US7853356B2 - Method for optimizing a robot program and a robot system - Google Patents
Method for optimizing a robot program and a robot systemDownload PDFInfo
- Publication number
- US7853356B2 US7853356B2US11/279,764US27976406AUS7853356B2US 7853356 B2US7853356 B2US 7853356B2US 27976406 AUS27976406 AUS 27976406AUS 7853356 B2US7853356 B2US 7853356B2
- Authority
- US
- United States
- Prior art keywords
- robot
- control system
- controller
- system parameters
- program
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active, expires
Links
Images



Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1656—Programme controls characterised by programming, planning systems for manipulators
- B25J9/1671—Programme controls characterised by programming, planning systems for manipulators characterised by simulation, either to verify existing program or to create and verify new program, CAD/CAM oriented, graphic oriented programming systems
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1602—Programme controls characterised by the control system, structure, architecture
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/36—Nc in input of data, input key till input tape
- G05B2219/36252—Generate machining program based on a simulation to optimize a machine parameter
Definitions
- the present inventionrelates generally to a method and an apparatus for modifying a robot control program to meet performance objectives.
- a robot controllerconnects to an external computing device such as a personal computer through communication link.
- the external devicee.g. a personal computer or “PC” accesses the memory area of robot controller.
- User programs stored in the memory areacan therefore be manipulated by the external device.
- the main concept of this prior art deviceis for either connecting multiple robots to transfer user programs or for data storage purposes. There is no real-time interaction between the robot controller and the external computing device for path performance optimization.
- the present inventionconcerns a method and an apparatus for robot controller operation optimization.
- the present inventiondoes not only use a communication channel to connect the robot controller and the external computing device (a general PC), but makes use of the CPU power of the external PC to analyze and optimize the robot path real-time.
- This external PCbecomes a highly flexible, re-configurable, and yet powerful second processor for the robot controller.
- the method and apparatus according to the present inventionare extremely useful for small shape cutting/generation because the quality of these types of processes is tedious and time-consuming to examine and verify. Also, the method and apparatus can optimize robot path and cycle time for load-unload and other material handling applications successfully. Furthermore, the method and apparatus lay the perfect groundwork for extended robot optimization in other applications such as palletizing, spot welding, etc.
- FIG. 1is a block diagram of a robot program optimization apparatus in accordance with the present invention
- FIG. 2is block diagram of the robot controller shown in FIG. 1 ;
- FIG. 3is a block diagram of the external personal computer shown in FIG. 1 ;
- FIG. 4is a flow diagram of the method according to the present invention.
- a robot programis developed and occasionally optimized independently of the robot system to meet some performance objectives such as higher accuracy or better cycle time.
- the programis executed on different robots, that are not usually exactly identical, the robots' performances usually vary and some may not meet the desired objectives.
- This variationis attributed to the need of different manipulators for different “system parameters” such as acceleration time, over-current protection limits, servo loop gains, coulomb friction parameters, integration gains, spring constants, etc, that are usually fixed for specific manipulator models.
- the present inventionrecognizes that differences between manipulators and operating conditions affect robot performance and provides a method to optimize the robot program as well as the system parameters according to the robot system (control and manipulator) and the operating conditions.
- the robot programwhich may be developed in traditional ways, is executed by the robot system for which certain parameters, usually encoder positional data and motor current data, are monitored and communicated during robot operation to a secondary processor for optimization.
- the secondary processorapplies optimization routines to meet predetermined objectives, and modifies not only the robot program but also the control system parameters.
- the optimizationtakes into consideration the overall robot model, not just individual drive axes, and monitors the trend of specific composites of performance parameters to arrive at optimum control system parameters. This process is repeated while the robot is operational until the optimization objectives are met at which time the program is finalized and the system parameters are set for productive operation.
- the related prior artincludes offline programming in which the robot program is modified using a secondary processor, usually offline, to meet certain objectives.
- the modificationsare done independently of the control system parameters and are not checked in real-time against actual performance. Accordingly, the same program may be executed differently by different manipulators or by the same manipulator under different operating conditions.
- Learning controlalso modifies the robot program in real-time and may modify some control system parameters. However, in learning control optimizing iterations are run on an interval by interval basis where the state condition of the servo system changes with risk of instability. With its inherent slow conversion process only a few parameters can be iterated, usually servo gains and damping coefficients.
- the present inventioniterates at a fixed state on the PC for faster conversion and no risk of instability. This also allows more control parameters to be optimized within a given time period, hence better optimization of performance.
- none of the prior art methodsaccommodate input from the motor current that is essential to avoid overloading the motors and degrading the durability of the robot. Neither do they accommodate changes in the spring constants hence compromising vibration performance of the robot.
- the present inventionuses an iterative approach to evaluate predictive changes to the control parameters on the PC, using the dynamic robot model. Unlike learning control which must use the actual robot to evaluate the effect of changes, the present invention can run the model on the PC many more times under the same conditions and only applies the change once an objective is attained. This fast iterative approach also avoids the risk of instability.
- the present inventioncombines the advantages of offline programming, where the program modifications can be run independently of the robot, with learning control where iterative operations lead to optimized parameters.
- learning controlthe iteration is run on an interval by interval basis where the state condition of the servo system changes with risk of instability, but the present invention iterates at a fixed state for faster conversion and no risk of instability.
- a change in one parametercan not be evaluated under the same dynamic state condition until the whole program has been executed, a very slow process.
- the approach of learning controlis compromised by making the evaluation on the following time interval under a new state condition. This makes stability of the iteration difficult to attain.
- Robot path optimizationis a CPU-intensive task and is highly dependent on the robot TCP position and robot arm configuration.
