TWI737235B - Overtaking assistance method, vehicle-mounted device and readable storage medium - Google Patents
Overtaking assistance method, vehicle-mounted device and readable storage mediumDownload PDFInfo
- Publication number
- TWI737235B TWI737235BTW109109873ATW109109873ATWI737235BTW I737235 BTWI737235 BTW I737235BTW 109109873 ATW109109873 ATW 109109873ATW 109109873 ATW109109873 ATW 109109873ATW I737235 BTWI737235 BTW I737235B
- Authority
- TW
- Taiwan
- Prior art keywords
- vehicle
- overtaking
- lane
- adjacent lane
- assistance method
- Prior art date
Links
- 238000000034methodMethods0.000titleclaimsabstractdescription36
- 230000001133accelerationEffects0.000claimsdescription4
- 238000013507mappingMethods0.000claimsdescription2
- 230000006870functionEffects0.000description14
- 238000012545processingMethods0.000description5
- 238000010586diagramMethods0.000description3
- 238000012549trainingMethods0.000description3
- 238000013528artificial neural networkMethods0.000description2
- 230000006399behaviorEffects0.000description2
- 238000004590computer programMethods0.000description2
- 102100034112Alkyldihydroxyacetonephosphate synthase, peroxisomalHuman genes0.000description1
- 101000799143Homo sapiens Alkyldihydroxyacetonephosphate synthase, peroxisomalProteins0.000description1
- 230000003287optical effectEffects0.000description1
Images



Landscapes
- Traffic Control Systems (AREA)
Abstract
Description
Translated fromChinese本發明涉及一種汽車輔助管理技術領域,尤其涉及一種超車輔助方法、車載裝置及可讀儲存介質。The invention relates to the technical field of automobile auxiliary management, in particular to an overtaking auxiliary method, a vehicle-mounted device and a readable storage medium.
車輛已成為人們生活的必備工具。超車是一種高風險的駕駛行為,當前,駕駛員依駕駛經驗判斷能否超車成功並不可靠。因為每個駕駛員的駕駛經驗不同,且不易同時注意附近所有車輛的行為。特別地,對於在雙向雙車道上駕駛的駕駛員來講,逆向超車更加有難度,因為駕駛員很難準確估計是否能夠安全超車而不與逆向車輛發生碰撞。Vehicles have become an indispensable tool in people's lives. Overtaking is a high-risk driving behavior. At present, it is unreliable for drivers to judge whether they can overtake successfully based on their driving experience. Because each driver has different driving experience, and it is not easy to pay attention to the behavior of all nearby vehicles at the same time. In particular, it is more difficult for drivers driving in two-way two-lane to reverse overtaking because it is difficult for drivers to accurately estimate whether they can overtake safely without colliding with the opposite vehicle.
鑒於以上內容,有必要提供一種超車輔助方法、車載裝置及可讀儲存介質,可輔助駕駛員超車,提升駕車安全。In view of the above, it is necessary to provide an overtaking assistance method, on-board device and readable storage medium, which can assist the driver in overtaking and improve driving safety.
所述超車輔助方法,包括:識別車輛當前所在車道與相鄰車道之間的交通標線的樣式;當基於所述交通標線的樣式確定所述相鄰車道為可超車車道時,利用感測器感測所述車輛的相關駕駛資料;基於所述車輛的相關駕駛資料確定所述車輛能否從所述相鄰車道超車;及當確定所述車輛能從所述相鄰車道超車時,計算所述車輛的超車速度,並發出包括了所述超車速度的提示。The overtaking assistance method includes: recognizing the pattern of the traffic marking between the lane where the vehicle is currently located and the adjacent lane; when it is determined that the adjacent lane is the overtaking lane based on the pattern of the traffic marking, using The sensor senses the relevant driving data of the vehicle; determines whether the vehicle can pass from the adjacent lane based on the relevant driving data of the vehicle; and when it is determined that the vehicle can pass from the adjacent lane When driving, calculate the overtaking speed of the vehicle and issue a prompt including the overtaking speed.
所述電腦可讀儲存介質儲存有至少一個指令,所述至少一個指令被處理器執行時實現所述超車輔助方法。The computer-readable storage medium stores at least one instruction, and when the at least one instruction is executed by a processor, the overtaking assistance method is implemented.
