WO2016184398A1 - Boundary line pulse signal identification system and method, and intelligent mowing system - Google Patents
Boundary line pulse signal identification system and method, and intelligent mowing systemDownload PDFInfo
- Publication number
- WO2016184398A1 WO2016184398A1PCT/CN2016/082635CN2016082635WWO2016184398A1WO 2016184398 A1WO2016184398 A1WO 2016184398A1CN 2016082635 WCN2016082635 WCN 2016082635WWO 2016184398 A1WO2016184398 A1WO 2016184398A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- pulse signal
- signal
- environmental
- pulse
- predetermined value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images






Classifications
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D34/00—Mowers; Mowing apparatus of harvesters
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D75/00—Accessories for harvesters or mowers
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
Definitions
- the present inventionrelates to the field of boundary signals, and more particularly to a pulse signal recognition system and method applied to a boundary line of a smart lawn mower.
- the inventionalso relates to a smart mowing system.
- the boundary systemis usually used to control the walking path of the automatic walking device.
- the boundary systemincludes: a signal generating unit that generates a preset boundary signal; a boundary line electrically connected to the signal generating unit, the preset boundary signal is transmitted along the boundary line, and generates a preset magnetic field signal; the signal detecting unit sets In the automatic walking device, for detecting a magnetic field signal in the environment, generating a detection signal; a number processing unit electrically connected to the signal detecting unit, receiving the detection signal, and the detection signal is processed to form a processing signal;
- the control unitreceives the processing signal, and confirms the position of the automatic walking device relative to the boundary line according to the information represented by the processing signal, and controls the automatic walking device to timely change the walking direction of the automatic walking device when crossing the boundary line to prevent the automatic walking device from being moved.
- the preset boundary signal sent by the early boundary systemis a pulse signal.
- the advantage of this boundary signalis that the identification is easy, but the problem is that the boundary system cannot distinguish the pulse signal from the boundary signal with the interference pulse signal, so that the boundary system is When receiving the interfering pulse signal, it is mistaken to be the boundary signal and control the walking path of the autonomous walking device according to the information carried by it, so that the boundary system is easily interfered, and the wrong judgment is made, and the anti-interference of the boundary system is reduced. ability.
- the poor anti-interference ability of the above-mentioned boundary systemis more reflected in the field of intelligent lawn mowers.
- the traditional technologymainly reduces the sensitivity of detection by adjusting the automatic boundary line sensor installed on the intelligent lawn mower, that is, when there is interference, the sensitivity of the sensor detection is reduced. Filter out the source of interference.
- the distance between two adjacent boundary linesneeds to be at least 1 to 2 meters apart, and the distance between adjacent boundary lines cannot be shortened.
- the interval between the lawns of adjacent usersis generally only one fence. If the distance between adjacent boundary lines is more than 1 meter or more, when the boundary line is arranged, more grass clipping between the two boundary lines will result. At the same time, these cut grasses must be manually cut by the user, which significantly reduces the customer experience.
- a boundary line pulse signal identification systemincludes a pulse circuit module and a detection circuit module, wherein the pulse circuit module is configured to generate a pulse signal transmitted on a boundary line, and the pulse signal generated by the pulse circuit module includes:
- the detecting circuit modulereceives a pulse signal generated by the pulse circuit module, and identifies the boundary line by detecting a high pulse signal or a low pulse signal of the pulse signal.
- the detection circuit modulehas a detection sensitivity reference value when detecting a high pulse signal is higher than a detection sensitivity reference value when detecting a low pulse signal.
- the form of the high pulse signalis different from the form of the low pulse signal.
- the high pulse signaloccurs at least once per second.
- the amplitude value of the generated high pulse signalis not less than the set minimum amplitude value, and the amplitude value of the generated low pulse signal is not greater than The highest amplitude value.
- the high pulse signal generated during the period Tis less than the low pulse signal.
- the detection circuit moduleincludes:
- a detecting unitconfigured to receive an environmental signal and perform multiple amplification on the environmental signal, the external signal including the pulse signal;
- control unitconnected to the detecting unit, configured to detect a high pulse signal of the pulse signal from an environmental signal amplified by the detecting unit to identify the boundary line.
- the control unitdetects the identified by comparing the amplitude value of the environmental signal with a predetermined value.
- the accuracy of the boundary line, and the size of the predetermined valueis fixed when the accuracy of the recognition reaches an expected value.
- control unitadjusts the accuracy of the identified boundary line by comparing the amplitude value of the environmental signal with a magnitude of a predetermined value, the control unit sequentially adjusting the small to large The magnitude of the predetermined value, and the magnitude of the predetermined value is fixed when the amplitude values of the received environmental signals are the same or similar.
- the control unitdynamically adjusts a multiple of the amplification of the detecting unit, and compares the environmental signals by The amplitude value is a magnitude of the predetermined value to detect the accuracy of the identified boundary line.
- control unitdynamically adjusts the magnification of the detection unit, adjusts the size of the predetermined value, and fixes the received value when the amplitude values of the environmental signals are the same or similar.
- the multiple and the size of the predetermined valueare the same or similar.
- a smart mowing systemcomprising a smart lawn mower and a boundary line, further comprising the pulse signal recognition system of any of the preceding embodiments, wherein the detection circuit module is located on the intelligent lawn mower, the pulse circuit The module connects the boundary lines.
- a method for identifying a pulse signal of a boundary linecomprising:
- the magnitude of the predetermined valueis adjusted in order from small to large.
- a method for identifying a pulse signal of a boundary linecomprising:
- the detected amplitude values of the environmental signalsare not the same or similar, adjusting the magnification of the amplification and the magnitude of the predetermined value, and entering the step of performing multiple amplification on the environmental signal until the detected The amplitude values of the environmental signals are the same or similar.
- the amplification multiple and the predetermined valueare adjusted, if the environmental signal is not received under the current predetermined value, the multiple is adjusted from small to large, if the current predetermined value is Upon receiving the environmental signal, the predetermined value is adjusted from small to large.
- the pulse signalis a pulse wave between high and low pulse phases, and the combination of high and low pulses can effectively shorten the distance between two boundary lines, and specifically shorten the distance between the two boundary lines to Within 1 meter, it effectively enhances the customer experience.
- Figure 1is a schematic diagram of a conventional boundary line signal
- Figure 2is a schematic view of the distance between adjacent boundary lines
- Figure 3is a schematic diagram of a pulse signal in an embodiment
- FIG. 4is a schematic diagram of a pulse signal in another embodiment
- FIG. 5is a structural diagram of a detection circuit module in a pulse signal recognition system of a boundary line according to an embodiment
- FIG. 6is a flow chart showing a method for identifying a pulse signal of a boundary line according to an embodiment
- Fig. 7is a flow chart showing a method of identifying a pulse signal of a boundary line of another embodiment.
- Intelligent lawn mowersusually have to work within a certain boundary line. Usually adjacent lawns have boundary lines. When laying boundary lines, signal interference between boundary lines and boundary lines must be taken into consideration, and other signal interferences, such as AC line signals, intelligent mowing of other companies, must be considered. Machine boundary line signals, pet dog electronic fences, etc. If the interference of these signals causes the intelligent mower to not recognize the boundary line, the intelligent mower cannot perform the mowing operation normally. When the boundary line is normally laid, if the intelligent mower can accurately identify the boundary signal, the boundary signal with strong signal strength must be transmitted on the boundary line. As shown in Figure 1, the general practice is to continuously transmit on the boundary line. High pulse signal, the sensitivity of the mower detection is always in a highly sensitive state.
- the boundary linecan be detected in real time, because the boundary line signal is too strong, the adjacent boundary line must be kept at a sufficient distance to ensure that the signal will not be maintained. Interference with each other, the conventional technology when laying the boundary line, as shown in Figure 2, requires a distance of 2 meters or even a larger distance between adjacent boundary lines.
- the pulse signal identification system of the boundary line of an embodiment of the present inventionincludes a pulse circuit module and a detection circuit module, and the pulse circuit module is configured to generate a pulse signal transmitted on the boundary line, and the pulse signal generated by the pulse circuit module includes :
- the detecting circuit modulereceives the pulse signal generated by the pulse circuit module, and identifies the boundary line by detecting a high pulse signal or a low pulse of the pulse signal. That is, the detection circuit module can detect a high pulse signal or a low pulse signal, and can identify the boundary line according to either or both.
- the pulse signalmay be a continuous signal starting from a high pulse signal, or as shown in FIG. 4, the pulse signal may also be a continuous signal starting from a low pulse signal.
- the high pulse signal generated in the period Tis less than the low pulse signal.
- the number of high pulse signalsis much less than the number of low pulse signals.
- the amplitude values of the rush signal and the low pulse signalare set, and the lowest amplitude value of the high pulse signal and the highest amplitude value of the low pulse signal are specified, and the lowest amplitude value of the high pulse signal is greater than the highest amplitude value of the low pulse signal.
- the amplitude values of the generated high pulse signalsare not less than the set minimum amplitude values, and the amplitude values of the generated low pulse signals are not greater than the set maximum amplitude values, Obviously distinguish between high pulse or low pulse to accurately identify the boundary line. As shown in FIG. 3 and FIG.
- the boundary line signal waveformincludes a high pulse plus a plurality of low pulses, and the corresponding boundary line detection sensitivity also includes a high sensitivity plus a number of time low sensitivity.
- the combination of high pulse and high sensitivitycan tell the intelligent mower that there is a boundary line currently, so that the detection distance of the boundary line is not shortened.
- the combination of low pulse and low detection sensitivitycan filter out most of the interference signals and improve the anti-interference ability. However, since the overall intensity of the transmitted signal of the boundary line is reduced, the interference capability between the boundary lines is also reduced accordingly.
