacher data.
- the model transmission unit 122determines whether or not the label derived in step S21 matches the label identified by the integration unit 114 in step S13 (see FIG. 13) for the same image (step S21). S22).
- step S22If the two labels match (Yes in step S22), the model transmitting unit 122 determines that the model (internally generated model) retrained in step S14 (see FIG. 13) is to be transmitted to the second identification system, The model is transmitted to the second identification system (Step S23).
- the model transmitting unit 122determines that the model re-learned in step S14 is not to be transmitted to the second identification system, and ends the process.
- FIG. 15is a flowchart showing an example of the processing progress of the “fourth model transmission mode” described above.
- the processing up to step S14is the same as that in the flowchart shown in FIG. 13, and a description thereof will be omitted.
- the model transmission unit 122calculates the correct answer rate of the image identification result when the re-learned model (internally generated model) is used within a predetermined time (step S31). Since the calculation example of the correct answer rate has already been described, the description is omitted here.
- step S32the model transmitting unit 122 determines whether or not the correct answer rate calculated in step S31 is equal to or greater than a predetermined threshold.
- the model transmitting unit 122determines that the model (internally generated model) retrained in step S14 (see FIG. 13) is to be transmitted to the second identification system. , And transmits the model to the second identification system (step S33).
- the model transmitting unit 122determines that the model re-learned in step S14 is not transmitted to the second identification system, and ends the process.
- the determination unit 107determines that the first identification unit 106 performs the identification process by at least one of the first determination method, the second determination method, and the third determination method described above. It is determined whether or not to cause the second identification unit 111 to execute the identification processing on the target image. Therefore, the image for which the identification processing is performed by the second identification unit 111 is an image in which the label determined by the first identification unit 106 is incorrect, and the reliability corresponding to the label determined for the image is a threshold. The following image or an image in which an object (“automobile”, “motorcycle” or “bus”) is captured despite the label determined by the first identification unit 106 being “background” is there.
- such an imageis generated by using a model different from the internally generated model (more specifically, a model generated by a first identification system predetermined for the identification system 100 of interest. (Externally generated model)), a pair of a label specified based on the result of applying the image and the image is added to the existing teacher data, and the learning unit 103 re-learns the internally generated model. Therefore, the identification accuracy of the internally generated model can be improved.
- a model different from the internally generated modelmore specifically, a model generated by a first identification system predetermined for the identification system 100 of interest. (Externally generated model)
- a pair of a label specified based on the result of applying the image and the imageis added to the existing teacher data, and the learning unit 103 re-learns the internally generated model. Therefore, the identification accuracy of the internally generated model can be improved.
- the model transmitting unit 122transmits the model learned by the learning unit 103 to, for example, the first model transmitting mode, the second model transmitting mode, the third model transmitting mode, or the fourth model transmitting mode.
- the datais transmitted to a predetermined second identification system.
- the model updating unit 121stores the received model in the second model storage unit 110 as an externally generated model. Therefore, each identification system 100 can relearn its own model so as to improve the identification accuracy of its own model, and can contribute to the improvement of the identification accuracy of the models of other identification systems 100. it can.
- the region extracting unit 109determines a rectangular region surrounding the object shown in the image, and extracts the rectangular region from the image. I do. Then, the second identification unit 111 identifies an object appearing in the extracted image of the rectangular area for each externally generated model. The second identification unit 111 performs a process of identifying an object appearing in the image not on the extracted image of the rectangular area but on the entire one image that has been processed by the first identification unit 106. You may. In this case, the identification system 100 (see FIG. 3) does not have to include the area correction GUI display control unit 108 and the area extraction unit 109. And the identification system 100 does not need to perform step S4 (see FIG. 12). The second identification unit 111 only needs to identify an object in the image in step 5 with respect to one entire image processed by the first identification unit 106.
- the learning unit 103only needs to include the entire set of one image and the label specified by the integration unit 114 in existing teacher data, and re-learn the internally generated model using the teacher data.
- the learning unit 103may re-learn an internally generated model by deep learning using a set of an image and a label specified by the integration unit 114 and an existing internally generated model as teacher data.
- the second model storage unit 110may store one externally generated model.
- the learning unit 103includes the pair of the image and the label with the highest reliability derived by the second identification unit 111 in the existing teacher data, and uses the teacher data to generate the internally generated model. Should be re-learned.
- FIG. 16is a schematic block diagram illustrating a configuration example of a computer 102 included in an identification system 100 according to an embodiment of the present invention or a modified example thereof.
- a computeris represented by a reference numeral “1000”.
- the computer 1000includes an interface between a CPU 1001, a main storage device 1002, an auxiliary storage device 1003, an interface 1004, a display device 1005, an input device 1006, a communication interface 1007, and a data collection unit 101 (for example, a camera). 1008.
- the operation of the computer included in the identification system 100is stored in the auxiliary storage device 1003 in the form of a model providing program.
- the CPU 1001reads the model providing program from the auxiliary storage device 1003 and expands the program on the main storage device 1002. Then, the CPU 1001 executes the processing of the computer 102 (see FIG. 3) in the above-described embodiment and its modifications according to the model providing program.
- the auxiliary storage device 1003is an example of a non-transitory tangible medium.
- Other examples of non-transitory tangible mediainclude a magnetic disk, a magneto-optical disk, a CD-ROM (Compact Disk Read Only Memory), a DVD-ROM (Digital Versatile Disk Read Only Memory) connected via the interface 1004, A semiconductor memory and the like are included.
- the programWhen the program is distributed to the computer 1000 via a communication line, the computer 1000 that has received the program may load the program into the main storage device 1002 and execute the above processing.
- the programmay be for realizing a part of the processing of the computer 102 shown in the embodiment and its modified example. Furthermore, the program may be a difference program that implements the above-described processing in combination with another program already stored in the auxiliary storage device 1003.
- Some or all of the componentsmay be realized by a general-purpose or dedicated circuit (processor), a processor, or a combination thereof. These may be configured by a single chip, or may be configured by a plurality of chips connected via a bus. Some or all of the components may be realized by a combination of the above-described circuit and the like and a program.
- processorgeneral-purpose or dedicated circuit
- processorprocessor
- a combination thereofmay be configured by a single chip, or may be configured by a plurality of chips connected via a bus.
- Some or all of the componentsmay be realized by a combination of the above-described circuit and the like and a program.
- the plurality of information processing devices, circuits, and the likemay be centrally arranged or may be distributed.
- the information processing device, the circuit, and the likemay be realized as a form in which each is connected via a communication network, such as a client and server system or a cloud computing system.
- FIG. 17is a block diagram showing an outline of the identification system of the present invention.
- the identification system according to the present inventionincludes a learning unit 701, a first model storage unit 702, a first identification unit 703, a second model storage unit 704, a model update unit 705, and a second identification unit 706. And a model transmitting unit 707.
- the learning unit 701(for example, the learning unit 103) learns a model for identifying an object represented by data (for example, an image) using teacher data.
- the first model storage unit 702(first model storage unit 104) stores the model learned by the learning unit 701.
- the first identification unit 703(for example, the first identification unit 106) identifies an object represented by data using the model learned by the learning unit 701.
- the second model storage unit 704(for example, the second model storage unit 110) stores the individual models learned by the plurality of first identification systems determined in advance.
- the model updating unit 705(for example, the model updating unit 121) receives a model learned by the first identification system from the first identification system, the model updating unit 705 stores the model stored in the second model storage unit 704. The model learned by the first identification system is updated to the model received from the first identification system.
- the second identification unit 706determines whether the first identification unit 703 is an identification target for each model stored in the second model storage unit 704. The object represented by the set data is identified.
- the learning means 701re-learns the model using the label for the data determined based on the identification result derived by the second identification means 706 and the teacher data including the data, and stores the model in the first model storage means 702. Update the stored model with the retrained model.
- the model transmitting unit 707(for example, the model transmitting unit 122) transmits the model learned by the learning unit 701 to one or a plurality of predetermined second identification systems.
- the identification system of the present inventioncan re-learn its own model so as to improve the identification accuracy of its own model, and also contributes to the improvement of the identification accuracy of the models of other identification systems. can do.
- the model transmitting means 707may be configured to transmit the model to the second identification system when the learning means 701 re-learns the model.
- the model transmitting unit 707may periodically transmit the model stored in the first model storing unit 702 to the second identification system.
- the second identification unit 706integrates the identification results derived for each model stored in the second model storage unit 704 to identify the label for the data to be identified by the first identification unit 703.
- the learning unit 701re-learns the model using the teacher data including the label specified by the integrating unit and the data, and the model transmitting unit 707 performs When the identification result of the data derived by the first identifying means 703 using the relearned model matches the label for the data identified by the integrating means, the relearned model is assigned to the second learning means. It may be configured to transmit to the identification system.
- the model transmission unit 707determines that the accuracy rate of the identification result derived by the first identification unit 703 using the model within a predetermined time period is equal to or greater than a predetermined threshold value. , The model may be transmitted to the second identification system.
- the present inventionis suitably applied to an identification system that identifies an object represented by data by applying the data to a model.
- REFERENCE SIGNS LIST100 identification system 101 data collection unit 102 computer 103 learning unit 104 first model storage unit 105 data acquisition unit 106 first identification unit 107 determination unit 108 region correction GUI display control unit 109 region extraction unit 110 second model storage unit 111 second identification unit 112 display control unit 113 attribute data storage unit 114 integration unit 115 display device 116 mouse 117 result storage unit 121 model update unit 122 model transmission unit
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computing Systems (AREA)
- General Engineering & Computer Science (AREA)
- Mathematical Physics (AREA)
- Software Systems (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Image Analysis (AREA)
Abstract
Description
Translated fromJapanese本発明は、データをモデルに適用することによって、そのデータが表わす物体を識別する識別システム、並びに、その識別システムが他の識別システムにモデルを提供するモデル提供方法およびモデル提供プログラムに関する。The present invention relates to an identification system for identifying an object represented by data by applying the data to the model, and a model providing method and a model providing program for the identification system to provide a model to another identification system.
一般的な識別システムの例を以下に説明する。一般的な識別システムは、その識別システムが備えているカメラが撮影によって得た画像と、その画像に写っている物体を表したラベルとの組を教師データとして、機械学習によってモデルを予め学習する。そして、その一般的な識別システムは、カメラが撮影によって新たに得た画像をそのモデルに適用することによって、その画像に写っている物体を識別する。例 An example of a general identification system will be described below. A general identification system learns a model in advance by machine learning using, as teacher data, a set of an image obtained by photographing with a camera included in the identification system and a label representing an object appearing in the image. . Then, the general identification system identifies an object shown in the image by applying an image newly obtained by photographing by the camera to the model.
このような一般的な識別システムは、不審な車両や不審な人物を検出し、犯罪等を未然に防ぐ目的で用いられたり、白杖または車椅子の使用者を検出し、白杖または車椅子の使用者を誘導する等の支援の目的で用いられたりする。Such a general identification system is used for the purpose of detecting a suspicious vehicle or a suspicious person, preventing crime, etc., detecting a user using a white stick or a wheelchair, and using a white stick or a wheelchair. It is used for the purpose of support such as guiding people.
ここでは、画像に写っている物体を識別する識別システムを例にして説明したが、一般的な識別システムとして、音声データが表わす物体を識別する識別システムも考えられる。以下、画像に写っている物体を識別する識別システムを例にして説明する。Here, the identification system for identifying an object appearing in an image has been described as an example, but an identification system for identifying an object represented by voice data is also conceivable as a general identification system. Hereinafter, an identification system for identifying an object appearing in an image will be described as an example.
なお、特許文献1には、撮像環境の違いによる追加学習の長期化を回避する画像認識方法が記載されている。特許文献1に記載の画像認識方法は、複数のカメラ装置を含むカメラシステムにおける画像認識方法である。そして、特許文献1に記載の画像認識方法では、第1カメラ装置から、第1画像および第1撮像環境情報を取得する。そして、各カメラ装置が過去に画像を撮像した際の各撮像環境を示す撮像環境情報と、その各撮像環境に対応する各検出器関数を示す各認識制御パラメータとを管理するパラメータテーブルを用いて、第1撮像環境情報に示される第1撮像環境と同一または類似の撮像環境に対応する第1検出器関数を示す第1認識制御パラメータを選択する。そして、第1認識制御パラメータで示された第1検出器関数を用いて、第1カメラ装置から取得した第1画像を認識する。In addition,
また、特許文献2には、画像監視装置が記載されている。特許文献2に記載の画像監視装置は、検出された顔特徴点を用いて顔領域の正規化を行うとともに、人物の辞書との照合を行う。特許 Further,
前述の一般的な識別システムが複数台設けられ、各識別システムのカメラが各地に設置されることが考えられる。複数 It is conceivable that a plurality of the above-mentioned general identification systems are provided, and cameras of each identification system are installed in various places.
ここで、1台のカメラが撮影によって得た画像における物体の写り方に、偏りが生じる場合がある。例えば、ある1台のカメラは、そのカメラから見て右側から左側への方向に進行する自動車を撮影する機会が多いが、その逆方向に進行する自動車を撮影する機会が少ないとする。この場合、右側から左側への方向に進行する自動車が写った画像は多く得られるが、その逆方向に進行する自動車が写った画像は少ししか得られない。すると、教師データには、右側から左側への方向に進行する自動車が写った画像が多く含まれ、その逆方向に進行する自動車が写った画像は少ししか含まれない。その結果、教師データを用いて機械学習によって得たモデルに、右側から左側への方向に進行する自動車が写った画像を適用した場合には、識別システムは高い精度で自動車を識別するが、逆方向に進行する自動車が写った画像をそのモデルに適用した場合の自動車の識別精度は低くなる。Here, there is a case where a bias occurs in how an object is captured in an image obtained by one camera by shooting. For example, it is assumed that one camera has many opportunities to photograph a car traveling from right to left as viewed from the camera, but has few opportunities to photograph a car traveling in the opposite direction. In this case, many images of a car traveling in the right-to-left direction are obtained, but only a few images of a car traveling in the opposite direction are obtained. Then, the teacher data includes many images of vehicles traveling in the right-to-left direction, and includes only a few images of vehicles traveling in the opposite direction. As a result, when an image of a car traveling from right to left is applied to a model obtained by machine learning using teacher data, the identification system identifies the car with high accuracy. When an image of an automobile traveling in the direction is applied to the model, the accuracy of identifying the automobile decreases.
各地に配置されるそれぞれの識別システムにおいて、データが表わす物体を識別するためのモデルの識別精度が向上することが好ましい。に お い て In each of the identification systems located in various places, it is preferable that the identification accuracy of the model for identifying the object represented by the data is improved.
そこで、本発明は、自身のモデルの識別精度を向上させるように、自身のモデルを学習し直すことができ、また、他の識別システムのモデルの識別精度向上に寄与することができる識別システム、モデル提供方法およびモデル提供プログラムを提供することを目的とする。Therefore, the present invention provides an identification system that can re-learn its own model so as to improve the identification accuracy of its own model, and can also contribute to improving the identification accuracy of models of other identification systems, It is an object to provide a model providing method and a model providing program.
