US20030045888A1 - Articulated apparatus for telemanipulator system - Google Patents
Articulated apparatus for telemanipulator systemDownload PDFInfo
- Publication number
- US20030045888A1 US20030045888A1US10/208,087US20808702AUS2003045888A1US 20030045888 A1US20030045888 A1US 20030045888A1US 20808702 AUS20808702 AUS 20808702AUS 2003045888 A1US2003045888 A1US 2003045888A1
- Authority
- US
- United States
- Prior art keywords
- joint
- cables
- joints
- link members
- movement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Abandoned
Links
- 230000033001locomotionEffects0.000claimsabstractdescription41
- 210000002435tendonAnatomy0.000claimsabstractdescription6
- 230000001276controlling effectEffects0.000claims5
- 210000001503jointAnatomy0.000description21
- 238000001356surgical procedureMethods0.000description10
- 210000002310elbow jointAnatomy0.000description8
- 238000000034methodMethods0.000description8
- 230000003287optical effectEffects0.000description5
- 230000008569processEffects0.000description5
- 239000000835fiberSubstances0.000description4
- 238000013507mappingMethods0.000description4
- 229920001343polytetrafluoroethylenePolymers0.000description4
- 239000004810polytetrafluoroethyleneSubstances0.000description4
- 239000012636effectorSubstances0.000description3
- 230000000694effectsEffects0.000description3
- 210000004247handAnatomy0.000description3
- 125000006850spacer groupChemical group0.000description3
- -1e.g.Substances0.000description2
- 238000011846endoscopic investigationMethods0.000description2
- 238000002674endoscopic surgeryMethods0.000description2
- 210000003811fingerAnatomy0.000description2
- 230000001953sensory effectEffects0.000description2
- 210000000323shoulder jointAnatomy0.000description2
- 239000004705High-molecular-weight polyethyleneSubstances0.000description1
- 229920000508VectranPolymers0.000description1
- 239000004979VectranSubstances0.000description1
- 238000013459approachMethods0.000description1
- 210000001367arteryAnatomy0.000description1
- 239000008280bloodSubstances0.000description1
- 210000004369bloodAnatomy0.000description1
- 230000003247decreasing effectEffects0.000description1
- 238000011161developmentMethods0.000description1
- 210000005224forefingerAnatomy0.000description1
- 238000002955isolationMethods0.000description1
- 239000000463materialSubstances0.000description1
- 230000007246mechanismEffects0.000description1
- 238000012986modificationMethods0.000description1
- 230000004048modificationEffects0.000description1
- 238000012544monitoring processMethods0.000description1
- 229920000642polymerPolymers0.000description1
- 238000011084recoveryMethods0.000description1
- 238000009877renderingMethods0.000description1
- 238000001228spectrumMethods0.000description1
- 210000003813thumbAnatomy0.000description1
- 238000003325tomographyMethods0.000description1
- 230000000472traumatic effectEffects0.000description1
- 210000001835visceraAnatomy0.000description1
- 230000000007visual effectEffects0.000description1
- 238000012800visualizationMethods0.000description1
- 210000000707wristAnatomy0.000description1
Images












Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J3/00—Manipulators of leader-follower type, i.e. both controlling unit and controlled unit perform corresponding spatial movements
- B25J3/04—Manipulators of leader-follower type, i.e. both controlling unit and controlled unit perform corresponding spatial movements involving servo mechanisms
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/35—Surgical robots for telesurgery
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Leader-follower robots
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/77—Manipulators with motion or force scaling
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/104—Programme-controlled manipulators characterised by positioning means for manipulator elements with cables, chains or ribbons
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H20/00—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance
- G16H20/40—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance relating to mechanical, radiation or invasive therapies, e.g. surgery, laser therapy, dialysis or acupuncture
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H40/00—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices
- G16H40/60—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices for the operation of medical equipment or devices
- G16H40/67—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices for the operation of medical equipment or devices for remote operation
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/00234—Surgical instruments, devices or methods for minimally invasive surgery
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/34—Trocars; Puncturing needles
- A61B17/3417—Details of tips or shafts, e.g. grooves, expandable, bendable; Multiple coaxial sliding cannulas, e.g. for dilating
- A61B17/3421—Cannulas
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/34—Trocars; Puncturing needles
- A61B17/3462—Trocars; Puncturing needles with means for changing the diameter or the orientation of the entrance port of the cannula, e.g. for use with different-sized instruments, reduction ports, adapter seals
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2932—Transmission of forces to jaw members
- A61B2017/2939—Details of linkages or pivot points
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
- A61B2034/715—Cable tensioning mechanisms for removing slack
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/361—Image-producing devices, e.g. surgical cameras
Definitions
- the inventiongenerally relates to robotics and particularly relates to telerobotic surgery.
- Telerobotic surgical devicesare well suited for use in performing endoscopic (or minimal access) surgery, as opposed to conventional surgery where the patient's body cavity is open to permit the surgeon's hands access to internal organs.
- Endoscopic techniquesinvolve performing an operation through small (about 5 mm to 10 mm) skin incisions through which instruments are inserted for performing the surgical procedure.
- a video cameramay also be inserted into the patient in the area of the surgical site to view the procedure.
- Endoscopic surgeryis typically less traumatic than conventional surgery, in part, due to the significantly reduced size of the incision. Further, hospitalization periods are shorter and recovery periods may be quicker when surgery is performed endoscopically rather than conventionally.
- the inventionprovides an articulated apparatus that includes a first link member, a second link member, and a third link member.
- the second link memberis coupled to the first link member at a proximal end of the second link member by a first joint having a first axis of rotation.
- the third link memberis coupled to a distal end of the second link member by a second joint.
- the movement of the third link member with respect to the second link memberis governed by at least one tendon that passes through the first axis of rotation of the first joint such that movement of the second member with respect to the first member does not cause movement of the third member with respect to the second member.
- FIG. 1shows an illustrative view of a system incorporating the benefits of the invention
- FIG. 2shows a diagrammatic representation of the relative rotational movements of the joints in the system of FIG. 1;
- FIG. 3shows an illustrative isometric view of the handle portion of the system of FIG. 1;
- FIG. 4shows an illustrative top view of the handle portion shown in FIG. 3 with a portion of the outer housing removed;
- FIG. 5shows an illustrative side view of the handle portion shown in FIG. 3 with a portion of the outer housing removed;
- FIGS. 6 through 11show illustrative sectional views of the handle portion shown in FIG. 5 taken along lines 6 - 6 through 11 - 11 respectively thereof;
- FIGS. 12 and 13show illustrative side and top views respectively of the handle axial rotation portion of the system shown in FIG. 1;
- FIG. 14shows an illustrative and partially exploded isometric view of the rotating bearings of FIGS. 12 and 13;
- FIG. 15shows an illustrative view of the cable collector of FIGS. 12 and 13 with its housing partially removed;
- FIGS. 16 through 18show illustrative sectional views of the cable collector of FIG. 15 taken along lines 16 - 16 through 18 - 18 respectively thereof;
- FIG. 19shows an illustrative side view of the elbow joint portion of the master robot shown in FIG. 1;
- FIGS. 20 and 21show illustrative sectional views of the elbow joint portion shown in FIG. 19 taken along lines 20 - 20 and 21 - 21 thereof;
- FIG. 22shows an illustrative rear view of the elbow joint of FIG. 19 taken along line 22 - 22 thereof;
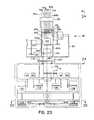
- FIG. 23is an illustrative front view the base and shoulder portions of the master robot of FIG. 1;
- FIG. 24is an illustrative side view of the shoulder portion of the robot of FIG. 1 is taken along line 24 - 24 of FIG. 23;
- FIG. 25is a plan view of a portion of the base portion of FIG. 23 taken along line 25 - 25 thereof;
- FIGS. 26 and 27are illustrative top and side views respectively of the gripper portion of the system of FIG. 1 with the housing partially removed;
- FIGS. 28 - 33are illustrative sectional views of the gripper portion of FIG. 27 taken along lines 28 - 28 through 33 - 33 respectively thereof;
- FIGS. 34 and 35show operational steps of different embodiments of systems incorporating the invention.
- FIGS. 36 and 37show illustrative side views of a portion of another embodiment of the invention involving a four bar linkage in two different positions;
- FIG. 38shows an illustrative isometric view of another embodiment of a gripper mechanism of a system of the invention.
- FIG. 39shows an illustrative side view of a portion of the gripper assembly shown in FIG. 38.
- FIG. 40shows an illustrative top view of the portion of the gripper assembly shown in FIG. 39.
- the inventionprovides a micro-manipulator that is suitable for use in endoscopic surgery.
- the surgeonshould have the familiarity and surety of experiencing his or her hands within the patient at the operative site, while the surgeon's hands are placed within a sensory interface outside of the patient.
- the sensory interface, or master robotprecisely reflects the tactile environment of the robotic hand to the operator's fingers.
- This haptic interfaceelectronically connects the surgeon's hand and wrist position and motion to the micro-manipulator within the patient.
- the digital information communicated between the haptic interface and robotic manipulatoris transmitted through the endoscopic device, whether it be a laparoscope, thoracoscope, arthroscope, laryngoscope or other minimal access surgical device.
- a system 10 including benefits of the inventionincludes a master robot 12 , a central processor 14 , and a slave robot 16 .
- the systemmay be used by positioning the end effector tip 18 of the slave robot 16 through a trocar sleeve 20 into a patient 22 during surgery.
- a surgeonmay manipulate the end effector handle unit 24 of the master robot, to effect the desired positioning and movement of the grippers on the tip unit 18 within the patient 22 .
- the systemmay also include a fiber optic cable with a camera (not shown) at its distal end within the surgical site. The fiber optic cable is connected to a video system (not shown) for viewing the surgical site.
- the cameramay be mounted on the instrument tip unit 18 , or may be positioned away from the site to provide additional perspective on the surgical operation. In certain situations, it may be desirable to provide the camera through an incision other than the one through which the trocar sleeve 20 and instrument have been inserted into the patient.
- the master robot 12includes handles 26 , 27 similar to the scissor handles on a conventional surgical instrument. These handles may be independently rotated about two joints having a common axis generally indicated at 28 . The pair of handles may then be rotated about a joint generally indicated at 30 that has an axis of rotation orthogonally disposed to the axis of rotation of the other two joints at 23 . This structure may then be rotated axially about an axial joint generally located at 32 , which in turn may be rotated about an elbow joint generally located at 34 , a shoulder joint generally located at 36 , and a base rotation joint generally located at 38 . The relative rotational movements of these joints are diagrammatically depicted in FIG. 2.
- the slave robot 16includes a base rotation joint 40 , a shoulder rotation joint 42 , and an elbow rotation joint 44 each similar to the joints 38 , 36 , and 34 of the master robot 12 .
- the slave robot 16also includes two free joints 46 and 48 that provide axial and longitudinal rotation without being connected to any motors. This permits the arm of the slave robot to freely move relative the incision point through the trocar generally indicated at P.
- the slave robot 16also includes an axial rotation joint 50 providing axial rotation of the tip unit 18 , as well as joints 52 and 54 that provide movement of the grippers both independently and together. The relative rotational movements of these joints are also diagrammatically depicted in FIG. 2.
- the motors that control the joints proximate the handle 26 in the master robot 12are located in the base 58
- the motors that control the joints in the slave robot 16 proximate the grippers 56 , 57are located in the base 60 of the slave robot 16 .
- Cablesextend from motors in the base up through each section and joint to control and monitor movement of the non-free joints as will be discussed further below. This permits the robots, and in particular the end effector portion of the slave robot, to be both small and light.
- all of the motorsare located in the base of each respective robot.
- the handles 26 , 27 of the system on FIG. 1are attached to handle pulleys 62 .
- Cables 64 a - 64 dextend from the handle pulleys 62 and pass around additional pulleys within the handle unit 24 .
- the cables 64then extend toward the next proximate section of the robot, and eventually terminate in the base 58 .
- the cables 64extend from the handle pulleys 62 (FIG. 6), then pass around two split level pulleys 66 (FIG. 7), then around another pulley 68 (FIG. 8) to bring the cables near a set of four larger diameter pulleys 70 (FIG. 9), and finally to a set of four alignment pulleys 72 (FIG. 10).
- the cablesmay be formed of any high strength, high molecular weight polyethylene (or other polymeric) fibers such as SPECTRA or VECTRAN polymers.
- the cablesmay be 80/1000 of an inch in diameter, and may be either two single loop cables that are fixed to the handle pulleys 62 , or may comprise four separate cables, each of which is fixed to the handle pulleys 62 .
- the pulleysmay be formed of any suitable material, e.g., polytetrafluoroethylene (PTFE) and the guide pulleys 66 , 68 and 72 may either be independently freely rotating or fixed. The various portions of pulleys 68 and 72 may also rotate independent of one another.
- PTFEpolytetrafluoroethylene
- Pulleys 62includes two pulleys that may rotated independent of one another, and pulleys 70 include four pulleys that may rotated independent of one another. Spacers formed of PTFE tape may also be inserted between adjacent independently rotating pulleys, such as is shown between adjacent pulley wheels 70 in FIG. 9. The spacers 71 permit rotation of the pulleys relative each other with decreased friction, and help maintain placement of the cables on the pulleys.
- the handle unit 24provides three degrees of freedom of movement as follows.
- the pairs of cables 64 a and 64 cwill produce reciprocal movement
- the pair of cables 64 b and 64 dwill produce reciprocal movement as may be discerned from FIG. 3.
- the cables 64 b and 64 dwill move together in a direction opposite the direction of movement of cables 64 a and 64 c. See FIG. 9.
- the cablesmay be run in a variety of ways, for example the placement of cables 64 c and 64 d may be swapped on pulleys 70 , 72 and 74 .
- the axial rotational joint 32 on the master robot 12 of FIG. 1is driven by two cables 74 a and 74 b.
- the cablesextend radially outwardly from one robot arm member 76 , around one set of pulleys each positioned over another arm member 78 fixed to the arm member 76 , and then are attached to an adjoining arm member 80 .
- a safety tie strap 82may be fixed to each of the arms 78 and 80 to prevent rotation beyond a certain range.
- the arm member 80also includes internal rotational bearing 83 through which the cables pass as shown in FIG. 14.
- FIG. 14illustrates the rotational relationship of the cable arms 78 and 80 (shown slightly spaced apart. The positioning of the cables 64 in the center of the sections 80 and 78 permits the section 80 to be rotated with respect to section 78 about joint 32 without significant attendant movement of the cables 64 .
- a cable collector 84is located within the robot section 76 .
- the cable collector 84receives the cables 64 that are positioned within the center of the sections 80 and 78 , and distributes the cables approximately along a plane B that is extends within the section 76 toward the next joint as shown in FIGS. 12, 13 and 19 .
- Cable collectors similar to cable collector 84are used in several other places in the robots 12 and 16 , wherever it is convenient to receive a centrally bundled set of cables at one end and produce a planar distribution of the cables at the other end, or vice versa.
- the cable collector 84may be used to distribute six cables instead of the four shown by feeding the two additional cables through the upper pulleys 86 shown in FIG.
- the cables 74 a and 74 b that control the axial rotation joint 32extend above the cable connector 84 within the section 84 , and approach the plane B, as shown in FIGS. 19 and 20.
- the cables 64 and 74are received between two sets of pulleys 78 and 80 , each set including six mutually independently rotatable pulleys as shown in FIG. 22.
- the pulleys 78 and 80ensure that the cables 64 and 74 remain approximately in the center of the joint 34 as the section 80 is rotated about the section 78 of the robot 12 . This permits the section 76 to be rotated with respect to the section 82 about the joint 34 without significant attendant movement of the cables 64 and 74 .
- the joint 34is actuated by either of cables 84 a and 84 b which extend around pulleys 86 a and 86 b respectively in opposite directions, and terminate at fixed points 88 a and 88 b respectively on opposite sides of section 76 as shown in FIGS. 19 and 22.
- the cables 64 , 74 , and 84extend through the section 82 along a plane generally indicated at C in FIG. 22.
- each set of pulleys 90 and 92also includes six independently rotatable pulleys, and the pulleys 90 and 92 are positioned to permit the cables 64 and 74 to extend through approximately the center to the joint 36 .
- the section 82may therefore be rotated with respect to the base section 94 about joint 36 without significant attendant movement of the cables 64 and 74 .
- the cables 84 a and 84 bextend through the joint 36 around pulleys 96 a and 96 b respectively, and then around pulleys 98 a and 98 b respectively as shown in FIGS. 23 and 24.
- the cable 84 athen wraps around one more pulley 100 a, and then both cables 84 a and 84 b are brought to a hollow termination cylinder 102 .
- the ends of the two cables 84 wrapped around the cylinder 102are attached to each other, forming a single cable 84 .
- the joint 34is actuated in mutually opposing directions.
- the shoulder section 94may be rotated with respect to the base 106 providing a joint 38 that has an axis of rotation that is perpendicular to the axis of rotation of the joint 36 (as shown in FIG. 2).
- the cables 64 and 74extend through a cable collector 104 similar to the cable collector described above with reference to FIGS. 15 - 18 , except that six cables are run through the cable collector 104 .
- the cablesextend from the collector 104 toward the base 106 in three pairs that are positioned such that cables 74 a and 74 b are visible in FIG. 23, and cables 74 b, 64 b, and 64 d are visible in FIG. 24.
