US9364955B2 - Stabilizing apparatus for highly articulated probes with link arrangement, methods of formation thereof, and methods of use thereof - Google Patents
Stabilizing apparatus for highly articulated probes with link arrangement, methods of formation thereof, and methods of use thereofDownload PDFInfo
- Publication number
- US9364955B2 US9364955B2US14/364,195US201214364195AUS9364955B2US 9364955 B2US9364955 B2US 9364955B2US 201214364195 AUS201214364195 AUS 201214364195AUS 9364955 B2US9364955 B2US 9364955B2
- Authority
- US
- United States
- Prior art keywords
- force
- probe
- constructed
- elongate
- transfer mechanism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 239000000523sampleSubstances0.000titleclaimsabstractdescription205
- 230000000087stabilizing effectEffects0.000titleclaimsabstractdescription54
- 238000000034methodMethods0.000titledescription14
- 230000015572biosynthetic processEffects0.000title1
- 230000007246mechanismEffects0.000claimsabstractdescription87
- 238000012546transferMethods0.000claimsabstractdescription72
- 230000033001locomotionEffects0.000claimsabstractdescription59
- 230000007704transitionEffects0.000claimsabstractdescription26
- 238000009826distributionMethods0.000claimsdescription13
- 239000004033plasticSubstances0.000claimsdescription12
- 239000002184metalSubstances0.000claimsdescription10
- 230000006835compressionEffects0.000claimsdescription6
- 238000007906compressionMethods0.000claimsdescription6
- 230000008878couplingEffects0.000claims2
- 238000010168coupling processMethods0.000claims2
- 238000005859coupling reactionMethods0.000claims2
- 230000006641stabilisationEffects0.000description9
- 238000011105stabilizationMethods0.000description9
- 238000005452bendingMethods0.000description7
- 238000007689inspectionMethods0.000description5
- 239000007787solidSubstances0.000description5
- 230000008901benefitEffects0.000description4
- 238000013461designMethods0.000description4
- 239000004809TeflonSubstances0.000description3
- 229920006362Teflon®Polymers0.000description3
- 238000002955isolationMethods0.000description3
- 230000013011matingEffects0.000description3
- 230000008439repair processEffects0.000description3
- 125000006850spacer groupChemical group0.000description3
- 230000005540biological transmissionEffects0.000description2
- 239000000463materialSubstances0.000description2
- 238000011084recoveryMethods0.000description2
- 238000001356surgical procedureMethods0.000description2
- 241000193738Bacillus anthracisSpecies0.000description1
- 230000003213activating effectEffects0.000description1
- 230000002411adverseEffects0.000description1
- 210000003484anatomyAnatomy0.000description1
- 238000013459approachMethods0.000description1
- 230000000712assemblyEffects0.000description1
- 238000000429assemblyMethods0.000description1
- 239000012472biological sampleSubstances0.000description1
- 238000001574biopsyMethods0.000description1
- 238000010276constructionMethods0.000description1
- 238000005520cutting processMethods0.000description1
- 230000001419dependent effectEffects0.000description1
- 238000002405diagnostic procedureMethods0.000description1
- 238000006073displacement reactionMethods0.000description1
- 230000009977dual effectEffects0.000description1
- 239000000835fiberSubstances0.000description1
- 238000007667floatingMethods0.000description1
- 230000005484gravityEffects0.000description1
- 239000002920hazardous wasteSubstances0.000description1
- 230000017525heat dissipationEffects0.000description1
- 238000002347injectionMethods0.000description1
- 239000007924injectionSubstances0.000description1
- 238000003780insertionMethods0.000description1
- 230000037431insertionEffects0.000description1
- 230000002452interceptive effectEffects0.000description1
- 238000004519manufacturing processMethods0.000description1
- 230000009347mechanical transmissionEffects0.000description1
- 239000013307optical fiberSubstances0.000description1
- 239000002990reinforced plasticSubstances0.000description1
- 230000003014reinforcing effectEffects0.000description1
- 238000005067remediationMethods0.000description1
- 238000009877renderingMethods0.000description1
- 238000009420retrofittingMethods0.000description1
- 238000005728strengtheningMethods0.000description1
- 238000002560therapeutic procedureMethods0.000description1
- 231100000331toxicToxicity0.000description1
- 230000002588toxic effectEffects0.000description1
- 239000011800void materialSubstances0.000description1
Images





















Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
- B25J18/06—Arms flexible
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/06—Programme-controlled manipulators characterised by multi-articulated arms
- B25J9/065—Snake robots
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/19—Drive system for arm
- Y10S901/21—Flaccid drive element
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20207—Multiple controlling elements for single controlled element
- Y10T74/20305—Robotic arm
- Y10T74/20323—Robotic arm including flaccid drive element
Definitions
- Embodiments of the present inventive conceptsrelate generally to the field of robotics and, more particularly, to three-dimensional, flexible, steerable robotic devices, and methods of forming and controlling the same.
- Such articulating probescan be subject to significant forces in order to control or lock the linking mechanism, and subject the probe to undesired movements and adversely affect the performance of the articulating probe.
- Embodiments of the present inventive conceptsmay be directed to articulating robotic systems, robotic system user interfaces, human interface devices for controlling robotic systems and methods of controlling robotic systems.
- an apparatus for driving an articulating probeincluding at least one elongate probe constructed and arranged to articulate in at least one predetermined degree of motion and to transition from a flexible state to a rigid state, a force transfer mechanism constructed and arranged to apply a force to the at least one elongate probe.
- the forceis selected from the group consisting of a force that causes the at least one elongate probe to articulate in the at least one predetermined degree of motion and a force that causes the at least one elongate probe to transition from the flexible state to the rigid state.
- the base structureis attached to at least a portion of the force transfer mechanism and the at least one elongate probe; the base structure including one or more stabilizing elements constructed and arranged to resist undesired movement of the at least one elongate probe caused by force from the force transfer mechanism.
- the at least one of the stabilizing elementsis constructed and arranged to resist twisting of the base structure.
- the at least one of the stabilizing elementsis constructed and arranged to resist flexing of the base structure.
- the at least one of the stabilizing elementsis constructed and arranged to resist compression of the base structure.
- the at least one of the stabilizing elementsis constructed and arranged to resist stretching of the base structure.
- At least one of the stabilizing elementsis constructed and arranged to resist lengthening of the base structure.
- the base structureincludes a housing and wherein at least one of the stabilizing elements includes a rib connected to the housing.
- the base structureincludes a housing including a first portion and a thicker second portion and wherein the stabilizing element includes the thicker second portion.
- the one or more stabilizing elementsincludes a force distribution plate.
- the base structureincludes a plastic housing and wherein the force distribution plate is a metal plate attached to the plastic housing.
- the force transfer mechanismincludes at least one cable and at least one bobbin, wherein applying a force to the at least one elongate probe includes rotating the at least one bobbin, and wherein the at least one bobbin is attached to and stabilized by the force distribution plate.
- the force transfer mechanismfurther includes at least two cables and at least two corresponding bobbins, wherein applying a force to the at least one elongate probe further includes rotating the at least two bobbins, and wherein the at least two bobbins are attached to the force distribution plate.
- the force transfer mechanismfurther includes at least three cables and at least three bobbins, wherein applying a force to the at least one elongate probe further includes rotating the at least three bobbins, and wherein the at least three bobbins is attached to the force distribution plate.
- the force transfer mechanismincludes at least one cable, at least one bobbin and at least one cart, wherein applying a force to the at least one elongate probe includes rotating the at least one bobbin, wherein the at least one cart is constructed and arranged to advance and retract the at least one elongate probe, and wherein the at least one bobbin and the at least one cart are attached to the force distribution plate.
- the force transfer mechanismincludes at least one gear, wherein advancing or retracting the at least one elongate probe includes rotating the at least one gear.
- the at least one gearincludes at least one lead screw for driving an at least one cart, wherein the at least one cart is movably mounted on the at least one lead screw.
- the base structureincludes a first portion operably attachable to a second portion, and wherein the at least one stabilizing element includes at least one projection extending from the first portion and at least one recess positioned in the second portion to receive the at least one projection.
- the at least one projectionincludes a tongue plate and the at least one recess includes a slot for receiving the tongue plate.
- the base structureincludes a first portion, a second portion, and the at least one stabilizing element includes a latching assembly for operably attaching the first portion to the second portion.
- the latching assemblyis spring-loaded.
- the apparatusfurther includes at least one cart attached to the at least one elongate probe, wherein the at least one cart includes a first cart that is constructed and arranged to advance and retract the elongate probe, and wherein the at least one stabilizing element includes an elongate guide fixture constructed and arranged to slidingly guide the first cart.
- the apparatusfurther includes a second elongate probe and a second cart attached to the second elongate probe, wherein the second cart is constructed and arranged to advance and retract the second elongate probe, and wherein the stabilizing element further includes a second guide fixture constructed and arranged to slidingly guide the second cart.
- the second guide fixtureis a rail. In an embodiment, the second guide fixture is a solid cylindrical metal rail. In an embodiment, the second guide fixture includes an elongate slot that receives and communicates with an at least one of a corresponding male fixture of at least one of the first and the second carts.
- the force that causes the at least one elongate probe to transition from the flexible state to the rigid stateincludes a force of at least 1 pound.
- the force that causes the at least one elongate probe to transition from the flexible state to the rigid stateincludes a force of at least 10 pounds.
- the force that causes the at least one elongate probe to transition from the flexible state to the rigid stateincludes a force of at least 20 pounds.
- the force that causes the at least one elongate probe to transition from the flexible state to the rigid stateincludes a force of approximately 30 pounds.
- the force transfer mechanismincludes at least one cable constructed and arranged to transmit a force that causes the at least one elongate probe to transition from the flexible state to the rigid state.
- the force transfer mechanismincludes at least two cables constructed and arranged to collectively transmit a force that causes the at least one elongate probe to transition from the flexible state to the rigid state.
- the at least two cablesare further constructed and arranged to transmit the articulating force to articulate the at least one elongate probe.
- the force transfer mechanismincludes at least three cables constructed and arranged to collectively transmit a force that causes the at least one elongate probe to transition from the flexible state to the rigid state.
- the at least three cablesare further constructed and arranged to transmit the articulating force to articulate the at least one elongate probe.
- the at least one elongate probeincludes a first probe arm and a second probe arm, the first probe arm enclosing the second probe arm, wherein the articulation mechanism is constructed and arranged to drive the first and second probe arms longitudinally with respect to each other and wherein the force transfer mechanism includes a locking mechanism to independently lock or release each of the first and second probe arms in states of flexibility and rigidity in the flexible state or the rigid state.
- the at least one elongate probeincludes a steerable distal end.
- the at least one predetermined degree of motionincludes three degrees of motion about which the steerable distal end can be steered.
- the base structureincludes a feeding structure through which the at least one elongate probe is fed from the base structure.
- the feeding structureincludes at least one slidable actuating carriage constructed and arranged to advance and retract the at least one elongate probe.
- the one or more stabilizing elementsinclude at least two rails on which the at least one slidable actuating carriage slides, the at least two rails constructed and arranged to substantially prevent movement of the at least one slideable actuating carriage and cables in directions other than predetermined motion along the longitudinal axis of the at least two rails.
- the at least two railsincludes two spaced apart and parallel rails constructed and arranged to substantially prevent twisting or bending of the base structure.
- the at least two railsare solid.
- the at least two railsare hollow.
- the at least one slideable actuating carriageincludes first and second slidable actuating carriages to respectively advance first and second probe arms of the articulating probe, the second probe arm slidable within the first probe arm.
- the first probeincludes a plurality of inner links and the second probe includes a plurality of outer links, wherein the inner and outer links articulate with respect to each other.
- the feeding structureincludes at least one elongate lead screw arranged to be rotated so as to drive actuation of the at least one slidable actuating carriage.
- the at least one elongate lead screwincludes two parallel and spaced apart lead screws arranged to substantially prevent twisting or bending of the base structure.
- the stabilizing elementsinclude at least one metal mounting plate to which the at least one elongate lead screw is mounted so as to minimize non-linear movement of the slidable carriages with respect to the feeding structure.
- the at least one slidable actuating carriageincludes Teflon-coated bushings arranged to substantially prevent movement of the actuating carriage in directions other than predetermined motion along the longitudinal axis of the at least one elongate lead screws.
- the force transfer mechanismincludes at least one gear connecting the feeding structure to drive the articulating probe and wherein the stabilizing elements include helical threads on the at least one gear to increase the connective area between the base structure and the feeding structure.
- the force transfer mechanismincludes at least two cables housed within the feeding structure and arranged to steer a distal end of the at least one elongate probe.
- the at least two cablesincludes three cables arranged to steer a distal end of the at least one elongate probe in three degrees of freedom.
- the at least two cablesare arranged to drive the locking mechanism.
- all of the force transfer mechanism located within the feeding structureincludes a sub-assembly constructed independently from the feeding structure.
- the feeding structureis secured to the sub-assembly so as to increase the rigidity of the sub-assembly during articulation of the at least one elongate probe.
- the force transfer mechanismincludes at least one rotatable bobbin housed within the feeding structure to drive articulation of the at least one probe arm.
- the at least one rotatable bobbindrives articulation of the at least two cables.
- the bobbinsare mounted to a mounting plate, the mounting plate further mounted to the sub-assembly.
- the sub-assemblyfurther includes the at least one slidable actuating carriage, the at least two rails, and the at least one elongate lead screw.
- the feeding structureis a detachable portion of the base structure, wherein an interface between the feeding structure and non-detachable portion of the base structure includes at least one alignment feature that aligns the feeding structure with the base structure.
- the alignment featuresinclude at least one protrusion of the interface to fixedly engage with at least one alignment slot of the interface.
- the at least one alignment featureincludes at least two slots of the interface to interface with at least two alignment pegs of the interface.
- the at least one protrusionincludes a vertically oriented alignment plate.
- the vertically oriented alignment plateextends across at least one half of a width of the feeding structure.
- the at least one alignment featureincludes two or more ball plungers arranged to engage with the vertically oriented alignment plate so as to further align the vertically oriented alignment plate within an at least one alignment slot and reduce motion of the alignment plate within the at least one alignment slot.
- the two or more ball plungersare arranged to prevent improper orientation of the alignment plate within the at least one alignment slot.
- the alignment plateincludes an alignment rib on a face of the alignment plate so as to reduce sliding of the alignment plate across the length of the alignment slot.
- the alignment plateincludes a tongue slot at the proximal end of the alignment plate, the tongue slot arranged to engage and interlock with an articulating tongue when the articulating tongue engages with the tongue slot, the articulating tongue attached to the non-detachable portion of the base structure.
- the interfaceincludes at least two protrusions and two slots arranged to interface with each other upon connecting the feeding structure with the non-detachable portion of the base structure, wherein a first protrusion and a second protrusion are horizontally separated from each other by at least a half of the horizontal maximum length of the support structure in order to substantially align the base unit and support structure and prevent a rotating yaw of the support structure.
- the interfaceincludes at least two protrusions and two slots arranged to interface with each other upon connecting the feeding structure to the base structure, wherein the first and second protrusions are located directly about two sides of a first electrical connector in the interface, the first and second protrusions arranged to mate with first and second slots in the interface, the first electrical connector arranged to mate with a second electrical connector located in the interface.
- first and second protrusionsare tapered to provide fine alignment of the first and second electrical connectors with each other.
- the interfaceincludes one or more horizontally oriented spring-loaded slots and one or more corresponding horizontally oriented pins arranged to engage the spring-loaded slots upon connecting the feeding structure to the base structure.
- a portion of the force transfer mechanism secured within the base structureis driven by at least one force-generating unit.
- the at least one force generating unitincludes a motor.
- the motorgenerates force through at least one of a solenoid, valve, cylinder, hydraulic, and pneumatic.
- the at least one force-generating unitis housed outside of the detachable feeding structure.
- the base structureincludes a base plate, the base plate including a stand connecting interface for mounting the base structure to a stand structure, wherein the stand connecting interface is integrated within the base plate of the base structure.
- the stand connecting interfaceis electrically isolated from the rest of the base unit.
- the stand connecting interfaceincludes at least one of plastic spacers, a key hole slotted plastic isolation plate, and insulated standoffs in order to electrically isolate the stand interface from the rest of the base unit.
- the at least one or more stabilizing elementsincludes one or more vertically oriented posts extending between the ground connecting interface and a chassis of the base structure.
- the vertically oriented postsare constructed of solid metal.
- the vertically oriented postsextend from a plate in the chassis.
- the base structureincludes a Faraday cage connecting a chassis of the base structure so as to prevent undesired electrical interference from external sources and emission to other electrical devices.
- the apparatusincludes an introducer conduit attached to the base structure, the introducer conduit arranged to guide the at least one probe arm along a predetermined path.
- the introducer conduitis fastened to a bearing block securing the at least one lead screw so as to align the introducer conduit with the at least one slidable carriage.
- the at least one force translating unitis arranged to translate at least about thirty pounds of force while the at least one or more stabilizing elements substantially limits motion of the at least one probe arm to the driven at least one predetermined degree of motion.
- the apparatusincludes at least one elongate probe arm constructed and arranged to articulate in at least one predetermined degree of motion, an articulation mechanism constructed and arranged to drive the articulation of the at least one probe arm in the at least one predetermined degree of motion, a base structure arranged to remain stationary with respect to the articulation mechanism of the at least one elongate probe arm and to fixedly secure at least a portion of the articulation mechanism, the base structure including a support structure extending the articulation mechanism from the base structure to the at least one elongate probe arm, the support structure arranged to substantially limit motion of the at least one probe arm to the driven at least one predetermined degree of motion, wherein the at least one probe arm includes a first probe arm and a second probe arm, the first probe arm enclosing the second probe arm, wherein the articulation mechanism is constructed and arranged to drive the first and second probe arms longitudinally with respect to each other, and wherein the articulation mechanism includes a locking mechanism to independently lock or release each of
- the probe armincludes a steerable distal end.
- the at least one degree of motionincludes three degrees of motion about which the steerable distal end can be steered.
- the at least one probe armincludes a proximate end and wherein the base structure includes a feeding conduit through which the at least one probe arm is fed from the base structure.
- the feeding conduitincludes at least one slidable actuating carriage arranged within the feeding conduit to advance and retract the at least one probe arm.
- the at least one actuating carriageincludes first and second slidable actuating carriages to advance first and second probe arms of the at least one probe arm, the second probe arm slidable within the first probe arm.
- the feeding conduitincludes at least two rails on which the at least one slidable actuating carriage slides, the at least two rails constructed and arranged to substantially prevent movement of the actuating carriage and cables in directions other than predetermined motion along the longitudinal axis of the rails.