本発明による識別システムは、データが表わす物体を識別するためのモデルを、教師データを用いて学習する学習手段と、学習手段によって学習されたモデルを記憶する第1のモデル記憶手段と、学習手段によって学習されたモデルを用いて、データが表わす物体を識別する第1の識別手段と、予め定められた複数の第1の識別システムで学習された個々のモデルをそれぞれ記憶する第2のモデル記憶手段と、第1の識別システムから当該第1の識別システムで学習されたモデルを受信した場合に、第2のモデル記憶手段に記憶されているその第1の識別システムで学習されたモデルを、その第1の識別システムから受信したモデルに更新するモデル更新手段と、所定の場合に、第2のモデル記憶手段に記憶されている個々のモデル毎に、第1の識別手段が識別対象としたデータが表わす物体を識別する第2の識別手段とを備え、学習手段が、第2の識別手段が導出した識別結果に基づいて定まるデータに対するラベルと、そのデータとを含む教師データを用いて、モデルを再学習し、第1のモデル記憶手段に記憶されているモデルを再学習したモデルに更新し、学習手段によって学習されたモデルを、予め定められた1つまたは複数の第2の識別システムに送信するモデル送信手段を備えることを特徴とする。An identification system according to the present invention includes: learning means for learning a model for identifying an object represented by data using teacher data; first model storage means for storing a model learned by the learning means; First identifying means for identifying an object represented by data using a model learned by the first and second model storages for storing individual models learned by a plurality of predetermined first identification systems, respectively. Means, when a model learned by the first identification system is received from the first identification system, the model learned by the first identification system stored in the second model storage means is Model updating means for updating to a model received from the first identification system; and, in a predetermined case, for each model stored in the second model storage means, A second identification means for identifying an object represented by the data identified by the first identification means; a learning means comprising: a label for data determined based on an identification result derived by the second identification means; Is re-learned using the teacher data including the following, the model stored in the first model storage unit is updated to the re-learned model, and the model learned by the learning unit is set to a predetermined one. And a model transmitting means for transmitting to one or more second identification systems.
また、本発明によるモデル提供方法は、データが表わす物体を識別するためのモデルを、教師データを用いて学習し、モデルを第1のモデル記憶手段に記憶させ、第1のモデル記憶手段に記憶されているモデルを用いて、データが表わす物体を識別する第1の識別処理を実行し、予め定められた複数の第1の識別システムで学習された個々のモデルをそれぞれ第2のモデル記憶手段に記憶させ、第1の識別システムから当該第1の識別システムで学習されたモデルを受信した場合に、第2のモデル記憶手段に記憶されているその第1の識別システムで学習されたモデルを、その第1の識別システムから受信したモデルに更新し、所定の場合に、第2のモデル記憶手段に記憶されている個々のモデル毎に、第1の識別処理で識別対象としたデータが表わす物体を識別する第2の識別処理を実行し、第2の識別処理で導出した識別結果に基づいて定まるデータに対するラベルと、そのデータとを含む教師データを用いて、モデルを再学習し、第1のモデル記憶手段に記憶されているモデルを再学習したモデルに更新し、第1のモデル記憶手段に記憶されているモデルを、予め定められた1つまたは複数の第2の識別システムに送信することを特徴とする。Further, in the model providing method according to the present invention, a model for identifying an object represented by data is learned using teacher data, the model is stored in the first model storage unit, and the model is stored in the first model storage unit. Executing a first identification process for identifying an object represented by data using the model that has been performed, and storing individual models learned by a plurality of predetermined first identification systems in a second model storage means. When a model learned by the first identification system is received from the first identification system, the model learned by the first identification system stored in the second model storage means is stored in the second model storage unit. The model is updated to the model received from the first identification system, and in a predetermined case, for each model stored in the second model storage means, the data to be identified in the first identification process is determined. Executing a second identification process for identifying an object represented by the data, and re-learning the model using a label for data determined based on the identification result derived in the second identification process and teacher data including the data. Then, the model stored in the first model storage unit is updated to the relearned model, and the model stored in the first model storage unit is replaced with one or more predetermined second identifications. The data is transmitted to the system.
また、本発明によるモデル提供プログラムは、コンピュータに、データが表わす物体を識別するためのモデルを、教師データを用いて学習し、モデルを第1のモデル記憶手段に記憶させる学習処理、第1のモデル記憶手段に記憶されているモデルを用いて、データが表わす物体を識別する第1の識別処理、予め定められた複数の第1の識別システムで学習された個々のモデルをそれぞれ第2のモデル記憶手段に記憶させる処理、第1の識別システムから当該第1の識別システムで学習されたモデルを受信した場合に、第2のモデル記憶手段に記憶されているその第1の識別システムで学習されたモデルを、その第1の識別システムから受信したモデルに更新するモデル更新処理、所定の場合に、第2のモデル記憶手段に記憶されている個々のモデル毎に、第1の識別処理で識別対象としたデータが表わす物体を識別する第2の識別処理、第2の識別処理で導出した識別結果に基づいて定まるデータに対するラベルと、そのデータとを含む教師データを用いて、モデルを再学習し、第1のモデル記憶手段に記憶されているモデルを再学習したモデルに更新する再学習処理、および、第1のモデル記憶手段に記憶されているモデルを、予め定められた1つまたは複数の第2の識別システムに送信するモデル送信処理を実行させることを特徴とする。In addition, the model providing program according to the present invention is a learning process for causing a computer to learn a model for identifying an object represented by data using teacher data, and to store the model in a first model storage unit. A first identification process for identifying an object represented by data using a model stored in the model storage means, and individual models learned by a plurality of predetermined first identification systems are respectively assigned to a second model. Processing to be stored in the storage means; when a model learned by the first identification system is received from the first identification system, the model is learned by the first identification system stored in the second model storage means. Model updating processing for updating the model that has been updated to the model received from the first identification system, and in a predetermined case, the individual model stored in the second model storage means. For each model, a second identification process for identifying an object represented by data to be identified in the first identification process, a label for data determined based on an identification result derived in the second identification process, and the data A re-learning process for re-learning the model using the included teacher data and updating the model stored in the first model storage unit to the re-learned model, and stored in the first model storage unit A model transmission process for transmitting the model to one or more predetermined second identification systems is performed.
本発明によれば、自身のモデルの識別精度を向上させるように、自身のモデルを学習し直すことができ、また、他の識別システムのモデルの識別精度向上に寄与することができる。According to the present invention, it is possible to re-learn the own model so as to improve the identification accuracy of the own model, and to contribute to the improvement of the identification accuracy of the model of another identification system.
以下、本発明の実施形態を図面を参照して説明する。Hereinafter, embodiments of the present invention will be described with reference to the drawings.
図1は、本発明の識別システムが複数設けられている状況を示す模式図である。図1では、6個の識別システム100が各所に設けられている場合を例示しているが、各所に設けられる識別システム100の数は、特に限定されない。本実施形態では、複数の識別システム100が同様の構成であるものとして説明する。FIG. 1 is a schematic diagram showing a situation where a plurality of identification systems of the present invention are provided. FIG. 1 illustrates a case where six
各識別システム100は、例えば、通信ネットワークを介して、通信可能である。Each
個々の識別システム100はそれぞれ、データ収集部(後述の図3に示すデータ収集部101)を備える。各識別システム100のデータ収集部(図1において図示略。後述の図3を参照。)は、データを収集する各地に設置される。データ収集部は、データ収集部の設置場所におけるデータを収集する。例えば、データ収集部は、設置場所において画像や音声データを収集する。データ収集部は、カメラやマイクロホンによって実現される。例えば、データ収集部は、監視場所を撮影することによって画像を収集してもよい。また、例えば、設置場所において録音することによって音声データを収集してもよい。Each of the
個々の識別システム100は、データ収集部とは別にコンピュータを備え、そのコンピュータは、データ(画像や音声データ等)が表わす物体を識別する。Each
また、個々の識別システム100は、データ収集部が収集したデータを教師データとしてモデルを学習する。このモデルは、データが表わす物体を識別するためのモデルである。(4) Each
そして、各識別システム100は、モデルを提供し合い、他の識別システム100から提供されたモデルを利用して、自身のモデルを学習し直す。各 Then, each
ここで、1つの識別システム100に着目した場合、着目している識別システム100に対してモデルを送信する他の識別システム100が予め定められている。着目している識別システム100に対してモデルを送信する他の識別システム100を、第1の識別システムと称する。本実施形態では、着目している識別システム100に対して、第1の識別システムが複数定められているものとして説明する。着目している識別システム100は、第1の識別システムからモデルの提供を受けると言うことができる。Here, when focusing on one
また、着目している識別システム100がモデルを送信するときの送信先となる他の識別システム100が予め定められている。着目している識別システム100がモデルを送信するときの送信先となる他の識別システム100を、第2の識別システムと称する。本実施形態では、着目している識別システム100に対して、第2の識別システムが1つまたは複数定められているものとして説明する。着目している識別システム100は、第2の識別システムにモデルを提供すると言うことができる。Also, another
第1の識別システムおよび第2の識別システムは、個々の識別システム100毎に予め定められている。例えば、各識別システム100を管理する管理者が、個々の識別システム100毎に、第1の識別システムおよび第2の識別システムを予め定めておけばよい。The first identification system and the second identification system are predetermined for each
各識別システム100は、同様の構成であるが、第1の識別システムおよび第2の識別システムは、識別システム100毎に個別に定められる。Each
図2は、第1の識別システムおよび第2の識別システムの例を示す説明図である。ここでは、図2に示す識別システム100aに着目するものとする。また、図2において、矢印は、モデルが送られる方向を表わしている。図2に示す例では、着目している識別システム100aに関して、識別システム100b,100cが第1の識別システムとして定められ、識別システム100b,100c,100dが第2の識別システムとして定められている。識別システム100b,100c,100dに関しても、それぞれ個別に、第1の識別システムおよび第2の識別システムが定められている。FIG. 2 is an explanatory diagram showing an example of the first identification system and the second identification system. Here, attention is focused on the
図3は、本発明の実施形態の識別システム100の構成例を示すブロック図である。識別システム100は、データ収集部101と、コンピュータ102とを備える。データ収集部101とコンピュータ102とは、有線または無線で通信可能に接続される。以下の説明では、データ収集部101がカメラである場合を例にして説明し、データ収集部101をカメラ101と記す。カメラ101は、そのカメラ101の設置場所から撮影を行う。なお、カメラ101の設置場所と、コンピュータ102の設置場所とが異なっていてもよい。FIG. 3 is a block diagram showing a configuration example of the
コンピュータ102は、学習部103と、第1のモデル記憶部104と、データ取得部105と、第1の識別部106と、決定部107と、領域修正GUI(Graphical User Interface)表示制御部108と、領域抽出部109と、第2のモデル記憶部110と、モデル更新部121と、第2の識別部111と、表示制御部112と、属性データ記憶部113と、統合部114と、ディスプレイ装置115と、マウス116と、結果記憶部117と、モデル送信部122とを備える。The
学習部103は、カメラ101が撮影によって得た画像を教師データとして、機械学習によってモデルを学習する。以下、学習部103が、ディープラーニングによってモデルを学習する場合を例にして説明する。教師データは、例えば、カメラ101が撮影によって得た画像と、その画像に写っている物体を示すラベルとの組の集合である。ラベルは、識別システム100のオペレータが決定すればよい。学習は、そのような組の集合を教師データとして、モデルを学習(生成)する。The
また、学習部103は、所定の画像と、その画像に対するラベルが特定された場合、その画像とラベルの組を教師データに追加して、ディープラーニングによって、モデルを再学習する。所定の画像とは、後述の決定部107が、第2の識別部111に識別処理を実行させると決定した画像である。なお、本実施形態では、そのように決定された画像において、物体が写っている領域が抽出され、抽出された領域の画像とラベルとの組が教師データに追加される場合を例にして説明する。{Circle around (4)} When a predetermined image and a label for the image are specified, the
学習部103が学習によって生成したモデルを、以下、内部生成モデルと記す場合がある。また、後述するように、第2のモデル記憶部110は、図3に示す識別システム100に対して予め定められている第1の識別システムで同様に生成されたモデルを記憶する。以下、内部生成モデルと区別するために、第1の識別システムで生成されたモデルを、外部生成モデルと記す場合がある。なお、後述のモデル更新部121が、第1の識別システムからモデルを受信し、そのモデルを、外部生成モデルとして第2のモデル記憶部110に記憶させる。モ デ ル A model generated by the
内部生成モデルおよび外部生成モデルは、与えられた新たな画像に写っている物体を識別するためのモデルである。以下、内部生成モデルおよび外部生成モデルがいずれも、画像に写っている物体が「自動車」、「オートバイ」、「バス」、「背景(すなわち、自動車、オートバイおよびバスは写っていない。)」の何れであるかを判定するためのモデルであるものとして説明する。このようなモデルを学習する場合、オペレータは、教師データで画像と対になるラベルとして「自動車」、「オートバイ」、「バス」、「背景」のいずれかを画像毎に定める。また、外部生成モデルが第1の識別システムで生成される場合にも、第1の識別システムのオペレータは、教師データで画像と対になるラベルとして「自動車」、「オートバイ」、「バス」、「背景」のいずれかを画像毎に定める。The internally generated model and the externally generated model are models for identifying an object appearing in a given new image. Hereinafter, in both the internally generated model and the externally generated model, the objects appearing in the image are “car”, “motorcycle”, “bus”, and “background (that is, car, motorcycle and bus are not shown)”. The description will be made assuming that the model is a model for determining which one. When learning such a model, the operator determines one of “automobile”, “motorcycle”, “bus”, and “background” as a label to be paired with an image in the teacher data for each image. In addition, even when the externally generated model is generated by the first identification system, the operator of the first identification system may use the “automobile”, “motorcycle”, “bus”, One of the “background” is determined for each image.