- Rotation about joint 34may be effected by controlling the movement of the motor M 1 , which causes cylinders 108 , 110 and 102 to rotate, thereby effecting movement of cables 84 causing rotation of the section 76 with respect to section 82 with respect to the joint 34 .
- Rotationmay be effected about joint 36 by controlling the movement of the motor M 2 , which causes cylinders 112 and 114 to rotate. Cylinder 114 is fixed to the section 82 , so rotation of the cylinder 114 causes rotation of the section 82 with respect to the shoulder section 94 about joint 36 .
- Rotation about joint 38may be achieved by controlling the movement of the motor M 3 , which causes cylinders 116 , 118 , and 120 to rotate, thereby effecting movement of the shoulder section 94 with respect to the base 106 about joint 38 .
- the remaining six jointsare controlled by the remaining six motors in the base. Only two of the remaining motors M 4 and M 5 are shown in FIG. 23, The other four motors are positioned in the base behind the drive system for motors M 4 and M 5 , as indicated in FIG. 25, and operate similar to the systems of motors M 4 and M 5 .
- cable 64 cmay be drawn toward the base by controlling the movement of the motor M 4 , which causes cylinders 122 and 124 to rotate.
- cable 64 dmay be drawn toward the base by controlling the movement of the motor M 5 , which causes cylinders 126 and 128 to rotate.
- the other cables 64 a, 64 b, 74 a and 74 bmay be similarly controlled by four other motors and associated cylinders, including cylinders 130 , 132 , 134 and 136 as shown.
- the gearing ratios of the base rotation joint 38 (associated with M 3 ), the shoulder joint 36 (associated with M 2 ) and the elbow joint 34 (associated with M 1 )should each be about 40 to 1, while the gearing ratios of the remaining joints should be about 8 to 1.
- the slave robot 16is identical to the master robot from the base up to the joint 46 , with the one exception that the gearing ratio for the remaining joints (that was 8 to 1 with the master) is 20 to 1 for the slave robot 16 .
- the joint 40 on the slave robot 16is similar to the joint 38 on the master robot 12
- the joint 42 on the slave robotis similar to the joint 36 on the master robot
- the joint 44 on the slave robotis similar to the joint 34 on the master robot.
- the slave robotalso includes cable tracking through the base 60 and shoulder section and section 140 similar to the cable tracking of the master robot 12 through the base 58 , shoulder section 94 and section 82 .
- the joints 46 and 48are not controlled by any motors.
- the joint 46is similar to the joint 32 described above with reference to FIGS. 12 through 18 except that there are no cables that extend radially outwardly from the section 142 similar to the cables 74 that extend out from the section 76 on the master robot 12 .
- the cablesare collected by a cable collector (as discussed above) prior to the joint 46 where they are redistributed from a planar arrangement to a centrally positioned collection.
- the six cablesthen pass through the joint 46 centrally positioned similar to that shown in FIG. 14. Following the joint 46 , the cables are again redistributed by another cable collector from the central position to a planar distribution.
- the six planar distributed cablesare then fed between two sets of pulleys at the joint 48 as described above with reference to FIGS. 19 - 22 , except that all of the cables pass through the joint. There are no pulleys at joint 48 similar to the pulleys 86 at joint 34 . Joints 46 and 48 are passive joints.
- the six cablesthen continue through the subsequent section 144 .
- the joint 50is identical to (though smaller in scale than) the joint 32 , and is driven by two cables in the same fashion that cables 74 a and 74 b drive joint 32 as discussed above with reference to FIGS. 12 - 18 .
- a cable collectoris also positioned on the proximate side of the joint 50 to redistribute the remaining four cables into the center of the section 146 .
- the section 146(together with the remaining four cables) pass into a patient 22 through the trocar sleeve 20 .
- the gripper portion 18is similar to (though smaller in scale than) the handle portion 24 , except that where the handle portion included a single pulley wheel (pulley 68 in FIGS. 5 and 8), the associated arrangement of the gripper portion includes two pulley wheels (see pulleys 150 of FIGS. 27 and 31).
- cables 156 a - 156 dextend through the gripper portion around pulleys 158 (FIG. 29), around pulleys 160 (FIG. 30), around pulleys 150 (FIG. 31), around pulleys 162 (FIG. 32), and terminate on pulleys 164 (FIG. 33) as shown.
- the cables 156may be formed as discussed above in connection with the handle portions shown in FIGS. 3 - 11 , and the guide pulleys 150 , 158 , and 162 may be independently freely rotating or fixed. Again, PTFE spacers may be placed between adjacent, independently rotating pulleys.
- the gripper unitprovides three degrees of freedom as follows. When one of the cables, 156 a, is moved relative the other of its air, 156 d, the associated gripper 166 will rotate with respect to the central axis of the pulley 164 . Similarly, when one of the cables 156 b is moved relative the other of its pair, 156 c, then the associated gripper 168 will rotate with respect to the central axis of the pulley 164 . When both of cables 156 a and 156 d are pulled with respect to the other cables 156 b and 156 c (and vice versa), then the gripper unit will rotate with respect to the central axis of the pulleys 160 . See FIGS. 27 and 30.
- a system including robotic manipulators of the inventionbegins (step 3400 ) by initializing variables and establishing a home position for the master and robot slaves.
- the system(step 3405 ) then reads the outputs of the optical encoders to identify movement of the joints of the master robot.
- the systemalso reads the outputs of the optical encoders of the slave robot (step 3410 ) for identifying feedback.
- the feedback informationis utilized later in the process loop.
- the systemthen computes the new position of the handle based on the position sensor signals read from the optical encoders of the master robot (step 3415 ).
- a new gripper positionis then computed (step 3420 ) based on the new handle position and a predetermined mapping function that maps handle position to gripper position.
- the desired motor movements of the slave robot(step 3425 ) are then computed based on the new desired position of the gripper using inverse kinematics.
- the desired gripper positionis then compared (step 3430 ) with the actual gripper position as known from monitoring the optical encoder outputs of the slave robot motors.
- the voltages required to move the gripper to the desired positionare then calculated and applied (step 3435 ) proportional to the difference between the desired and actual positions of the gripper.
- a feedback gripper positionis then computed (step 3440 ) based on the outputs of the optical encoders of the slave robot, using forward kinematics.
- the associated handle positionis then computed (step 3445 ) based on the feedback gripper position using the mapping function, and the desired motor movements are calculated for the master robot using inverse kinematics (step 3450 ).
- the feedback voltagesare applied to the required motors of the master robot (step 3455 ) to effect the required feedback from the slave robot.
- the processthen returns to step 3405 and begins again.
- the systemmay cycle very rapidly, providing continuous actuation and feedback responses.
- the forward and inverse kinematical equationsare well known in the art, as is the generation and use of three space mapping functions.
- the process of FIG. 35is similar to the process of FIG. 34 except that the feedback signals are responsive to torque sensors instead of position sensors. Steps 3500 - 3535 are the same as steps 3400 - 3435 of FIG. 34.
- the system of FIG. 35then reads the outputs from torque force sensors on the slave robot (step 3540 ), which outputs are then digitized (step 3545 ).
- a set of feedback gripper forcesare then calculated based on the torque sensor outputs using forward kinematics (step 3550 ).
- Feedback handle forcesare then computed from the feedback gripper forces by using a mapping function (step 3555 ), and the desired motor movements of the master robot may then be calculated by inverse kinematics (step 3560 ).
- the required voltages to be applied to the master robot motorsmay then be calculated (step 3565 ), converted to analog signals (step 3570 ), and then applied to the master robot motors (step 3575 ) to effect the required feedback onto the master robot. The process then returns to step 3505 and begins again.
- a robotmay include a four bar linkage system.
- the link 170is analogous to the link 82 of the system shown in FIG. 1, and the joints 172 and 174 are analogous to the joints 34 and 36 of FIG. 1.
- the cables controlling the link members at the distal end of the robotmay run through the joints 174 and 172 as well as the member 170 similar to the system of FIG. 1.
- the link 176(which is analogous to the link 76 of FIG. 1), extends beyond the joint 172 .
- the extended portion of member 176is connected to another joint 178 , which in turn connects to member 180 .
- Member 180is connected at joint 182 to member 184 which extends to joint 174 .
- Members 176 and 184are always parallel to each another, as are members 170 and 180 always parallel to each other.
- the joint 172is actuated in the present embodiment, by having a cable extend from the base 186 around a pulley at the joint 174 and fasten to member 184 .
- the four bar linkage systemis replaces the elbow joint 34 actuator system of FIG. 1.
- the system of FIGS. 36 and 37permits the elbow joint to be actuated from closer to the base, and may provide for greater strength and rigidity.
- an alternative embodiment of a gripper unit 200 of the inventionincludes link members instead of the cables and pulleys of FIGS. 26 - 33 .
- one half of the gripper unit 200includes links 202 - 220 for controlling gripper 222
- the other half of the gripper unitincludes links 232 - 248 for controlling gripper 252 .
- the gripper unit halvesare shown in somewhat exploded view.
- the grippers 222 and 252should be adjacent one another during operation such that they may each rotate about their respective openings 224 and 226 that are mounted along a common axis 259 that is shown in exploded view in FIG. 38.
- the face of gripper 222 that does not include the links 210 and 220is adjacent the face of gripper 252 that does not include the links 240 and 250 .
- Each of link members 206 , 216 , 236 and 246include openings 228 , 230 , 254 and 256 respectively, that mutually align along an axis generally indicated at 258 .
- the links 206 , 216 , 236 and 246may be stacked in different orders along the axis 258 .
- the linksmay be ordered from top down as 206 , 216 , 236 and 246 , or they may be interleaved as 206 , 236 , 216 and 246 .
- FIG. 39in a side view of one half of the gripper unit 200 of FIG. 38, it can be seen that adjacent links rotate about joint axes that are parallel with the axis 258 .
- the gripper 222rotates about the axis 259 through opening 224 that is orthogonal to the axis 258 .
- the links 206 , 216 , 236 and 246may rotate about the axis 258 , but are otherwise fixed in place.
- the grippers 222 and 252may rotate about the axis 259 , and the secured a fixed distance from the axis 258 , but the pair of grippers 222 and 252 are together rotatable with respect to the axis 258 .
- link 210will rotate (clockwise in FIG. 39) until it contacts a stop 260 on the gripper 222 .
- gripper 222will begin to rotate (clockwise in FIG. 39) about its opening 224 .
- Pulling link 212 away from the axis 258may similarly cause the gripper 222 to rotate (counterclockwise in FIG. 39) about the opening 224 when link 220 contacts stop 262 on the gripper 222 .
- the second portion of the gripper unit including gripper 252may be caused to rotate in a similar fashion by pulling links 232 or 242 away from the axis 258 .
- link members 202 and 212are both pulled away from the axis 258 , then the entire gripper assembly (including grippers 222 and 252 ) will rotate (counterclockwise in FIG. 40) about the axis 258 . Similarly, if links 232 and 242 are both pulled away from the axis 258 , then the entire gripper assembly will rotate (clockwise in FIG. 40) about the axis 258 .
- the gripper assembly 200may provide greater strength, and reduced size. Moreover, the gripper assembly 200 may also provide improved access through extremely small openings. If the links 210 and 220 are rotated about the axis 259 such that the outer ends of the links 210 and 220 are drawn toward the axis 258 and close to one another, and the links 240 and 250 of the gripper 252 are similarly collapsed upon one another, then the gripper assembly 200 may be introduced through an opening that is only the size of the round portion of the grippers 220 and 252 . Once introduced through the small opening, the links 210 , 220 , 240 and 250 may be rotated outward to their respective stops (e.g., 260 on gripper 222 ), whereupon the gripper assembly 200 may be employed within a patient.
- stopse.g., 260 on gripper 222
Landscapes
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Robotics (AREA)
- Biomedical Technology (AREA)
- Public Health (AREA)
- Medical Informatics (AREA)
- General Health & Medical Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Animal Behavior & Ethology (AREA)
- Molecular Biology (AREA)
- Heart & Thoracic Surgery (AREA)
- Veterinary Medicine (AREA)
- Epidemiology (AREA)
- Primary Health Care (AREA)
- Mechanical Engineering (AREA)
- Business, Economics & Management (AREA)
- General Business, Economics & Management (AREA)
- Urology & Nephrology (AREA)
- Manipulator (AREA)
Abstract
Description
- This application is a continuation of U.S. application Ser. No. 09/827,503, filed Apr. 6, 2001, which is a continuation of U.S. application Ser. No. 09/746,853, filed Dec. 21, 2000, which is a divisional of U.S. application Ser. No. 09/375,666, filed Aug. 17, 1999, now U.S. Pat. No. 6,197,017 which issued on Mar. 6, 2001, which is a continuation of U.S. application Ser. No. 09/028,550, filed on Feb. 24, 1998, which is now abandoned. The entire teachings of the above applications are incorporated herein by reference.[0001]
- The invention generally relates to robotics and particularly relates to telerobotic surgery.[0002]
- Telerobotic surgical devices are well suited for use in performing endoscopic (or minimal access) surgery, as opposed to conventional surgery where the patient's body cavity is open to permit the surgeon's hands access to internal organs. Endoscopic techniques involve performing an operation through small (about 5 mm to 10 mm) skin incisions through which instruments are inserted for performing the surgical procedure. A video camera may also be inserted into the patient in the area of the surgical site to view the procedure. Endoscopic surgery is typically less traumatic than conventional surgery, in part, due to the significantly reduced size of the incision. Further, hospitalization periods are shorter and recovery periods may be quicker when surgery is performed endoscopically rather than conventionally.[0003]
- It is, of course, important that the surgeon have some feedback from the surgical site, e.g., visual feedback either through a camera and fiber optic cable, or through real-time computerized tomography scan imagery. Even with good visualization, however, the surgeon's tactile and position senses are physically removed from the operative site rendering the endoscopic procedure slow and clumsy. Current instrumentation, with forceps, scissors, etc., inserted into the body at the end of long slender push rods is not fully satisfactory. The use of such conventional instrumentation may result in longer operative time, and potentially higher risks, for example if a ruptured artery cannot be quickly closed off then significant blood loss may occur. Moreover, there are limitations on the type and complexity of procedures that can be performed endoscopically due, in part, to the limitations on the instruments that may be employed.[0004]
- Limited development work has been undertaken to investigate the use of robots in surgery. The robot at the surgical site, however, must be small and light enough that it may be easily manipulated around and inside of the patient, yet strong enough to perform effective surgery. The controls for the robot must also be precise and not sloppy. Presently existing telerobotic systems, using manipulators both with and without haptic feedback, are generally too bulky and heavy for many endoscopic techniques, or are too weak and imprecise for surgery.[0005]
- There is a need, therefore, for a micro-manipulator that is strong and precise in its movements, yet is small, light and easily manipulated,[0006]
- The invention provides an articulated apparatus that includes a first link member, a second link member, and a third link member. The second link member is coupled to the first link member at a proximal end of the second link member by a first joint having a first axis of rotation. The third link member is coupled to a distal end of the second link member by a second joint. The movement of the third link member with respect to the second link member is governed by at least one tendon that passes through the first axis of rotation of the first joint such that movement of the second member with respect to the first member does not cause movement of the third member with respect to the second member.[0007]
- The following detailed description of the illustrated embodiments may be further understood with reference to the accompanying drawings in which:[0008]
- FIG. 1 shows an illustrative view of a system incorporating the benefits of the invention;[0009]
- FIG. 2 shows a diagrammatic representation of the relative rotational movements of the joints in the system of FIG. 1;[0010]
- FIG. 3 shows an illustrative isometric view of the handle portion of the system of FIG. 1;[0011]
- FIG. 4 shows an illustrative top view of the handle portion shown in FIG. 3 with a portion of the outer housing removed;[0012]
- FIG. 5 shows an illustrative side view of the handle portion shown in FIG. 3 with a portion of the outer housing removed;[0013]
- FIGS. 6 through 11 show illustrative sectional views of the handle portion shown in FIG. 5 taken along lines[0014]6-6 through11-11 respectively thereof;
- FIGS. 12 and 13 show illustrative side and top views respectively of the handle axial rotation portion of the system shown in FIG. 1;[0015]
- FIG. 14 shows an illustrative and partially exploded isometric view of the rotating bearings of FIGS. 12 and 13;[0016]
- FIG. 15 shows an illustrative view of the cable collector of FIGS. 12 and 13 with its housing partially removed;[0017]
- FIGS. 16 through 18 show illustrative sectional views of the cable collector of FIG. 15 taken along lines[0018]16-16 through18-18 respectively thereof;
- FIG. 19 shows an illustrative side view of the elbow joint portion of the master robot shown in FIG. 1;[0019]
- FIGS. 20 and 21 show illustrative sectional views of the elbow joint portion shown in FIG. 19 taken along lines[0020]20-20 and21-21 thereof;
- FIG. 22 shows an illustrative rear view of the elbow joint of FIG. 19 taken along line[0021]22-22 thereof;
- FIG. 23 is an illustrative front view the base and shoulder portions of the master robot of FIG. 1;[0022]
- FIG. 24 is an illustrative side view of the shoulder portion of the robot of FIG. 1 is taken along line[0023]24-24 of FIG. 23;
- FIG. 25 is a plan view of a portion of the base portion of FIG. 23 taken along line[0024]25-25 thereof;
- FIGS. 26 and 27 are illustrative top and side views respectively of the gripper portion of the system of FIG. 1 with the housing partially removed;[0025]
- FIGS.[0026]28-33 are illustrative sectional views of the gripper portion of FIG. 27 taken along lines28-28 through33-33 respectively thereof;
- FIGS. 34 and 35 show operational steps of different embodiments of systems incorporating the invention;[0027]
- FIGS. 36 and 37 show illustrative side views of a portion of another embodiment of the invention involving a four bar linkage in two different positions;[0028]
- FIG. 38 shows an illustrative isometric view of another embodiment of a gripper mechanism of a system of the invention;[0029]
- FIG. 39 shows an illustrative side view of a portion of the gripper assembly shown in FIG. 38; and[0030]
- FIG. 40 shows an illustrative top view of the portion of the gripper assembly shown in FIG. 39.[0031]
- The drawings are not to scale and are intended to be illustrative of the operation of various systems of the invention.[0032]
