WO2017168754A1 - Automatic parking system, automatic parking control device, and automatic parking control method - Google Patents
Automatic parking system, automatic parking control device, and automatic parking control methodDownload PDFInfo
- Publication number
- WO2017168754A1 WO2017168754A1PCT/JP2016/060939JP2016060939WWO2017168754A1WO 2017168754 A1WO2017168754 A1WO 2017168754A1JP 2016060939 WJP2016060939 WJP 2016060939WWO 2017168754 A1WO2017168754 A1WO 2017168754A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- automatic parking
- parking
- automatic
- vehicle
- control device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images












Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/027—Parking aids, e.g. instruction means
- B62D15/0285—Parking performed automatically
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/06—Automatic manoeuvring for parking
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/14—Traffic control systems for road vehicles indicating individual free spaces in parking areas
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
Definitions
- the present inventionrelates to an automatic parking system.
- Patent Documents 1 to 3 listed belowpropose a system in which a vehicle that performs automatic parking and a user's mobile terminal perform a coordinated operation.
- valet parking by unmanned drivingwill be possible.
- Valley parkingmeans that after the driver gets off the vehicle, the vehicle is automatically driven to park in the parking lot, and further, when the driver gets on, the vehicle is automatically driven to the boarding point.
- the valet parking system currently under developmentis realized by communication between the infrastructure equipment in the parking lot and the automatic driving device of the vehicle. For example, troubles such as two vehicles trying to park in the same parking area Does not occur. However, such a trouble may occur if valet parking is realized by autonomous automatic traveling using a vehicle-mounted sensor.
- This inventionwas made in order to solve the above subjects, and it aims at providing the automatic parking system which can perform the automatic parking smoothly by autonomous automatic driving
- An automatic parking systemincludes an automatic parking control device that controls automatic parking of a vehicle having an automatic driving function, and a portable terminal that can communicate with the automatic parking control device. Searching for an empty parking area and transmitting the search result to the mobile terminal. Upon receiving the search result of the empty parking area from the automatic parking control device, the mobile terminal issues an instruction regarding the selection of the parking area based on the user's operation. It transmits to an automatic parking control apparatus, and an automatic parking control apparatus selects a target parking area from the detected empty parking areas based on the instruction
- the usersince the user can confirm the search result of the empty parking area using the portable terminal even after getting off the vehicle, and can give an instruction regarding the selection of the parking area, the automatic parking is smoothly performed. It can be carried out.
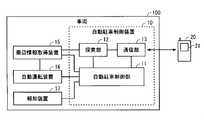
- FIG. 1is a diagram showing a configuration of an automatic parking system according to an embodiment of the present invention.
- the systemincludes an automatic parking control device 10 mounted on a vehicle 100 having an automatic driving function and a mobile terminal 20 capable of communicating with the automatic parking control device 10.
- the mobile terminal 20may be a general-purpose communication device such as a mobile phone or a smartphone, or may be a key of the vehicle 100 having a communication function.
- the portable terminal 20includes a display unit that displays an image and an operation input unit that receives a user operation.
- the display unit and the operation input unit of the mobile terminal 20are realized as one touch panel 21.
- the vehicle 100includes a peripheral information acquisition device 15 that acquires information around the vehicle 100 (hereinafter referred to as “peripheral information”), an automatic driving device 16 that performs automatic driving of the vehicle 100, and pedestrians and other vehicles around the vehicle 100. And a notification device 17 for performing various notifications.
- peripheral information acquisition device 15that acquires information around the vehicle 100 (hereinafter referred to as “peripheral information”)
- an automatic driving device 16that performs automatic driving of the vehicle 100
- pedestrians and other vehicles around the vehicle 100pedestrians and other vehicles around the vehicle 100.
- a notification device 17for performing various notifications.
- the peripheral information acquisition device 15includes, for example, an ultrasonic sensor (also referred to as “sonar”), a camera, a millimeter wave radar, a laser radar, and the like.
- the peripheral information acquisition device 15uses, as the peripheral information, positions of obstacles (for example, pedestrians, other vehicles, features, etc.) existing around the vehicle 100, positions such as road center lines and parking lot lane markings. Information can be acquired.
- the automatic driving device 16performs autonomous automatic driving of the vehicle 100 by controlling the engine, motor, gear, steering, brake, and the like of the vehicle 100 based on the peripheral information acquired by the peripheral information acquisition device 15.
- the notification device 17includes, for example, a sound output device such as a speaker, a horn, and a buzzer, a display device that displays characters and images, and a light emitting device such as a headlight and a blinker.
- the notification device 17may use a device mounted on a general vehicle 100 or may be a device dedicated to automatic parking.
- the automatic parking control device 10includes an automatic parking control unit 11, a search unit 12, and a communication unit 13.
- the automatic parking control unit 11controls the automatic driving device 16 to automatically park the vehicle 100.
- the peripheral information acquired by the peripheral information acquisition device 15is also used for automatic parking processing.
- the search unit 12searches for an empty parking section existing around the vehicle 100 based on the peripheral information acquired by the peripheral information acquisition device 15 prior to automatic parking of the vehicle 100.
- the “vacant parking section”refers to a parking section that can be parked from the current position of the vehicle 100 without touching surrounding obstacles.
- the communication unit 13performs wireless communication with the mobile terminal 20 owned by the user. Specifically, the communication unit 13 transmits the search result of the empty parking area by the search unit 12 to the mobile terminal 20 and receives a user instruction regarding the selection of the parking area from the mobile terminal 20.
- a user of the mobile terminal 20is typically a driver of the vehicle 100.
- the automatic parking control unit 11parks the vehicle 100 from among the empty parking spaces detected by the search unit 12 based on the instruction (“ Define the target parking area). Then, the automatic parking control unit 11 controls the automatic driving device 16 so that the vehicle 100 is automatically parked in the target parking section.
- the user's instruction regarding the selection of the target parking areais not limited to the selection result of the target parking area by the user, but may be an instruction to leave the selection of the target parking area to the automatic parking control device 10. That is, the user can omit the operation of selecting the target parking area.
- the automatic parking control unit 11interrupts the automatic parking process when an empty parking area is not found or when the automatic parking cannot be continued due to an obstacle such as another vehicle during the automatic parking. .
- the automatic parking control unit 11notifies the mobile terminal 20 of the interruption of the process through the communication unit 13 and asks the user for an instruction for the subsequent response.
- the usercan use the mobile terminal 20 to instruct the automatic parking control device 10 to, for example, re-search for an empty parking section or stop automatic parking.
- FIG. 2 and 3are diagrams showing an example of the hardware configuration of the automatic parking control device 10, respectively.
- Each element (the automatic parking control part 11, the search part 12, and the communication part 13) of the automatic parking control apparatus 10 shown in FIG. 1is implement
- the automatic parking control unit 11Based on the instruction from the communication unit 13 and the portable terminal 20, the automatic parking control unit 11 that selects the target parking area from the detected empty parking areas and automatically parks the vehicle 100 in the target parking area. And comprising.
- Dedicated hardwaremay be applied to the processing circuit 50, or a processor (Central processing unit, central processing unit, processing unit, arithmetic unit, microprocessor, microcomputer, digital, which executes a program stored in the memory Signal Processor) may be applied.
- a processorCentral processing unit, central processing unit, processing unit,
- the processing circuit 50corresponds to, for example, a single circuit, a composite circuit, a programmed processor, a processor programmed in parallel, an ASIC, an FPGA, or a combination thereof. To do.
- Each function of each element of the automatic parking control device 10may be realized by a plurality of processing circuits, or these functions may be realized by a single processing circuit.
- FIG. 3shows a hardware configuration of the automatic parking control apparatus 10 when the processing circuit 50 is configured using a processor.
- the function of each element of the automatic parking control device 10is realized by a combination of software and the like (software, firmware, or software and firmware).
- Software or the likeis described as a program and stored in the memory 52.
- the processor 51 as the processing circuit 50implements the functions of the respective units by reading out and executing the program stored in the memory 52. That is, the automatic parking control device 10, when executed by the processing circuit 50, searches for an empty parking area, transmits a result of searching for an empty parking area to the mobile terminal 20, and parks from the mobile terminal 20.
- the memory 52is a non-volatile memory such as RAM (Random Access Memory), ROM (Read Only Memory), flash memory, EPROM (Erasable Programmable Read Only Memory), EEPROM (Electrically Erasable Programmable Read Only Memory), etc. Or a volatile semiconductor memory, HDD (Hard Disk
- RAMRandom Access Memory
- ROMRead Only Memory
- EPROMErasable Programmable Read Only Memory
- EEPROMElectrically Erasable Programmable Read Only Memory
- HDDHard Disk
- a magnetic diska flexible disk
- the present inventionis not limited to this, and a configuration in which some elements of the automatic parking control device 10 are realized by dedicated hardware and another part of the elements is realized by software or the like.
- the functions of some elementsare realized by the processing circuit 50 as dedicated hardware, and the processing circuit 50 as the processor 51 reads a program stored in the memory 52 for the other some elements.
- the functioncan be realized by executing.
- the automatic parking control device 10can realize the above functions by hardware, software, or the like, or a combination thereof.
- FIG. 4is a flowchart showing the operation of the automatic parking control device 10.
- the process of FIG. 4is referred to as “automatic parking process”.
- 5 to 14are examples of screens displayed on the touch panel 21 of the mobile terminal 20 in association with the automatic parking process of the automatic parking control device 10.
- the operation of the automatic parking system according to the present embodimentwill be described with reference to these drawings.
- the automatic parking process of FIG. 4is disclosed.
- the search unit 12searches for an empty parking area around the vehicle 100 based on the peripheral information acquired by the peripheral information acquisition device 15 (step S1). At this time, the vehicle 100 has not moved from the point where the user got off.