本実施形態では、第1の識別部106が、モデルを用いて、画像に写っている物体が「自動車」、「オートバイ」、「バス」、「背景」の何れであるかを判定する場合を例にして説明するが、モデルを用いて判定される対象は、「自動車」、「オートバイ」、「バス」、「背景」に限られない。オペレータは、識別処理の目的に応じた教師データを用意して、その教師データを用いて学習部103にモデルを学習させればよい。なお、モデルを用いて判定される対象(本例では、「自動車」、「オートバイ」、「バス」および「背景」)は、各識別システム100で共通である。In the present embodiment, a case where the
学習部103は、ディープラーニングによって生成した内部生成モデルを第1のモデル記憶部104に記憶させる。第1のモデル記憶部104は、内部生成モデルを記憶する記憶装置である。The
図4は、内部生成モデルおよび外部生成モデルの例を示す模式図である。モデルに適用される画像の画素数がnであるとすると、その画像は、n個の画素の各画素値を要素とするベクトル(X1,X2,・・・,Xn)Tと表すことができる。例えば、X1は、画像における1番目の画素の画素値を表す。X2~Xnに関しても同様である。また、ここで、Tは、転置を意味する。モデルは、複数の層を有し、層毎に複数の係数を含んでいる。図4に示す例では、1番目の層は、係数a1~amを含み、2番目の層は、係数b1~bjを含んでいる。画像を表すベクトルの個々の要素X1~Xnは、1番目の層の各係数a1~amと関連付けられる。図4では、この関連付けを線で表している。また、ある層の各係数は、その次の層の各係数と関連付けられる。図4では、この関連付けも線で表している。関連付けられた要素間には重みが定められる。例えば、関連付けられたa1とb1や、関連付けられたa1とb2等にそれぞれ重みが定められる。FIG. 4 is a schematic diagram illustrating an example of an internally generated model and an externally generated model. Assuming that the number of pixels of an image applied to the model is n, the image can be represented as a vector (X1, X2,..., Xn)T having each pixel value of n pixels as an element. . For example, X1 represents the pixel value of the first pixel in the image. The same applies to X2 to Xn. Here, T means transposition. The model has a plurality of layers and includes a plurality of coefficients for each layer. In the example shown in FIG. 4, the first layer includes coefficients a1 to am, and the second layer includes coefficients b1 to bj. The individual elements X1 to Xn of the vector representing the image are associated with the respective coefficients a1 to am of the first layer. In FIG. 4, this association is represented by a line. Further, each coefficient of a certain layer is associated with each coefficient of the next layer. In FIG. 4, this association is also represented by a line. A weight is determined between the associated elements. For example, weights are determined for the associated a1 and b1, the associated a1 and b2, and the like.
学習部103は、教師データを用いてディープラーニングを行うことによって、層の数、各層に含まれる係数の数、各層における個々の係数の値、関連付けられた要素間の重みの値をそれぞれ決定する。これらの値が定めることが、内部生成モデルを生成することに該当する。The
教師データが異なれば、層の数、各層に含まれる係数の数、各層における個々の係数の値、関連付けられた要素間の重みの値は、変化する。従って、内部生成モデルおよび外部生成モデルは図4に例示する形式のように表すことができるが、層の数、各層に含まれる係数の数、各層における個々の係数の値、関連付けられた要素間の重みの値等は、内部生成モデルと外部生成モデルとで異なる。また、本実施形態では、第2のモデル記憶部110は、複数の第1の識別システムで学習された個々の外部生成モデルをそれぞれ記憶する。個々の外部生成モデルも、それぞれ異なる識別システム100において異なる教師データに基づいて生成されているので、層の数等は、外部生成モデル毎に異なる。If the teacher data is different, the number of layers, the number of coefficients included in each layer, the value of each coefficient in each layer, and the value of the weight between associated elements change. Accordingly, the internally generated model and the externally generated model can be represented as shown in the format illustrated in FIG. 4, but the number of layers, the number of coefficients included in each layer, the value of each coefficient in each layer, the , Etc., differ between the internally generated model and the externally generated model. In the present embodiment, the second model storage unit 110 stores each of the externally generated models learned by the plurality of first identification systems. Each of the externally generated models is also generated based on different teacher data in
データ取得部105は、カメラ101が撮影によって得た新たな画像をカメラ101から取得する。データ取得部105は、カメラ101から画像を受信するためのインタフェースである。The
第1の識別部106は、データ取得部105が新たな画像をカメラ101から取得したときに、第1のモデル記憶部104に記憶されている内部生成モデルにその画像を適用することによって、その画像が表わす物体を識別する。本例では、第1の識別部106は、内部生成モデルに画像を適用することによって、画像に写っている物体が「自動車」であるのか、「オートバイ」であるのか、「バス」であるのか、あるいは、「背景」しか写っていないのかを判定する。When the
画像が得られた場合、画像を表すベクトル(X1,X2,・・・,Xn)Tが定まる。第1の識別部106は、そのベクトル(X1,X2,・・・,Xn)Tと、内部生成モデルに含まれる各層の各係数およびモデルに含まれる各重みとを用いた演算により、「自動車」、「オートバイ」、「バス」、「背景」の信頼度を算出する。そして、第1の識別部106は、「自動車」、「オートバイ」、「バス」、「背景」のうち、最も高い信頼度が得られたラベルを、画像に写っている物体を示すラベルとして定める。例えば、第1の識別部106が、画像を表すベクトルをモデルに適用した結果、「自動車」、「オートバイ」、「バス」、「背景」それぞれの信頼度として、“0.6”、“0.2”、“0.1”、“0.1”が得られたとする。この場合、第1の識別部106は、画像に写っている物体は、最も高い信頼度“0.6”が得られた「自動車」であると識別する。また、定めたラベルが「背景」以外である場合、第1の識別部106は、画像に写っている物体(「自動車」、「オートバイ」または「バス」)を囲む矩形領域を、画像を表すベクトルと内部生成モデルとを用いた演算によって判定する。定めたラベルが「背景」であるということは、画像に物体が写っていないと判定したことを意味しているので、この場合には、第1の識別部106は、画像に写っている物体を囲む矩形領域を判定しない。When an image is obtained, a vector (X1, X2,..., Xn)T representing the image is determined. The
第1の識別部106は、識別処理の対象とした画像と、識別結果に該当するラベルと、そのラベルに対応する信頼度とを対応付けて、結果記憶部117に記憶させる。例えば、上記の例のように、第1の識別部106が、画像に写っている物体が、最も高い信頼度“0.6”が得られた「自動車」であると判定したとする。この場合、第1の識別部106は、その画像と、ラベル「自動車」と、信頼度“0.6”とを対応付けて、結果記憶部117に記憶させる。結果記憶部117は、識別結果等を記憶する記憶装置である。ただし、結果記憶部117は、後述するように、画像内における矩形領域を示す情報等も追加して記憶する。{Circle around (1)} The
第2のモデル記憶部110は、内部生成モデル(学習部103が生成したモデル)とは異なるモデルを記憶する記憶装置である。より具体的には、第2のモデル記憶部110は、図3に示す識別システム100に対して予め定められている複数の第1の識別システムで学習された個々のモデル(外部生成モデル)を記憶する。第2のモデル記憶部110に記憶される個々のモデルは、いずれも図4に模式的に示すモデルと同様の形式で表される。The second model storage unit 110 is a storage device that stores a model different from the internally generated model (the model generated by the learning unit 103). More specifically, the second model storage unit 110 stores individual models (externally generated models) learned by a plurality of first identification systems predetermined for the
モデル更新部121は、図3に示す識別システム100に対して予め定められている複数の第1の識別システムからそれぞれモデルを受信し、そのモデルを、外部生成モデルとして第2のモデル記憶部110に記憶させる。The
個々の第1の識別システムは、図3に示す識別システム100と同様に、後述のモデル送信部122を備えている。そして、個々の第1の識別システムのモデル送信部122は、その第1の識別システムが学習したモデルを、適宜、図3に示す識別システム100に送信する。Each first identification system includes a
モデル更新部121は、第1の識別システムが送信したモデルを受信する。その第1の識別システムが、図3に示す識別システム100に対して初めてモデルを送信したとする。その場合、第2のモデル記憶部110は、その第1の識別システムで学習されたモデルを、まだ記憶していない。このとき、モデル更新部121は、受信したモデルを外部生成モデルとして、送信元となる第1の識別システムを示す情報と関連付けて、第2のモデル記憶部110に記憶させる。また、その第1の識別システムが、図3に示す識別システム100に対して以前にモデルを送信したことがあるとする。その場合、第2のモデル記憶部110は、その第1の識別システムで学習されたモデルを既に記憶している。このとき、モデル更新部121は、その第1の識別システムで学習されたモデルとして既に第2のモデル記憶部110に記憶されているモデルを、新たに受信したモデルに更新する。The
以下の説明では、第2のモデル記憶部110は、図3に示す識別システム100に対して予め定められている複数の第1の識別システムで学習された個々のモデル(外部生成モデル)を全て記憶済みであるものとする。この状態で、モデル更新部121は、第1の識別システムからモデルを受信すると、第2のモデル記憶部110に記憶されているモデルを、受信したモデルに更新する。In the following description, the second model storage unit 110 stores all the individual models (externally generated models) learned by a plurality of first identification systems predetermined for the
第2の識別部111は、第1の識別部106が識別対象とした各画像のうち、所定の画像を、第2のモデル記憶部110に記憶されている外部生成モデルに適用することによって、その所定の画像に写っている物体を識別する。第2の識別部111は、この処理を、個々の外部生成モデル毎に実行する。第2の識別部111は、所定の画像を外部生成モデルに適用することによって、「自動車」、「オートバイ」、「バス」、「背景」の信頼度をそれぞれ算出する。そして、第2の識別部111は、「自動車」、「オートバイ」、「バス」、「背景」のうち、最も高い信頼度が得られたラベルを、画像に写っている物体を示すラベルとして定める。The second identification unit 111 applies a predetermined image among the images identified by the
また、第1の識別部106が識別対象とした各画像のうちの所定の画像とは、第1の識別部106が識別対象とした各画像のうち、決定部107が、第2の識別部111に識別処理を実行させると決定した画像である。In addition, the predetermined image of the images identified by the
決定部107は、第1の識別部106が識別対象とした各画像のうち、第2の識別部111に識別処理を実行させる画像を決定する。以下、決定部107が、第1の識別部106が識別対象とした各画像のうち、第2の識別部111に識別処理を実行させる画像を決定する方法として、3種類の決定方法を例示して説明する。決定部107は、以下に示す3種類の決定方法のうちの1つの決定方法のみを採用してもよい。あるいは、決定部107は、以下に示す3種類の決定方法のうちの複数の決定方法を採用してもよい。この場合、決定部107は、複数の決定方法のうちのいずれかの決定方法で、ある画像に対して第2の識別部111に識別処理を実行させると決定した場合には、その画像に対して第2の識別部111に識別処理を実行させることを確定する。The
[第1の決定方法]
第1の決定方法は、画像に写っている物体を表わすラベルとして第1の識別部106によって定められたラベルが、誤りであった場合に、決定部107が、その画像に対して第2の識別部111に識別処理を実行させると決定する方法である。すなわち、決定部107が、第1の識別部106が誤識別した画像に対して、第2の識別部111に識別処理を実行させると決定する方法である。第1の識別部106によって定められたラベルが、誤りであるか否かは、例えば、識別システム100のオペレータによって判断されてもよい。以下、この場合を例にして説明する。第1の識別部106が画像に対するラベルを定めた場合、決定部107は、その画像と、その画像に対して定められたラベルと、そのラベルが正しいか否かをオペレータが入力するためのGUI(本例では、2つのボタンとする。)とを表わす画面を、ディスプレイ装置115上に表示する。図5は、第1の決定方法において決定部107がディスプレイ装置115上に表示する画面の例を示す模式図である。[First determination method]
The first determination method is that, when the label determined by the
決定部107は、第1の識別部106が画像に対するラベルを定めた場合、図5に例示するように、第1の識別部106が識別対象とした画像301と、第1の識別部106によって定められたラベル302(図5に示す例では「オートバイ」)と、第1ボタン304および第2ボタン305とを表わす画面を、ディスプレイ装置115上に表示する。第1ボタン304は、画像に対するラベルが正しいことを入力するためのボタンであり、第1ボタン304がクリックされたということは、画像に対するラベルが正しい旨の情報がオペレータから入力されたことを意味する。また、第2ボタン305は、画像に対するラベルが誤っていることを入力するためのボタンであり、第2ボタン305がクリックされたといういことは、画像に対するラベルが誤っている旨の情報がオペレータから入力されたことを意味する。図5に示す例では、画像301には自降車が写っているが、第1の識別部106によって定められたラベルとして「オートバイ」が表示されている。従って、オペレータは、マウス116を用いて第2ボタン305をクリックする。なお、図5に示す例では、第1の識別部106によって定められたラベルとして「自動車」が表示されているならば、オペレータは、第1ボタン304をクリックする。When the
決定部107は、図5に例示する画面において、第2ボタン305がクリックされると、第1の識別部106によって定められたラベルが誤っていると判定し、第1の識別部106が識別対象とした画像301に対して、第2の識別部111に識別処理を実行させると決定する。When the
なお、第1ボタン304がクリックされた場合には、決定部107は、第1の識別部106が識別対象とした画像301に対して、第2の識別部111に識別処理を実行させないと決定する。When the
[第2の決定方法]
第2の決定方法は、画像に対して定められたラベルに対応する信頼度が予め定められた閾値以下である場合に、決定部107が、その画像に対して第2の識別部111に識別処理を実行させると決定する方法である。[Second determination method]
In a second determination method, when the reliability corresponding to the label determined for the image is equal to or less than a predetermined threshold, the
すなわち、第1の識別部106が画像に対して定めたラベルに対応する信頼度が閾値以下である場合、決定部107は、その画像に対して第2の識別部111に識別処理を実行させると決定する。また、第1の識別部106が画像に対して定めたラベルに対応する信頼度が閾値を超えている場合には、決定部107は、その画像に対して第2の識別部111に識別処理を実行させないと決定する。閾値は、例えば、“0.5”であるが、“0.5”以外の値であってもよい。That is, when the reliability corresponding to the label determined for the image by the
第2の決定方法は、決定部107は、第1の識別部106が導出した信頼度と閾値との比較によって、画像に対して第2の識別部111に識別処理を実行させるか否かを決定する。従って、第2の決定方法では、図5に例示する画面を表示する必要はない。In a second determination method, the
[第3の決定方法]
第3の決定方法は、第1の識別部106が画像に対して定めたラベルが「背景」であるにも関わらず、その画像に「自動車」、「オートバイ」または「バス」が写っている場合に、決定部107が、その画像に対して第2の識別部111に識別処理を実行させると決定する方法である。換言すれば、第3の決定方法は、第1の識別部106が画像に「自動車」、「オートバイ」および「バス」のいずれも写っていないと判定したにも関わらず、その画像に「自動車」、「オートバイ」または「バス」が写っている場合に、決定部107が、その画像に対して第2の識別部111に識別処理を実行させると決定する方法である。特定されたラベルが「背景」である場合に、画像に「自動車」等が写っているか否かの判断は、識別システム100のオペレータが行う。[Third determination method]
In the third determination method, although the label determined for the image by the
第3の方法では、画像に対するラベルとして「背景」が定められた場合、決定部107は、その画像と、そのラベル「背景」と、前述の第1ボタン304および第2ボタン305とを表わす画面を、ディスプレイ装置115上に表示する。図6は、第3の決定方法において決定部107がディスプレイ装置115上に表示する画面の例を示す模式図である。In the third method, when “background” is determined as a label for an image, the
