WO2018117593A1 - Gait training apparatus - Google Patents
Gait training apparatusDownload PDFInfo
- Publication number
- WO2018117593A1 WO2018117593A1PCT/KR2017/015017KR2017015017WWO2018117593A1WO 2018117593 A1WO2018117593 A1WO 2018117593A1KR 2017015017 WKR2017015017 WKR 2017015017WWO 2018117593 A1WO2018117593 A1WO 2018117593A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- walking
- trainer
- pelvis
- training
- main body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images



Classifications
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/40—Interfaces with the user related to strength training; Details thereof
- A63B21/4027—Specific exercise interfaces
- A63B21/4033—Handles, pedals, bars or platforms
- A63B21/4034—Handles, pedals, bars or platforms for operation by feet
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B22/00—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements
- A63B22/04—Exercising apparatus specially adapted for conditioning the cardio-vascular system, for training agility or co-ordination of movements with movable multiple steps, i.e. more than one step per limb, e.g. steps mounted on endless loops, endless ladders
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B24/00—Electric or electronic controls for exercising apparatus of preceding groups; Controlling or monitoring of exercises, sportive games, training or athletic performances
- A63B24/0087—Electric or electronic controls for exercising apparatus of groups A63B21/00 - A63B23/00, e.g. controlling load
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/20—Distances or displacements
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2220/00—Measuring of physical parameters relating to sporting activity
- A63B2220/80—Special sensors, transducers or devices therefor
- A63B2220/806—Video cameras
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S482/00—Exercise devices
- Y10S482/901—Exercise devices having computer circuitry
Definitions
- the present inventionrelates to a walking training apparatus for performing walking training.
- walkingIn general, walking is the most basic and necessary movement in everyday life. Therefore, walking training in patients who are unable to walk normally due to impaired nerve function due to illness or accident or unbalanced muscle development is the first gateway to returning the patient to daily life.
- the walking training deviceincludes an exoskeleton type walking training device.
- the exoskeleton type walking training devicemay be worn on the upper and lower body of the walking trainer to distribute the concentration of the walking trainer's weight on the lower leg, thereby providing a predetermined driving force, thereby reducing the burden on the walking trainer.
- the exoskeleton type walking training deviceprovides the driving force differently according to the joint angle of the walking trainer through an angle sensor measuring the angles of the hip, knee, and ankle joints so that the walking trainer can walk normally.
- the exoskeleton type walking training devicehas a problem that it takes a long time to wear or take off because the walking trainer must wear the exoskeleton equipment provided with the drive unit, the angle sensor.
- the walking training devicehas been developed as a seated type so that a walking trainer can sit and perform walking training without wearing the exoskeletal equipment in order to compensate for the problem of the exoskeletal walking training device.
- the walking training apparatusis composed of a saddle and a footrest, and is a structure for distributing and supporting the weight of the walking trainer to the saddle and the footrest.
- the walking trainerperforms the walking training by supporting the saddle and the footrest and rotating the footrest.
- the walking training apparatus according to the prior artdoes not have an angle sensor, it is difficult to measure the angle of the pelvis, knee, ankle, etc. of the walking trainer. Accordingly, there is an urgent need to develop a walking training apparatus that can easily sit and abscite and measure the training state of the walking trainer in real time by measuring angles of the pelvis, knee, ankle, etc. of the walking trainer.
- the present inventionhas been made to solve the problems described above, and to provide a gait training device that can be easily seated and selocated as well as to measure the angle of the pelvis, knee, ankle, etc. of the gait trainer.
- the present inventionmay include the following configuration.
- Walking training apparatusincludes a body for the walking trainee; A walking part rotatably coupled to the main body and supporting a foot of a walking trainer; An upper body support part coupled to the main body to be positioned at a position spaced apart from the walking part, and including a saddle mechanism supporting the pelvis of the walking trainer so that the load supported by the walking part is distributed; And a gait training image of a gait trainer supported by the upper body supporter to perform gait training, and a photographing unit for measuring angles of the pelvis, knee, and ankle.
- the photographing unitis an image photographing apparatus for photographing the walking training image of the walking trainer, and the distance measurement for measuring the distance to the pelvis, thigh, calf, foot of the walking trainer, respectively It may include an appliance.
- the distance measuring devicemay measure the distances to the pelvis, thighs, calves, and feet of the walking trainer according to a predetermined reference time interval.
- Walking training apparatusis a calculation unit for calculating the angle of the pelvis, knee, ankle with the distance value for the pelvis, thigh, calf, foot measured by the distance measuring device, and the calculation calculated by the calculation unit It may include a control unit for comparing the angle value with a predetermined reference joint angle value.
- Walking training apparatusmay include a support for supporting the photographing unit.
- the support partmay include an upper frame rotatably coupled to the main body, and an arm frame rotatably coupled to the upper frame.
- the photographing unitmay be rotatably coupled to the female frame.
- the photographing unitmay be coupled to the main body such that N pieces (N is an integer greater than 1) are spaced apart from each other.
- the present inventionis implemented so that the walking trainer can be easily seated and absent, thereby reducing the time taken to perform the walking training can increase the walking training time of the walking trainer.
- the present inventionis implemented to measure the angle of the pelvis, knee, ankle, etc. of the walking trainer, not only can measure the training status of the walking trainer in real time, but also collect the joint angle data of the walking trainer to analyze the degree of rehabilitation can do.
- FIG. 1is a schematic perspective view of a walking training apparatus according to the present invention
- FIG. 2is a schematic block diagram illustrating a photographing unit, a calculating unit, and a control unit in the walking training apparatus according to the present invention
- Figure 3is a schematic side view for explaining the upper frame in the walking training apparatus according to the present invention.
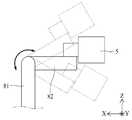
- Figure 6is a schematic perspective view for explaining a walking training apparatus according to another embodiment of the present invention.
- At least oneshould be understood to include all combinations which can be presented from one or more related items.
- the meaning of "at least one of the first item, the second item, and the third item"means not only the first item, the second item, or the third item, but also two of the first item, the second item, and the third item. A combination of all items that can be presented from more than one.
- FIG. 1is a schematic perspective view of a walking training apparatus according to the present invention
- FIG. 2is a schematic block diagram illustrating a photographing unit, a calculating unit, and a controller in the walking training apparatus according to the present invention
- FIG. 3is a walking according to the present invention.
- 4 and 5are schematic side views for explaining the upper frame in the training apparatus
- Fig. 6is a schematic side view for explaining the arm frame in the walking training apparatus according to the present invention
- Figure 6is a walking training apparatus according to another embodiment of the present invention It is a schematic perspective view for explaining.
- the walking training device 1is for measuring the angle of the pelvis, knee, ankle, etc. of the walking trainer performing the walking training.
- the gait training apparatus 1 according to the present inventionis a gait trainer by continuously measuring the spaced apart distance to the pelvis, thigh, calf, foot continuously changing between gait training in real time, pelvis, knee, The angle of ankle etc. can be measured.
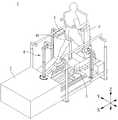
- the walking training apparatus 1includes a main body 2, a walking part 3, an upper body support part 4, and a photographing part 5.
- a walking trainercan mean not only a patient with hemiplegia, but also a person who cannot support all of his or her weight, such as a patient who is not free to walk due to brain or nerve damage.
- the walking training apparatus 1 according to the present inventionis implemented to allow a walking trainer to sit and perform walking training, thereby reducing the burden that the walking trainer receives during walking training by partially paying the weight of the walking trainer.
- the main body 2is for a walking trainer to board.
- the main body 2may be installed at the bottom.
- the main body 2may support the walking trainer who is supported on the floor.
- the main body 2may be formed in a rectangular plate shape as a whole, and may have a thickness such that the walking trainer is located at a position spaced a predetermined distance from the floor. Accordingly, the walking trainer may perform walking training at a position spaced from the floor.
- the walker part 3, the upper body support part 4, and the photographing part 5may be coupled to the main body 2.
- the main body 2may be coupled to the handle for allowing the walking trainer to climb on the walking portion (3) by hand.
- the main body 2may be detachably coupled to the inclined plate is formed to be inclined so that the wheelchair can rise.
- the inclined platemay be coupled to the other side opposite to one side of the main body 2 to which the upper support 4 is coupled.
- NN is an integer greater than 1
- the photographing unit 5may be coupled to the main body 2 so as to be located at positions spaced apart from each other.
- the walking part 3is for supporting a foot of a walking trainer.
- the walking unit 3may support the foot of the walking trainer by riding the walking trainer.
- the walking unit 3is installed in a pair of left and right so as to support the left and right feet of the walking trainer, respectively.
- the walking unit 3is installed at a low position so that a weak walking trainer, such as a hemiplegic walking trainer or an elderly person, can easily ride.