- the CPU in a robot controllerusually handles excessive tasks such as motion planning, program management, and memory management etc. Therefore, it has been difficult to achieve path optimization with the robot controller's main CPU in the past.
- the method and apparatus according to the present inventionprovide the feasible measure to make real-time robot path optimization possible.
- the main concept of this inventionis to interact an external computing device (a general PC) with a robot controller real-time.
- the feedback of motion performancecan be displayed to users on any PC with a network card through either a dedicated connection between the robot controller and the PC, or via a network.
- This visual displaycan provide useful information from the controller such as path deviation and cycle time with or without the actual process taking place.
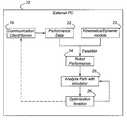
- FIG. 1An apparatus 10 for the optimization of a robot control program in accordance with the present invention.
- a first control means 11such as a robot controller
- a second control means 12such as a personal computer (PC)
- a communication link 13such as a computer network.
- the controller 11includes a motion system 14 , a servo system 15 and a communication client/server 16 .
- the PC 12includes a path analysis module 17 , an optimization module 18 and a communication client/server 19 .
- the motion system 14is connected to the servo system 15 and executes a control program to generate “motion commands” and “adjust servo system” signals to the servo system 15 .
- the servo system 15is connected to motors 20 of the robot and executes the motion commands to operate the motors 20 and receives feedback signals including motor current from the motors 20 .
- Multiple control programscan be stored in a user programs memory 21 connected to the communications server/client 16 .
- the motion system 14sends “performance data” to and receives “optimized data” from the communication server/client 16 .
- the “optimized data”is used to generate the “adjust servo system” signals to optimize performance.
- the external PC 12is shown in FIG. 3 as including the communication server/client 19 that is connected to deliver the “performance data” to a performance data memory 22 .
- a kinematic/dynamic models memory 23stores such models of the robot.
- the data memory 22 and the models memory 23are connected to a robot performance module 24 to “establish” the actual performance of the robot.
- the module 24is connected to an analyze path with simulator module 25 that utilizes simulation to analyze the robot path based upon the robot performance.
- the result from the module 25is provided to an optimization iteration module 26 .
- the “optimized data” from the module 26is returned to the simulator module 25 via a feedback loop to check the path based upon the “optimized data”.
- the “optimized data”is sent in real time to the motion system of FIG. 2 through the communication server/clients 19 and 16 of the communications link 13 .
- FIG. 4is a flow diagram for the method according to the present invention.
- the methodbegins at a “Connect to Robot Controller” instruction set 30 whereby the external PC 12 connects to the robot controller 11 as shown in FIG. 1 .
- the PCexecutes a “Synchronize with controller” instruction set 31 wherein the PC 12 is synchronized in real time with the operation of the robot controller 11 .
- the PC 12receives data from the controller 11 in a “Receive performance data from controller” instruction set 32 .
- the execution of the instruction set 31also causes execution of a “Create kinematic/dynamic simulator” instruction set 33 .
- the performance data received in the step 32 and the simulator created in the step 33are used to execute an “Analyze robot performance” instruction set 34 .
- the step 34leads to a “User specifies optimization objectives and constraints” instruction set 35 .
- the steps 33 and 35lead to an “Optimize using user program and simulator” instruction set 36 that generates a potential optimized program.
- “Satisfy objectives?” decision point 37if the optimized program does not satisfy the user specified objectives, the method branches at “N” to return to the optimizer step 36 . If the optimized program does satisfy the user specified objectives, the method branches at “Y” to a “Transmit necessary system parameters and/or user programs back to controller” instruction set 38 and the optimization process is complete. Now the robot controller 11 can execute the optimized program and/or change the control system parameters.
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Automation & Control Theory (AREA)
- Manipulator (AREA)
Abstract
Description
Claims (16)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/279,764US7853356B2 (en) | 2006-04-14 | 2006-04-14 | Method for optimizing a robot program and a robot system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/279,764US7853356B2 (en) | 2006-04-14 | 2006-04-14 | Method for optimizing a robot program and a robot system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| US20070244599A1 US20070244599A1 (en) | 2007-10-18 |
| US7853356B2true US7853356B2 (en) | 2010-12-14 |
Family
