US20010020200A1 - Tool actuation and force feedback on robot-assisted microsurgery system - Google Patents
Tool actuation and force feedback on robot-assisted microsurgery systemDownload PDFInfo
- Publication number
- US20010020200A1 US20010020200A1US09/858,673US85867301AUS2001020200A1US 20010020200 A1US20010020200 A1US 20010020200A1US 85867301 AUS85867301 AUS 85867301AUS 2001020200 A1US2001020200 A1US 2001020200A1
- Authority
- US
- United States
- Prior art keywords
- manipulator
- robot
- force
- joint
- joints
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/016—Input arrangements with force or tactile feedback as computer generated output to the user
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Leader-follower robots
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/76—Manipulators having means for providing feel, e.g. force or tactile feedback
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1679—Programme controls characterised by the tasks executed
- B25J9/1689—Teleoperation
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/01—Input arrangements or combined input and output arrangements for interaction between user and computer
- G06F3/011—Arrangements for interaction with the human body, e.g. for user immersion in virtual reality
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40144—Force sensation feedback from slave
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/40—Robotics, robotics mapping to robotics vision
- G05B2219/40193—Micromanipulation
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B2219/00—Program-control systems
- G05B2219/30—Nc systems
- G05B2219/45—Nc applications
- G05B2219/45123—Electrogoniometer, neuronavigator, medical robot used by surgeon to operate
Definitions
- the present specificationgenerally relates to robotic devices and particularly to a mechanically decoupled six-degree-of-freedom tele-operated robot system.
- Robotic devicesare commonly used in factory-based environments to complete tasks such as placing parts, welding, spray painting, etc. These devices are used for a variety of tasks. Many of the robotic devices do not have completely mechanically-decoupled axes with passed actuation for transferring actuation through one joint in order to actuate another joint, without affecting the motion of any other joints. Also, the devices are large and bulky and cannot effectively perform small-scale tasks, such as microsurgical operations. In addition, these devices are not tendon-driven systems, and thus, do not have low backlash, which is desirable for microsurgical operations.
- a decoupled six-degree-of-freedom robot systemis disclosed in U.S. Pat. Nos. 5,710,870 and 5,784,542, issued to Ohm et al.
- the robot systemhas an input device functioning as a master to control a slave robot with passed actuation capabilities, high dexterity, six degrees-of-freedom with all six axes being completely mechanically decoupled, low inertia, low frictional aspect, and force-feedback capabilities.
- the robot systemdisclosed in the above-referenced patents, is a tendon-driven system without any backlash, and is therefore capable of precisely positioning surgical instruments for performing microsurgical operations.
- the inventors noticed, as a result of several simulated microsurgical operations, that the integration of a high precision micromanipulator with a highly sensitive force sensor to the slave robot can enhance the surgeons feel of soft tissues. This allows effective performance of microsurgical tasks with resolution of the hand motion less than 10 microns.
- the force sensor readingsare used to amplify forces with high resolution to an input device on the master control. The amplified forces allow the surgeon operating the master control handle to feel the soft tissues with greater sensitivity and to move the handle with exaggeration and precision.
- the push button switches mounted on the master control handleprovides operator control of system enable and the micromanipulator.
- the present disclosureinvolves robot-assisted tasks for use in microsurgery.
- An input control device with force sensorsis configured to sense hand movements of an operator. The sensed hand movements actuate a mechanically decoupled robot manipulator.
- a microsurgical manipulator, attached to the robot manipulator,is activated to move small objects and perform microsurgical tasks.
- a force-feedback element coupled to the robot manipulator and the input control deviceprovides the input control device with an amplified sense of touch in the microsurgical manipulator.
- the input control devicehas a handle with activation switches to enable or disable control of the robot manipulator.
- the activation switchesalso allow movement of the microsurgical manipulator.
- a virtual reality systemin another aspect, includes a plurality of input control devices configured to sense operator body movements.
- Each devicehas a plurality of joints that are mechanically decoupled for transferring force sensed actuation through one joint in order to actuate another joint, without affecting the motion of any other joints.
- the operator body movementsare translated into corresponding movements in a virtual reality environment.
- a plurality of force-feedback elementsprovides the input control devices with feedback of the senses created in the virtual reality environment.
- a virtual augmentation system to a real-environment configurationincludes a plurality of input control devices configured to sense operator body movements.
- Each devicehas a plurality of joints that are mechanically decoupled, where the operator body movements are translated into corresponding movements in a real environment with certain limitations placed on the movements by a virtual reality environment.
- a plurality of force-feedback elementsprovides the input control device with feedback of the senses created in the virtual reality environment to limit movements in the real environment.
- a microsurgical training systemincludes a master input control device configured to sense operator body movements.
- the systemalso includes at least one force-feedback element coupled to the master input control device and at least one slave device coupled to the force-feedback element.
- the force-feedback elementis configured to receive the operator body movements from the master input control device. The operator body movements of the master input control device are replicated in the slave device.
- a data collection and storage deviceis coupled to the master input control device.
- the data collection and storage deviceis used to collect and store the operator body movements for subsequent replay.
- FIG. 1is an overview block diagram of components of the robot-assisted microsurgery (RAMS) system.
- RAMSrobot-assisted microsurgery
- FIG. 2is a perspective view of a slave robot arm.
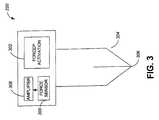
- FIG. 3is one embodiment of the end effector of the slave robot arm.
- FIG. 4is a perspective view of a master control device.
- FIG. 5is a front view of a master control device handle.
- FIG. 6is a block diagram of a master handle switch interface board.
- FIG. 7is one embodiment of the RAMS system illustrating the advantages of compact size and lightweight.
- FIG. 8illustrates a simulated eye microsurgery procedure using the RAMS system.
- Micro-surgeonsoften use a microscope with 20 to 100 times magnification to help them visualize their microscopic work area.
- the microsurgical operations performed by these surgeonsrequire manipulation of skin and tissue on the order of about 50 microns.
- a microsurgical manipulatorsuch as micro-forceps, can often scale down the surgeon's hand motions to less than 10 microns. This allows the average surgeon to perform at the level of the best surgeons with high levels of dexterity. In addition, the best surgeons will be able to perform surgical procedures beyond the capability of human hand dexterity.
- the integration of the high precision microsurgical manipulator with a highly sensitive force sensor to the slave robotenhances the surgeon's feel of soft tissues and allows effective performance of microsurgical tasks with resolution of the hand motion less than 10 microns.
- the force sensor readingsare used to amplify forces with high resolution to an input device on the master control.
- the amplified forcesallow the surgeon operating the master control handle to feel the soft tissues with greater sensitivity and to move the handle with greater exaggeration and precision.
- FIG. 1shows an overview block diagram of components of the robot-assisted microsurgery (RAMS) system.
- the components of the RAMS systemhave been categorized into four subsystems. They are the mechanical subsystem 102 , the electronics subsystem 104 , the servo-control and high-level software subsystem 106 and the user interface subsystem 108 .
- the mechanical subsystem 102includes a master control system 110 with an input device 112 and a slave robot arm 114 with associated motors, encoders, gears, cables, pulleys and linkages that cause the tip 116 of the slave robot to move under computer control and to measure the surgeon's hand motions precisely.
- the subsystem 102also includes slave and master force sensor interfaces 126 , 128 , and a master input device handle switch interface 150 .
- the electronics subsystem 104ensures that a number of error conditions are handled gracefully.
- Components of the electronics subsystem 104are a Versa Module EuroCard (VME) chassis 120 , an amplifier chassis 122 and safety electronics 124 .
- VMEVersa Module EuroCard
- the VME chassis 120contains VME processor boards 130 used for high-level system control.
- the VME chassis 120also contains two sets of Programmable Multi-Axis Controller (PMAC) servo-control cards 134 , power supplies, and two cable interface boards 132 .
- PMACProgrammable Multi-Axis Controller
- the amplifier chassis 122contains the six slave robot motor drive amplifiers 140 and three master control device motor drive amplifiers 142 .
- the amplifier chassis 122also includes a system control electronics board 144 and an amplifier power supply 146 .
- the safety control electronics 124includes the control electronics board and brake relay board. The purpose of the braking function is to hold the motors in place when they are not under amplifier control.
- Programmable logic devices (PLDs) in the safety control electronics module 124monitors amplifier power, operator control buttons and the HALT button, and a watchdog signal from the high-level software and control processor. Any anomaly triggers brakes to be set on the slave robot joint and a fault LED to be lighted. The operator must reset the safety control electronics to re-activate the system.
- PLDsProgrammable logic devices
- the servo-control and high-level software subsystem 106is implemented in hardware and software.
- the subsystem 106includes servo-control boards 134 and the computational processor boards 130 .
- Servo-control software functionsinclude setting-up the control parameters and running the servo-loop on the servo-control boards 134 to control the six motors, implementing the communication between the computation and servo-control boards 134 , initializing the servo-control system and communicating with the electronics subsystem 104 and the user interface subsystem 108 .
- the user interface subsystem 108interfaces with a user, controls initialization of the system software and hardware, implements a number of demonstration modes of robot control and computes both the forward and inverse kinematics.
- GUIgraphic user interface
- FIG. 2shows the slave robot arm 114 .
- the arm 114is a six degrees-of-freedom tendon-driven robotic arm designed to be compact yet exhibit very precise relative positioning capability as well as maintain a very high work volume. Physically, the arm measures 2.5 cm in diameter and is 25 cm long from its base 200 to the tip 202 .
- the arm 114is mounted to a cylindrical base housing 200 that measures 12 cm in diameter by 18 cm long that contains all of the drives that actuate the arm.
- the joints of the arm 114include a torso joint 204 , a shoulder joint 206 , an elbow joint 208 , and a wrist joint 210 .
- the torso joint 204rotates about an axis aligned with the base axis 212 and positioned at the point the arm 114 emerges from its base 200 .
- the shoulder joint 206rotates about two axes 214 that are in the same plane and perpendicular to the preceding links.
- the elbow joint 206also rotates about two axes 216 that are in the same plane and perpendicular to the preceding links.
- the wrist joint 210makes three-axes rotations called pitch, yaw and roll rotations.
- the slave wrist 210 designutilizes a dual universal joint to give a three degrees-of-freedom, singularity free, mechanically decoupled joint that operates in a full hemisphere of motion.
- the master wrist 210 designuses a universal joint to transmit rotation motion through the joint while allowing pitch and yaw motions about the joint resulting in singularity free motion over a smaller range of motion in three degrees-of-freedom.
- FIG. 3shows one embodiment of the end effector 220 of the slave robot.
- the end effector 220is force sensor instrumented micro-forceps 304 actuated by a miniature DC motor 302 . Simultaneous sensing of force interactions at the robot tip 306 and manipulation with the forceps 304 is possible with the end effector 220 . Force interactions measured with the force sensor 300 are amplified, processed and used to drive the master arm to amplify the sense of touch at the master handle by an amplifier 308 .
- FIG. 4shows a master control device 110 similar to the slave robot 114 .
- the device 110also has six tendon-driven joints.
- the master control device 110is 2.5 cm in diameter and 25 cm long.
- the base 400 of the master control device 110houses high-resolution optical encoders for position sensing. Since the smallest incremental movement during microsurgery is about 10 microns, 10 encoder counts is the minimum desirable incremental movement. As a result, one encoder count corresponds to one-micron movement at the tip of the end effector 306 . High-resolution encoders are necessary for reducing the amount of gearing necessary to achieve the required positional resolution while limiting friction.
- the base 400preferably includes three arm motors and three wrist motors to create the force-feedback capability on the torso 402 , shoulder 404 , and elbow 406 axes, and the three-axis wrist 408 , respectively.
- the wrist 408is coupled to a six-axis force sensor 410 that is coupled to a handle 412 .
- FIG. 5shows the master control device handle 412 .
- the enable switch 500enables operator control of the system.
- the open switch 502 and the close switch 504control the microsurgical manipulator 304 at the tip of the end effector 306 by opening and closing the micro-forceps 304 , respectively.
- FIG. 6shows a block diagram of a master handle switch interface board 150 .
- One switch 600is used to inform the system computer that slave motion should be enabled.
- the output circuitis a relay 606 that turns system enable on or off.
- the other two switches 602 , 604are used to cause the slave robot manipulator 304 to move in with one switch and out with the other and no motion if both or neither are activated.
- the switches 600 , 602 , 604each have a resistor in series with its contacts. All switch-resistor pairs are connected in parallel providing a two-terminal switch sensor circuit connecting the nodes 610 and 612 .
- the resistorsare selected with different weighting values so that each switch has a different effect on the total resistance of the switch sensor.
- the switch sensor circuitis one element in a two-element voltage divider network. When different switches and combinations of switches are activated the voltage divider output changes.
- the voltage divider network output changesare measured by a 7 -bit analog-to-digital converter (ADC) 614 .
- the numbers generated by the ADC outputreflect the condition of the switches that are activated.
- the ADC numbersare decoded into eight discrete ranges using a lookup table 616 .
- the statesare modified in the decode logic to eliminate unwanted conditions. For example, both motor direction activated will cause no motor action.
- the enable output circuitis a single-pole-double-throw relay 606 whose contacts are wired to an input port on the main computer.
- the motor driver outputhas two bipolar drivers 608 that can drive the motor in either direction or not at all.
- FIG. 7shows one embodiment of the RAMS system.
- the figureillustrates the advantages of compact size and lightweight.
- the entire electronics and servo-control subsystems containing the VME chassis, the amplifier chassis and the force-control boardsare installed on a movable rack 700 .
- a computersuch as a laptop 702 , can be placed on top of the rack 700 .
- the slave robot 704 and the master control device 706can be placed around an operating table with interface cables connecting them to the rack 700 .
- RAMS systemadvantages include easy manipulation of the slave robot arm and manipulator, large work envelope, decoupled joints, low backlash, and low stiction.
- the slave robot arm and manipulatorcan be easily maneuvered using the master input device handle and the push-button switches.
- the switch operated indexed motionallows the surgeon to efficiently control the robot arm and manipulator.
- the RAMS systemprovides a large work envelope because each joint of the slave robot arm 114 has a large range of motion.
- the torsohas 165 degrees of motion while both the shoulder and elbow have a full 360 degrees of motion. This high range of motion is attained by the double-jointed scheme.
- the wrist designhas 180 degrees of pitch and yaw with 540 degrees of roll. Such large motion ranges increases the work volume and reduces the chance of a joint reaching a limit during operation.
- the RAMS systemprovides low backlash by using dual drive trains that are pre-loaded relative to one another. Low backlash is essential for doing fine manipulations. Five of the six degrees-of-freedom have zero backlash and the sixth, which is a result of the wrist design, has low backlash.
- the RAMS systemalso provides low stiction with an incorporation of precision ball bearings in every rotating location of the robot. This reduces metal-to-metal sliding and minimizes stiction. Low stiction is effective in providing small incremental movements without overshooting or instability.
- FIG. 8illustrates a simulated eye microsurgery procedure successfully conducted using the RAMS system. The procedure demonstrated was the removal of a microscopic 0.015-inch diameter particle from a simulated eyeball 800 .
- the RAMS systemwas demonstrated in other procedures, including a dual-arm suturing procedure. Two RAMS systems were configured as left and right arms to successfully perform a nylon suture to close a 1.5 mm long puncture in a thin sheet of latex rubber.