- the pulse circuit moduleemits a low pulse
- the sensitivity of the detection circuit moduleis set to be low
- the environmental noiseis difficult to be recognized by the detection circuit module, so that most of the time, the detection The circuit module has good anti-interference performance.
- the intelligent moweris close to the boundary, a low pulse signal can be detected; if it is far from the boundary line, a low pulse signal will not be detected, and it is impossible to judge whether it is based on the low pulse signal. Located in the work area.
- the pulse circuit moduleemits a high pulse
- the sensitivity of the detection circuit moduleis set to be high, which ensures that the intelligent lawn mower is far away from the boundary line, and the detection circuit module It is also possible to periodically detect a high pulse signal to determine whether it is located in the work area. In order to maintain the necessary stability, the high pulse signal appears at least once in one second.
- the sensitivity of the detection circuit module when detecting a low pulseis lower than when detecting a high pulse.
- the sensitivity of the detection circuit modulecan be adjusted in real time according to environmental interference conditions. For example, when detecting a high pulse signal, if the noise is strong, the sensitivity is lowered, thereby causing detection in an extreme case.
- the sensitivity at high pulse signalsis lower than the sensitivity at the time of detecting a low pulse signal at a specific time.
- the sensitivity reference value, the upper limit, and the lower limit when detecting the low pulse signalare still lower than the sensitivity reference value, the upper limit, and the lower limit when the high pulse is detected, respectively.
- the combination of low frequency high pulse and high frequency low pulse in time period Tdoes not increase the risk of out of bounds In this case, the mutual interference of the boundary lines is reduced and the overall energy consumption of the boundary lines is reduced. Specifically, when the intelligent mower is far from the boundary, it is impossible to quickly rush out of the boundary. At this time, only the low-frequency high-pulse signal is detected and there is no large risk of out-of-bounds; When the machine is close to the boundary, it can detect the high pulse signal and the low pulse signal, that is, the frequency based on the boundary signal to confirm whether it is within the boundary line is much higher than that when the distance is far from the boundary, and the fuselage part is out of bounds.
- the detection circuit modulemainly detects the boundary signal in a low sensitivity state, and is also relatively difficult. It is disturbed by noise, which greatly reduces the mutual interference of the boundary lines as a whole. Also, since the main body of the boundary signal is a low-pulse signal with low energy consumption, the overall energy consumption of the pulse circuit module is low; and, since the effective coverage area of the high-pulse signal therein is large, the solution can also ensure the large-area working area. Usability, in particular, it is pointed out that if this scheme is not used, but the coverage of the entire working area is ensured by increasing the strength of all signals in a large area of work, its energy consumption and adjacent boundary interference may be unacceptably large.
- the aforementioned high pulse signal and low pulse signalare in different forms.
- the waveforms of the two signalsare different, such as two different ones of a square wave, a triangular wave, and a sine wave; for example, the pulse widths of the two signals are different.
- the detecting circuit moduleis capable of recognizing that the received signal is a high pulse or a low pulse according to the form of the signal.
- One of the advantages of this embodimentis that the detecting circuit module does not have to divide the detection period into a low sensitivity portion and a high sensitivity portion in time. The high pulse and the low pulse can be separated for subsequent processing.
- the detection circuit modulewhen the detection circuit module can detect a low pulse, it represents that the intelligent lawn mower is close to the boundary line, and when the low pulse cannot be detected, it represents that the intelligent lawn mower is far from the boundary line.
- the intelligent lawn mowercan change the working mode based on the judgment, for example, reducing the walking speed when approaching the boundary line, avoiding punching out of the boundary, and the like.
- the pulse signalis a high-low pulse phase pulse wave
- the combination of high and low pulsescan effectively shorten the distance between the two boundary lines, and specifically shorten the distance between the two boundary lines to within 1 meter. Effectively enhance the customer experience.
- the detection circuit module in the pulse signal system of the boundary line of an embodimentincludes a detecting unit 121 and a control unit 122.
- the detection circuit modulecan be installed in the intelligent lawn mower. By detecting the circuit module, the intelligent lawn mower can accurately and quickly identify the boundary line signal.
- the detecting unit 121is configured to receive an environmental signal and perform multiple amplification on the environmental signal.
- the environmental signalcan be various signals from the outside, including pulse signals transmitted by the boundary line. When the ambient signal is multiplied, the magnification may be fixed or floating.
- the control unit 122 connected to the detecting unitis configured to detect a high pulse signal of the pulse signal from the environmental signal amplified by the detecting unit 121 to identify the boundary line. If the magnification of the amplification in the detecting unit is fixed, the control unit detects the accuracy of the identified boundary line by comparing the amplitude value of the environmental signal with the magnitude of the predetermined value, and fixes the predetermined time when the recognized accuracy reaches the expected value. The size of the value. The size of the predetermined value may be adjusted, and the control unit 122 may adjust the size of the predetermined value from small to large, and fix the predetermined value when the amplitude values of the received environment signals are the same or similar.
- the control unit 122may also adjust the magnitude of the predetermined value from large to small, and fix the predetermined value when the amplitude values of the received environment signals are the same or similar. If it is necessary to adjust the predetermined value from small to large, it is necessary to set the initial value of the predetermined value to be slightly smaller, and the final value after successively increasing may be the lowest amplitude value of the specified high pulse signal, or a larger value; It is necessary to adjust the predetermined value from large to small, and it is necessary to set the initial value of the predetermined value slightly larger, and the minimum value of the initial value of the predetermined value needs to be greater than or equal to the lowest amplitude value of the prescribed high pulse signal.
- the control unit 122may dynamically adjust the multiple of the amplification by the detecting unit 121, and compare the amplitude value of the environmental signal with the magnitude of the predetermined value to detect the accuracy of the identified boundary line. .
- the control unit 122dynamically adjusts the magnification of the detection unit 121, adjusts the magnitude of the predetermined value, and fixes the magnitude of the multiple and the predetermined value when the amplitude values of the received environmental signals are the same or similar.
- the multiple and the predetermined valueare specifically set, if the environmental signal is not received under the current predetermined value, it indicates that the amplified signal strength is not high enough, and the adjustment signal may be adjusted from small to large to further enlarge the environmental signal, if the current predetermined value The environment signal is received, indicating that the multiple of the ambient signal amplification is sufficiently large. If the amplitude values of the received environmental signals are not equal or similar, the predetermined value is small, and the predetermined value may be adjusted from small to large.
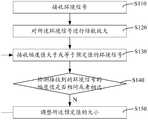
- the pulse signal identifying method of the boundary line of an embodimentincludes steps S110 to S150.
- Step S110receiving an environmental signal.
- the environmental signalincludes the pulse signal on the boundary line received by the intelligent mower when working in the boundary line, and also includes various external signals, such as AC wire signals, and other The company's intelligent lawn mower boundary line signals, pet dog's electronic fence and so on.
- the pulse signal on the boundary linemay be a continuous signal starting from a high pulse signal, or as shown in FIG. 4, the pulse signal may also be a continuous signal starting from a low pulse signal.
- the high pulse signal generated in the period Tis less than the low pulse signal. Usually during the period T, the number of high pulse signals is much less than the number of low pulse signals.
- the amplitude values of the high pulse signal and the low pulse signalcan be set, and the lowest amplitude value of the high pulse signal and the highest amplitude value of the low pulse signal are specified, and the high pulse signal is The lowest amplitude value is greater than the highest amplitude value of the low pulse signal.
- the amplitude values of the generated high pulse signalsare not less than the set minimum amplitude values, and the amplitude values of the generated low pulse signals are not greater than the set maximum amplitude values, Obviously distinguish between high pulse or low pulse to accurately identify the boundary line. As shown in FIG. 3 and FIG.
- the boundary line signal waveformincludes a high pulse plus a plurality of low pulses, and the corresponding boundary line detection sensitivity also includes a high sensitivity plus a number of time low sensitivity.
- the combination of high pulse and high sensitivitycan tell the intelligent mower that there is a boundary line currently, so that the detection distance of the boundary line is not shortened.
- the combination of low pulse and low detection sensitivitycan filter out most of the interference signals and improve the anti-interference ability. However, since the overall intensity of the transmitted signal of the boundary line is reduced, the interference capability between the boundary lines is also reduced accordingly.
- step S120the ambient signal is multiplied.
- the intensity of the ambient signalis low, which is not conducive to detecting the boundary signal. Therefore, the boundary line signal needs to be amplified.
- Step S130receiving an environmental signal whose amplitude value is greater than or equal to a predetermined value.
- the non-boundary signalcan be filtered out by comparing the amplitude value of the ambient signal with a predetermined value.
- the signal generated by the boundary lineis usually the strongest, so the boundary signal can be detected by the setting of the predetermined value.
- Step S140detecting whether the amplitude values of the received environmental signals are the same or similar.
- the amplitude value of the finally received environmental signalmay be the same or may be maintained in a certain floating interval. As long as the amplitude value of the environmental signal is greater than the lowest amplitude value of the set pulse signal, the interference signal is filtered out. .
- step S150if the detected amplitude values of the environmental signals are not the same or similar, the magnitude of the predetermined value is adjusted, and the process proceeds to step S130 until the detected amplitude values of the environmental signals are the same or similar.
- the predetermined valuemay be variably adjusted. 2
- the size of the predetermined valuemay be adjusted from small to large, and the predetermined value may be fixed when the amplitude values of the received environment signals are the same or similar. It is also possible to adjust the magnitude of the predetermined value from large to small, and fix the predetermined value when the amplitude values of the received environment signals are the same or similar.