ID=38605858
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US11/279,764Active2028-10-29US7853356B2 (en) | 2006-04-14 | 2006-04-14 | Method for optimizing a robot program and a robot system |
Country Status (1)
| Country | Link |
|---|---|
| US (1) | US7853356B2 (en) |
Cited By (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20070168100A1 (en)* | 2006-01-18 | 2007-07-19 | George Danko | Coordinated joint motion control system with position error correction |
| US20090099738A1 (en)* | 2001-08-31 | 2009-04-16 | George Danko | Coordinated joint motion control system |
| US20110046780A1 (en)* | 2009-08-18 | 2011-02-24 | Noel Wayne Anderson | Distributed robotic guidance |
| US20110046784A1 (en)* | 2009-08-18 | 2011-02-24 | Noel Wayne Anderson | Asymmetric stereo vision system |
| US9119655B2 (en) | 2012-08-03 | 2015-09-01 | Stryker Corporation | Surgical manipulator capable of controlling a surgical instrument in multiple modes |
| US9226796B2 (en) | 2012-08-03 | 2016-01-05 | Stryker Corporation | Method for detecting a disturbance as an energy applicator of a surgical instrument traverses a cutting path |
| US9480534B2 (en) | 2012-08-03 | 2016-11-01 | Stryker Corporation | Navigation system and method for removing a volume of tissue from a patient |
| CN106371405A (en)* | 2015-07-24 | 2017-02-01 | 西门子公司 | Automatic optimization system for servo driver, servo driver, and automatic optimization debugging method for servo driver |
| US9616565B2 (en) | 2012-06-26 | 2017-04-11 | Abb Schweiz Ag | Adjusting parameters of a dynamical robot model |
| US9682476B1 (en) | 2015-05-28 | 2017-06-20 | X Development Llc | Selecting robot poses to account for cost |
| US9724826B1 (en) | 2015-05-28 | 2017-08-08 | X Development Llc | Selecting physical arrangements for objects to be acted upon by a robot |
| US9753453B2 (en) | 2012-07-09 | 2017-09-05 | Deep Learning Robotics Ltd. | Natural machine interface system |
| US9820818B2 (en) | 2012-08-03 | 2017-11-21 | Stryker Corporation | System and method for controlling a surgical manipulator based on implant parameters |
| US9921712B2 (en) | 2010-12-29 | 2018-03-20 | Mako Surgical Corp. | System and method for providing substantially stable control of a surgical tool |
| US10035266B1 (en) | 2016-01-18 | 2018-07-31 | X Development Llc | Generating robot trajectories using a real time trajectory generator and a path optimizer |
| US10836038B2 (en) | 2014-05-21 | 2020-11-17 | Fanuc America Corporation | Learning path control |
| US20210245364A1 (en)* | 2018-04-25 | 2021-08-12 | Abb Schweiz Ag | Method And Control System For Controlling Movement Trajectories Of A Robot |
| US11202682B2 (en) | 2016-12-16 | 2021-12-21 | Mako Surgical Corp. | Techniques for modifying tool operation in a surgical robotic system based on comparing actual and commanded states of the tool relative to a surgical site |
| US11325263B2 (en)* | 2018-06-29 | 2022-05-10 | Teradyne, Inc. | System and method for real-time robotic control |
| US20230338111A1 (en)* | 2014-10-30 | 2023-10-26 | Intuitive Surgical Operations, Inc. | System and method for an articulated arm based tool guide |
| US20240240939A1 (en)* | 2020-07-09 | 2024-07-18 | Siemens Aktiengesellschaft | Method and Device for Analyzing the Surface of a Workpiece |
Families Citing this family (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8095238B2 (en)* | 2006-11-29 | 2012-01-10 | Irobot Corporation | Robot development platform |
| CN202011020U (en) | 2008-05-21 | 2011-10-19 | Abb技术公司 | System for controlling industrial robots according to motion control parameter sets |
| DE112008003963B4 (en)* | 2008-08-12 | 2016-11-24 | Abb Technology Ltd. | System and method for off-line programming of an industrial robot |
| EP2169491B1 (en)* | 2008-09-27 | 2013-04-10 | TRUMPF Werkzeugmaschinen GmbH + Co. KG | Support system and method for optimising process parameters and/or regulating parameters |
| EP2355956B1 (en)* | 2008-11-19 | 2012-08-01 | ABB Technology Ltd | A method and a device for optimizing a programmed movement path for an industrial robot |
| US9108316B2 (en)* | 2008-12-10 | 2015-08-18 | Abb Research Ltd. | Method and system for in-production optimization of the parameters of a robot used for assembly |
| US20110046836A1 (en)* | 2009-08-18 | 2011-02-24 | Noel Wayne Anderson | Modular and scalable positioning and navigation system |
| DE102009060062A1 (en)* | 2009-12-22 | 2011-06-30 | Weber Maschinenbau GmbH Breidenbach, 35236 | Method for optimizing the speed of a robot |
| DE102010004473A1 (en)* | 2010-01-13 | 2011-07-14 | KUKA Laboratories GmbH, 86165 | System of development environments and machine controls |
| DE102010008240B4 (en)* | 2010-02-17 | 2015-10-15 | Siemens Aktiengesellschaft | Method for operating a multi-axis, preferably six-axis, robot |
| DE102011011542B4 (en)* | 2011-02-17 | 2016-05-25 | Convergent Information Technologies Gmbh | Method for automated programming and optimization of robotic workflows |
| TW201245931A (en)* | 2011-05-09 | 2012-11-16 | Asustek Comp Inc | Robotic device |
| DE102011079117B4 (en) | 2011-07-14 | 2022-09-29 | Kuka Deutschland Gmbh | Method of programming a robot |
| CN104010774B (en)* | 2011-09-15 | 2017-10-13 | 康富真信息技术股份有限公司 | System and method for automatically generating robot programs |