- the communication unit 13transmits the search result to the mobile terminal 20 (step S2).
- the mobile terminal 20When the mobile terminal 20 receives the search result of the empty parking area, the mobile terminal 20 displays a screen as shown in FIG. 5 on the touch panel 21 and the user selects the target parking area or selects the automatic parking process. Confirm with the user if he / she wants to The user can select the automatic parking process by touching the “select” button, and the automatic parking control device 10 automatically selects the parking section by touching the “automatic” button. Can be done.
- An operation mode in which the automatic parking control device 10 automatically selects a parking sectionis defined as an “automatic mode”.
- the screen in FIG. 5is an example when a plurality of empty parking sections are detected. If only one empty parking area is found or if no parking area is found, there is no room for selecting a parking area, and the “select” button cannot be operated as shown in FIGS. Display).
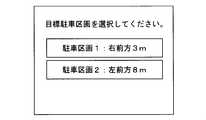
- the mobile terminal 20displays a selection screen for the target parking area as shown in FIG. 8 and presents information on a plurality of empty parking areas to the user. Prompt the user to select a target parking area.
- prioritymay be given to each of the empty parking sections, and information on the empty parking sections may be displayed in descending order of priority. For example, the priority may be set higher for an empty parking section with a shorter distance from the vehicle 100. Further, the priority may be made different depending on whether the empty parking section is on the right side or the left side of the vehicle 100.
- the usercan select an arbitrary empty parking area as the target parking area by touching one of the buttons corresponding to each empty parking area.
- the target parking section selection screenmay be configured using an image taken by the camera of the peripheral information acquisition device 15 as shown in FIG. Further, as shown in FIG. 10, it may be configured using a video that is created based on a video shot by the camera of the peripheral information acquisition device 15 and that appears to be shot from the sky.
- the portable terminal 20transmits to the automatic parking control device 10 an instruction for selecting a target parking area according to the user's selection or an instruction for executing the “automatic mode”.
- the instruction transmitted from the portable terminal 20is received by the communication unit 13 of the automatic parking control device 10.
- the automatic parking control unit 11confirms whether the target parking area has been selected by the user or whether the user has selected “automatic mode” (step S ⁇ b> 3).
- the automatic parking control unit 11controls the automatic driving device 16 to park the vehicle 100 in the target parking area (step). S6).
- the automatic parking control unit 11checks whether or not automatic parking can be continued (hereinafter referred to as “parking impossible state”) while performing automatic parking (step S7). For example, when another vehicle or a pedestrian enters the target parking area and the situation in which the target parking area is no longer an empty parking area continues for a certain time (for example, 30 seconds), the automatic parking control unit 11 does not perform parking. Judged as possible.
- the notification device 17is used to notify that the automatic parking is being performed around the vehicle 100. Specifically, an image or a character indicating that the vehicle is automatically parked is displayed on the display device of the notification device 17, or a warning sound or a voice message indicating that the vehicle is automatically parked is transmitted from the voice output device of the notification device 17. It is conceivable to output the light or to cause the light emitting device to emit light in a predetermined pattern. In this way, it is possible to prevent the vehicle from becoming incapable of parking by alerting other vehicles and pedestrians.
- the automatic parking control unit 11may use a notification device 17 to issue a warning that prompts movement to a dynamic obstacle (for example, another vehicle or a pedestrian) that hinders automatic parking.
- a dynamic obstaclefor example, another vehicle or a pedestrian
- an image or character that prompts movementis displayed on the display device of the notification device 17, a warning sound or voice message that prompts movement is output from the voice output device of the notification device 17, or a predetermined pattern. It is conceivable to cause the light emitting device to emit light.
- the communication unit 13notifies the portable terminal 20 that the parking of the vehicle 100 is completed (step S9).
- the mobile terminal 20displays a screen as shown in FIG. 11, for example, and notifies the user that the vehicle 100 is parked.
- information indicating the parking position of the vehicle 100may be included in the parking completion notification screen.
- Information indicating the parking positionincludes, for example, latitude / longitude information acquired using a GPS (Global Positioning System) receiver of the vehicle 100, a map indicating the parking position, and a parking image captured by the camera of the peripheral information acquisition device 15. A video around the location can be considered.
- GPSGlobal Positioning System
- step S7when it becomes a parking impossible state in the middle of automatic parking (it is YES at step S7), the vehicle 100 is stopped and an automatic parking process is interrupted (step S12).
- an automatic parking processis interrupted (step S12). The process when the automatic parking process is interrupted will be described later.
- step S3the automatic parking control unit 11 confirms whether an empty parking section has been detected in step S1 (step S1). S4). If an empty parking area is detected (YES in step S4), the automatic parking control unit 11 automatically selects a target parking area (step S5). And it transfers to step S6 and parks the vehicle 100 to a target parking area.
- the automatic parking control unit 11may assign a priority to each of the empty parking sections and select the highest priority as the target parking section. For example, the priority may be set higher for an empty parking section with a shorter distance from the vehicle 100. Further, the priority may be made different depending on whether the empty parking section is on the right side or the left side of the vehicle 100.
- step S4when an empty parking area is not detected (NO in step S4), the automatic parking control unit 11 performs empty parking while automatically driving the vehicle 100 in order to find an empty parking area at another place in the parking lot.
- a partition searchis performed (step S10).
- step S11when an empty parking area is found (YES in step S11), it is determined as a target parking area, and the process proceeds to step S6 to automatically park the vehicle 100.
- step S11If an empty parking area is not found even when searching for an empty parking area while automatically driving the vehicle 100 (NO in step S11), the vehicle 100 is stopped and the automatic parking process is temporarily stopped (step S12). ).
- the automatic parking control unit 11uses the notification device 17 to notify that the vehicle 100 is automatically traveling when searching for an empty parking area while the vehicle 100 is automatically traveling. Specifically, an image or a character indicating that the vehicle is automatically traveling is displayed on the display device of the notification device 17, or a warning sound or a voice message indicating that the vehicle is automatically traveling is transmitted from the sound output device of the notification device 17. It is conceivable to output the light or to cause the light emitting device to emit light in a predetermined pattern.
- step S7when parking becomes impossible during automatic parking (YES in step S7), or when an empty parking section is not found (NO in step S11), the automatic parking control unit 11 The automatic parking process is interrupted (step S12). In that case, the communication unit 13 notifies the mobile terminal 20 that the automatic parking process has been interrupted (step S13).
- the mobile terminal 20displays a screen as shown in FIG.
- the mobile terminal 20displays a screen as shown in FIG. 12 and 13 are provided with buttons for instructing the automatic parking control device 10 to perform subsequent processing. Specifically, a “re-search” button for instructing to re-search for an empty parking area while automatically driving the vehicle 100, and re-searching for an empty parking area while waiting for the vehicle 100 on the spot. And a “canceling” button for instructing to cancel the automatic parking process.
- a corresponding instructionis transmitted from the portable terminal 20 to the automatic parking control device 10 and received by the communication unit 13 of the automatic parking control device 10.
- step S14when the user touches “re-search” in FIG. 12 or FIG. 13 (“re-search” in step S14), the automatic parking control unit 11 selects an empty parking area at another location in the parking lot. In order to find out, an empty parking area is searched while the vehicle 100 is running automatically (step S15). Then, similarly to step S2, the communication unit 13 transmits the search result to the portable terminal 20 (step S16), and the process returns to step S3.
- step S14When the user touches the “standby” button in FIG. 12 or FIG. 13 (“standby” in step S14), the automatic parking control unit 11 searches for an empty parking section while the vehicle 100 is stopped on the spot. This is performed (step S17). For example, if there is another empty parking area around the vehicle 100, or if another previously parked car has started and a new empty parking area has been created, a pedestrian who has entered the empty parking area When an empty parking area is detected by the search unit 12 (YES in step S18), the automatic parking control unit 11 determines the empty parking area as a target parking area, and proceeds to step S6. The vehicle 100 is automatically parked. In addition, when a fixed time (for example, 1 minute) passes without an empty parking area being found (YES in step S19), the process returns to step S12 to notify the portable terminal 20 that the automatic parking process has been interrupted again. .
- a fixed timefor example, 1 minute
- the mobile terminal 20displays a screen as shown in FIG. Specify where to move 100. This is because if the automatic parking process is stopped without moving the vehicle 100, the vehicle 100 may obstruct the passage of other vehicles.
- an “automatic parking start point” buttonfor instructing the vehicle 100 to move to a starting point of automatic parking, that is, a point where the user got off, and movement of the vehicle 100 to an empty space around the vehicle 100 are displayed.
- a “peripheral empty space” button for instructing and a “no movement” button for not instructing the vehicle 100 to moveare included.
- the “vacant space”is a place that is not a parking area but does not interfere with other vehicles even if the vehicle is temporarily stopped. The empty space can be detected using the peripheral information acquisition device 15.
- the automatic parking control unit 11causes the vehicle 100 to automatically travel to move to the designated location (step S21). Further, the automatic parking control unit 11 confirms whether or not the vehicle is in a state where the movement cannot be continued (hereinafter referred to as “incapable movement state”) while performing automatic traveling (step S22). The automatic parking control unit 11 determines that the vehicle cannot move when, for example, a situation in which the vehicle cannot move due to another vehicle or a pedestrian continues for a certain time (for example, 30 seconds) or longer. If it becomes a movement impossible state (it is YES at Step S22), it will return to Step S12 and automatic parking control part 11 will interrupt automatic parking processing again.
- the communication unit 13notifies the mobile terminal 20 that the movement of the vehicle 100 is completed (step S24).
- the portable terminal 20displays a screen as shown in FIG. 15, for example, and notifies the user of the completion of movement of the vehicle 100.
- information indicating the stop position of the vehicle 100may be included in the movement completion notification screen.