- the at least two railsare parallel and spaced apart so as to substantially prevent twisting or bending of the base unit.
- the railsinclude slots arranged to guide sliding of the slidable carriages.
- the railsare cylindrical.
- the feeding conduitincludes at least one elongate lead screw arranged to be rotated so as to drive actuation of the at least one slidable actuating carriage.
- the at least one elongate lead screwsincludes two lead screws.
- the at least one elongate lead screwsis mounted to the feeding conduit with at least one metal plate so as to minimize non-linear movement of the slidable carriages with respect to the feeding conduit.
- the slidable actuating carriagesinclude Teflon-coated bushings arranged to engage the at least one elongate lead screws.
- the at least one lead screwsis supported by at least one bearing having a bearing block affixed to the feeding conduit so as to substantially prevent movement of the at least one elongated lead screw other than the rotation for driving actuation of the at least on slidable actuation carriage.
- the at least one bearingis a thrust bearing.
- the at least one elongated lead screwis supported by at least one spherical bearing so as to self align the lead screw with a bearing block securing the lead screw and substantially preventing movement of the at least one elongated lead screw other than the rotation for driving actuation of the at least on slidable actuation carriage.
- the at least one spherical bearingis located at the distal end of the lead screw and the thrust bearing is located at the proximal end of the lead screw.
- the articulation mechanismincludes at least one helical gear to drive the articulation mechanism and to increase the connective area between the support structure and the portion of the articulation mechanism fixedly secured to the base unit.
- the at least one helical geardrives actuation of the at least one elongate lead screw.
- the articulation mechanismincludes at least two cables housed within the feeding conduit and arranged to articulate the at least one probe arm.
- the articulation mechanismincludes at least two cables housed within the feeding conduit and arranged to steer a distal end of the at least one probe arm.
- the at least two cablesincludes three cables arranged to steer a distal end of the at least one probe arm in three degrees of motion.
- the at least two cablesare arranged to drive the locking mechanism.
- a portion of the articulation mechanism not secured within the base unitincludes a sub-assembly constructed independently from the feeding conduit.
- the feeding conduitis secured to the sub-assembly so as to increase the rigidity of the sub-assembly during articulation.
- the articulation mechanismincludes at least one rotatable bobbin housed within the feeding unit to drive articulation of the at least one probe arm.
- the at least one rotatable bobbindrives articulation of the at least two cables.
- the bobbinsare mounted to a mounting plate, the mounting plate further mounted to the sub-assembly.
- the sub-assemblyfurther includes the at least one slidable actuating carriage, the at least two rails, and the at least one elongate lead screw.
- the mounting plateincludes alignment features that align the mounting plate with the base unit.
- the alignment featuresincludes at least one slot constructed to fixedly engage with at least one protrusion of the base unit.
- the at least one protrusion of the base unitincludes two or more alignment pegs.
- the alignment featuresinclude at least one protrusion constructed to fixedly engage with at least one slot of the base unit.
- the at least one protrusionincludes an alignment plate substantially orthogonal to the mounting plate.
- the alignment plateextends across at least one half of a width of the mounting plate.
- the at least one alignment slotincludes ball plungers arranged to engage with the alignment plate so as to further align the alignment plate within the at least one alignment slot and reduce motion of the alignment plate within the at least one alignment slot.
- the ball plungersare arranged to prevent improper orientation of the alignment plate within the at least one alignment slot.
- the alignment plateincludes an alignment rib on a face of the alignment plate so as to reduce sliding of the alignment plate across the length of the alignment slot.
- the alignment plateincludes a tongue slot at the proximal end of the alignment plate, the tongue slot arranged to engage and interlock with an articulating tongue when the articulating tongue engages with the tongue slot, the articulating tongue attached to the base unit so as to substantially prevent a rotating pitch of the support structure.
- the portion of the articulation mechanismincludes at least one force-generating unit and wherein the support structure includes at least one force translating unit driven by the at least one force-generating unit.
- the at least one force generating unitincludes a motor.
- the motorgenerates force through at least one of a solenoid, valve, cylinder, hydraulic, and pneumatic.
- the at least one force translating unitis arranged to translate at least about thirty pounds of force while the support structure substantially limits motion of the at least one probe arm to the driven at least one predetermined degree of motion.
- the base structureincludes a feeding structure separable from the base structure and a mounting interface for connecting the base structure and feeding structure together.
- the mounting interfaceincludes at least two protrusions and two slots arranged to interface with each other upon connecting the base structure with the feeding structure, wherein a first protrusion and a second protrusion are horizontally separated from each other by at least a half of the horizontal maximum length of the feeding in order to substantially align the base structure and feeding structure and prevent a rotating yaw of the base structure.
- the first and second protrusionsare located about two sides of a first electrical connector in the mounting interface, the first and second protrusions arranged to mate with first and second slots in the mounting interface, the first electrical connector arranged to mate with a second electrical connector located in the mounting interface.
- first and second protrusionsare tapered to provide fine alignment of the first and second electrical connectors with each other.
- the mounting interfaceincludes one or more horizontally oriented spring-loaded slots and one or more corresponding horizontally oriented pins arranged to engage the spring-loaded slots upon connecting the base structure with the feeding structure.
- the base structureincludes a ground connecting interface for mounting the base structure to a ground-fixed structure.
- the ground connecting interfaceis integrated within a plate of the base unit. In an embodiment, the ground connecting interface is electrically isolated from the rest of the base unit.
- the ground connecting interfaceincludes at least one of plastic spacers, a key hole slotted plastic isolation plate, and insulated standoffs in order to electrically isolate the stand interface from the rest of the base unit.
- the support structureincludes one or more vertically oriented beams extending between the ground connecting interface and a chassis of the base structure. In an embodiment, the vertically oriented beams are constructed of solid metal.
- the vertically oriented beamsextend from a plate.
- the base structureincludes a Faraday cage connecting a chassis of the base structure with the ground connecting interface so as to prevent undesired electrical interference from external sources and emission to other electrical devices.
- the apparatusfurther including an introducer conduit attached to the base structure, the introducer conduit arranged to guide the at least one probe arm along a predetermined path.
- the introducer conduitis fastened to the at least one metal plate the at least one lead screw so as to align the introducer conduit with the at least one slidable carriage.
- a methodincludes providing at least one elongate probe constructed and arranged to articulate in at least one predetermined degree of motion and to transition from a flexible state to a rigid state, providing a force transfer mechanism constructed and arranged to apply a force to the at least one elongate probe, said force selected from the group consisting of a force constructed and arranged to cause the at least one elongate probe to articulate in the at least one predetermined degree of motion and a force constructed and arranged to cause the at least one elongate probe to transition from the flexible state to the rigid state.
- the methodfurther includes providing a base structure attached to at least a portion of the force transfer mechanism and the at least one elongate probe, the base structure including one or more stabilizing elements constructed and arranged to resist undesired movement of the elongate probe caused by force from the force transfer mechanism.
- the methodfurther includes articulating the at least one elongate probe with the force transfer mechanism by placing a first probe of the at least one elongate probe in a flexible state, articulating the first probe in a predetermined direction, placing the first probe in a state of rigidity, placing a second probe of the at least one elongate probe in a flexible state, and advancing the second probe in the predetermined direction relative to the first probe.
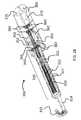
- FIG. 1Ais a perspective illustrative view of an articulating probe system according to an embodiment of inventive concepts.
- FIG. 1Bis a perspective illustrative view of an articulating probe arm according to an embodiment of inventive concepts.
- FIG. 1Cis a perspective illustrative view of probe tools which can be integrated with an articulating probe arm according to an embodiment of inventive concepts.
- FIG. 2Ais an exploded design schematic of a detachable feeder system for an articulating probe arm according to an embodiment of inventive concepts.
- FIG. 2Bis an illustrative internal view of a feeder system according to an embodiment of inventive concepts.
- FIG. 3Ais an illustrative perspective view of a force-transfer driving assembly of a feeder system according to an embodiment of inventive concepts.
- FIG. 3Bis a design schematic of a force-transfer driving subassembly of a feeder system according to an embodiment of inventive concepts.
- FIG. 3Cis an illustrative side-perspective view of a ninety-degree gear transfer subassembly of the force-transfer driving assembly of FIG. 3B .
- FIG. 3Dis another illustrative perspective view of a force-transfer driving assembly of FIG. 3B .
- FIG. 3Eis an illustrative perspective view of a bearing mounting block for a lead screw of the force-transfer driving assembly of FIGS. 3A-3B according to an embodiment of inventive concepts.
- FIG. 3Fis an illustrative perspective view of a bearing mounting block for a lead screw of the force-transfer driving assembly of FIGS. 3A-3B according to an embodiment of inventive concepts.
- FIG. 4Ais an illustrative internal perspective view of the feeder system of FIG. 2B according to an embodiment of inventive concepts.
- FIG. 4Bis an illustrative external perspective view of the feeder system of FIG. 4A according to an embodiment of inventive concepts.
- FIG. 4Cis an illustrative perspective view of an introducer assembly according to an embodiment of inventive concepts.
- FIG. 5Ais an illustrative top view of a stabilizing plate for a force-transfer driving assembly of a feeder system according to an embodiment of inventive concepts.
- FIG. 5Bis a perspective view of the stabilizing plate of FIG. 5A .
- FIG. 5Cis a perspective partial view of the stabilizing plate of FIG. 5A integrated within a feeder assembly according to an embodiment of inventive concepts.
- FIG. 5Dis an illustrative view of a bobbin and cable feeding mechanism arranged with the stabilization plate of FIG. 5A .
- FIG. 6is a top illustrative view of an elongate stabilizing plate integrated within a feeder assembly according to an embodiment of inventive concepts.
- FIG. 7Ais an illustrative perspective view of a base unit of a force-transfer driving assembly according to an embodiment of inventive concepts.
- FIG. 7Bis an illustrative partial perspective view of the base unit of FIG. 7A .
- FIG. 8is an illustrative cross-sectional view of a base unit of a force-transfer driving assembly according to an embodiment of inventive concepts.
- FIG. 9is a lower perspective view of a base unit of a force-transfer driving assembly according to an embodiment of inventive concepts.
- FIG. 10is an illustrative perspective view of a mounting plate for the base unit of a force-transfer driving assembly according to an embodiment of inventive concepts.
- FIGS. 11A-11Care graphic demonstrations of a highly articulated probe device, according to embodiments of the present inventive concepts.
- a flexible sheathsurrounds the spine and is axially slidably moveable relative to the spine so that the sheath will follow and conform to the shape of a spine in the rigid state and resist further flexure when the spine is in a relaxed state.
- a steerable distal tipis provided on the distal end of the device. Controls for the distal tip are mounted on the proximal end of the device. Mechanisms are provided on the distal end of the device for selectively activating and deactivating the stiffening means of the spine.
- An instrument conduitmay be mounted on the sheath.
- 11/630,279which is hereby incorporated by reference in its entirety, discloses a feeder mechanism for advancing and retracting both an inner core and an outer sleeve, as well as selectively applying tension to control cables used for steering and causing either the inner core or outer sleeve to transition between a rigid state and a limp state.
- FIGS. 11A-11Care graphic demonstrations of a highly articulated probe device, according to embodiments of the present inventive concepts.
- a highly articulated robotic probe 10according to the embodiment shown in FIGS. 11A-11C , comprises essentially two concentric mechanisms, an outer mechanism and an inner mechanism, each of which can be viewed as a steerable mechanism.
- FIGS. 11A-11Cshow the concept of how different embodiments of the probe 10 operate.
- the inner mechanismcan be referred to as a first mechanism, an inner core or inner core mechanism 12 .
- the outer mechanismcan be referred to as a second mechanism, an outer sleeve or outer sleeve mechanism 14 .
- Each mechanismcan alternate between being rigid and limp.
- the mechanismIn the rigid mode or state, the mechanism is just that—rigid. In the limp mode or state, the mechanism is highly flexible and thus either assumes the shape of its surroundings or can be re-shaped.
- the term “limp” as used hereindoes not necessarily denote a structure that passively assumes a particular configuration dependent upon gravity and the shape of its environment; rather, the “limp” structures described in this application are capable of assuming positions and configurations that are desired by the operator of the device, and therefore are articulated and controlled rather than flaccid and passive.
- one mechanismstarts limp and the other starts rigid.
- the outer sleeve 14is rigid and the inner core 12 is limp, as seen in step 1 in FIG. 11A .
- the inner core 12is both pushed forward by a feeding mechanism 16 , described below, and its “head” or distal end is steered, as seen in step 2 in FIG. 11A .
- the inner core 12is made rigid and the outer sleeve 14 is made limp.
- the outer sleeve 14is then pushed forward until it catches up or is coextensive with the inner core 12 , as seen in step 3 in FIG. 11A .
- the outer sleeve 14is made rigid, the inner core 12 limp, and the procedure then repeats.
- One variation of this approachis to have the outer sleeve 14 be steerable as well.
- the operation of such a deviceis illustrated in FIG. 11B .
- FIG. 11Bit is seen that each mechanism is capable of catching up to the other and then advancing one link beyond.
- the outer sleeve 14is steerable and the inner core 12 is not.
- the operation of such a deviceis shown in FIG. 11C .
- the operatorcan slide one or more tools through one or more working channels of outer sleeve 14 , inner core 12 , or one or more working channels formed between outer sleeve 14 and inner core 12 , such as to perform various diagnostic and/or therapeutic procedures.
- the channelis referred to as a working channel that can, for example, extend between first recesses formed in a system of outer links and second recesses formed in a system of inner links.
- Working channelsmay be included on the periphery of probe 10 , such as working channels comprising one or more radial projections extending from outer sleeve 14 , these projections including one or more holes sized to slidingly receive one or more tools.
- probe 10can be used in numerous applications including but not limited to: engine inspection, repair or retrofitting; tank inspection and repair; spying and surveillance applications; bomb disarming; inspection or repair in tightly confined spaces such as submarine compartments or nuclear weapons; structural inspections such as building inspections; hazardous waste remediation; biological sample recovery such as anthrax recovery; and combination of these.
- the device of the present disclosurehas a wide variety of applications and should not be taken as being limited to any particular application.
- Inner core 12 and/or outer sleeve 14are steerable and inner core 12 and outer sleeve 14 can each be made both rigid and limp, allowing probe 10 to drive anywhere in three-dimensions while being self-supporting. Probe 10 can “remember” each of its previous configurations and for this reason, probe 10 can retract from and/or retrace to anywhere in a three dimensional volume such as the intracavity spaces in the body of a patient such as a human patient.
- FIG. 1Ais a perspective illustrative view of an articulating probe system 100 according to an embodiment of inventive concepts.
- a patient table 110is integrated with an adjustable base stand 120 to which an articulating robot probe 175 is connected, typically through a rotatable, removable connection.
- the articulating robot probe 175includes probe arm 315 , typically a link assembly including a plurality of inner and outer links as described in reference to FIGS. 11A-11C .
- Robot probe 175is operably connected to a console system 150 configured for driving probe arm 315 , such connection typically including electrical wires or optical fibers for transmission of power and/or data, or mechanical transmission conduits such as mechanical linkages or pneumatic/hydraulic delivery tubes.
- the articulating robot probe 175includes a feeder assembly 300 that feeds an articulating robot probe arm such as is described above in reference to FIGS. 11A-11C .
- the feeder assembly 300is a detachable component that connects with a base unit 200 , such as base unit 200 described in reference to FIG. 7A .
- the feeder assembly 300 and the base unit 200are a unitary structure not designed to be readily detachable.
- various components of the systemsuch as, for example, the feeder assembly 300 is detachable and replaceable.
- FIG. 1Bis a perspective illustrative view of the distal end of articulating probe 175 according to an embodiment of inventive concepts.
- a probe arm 315such as a link assembly including a plurality of inner and outer links as described in reference to FIGS. 11A-11C , includes a distal end 115 with a plurality of working channels 117 .
- the working channelscan support a variety of tools including, for example, cameras, light sources, and surgical tools such as cutters, graspers, scissors, energy appliers, suturing assemblies, biopsy removal elements, etc. Tools may be slidingly received by the working channels 117 or they may be fixedly inserted in a working channel 117 , such as during a manufacturing process.
- FIG. 1Bis a perspective illustrative view of the distal end of articulating probe 175 according to an embodiment of inventive concepts.
- a probe arm 315such as a link assembly including a plurality of inner and outer links as described in reference to FIGS. 11A-11C ,
- Probe tools 125include an elongate conduit 127 which may be integrated with and extend through one of the working channels 117 , for example, working channels 117 located within or mounted to the periphery of probe arm 315 .
- probe tools 125include hand-operable controls 128 such as, for example, controls operably connected to one or more sharp surfaces positioned on the distal end of conduit 127 , such as for cutting tissue with a tool extending through working channel 117 .
- FIG. 2Ais an exploded design schematic of a detachable feeder system 300 for an articulating probe, such as articulating probe 175 of FIGS. 1A-1C , according to an embodiment of inventive concepts.
- FIG. 2Bis an illustrative internal view of a feeder system according to an embodiment of inventive concepts.
- the feeder system 300includes a housing 360 having a stabilization plate 370 , to which cable bobbins 380 are mounted.
- Housing 360is typically an injection molded, plastic housing, such as a reinforced plastic housing.
- the stabilization plate 370is mounted to housing 360 proximate reinforced housing ribs 362 .
- cables 382extend through a probe arm 315 comprising both inner and outer links (e.g., the links of inner core 12 and outer sleeve 14 of FIGS. 11A-11C ).
- the cables 382can be used to steer and/or releasably tighten to “lock”/stiffen either or both of the inner or outer links such as described above.
- one or more cables 382can be used to lock the links and two or more cables 382 can be used to steer the links.
- three cables 382can be designated for steering the links of outer sleeve 14 of FIGS. 11A-11C in three dimensions. These three cables 382 can also be used for locking the outer sleeve.
- the remaining cable(s) 382can be used for locking the links of inner core 12 .
- the forces appliedcan be distributed over cables 382 .
- three of the bobbins 380are configured to control the outer links, such as to steer, feed cable for probe arm 315 advancement, retract cable for probe arm 315 retraction, transition probe arm 315 from a limp to a rigid state (e.g. to lock), and to transition probe arm 315 from a rigid to a limp state (e.g. to become flexible).
- one bobbin 380is typically used to control the inner links, such as to feed cable for probe arm 315 advancement, retract cable for probe arm 315 retraction, transition probe arm 315 from a limp to a rigid state (e.g. to lock), and to transition probe arm 315 from a rigid to a limp state (e.g. to become flexible).