| DK2760642T3 (en)* | 2011-09-28 | 2016-01-11 | Universal Robots As | Calibration and programming of robots |
| DE102012101497B4 (en)* | 2012-02-24 | 2016-05-19 | Convergent Information Technologies Gmbh | Robot-based working method |
| US10383765B2 (en) | 2012-04-24 | 2019-08-20 | Auris Health, Inc. | Apparatus and method for a global coordinate system for use in robotic surgery |
| US9785905B2 (en) | 2012-09-20 | 2017-10-10 | Abb Schweiz Ag | Overall equipment effectiveness of a robot cell |
| AU2013204965B2 (en)* | 2012-11-12 | 2016-07-28 | C2 Systems Limited | A system, method, computer program and data signal for the registration, monitoring and control of machines and devices |
| US10078712B2 (en)* | 2014-01-14 | 2018-09-18 | Energid Technologies Corporation | Digital proxy simulation of robotic hardware |
| DE102014112639C5 (en)* | 2014-09-02 | 2020-07-02 | Cavos Bagatelle Verwaltungs Gmbh & Co. Kg | System for creating control data sets for robots |
| US10499999B2 (en) | 2014-10-09 | 2019-12-10 | Auris Health, Inc. | Systems and methods for aligning an elongate member with an access site |
| US10668623B2 (en)* | 2015-05-29 | 2020-06-02 | Abb Schweiz Ag | Method and system for robotic adaptive production |
| DE102015218699A1 (en) | 2015-09-29 | 2017-03-30 | Bayerische Motoren Werke Aktiengesellschaft | Method for automatically configuring an external control system for controlling and / or regulating a robot system |
| DE102015218697A1 (en) | 2015-09-29 | 2017-03-30 | Bayerische Motoren Werke Aktiengesellschaft | Method for automatically configuring an external control system for controlling and / or controlling a robot system |
| WO2017054964A1 (en) | 2015-09-29 | 2017-04-06 | Bayerische Motoren Werke Aktiengesellschaft | Method for the automatic configuration of an external control system for the open-loop and/or closed-loop control of a robot system |
| US10296675B2 (en)* | 2015-12-30 | 2019-05-21 | Abb Schweiz Ag | System and method for determining dynamic motion data in robot trajectory |
| JP2017159429A (en)* | 2016-03-11 | 2017-09-14 | セイコーエプソン株式会社 | Robot control device, information processing device, and robot system |
| WO2017213183A1 (en)* | 2016-06-07 | 2017-12-14 | 三菱電機株式会社 | Abnormality diagnosis device and abnormality diagnosis method |
| EP3545371A4 (en) | 2016-11-23 | 2020-08-12 | ABB Schweiz AG | Method and apparatus for optimizing a target working line |
| CN116725667A (en) | 2017-06-28 | 2023-09-12 | 奥瑞斯健康公司 | System for providing positioning information and method for positioning an instrument within an anatomical structure |
| WO2019005696A1 (en) | 2017-06-28 | 2019-01-03 | Auris Health, Inc. | Electromagnetic distortion detection |
| US10464209B2 (en) | 2017-10-05 | 2019-11-05 | Auris Health, Inc. | Robotic system with indication of boundary for robotic arm |
| US10016900B1 (en) | 2017-10-10 | 2018-07-10 | Auris Health, Inc. | Surgical robotic arm admittance control |
| WO2020047065A1 (en)* | 2018-08-30 | 2020-03-05 | Veo Robotics, Inc. | System identification of industrial robot dynamics for safety-critical applications |
| JP7125745B2 (en)* | 2018-09-14 | 2022-08-25 | 学校法人早稲田大学 | ENVIRONMENTAL ADAPTABILITY REINFORCEMENT SYSTEM OF AUTONOMOUS WORK SUPPORT ROBOT, OPERATION SIMULATION DEVICE, AND THEREOF PROGRAM |
| EP4025921A4 (en) | 2019-09-03 | 2023-09-06 | Auris Health, Inc. | DETECTION AND COMPENSATION OF ELECTROMAGNETIC DISTORTION |
| US11351669B2 (en)* | 2019-10-29 | 2022-06-07 | Kyndryl, Inc. | Robotic management for optimizing a number of robots |
| EP4088882A1 (en)* | 2021-05-10 | 2022-11-16 | Hilti Aktiengesellschaft | Method of manipulating a construction object, construction robot system, and computer program product |
Citations (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4338672A (en) | 1978-04-20 | 1982-07-06 | Unimation, Inc. | Off-line teach assist apparatus and on-line control apparatus |
| US4433382A (en)* | 1981-07-20 | 1984-02-21 | Cincinnati Milacron Inc. | Apparatus for automatically adjusting the programmed location of a robot arm |
| US4763055A (en)* | 1986-11-20 | 1988-08-09 | Westinghouse Electric Corp. | Digital robot control having high performance servo control system |
| US4876494A (en)* | 1986-11-20 | 1989-10-24 | Unimation, Inc. | Position and velocity feedback system for a digital robot control |
| US4956594A (en)* | 1987-09-19 | 1990-09-11 | Fanuc Ltd. | Method of controlling a robot in accordance with load conditions |
| US5218709A (en)* | 1989-12-28 | 1993-06-08 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Special purpose parallel computer architecture for real-time control and simulation in robotic applications |
| US5313695A (en) | 1989-03-28 | 1994-05-24 | Renault Automation | Process and device for body assembly with lateral tools that can be interpositioned |
| US5327058A (en) | 1990-01-19 | 1994-07-05 | Tokico Ltd. | Method of control for an industrial robot |
| US5341458A (en)* | 1991-09-11 | 1994-08-23 | Honda Giken Kogyo Kabushiki Kaisha | Method of and system for generating teaching data for robots |
| US5465035A (en) | 1993-05-11 | 1995-11-07 | Quantum Corporation | Band limited control of a flexible structure using piecewise trigonometric input signals |