- the walking part 3may be formed in a rectangular plate shape as a whole, but is not limited thereto, and may be formed in another shape such as an ellipse if the walking trainer supports the foot and stably performs the walking training.
- the walking part 3may be rotatably coupled to the main body 2.
- the walking unit 3may rotate to reinforce and relax the muscles required for walking by repeatedly walking and relaxing the muscles required for the walking trainer.
- the walking unit 3may be rotated so that the walking trainer can also train parts related to the brain and nerves such as reflexes to maintain body balance required for walking.
- the walking part 3may rotate to be positioned at a position opposite to right and left.
- the walking part 3may be rotated such that the left and right are simultaneously positioned in the forward direction toward the upper body support part 4 or the backward direction toward the inclined plate.
- the walking part 3may rotate to have a walking trajectory in the form of a droplet lying on its side.
- the walking part 3may be implemented to have three degrees of freedom, so that the walking part 3 may rotate as a walking trajectory in the form of a droplet.
- the walking trajectorymay vary according to various modes such as an uphill mode for climbing stairs, a downhill mode for descending stairs, a flat mode for walking flat land, an uphill, a downhill, a mixed mode for mixing flat land.
- the walking part 3is implemented to have three or more rotation shafts, the walking part 3 may rotate to have various walking trajectories of three or more degrees of freedom. Accordingly, the walking trainer can strengthen muscles for various situations, such as moving the feet individually or simultaneously.
- the walking part 3may be rotated by a walking driving part (not shown) including a motor, a cylinder, and a belt.
- the upper body support part 4is for distributing the load supported by the walking part 3.
- the upper body support part 4may be coupled to the main body 2 so as to be positioned at a position spaced apart from the walking part 3.
- the upper support 4may be coupled to the main body 2 so as to be located forward from the main body 2 with respect to the X-axis direction (shown in FIG. 1). Accordingly, the upper body support 4 may not interfere with the rotation of the walking part 3.
- the upper body support 4may be formed in a long rod shape in the Z-axis direction (shown in FIG. 1).
- the upper body support portion 4is a chest support mechanism for supporting the chest of the walking trainer, a belt mechanism coupled to the chest support mechanism for fixing the upper body of the walking trainer, and a handle mechanism that can be held by the walking trainer It may include.
- the upper body support portion 4may further include a saddle mechanism 41 for supporting the pelvis of the walking trainer. Accordingly, the upper body support part 4 may distribute the load supported by the walking part 3 by partially supporting the weight of the walking trainer.
- the saddle mechanism 41is for supporting the pelvis so that the walking trainer who sits on the walking part 3 can sit.
- the saddle mechanism 41may be formed to protrude from the upper support portion 4 toward the inclined plate relative to the X-axis direction. Accordingly, the walking trainer can sit on the saddle mechanism 41 and roll both feet. In this case, the walking part 3 may be located below the saddle mechanism 41.
- the saddle mechanism 41may be formed in the form of a saddle of the bicycle, but may be formed in other forms as long as it can support the pelvis of the walking trainer.
- the saddle mechanism 41may not support the walking trainer when the walking trainer performs the walking training because the walking ability of the walking trainer is improved. Accordingly, since the walking training apparatus 1 according to the present invention can perform walking training by sitting on the saddle mechanism 41 and stop the walking training by taking place from the saddle mechanism 41, By easily sitting on the saddle mechanism 41 or being absent, the walking training can be easily performed or stopped.
- the photographing unit 5is for acquiring a walking training image of a walking trainer who performs walking training, and for measuring angles of the pelvis, knee, and ankle of the walking trainer.
- the photographing unit 5is installed to photograph a walking trainer who rides on the walking part 3.
- the photographing unit 5may photograph the walking trainer by installing the photographing area to face the walking trainer.
- the photographing unit 5may photograph the walking trainer in a direction from the upper side to the lower side with respect to the Z axis.
- the photographing unit 5may photograph the walking trainer in a direction from the lower side to the upper side based on the Z axis.
- the photographing unit 5may be coupled to the main body 8 by a supporting unit 8 to be described later.
- the photographing unit 5may acquire a walking training image of a walking trainer who performs walking training by walking on the walking unit 3.
- the photographing unit 5may be provided with N (N is an integer greater than 1) in the main body 2 to photograph the walking trainer from various angles.
- Nis an integer greater than 1
- two or more imaging units 5may be installed.
- the photographing unit 5may be installed spaced apart from each other on the main body 2 and installed toward the walking trainer.
- the three imaging units 5when three imaging units 5 are installed, the three imaging units 5 may be spaced apart from each other by the same distance from the walking trainer.
- the three photographing units 5may be installed on the main body 2 to be spaced apart from each other at intervals of 120 degrees with respect to the walking trainer. Referring to FIG.
- the four photographing units 5when four photographing units 5 are installed, the four photographing units 5 are spaced apart from each other by the same distance around the walking trainer and spaced apart from each other at 90 degree intervals. It may be installed in the main body (2). In this case, all of the photographing units 5 may be installed toward the walking trainer for acquiring a walking training image of the walking trainer and angle measurement.
- the photographing unit 5may be an RGB camera.
- the photographing unit 5may include an image photographing device 51 and a distance measuring device 52.
- the image photographing mechanism 51is for photographing a walking training image of a walking trainer.
- the image capturing apparatus 51may be fixedly installed by the support unit 8, thereby photographing an image of a walking trainee walking training in a fixed photographing area.
- the image capturing apparatus 51is rotatably installed in the support part 8 to change the photographing area according to the height, physique, and weight of the walking trainer.
- the image capturing mechanism 51may be rotated by an operator or rotated by a driving device such as a motor. Accordingly, the image photographing mechanism 51 may photograph the walking training image of the walking trainer.
- the distance measuring mechanism 52may also rotate.
- the image capturing apparatus 51may be connected to a display device (not shown) displaying the captured image by at least one of wired communication and wireless communication. Accordingly, the image capturing apparatus 51 may transmit the captured walking training image to the display apparatus.
- the walking trainermay modify a walking posture and the like in real time while watching his walking training image displayed through the display device.
- the walking trainermay view various images transmitted from the plurality of image photographing devices 51. For example, the walking trainer may view at least one of a front image, a side image, a rear image, and a diagonal image of his / her walking training through the display device.
- the gait training apparatus 1allows the gait trainer to see the gait training posture in real time from various angles, thereby modifying the gait posture to the right gait posture, thereby shortening the gait training recovery period.
- the image photographing device 51may be connected to a storage device capable of storing an image by at least one of wired communication and wireless communication, thereby providing a walking training image to the storage device. Accordingly, the storage device may store a walking training image of the walking trainer.
- the distance measuring mechanism 52is for measuring the spaced apart distance to the pelvis, thigh, calf, foot of the walking trainer, respectively.
- the distance measuring device 52may be coupled to the support part 8 together with the image photographing device 51. In this case, the distance measuring device 52 may be located at a position spaced apart from the image photographing device 51.
- the pelvis, thigh, calf, and foot of the walking trainermay continuously change positions.
- the distance measuring device 52may measure the spaced apart distances to the pelvis, thighs, calves, and feet of the walking trainer according to a predetermined reference time interval.
- the reference time intervalrefers to the unit time that the walking trainer walk training.
- the reference time intervalmay be preset by an operator.
- the reference time intervalmay be 1 second.
- the distance measuring device 52may measure the spaced apart distance of the pelvis, thighs, calves, and feet of the walking trainer, whose position changes every second. Between 1 second, 5 frames, 10 frames, and 30 frames may be included. As the performance of the distance measuring device 52 is better, the number of frames per second may be increased.
- the distance measuring mechanism 52may provide the computing unit 6 to be described later with the separation distance of each pelvis, thigh, calf, and foot of the walking trainer, measured every second.
- the distance measuring mechanism 52may be connected to the operation unit 6 by at least one of wired communication and wireless communication, thereby providing the measured separation distance value to the operation unit 6.
- the walking training apparatus 1may include a calculator 6 and a controller 7.
- the calculation unit 6is for calculating the angle of the pelvis, knee, ankle of the walking trainer.
- the calculating part 6receives the distance values of the pelvis, the thigh, the calf, and the foot of the walking trainer from the distance measuring device 52 in real time, and the pelvis of the walking trainer through an algorithm previously input by the operator.
- the angles of the knee, ankle, and anklecan be calculated.
- the calculation unit 6may be connected to the control unit 7 by at least one of wired communication and wireless communication. Accordingly, the calculating unit 6 may provide the control unit 7 with the calculated angle values for each of the pelvis, knee, and ankle of the walking trainer.
- the controller 7is for comparing the calculated angle value calculated by the calculator 6 with a predetermined reference joint angle value.