決定部107は、第1の識別部106が画像に対してラベルとして「背景」を定めた場合、図6に例示するように、第1の識別部106が識別対象とした画像301と、ラベル302と、第1ボタン304および第2ボタン305とを表わす画面を、ディスプレイ装置115上に表示する。第3の決定方法で表示される画面では、ラベル302として「背景」が表示される。第1ボタン304および第2ボタン305は、図5に示す第1ボタン304および第2ボタン305と同様であり、説明を省略する。When the
図6に示す例では、第1の識別部106が画像301に対して定めたラベルが「背景(自動車、オートバイおよびバスは写っていない。)」であるにも関わらず、画像301には、自動車が写っている。従って、オペレータは、マウス116を用いて第2ボタン305をクリックする。なお、画像301に、自動車、オートバイおよびバスのいずれもが写っていないならば、オペレータは、第1ボタン304をクリックする。In the example shown in FIG. 6, although the label determined by the
決定部107は、図6に例示する画面において、第2ボタン305がクリックされると、ラベル「背景」が特定されているが、画像には「自動車」、「オートバイ」および「バス」のいずれかが写っていると判定し、その画像に対して第2の識別部111に識別処理を実行させると決定する。When the
なお、図6に例示する画面において第1ボタン304がクリックされた場合には、決定部107は、画像には「自動車」、「オートバイ」および「バス」のいずれも写っておらず、ラベル「背景」は正しいと判断し、その画像に対して第2の識別部111に識別処理を実行させないと決定する。When the
次に、領域修正GUI表示制御部108について説明する。前述のように、第1の識別部106は、画像に対して定めたラベルが「背景」以外である場合、画像に写っている物体(「自動車」、「オートバイ」または「バス」)を囲む矩形領域を判定する。領域修正GUI表示制御部108は、決定部107によって第2の識別部111に識別処理を実行させると決定した画像を、その矩形領域とともにディスプレイ装置115上に表示し、さらに、その矩形領域を修正するためのGUIを示す画面をディスプレイ装置115上に表示する。ただし、前述の第3の方法で決定された画像に対しては、「背景」というラベルが定められているので、矩形領域は判定されていない。この場合、領域修正GUI表示制御部108は、矩形領域を表示しない。Next, the area correction GUI
図7は、領域修正GUI表示制御部108がディスプレイ装置115に表示する画面の一例を示す模式図である。図7に示す矩形領域309は、第1の識別部106が、画像301内で「自動車」を囲む領域として定めた矩形領域である。また、領域修正GUI表示制御部108は、画面内に確定ボタン307および修正ボタン308を含める。確定ボタン307は、表示された矩形領域を確定することをオペレータが指示するためのボタンである。修正ボタン308は、矩形領域309の修正を受け付けることをオペレータが指示するためのボタンである。FIG. 7 is a schematic diagram showing an example of a screen displayed on the
図7に示す例では、矩形領域309は、画像301内で「自動車」を囲む矩形領域として適切である。オペレータは、このように判断した場合、確定ボタン307をクリックする。確定ボタン307がクリックされると、領域抽出部109は、その時点で、画像301内における矩形領域309を確定する。In the example shown in FIG. 7, the
図8は、領域修正GUI表示制御部108がディスプレイ装置115に表示する画面の他の例を示す模式図である。図8に示す例では、矩形領域309は、画像301内で「自動車」を囲む矩形領域として適切でない。この場合、領域修正GUI表示制御部108は、オペレータの操作に応じて、「自動車」を囲む矩形領域として適切な矩形領域を受け付ける。図8に例示する適切でない矩形領域309が表示された場合には、オペレータは、修正ボタン308をクリックする。修正ボタン308がクリックされた後には、領域修正GUI表示制御部108は、オペレータによるマウス116を用いた操作に応じて、矩形領域309の頂点や辺の位置の修正を受け付ける。オペレータは、頂点や辺の位置を修正することによって、矩形領域309を、図7に例示するような適切な位置や大きさに修正することができる。領域修正GUI表示制御部108、そのような修正を受け付ける。オペレータは、矩形領域309を、画像301内に写っている物体(本例では「自動車」)を囲む適切な位置や大きさに矩形領域309が修正した後、確定ボタン307をクリックする。前述のように、確定ボタン307がクリックされると、領域抽出部109は、その時点で、画像301内における矩形領域309を確定する。本例では、領域抽出部109は、修正後の矩形領域309を確定する。FIG. 8 is a schematic diagram showing another example of a screen displayed on the
また、既に説明したように、前述の第3の方法で決定された画像に対しては、「背景」というラベルが定められているので、矩形領域は判定されていない。この場合、領域修正GUI表示制御部108は、図7に例示する画面において、矩形領域309を表示しない。この場合、オペレータが修正ボタン308をクリックすると、領域修正GUI表示制御部108は、画像301の任意の場所に任意の大きさで矩形領域309を表示し、オペレータによるマウス116を用いた操作に応じて、矩形領域309の頂点や辺の位置の修正を受け付ける。オペレータは、表示された矩形領域309を、画像301内に写っている物体を囲む適切な位置や大きさに修正した後、確定ボタン307をクリックすればよい。確定ボタン307がクリックされると、領域抽出部109は、その時点で、画像301内における矩形領域309を確定する。{Circle around (2)} As described above, since the label “background” is defined for the image determined by the above-described third method, the rectangular area is not determined. In this case, the area correction GUI
上記のように、領域抽出部109は、確定ボタン307がクリックされると、その時点で、画像301内における矩形領域309を確定する。そして、領域抽出部109は、その画像から、確定した矩形領域を抽出する。この矩形領域は、画像に写っている物体を囲む領域である。領域抽出部109は、結果記憶部117に記憶されている画像、第1の識別部106による識別結果となるラベル、および、そのラベルに対応する信頼度に対応させて、確定した矩形領域を表わす情報も結果記憶部117に記憶させる。矩形領域を表わす情報は、例えば、矩形領域の各頂点の座標である。As described above, when the
第2の識別部111は、領域抽出部109によって抽出された矩形領域の画像を対象にして、その矩形領域の画像に写っている物体を識別する。第2の識別部111は、この処理を、第2のモデル記憶部110に記憶されている個々の外部生成モデル毎に実行する。The second identification unit 111 identifies an object appearing in the image of the rectangular area with respect to the image of the rectangular area extracted by the
第2の識別部111は、抽出された矩形領域の画像を外部生成モデルに適用することによって、「自動車」、「オートバイ」、「バス」、「背景」の信頼度をそれぞれ算出する。そして、第2の識別部111は、「自動車」、「オートバイ」、「バス」、「背景」のうち、最も高い信頼度が得られたラベルを、画像に写っている物体を示すラベルとして定める。また、第2の識別部111は、ラベル毎に求めた信頼度、並びに、画像に写っている物体を示すラベルおよびそのラベルに対応する信頼度を、既に、結果記憶部117に記憶されているその画像に対応付けて、結果記憶部117に記憶させる。第2の識別部111は、この処理を外部生成モデル毎に実行する。以下、説明を簡単にするために、図3に示す識別システム100に対して定められている第1の識別システムが2つであり、第2のモデル記憶部110に記憶されている外部生成モデルの数が2個であるものとして説明する。そして、その2個の外部生成モデルの一方を符号“A”で表し、他方を符号“B”で表す。The second identification unit 111 calculates the reliability of “automobile”, “motorcycle”, “bus”, and “background” by applying the extracted image of the rectangular area to the externally generated model. Then, the second identification unit 111 determines a label with the highest reliability among “automobile”, “motorcycle”, “bus”, and “background” as a label indicating an object appearing in the image. . In addition, the second identification unit 111 has already stored in the
この場合、結果記憶部117には、画像と、第1の識別部106がその画像に対して識別処理を行って定めたラベルと、そのラベルに対応する信頼度と、確定された画像内の矩形領域を表わす情報とが記憶される。さらに、それらの情報に対応付けて、第2の識別部111が外部生成モデルAに矩形領域の画像を適用して得たラベル毎の信頼度、および、最も信頼度が高いラベルとそのラベルに対応する信頼度、並びに、第2の識別部111が外部生成モデルBに矩形領域の画像を適用して得たラベル毎の信頼度、および、最も信頼度が高いラベルとそのラベルに対応する信頼度も、結果記憶部117に記憶される。In this case, the
結果記憶部117は、上記のような情報のセットが蓄積されるThe
ただし、決定部107が第2の識別部111に識別処理を実行させると決定しなかった画像に関しては、画像と、第1の識別部106がその画像に対して識別処理を行って定めたラベルと、そのラベルに対応する信頼度が結果記憶部117に記憶され、画像内の矩形領域を表わす情報等は記憶されない。However, for an image for which the determining
表示制御部112は、結果記憶部117に記憶された情報から、1組の情報のセットを読み出し、画像と、第1の識別部106が導出したラベルおよびそのラベルに対応する信頼度と、第2の識別部111が外部生成モデル毎に導出したラベルおよびそのラベルに対応する信頼度とを含む画面を、ディスプレイ装置115上に表示する。The display control unit 112 reads one set of information from the information stored in the
図9は、表示制御部112が表示する画面の例を示す模式図である。表示制御部112は、第1の識別部106が導出したラベルおよびそのラベルに対応する信頼度501と、第2の識別部111が外部生成モデルAを用いて導出したラベルおよびそのラベルに対応する信頼度502と、第2の識別部111が外部生成モデルBを用いて導出したラベルおよびそのラベルに対応する信頼度503とを、画像301に重畳した画面を、ディスプレイ装置115上に表示する。図9に示す例では、表示制御部112は、確定している矩形領域309も、画像301に重畳させて表示する。本例では、第2のモデル記憶部110に記憶されている外部生成モデルが2個である場合を例示しているが、外部生成モデルの数は3個以上であってもよい。FIG. 9 is a schematic diagram showing an example of a screen displayed by the display control unit 112. The display control unit 112 corresponds to the label derived by the
さらに、表示制御部112は、この画面内に、チェックボックス504と、再学習ボタン505と、画面切り替えボタン506,507を表示させる。(4) The display control unit 112 further displays a
チェックボックス504は、画面内に表示されている画像301(より具体的には、画像301から抽出される矩形領域309の画像)を教師データに含めるか否かを指定するためのGUIである。チェックボックス504がチェックされている場合、画像301から抽出される矩形領域309の画像を教師データに含めることを意味する。チェックボックス504がチェックされていない場合、画像301を教師データに含めないことを意味する。なお、表示制御部112は、外部生成モデルを用いて導出された信頼度に応じて、予めチェックされた状態でチェックボックス504を表示してもよい。例えば、外部生成モデルを用いて導出されたラベルおよび信頼度の組において、信頼度が閾値(例えば、“0.5”)よりも大きい組が1組以上あれば、表示制御部112は、予めチェックされた状態でチェックボックス504を表示してもよい。オペレータは、チェックボックス504をマウス116でクリックすることによって、チェックボックス504にチェックを入れたり、チェックボックス504からチェックを外したりすることができる。オペレータは、画像301と、外部生成モデル毎に導出されたラベルおよび信頼度を参照することによって、画像301から抽出される矩形領域309の画像を教師データに含めるか否かを判断すればよい。そして、オペレータは、その判断に基づいて、チェックボックス504にチェックを入れるか否かを決定すればよい。The
画面切り替えボタン506,507は、異なる画像を表示する画面に切り替えるためのボタンである。例えば、画面切り替えボタン506がクリックされた場合、表示制御部112は、時系列順で画像301よりも前の画像を含んでいる、図9に示す画面と同様の画面に切り替える。また、例えば、画面切り替えボタン507がクリックされた場合、表示制御部112は、時系列順で画像301よりも後の画像を含んでいる、図9に示す画像と同様の画面に切り替える。オペレータは、切り替えた各画面において、チェックボックス504にチェックを入れるか否かを決定すればよい。The
再学習ボタン505は、オペレータが識別システム100に、内部生成モデルの再学習を指示するためのボタンである。再学習ボタン505がクリックされた場合、統合部114は、チェックボックス504がチェックされた画面の画像毎に、ラベルを特定する。以下の説明では、説明を簡単にするために、図9に例示する画面のみで、チェックボックス504がチェックされている場合を例にして説明する。この場合、統合部114は、図9に例示する画像301のラベルを特定する。The
以下、統合部114が1つの画像のラベルを特定する処理について説明する前に、まず、属性データ記憶部113について説明する。属性データ記憶部113は、属性データ記憶部113を含むコンピュータ102(図3に示すコンピュータ102)に接続されているカメラ101の属性を示すデータ(属性データ)と、第2のモデル記憶部110に記憶されている各外部生成モデルを生成した各識別システム100(すなわち、各第1の識別システム)のカメラ101の属性データとを記憶する記憶装置である。ある外部生成モデルを生成した識別システム100(第1の識別システム)のカメラ101の属性データを、その外部生成モデルに対応する属性データと記す。Hereinafter, the attribute
カメラ101の属性として、カメラ101自体の属性や、カメラ101が設置されている環境に依存する属性等が挙げられる。各属性の値は数値で表される。また、各属性の値は、各識別システム100の管理者がカメラ101の設定や設置環境に応じて予め決定すればよい。属性データは、このような属性の値(数値)を要素とするベクトルで表される。The attributes of the
カメラ101の属性データは、少なくとも、「カメラ101の画角」、「カメラ101が屋内に設置されているか屋外に設置されているか」、「カメラ101の撮影対象」、「カメラ101の撮影対象の移動方向」という各属性のうちの少なくとも一部の属性の値を含む。また、ベクトルで表される属性データが、どの属性の値を要素としているかは、全ての識別システム100で共通であり、どの属性の値がベクトルの何番目の要素なっているかに関しても、全ての識別システム100で共通である。ベクトルの各要素となる数値は、識別システム100毎に異なっていてよい。The attribute data of the
「カメラ101の画角」は、数値で表されるので、管理者は、画角を表わす数値をベクトルの要素として定めればよい。Since the “angle of view of the
「カメラ101が屋内に設置されているか屋外に設置されているか」という属性に関しては、例えば、カメラ101が屋内に設置されている場合には、この属性の値を“0”に定め、カメラ101が屋外に設置されている場合には、この属性の値を“1”に定めればよい。Regarding the attribute “whether the
また、「カメラ101の撮影対象」という属性に関しては、例えば、カメラ101が車両を撮影するように設置されている場合(例えば、カメラ101が車道に向けて設置されている場合)、この属性の値を“0”に定める。また、カメラ101が歩行者を撮影するように設置されている場合(例えば、カメラ101が歩道に向けて設置されている場合)、この属性の値を“1”に定める。また、カメラ101が車両と歩行者の両方を撮影するように設置されている場合(例えば、カメラ101が車両と歩行者の両方が通る道に向けて設置されている場合)、この属性の値を“0.5”に定める。In addition, regarding the attribute of “the object to be captured by the
「カメラ101の撮影対象の移動方向」という属性に関しては、カメラ101の主軸方向等に基づいた基準軸を定め、その基準軸と、撮影対象の主たる移動方向とのなす角度を、この属性の値として定めればよい。As for the attribute “moving direction of the photographing target of the
また、上記以外の属性の値を属性データに含めてもよい。例えば、「カメラ101の設置場所の高さ」、「カメラ101の俯角」、「カメラ101の解像度」等の値を属性データに含めてもよい。「カメラ101の設置場所の高さ」、「カメラ101の俯角」、「カメラ101の解像度」はいずれも数値で表されるので、それらの数値をベクトルの要素として定めればよい。Also, attribute values other than the above may be included in the attribute data. For example, values such as “the height of the installation location of the
属性データ記憶部113は、属性データ記憶部113を含むコンピュータ102(図3に示すコンピュータ102)に接続されているカメラ101の属性データ(ベクトル)を記憶する。この属性データを基準属性データと記す。さらに、属性データ記憶部113は、第2のモデル記憶部110に記憶されている各外部生成モデルを生成した各第1の識別システムのカメラ101の属性データを記憶する。本実施形態では、第2のモデル記憶部110は、外部生成モデルAおよび外部生成モデルBを記憶する。従って、属性データ記憶部113は、基準属性データの他に、外部生成モデルAに対応する属性データ(属性データAと記す。)、および、外部生成モデルBに対応する属性データ(属性データBと記す。)も記憶する。属性データAは、外部生成モデルAを生成した第1の識別システムのカメラ101の属性データである。同様に、属性データBは、外部生成モデルBを生成した第1の識別システムのカメラ101の属性データである。The attribute
各識別システム100を管理する管理者は、図3におけるカメラ101の属性データを基準属性データとして、属性データ記憶部113に記憶させればよい。また、管理者は、図3に示す識別システム100に対して定められた2つの第1の識別システムそれぞれのカメラ101の属性データを、属性データA、属性データBとして、属性データ記憶部113に記憶させればよい。The administrator who manages each
統合部114は、第2の識別部111が、画像に対して個々の外部生成モデル毎に導出した各ラベルの信頼度(本実施形態では、「自動車」、「オートバイ」、「バス」、「背景」それぞれの信頼度)を、ラベル毎に統合し、その統合結果に基づいてその画像のラベルを特定する。The integration unit 114 determines the reliability of each label (in the present embodiment, “car”, “motorcycle”, “bus”, “bus”) derived by the second identification unit 111 for each externally generated model for the image. The reliability of each "background" is integrated for each label, and the label of the image is specified based on the integration result.