- the initial value of the predetermined valuemay be slightly smaller, and the final value after successively increasing may be the lowest amplitude value of the specified high pulse signal, or a larger value; It is necessary to adjust the predetermined value from large to small, and it is necessary to set the initial value of the predetermined value slightly larger, and the minimum value of the initial value of the predetermined value needs to be greater than or equal to the lowest amplitude value of the prescribed high pulse signal.
- the pulse signal identification method of the above boundary line, the pulse signalis a high-low pulse phase pulse wave, and the combination of high and low pulses can effectively shorten the distance between the two boundary lines, and specifically shorten the distance between the two boundary lines to within 1 meter. Effectively enhance the customer experience.
- the pulse signal identifying method of the boundary line of another embodimentincludes steps S120 to S1110 to step S1150.
- Step S1110receiving an environmental signal.
- the environmental signalincludes the pulse signal on the boundary line received by the intelligent mower when working in the boundary line, and also includes various external signals, such as AC wire signals, other company's intelligent lawn mower boundary line signals, and pet dogs. Electronic fences, etc.
- the pulse signal on the boundary linemay be a continuous signal starting from a high pulse signal, or as shown in FIG. 4, the pulse signal may also be a continuous signal starting from a low pulse signal.
- step S1120the ambient signal is multiplied.
- the intensity of the ambient signalis low, which is not conducive to detecting the boundary signal. Therefore, the boundary line signal needs to be amplified.
- Step S1130receiving an environmental signal whose amplitude value is greater than or equal to a predetermined value.
- the non-boundary signalcan be filtered out by comparing the amplitude value of the ambient signal with a predetermined value.
- the signal generated by the boundary lineis usually the strongest, so the boundary signal can be detected by the setting of the predetermined value.
- Step S1140Detect whether the amplitude values of the received environmental signals are the same or similar.
- the amplitude value of the finally received environmental signalmay be the same or may be maintained in a certain floating interval. As long as the amplitude value of the environmental signal is greater than the lowest amplitude value of the set pulse signal, the interference signal is filtered out. .
- Step S1150If the detected amplitude values of the environmental signals are not the same or similar, adjust the amplification multiple and the predetermined value, and proceed to step S1120 until the detected environmental signals have the same or similar amplitude values.
- the multiple and the predetermined valueare specifically set, if the environmental signal is not received under the current predetermined value, it indicates that the amplified signal strength is not high enough, and the adjustment signal may be adjusted from small to large to further enlarge the environmental signal, if the current predetermined value The environment signal is received, indicating that the multiple of the ambient signal amplification is sufficiently large. If the amplitude values of the received environmental signals are not equal or similar, the predetermined value is small, and the predetermined value may be adjusted from small to large.
- the pulse signal identification method of the above boundary line, the pulse signalis a high-low pulse phase pulse wave, and the combination of high and low pulses can effectively shorten the distance between the two boundary lines, and specifically shorten the distance between the two boundary lines to within 1 meter. Effectively enhance the customer experience.
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Life Sciences & Earth Sciences (AREA)
- Environmental Sciences (AREA)
- Aviation & Aerospace Engineering (AREA)
- Harvester Elements (AREA)
- Radar Systems Or Details Thereof (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
Description
Translated fromChinese本发明涉及边界信号领域,特别是涉及一种应用于智能割草机的边界线的脉冲信号识别系统及方法。本发明还涉及一种智能割草系统。The present invention relates to the field of boundary signals, and more particularly to a pulse signal recognition system and method applied to a boundary line of a smart lawn mower. The invention also relates to a smart mowing system.
随着科学技术的发展,智能的自动行走设备为人们所熟知,由于自动行走设备可以自动预先设置的程序执行预先设置的相关任务,无须人为的操作与干预,因此在工业应用及家居产品上的应用非常广泛。工业上的应用如执行各种功能的机器人,家居产品上的应用如割草机、吸尘器等,这些智能的自动行走设备极大地节省了人们的时间,给工业生产及家居生活都带来了极大的便利。With the development of science and technology, intelligent automatic walking equipment is well known. Since the automatic walking equipment can automatically perform preset tasks in advance, it does not require manual operation and intervention, so it is used in industrial applications and household products. The application is very extensive. Industrial applications such as robots that perform various functions, applications on household products such as lawn mowers, vacuum cleaners, etc. These intelligent automatic walking devices greatly save people's time and bring extremes to industrial production and home life. Great convenience.
为保证上述自动行走设备在预设的工作范围内工作,通常采用边界系统对自动行走设备的行走路径进行控制。所述边界系统包括:信号发生单元,产生预设的边界信号;边界线,与信号发生单元电性连接,预设的边界信号沿边界线传导,并生成预设的磁场信号;信号检测单元,设置在所述自动行走设备内,用于检测环境中的磁场信号,生成检测信号;号处理单元,与信号检测单元电性连接,收所述检测信号,所述检测信号进行处理,成处理信号;控制单元接收所述处理信号,并根据所述处理信号代表的信息,确认自动行走设备相对边界线的位置,控制自动行走设备的在跨越边界线时及时转换自动行走设备行走方向,防止自动行走设备行走至边界线外,从而使自动行走设备始终在边界线内工作。早期的边界系统发送的预设的边界信号为脉冲信号,此种边界信号的优势在于识别容易,但存在的问题是边界系统无法区分来自边界信号的脉冲信号与干扰的脉冲信号,使得边界系统在接收到干扰的脉冲信号时,误以为是边界信号而根据其携带的信息对自动行走设备的行走路径进行控制,使得边界系统很容易受到干扰,而做出错误判断,降低了边界系统的抗干扰能力。In order to ensure that the above-mentioned automatic walking device works within a preset working range, the boundary system is usually used to control the walking path of the automatic walking device. The boundary system includes: a signal generating unit that generates a preset boundary signal; a boundary line electrically connected to the signal generating unit, the preset boundary signal is transmitted along the boundary line, and generates a preset magnetic field signal; the signal detecting unit sets In the automatic walking device, for detecting a magnetic field signal in the environment, generating a detection signal; a number processing unit electrically connected to the signal detecting unit, receiving the detection signal, and the detection signal is processed to form a processing signal; The control unit receives the processing signal, and confirms the position of the automatic walking device relative to the boundary line according to the information represented by the processing signal, and controls the automatic walking device to timely change the walking direction of the automatic walking device when crossing the boundary line to prevent the automatic walking device from being moved. Walk outside the boundary line so that the autonomous vehicle always works within the boundary line. The preset boundary signal sent by the early boundary system is a pulse signal. The advantage of this boundary signal is that the identification is easy, but the problem is that the boundary system cannot distinguish the pulse signal from the boundary signal with the interference pulse signal, so that the boundary system is When receiving the interfering pulse signal, it is mistaken to be the boundary signal and control the walking path of the autonomous walking device according to the information carried by it, so that the boundary system is easily interfered, and the wrong judgment is made, and the anti-interference of the boundary system is reduced. ability.
以上所述边界系统的抗干扰能力差的情况更多体现在智能割草机领域。在智能割草机领域,传统技术主要是通过调整安装在智能割草机上的自动边界线传感器降低检测的灵敏度,即当发现有干扰时,降低传感器检测的灵敏度,以过滤掉干扰源。但这种情况下,一般两个相邻边界线至少需要间隔1~2米的距离,仍然无法使相邻边界线之间的距离能缩短。通常相邻用户的草坪之间的间隔一般只有一个栅栏,如果相邻边界线的距离超过1米甚至更远,在布置边界线时就会导致两个边界线之间的较多的草地割不到,而这些割不到的草地必须用户亲自手动切割,明显降低了客户的体验。The poor anti-interference ability of the above-mentioned boundary system is more reflected in the field of intelligent lawn mowers. In the field of intelligent lawn mowers, the traditional technology mainly reduces the sensitivity of detection by adjusting the automatic boundary line sensor installed on the intelligent lawn mower, that is, when there is interference, the sensitivity of the sensor detection is reduced.Filter out the source of interference. However, in this case, generally, the distance between two adjacent boundary lines needs to be at least 1 to 2 meters apart, and the distance between adjacent boundary lines cannot be shortened. Usually, the interval between the lawns of adjacent users is generally only one fence. If the distance between adjacent boundary lines is more than 1 meter or more, when the boundary line is arranged, more grass clipping between the two boundary lines will result. At the same time, these cut grasses must be manually cut by the user, which significantly reduces the customer experience.
发明内容Summary of the invention
基于此,有必要针对客户体验较低的问题,提供一种应用于智能割草机的边界线的脉冲信号识别系统及方法。Based on this, it is necessary to provide a pulse signal recognition system and method applied to the boundary line of the intelligent lawn mower for the problem of low customer experience.
一种边界线的脉冲信号识别系统,包括脉冲电路模块和检测电路模块,所述脉冲电路模块用于生成在边界线上传输的脉冲信号,所述脉冲电路模块生成的脉冲信号包括:A boundary line pulse signal identification system includes a pulse circuit module and a detection circuit module, wherein the pulse circuit module is configured to generate a pulse signal transmitted on a boundary line, and the pulse signal generated by the pulse circuit module includes:
在周期T内生成的至少一个高脉冲信号以及与所述高脉冲信号连续分布的若干低脉冲信号;或者At least one high pulse signal generated during period T and a plurality of low pulse signals continuously distributed with the high pulse signal; or
在周期T内生成的若干低脉冲信号以及在所述若干低脉冲信号之间分布的一个或多个高脉冲信号;a plurality of low pulse signals generated during period T and one or more high pulse signals distributed between said plurality of low pulse signals;
所述检测电路模块接收所述脉冲电路模块生成的脉冲信号,并通过检测所述脉冲信号的高脉冲信号或低脉冲信号识别所述边界线。The detecting circuit module receives a pulse signal generated by the pulse circuit module, and identifies the boundary line by detecting a high pulse signal or a low pulse signal of the pulse signal.