- the RAMS systemcan be used in many other applications such as a haptic device in virtual reality (VR) system, synthetic fixtures or virtual augmentation to the real environment, a simulator to train for microsurgical procedures, and a data collection system for measuring the hand motions made by an operator.
- VRvirtual reality
- the master control armis a unique haptic device that presents virtual or real force interaction to the user related to touch perception and feedback.
- the master control arms' ability to measure hand motions to less than 10 microns in translation and to 0.07 degrees in orientation and its pencil graspmake it ideal as an interface for positioning and feeling of a probe in a virtual environment.
- the synthetic fixtures or virtual augmentation to the real environmentis implemented on the RAMS system to assist the user in performing complex tasks.
- constraints on the motion of the slave robotare implemented to allow the surgical instrument mounted on the slave robot to pivot freely about the entry point in the eyeball. Activation of this mode causes loss of user control in two degrees of freedom of the slave robot.
- the automated control systemprevents motion that moves the instrument against the eyeball wall.
- the user interface part of the RAMS systemcan be used as a simulator to train for microsurgical procedures.
- Expert guidance to a novice surgeoncan be implemented by replicating the expert motions of a master device on a similar device held by the novice.
- the RAMS systemalso can be used as a data collection system for measuring the hand motions made by an operator of the system. This data is useful for characterizing the performance of the user. Much may be learned from analysis and characterization of the collected data including evaluation of the potential microsurgical abilities of surgical residents, prediction of the skill-level of a surgeon at any time or providing some insight into the nature of highly skilled manual dexterity.
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Robotics (AREA)
- General Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- General Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Human Computer Interaction (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
Description
- This application is a continuation of U.S. patent application Ser. No. 09/292,761, filed Apr. 14, 1999 and issued as U.S. Pat. No. 6,233,504 on May 15, 2001, which claims benefit of the priority of U.S. Provisional Application Serial No. 60/082,013, filed Apr. 16, 1998 and entitled “A Tool Actuation and Force Feedback on Robot Assisted Microsurgery System.”[0001]
- The invention described herein was made in performance of work under a NASA contract, and is subject to the provisions of Public Law 96-517 (35 U.S.C. 202) in which the Contractor has elected to retain title.[0002]
- The present specification generally relates to robotic devices and particularly to a mechanically decoupled six-degree-of-freedom tele-operated robot system.[0003]
- Robotic devices are commonly used in factory-based environments to complete tasks such as placing parts, welding, spray painting, etc. These devices are used for a variety of tasks. Many of the robotic devices do not have completely mechanically-decoupled axes with passed actuation for transferring actuation through one joint in order to actuate another joint, without affecting the motion of any other joints. Also, the devices are large and bulky and cannot effectively perform small-scale tasks, such as microsurgical operations. In addition, these devices are not tendon-driven systems, and thus, do not have low backlash, which is desirable for microsurgical operations.[0004]
- A decoupled six-degree-of-freedom robot system is disclosed in U.S. Pat. Nos. 5,710,870 and 5,784,542, issued to Ohm et al. The robot system has an input device functioning as a master to control a slave robot with passed actuation capabilities, high dexterity, six degrees-of-freedom with all six axes being completely mechanically decoupled, low inertia, low frictional aspect, and force-feedback capabilities.[0005]
- The robot system, disclosed in the above-referenced patents, is a tendon-driven system without any backlash, and is therefore capable of precisely positioning surgical instruments for performing microsurgical operations.[0006]
- The inventors noticed, as a result of several simulated microsurgical operations, that the integration of a high precision micromanipulator with a highly sensitive force sensor to the slave robot can enhance the surgeon=s feel of soft tissues. This allows effective performance of microsurgical tasks with resolution of the hand motion less than 10 microns. The force sensor readings are used to amplify forces with high resolution to an input device on the master control. The amplified forces allow the surgeon operating the master control handle to feel the soft tissues with greater sensitivity and to move the handle with exaggeration and precision. In addition, the push button switches mounted on the master control handle provides operator control of system enable and the micromanipulator.[0007]
- In one aspect, the present disclosure involves robot-assisted tasks for use in microsurgery. An input control device with force sensors is configured to sense hand movements of an operator. The sensed hand movements actuate a mechanically decoupled robot manipulator. A microsurgical manipulator, attached to the robot manipulator, is activated to move small objects and perform microsurgical tasks. A force-feedback element coupled to the robot manipulator and the input control device provides the input control device with an amplified sense of touch in the microsurgical manipulator.[0008]
- In some embodiments, the input control device has a handle with activation switches to enable or disable control of the robot manipulator. The activation switches also allow movement of the microsurgical manipulator.[0009]
- In another aspect, a virtual reality system is disclosed. The virtual reality system includes a plurality of input control devices configured to sense operator body movements. Each device has a plurality of joints that are mechanically decoupled for transferring force sensed actuation through one joint in order to actuate another joint, without affecting the motion of any other joints. The operator body movements are translated into corresponding movements in a virtual reality environment. A plurality of force-feedback elements provides the input control devices with feedback of the senses created in the virtual reality environment.[0010]
- In further aspect, a virtual augmentation system to a real-environment configuration is disclosed. The system includes a plurality of input control devices configured to sense operator body movements. Each device has a plurality of joints that are mechanically decoupled, where the operator body movements are translated into corresponding movements in a real environment with certain limitations placed on the movements by a virtual reality environment. A plurality of force-feedback elements provides the input control device with feedback of the senses created in the virtual reality environment to limit movements in the real environment.[0011]
- In further aspect, a microsurgical training system is disclosed. The system includes a master input control device configured to sense operator body movements. The system also includes at least one force-feedback element coupled to the master input control device and at least one slave device coupled to the force-feedback element. The force-feedback element is configured to receive the operator body movements from the master input control device. The operator body movements of the master input control device are replicated in the slave device.[0012]
- In one embodiment, a data collection and storage device is coupled to the master input control device. The data collection and storage device is used to collect and store the operator body movements for subsequent replay.[0013]
- The details of one or more embodiments are set forth in the accompanying drawings and the description below. Other embodiments and advantages will become apparent from the following description and drawings, and from the claims.[0014]
- These and other aspects will be described in reference to the accompanying drawings wherein:[0015]
- FIG. 1 is an overview block diagram of components of the robot-assisted microsurgery (RAMS) system.[0016]
- FIG. 2 is a perspective view of a slave robot arm.[0017]
- FIG. 3 is one embodiment of the end effector of the slave robot arm.[0018]
- FIG. 4 is a perspective view of a master control device.[0019]
- FIG. 5 is a front view of a master control device handle.[0020]
- FIG. 6 is a block diagram of a master handle switch interface board.[0021]
- FIG. 7 is one embodiment of the RAMS system illustrating the advantages of compact size and lightweight.[0022]
- FIG. 8 illustrates a simulated eye microsurgery procedure using the RAMS system.[0023]
- Like reference numbers and designations in the various drawings indicate like elements.[0024]
- Micro-surgeons often use a microscope with 20 to 100 times magnification to help them visualize their microscopic work area. The microsurgical operations performed by these surgeons require manipulation of skin and tissue on the order of about 50 microns. A microsurgical manipulator, such as micro-forceps, can often scale down the surgeon's hand motions to less than 10 microns. This allows the average surgeon to perform at the level of the best surgeons with high levels of dexterity. In addition, the best surgeons will be able to perform surgical procedures beyond the capability of human hand dexterity. The integration of the high precision microsurgical manipulator with a highly sensitive force sensor to the slave robot enhances the surgeon's feel of soft tissues and allows effective performance of microsurgical tasks with resolution of the hand motion less than 10 microns.[0025]
- The force sensor readings are used to amplify forces with high resolution to an input device on the master control. The amplified forces allow the surgeon operating the master control handle to feel the soft tissues with greater sensitivity and to move the handle with greater exaggeration and precision.[0026]
- FIG. 1 shows an overview block diagram of components of the robot-assisted microsurgery (RAMS) system. The components of the RAMS system have been categorized into four subsystems. They are the[0027]
mechanical subsystem 102, theelectronics subsystem 104, the servo-control and high-level software subsystem 106 and theuser interface subsystem 108. - The[0028]
mechanical subsystem 102 includes amaster control system 110 with aninput device 112 and aslave robot arm 114 with associated motors, encoders, gears, cables, pulleys and linkages that cause thetip 116 of the slave robot to move under computer control and to measure the surgeon's hand motions precisely. Thesubsystem 102 also includes slave and master force sensor interfaces126,128, and a master input devicehandle switch interface 150. - The electronics subsystem[0029]104 ensures that a number of error conditions are handled gracefully. Components of the
electronics subsystem 104 are a Versa Module EuroCard (VME)chassis 120, anamplifier chassis 122 andsafety electronics 124. - The[0030]
VME chassis 120 containsVME processor boards 130 used for high-level system control. TheVME chassis 120 also contains two sets of Programmable Multi-Axis Controller (PMAC) servo-control cards 134, power supplies, and twocable interface boards 132. - The[0031]
amplifier chassis 122 contains the six slave robotmotor drive amplifiers 140 and three master control devicemotor drive amplifiers 142. Theamplifier chassis 122 also includes a systemcontrol electronics board 144 and an amplifier power supply146. - The[0032]
safety control electronics 124 includes the control electronics board and brake relay board. The purpose of the braking function is to hold the motors in place when they are not under amplifier control. Programmable logic devices (PLDs) in the safetycontrol electronics module 124 monitors amplifier power, operator control buttons and the HALT button, and a watchdog signal from the high-level software and control processor. Any anomaly triggers brakes to be set on the slave robot joint and a fault LED to be lighted. The operator must reset the safety control electronics to re-activate the system. - The servo-control and high-[0033]
level software subsystem 106 is implemented in hardware and software. Thesubsystem 106 includes servo-control boards 134 and thecomputational processor boards 130. Servo-control software functions include setting-up the control parameters and running the servo-loop on the servo-control boards 134 to control the six motors, implementing the communication between the computation and servo-control boards 134, initializing the servo-control system and communicating with theelectronics subsystem 104 and theuser interface subsystem 108. - The[0034]
user interface subsystem 108 interfaces with a user, controls initialization of the system software and hardware, implements a number of demonstration modes of robot control and computes both the forward and inverse kinematics. - In one embodiment of the[0035]
subsystem 108, the user specifies the control modes of the system through a graphic user interface (GUI) implemented on a computer system, such as a personal computer (PC) or a workstation. Commands entered into the GUI are transmitted over an Ethernet connection or by a serial interface and are received on the real-time software side of the system. - FIG. 2 shows the[0036]
slave robot arm 114. Thearm 114 is a six degrees-of-freedom tendon-driven robotic arm designed to be compact yet exhibit very precise relative positioning capability as well as maintain a very high work volume. Physically, the arm measures 2.5 cm in diameter and is 25 cm long from itsbase 200 to thetip 202. Thearm 114 is mounted to acylindrical base housing 200 that measures 12 cm in diameter by 18 cm long that contains all of the drives that actuate the arm. - The joints of the[0037]
arm 114 include a torso joint204, ashoulder joint 206, an elbow joint208, and awrist joint 210. The torso joint204 rotates about an axis aligned with thebase axis 212 and positioned at the point thearm 114 emerges from itsbase 200. Theshoulder joint 206 rotates about twoaxes 214 that are in the same plane and perpendicular to the preceding links. The elbow joint206 also rotates about twoaxes 216 that are in the same plane and perpendicular to the preceding links. The wrist joint210 makes three-axes rotations called pitch, yaw and roll rotations. - The[0038]
slave wrist 210 design utilizes a dual universal joint to give a three degrees-of-freedom, singularity free, mechanically decoupled joint that operates in a full hemisphere of motion. Themaster wrist 210 design uses a universal joint to transmit rotation motion through the joint while allowing pitch and yaw motions about the joint resulting in singularity free motion over a smaller range of motion in three degrees-of-freedom. - FIG. 3 shows one embodiment of the[0039]
end effector 220 of the slave robot. Theend effector 220 is force sensor instrumented micro-forceps304 actuated by aminiature DC motor 302. Simultaneous sensing of force interactions at therobot tip 306 and manipulation with theforceps 304 is possible with theend effector 220. Force interactions measured with theforce sensor 300 are amplified, processed and used to drive the master arm to amplify the sense of touch at the master handle by anamplifier 308. - FIG. 4 shows a[0040]
master control device 110 similar to theslave robot 114. Thedevice 110 also has six tendon-driven joints. Themaster control device 110 is 2.5 cm in diameter and 25 cm long. Thebase 400 of themaster control device 110 houses high-resolution optical encoders for position sensing. Since the smallest incremental movement during microsurgery is about 10 microns, 10 encoder counts is the minimum desirable incremental movement. As a result, one encoder count corresponds to one-micron movement at the tip of theend effector 306. High-resolution encoders are necessary for reducing the amount of gearing necessary to achieve the required positional resolution while limiting friction. - In addition, the base[0041]400 preferably includes three arm motors and three wrist motors to create the force-feedback capability on the
torso 402,shoulder 404, and elbow406 axes, and the three-axis wrist 408, respectively. Thewrist 408 is coupled to a six-axis force sensor 410 that is coupled to ahandle 412. - FIG. 5 shows the master[0042]
control device handle 412. There are three push button switches mounted on thehandle 412 which provide operator control of the system and the opening and closing of the micro-forceps304 on theslave robot arm 220. The enableswitch 500 enables operator control of the system. Theopen switch 502 and theclose switch 504 control themicrosurgical manipulator 304 at the tip of theend effector 306 by opening and closing the micro-forceps304, respectively. - FIG. 6 shows a block diagram of a master handle[0043]
switch interface board 150. Oneswitch 600 is used to inform the system computer that slave motion should be enabled. The output circuit is arelay 606 that turns system enable on or off. The other twoswitches slave robot manipulator 304 to move in with one switch and out with the other and no motion if both or neither are activated. - The[0044]
switches nodes - The voltage divider network output changes are measured by a[0045]7-bit analog-to-digital converter (ADC)614. The numbers generated by the ADC output reflect the condition of the switches that are activated. The ADC numbers are decoded into eight discrete ranges using a lookup table616. The states are modified in the decode logic to eliminate unwanted conditions. For example, both motor direction activated will cause no motor action.