- the forces exerted by the bobbins 380can exceed 1, 10, 30 and/or 50 pounds, such as to lock the attached inner or outer links of probe arm 315 .
- collective forces exerted by the bobbinscan exceed 95 pounds, such as when 50 pounds is applied to lock the inner links (e.g.
- the amount of force appliedis related to the size (including diameter and length) of the links of the inner core 12 and outer sleeve 14 and also to the smoothness of the steering of the links. Greater force may be necessary to lock and stabilize a set of larger and/or longer links, including when the links are extended or retracted with respect to each other.
- a heel plate 375is fixedly attached to the stabilization plate 370 and can lockably engage with a base unit (e.g., base unit 200 shown and described with respect to FIG. 7A ).
- Latches 350are also attached to the housing 360 which are arranged to lockably engage with a base unit (e.g., base unit 200 shown and described with respect to FIG. 7A ).
- latches 350can articulate and are spring loaded, so as to rotate downward upon engaging latch prongs (such as prongs 245 of FIG. 7A ).
- the spring loaded latches 350provide up to about 20 pounds of tension.
- the heel plate 375 and latches 350interlock with a base unit (e.g., base unit 200 of FIG.
- the feeder system 300is configured to be detachable from a base unit, such as to be cleaned or replaced with another feeder system (e.g., where a robot probe arm is exposed to biological or toxic materials).
- the carriage drive segment 310is attached distally to a reinforced introducer 314 , further described below with reference to FIG. 4C , through which probe arm 315 extends and is used for guiding the probe arm's initial path through or toward a target area such as, for example, when introducer 314 comprises an outer surface similar to a body cavity shape found in a majority of patients.
- Probe arm 315may be configured to rapidly advance through introducer 314 , prior to fine motion control used after probe arm 315 exits introducer 314 .
- Feeder system 300includes a carriage drive segment 310 which is configured to independently drive two carriages 325 along two lead screws 322 .
- one carriage 325drives an outer set of links and one carriage 325 drives an inner set of links such as described, for example, with respect to FIGS. 11A-11C .
- the lead screws 322are driven by a ninety-degree gear assembly including gears 340 and 345 .
- gears 340 and 345include helical threads so as to increase overall contact between them and further stabilize force transfer between a base unit (e.g., base unit 200 of FIG. 7A ) and articulating probe arm 315 .
- gears 340engage rotary drives such as rotary drives 250 shown in FIG. 7A and further described below.
- Lead screws 322are secured within bearing mounting blocks 342 and 344 that are mounted to housing 360 .
- bearing mounting block 342includes thrust bearings 347 for further stabilizing the force transfer between gears 345 and lead screws 322 .
- carriages 325include grooves to slidably ride upon guide rails 327 , which aid in ensuring linear movement of carriages 325 and providing additional stabilization of the assembly 320 , feeder system 300 , and probe arm 315 , so as to resist undesired movement during force-transfer, such as undesired torquing or compression of feeder system 300 .
- Guide rails 327can further prevent undesired relative movement between the carriages, particularly when unequal forces are applied to them.
- rails 327are slidingly received and fixed within bearing blocks 344 and 342 in order to maintain substantially parallel configuration to maintain stability of the feeder system 300 .
- guide rails 327are configured to have square, rectangular, round, slotted, or other various cross sectional shapes configured to slidingly engage a receiving portion of carriages 325 .
- guide rails 327have a rectangular cross section configured to prevent undesired twisting along one or more axes of feeder system 300 (e.g. the major axis of feeder system 300 ).
- the dual screw and rail configurationhelps, in particular, to resist twisting and bending of the feeder system.
- subassembly 320is a separate subassembly that is secured into the housing 360 to minimize the deflection of the housing during force transfer, such as when housing 360 comprises a plastic, injection-molded housing.
- the carriages 325include reinforced bushings to engage with the lead screws and/or rails.
- the bushingsare coated with Teflon or a similarly lubricious material.
- FIG. 3Bis a design schematic of a force-transfer driving subassembly 320 of the feeder system 300 according to an embodiment of inventive concepts.
- FIG. 3Cis an illustrative side-perspective view of a ninety-degree gear transfer subassembly of the force-transfer driving assembly of FIG. 3B .
- FIG. 3Dis another illustrative perspective view of a force-transfer driving subassembly 320 of FIG. 3B , with one lead screw 322 and other components removed for illustrative clarity.
- the mounting block 344includes spherical bearings 343 to help ensure proper alignment between the lead screw 322 and the bearing mounting block 344 .
- FIG. 3Eis an illustrative perspective view of a bearing mounting block 344 for a lead screw of the force-transfer driving assembly of FIGS. 3A-3B according to an embodiment of inventive concepts.
- FIG. 3Fis an illustrative perspective view of a bearing mounting block 342 for a lead screw 322 of the force-transfer driving assembly 320 of FIG. 3A-3B .
- bearing mounting block 342includes thrust bearings 347 for further stabilizing the force transfer between gears 345 and lead screws 322 .
- FIG. 4Ais an illustrative internal perspective view of the feeder system 300 according to an embodiment of inventive concepts.
- System 300can comprise components similar to those described hereabove.
- a floating mounting block 390supports an electrical connector 392 and aids in electrically isolating connector 392 from a chassis of a base unit, for example base unit 200 of FIG. 7A .
- Alignment pins 395help ensure alignment of the electrical connector 392 and may also provide additional motion resistant stabilization.
- the alignment pins 395are tapered so as to improve insertion, alignment and motion resistance.
- Electrical and/or fiber optic connectionscan be used, for example, to provide power to and/or transmission signals to or from various components connected to the probe arm 315 including but not limited to one or more elements integrated into distal end 115 of probe arm 315 such as one or more elements selected from the group consisting of: a camera; a light such as an LED; an electrode such as an electrode configured to deliver radiofrequency energy; and combinations of these.
- a gripping and latch release handle 312permits an operator to releasably engage/connect the feeder system with a base unit.
- handle 312is configured to rotate latches 350 , such as to engage one or more pins of a base unit, such as pins 245 of base unit 200 of FIG. 7A .
- Probe arm 315typically includes one or more working channels, such as internal working channels 117 a and external, sideport working channels 117 b .
- Sideport working channels 117 bare connected to guide tubes 317 , configured to receive the distal portions of one or more elongate tools such as those described in reference to FIG. 1C .
- FIG. 4Bis an illustrative external perspective view of the feeder system 300 of FIG. 4A according to an embodiment of inventive concepts, including a housing cover 330 .
- Housing cover 330includes various openings, recesses, and slots for interfacing, securing, and/or stabilizing attachment of the feeder system 300 to a base unit (e.g., base unit 200 ).
- Receiving holes 336 , 332 and 334are configured to engage pins 205 , 270 , and 222 , respectively, of a base unit 200 such as shown in FIG. 7A and provide additional stability and resistance to movement between the feeder system 300 and base unit 200 .
- holes 336 , 332 and/or 334may be configured to allow pins 205 , 270 and/or 222 , respectively to pass therethrough, and engage with one or more other components of feeder system 300 , such as one or more stabilizing metal plates of feeder system 300 .
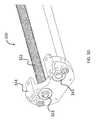
- FIG. 4Cis an illustrative perspective view of an introducer assembly 314 according to an embodiment of inventive concepts.
- Introducer assembly 314is mounted to mounting block 344 via mounting screws 318 and includes stabilization ribs 319 to prevent bending and twisting of the introducer assembly 314 and any probe arm and attached tools guided therethrough.
- Tool guides 317are rotatably connected to the distal end of introducer 314 at ball joint 316 b of collar 316 which, in embodiments, is reinforced to further stabilize the introducer assembly.
- FIG. 5Ais another illustrative top view of a stabilizing plate 370 for a force-transfer driving assembly of a feeder system 300 according to an embodiment of inventive concepts.
- FIG. 5Bis a perspective view of the stabilizing plate 370 of FIG. 5A .
- FIG. 5Cis a perspective partial view of the stabilizing plate of FIG. 5A integrated within a feeder assembly according to an embodiment of inventive concepts.
- FIG. 5Dis an illustrative view of a bobbin and cable feeding mechanism arranged with the stabilization plate 370 of FIG. 5A .
- the mounted heel plate 375includes aligning ribs 377 which improve alignment and motion resistance at the attachment of the feeder assembly 300 to a base unit, for example base unit 200 of FIG. 7A .
- the stabilizing plate 370includes a mating surface 372 that serves as an alignment guide, mating with a zero draft projection 373 of housing 360 when assembling the stabilization plate 370 with feeder system assembly 300 (as shown in FIG. 5C ) so as to allow precision fitting and minimal gap tolerances between the fitted parts, thereby minimizing undesired movement between the parts.
- Screws 376align, attach, and stabilize heel plate 375 with respect to stabilizing plate 370 .
- Recess 374engages an articulating latching tongue of a base unit, such as latching tongue 230 of Fig. base unit 200 of FIG. 7A .
- FIG. 6is a top illustrative view of an elongate stabilizing plate 370 ′ integrated within a feeder assembly 300 ′ according to an embodiment of inventive concepts.
- a single stabilizing mounting plate 370 ′mounts together with heel plate 375 , bobbins 380 , a force-transfer drive subassembly 320 , and probe arm 315 , such as to minimize twisting, compression and other undesired displacements.
- Probe arm 315comprises outer links 14 and inner links 12 , such as those described in reference to FIGS. 11A-11C .
- a unitary mounting plate 370 ′can provide additional resistance to bending or twisting of the feeder assembly 300 ′ and can simplify construction of the feeder assembly 300 ′.
- Stabilizing plate 370 ′is secured to housing 360 via mounting screws 371 .
- Feeder assembly 300 ′includes other components, such as those with the same reference numbers as are described above in reference to feeder assembly 300 .
- FIG. 7Ais an illustrative perspective view of a base unit 200 of an articulated robotic probe 175 (shown in FIG. 1A ) according to an embodiment of inventive concepts.
- FIG. 7Bis an illustrative partial perspective view of the base unit 200 of FIG. 7A .
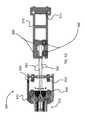
- FIG. 8is an illustrative cross-sectional view of a base unit 200 of an articulated robotic probe according to an embodiment of inventive concepts.
- Base unit 200can be arranged to maximize stability of the robotic probe arm 315 with respect to a patient operating table and serve to permit a feeder assembly 300 to be detachable and replaceable.
- Base unit 200comprises a handle, such as a handle 210 configured to allow an operator to carry, engage and/or position base unit 200 .
- a clamping tongue 230 and slot 232may engage the heel plate 375 of a feeder assembly (components of feeder assembly 300 described with respect to FIGS. 7A, 7B, and 8 have been previously described herein).
- clamping tongue 230is spring loaded with a spring, such as spring 238 of FIG. 8 , to exert a clamping force on the top of heel plate 375 during engagement.
- Slot 232also includes pressure loaded ball plungers 234 which increase the tightness of fit of heel plate 375 into slot 232 , further strengthening and stabilizing the connection between base unit 200 and feeder assembly 300 .
- Base unit 200includes motor driven wheels 220 which engage and drive bobbins 380 .
- Two motor driven wheels 250engage and drive gears 340 , which in turn drive gears 345 such as to rotate lead screws 320 and advance and retract carriages 325 of force-transfer driving subassembly 320 of the feeder system 300 .
- a bullet pin 270engages receiving hole 332 of feeder assembly 300 .
- this and other projectionsincluding alignment pins 205 , 222 , and 235 , mate with receiving holes, recesses, slots, and/or the surface of feeder assembly 300 to enhance alignment and motion resistance, including yaw between the base unit 200 and feeder assembly 300 , and/or any twisting and/or compression of feeder assembly 300 .
- numerous projectionssuch as described are incorporated into a housing 360 , which further stabilizes the interface between base unit 200 and feeder system 300 .
- a mating between alignment pins 395 of the feeder assembly 300 and receiving holes 292 of the base unit 200further aligns the connection between the male electrical connector 392 and a female connector 290 of the base unit, and also similarly aids in aligning and reinforcing motion resistance between the base unit 200 and feeder assembly 300 .
- other stabilizing platessuch as plates 274 and 272 of FIG. 8 , are incorporated within base unit 200 and are mounted and connected together, such as by vertically oriented support posts 275 of FIG. 8 .
- the posts 275pass through and/or between various stabilizing plates that reinforce their stability with respect to one another and the entire base unit.
- a lower stabilizing plate 274is connected with a base unit mounting plate 280 , further described below with respect to FIGS. 9-11 .
- Posts 275are secured within mounting fixtures 283 of mounting plate 280 to help secure and stabilize the mounting plate with respect to the base unit 200 .
- posts 275are constructed of solid metal.
- a faraday cage 277is mounted to mounting plate 280 , and helps block undesired electrical signals from interfering with operation of the robotic system.
- the faraday cage 277also provides additional rigidity to the base unit 200 so as to prevent undesired motion caused by robot-generated forces, such as forces exerted on one or more bobbins 380 by a cable attached to bobbin 380 and to a link of inner core 12 or a link of outer sleeve 14 of probe arm 315 .
- FIG. 9is a lower perspective view of a base unit 200 of an articulated robotic probe according to an embodiment of inventive concepts
- FIG. 10is an illustrative perspective view of mounting plate 280 for the base unit 200
- Base unit mounting plate 280includes a stand connecting interface 282 including a locking screw hole 284 , which can be used to securely attach base unit 200 to a stand such as, for example, stand 120 of FIG. 1A .
- the stand connecting interfacecan include spacers (e.g., made of plastic), a key hole slotted plastic isolation plate, and insulated standoffs in order to electrically isolate the stand connecting interface from the rest of the base unit.
- mounting plate 280includes heat dissipation elements 283 .
- the systems and methods of the present inventive conceptsprevent, mitigate, or otherwise restrict, undesired movement, including bending, torsional rotation, twisting and/or compression of a highly articulated robotic system and its components which support and provide force transfer through the robotic system.