在其中一个实施例中,所述检测电路模块在检测高脉冲信号时的检测灵敏度基准值高于在检测低脉冲信号时的检测灵敏度基准值。In one embodiment, the detection circuit module has a detection sensitivity reference value when detecting a high pulse signal is higher than a detection sensitivity reference value when detecting a low pulse signal.
在其中一个实施例中,所述高脉冲信号的形式和所述低脉冲信号的形式不同。In one of the embodiments, the form of the high pulse signal is different from the form of the low pulse signal.
在其中一个实施例中,:所述高脉冲信号每秒至少出现一次。In one of the embodiments, the high pulse signal occurs at least once per second.
在其中一个实施例中,在包括多个周期T的时间段中,所述生成的高脉冲信号的幅度值不小于设定的最低幅度值,所述生成的低脉冲信号的幅度值不大于设定的最高幅度值。In one embodiment, in the period of time including the plurality of periods T, the amplitude value of the generated high pulse signal is not less than the set minimum amplitude value, and the amplitude value of the generated low pulse signal is not greater than The highest amplitude value.
在其中一个实施例中,所述在周期T内生成的所述高脉冲信号少于所述低脉冲信号。In one of the embodiments, the high pulse signal generated during the period T is less than the low pulse signal.
在其中一个实施例中,所述检测电路模块包括:In one embodiment, the detection circuit module includes:
检测单元,用于接收环境信号并对所述环境信号进行倍数放大,所述外部信号包括所述脉冲信号;以及a detecting unit, configured to receive an environmental signal and perform multiple amplification on the environmental signal, the external signal including the pulse signal;
与所述检测单元连接的控制单元,用于从所述检测单元放大后的环境信号中检测所述脉冲信号的高脉冲信号以识别所述边界线。a control unit connected to the detecting unit, configured to detect a high pulse signal of the pulse signal from an environmental signal amplified by the detecting unit to identify the boundary line.
在其中一个实施例中,所述检测单元对所述环境信号进行倍数放大时,所述倍数为固定倍数,所述控制单元通过对比所述环境信号的幅度值与预定值的大小以检测识别的所述边界线的准确度,并在识别的准确度达到预期值时,固定所述预定值的大小。In one embodiment, when the detecting unit multiplies the environmental signal, the multiple is a fixed multiple, and the control unit detects the identified by comparing the amplitude value of the environmental signal with a predetermined value. The accuracy of the boundary line, and the size of the predetermined value is fixed when the accuracy of the recognition reaches an expected value.
在其中一个实施例中,所述控制单元通过对比所述环境信号的幅度值与预定值的大小以检测识别的所述边界线的准确度时,所述控制单元依次由小到大调整所述预定值的大小,并在接收所述环境信号的幅度值相同或者相近时,固定所述预定值的大小。In one embodiment, the control unit adjusts the accuracy of the identified boundary line by comparing the amplitude value of the environmental signal with a magnitude of a predetermined value, the control unit sequentially adjusting the small to large The magnitude of the predetermined value, and the magnitude of the predetermined value is fixed when the amplitude values of the received environmental signals are the same or similar.
在其中一个实施例中,所述检测单元对所述环境信号进行倍数放大时,所述倍数为浮动倍数,所述控制单元动态调整所述检测单元放大的倍数,并通过对比所述环境信号的幅度值与预定值的大小以检测识别的所述边界线的准确度。In one embodiment, when the detecting unit performs multiple amplification on the environmental signal, the multiple is a floating multiple, and the control unit dynamically adjusts a multiple of the amplification of the detecting unit, and compares the environmental signals by The amplitude value is a magnitude of the predetermined value to detect the accuracy of the identified boundary line.
在其中一个实施例中,所述控制单元动态调整所述检测单元放大的倍数的同时,调整所述预定值的大小,并在接收的所述环境信号的幅度值相同或者相近时,固定所述倍数和预定值的大小。In one embodiment, the control unit dynamically adjusts the magnification of the detection unit, adjusts the size of the predetermined value, and fixes the received value when the amplitude values of the environmental signals are the same or similar. The multiple and the size of the predetermined value.
一种智能割草系统,包括智能割草机和边界线,还包括前述实施例中任一所述的脉冲信号识别系统,其中所述检测电路模块位于所述智能割草机上,所述脉冲电路模块连接所述边界线。A smart mowing system comprising a smart lawn mower and a boundary line, further comprising the pulse signal recognition system of any of the preceding embodiments, wherein the detection circuit module is located on the intelligent lawn mower, the pulse circuit The module connects the boundary lines.
一种边界线的脉冲信号识别方法,包括:A method for identifying a pulse signal of a boundary line, comprising:
接收环境信号;Receiving an environmental signal;
对所述环境信号进行倍数放大;Multiplying the environmental signal by a magnification;
接收幅度值大于或等于预定值的环境信号;Receiving an environmental signal whose amplitude value is greater than or equal to a predetermined value;
检测接收到的所述环境信号的幅度值是否相同或者相近;Detecting whether the amplitude values of the received environmental signals are the same or similar;
若检测到的所述环境信号的幅度值不是相同或者相近,则调整所述预定值的大小,并进入所述接收幅度值大于或等于预定值的环境信号的步骤,直到检测到的所述环境信号的幅度值相同或者相近。Adjusting the predetermined value if the detected amplitude values of the environmental signals are not the same or similarAnd the step of entering the environmental signal whose received amplitude value is greater than or equal to a predetermined value until the detected amplitude values of the environmental signals are the same or similar.
在其中一个实施例中,由小到大依次调整所述预定值的大小。In one of the embodiments, the magnitude of the predetermined value is adjusted in order from small to large.
一种边界线的脉冲信号识别方法,包括:A method for identifying a pulse signal of a boundary line, comprising:
接收环境信号;Receiving an environmental signal;
对所述环境信号进行倍数放大;Multiplying the environmental signal by a magnification;
接收幅度值大于或等于预定值的环境信号;Receiving an environmental signal whose amplitude value is greater than or equal to a predetermined value;
检测接收到的所述环境信号的幅度值是否相同或者相近;Detecting whether the amplitude values of the received environmental signals are the same or similar;
若检测到的所述环境信号的幅度值不是相同或者相近,则调整所述放大的倍数和预定值的大小,并进入所述对所述环境信号进行倍数放大的步骤,直到检测到的所述环境信号的幅度值相同或者相近。If the detected amplitude values of the environmental signals are not the same or similar, adjusting the magnification of the amplification and the magnitude of the predetermined value, and entering the step of performing multiple amplification on the environmental signal until the detected The amplitude values of the environmental signals are the same or similar.
在其中一个实施例中,所述调整所述放大的倍数和预定值的大小时,若在当前预定值下未接收到环境信号,则由小到大调整所述倍数,若在当前预定值下接收到所述环境信号,则由小到大调整所述预定值的大小。In one embodiment, when the amplification multiple and the predetermined value are adjusted, if the environmental signal is not received under the current predetermined value, the multiple is adjusted from small to large, if the current predetermined value is Upon receiving the environmental signal, the predetermined value is adjusted from small to large.
以上所述边界线的脉冲信号识别系统及方法,脉冲信号为高低脉冲相间的脉冲波,高低脉冲的组合可有效缩短两个边界线的距离,具体可使两个边界线之间的距离缩短至1米以内,有效地提升了客户的体验。The pulse signal identification system and method for the above boundary line, the pulse signal is a pulse wave between high and low pulse phases, and the combination of high and low pulses can effectively shorten the distance between two boundary lines, and specifically shorten the distance between the two boundary lines to Within 1 meter, it effectively enhances the customer experience.
图1为传统边界线信号的示意图;Figure 1 is a schematic diagram of a conventional boundary line signal;
图2为相邻边界线之间距离的示意图;Figure 2 is a schematic view of the distance between adjacent boundary lines;
图3为一实施例中脉冲信号的示意图;Figure 3 is a schematic diagram of a pulse signal in an embodiment;
图4为另一实施例中脉冲信号的示意图;4 is a schematic diagram of a pulse signal in another embodiment;
图5为一实施例的边界线的脉冲信号识别系统中检测电路模块的结构图;5 is a structural diagram of a detection circuit module in a pulse signal recognition system of a boundary line according to an embodiment;
图6为一实施例的边界线的脉冲信号识别方法的流程图;6 is a flow chart showing a method for identifying a pulse signal of a boundary line according to an embodiment;
图7为另一实施例的边界线的脉冲信号识别方法的流程图。Fig. 7 is a flow chart showing a method of identifying a pulse signal of a boundary line of another embodiment.
121检测单元 122控制单元121
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。In order to make the objects, technical solutions and advantages of the present invention more clear, the followingThe invention will be further described in detail by way of examples. It is understood that the specific embodiments described herein are merely illustrative of the invention and are not intended to limit the invention.