- The invention provides a micro-manipulator that is suitable for use in endoscopic surgery. During use, the surgeon should have the familiarity and surety of experiencing his or her hands within the patient at the operative site, while the surgeon's hands are placed within a sensory interface outside of the patient. The sensory interface, or master robot, precisely reflects the tactile environment of the robotic hand to the operator's fingers. This haptic interface electronically connects the surgeon's hand and wrist position and motion to the micro-manipulator within the patient. The digital information communicated between the haptic interface and robotic manipulator is transmitted through the endoscopic device, whether it be a laparoscope, thoracoscope, arthroscope, laryngoscope or other minimal access surgical device.[0033]
- Due to the electronic digital interface, it is not required that the haptic interface and micro-manipulator be mechanically connected. This permits civilian, as well as military, physicians to provide care to patients located in remote or potentially hostile environments via telepresence. Telepresence with appropriate sensing instruments could permit one surgeon to conduct operations at different sites (any distance apart) without traveling. Systems incorporating the invention also permit sterile isolation of the slave robot at the operation site from the master robot and surgeon.[0034]
- As shown in FIG. 1, a[0035]
system 10 including benefits of the invention includes amaster robot 12, acentral processor 14, and aslave robot 16. The system may be used by positioning theend effector tip 18 of theslave robot 16 through atrocar sleeve 20 into a patient22 during surgery. During use, a surgeon may manipulate the endeffector handle unit 24 of the master robot, to effect the desired positioning and movement of the grippers on thetip unit 18 within thepatient 22. The system may also include a fiber optic cable with a camera (not shown) at its distal end within the surgical site. The fiber optic cable is connected to a video system (not shown) for viewing the surgical site. The camera may be mounted on theinstrument tip unit 18, or may be positioned away from the site to provide additional perspective on the surgical operation. In certain situations, it may be desirable to provide the camera through an incision other than the one through which thetrocar sleeve 20 and instrument have been inserted into the patient. - The[0036]
master robot 12 includeshandles - The[0037]
slave robot 16 includes a base rotation joint40, a shoulder rotation joint42, and an elbow rotation joint44 each similar to thejoints master robot 12. Theslave robot 16 also includes twofree joints slave robot 16 also includes an axial rotation joint50 providing axial rotation of thetip unit 18, as well asjoints - Significantly, the motors that control the joints proximate the[0038]
handle 26 in themaster robot 12 are located in thebase 58, and the motors that control the joints in theslave robot 16 proximate thegrippers base 60 of theslave robot 16. Cables extend from motors in the base up through each section and joint to control and monitor movement of the non-free joints as will be discussed further below. This permits the robots, and in particular the end effector portion of the slave robot, to be both small and light. In a preferred embodiment, all of the motors are located in the base of each respective robot. - As shown in FIGS. 3 through 5, the[0039]
handles pulleys 62.Cables 64a-64dextend from the handle pulleys62 and pass around additional pulleys within thehandle unit 24. Thecables 64 then extend toward the next proximate section of the robot, and eventually terminate in thebase 58. Specifically, and with reference to the sectional views shown in FIGS. 6 through 11, thecables 64 extend from the handle pulleys62 (FIG. 6), then pass around two split level pulleys66 (FIG. 7), then around another pulley68 (FIG. 8) to bring the cables near a set of four larger diameter pulleys70 (FIG. 9), and finally to a set of four alignment pulleys72 (FIG. 10). - The cables may be formed of any high strength, high molecular weight polyethylene (or other polymeric) fibers such as SPECTRA or VECTRAN polymers. The cables may be 80/1000 of an inch in diameter, and may be either two single loop cables that are fixed to the handle pulleys[0040]62, or may comprise four separate cables, each of which is fixed to the handle pulleys62. The pulleys may be formed of any suitable material, e.g., polytetrafluoroethylene (PTFE) and the guide pulleys66,68 and72 may either be independently freely rotating or fixed. The various portions of
pulleys adjacent pulley wheels 70 in FIG. 9. Thespacers 71 permit rotation of the pulleys relative each other with decreased friction, and help maintain placement of the cables on the pulleys. - The[0041]
handle unit 24 provides three degrees of freedom of movement as follows. When one of thehandles 26 is moved relative the other27, the pairs ofcables cables pulleys 70, thecables cables handles cables pulleys - As shown in FIGS. 12 and 13, the axial rotational joint[0042]32 on the
master robot 12 of FIG. 1, is driven by twocables robot arm member 76, around one set of pulleys each positioned over anotherarm member 78 fixed to thearm member 76, and then are attached to anadjoining arm member 80. By rotating thearm member 80 with respect to thearm member 76, thecables safety tie strap 82 may be fixed to each of thearms cables 64 that extend from thehandle unit 24 run through the center of thearm members arm member 80 also includes internalrotational bearing 83 through which the cables pass as shown in FIG. 14. FIG. 14 illustrates the rotational relationship of thecable arms 78 and80 (shown slightly spaced apart. The positioning of thecables 64 in the center of thesections section 80 to be rotated with respect tosection 78 about joint32 without significant attendant movement of thecables 64. - As shown in phantom in FIG. 12, a[0043]
cable collector 84 is located within therobot section 76. Thecable collector 84 receives thecables 64 that are positioned within the center of thesections section 76 toward the next joint as shown in FIGS. 12, 13 and19. Cable collectors similar tocable collector 84 are used in several other places in therobots cable collector 84 may be used to distribute six cables instead of the four shown by feeding the two additional cables through theupper pulleys 86 shown in FIG. 16 (similar to cable pairs64a,64band64c,64d). The fifth and sixth cables would then pass around theupper pulleys 88 shown in FIG. 17 (similar tocables cables cables 64a-64dto form the planar distribution, in part, because the receiving pulleys at the elbow joint34 urge the cables to form a planar distribution. - The[0044]
cables cable connector 84 within thesection 84, and approach the plane B, as shown in FIGS. 19 and 20. Thecables 64 and74 are received between two sets ofpulleys pulleys cables 64 and74 remain approximately in the center of the joint34 as thesection 80 is rotated about thesection 78 of therobot 12. This permits thesection 76 to be rotated with respect to thesection 82 about the joint34 without significant attendant movement of thecables 64 and74. - The joint[0045]34 is actuated by either of
cables fixed points 88aand88brespectively on opposite sides ofsection 76 as shown in FIGS. 19 and 22. Thecables section 82 along a plane generally indicated at C in FIG. 22. - As shown in FIG. 23, the[0046]
cables 64, and74 are received between another two sets ofpulleys section 82 within joint36. Each set ofpulleys pulleys cables 64 and74 to extend through approximately the center to the joint36. Thesection 82 may therefore be rotated with respect to thebase section 94 about joint36 without significant attendant movement of thecables 64 and74. Thecables cable 84athen wraps around onemore pulley 100a,and then bothcables hollow termination cylinder 102. In a preferred embodiment, the ends of the twocables 84 wrapped around thecylinder 102 are attached to each other, forming asingle cable 84. As thecylinder 102 is rotated between alternate directions, the joint34 is actuated in mutually opposing directions. - The[0047]
shoulder section 94 may be rotated with respect to the base106 providing a joint38 that has an axis of rotation that is perpendicular to the axis of rotation of the joint36 (as shown in FIG. 2). Thecables 64 and74 extend through acable collector 104 similar to the cable collector described above with reference to FIGS.15-18, except that six cables are run through thecable collector 104. The cables extend from thecollector 104 toward the base106 in three pairs that are positioned such thatcables cables - Rotation about joint[0048]34 may be effected by controlling the movement of the motor M1, which causes
cylinders cables 84 causing rotation of thesection 76 with respect tosection 82 with respect to the joint34. - Rotation may be effected about joint[0049]36 by controlling the movement of the motor M2, which causes
cylinders Cylinder 114 is fixed to thesection 82, so rotation of thecylinder 114 causes rotation of thesection 82 with respect to theshoulder section 94 about joint36. - Rotation about joint[0050]38 may be achieved by controlling the movement of the motor M3, which causes
cylinders shoulder section 94 with respect to the base106 about joint38. - The remaining six joints are controlled by the remaining six motors in the base. Only two of the remaining motors M[0051]4 and M5 are shown in FIG. 23, The other four motors are positioned in the base behind the drive system for motors M4 and M5, as indicated in FIG. 25, and operate similar to the systems of motors M4 and M5. In particular,
cable 64cmay be drawn toward the base by controlling the movement of the motor M4, which causescylinders cable 64dmay be drawn toward the base by controlling the movement of the motor M5, which causescylinders other cables cylinders - The gearing ratios of the base rotation joint[0052]38 (associated with M3), the shoulder joint36 (associated with M2) and the elbow joint34 (associated with M1) should each be about 40 to 1, while the gearing ratios of the remaining joints should be about 8 to 1.
- The[0053]
slave robot 16 is identical to the master robot from the base up to the joint46, with the one exception that the gearing ratio for the remaining joints (that was 8 to 1 with the master) is 20 to 1 for theslave robot 16. Specifically, the joint40 on theslave robot 16 is similar to the joint38 on themaster robot 12, and the joint42 on the slave robot is similar to the joint36 on the master robot, and the joint44 on the slave robot is similar to the joint34 on the master robot. The slave robot also includes cable tracking through thebase 60 and shoulder section andsection 140 similar to the cable tracking of themaster robot 12 through thebase 58,shoulder section 94 andsection 82. - In the[0054]
slave robot 16, thejoints section 76 on themaster robot 12. There are six cables that extend through the section142. The cables are collected by a cable collector (as discussed above) prior to the joint46 where they are redistributed from a planar arrangement to a centrally positioned collection. The six cables then pass through the joint46 centrally positioned similar to that shown in FIG. 14. Following the joint46, the cables are again redistributed by another cable collector from the central position to a planar distribution. - The six planar distributed cables are then fed between two sets of pulleys at the joint[0055]48 as described above with reference to FIGS.19-22, except that all of the cables pass through the joint. There are no pulleys at joint48 similar to the
pulleys 86 at joint34.Joints - The six cables then continue through the[0056]
subsequent section 144. The joint50 is identical to (though smaller in scale than) the joint32, and is driven by two cables in the same fashion thatcables section 146. The section146 (together with the remaining four cables) pass into a patient22 through thetrocar sleeve 20. - As shown in FIGS.[0057]26-33, the
gripper portion 18 is similar to (though smaller in scale than) thehandle portion 24, except that where the handle portion included a single pulley wheel (pulley 68 in FIGS. 5 and 8), the associated arrangement of the gripper portion includes two pulley wheels (seepulleys 150 of FIGS. 27 and 31). Generally, cables156a-156dextend through the gripper portion around pulleys158 (FIG. 29), around pulleys160 (FIG. 30), around pulleys150 (FIG. 31), around pulleys162 (FIG. 32), and terminate on pulleys164 (FIG. 33) as shown. - The cables[0058]156 may be formed as discussed above in connection with the handle portions shown in FIGS.3-11, and the guide pulleys150,158, and162 may be independently freely rotating or fixed. Again, PTFE spacers may be placed between adjacent, independently rotating pulleys.
- The gripper unit provides three degrees of freedom as follows. When one of the cables,[0059]156a,is moved relative the other of its air,156d,the associated
gripper 166 will rotate with respect to the central axis of thepulley 164. Similarly, when one of thecables 156bis moved relative the other of its pair,156c,then the associatedgripper 168 will rotate with respect to the central axis of thepulley 164. When both ofcables other cables pulleys 160. See FIGS. 27 and 30. - During operation, and with reference to the flow chart shown in FIG. 34, a system including robotic manipulators of the invention, begins (step[0060]3400) by initializing variables and establishing a home position for the master and robot slaves. The system (step3405) then reads the outputs of the optical encoders to identify movement of the joints of the master robot. The system also reads the outputs of the optical encoders of the slave robot (step3410) for identifying feedback. The feedback information is utilized later in the process loop. The system then computes the new position of the handle based on the position sensor signals read from the optical encoders of the master robot (step3415). A new gripper position is then computed (step3420) based on the new handle position and a predetermined mapping function that maps handle position to gripper position. The desired motor movements of the slave robot (step3425) are then computed based on the new desired position of the gripper using inverse kinematics. The desired gripper position is then compared (step3430) with the actual gripper position as known from monitoring the optical encoder outputs of the slave robot motors. The voltages required to move the gripper to the desired position are then calculated and applied (step3435) proportional to the difference between the desired and actual positions of the gripper.
- A feedback gripper position is then computed (step[0061]3440) based on the outputs of the optical encoders of the slave robot, using forward kinematics. The associated handle position is then computed (step3445) based on the feedback gripper position using the mapping function, and the desired motor movements are calculated for the master robot using inverse kinematics (step3450). The feedback voltages are applied to the required motors of the master robot (step3455) to effect the required feedback from the slave robot. The process then returns to step3405 and begins again. The system may cycle very rapidly, providing continuous actuation and feedback responses. The forward and inverse kinematical equations are well known in the art, as is the generation and use of three space mapping functions.
- The process of FIG. 35 is similar to the process of FIG. 34 except that the feedback signals are responsive to torque sensors instead of position sensors. Steps[0062]3500-3535 are the same as steps3400-3435 of FIG. 34. The system of FIG. 35 then reads the outputs from torque force sensors on the slave robot (step3540), which outputs are then digitized (step3545). A set of feedback gripper forces are then calculated based on the torque sensor outputs using forward kinematics (step3550). Feedback handle forces are then computed from the feedback gripper forces by using a mapping function (step3555), and the desired motor movements of the master robot may then be calculated by inverse kinematics (step3560). The required voltages to be applied to the master robot motors may then be calculated (step3565), converted to analog signals (step3570), and then applied to the master robot motors (step3575) to effect the required feedback onto the master robot. The process then returns to step3505 and begins again.
- As shown in FIGS. 36 and 37, in an alternative embodiment of a system incorporating the benefits of the invention, a robot may include a four bar linkage system. Specifically, the[0063]
link 170 is analogous to thelink 82 of the system shown in FIG. 1, and thejoints joints joints member 170 similar to the system of FIG. 1. - In the system of FIGS. 36 and 37, however, the link[0064]176 (which is analogous to the
link 76 of FIG. 1), extends beyond the joint172. The extended portion ofmember 176 is connected to another joint178, which in turn connects tomember 180.Member 180 is connected at joint182 tomember 184 which extends to joint174.Members members base 186 around a pulley at the joint174 and fasten tomember 184. When this cable is pulled, themember 184 rotates with respect to the joint174, rotating themember 176 with respect to the joint172. The four bar linkage system, therefore, is replaces the elbow joint34 actuator system of FIG. 1. The system of FIGS. 36 and 37 permits the elbow joint to be actuated from closer to the base, and may provide for greater strength and rigidity. - As shown in FIG. 38, an alternative embodiment of a[0065]
gripper unit 200 of the invention includes link members instead of the cables and pulleys of FIGS.26-33. Specifically, one half of thegripper unit 200 includes links202-220 for controllinggripper 222, and the other half of the gripper unit includes links232-248 for controllinggripper 252. The gripper unit halves are shown in somewhat exploded view. Thegrippers respective openings common axis 259 that is shown in exploded view in FIG. 38. The face ofgripper 222 that does not include thelinks gripper 252 that does not include thelinks - Each of[0066]
link members openings links axis 258. For example, the links may be ordered from top down as206,216,236 and246, or they may be interleaved as206,236,216 and246. - As shown in FIG. 39, in a side view of one half of the[0067]
gripper unit 200 of FIG. 38, it can be seen that adjacent links rotate about joint axes that are parallel with theaxis 258. As shown in FIG. 40, thegripper 222 rotates about theaxis 259 throughopening 224 that is orthogonal to theaxis 258. Thelinks axis 258, but are otherwise fixed in place. Thegrippers axis 259, and the secured a fixed distance from theaxis 258, but the pair ofgrippers axis 258. - During use, when link[0068]202 is pulled away from the
axis 258 with-respect to link212, then link210 will rotate (clockwise in FIG. 39) until it contacts astop 260 on thegripper 222. When thestop 260 is contacted and link202 continues to be pulled away from theaxis 258, then gripper222 will begin to rotate (clockwise in FIG. 39) about itsopening 224. Pullinglink 212 away from theaxis 258 may similarly cause thegripper 222 to rotate (counterclockwise in FIG. 39) about theopening 224 when link220 contacts stop262 on thegripper 222. The second portion of the gripperunit including gripper 252 may be caused to rotate in a similar fashion by pullinglinks axis 258. - If[0069]
link members axis 258, then the entire gripper assembly (includinggrippers 222 and252) will rotate (counterclockwise in FIG. 40) about theaxis 258. Similarly, iflinks axis 258, then the entire gripper assembly will rotate (clockwise in FIG. 40) about theaxis 258. - The[0070]
gripper assembly 200 may provide greater strength, and reduced size. Moreover, thegripper assembly 200 may also provide improved access through extremely small openings. If thelinks axis 259 such that the outer ends of thelinks axis 258 and close to one another, and thelinks gripper 252 are similarly collapsed upon one another, then thegripper assembly 200 may be introduced through an opening that is only the size of the round portion of thegrippers links gripper assembly 200 may be employed within a patient. - Any of the various features of the invention disclosed herein may be employed in a wide variety of systems. Those skilled in the art will appreciate that modifications and variations may be made to the above disclosed embodiments without departing from the spirit and scope of the invention.[0071]
Claims (8)
1. An articulated apparatus comprising;
a plurality of link members each in communication with and rotatably movable with respect to at least one other adjacent link member about an associated joint between the adjacent link members;
said plurality of link members including a first link member that extends in a first direction and is associated with a first joint having an axis of rotation in a second direction that is different than the first direction;
and a second link member that extends in a third direction and is associated with a second joint having an axis of rotation in a fourth direction that is substantially coplanar with the third direction.