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Robotics (AREA)
- Animal Behavior & Ethology (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
- Surgical Instruments (AREA)
- Transmission Devices (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Endoscopes (AREA)
- Accommodation For Nursing Or Treatment Tables (AREA)
Abstract
Description
Claims (29)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/364,195US9364955B2 (en) | 2011-12-21 | 2012-12-20 | Stabilizing apparatus for highly articulated probes with link arrangement, methods of formation thereof, and methods of use thereof |
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201161578582P | 2011-12-21 | 2011-12-21 | |
| US201261656600P | 2012-06-07 | 2012-06-07 | |
| US201261681340P | 2012-08-09 | 2012-08-09 | |
| PCT/US2012/070924WO2013096610A1 (en) | 2011-12-21 | 2012-12-20 | Stabilizing apparatus for highly articulated probes with link arrangement, methods of formation thereof, and methods of use thereof |
| US14/364,195US9364955B2 (en) | 2011-12-21 | 2012-12-20 | Stabilizing apparatus for highly articulated probes with link arrangement, methods of formation thereof, and methods of use thereof |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/US2012/070924A-371-Of-InternationalWO2013096610A1 (en) | 2011-12-21 | 2012-12-20 | Stabilizing apparatus for highly articulated probes with link arrangement, methods of formation thereof, and methods of use thereof |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US15/180,503ContinuationUS9821477B2 (en) | 2011-12-21 | 2016-06-13 | Stabilizing apparatus for highly articulated probes with link arrangement, methods of formation thereof, and methods of use thereof |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| US20140318299A1 US20140318299A1 (en) | 2014-10-30 |
| US9364955B2true US9364955B2 (en) | 2016-06-14 |
Family
ID=48669495
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US14/364,195Expired - Fee RelatedUS9364955B2 (en) | 2011-12-21 | 2012-12-20 | Stabilizing apparatus for highly articulated probes with link arrangement, methods of formation thereof, and methods of use thereof |
| US15/180,503Expired - Fee RelatedUS9821477B2 (en) | 2011-12-21 | 2016-06-13 | Stabilizing apparatus for highly articulated probes with link arrangement, methods of formation thereof, and methods of use thereof |
| US15/786,901AbandonedUS20180161992A1 (en) | 2011-12-21 | 2017-10-18 | Stabilizing apparatus for highly articulated probes with link arrangement, methods of formation thereof, and methods of use thereof |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US15/180,503Expired - Fee RelatedUS9821477B2 (en) | 2011-12-21 | 2016-06-13 | Stabilizing apparatus for highly articulated probes with link arrangement, methods of formation thereof, and methods of use thereof |
| US15/786,901AbandonedUS20180161992A1 (en) | 2011-12-21 | 2017-10-18 | Stabilizing apparatus for highly articulated probes with link arrangement, methods of formation thereof, and methods of use thereof |
Country Status (9)
| Country | Link |
|---|---|
| US (3) | US9364955B2 (en) |
| EP (1) | EP2793729B1 (en) |
| JP (2) | JP6449018B2 (en) |
| KR (1) | KR20140104502A (en) |
| CN (2) | CN104470455B (en) |
| AU (3) | AU2012358829B2 (en) |
| CA (1) | CA2858831A1 (en) |
| IL (1) | IL233136A0 (en) |
| WO (1) | WO2013096610A1 (en) |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10004568B2 (en) | 2013-12-30 | 2018-06-26 | Medrobotics Corporation | Articulating robotic probes |
| WO2019090288A1 (en) | 2017-11-06 | 2019-05-09 | Medrobotics Corporation | Robotic system wiht articulating probe and articulating camera |
| USD874655S1 (en)* | 2018-01-05 | 2020-02-04 | Medrobotics Corporation | Positioning arm for articulating robotic surgical system |
| US20200100846A1 (en)* | 2018-09-27 | 2020-04-02 | Eped, Inc. | Active-detection self-propelled artificial intelligence surgical navigation cart |
| US11122971B2 (en) | 2016-08-18 | 2021-09-21 | Neptune Medical Inc. | Device and method for enhanced visualization of the small intestine |
| US11135398B2 (en) | 2018-07-19 | 2021-10-05 | Neptune Medical Inc. | Dynamically rigidizing composite medical structures |
| US11219351B2 (en) | 2015-09-03 | 2022-01-11 | Neptune Medical Inc. | Device for endoscopic advancement through the small intestine |
| US11744443B2 (en) | 2020-03-30 | 2023-09-05 | Neptune Medical Inc. | Layered walls for rigidizing devices |
| US11793392B2 (en) | 2019-04-17 | 2023-10-24 | Neptune Medical Inc. | External working channels |
| US11937778B2 (en) | 2022-04-27 | 2024-03-26 | Neptune Medical Inc. | Apparatuses and methods for determining if an endoscope is contaminated |
| US12059128B2 (en) | 2018-05-31 | 2024-08-13 | Neptune Medical Inc. | Device and method for enhanced visualization of the small intestine |
| US12121677B2 (en) | 2021-01-29 | 2024-10-22 | Neptune Medical Inc. | Devices and methods to prevent inadvertent motion of dynamically rigidizing apparatuses |
| US12295550B2 (en) | 2017-07-20 | 2025-05-13 | Neptune Medical Inc. | Dynamically rigidizing overtube |
| US12329473B2 (en) | 2019-04-17 | 2025-06-17 | Neptune Medical Inc. | Dynamically rigidizing composite medical structures |
| US12330292B2 (en) | 2023-09-28 | 2025-06-17 | Neptune Medical Inc. | Telescoping robot |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3123922B1 (en)* | 2004-06-25 | 2019-11-27 | Carnegie Mellon University | Steerable, follow the leader device |
| WO2013096610A1 (en)* | 2011-12-21 | 2013-06-27 | Oyola Arnold E | Stabilizing apparatus for highly articulated probes with link arrangement, methods of formation thereof, and methods of use thereof |
| CN105246428B (en)* | 2013-01-11 | 2019-09-27 | 美的洛博迪克斯公司 | Radial type surgical instruments and its configuration method |
| US10864629B2 (en)* | 2013-03-15 | 2020-12-15 | Corindus, Inc. | System and method for controlling a position of an articulated robotic arm |
| CN105792767B (en) | 2013-10-07 | 2019-09-10 | 泰克尼恩研究和发展基金有限公司 | The clamper of needle insertion for robot graphics' guidance |
| KR20160090344A (en) | 2013-11-27 | 2016-07-29 | 메드로보틱스 코포레이션 | Oral retraction devices and methods |
| CA2946324C (en) | 2014-05-02 | 2023-03-21 | Intellimedical Technologies Pty Ltd | Elongate steerable devices for insertion into a subject's body |
| CA2966131A1 (en)* | 2014-06-05 | 2015-12-10 | Medrobotics Corporation | Articulating robotic probes, systems and methods incorporating the same, and methods for performing surgical procedures |
| JP2018512967A (en)* | 2015-04-20 | 2018-05-24 | メドロボティクス コーポレイション | Articulated robotic probe, system and method for incorporating a probe, and method for performing a surgical procedure |
| GB201506710D0 (en) | 2015-04-21 | 2015-06-03 | Cambridge Medical Robotics Ltd | Load cells in an instrument drive |
| US9580120B2 (en)* | 2015-05-29 | 2017-02-28 | The Boeing Company | Method and apparatus for moving a robotic vehicle |
| GB2543039A (en)* | 2015-10-02 | 2017-04-12 | Creo Medical Ltd | Electrosurgical device |
| WO2017142987A1 (en)* | 2016-02-19 | 2017-08-24 | Siemens Healthcare Diagnostics Inc. | Single-piece transfer arm structure for analytical instrumentation |
| CN109877832B (en)* | 2019-02-28 | 2022-05-10 | 广东工业大学 | A position determination method, system and related device |
| KR102349030B1 (en)* | 2019-08-29 | 2022-01-10 | 한국과학기술원 | Flexible drive manipulator |
| KR102499052B1 (en) | 2021-04-15 | 2023-02-13 | 주식회사 로엔서지컬 | Endoscopic surgery robot |
| CN113586033B (en)* | 2021-08-05 | 2023-09-26 | 思凡(上海)石油设备有限公司 | Gas detection device for logging |
| US11938633B2 (en)* | 2021-12-06 | 2024-03-26 | Fanuc Corporation | Autonomous robust assembly planning |
Citations (145)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3060972A (en) | 1957-08-22 | 1962-10-30 | Bausch & Lomb | Flexible tube structures |
| US3557780A (en) | 1967-04-20 | 1971-01-26 | Olympus Optical Co | Mechanism for controlling flexure of endoscope |
| US3572325A (en) | 1968-10-25 | 1971-03-23 | Us Health Education & Welfare | Flexible endoscope having fluid conduits and control |
| US3583393A (en) | 1967-12-26 | 1971-06-08 | Olympus Optical Co | Bendable tube assembly |
| US3625200A (en) | 1969-08-26 | 1971-12-07 | Us Catheter & Instr Corp | Controlled curvable tip member |
| US3638973A (en) | 1969-06-04 | 1972-02-01 | Charles Ellis Poletti | Joint means for use in work supporting arm |
| US3643653A (en) | 1968-12-24 | 1972-02-22 | Olympus Optical Co | Endoscopic apparatus |
| US3703968A (en) | 1971-09-20 | 1972-11-28 | Us Navy | Linear linkage manipulator arm |
| US3739770A (en) | 1970-10-09 | 1973-06-19 | Olympus Optical Co | Bendable tube of an endoscope |
| US3790002A (en) | 1971-10-11 | 1974-02-05 | Commissariat Energie Atomique | Manipulator with drive motors |
| US3892228A (en) | 1972-10-06 | 1975-07-01 | Olympus Optical Co | Apparatus for adjusting the flexing of the bending section of an endoscope |
| US3920972A (en) | 1974-07-16 | 1975-11-18 | Cincinnati Milacron Inc | Method and apparatus for programming a computer operated robot arm |
| US4078670A (en) | 1974-07-18 | 1978-03-14 | Commissariat A L'energie Atomique | Cable-operated power manipulator |
| US4108211A (en) | 1975-04-28 | 1978-08-22 | Fuji Photo Optical Co., Ltd. | Articulated, four-way bendable tube structure |
| US4150329A (en) | 1976-03-29 | 1979-04-17 | Asea Aktiebolag | Method and means in an industrial robot for the generation of a complex movement |
| US4221997A (en) | 1978-12-18 | 1980-09-09 | Western Electric Company, Incorporated | Articulated robot arm and method of moving same |
| US4260319A (en) | 1978-07-28 | 1981-04-07 | Motoda Denshi Kogyo Kabushiki Kaisha | End position control robot |
| US4259876A (en) | 1979-10-02 | 1981-04-07 | Belyanin Petr N | Mechanical arm |
| US4299533A (en) | 1978-06-06 | 1981-11-10 | Shiroyama Kogyo Kabushiki Kaisha | Jointed manipulator |
| US4351323A (en) | 1979-10-20 | 1982-09-28 | Kabushiki Kaisha Medos Kenkyusho | Curvable pipe assembly in endoscope |
| US4432349A (en) | 1979-04-03 | 1984-02-21 | Fuji Photo Optical Co., Ltd. | Articulated tube structure for use in an endoscope |
| US4445184A (en) | 1980-07-19 | 1984-04-24 | Shin Meiwa Industry Co., Ltd. | Articulated robot |
| US4474174A (en) | 1979-05-21 | 1984-10-02 | American Hospital Supply Corporation | Surgical instrument for an endoscope |
| US4475375A (en) | 1983-01-24 | 1984-10-09 | Hill Ernest W | Multi-flex tube bending mandrel |
| US4479914A (en) | 1982-11-01 | 1984-10-30 | Cashiers Plastics | Process and mold for molding foamed plastic articles |
| US4494417A (en) | 1979-03-16 | 1985-01-22 | Robotgruppen Hb | Flexible arm, particularly a robot arm |
| US4496278A (en) | 1982-04-07 | 1985-01-29 | Okamura Corporation | Industrial robot equipped with articulated arm unit |
| US4502830A (en) | 1980-09-30 | 1985-03-05 | Fujitsu Fanuc Limited | Industrial robot |
| US4517963A (en) | 1983-01-04 | 1985-05-21 | Harold Unger | Image-erecting barrel rotator for articulated optical arm |
| US4531885A (en) | 1981-10-05 | 1985-07-30 | Graco Robotics, Inc. | Device for robot manipulator |
| US4535207A (en) | 1982-06-24 | 1985-08-13 | Asea Aktiebolag | Safety device in an operating unit for an industrial robot |
| US4564179A (en) | 1984-04-12 | 1986-01-14 | Hollingsworth Ashley J | Articulated support arm apparatus |
| US4600355A (en) | 1984-08-29 | 1986-07-15 | Cybot, Inc. | Modular robotics system with basic interchangeable parts |
| US4655257A (en) | 1985-03-25 | 1987-04-07 | Kabushiki Kaisha Machida Seisakusho | Guide tube assembly for industrial endoscope |
| US4661032A (en) | 1984-12-20 | 1987-04-28 | Agency Of Industrial Science & Technology, Ministry Of International Trade & Industry | Bilateral master-slave manipulator control device |
| US4666366A (en) | 1983-02-14 | 1987-05-19 | Canon Kabushiki Kaisha | Articulated arm transfer device |
| US4700693A (en) | 1985-12-09 | 1987-10-20 | Welch Allyn, Inc. | Endoscope steering section |
| US4706001A (en) | 1984-07-04 | 1987-11-10 | Fanuc Ltd. | Industrial robot |
| US4726355A (en) | 1986-02-17 | 1988-02-23 | Olympus Optical Co., Ltd. | Curvable part device for endoscope devices |
| US4780045A (en) | 1987-11-09 | 1988-10-25 | Gmf Robotics Corporation | Robot with improved cable routing system |
| US4787369A (en) | 1987-08-14 | 1988-11-29 | Welch Allyn, Inc. | Force relieving, force limiting self-adjusting steering for borescope or endoscope |
| US4790294A (en) | 1987-07-28 | 1988-12-13 | Welch Allyn, Inc. | Ball-and-socket bead endoscope steering section |
| US4796607A (en) | 1987-07-28 | 1989-01-10 | Welch Allyn, Inc. | Endoscope steering section |
| US4804897A (en) | 1987-08-19 | 1989-02-14 | Hewlett-Packard Company | Orientation-dependant robot controller |
| US4805477A (en) | 1987-10-22 | 1989-02-21 | Gmf Robotics Corporation | Multiple joint robot part |
| US4806066A (en) | 1982-11-01 | 1989-02-21 | Microbot, Inc. | Robotic arm |
| US4830569A (en) | 1987-03-31 | 1989-05-16 | Asea Brown Boveri Ab | Industrial robot having a detachable electrical connection between housing on robot arm and tool holder |
| US4831547A (en) | 1985-06-06 | 1989-05-16 | Toyota Jidosha Kabushiki Kaisha | Multi-joint-robot controller for enabling detection of the spatial relationship between a robot and a rotary cable |
| US4838859A (en) | 1987-05-19 | 1989-06-13 | Steve Strassmann | Steerable catheter |
| US4863133A (en) | 1987-05-26 | 1989-09-05 | Leonard Medical | Arm device for adjustable positioning of a medical instrument or the like |
| US4864888A (en) | 1987-04-13 | 1989-09-12 | Mitsubishi Denki Kabushiki Kaisha | Robot articulation joint |
| US4873965A (en) | 1987-07-31 | 1989-10-17 | Guido Danieli | Flexible endoscope |
| US4888708A (en) | 1982-06-28 | 1989-12-19 | Asea Aktiebolag | Control system for an industrial robot |
| US4900218A (en) | 1983-04-07 | 1990-02-13 | Sutherland Ivan E | Robot arm structure |
| US4941457A (en) | 1989-08-17 | 1990-07-17 | Olympus Optical Co., Ltd. | Endoscope using an optical guide twisted on the tip side to have the visual field direction and curvature axis coincide with each other |
| US4943296A (en) | 1986-03-28 | 1990-07-24 | Life Technology Research Foundation | Robot for surgical operation |
| US4947827A (en) | 1988-12-30 | 1990-08-14 | Opielab, Inc. | Flexible endoscope |
| US4949927A (en) | 1989-10-17 | 1990-08-21 | John Madocks | Articulable column |
| US4950116A (en) | 1988-08-18 | 1990-08-21 | Kabushiki Kaisha Toshiba | Manipulator controlling apparatus |
| US4956790A (en) | 1987-02-06 | 1990-09-11 | Kabushiki Kaisha Toshiba | Instruction system of remote-control robot |
| US4979949A (en) | 1988-04-26 | 1990-12-25 | The Board Of Regents Of The University Of Washington | Robot-aided system for surgery |
| US4998916A (en) | 1989-01-09 | 1991-03-12 | Hammerslag Julius G | Steerable medical device |
| US5005558A (en) | 1988-05-16 | 1991-04-09 | Kabushiki Kaisha Toshiba | Endoscope |
| US5006035A (en) | 1985-04-27 | 1991-04-09 | Fanuc, Ltd. | Industrial robot |
| US5012169A (en) | 1988-07-20 | 1991-04-30 | Yokogawa Electric Corporation | Motor drive system |
| US5037391A (en) | 1989-01-09 | 1991-08-06 | Pilot Cardiovascular Systems, Inc. | Steerable angioplasty device |
| US5044063A (en) | 1990-11-02 | 1991-09-03 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Robotic tool change mechanism |
| US5046375A (en) | 1988-04-21 | 1991-09-10 | Massachusetts Institute Of Technology | Compact cable transmission with cable differential |
| US5064340A (en) | 1989-01-20 | 1991-11-12 | Genmark Automation | Precision arm mechanism |
| US5078140A (en) | 1986-05-08 | 1992-01-07 | Kwoh Yik S | Imaging device - aided robotic stereotaxis system |
| US5086401A (en) | 1990-05-11 | 1992-02-04 | International Business Machines Corporation | Image-directed robotic system for precise robotic surgery including redundant consistency checking |
| US5105819A (en) | 1988-09-01 | 1992-04-21 | Kon-Tron Elektronik AG | Ultrasound endoscope device |
| US5108368A (en) | 1990-01-04 | 1992-04-28 | Pilot Cardiovascular System, Inc. | Steerable medical device |
| US5143475A (en) | 1990-03-14 | 1992-09-01 | Kabushiki Kaisha Machida Seisakusho | Bending device |
| US5167221A (en) | 1990-03-14 | 1992-12-01 | Kabushiki Kaisha Machida Seisakusho | Bending device |
| US5174277A (en) | 1990-01-24 | 1992-12-29 | Kabushiki Kaisha Toshiba | Endoscope |
| US5176126A (en) | 1989-10-13 | 1993-01-05 | Kabushiki Kaisha Machida Seisakusho | Bending device |
| US5178129A (en) | 1989-12-28 | 1993-01-12 | Kabushiki Kaisha Machida Seisakusho | Method of producing bending device |
| US5180276A (en) | 1991-04-18 | 1993-01-19 | Brooks Automation, Inc. | Articulated arm transfer device |