- The enable output circuit is a single-pole-double-[0046]
throw relay 606 whose contacts are wired to an input port on the main computer. The motor driver output has twobipolar drivers 608 that can drive the motor in either direction or not at all. - FIG. 7 shows one embodiment of the RAMS system. The figure illustrates the advantages of compact size and lightweight. The entire electronics and servo-control subsystems containing the VME chassis, the amplifier chassis and the force-control boards are installed on a[0047]
movable rack 700. A computer, such as alaptop 702, can be placed on top of therack 700. Theslave robot 704 and themaster control device 706 can be placed around an operating table with interface cables connecting them to therack 700. - Other advantages of the RAMS system include easy manipulation of the slave robot arm and manipulator, large work envelope, decoupled joints, low backlash, and low stiction.[0048]
- The slave robot arm and manipulator can be easily maneuvered using the master input device handle and the push-button switches. The switch operated indexed motion allows the surgeon to efficiently control the robot arm and manipulator.[0049]
- The RAMS system provides a large work envelope because each joint of the[0050]
slave robot arm 114 has a large range of motion. The torso has 165 degrees of motion while both the shoulder and elbow have a full 360 degrees of motion. This high range of motion is attained by the double-jointed scheme. The wrist design has 180 degrees of pitch and yaw with 540 degrees of roll. Such large motion ranges increases the work volume and reduces the chance of a joint reaching a limit during operation. - The mechanically decoupled slave and master arm joints of the RAMS system simplifies kinematic computations. Furthermore, mechanically decoupled joints provide partial functionality even with one joint failure.[0051]
- The RAMS system provides low backlash by using dual drive trains that are pre-loaded relative to one another. Low backlash is essential for doing fine manipulations. Five of the six degrees-of-freedom have zero backlash and the sixth, which is a result of the wrist design, has low backlash.[0052]
- The RAMS system also provides low stiction with an incorporation of precision ball bearings in every rotating location of the robot. This reduces metal-to-metal sliding and minimizes stiction. Low stiction is effective in providing small incremental movements without overshooting or instability.[0053]
- FIG. 8 illustrates a simulated eye microsurgery procedure successfully conducted using the RAMS system. The procedure demonstrated was the removal of a microscopic 0.015-inch diameter particle from a[0054]
simulated eyeball 800. - The RAMS system was demonstrated in other procedures, including a dual-arm suturing procedure. Two RAMS systems were configured as left and right arms to successfully perform a nylon suture to close a 1.5 mm long puncture in a thin sheet of latex rubber.[0055]
- The RAMS system can be used in many other applications such as a haptic device in virtual reality (VR) system, synthetic fixtures or virtual augmentation to the real environment, a simulator to train for microsurgical procedures, and a data collection system for measuring the hand motions made by an operator.[0056]
- Although the RAMS system was not developed as a VR system, components of the RAMS system are applicable in the VR system. In one application, the master control arm is a unique haptic device that presents virtual or real force interaction to the user related to touch perception and feedback. The master control arms' ability to measure hand motions to less than 10 microns in translation and to 0.07 degrees in orientation and its pencil grasp make it ideal as an interface for positioning and feeling of a probe in a virtual environment.[0057]
- In another application, the synthetic fixtures or virtual augmentation to the real environment is implemented on the RAMS system to assist the user in performing complex tasks. For example, in the eye surgery procedure, constraints on the motion of the slave robot are implemented to allow the surgical instrument mounted on the slave robot to pivot freely about the entry point in the eyeball. Activation of this mode causes loss of user control in two degrees of freedom of the slave robot. The automated control system prevents motion that moves the instrument against the eyeball wall.[0058]
- In another application, the user interface part of the RAMS system can be used as a simulator to train for microsurgical procedures. Expert guidance to a novice surgeon can be implemented by replicating the expert motions of a master device on a similar device held by the novice.[0059]
- In further application, the RAMS system also can be used as a data collection system for measuring the hand motions made by an operator of the system. This data is useful for characterizing the performance of the user. Much may be learned from analysis and characterization of the collected data including evaluation of the potential microsurgical abilities of surgical residents, prediction of the skill-level of a surgeon at any time or providing some insight into the nature of highly skilled manual dexterity.[0060]
- Although only a few embodiments have been described in detail above, those of ordinary skill in the art certainly understand that modifications are possible. For example, as an alternative to constraining the motion of the slave robot in microsurgery procedure, forces can be simulated on the master handle that would guide the user into making safe motions. All such modifications are intended to be encompassed within the following claims, in which:[0061]
Claims (5)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US09/858,673US6385509B2 (en) | 1998-04-16 | 2001-05-15 | Tool actuation and force feedback on robot-assisted microsurgery system |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US8201398P | 1998-04-16 | 1998-04-16 | |
| US09/292,761US6233504B1 (en) | 1998-04-16 | 1999-04-14 | Tool actuation and force feedback on robot-assisted microsurgery system |
| US09/858,673US6385509B2 (en) | 1998-04-16 | 2001-05-15 | Tool actuation and force feedback on robot-assisted microsurgery system |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US09/292,761ContinuationUS6233504B1 (en) | 1998-04-16 | 1999-04-14 | Tool actuation and force feedback on robot-assisted microsurgery system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| US20010020200A1true US20010020200A1 (en) | 2001-09-06 |
| US6385509B2 US6385509B2 (en) | 2002-05-07 |
Family
ID=26766785
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US09/292,761Expired - LifetimeUS6233504B1 (en) | 1998-04-16 | 1999-04-14 | Tool actuation and force feedback on robot-assisted microsurgery system |
| US09/858,673Expired - LifetimeUS6385509B2 (en) | 1998-04-16 | 2001-05-15 | Tool actuation and force feedback on robot-assisted microsurgery system |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US09/292,761Expired - LifetimeUS6233504B1 (en) | 1998-04-16 | 1999-04-14 | Tool actuation and force feedback on robot-assisted microsurgery system |
Country Status (1)
| Country | Link |
|---|---|
| US (2) | US6233504B1 (en) |
Cited By (107)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6535793B2 (en)* | 2000-05-01 | 2003-03-18 | Irobot Corporation | Method and system for remote control of mobile robot |
| US20030216834A1 (en)* | 2000-05-01 | 2003-11-20 | Allard James R. | Method and system for remote control of mobile robot |
| ES2200679A1 (en)* | 2002-03-25 | 2004-03-01 | Univ Malaga | SYSTEM OF TELEOPERATION OF ROBOTS FOR TRANSURETRAL RESECTION OF THE PROSTATE. |
| US6738691B1 (en)* | 2001-05-17 | 2004-05-18 | The Stanley Works | Control handle for intelligent assist devices |
| US20050027397A1 (en)* | 1999-04-07 | 2005-02-03 | Intuitive Surgical, Inc. | Aspects of a control system of a minimally invasive surgical apparatus |
| US20050209734A1 (en)* | 2002-04-17 | 2005-09-22 | Michiharu Tanaka | Robot system and controller |
| WO2005043365A3 (en)* | 2003-10-30 | 2005-09-29 | Sensable Technologies Inc | Force reflecting haptic interface |
| US20060261770A1 (en)* | 2005-05-20 | 2006-11-23 | Kosuke Kishi | Master-slave manipulator system and this operation input devcies |
| US20080027590A1 (en)* | 2006-07-14 | 2008-01-31 | Emilie Phillips | Autonomous behaviors for a remote vehicle |
| US20080086241A1 (en)* | 2006-10-06 | 2008-04-10 | Irobot Corporation | Autonomous Behaviors for a Remove Vehicle |
| US20080147206A1 (en)* | 2004-08-30 | 2008-06-19 | Abb Ab | Control system for Real Time Applications for Cooperative Industrial Robots |
| US7441298B2 (en) | 2005-12-02 | 2008-10-28 | Irobot Corporation | Coverage robot mobility |
| US20090037033A1 (en)* | 2007-05-14 | 2009-02-05 | Emilie Phillips | Autonomous Behaviors for a Remote Vehicle |
| US20090065271A1 (en)* | 1998-03-27 | 2009-03-12 | Irobot Corporation | Robotic Platform |
| US20100191375A1 (en)* | 2009-01-29 | 2010-07-29 | Wright Timothy C | Documentation through a remote presence robot |
| US8000837B2 (en) | 2004-10-05 | 2011-08-16 | J&L Group International, Llc | Programmable load forming system, components thereof, and methods of use |
| US8005571B2 (en) | 2002-08-13 | 2011-08-23 | Neuroarm Surgical Ltd. | Microsurgical robot system |
| US8002767B2 (en)* | 2001-12-08 | 2011-08-23 | Intuitive Surgical Operations, Inc. | Multifunctional handle for a medical robotic system |
| US20120072024A1 (en)* | 2002-07-25 | 2012-03-22 | Yulun Wang | Telerobotic system with dual application screen presentation |
| US8239992B2 (en) | 2007-05-09 | 2012-08-14 | Irobot Corporation | Compact autonomous coverage robot |
| US8253368B2 (en) | 2004-01-28 | 2012-08-28 | Irobot Corporation | Debris sensor for cleaning apparatus |
| CN102825603A (en)* | 2012-09-10 | 2012-12-19 | 江苏科技大学 | Network teleoperation robot system and time delay overcoming method |
| US8368339B2 (en) | 2001-01-24 | 2013-02-05 | Irobot Corporation | Robot confinement |
| US8374721B2 (en) | 2005-12-02 | 2013-02-12 | Irobot Corporation | Robot system |
| US8380350B2 (en) | 2005-12-02 | 2013-02-19 | Irobot Corporation | Autonomous coverage robot navigation system |
| US8386081B2 (en) | 2002-09-13 | 2013-02-26 | Irobot Corporation | Navigational control system for a robotic device |
| US8382906B2 (en) | 2005-02-18 | 2013-02-26 | Irobot Corporation | Autonomous surface cleaning robot for wet cleaning |
| US8387193B2 (en) | 2005-02-18 | 2013-03-05 | Irobot Corporation | Autonomous surface cleaning robot for wet and dry cleaning |
| US8390251B2 (en) | 2004-01-21 | 2013-03-05 | Irobot Corporation | Autonomous robot auto-docking and energy management systems and methods |
| US8396611B2 (en) | 2006-07-14 | 2013-03-12 | Irobot Corporation | Autonomous behaviors for a remote vehicle |
| US8396592B2 (en) | 2001-06-12 | 2013-03-12 | Irobot Corporation | Method and system for multi-mode coverage for an autonomous robot |
| US20130069863A1 (en)* | 2011-09-20 | 2013-03-21 | Samsung Electronics Co. Ltd. | Tactile feedback apparatus, system, and method of operating tactile feedback apparatus |
| US8412377B2 (en) | 2000-01-24 | 2013-04-02 | Irobot Corporation | Obstacle following sensor scheme for a mobile robot |
| US8417383B2 (en) | 2006-05-31 | 2013-04-09 | Irobot Corporation | Detecting robot stasis |
| US8418303B2 (en) | 2006-05-19 | 2013-04-16 | Irobot Corporation | Cleaning robot roller processing |
| US8428778B2 (en) | 2002-09-13 | 2013-04-23 | Irobot Corporation | Navigational control system for a robotic device |
| US8463438B2 (en) | 2001-06-12 | 2013-06-11 | Irobot Corporation | Method and system for multi-mode coverage for an autonomous robot |
| US8474090B2 (en) | 2002-01-03 | 2013-07-02 | Irobot Corporation | Autonomous floor-cleaning robot |
| US8515578B2 (en) | 2002-09-13 | 2013-08-20 | Irobot Corporation | Navigational control system for a robotic device |
| US8584305B2 (en) | 2005-12-02 | 2013-11-19 | Irobot Corporation | Modular robot |
| US8594840B1 (en) | 2004-07-07 | 2013-11-26 | Irobot Corporation | Celestial navigation system for an autonomous robot |
| US8739355B2 (en) | 2005-02-18 | 2014-06-03 | Irobot Corporation | Autonomous surface cleaning robot for dry cleaning |
| US20140154041A1 (en)* | 2012-12-03 | 2014-06-05 | Kabushiki Kaisha Yaskawa Denki | Robot |
| US8768516B2 (en) | 2009-06-30 | 2014-07-01 | Intuitive Surgical Operations, Inc. | Control of medical robotic system manipulator about kinematic singularities |
| US8780342B2 (en) | 2004-03-29 | 2014-07-15 | Irobot Corporation | Methods and apparatus for position estimation using reflected light sources |
| US8788092B2 (en) | 2000-01-24 | 2014-07-22 | Irobot Corporation | Obstacle following sensor scheme for a mobile robot |
| US8800107B2 (en) | 2010-02-16 | 2014-08-12 | Irobot Corporation | Vacuum brush |
| US8836751B2 (en) | 2011-11-08 | 2014-09-16 | Intouch Technologies, Inc. | Tele-presence system with a user interface that displays different communication links |
| US8849679B2 (en) | 2006-06-15 | 2014-09-30 | Intouch Technologies, Inc. | Remote controlled robot system that provides medical images |
| WO2014088965A3 (en)* | 2012-12-03 | 2014-11-20 | Northeastern University | Apparatuses, systems and methods for force feedback |
| US8897920B2 (en) | 2009-04-17 | 2014-11-25 | Intouch Technologies, Inc. | Tele-presence robot system with software modularity, projector and laser pointer |