2. An articulated apparatus as set forth inclaim 1 further comprising a base portion including a drive assembly for controlling the movement of each of the link members with respect to other link members about the joints via tendons that control the rotational movement of the link members about the joints responsive to the drive assembly.
3. An articulated apparatus as set forth inclaim 2 wherein at least some of the tendons extend through at least some of the joints including the first and second joints such that the movement of the link members about the joints through which the tendons extend, does not cause significant attendant movement of the tendons extending through other joints.
4. An articulated apparatus as set forth inclaim 1 comprising a base portion including a drive assembly of a plurality of motors for controlling actions at the joints.
5. An articulated apparatus as set forth inclaim 4 wherein all motors for controlling the link members are disposed remote from the link members.
6. An articulated apparatus as set forth inclaim 5 wherein cables extend from motors in the base up to the joints to control movement of the joints.
7. An articulated apparatus comprising;
a plurality of link members each in communication with and rotatably movable with respect to at least one other adjacent link member about an associated joint between the adjacent link members;
said plurality of link members including a first link member that extends in a first direction and is associated with a first joint having an axis of rotation in a second direction that is different than the first direction;
a second link member that extends in a third direction and is associated with a second joint having an axis of rotation in a fourth direction; and
a base portion including a drive assembly for controlling the movement of each of the link members;
said drive assembly including a plurality of motors for controlling motions of the link members, the majority of said motors being disposed remote from and off of any moving link members.
8. An articulated apparatus as set forth inclaim 7 wherein cables extend from motors in the base up to the joints to control movement of the joints and thereby movement of the link members.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/208,087US20030045888A1 (en) | 1998-02-24 | 2002-07-29 | Articulated apparatus for telemanipulator system |
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US2855098A | 1998-02-24 | 1998-02-24 | |
| US09/375,666US6197017B1 (en) | 1998-02-24 | 1999-08-17 | Articulated apparatus for telemanipulator system |
| US09/746,853US6692485B1 (en) | 1998-02-24 | 2000-12-21 | Articulated apparatus for telemanipulator system |
| US09/827,503US6432112B2 (en) | 1998-02-24 | 2001-04-06 | Articulated apparatus for telemanipulator system |
| US10/208,087US20030045888A1 (en) | 1998-02-24 | 2002-07-29 | Articulated apparatus for telemanipulator system |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US09/827,503ContinuationUS6432112B2 (en) | 1998-02-24 | 2001-04-06 | Articulated apparatus for telemanipulator system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| US20030045888A1true US20030045888A1 (en) | 2003-03-06 |
Family
ID=31190483
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US09/746,853Expired - LifetimeUS6692485B1 (en) | 1998-02-24 | 2000-12-21 | Articulated apparatus for telemanipulator system |
| US09/827,503Expired - LifetimeUS6432112B2 (en) | 1998-02-24 | 2001-04-06 | Articulated apparatus for telemanipulator system |
| US10/208,087AbandonedUS20030045888A1 (en) | 1998-02-24 | 2002-07-29 | Articulated apparatus for telemanipulator system |
Family Applications Before (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US09/746,853Expired - LifetimeUS6692485B1 (en) | 1998-02-24 | 2000-12-21 | Articulated apparatus for telemanipulator system |
| US09/827,503Expired - LifetimeUS6432112B2 (en) | 1998-02-24 | 2001-04-06 | Articulated apparatus for telemanipulator system |
Country Status (1)
| Country | Link |
|---|---|
| US (3) | US6692485B1 (en) |
Cited By (50)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20030216836A1 (en)* | 2002-04-05 | 2003-11-20 | Treat Michael R. | Robotic scrub nurse |
| US20050029978A1 (en)* | 2003-07-08 | 2005-02-10 | Dmitry Oleynikov | Microrobot for surgical applications |
| US20050123263A1 (en)* | 2003-10-14 | 2005-06-09 | Greene, Tweed Of Delaware, Inc. | Fiber optic connector installation tool |
| US20050156877A1 (en)* | 2001-10-29 | 2005-07-21 | Albert Schaeffer | Input device operating on the parallel kinematic principle with haptic feedback |
| US20060007360A1 (en)* | 2004-07-09 | 2006-01-12 | Kim Hee C | Display apparatus and method for reproducing color therewith |
| US20060119304A1 (en)* | 2003-07-08 | 2006-06-08 | Shane Farritor | Robot for surgical applications |
| US20080004634A1 (en)* | 2006-06-22 | 2008-01-03 | Board Of Regents Of The University Of Nebraska | Magnetically coupleable robotic surgical devices and related methods |
| US20080004632A1 (en)* | 2002-08-13 | 2008-01-03 | Sutherland Garnette R | Microsurgical robot system |
| US20080221591A1 (en)* | 2007-02-20 | 2008-09-11 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices for surgical visualization and device manipulation |
| US20080300592A1 (en)* | 2001-02-15 | 2008-12-04 | Hansen Medical, Inc. | Catheter driver system |
| US20090048612A1 (en)* | 2007-08-15 | 2009-02-19 | Board Of Regents Of The University Of Nebraska | Modular and cooperative medical devices and related systems and methods |
| US20090076536A1 (en)* | 2007-08-15 | 2009-03-19 | Board Of Regents Of The University Of Nebraska | Medical inflation, attachment, and delivery devices and related methods |
| US20090105639A1 (en)* | 2001-02-15 | 2009-04-23 | Hansen Medical, Inc. | Catheter driver system |
| US20090171373A1 (en)* | 2007-06-21 | 2009-07-02 | Farritor Shane M | Multifunctional operational component for robotic devices |
| US20090182226A1 (en)* | 2001-02-15 | 2009-07-16 | Barry Weitzner | Catheter tracking system |
| WO2010008663A1 (en) | 2008-07-15 | 2010-01-21 | Immersion Corporation | Modular tool with signal feedback |
| US7960935B2 (en) | 2003-07-08 | 2011-06-14 | The Board Of Regents Of The University Of Nebraska | Robotic devices with agent delivery components and related methods |
| US20110237890A1 (en)* | 2009-12-17 | 2011-09-29 | Board Of Regents Of The University Of Nebraska | Modular and cooperative medical devices and related systems and methods |
| US20120004648A1 (en)* | 2009-03-06 | 2012-01-05 | Seung Wook Choi | Surgical instrument |
| US8343171B2 (en) | 2007-07-12 | 2013-01-01 | Board Of Regents Of The University Of Nebraska | Methods and systems of actuation in robotic devices |
| US20140296637A1 (en)* | 2013-03-27 | 2014-10-02 | Industry-University Cooperation Foundation Hanyang University Erica Campus | Endoscope apparatus |
| US8968267B2 (en) | 2010-08-06 | 2015-03-03 | Board Of Regents Of The University Of Nebraska | Methods and systems for handling or delivering materials for natural orifice surgery |
| US9010214B2 (en) | 2012-06-22 | 2015-04-21 | Board Of Regents Of The University Of Nebraska | Local control robotic surgical devices and related methods |
| US9060781B2 (en) | 2011-06-10 | 2015-06-23 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to surgical end effectors |
| US9089353B2 (en) | 2011-07-11 | 2015-07-28 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems, and related methods |
| US9498292B2 (en) | 2012-05-01 | 2016-11-22 | Board Of Regents Of The University Of Nebraska | Single site robotic device and related systems and methods |
| US9527207B2 (en) | 2011-03-23 | 2016-12-27 | Sri International | Dexterous telemanipulator system |
| US9743987B2 (en) | 2013-03-14 | 2017-08-29 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to robotic surgical devices, end effectors, and controllers |
| US9770305B2 (en) | 2012-08-08 | 2017-09-26 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems, and related methods |
| US9888966B2 (en) | 2013-03-14 | 2018-02-13 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to force control surgical systems |
| US10342561B2 (en) | 2014-09-12 | 2019-07-09 | Board Of Regents Of The University Of Nebraska | Quick-release end effectors and related systems and methods |
| US10376322B2 (en) | 2014-11-11 | 2019-08-13 | Board Of Regents Of The University Of Nebraska | Robotic device with compact joint design and related systems and methods |
| US10582973B2 (en) | 2012-08-08 | 2020-03-10 | Virtual Incision Corporation | Robotic surgical devices, systems, and related methods |
| US10667883B2 (en) | 2013-03-15 | 2020-06-02 | Virtual Incision Corporation | Robotic surgical devices, systems, and related methods |
| US10702347B2 (en) | 2016-08-30 | 2020-07-07 | The Regents Of The University Of California | Robotic device with compact joint design and an additional degree of freedom and related systems and methods |
| US10722319B2 (en) | 2016-12-14 | 2020-07-28 | Virtual Incision Corporation | Releasable attachment device for coupling to medical devices and related systems and methods |
| US10751136B2 (en) | 2016-05-18 | 2020-08-25 | Virtual Incision Corporation | Robotic surgical devices, systems and related methods |
| US10806538B2 (en) | 2015-08-03 | 2020-10-20 | Virtual Incision Corporation | Robotic surgical devices, systems, and related methods |
| US10966700B2 (en) | 2013-07-17 | 2021-04-06 | Virtual Incision Corporation | Robotic surgical devices, systems and related methods |
| US11013564B2 (en) | 2018-01-05 | 2021-05-25 | Board Of Regents Of The University Of Nebraska | Single-arm robotic device with compact joint design and related systems and methods |
| US11051894B2 (en) | 2017-09-27 | 2021-07-06 | Virtual Incision Corporation | Robotic surgical devices with tracking camera technology and related systems and methods |
| US11173617B2 (en) | 2016-08-25 | 2021-11-16 | Board Of Regents Of The University Of Nebraska | Quick-release end effector tool interface |
| US11284958B2 (en) | 2016-11-29 | 2022-03-29 | Virtual Incision Corporation | User controller with user presence detection and related systems and methods |
| US11357595B2 (en) | 2016-11-22 | 2022-06-14 | Board Of Regents Of The University Of Nebraska | Gross positioning device and related systems and methods |
| US11872008B2 (en) | 2017-11-01 | 2024-01-16 | Makoto Jinno | Manipulator and surgery supporting robot system |
| US11883065B2 (en) | 2012-01-10 | 2024-01-30 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices for surgical access and insertion |
| US11903658B2 (en) | 2019-01-07 | 2024-02-20 | Virtual Incision Corporation | Robotically assisted surgical system and related devices and methods |
| US12150722B2 (en) | 2020-07-06 | 2024-11-26 | Virtual Incision Corporation | Surgical robot positioning system and related devices and methods |
| US12156710B2 (en) | 2011-10-03 | 2024-12-03 | Virtual Incision Corporation | Robotic surgical devices, systems and related methods |
| US12295680B2 (en) | 2012-08-08 | 2025-05-13 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems and related methods |
Families Citing this family (276)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7435249B2 (en) | 1997-11-12 | 2008-10-14 | Covidien Ag | Electrosurgical instruments which reduces collateral damage to adjacent tissue |
| US6726686B2 (en) | 1997-11-12 | 2004-04-27 | Sherwood Services Ag | Bipolar electrosurgical instrument for sealing vessels |
| US6228083B1 (en) | 1997-11-14 | 2001-05-08 | Sherwood Services Ag | Laparoscopic bipolar electrosurgical instrument |
| US7713190B2 (en)* | 1998-02-24 | 2010-05-11 | Hansen Medical, Inc. | Flexible instrument |
| US7901399B2 (en)* | 1998-02-24 | 2011-03-08 | Hansen Medical, Inc. | Interchangeable surgical instrument |
| US7789875B2 (en)* | 1998-02-24 | 2010-09-07 | Hansen Medical, Inc. | Surgical instruments |
| US7758569B2 (en) | 1998-02-24 | 2010-07-20 | Hansen Medical, Inc. | Interchangeable surgical instrument |
| US6692485B1 (en)* | 1998-02-24 | 2004-02-17 | Endovia Medical, Inc. | Articulated apparatus for telemanipulator system |
| US8303576B2 (en)* | 1998-02-24 | 2012-11-06 | Hansen Medical, Inc. | Interchangeable surgical instrument |
| US7775972B2 (en)* | 1998-02-24 | 2010-08-17 | Hansen Medical, Inc. | Flexible instrument |
| US6949106B2 (en) | 1998-02-24 | 2005-09-27 | Endovia Medical, Inc. | Surgical instrument |
| US7297142B2 (en)* | 1998-02-24 | 2007-11-20 | Hansen Medical, Inc. | Interchangeable surgical instrument |
| US20020095175A1 (en)* | 1998-02-24 | 2002-07-18 | Brock David L. | Flexible instrument |
| US20080177285A1 (en)* | 1998-02-24 | 2008-07-24 | Hansen Medical, Inc. | Surgical instrument |
| US6860878B2 (en) | 1998-02-24 | 2005-03-01 | Endovia Medical Inc. | Interchangeable instrument |
| US8414598B2 (en) | 1998-02-24 | 2013-04-09 | Hansen Medical, Inc. | Flexible instrument |
| US6233504B1 (en)* | 1998-04-16 | 2001-05-15 | California Institute Of Technology | Tool actuation and force feedback on robot-assisted microsurgery system |
| US7267677B2 (en) | 1998-10-23 | 2007-09-11 | Sherwood Services Ag | Vessel sealing instrument |
| US7118570B2 (en) | 2001-04-06 | 2006-10-10 | Sherwood Services Ag | Vessel sealing forceps with disposable electrodes |
| US7582087B2 (en) | 1998-10-23 | 2009-09-01 | Covidien Ag | Vessel sealing instrument |
| US7364577B2 (en) | 2002-02-11 | 2008-04-29 | Sherwood Services Ag | Vessel sealing system |
| US6594552B1 (en)* | 1999-04-07 | 2003-07-15 | Intuitive Surgical, Inc. | Grip strength with tactile feedback for robotic surgery |
| US10820949B2 (en) | 1999-04-07 | 2020-11-03 | Intuitive Surgical Operations, Inc. | Medical robotic system with dynamically adjustable slave manipulator characteristics |
| EP1224918A3 (en) | 1999-05-10 | 2002-12-18 | endoVia Medical Inc. | Surgical instrument |
| US7637905B2 (en) | 2003-01-15 | 2009-12-29 | Usgi Medical, Inc. | Endoluminal tool deployment system |
| US7744613B2 (en) | 1999-06-25 | 2010-06-29 | Usgi Medical, Inc. | Apparatus and methods for forming and securing gastrointestinal tissue folds |
| US7594912B2 (en) | 2004-09-30 | 2009-09-29 | Intuitive Surgical, Inc. | Offset remote center manipulator for robotic surgery |
| US9517106B2 (en) | 1999-09-17 | 2016-12-13 | Intuitive Surgical Operations, Inc. | Systems and methods for commanded reconfiguration of a surgical manipulator using the null-space |
| US8004229B2 (en) | 2005-05-19 | 2011-08-23 | Intuitive Surgical Operations, Inc. | Software center and highly configurable robotic systems for surgery and other uses |
| US20030109875A1 (en) | 1999-10-22 | 2003-06-12 | Tetzlaff Philip M. | Open vessel sealing forceps with disposable electrodes |
| US6418811B1 (en)* | 2000-05-26 | 2002-07-16 | Ross-Hime Designs, Inc. | Robotic manipulator |
| EP2005914B1 (en)* | 2000-07-20 | 2012-04-04 | CareFusion 2200, Inc. | Hand-actuated articulating surgical tool |
| US7033373B2 (en)* | 2000-11-03 | 2006-04-25 | Satiety, Inc. | Method and device for use in minimally invasive placement of space-occupying intragastric devices |
| US20030135204A1 (en) | 2001-02-15 | 2003-07-17 | Endo Via Medical, Inc. | Robotically controlled medical instrument with a flexible section |
| US7699835B2 (en) | 2001-02-15 | 2010-04-20 | Hansen Medical, Inc. | Robotically controlled surgical instruments |
| ES2262639T3 (en) | 2001-04-06 | 2006-12-01 | Sherwood Services Ag | SHUTTER AND DIVIDER OF GLASSES WITH BUMPER MEMBERS N OCONDUCTIVES. |
| EP1527747B1 (en) | 2001-04-06 | 2015-09-30 | Covidien AG | Electrosurgical instrument which reduces collateral damage to adjacent tissue |