智能割草机通常必须在一定的边界线内工作。通常相邻的草坪均具有边界线,在铺设边界线时,必须考虑到边界线与边界线之间的信号干扰,还要考虑到其它的信号干扰,比如交流电线信号、其他公司的智能割草机边界线信号、宠物狗的电子围栏等等。如果这些信号的干扰导致智能割草机无法识别出边界线,智能割草机则无法正常进行割草作业。在正常铺设边界线时,如果要智能割草机能够准确的识别边界信号,必须在边界线上传输信号强度较强的边界信号,如图1所示,一般的做法是在边界线上连续传输高脉冲信号,割草机检测时的灵敏度一直处于高度灵敏状态,虽然可以实时检测到边界线,但由于边界线信号过强,相邻边界线在铺设时必须保持足够的距离才能保证信号不会互相干扰,常规的技术在铺设边界线时,如图2所示,相邻边界线之间需要2米的距离,甚至更大的距离。Intelligent lawn mowers usually have to work within a certain boundary line. Usually adjacent lawns have boundary lines. When laying boundary lines, signal interference between boundary lines and boundary lines must be taken into consideration, and other signal interferences, such as AC line signals, intelligent mowing of other companies, must be considered. Machine boundary line signals, pet dog electronic fences, etc. If the interference of these signals causes the intelligent mower to not recognize the boundary line, the intelligent mower cannot perform the mowing operation normally. When the boundary line is normally laid, if the intelligent mower can accurately identify the boundary signal, the boundary signal with strong signal strength must be transmitted on the boundary line. As shown in Figure 1, the general practice is to continuously transmit on the boundary line. High pulse signal, the sensitivity of the mower detection is always in a highly sensitive state. Although the boundary line can be detected in real time, because the boundary line signal is too strong, the adjacent boundary line must be kept at a sufficient distance to ensure that the signal will not be maintained. Interference with each other, the conventional technology when laying the boundary line, as shown in Figure 2, requires a distance of 2 meters or even a larger distance between adjacent boundary lines.
为此,本发明提供的一实施例的边界线的脉冲信号识别系统包括脉冲电路模块和检测电路模块,脉冲电路模块用于生成在边界线上传输的脉冲信号,脉冲电路模块生成的脉冲信号包括:To this end, the pulse signal identification system of the boundary line of an embodiment of the present invention includes a pulse circuit module and a detection circuit module, and the pulse circuit module is configured to generate a pulse signal transmitted on the boundary line, and the pulse signal generated by the pulse circuit module includes :
在周期T内生成的至少一个高脉冲信号以及与高脉冲信号连续分布的若干低脉冲信号;或者At least one high pulse signal generated during the period T and a plurality of low pulse signals continuously distributed with the high pulse signal; or
在周期T内生成的若干低脉冲信号以及在若干低脉冲信号之间分布的一个或多个高脉冲信号;a plurality of low pulse signals generated during period T and one or more high pulse signals distributed between the plurality of low pulse signals;
检测电路模块接收脉冲电路模块生成的脉冲信号,并通过检测脉冲信号的高脉冲信号或低脉冲识别边界线。即检测电路模块可检测到高脉冲信号或者低脉冲信号,并可根据其中任一或者两者识别边界线。The detecting circuit module receives the pulse signal generated by the pulse circuit module, and identifies the boundary line by detecting a high pulse signal or a low pulse of the pulse signal. That is, the detection circuit module can detect a high pulse signal or a low pulse signal, and can identify the boundary line according to either or both.
具体如图3所示,脉冲信号可以是由一个高脉冲信号开始的连续信号,或者如图4所示,脉冲信号也可以是由一个低脉冲信号开始的连续信号。为了保证在可以检测出边界线的同时,又充分降低边界线之间的干扰,在周期T内生成的高脉冲信号少于低脉冲信号。通常在周期T内,高脉冲信号的个数远少于低脉冲信号的个数。为了明显的区别出高脉冲信号与低脉冲信号,可以对高脉冲信号与低脉冲信号的幅度值进行设置,规定高脉冲信号的最低幅度值和低脉冲信号的最高幅度值,且高脉冲信号的最低幅度值大于低脉冲信号的最高幅度值。这样,在包括多个周期T的时间段中,生成的高脉冲信号的幅度值均不小于设定的最低幅度值,生成的低脉冲信号的幅度值均不大于设定的最高幅度值,可以明显的区分出是高脉冲还是低脉冲,准确识别出边界线。如图3与图4所示,边界线信号波型包括一个高脉冲加若干个低脉冲,对应的边界线检测灵敏度也相应的包括一个高灵敏度加若干时间低灵敏度。高脉冲对应高灵敏度的组合可以给告诉智能割草机当前存在边界线,这样不会缩短边界线的检测距离。而低脉冲与低检测灵敏度的组合则可以过滤掉大部分的干扰信号,提高抗干扰能力。但由于边界线的发射信号整体强度降低了,因此,边界线互相之间的干扰能力也相应降低了。Specifically, as shown in FIG. 3, the pulse signal may be a continuous signal starting from a high pulse signal, or as shown in FIG. 4, the pulse signal may also be a continuous signal starting from a low pulse signal. In order to ensure that the boundary line can be detected while sufficiently reducing the interference between the boundary lines, the high pulse signal generated in the period T is less than the low pulse signal. Usually during the period T, the number of high pulse signals is much less than the number of low pulse signals. In order to clearly distinguish between a high pulse signal and a low pulse signal, it is possible toThe amplitude values of the rush signal and the low pulse signal are set, and the lowest amplitude value of the high pulse signal and the highest amplitude value of the low pulse signal are specified, and the lowest amplitude value of the high pulse signal is greater than the highest amplitude value of the low pulse signal. Thus, in the period including the plurality of periods T, the amplitude values of the generated high pulse signals are not less than the set minimum amplitude values, and the amplitude values of the generated low pulse signals are not greater than the set maximum amplitude values, Obviously distinguish between high pulse or low pulse to accurately identify the boundary line. As shown in FIG. 3 and FIG. 4, the boundary line signal waveform includes a high pulse plus a plurality of low pulses, and the corresponding boundary line detection sensitivity also includes a high sensitivity plus a number of time low sensitivity. The combination of high pulse and high sensitivity can tell the intelligent mower that there is a boundary line currently, so that the detection distance of the boundary line is not shortened. The combination of low pulse and low detection sensitivity can filter out most of the interference signals and improve the anti-interference ability. However, since the overall intensity of the transmitted signal of the boundary line is reduced, the interference capability between the boundary lines is also reduced accordingly.
也就是说,在一个时间周期T内的大部分时间中,脉冲电路模块发射低脉冲、检测电路模块的灵敏度设置为低,环境噪声难以被检测电路模块识别到,从而在大部分时间中,检测电路模块具有较好的抗干扰性能。在该大部分时间中,如果智能割草机距离边界较近,则可以检测到低脉冲信号;如果距离边界线较远,则将检测不到低脉冲信号,无法基于低脉冲信号来判断自身是否位于工作区域中。然而,作为补充,在一个时间周期T内的小部分时间中,脉冲电路模块发射高脉冲、检测电路模块的灵敏度设置为高,这可以保证智能割草机即使距离边界线较远,检测电路模块也能定期的检测到高脉冲信号,判断自身是否位于工作区域中。为了维持必要的稳定性,一秒内高脉冲信号至少出现一次。That is to say, during most of the time period T, the pulse circuit module emits a low pulse, the sensitivity of the detection circuit module is set to be low, and the environmental noise is difficult to be recognized by the detection circuit module, so that most of the time, the detection The circuit module has good anti-interference performance. In most of the time, if the intelligent mower is close to the boundary, a low pulse signal can be detected; if it is far from the boundary line, a low pulse signal will not be detected, and it is impossible to judge whether it is based on the low pulse signal. Located in the work area. However, as a supplement, during a small period of time in a time period T, the pulse circuit module emits a high pulse, and the sensitivity of the detection circuit module is set to be high, which ensures that the intelligent lawn mower is far away from the boundary line, and the detection circuit module It is also possible to periodically detect a high pulse signal to determine whether it is located in the work area. In order to maintain the necessary stability, the high pulse signal appears at least once in one second.
通常,检测电路模块在检测低脉冲时的灵敏度低于检测高脉冲时的灵敏度。然而,在一种实施例中,检测电路模块的灵敏度能够根据环境干扰情况实时调整,例如,在检测高脉冲信号时,如果噪声较强,则会调低灵敏度,从而导致在极端情况下,检测高脉冲信号时的灵敏度在特定时刻低于检测低脉冲信号时的灵敏度。但此时,检测低脉冲信号时的灵敏度基准值、上限和下限仍分别低于检测高脉冲时的灵敏度基准值、上限和下限。Generally, the sensitivity of the detection circuit module when detecting a low pulse is lower than when detecting a high pulse. However, in one embodiment, the sensitivity of the detection circuit module can be adjusted in real time according to environmental interference conditions. For example, when detecting a high pulse signal, if the noise is strong, the sensitivity is lowered, thereby causing detection in an extreme case. The sensitivity at high pulse signals is lower than the sensitivity at the time of detecting a low pulse signal at a specific time. However, at this time, the sensitivity reference value, the upper limit, and the lower limit when detecting the low pulse signal are still lower than the sensitivity reference value, the upper limit, and the lower limit when the high pulse is detected, respectively.