| US8902278B2 (en) | 2012-04-11 | 2014-12-02 | Intouch Technologies, Inc. | Systems and methods for visualizing and managing telepresence devices in healthcare networks |
| US8930023B2 (en) | 2009-11-06 | 2015-01-06 | Irobot Corporation | Localization by learning of wave-signal distributions |
| US8965579B2 (en) | 2011-01-28 | 2015-02-24 | Intouch Technologies | Interfacing with a mobile telepresence robot |
| US8972052B2 (en) | 2004-07-07 | 2015-03-03 | Irobot Corporation | Celestial navigation system for an autonomous vehicle |
| US8983174B2 (en) | 2004-07-13 | 2015-03-17 | Intouch Technologies, Inc. | Mobile robot with a head-based movement mapping scheme |
| US8996165B2 (en) | 2008-10-21 | 2015-03-31 | Intouch Technologies, Inc. | Telepresence robot with a camera boom |
| US9008835B2 (en) | 2004-06-24 | 2015-04-14 | Irobot Corporation | Remote control scheduler and method for autonomous robotic device |
| US9089972B2 (en) | 2010-03-04 | 2015-07-28 | Intouch Technologies, Inc. | Remote presence system including a cart that supports a robot face and an overhead camera |
| US9098611B2 (en) | 2012-11-26 | 2015-08-04 | Intouch Technologies, Inc. | Enhanced video interaction for a user interface of a telepresence network |
| US9138891B2 (en) | 2008-11-25 | 2015-09-22 | Intouch Technologies, Inc. | Server connectivity control for tele-presence robot |
| US9160783B2 (en) | 2007-05-09 | 2015-10-13 | Intouch Technologies, Inc. | Robot system that operates through a network firewall |
| US9174342B2 (en) | 2012-05-22 | 2015-11-03 | Intouch Technologies, Inc. | Social behavior rules for a medical telepresence robot |
| US9193065B2 (en) | 2008-07-10 | 2015-11-24 | Intouch Technologies, Inc. | Docking system for a tele-presence robot |
| US9198728B2 (en) | 2005-09-30 | 2015-12-01 | Intouch Technologies, Inc. | Multi-camera mobile teleconferencing platform |
| US9251313B2 (en) | 2012-04-11 | 2016-02-02 | Intouch Technologies, Inc. | Systems and methods for visualizing and managing telepresence devices in healthcare networks |
| US9264664B2 (en) | 2010-12-03 | 2016-02-16 | Intouch Technologies, Inc. | Systems and methods for dynamic bandwidth allocation |
| US9296107B2 (en) | 2003-12-09 | 2016-03-29 | Intouch Technologies, Inc. | Protocol for a remotely controlled videoconferencing robot |
| US20160089781A1 (en)* | 2014-09-30 | 2016-03-31 | Seiko Epson Corporation | Robot, control apparatus and robot system |
| US9323250B2 (en) | 2011-01-28 | 2016-04-26 | Intouch Technologies, Inc. | Time-dependent navigation of telepresence robots |
| US9320398B2 (en) | 2005-12-02 | 2016-04-26 | Irobot Corporation | Autonomous coverage robots |
| US9361021B2 (en) | 2012-05-22 | 2016-06-07 | Irobot Corporation | Graphical user interfaces including touchpad driving interfaces for telemedicine devices |
| US9381654B2 (en) | 2008-11-25 | 2016-07-05 | Intouch Technologies, Inc. | Server connectivity control for tele-presence robot |
| US9429934B2 (en) | 2008-09-18 | 2016-08-30 | Intouch Technologies, Inc. | Mobile videoconferencing robot system with network adaptive driving |
| US20170042625A1 (en)* | 2014-04-24 | 2017-02-16 | Covidien Lp | Robotic interface positioning determination systems and methods |
| US9602765B2 (en) | 2009-08-26 | 2017-03-21 | Intouch Technologies, Inc. | Portable remote presence robot |
| US9616576B2 (en) | 2008-04-17 | 2017-04-11 | Intouch Technologies, Inc. | Mobile tele-presence system with a microphone system |
| US9842192B2 (en) | 2008-07-11 | 2017-12-12 | Intouch Technologies, Inc. | Tele-presence robot system with multi-cast features |
| US9849593B2 (en) | 2002-07-25 | 2017-12-26 | Intouch Technologies, Inc. | Medical tele-robotic system with a master remote station with an arbitrator |
| US9974612B2 (en) | 2011-05-19 | 2018-05-22 | Intouch Technologies, Inc. | Enhanced diagnostics for a telepresence robot |
| CN109070363A (en)* | 2016-03-30 | 2018-12-21 | 索尼公司 | Mechanical arm control method and manipulator control device |
| US10265049B2 (en) | 2012-07-09 | 2019-04-23 | Arcscan, Inc. | Combination optical and ultrasonic imaging of an eye |
| US10343283B2 (en) | 2010-05-24 | 2019-07-09 | Intouch Technologies, Inc. | Telepresence robot system that can be accessed by a cellular phone |
| US10471588B2 (en) | 2008-04-14 | 2019-11-12 | Intouch Technologies, Inc. | Robotic based health care system |
| US10485509B2 (en)* | 2008-01-02 | 2019-11-26 | Arcscan, Inc. | Tracking system for an ultrasonic arc scanning apparatus |
| US10531859B2 (en) | 2008-01-02 | 2020-01-14 | Arcscan, Inc. | Components for a precision ultrasonic scanning apparatus for body parts |
| CN111012504A (en)* | 2019-12-23 | 2020-04-17 | 山东中科先进技术研究院有限公司 | A rope-driven joint decoupling mechanism |
| US10736605B2 (en) | 2014-02-24 | 2020-08-11 | Arcscan, Inc. | Disposable eyepiece system for an ultrasonic eye scanning apparatus |
| US10769739B2 (en) | 2011-04-25 | 2020-09-08 | Intouch Technologies, Inc. | Systems and methods for management of information among medical providers and facilities |
| US10808882B2 (en) | 2010-05-26 | 2020-10-20 | Intouch Technologies, Inc. | Tele-robotic system with a robot face placed on a chair |
| US10875182B2 (en) | 2008-03-20 | 2020-12-29 | Teladoc Health, Inc. | Remote presence system mounted to operating room hardware |
| US10888301B2 (en) | 2015-10-13 | 2021-01-12 | Arcscan, Inc. | Ultrasonic scanning apparatus |
| US20210252718A1 (en)* | 2020-02-19 | 2021-08-19 | Korea University Research And Business Foundation | Tool changing system of robot manipulator |
| US11154981B2 (en) | 2010-02-04 | 2021-10-26 | Teladoc Health, Inc. | Robot user interface for telepresence robot system |
| EP3903718A1 (en)* | 2020-04-28 | 2021-11-03 | Kawasaki Jukogyo Kabushiki Kaisha | Surgical robot |
| US11389064B2 (en) | 2018-04-27 | 2022-07-19 | Teladoc Health, Inc. | Telehealth cart that supports a removable tablet with seamless audio/video switching |
| US11399153B2 (en) | 2009-08-26 | 2022-07-26 | Teladoc Health, Inc. | Portable telepresence apparatus |
| US11426611B2 (en) | 2015-10-13 | 2022-08-30 | Arcscan, Inc. | Ultrasound therapeutic and scanning apparatus |
| CN115227390A (en)* | 2022-06-30 | 2022-10-25 | 中国科学院自动化研究所 | Robot main manipulator |
| US11636944B2 (en) | 2017-08-25 | 2023-04-25 | Teladoc Health, Inc. | Connectivity infrastructure for a telehealth platform |
| WO2023100126A1 (en)* | 2021-12-02 | 2023-06-08 | Forsight Robotics Ltd. | Force feedback for robotic microsurgical procedures |
| US11742094B2 (en) | 2017-07-25 | 2023-08-29 | Teladoc Health, Inc. | Modular telehealth cart with thermal imaging and touch screen user interface |
| US11844585B1 (en)* | 2023-02-10 | 2023-12-19 | Distalmotion Sa | Surgical robotics systems and devices having a sterile restart, and methods thereof |
| US11862302B2 (en) | 2017-04-24 | 2024-01-02 | Teladoc Health, Inc. | Automated transcription and documentation of tele-health encounters |
| US12093036B2 (en) | 2011-01-21 | 2024-09-17 | Teladoc Health, Inc. | Telerobotic system with a dual application screen presentation |
| US12224059B2 (en) | 2011-02-16 | 2025-02-11 | Teladoc Health, Inc. | Systems and methods for network-based counseling |
| US12415269B2 (en) | 2021-06-01 | 2025-09-16 | Forsight Robotics Ltd. | Kinematic structures for robotic microsurgical procedures |
Families Citing this family (179)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7297142B2 (en)* | 1998-02-24 | 2007-11-20 | Hansen Medical, Inc. | Interchangeable surgical instrument |
| US7775972B2 (en)* | 1998-02-24 | 2010-08-17 | Hansen Medical, Inc. | Flexible instrument |
| US7789875B2 (en)* | 1998-02-24 | 2010-09-07 | Hansen Medical, Inc. | Surgical instruments |
| US6860878B2 (en) | 1998-02-24 | 2005-03-01 | Endovia Medical Inc. | Interchangeable instrument |
| US7713190B2 (en) | 1998-02-24 | 2010-05-11 | Hansen Medical, Inc. | Flexible instrument |
| US8414598B2 (en) | 1998-02-24 | 2013-04-09 | Hansen Medical, Inc. | Flexible instrument |
| US6949106B2 (en) | 1998-02-24 | 2005-09-27 | Endovia Medical, Inc. | Surgical instrument |
| US8303576B2 (en)* | 1998-02-24 | 2012-11-06 | Hansen Medical, Inc. | Interchangeable surgical instrument |
| US20080177285A1 (en)* | 1998-02-24 | 2008-07-24 | Hansen Medical, Inc. | Surgical instrument |
| US20020095175A1 (en)* | 1998-02-24 | 2002-07-18 | Brock David L. | Flexible instrument |
| US7901399B2 (en)* | 1998-02-24 | 2011-03-08 | Hansen Medical, Inc. | Interchangeable surgical instrument |
| US7758569B2 (en) | 1998-02-24 | 2010-07-20 | Hansen Medical, Inc. | Interchangeable surgical instrument |
| KR100299210B1 (en)* | 1999-03-12 | 2001-09-22 | 박호군 | Master device having force reflective function |
| EP1224918A3 (en) | 1999-05-10 | 2002-12-18 | endoVia Medical Inc. | Surgical instrument |
| US6626899B2 (en) | 1999-06-25 | 2003-09-30 | Nidus Medical, Llc | Apparatus and methods for treating tissue |
| US6702805B1 (en)* | 1999-11-12 | 2004-03-09 | Microdexterity Systems, Inc. | Manipulator |
| US7635390B1 (en)* | 2000-01-14 | 2009-12-22 | Marctec, Llc | Joint replacement component having a modular articulating surface |
| JP4014792B2 (en)* | 2000-09-29 | 2007-11-28 | 株式会社東芝 | manipulator |
| US6442451B1 (en) | 2000-12-28 | 2002-08-27 | Robotic Workspace Technologies, Inc. | Versatile robot control system |
| US7892243B2 (en)* | 2001-01-16 | 2011-02-22 | Microdexterity Systems, Inc. | Surgical manipulator |
| US6676669B2 (en)* | 2001-01-16 | 2004-01-13 | Microdexterity Systems, Inc. | Surgical manipulator |
| US6928336B2 (en)* | 2001-02-12 | 2005-08-09 | The Stanley Works | System and architecture for providing a modular intelligent assist system |
| US6907317B2 (en)* | 2001-02-12 | 2005-06-14 | The Stanley Works | Hub for a modular intelligent assist system |
| US8414505B1 (en) | 2001-02-15 | 2013-04-09 | Hansen Medical, Inc. | Catheter driver system |
| US20090182226A1 (en)* | 2001-02-15 | 2009-07-16 | Barry Weitzner | Catheter tracking system |
| US20030135204A1 (en) | 2001-02-15 | 2003-07-17 | Endo Via Medical, Inc. | Robotically controlled medical instrument with a flexible section |
| US7699835B2 (en) | 2001-02-15 | 2010-04-20 | Hansen Medical, Inc. | Robotically controlled surgical instruments |
| US7766894B2 (en)* | 2001-02-15 | 2010-08-03 | Hansen Medical, Inc. | Coaxial catheter system |
| NO20013450L (en)* | 2001-07-11 | 2003-01-13 | Simsurgery As | Systems and methods for interactive training of procedures |
| JP4837844B2 (en)* | 2001-07-19 | 2011-12-14 | 富士通株式会社 | Simulation system, method, program, and recording medium |
| US7708741B1 (en) | 2001-08-28 | 2010-05-04 | Marctec, Llc | Method of preparing bones for knee replacement surgery |
| FR2829016B1 (en)* | 2001-09-03 | 2007-01-19 | Bertin Virgile Claude Nahum | SURGICAL DEVICE FOR GUIDING MILLING INSTRUMENTS, DRILLING, BORING OR CUTTING BONE TISSUES |
| US8010180B2 (en) | 2002-03-06 | 2011-08-30 | Mako Surgical Corp. | Haptic guidance system and method |
| US8996169B2 (en) | 2011-12-29 | 2015-03-31 | Mako Surgical Corp. | Neural monitor-based dynamic haptics |
| US11202676B2 (en) | 2002-03-06 | 2021-12-21 | Mako Surgical Corp. | Neural monitor-based dynamic haptics |
| US7831292B2 (en)* | 2002-03-06 | 2010-11-09 | Mako Surgical Corp. | Guidance system and method for surgical procedures with improved feedback |
| TW200304608A (en)* | 2002-03-06 | 2003-10-01 | Z Kat Inc | System and method for using a haptic device in combination with a computer-assisted surgery system |
| AU2003224710A1 (en)* | 2002-03-18 | 2003-10-08 | Carnegie Mellon University | Method and apparatus for preparing biomimetic scaffold |
| US8529956B2 (en)* | 2002-03-18 | 2013-09-10 | Carnell Therapeutics Corporation | Methods and apparatus for manufacturing plasma based plastics and bioplastics produced therefrom |
| US20100254900A1 (en)* | 2002-03-18 | 2010-10-07 | Campbell Phil G | Biocompatible polymers and Methods of use |
| US8293530B2 (en)* | 2006-10-17 | 2012-10-23 | Carnegie Mellon University | Method and apparatus for manufacturing plasma based plastics and bioplastics produced therefrom |
| US6925357B2 (en)* | 2002-07-25 | 2005-08-02 | Intouch Health, Inc. | Medical tele-robotic system |
| US7593030B2 (en) | 2002-07-25 | 2009-09-22 | Intouch Technologies, Inc. | Tele-robotic videoconferencing in a corporate environment |
| US20040176751A1 (en)* | 2002-08-14 | 2004-09-09 | Endovia Medical, Inc. | Robotic medical instrument system |
| US7331967B2 (en)* | 2002-09-09 | 2008-02-19 | Hansen Medical, Inc. | Surgical instrument coupling mechanism |
| KR100526741B1 (en)* | 2003-03-26 | 2005-11-08 | 김시학 | Tension Based Interface System for Force Feedback and/or Position Tracking and Surgically Operating System for Minimally Incising the affected Part Using the Same |
| WO2004103649A1 (en)* | 2003-05-20 | 2004-12-02 | Fujitsu Limited | Method for controlling backlash compensation, backlash compensation controller and program for controlling backlash compensation |
| US8007511B2 (en)* | 2003-06-06 | 2011-08-30 | Hansen Medical, Inc. | Surgical instrument design |
| JP2007523757A (en)* | 2003-06-20 | 2007-08-23 | ファナック ロボティクス アメリカ,インコーポレイティド | Tracking and mirroring of multiple robot arms |
| WO2005039835A1 (en)* | 2003-10-24 | 2005-05-06 | The University Of Western Ontario | Force reflective robotic control system and minimally invasive surgical device |
| US20050204438A1 (en)* | 2004-02-26 | 2005-09-15 | Yulun Wang | Graphical interface for a remote presence system |