- information indicating the stop positionfor example, latitude / longitude information acquired using the GPS receiver of the vehicle 100, a map indicating the stop position, a video around the stop position captured by the camera of the peripheral information acquisition device 15, And so on.
- the automatic parking control unit 11stops the automatic parking process without moving the vehicle 100.
- the usersince the vehicle 100 has stopped outside the regular parking area after the automatic parking process is stopped, the user needs to go to the vehicle 100 and move the vehicle 100 by manual driving.
- the usercan check the search result of the empty parking area by the automatic parking control device 10 using the mobile terminal 20 even after getting off the vehicle 100. At the same time, an instruction regarding selection of the target parking area can be given. Moreover, when it becomes a parking impossible state in the middle of automatic parking, or when an empty parking area is not found, the user gives an instruction about the subsequent processing to the automatic parking control device 10 through the mobile terminal 20. Can do. With such a configuration, automatic parking is performed smoothly.
- 10 automatic parking control device11 automatic parking control unit, 12 search unit, 13 communication unit, 15 peripheral information acquisition device, 16 automatic driving device, 17 notification device, 20 mobile terminal, 21 touch panel, 100 vehicle.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Automation & Control Theory (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Abstract
Description
Translated fromJapanese本発明は自動駐車システムに関するものである。The present invention relates to an automatic parking system.
自動運転技術の発達に伴い、無人走行での自動駐車を行うシステムが開発されている。例えば、下記の特許文献1~3では、自動駐車を行う車両とユーザの携帯端末とが連携した動作を行うシステムが提案されている。Along with the development of automatic driving technology, a system for automatic parking with unmanned driving has been developed. For example,
将来的には、無人走行によるバレー駐車(valet parking)が可能になると考えられる。バレー駐車とは、運転者が車両から降りた後、車両を自動走行させて駐車場へ駐車させ、さらに、運転者が乗車するときには車両を乗車地点まで自動走行させることをいう。現在開発が進んでいるバレー駐車システムは、駐車場内のインフラ設備と車両の自動運転装置との通信によって実現されるため、例えば、同じ駐車区画に2台の車両が駐車しようとするようなトラブルは生じない。しかし、車載センサーを用いた自律的な自動走行によってバレー駐車を実現しようとすると、そのようなトラブルが生じる恐れがある。In the future, valet parking by unmanned driving will be possible. Valley parking means that after the driver gets off the vehicle, the vehicle is automatically driven to park in the parking lot, and further, when the driver gets on, the vehicle is automatically driven to the boarding point. The valet parking system currently under development is realized by communication between the infrastructure equipment in the parking lot and the automatic driving device of the vehicle. For example, troubles such as two vehicles trying to park in the same parking area Does not occur. However, such a trouble may occur if valet parking is realized by autonomous automatic traveling using a vehicle-mounted sensor.
本発明は以上のような課題を解決するためになされたものであり、自律的な自動走行による自動駐車を円滑に行うことができる自動駐車システムを提供することを目的とする。This invention was made in order to solve the above subjects, and it aims at providing the automatic parking system which can perform the automatic parking smoothly by autonomous automatic driving | running | working.
本発明に係る自動駐車システムは、自動運転機能を有する車両の自動駐車を制御する自動駐車制御装置と、自動駐車制御装置との通信が可能な携帯端末と、を備え、自動駐車制御装置は、空き駐車区画を探索してその探索結果を携帯端末へ送信し、携帯端末は、自動駐車制御装置から空き駐車区画の探索結果を受信すると、ユーザの操作に基づいて、駐車区画の選択に関する指示を自動駐車制御装置へ送信し、自動駐車制御装置は、携帯端末から受信した指示に基づいて、検出された空き駐車区画のうちから目標駐車区画を選択し、目標駐車区画へ車両を自動駐車させる。An automatic parking system according to the present invention includes an automatic parking control device that controls automatic parking of a vehicle having an automatic driving function, and a portable terminal that can communicate with the automatic parking control device. Searching for an empty parking area and transmitting the search result to the mobile terminal. Upon receiving the search result of the empty parking area from the automatic parking control device, the mobile terminal issues an instruction regarding the selection of the parking area based on the user's operation. It transmits to an automatic parking control apparatus, and an automatic parking control apparatus selects a target parking area from the detected empty parking areas based on the instruction | indication received from the portable terminal, and parks a vehicle to a target parking area automatically.
本発明によれば、ユーザは車両から降りた後も、携帯端末を用いて、空き駐車区画の探索結果を確認できるとともに、駐車区画の選択に関する指示を行うことができるため、自動駐車を円滑に行うことができる。According to the present invention, since the user can confirm the search result of the empty parking area using the portable terminal even after getting off the vehicle, and can give an instruction regarding the selection of the parking area, the automatic parking is smoothly performed. It can be carried out.
本発明の目的、特徴、態様、および利点は、以下の詳細な説明と添付図面とによって、より明白となる。The objects, features, aspects and advantages of the present invention will become more apparent from the following detailed description and the accompanying drawings.
図1は、本発明の実施の形態に係る自動駐車システムの構成を示す図である。当該システムは、自動運転機能を有する車両100に搭載された自動駐車制御装置10と、自動駐車制御装置10との通信が可能な携帯端末20とから構成される。FIG. 1 is a diagram showing a configuration of an automatic parking system according to an embodiment of the present invention. The system includes an automatic
携帯端末20は、例えば、携帯電話やスマートフォンなど汎用の通信機器でもよいし、通信機能を有する車両100のキーでもよい。携帯端末20は、画像を表示する表示部とユーザの操作を受け付ける操作入力部とを備えるものとする。本実施の形態では、携帯端末20の表示部および操作入力部は1つのタッチパネル21として実現されている。The
車両100は、当該車両100の周辺の情報(以下「周辺情報」という)を取得する周辺情報取得装置15と、当該車両100の自動運転を行う自動運転装置16と、周囲の歩行者や他車に対して各種の報知を行う報知装置17とを備えている。The
周辺情報取得装置15は、例えば、超音波センサー(「ソナー」とも呼ばれる)、カメラ、ミリ波レーダ、レーザレーダなどによって構成される。周辺情報取得装置15は、周辺情報として、車両100の周辺に存在する障害物(例えば、歩行者、他車両、地物など)の位置や、道路のセンターラインや駐車場の区画線などの位置の情報を取得することができる。The peripheral
自動運転装置16は、周辺情報取得装置15が取得した周辺情報に基づいて、車両100のエンジンやモーター、ギア、ステアリング、ブレーキ等を制御することで、車両100の自律的な自動運転を行う。報知装置17は、例えば、スピーカやクラクション、ブザーなどの音声出力装置、文字や画像を表示する表示装置、ヘッドライトやウインカーなどの発光装置などによって構成される。報知装置17は、一般的な車両100に搭載されている装置を利用してもよいし、自動駐車専用の装置であってもよい。The
図1のように、自動駐車制御装置10は、自動駐車制御部11、探索部12および通信部13を備えている。自動駐車制御部11は、自動運転装置16を制御して車両100の自動駐車を行う。周辺情報取得装置15が取得する周辺情報は、自動駐車の処理にも用いられる。As shown in FIG. 1, the automatic