时间周期T内低频率高脉冲和高频率低脉冲的组合在没有增大出界风险的情况下,降低了边界线的相互干扰,并降低了边界线的总体能耗。具体来说,在智能割草机距离边界较远的时候,不可能很快冲出边界,此时仅检测到较低频率的高脉冲信号也不会有大的出界风险;而当智能割草机距离边界较近的时候,能够检测到高脉冲信号和低脉冲信号,也就是此时基于边界信号确认是否位于边界线以内的频率相较距离边界较远的时候提高很多,发现机身部分出界后可以立即折返回界内,不会大幅出界。同时,由于边界信号的主体为低脉冲信号,强度低,覆盖范围小,多个边界系统之间较不容易产生相互干扰;且检测电路模块主要在低灵敏度状态下检测边界信号,也较不容易被噪声干扰,从而在整体上大幅降低了边界线相互干扰。同样由于边界信号的主体为能耗低的低脉冲信号,脉冲电路模块的整体能耗低;并且,由于其中的高脉冲信号的有效覆盖面积大,本方案还能保证在大面积工作区域中的可用性,尤其需要指出,如果不采用本方案,而是在大面积工作区域中通过增大全部信号的强度的方式保证覆盖全部工作区域,其能耗以及相邻边界干扰可能会大到难以接受。The combination of low frequency high pulse and high frequency low pulse in time period T does not increase the risk of out of boundsIn this case, the mutual interference of the boundary lines is reduced and the overall energy consumption of the boundary lines is reduced. Specifically, when the intelligent mower is far from the boundary, it is impossible to quickly rush out of the boundary. At this time, only the low-frequency high-pulse signal is detected and there is no large risk of out-of-bounds; When the machine is close to the boundary, it can detect the high pulse signal and the low pulse signal, that is, the frequency based on the boundary signal to confirm whether it is within the boundary line is much higher than that when the distance is far from the boundary, and the fuselage part is out of bounds. After that, you can immediately return to the inside of the boundary without going out of bounds. At the same time, since the main body of the boundary signal is a low pulse signal, the intensity is low, the coverage is small, and mutual interference is less likely to occur between multiple boundary systems; and the detection circuit module mainly detects the boundary signal in a low sensitivity state, and is also relatively difficult. It is disturbed by noise, which greatly reduces the mutual interference of the boundary lines as a whole. Also, since the main body of the boundary signal is a low-pulse signal with low energy consumption, the overall energy consumption of the pulse circuit module is low; and, since the effective coverage area of the high-pulse signal therein is large, the solution can also ensure the large-area working area. Usability, in particular, it is pointed out that if this scheme is not used, but the coverage of the entire working area is ensured by increasing the strength of all signals in a large area of work, its energy consumption and adjacent boundary interference may be unacceptably large.
在本发明的另一实施例中,前述高脉冲信号和低脉冲信号的形式不同。例如,两种信号的波形不同,如分别为方波、三角波、正弦波等中的不同两种;又如,两种信号的脉宽不同等等。检测电路模块能够根据信号的形式识别出接收到的信号为高脉冲或低脉冲,该实施例的优势之一在于检测电路模块不必将检测周期在时间上划分为低灵敏度部分和高灵敏度部分,而可以将高脉冲和低脉冲分离开后进行后续处理。在以上各实施例中,在检测电路模块能够检测到低脉冲时,代表智能割草机离边界线较近,不能检测到低脉冲时,代表智能割草机离边界线较远。智能割草机能够基于该判断而变化工作方式,例如,在距离边界线较近时降低行走速度,避免冲出界外等。In another embodiment of the invention, the aforementioned high pulse signal and low pulse signal are in different forms. For example, the waveforms of the two signals are different, such as two different ones of a square wave, a triangular wave, and a sine wave; for example, the pulse widths of the two signals are different. The detecting circuit module is capable of recognizing that the received signal is a high pulse or a low pulse according to the form of the signal. One of the advantages of this embodiment is that the detecting circuit module does not have to divide the detection period into a low sensitivity portion and a high sensitivity portion in time. The high pulse and the low pulse can be separated for subsequent processing. In the above embodiments, when the detection circuit module can detect a low pulse, it represents that the intelligent lawn mower is close to the boundary line, and when the low pulse cannot be detected, it represents that the intelligent lawn mower is far from the boundary line. The intelligent lawn mower can change the working mode based on the judgment, for example, reducing the walking speed when approaching the boundary line, avoiding punching out of the boundary, and the like.
以上边界线的脉冲信号识别系统,脉冲信号为高低脉冲相间的脉冲波,高低脉冲的组合可有效缩短两个边界线的距离,具体可使两个边界线之间的距离缩短至1米以内,有效地提升了客户的体验。The pulse signal recognition system of the above boundary line, the pulse signal is a high-low pulse phase pulse wave, and the combination of high and low pulses can effectively shorten the distance between the two boundary lines, and specifically shorten the distance between the two boundary lines to within 1 meter. Effectively enhance the customer experience.
如图5所示,一实施例的边界线的脉冲信号系统中检测电路模块包括检测单元121和控制单元122。检测电路模块可以安装于智能割草机中,通过检测电路模块,智能割草机即可准确快速识别边界线信号。As shown in FIG. 5, the detection circuit module in the pulse signal system of the boundary line of an embodiment includes a detecting
检测单元121用于接收环境信号并对环境信号进行倍数放大。环境信号可以是外界的各种信号,包括边界线传输的脉冲信号。对环境信号进行倍数放大时,放大的倍数可以是固定的,也可以是浮动调节的。The detecting
与检测单元连接的控制单元122用于从检测单元121放大后的环境信号中检测脉冲信号的高脉冲信号以识别边界线。如果检测单元中的放大的倍数是固定的,则控制单元通过对比环境信号的幅度值与预定值的大小以检测识别的边界线的准确度,并在识别的准确度达到预期值时,固定预定值的大小。预定值的大小可以变动调整,控制单元122可以依次由小到大调整预定值的大小,并在接收环境信号的幅度值相同或者相近时,固定预定值的大小。控制单元122也可以由大到小调整预定值的大小,并在接收环境信号的幅度值相同或者相近时,固定预定值的大小。如果需要由小到大调整预定值,则需要将预定值的初始值设置的稍微小一点,逐次调大后的最终值可以是规定的高脉冲信号的最低幅度值,或者更大的值;如果需要由大到小调整预定值,将需要将预定值的初始值设置的稍微大一点,且预定值的初始值的最小值需要大于或等于规定的高脉冲信号的最低幅度值。如果检测单元中的放大的倍数是可以浮动调整的,则控制单元122可以动态调整检测单元121放大的倍数,并通过对比环境信号的幅度值与预定值的大小以检测识别的边界线的准确度。其中,控制单元122动态调整检测单元121放大的倍数的同时,调整预定值的大小,并在接收的环境信号的幅度值相同或者相近时,固定倍数和预定值的大小。具体设置倍数和预定值时,若在当前预定值下未接收到环境信号,说明放大后的信号强度还不够高,可以由小到大调整倍数,进一步对环境信号进行放大,若在当前预定值下接收到环境信号,说明环境信号放大的倍数已经足够大,此时如果接收的环境信号的幅度值不相等或者相近,说明预定值较小,此时可以由小到大调整预定值的大小。The
如图6所示,一实施例的边界线的脉冲信号识别方法包括步骤S110至步骤S150。As shown in FIG. 6, the pulse signal identifying method of the boundary line of an embodiment includes steps S110 to S150.
步骤S110,接收环境信号。环境信号包括智能割草机在边界线内工作时接收到的边界线上的脉冲信号,也包括外部的各种信号,如交流电线信号、其他公司的智能割草机边界线信号、宠物狗的电子围栏等。如图3所示,边界线上的脉冲信号可以是由一个高脉冲信号开始的连续信号,或者如图4所示,脉冲信号也可以是由一个低脉冲信号开始的连续信号。为了保证在可以检测出边界线的同时,又充分降低边界线之间的干扰,在周期T内生成的高脉冲信号少于低脉冲信号。通常在周期T内,高脉冲信号的个数远少于低脉冲信号的个数。为了明显的区别出高脉冲信号与低脉冲信号,可以对高脉冲信号与低脉冲信号的幅度值进行设置,规定高脉冲信号的最低幅度值和低脉冲信号的最高幅度值,且高脉冲信号的最低幅度值大于低脉冲信号的最高幅度值。这样,在包括多个周期T的时间段中,生成的高脉冲信号的幅度值均不小于设定的最低幅度值,生成的低脉冲信号的幅度值均不大于设定的最高幅度值,可以明显的区分出是高脉冲还是低脉冲,准确识别出边界线。如图3与图4所示,边界线信号波型包括一个高脉冲加若干个低脉冲,对应的边界线检测灵敏度也相应的包括一个高灵敏度加若干时间低灵敏度。高脉冲对应高灵敏度的组合可以给告诉智能割草机当前存在边界线,这样不会缩短边界线的检测距离。而低脉冲与低检测灵敏度的组合则可以过滤掉大部分的干扰信号,提高抗干扰能力。但由于边界线的发射信号整体强度降低了,因此,边界线互相之间的干扰能力也相应降低了。Step S110, receiving an environmental signal. The environmental signal includes the pulse signal on the boundary line received by the intelligent mower when working in the boundary line, and also includes various external signals, such as AC wire signals, and otherThe company's intelligent lawn mower boundary line signals, pet dog's electronic fence and so on. As shown in FIG. 3, the pulse signal on the boundary line may be a continuous signal starting from a high pulse signal, or as shown in FIG. 4, the pulse signal may also be a continuous signal starting from a low pulse signal. In order to ensure that the boundary line can be detected while sufficiently reducing the interference between the boundary lines, the high pulse signal generated in the period T is less than the low pulse signal. Usually during the period T, the number of high pulse signals is much less than the number of low pulse signals. In order to clearly distinguish the high pulse signal from the low pulse signal, the amplitude values of the high pulse signal and the low pulse signal can be set, and the lowest amplitude value of the high pulse signal and the highest amplitude value of the low pulse signal are specified, and the high pulse signal is The lowest amplitude value is greater than the highest amplitude value of the low pulse signal. Thus, in the period including the plurality of periods T, the amplitude values of the generated high pulse signals are not less than the set minimum amplitude values, and the amplitude values of the generated low pulse signals are not greater than the set maximum amplitude values, Obviously distinguish between high pulse or low pulse to accurately identify the boundary line. As shown in FIG. 3 and FIG. 4, the boundary line signal waveform includes a high pulse plus a plurality of low pulses, and the corresponding boundary line detection sensitivity also includes a high sensitivity plus a number of time low sensitivity. The combination of high pulse and high sensitivity can tell the intelligent mower that there is a boundary line currently, so that the detection distance of the boundary line is not shortened. The combination of low pulse and low detection sensitivity can filter out most of the interference signals and improve the anti-interference ability. However, since the overall intensity of the transmitted signal of the boundary line is reduced, the interference capability between the boundary lines is also reduced accordingly.