| WO2005087128A1 (en) | 2004-03-05 | 2005-09-22 | Hansen Medical, Inc. | Robotic catheter system |
| US7976539B2 (en)* | 2004-03-05 | 2011-07-12 | Hansen Medical, Inc. | System and method for denaturing and fixing collagenous tissue |
| US7379790B2 (en)* | 2004-05-04 | 2008-05-27 | Intuitive Surgical, Inc. | Tool memory-based software upgrades for robotic surgery |
| FR2871363B1 (en)* | 2004-06-15 | 2006-09-01 | Medtech Sa | ROBOTIZED GUIDING DEVICE FOR SURGICAL TOOL |
| ITPI20040084A1 (en)* | 2004-11-18 | 2005-02-18 | Massimo Bergamasco | PORTABLE APTIC INTERFACE |
| JP2009500086A (en) | 2005-07-01 | 2009-01-08 | ハンセン メディカル,インク. | Robotic guide catheter system |
| US20070066917A1 (en)* | 2005-09-20 | 2007-03-22 | Hodorek Robert A | Method for simulating prosthetic implant selection and placement |
| AU2006306522B9 (en) | 2005-10-21 | 2011-12-08 | Deere & Company | Networked multi-role robotic vehicle |
| US20070156066A1 (en)* | 2006-01-03 | 2007-07-05 | Zimmer Technology, Inc. | Device for determining the shape of an anatomic surface |
| US7769492B2 (en)* | 2006-02-22 | 2010-08-03 | Intouch Technologies, Inc. | Graphical interface for a remote presence system |
| CA2644574C (en)* | 2006-03-17 | 2016-11-08 | Zimmer, Inc. | Methods of predetermining the contour of a resected bone surface and assessing the fit of a prosthesis on the bone |
| US8786613B2 (en) | 2006-04-08 | 2014-07-22 | Alan Millman | Method and system for interactive simulation of materials and models |
| WO2007117586A2 (en)* | 2006-04-08 | 2007-10-18 | Allan Millman | Method and system for interactive simulation of materials |
| US7854765B2 (en) | 2006-04-20 | 2010-12-21 | Moskowitz Mosheh T | Electronically controlled artificial intervertebral disc with motor assisted actuation systems |
| WO2007136769A2 (en) | 2006-05-19 | 2007-11-29 | Mako Surgical Corp. | Method and apparatus for controlling a haptic device |
| US20070291128A1 (en)* | 2006-06-15 | 2007-12-20 | Yulun Wang | Mobile teleconferencing system that projects an image provided by a mobile robot |
| US7391173B2 (en)* | 2006-06-30 | 2008-06-24 | Intuitive Surgical, Inc | Mechanically decoupled capstan drive |
| AU2007297702B2 (en)* | 2006-09-19 | 2013-04-04 | The Trustees Of Columbia University In The City Of New York | Systems, devices, and methods for surgery on a hollow anatomically suspended organ |
| US7843431B2 (en) | 2007-04-24 | 2010-11-30 | Irobot Corporation | Control system for a remote vehicle |
| US8529959B2 (en) | 2006-10-17 | 2013-09-10 | Carmell Therapeutics Corporation | Methods and apparatus for manufacturing plasma based plastics and bioplastics produced therefrom |
| US8054289B2 (en) | 2006-12-01 | 2011-11-08 | Mimic Technologies, Inc. | Methods, apparatus, and article for force feedback based on tension control and tracking through cables |
| US20080163118A1 (en)* | 2006-12-29 | 2008-07-03 | Jason Wolf | Representation of file relationships |
| US7950306B2 (en) | 2007-02-23 | 2011-05-31 | Microdexterity Systems, Inc. | Manipulator |
| US8265793B2 (en) | 2007-03-20 | 2012-09-11 | Irobot Corporation | Mobile robot for telecommunication |
| US20090024140A1 (en)* | 2007-07-20 | 2009-01-22 | Searete Llc, A Limited Liability Corporation Of The State Of Delaware | Surgical feedback system |
| US9179983B2 (en) | 2007-08-14 | 2015-11-10 | Zimmer, Inc. | Method of determining a contour of an anatomical structure and selecting an orthopaedic implant to replicate the anatomical structure |
| US8116910B2 (en)* | 2007-08-23 | 2012-02-14 | Intouch Technologies, Inc. | Telepresence robot with a printer |
| US20090157059A1 (en)* | 2007-12-14 | 2009-06-18 | Searete Llc, A Limited Liability Corporation Of The State Of Delaware | Surgical instrument navigation system |
| US20090209888A1 (en)* | 2008-02-18 | 2009-08-20 | Seyed Hessam Khatami | Spine Wheel |
| US8317744B2 (en) | 2008-03-27 | 2012-11-27 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter manipulator assembly |
| US8343096B2 (en) | 2008-03-27 | 2013-01-01 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter system |
| US20090248042A1 (en)* | 2008-03-27 | 2009-10-01 | Kirschenman Mark B | Model catheter input device |
| US8641663B2 (en) | 2008-03-27 | 2014-02-04 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter system input device |
| US9161817B2 (en) | 2008-03-27 | 2015-10-20 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter system |
| US9241768B2 (en) | 2008-03-27 | 2016-01-26 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Intelligent input device controller for a robotic catheter system |
| US8641664B2 (en) | 2008-03-27 | 2014-02-04 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter system with dynamic response |
| US8684962B2 (en) | 2008-03-27 | 2014-04-01 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Robotic catheter device cartridge |
| US8317453B2 (en)* | 2008-05-15 | 2012-11-27 | Ray Givens | Compound-arm manipulator |
| US10532466B2 (en)* | 2008-08-22 | 2020-01-14 | Titan Medical Inc. | Robotic hand controller |
| US8332072B1 (en) | 2008-08-22 | 2012-12-11 | Titan Medical Inc. | Robotic hand controller |
| US8237389B2 (en)* | 2008-11-12 | 2012-08-07 | Irobot Corporation | Multi mode safety control module |
| US8060250B2 (en)* | 2008-12-15 | 2011-11-15 | GM Global Technology Operations LLC | Joint-space impedance control for tendon-driven manipulators |
| US8594841B2 (en)* | 2008-12-31 | 2013-11-26 | Intuitive Surgical Operations, Inc. | Visual force feedback in a minimally invasive surgical procedure |
| US8374723B2 (en)* | 2008-12-31 | 2013-02-12 | Intuitive Surgical Operations, Inc. | Obtaining force information in a minimally invasive surgical procedure |
| US8120301B2 (en)* | 2009-03-09 | 2012-02-21 | Intuitive Surgical Operations, Inc. | Ergonomic surgeon control console in robotic surgical systems |
| US9254123B2 (en) | 2009-04-29 | 2016-02-09 | Hansen Medical, Inc. | Flexible and steerable elongate instruments with shape control and support elements |
| US20100275718A1 (en)* | 2009-04-29 | 2010-11-04 | Microdexterity Systems, Inc. | Manipulator |
| IT1395018B1 (en)* | 2009-07-22 | 2012-09-05 | Surgica Robotica S R L | EQUIPMENT FOR MINIMUM INVASIVE SURGICAL PROCEDURES |
| US9439736B2 (en) | 2009-07-22 | 2016-09-13 | St. Jude Medical, Atrial Fibrillation Division, Inc. | System and method for controlling a remote medical device guidance system in three-dimensions using gestures |
| US9330497B2 (en) | 2011-08-12 | 2016-05-03 | St. Jude Medical, Atrial Fibrillation Division, Inc. | User interface devices for electrophysiology lab diagnostic and therapeutic equipment |
| DE102009038721A1 (en)* | 2009-08-25 | 2011-03-03 | Kuka Roboter Gmbh | Arrangement and method for the secure control of a manipulator |
| US8483879B2 (en)* | 2009-11-30 | 2013-07-09 | GM Global Technology Operations LLC | Human-robot interactive system having a human stiffness estimation control algorithm |
| IT1398238B1 (en) | 2010-02-25 | 2013-02-22 | Surgica Robotica S P A | INSTRUMENT FOR ROBOTIC SURGERY |
| US9888973B2 (en) | 2010-03-31 | 2018-02-13 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Intuitive user interface control for remote catheter navigation and 3D mapping and visualization systems |
| US8235437B2 (en) | 2010-04-07 | 2012-08-07 | Delaware Capital Formation, Inc. | Electric gripper drive with a torsional compliance device |
| US8935005B2 (en) | 2010-05-20 | 2015-01-13 | Irobot Corporation | Operating a mobile robot |
| US9014848B2 (en) | 2010-05-20 | 2015-04-21 | Irobot Corporation | Mobile robot system |
| US8918213B2 (en) | 2010-05-20 | 2014-12-23 | Irobot Corporation | Mobile human interface robot |
| WO2012020386A1 (en) | 2010-08-11 | 2012-02-16 | Ecole Polytechnique Federale De Lausanne (Epfl) | Mechanical positioning system for surgical instruments |
| WO2012047626A1 (en) | 2010-09-27 | 2012-04-12 | University Of Pittsburgh - Of The Commonwealth System Of Higher Education | Portable haptic force magnifier |
| US12402960B2 (en) | 2010-10-11 | 2025-09-02 | Ecole Polytechnique Federale De Lausanne (Epfl) | Mechanical manipulator for surgical instruments |
| EP2627278B1 (en) | 2010-10-11 | 2015-03-25 | Ecole Polytechnique Fédérale de Lausanne (EPFL) | Mechanical manipulator for surgical instruments |
| WO2013014621A2 (en) | 2011-07-27 | 2013-01-31 | Ecole Polytechnique Federale De Lausanne (Epfl) | Mechanical teleoperated device for remote manipulation |
| KR20120058826A (en)* | 2010-11-30 | 2012-06-08 | 삼성전자주식회사 | Method of controlling medical equipment |
| WO2012074564A1 (en) | 2010-12-02 | 2012-06-07 | Freehand Endoscopic Devices, Inc. | Surgical tool |
| US8736212B2 (en)* | 2010-12-16 | 2014-05-27 | St. Jude Medical, Atrial Fibrillation Division, Inc. | System and method of automatic detection and prevention of motor runaway |
| US9921712B2 (en) | 2010-12-29 | 2018-03-20 | Mako Surgical Corp. | System and method for providing substantially stable control of a surgical tool |
| US9119655B2 (en) | 2012-08-03 | 2015-09-01 | Stryker Corporation | Surgical manipulator capable of controlling a surgical instrument in multiple modes |
| US8930019B2 (en) | 2010-12-30 | 2015-01-06 | Irobot Corporation | Mobile human interface robot |
| US20120191079A1 (en) | 2011-01-20 | 2012-07-26 | Hansen Medical, Inc. | System and method for endoluminal and translumenal therapy |
| US9789603B2 (en) | 2011-04-29 | 2017-10-17 | Sarcos Lc | Teleoperated robotic system |
| US20130030363A1 (en) | 2011-07-29 | 2013-01-31 | Hansen Medical, Inc. | Systems and methods utilizing shape sensing fibers |
| US9820818B2 (en) | 2012-08-03 | 2017-11-21 | Stryker Corporation | System and method for controlling a surgical manipulator based on implant parameters |
| CN107198567B (en) | 2012-08-03 | 2021-02-09 | 史赛克公司 | Systems and methods for robotic surgery |
| US9226796B2 (en) | 2012-08-03 | 2016-01-05 | Stryker Corporation | Method for detecting a disturbance as an energy applicator of a surgical instrument traverses a cutting path |
| US20140148673A1 (en) | 2012-11-28 | 2014-05-29 | Hansen Medical, Inc. | Method of anchoring pullwire directly articulatable region in catheter |
| EP2996615B1 (en) | 2013-03-13 | 2019-01-30 | Stryker Corporation | System for arranging objects in an operating room in preparation for surgical procedures |
| KR102060390B1 (en) | 2013-03-13 | 2019-12-30 | 스트리커 코포레이션 | System for establishing virtual constraint boundaries |
| US20140277334A1 (en) | 2013-03-14 | 2014-09-18 | Hansen Medical, Inc. | Active drives for robotic catheter manipulators |
| US9326822B2 (en) | 2013-03-14 | 2016-05-03 | Hansen Medical, Inc. | Active drives for robotic catheter manipulators |
| US9408669B2 (en) | 2013-03-15 | 2016-08-09 | Hansen Medical, Inc. | Active drive mechanism with finite range of motion |
| US20140276936A1 (en) | 2013-03-15 | 2014-09-18 | Hansen Medical, Inc. | Active drive mechanism for simultaneous rotation and translation |
| KR102115447B1 (en)* | 2013-03-27 | 2020-05-27 | 한양대학교 에리카산학협력단 | Endoscope apparatus |
| KR20140129702A (en)* | 2013-04-30 | 2014-11-07 | 삼성전자주식회사 | Surgical robot system and method for controlling the same |
| JP6164964B2 (en)* | 2013-07-26 | 2017-07-19 | オリンパス株式会社 | Medical system and control method thereof |
| WO2015021333A1 (en)* | 2013-08-07 | 2015-02-12 | Cornell Universty | Semiconductor tweezers and instrumentation for tissue detection and characterization |
| CN103753534B (en)* | 2013-12-13 | 2016-05-04 | 国家电网公司 | A kind of Movement Controller of Mobile Robot and control method thereof |
| CN106659540B (en) | 2014-02-03 | 2019-03-05 | 迪斯塔莫申股份公司 | Mechanical teleoperated devices including interchangeable distal instruments |
| US10046140B2 (en) | 2014-04-21 | 2018-08-14 | Hansen Medical, Inc. | Devices, systems, and methods for controlling active drive systems |
| EP3185808B1 (en) | 2014-08-27 | 2022-02-23 | DistalMotion SA | Surgical system for microsurgical techniques |
| US10820939B2 (en) | 2014-09-15 | 2020-11-03 | Covidien Lp | Vessel-sealing device including force-balance interface and electrosurgical system including same |
| WO2016097871A1 (en) | 2014-12-19 | 2016-06-23 | Distalmotion Sa | Docking system for mechanical telemanipulator |
| WO2016097861A1 (en) | 2014-12-19 | 2016-06-23 | Distalmotion Sa | Sterile interface for articulated surgical instruments |
| WO2016097873A2 (en) | 2014-12-19 | 2016-06-23 | Distalmotion Sa | Articulated handle for mechanical telemanipulator |
| EP3653145B1 (en) | 2014-12-19 | 2024-01-24 | DistalMotion SA | Reusable surgical instrument for minimally invasive procedures |
| EP3232951B1 (en) | 2014-12-19 | 2023-10-25 | DistalMotion SA | Surgical instrument with articulated end-effector |
| US10514687B2 (en) | 2015-01-08 | 2019-12-24 | Rethink Robotics Gmbh | Hybrid training with collaborative and conventional robots |
| US20160206179A1 (en)* | 2015-01-15 | 2016-07-21 | National Taiwan University | Assistive robot endoscopic system with intuitive maneuverability for laparoscopic surgery and method thereof |
| GB2534558B (en)* | 2015-01-21 | 2020-12-30 | Cmr Surgical Ltd | Robot tool retraction |
| US10568709B2 (en) | 2015-04-09 | 2020-02-25 | Distalmotion Sa | Mechanical teleoperated device for remote manipulation |
| EP3280337B1 (en) | 2015-04-09 | 2019-11-13 | DistalMotion SA | Articulated hand-held instrument |
| EP3741309A1 (en) | 2015-04-22 | 2020-11-25 | Covidien LP | Handheld electromechanical surgical system |
| US11278286B2 (en) | 2015-04-22 | 2022-03-22 | Covidien Lp | Handheld electromechanical surgical system |