| US5179935A (en) | 1990-05-17 | 1993-01-19 | Olympus Optical Co., Ltd. | Endoscope provided in the insertable section with a flexible part which can be made linear |
| US5193963A (en) | 1990-10-31 | 1993-03-16 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Force reflecting hand controller |
| US5195968A (en) | 1990-02-02 | 1993-03-23 | Ingemar Lundquist | Catheter steering mechanism |
| US5200679A (en) | 1990-02-22 | 1993-04-06 | Graham Douglas F | Artificial hand and digit therefor |
| US5201325A (en) | 1989-09-01 | 1993-04-13 | Andronic Devices Ltd. | Advanced surgical retractor |
| US5203380A (en) | 1989-10-13 | 1993-04-20 | Kabushiki Kaisha Machida Seisakusho | Bending device |
| US5203772A (en) | 1989-01-09 | 1993-04-20 | Pilot Cardiovascular Systems, Inc. | Steerable medical device |
| US5217003A (en) | 1991-03-18 | 1993-06-08 | Wilk Peter J | Automated surgical system and apparatus |
| US5217453A (en) | 1991-03-18 | 1993-06-08 | Wilk Peter J | Automated surgical system and apparatus |
| US5251611A (en) | 1991-05-07 | 1993-10-12 | Zehel Wendell E | Method and apparatus for conducting exploratory procedures |
| US5254088A (en) | 1990-02-02 | 1993-10-19 | Ep Technologies, Inc. | Catheter steering mechanism |
| US5257669A (en) | 1992-02-10 | 1993-11-02 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Climbing robot |
| US5266875A (en) | 1991-05-23 | 1993-11-30 | Massachusetts Institute Of Technology | Telerobotic system |
| US5271381A (en) | 1991-11-18 | 1993-12-21 | Vision Sciences, Inc. | Vertebrae for a bending section of an endoscope |
| US5297443A (en) | 1992-07-07 | 1994-03-29 | Wentz John D | Flexible positioning appendage |
| US5318526A (en) | 1992-09-29 | 1994-06-07 | Neuro Navigational Corporation | Flexible endoscope with hypotube activating wire support |
| US5327905A (en) | 1992-02-14 | 1994-07-12 | Boaz Avitall | Biplanar deflectable catheter for arrhythmogenic tissue ablation |
| US5337732A (en) | 1992-09-16 | 1994-08-16 | Cedars-Sinai Medical Center | Robotic endoscopy |
| US5386741A (en) | 1993-06-07 | 1995-02-07 | Rennex; Brian G. | Robotic snake |
| US5448989A (en) | 1993-02-22 | 1995-09-12 | Richard Wolf Gmbh | Medical instrument shaft capable of positive and non-positive linking of segments |
| US5524180A (en) | 1992-08-10 | 1996-06-04 | Computer Motion, Inc. | Automated endoscope system for optimal positioning |
| US5759151A (en) | 1995-06-07 | 1998-06-02 | Carnegie Mellon University | Flexible steerable device for conducting exploratory procedures |
| US6080181A (en) | 1995-06-07 | 2000-06-27 | Sri International | System and method for releasably holding a surgical instrument |
| US6132368A (en) | 1996-12-12 | 2000-10-17 | Intuitive Surgical, Inc. | Multi-component telepresence system and method |
| US6223100B1 (en) | 1992-01-21 | 2001-04-24 | Sri, International | Apparatus and method for performing computer enhanced surgery with articulated instrument |
| US20010013764A1 (en) | 1998-08-04 | 2001-08-16 | Blumenkranz Steven J. | Manipulator positioning linkage for robotic surgery |
| US6440061B1 (en)* | 2000-03-24 | 2002-08-27 | Donald E. Wenner | Laparoscopic instrument system for real-time biliary exploration and stone removal |
| US20020133174A1 (en) | 2001-01-16 | 2002-09-19 | Microdexterity Systems, Inc. | Surgical manipulator |
| US20020161281A1 (en) | 2000-04-03 | 2002-10-31 | Ross Jaffe | Endoscope having a guide tube |
| US20030135203A1 (en) | 2002-01-16 | 2003-07-17 | Yulun Wang | Minimally invasive surgical training using robotics and tele-collaboration |
| US6743239B1 (en) | 2000-05-25 | 2004-06-01 | St. Jude Medical, Inc. | Devices with a bendable tip for medical procedures |
| US20040138529A1 (en) | 2003-01-15 | 2004-07-15 | Usgi Medical Corp. | Endoluminal tool deployment system |
| US20040193146A1 (en) | 2001-02-15 | 2004-09-30 | Endo Via Medical, Inc. | Robotically controlled surgical instruments |
| US6837847B2 (en) | 2002-06-13 | 2005-01-04 | Usgi Medical, Inc. | Shape lockable apparatus and method for advancing an instrument through unsupported anatomy |
| US20050033287A1 (en) | 2003-07-01 | 2005-02-10 | Sra Jasbir S. | Method and apparatus for epicardial left atrial appendage isolation in patients with atrial fibrillation |
| US20050090811A1 (en) | 2000-07-20 | 2005-04-28 | Doyle Mark C. | Hand-actuated articulating surgical tool |
| US6916306B1 (en) | 2000-11-10 | 2005-07-12 | Boston Scientific Scimed, Inc. | Steerable loop structures for supporting diagnostic and therapeutic elements in contact with body tissue |
| US20050216033A1 (en) | 2001-02-15 | 2005-09-29 | Endo Via Medical Inc. | Robotically controlled medical instrument with a flexible section |
| US20060052664A1 (en) | 2000-04-03 | 2006-03-09 | Julian Christopher A | Connector device for a controllable instrument |
| US20070299387A1 (en) | 2006-04-24 | 2007-12-27 | Williams Michael S | System and method for multi-instrument surgical access using a single access port |
| US20080027279A1 (en) | 2007-10-24 | 2008-01-31 | Abou El Kheir Tarek A N | Endoscopic System and Method for Therapeutic Applications and Obtaining 3-Dimensional Human Vision Simulated Imaging With Real Dynamic Convergence |
| US20080119868A1 (en) | 2006-11-22 | 2008-05-22 | Minos Medical | Methods and Apparatus for Natural Orifice Vaginal Hysterectomy |
| US20080163603A1 (en) | 2006-10-24 | 2008-07-10 | Innovention Technologies, Llc. | Steerable multi-linked device having a modular link assembly |
| US20080188869A1 (en) | 2006-12-01 | 2008-08-07 | Barry Weitzner | On-axis drive systems and methods |
| US20080245173A1 (en) | 2007-02-27 | 2008-10-09 | Carnegie Mellon University | System for controlling the movement of a multi-linked device |
| US20090030428A1 (en) | 2007-07-25 | 2009-01-29 | Terumo Kabushiki Kaisha | Operating mechanism, medical manipulator, and surgical robot system |
| US20090171151A1 (en) | 2004-06-25 | 2009-07-02 | Choset Howard M | Steerable, follow the leader device |
| WO2010050771A2 (en) | 2008-10-31 | 2010-05-06 | Chang Wook Jeong | Surgical robot system having tool for minimally invasive surgery |
| US20100160735A1 (en) | 2008-12-18 | 2010-06-24 | Ethicon Endo-Surgery, Inc. | Steerable surgical access devices and methods |
| US20100160736A1 (en) | 2004-08-31 | 2010-06-24 | Surgical Solutions Llc | Medical Device With Articulating Shaft |
| US20100204713A1 (en) | 2006-02-03 | 2010-08-12 | The European Atomic Energy Community (Euratom) | Medical robotic system |
| US7789875B2 (en) | 1998-02-24 | 2010-09-07 | Hansen Medical, Inc. | Surgical instruments |
| US20100224022A1 (en) | 2008-10-13 | 2010-09-09 | Seung Wook Choi | Surgical slave robot |
| US20100280325A1 (en) | 2009-04-30 | 2010-11-04 | Tamer Ibrahim | Retractors and surgical systems including the same |
| US7850642B2 (en) | 2004-03-05 | 2010-12-14 | Hansen Medical, Inc. | Methods using a robotic catheter system |
| US7867241B2 (en) | 1998-02-24 | 2011-01-11 | Hansen Medical, Inc. | Flexible instrument |
| US20110028790A1 (en) | 2004-09-24 | 2011-02-03 | Vivid Medical, Inc. | Disposable endoscopic access device and portable display |
| US20110071543A1 (en)* | 2009-09-23 | 2011-03-24 | Intuitive Surgical, Inc. | Curved cannula surgical system control |
| US20110105954A1 (en) | 2008-01-16 | 2011-05-05 | Catheter Robotics, Inc. | Remotely controlled catheter insertion system |
| US7946546B2 (en) | 2006-10-20 | 2011-05-24 | Carnegie Mellon University | Apparatus for positioning a device |
| US20110152613A1 (en) | 2008-04-14 | 2011-06-23 | Carnegie Mellon University | Articulated device with visualization system |
| US20110184241A1 (en) | 2008-06-05 | 2011-07-28 | Cardiorobotics, Inc. | Extendable articulated probe device |
| US8075476B2 (en) | 2004-07-27 | 2011-12-13 | Intuitive Surgical Operations, Inc. | Cannula system and method of use |
| US20110313243A1 (en) | 2008-09-05 | 2011-12-22 | Carnegie Mellon University | Multi-linked endoscopic device with spherical distal assembly |
| US8192422B2 (en) | 2006-08-14 | 2012-06-05 | Medrobotics Corporation | Steerable multi linked device having multiple working ports |
| US20120209073A1 (en) | 2004-03-23 | 2012-08-16 | Boston Scientific Scimed, Inc. | In-vivo visualization system |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA2003497C (en)* | 1989-11-21 | 1999-04-06 | Michael M. Greenberg | Probe-correlated viewing of anatomical image data |
| JP2719992B2 (en)* | 1992-02-20 | 1998-02-25 | 富士写真光機株式会社 | In-vivo diagnostic device |
| US5347993A (en)* | 1992-02-20 | 1994-09-20 | Fuji Photo Optical Co., Ltd. | Body cavity diagnostic apparatus |
| CN1162251A (en)* | 1994-09-30 | 1997-10-15 | 俄亥俄医疗器械公司 | Appuratus and method for neurosurgical stereotactic procedures |
| ATE481124T1 (en)* | 1996-02-27 | 2010-10-15 | Braun Melsungen Ag | NEEDLE TIP PROTECTION FOR SUBCUTANEOUS INJECTIONS |
| US7666191B2 (en)* | 1996-12-12 | 2010-02-23 | Intuitive Surgical, Inc. | Robotic surgical system with sterile surgical adaptor |
| CN1100516C (en)* | 1997-08-27 | 2003-02-05 | 北京航空航天大学 | Cerebrosurgical operation equipment system with robot and its implement method |
| US7758569B2 (en)* | 1998-02-24 | 2010-07-20 | Hansen Medical, Inc. | Interchangeable surgical instrument |
| US6234958B1 (en) | 1998-11-30 | 2001-05-22 | Medical Access Systems, Llc | Medical device introduction system including medical introducer having a plurality of access ports and methods of performing medical procedures with same |
| US6994708B2 (en)* | 2001-04-19 | 2006-02-07 | Intuitive Surgical | Robotic tool with monopolar electro-surgical scissors |
| WO2005087128A1 (en) | 2004-03-05 | 2005-09-22 | Hansen Medical, Inc. | Robotic catheter system |
| JP4022526B2 (en)* | 2004-03-30 | 2007-12-19 | 株式会社東芝 | Medical instruments |
| KR100617974B1 (en)* | 2004-04-22 | 2006-08-31 | 한국과학기술원 | Laparoscopic device capable of command following |
| AU2006206546A1 (en)* | 2005-01-19 | 2006-07-27 | Accu-Break Pharmaceuticals, Inc. | Removal of material from a preformed tablet |
| JP4999012B2 (en)* | 2005-06-06 | 2012-08-15 | インチュイティブ サージカル,インコーポレイテッド | Laparoscopic ultrasonic robotic surgical system |
| US7930065B2 (en)* | 2005-12-30 | 2011-04-19 | Intuitive Surgical Operations, Inc. | Robotic surgery system including position sensors using fiber bragg gratings |
| US20090138025A1 (en)* | 2007-05-04 | 2009-05-28 | Hansen Medical, Inc. | Apparatus systems and methods for forming a working platform of a robotic instrument system by manipulation of components having controllably rigidity |
| US8864652B2 (en) | 2008-06-27 | 2014-10-21 | Intuitive Surgical Operations, Inc. | Medical robotic system providing computer generated auxiliary views of a camera instrument for controlling the positioning and orienting of its tip |
| CN201263685Y (en)* | 2008-07-18 | 2009-07-01 | 李昌伟 | Three-dimensional positioning apparatus for probe of transvaginal ultrasound operation |
| JP5384869B2 (en) | 2008-07-24 | 2014-01-08 | オリンパスメディカルシステムズ株式会社 | Endoscopic treatment system |
| JP2011045499A (en)* | 2009-08-26 | 2011-03-10 | Terumo Corp | Medical manipulator |
| US8644988B2 (en)* | 2010-05-14 | 2014-02-04 | Intuitive Surgical Operations, Inc. | Drive force control in medical instrument providing position measurements |
| JP5711380B2 (en)* | 2010-10-22 | 2015-04-30 | メドロボティクス コーポレイション | Articulated robotic probe |
| JP6167041B2 (en)* | 2010-11-11 | 2017-07-19 | メドロボティクス コーポレイション | Introduction assembly for articulated robotic probes |
| CN104010773B (en)* | 2011-09-13 | 2017-01-18 | 美的洛博迪克斯公司 | Highly Articulated Probes With Anti-Twist Link Arrangement, Methods Of Formation Thereof, And Methods Of Performing Medical Procedures |
| WO2013096610A1 (en)* | 2011-12-21 | 2013-06-27 | Oyola Arnold E | Stabilizing apparatus for highly articulated probes with link arrangement, methods of formation thereof, and methods of use thereof |
| CA2966131A1 (en)* | 2014-06-05 | 2015-12-10 | Medrobotics Corporation | Articulating robotic probes, systems and methods incorporating the same, and methods for performing surgical procedures |
- 2012
- 2012-12-20WOPCT/US2012/070924patent/WO2013096610A1/enactiveApplication Filing
- 2012-12-20USUS14/364,195patent/US9364955B2/ennot_activeExpired - Fee Related
- 2012-12-20CNCN201280070375.4Apatent/CN104470455B/ennot_activeExpired - Fee Related
- 2012-12-20JPJP2014548888Apatent/JP6449018B2/ennot_activeExpired - Fee Related
- 2012-12-20CNCN201810156249.XApatent/CN108262741A/enactivePending
- 2012-12-20EPEP12860859.3Apatent/EP2793729B1/ennot_activeNot-in-force
- 2012-12-20AUAU2012358829Apatent/AU2012358829B2/ennot_activeCeased
- 2012-12-20CACA2858831Apatent/CA2858831A1/ennot_activeAbandoned
- 2012-12-20KRKR1020147020367Apatent/KR20140104502A/ennot_activeCeased
- 2014
- 2014-06-15ILIL233136Apatent/IL233136A0/enunknown
- 2016
- 2016-06-13USUS15/180,503patent/US9821477B2/ennot_activeExpired - Fee Related
- 2017
- 2017-10-18USUS15/786,901patent/US20180161992A1/ennot_activeAbandoned
- 2017-11-03AUAU2017254957Apatent/AU2017254957A1/ennot_activeAbandoned
- 2018
- 2018-10-18JPJP2018196868Apatent/JP2019022734A/enactivePending
- 2020
- 2020-02-05AUAU2020200832Apatent/AU2020200832A1/ennot_activeAbandoned
Patent Citations (170)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3060972A (en) | 1957-08-22 | 1962-10-30 | Bausch & Lomb | Flexible tube structures |
| US3557780A (en) | 1967-04-20 | 1971-01-26 | Olympus Optical Co | Mechanism for controlling flexure of endoscope |
| US3583393A (en) | 1967-12-26 | 1971-06-08 | Olympus Optical Co | Bendable tube assembly |
| US3572325A (en) | 1968-10-25 | 1971-03-23 | Us Health Education & Welfare | Flexible endoscope having fluid conduits and control |
| US3643653A (en) | 1968-12-24 | 1972-02-22 | Olympus Optical Co | Endoscopic apparatus |
| US3638973A (en) | 1969-06-04 | 1972-02-01 | Charles Ellis Poletti | Joint means for use in work supporting arm |
| US3625200A (en) | 1969-08-26 | 1971-12-07 | Us Catheter & Instr Corp | Controlled curvable tip member |
| US3739770A (en) | 1970-10-09 | 1973-06-19 | Olympus Optical Co | Bendable tube of an endoscope |
| US3703968A (en) | 1971-09-20 | 1972-11-28 | Us Navy | Linear linkage manipulator arm |
| US3790002A (en) | 1971-10-11 | 1974-02-05 | Commissariat Energie Atomique | Manipulator with drive motors |
| US3892228A (en) | 1972-10-06 | 1975-07-01 | Olympus Optical Co | Apparatus for adjusting the flexing of the bending section of an endoscope |
| US3920972A (en) | 1974-07-16 | 1975-11-18 | Cincinnati Milacron Inc | Method and apparatus for programming a computer operated robot arm |
| US4078670A (en) | 1974-07-18 | 1978-03-14 | Commissariat A L'energie Atomique | Cable-operated power manipulator |
| US4108211A (en) | 1975-04-28 | 1978-08-22 | Fuji Photo Optical Co., Ltd. | Articulated, four-way bendable tube structure |
| US4150329A (en) | 1976-03-29 | 1979-04-17 | Asea Aktiebolag | Method and means in an industrial robot for the generation of a complex movement |
| US4299533A (en) | 1978-06-06 | 1981-11-10 | Shiroyama Kogyo Kabushiki Kaisha | Jointed manipulator |
| US4260319A (en) | 1978-07-28 | 1981-04-07 | Motoda Denshi Kogyo Kabushiki Kaisha | End position control robot |
| US4221997A (en) | 1978-12-18 | 1980-09-09 | Western Electric Company, Incorporated | Articulated robot arm and method of moving same |
| US4494417A (en) | 1979-03-16 | 1985-01-22 | Robotgruppen Hb | Flexible arm, particularly a robot arm |
| US4432349A (en) | 1979-04-03 | 1984-02-21 | Fuji Photo Optical Co., Ltd. | Articulated tube structure for use in an endoscope |
| US4474174A (en) | 1979-05-21 | 1984-10-02 | American Hospital Supply Corporation | Surgical instrument for an endoscope |
| US4259876A (en) | 1979-10-02 | 1981-04-07 | Belyanin Petr N | Mechanical arm |
| US4351323A (en) | 1979-10-20 | 1982-09-28 | Kabushiki Kaisha Medos Kenkyusho | Curvable pipe assembly in endoscope |
| US4445184A (en) | 1980-07-19 | 1984-04-24 | Shin Meiwa Industry Co., Ltd. | Articulated robot |
| US4502830A (en) | 1980-09-30 | 1985-03-05 | Fujitsu Fanuc Limited | Industrial robot |
| US4531885A (en) | 1981-10-05 | 1985-07-30 | Graco Robotics, Inc. | Device for robot manipulator |
| US4496278A (en) | 1982-04-07 | 1985-01-29 | Okamura Corporation | Industrial robot equipped with articulated arm unit |
| US4535207A (en) | 1982-06-24 | 1985-08-13 | Asea Aktiebolag | Safety device in an operating unit for an industrial robot |
| US4888708A (en) | 1982-06-28 | 1989-12-19 | Asea Aktiebolag | Control system for an industrial robot |
| US4479914A (en) | 1982-11-01 | 1984-10-30 | Cashiers Plastics | Process and mold for molding foamed plastic articles |
| US4806066A (en) | 1982-11-01 | 1989-02-21 | Microbot, Inc. | Robotic arm |
| US4517963A (en) | 1983-01-04 | 1985-05-21 | Harold Unger | Image-erecting barrel rotator for articulated optical arm |