所述車載裝置包括儲存器和至少一個處理器,所述儲存器中儲存有至少一個指令,所述至少一個指令被所述至少一個處理器執行時實現所述超車輔助方法。The vehicle-mounted device includes a storage and at least one processor, and at least one instruction is stored in the storage, and the at least one instruction is executed by the at least one processor to implement the overtaking assistance method.
相較於習知技術,所述超車輔助方法、車載裝置及可讀儲存介質,可輔助駕駛員超車,提升駕車安全。Compared with the prior art, the overtaking assistance method, on-board device and readable storage medium can assist the driver in overtaking and improve driving safety.
100:車輛100: Vehicle
3:車載裝置3: On-board device
32:處理器32: processor
31:儲存器31: Storage
30:超車輔助系統30: Overtaking assistance system
301:識別模組301: Identification Module
302:執行模組302: Execution module
34:攝像頭34: camera
35:顯示熒幕35: display screen
36:定位設備36: positioning device
37:方向燈37: turn signal
38:感測器38: Sensor
39:高精地圖39: High-precision map
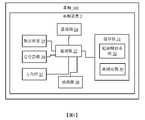
圖1是本發明較佳實施例的車載裝置的架構圖。FIG. 1 is a structural diagram of a vehicle-mounted device according to a preferred embodiment of the present invention.
圖2是本發明較佳實施例的超車輔助系統的功能模組圖。Fig. 2 is a functional module diagram of the overtaking assistance system according to a preferred embodiment of the present invention.
圖3是本發明較佳實施例的超車輔助方法的流程圖。Fig. 3 is a flowchart of a method for assisting overtaking in a preferred embodiment of the present invention.
圖4舉例說明車輛當前所在車道與相鄰車道之間的交通標線。Figure 4 illustrates the traffic markings between the current lane of the vehicle and the adjacent lanes.
為了能夠更清楚地理解本發明的上述目的、特徵和優點,下面結合附圖和具體實施例對本發明進行詳細描述。需要說明的是,在不衝突的情況下,本發明的實施例及實施例中的特徵可以相互組合。In order to be able to understand the above objectives, features and advantages of the present invention more clearly, the present invention will be described in detail below with reference to the accompanying drawings and specific embodiments. It should be noted that the embodiments of the present invention and the features in the embodiments can be combined with each other if there is no conflict.
在下面的描述中闡述了很多具體細節以便於充分理解本發明,所描述的實施例僅僅是本發明一部分實施例,而不是全部的實施例。基於本發明中的實施例,本領域普通技術人員在沒有做出創造性勞動前提下所獲得的所有其他實施例,都屬於本發明保護的範圍。In the following description, many specific details are explained in order to fully understand the present invention. The described embodiments are only a part of the embodiments of the present invention, rather than all the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art without creative work shall fall within the protection scope of the present invention.
除非另有定義,本文所使用的所有的技術和科學術語與屬於本發明的技術領域的技術人員通常理解的含義相同。本文中在本發明的說明書中所使用的術語只是為了描述具體的實施例的目的,不是旨在於限制本發明。Unless otherwise defined, all technical and scientific terms used herein have the same meaning as commonly understood by those skilled in the technical field of the present invention. The terms used in the specification of the present invention herein are only for the purpose of describing specific embodiments, and are not intended to limit the present invention.
參閱圖1所示,為本發明較佳實施例提供的車載裝置的架構圖。Refer to FIG. 1, which is a structural diagram of a vehicle-mounted device provided by a preferred embodiment of the present invention.
本實施例中,車載裝置3設置在車輛100上。所述車載裝置3也可以叫作車載電腦,包括互相之間電氣連接的儲存器31、至少一個處理器32、攝像頭34、顯示熒幕35、定位設備36、方向燈37、感測器38。In this embodiment, the in-vehicle device 3 is installed on the
本領域技術人員應該瞭解,圖1示出的車載裝置3的結構並不構成本發明實施例的限定,所述車載裝置3還可以包括比圖1更多或更少的其他硬體或者軟體,或者不同的部件佈置。Those skilled in the art should understand that the structure of the vehicle-mounted device 3 shown in FIG. 1 does not constitute a limitation of the embodiment of the present invention. The vehicle-mounted device 3 may also include more or less other hardware or software than that of FIG. Or different component arrangements.