| WO2017037532A1 (en) | 2015-08-28 | 2017-03-09 | Distalmotion Sa | Surgical instrument with increased actuation force |
| US12390287B2 (en) | 2015-10-16 | 2025-08-19 | Medical Microinstruments, Inc. | Surgical tool for robotic surgery and robotic surgical assembly |
| ITUB20154977A1 (en) | 2015-10-16 | 2017-04-16 | Medical Microinstruments S R L | Medical instrument and method of manufacture of said medical instrument |
| ITUB20155057A1 (en) | 2015-10-16 | 2017-04-16 | Medical Microinstruments S R L | Robotic surgery set |
| CN105234942B (en)* | 2015-11-02 | 2018-08-10 | 国网山东省电力公司电力科学研究院 | The control system and its control method of the big prudent small arm of hydraulic pressure |
| US10562191B2 (en) | 2015-12-29 | 2020-02-18 | Robomotive Laboratories LLC | Method of controlling devices with sensation of applied force |
| CN108472096B (en) | 2015-12-31 | 2021-11-16 | 史赛克公司 | System and method for performing a procedure on a patient at a target site defined by a virtual object |
| US10463439B2 (en) | 2016-08-26 | 2019-11-05 | Auris Health, Inc. | Steerable catheter with shaft load distributions |
| US11241559B2 (en) | 2016-08-29 | 2022-02-08 | Auris Health, Inc. | Active drive for guidewire manipulation |
| US11202682B2 (en) | 2016-12-16 | 2021-12-21 | Mako Surgical Corp. | Techniques for modifying tool operation in a surgical robotic system based on comparing actual and commanded states of the tool relative to a surgical site |
| IT201700041980A1 (en) | 2017-04-14 | 2018-10-14 | Medical Microinstruments Spa | ROBOTIC ASSEMBLY FOR MICROSURGERY |
| IT201700042116A1 (en) | 2017-04-14 | 2018-10-14 | Medical Microinstruments Spa | ROBOTIC ASSEMBLY FOR SURGERY |
| US11058503B2 (en) | 2017-05-11 | 2021-07-13 | Distalmotion Sa | Translational instrument interface for surgical robot and surgical robot systems comprising the same |
| CN111386085B (en) | 2017-10-02 | 2023-12-26 | 直观外科手术操作公司 | End effector force feedback to master controller |
| US12376927B2 (en) | 2018-02-07 | 2025-08-05 | Distalmotion Sa | Surgical robot systems comprising robotic telemanipulators and integrated laparoscopy |
| AU2019218707B2 (en) | 2018-02-07 | 2024-10-24 | Distalmotion Sa | Surgical robot systems comprising robotic telemanipulators and integrated laparoscopy |
| US11137773B2 (en)* | 2018-05-04 | 2021-10-05 | Lg Electronics Inc. | Plurality of autonomous mobile robots and controlling method for the same |
| CN119770189A (en)* | 2018-10-04 | 2025-04-08 | 直观外科手术操作公司 | System and method for motion control of a steerable device |
| CN109528308B (en)* | 2018-12-22 | 2020-12-25 | 上海交通大学 | Main end intervention force in-situ sensing variable damping control system |
| WO2021003401A1 (en) | 2019-07-03 | 2021-01-07 | Stryker Corporation | Obstacle avoidance techniques for surgical navigation |
| CN112077853B (en)* | 2020-11-16 | 2021-03-02 | 杭州景业智能科技股份有限公司 | Force feedback method and device for master-slave follow-up system and master-slave follow-up system |
| EP4267033A1 (en) | 2020-12-22 | 2023-11-01 | Medical Microinstruments, Inc. | Surgical tool for robotic surgery and robotic surgical assembly |
| US11794345B2 (en) | 2020-12-31 | 2023-10-24 | Sarcos Corp. | Unified robotic vehicle systems and methods of control |
| WO2023037273A1 (en) | 2021-09-13 | 2023-03-16 | Distalmotion Sa | Instruments for surgical robotic system and interfaces for the same |
| EP4265216A1 (en)* | 2022-04-21 | 2023-10-25 | Microsure B.V. | Robot arm for use in surgery, microsurgery or super-microsurgery |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3923166A (en)* | 1973-10-11 | 1975-12-02 | Nasa | Remote manipulator system |
| DE2918331C3 (en)* | 1979-05-07 | 1982-02-25 | Glas - und Spiegel-Manufactur AG, 4650 Gelsenkirchen | Device for breaking glass plates along straight cutting lines running across the glass plates |
| US4905001A (en)* | 1987-10-08 | 1990-02-27 | Penner Henry C | Hand-held finger movement actuated communication devices and systems employing such devices |
| US5184319A (en)* | 1990-02-02 | 1993-02-02 | Kramer James F | Force feedback and textures simulating interface device |
| GB9108497D0 (en)* | 1991-04-20 | 1991-06-05 | Ind Limited W | Human/computer interface |
| US5397323A (en)* | 1992-10-30 | 1995-03-14 | International Business Machines Corporation | Remote center-of-motion robot for surgery |
| US5731804A (en)* | 1995-01-18 | 1998-03-24 | Immersion Human Interface Corp. | Method and apparatus for providing high bandwidth, low noise mechanical I/O for computer systems |
| US6057828A (en)* | 1993-07-16 | 2000-05-02 | Immersion Corporation | Method and apparatus for providing force sensations in virtual environments in accordance with host software |
| US5625576A (en)* | 1993-10-01 | 1997-04-29 | Massachusetts Institute Of Technology | Force reflecting haptic interface |
| WO1995020787A1 (en)* | 1994-01-27 | 1995-08-03 | Exos, Inc. | Multimode feedback display technology |
| US5784542A (en) | 1995-09-07 | 1998-07-21 | California Institute Of Technology | Decoupled six degree-of-freedom teleoperated robot system |
| US5710870A (en) | 1995-09-07 | 1998-01-20 | California Institute Of Technology | Decoupled six degree-of-freedom robot manipulator |
| US6692485B1 (en)* | 1998-02-24 | 2004-02-17 | Endovia Medical, Inc. | Articulated apparatus for telemanipulator system |
| US6184868B1 (en)* | 1998-09-17 | 2001-02-06 | Immersion Corp. | Haptic feedback control devices |
| AU1251101A (en)* | 1999-09-09 | 2001-04-10 | Rutgers, The State Of University Of New Jersey | Remote mechanical mirroring using controlled stiffness and actuators (memica) |
- 1999
- 1999-04-14USUS09/292,761patent/US6233504B1/ennot_activeExpired - Lifetime
- 2001
- 2001-05-15USUS09/858,673patent/US6385509B2/ennot_activeExpired - Lifetime
Cited By (249)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20090065271A1 (en)* | 1998-03-27 | 2009-03-12 | Irobot Corporation | Robotic Platform |
| US8763732B2 (en) | 1998-03-27 | 2014-07-01 | Irobot Corporation | Robotic platform |
| US9248874B2 (en) | 1998-03-27 | 2016-02-02 | Irobot Corporation | Robotic platform |
| US9573638B2 (en) | 1998-03-27 | 2017-02-21 | Irobot Defense Holdings, Inc. | Robotic platform |
| US8365848B2 (en) | 1998-03-27 | 2013-02-05 | Irobot Corporation | Robotic platform |
| US8113304B2 (en) | 1998-03-27 | 2012-02-14 | Irobot Corporation | Robotic platform |
| US7597162B2 (en) | 1998-03-27 | 2009-10-06 | Irobot Corporation | Robotic platform |
| US7556108B2 (en) | 1998-03-27 | 2009-07-07 | Irobot Corporation | Robotic platform |
| US7546891B2 (en) | 1998-03-27 | 2009-06-16 | Irobot Corporation | Robotic platform |
| US20050027397A1 (en)* | 1999-04-07 | 2005-02-03 | Intuitive Surgical, Inc. | Aspects of a control system of a minimally invasive surgical apparatus |
| US9446521B2 (en) | 2000-01-24 | 2016-09-20 | Irobot Corporation | Obstacle following sensor scheme for a mobile robot |
| US8565920B2 (en) | 2000-01-24 | 2013-10-22 | Irobot Corporation | Obstacle following sensor scheme for a mobile robot |
| US8412377B2 (en) | 2000-01-24 | 2013-04-02 | Irobot Corporation | Obstacle following sensor scheme for a mobile robot |
| US8478442B2 (en) | 2000-01-24 | 2013-07-02 | Irobot Corporation | Obstacle following sensor scheme for a mobile robot |
| US8761935B2 (en) | 2000-01-24 | 2014-06-24 | Irobot Corporation | Obstacle following sensor scheme for a mobile robot |
| US8788092B2 (en) | 2000-01-24 | 2014-07-22 | Irobot Corporation | Obstacle following sensor scheme for a mobile robot |
| US9144361B2 (en) | 2000-04-04 | 2015-09-29 | Irobot Corporation | Debris sensor for cleaning apparatus |
| US20030216834A1 (en)* | 2000-05-01 | 2003-11-20 | Allard James R. | Method and system for remote control of mobile robot |
| US6535793B2 (en)* | 2000-05-01 | 2003-03-18 | Irobot Corporation | Method and system for remote control of mobile robot |
| US6845297B2 (en) | 2000-05-01 | 2005-01-18 | Irobot Corporation | Method and system for remote control of mobile robot |
| US8368339B2 (en) | 2001-01-24 | 2013-02-05 | Irobot Corporation | Robot confinement |
| US8659256B2 (en) | 2001-01-24 | 2014-02-25 | Irobot Corporation | Robot confinement |
| US9167946B2 (en) | 2001-01-24 | 2015-10-27 | Irobot Corporation | Autonomous floor cleaning robot |
| US9038233B2 (en) | 2001-01-24 | 2015-05-26 | Irobot Corporation | Autonomous floor-cleaning robot |
| US9622635B2 (en) | 2001-01-24 | 2017-04-18 | Irobot Corporation | Autonomous floor-cleaning robot |
| US8659255B2 (en) | 2001-01-24 | 2014-02-25 | Irobot Corporation | Robot confinement |
| US8686679B2 (en) | 2001-01-24 | 2014-04-01 | Irobot Corporation | Robot confinement |
| US9582005B2 (en) | 2001-01-24 | 2017-02-28 | Irobot Corporation | Robot confinement |
| US6738691B1 (en)* | 2001-05-17 | 2004-05-18 | The Stanley Works | Control handle for intelligent assist devices |
| US9104204B2 (en) | 2001-06-12 | 2015-08-11 | Irobot Corporation | Method and system for multi-mode coverage for an autonomous robot |
| US8396592B2 (en) | 2001-06-12 | 2013-03-12 | Irobot Corporation | Method and system for multi-mode coverage for an autonomous robot |
| US8463438B2 (en) | 2001-06-12 | 2013-06-11 | Irobot Corporation | Method and system for multi-mode coverage for an autonomous robot |
| US8939891B2 (en) | 2001-12-08 | 2015-01-27 | Intuitive Surgical Operations, Inc. | Multifunctional handle for a medical robotic system |
| US8002767B2 (en)* | 2001-12-08 | 2011-08-23 | Intuitive Surgical Operations, Inc. | Multifunctional handle for a medical robotic system |
| US8474090B2 (en) | 2002-01-03 | 2013-07-02 | Irobot Corporation | Autonomous floor-cleaning robot |
| US8516651B2 (en) | 2002-01-03 | 2013-08-27 | Irobot Corporation | Autonomous floor-cleaning robot |
| US9128486B2 (en) | 2002-01-24 | 2015-09-08 | Irobot Corporation | Navigational control system for a robotic device |
| ES2200679A1 (en)* | 2002-03-25 | 2004-03-01 | Univ Malaga | SYSTEM OF TELEOPERATION OF ROBOTS FOR TRANSURETRAL RESECTION OF THE PROSTATE. |
| US20050209734A1 (en)* | 2002-04-17 | 2005-09-22 | Michiharu Tanaka | Robot system and controller |
| US20120072024A1 (en)* | 2002-07-25 | 2012-03-22 | Yulun Wang | Telerobotic system with dual application screen presentation |
| US10315312B2 (en) | 2002-07-25 | 2019-06-11 | Intouch Technologies, Inc. | Medical tele-robotic system with a master remote station with an arbitrator |
| US9849593B2 (en) | 2002-07-25 | 2017-12-26 | Intouch Technologies, Inc. | Medical tele-robotic system with a master remote station with an arbitrator |
| US8005571B2 (en) | 2002-08-13 | 2011-08-23 | Neuroarm Surgical Ltd. | Microsurgical robot system |
| US8041459B2 (en)* | 2002-08-13 | 2011-10-18 | Neuroarm Surgical Ltd. | Methods relating to microsurgical robot system |
| US8170717B2 (en)* | 2002-08-13 | 2012-05-01 | Neuroarm Surgical Ltd. | Microsurgical robot system |
| US8781626B2 (en) | 2002-09-13 | 2014-07-15 | Irobot Corporation | Navigational control system for a robotic device |
| US8793020B2 (en) | 2002-09-13 | 2014-07-29 | Irobot Corporation | Navigational control system for a robotic device |
| US9949608B2 (en) | 2002-09-13 | 2018-04-24 | Irobot Corporation | Navigational control system for a robotic device |
| US8386081B2 (en) | 2002-09-13 | 2013-02-26 | Irobot Corporation | Navigational control system for a robotic device |
| US8515578B2 (en) | 2002-09-13 | 2013-08-20 | Irobot Corporation | Navigational control system for a robotic device |
| US8428778B2 (en) | 2002-09-13 | 2013-04-23 | Irobot Corporation | Navigational control system for a robotic device |
| US8994643B2 (en) | 2003-10-30 | 2015-03-31 | 3D Systems, Inc. | Force reflecting haptic interface |
| CN100444085C (en)* | 2003-10-30 | 2008-12-17 | 森瑟博科技有限公司 | Force Feedback Haptic Interface |
| US7411576B2 (en) | 2003-10-30 | 2008-08-12 | Sensable Technologies, Inc. | Force reflecting haptic interface |
| WO2005043365A3 (en)* | 2003-10-30 | 2005-09-29 | Sensable Technologies Inc | Force reflecting haptic interface |
| US9296107B2 (en) | 2003-12-09 | 2016-03-29 | Intouch Technologies, Inc. | Protocol for a remotely controlled videoconferencing robot |
| US9375843B2 (en) | 2003-12-09 | 2016-06-28 | Intouch Technologies, Inc. | Protocol for a remotely controlled videoconferencing robot |
| US9956690B2 (en) | 2003-12-09 | 2018-05-01 | Intouch Technologies, Inc. | Protocol for a remotely controlled videoconferencing robot |
| US10882190B2 (en) | 2003-12-09 | 2021-01-05 | Teladoc Health, Inc. | Protocol for a remotely controlled videoconferencing robot |
| US8854001B2 (en) | 2004-01-21 | 2014-10-07 | Irobot Corporation | Autonomous robot auto-docking and energy management systems and methods |
| US9215957B2 (en) | 2004-01-21 | 2015-12-22 | Irobot Corporation | Autonomous robot auto-docking and energy management systems and methods |
| US8461803B2 (en) | 2004-01-21 | 2013-06-11 | Irobot Corporation | Autonomous robot auto-docking and energy management systems and methods |
| US8390251B2 (en) | 2004-01-21 | 2013-03-05 | Irobot Corporation | Autonomous robot auto-docking and energy management systems and methods |
| US8749196B2 (en) | 2004-01-21 | 2014-06-10 | Irobot Corporation | Autonomous robot auto-docking and energy management systems and methods |
| US8598829B2 (en) | 2004-01-28 | 2013-12-03 | Irobot Corporation | Debris sensor for cleaning apparatus |
| US8253368B2 (en) | 2004-01-28 | 2012-08-28 | Irobot Corporation | Debris sensor for cleaning apparatus |