| US5796922A (en) | 1996-03-29 | 1998-08-18 | Weber State University | Trainable, state-sampled, network controller |
| US5875286A (en) | 1991-08-05 | 1999-02-23 | Bernstein; Steven A. | Automated tissue assay using standarized chemicals and packages |
| US5880956A (en) | 1994-08-12 | 1999-03-09 | Minnesota Mining And Manufacturing Company | Lead-through robot programming system |
| US6002104A (en)* | 1998-04-17 | 1999-12-14 | Lincoln Global, Inc. | Electric arc welder and controller therefor |
| US6011241A (en)* | 1998-02-25 | 2000-01-04 | Cybo Robots, Inc. | Method of adjusting weld parameters to compensate for process tolerances |
| US6175206B1 (en)* | 1997-05-12 | 2001-01-16 | Kawasaki Jukogyo Kabushiki Kaisha | Robot information processor |
| US6212466B1 (en) | 2000-01-18 | 2001-04-03 | Yamaha Hatsudoki Kabushiki Kaisha | Optimization control method for shock absorber |
| US6269284B1 (en)* | 1997-05-09 | 2001-07-31 | Kam C. Lau | Real time machine tool error correction using global differential wet modeling |
| US6327516B1 (en)* | 1999-11-09 | 2001-12-04 | Mitsubishi Denki Kabushiki Kaisha | Operation terminal and remote operation system for a robot |
| US6445964B1 (en)* | 1997-08-04 | 2002-09-03 | Harris Corporation | Virtual reality simulation-based training of telekinegenesis system for training sequential kinematic behavior of automated kinematic machine |
| JP2002292584A (en) | 2001-03-29 | 2002-10-08 | Nachi Fujikoshi Corp | Adjusting parameter setting method |
| US20020147528A1 (en)* | 2001-04-05 | 2002-10-10 | Fanuc Ltd. | Robot information processing system |
| US6560513B2 (en)* | 1999-11-19 | 2003-05-06 | Fanuc Robotics North America | Robotic system with teach pendant |
| US20040135534A1 (en)* | 2003-01-14 | 2004-07-15 | Cullen Christopher P. | Electric motor controller |
| US20040148268A1 (en) | 2001-02-28 | 2004-07-29 | Torsten Reil | Artificial multiped and motion controller therefor |
| US20040193321A1 (en) | 2002-12-30 | 2004-09-30 | Anfindsen Ole Arnt | Method and a system for programming an industrial robot |
| US6812665B2 (en)* | 2002-04-19 | 2004-11-02 | Abb Ab | In-process relative robot workcell calibration |
| US20040267404A1 (en) | 2001-08-31 | 2004-12-30 | George Danko | Coordinated joint motion control system |
| US20050027394A1 (en) | 2003-07-17 | 2005-02-03 | Stefan Graf | Method and system for controlling robots |
| US20050071048A1 (en)* | 2003-09-29 | 2005-03-31 | Fanuc Ltd. | Robot system |
| US20050143860A1 (en)* | 2003-12-26 | 2005-06-30 | Japan Aerospace Exploration Agency | Method of controlling redundant manipulator |
| US20050251290A1 (en)* | 2002-05-24 | 2005-11-10 | Abb Research Ltd | Method and a system for programming an industrial robot |
| US20060190136A1 (en)* | 2005-02-24 | 2006-08-24 | Paragon Technical Services, Inc. | Method and system for controlling a manipulator |
| US7194321B2 (en)* | 2004-10-29 | 2007-03-20 | Dynacity Technology (Hk) Limited | Modular multi-axis motion control and driving system and method thereof |
| US7525274B2 (en)* | 2003-03-28 | 2009-04-28 | Kuka Roboter Gmbh | Method and device for controlling a plurality of manipulators |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5327053A (en)* | 1992-08-12 | 1994-07-05 | Seagate Technology, Inc. | Apparatus and method for detecting rotor position in a sensorless and brushless DC motor |
- 2006
- 2006-04-14USUS11/279,764patent/US7853356B2/enactiveActive
Patent Citations (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4338672A (en) | 1978-04-20 | 1982-07-06 | Unimation, Inc. | Off-line teach assist apparatus and on-line control apparatus |
| US4433382A (en)* | 1981-07-20 | 1984-02-21 | Cincinnati Milacron Inc. | Apparatus for automatically adjusting the programmed location of a robot arm |
| US4763055A (en)* | 1986-11-20 | 1988-08-09 | Westinghouse Electric Corp. | Digital robot control having high performance servo control system |
| US4876494A (en)* | 1986-11-20 | 1989-10-24 | Unimation, Inc. | Position and velocity feedback system for a digital robot control |
| US4956594A (en)* | 1987-09-19 | 1990-09-11 | Fanuc Ltd. | Method of controlling a robot in accordance with load conditions |
| US5313695A (en) | 1989-03-28 | 1994-05-24 | Renault Automation | Process and device for body assembly with lateral tools that can be interpositioned |
| US5218709A (en)* | 1989-12-28 | 1993-06-08 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Special purpose parallel computer architecture for real-time control and simulation in robotic applications |
| US5327058A (en) | 1990-01-19 | 1994-07-05 | Tokico Ltd. | Method of control for an industrial robot |
| US5875286A (en) | 1991-08-05 | 1999-02-23 | Bernstein; Steven A. | Automated tissue assay using standarized chemicals and packages |
| US5341458A (en)* | 1991-09-11 | 1994-08-23 | Honda Giken Kogyo Kabushiki Kaisha | Method of and system for generating teaching data for robots |
| US5465035A (en) | 1993-05-11 | 1995-11-07 | Quantum Corporation | Band limited control of a flexible structure using piecewise trigonometric input signals |
| US5880956A (en) | 1994-08-12 | 1999-03-09 | Minnesota Mining And Manufacturing Company | Lead-through robot programming system |