このとき、統合部114は、基準属性データ(すなわち、統合部114を含む識別システム100のカメラ101の属性データ)と、外部生成モデルAや外部生成モデルBを生成した複数の第1の識別システムのカメラ101の属性データとの類似度を、第1の識別システム毎に算出する。本実施形態では、統合部114は、基準属性データと属性データAとの類似度と、基準属性データと属性データBとの類似度とを、それぞれ算出する。基準属性データと属性データAとの類似度を、外部生成モデルAに対応する類似度と記す。また、基準属性データと属性データBとの類似度を、外部生成モデルBに対応する類似度と記す。At this time, the integration unit 114 includes the reference attribute data (that is, the attribute data of the
属性データはベクトルで表される。統合部114は、2つの属性データ(ベクトル)の類似度を算出する場合、その2つのベクトルの距離の逆数を、類似度として算出すればよい。Attribute data is represented by a vector. When calculating the similarity between two pieces of attribute data (vectors), the integration unit 114 may calculate the reciprocal of the distance between the two vectors as the similarity.
統合部114は、個々の外部生成モデル毎に導出した各ラベルの信頼度を、ラベル毎に統合するときに、外部生成モデルに対応する類似度で重み付けして、統合する。統合部114は、信頼度の統合結果が最も高くなったラベルを、画像のラベルとして特定すればよい。The integration unit 114 weights the reliability of each label derived for each externally generated model when the label is integrated for each label, with the similarity corresponding to the externally generated model, and integrates them. The integrating unit 114 may specify the label having the highest reliability integration result as the image label.
外部生成モデル毎に導出した各ラベルの信頼度を、ラベル毎に統合する演算について、具体的に説明する。統合部114が信頼度を統合する演算方法として2つの演算方法を説明する。ここでは、1つのラベルに関して、外部生成モデル毎に導出した信頼度を統合する場合を説明する。統合部114は、他のラベルに関しても、同様の演算を行って、外部生成モデル毎に導出した信頼度を統合すればよい。(4) An operation for integrating the reliability of each label derived for each externally generated model for each label will be specifically described. Two calculation methods will be described as a calculation method in which the integration unit 114 integrates the reliability. Here, a case will be described in which the reliability derived for each externally generated model is integrated for one label. The integration unit 114 may perform the same operation on other labels and integrate the reliability derived for each externally generated model.
[第1の演算方法]
まず、信頼度を統合する第1の演算方法について説明する。i番目の外部生成モデルを用いて得られた、着目しているラベルの信頼度をLiとする。また、i番目の外部生成モデルに関して算出された類似度(基準属性データと、i番目の外部生成モデルに対応する属性データとの類似度)をWiとする。また、第2のモデル記憶部110に記憶されている外部生成モデルの数をN個とする。この場合、統合部114は、着目しているラベルの信頼度を、以下に示す式(1)の計算によって統合すればよい。[First operation method]
First, a first calculation method for integrating reliability will be described. Let Li be the reliability of the focused label obtained using the i-th externally generated model. Also, the similarity calculated for the i-th externally generated model (the similarity between the reference attribute data and the attribute data corresponding to the i-th externally generated model) is Wi. The number of externally generated models stored in the second model storage unit 110 is N. In this case, the integrating unit 114 may integrate the reliability of the label of interest by calculating the following expression (1).

すなわち、統合部114は、外部生成モデル毎にLiとWiとの積を算出し、その積の平均値を、着目しているラベルの信頼度の統合結果とすればよい。統合部114は、他のラベルに関しても、同様の演算を行う。そして、統合部114は、統合結果が最も高くなったラベルを、画像のラベルとして特定する。That is, the integrating unit 114 may calculate the product of Li and Wi for each externally generated model, and use the average value of the product as the integrated result of the reliability of the label of interest. The integration unit 114 performs the same operation for other labels. Then, the integration unit 114 specifies the label with the highest integration result as the label of the image.
図10は、第1の演算方法の具体例を示す説明図である。2つの外部生成モデルA,Bがあるとする。外部生成モデルAを用いて導出された「自動車」、「オートバイ」、「バス」および「背景」の信頼度がそれぞれ、“0.1”,“0.7”,“0.1”,“0.1”であるとする。また、外部生成モデルAに関して算出された類似度が“0.9”であるとする。統合部114は、上記の信頼度毎に、類似度“0.9”を乗じた結果を算出する。この結果、「自動車」、「オートバイ」、「バス」および「背景」それぞれに関して、“0.09”,“0.63”,“0.09”,“0.09”という乗算結果(積)が得られる。FIG. 10 is an explanatory diagram showing a specific example of the first calculation method. It is assumed that there are two externally generated models A and B. The reliability of “car”, “motorcycle”, “bus”, and “background” derived using the externally generated model A is “0.1”, “0.7”, “0.1”, “ 0.1 ". It is also assumed that the similarity calculated for the externally generated model A is “0.9”. The integrating unit 114 calculates a result obtained by multiplying the degree of similarity by “0.9” for each reliability. As a result, the multiplication results (product) of “0.09”, “0.63”, “0.09”, “0.09” for “car”, “motorcycle”, “bus”, and “background” respectively. Is obtained.
また、外部生成モデルBを用いて導出された「自動車」、「オートバイ」、「バス」および「背景」の信頼度がそれぞれ、“0.1”,“0.6”,“0.2”,“0.1”であるとする。また、外部生成モデルBに関して算出された類似度が“0.8”であるとする。統合部114は、上記の信頼度毎に、類似度“0.8”を乗じた結果を算出する。この結果、「自動車」、「オートバイ」、「バス」および「背景」それぞれに関して、“0.08”,“0.48”,“0.16”,“0.08”という乗算結果(積)が得られる。Also, the reliability of “car”, “motorcycle”, “bus” and “background” derived using the externally generated model B are “0.1”, “0.6”, and “0.2”, respectively. , "0.1". It is also assumed that the similarity calculated for the externally generated model B is “0.8”. The integrating unit 114 calculates a result of multiplying the degree of similarity “0.8” for each of the above degrees of reliability. As a result, the multiplication results (product) of “0.08”, “0.48”, “0.16”, “0.08” for “car”, “motorcycle”, “bus”, and “background” respectively. Is obtained.
統合部114は、「自動車」、「オートバイ」、「バス」および「背景」毎に得られた乗算結果(積)の平均値を計算する。「自動車」、「オートバイ」、「バス」および「背景」それぞれに関して算出された平均値は、”0.085”,”0.555”,”0.125”,”0.085”である。従って、統合部114は、平均値(統合結果)が最も高い「オートバイ」を、画像のラベルとして特定する。The integration unit 114 calculates an average value of the multiplication results (products) obtained for each of the “car”, “motorcycle”, “bus”, and “background”. The average values calculated for each of "car", "motorcycle", "bus" and "background" are "0.085", "0.555", "0.125", and "0.085". Therefore, the integrating unit 114 specifies “motorcycle” having the highest average value (integrated result) as the image label.
[第2の演算方法]
次に、信頼度を統合する第2の演算方法について説明する。前述の場合と同様に、i番目の外部生成モデルを用いて得られた、着目しているラベルの信頼度をLiとする。また、i番目の外部生成モデルに関して算出された類似度(基準属性データと、i番目の外部生成モデルに対応する属性データとの類似度)をWiとする。また、個々の外部生成モデルに関して算出された個々の類似度の総和をWtとする。また、第2のモデル記憶部110に記憶されている外部生成モデルの数をN個とする。統合部114は、Wtを以下に示す式(2)の計算によって算出すればよい。[Second calculation method]
Next, a second calculation method for integrating reliability will be described. As in the case described above, the reliability of the label of interest obtained using the i-th externally generated model is Li. Also, the similarity calculated for the i-th externally generated model (the similarity between the reference attribute data and the attribute data corresponding to the i-th externally generated model) is Wi. Also, the sum of the individual similarities calculated for the individual externally generated models is Wt. The number of externally generated models stored in the second model storage unit 110 is N. The integrating unit 114 may calculate Wt by the calculation of the following equation (2).

この場合、統合部114は、着目しているラベルの信頼度を、以下に示す式(3)の計算によって統合すればよい。In this case, the integrating unit 114 may integrate the reliability of the label of interest by calculating the following expression (3).

すなわち、統合部114は、外部生成モデル毎に、類似度の総和に対する外部生成モデルに対応する類似度の割合を算出し、その割合の算出結果を重みとして、着目しているラベルの信頼度の重み付け和を算出し、その算出結果を、着目しているラベルの信頼度の統合結果とすればよい。統合部114は、他のラベルに関しても、同様の演算を行う。そして、統合部114は、統合結果が最も高くなったラベルを、画像のラベルとして特定する。That is, the integration unit 114 calculates, for each externally generated model, the ratio of the similarity corresponding to the externally generated model to the sum of the similarities, and uses the calculation result of the ratio as a weight to determine the reliability of the label of interest. The weighted sum may be calculated, and the calculation result may be used as the integrated result of the reliability of the label of interest. The integration unit 114 performs the same operation for other labels. Then, the integration unit 114 specifies the label with the highest integration result as the label of the image.
図11は、第2の演算方法の具体例を示す説明図である。2つの外部生成モデルA,Bがあるとする。外部生成モデルAを用いて導出された「自動車」、「オートバイ」、「バス」および「背景」の信頼度がそれぞれ、“0.1”,“0.7”,“0.1”,“0.1”であるとする。外部生成モデルBを用いて導出された「自動車」、「オートバイ」、「バス」および「背景」の信頼度がそれぞれ、“0.1”,“0.6”,“0.2”,“0.1”であるとする。外部生成モデルAに関して算出された類似度が“0.9”であり、外部生成モデルBに関して算出された類似度が“0.8”であるとする。この場合、類似度の総和は、0.9+0.8=1.7である。よって、類似度の総和“1.7”に対する、外部生成モデルAに対応する類似度“0.9”の割合は、“0.9/1.7”である。また、類似度の総和“1.7”に対する、外部生成モデルBに対応する類似度“0.8”の割合は、“0.8/1.7”である。統合部114は、“0.9/1.7”および“0.8/1.7”を重みとして、ラベル毎に、信頼度の重み付け和を算出し、その算出結果を、ラベルの信頼度の統合結果とする。すると、「自動車」、「オートバイ」、「バス」および「背景」それぞれの統合結果は、“0.0999”,“0.6528”,“0.1470”,“0.0999”となる。従って、統合部114は、統合結果が最も高い「オートバイ」を、画像のラベルとして特定する。FIG. 11 is an explanatory diagram showing a specific example of the second calculation method. It is assumed that there are two externally generated models A and B. The reliability of “car”, “motorcycle”, “bus”, and “background” derived using the externally generated model A is “0.1”, “0.7”, “0.1”, “ 0.1 ". The reliability of “car”, “motorcycle”, “bus” and “background” derived using the externally generated model B is “0.1”, “0.6”, “0.2”, “ 0.1 ". It is assumed that the similarity calculated for the externally generated model A is “0.9” and the similarity calculated for the externally generated model B is “0.8”. In this case, the sum of the similarities is 0.9 + 0.8 = 1.7. Therefore, the ratio of the similarity “0.9” corresponding to the externally generated model A to the total similarity “1.7” is “0.9 / 1.7”. The ratio of the similarity “0.8” corresponding to the externally generated model B to the total similarity “1.7” is “0.8 / 1.7”. The integrating unit 114 calculates a weighted sum of reliability for each label, using “0.9 / 1.7” and “0.8 / 1.7” as weights, and uses the calculation result as the reliability of the label. And the integration result. Then, the integration results of “car”, “motorcycle”, “bus”, and “background” are “0.0999”, “0.6528”, “0.1470”, and “0.0999”. Therefore, the integration unit 114 specifies the “motorcycle” having the highest integration result as the image label.
第1の演算方法および第2の演算方法は、いずれも、個々の外部生成モデル毎に導出したラベルの信頼度を、外部生成モデルに対応する類似度で重み付けして統合する演算であると言える。Each of the first and second calculation methods is a calculation in which the reliability of the label derived for each externally generated model is weighted by the similarity corresponding to the externally generated model and integrated. .