探索部12は、車両100の自動駐車に先立って、周辺情報取得装置15が取得した周辺情報に基づき、車両100の周辺に存在する空き駐車区画を探索する。ここで、「空き駐車区画」とは、車両100の現在位置から、周辺の障害物に接触することなく駐車可能な駐車区画のことをいう。The
通信部13は、ユーザが所有する携帯端末20との無線通信を行う。具体的には、通信部13は、探索部12による空き駐車区画の探索結果を携帯端末20へ送信するとともに、携帯端末20から駐車区画の選択に関するユーザの指示を受信する。携帯端末20のユーザは、典型的には車両100の運転者である。The
通信部13が携帯端末20からユーザの指示を受信すると、自動駐車制御部11は、その指示に基づいて、探索部12が検出した空き駐車区画のうちから、車両100を駐車させる駐車区画(「目標駐車区画」と定義する)を選択する。そして、自動駐車制御部11は、車両100を目標駐車区画へ自動駐車させるように、自動運転装置16を制御する。なお、目標駐車区画の選択に関するユーザの指示は、ユーザによる目標駐車区画の選択結果とは限らず、目標駐車区画の選択を自動駐車制御装置10に一任する旨の指示の場合もある。つまり、ユーザは、目標駐車区画を選択する操作を省略することができる。When the
なお、空き駐車区画が見つからない場合や、自動駐車の途中で、他車などの障害物が妨げとなって自動駐車を継続できなくなった場合、自動駐車制御部11は自動駐車の処理を中断する。そのような場合、自動駐車制御部11は、通信部13を通して、処理の中断を携帯端末20に通知して、ユーザにその後の対応についての指示を仰ぐ。ユーザは、携帯端末20を用いて、例えば、空き駐車区画の再探索や、自動駐車の中止などの指示を自動駐車制御装置10に対して行うことができる。Note that the automatic parking control unit 11 interrupts the automatic parking process when an empty parking area is not found or when the automatic parking cannot be continued due to an obstacle such as another vehicle during the automatic parking. . In such a case, the automatic parking control unit 11 notifies the
図2および図3は、それぞれ自動駐車制御装置10のハードウェア構成の一例を示す図である。図1に示した自動駐車制御装置10の各要素(自動駐車制御部11、探索部12および通信部13)は、例えば図2に示す処理回路50により実現される。すなわち、処理回路50は、空き駐車区画を探索する探索部12と、探索部12が空き駐車区画を探索した結果を携帯端末20へ送信するとともに、携帯端末20から駐車区画の選択に関するユーザの指示を受信する通信部13と、携帯端末20からの指示に基づいて、検出された空き駐車区画のうちから目標駐車区画を選択し、当該目標駐車区画へ車両100を自動駐車させる自動駐車制御部11と、を備える。処理回路50には、専用のハードウェアが適用されてもよいし、メモリに格納されるプログラムを実行するプロセッサ(Central Processing Unit、中央処理装置、処理装置、演算装置、マイクロプロセッサ、マイクロコンピュータ、Digital Signal Processor)が適用されてもよい。2 and 3 are diagrams showing an example of the hardware configuration of the automatic
処理回路50が専用のハードウェアである場合、処理回路50は、例えば、単一回路、複合回路、プログラム化したプロセッサ、並列プログラム化したプロセッサ、ASIC、FPGA、またはこれらを組み合わせたものなどが該当する。自動駐車制御装置10の各要素の機能のそれぞれは、複数の処理回路で実現されてもよいし、それらの機能がまとめて一つの処理回路で実現されてもよい。When the
図3は、処理回路50がプロセッサを用いて構成されている場合における自動駐車制御装置10のハードウェア構成を示している。この場合、自動駐車制御装置10の各要素の機能は、ソフトウェア等(ソフトウェア、ファームウェア、またはソフトウェアとファームウェア)との組み合わせにより実現される。ソフトウェア等はプログラムとして記述され、メモリ52に格納される。処理回路50としてのプロセッサ51は、メモリ52に記憶されたプログラムを読み出して実行することにより、各部の機能を実現する。すなわち、自動駐車制御装置10は、処理回路50により実行されるときに、空き駐車区画を探索するステップと、空き駐車区画を探索した結果を携帯端末20へ送信するステップと、携帯端末20から駐車区画の選択に関するユーザの指示を受信するステップと、その指示に基づいて、検出された空き駐車区画のうちから目標駐車区画を選択するステップと、当該目標駐車区画へ車両100を自動駐車させるステップとが、結果的に実行されることになるプログラムを格納するためのメモリ52を備える。換言すれば、このプログラムは、自動駐車制御装置10の各要素の動作の手順や方法をコンピュータに実行させるものであるともいえる。FIG. 3 shows a hardware configuration of the automatic
ここで、メモリ52には、例えば、RAM(Random Access Memory)、ROM(Read Only Memory)、フラッシュメモリー、EPROM(Erasable Programmable Read Only Memory)、EEPROM(Electrically Erasable Programmable Read Only Memory)などの、不揮発性または揮発性の半導体メモリ、HDD(Hard Disk Drive)、磁気ディスク、フレキシブルディスク、光ディスク、コンパクトディスク、ミニディスク、DVD(Digital Versatile Disc)およびそのドライブ装置等が該当する。Here, the
以上、自動駐車制御装置10の各要素の機能が、ハードウェアおよびソフトウェア等のいずれか一方で実現される構成について説明した。しかしこれに限ったものではなく、自動駐車制御装置10の一部の要素を専用のハードウェアで実現し、別の一部の要素をソフトウェア等で実現する構成であってもよい。例えば、一部の要素については専用のハードウェアとしての処理回路50でその機能を実現し、他の一部の要素についてはプロセッサ51としての処理回路50がメモリ52に格納されたプログラムを読み出して実行することによってその機能を実現することが可能である。As described above, the configuration in which the function of each element of the automatic
以上のように、自動駐車制御装置10は、ハードウェア、ソフトウェア等、またはこれらの組み合わせによって、上述の各機能を実現することができる。As described above, the automatic
図4は、自動駐車制御装置10の動作を示すフローチャートである。以下、図4の処理を「自動駐車処理」という。また、図5~図14は、自動駐車制御装置10の自動駐車処理に付随して携帯端末20のタッチパネル21に表示される画面の例である。以下、これらの図を参照しつつ、本実施の形態に係る自動駐車システムの動作を説明する。FIG. 4 is a flowchart showing the operation of the automatic
ユーザが、駐車場で車両100から降り、携帯端末20を操作して自動駐車制御装置10に自動駐車の開始を指示すると、図4の自動駐車処理が開示される。自動駐車処理が開始されると、探索部12は、周辺情報取得装置15が取得した周辺情報に基づいて、車両100の周辺の空き駐車区画を探索する(ステップS1)。このとき、車両100は、ユーザが下車した地点から移動していない。通信部13は、その探索結果を携帯端末20へ送信する(ステップS2)。When the user gets out of the
携帯端末20は、空き駐車区画の探索結果を受信すると、図5のような画面をタッチパネル21に表示して、目標駐車区画をユーザが選択するか、自動駐車処理の選択を自動駐車制御装置10に一任するかを、ユーザに確認する。ユーザは、「選択」ボタンにタッチすることで、自動駐車処理を自分で選択することができ、また、「おまかせ」ボタンにタッチすることで、駐車区画の選択を自動駐車制御装置10に自動的に行わせることができる。駐車区画の選択を自動駐車制御装置10が自動的に行う動作モードを「おまかせモード」と定義する。When the
なお、図5の画面は、空き駐車区画が複数検出された場合の例である。空き駐車区画が1つだけ見つかった場合や、1つも見つからなかった場合には、駐車区画の選択の余地がないため、図6および図7のように「選択」ボタンを操作不可能(または非表示)にするとよい。Note that the screen in FIG. 5 is an example when a plurality of empty parking sections are detected. If only one empty parking area is found or if no parking area is found, there is no room for selecting a parking area, and the “select” button cannot be operated as shown in FIGS. Display).
図5に戻り、ユーザが「選択」ボタンにタッチすると、携帯端末20は、図8のような目標駐車区画の選択画面を表示して、複数の空き駐車区画の情報をユーザに提示すると共に、ユーザに目標駐車区画の選択を促す。図8の画面では、空き駐車区画のそれぞれに優先度を付し、優先度の高い順に空き駐車区画の情報を表示するとよい。例えば、車両100からの距離が短い空き駐車区画ほど優先度を高くするとよい。また、空き駐車区画が車両100の右側にあるか左側にあるかによって、優先度に差をつけてもよい。ユーザは、各空き駐車区画に対応するボタンのいずれかにタッチすることで、任意の空き駐車区画を目標駐車区画として選択することができる。Returning to FIG. 5, when the user touches the “select” button, the
目標駐車区画の選択画面は、図9のように、周辺情報取得装置15のカメラが撮影した映像を用いて構成してもよい。また、図10のように、周辺情報取得装置15のカメラが撮影した映像を基にして作成した、上空から撮影したように見える映像を用いて構成してもよい。The target parking section selection screen may be configured using an image taken by the camera of the peripheral
携帯端末20は、ユーザの選択に応じた目標駐車区画の選択指示、または、「おまかせモード」の実行指示を自動駐車制御装置10へ送信する。携帯端末20から送信された指示は、自動駐車制御装置10の通信部13によって受信される。The
図4へ戻り、自動駐車制御部11は、目標駐車区画がユーザによって選択されたか、ユーザが「おまかせモード」を選択したかを確認する(ステップS3)。ユーザにより目標駐車区画が選択されている場合(ステップS3において「ユーザが選択」)、自動駐車制御部11は、自動運転装置16を制御して、その目標駐車区画へ車両100を駐車させる(ステップS6)。Returning to FIG. 4, the automatic parking control unit 11 confirms whether the target parking area has been selected by the user or whether the user has selected “automatic mode” (step S <b> 3). When the target parking area is selected by the user (“user selects” in step S3), the automatic parking control unit 11 controls the
自動駐車制御部11は、自動駐車を行いながら、自動駐車を継続不可能な状態(以下「駐車不可能状態」という)になったかどうかを確認する(ステップS7)。例えば、目標駐車区画に他車や歩行者が進入するなどして、目標駐車区画が空き駐車区画でなくなった状況が一定時間(例えば30秒)続いた場合に、自動駐車制御部11は駐車不可能状態と判断する。The automatic parking control unit 11 checks whether or not automatic parking can be continued (hereinafter referred to as “parking impossible state”) while performing automatic parking (step S7). For example, when another vehicle or a pedestrian enters the target parking area and the situation in which the target parking area is no longer an empty parking area continues for a certain time (for example, 30 seconds), the automatic parking control unit 11 does not perform parking. Judged as possible.