| US5796922A (en) | 1996-03-29 | 1998-08-18 | Weber State University | Trainable, state-sampled, network controller |
| US6269284B1 (en)* | 1997-05-09 | 2001-07-31 | Kam C. Lau | Real time machine tool error correction using global differential wet modeling |
| US6175206B1 (en)* | 1997-05-12 | 2001-01-16 | Kawasaki Jukogyo Kabushiki Kaisha | Robot information processor |
| US6445964B1 (en)* | 1997-08-04 | 2002-09-03 | Harris Corporation | Virtual reality simulation-based training of telekinegenesis system for training sequential kinematic behavior of automated kinematic machine |
| US6011241A (en)* | 1998-02-25 | 2000-01-04 | Cybo Robots, Inc. | Method of adjusting weld parameters to compensate for process tolerances |
| US6002104A (en)* | 1998-04-17 | 1999-12-14 | Lincoln Global, Inc. | Electric arc welder and controller therefor |
| US6327516B1 (en)* | 1999-11-09 | 2001-12-04 | Mitsubishi Denki Kabushiki Kaisha | Operation terminal and remote operation system for a robot |
| US6560513B2 (en)* | 1999-11-19 | 2003-05-06 | Fanuc Robotics North America | Robotic system with teach pendant |
| US6212466B1 (en) | 2000-01-18 | 2001-04-03 | Yamaha Hatsudoki Kabushiki Kaisha | Optimization control method for shock absorber |
| US20040148268A1 (en) | 2001-02-28 | 2004-07-29 | Torsten Reil | Artificial multiped and motion controller therefor |
| JP2002292584A (en) | 2001-03-29 | 2002-10-08 | Nachi Fujikoshi Corp | Adjusting parameter setting method |
| US20020147528A1 (en)* | 2001-04-05 | 2002-10-10 | Fanuc Ltd. | Robot information processing system |
| US20040267404A1 (en) | 2001-08-31 | 2004-12-30 | George Danko | Coordinated joint motion control system |
| US6812665B2 (en)* | 2002-04-19 | 2004-11-02 | Abb Ab | In-process relative robot workcell calibration |
| US20050251290A1 (en)* | 2002-05-24 | 2005-11-10 | Abb Research Ltd | Method and a system for programming an industrial robot |
| US20040193321A1 (en) | 2002-12-30 | 2004-09-30 | Anfindsen Ole Arnt | Method and a system for programming an industrial robot |
| US20040135534A1 (en)* | 2003-01-14 | 2004-07-15 | Cullen Christopher P. | Electric motor controller |
| US7525274B2 (en)* | 2003-03-28 | 2009-04-28 | Kuka Roboter Gmbh | Method and device for controlling a plurality of manipulators |
| US20050027394A1 (en) | 2003-07-17 | 2005-02-03 | Stefan Graf | Method and system for controlling robots |
| US20050071048A1 (en)* | 2003-09-29 | 2005-03-31 | Fanuc Ltd. | Robot system |
| US20050143860A1 (en)* | 2003-12-26 | 2005-06-30 | Japan Aerospace Exploration Agency | Method of controlling redundant manipulator |
| US7194321B2 (en)* | 2004-10-29 | 2007-03-20 | Dynacity Technology (Hk) Limited | Modular multi-axis motion control and driving system and method thereof |
| US20060190136A1 (en)* | 2005-02-24 | 2006-08-24 | Paragon Technical Services, Inc. | Method and system for controlling a manipulator |
Non-Patent Citations (12)
| Title |
|---|
| A. Schiela et al., Mixed-mode integration for Real-time simulation, Oct. 23-24, 2000, Modelica Workshop 2000 Proceedings, Sweden, pp. 69-75.* |
| Aspragathos N.A. and Foussias S., Optimal location of a robot path when considering velocity performance, 2002, Robotica, pp. 139-147.* |
| Blomdell A. et al., Extending an industrial robot controller, Sep. 2005, IEEE robotics and automation magazine, pp. 8594.* |
| Feldmann Klaus et al. , Fast sensor guidance of industrial robots,1999, Robotica, pp. 17-21.* |
| Heim, Alexander et al., Trajectory Optimization of Industrial Robots with Application to Computer-Aided Robotics and Robot Controllers, 2000, Optimization: A Journal of Mathematical Programming and Operations Research, 1029-4945, vol. 47, Issue 3, pp. 407-420 (1-14).* |
| Kawasaki Heavy Industries,Ltda, Kawasaki robot controller,no date, 4 pages.* |
| Kazi, Arif et al., Design Optimization of Industrial Robots using the Modelica Multi-physics Modeling Language, Proceedings of the 33rd ISR (International Symposium on Robotics) Oct. 7-11, 2002, pp. 1-5.* |
| M. Schlemmer et al., Real-Time Collision-Free Trajectory Optimization of Robot Manipulators via Semi-Infinite Parameter Optimization, Sep. 1998, The International Journal of Robotics Research, vol. 17, No. 9, pp. 1013-1021.* |
| Motoman, Robot control system Motoman-NX100, 2004, 4 pages.* |
| Resit Soylu et al., Linearization and Optimization of robot Dynamics via Inertial Parameter Design, Mar. 1996, Journal of Robotic Systems 13(8), pp. 527-538.* |
| Sommer Egon et al. ,SpeedFace-A real time window to robot control, 2003, CAN in automation, pp. 10-14.* |
| Sommer Egon et al. ,SpeedFace—A real time window to robot control, 2003, CAN in automation, pp. 10-14.* |
Cited By (48)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20090099738A1 (en)* | 2001-08-31 | 2009-04-16 | George Danko | Coordinated joint motion control system |
| US9969084B2 (en) | 2001-08-31 | 2018-05-15 | Board Of Regents Of The Nevada System Of Higher Education, On Behalf Of The University Of Nevada, Reno | Coordinated joint motion control system |
| US8145355B2 (en) | 2001-08-31 | 2012-03-27 | Board Of Regents Of The Nevada System Of Higher Education, On Behalf Of The University Of Nevada, Reno | Coordinated joint motion control system |