需要說明的是,所述車載裝置3僅為舉例,其他現有的或今後可能出現的車載裝置如可適應於本發明,也應包含在本發明的保護範圍以內,並以引用方式包含於此。It should be noted that the in-vehicle device 3 is only an example, and other existing or future in-vehicle devices that can be adapted to the present invention should also be included in the protection scope of the present invention and included here by reference.
在一些實施例中,所述儲存器31可以用於儲存電腦程式的程式碼和各種資料。例如,所述儲存器31可以用於儲存安裝在所述車載裝置3中的超車輔助系統30、高精地圖39,並在車載裝置3的運行過程中實現高速、自動地完成程式或資料的存取。所述儲存器31可以是包括唯讀儲存器(Read-Only Memory,ROM)、可程式設計唯讀儲存器(Programmable Read-Only Memory,PROM)、可抹除可程式設計唯讀儲存器(Erasable Programmable Read-Only Memory,EPROM)、一次可程式設計唯讀儲存器(One-time Programmable Read-Only Memory,OTPROM)、電子抹除式可複寫唯讀儲存器(Electrically-Erasable Programmable Read-Only Memory,EEPROM)、唯讀光碟(Compact Disc Read-Only Memory,CD-ROM)或其他光碟儲存器、磁碟儲存器、磁帶儲存器、或者任何其他能夠用於攜帶或儲存資料的非易失性的電腦可讀的儲存介質。In some embodiments, the storage 31 can be used to store program codes and various data of a computer program. For example, the storage 31 can be used to store the overtaking
在一些實施例中,所述至少一個處理器32可以由積體電路組成。例如,可以由單個封裝的積體電路所組成,也可以是由多個相同功能或不同功能封裝的積體電路所組成,包括一個或者多個中央處理器(Central Processing unit,CPU)、微處理器、數文書處理晶片、圖形處理器及各種控制晶片的組合等。所述至少一個處理器32是所述車載裝置3的控制核心(Control Unit),利用各種介面和線路連接整個車載裝置3的各個部件,透過執行儲存在所述儲存器31內的程式或者模組或者指令,以及調用儲存在所述儲存器31內的資料,以執行車載裝置3的各種功能和處理資料,例如,對超車進行輔助的功能(具體細節參後面對圖3的介紹)。In some embodiments, the at least one processor 32 may be composed of an integrated circuit. For example, it can be composed of a single packaged integrated circuit, or it can be composed of multiple packaged integrated circuits with the same function or different functions, including one or more central processing units (CPU), micro-processing Combinations of processors, digital word processing chips, graphics processors, and various control chips. The at least one processor 32 is the control core (Control Unit) of the in-vehicle device 3, which uses various interfaces and lines to connect the various components of the entire in-vehicle device 3, and executes programs or modules stored in the memory 31 Or commands and calls the data stored in the storage 31 to execute various functions and processing data of the vehicle-mounted device 3, for example, the function of assisting overtaking (for details, refer to the introduction of FIG. 3 later).
在本實施例中,所述攝像頭34可以安裝在所述車輛100的前擋風玻璃所在位置處,只要使得所述攝像頭34能夠拍攝到所述車輛100所在車道與相鄰車道之間的交通標線(Traffic Index Line)即可。本實施例中,所述相鄰車道為所述車輛100當前所在車道的左側相鄰車道或者右側相鄰車道。In this embodiment, the camera 34 may be installed at the position of the front windshield of the
這裡需要說明的是,由於不同國家的交通規則所規定的行駛方向不同,如有的國家規定靠右行駛,有的國家規定靠左行駛。因此,當行駛方向是指靠右行駛時,若從車輛100的左側的相鄰車道超車則為逆向超車。反之,當行駛方向是指靠左行駛時,若從車輛100的右側的相鄰車道超車則為逆向超車。What needs to be explained here is that due to the different driving directions stipulated by the traffic rules of different countries, if some countries require driving on the right, some countries require driving on the left. Therefore, when the driving direction refers to driving on the right, passing the vehicle from the adjacent lane on the left side of the