| US7083629B2 (en)* | 2001-05-30 | 2006-08-01 | Satiety, Inc. | Overtube apparatus for insertion into a body |
| US6558400B2 (en) | 2001-05-30 | 2003-05-06 | Satiety, Inc. | Obesity treatment tools and methods |
| US8010180B2 (en) | 2002-03-06 | 2011-08-30 | Mako Surgical Corp. | Haptic guidance system and method |
| US7831292B2 (en)* | 2002-03-06 | 2010-11-09 | Mako Surgical Corp. | Guidance system and method for surgical procedures with improved feedback |
| US8996169B2 (en) | 2011-12-29 | 2015-03-31 | Mako Surgical Corp. | Neural monitor-based dynamic haptics |
| TW200304608A (en)* | 2002-03-06 | 2003-10-01 | Z Kat Inc | System and method for using a haptic device in combination with a computer-assisted surgery system |
| US11202676B2 (en) | 2002-03-06 | 2021-12-21 | Mako Surgical Corp. | Neural monitor-based dynamic haptics |
| US9155544B2 (en)* | 2002-03-20 | 2015-10-13 | P Tech, Llc | Robotic systems and methods |
| ES2203318B1 (en)* | 2002-03-25 | 2005-03-01 | Universidad De Malaga | TELEOPERATION SYSTEM OF ROBOTS FOR LAPAROSCOPIC SURGERY. |
| JP2005524442A (en)* | 2002-05-02 | 2005-08-18 | ジーエムピー サージカル ソリューションズ インコーポレイテッド | Device for positioning medical instruments |
| US6773440B2 (en)* | 2002-07-02 | 2004-08-10 | Satiety, Inc. | Method and device for use in tissue approximation and fixation |
| US6746460B2 (en)* | 2002-08-07 | 2004-06-08 | Satiety, Inc. | Intra-gastric fastening devices |
| US20040176751A1 (en)* | 2002-08-14 | 2004-09-09 | Endovia Medical, Inc. | Robotic medical instrument system |
| US7033384B2 (en) | 2002-08-30 | 2006-04-25 | Satiety, Inc. | Stented anchoring of gastric space-occupying devices |
| US7214233B2 (en)* | 2002-08-30 | 2007-05-08 | Satiety, Inc. | Methods and devices for maintaining a space occupying device in a relatively fixed location within a stomach |
| US7331967B2 (en)* | 2002-09-09 | 2008-02-19 | Hansen Medical, Inc. | Surgical instrument coupling mechanism |
| US7270664B2 (en) | 2002-10-04 | 2007-09-18 | Sherwood Services Ag | Vessel sealing instrument with electrical cutting mechanism |
| US7931649B2 (en) | 2002-10-04 | 2011-04-26 | Tyco Healthcare Group Lp | Vessel sealing instrument with electrical cutting mechanism |
| US7276068B2 (en) | 2002-10-04 | 2007-10-02 | Sherwood Services Ag | Vessel sealing instrument with electrical cutting mechanism |
| US7220237B2 (en) | 2002-10-23 | 2007-05-22 | Satiety, Inc. | Method and device for use in endoscopic organ procedures |
| US7229428B2 (en) | 2002-10-23 | 2007-06-12 | Satiety, Inc. | Method and device for use in endoscopic organ procedures |
| US6656194B1 (en)* | 2002-11-05 | 2003-12-02 | Satiety, Inc. | Magnetic anchoring devices |
| US7799026B2 (en) | 2002-11-14 | 2010-09-21 | Covidien Ag | Compressible jaw configuration with bipolar RF output electrodes for soft tissue fusion |
| US7386365B2 (en) | 2004-05-04 | 2008-06-10 | Intuitive Surgical, Inc. | Tool grip calibration for robotic surgery |
| US20040249367A1 (en)* | 2003-01-15 | 2004-12-09 | Usgi Medical Corp. | Endoluminal tool deployment system |
| EP1601298B1 (en) | 2003-03-13 | 2016-09-07 | Covidien AG | Bipolar concentric electrode assembly for soft tissue fusion |
| US7295893B2 (en)* | 2003-03-31 | 2007-11-13 | Kabushiki Kaisha Toshiba | Manipulator and its control apparatus and method |
| US7175638B2 (en) | 2003-04-16 | 2007-02-13 | Satiety, Inc. | Method and devices for modifying the function of a body organ |
| CA2523675C (en) | 2003-05-01 | 2016-04-26 | Sherwood Services Ag | Electrosurgical instrument which reduces thermal damage to adjacent tissue |
| US7160299B2 (en) | 2003-05-01 | 2007-01-09 | Sherwood Services Ag | Method of fusing biomaterials with radiofrequency energy |
| JP5137230B2 (en) | 2003-05-15 | 2013-02-06 | コヴィディエン・アクチェンゲゼルシャフト | Tissue sealer with non-conductive variable stop member and method for sealing tissue |
| US8007511B2 (en)* | 2003-06-06 | 2011-08-30 | Hansen Medical, Inc. | Surgical instrument design |
| US7156846B2 (en) | 2003-06-13 | 2007-01-02 | Sherwood Services Ag | Vessel sealer and divider for use with small trocars and cannulas |
| US7857812B2 (en) | 2003-06-13 | 2010-12-28 | Covidien Ag | Vessel sealer and divider having elongated knife stroke and safety for cutting mechanism |
| USD956973S1 (en) | 2003-06-13 | 2022-07-05 | Covidien Ag | Movable handle for endoscopic vessel sealer and divider |
| US7150749B2 (en) | 2003-06-13 | 2006-12-19 | Sherwood Services Ag | Vessel sealer and divider having elongated knife stroke and safety cutting mechanism |
| US20080058989A1 (en)* | 2006-04-13 | 2008-03-06 | Board Of Regents Of The University Of Nebraska | Surgical camera robot |
| US7097650B2 (en)* | 2003-10-14 | 2006-08-29 | Satiety, Inc. | System for tissue approximation and fixation |
| US7914543B2 (en)* | 2003-10-14 | 2011-03-29 | Satiety, Inc. | Single fold device for tissue fixation |
| US9848938B2 (en) | 2003-11-13 | 2017-12-26 | Covidien Ag | Compressible jaw configuration with bipolar RF output electrodes for soft tissue fusion |
| US7367976B2 (en) | 2003-11-17 | 2008-05-06 | Sherwood Services Ag | Bipolar forceps having monopolar extension |
| US7811283B2 (en) | 2003-11-19 | 2010-10-12 | Covidien Ag | Open vessel sealing instrument with hourglass cutting mechanism and over-ratchet safety |
| JP4540328B2 (en)* | 2003-11-19 | 2010-09-08 | カール事務器株式会社 | Multi-function drilling device |
| US7500975B2 (en) | 2003-11-19 | 2009-03-10 | Covidien Ag | Spring loaded reciprocating tissue cutting mechanism in a forceps-style electrosurgical instrument |
| US7131970B2 (en) | 2003-11-19 | 2006-11-07 | Sherwood Services Ag | Open vessel sealing instrument with cutting mechanism |
| US7442193B2 (en) | 2003-11-20 | 2008-10-28 | Covidien Ag | Electrically conductive/insulative over-shoe for tissue fusion |
| US20050177176A1 (en)* | 2004-02-05 | 2005-08-11 | Craig Gerbi | Single-fold system for tissue approximation and fixation |
| CA2556228C (en)* | 2004-02-13 | 2014-05-13 | Satiety, Inc. | Methods for reducing hollow organ volume |
| MXPA06009971A (en) | 2004-02-27 | 2007-08-08 | Satiety Inc | Methods and devices for reducing hollow organ volume. |
| US7780662B2 (en) | 2004-03-02 | 2010-08-24 | Covidien Ag | Vessel sealing system using capacitive RF dielectric heating |
| US9028511B2 (en) | 2004-03-09 | 2015-05-12 | Ethicon Endo-Surgery, Inc. | Devices and methods for placement of partitions within a hollow body organ |
| US8628547B2 (en) | 2004-03-09 | 2014-01-14 | Ethicon Endo-Surgery, Inc. | Devices and methods for placement of partitions within a hollow body organ |
| US8449560B2 (en) | 2004-03-09 | 2013-05-28 | Satiety, Inc. | Devices and methods for placement of partitions within a hollow body organ |
| US8252009B2 (en)* | 2004-03-09 | 2012-08-28 | Ethicon Endo-Surgery, Inc. | Devices and methods for placement of partitions within a hollow body organ |
| AU2005231323B2 (en) | 2004-03-26 | 2011-03-31 | Ethicon Endo-Surgery, Inc | Systems and methods for treating obesity |
| US9782130B2 (en)* | 2004-05-28 | 2017-10-10 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic surgical system |
| US10863945B2 (en)* | 2004-05-28 | 2020-12-15 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic surgical system with contact sensing feature |
| US8528565B2 (en)* | 2004-05-28 | 2013-09-10 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic surgical system and method for automated therapy delivery |
| US7974674B2 (en)* | 2004-05-28 | 2011-07-05 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic surgical system and method for surface modeling |
| US8755864B2 (en)* | 2004-05-28 | 2014-06-17 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic surgical system and method for diagnostic data mapping |
| US7632265B2 (en) | 2004-05-28 | 2009-12-15 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Radio frequency ablation servo catheter and method |
| US10258285B2 (en)* | 2004-05-28 | 2019-04-16 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic surgical system and method for automated creation of ablation lesions |
| US7241290B2 (en) | 2004-06-16 | 2007-07-10 | Kinetic Surgical, Llc | Surgical tool kit |
| US8353897B2 (en)* | 2004-06-16 | 2013-01-15 | Carefusion 2200, Inc. | Surgical tool kit |
| EP3123922B1 (en) | 2004-06-25 | 2019-11-27 | Carnegie Mellon University | Steerable, follow the leader device |
| US7195631B2 (en) | 2004-09-09 | 2007-03-27 | Sherwood Services Ag | Forceps with spring loaded end effector assembly |
| US7540872B2 (en) | 2004-09-21 | 2009-06-02 | Covidien Ag | Articulating bipolar electrosurgical instrument |
| US9261172B2 (en)* | 2004-09-30 | 2016-02-16 | Intuitive Surgical Operations, Inc. | Multi-ply strap drive trains for surgical robotic arms |
| US10646292B2 (en) | 2004-09-30 | 2020-05-12 | Intuitive Surgical Operations, Inc. | Electro-mechanical strap stack in robotic arms |
| US7955332B2 (en) | 2004-10-08 | 2011-06-07 | Covidien Ag | Mechanism for dividing tissue in a hemostat-style instrument |
| US20060106288A1 (en)* | 2004-11-17 | 2006-05-18 | Roth Alex T | Remote tissue retraction device |
| GB2420634A (en)* | 2004-11-24 | 2006-05-31 | Perry Slingsby Systems Ltd | Control system for articulated manipulator arm |
| US7264289B2 (en)* | 2004-12-17 | 2007-09-04 | Palo Alto Research Center Incorporated | Articulated robotic serial mechanism and method |
| US7909823B2 (en) | 2005-01-14 | 2011-03-22 | Covidien Ag | Open vessel sealing instrument |
| US7686804B2 (en) | 2005-01-14 | 2010-03-30 | Covidien Ag | Vessel sealer and divider with rotating sealer and cutter |
| US7478576B2 (en)* | 2005-03-22 | 2009-01-20 | Ross-Hime Designs, Inc. | Robotic manipulator |
| US7491202B2 (en) | 2005-03-31 | 2009-02-17 | Covidien Ag | Electrosurgical forceps with slow closure sealing plates and method of sealing tissue |
| US8155910B2 (en)* | 2005-05-27 | 2012-04-10 | St. Jude Medical, Atrial Fibrillation Divison, Inc. | Robotically controlled catheter and method of its calibration |
| CA2520942C (en)* | 2005-09-23 | 2013-03-19 | Queen's University At Kingston | Tactile amplification instrument and method of use |
| ES2381560T3 (en) | 2005-09-30 | 2012-05-29 | Covidien Ag | Insulating sleeve for electrosurgical forceps |
| US7789878B2 (en) | 2005-09-30 | 2010-09-07 | Covidien Ag | In-line vessel sealer and divider |
| US7722607B2 (en) | 2005-09-30 | 2010-05-25 | Covidien Ag | In-line vessel sealer and divider |
| US7879035B2 (en) | 2005-09-30 | 2011-02-01 | Covidien Ag | Insulating boot for electrosurgical forceps |
| CA2561034C (en) | 2005-09-30 | 2014-12-09 | Sherwood Services Ag | Flexible endoscopic catheter with an end effector for coagulating and transfecting tissue |
| US7922953B2 (en) | 2005-09-30 | 2011-04-12 | Covidien Ag | Method for manufacturing an end effector assembly |
| US8734443B2 (en) | 2006-01-24 | 2014-05-27 | Covidien Lp | Vessel sealer and divider for large tissue structures |
| US8298232B2 (en) | 2006-01-24 | 2012-10-30 | Tyco Healthcare Group Lp | Endoscopic vessel sealer and divider for large tissue structures |
| US8882766B2 (en) | 2006-01-24 | 2014-11-11 | Covidien Ag | Method and system for controlling delivery of energy to divide tissue |
| US8241282B2 (en) | 2006-01-24 | 2012-08-14 | Tyco Healthcare Group Lp | Vessel sealing cutting assemblies |
| BRPI0709421A2 (en)* | 2006-03-30 | 2011-07-12 | Activiews Ltd | hand tool position measurement system, method for guiding the distl end of a tool and bandage |
| DE202006007164U1 (en)* | 2006-05-03 | 2007-09-20 | Mann+Hummel Gmbh | Device for receiving and transporting chip-contaminated cooling lubricant |
| WO2007136769A2 (en) | 2006-05-19 | 2007-11-29 | Mako Surgical Corp. | Method and apparatus for controlling a haptic device |
| US8551076B2 (en)* | 2006-06-13 | 2013-10-08 | Intuitive Surgical Operations, Inc. | Retrograde instrument |
| WO2007146984A2 (en) | 2006-06-13 | 2007-12-21 | Intuitive Surgical, Inc. | Control system configured to compensate for non-ideal actuator-to-joint linkage characteristics in a medical robotic system |
| KR101477133B1 (en) | 2006-06-13 | 2014-12-29 | 인튜어티브 서지컬 인코포레이티드 | Minimally invasive surgical system |
| EP2040635A1 (en)* | 2006-06-14 | 2009-04-01 | MacDonald Dettwiler & Associates Inc. | Surgical manipulator with right-angle pulley drive mechanisms |
| US8560047B2 (en) | 2006-06-16 | 2013-10-15 | Board Of Regents Of The University Of Nebraska | Method and apparatus for computer aided surgery |
| US7776037B2 (en) | 2006-07-07 | 2010-08-17 | Covidien Ag | System and method for controlling electrode gap during tissue sealing |
| BRPI0714489B8 (en) | 2006-08-14 | 2021-06-22 | Cardiorobotics Inc | airship multi-articulated device |
| US8597297B2 (en) | 2006-08-29 | 2013-12-03 | Covidien Ag | Vessel sealing instrument with multiple electrode configurations |
| US8070746B2 (en) | 2006-10-03 | 2011-12-06 | Tyco Healthcare Group Lp | Radiofrequency fusion of cardiac tissue |
| JP5225996B2 (en)* | 2006-10-06 | 2013-07-03 | タイコ ヘルスケア グループ リミテッド パートナーシップ | Endoscopic vessel sealer and divider with flexible articulation shaft |
| US8475453B2 (en) | 2006-10-06 | 2013-07-02 | Covidien Lp | Endoscopic vessel sealer and divider having a flexible articulating shaft |
| ES2420962T3 (en)* | 2006-10-24 | 2013-08-28 | Carnegie Mellon University | Adjustable multi-articulated device that has a modular joint assembly |
| US20100241136A1 (en)* | 2006-12-05 | 2010-09-23 | Mark Doyle | Instrument positioning/holding devices |
| USD649249S1 (en) | 2007-02-15 | 2011-11-22 | Tyco Healthcare Group Lp | End effectors of an elongated dissecting and dividing instrument |
| ES2432083T3 (en) | 2007-02-27 | 2013-11-29 | Carnegie Mellon University | A multi-rod device that has a reinforcing member |
| US8267935B2 (en)* | 2007-04-04 | 2012-09-18 | Tyco Healthcare Group Lp | Electrosurgical instrument reducing current densities at an insulator conductor junction |
| US8444631B2 (en)* | 2007-06-14 | 2013-05-21 | Macdonald Dettwiler & Associates Inc | Surgical manipulator |
| US8777945B2 (en)* | 2007-06-29 | 2014-07-15 | Covidien Lp | Method and system for monitoring tissue during an electrosurgical procedure |
| US7877852B2 (en) | 2007-09-20 | 2011-02-01 | Tyco Healthcare Group Lp | Method of manufacturing an end effector assembly for sealing tissue |
| US7877853B2 (en) | 2007-09-20 | 2011-02-01 | Tyco Healthcare Group Lp | Method of manufacturing end effector assembly for sealing tissue |
| AU2008221509B2 (en) | 2007-09-28 | 2013-10-10 | Covidien Lp | Dual durometer insulating boot for electrosurgical forceps |
| US9023043B2 (en) | 2007-09-28 | 2015-05-05 | Covidien Lp | Insulating mechanically-interfaced boot and jaws for electrosurgical forceps |
| US8236025B2 (en) | 2007-09-28 | 2012-08-07 | Tyco Healthcare Group Lp | Silicone insulated electrosurgical forceps |
| US8235993B2 (en) | 2007-09-28 | 2012-08-07 | Tyco Healthcare Group Lp | Insulating boot for electrosurgical forceps with exohinged structure |
| US8221416B2 (en) | 2007-09-28 | 2012-07-17 | Tyco Healthcare Group Lp | Insulating boot for electrosurgical forceps with thermoplastic clevis |
| US8235992B2 (en) | 2007-09-28 | 2012-08-07 | Tyco Healthcare Group Lp | Insulating boot with mechanical reinforcement for electrosurgical forceps |
| US8251996B2 (en) | 2007-09-28 | 2012-08-28 | Tyco Healthcare Group Lp | Insulating sheath for electrosurgical forceps |
| US8267936B2 (en) | 2007-09-28 | 2012-09-18 | Tyco Healthcare Group Lp | Insulating mechanically-interfaced adhesive for electrosurgical forceps |
| JP5024763B2 (en)* | 2007-11-30 | 2012-09-12 | 国立大学法人 東京大学 | Master manipulator used in surgery support system |
| US8764748B2 (en) | 2008-02-06 | 2014-07-01 | Covidien Lp | End effector assembly for electrosurgical device and method for making the same |