統合部114が、各ラベルの信頼度の統合結果に基づいて、画像のラベルを特定すると、学習部103は、その画像において確定している矩形領域を抽出し、その矩形領域の画像と、統合部114によって特定されたラベルとの組を、既存の教師データに含める。そして、学習部103は、その教師データを用いて、ディープラーニングによって、内部生成モデルを再学習する。さらに、学習部103は、第1のモデル記憶部104に記憶されている既存の内部生成モデルを、再学習によって生成した新たな内部生成モデルに更新する。When the integrating unit 114 specifies the label of the image based on the integration result of the reliability of each label, the
次に、モデル送信部122について説明する。モデル送信部122は、学習部103によって学習されたモデルを、予め定められている第2の識別システムに送信する。モデルの送信先となる第2の識別システムの数は、1つであっても、複数であってもよい。なお、第2の識別システムは、受信したモデルを外部生成モデルとして記憶する。Next, the
モデル送信部122が第2の識別システムにモデルを送信する態様として、4つのモデル送信態様を例示して説明する。As a mode in which the
[第1のモデル送信態様]
第1のモデル送信態様では、モデル送信部122は、学習部103がモデル(内部生成モデル)を再学習した場合に、そのモデルを第2の識別システムに送信する。第1のモデル送信態様では、学習部103によってモデルが再学習される度に、モデル送信部122は、再学習によって新たに得られたモデルを第2の識別システムに送信する。従って、第1のモデル送信態様では、モデル送信部122は、最新のモデルを第2の識別システムに送信することができる。[First Model Transmission Mode]
In the first model transmission mode, when the
[第2のモデル送信態様]
第2のモデル送信態様では、モデル送信部122は、定期的に、第1のモデル記憶部104に記憶されているモデルを第2の識別システムに送信する。すなわち、モデル送信部122は、第1のモデル記憶部104に記憶されているモデルを第2の識別システムに送信してから一定期間経過したときに、再び、第1のモデル記憶部104に記憶されているモデルを第2の識別システムに送信することを繰り返す。この一定期間において、第1のモデル記憶部104に記憶されているモデルが複数回、更新されたとしても、モデル送信部122は、前回のモデル送信時から一定期間経過した時点で第1のモデル記憶部104に記憶されているモデルを第2の識別システムに送信する。また、この一定期間において、第1のモデル記憶部104に記憶されているモデルが更新されなかった場合には、モデル送信部122は、前回送信したモデルと同一のモデルを再度、送信することになる。[Second Model Transmission Mode]
In the second model transmission mode, the
[第3のモデル送信態様]
第3のモデル送信態様では、学習部103がモデル(内部生成モデル)を再学習した場合に、モデル送信部122は、そのモデルを第2の識別システムに送信するか否かを判定する。[Third Model Transmission Mode]
In the third model transmission mode, when the
統合部114がラベルの特定対象とする画像は、第1の識別部106が識別対象とした画像のうち、決定部107が、前述の第1の決定方法、第2の決定方法、または、第3の決定方法によって、第2の識別部111に識別処理を実行させると決定した画像である。すなわち、統合部114がラベルの特定対象とする画像は、第1の識別部106によって誤識別されたり、閾値より大きい信頼度が得られなかったりした画像である。学習部103がモデルを再学習する前に、統合部114は、そのような画像のラベルを、外部生成モデル毎に得られた各ラベルの信頼度を利用することによって、特定している。第3のモデル送信態様では、学習部103がモデル(内部生成モデル)を再学習した場合に、第1の識別部106が、再学習されたそのモデルにその画像を適用することによって、その画像の識別結果(ラベル)を再度、導出する。モデル送信部122は、第1の識別部106が再学習されたモデルを用いて再度、導出したその画像の識別結果(ラベル)と、統合部114によって特定されたラベルとが一致している場合に、再学習されたモデルを第2の識別システムに送信すると判定し、再学習されたモデルを第2の識別システムに送信する。一方、その2つのラベルが一致していない場合、モデル送信部122は、再学習されたモデルを第2の識別システムに送信しないと判定し、モデルを第2の識別システムに送信しない。The image to be specified by the integrating unit 114 as a label is determined by the determining
モデル送信部122は、学習部103がモデルを再学習する毎に、上記のように、そのモデルを第2の識別システムに送信するか否かを判定し、送信すると判定した場合に、そのモデルを第2の識別システムに送信する。Each time the
統合部114は、外部生成モデル毎に得られた各ラベルの信頼度を利用することによって、画像のラベルを特定している。従って、第1の識別部106によって誤識別されたり、閾値より大きい信頼度が得られなかったりした画像であっても、統合部114によって特定されたラベルの正確性は高いと考えられる。従って、第1の識別部106が再学習されたモデルを用いて再度、導出したその画像の識別結果(ラベル)と、統合部114によって特定されたラベルとが一致しているということは、再学習によって得られたモデルの識別精度が再学習前のモデルの識別精度よりも向上したということができる。また、再学習前のモデルでは、正しい識別結果が得られなかったが、再学習によって得られたモデルでは、正しい識別結果が得られるようになったということもできる。従って、第3のモデル送信態様は、再学習によって得られたモデルの識別精度が再学習前のモデルの識別精度よりも向上した場合に、再学習によって得られたモデルを第2の識別システムに送信する態様であるということができる。また、第3のモデル送信態様は、再学習前のモデルでは、正しい識別結果が得られなかったが、再学習によって得られたモデルでは、正しい識別結果が得られるようになった場合に、再学習によって得られたモデルを第2の識別システムに送信する態様であるというということもできる。The integration unit 114 specifies the label of the image by using the reliability of each label obtained for each externally generated model. Therefore, it is considered that the accuracy of the label specified by the integration unit 114 is high even if the image has been erroneously identified by the
[第4のモデル送信態様]
第4のモデル送信態様でも、モデル送信部122は、学習部103がモデル(内部生成モデル)を再学習した場合に、モデル送信部122は、そのモデルを第2の識別システムに送信するか否かを判定する。[Fourth Model Transmission Mode]
Also in the fourth model transmission mode, when the
第4のモデル送信態様では、モデルが再学習された場合に、所定時間内で、第1の識別部106がそのモデルを用いて導出した識別結果(ラベル)の正解率に基づいて、モデル送信部122は、モデルを第2の識別システムに送信するか否かを判定する。モデル送信部122は、その正解率が予め定められた閾値以上である場合に、再学習されたモデルを第2の識別システムに送信すると判定し、そのモデルを第2の識別システムに送信する。一方、その正解率が閾値未満である場合、モデル送信部122は、再学習されたモデルを第2の識別システムに送信しないと判定し、モデルを第2の識別システムに送信しない。In the fourth model transmission mode, when the model is relearned, the model transmission is performed within a predetermined time based on the accuracy rate of the identification result (label) derived by the
所定時間内における識別結果(ラベル)の正解率の算出例を説明する。ここでは、決定部107が、前述の「第1の決定方法」によって、第2の識別部111に識別処理を実行させる画像を決定する場合を例にして説明する。第1の識別部106が画像に対するラベルを定めると、決定部107は、図5に例示する画面をディスプレイ装置115上に表示する。従って、決定部107が図5に例示する画面を表示した回数は、第1の識別部106が画像に対する識別を行った回数であると言える。そして、表示された画面(図5参照)において、第1ボタン304がクリックされた回数は、第1の識別部106が導出したラベルが正しかった回数であると言える。モデル送信部122は、モデルが再学習された場合に、所定時間内で決定部107が図5に例示する画面を表示した回数に対する、第1ボタン304がクリックされた回数の割合を計算し、その結果を、正解率とすればよい。そして、モデル送信部122は、その正解率と閾値とを比較することによって、前述のように、再学習されたモデルを第2の識別システムに送信するか否かを判定すればよい。An example of calculating the accuracy rate of the identification result (label) within a predetermined time will be described. Here, a case will be described as an example where the
本実施形態において、モデル更新部121およびモデル送信部122は、例えば、モデル提供プログラムに従って動作するコンピュータ102のCPU(Central Processing Unit )およびコンピュータ102の通信インタフェースによって実現される。例えば、CPUが、コンピュータ102のプログラム記憶装置等のプログラム記録媒体からモデル提供プログラムを読み込み、モデル提供プログラムに従って、通信インタフェースを用いて、モデル更新部121およびモデル送信部122として動作すればよい。In the present embodiment, the
また、学習部103、第1の識別部106、決定部107、領域修正GUI表示制御部108、領域抽出部109、第2の識別部111、表示制御部112および統合部114は、例えば、モデル提供プログラムに従って動作するコンピュータ102のCPUによって実現される。例えば、CPUが、コンピュータ102のプログラム記憶装置等のプログラム記録媒体からモデル提供プログラムを読み込み、モデル提供プログラムに従って、学習部103、第1の識別部106、決定部107、領域修正GUI表示制御部108、領域抽出部109、第2の識別部111、表示制御部112および統合部114として動作すればよい。In addition, the
また、第1のモデル記憶部104、第2のモデル記憶部110、属性データ記憶部113および結果記憶部117は、コンピュータ102が備える記憶装置によって実現される。The first
次に、本発明の実施形態の処理経過について説明する。図12は、カメラ101が撮影を行ってから、第2の識別部111が画像に対する識別処理を行うまでの処理経過の例を示すフローチャートである。なお、既に説明した動作については、詳細な説明を省略する。Next, the process of the embodiment of the present invention will be described. FIG. 12 is a flowchart illustrating an example of processing progress from the time when the
なお、予め、学習部103がディープラーニングによって内部生成モデルを学習し、その内部生成モデルを第1のモデル記憶部104に記憶させているものとする。Note that it is assumed that the
また、モデル更新部121は、図3に示す識別システム100に対して予め定められている複数の第1の識別システムからそれぞれモデルを受信し、そのモデルを、外部生成モデルとして第2のモデル記憶部110に記憶させているものとする。すなわち、第2のモデル記憶部110は、個々の第1の識別システムで学習されたモデルを、外部生成モデルとして記憶しているものとする。なお、モデル更新部121は、第1の識別システムから新たにモデルを受信した場合には、その第1の識別システムで学習されたモデルとして既に第2のモデル記憶部110に記憶されているモデルを、新たに受信したモデルに更新すればよい。The
まず、カメラ101が、そのカメラ101の設置場所で撮影を行うことによって、画像を得る(ステップS1)。カメラ101は、その画像をコンピュータ102に送信する。First, the
コンピュータ102の第1の識別部106は、データ取得部105を介して、その画像を受け取る。そして、第1の識別部106は、その画像を内部生成モデルに適用することによって、画像に写っている物体を識別する(ステップS2)。ステップS2において、第1の識別部106は、画像に写っている物体を表わすラベルと、そのラベルの信頼度を導出する。第1の識別部106は、画像と、導出したラベルおよび信頼度とを対応付けて結果記憶部117に記憶させる。また、第1の識別部106は、特定したラベルが「背景」でない場合には、画像に写っている物体を囲む矩形領域を判定する。The
次に、決定部107は、ステップS2で第1の識別部106が識別対象とした画像に対して、第2の識別部111に識別処理を実行させるか否かを決定する(ステップS3)。第2の識別部111に識別処理を実行させないと決定した場合には(ステップS3のNo)、ステップS1以降の処理を繰り返す。Next, the
第2の識別部111に識別処理を実行させると決定した場合には(ステップS3のYes)、領域修正GUI表示制御部108が、画像をディスプレイ装置115上に表示する。例えば、領域修正GUI表示制御部108は、図7や図8に例示する画面をディスプレイ装置115上に表示する。そして、領域抽出部109は、その画面に対するオペレータの操作に応じて、画像に写っている物体を囲む矩形領域を確定し、画像からその矩形領域を抽出する(ステップS4)。(4) When it is determined that the second identification unit 111 performs the identification process (Yes in step S3), the area correction GUI
次に、第2の識別部111は、予め第2のモデル記憶部110に記憶されている個々の外部生成モデル毎に、ステップS4で抽出された矩形領域の画像に写っている物体を識別する(ステップS5)。第2の識別部111は、個々の外部生成モデル毎に、各ラベル(「自動車」、「オートバイ」、「バス」および「背景」)それぞれの信頼度を導出する。そして、外部生成モデル毎に導出した各ラベルの信頼度を結果記憶部117に記憶させる。また、第2の識別部111は、個々の外部生成モデル毎に、信頼度が最も高かったラベルと、そのラベルに対応する信頼度の組も、結果記憶部117に記憶させる。信頼度が最も高かったラベルは、画像に写っていると判定された物体を表わしている。Next, the second identification unit 111 identifies an object appearing in the image of the rectangular area extracted in step S4 for each of the externally generated models stored in the second model storage unit 110 in advance. (Step S5). The second identification unit 111 derives the reliability of each label (“car”, “motorcycle”, “bus”, and “background”) for each externally generated model. Then, the
ステップS5の後、ステップS1以降の処理を繰り返す。(4) After step S5, the processes after step S1 are repeated.
図13は、モデル(内部生成モデル)を再学習し、そのモデルを第2の識別システムに送信する場合の処理経過の例を示すフローチャートである。以下の説明においても、既に説明した動作については、詳細な説明を省略する。図13では、前述の「第1のモデル送信態様」を例にして説明する。FIG. 13 is a flowchart showing an example of processing progress when a model (internally generated model) is re-learned and the model is transmitted to the second identification system. In the following description, a detailed description of the operation already described is omitted. In FIG. 13, the above-described “first model transmission mode” will be described as an example.
表示制御部112は、第1の識別部106が導出したラベルおよびそのラベルに対応する信頼度と、第2の識別部111が外部生成モデル毎に導出した各ラベルおよびその各ラベルに対応する信頼度とを、画像に重畳した画面を、ディスプレイ装置115上に表示する(ステップS11)。このとき、表示制御部112は、この画面内に、チェックボックス504と、再学習ボタン505と、画面切り替えボタン506,507とを含める。表示制御部112は、ステップS11において、例えば、図9に例示する画面を表示する。The display control unit 112 determines the label derived by the
オペレータは、図9に例示する画面を確認し、表示されている画像301(より具体的には、画像301において確定している矩形領域309の画像)を教師データに含めるか否かを判断する。オペレータは、チェックボックス504にチェックを入れることで、表示されている画像301を教師データの含めることを指定する。すなわち、チェックボックス504にチェックが入れられた画面に表示された画像は、教師データに含める画像として指定された画像である。また、オペレータは、教師データの含める画像を指定した後、再学習ボタン505をクリックする。The operator checks the screen illustrated in FIG. 9 and determines whether or not to include the displayed image 301 (more specifically, the image of the
オペレータによって再学習ボタン505がクリックされると、統合部114は、基準属性データと、個々の外部生成モデルに対応する個々の属性データとの類似度をそれぞれ算出する(ステップS12)。既に説明したように、属性データはベクトルで表される。統合部114は、2つの属性データ(ベクトル)の類似度を算出する場合、その2つのベクトルの距離の逆数を、類似度として算出すればよい。When the operator clicks the
次に、統合部114は、個々の外部生成モデル毎に導出したラベルの信頼度を、ステップS12で算出した各類似度を用いて、統合する。統合部114は、この処理をラベル毎に行い、信頼度の統合結果が最も高いラベルを、教師データに含める画像に対するラベルとして特定する(ステップS13)。Next, the integration unit 114 integrates the reliability of the labels derived for each of the externally generated models using the similarities calculated in step S12. The integrating unit 114 performs this process for each label, and identifies the label with the highest reliability integration result as the label for the image to be included in the teacher data (step S13).
教師データの含める画像がオペレータによって複数指定されている場合には、統合部114は、その画像毎に、ステップS13の処理を実行する。(4) When a plurality of images to be included in the teacher data are specified by the operator, the integrating unit 114 executes the process of step S13 for each of the images.