| US8378613B2 (en) | 2004-01-28 | 2013-02-19 | Irobot Corporation | Debris sensor for cleaning apparatus |
| US8456125B2 (en) | 2004-01-28 | 2013-06-04 | Irobot Corporation | Debris sensor for cleaning apparatus |
| US8780342B2 (en) | 2004-03-29 | 2014-07-15 | Irobot Corporation | Methods and apparatus for position estimation using reflected light sources |
| US9360300B2 (en) | 2004-03-29 | 2016-06-07 | Irobot Corporation | Methods and apparatus for position estimation using reflected light sources |
| US9008835B2 (en) | 2004-06-24 | 2015-04-14 | Irobot Corporation | Remote control scheduler and method for autonomous robotic device |
| US9486924B2 (en) | 2004-06-24 | 2016-11-08 | Irobot Corporation | Remote control scheduler and method for autonomous robotic device |
| US8874264B1 (en) | 2004-07-07 | 2014-10-28 | Irobot Corporation | Celestial navigation system for an autonomous robot |
| US9229454B1 (en) | 2004-07-07 | 2016-01-05 | Irobot Corporation | Autonomous mobile robot system |
| US9223749B2 (en) | 2004-07-07 | 2015-12-29 | Irobot Corporation | Celestial navigation system for an autonomous vehicle |
| US8634956B1 (en) | 2004-07-07 | 2014-01-21 | Irobot Corporation | Celestial navigation system for an autonomous robot |
| US8972052B2 (en) | 2004-07-07 | 2015-03-03 | Irobot Corporation | Celestial navigation system for an autonomous vehicle |
| US8594840B1 (en) | 2004-07-07 | 2013-11-26 | Irobot Corporation | Celestial navigation system for an autonomous robot |
| US10241507B2 (en) | 2004-07-13 | 2019-03-26 | Intouch Technologies, Inc. | Mobile robot with a head-based movement mapping scheme |
| US8983174B2 (en) | 2004-07-13 | 2015-03-17 | Intouch Technologies, Inc. | Mobile robot with a head-based movement mapping scheme |
| US9766624B2 (en) | 2004-07-13 | 2017-09-19 | Intouch Technologies, Inc. | Mobile robot with a head-based movement mapping scheme |
| US20080147206A1 (en)* | 2004-08-30 | 2008-06-19 | Abb Ab | Control system for Real Time Applications for Cooperative Industrial Robots |
| US8000837B2 (en) | 2004-10-05 | 2011-08-16 | J&L Group International, Llc | Programmable load forming system, components thereof, and methods of use |
| US10470629B2 (en) | 2005-02-18 | 2019-11-12 | Irobot Corporation | Autonomous surface cleaning robot for dry cleaning |
| US8966707B2 (en) | 2005-02-18 | 2015-03-03 | Irobot Corporation | Autonomous surface cleaning robot for dry cleaning |
| US8782848B2 (en) | 2005-02-18 | 2014-07-22 | Irobot Corporation | Autonomous surface cleaning robot for dry cleaning |
| US8739355B2 (en) | 2005-02-18 | 2014-06-03 | Irobot Corporation | Autonomous surface cleaning robot for dry cleaning |
| US8670866B2 (en) | 2005-02-18 | 2014-03-11 | Irobot Corporation | Autonomous surface cleaning robot for wet and dry cleaning |
| US8985127B2 (en) | 2005-02-18 | 2015-03-24 | Irobot Corporation | Autonomous surface cleaning robot for wet cleaning |
| US8774966B2 (en) | 2005-02-18 | 2014-07-08 | Irobot Corporation | Autonomous surface cleaning robot for wet and dry cleaning |
| US9445702B2 (en) | 2005-02-18 | 2016-09-20 | Irobot Corporation | Autonomous surface cleaning robot for wet and dry cleaning |
| US8382906B2 (en) | 2005-02-18 | 2013-02-26 | Irobot Corporation | Autonomous surface cleaning robot for wet cleaning |
| US8387193B2 (en) | 2005-02-18 | 2013-03-05 | Irobot Corporation | Autonomous surface cleaning robot for wet and dry cleaning |
| US8392021B2 (en) | 2005-02-18 | 2013-03-05 | Irobot Corporation | Autonomous surface cleaning robot for wet cleaning |
| US8855813B2 (en) | 2005-02-18 | 2014-10-07 | Irobot Corporation | Autonomous surface cleaning robot for wet and dry cleaning |
| US7391177B2 (en)* | 2005-05-20 | 2008-06-24 | Hitachi, Ltd. | Master-slave manipulator system and this operation input devices |
| US20060261770A1 (en)* | 2005-05-20 | 2006-11-23 | Kosuke Kishi | Master-slave manipulator system and this operation input devcies |
| US9198728B2 (en) | 2005-09-30 | 2015-12-01 | Intouch Technologies, Inc. | Multi-camera mobile teleconferencing platform |
| US10259119B2 (en) | 2005-09-30 | 2019-04-16 | Intouch Technologies, Inc. | Multi-camera mobile teleconferencing platform |
| US8600553B2 (en) | 2005-12-02 | 2013-12-03 | Irobot Corporation | Coverage robot mobility |
| US8978196B2 (en) | 2005-12-02 | 2015-03-17 | Irobot Corporation | Coverage robot mobility |
| US9144360B2 (en) | 2005-12-02 | 2015-09-29 | Irobot Corporation | Autonomous coverage robot navigation system |
| US8950038B2 (en) | 2005-12-02 | 2015-02-10 | Irobot Corporation | Modular robot |
| US8954192B2 (en) | 2005-12-02 | 2015-02-10 | Irobot Corporation | Navigating autonomous coverage robots |
| US8661605B2 (en) | 2005-12-02 | 2014-03-04 | Irobot Corporation | Coverage robot mobility |
| US10524629B2 (en) | 2005-12-02 | 2020-01-07 | Irobot Corporation | Modular Robot |
| US9320398B2 (en) | 2005-12-02 | 2016-04-26 | Irobot Corporation | Autonomous coverage robots |
| US8761931B2 (en) | 2005-12-02 | 2014-06-24 | Irobot Corporation | Robot system |
| US9149170B2 (en) | 2005-12-02 | 2015-10-06 | Irobot Corporation | Navigating autonomous coverage robots |
| US8606401B2 (en) | 2005-12-02 | 2013-12-10 | Irobot Corporation | Autonomous coverage robot navigation system |
| US8380350B2 (en) | 2005-12-02 | 2013-02-19 | Irobot Corporation | Autonomous coverage robot navigation system |
| US8374721B2 (en) | 2005-12-02 | 2013-02-12 | Irobot Corporation | Robot system |
| US9599990B2 (en) | 2005-12-02 | 2017-03-21 | Irobot Corporation | Robot system |
| US7441298B2 (en) | 2005-12-02 | 2008-10-28 | Irobot Corporation | Coverage robot mobility |
| US9392920B2 (en) | 2005-12-02 | 2016-07-19 | Irobot Corporation | Robot system |
| US8584305B2 (en) | 2005-12-02 | 2013-11-19 | Irobot Corporation | Modular robot |
| US9791860B2 (en) | 2006-05-12 | 2017-10-17 | Irobot Defense Holdings Inc. | Autonomous behaviors for a remote vehicle |
| US8418303B2 (en) | 2006-05-19 | 2013-04-16 | Irobot Corporation | Cleaning robot roller processing |
| US8528157B2 (en) | 2006-05-19 | 2013-09-10 | Irobot Corporation | Coverage robots and associated cleaning bins |
| US8572799B2 (en) | 2006-05-19 | 2013-11-05 | Irobot Corporation | Removing debris from cleaning robots |
| US9492048B2 (en) | 2006-05-19 | 2016-11-15 | Irobot Corporation | Removing debris from cleaning robots |
| US9955841B2 (en) | 2006-05-19 | 2018-05-01 | Irobot Corporation | Removing debris from cleaning robots |
| US10244915B2 (en) | 2006-05-19 | 2019-04-02 | Irobot Corporation | Coverage robots and associated cleaning bins |
| US8417383B2 (en) | 2006-05-31 | 2013-04-09 | Irobot Corporation | Detecting robot stasis |
| US9317038B2 (en) | 2006-05-31 | 2016-04-19 | Irobot Corporation | Detecting robot stasis |
| US8849679B2 (en) | 2006-06-15 | 2014-09-30 | Intouch Technologies, Inc. | Remote controlled robot system that provides medical images |
| US8326469B2 (en) | 2006-07-14 | 2012-12-04 | Irobot Corporation | Autonomous behaviors for a remote vehicle |
| US20080027590A1 (en)* | 2006-07-14 | 2008-01-31 | Emilie Phillips | Autonomous behaviors for a remote vehicle |
| US8396611B2 (en) | 2006-07-14 | 2013-03-12 | Irobot Corporation | Autonomous behaviors for a remote vehicle |
| US8843244B2 (en) | 2006-10-06 | 2014-09-23 | Irobot Corporation | Autonomous behaviors for a remove vehicle |
| US20080086241A1 (en)* | 2006-10-06 | 2008-04-10 | Irobot Corporation | Autonomous Behaviors for a Remove Vehicle |
| US9160783B2 (en) | 2007-05-09 | 2015-10-13 | Intouch Technologies, Inc. | Robot system that operates through a network firewall |
| US10682763B2 (en) | 2007-05-09 | 2020-06-16 | Intouch Technologies, Inc. | Robot system that operates through a network firewall |
| US8726454B2 (en) | 2007-05-09 | 2014-05-20 | Irobot Corporation | Autonomous coverage robot |
| US11072250B2 (en) | 2007-05-09 | 2021-07-27 | Irobot Corporation | Autonomous coverage robot sensing |
| US8239992B2 (en) | 2007-05-09 | 2012-08-14 | Irobot Corporation | Compact autonomous coverage robot |
| US9480381B2 (en) | 2007-05-09 | 2016-11-01 | Irobot Corporation | Compact autonomous coverage robot |
| US10070764B2 (en) | 2007-05-09 | 2018-09-11 | Irobot Corporation | Compact autonomous coverage robot |
| US10299652B2 (en) | 2007-05-09 | 2019-05-28 | Irobot Corporation | Autonomous coverage robot |
| US8438695B2 (en) | 2007-05-09 | 2013-05-14 | Irobot Corporation | Autonomous coverage robot sensing |
| US11498438B2 (en) | 2007-05-09 | 2022-11-15 | Irobot Corporation | Autonomous coverage robot |
| US8839477B2 (en) | 2007-05-09 | 2014-09-23 | Irobot Corporation | Compact autonomous coverage robot |
| US8255092B2 (en) | 2007-05-14 | 2012-08-28 | Irobot Corporation | Autonomous behaviors for a remote vehicle |
| US20090037033A1 (en)* | 2007-05-14 | 2009-02-05 | Emilie Phillips | Autonomous Behaviors for a Remote Vehicle |
| US8447440B2 (en) | 2007-05-14 | 2013-05-21 | iRobot Coporation | Autonomous behaviors for a remote vehicle |
| US10531859B2 (en) | 2008-01-02 | 2020-01-14 | Arcscan, Inc. | Components for a precision ultrasonic scanning apparatus for body parts |
| US10485509B2 (en)* | 2008-01-02 | 2019-11-26 | Arcscan, Inc. | Tracking system for an ultrasonic arc scanning apparatus |
| US11787060B2 (en) | 2008-03-20 | 2023-10-17 | Teladoc Health, Inc. | Remote presence system mounted to operating room hardware |
| US10875182B2 (en) | 2008-03-20 | 2020-12-29 | Teladoc Health, Inc. | Remote presence system mounted to operating room hardware |
| US11472021B2 (en) | 2008-04-14 | 2022-10-18 | Teladoc Health, Inc. | Robotic based health care system |
| US10471588B2 (en) | 2008-04-14 | 2019-11-12 | Intouch Technologies, Inc. | Robotic based health care system |
| US9616576B2 (en) | 2008-04-17 | 2017-04-11 | Intouch Technologies, Inc. | Mobile tele-presence system with a microphone system |
| US10493631B2 (en) | 2008-07-10 | 2019-12-03 | Intouch Technologies, Inc. | Docking system for a tele-presence robot |
| US9193065B2 (en) | 2008-07-10 | 2015-11-24 | Intouch Technologies, Inc. | Docking system for a tele-presence robot |
| US10878960B2 (en) | 2008-07-11 | 2020-12-29 | Teladoc Health, Inc. | Tele-presence robot system with multi-cast features |
| US9842192B2 (en) | 2008-07-11 | 2017-12-12 | Intouch Technologies, Inc. | Tele-presence robot system with multi-cast features |
| US9429934B2 (en) | 2008-09-18 | 2016-08-30 | Intouch Technologies, Inc. | Mobile videoconferencing robot system with network adaptive driving |
| US8996165B2 (en) | 2008-10-21 | 2015-03-31 | Intouch Technologies, Inc. | Telepresence robot with a camera boom |
| US10875183B2 (en) | 2008-11-25 | 2020-12-29 | Teladoc Health, Inc. | Server connectivity control for tele-presence robot |
| US10059000B2 (en) | 2008-11-25 | 2018-08-28 | Intouch Technologies, Inc. | Server connectivity control for a tele-presence robot |
| US12138808B2 (en) | 2008-11-25 | 2024-11-12 | Teladoc Health, Inc. | Server connectivity control for tele-presence robots |
| US9138891B2 (en) | 2008-11-25 | 2015-09-22 | Intouch Technologies, Inc. | Server connectivity control for tele-presence robot |
| US9381654B2 (en) | 2008-11-25 | 2016-07-05 | Intouch Technologies, Inc. | Server connectivity control for tele-presence robot |
| US20100191375A1 (en)* | 2009-01-29 | 2010-07-29 | Wright Timothy C | Documentation through a remote presence robot |
| US8849680B2 (en) | 2009-01-29 | 2014-09-30 | Intouch Technologies, Inc. | Documentation through a remote presence robot |
| US10969766B2 (en) | 2009-04-17 | 2021-04-06 | Teladoc Health, Inc. | Tele-presence robot system with software modularity, projector and laser pointer |
| US8897920B2 (en) | 2009-04-17 | 2014-11-25 | Intouch Technologies, Inc. | Tele-presence robot system with software modularity, projector and laser pointer |
| US8768516B2 (en) | 2009-06-30 | 2014-07-01 | Intuitive Surgical Operations, Inc. | Control of medical robotic system manipulator about kinematic singularities |
| US11399153B2 (en) | 2009-08-26 | 2022-07-26 | Teladoc Health, Inc. | Portable telepresence apparatus |
| US10911715B2 (en) | 2009-08-26 | 2021-02-02 | Teladoc Health, Inc. | Portable remote presence robot |
| US10404939B2 (en) | 2009-08-26 | 2019-09-03 | Intouch Technologies, Inc. | Portable remote presence robot |
| US9602765B2 (en) | 2009-08-26 | 2017-03-21 | Intouch Technologies, Inc. | Portable remote presence robot |
| US8930023B2 (en) | 2009-11-06 | 2015-01-06 | Irobot Corporation | Localization by learning of wave-signal distributions |
| US11154981B2 (en) | 2010-02-04 | 2021-10-26 | Teladoc Health, Inc. | Robot user interface for telepresence robot system |
| US10314449B2 (en) | 2010-02-16 | 2019-06-11 | Irobot Corporation | Vacuum brush |
| US11058271B2 (en) | 2010-02-16 | 2021-07-13 | Irobot Corporation | Vacuum brush |
| US8800107B2 (en) | 2010-02-16 | 2014-08-12 | Irobot Corporation | Vacuum brush |
| US9089972B2 (en) | 2010-03-04 | 2015-07-28 | Intouch Technologies, Inc. | Remote presence system including a cart that supports a robot face and an overhead camera |
| US11798683B2 (en) | 2010-03-04 | 2023-10-24 | Teladoc Health, Inc. | Remote presence system including a cart that supports a robot face and an overhead camera |
| US10887545B2 (en) | 2010-03-04 | 2021-01-05 | Teladoc Health, Inc. | Remote presence system including a cart that supports a robot face and an overhead camera |
| US10343283B2 (en) | 2010-05-24 | 2019-07-09 | Intouch Technologies, Inc. | Telepresence robot system that can be accessed by a cellular phone |