また、自動駐車制御部11は、車両100の自動駐車を行う際、報知装置17を用いて、車両100の周囲へ自動駐車中である旨を報知する。具体的には、自動駐車中である旨を示す画像や文字を報知装置17の表示装置に表示させたり、自動駐車中である旨を示す警告音や音声メッセージを報知装置17の音声出力装置から出力したり、予め定められたパターンで発光装置を発光させたりすることが考えられる。このように、他車や歩行者に注意を促すことで、駐車不可能状態になることを防ぐことができる。In addition, when the automatic parking control unit 11 performs automatic parking of the
さらに、自動駐車制御部11は、報知装置17を用いて、自動駐車の妨げとなる動的な障害物(例えば他車や歩行者)に対し、移動を促す警告を行ってもよい。具体的には、例えば移動を促す画像や文字を報知装置17の表示装置に表示させたり、移動を促す警告音や音声メッセージを報知装置17の音声出力装置から出力したり、予め定められたパターンで発光装置を発光させたりすることが考えられる。Furthermore, the automatic parking control unit 11 may use a
駐車不可能状態になることなく、車両100の駐車が完了すると(ステップS8でYES)、通信部13は、車両100の駐車が完了した旨を携帯端末20へ通知する(ステップS9)。携帯端末20は、この通知を受けると、例えば図11のような画面を表示して、ユーザに車両100の駐車完了を通知する。図11のように、駐車完了の通知画面には、車両100の駐車位置を示す情報を含ませるとよい。駐車位置を示す情報としては、例えば、車両100のGPS(Global Positioning System)受信機を用いて取得した緯度・経度の情報や、駐車位置を示す地図、周辺情報取得装置15のカメラで撮影した駐車位置周辺の映像、などが考えられる。When the parking of the
なお、自動駐車の途中で、駐車不可能状態になった場合は(ステップS7でYES)、車両100を停車させて、自動駐車処理を中断する(ステップS12)。自動駐車処理を中断したときの処理については後述する。In addition, when it becomes a parking impossible state in the middle of automatic parking (it is YES at step S7), the
一方、ステップS3において、ユーザが「おまかせモード」を選択していた場合(ステップS3において「おまかせ」)、自動駐車制御部11は、ステップS1で空き駐車区画が検出されていたかを確認する(ステップS4)。空き駐車区画が検出されていれば(ステップS4でYES)、自動駐車制御部11は、目標駐車区画の自動選択を行う(ステップS5)。そして、ステップS6へ移行して、目標駐車区画へ車両100を駐車させる。On the other hand, when the user has selected the “automatic mode” in step S3 (“automatic mode” in step S3), the automatic parking control unit 11 confirms whether an empty parking section has been detected in step S1 (step S1). S4). If an empty parking area is detected (YES in step S4), the automatic parking control unit 11 automatically selects a target parking area (step S5). And it transfers to step S6 and parks the
ステップS5の自動選択では、自動駐車制御部11が、空き駐車区画のそれぞれに優先度を付し、優先度の最も高いものを目標駐車区画として選択するとよい。例えば、車両100からの距離が短い空き駐車区画ほど優先度を高くするとよい。また、空き駐車区画が車両100の右側にあるか左側にあるかによって、優先度に差をつけてもよい。In the automatic selection in step S5, the automatic parking control unit 11 may assign a priority to each of the empty parking sections and select the highest priority as the target parking section. For example, the priority may be set higher for an empty parking section with a shorter distance from the
なお、空き駐車区画が検出されていなかった場合(ステップS4でNO)、自動駐車制御部11は、駐車場内の他の場所の空き駐車区画を見つけるために、車両100を自動走行させながら空き駐車区画の探索を行う(ステップS10)。その結果、空き駐車区画が見つかると(ステップS11でYES)、それを目標駐車区画として定め、ステップS6へ移行して、車両100の自動駐車を行う。In addition, when an empty parking area is not detected (NO in step S4), the automatic parking control unit 11 performs empty parking while automatically driving the
車両100を自動走行させながら空き駐車区画の探索を行っても、空き駐車区画が見つからなかった場合は(ステップS11でNO)、車両100を停車させて、自動駐車処理を一旦停止する(ステップS12)。If an empty parking area is not found even when searching for an empty parking area while automatically driving the vehicle 100 (NO in step S11), the
なお、自動駐車制御部11は、空き駐車区画の探索を、車両100を自動走行させながら行う際、報知装置17を用いて車両100の周囲へ自動走行中である旨を報知する。具体的には、自動走行中である旨を示す画像や文字を報知装置17の表示装置に表示させたり、自動走行中である旨を示す警告音や音声メッセージを報知装置17の音声出力装置から出力したり、予め定められたパターンで発光装置を発光させたりすることが考えられる。Note that the automatic parking control unit 11 uses the
上記のように、自動駐車の途中で駐車不可能状態になった場合(ステップS7でYES)、または、空き駐車区画が見つからなかった場合(ステップS11でNO)には、自動駐車制御部11は自動駐車処理を中断させる(ステップS12)。その場合、通信部13は、自動駐車処理を中断した旨を携帯端末20へ通知する(ステップS13)。As described above, when parking becomes impossible during automatic parking (YES in step S7), or when an empty parking section is not found (NO in step S11), the automatic parking control unit 11 The automatic parking process is interrupted (step S12). In that case, the
駐車不可能状態になって自動駐車処理が中断した場合、携帯端末20は、図12のような画面をタッチパネル21に表示させる。また、空き駐車区画が見つからずに自動駐車処理が中断した場合、携帯端末20は、図13のような画面をタッチパネル21に表示させる。図12および図13の画面には、自動駐車制御装置10にその後の処理を指示するためのボタンが設けられている。具体的には、車両100を自動走行させながら空き駐車区画の再探索を行うことを指示する「再探索」のボタンと、車両100をその場で待機させつつ空き駐車区画の再探索を行うことを指示する「待機」ボタンと、自動駐車処理を中止することを指示する「中止」ボタンとが設けられている。ユーザがそのいずれかのボタンにタッチすると、それに対応する指示が携帯端末20から自動駐車制御装置10へ送信され、自動駐車制御装置10の通信部13に受信される。When the automatic parking process is interrupted because the parking is impossible, the
再び図4へ戻り、ユーザが図12または図13の「再探索」にタッチした場合(ステップS14において「再探索」)、自動駐車制御部11は、駐車場内の他の場所の空き駐車区画を見つけるために、車両100を自動走行させながら空き駐車区画の探索を行う(ステップS15)。そして、ステップS2と同様に、通信部13がその探索結果を携帯端末20へ送信し(ステップS16)、ステップS3へ戻る。Returning to FIG. 4 again, when the user touches “re-search” in FIG. 12 or FIG. 13 (“re-search” in step S14), the automatic parking control unit 11 selects an empty parking area at another location in the parking lot. In order to find out, an empty parking area is searched while the
また、ユーザが図12または図13の「待機」ボタンにタッチした場合(ステップS14において「待機」)、自動駐車制御部11は、車両100をその場に停止させたまま空き駐車区画の探索を行う(ステップS17)。例えば、車両100の周辺に他の空き駐車区画が存在した場合や、先に駐車していた他車が発車して新たな空き駐車区画ができた場合、空き駐車区画に進入していた歩行者が立ち去った場合など、探索部12によって空き駐車区画が検出されると(ステップS18でYES)、自動駐車制御部11は、その空き駐車区画を目標駐車区画として定め、ステップS6へ移行して、車両100の自動駐車を行う。なお、空き駐車区画が見つからないまま一定時間(例えば1分)が経過した場合には(ステップS19でYES)、ステップS12へ戻り、再度、自動駐車処理を中断した旨を携帯端末20へ通知する。When the user touches the “standby” button in FIG. 12 or FIG. 13 (“standby” in step S14), the automatic parking control unit 11 searches for an empty parking section while the
一方、ユーザが図12または図13の「中止」ボタンに選択した場合(ステップS14において「中止」)、携帯端末20は、例えば図14のような画面をタッチパネル21に表示して、ユーザに車両100を移動させる場所を指定させる。車両100を移動させずに自動駐車処理を中止すると、車両100が他車の通行の妨げとなる場合があるためである。On the other hand, when the user selects the “CANCEL” button in FIG. 12 or FIG. 13 (“CANCEL” in step S14), the
図14の画面には、車両100に自動駐車の開始地点すなわちユーザが下車した地点への移動を指示するための「自動駐車の開始地点」ボタンと、車両100に周辺の空きスペースへの移動を指示するための「周辺の空きスペース」ボタンと、車両100に移動を指示しない「移動なし」ボタンが含まれている。なお、「空きスペース」とは、駐車区画ではないが、車両を一時的に停めても他車の妨げとならない場所のことである。空きスペースは、周辺情報取得装置15を用いて検出することができる。In the screen of FIG. 14, an “automatic parking start point” button for instructing the
移動場所の指示があった場合(ステップS20でYES)、自動駐車制御部11は、車両100を自動走行させて、指定された場所へ移動させる(ステップS21)。また、自動駐車制御部11は、自動走行を行いながら、移動を継続できない状態(以下「移動不可能状態」という)になったかどうかを確認する(ステップS22)。自動駐車制御部11は、例えば、他車や歩行者が妨げとなって移動できない状況が一定時間(例えば30秒)以上続くと、移動不可能状態になったと判断する。移動不可能状態になると(ステップS22でYES)、ステップS12へ戻り、自動駐車制御部11が、再度、自動駐車処理を中断させる。If there is an instruction for the moving location (YES in step S20), the automatic parking control unit 11 causes the
移動不可能状態になることなく、車両100の移動が完了すると(ステップS23でYES)、通信部13は、車両100の移動が完了した旨を携帯端末20へ通知する(ステップS24)。携帯端末20は、この通知を受けると、例えば図15のような画面を表示して、ユーザに車両100の移動完了を通知する。図15のように、移動完了の通知画面には、車両100の停車位置を示す情報を含ませるとよい。停車位置を示す情報としては、例えば、車両100のGPS受信機を用いて取得した緯度・経度の情報や、停車位置を示す地図、周辺情報取得装置15のカメラで撮影した停車位置周辺の映像、などが考えられる。When the movement of the
なお、移動場所の指示がなければ(ステップS20でNO)、自動駐車制御部11は車両100を移動させずに自動駐車処理を中止する。なお、自動駐車処理を中止した後は、車両100は正規の駐車区画の外に停車しているため、ユーザは車両100のもとへ行き、手動運転で車両100を移動させる必要がある。If there is no instruction for the moving location (NO in step S20), the automatic parking control unit 11 stops the automatic parking process without moving the
以上のように、本実施の形態に係る自動駐車システムによれば、ユーザは、車両100から降りた後も、自動駐車制御装置10による空き駐車区画の探索結果を携帯端末20を用いて確認できるとともに、目標駐車区画の選択に関する指示を行うことができる。また、自動駐車の途中で駐車不可能状態になった場合や、空き駐車区画が見つからなかった場合に、ユーザは、携帯端末20を通して、その後の処理についての指示を自動駐車制御装置10に行うことができる。このような構成により、自動駐車が円滑に行われるようになる。As described above, according to the automatic parking system according to the present embodiment, the user can check the search result of the empty parking area by the automatic
なお、本発明は、その発明の範囲内において、実施の形態を適宜、変形、省略することが可能である。In the present invention, the embodiments can be appropriately modified or omitted within the scope of the invention.