| US20070168100A1 (en)* | 2006-01-18 | 2007-07-19 | George Danko | Coordinated joint motion control system with position error correction |
| US9304501B2 (en) | 2006-01-18 | 2016-04-05 | Board Of Regents Of The Nevada System Of Higher Education, On Behalf Of The University Of Nevada, Reno | Coordinated joint motion control system with position error correction |
| US8065060B2 (en)* | 2006-01-18 | 2011-11-22 | The Board Of Regents Of The University And Community College System On Behalf Of The University Of Nevada | Coordinated joint motion control system with position error correction |
| US20110046784A1 (en)* | 2009-08-18 | 2011-02-24 | Noel Wayne Anderson | Asymmetric stereo vision system |
| US8396597B2 (en) | 2009-08-18 | 2013-03-12 | Deere & Company | Distributed robotic guidance |
| US20110046780A1 (en)* | 2009-08-18 | 2011-02-24 | Noel Wayne Anderson | Distributed robotic guidance |
| US9921712B2 (en) | 2010-12-29 | 2018-03-20 | Mako Surgical Corp. | System and method for providing substantially stable control of a surgical tool |
| US9616565B2 (en) | 2012-06-26 | 2017-04-11 | Abb Schweiz Ag | Adjusting parameters of a dynamical robot model |
| US10571896B2 (en) | 2012-07-09 | 2020-02-25 | Deep Learning Robotics Ltd. | Natural machine interface system |
| US9753453B2 (en) | 2012-07-09 | 2017-09-05 | Deep Learning Robotics Ltd. | Natural machine interface system |
| US10314661B2 (en) | 2012-08-03 | 2019-06-11 | Stryker Corporation | Surgical robotic system and method for controlling an instrument feed rate |
| US11672620B2 (en) | 2012-08-03 | 2023-06-13 | Stryker Corporation | Robotic system and method for removing a volume of material from a patient |
| US12364561B2 (en) | 2012-08-03 | 2025-07-22 | Stryker Corporation | Hand-held pendant for controlling a surgical robotic manipulator in a semi-autonomous mode |
| US9681920B2 (en) | 2012-08-03 | 2017-06-20 | Stryker Corporation | Robotic system and method for reorienting a surgical instrument moving along a tool path |
| US12070288B2 (en) | 2012-08-03 | 2024-08-27 | Stryker Corporation | Robotic system and method for removing a volume of material from a patient |
| US9566122B2 (en) | 2012-08-03 | 2017-02-14 | Stryker Corporation | Robotic system and method for transitioning between operating modes |
| US9795445B2 (en) | 2012-08-03 | 2017-10-24 | Stryker Corporation | System and method for controlling a manipulator in response to backdrive forces |
| US9820818B2 (en) | 2012-08-03 | 2017-11-21 | Stryker Corporation | System and method for controlling a surgical manipulator based on implant parameters |
| US12004836B2 (en) | 2012-08-03 | 2024-06-11 | Stryker Corporation | Surgical manipulator and method of operating the same using virtual rigid body modeling preliminary |
| US9480534B2 (en) | 2012-08-03 | 2016-11-01 | Stryker Corporation | Navigation system and method for removing a volume of tissue from a patient |
| US9566125B2 (en) | 2012-08-03 | 2017-02-14 | Stryker Corporation | Surgical manipulator having a feed rate calculator |
| US9226796B2 (en) | 2012-08-03 | 2016-01-05 | Stryker Corporation | Method for detecting a disturbance as an energy applicator of a surgical instrument traverses a cutting path |
| US10350017B2 (en) | 2012-08-03 | 2019-07-16 | Stryker Corporation | Manipulator and method for controlling the manipulator based on joint limits |
| US10420619B2 (en) | 2012-08-03 | 2019-09-24 | Stryker Corporation | Surgical manipulator and method for transitioning between operating modes |
| US10426560B2 (en) | 2012-08-03 | 2019-10-01 | Stryker Corporation | Robotic system and method for reorienting a surgical instrument moving along a tool path |
| US10463440B2 (en) | 2012-08-03 | 2019-11-05 | Stryker Corporation | Surgical manipulator and method for resuming semi-autonomous tool path position |
| US9119655B2 (en) | 2012-08-03 | 2015-09-01 | Stryker Corporation | Surgical manipulator capable of controlling a surgical instrument in multiple modes |
| US11639001B2 (en) | 2012-08-03 | 2023-05-02 | Stryker Corporation | Robotic system and method for reorienting a surgical instrument |
| US11045958B2 (en) | 2012-08-03 | 2021-06-29 | Stryker Corporation | Surgical robotic system and method for commanding instrument position based on iterative boundary evaluation |
| US11471232B2 (en) | 2012-08-03 | 2022-10-18 | Stryker Corporation | Surgical system and method utilizing impulse modeling for controlling an instrument |
| US11179210B2 (en) | 2012-08-03 | 2021-11-23 | Stryker Corporation | Surgical manipulator and method for controlling pose of an instrument based on virtual rigid body modelling |
| US10836038B2 (en) | 2014-05-21 | 2020-11-17 | Fanuc America Corporation | Learning path control |
| US12167943B2 (en)* | 2014-10-30 | 2024-12-17 | Intuitive Surgical Operations, Inc. | System and method for an articulated arm based tool guide |
| US20230338111A1 (en)* | 2014-10-30 | 2023-10-26 | Intuitive Surgical Operations, Inc. | System and method for an articulated arm based tool guide |
| US9724826B1 (en) | 2015-05-28 | 2017-08-08 | X Development Llc | Selecting physical arrangements for objects to be acted upon by a robot |
| US9682476B1 (en) | 2015-05-28 | 2017-06-20 | X Development Llc | Selecting robot poses to account for cost |