步骤S120,对环境信号进行倍数放大。通常环境信号的强度较低,不利于检测边界信信号,因此,需要对边界线信号进行放大。In step S120, the ambient signal is multiplied. Usually the intensity of the ambient signal is low, which is not conducive to detecting the boundary signal. Therefore, the boundary line signal needs to be amplified.
步骤S130,接收幅度值大于或等于预定值的环境信号。将环境信号的幅度值与预定值进行对比,可以将非边界信号过滤掉。割草机在边界线内工作时,边界线产生的信号通常是强度最强的,因此,通过预定值的设置可以检测到边界信号。Step S130, receiving an environmental signal whose amplitude value is greater than or equal to a predetermined value. The non-boundary signal can be filtered out by comparing the amplitude value of the ambient signal with a predetermined value. When the mower works in the boundary line, the signal generated by the boundary line is usually the strongest, so the boundary signal can be detected by the setting of the predetermined value.
步骤S140,检测接收到的环境信号的幅度值是否相同或者相近。最终接收到的环境信号的幅度值可以是相同的,也可以保持在某个浮动区间,只要整体上环境信号的幅度值均大于设置的脉冲信号的最低幅度值,则说明干扰信号均被过滤掉。Step S140, detecting whether the amplitude values of the received environmental signals are the same or similar. The amplitude value of the finally received environmental signal may be the same or may be maintained in a certain floating interval. As long as the amplitude value of the environmental signal is greater than the lowest amplitude value of the set pulse signal, the interference signal is filtered out. .
步骤S150,若检测到的环境信号的幅度值不是相同或者相近,则调整预定值的大小,并进入步骤S130,直到检测到的环境信号的幅度值相同或者相近。预定值的大小可以变动调整,2可以依次由小到大调整预定值的大小,并在接收环境信号的幅度值相同或者相近时,固定预定值的大小。也可以由大到小调整预定值的大小,并在接收环境信号的幅度值相同或者相近时,固定预定值的大小。如果需要由小到大调整预定值,则需要将预定值的初始值设置的稍微小一点,逐次调大后的最终值可以是规定的高脉冲信号的最低幅度值,或者更大的值;如果需要由大到小调整预定值,将需要将预定值的初始值设置的稍微大一点,且预定值的初始值的最小值需要大于或等于规定的高脉冲信号的最低幅度值。In step S150, if the detected amplitude values of the environmental signals are not the same or similar, the magnitude of the predetermined value is adjusted, and the process proceeds to step S130 until the detected amplitude values of the environmental signals are the same or similar.The predetermined value may be variably adjusted. 2 The size of the predetermined value may be adjusted from small to large, and the predetermined value may be fixed when the amplitude values of the received environment signals are the same or similar. It is also possible to adjust the magnitude of the predetermined value from large to small, and fix the predetermined value when the amplitude values of the received environment signals are the same or similar. If it is necessary to adjust the predetermined value from small to large, it is necessary to set the initial value of the predetermined value to be slightly smaller, and the final value after successively increasing may be the lowest amplitude value of the specified high pulse signal, or a larger value; It is necessary to adjust the predetermined value from large to small, and it is necessary to set the initial value of the predetermined value slightly larger, and the minimum value of the initial value of the predetermined value needs to be greater than or equal to the lowest amplitude value of the prescribed high pulse signal.
以上边界线的脉冲信号识别方法,脉冲信号为高低脉冲相间的脉冲波,高低脉冲的组合可有效缩短两个边界线的距离,具体可使两个边界线之间的距离缩短至1米以内,有效地提升了客户的体验。The pulse signal identification method of the above boundary line, the pulse signal is a high-low pulse phase pulse wave, and the combination of high and low pulses can effectively shorten the distance between the two boundary lines, and specifically shorten the distance between the two boundary lines to within 1 meter. Effectively enhance the customer experience.
如图7所示,另一实施例的边界线的脉冲信号识别方法包括步骤S120至步骤S1110至步骤S1150。As shown in FIG. 7, the pulse signal identifying method of the boundary line of another embodiment includes steps S120 to S1110 to step S1150.
步骤S1110,接收环境信号。环境信号包括智能割草机在边界线内工作时接收到的边界线上的脉冲信号,也包括外部的各种信号,如交流电线信号、其他公司的智能割草机边界线信号、宠物狗的电子围栏等。如图3所示,边界线上的脉冲信号可以是由一个高脉冲信号开始的连续信号,或者如图4所示,脉冲信号也可以是由一个低脉冲信号开始的连续信号。Step S1110, receiving an environmental signal. The environmental signal includes the pulse signal on the boundary line received by the intelligent mower when working in the boundary line, and also includes various external signals, such as AC wire signals, other company's intelligent lawn mower boundary line signals, and pet dogs. Electronic fences, etc. As shown in FIG. 3, the pulse signal on the boundary line may be a continuous signal starting from a high pulse signal, or as shown in FIG. 4, the pulse signal may also be a continuous signal starting from a low pulse signal.
步骤S1120,对环境信号进行倍数放大。通常环境信号的强度较低,不利于检测边界信信号,因此,需要对边界线信号进行放大。In step S1120, the ambient signal is multiplied. Usually the intensity of the ambient signal is low, which is not conducive to detecting the boundary signal. Therefore, the boundary line signal needs to be amplified.
步骤S1130,接收幅度值大于或等于预定值的环境信号。将环境信号的幅度值与预定值进行对比,可以将非边界信号过滤掉。割草机在边界线内工作时,边界线产生的信号通常是强度最强的,因此,通过预定值的设置可以检测到边界信号。Step S1130, receiving an environmental signal whose amplitude value is greater than or equal to a predetermined value. The non-boundary signal can be filtered out by comparing the amplitude value of the ambient signal with a predetermined value. When the mower works in the boundary line, the signal generated by the boundary line is usually the strongest, so the boundary signal can be detected by the setting of the predetermined value.
步骤S1140,检测接收到的环境信号的幅度值是否相同或者相近。最终接收到的环境信号的幅度值可以是相同的,也可以保持在某个浮动区间,只要整体上环境信号的幅度值均大于设置的脉冲信号的最低幅度值,则说明干扰信号均被过滤掉。Step S1140: Detect whether the amplitude values of the received environmental signals are the same or similar. The amplitude value of the finally received environmental signal may be the same or may be maintained in a certain floating interval. As long as the amplitude value of the environmental signal is greater than the lowest amplitude value of the set pulse signal, the interference signal is filtered out. .
步骤S1150,若检测到的环境信号的幅度值不是相同或者相近,则调整放大的倍数和预定值的大小,并进入步骤S1120,直到检测到的环境信号的幅度值相同或者相近。具体设置倍数和预定值时,若在当前预定值下未接收到环境信号,说明放大后的信号强度还不够高,可以由小到大调整倍数,进一步对环境信号进行放大,若在当前预定值下接收到环境信号,说明环境信号放大的倍数已经足够大,此时如果接收的环境信号的幅度值不相等或者相近,说明预定值较小,此时可以由小到大调整预定值的大小。Step S1150: If the detected amplitude values of the environmental signals are not the same or similar, adjust the amplification multiple and the predetermined value, and proceed to step S1120 until the detected environmental signals have the same or similar amplitude values. When the multiple and the predetermined value are specifically set, if the environmental signal is not received under the current predetermined value, it indicates that the amplified signal strength is not high enough, and the adjustment signal may be adjusted from small to large to further enlarge the environmental signal, if the current predetermined value The environment signal is received, indicating that the multiple of the ambient signal amplification is sufficiently large. If the amplitude values of the received environmental signals are not equal or similar, the predetermined value is small, and the predetermined value may be adjusted from small to large.
以上边界线的脉冲信号识别方法,脉冲信号为高低脉冲相间的脉冲波,高低脉冲的组合可有效缩短两个边界线的距离,具体可使两个边界线之间的距离缩短至1米以内,有效地提升了客户的体验。The pulse signal identification method of the above boundary line, the pulse signal is a high-low pulse phase pulse wave, and the combination of high and low pulses can effectively shorten the distance between the two boundary lines, and specifically shorten the distance between the two boundary lines to within 1 meter. Effectively enhance the customer experience.
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。The technical features of the above embodiments may be arbitrarily combined. For the sake of brevity of description, all possible combinations of the technical features in the above embodiments are not described. However, as long as there is no contradiction in the combination of these technical features, It is considered to be the range described in this specification.
以上实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。The above embodiments are merely illustrative of several embodiments of the present invention, and the description thereof is more specific and detailed, but is not to be construed as limiting the scope of the invention. It should be noted that a number of variations and modifications may be made by those skilled in the art without departing from the spirit and scope of the invention. Therefore, the scope of the invention should be determined by the appended claims.