| US9486292B2 (en)* | 2008-02-14 | 2016-11-08 | Immersion Corporation | Systems and methods for real-time winding analysis for knot detection |
| US8623276B2 (en) | 2008-02-15 | 2014-01-07 | Covidien Lp | Method and system for sterilizing an electrosurgical instrument |
| US20090209888A1 (en)* | 2008-02-18 | 2009-08-20 | Seyed Hessam Khatami | Spine Wheel |
| US9241768B2 (en)* | 2008-03-27 | 2016-01-26 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Intelligent input device controller for a robotic catheter system |
| US8641663B2 (en)* | 2008-03-27 | 2014-02-04 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter system input device |
| US8317745B2 (en) | 2008-03-27 | 2012-11-27 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter rotatable device cartridge |
| US8641664B2 (en)* | 2008-03-27 | 2014-02-04 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter system with dynamic response |
| US8684962B2 (en) | 2008-03-27 | 2014-04-01 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter device cartridge |
| US8317744B2 (en) | 2008-03-27 | 2012-11-27 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter manipulator assembly |
| US20090248042A1 (en)* | 2008-03-27 | 2009-10-01 | Kirschenman Mark B | Model catheter input device |
| US9161817B2 (en)* | 2008-03-27 | 2015-10-20 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter system |
| US8343096B2 (en) | 2008-03-27 | 2013-01-01 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter system |
| US20090253998A1 (en)* | 2008-04-03 | 2009-10-08 | Convergent Medical Solutions, Inc. | Skin biopsy with suturing prior to resection |
| US9005114B2 (en)* | 2008-04-14 | 2015-04-14 | Carnegie Mellon University | Articulated device with visualization system |
| ES2658968T3 (en)* | 2008-06-05 | 2018-03-13 | Carnegie Mellon University | Extendable articulated probe device |
| RU2011102169A (en)* | 2008-06-27 | 2012-08-10 | Эллидженс Корпарейшен (Us) | FLEXIBLE Wrist ELEMENT, METHODS FOR ITS MANUFACTURE AND USE |
| US8540748B2 (en)* | 2008-07-07 | 2013-09-24 | Intuitive Surgical Operations, Inc. | Surgical instrument wrist |
| US8469956B2 (en) | 2008-07-21 | 2013-06-25 | Covidien Lp | Variable resistor jaw |
| KR100999466B1 (en)* | 2008-08-12 | 2010-12-09 | 정창욱 | Minimally invasive surgical instruments and how to use them |
| DE102008038911A1 (en) | 2008-08-13 | 2010-02-18 | Technische Universität Darmstadt | Manipulation device for a surgical instrument |
| US8257387B2 (en) | 2008-08-15 | 2012-09-04 | Tyco Healthcare Group Lp | Method of transferring pressure in an articulating surgical instrument |
| US8162973B2 (en) | 2008-08-15 | 2012-04-24 | Tyco Healthcare Group Lp | Method of transferring pressure in an articulating surgical instrument |
| US9603652B2 (en) | 2008-08-21 | 2017-03-28 | Covidien Lp | Electrosurgical instrument including a sensor |
| US8317787B2 (en) | 2008-08-28 | 2012-11-27 | Covidien Lp | Tissue fusion jaw angle improvement |
| US8784417B2 (en) | 2008-08-28 | 2014-07-22 | Covidien Lp | Tissue fusion jaw angle improvement |
| US8795274B2 (en) | 2008-08-28 | 2014-08-05 | Covidien Lp | Tissue fusion jaw angle improvement |
| CN104887170B (en) | 2008-09-05 | 2017-06-09 | 卡内基梅隆大学 | More piece endoscopic apparatus with spherical distal ends component |
| US8303582B2 (en) | 2008-09-15 | 2012-11-06 | Tyco Healthcare Group Lp | Electrosurgical instrument having a coated electrode utilizing an atomic layer deposition technique |
| US9375254B2 (en) | 2008-09-25 | 2016-06-28 | Covidien Lp | Seal and separate algorithm |
| US8535312B2 (en) | 2008-09-25 | 2013-09-17 | Covidien Lp | Apparatus, system and method for performing an electrosurgical procedure |
| US8968314B2 (en) | 2008-09-25 | 2015-03-03 | Covidien Lp | Apparatus, system and method for performing an electrosurgical procedure |
| US8142473B2 (en) | 2008-10-03 | 2012-03-27 | Tyco Healthcare Group Lp | Method of transferring rotational motion in an articulating surgical instrument |
| US8469957B2 (en) | 2008-10-07 | 2013-06-25 | Covidien Lp | Apparatus, system, and method for performing an electrosurgical procedure |
| US8016827B2 (en) | 2008-10-09 | 2011-09-13 | Tyco Healthcare Group Lp | Apparatus, system, and method for performing an electrosurgical procedure |
| US8636761B2 (en) | 2008-10-09 | 2014-01-28 | Covidien Lp | Apparatus, system, and method for performing an endoscopic electrosurgical procedure |
| US8486107B2 (en) | 2008-10-20 | 2013-07-16 | Covidien Lp | Method of sealing tissue using radiofrequency energy |
| US8197479B2 (en) | 2008-12-10 | 2012-06-12 | Tyco Healthcare Group Lp | Vessel sealer and divider |
| US20110238010A1 (en)* | 2008-12-31 | 2011-09-29 | Kirschenman Mark B | Robotic catheter system input device |
| US8114122B2 (en) | 2009-01-13 | 2012-02-14 | Tyco Healthcare Group Lp | Apparatus, system, and method for performing an electrosurgical procedure |
| KR101030371B1 (en)* | 2009-04-27 | 2011-04-20 | 국립암센터 | Endoscopic adjustment device for minimally invasive surgery |
| KR101030427B1 (en)* | 2009-04-28 | 2011-04-20 | 국립암센터 | Endoscopic adjustment device for minimally invasive surgery |
| US8187273B2 (en) | 2009-05-07 | 2012-05-29 | Tyco Healthcare Group Lp | Apparatus, system, and method for performing an electrosurgical procedure |
| SG176213A1 (en)* | 2009-05-29 | 2011-12-29 | Univ Nanyang Tech | Robotic system for flexible endoscopy |
| US8246618B2 (en) | 2009-07-08 | 2012-08-21 | Tyco Healthcare Group Lp | Electrosurgical jaws with offset knife |
| US9439736B2 (en) | 2009-07-22 | 2016-09-13 | St. Jude Medical, Atrial Fibrillation Division, Inc. | System and method for controlling a remote medical device guidance system in three-dimensions using gestures |
| US9330497B2 (en) | 2011-08-12 | 2016-05-03 | St. Jude Medical, Atrial Fibrillation Division, Inc. | User interface devices for electrophysiology lab diagnostic and therapeutic equipment |
| US8133254B2 (en) | 2009-09-18 | 2012-03-13 | Tyco Healthcare Group Lp | In vivo attachable and detachable end effector assembly and laparoscopic surgical instrument and methods therefor |
| US8112871B2 (en) | 2009-09-28 | 2012-02-14 | Tyco Healthcare Group Lp | Method for manufacturing electrosurgical seal plates |
| US8662552B2 (en) | 2010-02-23 | 2014-03-04 | Massachusetts Institute Of Technology | Dexterous and compliant robotic finger |
| US9888973B2 (en) | 2010-03-31 | 2018-02-13 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Intuitive user interface control for remote catheter navigation and 3D mapping and visualization systems |
| US9486189B2 (en) | 2010-12-02 | 2016-11-08 | Hitachi Aloka Medical, Ltd. | Assembly for use with surgery system |
| US9119655B2 (en) | 2012-08-03 | 2015-09-01 | Stryker Corporation | Surgical manipulator capable of controlling a surgical instrument in multiple modes |
| US9921712B2 (en) | 2010-12-29 | 2018-03-20 | Mako Surgical Corp. | System and method for providing substantially stable control of a surgical tool |
| US9113940B2 (en) | 2011-01-14 | 2015-08-25 | Covidien Lp | Trigger lockout and kickback mechanism for surgical instruments |
| US11911117B2 (en) | 2011-06-27 | 2024-02-27 | Board Of Regents Of The University Of Nebraska | On-board tool tracking system and methods of computer assisted surgery |
| US9498231B2 (en) | 2011-06-27 | 2016-11-22 | Board Of Regents Of The University Of Nebraska | On-board tool tracking system and methods of computer assisted surgery |
| CN103764061B (en) | 2011-06-27 | 2017-03-08 | 内布拉斯加大学评议会 | On Tool Tracking System and Computer Assisted Surgery Method |
| EP2807989B1 (en) | 2011-11-23 | 2020-09-30 | Livsmed Inc. | Surgical instrument |
| USD680220S1 (en) | 2012-01-12 | 2013-04-16 | Coviden IP | Slider handle for laparoscopic device |
| US9956042B2 (en) | 2012-01-13 | 2018-05-01 | Vanderbilt University | Systems and methods for robot-assisted transurethral exploration and intervention |
| US9265514B2 (en) | 2012-04-17 | 2016-02-23 | Miteas Ltd. | Manipulator for grasping tissue |
| WO2013158983A1 (en) | 2012-04-20 | 2013-10-24 | Vanderbilt University | Robotic device for establishing access channel |
| US9687303B2 (en) | 2012-04-20 | 2017-06-27 | Vanderbilt University | Dexterous wrists for surgical intervention |
| US9539726B2 (en)* | 2012-04-20 | 2017-01-10 | Vanderbilt University | Systems and methods for safe compliant insertion and hybrid force/motion telemanipulation of continuum robots |
| EP2854687B1 (en) | 2012-06-01 | 2022-08-24 | Intuitive Surgical Operations, Inc. | Systems for avoiding collisions between manipulator arms using a null-space |
| CN107595392B (en) | 2012-06-01 | 2020-11-27 | 直观外科手术操作公司 | Avoidance of manipulator arm collisions with patient using null space |
| CN104334109B (en) | 2012-06-01 | 2017-06-23 | 直观外科手术操作公司 | Systems and methods for reconfiguration of commands of a surgical manipulator using null space |
| US9820818B2 (en) | 2012-08-03 | 2017-11-21 | Stryker Corporation | System and method for controlling a surgical manipulator based on implant parameters |
| CN107198567B (en) | 2012-08-03 | 2021-02-09 | 史赛克公司 | Systems and methods for robotic surgery |
| US9226796B2 (en) | 2012-08-03 | 2016-01-05 | Stryker Corporation | Method for detecting a disturbance as an energy applicator of a surgical instrument traverses a cutting path |
| KR102060390B1 (en) | 2013-03-13 | 2019-12-30 | 스트리커 코포레이션 | System for establishing virtual constraint boundaries |
| EP2996615B1 (en) | 2013-03-13 | 2019-01-30 | Stryker Corporation | System for arranging objects in an operating room in preparation for surgical procedures |
| US10105149B2 (en) | 2013-03-15 | 2018-10-23 | Board Of Regents Of The University Of Nebraska | On-board tool tracking system and methods of computer assisted surgery |
| CN105451670B (en) | 2013-08-07 | 2018-09-04 | 柯惠有限合伙公司 | Surgery forceps |
| CN103640014A (en)* | 2013-11-29 | 2014-03-19 | 苏州晓炎自动化设备有限公司 | Multi-shaft mechanical arm |
| KR101510020B1 (en)* | 2013-12-18 | 2015-04-07 | 현대자동차주식회사 | Robot arm |
| DE102014206930B4 (en)* | 2014-04-10 | 2023-01-26 | Richard Wolf Gmbh | Instrument, in particular medical endoscopic instrument |
| KR101584766B1 (en) | 2014-04-24 | 2016-01-12 | 주식회사 리브스메드 | Surgical instrument |
| US10231777B2 (en) | 2014-08-26 | 2019-03-19 | Covidien Lp | Methods of manufacturing jaw members of an end-effector assembly for a surgical instrument |
| US10709467B2 (en) | 2014-10-02 | 2020-07-14 | Livsmed Inc. | Surgical instrument |
| FR3027246B1 (en)* | 2014-10-16 | 2019-04-12 | Centre National De La Recherche Scientifique (Cnrs) | MODULAR ROBOTIC FINGER FOR PREHENDING AND HANDLING DEXTRE |
| US11344381B2 (en) | 2015-02-17 | 2022-05-31 | Livsmed Inc. | Instrument for surgery |
| US11896336B2 (en) | 2015-02-17 | 2024-02-13 | Livsmed Inc. | Instrument for surgery |
| KR102153407B1 (en) | 2015-02-17 | 2020-09-08 | 주식회사 리브스메드 | Surgical instrument |
| US10987159B2 (en) | 2015-08-26 | 2021-04-27 | Covidien Lp | Electrosurgical end effector assemblies and electrosurgical forceps configured to reduce thermal spread |
| NL2015423B1 (en)* | 2015-09-10 | 2017-03-29 | Deam Holding B V | Surgical instrument. |
| US10213250B2 (en) | 2015-11-05 | 2019-02-26 | Covidien Lp | Deployment and safety mechanisms for surgical instruments |
| GB201521812D0 (en)* | 2015-12-10 | 2016-01-27 | Cambridge Medical Robotics Ltd | Driving a surgical instrument articulation |
| CN108472096B (en) | 2015-12-31 | 2021-11-16 | 史赛克公司 | System and method for performing a procedure on a patient at a target site defined by a virtual object |
| US11376087B2 (en) | 2016-01-12 | 2022-07-05 | Intuitive Surgical Operations, Inc. | Uniform scaling of haptic actuators |
| JP7590072B2 (en) | 2016-01-12 | 2024-11-26 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | Gradual force-feedback transitions between control states |
| CN105902315B (en)* | 2016-06-03 | 2018-06-01 | 河南工业大学 | A kind of new minimally-invasive surgery robot system Minimally Invasive Surgery instrument |
| EP3576596A4 (en) | 2016-12-02 | 2021-01-06 | Vanderbilt University | STEERABLE ENDOSCOPE WITH CONTINUOUS MANIPULATOR |
| US11202682B2 (en) | 2016-12-16 | 2021-12-21 | Mako Surgical Corp. | Techniques for modifying tool operation in a surgical robotic system based on comparing actual and commanded states of the tool relative to a surgical site |
| GB2560384B (en)* | 2017-03-10 | 2022-07-20 | Cmr Surgical Ltd | Controlling a surgical instrument |
| US11690645B2 (en) | 2017-05-03 | 2023-07-04 | Medtronic Vascular, Inc. | Tissue-removing catheter |
| EP4018946A1 (en) | 2017-05-03 | 2022-06-29 | Medtronic Vascular, Inc. | Tissue-removing catheter |
| US11166759B2 (en) | 2017-05-16 | 2021-11-09 | Covidien Lp | Surgical forceps |
| US10967504B2 (en) | 2017-09-13 | 2021-04-06 | Vanderbilt University | Continuum robots with multi-scale motion through equilibrium modulation |
| CN111386085B (en)* | 2017-10-02 | 2023-12-26 | 直观外科手术操作公司 | End effector force feedback to master controller |
| US11020852B2 (en) | 2017-10-05 | 2021-06-01 | Brooks Automation, Inc. | Substrate transport apparatus with independent accessory feedthrough |
| KR102191482B1 (en) | 2017-11-14 | 2020-12-15 | 주식회사 리브스메드 | Roll Joint Member for Surgical instrument |
| CA3111088A1 (en)* | 2018-10-30 | 2020-05-07 | Covidien Lp | Binding and non-binding articulation limits for robotic surgical systems |
| US11216071B2 (en) | 2019-01-02 | 2022-01-04 | The Johns Hopkins University | Low-profile tactile output apparatus and method |
| WO2020156414A1 (en)* | 2019-01-31 | 2020-08-06 | The University Of Hong Kong | A compact dental robotic system |
| CN111941403B (en)* | 2019-05-17 | 2023-07-04 | 本田技研工业株式会社 | Chain link mechanism, its control device and control method |
| US11819236B2 (en) | 2019-05-17 | 2023-11-21 | Medtronic Vascular, Inc. | Tissue-removing catheter |
| WO2021003401A1 (en) | 2019-07-03 | 2021-01-07 | Stryker Corporation | Obstacle avoidance techniques for surgical navigation |
| AU2020315615A1 (en) | 2019-07-15 | 2022-02-17 | Stryker Corporation | Robotic hand-held surgical instrument systems and methods |
| US10828470B1 (en) | 2019-08-14 | 2020-11-10 | Vasoinnovations Inc. | Apparatus and method for advancing catheters or other medical devices through a lumen |
| US12048820B2 (en) | 2019-08-14 | 2024-07-30 | Vasoinnovations Inc. | Apparatus and method for advancing catheters or other medical devices through a lumen |
| US10821267B1 (en) | 2019-08-14 | 2020-11-03 | Vasoinnovations Inc. | Apparatus and method for advancing catheters or other medical devices through a lumen |
| US10773059B1 (en) | 2019-08-14 | 2020-09-15 | Vasoinnovations, Inc. | Apparatus and method for advancing catheters or other medical devices through a lumen |
| US10792469B1 (en) | 2019-08-14 | 2020-10-06 | Vasoinnovations Inc. | Devices, systems, and methods for delivering catheters or other medical devices to locations within a patients body |
| CN111202561B (en)* | 2020-03-01 | 2020-11-03 | 首都医科大学宣武医院 | Operation robot operating rod with experience function |
| US11446058B2 (en)* | 2020-03-27 | 2022-09-20 | Covidien Lp | Fixture device for folding a seal member |
| CN113084818B (en)* | 2021-04-19 | 2023-10-31 | 山东建筑大学 | A remote operation control method of space manipulator based on rocker handle |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4068156A (en)* | 1977-03-01 | 1978-01-10 | Martin Marietta Corporation | Rate control system for manipulator arms |
| US5016489A (en)* | 1988-10-24 | 1991-05-21 | Tokyo Sharyo Seizo Kabushiki Kaisha | Multiarticulation robot |
| US5050608A (en)* | 1988-07-12 | 1991-09-24 | Medirand, Inc. | System for indicating a position to be operated in a patient's body |
| US5828813A (en)* | 1995-09-07 | 1998-10-27 | California Institute Of Technology | Six axis force feedback input device |