| US4475375A (en) | 1983-01-24 | 1984-10-09 | Hill Ernest W | Multi-flex tube bending mandrel |
| US4666366A (en) | 1983-02-14 | 1987-05-19 | Canon Kabushiki Kaisha | Articulated arm transfer device |
| US4900218A (en) | 1983-04-07 | 1990-02-13 | Sutherland Ivan E | Robot arm structure |
| US4564179A (en) | 1984-04-12 | 1986-01-14 | Hollingsworth Ashley J | Articulated support arm apparatus |
| US4706001A (en) | 1984-07-04 | 1987-11-10 | Fanuc Ltd. | Industrial robot |
| US4600355A (en) | 1984-08-29 | 1986-07-15 | Cybot, Inc. | Modular robotics system with basic interchangeable parts |
| US4661032A (en) | 1984-12-20 | 1987-04-28 | Agency Of Industrial Science & Technology, Ministry Of International Trade & Industry | Bilateral master-slave manipulator control device |
| US4655257A (en) | 1985-03-25 | 1987-04-07 | Kabushiki Kaisha Machida Seisakusho | Guide tube assembly for industrial endoscope |
| US5006035A (en) | 1985-04-27 | 1991-04-09 | Fanuc, Ltd. | Industrial robot |
| US4831547A (en) | 1985-06-06 | 1989-05-16 | Toyota Jidosha Kabushiki Kaisha | Multi-joint-robot controller for enabling detection of the spatial relationship between a robot and a rotary cable |
| US4700693A (en) | 1985-12-09 | 1987-10-20 | Welch Allyn, Inc. | Endoscope steering section |
| US4726355A (en) | 1986-02-17 | 1988-02-23 | Olympus Optical Co., Ltd. | Curvable part device for endoscope devices |
| US4943296A (en) | 1986-03-28 | 1990-07-24 | Life Technology Research Foundation | Robot for surgical operation |
| US5078140A (en) | 1986-05-08 | 1992-01-07 | Kwoh Yik S | Imaging device - aided robotic stereotaxis system |
| US4956790A (en) | 1987-02-06 | 1990-09-11 | Kabushiki Kaisha Toshiba | Instruction system of remote-control robot |
| US4830569A (en) | 1987-03-31 | 1989-05-16 | Asea Brown Boveri Ab | Industrial robot having a detachable electrical connection between housing on robot arm and tool holder |
| US4864888A (en) | 1987-04-13 | 1989-09-12 | Mitsubishi Denki Kabushiki Kaisha | Robot articulation joint |
| US4838859A (en) | 1987-05-19 | 1989-06-13 | Steve Strassmann | Steerable catheter |
| US4863133A (en) | 1987-05-26 | 1989-09-05 | Leonard Medical | Arm device for adjustable positioning of a medical instrument or the like |
| US4796607A (en) | 1987-07-28 | 1989-01-10 | Welch Allyn, Inc. | Endoscope steering section |
| US4790294A (en) | 1987-07-28 | 1988-12-13 | Welch Allyn, Inc. | Ball-and-socket bead endoscope steering section |
| US4873965A (en) | 1987-07-31 | 1989-10-17 | Guido Danieli | Flexible endoscope |
| US4787369A (en) | 1987-08-14 | 1988-11-29 | Welch Allyn, Inc. | Force relieving, force limiting self-adjusting steering for borescope or endoscope |
| US4804897A (en) | 1987-08-19 | 1989-02-14 | Hewlett-Packard Company | Orientation-dependant robot controller |
| US4805477A (en) | 1987-10-22 | 1989-02-21 | Gmf Robotics Corporation | Multiple joint robot part |
| US4780045A (en) | 1987-11-09 | 1988-10-25 | Gmf Robotics Corporation | Robot with improved cable routing system |
| US5046375A (en) | 1988-04-21 | 1991-09-10 | Massachusetts Institute Of Technology | Compact cable transmission with cable differential |
| US5236432A (en) | 1988-04-26 | 1993-08-17 | Board Of Regents Of The University Of Washington | Robot-aided system for surgery |
| US4979949A (en) | 1988-04-26 | 1990-12-25 | The Board Of Regents Of The University Of Washington | Robot-aided system for surgery |
| US5005558A (en) | 1988-05-16 | 1991-04-09 | Kabushiki Kaisha Toshiba | Endoscope |
| US5012169A (en) | 1988-07-20 | 1991-04-30 | Yokogawa Electric Corporation | Motor drive system |
| US4950116A (en) | 1988-08-18 | 1990-08-21 | Kabushiki Kaisha Toshiba | Manipulator controlling apparatus |
| US5105819A (en) | 1988-09-01 | 1992-04-21 | Kon-Tron Elektronik AG | Ultrasound endoscope device |
| US4947827A (en) | 1988-12-30 | 1990-08-14 | Opielab, Inc. | Flexible endoscope |
| US5037391A (en) | 1989-01-09 | 1991-08-06 | Pilot Cardiovascular Systems, Inc. | Steerable angioplasty device |
| US5203772A (en) | 1989-01-09 | 1993-04-20 | Pilot Cardiovascular Systems, Inc. | Steerable medical device |
| US4998916A (en) | 1989-01-09 | 1991-03-12 | Hammerslag Julius G | Steerable medical device |
| US5064340A (en) | 1989-01-20 | 1991-11-12 | Genmark Automation | Precision arm mechanism |
| US4941457A (en) | 1989-08-17 | 1990-07-17 | Olympus Optical Co., Ltd. | Endoscope using an optical guide twisted on the tip side to have the visual field direction and curvature axis coincide with each other |
| US5201325A (en) | 1989-09-01 | 1993-04-13 | Andronic Devices Ltd. | Advanced surgical retractor |
| US5203380A (en) | 1989-10-13 | 1993-04-20 | Kabushiki Kaisha Machida Seisakusho | Bending device |
| US5176126A (en) | 1989-10-13 | 1993-01-05 | Kabushiki Kaisha Machida Seisakusho | Bending device |
| US4949927A (en) | 1989-10-17 | 1990-08-21 | John Madocks | Articulable column |
| US5178129A (en) | 1989-12-28 | 1993-01-12 | Kabushiki Kaisha Machida Seisakusho | Method of producing bending device |
| US5108368A (en) | 1990-01-04 | 1992-04-28 | Pilot Cardiovascular System, Inc. | Steerable medical device |
| US5174277A (en) | 1990-01-24 | 1992-12-29 | Kabushiki Kaisha Toshiba | Endoscope |
| US5195968A (en) | 1990-02-02 | 1993-03-23 | Ingemar Lundquist | Catheter steering mechanism |
| US5254088A (en) | 1990-02-02 | 1993-10-19 | Ep Technologies, Inc. | Catheter steering mechanism |
| US5200679A (en) | 1990-02-22 | 1993-04-06 | Graham Douglas F | Artificial hand and digit therefor |
| US5167221A (en) | 1990-03-14 | 1992-12-01 | Kabushiki Kaisha Machida Seisakusho | Bending device |
| US5143475A (en) | 1990-03-14 | 1992-09-01 | Kabushiki Kaisha Machida Seisakusho | Bending device |
| US5086401A (en) | 1990-05-11 | 1992-02-04 | International Business Machines Corporation | Image-directed robotic system for precise robotic surgery including redundant consistency checking |
| US5179935A (en) | 1990-05-17 | 1993-01-19 | Olympus Optical Co., Ltd. | Endoscope provided in the insertable section with a flexible part which can be made linear |
| US5193963A (en) | 1990-10-31 | 1993-03-16 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Force reflecting hand controller |
| US5044063A (en) | 1990-11-02 | 1991-09-03 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Robotic tool change mechanism |
| US5217003A (en) | 1991-03-18 | 1993-06-08 | Wilk Peter J | Automated surgical system and apparatus |
| US5217453A (en) | 1991-03-18 | 1993-06-08 | Wilk Peter J | Automated surgical system and apparatus |
| US5180276A (en) | 1991-04-18 | 1993-01-19 | Brooks Automation, Inc. | Articulated arm transfer device |
| US5251611A (en) | 1991-05-07 | 1993-10-12 | Zehel Wendell E | Method and apparatus for conducting exploratory procedures |
| US5266875A (en) | 1991-05-23 | 1993-11-30 | Massachusetts Institute Of Technology | Telerobotic system |
| US5271381A (en) | 1991-11-18 | 1993-12-21 | Vision Sciences, Inc. | Vertebrae for a bending section of an endoscope |
| US6223100B1 (en) | 1992-01-21 | 2001-04-24 | Sri, International | Apparatus and method for performing computer enhanced surgery with articulated instrument |
| US5257669A (en) | 1992-02-10 | 1993-11-02 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Climbing robot |
| US5327905A (en) | 1992-02-14 | 1994-07-12 | Boaz Avitall | Biplanar deflectable catheter for arrhythmogenic tissue ablation |
| US5297443A (en) | 1992-07-07 | 1994-03-29 | Wentz John D | Flexible positioning appendage |
| US5815640A (en) | 1992-08-10 | 1998-09-29 | Computer Motion, Inc. | Automated endoscope system for optimal positioning |
| EP0653922B1 (en) | 1992-08-10 | 1999-12-15 | Computer Motion, Inc. | Automated endoscope system for optimal positioning |
| US5907664A (en) | 1992-08-10 | 1999-05-25 | Computer Motion, Inc. | Automated endoscope system for optimal positioning |
| US5524180A (en) | 1992-08-10 | 1996-06-04 | Computer Motion, Inc. | Automated endoscope system for optimal positioning |
| US5841950A (en) | 1992-08-10 | 1998-11-24 | Computer Motion, Inc. | Automated endoscope system for optimal positioning |
| US5337732A (en) | 1992-09-16 | 1994-08-16 | Cedars-Sinai Medical Center | Robotic endoscopy |
| US5318526A (en) | 1992-09-29 | 1994-06-07 | Neuro Navigational Corporation | Flexible endoscope with hypotube activating wire support |
| US5448989A (en) | 1993-02-22 | 1995-09-12 | Richard Wolf Gmbh | Medical instrument shaft capable of positive and non-positive linking of segments |
| US5386741A (en) | 1993-06-07 | 1995-02-07 | Rennex; Brian G. | Robotic snake |
| US5759151A (en) | 1995-06-07 | 1998-06-02 | Carnegie Mellon University | Flexible steerable device for conducting exploratory procedures |
| US6080181A (en) | 1995-06-07 | 2000-06-27 | Sri International | System and method for releasably holding a surgical instrument |
| US20020091374A1 (en) | 1996-12-12 | 2002-07-11 | Intuitive Surgical, Inc. | Multi-component telepresence system and method |
| US20080147091A1 (en) | 1996-12-12 | 2008-06-19 | Intuitive Surgical, Inc. | Multi-component telepresence system and method |
| US6346072B1 (en) | 1996-12-12 | 2002-02-12 | Intuitive Surgical, Inc. | Multi-component telepresence system and method |
| US7357774B2 (en) | 1996-12-12 | 2008-04-15 | Intuitive Surgical Inc. | Multi-component telepresence system and method |
| US20050021050A1 (en) | 1996-12-12 | 2005-01-27 | Intuitive Surgical, Inc. | Multi-component telepresence system and method |
| EP1015068B1 (en) | 1996-12-12 | 2011-09-07 | Intuitive Surgical Operations, Inc. | Multi-component telepresence system and method for preparation |
| US20110066161A1 (en) | 1996-12-12 | 2011-03-17 | Intuitive Surgical Operations, Inc. | Multi-Component Telepresence System and Method |
| US20110028990A1 (en) | 1996-12-12 | 2011-02-03 | Intuitive Surgical Operations, Inc. | Multi-Component Telepresence System and Method |
| US6132368A (en) | 1996-12-12 | 2000-10-17 | Intuitive Surgical, Inc. | Multi-component telepresence system and method |
| US7819885B2 (en) | 1996-12-12 | 2010-10-26 | Intuitive Surgical Operations, Inc. | Multi-component telepresence system and method |
| US7789875B2 (en) | 1998-02-24 | 2010-09-07 | Hansen Medical, Inc. | Surgical instruments |
| US7867241B2 (en) | 1998-02-24 | 2011-01-11 | Hansen Medical, Inc. | Flexible instrument |
| US20010013764A1 (en) | 1998-08-04 | 2001-08-16 | Blumenkranz Steven J. | Manipulator positioning linkage for robotic surgery |
| US6440061B1 (en)* | 2000-03-24 | 2002-08-27 | Donald E. Wenner | Laparoscopic instrument system for real-time biliary exploration and stone removal |
| US6837846B2 (en) | 2000-04-03 | 2005-01-04 | Neo Guide Systems, Inc. | Endoscope having a guide tube |
| US20020161281A1 (en) | 2000-04-03 | 2002-10-31 | Ross Jaffe | Endoscope having a guide tube |
| US20060052664A1 (en) | 2000-04-03 | 2006-03-09 | Julian Christopher A | Connector device for a controllable instrument |
| US6743239B1 (en) | 2000-05-25 | 2004-06-01 | St. Jude Medical, Inc. | Devices with a bendable tip for medical procedures |
| US20050090811A1 (en) | 2000-07-20 | 2005-04-28 | Doyle Mark C. | Hand-actuated articulating surgical tool |
| US20050215992A1 (en) | 2000-11-10 | 2005-09-29 | Jenkins Thomas R | Steerable loop structures for supporting diagnostic and therapeutic elements in contact with body tissue |
| US7182764B2 (en) | 2000-11-10 | 2007-02-27 | Boston Scientific Scimed, Inc. | Steerable loop structures for supporting diagnostic and therapeutic elements in contact with body tissue |
| US6916306B1 (en) | 2000-11-10 | 2005-07-12 | Boston Scientific Scimed, Inc. | Steerable loop structures for supporting diagnostic and therapeutic elements in contact with body tissue |
| US20020133174A1 (en) | 2001-01-16 | 2002-09-19 | Microdexterity Systems, Inc. | Surgical manipulator |
| US20050216033A1 (en) | 2001-02-15 | 2005-09-29 | Endo Via Medical Inc. | Robotically controlled medical instrument with a flexible section |
| US20040193146A1 (en) | 2001-02-15 | 2004-09-30 | Endo Via Medical, Inc. | Robotically controlled surgical instruments |
| US7854738B2 (en) | 2001-02-15 | 2010-12-21 | Hansen Medical, Inc. | Robotically controlled medical instrument |
| US20030135203A1 (en) | 2002-01-16 | 2003-07-17 | Yulun Wang | Minimally invasive surgical training using robotics and tele-collaboration |
| US6837847B2 (en) | 2002-06-13 | 2005-01-04 | Usgi Medical, Inc. | Shape lockable apparatus and method for advancing an instrument through unsupported anatomy |
| US20050065397A1 (en) | 2003-01-15 | 2005-03-24 | Usgi Medical Inc. | Endoluminal tool deployment system |
| US20040138529A1 (en) | 2003-01-15 | 2004-07-15 | Usgi Medical Corp. | Endoluminal tool deployment system |
| US7918845B2 (en) | 2003-01-15 | 2011-04-05 | Usgi Medical, Inc. | Endoluminal tool deployment system |
| US20050033287A1 (en) | 2003-07-01 | 2005-02-10 | Sra Jasbir S. | Method and apparatus for epicardial left atrial appendage isolation in patients with atrial fibrillation |
| US7850642B2 (en) | 2004-03-05 | 2010-12-14 | Hansen Medical, Inc. | Methods using a robotic catheter system |
| US20120209073A1 (en) | 2004-03-23 | 2012-08-16 | Boston Scientific Scimed, Inc. | In-vivo visualization system |
| US20090171151A1 (en) | 2004-06-25 | 2009-07-02 | Choset Howard M | Steerable, follow the leader device |
| US8075476B2 (en) | 2004-07-27 | 2011-12-13 | Intuitive Surgical Operations, Inc. | Cannula system and method of use |
| US20100160736A1 (en) | 2004-08-31 | 2010-06-24 | Surgical Solutions Llc | Medical Device With Articulating Shaft |
| US20110028790A1 (en) | 2004-09-24 | 2011-02-03 | Vivid Medical, Inc. | Disposable endoscopic access device and portable display |
| US20100204713A1 (en) | 2006-02-03 | 2010-08-12 | The European Atomic Energy Community (Euratom) | Medical robotic system |
| US20070299387A1 (en) | 2006-04-24 | 2007-12-27 | Williams Michael S | System and method for multi-instrument surgical access using a single access port |
| US8192422B2 (en) | 2006-08-14 | 2012-06-05 | Medrobotics Corporation | Steerable multi linked device having multiple working ports |
| US7946546B2 (en) | 2006-10-20 | 2011-05-24 | Carnegie Mellon University | Apparatus for positioning a device |
| US20080163603A1 (en) | 2006-10-24 | 2008-07-10 | Innovention Technologies, Llc. | Steerable multi-linked device having a modular link assembly |
| US7854109B2 (en) | 2006-10-24 | 2010-12-21 | Carnegie Mellon University | Steerable multi-linked device having a modular link assembly |
| US20110056320A1 (en) | 2006-10-24 | 2011-03-10 | Carnegie Mellon University | Steerable multi-linked device having a modular link assembly |
| US20080119868A1 (en) | 2006-11-22 | 2008-05-22 | Minos Medical | Methods and Apparatus for Natural Orifice Vaginal Hysterectomy |
| US20080188869A1 (en) | 2006-12-01 | 2008-08-07 | Barry Weitzner | On-axis drive systems and methods |
| US20080245173A1 (en) | 2007-02-27 | 2008-10-09 | Carnegie Mellon University | System for controlling the movement of a multi-linked device |
| US8100031B2 (en) | 2007-02-27 | 2012-01-24 | Carnegie Mellon University | Multi-linked device having a reinforcing member |
| US8459138B2 (en) | 2007-02-27 | 2013-06-11 | Carnegie Mellon University | System for releasably attaching a disposable device to a durable device |
| US20090030428A1 (en) | 2007-07-25 | 2009-01-29 | Terumo Kabushiki Kaisha | Operating mechanism, medical manipulator, and surgical robot system |
| US20080027279A1 (en) | 2007-10-24 | 2008-01-31 | Abou El Kheir Tarek A N | Endoscopic System and Method for Therapeutic Applications and Obtaining 3-Dimensional Human Vision Simulated Imaging With Real Dynamic Convergence |
| US20110105954A1 (en) | 2008-01-16 | 2011-05-05 | Catheter Robotics, Inc. | Remotely controlled catheter insertion system |
| US20110152613A1 (en) | 2008-04-14 | 2011-06-23 | Carnegie Mellon University | Articulated device with visualization system |
| US20110184241A1 (en) | 2008-06-05 | 2011-07-28 | Cardiorobotics, Inc. | Extendable articulated probe device |
| US20110313243A1 (en) | 2008-09-05 | 2011-12-22 | Carnegie Mellon University | Multi-linked endoscopic device with spherical distal assembly |
| US20100224022A1 (en) | 2008-10-13 | 2010-09-09 | Seung Wook Choi | Surgical slave robot |
| US20110213384A1 (en) | 2008-10-31 | 2011-09-01 | Chang Wook Jeong | Surgical robot system having tool for minimally invasive surgery |
| WO2010050771A2 (en) | 2008-10-31 | 2010-05-06 | Chang Wook Jeong | Surgical robot system having tool for minimally invasive surgery |
| US20100160735A1 (en) | 2008-12-18 | 2010-06-24 | Ethicon Endo-Surgery, Inc. | Steerable surgical access devices and methods |
| US20100280325A1 (en) | 2009-04-30 | 2010-11-04 | Tamer Ibrahim | Retractors and surgical systems including the same |