| US11389962B2 (en) | 2010-05-24 | 2022-07-19 | Teladoc Health, Inc. | Telepresence robot system that can be accessed by a cellular phone |
| US10808882B2 (en) | 2010-05-26 | 2020-10-20 | Intouch Technologies, Inc. | Tele-robotic system with a robot face placed on a chair |
| US10218748B2 (en) | 2010-12-03 | 2019-02-26 | Intouch Technologies, Inc. | Systems and methods for dynamic bandwidth allocation |
| US9264664B2 (en) | 2010-12-03 | 2016-02-16 | Intouch Technologies, Inc. | Systems and methods for dynamic bandwidth allocation |
| US12093036B2 (en) | 2011-01-21 | 2024-09-17 | Teladoc Health, Inc. | Telerobotic system with a dual application screen presentation |
| US9785149B2 (en) | 2011-01-28 | 2017-10-10 | Intouch Technologies, Inc. | Time-dependent navigation of telepresence robots |
| US8965579B2 (en) | 2011-01-28 | 2015-02-24 | Intouch Technologies | Interfacing with a mobile telepresence robot |
| US11289192B2 (en) | 2011-01-28 | 2022-03-29 | Intouch Technologies, Inc. | Interfacing with a mobile telepresence robot |
| US9323250B2 (en) | 2011-01-28 | 2016-04-26 | Intouch Technologies, Inc. | Time-dependent navigation of telepresence robots |
| US9469030B2 (en) | 2011-01-28 | 2016-10-18 | Intouch Technologies | Interfacing with a mobile telepresence robot |
| US10399223B2 (en) | 2011-01-28 | 2019-09-03 | Intouch Technologies, Inc. | Interfacing with a mobile telepresence robot |
| US11468983B2 (en) | 2011-01-28 | 2022-10-11 | Teladoc Health, Inc. | Time-dependent navigation of telepresence robots |
| US10591921B2 (en) | 2011-01-28 | 2020-03-17 | Intouch Technologies, Inc. | Time-dependent navigation of telepresence robots |
| US12224059B2 (en) | 2011-02-16 | 2025-02-11 | Teladoc Health, Inc. | Systems and methods for network-based counseling |
| US10769739B2 (en) | 2011-04-25 | 2020-09-08 | Intouch Technologies, Inc. | Systems and methods for management of information among medical providers and facilities |
| US9974612B2 (en) | 2011-05-19 | 2018-05-22 | Intouch Technologies, Inc. | Enhanced diagnostics for a telepresence robot |
| US9122308B2 (en)* | 2011-09-20 | 2015-09-01 | Samsung Electronics Co., Ltd. | Tactile feedback apparatus, system, and method of operating tactile feedback apparatus |
| US20130069863A1 (en)* | 2011-09-20 | 2013-03-21 | Samsung Electronics Co. Ltd. | Tactile feedback apparatus, system, and method of operating tactile feedback apparatus |
| US10331323B2 (en) | 2011-11-08 | 2019-06-25 | Intouch Technologies, Inc. | Tele-presence system with a user interface that displays different communication links |
| US9715337B2 (en) | 2011-11-08 | 2017-07-25 | Intouch Technologies, Inc. | Tele-presence system with a user interface that displays different communication links |
| US8836751B2 (en) | 2011-11-08 | 2014-09-16 | Intouch Technologies, Inc. | Tele-presence system with a user interface that displays different communication links |
| US9251313B2 (en) | 2012-04-11 | 2016-02-02 | Intouch Technologies, Inc. | Systems and methods for visualizing and managing telepresence devices in healthcare networks |
| US11205510B2 (en) | 2012-04-11 | 2021-12-21 | Teladoc Health, Inc. | Systems and methods for visualizing and managing telepresence devices in healthcare networks |
| US10762170B2 (en) | 2012-04-11 | 2020-09-01 | Intouch Technologies, Inc. | Systems and methods for visualizing patient and telepresence device statistics in a healthcare network |
| US8902278B2 (en) | 2012-04-11 | 2014-12-02 | Intouch Technologies, Inc. | Systems and methods for visualizing and managing telepresence devices in healthcare networks |
| US11628571B2 (en) | 2012-05-22 | 2023-04-18 | Teladoc Health, Inc. | Social behavior rules for a medical telepresence robot |
| US9361021B2 (en) | 2012-05-22 | 2016-06-07 | Irobot Corporation | Graphical user interfaces including touchpad driving interfaces for telemedicine devices |
| US9776327B2 (en) | 2012-05-22 | 2017-10-03 | Intouch Technologies, Inc. | Social behavior rules for a medical telepresence robot |
| US10328576B2 (en) | 2012-05-22 | 2019-06-25 | Intouch Technologies, Inc. | Social behavior rules for a medical telepresence robot |
| US10892052B2 (en) | 2012-05-22 | 2021-01-12 | Intouch Technologies, Inc. | Graphical user interfaces including touchpad driving interfaces for telemedicine devices |
| US10061896B2 (en) | 2012-05-22 | 2018-08-28 | Intouch Technologies, Inc. | Graphical user interfaces including touchpad driving interfaces for telemedicine devices |
| US9174342B2 (en) | 2012-05-22 | 2015-11-03 | Intouch Technologies, Inc. | Social behavior rules for a medical telepresence robot |
| US11515049B2 (en) | 2012-05-22 | 2022-11-29 | Teladoc Health, Inc. | Graphical user interfaces including touchpad driving interfaces for telemedicine devices |
| US10603792B2 (en) | 2012-05-22 | 2020-03-31 | Intouch Technologies, Inc. | Clinical workflows utilizing autonomous and semiautonomous telemedicine devices |
| US11453126B2 (en) | 2012-05-22 | 2022-09-27 | Teladoc Health, Inc. | Clinical workflows utilizing autonomous and semi-autonomous telemedicine devices |
| US10658083B2 (en) | 2012-05-22 | 2020-05-19 | Intouch Technologies, Inc. | Graphical user interfaces including touchpad driving interfaces for telemedicine devices |
| US10780582B2 (en) | 2012-05-22 | 2020-09-22 | Intouch Technologies, Inc. | Social behavior rules for a medical telepresence robot |
| US10265049B2 (en) | 2012-07-09 | 2019-04-23 | Arcscan, Inc. | Combination optical and ultrasonic imaging of an eye |
| CN102825603A (en)* | 2012-09-10 | 2012-12-19 | 江苏科技大学 | Network teleoperation robot system and time delay overcoming method |
| US9098611B2 (en) | 2012-11-26 | 2015-08-04 | Intouch Technologies, Inc. | Enhanced video interaction for a user interface of a telepresence network |
| US10334205B2 (en) | 2012-11-26 | 2019-06-25 | Intouch Technologies, Inc. | Enhanced video interaction for a user interface of a telepresence network |
| US11910128B2 (en) | 2012-11-26 | 2024-02-20 | Teladoc Health, Inc. | Enhanced video interaction for a user interface of a telepresence network |
| US10924708B2 (en) | 2012-11-26 | 2021-02-16 | Teladoc Health, Inc. | Enhanced video interaction for a user interface of a telepresence network |
| US20140154041A1 (en)* | 2012-12-03 | 2014-06-05 | Kabushiki Kaisha Yaskawa Denki | Robot |
| WO2014088965A3 (en)* | 2012-12-03 | 2014-11-20 | Northeastern University | Apparatuses, systems and methods for force feedback |
| US10736605B2 (en) | 2014-02-24 | 2020-08-11 | Arcscan, Inc. | Disposable eyepiece system for an ultrasonic eye scanning apparatus |
| US20170042625A1 (en)* | 2014-04-24 | 2017-02-16 | Covidien Lp | Robotic interface positioning determination systems and methods |
| US10660717B2 (en)* | 2014-04-24 | 2020-05-26 | Covidien Lp | Robotic interface positioning determination systems and methods |
| US20160089781A1 (en)* | 2014-09-30 | 2016-03-31 | Seiko Epson Corporation | Robot, control apparatus and robot system |
| US11426611B2 (en) | 2015-10-13 | 2022-08-30 | Arcscan, Inc. | Ultrasound therapeutic and scanning apparatus |
| US10888301B2 (en) | 2015-10-13 | 2021-01-12 | Arcscan, Inc. | Ultrasonic scanning apparatus |
| CN109070363A (en)* | 2016-03-30 | 2018-12-21 | 索尼公司 | Mechanical arm control method and manipulator control device |
| US11000338B2 (en)* | 2016-03-30 | 2021-05-11 | Sony Corporation | Arm control method and arm control device |
| US11862302B2 (en) | 2017-04-24 | 2024-01-02 | Teladoc Health, Inc. | Automated transcription and documentation of tele-health encounters |
| US11742094B2 (en) | 2017-07-25 | 2023-08-29 | Teladoc Health, Inc. | Modular telehealth cart with thermal imaging and touch screen user interface |
| US11636944B2 (en) | 2017-08-25 | 2023-04-25 | Teladoc Health, Inc. | Connectivity infrastructure for a telehealth platform |
| US11389064B2 (en) | 2018-04-27 | 2022-07-19 | Teladoc Health, Inc. | Telehealth cart that supports a removable tablet with seamless audio/video switching |
| CN111012504A (en)* | 2019-12-23 | 2020-04-17 | 山东中科先进技术研究院有限公司 | A rope-driven joint decoupling mechanism |
| US11602860B2 (en)* | 2020-02-19 | 2023-03-14 | Korea University Research And Business Foundation | Tool changing system of robot manipulator |
| US20210252718A1 (en)* | 2020-02-19 | 2021-08-19 | Korea University Research And Business Foundation | Tool changing system of robot manipulator |
| EP3903718A1 (en)* | 2020-04-28 | 2021-11-03 | Kawasaki Jukogyo Kabushiki Kaisha | Surgical robot |
| US12415269B2 (en) | 2021-06-01 | 2025-09-16 | Forsight Robotics Ltd. | Kinematic structures for robotic microsurgical procedures |
| WO2023100126A1 (en)* | 2021-12-02 | 2023-06-08 | Forsight Robotics Ltd. | Force feedback for robotic microsurgical procedures |
| CN115227390A (en)* | 2022-06-30 | 2022-10-25 | 中国科学院自动化研究所 | Robot main manipulator |
| US11844585B1 (en)* | 2023-02-10 | 2023-12-19 | Distalmotion Sa | Surgical robotics systems and devices having a sterile restart, and methods thereof |
| US12082899B2 (en) | 2023-02-10 | 2024-09-10 | Distalmotion Sa | Surgical robotics systems and devices having a sterile restart, and methods thereof |
| US12089908B2 (en) | 2023-02-10 | 2024-09-17 | Distalmotion Sa | Surgical robotics systems and devices having a sterile restart, and methods thereof |
| US12349998B2 (en) | 2023-02-10 | 2025-07-08 | Distalmotion Sa | Surgical robotics systems and devices having a sterile restart, and methods thereof |
Also Published As
| Publication number | Publication date |
|---|---|
| US6233504B1 (en) | 2001-05-15 |
| US6385509B2 (en) | 2002-05-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6385509B2 (en) | Tool actuation and force feedback on robot-assisted microsurgery system | |
| US12070282B2 (en) | Methods, systems, and devices relating to force control surgical systems | |
| US12161438B2 (en) | Surgical robot systems comprising robotic telemanipulators and integrated laparoscopy | |
| Berkelman et al. | A compact, compliant laparoscopic endoscope manipulator | |
| Kübler et al. | Development of actuated and sensor integrated forceps for minimally invasive robotic surger | |
| Charles et al. | Dexterity-enhanced telerobotic microsurgery | |
| Hagn et al. | Telemanipulator for remote minimally invasive surgery | |
| Zemiti et al. | Mechatronic design of a new robot for force control in minimally invasive surgery | |
| Sastry et al. | Milli-robotics for remote, minimally invasive surgery | |
| CN111770737A (en) | Special tactile hand controller for microsurgery | |
| Begin et al. | A robotic camera for laparoscopic surgery: conception and experimental results | |
| Black et al. | 6-DOF force sensing for the master tool manipulator of the da Vinci surgical system | |
| Schenker et al. | A new robot for high dexterity microsurgery | |
| US10532466B2 (en) | Robotic hand controller | |
| CN113194870B (en) | User interface device, main control console of surgical robot device, and operation method thereof | |
| WO2021107819A1 (en) | Operator controller for controlling a robotic surgical complex | |
| RU2718568C1 (en) | Wrist controller for use in operator's robot-surgery system controller | |
| Berkelman et al. | A compact, modular, teleoperated robotic minimally invasive surgery system | |
| Das et al. | Robot‐Assisted Microsurgery Development at JPL | |
| Wapler | Medical manipulators—a realistic concept? | |
| Qu et al. | A novel haptic master manipulator with a pneumatic-electric mechanism for natural orifice transluminal endoscopic surgery | |
| Das et al. | Tool actuation and force feedback on robot-assisted microsurgery system | |
| MICROSURGERY | I11111 111111ll Ill11 Ill11 IIIII 11111 IIIII IIIII IIIII Ill11 11ll1111ll11l111 | |
| Tzemanaki et al. | μAngelo: A novel minimally invasive surgical system based on an anthropomorphic design | |
| Gupta et al. | Wireless master-slave embedded controller for a teleoperated anthropomorphic robotic arm with gripping force sensing |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| AS | Assignment | Owner name:BAYER, KATHY, DISTRICT OF COLUMBIA Free format text:CONFIRMATORY LICENSE;ASSIGNOR:CALIFORNIA INSTITUTE OF TECHNOLOGY;REEL/FRAME:012688/0457 Effective date:20010620 | |
| AS | Assignment | Owner name:NATIONAL AERONAUTICS AND SPACE ADMINISTRATION, DIS Free format text:CORRECTION TO CORRECT THE CONFIRMATORY LICENSE ASSIGNEE'S INFORMATION PREVIOUSLY RECORDED 012688 FRAME 0457;ASSIGNOR:CALIFORNIA INSTITUTE OF TECHNOLOGY;REEL/FRAME:013140/0386 Effective date:20010620 | |
| FEPP | Fee payment procedure | Free format text:PETITION RELATED TO MAINTENANCE FEES FILED (ORIGINAL EVENT CODE: PMFP); ENTITY STATUS OF PATENT OWNER: LARGE ENTITY | |
| REMI | Maintenance fee reminder mailed | ||
| REIN | Reinstatement after maintenance fee payment confirmed | ||
| FP | Lapsed due to failure to pay maintenance fee | Effective date:20060507 | |
| FPAY | Fee payment | Year of fee payment:4 | |
| SULP | Surcharge for late payment | ||
| FEPP | Fee payment procedure | Free format text:PETITION RELATED TO MAINTENANCE FEES GRANTED (ORIGINAL EVENT CODE: PMFG); ENTITY STATUS OF PATENT OWNER: LARGE ENTITY | |
| PRDP | Patent reinstated due to the acceptance of a late maintenance fee | Effective date:20070220 | |
| STCF | Information on status: patent grant | Free format text:PATENTED CASE | |
| REMI | Maintenance fee reminder mailed | ||
| FPAY | Fee payment | Year of fee payment:8 | |
| SULP | Surcharge for late payment | Year of fee payment:7 | |
| FPAY | Fee payment | Year of fee payment:12 |