- the reference joint angle valuerefers to a value of measuring the angles of the pelvis, knee, and ankle of a normal person who is similar in height, physique, and weight to a walking trainer, and may be previously measured by an operator and stored in the controller 7. .
- the reference joint angle value stored in the controller 7may include various joint angle values according to various factors such as height, physique, and weight of a normal person.
- the controller 7may be connected to the display device by at least one of wired communication and wireless communication. Accordingly, the control unit 7 may receive the calculated angle value from the calculation unit 6 and compare it with a preset reference joint angle value to provide an error value to the display device.
- the display devicemay display a walking trainer to view the error value in real time. As the error value is smaller, it may be determined that the walking trainer is closer to the walking of a normal person. In this case, the walking training apparatus 1 according to the present invention may further increase the strength of walking training, such as increasing the rotation speed of the walking portion 3. As the error value increases, the walking trainer may be determined to be farther away from walking of a normal person. In this case, the walking training apparatus 1 according to the present invention may further lower the strength of walking training, such as reducing the rotational speed of the walking portion 3. Therefore, since the walking training apparatus 1 according to the present invention can know the walking training results of the walking trainer in real time during the walking training, it can not only increase the satisfaction for the walking training but also prevent the walking training by force. Safety accidents such as falls can be prevented.
- the operation unit 6 and the control unit 7may be installed to be connected to the storage device, thereby providing walking training data for the walking trainer to the storage device.
- the storage devicemay store a walking training image and a walking training data for the walking trainer. Walking training images and walking training data stored in the storage device may be used to analyze the degree of rehabilitation for the walking trainer.
- the walking training device 1may comprise a support 8.
- the support part 8is for supporting the photographing part 3.
- One side of the support part 8may be coupled to the main body 2, and the other side thereof may be coupled to the photographing part 3. Accordingly, the support part 8 may be supported by the main body 2 to support the photographing part 3.
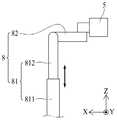
- the support part 8may include an upper frame 81 and an female frame 82.
- the upper frame 81may be rotatably coupled to the body 2.
- the upper frame 81may be coupled to the main body 2 to be positioned in a direction parallel to the Z axis.
- the upper frame 81may rotate about a rotation axis parallel to the Z axis. Accordingly, the direction in which the photographing unit 3 photographs may be changed.
- the upper frame 81may include a first support member 811 and a second support member 812.
- the first support member 811may be rotatably coupled to the main body 2.
- the second support member 812may be coupled to the other side of the first support member 811. In this case, the second support member 812 may be coupled to be inserted into the first support member 811.
- the first support member 811may be formed in the shape of a hollow square, but is not limited thereto. If the second support member 812 is insertably coupled, the first support member 811 may be formed in another shape such as a cylinder. have.
- the first support member 811may be formed of a metal material, but may also be formed of a plastic material for weight reduction.
- One side of the second support member 812may be coupled to be inserted into the first support member 811.
- the female frame 82may be rotatably coupled to the other side of the second support member 812.
- the second supporting member 812may be inserted into the first supporting member 811 to increase or shorten an overlapping length overlapping with the first supporting member 811.
- the overlapping length of the second support member 812 overlapping with the first support member 811may be changed by an operator, but the overlapping length may be changed through a driving device such as a motor.
- the overlap lengthis increased, the length of the upper frame 81 may be reduced. Accordingly, the height of the photographing unit 5 photographing the walking trainer may be lowered.
- the photographing unit 5may photograph the walking trainer in a direction from the lower side to the upper side as shown in FIG. 6.
- the length of the upper frame 81may be increased. Accordingly, the height of the photographing unit 5 for photographing the walking trainer can be increased.
- the photographing unit 5may photograph the walking trainer in a direction from the upper side to the lower side as shown in FIG. 1.
- the second support member 812may be formed of a metal material, but may also be formed of a plastic material for weight reduction.
- the female frame 82may be rotatably coupled to the second support member 812.
- the female frame 82may be coupled to the second support member 812 to protrude in the X-axis direction.
- One side of the arm frame 82may be coupled to the second support member 812, and the other side of the arm frame 82 may be rotatably coupled thereto.
- the female frame 82may rotate about a rotation axis parallel to the Y axis. Accordingly, the direction in which the photographing unit 3 photographs may be changed. For example, when the arm frame 82 rotates clockwise, the photographing unit 3 may change the photographing area in a direction from the upper side to the lower side.
- the photographing unit 3may change the photographing area from the lower side to the upper side.
- the photographing unit 3may be rotatably coupled to the female frame 82. Referring to FIG. 5, the photographing unit 3 may rotate clockwise or counterclockwise. When the photographing unit 3 rotates clockwise with respect to the arm frame 82, the photographing unit 3 may photograph the right region based on the support unit 8. When the photographing unit 3 rotates counterclockwise with respect to the female frame 82, the photographing unit 3 may photograph the left region based on the support unit 8.
- the walking training apparatus 1has various heights and physiques by adjusting at least one direction of the upper frame 81, the arm frame 82, and the photographing unit 5. Walking training images for walking trainers and angles of the pelvis, knee and ankle can be measured. Therefore, the walking training apparatus 1 according to the present invention does not need to newly install the upper frame 81 and the arm frame 82 according to the height and the physique of the walking trainer whenever the walking trainer changes. It is possible to reduce the installation cost for walking training because it is not only necessary to advance the walking training time, but also have the upper frame 81 and the arm frame 82 having various lengths.
Landscapes
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Physical Education & Sports Medicine (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biophysics (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Cardiology (AREA)
- Vascular Medicine (AREA)
- Rehabilitation Tools (AREA)
Abstract
Description
Translated fromKorean본 발명은 보행 훈련을 수행하기 위한 보행 훈련 장치에 관한 것이다.The present invention relates to a walking training apparatus for performing walking training.
일반적으로 사람에게 있어 보행은 일상생활에서 가장 기초적이면서 필수적인 동작이다. 그러므로, 질병이나 사고로 인해 신경 기능의 손상을 입거나 근육의 불균형 발달로 인해 정상적으로 걷지 못하는 환자들에게 보행 훈련을 실시하는 것은, 그 환자가 일상생활로 복귀할 수 있도록 하는 첫번째 관문이 된다.In general, walking is the most basic and necessary movement in everyday life. Therefore, walking training in patients who are unable to walk normally due to impaired nerve function due to illness or accident or unbalanced muscle development is the first gateway to returning the patient to daily life.
이러한 보행 훈련 장치에는 외골격(Exoskeleton)형 보행 훈련 장치가 있다. 외골격형 보행 훈련 장치는 보행 훈련자의 체중이 하지에 집중되는 것을 분산시키기 위해 보행훈련자의 상체 및 하체에 착용되어 소정의 구동력을 제공함으로써, 보행훈련자가 받는 부담을 감소시킬 수 있다. 이러한 외골격형 보행 훈련 장치는 엉덩이와 무릎, 발목 관절의 각도를 측정하는 각도센서를 통해 보행 훈련자의 관절 각도에 따라 구동력을 다르게 제공하여 보행 훈련자가 정상적인 보행을 하도록 한다. 그러나, 외골격형 보행 훈련 장치는 보행 훈련자가 구동부, 각도센서가 설치된 외골격 장비를 착용해야 하므로, 착용하거나 벗는데 오랜 시간이 걸리는 문제가 있다.The walking training device includes an exoskeleton type walking training device. The exoskeleton type walking training device may be worn on the upper and lower body of the walking trainer to distribute the concentration of the walking trainer's weight on the lower leg, thereby providing a predetermined driving force, thereby reducing the burden on the walking trainer. The exoskeleton type walking training device provides the driving force differently according to the joint angle of the walking trainer through an angle sensor measuring the angles of the hip, knee, and ankle joints so that the walking trainer can walk normally. However, the exoskeleton type walking training device has a problem that it takes a long time to wear or take off because the walking trainer must wear the exoskeleton equipment provided with the drive unit, the angle sensor.