| US5907664A (en)* | 1992-08-10 | 1999-05-25 | Computer Motion, Inc. | Automated endoscope system for optimal positioning |
| US6197017B1 (en)* | 1998-02-24 | 2001-03-06 | Brock Rogers Surgical, Inc. | Articulated apparatus for telemanipulator system |
| US6432112B2 (en)* | 1998-02-24 | 2002-08-13 | Brock Rogers Surgical, Inc. | Articulated apparatus for telemanipulator system |
Family Cites Families (65)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2819111A (en) | 1954-04-12 | 1958-01-07 | San Angelo Die Casting & Mfg C | Pipe handling tool |
| US2978118A (en) | 1959-11-03 | 1961-04-04 | Raymond C Goertz | Manipulator for slave robot |
| US3587872A (en) | 1969-04-28 | 1971-06-28 | Paul E Pauly | Mechanical arm and control means therefor |
| US3694021A (en) | 1970-07-31 | 1972-09-26 | James F Mullen | Mechanical hand |
| US3631737A (en) | 1970-09-18 | 1972-01-04 | Nasa | Remote control manipulator for zero gravity environment |
| US3866966A (en) | 1973-05-14 | 1975-02-18 | Ii Frank R Skinner | Multiple prehension manipulator |
| US3877780A (en) | 1973-09-24 | 1975-04-15 | Gen Motors Corp | Heated remotely controlled outside rearview mirror |
| US3976206A (en) | 1975-07-16 | 1976-08-24 | Flatau Carl R | Articulated master slave manipulator |
| SE393230B (en) | 1975-08-28 | 1977-05-02 | Asea Ab | CABLE SPEED CONTROL DEVICE |
| FR2398347A1 (en)* | 1977-07-19 | 1979-02-16 | Crouzet Sa | ROBOT DEVELOPMENTS |
| US4287759A (en) | 1979-02-06 | 1981-09-08 | Fruehauf Corporation | Device for sensing the tension in a load carrying line |
| US4233837A (en) | 1979-02-08 | 1980-11-18 | Owens-Corning Fiberglas Corporation | Apparatus for measuring tension in a linear material |
| US4246661A (en) | 1979-03-15 | 1981-01-27 | The Boeing Company | Digitally-controlled artificial hand |
| US4259876A (en)* | 1979-10-02 | 1981-04-07 | Belyanin Petr N | Mechanical arm |
| US4921293A (en) | 1982-04-02 | 1990-05-01 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Multi-fingered robotic hand |
| JPS5953188A (en) | 1982-09-22 | 1984-03-27 | 株式会社日立製作所 | Articulated manipulator |
| US4806066A (en)* | 1982-11-01 | 1989-02-21 | Microbot, Inc. | Robotic arm |
| US4655673A (en) | 1983-05-10 | 1987-04-07 | Graham S. Hawkes | Apparatus providing tactile feedback to operators of remotely controlled manipulators |
| US5078140A (en) | 1986-05-08 | 1992-01-07 | Kwoh Yik S | Imaging device - aided robotic stereotaxis system |
| US4784010A (en) | 1987-04-27 | 1988-11-15 | Graco Robotics Inc. | Electric robotic work unit |
| IT1211195B (en)* | 1987-07-10 | 1989-10-12 | Bruno Bisiach | INDUSTRIAL ROBOT WITH MULTIPLE ARTICULATIONS WITH MULTI-DEGREE FREEDOM OF MOVEMENT |
| US4865376A (en) | 1987-09-25 | 1989-09-12 | Leaver Scott O | Mechanical fingers for dexterity and grasping |
| US5038089A (en)* | 1988-03-23 | 1991-08-06 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Synchronized computational architecture for generalized bilateral control of robot arms |
| US4903536A (en) | 1988-04-21 | 1990-02-27 | Massachusetts Institute Of Technology | Compact cable transmission with cable differential |
| US5207114A (en) | 1988-04-21 | 1993-05-04 | Massachusetts Institute Of Technology | Compact cable transmission with cable differential |
| US5046375A (en) | 1988-04-21 | 1991-09-10 | Massachusetts Institute Of Technology | Compact cable transmission with cable differential |
| US5116180A (en) | 1988-07-18 | 1992-05-26 | Spar Aerospace Limited | Human-in-the-loop machine control loop |
| US4883400A (en) | 1988-08-24 | 1989-11-28 | Martin Marietta Energy Systems, Inc. | Dual arm master controller for a bilateral servo-manipulator |
| CA2000818C (en) | 1988-10-19 | 1994-02-01 | Akira Tsuchihashi | Master slave manipulator system |
| US5114300A (en) | 1989-03-02 | 1992-05-19 | Wovenwire Corporation | Robotic apparatus |
| US4967126A (en)* | 1990-01-30 | 1990-10-30 | Ford Aerospace Corporation | Method of controlling a seven degree of freedom manipulator arm |
| US5086401A (en) | 1990-05-11 | 1992-02-04 | International Business Machines Corporation | Image-directed robotic system for precise robotic surgery including redundant consistency checking |
| US5193963A (en)* | 1990-10-31 | 1993-03-16 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Force reflecting hand controller |
| US5217003A (en) | 1991-03-18 | 1993-06-08 | Wilk Peter J | Automated surgical system and apparatus |
| US5339799A (en) | 1991-04-23 | 1994-08-23 | Olympus Optical Co., Ltd. | Medical system for reproducing a state of contact of the treatment section in the operation unit |
| US5266875A (en) | 1991-05-23 | 1993-11-30 | Massachusetts Institute Of Technology | Telerobotic system |
| US5279309A (en) | 1991-06-13 | 1994-01-18 | International Business Machines Corporation | Signaling device and method for monitoring positions in a surgical operation |
| US5417210A (en) | 1992-05-27 | 1995-05-23 | International Business Machines Corporation | System and method for augmentation of endoscopic surgery |
| US5238005A (en) | 1991-11-18 | 1993-08-24 | Intelliwire, Inc. | Steerable catheter guidewire |
| CA2128606C (en) | 1992-01-21 | 2008-07-22 | Philip S. Green | Teleoperator system and method with telepresence |
| US5350355A (en) | 1992-02-14 | 1994-09-27 | Automated Medical Instruments, Inc. | Automated surgical instrument |
| US5626595A (en) | 1992-02-14 | 1997-05-06 | Automated Medical Instruments, Inc. | Automated surgical instrument |
| US5430643A (en) | 1992-03-11 | 1995-07-04 | The United States Of America As Represented By The Administrator Of The National Aeronautics And Space Administration | Configuration control of seven degree of freedom arms |
| US5327790A (en) | 1992-06-19 | 1994-07-12 | Massachusetts Institute Of Technology | Reaction sensing torque actuator |
| US5657429A (en) | 1992-08-10 | 1997-08-12 | Computer Motion, Inc. | Automated endoscope system optimal positioning |
| US5515478A (en) | 1992-08-10 | 1996-05-07 | Computer Motion, Inc. | Automated endoscope system for optimal positioning |
| US5762458A (en) | 1996-02-20 | 1998-06-09 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| JPH06114000A (en) | 1992-09-30 | 1994-04-26 | Olympus Optical Co Ltd | Medical manipulator |
| US5397323A (en)* | 1992-10-30 | 1995-03-14 | International Business Machines Corporation | Remote center-of-motion robot for surgery |
| US5451924A (en) | 1993-01-14 | 1995-09-19 | Massachusetts Institute Of Technology | Apparatus for providing sensory substitution of force feedback |
| CA2103626A1 (en)* | 1993-08-09 | 1995-02-10 | Septimiu Edmund Salcudean | Motion scaling tele-operating system with force feedback suitable for microsurgery |
| US5625576A (en) | 1993-10-01 | 1997-04-29 | Massachusetts Institute Of Technology | Force reflecting haptic interface |
| US5876325A (en) | 1993-11-02 | 1999-03-02 | Olympus Optical Co., Ltd. | Surgical manipulation system |
| US5454827A (en) | 1994-05-24 | 1995-10-03 | Aust; Gilbert M. | Surgical instrument |
| US6120433A (en) | 1994-09-01 | 2000-09-19 | Olympus Optical Co., Ltd. | Surgical manipulator system |
| US5814038A (en) | 1995-06-07 | 1998-09-29 | Sri International | Surgical manipulator for a telerobotic system |
| US5649956A (en) | 1995-06-07 | 1997-07-22 | Sri International | System and method for releasably holding a surgical instrument |
| US5784542A (en)* | 1995-09-07 | 1998-07-21 | California Institute Of Technology | Decoupled six degree-of-freedom teleoperated robot system |
| US5624398A (en) | 1996-02-08 | 1997-04-29 | Symbiosis Corporation | Endoscopic robotic surgical tools and methods |
| US5855583A (en) | 1996-02-20 | 1999-01-05 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| US6063095A (en) | 1996-02-20 | 2000-05-16 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive surgical procedures |
| US5807377A (en) | 1996-05-20 | 1998-09-15 | Intuitive Surgical, Inc. | Force-reflecting surgical instrument and positioning mechanism for performing minimally invasive surgery with enhanced dexterity and sensitivity |
| US5792135A (en) | 1996-05-20 | 1998-08-11 | Intuitive Surgical, Inc. | Articulated surgical instrument for performing minimally invasive surgery with enhanced dexterity and sensitivity |
| US6132368A (en) | 1996-12-12 | 2000-10-17 | Intuitive Surgical, Inc. | Multi-component telepresence system and method |
| US6424885B1 (en) | 1999-04-07 | 2002-07-23 | Intuitive Surgical, Inc. | Camera referenced control in a minimally invasive surgical apparatus |
- 2000
- 2000-12-21USUS09/746,853patent/US6692485B1/ennot_activeExpired - Lifetime
- 2001
- 2001-04-06USUS09/827,503patent/US6432112B2/ennot_activeExpired - Lifetime
- 2002
- 2002-07-29USUS10/208,087patent/US20030045888A1/ennot_activeAbandoned
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4068156A (en)* | 1977-03-01 | 1978-01-10 | Martin Marietta Corporation | Rate control system for manipulator arms |
| US5050608A (en)* | 1988-07-12 | 1991-09-24 | Medirand, Inc. | System for indicating a position to be operated in a patient's body |
| US5016489A (en)* | 1988-10-24 | 1991-05-21 | Tokyo Sharyo Seizo Kabushiki Kaisha | Multiarticulation robot |
| US5907664A (en)* | 1992-08-10 | 1999-05-25 | Computer Motion, Inc. | Automated endoscope system for optimal positioning |
| US5828813A (en)* | 1995-09-07 | 1998-10-27 | California Institute Of Technology | Six axis force feedback input device |
| US6197017B1 (en)* | 1998-02-24 | 2001-03-06 | Brock Rogers Surgical, Inc. | Articulated apparatus for telemanipulator system |
| US6432112B2 (en)* | 1998-02-24 | 2002-08-13 | Brock Rogers Surgical, Inc. | Articulated apparatus for telemanipulator system |
Cited By (138)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10695536B2 (en) | 2001-02-15 | 2020-06-30 | Auris Health, Inc. | Catheter driver system |
| US8684952B2 (en) | 2001-02-15 | 2014-04-01 | Hansen Medical, Inc. | Catheter driver system |
| US8414505B1 (en) | 2001-02-15 | 2013-04-09 | Hansen Medical, Inc. | Catheter driver system |
| US20080300592A1 (en)* | 2001-02-15 | 2008-12-04 | Hansen Medical, Inc. | Catheter driver system |
| US20090105639A1 (en)* | 2001-02-15 | 2009-04-23 | Hansen Medical, Inc. | Catheter driver system |
| US20090182226A1 (en)* | 2001-02-15 | 2009-07-16 | Barry Weitzner | Catheter tracking system |
| US20050156877A1 (en)* | 2001-10-29 | 2005-07-21 | Albert Schaeffer | Input device operating on the parallel kinematic principle with haptic feedback |
| US7356448B2 (en)* | 2001-10-29 | 2008-04-08 | Albert Schaeffer | Input device operating on the parallel kinematic principle with haptic feedback |
| US7164968B2 (en) | 2002-04-05 | 2007-01-16 | The Trustees Of Columbia University In The City Of New York | Robotic scrub nurse |
| US20030216836A1 (en)* | 2002-04-05 | 2003-11-20 | Treat Michael R. | Robotic scrub nurse |
| US9220567B2 (en) | 2002-08-13 | 2015-12-29 | Neuroarm Surgical Ltd. | Microsurgical robot system |
| US8005571B2 (en) | 2002-08-13 | 2011-08-23 | Neuroarm Surgical Ltd. | Microsurgical robot system |
| US8041459B2 (en) | 2002-08-13 | 2011-10-18 | Neuroarm Surgical Ltd. | Methods relating to microsurgical robot system |
| US8170717B2 (en) | 2002-08-13 | 2012-05-01 | Neuroarm Surgical Ltd. | Microsurgical robot system |
| US8396598B2 (en) | 2002-08-13 | 2013-03-12 | Neuroarm Surgical Ltd. | Microsurgical robot system |
| US20080004632A1 (en)* | 2002-08-13 | 2008-01-03 | Sutherland Garnette R | Microsurgical robot system |
| US20080161677A1 (en)* | 2002-08-13 | 2008-07-03 | Garnette Roy Sutherland | Methods Relating to Microsurgical Robot System |
| US20080161830A1 (en)* | 2002-08-13 | 2008-07-03 | Garnette Roy Sutherland | Microsurgical Robot System |
| US20140066955A1 (en)* | 2003-07-08 | 2014-03-06 | Board Of Regents Of The University Of Nebraska | Robotic Devices with Arms and Related Methods |
| US7126303B2 (en)* | 2003-07-08 | 2006-10-24 | Board Of Regents Of The University Of Nebraska | Robot for surgical applications |
| US7372229B2 (en)* | 2003-07-08 | 2008-05-13 | Board Of Regents For The University Of Nebraska | Robot for surgical applications |
| US7339341B2 (en) | 2003-07-08 | 2008-03-04 | Board Of Regents Of The University Of Nebraska | Surgical camera robot |
| US9403281B2 (en)* | 2003-07-08 | 2016-08-02 | Board Of Regents Of The University Of Nebraska | Robotic devices with arms and related methods |
| US20160331480A1 (en)* | 2003-07-08 | 2016-11-17 | Board of Regents of the University of Nabraska | Robot Devices with Arms and Related Methods |
| US7492116B2 (en) | 2003-07-08 | 2009-02-17 | Board Of Regents Of The University Of Nebraska | Robot for surgical applications |
| US8604742B2 (en) | 2003-07-08 | 2013-12-10 | Board Of Regents Of The University Of Nebraska | Robotic devices with arms and related methods |
| US20090069821A1 (en)* | 2003-07-08 | 2009-03-12 | Board Of Regents Of The University Of Nebraska | Robotic devices with agent delivery components and related methods |
| US20050029978A1 (en)* | 2003-07-08 | 2005-02-10 | Dmitry Oleynikov | Microrobot for surgical applications |
| US20070241714A1 (en)* | 2003-07-08 | 2007-10-18 | Board Or Regents Of The University Of Nebraska | Robot for surgical applications |
| US7042184B2 (en)* | 2003-07-08 | 2006-05-09 | Board Of Regents Of The University Of Nebraska | Microrobot for surgical applications |
| US20070080658A1 (en)* | 2003-07-08 | 2007-04-12 | Shane Farritor | Robot for Surgical Applications |
| US20060119304A1 (en)* | 2003-07-08 | 2006-06-08 | Shane Farritor | Robot for surgical applications |
| US7199545B2 (en) | 2003-07-08 | 2007-04-03 | Board Of Regents Of The University Of Nebraska | Robot for surgical applications |
| US7772796B2 (en) | 2003-07-08 | 2010-08-10 | Board Of Regents Of The University Of Nebraska | Robotic devices with agent delivery components and related methods |
| US7960935B2 (en) | 2003-07-08 | 2011-06-14 | The Board Of Regents Of The University Of Nebraska | Robotic devices with agent delivery components and related methods |
| US7003209B2 (en)* | 2003-10-14 | 2006-02-21 | Greene, Tweed Of Delaware, Inc. | Fiber optic connector installation tool |
| WO2005038494A3 (en)* | 2003-10-14 | 2006-02-09 | Greene Tweed Inc | Fiber optic connector installation tool |
| US20050123263A1 (en)* | 2003-10-14 | 2005-06-09 | Greene, Tweed Of Delaware, Inc. | Fiber optic connector installation tool |
| US20060007360A1 (en)* | 2004-07-09 | 2006-01-12 | Kim Hee C | Display apparatus and method for reproducing color therewith |
| US10959790B2 (en) | 2006-06-22 | 2021-03-30 | Board Of Regents Of The University Of Nebraska | Multifunctional operational component for robotic devices |
| US8968332B2 (en) | 2006-06-22 | 2015-03-03 | Board Of Regents Of The University Of Nebraska | Magnetically coupleable robotic surgical devices and related methods |
| US10376323B2 (en) | 2006-06-22 | 2019-08-13 | Board Of Regents Of The University Of Nebraska | Multifunctional operational component for robotic devices |
| US20080004634A1 (en)* | 2006-06-22 | 2008-01-03 | Board Of Regents Of The University Of Nebraska | Magnetically coupleable robotic surgical devices and related methods |
| US10307199B2 (en) | 2006-06-22 | 2019-06-04 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices and related methods |
| US20080058835A1 (en)* | 2006-06-22 | 2008-03-06 | Board Of Regents Of The University Of Nebraska | Magnetically coupleable robotic surgical devices and related methods |
| US8834488B2 (en) | 2006-06-22 | 2014-09-16 | Board Of Regents Of The University Of Nebraska | Magnetically coupleable robotic surgical devices and related methods |
| US20080221591A1 (en)* | 2007-02-20 | 2008-09-11 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices for surgical visualization and device manipulation |