本発明は詳細に説明されたが、上記した説明は、すべての態様において、例示であって、この発明がそれに限定されるものではない。例示されていない無数の変形例が、この発明の範囲から外れることなく想定され得るものと解される。Although the present invention has been described in detail, the above description is illustrative in all aspects, and the present invention is not limited thereto. It is understood that countless variations that are not illustrated can be envisaged without departing from the scope of the present invention.
10 自動駐車制御装置、11 自動駐車制御部、12 探索部、13 通信部、15 周辺情報取得装置、16 自動運転装置、17 報知装置、20 携帯端末、21 タッチパネル、100 車両。10 automatic parking control device, 11 automatic parking control unit, 12 search unit, 13 communication unit, 15 peripheral information acquisition device, 16 automatic driving device, 17 notification device, 20 mobile terminal, 21 touch panel, 100 vehicle.
Claims (11)
Translated fromJapanese前記自動駐車制御装置との通信が可能な携帯端末と、を備え、
前記自動駐車制御装置は、空き駐車区画を探索してその探索結果を前記携帯端末へ送信し、
前記携帯端末は、前記自動駐車制御装置から前記空き駐車区画の探索結果を受信すると、ユーザの操作に基づいて、駐車区画の選択に関する指示を前記自動駐車制御装置へ送信し、
前記自動駐車制御装置は、前記携帯端末から受信した前記指示に基づいて、検出された空き駐車区画のうちから目標駐車区画を選択し、前記目標駐車区画へ前記車両を自動駐車させる
自動駐車システム。An automatic parking control device for controlling automatic parking of a vehicle having an automatic driving function;
A portable terminal capable of communicating with the automatic parking control device,
The automatic parking control device searches for an empty parking section and transmits the search result to the mobile terminal,
When the portable terminal receives the search result of the empty parking section from the automatic parking control device, based on a user operation, transmits an instruction regarding the selection of the parking section to the automatic parking control device,
The automatic parking control device is an automatic parking system that selects a target parking area from detected empty parking areas based on the instruction received from the mobile terminal, and automatically parks the vehicle in the target parking area.
前記携帯端末は、前記自動駐車制御装置から前記通知を受けると、ユーザの操作に基づいて、空き駐車区画の再探索または自動駐車処理の中止のいずれかを前記自動駐車制御装置へ指示する
請求項1に記載の自動駐車システム。The automatic parking control device performs notification to the portable terminal when an empty parking section is not detected or automatic parking becomes impossible to continue,
The portable terminal, upon receiving the notification from the automatic parking control device, instructs the automatic parking control device to either re-search for an empty parking section or to cancel automatic parking processing based on a user operation. The automatic parking system according to 1.
請求項2に記載の自動駐車システム。The automatic re-search according to claim 2, wherein the re-search instruction for the empty parking section includes an instruction to perform the re-search while the vehicle is running automatically or while the vehicle is stopped. Parking system.
請求項2に記載の自動駐車システム。The automatic parking system according to claim 2, wherein the instruction to stop the automatic parking process includes an instruction of a point to move the vehicle.
請求項1に記載の自動駐車システム。The said portable terminal presents the information of the said plurality of empty parking areas to a user when the said automatic parking control apparatus is detected, and prompts the user to select a target parking area. Automatic parking system as described.
請求項5に記載の自動駐車システム。The automatic parking system according to claim 5, wherein when the user does not select a target parking area, the automatic parking control device automatically selects the target parking area.
請求項1に記載の自動駐車システム。2. The automatic parking system according to claim 1, wherein when the automatic parking control device searches the vacant parking area while automatically driving the vehicle, the automatic parking system notifies the vehicle that the vehicle is automatically traveling.
請求項1に記載の自動駐車システム。The automatic parking system according to claim 1, wherein when the automatic parking control is performed, the automatic parking system notifies the surroundings of the vehicle that automatic parking is being performed.
請求項1に記載の自動駐車システム。2. The automatic parking system according to claim 1, wherein when performing the automatic parking, the automatic parking control device issues a warning for urging movement to a dynamic obstacle that hinders the automatic parking.
空き駐車区画を探索する探索部と、
携帯端末との通信を行う通信部と、を備え、
前記通信部は、前記探索部が空き駐車区画を探索した結果を前記携帯端末へ送信するとともに、前記携帯端末から駐車区画の選択に関するユーザの指示を受信し、
前記自動駐車制御部は、前記携帯端末からの前記指示に基づいて、検出された空き駐車区画のうちから目標駐車区画を選択し、前記目標駐車区画へ前記車両を自動駐車させる
自動駐車制御装置。An automatic parking control unit for automatically parking the vehicle;
A search unit for searching for an empty parking space;
A communication unit that communicates with the mobile terminal,
The communication unit transmits a result of the search unit searching for an empty parking area to the mobile terminal, and receives a user instruction regarding the selection of the parking area from the mobile terminal,
The said automatic parking control part is an automatic parking control apparatus which selects a target parking area from the detected empty parking areas based on the said instruction | indication from the said portable terminal, and parks the said vehicle automatically in the said target parking area.
前記自動駐車制御装置の探索部が、空き駐車区画を探索し、
前記自動駐車制御装置の通信部が、前記探索部が空き駐車区画を探索した結果を携帯端末へ送信し、
前記通信部が、前記携帯端末から駐車区画の選択に関するユーザの指示を受信し、
前記自動駐車制御装置の自動駐車制御部が、前記携帯端末からの前記指示に基づいて、検出された空き駐車区画のうちから目標駐車区画を選択し、
自動駐車制御部が、前記目標駐車区画へ前記車両を自動駐車させる
自動駐車制御方法。An automatic parking control method in an automatic parking control device for a vehicle,
The search unit of the automatic parking control device searches for an empty parking section,
The communication unit of the automatic parking control device transmits a result of the search unit searching for an empty parking area to the mobile terminal,
The communication unit receives a user instruction regarding the selection of a parking area from the mobile terminal,
The automatic parking control unit of the automatic parking control device selects a target parking area from the detected empty parking areas based on the instruction from the mobile terminal,
An automatic parking control method in which an automatic parking control unit automatically parks the vehicle in the target parking section.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201680083981.8ACN108885825B (en) | 2016-04-01 | 2016-04-01 | Automatic parking system, automatic parking control device and automatic parking control method |
| JP2018508338AJP6651001B2 (en) | 2016-04-01 | 2016-04-01 | Automatic parking system, automatic parking control device and automatic parking control method |
| DE112016006687.2TDE112016006687T5 (en) | 2016-04-01 | 2016-04-01 | Automatic parking system, automatic parking control device and automatic parking control method |
| PCT/JP2016/060939WO2017168754A1 (en) | 2016-04-01 | 2016-04-01 | Automatic parking system, automatic parking control device, and automatic parking control method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2016/060939WO2017168754A1 (en) | 2016-04-01 | 2016-04-01 | Automatic parking system, automatic parking control device, and automatic parking control method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017168754A1true WO2017168754A1 (en) | 2017-10-05 |
Family
ID=59963784
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/060939CeasedWO2017168754A1 (en) | 2016-04-01 | 2016-04-01 | Automatic parking system, automatic parking control device, and automatic parking control method |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP6651001B2 (en) |
| CN (1) | CN108885825B (en) |
| DE (1) | DE112016006687T5 (en) |
| WO (1) | WO2017168754A1 (en) |
Cited By (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018207778A1 (en)* | 2017-05-09 | 2018-11-15 | 株式会社デンソー | Automated parking system, automated parking vehicle, and automated parking method |
| JP2019079462A (en)* | 2017-10-27 | 2019-05-23 | トヨタ自動車株式会社 | Automatic driving vehicle |
| JP2019079168A (en)* | 2017-10-23 | 2019-05-23 | 株式会社デンソー | Automatic driving system, automatic driving method, and automatic driving program |
| WO2019124421A1 (en)* | 2017-12-20 | 2019-06-27 | パイオニア株式会社 | Vehicle control system |
| JP2019106098A (en)* | 2017-12-14 | 2019-06-27 | 三菱自動車工業株式会社 | Unmanned parking system |
| JP2019114055A (en)* | 2017-12-22 | 2019-07-11 | トヨタ自動車株式会社 | Controller of vehicle |
| JP2019119232A (en)* | 2017-12-28 | 2019-07-22 | 日産自動車株式会社 | Parking control method and parking control apparatus |
| JP2019192025A (en)* | 2018-04-26 | 2019-10-31 | パナソニック株式会社 | Parking monitoring system, parking monitoring method and recording medium |
| JP2020104665A (en)* | 2018-12-27 | 2020-07-09 | トヨタ自動車株式会社 | Remote travel system |