종래 기술에 따른 보행 훈련 장치는 외골격형 보행 훈련 장치의 문제점을 보완하기 위해 보행 훈련자가 외골격 장비를 착용하지 않고, 앉아서 보행 훈련을 수행하도록 착석형으로 개발되었다. 종래 기술에 따른 보행 훈련 장치는 안장과 발판으로 구성되고, 보행 훈련자의 체중을 안장과 발판으로 분산하여 지지하는 구조이다. 보행 훈련자는 안장과 발판에 지지되어 발판을 회전시킴으로써, 보행 훈련을 수행한다. 그러나, 종래 기술에 따른 보행 훈련 장치는 각도센서가 없으므로, 보행 훈련자의 골반, 무릎, 발목 등의 각도를 측정하기 어려운 문제가 있다. 이에 따라, 착석 및 탈석이 용이할 뿐만 아니라, 보행 훈련자의 골반, 무릎, 발목 등의 각도를 측정하여 보행 훈련자의 훈련 상태를 실시간으로 측정할 수 있는 보행 훈련 장치의 개발이 절실히 필요하다.The walking training device according to the prior art has been developed as a seated type so that a walking trainer can sit and perform walking training without wearing the exoskeletal equipment in order to compensate for the problem of the exoskeletal walking training device. The walking training apparatus according to the prior art is composed of a saddle and a footrest, and is a structure for distributing and supporting the weight of the walking trainer to the saddle and the footrest. The walking trainer performs the walking training by supporting the saddle and the footrest and rotating the footrest. However, since the walking training apparatus according to the prior art does not have an angle sensor, it is difficult to measure the angle of the pelvis, knee, ankle, etc. of the walking trainer. Accordingly, there is an urgent need to develop a walking training apparatus that can easily sit and abscite and measure the training state of the walking trainer in real time by measuring angles of the pelvis, knee, ankle, etc. of the walking trainer.
본 발명은 상술한 바와 같은 문제를 해결하고자 안출된 것으로, 착석 및 탈석이 용이할 뿐만 아니라 보행 훈련자의 골반, 무릎, 발목 등의 각도를 측정할 수 있는 보행 훈련 장치를 제공하기 위한 것이다.The present invention has been made to solve the problems described above, and to provide a gait training device that can be easily seated and selocated as well as to measure the angle of the pelvis, knee, ankle, etc. of the gait trainer.
상술한 바와 같은 과제를 해결하기 위해, 본 발명은 하기와 같은 구성을 포함할 수 있다.In order to solve the problem as described above, the present invention may include the following configuration.
본 발명에 따른 보행 훈련 장치는 보행 훈련자가 탑승하기 위한 본체; 상기 본체에 회전 가능하게 결합되고, 보행 훈련자의 발을 지지하기 위한 보행부; 상기 보행부와 이격된 위치에 위치하도록 상기 본체에 결합되고, 상기 보행부가 지지하는 하중이 분산되도록 보행 훈련자의 골반을 지지하는 안장기구를 포함하는 상체지지부; 및 상기 상체지지부에 지지되어 보행 훈련을 수행하는 보행 훈련자의 보행 훈련 영상 획득, 및 골반, 무릎, 발목의 각도를 측정하기 위한 촬영부를 포함할 수 있다.Walking training apparatus according to the present invention includes a body for the walking trainee; A walking part rotatably coupled to the main body and supporting a foot of a walking trainer; An upper body support part coupled to the main body to be positioned at a position spaced apart from the walking part, and including a saddle mechanism supporting the pelvis of the walking trainer so that the load supported by the walking part is distributed; And a gait training image of a gait trainer supported by the upper body supporter to perform gait training, and a photographing unit for measuring angles of the pelvis, knee, and ankle.
본 발명에 따른 보행 훈련 장치에 있어서, 상기 촬영부는 보행 훈련자의 보행 훈련 영상을 촬영하기 위한 영상촬영기구, 및 보행 훈련자의 골반, 대퇴부, 종아리, 발까지의 이격된 거리를 각각 측정하기 위한 거리측정기구를 포함할 수 있다.In the walking training apparatus according to the present invention, the photographing unit is an image photographing apparatus for photographing the walking training image of the walking trainer, and the distance measurement for measuring the distance to the pelvis, thigh, calf, foot of the walking trainer, respectively It may include an appliance.
본 발명에 따른 보행 훈련 장치에 있어서, 상기 거리측정기구는 기설정된 기준시간간격에 따라 보행 훈련자의 골반, 대퇴부, 종아리, 발까지의 이격된 거리를 측정할 수 있다.In the walking training device according to the present invention, the distance measuring device may measure the distances to the pelvis, thighs, calves, and feet of the walking trainer according to a predetermined reference time interval.
본 발명에 따른 보행 훈련 장치는 상기 거리측정기구가 측정한 골반, 대퇴부, 종아리, 발에 대한 각각의 이격거리값으로 골반, 무릎, 발목의 각도를 산출하기 위한 연산부, 및 상기 연산부가 산출한 산출각도값을 기설정된 기준관절각도값과 비교하기 위한 제어부를 포함할 수 있다.Walking training apparatus according to the present invention is a calculation unit for calculating the angle of the pelvis, knee, ankle with the distance value for the pelvis, thigh, calf, foot measured by the distance measuring device, and the calculation calculated by the calculation unit It may include a control unit for comparing the angle value with a predetermined reference joint angle value.
본 발명에 따른 보행 훈련 장치는 상기 촬영부를 지지하기 위한 지지부를 포함할 수 있다. 상기 지지부는 상기 본체에 회전 가능하게 결합되는 어퍼프레임, 및 상기 어퍼프레임에 회전 가능하게 결합되는 암프레임를 포함할 수 있다. 상기 촬영부는 상기 암프레임에 회전 가능하게 결합될 수 있다.Walking training apparatus according to the present invention may include a support for supporting the photographing unit. The support part may include an upper frame rotatably coupled to the main body, and an arm frame rotatably coupled to the upper frame. The photographing unit may be rotatably coupled to the female frame.
본 발명에 따른 보행 훈련 장치에 있어서, 상기 촬영부는 N개(N은 1보다 큰 정수)가 서로 이격되게 상기 본체에 결합될 수 있다.In the walking training apparatus according to the present invention, the photographing unit may be coupled to the main body such that N pieces (N is an integer greater than 1) are spaced apart from each other.
본 발명에 따르면, 다음과 같은 효과를 얻을 수 있다.According to the present invention, the following effects can be obtained.
본 발명은 보행 훈련자가 용이하게 착석 및 탈석할 수 있도록 구현됨으로써, 보행 훈련을 수행하기까지 걸리는 시간을 단축시켜 보행 훈련자의 보행 훈련 시간을 증대시킬 수 있다.The present invention is implemented so that the walking trainer can be easily seated and absent, thereby reducing the time taken to perform the walking training can increase the walking training time of the walking trainer.
본 발명은 보행 훈련자의 골반, 무릎, 발목 등의 각도를 측정할 수 있도록 구현됨으로써, 보행 훈련자의 훈련 상태를 실시간으로 측정할 수 있을 뿐만 아니라 보행 훈련자의 관절 각도 데이터를 수집하여 재활의 정도를 분석할 수 있다.The present invention is implemented to measure the angle of the pelvis, knee, ankle, etc. of the walking trainer, not only can measure the training status of the walking trainer in real time, but also collect the joint angle data of the walking trainer to analyze the degree of rehabilitation can do.
도 1은 본 발명에 따른 보행 훈련 장치의 개략적인 사시도1 is a schematic perspective view of a walking training apparatus according to the present invention
도 2는 본 발명에 따른 보행 훈련 장치에서 촬영부, 연산부, 및 제어부를 설명하기 위한 개략적인 블록도2 is a schematic block diagram illustrating a photographing unit, a calculating unit, and a control unit in the walking training apparatus according to the present invention;
도 3은 본 발명에 따른 보행 훈련 장치에서 어퍼프레임을 설명하기 위한 개략적인 측면도Figure 3 is a schematic side view for explaining the upper frame in the walking training apparatus according to the present invention
도 4 및 5는 본 발명에 따른 보행 훈련 장치에서 암프레임을 설명하기 위한 개략적인 측면도4 and 5 is a schematic side view for explaining the arm frame in the walking training apparatus according to the present invention
도 6은 본 발명의 다른 실시예에 따른 보행 훈련 장치를 설명하기 위한 개략적인 사시도Figure 6 is a schematic perspective view for explaining a walking training apparatus according to another embodiment of the present invention
본 명세서에서 각 도면의 구성요소들에 참조번호를 부가함에 있어서 동일한 구성 요소들에 한해서는 비록 다른 도면상에 표시되더라도 가능한 한 동일한 번호를 가지도록 하고 있음에 유의하여야 한다.In the present specification, in adding reference numerals to the components of each drawing, it should be noted that the same components have the same number as much as possible even though they are displayed on different drawings.
한편, 본 명세서에서 서술되는 용어의 의미는 다음과 같이 이해되어야 할 것이다.On the other hand, the meaning of the terms described herein will be understood as follows.
단수의 표현은 문맥상 명백하게 다르게 정의하지 않는 한 복수의 표현을 포함하는 것으로 이해되어야 하고, "제1", "제2" 등의 용어는 하나의 구성요소를 다른 구성요소로부터 구별하기 위한 것으로, 이들 용어들에 의해 권리범위가 한정되어서는 아니 된다.Singular expressions should be understood to include plural expressions unless the context clearly indicates otherwise, and the terms “first”, “second”, etc. are used to distinguish one component from another. The scope of the rights shall not be limited by these terms.