| US9579088B2 (en) | 2007-02-20 | 2017-02-28 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices for surgical visualization and device manipulation |
| US8679096B2 (en) | 2007-06-21 | 2014-03-25 | Board Of Regents Of The University Of Nebraska | Multifunctional operational component for robotic devices |
| US20090171373A1 (en)* | 2007-06-21 | 2009-07-02 | Farritor Shane M | Multifunctional operational component for robotic devices |
| US9179981B2 (en) | 2007-06-21 | 2015-11-10 | Board Of Regents Of The University Of Nebraska | Multifunctional operational component for robotic devices |
| US8828024B2 (en) | 2007-07-12 | 2014-09-09 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices for surgical access and procedures |
| US10695137B2 (en) | 2007-07-12 | 2020-06-30 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices for surgical access and procedures |
| US8343171B2 (en) | 2007-07-12 | 2013-01-01 | Board Of Regents Of The University Of Nebraska | Methods and systems of actuation in robotic devices |
| US9956043B2 (en) | 2007-07-12 | 2018-05-01 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices for surgical access and procedures |
| US8974440B2 (en) | 2007-08-15 | 2015-03-10 | Board Of Regents Of The University Of Nebraska | Modular and cooperative medical devices and related systems and methods |
| US20090048612A1 (en)* | 2007-08-15 | 2009-02-19 | Board Of Regents Of The University Of Nebraska | Modular and cooperative medical devices and related systems and methods |
| US20090076536A1 (en)* | 2007-08-15 | 2009-03-19 | Board Of Regents Of The University Of Nebraska | Medical inflation, attachment, and delivery devices and related methods |
| US10335024B2 (en) | 2007-08-15 | 2019-07-02 | Board Of Regents Of The University Of Nebraska | Medical inflation, attachment and delivery devices and related methods |
| WO2010008663A1 (en) | 2008-07-15 | 2010-01-21 | Immersion Corporation | Modular tool with signal feedback |
| US20100016855A1 (en)* | 2008-07-15 | 2010-01-21 | Immersion Corporation | Modular Tool With Signal Feedback |
| US8834465B2 (en) | 2008-07-15 | 2014-09-16 | Immersion Corporation | Modular tool with signal feedback |
| US20120004648A1 (en)* | 2009-03-06 | 2012-01-05 | Seung Wook Choi | Surgical instrument |
| US8894633B2 (en) | 2009-12-17 | 2014-11-25 | Board Of Regents Of The University Of Nebraska | Modular and cooperative medical devices and related systems and methods |
| US20110237890A1 (en)* | 2009-12-17 | 2011-09-29 | Board Of Regents Of The University Of Nebraska | Modular and cooperative medical devices and related systems and methods |
| US8968267B2 (en) | 2010-08-06 | 2015-03-03 | Board Of Regents Of The University Of Nebraska | Methods and systems for handling or delivering materials for natural orifice surgery |
| US9527207B2 (en) | 2011-03-23 | 2016-12-27 | Sri International | Dexterous telemanipulator system |
| US9060781B2 (en) | 2011-06-10 | 2015-06-23 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to surgical end effectors |
| US11065050B2 (en) | 2011-06-10 | 2021-07-20 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to surgical end effectors |
| US11832871B2 (en) | 2011-06-10 | 2023-12-05 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to surgical end effectors |
| US10350000B2 (en) | 2011-06-10 | 2019-07-16 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to surgical end effectors |
| US9757187B2 (en) | 2011-06-10 | 2017-09-12 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to surgical end effectors |
| US10111711B2 (en) | 2011-07-11 | 2018-10-30 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems, and related methods |
| US11909576B2 (en) | 2011-07-11 | 2024-02-20 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems, and related methods |
| US11595242B2 (en) | 2011-07-11 | 2023-02-28 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems and related methods |
| US11032125B2 (en) | 2011-07-11 | 2021-06-08 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems and related methods |
| US12323289B2 (en) | 2011-07-11 | 2025-06-03 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems, and related methods |
| US9089353B2 (en) | 2011-07-11 | 2015-07-28 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems, and related methods |
| US12156710B2 (en) | 2011-10-03 | 2024-12-03 | Virtual Incision Corporation | Robotic surgical devices, systems and related methods |
| US11883065B2 (en) | 2012-01-10 | 2024-01-30 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices for surgical access and insertion |
| US10219870B2 (en) | 2012-05-01 | 2019-03-05 | Board Of Regents Of The University Of Nebraska | Single site robotic device and related systems and methods |
| US11819299B2 (en) | 2012-05-01 | 2023-11-21 | Board Of Regents Of The University Of Nebraska | Single site robotic device and related systems and methods |
| US11529201B2 (en) | 2012-05-01 | 2022-12-20 | Board Of Regents Of The University Of Nebraska | Single site robotic device and related systems and methods |
| US12171512B2 (en) | 2012-05-01 | 2024-12-24 | Board Of Regents Of The University Of Nebraska | Single site robotic device and related systems and methods |
| US9498292B2 (en) | 2012-05-01 | 2016-11-22 | Board Of Regents Of The University Of Nebraska | Single site robotic device and related systems and methods |
| US11484374B2 (en) | 2012-06-22 | 2022-11-01 | Board Of Regents Of The University Of Nebraska | Local control robotic surgical devices and related methods |
| US10470828B2 (en) | 2012-06-22 | 2019-11-12 | Board Of Regents Of The University Of Nebraska | Local control robotic surgical devices and related methods |
| US9010214B2 (en) | 2012-06-22 | 2015-04-21 | Board Of Regents Of The University Of Nebraska | Local control robotic surgical devices and related methods |
| US9770305B2 (en) | 2012-08-08 | 2017-09-26 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems, and related methods |
| US11051895B2 (en) | 2012-08-08 | 2021-07-06 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems, and related methods |
| US11617626B2 (en) | 2012-08-08 | 2023-04-04 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems and related methods |
| US10624704B2 (en) | 2012-08-08 | 2020-04-21 | Board Of Regents Of The University Of Nebraska | Robotic devices with on board control and related systems and devices |
| US11832902B2 (en) | 2012-08-08 | 2023-12-05 | Virtual Incision Corporation | Robotic surgical devices, systems, and related methods |
| US10582973B2 (en) | 2012-08-08 | 2020-03-10 | Virtual Incision Corporation | Robotic surgical devices, systems, and related methods |
| US12295680B2 (en) | 2012-08-08 | 2025-05-13 | Board Of Regents Of The University Of Nebraska | Robotic surgical devices, systems and related methods |
| US12070282B2 (en) | 2013-03-14 | 2024-08-27 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to force control surgical systems |
| US10743949B2 (en) | 2013-03-14 | 2020-08-18 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to force control surgical systems |
| US11806097B2 (en) | 2013-03-14 | 2023-11-07 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to robotic surgical devices, end effectors, and controllers |
| US9743987B2 (en) | 2013-03-14 | 2017-08-29 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to robotic surgical devices, end effectors, and controllers |
| US12336777B2 (en) | 2013-03-14 | 2025-06-24 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to robotic surgical devices, end effectors, and controllers |
| US9888966B2 (en) | 2013-03-14 | 2018-02-13 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to force control surgical systems |
| US10603121B2 (en) | 2013-03-14 | 2020-03-31 | Board Of Regents Of The University Of Nebraska | Methods, systems, and devices relating to robotic surgical devices, end effectors, and controllers |
| US10667883B2 (en) | 2013-03-15 | 2020-06-02 | Virtual Incision Corporation | Robotic surgical devices, systems, and related methods |
| US11633253B2 (en) | 2013-03-15 | 2023-04-25 | Virtual Incision Corporation | Robotic surgical devices, systems, and related methods |
| US20140296637A1 (en)* | 2013-03-27 | 2014-10-02 | Industry-University Cooperation Foundation Hanyang University Erica Campus | Endoscope apparatus |
| US9565990B2 (en)* | 2013-03-27 | 2017-02-14 | Samsung Electronics Co., Ltd | Endoscope apparatus with slave device and master device |
| US10966700B2 (en) | 2013-07-17 | 2021-04-06 | Virtual Incision Corporation | Robotic surgical devices, systems and related methods |
| US11826032B2 (en) | 2013-07-17 | 2023-11-28 | Virtual Incision Corporation | Robotic surgical devices, systems and related methods |
| US11576695B2 (en) | 2014-09-12 | 2023-02-14 | Virtual Incision Corporation | Quick-release end effectors and related systems and methods |
| US10342561B2 (en) | 2014-09-12 | 2019-07-09 | Board Of Regents Of The University Of Nebraska | Quick-release end effectors and related systems and methods |
| US12390240B2 (en) | 2014-09-12 | 2025-08-19 | Virtual Incision Corporation | Quick-release end effectors and related systems and methods |
| US12096999B2 (en) | 2014-11-11 | 2024-09-24 | Board Of Regents Of The University Of Nebraska | Robotic device with compact joint design and related systems and methods |
| US10376322B2 (en) | 2014-11-11 | 2019-08-13 | Board Of Regents Of The University Of Nebraska | Robotic device with compact joint design and related systems and methods |
| US11406458B2 (en) | 2014-11-11 | 2022-08-09 | Board Of Regents Of The University Of Nebraska | Robotic device with compact joint design and related systems and methods |
| US10806538B2 (en) | 2015-08-03 | 2020-10-20 | Virtual Incision Corporation | Robotic surgical devices, systems, and related methods |
| US11872090B2 (en) | 2015-08-03 | 2024-01-16 | Virtual Incision Corporation | Robotic surgical devices, systems, and related methods |
| US10751136B2 (en) | 2016-05-18 | 2020-08-25 | Virtual Incision Corporation | Robotic surgical devices, systems and related methods |
| US11826014B2 (en) | 2016-05-18 | 2023-11-28 | Virtual Incision Corporation | Robotic surgical devices, systems and related methods |
| US12383355B2 (en) | 2016-05-18 | 2025-08-12 | Virtual Incision Corporation | Robotic surgical devices, systems and related methods |
| US11173617B2 (en) | 2016-08-25 | 2021-11-16 | Board Of Regents Of The University Of Nebraska | Quick-release end effector tool interface |
| US12274517B2 (en) | 2016-08-30 | 2025-04-15 | Board Of Regents Of The University Of Nebraska | Robotic device with compact joint design and an additional degree of freedom and related systems and methods |
| US10702347B2 (en) | 2016-08-30 | 2020-07-07 | The Regents Of The University Of California | Robotic device with compact joint design and an additional degree of freedom and related systems and methods |
| US12109079B2 (en) | 2016-11-22 | 2024-10-08 | Board Of Regents Of The University Of Nebraska | Gross positioning device and related systems and methods |
| US11357595B2 (en) | 2016-11-22 | 2022-06-14 | Board Of Regents Of The University Of Nebraska | Gross positioning device and related systems and methods |
| US11813124B2 (en) | 2016-11-22 | 2023-11-14 | Board Of Regents Of The University Of Nebraska | Gross positioning device and related systems and methods |
| US11284958B2 (en) | 2016-11-29 | 2022-03-29 | Virtual Incision Corporation | User controller with user presence detection and related systems and methods |
| US10722319B2 (en) | 2016-12-14 | 2020-07-28 | Virtual Incision Corporation | Releasable attachment device for coupling to medical devices and related systems and methods |
| US11786334B2 (en) | 2016-12-14 | 2023-10-17 | Virtual Incision Corporation | Releasable attachment device for coupling to medical devices and related systems and methods |
| US11974824B2 (en) | 2017-09-27 | 2024-05-07 | Virtual Incision Corporation | Robotic surgical devices with tracking camera technology and related systems and methods |
| US11051894B2 (en) | 2017-09-27 | 2021-07-06 | Virtual Incision Corporation | Robotic surgical devices with tracking camera technology and related systems and methods |
| US12343098B2 (en) | 2017-09-27 | 2025-07-01 | Virtual Incision Corporation | Robotic surgical devices with tracking camera technology and related systems and methods |
| US11872008B2 (en) | 2017-11-01 | 2024-01-16 | Makoto Jinno | Manipulator and surgery supporting robot system |
| US12303221B2 (en) | 2018-01-05 | 2025-05-20 | Board Of Regents Of The University Of Nebraska | Single-arm robotic device with compact joint design and related systems and methods |
| US11950867B2 (en) | 2018-01-05 | 2024-04-09 | Board Of Regents Of The University Of Nebraska | Single-arm robotic device with compact joint design and related systems and methods |
| US11013564B2 (en) | 2018-01-05 | 2021-05-25 | Board Of Regents Of The University Of Nebraska | Single-arm robotic device with compact joint design and related systems and methods |
| US11504196B2 (en) | 2018-01-05 | 2022-11-22 | Board Of Regents Of The University Of Nebraska | Single-arm robotic device with compact joint design and related systems and methods |
| US11903658B2 (en) | 2019-01-07 | 2024-02-20 | Virtual Incision Corporation | Robotically assisted surgical system and related devices and methods |
| US12150722B2 (en) | 2020-07-06 | 2024-11-26 | Virtual Incision Corporation | Surgical robot positioning system and related devices and methods |
Also Published As
| Publication number | Publication date |
|---|---|
| US20010018591A1 (en) | 2001-08-30 |
| US6692485B1 (en) | 2004-02-17 |
| US6432112B2 (en) | 2002-08-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6197017B1 (en) | Articulated apparatus for telemanipulator system | |
| US6432112B2 (en) | Articulated apparatus for telemanipulator system | |
| WO2002051329A1 (en) | Tendon actuated articulated members for a telemanipulator system | |
| US9999473B2 (en) | Articulated surgical instrument for performing minimally invasive surgery with enhanced dexterity and sensitivity | |
| EP2439671B1 (en) | Microwrist system for surgical procedures | |
| US5797900A (en) | Wrist mechanism for surgical instrument for performing minimally invasive surgery with enhanced dexterity and sensitivity | |
| US8864794B2 (en) | Surgical instrument with a universal wrist | |
| CA2255692C (en) | Force-reflecting surgical instrument and positioning mechanism for performing minimally invasive surgery with enhanced dexterity and sensitivity | |
| EP1176921B1 (en) | Surgical instrument | |
| Phee et al. | Robotic system for no‐scar gastrointestinal surgery | |
| US6312435B1 (en) | Surgical instrument with extended reach for use in minimally invasive surgery | |
| US6746443B1 (en) | Roll-pitch-roll surgical tool | |
| US8613230B2 (en) | Force sensing for surgical instruments | |
| US9839439B2 (en) | Rotary input lever gimbal | |
| US8945095B2 (en) | Force and torque sensing for surgical instruments | |
| US7398707B2 (en) | Roll-pitch-roll surgical tool | |
| WO1997043943A9 (en) | Force-reflecting surgical instrument and positioning mechanism for performing minimally invasive surgery with enhanced dexterity and sensitivity | |
| JP3679440B2 (en) | Medical manipulator |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| AS | Assignment | Owner name:ENDOVIA MEDICAL INC., MASSACHUSETTS Free format text:CHANGE OF NAME;ASSIGNOR:BROCK ROGERS SURGICAL, INC.;REEL/FRAME:013448/0923 Effective date:20020621 | |
| STCB | Information on status: application discontinuation | Free format text:ABANDONED -- FAILURE TO RESPOND TO AN OFFICE ACTION |