| CN106371405A (en)* | 2015-07-24 | 2017-02-01 | 西门子公司 | Automatic optimization system for servo driver, servo driver, and automatic optimization debugging method for servo driver |
| US10035266B1 (en) | 2016-01-18 | 2018-07-31 | X Development Llc | Generating robot trajectories using a real time trajectory generator and a path optimizer |
| US11850011B2 (en) | 2016-12-16 | 2023-12-26 | Mako Surgical Corp. | Techniques for modifying tool operation in a surgical robotic system based on comparing actual and commanded states of the tool relative to a surgical site |
| US11202682B2 (en) | 2016-12-16 | 2021-12-21 | Mako Surgical Corp. | Techniques for modifying tool operation in a surgical robotic system based on comparing actual and commanded states of the tool relative to a surgical site |
| US12349994B2 (en) | 2016-12-16 | 2025-07-08 | Mako Surgical Corp. | Techniques for modifying tool operation in a surgical robotic system based on comparing actual and commanded states of the tool relative to a surgical site |
| US20210245364A1 (en)* | 2018-04-25 | 2021-08-12 | Abb Schweiz Ag | Method And Control System For Controlling Movement Trajectories Of A Robot |
| US12434384B2 (en)* | 2018-04-25 | 2025-10-07 | Abb Schweiz Ag | Method and control system for controlling movement trajectories of a robot |
| US11325263B2 (en)* | 2018-06-29 | 2022-05-10 | Teradyne, Inc. | System and method for real-time robotic control |
| US20240240939A1 (en)* | 2020-07-09 | 2024-07-18 | Siemens Aktiengesellschaft | Method and Device for Analyzing the Surface of a Workpiece |
Also Published As
| Publication number | Publication date |
|---|---|
| US20070244599A1 (en) | 2007-10-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7853356B2 (en) | Method for optimizing a robot program and a robot system | |
| JP2006302282A (en) | Method for optimizing robot program and robot control system | |
| US12032366B2 (en) | Method and apparatus for simulating the machining on a machine tool using a self-learning system | |
| Li et al. | A flexible manufacturing assembly system with deep reinforcement learning | |
| EP3002646B1 (en) | Virtual design engineering | |
| US11625011B2 (en) | Control system database systems and methods | |
| JP2017199077A (en) | Cell controller optimizing operation of production system having plurality of industrial machines | |
| EP3671571A1 (en) | A method and system for generating an artificial intelligence model | |
| CN115026835A (en) | Method for optimizing overall performance of robot mechanical arm servo system | |
| Bilgic et al. | Meta-heuristic tuning of the LQR weighting matrices using various objective functions on an experimental flexible arm under the effects of disturbance | |
| EP3037904B1 (en) | Sizing and selection closer to the executing environment | |
| Albo et al. | Modular Virtual Preparation method of production systems using a Digital Twin architecture | |
| Øvern | Industry 4.0-Digital twins and OPC UA | |
| CN118769243B (en) | Three-dimensional parametric design method and system for intelligent building robots | |
| Ye et al. | Multi-level optimization approach for multi-robot manufacturing systems | |
| Mo et al. | Digital twin-based self-learning decision-making framework for industrial robots in manufacturing | |
| Kibira et al. | Data requirements for a digital twin of a robot workcell | |
| Carlier et al. | A digital twin framework for virtual re-commissioning of work-drive systems using cad-based motion co-simulation | |
| Perry et al. | Optimizing a manufacturing pick-and-place operation on a robotic arm using a digital twin | |
| Arnarson | Digital twin simulation with Visual Components | |
| Astudillo et al. | Towards an open toolchain for fast nonlinear MPC for serial robots | |
| Skubic et al. | A telerobotics construction set with integrated performance analysis | |
| CN118990519B (en) | Training method and system for mechanical arm control model | |
| Domingues et al. | Protocol Performance in Robotics: Analyzing ADS vs. UDP Protocols for ROS2 and TwinCAT Integration | |
| Floridan | Absolute Calibration of an Industrial Manipulator through a Compensation Method based on a Neural Network |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| AS | Assignment | Owner name:FANUC ROBOTICS AMERICA, INC., MICHIGAN Free format text:ASSIGNMENT OF ASSIGNORS INTEREST;ASSIGNORS:TSAI, JASON;SUN, YI;CHENG, SAI-KAI;AND OTHERS;REEL/FRAME:017709/0520;SIGNING DATES FROM 20060411 TO 20060412 Owner name:FANUC ROBOTICS AMERICA, INC., MICHIGAN Free format text:ASSIGNMENT OF ASSIGNORS INTEREST;ASSIGNORS:TSAI, JASON;SUN, YI;CHENG, SAI-KAI;AND OTHERS;SIGNING DATES FROM 20060411 TO 20060412;REEL/FRAME:017709/0520 | |
| STCF | Information on status: patent grant | Free format text:PATENTED CASE | |
| FPAY | Fee payment | Year of fee payment:4 | |
| SULP | Surcharge for late payment | ||
| MAFP | Maintenance fee payment | Free format text:PAYMENT OF MAINTENANCE FEE, 8TH YEAR, LARGE ENTITY (ORIGINAL EVENT CODE: M1552) Year of fee payment:8 | |
| MAFP | Maintenance fee payment | Free format text:PAYMENT OF MAINTENANCE FEE, 12TH YEAR, LARGE ENTITY (ORIGINAL EVENT CODE: M1553); ENTITY STATUS OF PATENT OWNER: LARGE ENTITY Year of fee payment:12 |