| CN111554084A (en)* | 2020-05-19 | 2020-08-18 | 新石器慧通(北京)科技有限公司 | Method for searching unmanned vehicle |
| JP2020140658A (en)* | 2019-03-01 | 2020-09-03 | 株式会社デンソー | Parking support device |
| JP2020152311A (en)* | 2019-03-22 | 2020-09-24 | パイオニア株式会社 | Movement support device |
| CN112158191A (en)* | 2020-06-24 | 2021-01-01 | 上汽通用五菱汽车股份有限公司 | Automatic parking method, system and readable storage medium |
| JPWO2019123586A1 (en)* | 2017-12-20 | 2021-01-07 | 日産自動車株式会社 | Parking control method and parking control device |
| CN112193240A (en)* | 2020-09-28 | 2021-01-08 | 惠州华阳通用电子有限公司 | Parking method based on water accumulation information |
| JPWO2019123585A1 (en)* | 2017-12-20 | 2021-01-14 | 日産自動車株式会社 | Parking control method and parking control device |
| JPWO2021054327A1 (en)* | 2019-09-17 | 2021-03-25 | ||
| EP3842321A1 (en) | 2019-12-26 | 2021-06-30 | Clarion Co., Ltd. | In-vehicle processing apparatus and in-vehicle processing system |
| JP2021195080A (en)* | 2020-06-18 | 2021-12-27 | フォルシアクラリオン・エレクトロニクス株式会社 | In-vehicle device and control method |
| CN113911109A (en)* | 2021-08-17 | 2022-01-11 | 长春一汽富晟集团有限公司 | Automatic parking system exception handling method, device, equipment and storage medium |
| CN113928309A (en)* | 2021-11-24 | 2022-01-14 | 纵目科技(上海)股份有限公司 | Automatic parking method, system, device and computer readable storage medium |
| CN114655193A (en)* | 2022-03-30 | 2022-06-24 | 岚图汽车科技有限公司 | Searching method, device, device and readable storage medium for valid parking space |
| CN115320574A (en)* | 2021-05-10 | 2022-11-11 | 丰田自动车株式会社 | Automatic parking system and control method of automatic parking system |
| JP2022181254A (en)* | 2021-05-26 | 2022-12-08 | トヨタ自動車株式会社 | remote parking device |
| WO2023173396A1 (en)* | 2022-03-18 | 2023-09-21 | 华为技术有限公司 | Parking method and apparatus, and vehicle |
| JP2024056268A (en)* | 2022-10-11 | 2024-04-23 | トヨタ自動車株式会社 | Parking assistance system, parking assistance method, parking assistance program, and remote operation program |
| JP2024140685A (en)* | 2023-03-28 | 2024-10-10 | トヨタ自動車株式会社 | Vehicle control device, vehicle control method and program |
| CN118876954A (en)* | 2024-07-24 | 2024-11-01 | 广州汽车集团股份有限公司 | Automatic parking method, device, vehicle, storage medium and program product |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109398351B (en)* | 2018-10-24 | 2021-02-19 | 广州小鹏汽车科技有限公司 | Parking control method and device and vehicle |
| CN109493632B (en)* | 2018-11-16 | 2020-10-20 | 广州小鹏汽车科技有限公司 | Automatic parking method based on multi-parking-space detection and vehicle-mounted control system |
| CN113212420B (en)* | 2018-12-25 | 2022-05-31 | 西安艾润物联网技术服务有限责任公司 | Automatic parking method, device and readable storage medium |
| JP7338342B2 (en)* | 2019-09-17 | 2023-09-05 | トヨタ自動車株式会社 | automatic parking system |
| CN110466510A (en)* | 2019-09-17 | 2019-11-19 | 安徽江淮汽车集团股份有限公司 | Autonomous parking system and method |
| DE102019215435A1 (en)* | 2019-10-09 | 2021-04-15 | Robert Bosch Gmbh | Method and device for warning a person at risk in the vicinity of an automated vehicle |
| JP7541843B2 (en)* | 2020-03-19 | 2024-08-29 | 本田技研工業株式会社 | Vehicle control device |
| JP7414020B2 (en)* | 2021-01-07 | 2024-01-16 | トヨタ自動車株式会社 | Automatic parking system and automatic parking system control method |
| WO2022205357A1 (en)* | 2021-04-01 | 2022-10-06 | 深圳市大疆创新科技有限公司 | Autonomous driving control method, electronic device, mobile terminal, and vehicle |
| CN113183951A (en)* | 2021-05-19 | 2021-07-30 | 广州小鹏汽车科技有限公司 | Interaction method and device based on automatic driving |
| CN113724525B (en)* | 2021-06-07 | 2023-01-20 | 云度新能源汽车有限公司 | Automatic passenger-replacing patrol type parking method and system based on big data platform and storage device |
| EP4401061A4 (en)* | 2021-09-24 | 2025-01-22 | Shenzhen Yinwang Intelligent Technologies Co., Ltd. | METHOD AND DEVICE FOR AUTOMATED PARKING OF VALUABLES |
| CN114155730A (en)* | 2021-12-02 | 2022-03-08 | 广州小鹏自动驾驶科技有限公司 | Information output method, control device, vehicle, and readable storage medium |
| KR20240008186A (en)* | 2022-07-11 | 2024-01-18 | 삼성전자주식회사 | Method of parking for electronic device using uwb communication and apparatus thereof |
| DE102024100013A1 (en) | 2024-01-02 | 2025-07-03 | Valeo Schalter Und Sensoren Gmbh | Method for operating an at least partially automated motor vehicle by a teleoperator, computer program product, computer-readable storage medium and assistance system |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015153145A (en)* | 2014-02-14 | 2015-08-24 | トヨタ自動車株式会社 | Parking assistance system |
| JP2015230641A (en)* | 2014-06-06 | 2015-12-21 | トヨタ自動車株式会社 | Automatic parking system |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005321868A (en)* | 2004-05-06 | 2005-11-17 | Hitachi Kokusai Electric Inc | Parking lot management system |
| JP4205640B2 (en)* | 2004-07-16 | 2009-01-07 | 株式会社日本自動車部品総合研究所 | Automatic parking system |
| JP4458975B2 (en)* | 2004-07-29 | 2010-04-28 | アマノ株式会社 | Parking lot management system |
| JP4178154B2 (en)* | 2005-08-30 | 2008-11-12 | 松下電器産業株式会社 | Parking position search support device, method and program |
| JP2008009913A (en)* | 2006-06-30 | 2008-01-17 | Toyota Motor Corp | Automatic vehicle driving system |
| JP4910991B2 (en)* | 2007-11-08 | 2012-04-04 | 株式会社デンソー | Parking lot guidance system |
| CN102407848A (en)* | 2010-09-21 | 2012-04-11 | 高强 | Controller system with automatic parking and intelligent driving functions |
| CN202200978U (en)* | 2011-06-29 | 2012-04-25 | 广东好帮手电子科技股份有限公司 | Automatic parking system |
| DE102011082826A1 (en)* | 2011-09-16 | 2013-03-21 | Robert Bosch Gmbh | A method for assisting an automatic parking operation of a parking assistance system of a vehicle and a corresponding vehicle |
| DE102012007986A1 (en) | 2012-04-20 | 2013-10-24 | Valeo Schalter Und Sensoren Gmbh | Remote maneuvering of a motor vehicle using a portable communication device |
| JP2014196009A (en) | 2013-03-29 | 2014-10-16 | パナソニック株式会社 | Parking assistant, portable terminal used for parking assistant, and program |
| CN103225432B (en)* | 2013-04-10 | 2015-08-26 | 上海交通大学 | A kind of intelligent three-dimensional garage |
| CN103247179A (en)* | 2013-05-15 | 2013-08-14 | 王明伟 | Community parking space sharing and use reserving service system based on vehicle identification |
| CN103465906B (en)* | 2013-08-27 | 2016-01-20 | 东莞中国科学院云计算产业技术创新与育成中心 | A kind of parking area automatic train stop implementation method based on telepresenc |
| JP6120371B2 (en)* | 2013-10-23 | 2017-04-26 | クラリオン株式会社 | Automatic parking control device and parking assist device |
| CN103680201B (en)* | 2013-12-10 | 2015-08-05 | 中国石油大学(华东) | A kind of city intelligent shutdown system |
| CN103632572A (en)* | 2013-12-17 | 2014-03-12 | 重庆大学 | Intelligent parking method and system |
| JP6330509B2 (en)* | 2014-06-20 | 2018-05-30 | 住友電気工業株式会社 | Parking management system, management device, and parking management method |
| JP6327008B2 (en)* | 2014-06-24 | 2018-05-23 | 住友電気工業株式会社 | Vehicle control device, vehicle, and vehicle parking determination method |
| US9805602B2 (en)* | 2014-07-21 | 2017-10-31 | Ford Global Technologies, Llc | Parking service |
| CN104464371A (en)* | 2014-12-12 | 2015-03-25 | 天津易华录信息技术有限公司 | Autonomous parking stall selecting system |
| CN104742881A (en)* | 2015-04-15 | 2015-07-01 | 百度在线网络技术(北京)有限公司 | Automatic parking system and method |
- 2016
- 2016-04-01WOPCT/JP2016/060939patent/WO2017168754A1/ennot_activeCeased
- 2016-04-01CNCN201680083981.8Apatent/CN108885825B/enactiveActive
- 2016-04-01DEDE112016006687.2Tpatent/DE112016006687T5/enactivePending
- 2016-04-01JPJP2018508338Apatent/JP6651001B2/enactiveActive
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015153145A (en)* | 2014-02-14 | 2015-08-24 | トヨタ自動車株式会社 | Parking assistance system |
| JP2015230641A (en)* | 2014-06-06 | 2015-12-21 | トヨタ自動車株式会社 | Automatic parking system |
Cited By (55)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10981599B2 (en) | 2017-05-09 | 2021-04-20 | Denso Corporation | Automated parking system, automated parking vehicle, and automated parking method |
| JP2018188027A (en)* | 2017-05-09 | 2018-11-29 | 株式会社デンソー | Automatic valet parking system, automatic valet vehicle and automatic valet parking method |
| WO2018207778A1 (en)* | 2017-05-09 | 2018-11-15 | 株式会社デンソー | Automated parking system, automated parking vehicle, and automated parking method |
| JP2019079168A (en)* | 2017-10-23 | 2019-05-23 | 株式会社デンソー | Automatic driving system, automatic driving method, and automatic driving program |
| JP7006124B2 (en) | 2017-10-23 | 2022-01-24 | 株式会社デンソー | Self-driving system, self-driving method, and self-driving program |