"포함하다" 또는 "가지다" 등의 용어는 하나 또는 그 이상의 다른 특징이나 숫자, 단계, 동작, 구성요소, 부분품 또는 이들을 조합한 것들의 존재 또는 부가 가능성을 미리 배제하지 않는 것으로 이해되어야 한다.It is to be understood that the term "comprises" or "having" does not preclude the existence or addition of one or more other features or numbers, steps, operations, components, parts or combinations thereof.
"적어도 하나"의 용어는 하나 이상의 관련 항목으로부터 제시 가능한 모든 조합을 포함하는 것으로 이해되어야 한다. 예를 들어, "제1항목, 제2항목 및 제3항목 중에서 적어도 하나"의 의미는 제1항목, 제2항목 또는 제3항목 각각 뿐만 아니라 제1항목, 제2항목 및 제3항목 중에서 2개 이상으로부터 제시될 수 있는 모든 항목의 조합을 의미한다.The term "at least one" should be understood to include all combinations which can be presented from one or more related items. For example, the meaning of "at least one of the first item, the second item, and the third item" means not only the first item, the second item, or the third item, but also two of the first item, the second item, and the third item. A combination of all items that can be presented from more than one.
이하에서는 본 발명에 따른 보행 훈련 장치에 관해 첨부된 도면을 참조하여 구체적으로 설명한다.Hereinafter, a walking training apparatus according to the present invention will be described in detail with reference to the accompanying drawings.
도 1은 본 발명에 따른 보행 훈련 장치의 개략적인 사시도, 도 2는 본 발명에 따른 보행 훈련 장치에서 촬영부, 연산부, 및 제어부를 설명하기 위한 개략적인 블록도, 도 3은 본 발명에 따른 보행 훈련 장치에서 어퍼프레임을 설명하기 위한 개략적인 측면도, 도 4 및 5는 본 발명에 따른 보행 훈련 장치에서 암프레임을 설명하기 위한 개략적인 측면도, 도 6은 본 발명의 다른 실시예에 따른 보행 훈련 장치를 설명하기 위한 개략적인 사시도이다.1 is a schematic perspective view of a walking training apparatus according to the present invention, FIG. 2 is a schematic block diagram illustrating a photographing unit, a calculating unit, and a controller in the walking training apparatus according to the present invention, and FIG. 3 is a walking according to the present invention. 4 and 5 are schematic side views for explaining the upper frame in the training apparatus, Fig. 6 is a schematic side view for explaining the arm frame in the walking training apparatus according to the present invention, Figure 6 is a walking training apparatus according to another embodiment of the present invention It is a schematic perspective view for explaining.
도 1 내지 도 6을 참고하면, 본 발명에 따른 보행 훈련 장치(1)는 보행 훈련을 수행하는 보행훈련자의 골반, 무릎, 발목 등의 각도를 측정하기 위한 것이다. 특히, 본 발명에 따른 보행 훈련 장치(1)는 보행 훈련자가 보행 훈련 간에 계속적으로 변화하는 골반, 대퇴부, 종아리, 발까지의 이격된 이격거리를 실시간으로 각각 측정함으로써, 보행훈련자의 골반, 무릎, 발목 등의 각도를 측정할 수 있다.1 to 6, the
이를 위해, 본 발명에 따른 보행 훈련 장치(1)는 크게 본체(2), 보행부(3), 상체지지부(4), 및 촬영부(5)를 포함한다.To this end, the
보행 훈련자는 편마비가 발생한 환자 뿐만 아니라, 뇌나 신경 손상으로 인해 보행이 자유롭지 못한 환자처럼 자신의 체중을 전부 지지할 수 없는 사람을 의미할 수 있다. 본 발명에 따른 보행 훈련 장치(1)는 보행 훈련자가 앉아서 보행 훈련을 수행할 수 있도록 구현됨으로써, 보행 훈련자의 체중을 일부 부담하여 보행 훈련자가 보행 훈련 시 받는 부담을 줄일 수 있다.A walking trainer can mean not only a patient with hemiplegia, but also a person who cannot support all of his or her weight, such as a patient who is not free to walk due to brain or nerve damage. The
이하에서는 상기 본체(2), 상기 보행부(3), 상기 상체지지부(4), 및 상기 촬영부(5)에 관해 첨부된 도면을 참조하여 구체적으로 설명한다.Hereinafter, the
도 1 내지 도 6을 참고하면, 상기 본체(2)는 보행 훈련자가 탑승하기 위한 것이다. 상기 본체(2)는 바닥에 설치될 수 있다. 상기 본체(2)는 바닥에 지지되어 탑승한 보행 훈련자를 지지할 수 있다. 상기 본체(2)는 전체적으로 사각판형으로 형성되고, 보행 훈련자가 바닥으로부터 소정 거리 이격된 위치에 위치하도록 두께를 갖도록 형성될 수 있다. 이에 따라, 보행 훈련자는 바닥으로부터 이격된 위치에서 보행 훈련을 수행할 수 있다. 상기 본체(2)에는 보행부(3), 상체지지부(4), 및 촬영부(5)가 결합될 수 있다. 또한, 상기 본체(2)에는 보행 훈련자가 손으로 잡고 상기 보행부(3)에 올라서도록 하기 위한 손잡이부가 결합될 수 있다. 도시되지 않았지만, 상기 본체(2)에는 휠체어가 올라올 수 있도록 경사지게 형성되는 경사판이 탈부착 가능하게 결합될 수 있다. 상기 경사판은 상기 상체지지부(4)가 결합되는 본체(2)의 일측과 반대되는 타측에 결합될 수 있다. 상기 촬영부(5)는 N(N은 1보다 큰 정수)개가 결합될 경우, 서로 이격된 위치에 위치하도록 상기 본체(2)에 결합될 수 있다.1 to 6, the
상기 보행부(3)는 보행 훈련자의 발을 지지하기 위한 것이다. 상기 보행부(3)는 보행 훈련자가 탑승함으로써, 보행 훈련자의 발을 지지할 수 있다. 상기 보행부(3)는 보행 훈련자의 왼쪽 발과 오른쪽 발을 각각 지지할 수 있도록 좌우 한 쌍으로 설치된다. 상기 보행부(3)는 편마비가 있는 보행 훈련자나 노약자 등 쇠약한 보행 훈련자가 용이하게 탑승할 수 있도록 낮은 위치에 설치된다. 상기 보행부(3)는 전체적으로 사각판형으로 형성될 수 있으나, 이에 한정되지 않으며 보행 훈련자가 발을 지지하여 안정적으로 보행 훈련을 수행할 수 있으면 타원형 등 다른 형태로 형성될 수도 있다. 상기 보행부(3)는 상기 본체(2)에 회전 가능하게 결합될 수 있다. 상기 보행부(3)는 회전함으로써 상기 보행 훈련자가 보행에 필요한 근육들을 반복적으로 수축, 이완시켜 보행에 필요한 근육을 강화시킬 수 있다. 또한, 상기 보행부(3)는 회전함으로써 보행 훈련자가 보행에 필요한 신체균형을 유지하려는 반사작용 등 뇌, 신경과 관련된 부분도 훈련되도록 할 수 있다. 상기 보행부(3)는 좌우가 상반된 위치에 위치하도록 회전할 수 있다. 상기 보행부(3)는 좌우가 동시에 상체지지부(4)를 향하는 전진방향 또는 경사판을 향하는 후진방향에 위치하도록 회전할 수도 있다. 상기 보행부(3)는 옆으로 눕힌 물방울 형태의 보행 궤적을 갖도록 회전할 수 있다. 예컨대, 상기 보행부(3)는 3자유도를 갖도록 구현됨으로써, 물방울 형태의 보행 궤적으로 회전할 수 있다. 이 경우, 상기 보행 궤적은 계단을 오르는 오르막모드, 계단을 내리는 내리막모드, 평지를 걷는 평지모드, 오르막, 내리막, 평지를 혼합하는 혼합모드 등 다양한 모드에 따라 달라질 수 있다. 상기 보행부(3)는 3개이상의 회전축을 갖도록 구현됨으로써, 3자유도 이상의 다양한 보행 궤적을 갖도록 회전할 수도 있다. 이에 따라, 보행 훈련자는 양발이 각각 움직이거나 동시에 움직이는 등 다양한 상황에 맞는 근육을 강화시킬 수 있다. 상기 보행부(3)는 모터, 실린더, 및 벨트로 구성되는 보행구동부(미도시)에 의해 회전될 수 있다.The