次に、学習部103は、教師データに含める画像において確定している矩形領域を抽出し、その矩形領域の画像と、統合部114によって特定されたラベルとの組を既存のデータに含める。そして、学習部103は、その教師データを用いて、ディープラーニングによって内部生成モデルを再学習し、再学習によって得た内部生成モデルを第1のモデル記憶部104に記憶させる(ステップS14)。学習部103は、第1のモデル記憶部104に記憶されている既存の内部生成モデルを、再学習によって生成した新たな内部生成モデルに更新する。Next, the
この後、第1の識別部106が、画像に写っている物体を識別する場合には、再学習によって生成された新たな内部生成モデルを用いる。Thereafter, when the
ステップS14の次に、モデル送信部122は、ステップS14で再学習されたモデル(内部生成モデル)を、第2の識別システムに送信する(ステップS15)。各識別システム100は、同様の構成である。第2の識別システムのモデル更新部121は、ステップS15で送信されたモデルを受信すると、第2の識別システム内の第2のモデル記憶部110に記憶されているモデルを、受信したモデルに更新する。従って、ステップS15でモデル送信部122が第2の識別システムに送信したモデルは、第2の識別システム内で外部生成モデルとして記憶される。(4) After step S14, the
図13では、「第1のモデル送信態様」を例にして説明した。モデル送信部122が、前述の「第2のモデル送信態様」でモデルを第2の識別システムに送信する場合、コンピュータ102は、ステップS14で処理を終了してよい。そして、モデル送信部122は、ステップS11~S14の処理とは別に、定期的に、第1のモデル記憶部104に記憶されているモデルを第2の識別システムに送信すればよい。In FIG. 13, the “first model transmission mode” has been described as an example. When the
図14は、前述の「第3のモデル送信態様」の処理経過の例を示すフローチャートである。ステップS14までの処理は、図13に示すフローチャートと同様であり、説明を省略する。FIG. 14 is a flowchart showing an example of the processing progress of the above-mentioned “third model transmission mode”. The processing up to step S14 is the same as that in the flowchart shown in FIG. 13, and a description thereof will be omitted.
ステップS14の後、第1の識別部106は、チェックボックス504にチェックが入れられた画面内に表示された画像(図9参照)のラベルを、ステップS14で再学習された内部生成モデルを用いて導出する(ステップS21)。チェックボックス504にチェックが入れられた画面内に表示された画像は、教師データに含めることがオペレータによって指定された画像である。After step S14, the
次に、モデル送信部122は、ステップS21で導出されたラベルと、同一画像に対して統合部114がステップS13(図13参照)で特定したラベルとが一致するか否かを判定する(ステップS22)。Next, the
2つのラベルが一致する場合(ステップS22のYes)、モデル送信部122は、ステップS14(図13参照)で再学習されたモデル(内部生成モデル)を第2の識別システムに送信すると判定し、そのモデルを第2の識別システムに送信する(ステップS23)。If the two labels match (Yes in step S22), the
また、2つのラベルが一致しない場合(ステップS22のNo)、モデル送信部122は、ステップS14で再学習されたモデルを第2の識別システムに送信しないと判定し、処理を終了する。If the two labels do not match (No in step S22), the
図15は、前述の「第4のモデル送信態様」の処理経過の例を示すフローチャートである。ステップS14までの処理は、図13に示すフローチャートと同様であり、説明を省略する。FIG. 15 is a flowchart showing an example of the processing progress of the “fourth model transmission mode” described above. The processing up to step S14 is the same as that in the flowchart shown in FIG. 13, and a description thereof will be omitted.
ステップS14の後、モデル送信部122は、所定時間内における、再学習されたモデル(内部生成モデル)を用いた場合の画像の識別結果の正解率を算出する(ステップS31)。この正解率の算出例については既に説明しているので、ここでは、説明を省略する。の 後 After step S14, the
次に、モデル送信部122は、ステップS31で算出した正解率が、予め定められた閾値以上であるか否かを判定する(ステップS32)。Next, the
正解率が閾値以上である場合(ステップS32のYes)、モデル送信部122は、ステップS14(図13参照)で再学習されたモデル(内部生成モデル)を第2の識別システムに送信すると判定し、そのモデルを第2の識別システムに送信する(ステップS33)。When the correct answer rate is equal to or higher than the threshold (Yes in step S32), the
また、正解率が閾値未満である場合(ステップS32のNo)、モデル送信部122は、ステップS14で再学習されたモデルを第2の識別システムに送信しないと判定し、処理を終了する。If the accuracy rate is less than the threshold (No in step S32), the
本実施形態によれば、決定部107は、前述の第1の決定方法、第2の決定方法および第3の決定方法のうちの少なくとも1つの方法で、第1の識別部106が識別処理の対象とした画像に対して、第2の識別部111に識別処理を実行させるか否かを決定する。従って、第2の識別部111によって識別処理が行われる画像は、第1の識別部106によって定められたラベルが誤りであった画像、画像に対して定められたラベルに対応する信頼度が閾値以下であった画像、または、第1の識別部106によって定められたラベルが「背景」であるにも関わらず、物体(「自動車」、「オートバイ」または「バス」)が写っている画像である。本実施形態では、このような画像を、内部生成モデルとは異なるモデル(より具体的には、着目している識別システム100に対して予め定められている第1の識別システムで生成されたモデル(外部生成モデル))に適用した結果に基づいて特定されるラベルと、その画像との組を、既存の教師データに追加して、学習部103が内部生成モデルを再学習する。従って、内部生成モデルの識別精度を向上させることができる。According to the present embodiment, the
そして、モデル送信部122は、学習部103によって学習されたモデルを、例えば、前述の第1のモデル送信態様、第2のモデル送信態様、第3のモデル送信態様、または、第4のモデル送信態様等で、予め定められている第2の識別システムに送信する。第2の識別システムにおいて、モデル更新部121は、受信したモデルを、外部生成モデルとして第2のモデル記憶部110に記憶させる。従って、個々の識別システム100は、自身のモデルの識別精度を向上させるように、自身のモデルを学習し直すことができ、また、他の識別システム100のモデルの識別精度向上に寄与することができる。Then, the
次に、本発明の実施形態の種々の変形例について説明する。Next, various modifications of the embodiment of the present invention will be described.
上記の実施形態では、図7や図8に例示する画面に対するオペレータの操作に応じて、領域抽出部109が、画像に写っている物体を囲む矩形領域を確定し、画像からその矩形領域を抽出する。そして、第2の識別部111が、外部生成モデル毎に、抽出された矩形領域の画像に写っている物体を識別する。第2の識別部111は、抽出された矩形領域の画像ではなく、第1の識別部106が処理対象とした1つの画像全体を対象にして、画像に写っている物体を識別する処理を行ってもよい。この場合、識別システム100(図3参照)は、領域修正GUI表示制御部108および領域抽出部109を備えていなくてもよい。そして、識別システム100は、ステップS4(図12参照)を実行しなくてもよい。第2の識別部111は、ステップ5において、第1の識別部106が処理対象とした1つの画像全体を対象にして、画像に写っている物体を識別すればよい。In the above embodiment, in response to an operator's operation on the screens illustrated in FIGS. 7 and 8, the
また、学習部103は、1つの画像全体と、統合部114が特定したラベルとの組を、既存の教師データに含め、その教師データを用いて、内部生成モデルを再学習すればよい。{Circle around (1)} The
また、学習部103は、画像と統合部114によって特定されたラベルとの組、および、既存の内部生成モデルを教師データとして、ディープラーニングによって内部生成モデルを再学習してもよい。The
また、第2のモデル記憶部110が、1つの外部生成モデルを記憶していてもよい。この場合、学習部103は、画像と、第2の識別部111で導出された、信頼度が最も高いラベルとの組を、既存の教師データに含め、その教師データを用いて、内部生成モデルを再学習すればよい。{Circle around (2)} The second model storage unit 110 may store one externally generated model. In this case, the
図16は、本発明の実施形態やその変形例における識別システム100が備えるコンピュータ102の構成例を示す概略ブロック図である。図16では、コンピュータを符号“1000”で表す。コンピュータ1000は、CPU1001と、主記憶装置1002と、補助記憶装置1003と、インタフェース1004と、ディスプレイ装置1005と、入力デバイス1006と、通信インタフェース1007と、データ収集部101(例えば、カメラ)とのインタフェース1008とを備える。FIG. 16 is a schematic block diagram illustrating a configuration example of a
識別システム100が備えるコンピュータの動作は、モデル提供プログラムの形式で補助記憶装置1003に記憶されている。CPU1001は、そのモデル提供プログラムを補助記憶装置1003から読み出して主記憶装置1002に展開する。そして、CPU1001は、そのモデル提供プログラムに従って、上記の実施形態やその変形例におけるコンピュータ102(図3を参照)の処理を実行する。The operation of the computer included in the
補助記憶装置1003は、一時的でない有形の媒体の例である。一時的でない有形の媒体の他の例として、インタフェース1004を介して接続される磁気ディスク、光磁気ディスク、CD-ROM(Compact Disk Read Only Memory )、DVD-ROM(Digital Versatile Disk Read Only Memory )、半導体メモリ等が挙げられる。また、このプログラムが通信回線によってコンピュータ1000に配信される場合、配信を受けたコンピュータ1000がそのプログラムを主記憶装置1002に展開し、上記の処理を実行してもよい。The
また、プログラムは、実施形態やその変形例における示したコンピュータ102の処理の一部を実現するためのものであってもよい。さらに、プログラムは、補助記憶装置1003に既に記憶されている他のプログラムとの組み合わせで前述の処理を実現する差分プログラムであってもよい。The program may be for realizing a part of the processing of the
また、各構成要素の一部または全部は、汎用または専用の回路(circuitry )、プロセッサ等やこれらの組み合わせによって実現されてもよい。これらは、単一のチップによって構成されてもよいし、バスを介して接続される複数のチップによって構成されてもよい。各構成要素の一部または全部は、上述した回路等とプログラムとの組み合わせによって実現されてもよい。{Some or all of the components may be realized by a general-purpose or dedicated circuit (processor), a processor, or a combination thereof. These may be configured by a single chip, or may be configured by a plurality of chips connected via a bus. Some or all of the components may be realized by a combination of the above-described circuit and the like and a program.
各構成要素の一部または全部が複数の情報処理装置や回路等により実現される場合には、複数の情報処理装置や回路等は集中配置されてもよいし、分散配置されてもよい。例えば、情報処理装置や回路等は、クライアントアンドサーバシステム、クラウドコンピューティングシステム等、各々が通信ネットワークを介して接続される形態として実現されてもよい。When a part or all of each component is realized by a plurality of information processing devices, circuits, and the like, the plurality of information processing devices, circuits, and the like may be centrally arranged or may be distributed. For example, the information processing device, the circuit, and the like may be realized as a form in which each is connected via a communication network, such as a client and server system or a cloud computing system.
次に、本発明の概要について説明する。図17は、本発明の識別システムの概要を示すブロック図である。本発明の識別システムは、学習手段701と、第1のモデル記憶手段702と、第1の識別手段703と、第2のモデル記憶手段704と、モデル更新手段705と、第2の識別手段706と、モデル送信手段707とを備える。Next, the outline of the present invention will be described. FIG. 17 is a block diagram showing an outline of the identification system of the present invention. The identification system according to the present invention includes a
学習手段701(例えば、学習部103)は、データ(例えば、画像)が表わす物体を識別するためのモデルを、教師データを用いて学習する。The learning unit 701 (for example, the learning unit 103) learns a model for identifying an object represented by data (for example, an image) using teacher data.
第1のモデル記憶手段702(第1のモデル記憶部104)は、学習手段701によって学習されたモデルを記憶する。The first model storage unit 702 (first model storage unit 104) stores the model learned by the
第1の識別手段703(例えば、第1の識別部106)は、学習手段701によって学習されたモデルを用いて、データが表わす物体を識別する。The first identification unit 703 (for example, the first identification unit 106) identifies an object represented by data using the model learned by the
第2のモデル記憶手段704(例えば、第2のモデル記憶部110)は、予め定められた複数の第1の識別システムで学習された個々のモデルをそれぞれ記憶する。The second model storage unit 704 (for example, the second model storage unit 110) stores the individual models learned by the plurality of first identification systems determined in advance.
モデル更新手段705(例えば、モデル更新部121)は、第1の識別システムから当該第1の識別システムで学習されたモデルを受信した場合に、第2のモデル記憶手段704に記憶されているその第1の識別システムで学習されたモデルを、その第1の識別システムから受信したモデルに更新する。When the model updating unit 705 (for example, the model updating unit 121) receives a model learned by the first identification system from the first identification system, the
第2の識別手段706(例えば、第2の識別部111)は、所定の場合に、第2のモデル記憶手段704に記憶されている個々のモデル毎に、第1の識別手段703が識別対象としたデータが表わす物体を識別する。In a predetermined case, the second identification unit 706 (for example, the second identification unit 111) determines whether the
学習手段701は、第2の識別手段706が導出した識別結果に基づいて定まるデータに対するラベルと、そのデータとを含む教師データを用いて、モデルを再学習し、第1のモデル記憶手段702に記憶されているモデルを再学習したモデルに更新する。The learning means 701 re-learns the model using the label for the data determined based on the identification result derived by the second identification means 706 and the teacher data including the data, and stores the model in the first model storage means 702. Update the stored model with the retrained model.
モデル送信手段707(例えば、モデル送信部122)は、学習手段701によって学習されたモデルを、予め定められた1つまたは複数の第2の識別システムに送信する。The model transmitting unit 707 (for example, the model transmitting unit 122) transmits the model learned by the
そのような構成によって、本発明の識別システムは、自身のモデルの識別精度を向上させるように、自身のモデルを学習し直すことができ、また、他の識別システムのモデルの識別精度向上に寄与することができる。With such a configuration, the identification system of the present invention can re-learn its own model so as to improve the identification accuracy of its own model, and also contributes to the improvement of the identification accuracy of the models of other identification systems. can do.
モデル送信手段707が、学習手段701がモデルを再学習した場合に、当該モデルを第2の識別システムに送信する構成であってもよい。The model transmitting means 707 may be configured to transmit the model to the second identification system when the learning means 701 re-learns the model.
モデル送信手段707が、定期的に、第1のモデル記憶手段702に記憶されているモデルを第2の識別システムに送信する構成であってもよい。The
第2の識別手段706が第2のモデル記憶手段704に記憶されている個々のモデル毎に導出した識別結果を統合することによって、第1の識別手段703が識別対象としたデータに対するラベルを特定する統合手段(例えば、統合部114)を備え、学習手段701が、統合手段によって特定されたラベルと、そのデータとを含む教師データを用いて、モデルを再学習し、モデル送信手段707が、第1の識別手段703が再学習されたモデルを用いて導出したそのデータの識別結果と、統合手段によって特定されたそのデータに対するラベルとが一致する場合に、再学習されたモデルを第2の識別システムに送信する構成であってもよい。The
モデル送信手段707が、学習手段701がモデルを再学習した場合に、所定時間内で、第1の識別手段703がそのモデルを用いて導出した識別結果の正解率が、予め定められた閾値以上である場合に、そのモデルを第2の識別システムに送信する構成であってもよい。When the
以上、実施形態を参照して本願発明を説明したが、本願発明は上記の実施形態に限定されるものではない。本願発明の構成や詳細には、本願発明のスコープ内で当業者が理解し得る様々な変更をすることができる。Although the present invention has been described with reference to the exemplary embodiments, the present invention is not limited to the above exemplary embodiments. Various changes that can be understood by those skilled in the art can be made to the configuration and details of the present invention within the scope of the present invention.