| US11822338B2 (en) | 2017-10-27 | 2023-11-21 | Toyota Jidosha Kabushiki Kaisha | Automatic drive vehicle |
| JP2019079462A (en)* | 2017-10-27 | 2019-05-23 | トヨタ自動車株式会社 | Automatic driving vehicle |
| JP2019106098A (en)* | 2017-12-14 | 2019-06-27 | 三菱自動車工業株式会社 | Unmanned parking system |
| WO2019124421A1 (en)* | 2017-12-20 | 2019-06-27 | パイオニア株式会社 | Vehicle control system |
| US11305756B2 (en) | 2017-12-20 | 2022-04-19 | Nissan Motor Co., Ltd. | Parking control method and parking control apparatus |
| JP7067567B2 (en) | 2017-12-20 | 2022-05-16 | 日産自動車株式会社 | Parking control method and parking control device |
| JPWO2019123586A1 (en)* | 2017-12-20 | 2021-01-07 | 日産自動車株式会社 | Parking control method and parking control device |
| US11634118B2 (en) | 2017-12-20 | 2023-04-25 | Nissan Motor Co., Ltd. | Parking control method and parking control apparatus |
| JPWO2019123585A1 (en)* | 2017-12-20 | 2021-01-14 | 日産自動車株式会社 | Parking control method and parking control device |
| JP2019114055A (en)* | 2017-12-22 | 2019-07-11 | トヨタ自動車株式会社 | Controller of vehicle |
| JP2019119232A (en)* | 2017-12-28 | 2019-07-22 | 日産自動車株式会社 | Parking control method and parking control apparatus |
| JP7020113B2 (en) | 2017-12-28 | 2022-02-16 | 日産自動車株式会社 | Parking control method and parking control device |
| JP7081972B2 (en) | 2018-04-26 | 2022-06-07 | i-PRO株式会社 | Parking monitoring system, parking monitoring method and recording medium |
| JP2019192025A (en)* | 2018-04-26 | 2019-10-31 | パナソニック株式会社 | Parking monitoring system, parking monitoring method and recording medium |
| JP2020104665A (en)* | 2018-12-27 | 2020-07-09 | トヨタ自動車株式会社 | Remote travel system |
| JP7089226B2 (en) | 2018-12-27 | 2022-06-22 | トヨタ自動車株式会社 | Remote driving system |
| US11807222B2 (en) | 2019-03-01 | 2023-11-07 | Denso Corporation | Parking assistance device |
| CN113508428B (en)* | 2019-03-01 | 2023-11-17 | 株式会社电装 | Parking assist device |
| JP2020140658A (en)* | 2019-03-01 | 2020-09-03 | 株式会社デンソー | Parking support device |
| JP7172740B2 (en) | 2019-03-01 | 2022-11-16 | 株式会社デンソー | parking assist device |
| CN113508428A (en)* | 2019-03-01 | 2021-10-15 | 株式会社电装 | Parking assist apparatus |
| JP2020152311A (en)* | 2019-03-22 | 2020-09-24 | パイオニア株式会社 | Movement support device |
| JP7329343B2 (en) | 2019-03-22 | 2023-08-18 | パイオニア株式会社 | Mobility support device |
| US20220203969A1 (en)* | 2019-09-17 | 2022-06-30 | Denso Corporation | Parking assist apparatus |
| US12017643B2 (en)* | 2019-09-17 | 2024-06-25 | Denso Corporation | Parking assist apparatus |
| JP7310903B2 (en) | 2019-09-17 | 2023-07-19 | 株式会社デンソー | PARKING ASSIST DEVICE AND PARKING ASSIST METHOD |
| JPWO2021054327A1 (en)* | 2019-09-17 | 2021-03-25 | ||
| WO2021054327A1 (en)* | 2019-09-17 | 2021-03-25 | 株式会社デンソー | Parking assist apparatus and parking assist method |
| US11358592B2 (en) | 2019-12-26 | 2022-06-14 | Clarion Co., Ltd. | In-vehicle processing apparatus and in-vehicle processing system |
| EP3842321A1 (en) | 2019-12-26 | 2021-06-30 | Clarion Co., Ltd. | In-vehicle processing apparatus and in-vehicle processing system |
| CN111554084A (en)* | 2020-05-19 | 2020-08-18 | 新石器慧通(北京)科技有限公司 | Method for searching unmanned vehicle |
| US11926313B2 (en) | 2020-06-18 | 2024-03-12 | Faurecia Clarion Electronics Co., Ltd. | In-vehicle device and control method |
| JP7505927B2 (en) | 2020-06-18 | 2024-06-25 | フォルシアクラリオン・エレクトロニクス株式会社 | In-vehicle device and control method |
| JP2021195080A (en)* | 2020-06-18 | 2021-12-27 | フォルシアクラリオン・エレクトロニクス株式会社 | In-vehicle device and control method |
| CN112158191A (en)* | 2020-06-24 | 2021-01-01 | 上汽通用五菱汽车股份有限公司 | Automatic parking method, system and readable storage medium |
| CN112193240A (en)* | 2020-09-28 | 2021-01-08 | 惠州华阳通用电子有限公司 | Parking method based on water accumulation information |
| CN115320574A (en)* | 2021-05-10 | 2022-11-11 | 丰田自动车株式会社 | Automatic parking system and control method of automatic parking system |
| JP2022181254A (en)* | 2021-05-26 | 2022-12-08 | トヨタ自動車株式会社 | remote parking device |
| JP7663022B2 (en) | 2021-05-26 | 2025-04-16 | トヨタ自動車株式会社 | Remote Parking Device |
| CN113911109A (en)* | 2021-08-17 | 2022-01-11 | 长春一汽富晟集团有限公司 | Automatic parking system exception handling method, device, equipment and storage medium |
| CN113928309B (en)* | 2021-11-24 | 2024-04-30 | 纵目科技(上海)股份有限公司 | Automatic parking method, system, equipment and computer readable storage medium |
| CN113928309A (en)* | 2021-11-24 | 2022-01-14 | 纵目科技(上海)股份有限公司 | Automatic parking method, system, device and computer readable storage medium |
| WO2023173396A1 (en)* | 2022-03-18 | 2023-09-21 | 华为技术有限公司 | Parking method and apparatus, and vehicle |
| CN114655193A (en)* | 2022-03-30 | 2022-06-24 | 岚图汽车科技有限公司 | Searching method, device, device and readable storage medium for valid parking space |
| CN114655193B (en)* | 2022-03-30 | 2024-11-22 | 岚图汽车科技有限公司 | Method, device, equipment and readable storage medium for searching effective parking spaces |
| JP2024056268A (en)* | 2022-10-11 | 2024-04-23 | トヨタ自動車株式会社 | Parking assistance system, parking assistance method, parking assistance program, and remote operation program |
| JP7704122B2 (en) | 2022-10-11 | 2025-07-08 | トヨタ自動車株式会社 | Parking assistance system, parking assistance method, parking assistance program, and remote operation program |
| JP2024140685A (en)* | 2023-03-28 | 2024-10-10 | トヨタ自動車株式会社 | Vehicle control device, vehicle control method and program |
| JP7750259B2 (en) | 2023-03-28 | 2025-10-07 | トヨタ自動車株式会社 | Vehicle control device, vehicle control method and program |
| CN118876954A (en)* | 2024-07-24 | 2024-11-01 | 广州汽车集团股份有限公司 | Automatic parking method, device, vehicle, storage medium and program product |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112016006687T5 (en) | 2018-12-20 |
| CN108885825B (en) | 2022-06-14 |
| CN108885825A (en) | 2018-11-23 |
| JPWO2017168754A1 (en) | 2018-07-05 |
| JP6651001B2 (en) | 2020-02-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6651001B2 (en) | Automatic parking system, automatic parking control device and automatic parking control method | |
| JP7465668B2 (en) | In-vehicle device, parking assistance system, and parking assistance method | |
| JP7505927B2 (en) | In-vehicle device and control method | |
| WO2017068694A1 (en) | Parking support method and parking support device | |
| JP7233426B2 (en) | Parking assistance system and parking assistance device | |
| JP2012108868A (en) | Operation system for vehicle occupant non-operation | |
| KR101964541B1 (en) | Method for operating a vehicle communication device during an autonomous mode, a communication device, and an automobile | |
| JP2018163112A (en) | Automatic parking control method, automatic parking control device using the same, and program | |
| JP2018151962A (en) | Parking assistance method, parking assistance device using the same, automatic operation control device, program | |
| JPWO2019058781A1 (en) | Parking assistance device | |
| US11628829B2 (en) | Operating a motor vehicle | |
| JP2014196009A (en) | Parking assistant, portable terminal used for parking assistant, and program | |
| JP2018163113A (en) | Parking support method, parking support device using the same, movement control device, and program | |
| JP2019128844A (en) | Parking device | |
| WO2020115517A1 (en) | Vehicle travel control device and vehicle travel control method for parking | |
| WO2015033470A1 (en) | Drive assist device, and drive assist method | |
| WO2017154092A1 (en) | Driving assistance device, driving assistance system, and driving assistance method | |
| JP2014100958A (en) | Parking support device and control device | |
| US20230286495A1 (en) | Control device, control method, and computer-readable recording medium | |
| JP2021162960A (en) | Storage area management device | |
| US20210082285A1 (en) | Method for mobile parking assistance | |
| JP2018176938A (en) | Automatic parking support device and automatic parking support method | |
| JP7483426B2 (en) | Remote control system and operation terminal | |
| JP2023028609A (en) | Automatic driving system, automatic driving method and program | |
| JP7555712B2 (en) | Parking assistance device and parking assistance method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| ENP | Entry into the national phase | Ref document number:2018508338 Country of ref document:JP Kind code of ref document:A | |
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application | Ref document number:16896971 Country of ref document:EP Kind code of ref document:A1 | |
| 122 | Ep: pct application non-entry in european phase | Ref document number:16896971 Country of ref document:EP Kind code of ref document:A1 |