| US20110071543A1 (en)* | 2009-09-23 | 2011-03-24 | Intuitive Surgical, Inc. | Curved cannula surgical system control |
Non-Patent Citations (162)
| Title |
|---|
| "An Improved CT-Aided Stereotactic Neurosurgery Technique", Fifth Annual Symposium on Computer Applications in Medical Care, 1981, p. 591-595. |
| "Baby Robot", http://cyberneticzoo.com/wp-content/uploads/2010/03/Ticket-robot-russian-1973.pdf, 1970. |
| "Minicomputer Control Robot's Six Electrohydraulic Servoactuators", Hydraulics & Pneumatics, 1982, p. 53-58. |
| A Study on a Basic System Configuration for the PC Interface and the Robot Trajectory Generation, 1993, p. 354-358. |
| A. Swarup, M. Gopal, "On robustness of decentralized control for robot manipulators", Robotics and Autonomous Systems; Department of Electrical Engineering, Indian Institute of Technology, New Delhi-110016, India, 1993, p. 109-112. |
| A.V. Timofejev, N.V. Ivanova, "Expert System of the Control Programs Designing of Adaptive Robots", The Lenigrand Institute of Aircraft Instrumentation, 1991, p. 912-915. |
| Adams, L, Krybus, W., Meyer-Ebrecht, D., Rueger, R., Gilsbach, J.M., Moesges, R., Schloendorff, G., "Computer Assisted Surgery", IEEE Computer Graphics and Application, 1990, p. 43-51. |
| Alberto Rovetta, Xia Wen, Telemanipulation Control of a Robotic Hand With Cooperating Fingers by Means of Telepresence With a Hybrid Virtual-Real Structure, RoManSy 9: Proceedings of the Ninth CISM-IFToMM Symposium on Theory and Practice of Robots and manipulators, 1993, pp. 411-417. |
| Andrew K. Rist, Ellen Y. Lin, Mount Assembly, International Bartholomew O. Nnaji, Ralph Application for Surface Mount Assembly, International Journal of Flexible Manufacturing Systems, 1993, p. 27-52. |
| Antonio Bicchi, J. Kenneth Salisbury, David L. Brock, Experimental Evaluation of Friction Characteristics With an Articulated Robotic Hand, Experimental Robotics II, 1993, p. 153-167. |
| ASEA Industrial Robot System IRb-60, 1975, p. 1-8. |
| Australia Office Action dated Jun. 19, 2014, issued in related Australia Application No. 2011283048. |
| B. Espiau, F. Chaumette, P. Rives, "A new approach to visual servoing in robotics", Research Report; IRISA/INRIA (France), 1990. |
| B.L. Davies, R.D. Hibberd, A. Timoney, J.E.A. Wickham, "A surgeon robot for prostatectomies", Proc. of 2nd Int. Conference on Robotics in Medicine (UK), 1989. |
| Bejczy et al., "Controlling Remote Manipulators Through Kinesthetic Coupling", Computers in Mechanical Engineering, 1983, p. 48-60. |
| Bejczy, A. K., Salisbury, Jr., J, K., "Kinesthetic Coupling Between Operator and Remote Manipulator", Advances in Computer Technology, 1980. |
| Bose, B., Kalra, A.K., Thukral, S., Sood, A., Guha, S.K., Anand, S., Tremor Compensation for Robotics Assisted Microsurgery, Engineering in Medicine and Biology Society, 1992, p. 1067-1068. |
| Bu Yonghong, Wang Yi, "The Identification of Geometric Link Parameters of Robot Manipulators", ACTA Automatica Sinica, 1992. |
| Byong Suk Kim, Computer-Assisted System for Accident Analysis and Mul-Function Protection in Industrial Robot, Papersearch.net (Korean Studies Information Co.), 1993, p. 61-64. |
| C. Samson, B. Espiau, "Robot Control: The Task Function Approach", Oxford Univ., 1990. |
| C.M. Lim; T. Hiyama, "Experimental implementation of a fuzzy logic control scheme for a servomotor", Mechatronics; Department of Electronic Engineering, Ngee Ann Polytechnic, Singapore 2159 Singapore. |
| Cai Zi-Xing, Jiang Zhiming, High-Level Expert System-Based Robot Planning, 1993. |
| Canudas de Wit, C., Ortega, R., Seleme, S.I., Robot Motion Control Using Induction Motor Drives, Robotics and Automation, 1993, p. 533-538. |
| Chang-Boo Kim, Seung-Hoon Lee, Formulation of the Equation of Motion for Flexible Robotics Arms by Using the Finite Element Method, Inha Univ., Daewoo Heavy Industries Ltd, 1992, p. 233-238. |
| Chang-Boo Kim, Seung-Hoon Lee, Inverse Dynamic Analysis of a Flexible Robot Arm With Multiple Joints by Using the Optimal Control Method, Journal of the Korean Society of Precision Engineering , 1993, p. 133-140. |
| Chang-Soo Han, The Optimum Design of a 6 D.O.F. Fully-Parallel Micromanipulator for Enhanced Robot Accuracy, Journal of the Korean Society of Precision Engineering , 1993, p. 42-51. |
| Chun-Yi Su, "Adaptive sliding mode control of nonlinear robotic systems with time-varying parameters", Systems and Control Letters; Department of Mechanical Engineering, University of Victoria, Victoria, B.C. Canada V8W 3P6, 1993, p. 35-41. |
| Claudio Melchiorri, Gabriele Vassura, Mechanical and Control Issues for Integration of an Arm-Hand Robotic System, Experimental Robotics II, 1993, p. 136-152. |
| Conductor Robot, http://cyberneticzoo.com/wp-content/uploads/2010/03/Ticket-robot-russian-1973.pdf, 1973. |
| D.E. Whitney, "The Mathematics of Coordinated Control of Prosthetic Arms and Manipulators", Asme Publication, 1972. |
| Dae-Gab Gweon, Choong-Min Jung, Development of a Robot Wrist for the Assembly of Chamferless Parts, Journal of the Korean Society of Precision Engineering , 1992, p. 36-43. |
| Dennis E. Bullard, "CT-Guided Stereotactic Biopsies Using a Modified Grame and Gildenberg Techniques", Journal of Neurology, Neurosurgery and Psychiatry, 1984, p. 590-595. |
| Dimitrios M. Emiris, Vassilios D. Tourassis, "Singularity-robust decoupled control of dual-elbow manipulators", Journal of Intelligent & Robotic Systems, 1993, p. 225-243. |
| E. Al-Gallaf, A.J. Allen, K. Warwick, "Dextrous hands: Issues relating to a four-finger articulated hand", Mechatronics; Department of Cybernetics, School of Engineering and Information Sciences, University of Reading, Reading, Berks RG6 2AY, U.K., 1993, p. 329-342. |
| E. V. Panteley, A. A. Stotsky, "Adaptive trajectory/force control scheme for constrained robot manipulators", International Journal of Adaptive Control and Signal Processing, 1993, p. 489-496. |
| E.S. Jeon, S.H. Park, J.E. Oh, Singylarty Control of Robot Wrist Joints Using Euler Parameters, Journal of the Korean Society of Precision Engineering , 1992, p. 11-152. |
| Elysseev S., Kuznetzov, N., Lukyanov A., "Control of Robot Vibrations", 1990. |
| Erick Garcia-Benitez; Stephen Yurkovich; Kevin M. Passino, "Rule-Based Supervisory Control of a Two-Link Flexible Manipulator", Journal of Intelligent and Robotic Systems, 1993, p. 195-213. |
| Expo-70 Robot-Vadim Matskevich's students, http://cyberneticzoo.com/wp-content/uploads/2010/03/Expo-70-MK-1969-02-p31-3.pdf, 1969. |
| Extended European Search Report dated Jul. 9, 2015 in related European Application No. 12860859.3. |
| F.M. Kulakov, "Modeling Robot Control in Assembly Operations", Modern Robot Engineering, Moscow, MIR Publishers, 1982, p. 100-116. |
| F.M. Kulakov, Russian Research on Robotics, Intelligent Autonomous Systems, 1995, p. 53-62. |
| Filaretov, V.F., "A Synthesis of Adaptive Control Systems for Industrial Robots", Electronic Mfg Technology Symposium, 1993, p. 168-171. |
| Francois Chaumette, Patrick Rives, Bernard Espiau, "Positioning of a Robot With Respect to an Object, Tracking It and Estimating Its Velocity by Visual Servoing", IEEE International Conf. on Robotics and Automation, 1991, p. 2248-2253. |
| Fumio Harashima, Yaskuhiko Dote, Sensor-Based Robot Systems, Proc. IEEE Int. Symposium; Muroran Institute of Tech. (Japan), 1992, p. 10-19. |
| G.T. Yang, S.D. Ahn, S.C. Lee, TIP Position Control of Flexible Robot Arm by Self-Tuning Fuzzy Algorithm, Chonbuk Univ., 1993, p. 213-217. |
| Gimdongha, imhyeongyo (Dong Ha Kim, Hyeon Kyo Lim) , Safe Speed Limit of Robot Arm During Teaching and Maintenance Work, 1993, p. 64-70. |
| Giulio E. Lancioni, Domenico Bellini, Doretta Oliva, "A robot to provide multi-handicapped blind persons with physical guidance and activity choices", Journal of Developmental and Physical Disabilities, 1993, p. 337-348. |
| H Kojima, R Toyama, Development of Wall Cleaning Robot, 1992. |
| H. Azaria, A. Dvir, "Algorithm optimization using a rule-based system. A case study: The Direct Kinematic Solution in robotics", Journal of Intelligent & Robotic Systems, 1993, p. 309-324. |
| H. C. Shen, W. P. Yan, G. E. Taylor, Intelligent Sensory Decision-Making for Error Identification in Autonomous Robotics Systems, The International Journal of Advanced Manufacturing Technology, 1993, p. 377-384. |
| H.A. Paul, B. Mittelstadt, W.L, Bargar, B. Musits, R.H. Taylor, P. Kazanzides, J. Zuhars, B. Williamson, W. Hanson, "A surgical robot for total hip replacement surgery", IEEE Conference on Robotics and Automation (Nice), 1992, p. 606-611. |
| H.S. Moon, S.Y. Lee, S.J. Na, A Study on Selection of Gas Metal ARC Welding Parameters of Fillet Joints Using Neural Network, Journal of the Korean Welding Society, 1993, p. 151-160. |
| Han-Sig Lee, The Prospects for the Future on Research of Flexible Automation and Robot System, 1992, p. 37-38. |
| Henk Nijmeijer, "Global regulation of robots using only position measurements", Systems and Control Letters; Department of Electrical Engineering, Mechatronics Research Centre Twente, University of Twente, P.O. Box 217, 7500 AE Enschede, Netherlands, 1992, p. 289-293. |
| Heung-Joo Jeon, Bum-Hee Lee, Robot Motion Planning for Time-Varying Obstacle Avoidance Using the Distance Function, 1992, p. 1429-1438. |
| Hitoshi Maekawa, Kazuhito Yokoi, Kazuo Tanie, Makoto Kaneko, Nobuo Kimura, Nobuaki Imamura, "Development of a three-fingered robot hand with stiffness control capability", Mechatronics; Mechanical Engineering Laboratory, 1992, p. 483-494. |
| Ho Kyung Kim, Nonlinear States of Suspension Static Analysis and Determination of Initial Equilibrium Bridges, 1993, p. 177-186. |
| International Machine Intelligence Robot System Users Manual, International Machine Intelligence, 1983. |
| International Search Report and Written Opinion dated Apr. 25, 2013, issued in related International Application No. PCT/US2012/070924. |
| International Search Report and Written Opinion dated Apr. 6, 2012, issued in related International Application No. PCT/US2011/044811. |
| International Search Report and Written Opinion dated Dec. 9, 2013, issued in related International Application No. PCT/US2013/054326. |
| International Search Report and Written Opinion dated Feb. 27, 2013, issued in related International Application No. PCT/US2012/054802. |
| International Search Report and Written Opinion dated May 19, 2014, issued in related International Application No. PCT/US2014/010808. |
| International Search Report and Written Opinion dated May 30, 2012, issued in related International Application No. PCT/US2011/057282. |
| International Search Report and Written Opinion dated May 31, 2012, issued in related International Application No. PCT/US2011/060214. |
| International Search Report and Written Opinion dated Nov. 28, 2012, issued in related International Application No. PCT/US2012/040414. |
| J. I. Arocena, R. W. Daniel, P. Elosegui, End Point Control of Compliant Robots, Experimental Robotics II, 1993, p. 435-449. |
| J.C. Latombe, "Robot Motion Planning", The Kluwer International Series in Engineering and Computer Science, Kluwer Academic Publishers, 1991. |
| J.D. Moon, D.W. Cho, "A component mode synthesis applied to mechanisms for an investigation of vibration", Journal of Sound and Vibration; Department of Mechanical Engineering, Pohang Institute of Science and Technology, Pohang, Korea, 1992, p. 67-79. |
| J.L. Dallaway, R.M. Mahoney, R.D. Jackson, R.G. Gosine, An Interactive Robot Control Environment for Rehabilitation Applications, Robotica, 1993, p. 541-551. |
| J.T. Feddema, C.S.G. Lee, O.R. Mitchell, "Automatic selection of image features for visual servoing of a robot manipulator", Conf. IEEE Robotics and Automation (USA), 1989, p. 14-19. |
| J.T. Feddema, O.R. Mitchell, "Vision-Guided Servoing with Feature-Based Trajectory Generation", IEEE Transaction on Robotics and Automation, 1989. |
| Jacobsen, S.C., Iversen, E.K., Knutti, D. F., Johnson, R.T., Biggers, K. B., "Design of the Utah/MIT Dexterous Hand", Conf. on Robotics and Automation, 1986. |
| Jae-Hun Jung, Yong-Hyun Jung, Jong-Mo Kim, Suck-Gyu Lee, Dal-Hae Lee, Motion Control of Autonomous Mobile Robot With Fuzzy Algorithm, Yeungnam Univ., 1993, p. 362-365. |
| James K. Mills, Hybrid Actuator for Robot Manipulators: Design, Control and Performance, Robotics and Automation, IEEE Conference, 1993, p. 19-38. |
| Jean-Jacques E. Slotine, Weiping Li, "Composite adaptive control of robot manipulators", Automatica; Nonlinear Systems Laboratory, Massachusetts Institute of Technology, Cambridge, MA 02139, U.S.A., 1989, p. 509-519. |
| Jeong Park, Hoe-Young Yoo, The Study of the Method of Position Control for the One-Link Flexible Robot Arm, 1993, p. 57-60. |
| Jianguo Fu, Naresh K. Sinha, "An iterative learning scheme for motion control of robots using neural networks: A case study", Journal of Intelligent & Robotic Systems, 1993, p. 375-398. |
| Jin-Geol Kim, A Study on the Robust Digital Tracking Control of a Robot With Flexible Joints, Journal of the Korean Society of Precision Engineering , 1992, p. 92-100. |
| Jin-Seob Choi, Dong-Won Kim, Sung-Mo Yang, A Study on the Pseudoinverse Kinematic Motion Control of 6-Axis Arc Welding Robot, Journal of the Korean Society of Precision Engineering , 1993, p. 170-177. |
| Joachim O. Berg, Path and Orientation Accuracy of Industrial Robots, The International Journal of Advanced Manufacturing Technology, 1993, p. 29-33. |
| John G. Hunter, Jonathan M. Sackier, Minimally Invasive Surgery, McGraw Hill, Inc., Health Professions Division, 1993. |
| John T. Feddema, C. S. George Lee, "Adaptive Image Feature Prediction and Control for Visual Tracking with a Hand-eye Coordinated Camera", IEEE Transactions on Systems, man, and Cybernetics, 1990, p. 1172-1183. |
| Jong-Wu Moon, Jeung Park, Chong-Xuk Park, Adaptibe Control of a Flexible Robot Manipulator-Using ARMA Prediction Model, 1992, p. 122-127. |
| Junji Furusho, Hiroshi Nagao, Naruse Makoto, "Multivariable Root Loci of Control Systems of Robot Manipulators with Flexible Driving Systems* : Distortion Feedback", JSME International Journal, 1992, p. 65-73. |
| K. Periyasamy, V. S. Alagar, T. D. Bui, "A formal framework for design and verification of robotic agents", Journal of Intelligent & Robotic Systems, 1993, p. 173-200. |
| Kenneth L. Hillsley, Stephen Yurkovich, Vibration Control of a Two-Link Flexible Robot Arm, Dynamics and Control, 1993, p. 261-280. |
| Korikov, Anatoliim, Syriamkin, Vladimir, Titov, Vitaliis, "Correlation robot vision systems", 1990, p. 264. |
| Kubota, T., Sato, M., Harashima, F., "Visual Control of Robotic Manipulator Based on Neural Networks", Industrial Electronics, IEEE, 1992, p. 490-496. |
| L. Behera, M. Gopal, Santanu Chaudhury, "Trajectory tracking of robot manipulator using Gaussian networks", Dept. of Electrical Engineering, Indian Institute of Technology, Delhi, Hauz Khas, New Delhi 110 016, India, 1993. |
| L. Dade Lunsford, M.D., "Stereotactic Exploration of the Brain in the Era of Computed Tomography", Surg. Neurol, 1984, p. 222-230. |
| L.E. Weiss, "Dynamic Visual Servo Control of Robots: an adaptive image-based approach, Technical Report", Carnegie Mellon, 1984. |
| L.E. Weiss; A.C. Sanderson, "Dynamic Sensor-based Control of Robots with Visual Feedback", IEEE Journal of Robotics and Automation, 1987, p. 5. |
| Lee E. Weiss, Arthur C. Sanderson, Charles P. Neuman, "Dynamic Sensor Based Control of Robots with Visual Feedback", IEEE Journal of Robotics and Automation, 1987, p. 404-417. |
| M. Caporali et al., "Design and Construction of a Five Fingered Robotic Hand", Robotics Age, 1984, p. 14-20. |
| M. Peter Heilburn, M.D., J., Preliminary Experience With Brown-Robert-Wells (BRW) Computerized Tomography Stereotaxis Guidance System, Neurourgery, 1983, p. 217-221. |
| M. Wu, B. C. Jiang, Y. R. Shiau, Controlling a Robot's Position Using Neural Networks, The International Journal of Advanced Manufacturing Technology, 1993, p. 216-226. |
| M.M. Bayoumi, "Adaptive Control of Robots with Rigid Links: A Status Report", Department of Electrical Engineering, Queen's University, Ontario, Canada (IEEE), 1993, p. 232-236. |
| Melzer A, Schurr MO, Kunert W, Buess G, Voges U, Meyer JU., Intelligent Surgical Instrument System ISIS. Concept and Preliminary Experimental Application of Components and Prototypes, Endosc Surg Allied Technol., 1993, p. 165-170. |
| Michael L. Rhodes, "Computer Graphics and an Interactive Stereotactic System for CT-Aided Neurosurgery", IEEE Computer Graphics and Application, Computer Graphics in Medicine & Biology, 1983, p. 31-37. |
| Michael L. Thodes, Ph.D, "Stereotactic Neurosurgery Using 3D Image Data From Computed Tomography", Journal of Medical Systems, 1982, p. 106-118. |