Claims (15)
Translated fromChineseApplications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201510256205 | 2015-05-19 | ||
| CN201510256205.0 | 2015-05-19 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016184398A1true WO2016184398A1 (en) | 2016-11-24 |
Family
ID=57319430
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/CN2016/082635CeasedWO2016184398A1 (en) | 2015-05-19 | 2016-05-19 | Boundary line pulse signal identification system and method, and intelligent mowing system |
Country Status (2)
| Country | Link |
|---|---|
| CN (1) | CN106168484B (en) |
| WO (1) | WO2016184398A1 (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11003192B2 (en) | 2015-11-10 | 2021-05-11 | Positec Power Tools (Suzhou) Co., Ltd. | Automatic working system and control method thereof and automatic moving device |
| US12296694B2 (en) | 2021-03-10 | 2025-05-13 | Techtronic Cordless Gp | Lawnmowers |
| US12369509B2 (en) | 2022-07-19 | 2025-07-29 | Techtronic Cordless Gp | Display for controlling robotic tool |
| US12425197B2 (en) | 2022-07-29 | 2025-09-23 | Techtronic Cordless Gp | Generation of a cryptography key for a robotic garden tool |
| US12443180B2 (en) | 2022-11-09 | 2025-10-14 | Techtronic Cordless Gp | Robotic lawn mowers |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018000922A1 (en) | 2016-06-30 | 2018-01-04 | Tti (Macao Commercial Offshore) Limited | An autonomous lawn mower and a system for navigating thereof |
| US11172608B2 (en) | 2016-06-30 | 2021-11-16 | Tti (Macao Commercial Offshore) Limited | Autonomous lawn mower and a system for navigating thereof |
| CN108227692A (en) | 2016-12-09 | 2018-06-29 | 苏州宝时得电动工具有限公司 | Automatic mobile device, automatic working system and its control method |
| WO2018103178A1 (en)* | 2016-12-09 | 2018-06-14 | 苏州宝时得电动工具有限公司 | Automatic mobile device, automatic work system and control method thereof |
| CN109247117B (en)* | 2017-07-14 | 2021-02-09 | 苏州宝时得电动工具有限公司 | Method and device for automatically detecting boundary line breakage and intelligent mower |
| CN109386481B (en)* | 2017-08-02 | 2024-03-15 | 苏州宝时得电动工具有限公司 | Blowing device |
| CN107728217A (en)* | 2017-09-09 | 2018-02-23 | 浙江亚特电器有限公司 | Detect circuit and method in zone boundary for intelligent grass-removing |
| CN108415433B (en)* | 2018-03-22 | 2021-12-07 | 杭州苏珀曼智能科技有限公司 | Line crossing recognition method and line crossing prevention control system thereof |
| CN111179568B (en)* | 2019-12-25 | 2021-08-10 | 中电海康集团有限公司 | Mowing robot communication method and system based on boundary electromagnetic signals |
| CN113552873B (en)* | 2020-04-03 | 2024-03-26 | 南京泉峰科技有限公司 | Intelligent mowing system |
| CN113852364B (en)* | 2020-06-28 | 2025-06-06 | 莱克电气绿能科技(苏州)有限公司 | Boundary signal generation and detection method, generation system and lawn mowing robot |
| CN114679949B (en)* | 2020-12-30 | 2024-03-15 | 南京泉峰科技有限公司 | Self-driven equipment system and charging station |
| CN114264836B (en)* | 2021-12-22 | 2024-05-17 | 南京苏美达智能技术有限公司 | Method for detecting rotating speed of brush motor and automatic walking equipment |
| CN115016489A (en)* | 2022-06-22 | 2022-09-06 | 南京苏美达智能技术有限公司 | Self-walking equipment boundary signal interaction method and system |
| CN115469589A (en)* | 2022-10-13 | 2022-12-13 | 浙江白马科技有限公司 | Signal control circuit and method, signal generation device, docking station, autonomous operating system, and storage medium |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102187289A (en)* | 2008-10-20 | 2011-09-14 | 罗伯特·博世有限公司 | Method and system for recognizing the working range of a mobile tool |
| CN202383462U (en)* | 2011-12-29 | 2012-08-15 | 宁波舜韵电子有限公司 | Electronic fence system for defining working range of automatic mower |
| CN103197672A (en)* | 2012-01-05 | 2013-07-10 | 苏州宝时得电动工具有限公司 | Boundary signal identification method and boundary system thereof |
| CN103543745A (en)* | 2012-07-16 | 2014-01-29 | 苏州宝时得电动工具有限公司 | Guide system and control method thereof |
| CN103948353A (en)* | 2009-06-19 | 2014-07-30 | 三星电子株式会社 | Docking station for robot cleaner and method for emitting docking guide signals to robot cleaner |
| WO2015115949A1 (en)* | 2014-01-30 | 2015-08-06 | Husqvarna Ab | Robotic working tool system with a boundary wire |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3876068B1 (en)* | 2011-04-28 | 2024-10-09 | Positec Power Tools (Suzhou) Co., Ltd | Automatic working system, automatic walking device and steering method thereof |
| CN102889850A (en)* | 2011-07-18 | 2013-01-23 | 上海热流环境科技有限公司 | Boundary identification method for mowing robot |
| US9043070B2 (en)* | 2012-08-22 | 2015-05-26 | Industrial Technology Research Institute | Moving device and moving control method thereof |
| TWI443346B (en)* | 2012-09-14 | 2014-07-01 | Chunghwa Telecom Co Ltd | Electrical appliance identification system and method |
| CN103809591B (en)* | 2012-11-09 | 2017-06-27 | 苏州宝时得电动工具有限公司 | Automatic working system |
| CN103809592A (en)* | 2012-11-09 | 2014-05-21 | 苏州宝时得电动工具有限公司 | Automatic working system and control method thereof |
- 2016
- 2016-05-19WOPCT/CN2016/082635patent/WO2016184398A1/ennot_activeCeased
- 2016-05-19CNCN201610334140.1Apatent/CN106168484B/enactiveActive
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102187289A (en)* | 2008-10-20 | 2011-09-14 | 罗伯特·博世有限公司 | Method and system for recognizing the working range of a mobile tool |
| CN103948353A (en)* | 2009-06-19 | 2014-07-30 | 三星电子株式会社 | Docking station for robot cleaner and method for emitting docking guide signals to robot cleaner |
| CN202383462U (en)* | 2011-12-29 | 2012-08-15 | 宁波舜韵电子有限公司 | Electronic fence system for defining working range of automatic mower |
| CN103197672A (en)* | 2012-01-05 | 2013-07-10 | 苏州宝时得电动工具有限公司 | Boundary signal identification method and boundary system thereof |
| CN103543745A (en)* | 2012-07-16 | 2014-01-29 | 苏州宝时得电动工具有限公司 | Guide system and control method thereof |
| WO2015115949A1 (en)* | 2014-01-30 | 2015-08-06 | Husqvarna Ab | Robotic working tool system with a boundary wire |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11003192B2 (en) | 2015-11-10 | 2021-05-11 | Positec Power Tools (Suzhou) Co., Ltd. | Automatic working system and control method thereof and automatic moving device |
| US12296694B2 (en) | 2021-03-10 | 2025-05-13 | Techtronic Cordless Gp | Lawnmowers |
| US12369509B2 (en) | 2022-07-19 | 2025-07-29 | Techtronic Cordless Gp | Display for controlling robotic tool |
| US12425197B2 (en) | 2022-07-29 | 2025-09-23 | Techtronic Cordless Gp | Generation of a cryptography key for a robotic garden tool |
| US12443180B2 (en) | 2022-11-09 | 2025-10-14 | Techtronic Cordless Gp | Robotic lawn mowers |
Also Published As
| Publication number | Publication date |
|---|---|
| CN106168484B (en) | 2020-12-11 |
| CN106168484A (en) | 2016-11-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2016184398A1 (en) | Boundary line pulse signal identification system and method, and intelligent mowing system | |
| CN111179568B (en) | Mowing robot communication method and system based on boundary electromagnetic signals | |
| CN107003676B (en) | Method for identifying a working area of an autonomous working apparatus and working apparatus | |
| EP3167355B1 (en) | 3d gesture recognition | |
| US9875635B2 (en) | Proximity detection system | |
| CN120595785A (en) | Self-contained equipment, automatic working system and control method thereof | |
| CN105467983B (en) | Automatic running device guidance system and method | |
| US11003192B2 (en) | Automatic working system and control method thereof and automatic moving device | |
| CN102890505B (en) | Boundary system | |
| KR102191426B1 (en) | Mowing Robot's Mowing Boundary Area and Weed Length Recognition Apparatus and the Method | |
| US20200278691A1 (en) | Self-moving device and working system, identification method, and working method thereof | |
| CN110347144B (en) | Self-mobile device, self-learning method thereof and readable storage medium | |
| WO2017101882A1 (en) | Auto-movement robot system | |
| CN103543745A (en) | Guide system and control method thereof | |
| CN107085380A (en) | A smart home system user position judgment method and electronic equipment | |
| CN108536136B (en) | Automatic walking equipment and boundary distance detection method, device and system | |
| JP2009535006A (en) | Processing method and apparatus for energy saving of active infrared type inductive device powered by dry cell | |
| CN106291739B (en) | A kind of correlation photoelectric sensor and its anti-interference method | |
| CN108733041A (en) | Automatic mobile device and its ultrasonic barrier-avoiding method | |
| CN108431715A (en) | Automatic identification objects in front from mobile device and its recognition methods | |
| CN106909140A (en) | Route homing method and system | |
| CN111358359B (en) | Line avoiding method and device for robot, chip and sweeping robot | |
| CN217278645U (en) | Detection circuit, device, system and robot | |
| WO2025067562A1 (en) | Control method and apparatus for smart mower, and storage medium and smart mower | |
| CN104515535A (en) | Groove-type grating sensor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application | Ref document number:16795885 Country of ref document:EP Kind code of ref document:A1 | |
| NENP | Non-entry into the national phase | Ref country code:DE | |
| 122 | Ep: pct application non-entry in european phase | Ref document number:16795885 Country of ref document:EP Kind code of ref document:A1 |