本発明は、データをモデルに適用することによって、そのデータが表わす物体を識別する識別システムに好適に適用される。The present invention is suitably applied to an identification system that identifies an object represented by data by applying the data to a model.
100 識別システム
101 データ収集部
102 コンピュータ
103 学習部
104 第1のモデル記憶部
105 データ取得部
106 第1の識別部
107 決定部
108 領域修正GUI表示制御部
109 領域抽出部
110 第2のモデル記憶部
111 第2の識別部
112 表示制御部
113 属性データ記憶部
114 統合部
115 ディスプレイ装置
116 マウス
117 結果記憶部
121 モデル更新部
122 モデル送信部REFERENCE SIGNS
Claims (7)
Translated fromJapanese前記学習手段によって学習された前記モデルを記憶する第1のモデル記憶手段と、
前記学習手段によって学習された前記モデルを用いて、データが表わす物体を識別する第1の識別手段と、
予め定められた複数の第1の識別システムで学習された個々のモデルをそれぞれ記憶する第2のモデル記憶手段と、
前記第1の識別システムから当該第1の識別システムで学習されたモデルを受信した場合に、前記第2のモデル記憶手段に記憶されている前記第1の識別システムで学習されたモデルを、前記第1の識別システムから受信したモデルに更新するモデル更新手段と、
所定の場合に、前記第2のモデル記憶手段に記憶されている個々のモデル毎に、前記第1の識別手段が識別対象とした前記データが表わす物体を識別する第2の識別手段とを備え、
前記学習手段は、
前記第2の識別手段が導出した識別結果に基づいて定まる前記データに対するラベルと、前記データとを含む教師データを用いて、モデルを再学習し、前記第1のモデル記憶手段に記憶されているモデルを再学習したモデルに更新し、
前記学習手段によって学習されたモデルを、予め定められた1つまたは複数の第2の識別システムに送信するモデル送信手段を備える
ことを特徴とする識別システム。Learning means for learning a model for identifying an object represented by the data using the teacher data;
First model storage means for storing the model learned by the learning means;
A first identification unit that identifies an object represented by data using the model learned by the learning unit;
Second model storage means for storing individual models learned by a plurality of predetermined first identification systems, respectively;
When a model learned by the first identification system is received from the first identification system, the model learned by the first identification system stored in the second model storage means is received. Model updating means for updating to a model received from the first identification system;
A second identification unit that identifies an object represented by the data that has been identified by the first identification unit for each individual model stored in the second model storage unit in a predetermined case. ,
The learning means,
Using a label for the data determined based on the identification result derived by the second identification unit and teacher data including the data, a model is re-learned and stored in the first model storage unit. Update the model to the retrained model,
An identification system comprising: a model transmission unit that transmits a model learned by the learning unit to one or more predetermined second identification systems.
学習手段がモデルを再学習した場合に、当該モデルを第2の識別システムに送信する
請求項1に記載の識別システム。The model transmission means
The identification system according to claim 1, wherein when the learning unit re-learns the model, the learning unit transmits the model to the second identification system.
定期的に、第1のモデル記憶手段に記憶されているモデルを第2の識別システムに送信する
請求項1に記載の識別システム。The model transmission means
The identification system according to claim 1, wherein the model stored in the first model storage unit is periodically transmitted to the second identification system.
学習手段は、
前記統合手段によって特定されたラベルと、前記データとを含む教師データを用いて、モデルを再学習し、
モデル送信手段は、
前記第1の識別手段が再学習された前記モデルを用いて導出した前記データの識別結果と、前記統合手段によって特定された前記データに対するラベルとが一致する場合に、再学習された前記モデルを第2の識別システムに送信する
請求項1に記載の識別システム。An integrating means for specifying a label for data identified by the first identifying means by integrating the identification results derived for each model stored in the second model storing means by the second identifying means; With
The learning means is
Using the label specified by the integrating means and teacher data including the data, re-learning the model,
The model transmission means
When the identification result of the data derived using the model re-learned by the first identification unit matches the label for the data specified by the integration unit, the re-learned model is The identification system according to claim 1, wherein the identification system is transmitted to a second identification system.
学習手段がモデルを再学習した場合に、所定時間内で、第1の識別手段が前記モデルを用いて導出した識別結果の正解率が、予め定められた閾値以上である場合に、前記モデルを第2の識別システムに送信する
請求項1に記載の識別システム。The model transmission means
When the learning unit re-learns the model, if the accuracy rate of the identification result derived by the first identification unit using the model within a predetermined time is equal to or greater than a predetermined threshold, the model is The identification system according to claim 1, wherein the identification system is transmitted to a second identification system.
前記第1のモデル記憶手段に記憶されている前記モデルを用いて、データが表わす物体を識別する第1の識別処理を実行し、
予め定められた複数の第1の識別システムで学習された個々のモデルをそれぞれ第2のモデル記憶手段に記憶させ、
前記第1の識別システムから当該第1の識別システムで学習されたモデルを受信した場合に、前記第2のモデル記憶手段に記憶されている前記第1の識別システムで学習されたモデルを、前記第1の識別システムから受信したモデルに更新し、
所定の場合に、前記第2のモデル記憶手段に記憶されている個々のモデル毎に、前記第1の識別処理で識別対象とした前記データが表わす物体を識別する第2の識別処理を実行し、
前記第2の識別処理で導出した識別結果に基づいて定まる前記データに対するラベルと、前記データとを含む教師データを用いて、モデルを再学習し、前記第1のモデル記憶手段に記憶されているモデルを再学習したモデルに更新し、
前記第1のモデル記憶手段に記憶されているモデルを、予め定められた1つまたは複数の第2の識別システムに送信する
ことを特徴とするモデル提供方法。Learning a model for identifying an object represented by the data using the teacher data, storing the model in first model storage means,
Executing a first identification process for identifying an object represented by data using the model stored in the first model storage means;
Individual models learned by a plurality of predetermined first identification systems are stored in second model storage means, respectively.
When a model learned by the first identification system is received from the first identification system, the model learned by the first identification system stored in the second model storage means is received. Update to the model received from the first identification system,
In a predetermined case, for each individual model stored in the second model storage means, a second identification process for identifying an object represented by the data to be identified in the first identification process is executed. ,
Using a label for the data determined based on the identification result derived in the second identification process and teacher data including the data, the model is re-learned and stored in the first model storage means. Update the model to the retrained model,
A model providing method, comprising: transmitting a model stored in the first model storage unit to one or more predetermined second identification systems.
データが表わす物体を識別するためのモデルを、教師データを用いて学習し、前記モデルを第1のモデル記憶手段に記憶させる学習処理、
前記第1のモデル記憶手段に記憶されている前記モデルを用いて、データが表わす物体を識別する第1の識別処理、
予め定められた複数の第1の識別システムで学習された個々のモデルをそれぞれ第2のモデル記憶手段に記憶させる処理、
前記第1の識別システムから当該第1の識別システムで学習されたモデルを受信した場合に、前記第2のモデル記憶手段に記憶されている前記第1の識別システムで学習されたモデルを、前記第1の識別システムから受信したモデルに更新するモデル更新処理、
所定の場合に、前記第2のモデル記憶手段に記憶されている個々のモデル毎に、前記第1の識別処理で識別対象とした前記データが表わす物体を識別する第2の識別処理、
前記第2の識別処理で導出した識別結果に基づいて定まる前記データに対するラベルと、前記データとを含む教師データを用いて、モデルを再学習し、前記第1のモデル記憶手段に記憶されているモデルを再学習したモデルに更新する再学習処理、および、
前記第1のモデル記憶手段に記憶されているモデルを、予め定められた1つまたは複数の第2の識別システムに送信するモデル送信処理
を実行させるためのモデル提供プログラム。On the computer,
A learning process of learning a model for identifying an object represented by the data using teacher data, and storing the model in a first model storage unit;
A first identification process for identifying an object represented by data using the model stored in the first model storage means;
A process of storing the individual models learned by the predetermined plurality of first identification systems in the second model storage means,
When a model learned by the first identification system is received from the first identification system, the model learned by the first identification system stored in the second model storage means is received. A model update process for updating the model received from the first identification system,
In a predetermined case, for each model stored in the second model storage means, a second identification process for identifying an object represented by the data set as an identification target in the first identification process;
Using a label for the data determined based on the identification result derived in the second identification process and teacher data including the data, a model is re-learned and stored in the first model storage unit. A re-learning process that updates the model to the re-learned model, and
A model providing program for executing a model transmission process of transmitting a model stored in the first model storage unit to one or more predetermined second identification systems.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2018/032761WO2020049636A1 (en) | 2018-09-04 | 2018-09-04 | Identification system, model presentation method, and model presentation program |
| JP2020540901AJP6981553B2 (en) | 2018-09-04 | 2018-09-04 | Identification system, model provision method and model provision program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2018/032761WO2020049636A1 (en) | 2018-09-04 | 2018-09-04 | Identification system, model presentation method, and model presentation program |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020049636A1true WO2020049636A1 (en) | 2020-03-12 |
Family
ID=69721469
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/032761CeasedWO2020049636A1 (en) | 2018-09-04 | 2018-09-04 | Identification system, model presentation method, and model presentation program |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6981553B2 (en) |
| WO (1) | WO2020049636A1 (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114286042A (en)* | 2020-09-28 | 2022-04-05 | 横河电机株式会社 | Monitoring equipment, learning device, method and recording medium |
| WO2022185596A1 (en)* | 2021-03-04 | 2022-09-09 | パナソニックIpマネジメント株式会社 | Estimation system, estimation method, and program |
| JP2022142555A (en)* | 2021-03-16 | 2022-09-30 | 日立造船株式会社 | Judgment system, image generation device, image generation method, and image generation program |
| JP2023032702A (en)* | 2021-08-27 | 2023-03-09 | 株式会社デンソーテン | Learning support device, learning support method, and learning support program |
| JP2023074197A (en)* | 2021-11-17 | 2023-05-29 | セコム株式会社 | Learning data generation device, learning data generation method and learning data generation program |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20080103996A1 (en)* | 2006-10-31 | 2008-05-01 | George Forman | Retraining a machine-learning classifier using re-labeled training samples |
| JP2015129988A (en)* | 2014-01-06 | 2015-07-16 | 日本電気株式会社 | Data processor |
| JP2017519282A (en)* | 2014-05-12 | 2017-07-13 | クゥアルコム・インコーポレイテッドQualcomm Incorporated | Distributed model learning |
- 2018
- 2018-09-04WOPCT/JP2018/032761patent/WO2020049636A1/ennot_activeCeased
- 2018-09-04JPJP2020540901Apatent/JP6981553B2/enactiveActive
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20080103996A1 (en)* | 2006-10-31 | 2008-05-01 | George Forman | Retraining a machine-learning classifier using re-labeled training samples |
| JP2015129988A (en)* | 2014-01-06 | 2015-07-16 | 日本電気株式会社 | Data processor |
| JP2017519282A (en)* | 2014-05-12 | 2017-07-13 | クゥアルコム・インコーポレイテッドQualcomm Incorporated | Distributed model learning |
Non-Patent Citations (1)
| Title |
|---|
| LEISTNER, C. ET AL.: "Visual on-line Learning in Distributed Camera Networks", 2008 SECOND ACM/ IEEE INTERNATIONAL CONFERENCE ON DISTRIBUTED SMART CAMERAS, 30 September 2008 (2008-09-30), pages 1 - 10, XP031329233, Retrieved from the Internet <URL:https://ieeexplore.ieee.org/abstract/document/4635700> [retrieved on 20181127]* |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114286042A (en)* | 2020-09-28 | 2022-04-05 | 横河电机株式会社 | Monitoring equipment, learning device, method and recording medium |
| WO2022185596A1 (en)* | 2021-03-04 | 2022-09-09 | パナソニックIpマネジメント株式会社 | Estimation system, estimation method, and program |
| JP2022142555A (en)* | 2021-03-16 | 2022-09-30 | 日立造船株式会社 | Judgment system, image generation device, image generation method, and image generation program |
| JP7557402B2 (en) | 2021-03-16 | 2024-09-27 | 日立造船株式会社 | Judgement system, image generation device, image generation method, and image generation program |
| JP2023032702A (en)* | 2021-08-27 | 2023-03-09 | 株式会社デンソーテン | Learning support device, learning support method, and learning support program |
| JP7696255B2 (en) | 2021-08-27 | 2025-06-20 | 株式会社デンソーテン | Learning support device, learning support method, and learning support program |
| JP2023074197A (en)* | 2021-11-17 | 2023-05-29 | セコム株式会社 | Learning data generation device, learning data generation method and learning data generation program |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6981553B2 (en) | 2021-12-15 |
| JPWO2020049636A1 (en) | 2021-05-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11222239B2 (en) | Information processing apparatus, information processing method, and non-transitory computer-readable storage medium | |
| WO2020049636A1 (en) | Identification system, model presentation method, and model presentation program | |
| EP1530157B1 (en) | Image matching system using 3-dimensional object model, image matching method, and image matching program | |
| JP6397379B2 (en) | CHANGE AREA DETECTION DEVICE, METHOD, AND PROGRAM | |
| KR101834778B1 (en) | Apparatus for recognizing traffic sign and method thereof | |
| US20240362746A1 (en) | Modifying sensor data using generative adversarial models | |
| JP6565600B2 (en) | Attention detection device and attention detection method | |
| JP6992883B2 (en) | Model delivery system, method and program | |
| US20230237774A1 (en) | Data collection system, sensor device, data collection device, and data collection method | |
| US11537814B2 (en) | Data providing system and data collection system | |
| US20210142064A1 (en) | Image processing apparatus, method of processing image, and storage medium | |
| JP7147753B2 (en) | Information processing device, information processing method, and program | |
| JP2019057815A (en) | Monitoring system | |
| CN106991147A (en) | A kind of Plant identification and recognition methods | |
| JP7001150B2 (en) | Identification system, model re-learning method and program | |
| JP6425405B2 (en) | INFORMATION PROCESSING APPARATUS, METHOD, AND PROGRAM | |
| JP2019046278A (en) | Information processor, control method, computer program, storage medium, and model creation device | |
| JP6981554B2 (en) | Identification system, parameter value update method and program | |
| JP7211495B2 (en) | Training data generator | |
| JP7211496B2 (en) | Training data generator | |
| US20220383631A1 (en) | Object recognition system and object recognition method | |
| CN119836647A (en) | Information processing device, information processing method, and program | |
| WO2025154700A1 (en) | Action classification device, action classification method, temporal attention determination model, program, and information processing system | |
| JP2025142552A (en) | PROGRAM, INFORMATION PROCESSING APPARATUS AND INFORMATION PROCESSING METHOD | |
| CN120510400A (en) | Method and apparatus for training machine learning model |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application | Ref document number:18932952 Country of ref document:EP Kind code of ref document:A1 | |
| ENP | Entry into the national phase | Ref document number:2020540901 Country of ref document:JP Kind code of ref document:A | |
| NENP | Non-entry into the national phase | Ref country code:DE | |
| 122 | Ep: pct application non-entry in european phase | Ref document number:18932952 Country of ref document:EP Kind code of ref document:A1 |