상기 상체지지부(4)는 상기 보행부(3)가 지지하는 하중이 분산되도록 하기 위한 것이다. 상기 상체지지부(4)는 상기 보행부(3)와 이격된 위치에 위치하도록 상기 본체(2)에 결합될 수 있다. 예컨대, 상기 상체지지부(4)는 X축 방향(도 1에 도시됨)을 기준으로 상기 본체(2)에서 앞쪽에 위치하도록 상기 본체(2)에 결합될 수 있다. 이에 따라, 상기 상체지지부(4)는 상기 보행부(3)의 회전에 간섭되지 않을 수 있다. 상기 상체지지부(4)는 Z축 방향(도 1에 도시됨)으로 긴 막대형태로 형성될 수 있다. 상기 상체지지부(4)는 보행 훈련자의 가슴을 지지하기 위한 가슴지지기구, 상기 가슴지지기구에 결합되어 상기 보행 훈련자의 상체를 고정시키기 위한 벨트기구, 및 보행 훈련자가 손으로 잡을 수 있는 손잡이기구를 포함할 수 있다. 또한, 상기 상체지지부(4)는 보행 훈련자의 골반을 지지하는 안장기구(41)를 더 포함할 수 있다. 이에 따라, 상기 상체지지부(4)는 보행 훈련자의 체중을 일부 지지함으로써, 상기 보행부(3)가 지지하는 하중을 분산시킬 수 있다.The upper
상기 안장기구(41)는 상기 보행부(3)에 탑승한 보행 훈련자가 앉을 수 있도록 골반을 지지하기 위한 것이다. 상기 안장기구(41)는 상기 상체지지부(4)에서 X축 방향을 기준으로 경사판 쪽을 향해 돌출되게 형성될 수 있다. 이에 따라, 상기 보행 훈련자는 안장기구(41)에 앉아서 양발을 구를 수 있다. 이 경우, 상기 보행부(3)는 상기 안장기구(41)의 아래쪽에 위치될 수 있다. 상기 안장기구(41)는 자전거의 안장형태로 형성될 수 있으나, 보행 훈련자의 골반을 지지할 수 있으면 다른 형태로 형성될 수도 있다. 상기 안장기구(41)는 보행 훈련자의 보행 능력이 향상되어 보행 훈련자가 서서 보행 훈련을 수행할 경우, 상기 보행 훈련자를 지지하지 않을 수도 있다. 이에 따라, 본 발명에 따른 보행 훈련 장치(1)는 보행 훈련자가 상기 안장기구(41)에 앉는 것으로 보행 훈련을 수행할 수 있고 상기 안장기구(41)로부터 일어나는 것으로 보행 훈련을 중지할 수 있으므로, 상기 안장기구(41)에 용이하게 착석하거나 탈석함으로써 보행 훈련을 용이하게 수행하거나 중지할 수 있다.The
상기 촬영부(5)는 보행 훈련을 수행하는 보행 훈련자의 보행 훈련 영상 획득, 및 보행 훈련자의 골반, 무릎, 발목의 각도를 측정하기 위한 것이다. 상기 촬영부(5)는 상기 보행부(3)에 탑승한 보행 훈련자를 촬영하도록 설치된다. 예컨대, 상기 촬영부(5)는 촬영영역이 보행 훈련자를 향하도록 설치됨으로써, 보행 훈련자를 촬영할 수 있다. 예컨대, 도 1을 참고하면 상기 촬영부(5)는 Z축을 기준으로 상측에서 하측을 향하는 방향으로 상기 보행 훈련자를 촬영할 수 있다. 예컨대, 도 6을 참고하면 상기 촬영부(5)는 Z축을 기준으로 하측에서 상측을 향하는 방향으로 상기 보행 훈련자를 촬영할 수도 있다. 상기 촬영부(5)는 후술할 지지부(8)에 의해 상기 본체(8)에 결합될 수 있다. 이에 따라, 상기 촬영부(5)는 상기 보행부(3)에 탑승하여 보행 훈련을 수행하는 보행 훈련자의 보행 훈련 영상을 획득할 수 있다. 상기 촬영부(5)는 다양한 각도에서 보행 훈련자를 촬영하기 위해 상기 본체(2)에 N(N은 1보다 큰 정수)개가 설치될 수 있다. 예컨대, 상기 촬영부(5)는 2개이상 설치될 수 있다. 이 경우, 상기 촬영부(5)들은 상기 본체(2)에 서로 이격되게 설치되고 보행 훈련자를 향해 설치될 수 있다. 예컨대, 도 1을 참고하면, 상기 촬영부(5)가 3개 설치될 경우 3개의 촬영부(5)는 보행 훈련자를 중심으로 동일한 거리로 이격되게 설치될 수 있다. 이 경우, 상기 3개의 촬영부(5)는 보행 훈련자를 중심으로 120도 간격으로 서로 이격되게 상기 본체(2)에 설치될 수 있다. 도 6을 참고하면, 상기 촬영부(5)가 4개 설치될 경우 4개의 촬영부(5)는 보행 훈련자를 중심으로 동일한 거리로 이격되게 설치되고, 보행 훈련자를 중심으로 90도 간격으로 서로 이격되게 상기 본체(2)에 설치될 수 있다. 이 경우, 상기 촬영부(5)들은 모두 보행 훈련자의 보행 훈련 영상 획득, 및 각도측정을 위해 보행 훈련자를 향해 설치될 수 있다. 상기 촬영부(5)는 알지비디(RGB-D) 카메라일 수 있다. 상기 촬영부(5)는 영상촬영기구(51), 및 거리측정기구(52)를 포함할 수 있다.The photographing
상기 영상촬영기구(51)는 보행 훈련자의 보행 훈련 영상을 촬영하기 위한 것이다. 상기 영상촬영기구(51)는 상기 지지부(8)에 의해 고정되게 설치됨으로써, 고정된 촬영영역에서 보행 훈련자가 보행 훈련하는 영상을 촬영할 수 있다. 상기 영상촬영기구(51)는 상기 지지부(8)에 회전 가능하게 설치됨으로써, 보행 훈련자의 신장, 체격, 체중에 따라 촬영영역을 변경할 수 있다. 이 경우, 상기 영상촬영기구(51)는 작업자에 의해 회전되거나 모터 등 구동장치에 의해 회전될 수 있다. 이에 따라, 상기 영상촬영기구(51)는 보행 훈련자의 보행 훈련 영상을 촬영할 수 있다. 상기 영상촬영기구(51)가 회전하면, 상기 거리측정기구(52)도 함께 회전할 수 있다. 도시되지 않았지만, 상기 영상촬영기구(51)는 촬영한 영상을 표시하는 디스플레이장치(미도시)에 유선통신 및 무선통신 중 적어도 하나의 방법으로 연결될 수 있다. 이에 따라, 상기 영상촬영기구(51)는 촬영한 보행 훈련 영상을 상기 디스플레이장치로 전송할 수 있다. 상기 보행 훈련자는 상기 디스플레이장치를 통해 표시되는 자신의 보행 훈련 영상을 보면서 보행 자세 등을 실시간으로 수정할 수 있다. 또한, 보행 훈련자는 복수개의 영상촬영기구(51)로부터 전송되는 다양한 영상을 볼 수 있다. 예컨대, 보행 훈련자는 보행 훈련하는 자신의 정면영상, 측면영상, 후면영상, 대각영상 중 적어도 하나의 영상을 상기 디스플레이장치를 통해 볼 수 있다. 이에 따라, 본 발명에 따른 보행 훈련 장치(1)는 보행 훈련자가 다양한 각도에서 실시간으로 보행 훈련 자세를 볼 수 있도록 함으로써, 보행 자세를 바른 보행 자세로 수정하도록 하여 보행 훈련자의 보행 능력 회복 기간을 단축시킬 수 있다. 상기 영상촬영기구(51)는 영상을 저장할 수 있는 저장장치(미도시)에 유선통신 및 무선통신 중 적어도 하나의 방법으로 연결됨으로써, 상기 저장장치에 보행 훈련 영상을 제공할 수 있다. 이에 따라, 상기 저장장치는 보행 훈련자의 보행 훈련 영상을 저장할 수 있다.The
상기 거리측정기구(52)는 보행 훈련자의 골반, 대퇴부, 종아리, 발까지의 이격된 이격거리를 각각 측정하기 위한 것이다. 상기 거리측정기구(52)는 상기 영상촬영기구(51)와 함께 상기 지지부(8)에 결합될 수 있다. 이 경우, 상기 거리측정기구(52)는 상기 영상촬영기구(51)로부터 이격된 위치에 위치될 수 있다. 보행 훈련자가 상기 보행부(3)에 탑승하여 보행 훈련을 수행하면, 상기 보행 훈련자의 골반, 대퇴부, 종아리, 발은 계속하여 위치가 변할 수 있다. 상기 거리측정기구(52)는 기설정된 기준시간간격에 따라 보행 훈련자의 골반, 대퇴부, 종아리, 발까지의 이격된 이격거리를 측정할 수 있다. 상기 기준시간간격은 보행 훈련자가 보행 훈련하는 단위 시간을 의미하며, 작업자에 의해 미리 설정될 수 있다. 예컨대, 상기 기준시간간격은 1초일 수 있다. 상기 거리측정기구(52)는 1초마다 위치가 변하는 보행 훈련자의 골반, 대퇴부, 종아리, 발의 이격된 이격거리를 측정할 수 있다. 상기 1초 사이에는 5프레임, 10프레임, 30프레임의 정지영상이 포함될 수 있다. 상기 거리측정기구(52)의 성능이 좋을수록 1초당 프레임의 개수는 증가될 수 있다. 상기 거리측정기구(52)는 1초마다 측정한 보행 훈련자의 골반, 대퇴부, 종아리, 발 각각의 이격된 이격거리를 후술할 연산부(6)에 제공할 수 있다. 상기 거리측정기구(52)는 유선통신 및 무선통신 중 적어도 하나의 방법으로 상기 연산부(6)에 연결됨으로써, 측정한 이격거리값을 상기 연산부(6)에 제공할 수 있다.The
본 발명에 따른 보행 훈련 장치(1)는 연산부(6) 및 제어부(7)를 포함할 수 있다.The walking
상기 연산부(6)는 보행 훈련자의 골반, 무릎, 발목의 각도를 산출하기 위한 것이다. 상기 연산부(6)는 상기 거리측정기구(52)로부터 보행 훈련자의 골반, 대퇴부, 종아리, 발에 대한 각각의 이격거리값을 실시간으로 제공받고, 작업자에 의해 미리 입력된 알고리즘을 통해 보행 훈련자의 골반, 무릎, 발목의 각도를 각각 산출할 수 있다. 상기 연산부(6)는 유선통신 및 무선통신 중 적어도 하나의 방법으로 상기 제어부(7)에 연결될 수 있다. 이에 따라, 상기 연산부(6)는 보행 훈련자의 골반, 무릎, 발목 각각에 대한 산출각도값을 상기 제어부(7)에 제공할 수 있다.The
상기 제어부(7)는 상기 연산부(6)가 산출한 산출각도값을 기설정된 기준관절각도값과 비교하기 위한 것이다. 상기 기준관절각도값은 보행 훈련자와 신장, 체격, 몸무게 등이 유사한 정상인의 골반, 무릎, 발목의 각도를 측정한 값을 의미하며, 작업자에 의해 미리 측정되어 상기 제어부(7)에 저장될 수 있다. 이 경우, 상기 제어부(7)에 저장되는 기준관절각도값은 정상인의 신장, 체격, 몸무게 등 다양한 요소의 변화에 따른 다양한 관절각도값을 포함할 수 있다. 상기 제어부(7)는 유선통신 및 무선통신 중 적어도 하나의 방법으로 상기 디스플레이장치에 연결될 수 있다. 이에 따라, 상기 제어부(7)는 상기 연산부(6)로부터 산출각도값을 제공받아 기설정된 기준관절각도값과 비교하여, 오차값을 상기 디스플레이장치에 제공할 수 있다. 상기 디스플레이장치는 보행 훈련자가 실시간으로 상기 오차값을 볼 수 있도록 표시할 수 있다. 상기 오차값이 작을수록 보행 훈련자는 정상인의 보행과 가까워지는 것으로 판단될 수 있다. 이 경우, 본 발명에 따른 보행 훈련 장치(1)는 상기 보행부(3)의 회전 속도를 증가시키는 등 보행 훈련의 강도를 더 높일 수 있다. 상기 오차값이 클수록 보행 훈련자는 정상인의 보행과 멀어지는 것으로 판단될 수 있다. 이 경우, 본 발명에 따른 보행 훈련 장치(1)는 상기 보행부(3)의 회전 속도를 감소시키는 등 보행 훈련의 강도를 더 낮출 수 있다. 따라서, 본 발명에 따른 보행 훈련 장치(1)는 보행 훈련자가 보행 훈련 시 실시간으로 자신의 보행 훈련 성과를 알 수 있으므로, 보행 훈련에 대한 만족도를 높일 수 있을 뿐만 아니라 무리하게 보행 훈련하는 것을 방지함으로써 낙상과 같은 안전사고가 발생하는 것을 방지할 수 있다.The