| Mills, J.K., "Hybrid actuation of robotic manipulators: an integral manifold control approach", Intelligent Control, IEEE, 1990, p. 817-823. |
| Morris R. Driels, W. Swayze, S. Potter, Full-Pose Calibration of a Root Manipulator Using a Coordinate-Measuring Machine, The International Journal of Advanced Manufacturing Technology, 1993, p. 34-41. |
| Nakamura, H., Shimada, T., Kobayashi, H., "An inspection robot for feeder cables-snake like motion control", Industrial Electronics, Control, Instrumentation, and Automation, 1992, p. 849-852. |
| Nam Gu Lee, Chong Soo Lee, Chong Kug Park, Dynamic Hybrid Position/Force Controller for Two Copperating Robots, 1992, p. 103-107. |
| Ng, W.S. Davies, B.L. Hibberd, R.D. Timoney, A.G., Robotic Surgery, Engineering in Medicine and Biology Magazine, 1993, p. 120-125. |
| Nicholas Jackson, The Story Behind the Russian Robot Collie Patent Sketches, The Atlantic, 2011. |
| Nicolay V. Kim, Algorithms of Observation Information Synthesis, International Conference on Electronics, Informations and Communications, 1993, p. 120-124. |
| Nobuyuki Furuya, Masatomo Matubara, An Algorithm of Motor Control by Software Servo System (2nd Report): Application to 4-Axes Scara Robot, Journal of the Japan Society of Precision Engineering , 1993, p. 423-428. |
| Oh Joong Chan, Jong Sik Boong, Choi Ko Bong, Kwon Key Jo, Design a Mobile Robot's Tracking Control System Using Fuzzy Theory, Sung Kyun Kwan Univ., 1992, p. 112-115. |
| Orbitran Wafer Handling Robot, Genmark Automation, 1989, p. 2,3,4. |
| P. Kazanzides, J. Zuhars, B. Mittelsstadt, R.H. Taylor, "Force sensing and control for a surgical robot", IEEE conference on Robotics and Automation (Nice), 1992, p. 612-617. |
| P. Rives, F. Chaumette, B. Espiau, "Visual Servoing Based on a Task Function Approach", International Symposium on Experimental Robotics (Canada), 1989. |
| Ph, Cinquin, et. al, IGOR: Image Guided Operating Robot. Methodology, Medical Applications, Results, Innov. Tech. Biol. Med., 1992, p. 1048-1049. |
| Pierre J. de Smet, Eugene I. Rivin, Yongle Lou, D. Kegg, "Robot Performance as Influenced by Mechanical System", CIRP Annals-Manufacturing Technology, 1990, p. 383-386. |
| Pietro Fanghella, Carlo Galletti, An Approach to Symbolic Kinematics of Multiloop Robot Mechanisms, RoManSy9, 1993, p. 33-40. |
| Potemkin, E., Astafurov, P., Osipov, A., Malenkov, M., Mishkinyuk, V., Sologub, P., "Remote-controlled robots for repair and recovery in the zones of high radiation levels", Robotics and Automation, IEEE, 1992, p. 80-82. |
| R.H. Taylor, et. al, A Model-Based Optimal Planning and Execution System With Active Sensing and Passive Manipulation for Augmentation of Human-Precision in Computer-Integrated Surgery, Lecture Notes in Control and Information Sciences; Experimental Robo. |
| R.H. Taylor, et. al, Augmentation of Human Precision in Computer-Integrated Surgery, Innov. Tech. Biol. Med., 1992. |
| Rafiqul I. Noorani, "Microcomputer-based robot arm control", Mathematical and Computer Modelling, 1990, p. 450-455. |
| Rajac, "Variable-Pitch Transfer Mechanism", IBM Technical Disclosure Bulletin, 1974. |
| Reynolds, O., "On Efficiency of Belts or Straps as Communicators of Work", The Engineer, 1874, p. 396. |
| Robots Take a Hold on Production, 1982, p. 122-129. |
| Rocheleau, D.N., Crane, C.D., III, "Development of a graphical interface for robotic operation in a hazardous environment", Systems, Man, and Cybernetics, 1991, p. 1077-1081. |
| S. Hayati, M. Mirmirani, "Improving the Absolute positioning Accuracy of Robot Manipulators", Journal of Robotic Systems, 1986, p. 397-413. |
| S. L. Shishkin, "Adaptive control of a biped robot walking across a horizontal plane", International Journal of Adaptive Control and Signal Processing, 1992, p. 259-264. |
| S. Lavallee, J. Troccaz, L. Gaborit, A.L. Benabid, D. Hoffman, "Image guided operating robot: A clinical application in stereotactic neurosurgery", IEEE Conference on Robotics and Automation (Nice), 1992. |
| S. Nicosia, A. Tornambè, P. Valigi, "State estimation in robotic manipulators: Some experimental results", Journal of Intelligent & Robotic Systems 1993, p. 321-351. |
| S. Zenkevich, A. Maximov, A. Nazarova, A . Korshunov, "Control of robot-based assembly cell", Lecture Notes in Control and Information Sciences , 1993, p. 418-427. |
| S.D. Park, K.W. Jeong, W.K. Chung, Y. Youm, Development of a Control Method Using Both Electric and Pneumatic Actuators For a Heavy Load Handing Robot, Journal of the Korean Society of Precision Engineering , 1993, p. 14-21. |
| Sadegh N, Hopowitz R, "Stability and robustness analysis of a class of adaptive controller for robotic manipulator", The International Journal of Robotics Research, 1990. |
| Salisburg, Jr., J. Kenneth, "Kinematic and Force Analysis of Articulated Hands", 1982. |
| Salisbury, Jr., J. K., "Design and Control of an Articulated Hand", International Symposium on Dessign and Synthesis, 1984. |
| Sang-Gwon Lim, Jin-Won Lee, Yong-Ky Moon, Dong-Lyeol Jeon, Sang-Hyun Jin, In-Hwan Oh, Dong-Il Kim, Sung-Kwun Kim, Development of AC Servo Motor Controller for Industrial Robot and CNC Machine System, Control R/D Team, Samsung Electronics, 1992, p. 1211-1214. |
| Shaheen Ahmad, Mohamed Zribi, Lyapunov-Based Control Design for Multiple Robots Handling a Common Object, Dynamics and Control, 1993, p. 127-157. |
| Shapiro, "Digital Technology Enables Robots to See", Computer Design, 1978. |
| Shevtsova N. A., Faure A., Klepatch A.A., Podladchikova L.N., Rybak I.A. , Model of Foveal Visual Preprocessor, Intelligent Robots and Computer Vision XIV: Algorithms, Techniques, Active Vision, and Materials Handling, 1995, p. 588-596. |
| Smith, G. A. et al., "Surgery", 1950, p. 817-821. |
| Stefano Chiaverini, Bruno Siciliano, Olav Egeland, Robot Control in Singular Configurations-Analysis and Experimental Results, Experimental Robotics II, 1993, p. 25-34. |
| Sung Do Chi, Seok Pil Lee, Wang Jae Lee, San Hui Park, Hierarchical Design of Intelligent Robot System, Hankuk Aviation Univ., Yonsel Univ., 1993, p. 213-216. |
| Swarup, M. Gopal, "Comparative study on linearized robot models", Journal of Intelligent & Robotic Systems, 1993, p. 287-300. |
| Swift, H. W., "Power Transmission by Belts: An Investigation of Fundamentals", The Institution of Mechanical Engineers, 1928. |
| Takashi Matsui, Mochizuki Yoshihiro, Effect of Positive Angular Velocity Feedback on Torque Control of Hydraulic Actuator, JSME international journal, 1992, p. 406-412. |
| Timopheev, A.V., Prokhorov, D.V., "Neural networks processing systems in recognition and control problems", Neuroinformatics and Neurocomputers; IEEE, 1992, p. 820-828. |
| Townsend, W.T., Salisbury, Jr. J. K., "The Effect of Coulomb Friction and Stiction on Force Control", Conf. on Robotics and Automation, 1987. |
| Troccaz, J. Lavallee, S. Hellion, E., "A passive arm with dynamic constraints: a solution to safety problems in medical robotics", Systems Engineering in the Service of Humans', Conference Proceedings, 1993, p. 166-171. |
| Vertut, J., Coiffet, P., "Teleoperations and Robotics Evolution and Development", Robot Technology, 1986, p. 191-194. |
| Vsevolod I. Astafyev Farus, Yakutsk, Russia Yuri M. Gorsky, "Homeostatics", Cybernetics and applied systems, 1992, p. 7-22. |
| W Szczepinski, "Theory of polyhedrons of positioning accuracy of manipulators", Mechanism and Machine Theory; Institute of Fundamental Technological Research, Polish Academy of Sciences, 00-049 Warsaw, Swietokrzyska 21, Poland, 1991, p. 697-709. |
| W Szczepiński, "Theory of polyhedrons of positioning accuracy of manipulators", Mechanism and Machine Theory; Institute of Fundamental Technological Research, Polish Academy of Sciences, 00-049 Warsaw, Swietokrzyska 21, Poland, 1991, p. 697-709. |
| Weiping Li, Jean-Jacques E. Slotine, "An indirect adaptive robot controller", Systems & Control Letters; Nonlinear Systems Laboratory, Massachusetts Institute of Technology Cambridge, MA 02139, U.S.A., 1989, p. 259-266. |
| Xu Hongbin, "Stability and performance robustness analysis of hybrid control for robot manipulators", Journal of UEST of China, vol. 22 No. 5, Oct. 1993, p. 501-505. |
| Y. Edan, B. A. Engel, G. E. Miles, "Intelligent control system simulation of an agricultural robot", Journal of Intelligent & Robotic Systems, 1993, p. 267-284. |
| Yalou Huang; Guizhang Lu, "Force Analysis and Hybrid Control Scheme for Multiple Robot Manipulators", Artificial Intelligence and Robotics Research Laboratories; Dept of Computer and System Sciences; Nankai University, China (Proceedings of the 1993 IEEE/RSJ International Conference on Intelligent Robots and Systems in Japan), 1993, p. 1530-1534. |
| Yong-Deuk Seo, Dong-Joon Choi, Ki-Sang Hong, Hong Joeng, The Development of Intelligent Robot Using Vision and Speech Recognition System, Department of EE, Postech, 1993, p. 39-44. |
| Yoon Seok Chang, Hakil Kim, Motion Estimation of Moving Objects Using Frequency Domain Transforms, 1992, p. 92-99. |
| Young Hood Joo, Seok Joo Yi, San Yeob Cha, Kwang Bang Woo, Hyung Woo Yoon, Gun Woong Hae, Sung Kwun Kim, A Study on Optimal Navigation of Autonomous Mobile Robot, Production of Eng. Division, Samsung Electronics Co., 1992, p. 128-133. |
| Yozo Fujino, Pennung Warnitchai, B.M. Pacheco, Active Stiffness Control of Cable Vibration, Journal of Applied Mechanics, 1993, p. 948-953. |
| ZH Luo , "Theoretical and Experimental Study on Control of Flexible Robot Arms Using Direct Strain Feedback", 1992. |
| Zhao Yu-shan Gu Liang-xian , Generalized Dynamic Model for Multibodies Manipulator, 1993. |
| Zheng Nanning Wang Long Hu chao Liu Jianqin, "Improved BP Neural Net and Its Application to Handwritten Numeral Recognition", 1992. |
Cited By (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10004568B2 (en) | 2013-12-30 | 2018-06-26 | Medrobotics Corporation | Articulating robotic probes |
| US12082776B2 (en) | 2015-09-03 | 2024-09-10 | Neptune Medical Inc. | Methods for advancing a device through a gastrointestinal tract |
| US11219351B2 (en) | 2015-09-03 | 2022-01-11 | Neptune Medical Inc. | Device for endoscopic advancement through the small intestine |
| US11122971B2 (en) | 2016-08-18 | 2021-09-21 | Neptune Medical Inc. | Device and method for enhanced visualization of the small intestine |
| US12336695B2 (en) | 2016-08-18 | 2025-06-24 | Neptune Medical Inc. | Device and method for enhanced visualization of the small intestine |
| US11944277B2 (en) | 2016-08-18 | 2024-04-02 | Neptune Medical Inc. | Device and method for enhanced visualization of the small intestine |
| US12295550B2 (en) | 2017-07-20 | 2025-05-13 | Neptune Medical Inc. | Dynamically rigidizing overtube |
| WO2019090288A1 (en) | 2017-11-06 | 2019-05-09 | Medrobotics Corporation | Robotic system wiht articulating probe and articulating camera |
| USD874655S1 (en)* | 2018-01-05 | 2020-02-04 | Medrobotics Corporation | Positioning arm for articulating robotic surgical system |
| US12059128B2 (en) | 2018-05-31 | 2024-08-13 | Neptune Medical Inc. | Device and method for enhanced visualization of the small intestine |
| US11135398B2 (en) | 2018-07-19 | 2021-10-05 | Neptune Medical Inc. | Dynamically rigidizing composite medical structures |
| US11478608B2 (en) | 2018-07-19 | 2022-10-25 | Neptune Medical Inc. | Dynamically rigidizing composite medical structures |
| US11554248B1 (en) | 2018-07-19 | 2023-01-17 | Neptune Medical Inc. | Rigidizing devices |
| US11724065B2 (en) | 2018-07-19 | 2023-08-15 | Neptune Medical Inc. | Nested rigidizing devices |
| US12311122B2 (en) | 2018-07-19 | 2025-05-27 | Neptune Medical Inc. | Rigidizing overtube with hemostasis valve |
| US12285571B2 (en) | 2018-07-19 | 2025-04-29 | Neptune Medical Inc. | Methods of performing vascular procedures using a rigidizing device |
| US11813028B2 (en)* | 2018-09-27 | 2023-11-14 | Eped, Inc. | Active-detection self-propelled artificial intelligence surgical navigation cart |
| US20200100846A1 (en)* | 2018-09-27 | 2020-04-02 | Eped, Inc. | Active-detection self-propelled artificial intelligence surgical navigation cart |
| US12193637B2 (en) | 2019-04-17 | 2025-01-14 | Neptune Medical Inc. | External working channels |
| US11793392B2 (en) | 2019-04-17 | 2023-10-24 | Neptune Medical Inc. | External working channels |
| US12329473B2 (en) | 2019-04-17 | 2025-06-17 | Neptune Medical Inc. | Dynamically rigidizing composite medical structures |
| US11744443B2 (en) | 2020-03-30 | 2023-09-05 | Neptune Medical Inc. | Layered walls for rigidizing devices |
| US12121677B2 (en) | 2021-01-29 | 2024-10-22 | Neptune Medical Inc. | Devices and methods to prevent inadvertent motion of dynamically rigidizing apparatuses |
| US12102289B2 (en) | 2022-04-27 | 2024-10-01 | Neptune Medical Inc. | Methods of attaching a rigidizing sheath to an endoscope |
| US11937778B2 (en) | 2022-04-27 | 2024-03-26 | Neptune Medical Inc. | Apparatuses and methods for determining if an endoscope is contaminated |
| US12324565B2 (en) | 2022-04-27 | 2025-06-10 | Neptune Medical Inc. | Methods of attaching a rigidizing sheath to an endoscope |
| US12330292B2 (en) | 2023-09-28 | 2025-06-17 | Neptune Medical Inc. | Telescoping robot |
Also Published As
| Publication number | Publication date |
|---|---|
| AU2020200832A1 (en) | 2020-02-27 |
| CN108262741A (en) | 2018-07-10 |
| IL233136A0 (en) | 2014-07-31 |
| AU2017254957A1 (en) | 2017-11-30 |
| US20170015007A1 (en) | 2017-01-19 |
| US20180161992A1 (en) | 2018-06-14 |
| EP2793729A4 (en) | 2015-08-12 |
| CA2858831A1 (en) | 2013-06-27 |
| JP2019022734A (en) | 2019-02-14 |
| AU2012358829A1 (en) | 2014-07-10 |
| EP2793729B1 (en) | 2019-04-17 |
| KR20140104502A (en) | 2014-08-28 |
| US20140318299A1 (en) | 2014-10-30 |
| US9821477B2 (en) | 2017-11-21 |
| JP2015507492A (en) | 2015-03-12 |
| CN104470455A (en) | 2015-03-25 |
| JP6449018B2 (en) | 2019-01-09 |
| EP2793729A1 (en) | 2014-10-29 |
| AU2012358829B2 (en) | 2017-08-03 |
| CN104470455B (en) | 2018-03-06 |
| WO2013096610A1 (en) | 2013-06-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9821477B2 (en) | Stabilizing apparatus for highly articulated probes with link arrangement, methods of formation thereof, and methods of use thereof | |
| US12042120B2 (en) | Methods and apparatus to shape flexible entry guides for minimally invasive surgery | |
| US9572628B2 (en) | Highly articulated probes with anti-twist link arrangement, methods of formation thereof, and methods of performing medical procedures | |
| US8784404B2 (en) | Flexible wrist-type element and methods of manufacture and use thereof | |
| DE102019201277A1 (en) | Device for guiding a medical flexible shaft | |
| US20100241136A1 (en) | Instrument positioning/holding devices | |
| EP3089696A1 (en) | Articulated robotic probes |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| AS | Assignment | Owner name:MEDROBOTICS CORPORATION, MASSACHUSETTS Free format text:ASSIGNMENT OF ASSIGNORS INTEREST;ASSIGNORS:OYOLA, ARNOLD E;ANDERSON, ROBERT;JOHNSTON, GABRIEL A.;AND OTHERS;SIGNING DATES FROM 20131121 TO 20140605;REEL/FRAME:033088/0510 | |
| STCF | Information on status: patent grant | Free format text:PATENTED CASE | |
| AS | Assignment | Owner name:MEDROBOTICS CORPORATION, MASSACHUSETTS Free format text:ASSIGNMENT OF ASSIGNORS INTEREST;ASSIGNORS:OYOLA, ARNOLD E;ANDERSON, ROBERT;JOHNSTON, GABRIEL;AND OTHERS;SIGNING DATES FROM 20131121 TO 20140605;REEL/FRAME:042539/0315 | |
| AS | Assignment | Owner name:VENTURE LENDING & LEASING VIII, INC., CALIFORNIA Free format text:SECURITY INTEREST;ASSIGNOR:MEDROBOTICS CORPORATION;REEL/FRAME:046348/0878 Effective date:20180608 Owner name:VENTURE LENDING & LEASING IX, INC., CALIFORNIA Free format text:SECURITY INTEREST;ASSIGNOR:MEDROBOTICS CORPORATION;REEL/FRAME:046348/0878 Effective date:20180608 | |
| MAFP | Maintenance fee payment | Free format text:PAYMENT OF MAINTENANCE FEE, 4TH YR, SMALL ENTITY (ORIGINAL EVENT CODE: M2551); ENTITY STATUS OF PATENT OWNER: SMALL ENTITY Year of fee payment:4 | |
| AS | Assignment | Owner name:ENDOBOTICS, LLC, DELAWARE Free format text:DEFAULT JUDGMENT;ASSIGNOR:MEDROBOTICS CORPORATION;REEL/FRAME:056451/0676 Effective date:20201124 | |
| FEPP | Fee payment procedure | Free format text:MAINTENANCE FEE REMINDER MAILED (ORIGINAL EVENT CODE: REM.); ENTITY STATUS OF PATENT OWNER: SMALL ENTITY | |
| LAPS | Lapse for failure to pay maintenance fees | Free format text:PATENT EXPIRED FOR FAILURE TO PAY MAINTENANCE FEES (ORIGINAL EVENT CODE: EXP.); ENTITY STATUS OF PATENT OWNER: SMALL ENTITY | |
| STCH | Information on status: patent discontinuation | Free format text:PATENT EXPIRED DUE TO NONPAYMENT OF MAINTENANCE FEES UNDER 37 CFR 1.362 | |
| FP | Lapsed due to failure to pay maintenance fee | Effective date:20240614 |