도시되지 않았지만, 상기 연산부(6) 및 상기 제어부(7)는 상기 저장장치에 연결되게 설치됨으로써, 상기 저장장치에 보행 훈련자에 대한 보행 훈련 데이터를 제공할 수 있다. 이에 따라, 상기 저장장치는 보행 훈련자에 대한 보행 훈련 영상, 및 보행 훈련 데이터를 저장할 수 있다. 상기 저장장치에 저장된 보행 훈련 영상, 및 보행 훈련 데이터는 보행 훈련자에 대한 재활의 정도를 분석하는데 사용될 수 있다.Although not shown, the
본 발명에 따른 보행 훈련 장치(1)는 지지부(8)를 포함할 수 있다.The walking
상기 지지부(8)는 상기 촬영부(3)를 지지하기 위한 것이다. 상기 지지부(8)는 일측이 상기 본체(2)에 결합되고, 타측이 상기 촬영부(3)에 결합될 수 있다. 이에 따라, 상기 지지부(8)는 상기 본체(2)에 지지되어 상기 촬영부(3)를 지지할 수 있다. 상기 지지부(8)는 어퍼프레임(81) 및 암프레임(82)을 포함할 수 있다.The
상기 어퍼프레임(81)은 상기 본체(2)에 회전 가능하게 결합될 수 있다. 상기 어퍼프레임(81)은 Z축과 평행한 방향으로 위치하도록 상기 본체(2)에 결합될 수 있다. 상기 어퍼프레임(81)은 Z축과 평행한 회전축을 중심으로 회전할 수 있다. 이에 따라, 상기 촬영부(3)가 촬영하는 방향이 변경될 수 있다. 상기 어퍼프레임(81)은 제1지지부재(811) 및 제2지지부재(812)를 포함할 수 있다.The
상기 제1지지부재(811)는 일측이 상기 본체(2)에 회전 가능하게 결합될 수 있다. 상기 제1지지부재(811)의 타측에는 상기 제2지지부재(812)가 결합될 수 있다. 이 경우, 상기 제2지지부재(812)는 상기 제1지지부재(811)에 삽입되게 결합될 수 있다. 상기 제1지지부재(811)는 내부가 비어 있는 사각기둥 형태로 형성될 수 있으나, 이에 한정되지 않으며 상기 제2지지부재(812)가 삽입 가능하게 결합될 수 있으면 원기둥 등 다른 형태로 형성될 수도 있다. 상기 제1지지부재(811)는 금속재질로 형성될 수 있으나, 경량화를 위해 플라스틱 재질로 형성될 수도 있다.One side of the
상기 제2지지부재(812)는 일측이 상기 제1지지부재(811)에 삽입되게 결합될 수 있다. 상기 제2지지부재(812)의 타측에는 상기 암프레임(82)이 회전 가능하게 결합될 수 있다. 상기 제2지지부재(812)는 상기 제1지지부재(811)에 삽입되어 상기 제1지지부재(811)와 중첩되는 중첩길이가 증가되거나 짧아질 수 있다. 상기 제2지지부재(812)는 작업자에 의해 상기 제1지지부재(811)와 중첩되는 중첩길이가 변경될 수 있으나, 모터와 같은 구동장치를 통해 중첩길이가 변경될 수도 있다. 상기 중첩길이가 증가되면, 상기 어퍼프레임(81)의 길이가 감소될 수 있다. 이에 따라, 상기 보행 훈련자를 촬영하는 촬영부(5)의 높이가 낮아질 수 있다. 이 경우, 상기 촬영부(5)는 도 6에 도시된 것처럼 하측에서 상측을 향하는 방향으로 보행 훈련자를 촬영할 수 있다. 상기 중첩길이가 감소되면, 상기 어퍼프레임(81)의 길이가 증가될 수 있다. 이에 따라, 상기 보행 훈련자를 촬영하는 촬영부(5)의 높이가 높아질 수 있다. 이 경우, 상기 촬영부(5)는 도 1에 도시된 것처럼 상측에서 하측을 향하는 방향으로 보행 훈련자를 촬영할 수 있다. 상기 제2지지부재(812)는 금속재질로 형성될 수 있으나, 경량화를 위해 플라스틱 재질로 형성될 수도 있다.One side of the
상기 암프레임(82)은 상기 제2지지부재(812)에 회전 가능하게 결합될 수 있다. 상기 암프레임(82)은 X축 방향으로 돌출되도록 상기 제2지지부재(812)에 결합될 수 있다. 상기 암프레임(82)은 일측이 상기 제2지지부재(812)에 결합되고, 타측에는 상기 촬영부(5)가 회전 가능하게 결합될 수 있다. 상기 암프레임(82)은 Y축과 평행한 회전축을 중심으로 회전할 수 있다. 이에 따라, 상기 촬영부(3)가 촬영하는 방향이 변경될 수 있다. 예컨대, 상기 촬영부(3)는 상기 암프레임(82)이 시계방향으로 회전하면 상측에서 하측을 향하는 방향으로 촬영영역이 변경될 수 있다. 예컨대, 상기 촬영부(3)는 상기 암프레임(82)이 반시계방향으로 회전하면 하측에서 상측을 향하는 방향으로 촬영영역이 변경될 수 있다. 상기 암프레임(82)에는 상기 촬영부(3)가 회전 가능하게 결합될 수 있다. 도 5를 참고하면, 상기 촬영부(3)는 시계방향 또는 반시계방향으로 회전할 수 있다. 상기 촬영부(3)가 상기 암프레임(82)에 대해 시계방향으로 회전하면, 상기 촬영부(3)는 상기 지지부(8)를 기준으로 우측영역을 촬영할 수 있다. 상기 촬영부(3)가 상기 암프레임(82)에 대해 반시계방향으로 회전하면, 상기 촬영부(3)는 상기 지지부(8)를 기준으로 좌측영역을 촬영할 수 있다. 이에 따라, 본 발명에 따른 보행 훈련 장치(1)는 상기 어퍼프레임(81), 상기 암프레임(82), 및 상기 촬영부(5) 중 적어도 하나의 방향을 조절함으로써, 다양한 신장, 체격을 갖는 보행 훈련자에 대한 보행 훈련 영상 및 골반, 무릎, 발목의 각도를 측정할 수 있다. 따라서, 본 발명에 따른 보행 훈련 장치(1)는 보행 훈련자가 바뀔 때마다 상기 보행 훈련자의 신장, 체격에 따라 상기 어퍼프레임(81) 및 상기 암프레임(82)을 새로 설치할 필요가 없으므로, 보행 훈련자의 보행 훈련 시간을 앞당길 수 있을 뿐만 아니라 다양한 길이를 갖는 상기 어퍼프레임(81) 및 상기 암프레임(82)을 구비할 필요가 없으므로 보행 훈련에 대한 설치비용도 절감할 수 있다.The
이상에서 설명한 본 발명은 전술한 실시예 및 첨부된 도면에 한정되는 것이 아니고, 본 발명의 기술적 사상을 벗어나지 않는 범위 내에서 여러 가지 치환, 변형 및 변경이 가능하다는 것이 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자에게 있어 명백할 것이다.The present invention described above is not limited to the above-described embodiment and the accompanying drawings, and it is common in the art that various substitutions, modifications, and changes can be made without departing from the technical spirit of the present invention. It will be evident to those who have knowledge of.
Claims (6)
Translated fromKoreanApplications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2016-0174790 | 2016-12-20 | ||
| KR1020160174790AKR20180071778A (en) | 2016-12-20 | 2016-12-20 | Apparatus for Training Walk |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018117593A1true WO2018117593A1 (en) | 2018-06-28 |
Family
ID=62626639
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/KR2017/015017CeasedWO2018117593A1 (en) | 2016-12-20 | 2017-12-19 | Gait training apparatus |
Country Status (2)
| Country | Link |
|---|---|
| KR (1) | KR20180071778A (en) |
| WO (1) | WO2018117593A1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI708628B (en)* | 2019-12-26 | 2020-11-01 | 財團法人工業技術研究院 | Sensing and feedback system for detecting motions of riding a spinning bike and method thereof |
| US20220392370A1 (en)* | 2019-11-19 | 2022-12-08 | National Rehabilitation Center | Virtual reality-based ground gait training system and method |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20060001820A (en)* | 2005-03-24 | 2006-01-06 | 경북대학교 산학협력단 | Leg Rehabilitation Training Device and Leg Rehabilitation Training Method Using Weight Load and Joint Angle as Variables |
| KR20060106907A (en)* | 2006-05-29 | 2006-10-12 | 경북대학교 산학협력단 | Gait training device using motion analysis |
| JP2015104397A (en)* | 2013-11-28 | 2015-06-08 | 国立大学法人 筑波大学 | Walking training apparatus and walking training system |
| KR20150078399A (en)* | 2013-12-30 | 2015-07-08 | 현대중공업 주식회사 | Seating-Type Supporting Unit And Seating-Type Apparatus For Training Walk Using The Same |
| KR20160063491A (en)* | 2014-11-26 | 2016-06-07 | 현대중공업 주식회사 | Apparatus for Supporting Walking Trainee and Apparatus for Training Walk Comprising the same |
- 2016
- 2016-12-20KRKR1020160174790Apatent/KR20180071778A/ennot_activeCeased
- 2017
- 2017-12-19WOPCT/KR2017/015017patent/WO2018117593A1/ennot_activeCeased
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20060001820A (en)* | 2005-03-24 | 2006-01-06 | 경북대학교 산학협력단 | Leg Rehabilitation Training Device and Leg Rehabilitation Training Method Using Weight Load and Joint Angle as Variables |
| KR20060106907A (en)* | 2006-05-29 | 2006-10-12 | 경북대학교 산학협력단 | Gait training device using motion analysis |
| JP2015104397A (en)* | 2013-11-28 | 2015-06-08 | 国立大学法人 筑波大学 | Walking training apparatus and walking training system |
| KR20150078399A (en)* | 2013-12-30 | 2015-07-08 | 현대중공업 주식회사 | Seating-Type Supporting Unit And Seating-Type Apparatus For Training Walk Using The Same |
| KR20160063491A (en)* | 2014-11-26 | 2016-06-07 | 현대중공업 주식회사 | Apparatus for Supporting Walking Trainee and Apparatus for Training Walk Comprising the same |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20220392370A1 (en)* | 2019-11-19 | 2022-12-08 | National Rehabilitation Center | Virtual reality-based ground gait training system and method |
| US12437670B2 (en)* | 2019-11-19 | 2025-10-07 | National Rehabilitation Center | Virtual reality-based ground gait training system and method |
| TWI708628B (en)* | 2019-12-26 | 2020-11-01 | 財團法人工業技術研究院 | Sensing and feedback system for detecting motions of riding a spinning bike and method thereof |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20180071778A (en) | 2018-06-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10376734B1 (en) | Gait training exercise and analysis systems for body support systems with adjustable user body weight force | |
| US9895282B2 (en) | Exercise and gait-training apparatus | |
| WO2013119001A1 (en) | Walking training apparatus | |
| US8562548B2 (en) | Rehabilitation device and controlling method thereof | |
| El-Meniawy et al. | Role of treadmill training versus suspension therapy on balance in children with Down syndrome | |
| Pennycott et al. | Effects of added inertia and body weight support on lateral balance control during walking | |
| Winchester et al. | Robotic orthoses for body weight–supported treadmill training | |
| WO2010082719A1 (en) | Rehabilitation training apparatus for legs | |
| Arnet et al. | Force application during handcycling and handrim wheelchair propulsion: an initial comparison | |
| Balasubramanian et al. | Foot placement in a body reference frame during walking and its relationship to hemiparetic walking performance | |
| Chun et al. | Effects of 3-dimensional lumbar stabilization training for balance in chronic hemiplegic stroke patients: a randomized controlled trial | |
| Ko et al. | New wearable exoskeleton for gait rehabilitation assistance integrated with mobility system | |
| KR20230155641A (en) | Walking Rehabilitation Training Apparatus | |
| WO2018117593A1 (en) | Gait training apparatus | |
| Haufe et al. | Increasing exercise intensity during outside walking training with a wearable robot | |
| KR102296449B1 (en) | Apparatus for Supporting Walking Trainee and Apparatus for Training Walk Comprising the same | |
| KR101778086B1 (en) | the walking rehabilitation apparatus for severe disability | |
| Pohl et al. | Limb movement, coordination and muscle activity during a cross-coordination movement on a stable and unstable surface | |
| WO2014065448A1 (en) | Correcting walker | |
| Harburn et al. | An overhead harness and trolly system for balance and ambulation assessment and training | |
| Moriello et al. | Yoga therapy in an individual with spinal cord injury: A case report | |
| Carpinella et al. | Counteracting postural perturbations through body weight shift: a pilot study using a robotic platform in subjects with Parkinson’s disease | |
| Kaneda | The features of muscle activity during chair standing and sitting motion in submerged condition | |
| Lim et al. | Effects of mechanical horseback riding velocity on spinal alignment in young adults | |
| Hirano et al. | Preliminary gait analysis of frail versus older adults |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application | Ref document number:17882907 Country of ref document:EP Kind code of ref document:A1 | |
| NENP | Non-entry into the national phase | Ref country code:DE | |
| 122 | Ep: pct application non-entry in european phase | Ref document number:17882907 Country of ref document:EP Kind code of ref document:A1 |