本實施例中,所述交通標線是指在車道的邊緣用線條向交通參與者傳遞引導、限制、警告等交通資訊的標識。需要說明的是,所述交通標線為不同樣式時指示不同的資訊,具體根據交通規則來定。例如,當某個車道的左側的交通標線的樣式為虛線時則表示該某個車道的左側的相鄰車道可以作為該某個車道的車輛的超車車道(也即所述某個車道的車輛可以變更車道到該某個車道的左側的相鄰車道)。又如,當某個車道的右側的交通標線的樣式為實線時則表示該某個車道的右側的相鄰車道不可以作為所述某個車道的車輛的超車車道(也即所述某個車道的車輛不可以變更車道到該某個車道的右側的相鄰車道)。舉例而言,參閱圖4所示,車道a的右側的交通標線d1的樣式為實線,左側的交通標線d2的樣式為虛線(即車輛100所在車道a與逆向的車道b之間的交通標線d2的樣式為虛線),那麼車道b可以作為車道a上的車輛100的超車車道,車道a上的車輛100可以變更車道到車道b。In this embodiment, the traffic marking refers to a mark used to convey traffic information such as guidance, restriction, and warning to traffic participants at the edge of the lane. It should be noted that when the traffic markings are in different styles, different information is indicated, which is specifically determined according to traffic rules. For example, when the style of the traffic marking on the left side of a certain lane is a dashed line, it means that the adjacent lane on the left side of the certain lane can be used as the overtaking lane for vehicles in the certain lane (that is, the lane of the certain lane). The vehicle can change lanes to the adjacent lane to the left of the certain lane). For another example, when the style of the traffic marking on the right side of a certain lane is a solid line, it means that the adjacent lane on the right side of the certain lane cannot be used as the overtaking lane for vehicles in the certain lane (that is, the lane Vehicles in a certain lane cannot change lanes to the adjacent car on the right side of the certain laneroad). For example, referring to Figure 4, the style of the traffic marking d1 on the right side of the lane a is a solid line, and the style of the traffic marking d2 on the left is a dashed line (that is, between the lane a where the
本實施例中,所述顯示熒幕35可以為觸摸顯示熒幕,用於顯示所述車載裝置3的各種資料,例如顯示高精地圖39的使用者介面。本實施例中,所述高精地圖39可以為百度高精地圖或者其他地圖如谷歌高精地圖。In this embodiment, the display screen 35 may be a touch display screen for displaying various data of the in-vehicle device 3, such as a user interface for displaying a high-definition map 39. In this embodiment, the high-precision map 39 may be a Baidu high-precision map or other maps such as a Google high-precision map.
本實施例中,所述高精地圖39記錄了每條道路的每個車道的左右兩側的交通標線、每條交通標線的樣式等特徵。In this embodiment, the high-precision map 39 records the characteristics of the traffic markings on the left and right sides of each lane of each road, the style of each traffic marking, and the like.
本實施例中,所述定位設備36可以用於定位車輛100當前所處的位置(如經緯度資訊)。在一個實施例中,所述定位設備36可以為全球定位系統(Global Positioning System,簡稱:GPS)、輔助全球衛星定位系統(Assisted Global Positioning System,簡稱:AGPS)、北斗衛星導航系統(BeiDou Navigation Satellite System,BDS),或格洛納斯衛星導航系統(GLOBAL NAVIGATION SATELLITE SYSTEM,GLONASS)中的一者或者多者的組合。In this embodiment, the positioning device 36 may be used to locate the current position of the vehicle 100 (such as latitude and longitude information). In one embodiment, the positioning device 36 may be a global positioning system (Global Positioning System, referred to as GPS), an assisted global positioning system (Assisted Global Positioning System, referred to as AGPS), or BeiDou Navigation Satellite Navigation System (BeiDou Navigation Satellite System). System, BDS), or one or a combination of GLONASS (GLOBAL NAVIGATION SATELLITE SYSTEM, GLONASS).
所述方向燈37用於在車輛100轉向時開啟以提示車輛100的前後左右的其他車輛及行人注意的指示燈。所述方向燈37包括左轉向燈和右轉向燈。The direction lamp 37 is used as an indicator light that is turned on when the
所述感測器38可以為雷達感測器。The sensor 38 may be a radar sensor.
在本實施例中,超車輔助系統30可以包括一個或多個模組,所述一個或多個模組儲存在所述儲存器31中,並由至少一個或多個處理器(本實施例為處理器32)執行,以實現對超車輔助的功能(具體細節參後面對圖3的介紹)。In this embodiment, the overtaking
在本實施例中,所述超車輔助系統30根據其所執行的功能,可以被劃分為多個模組。參閱圖2所示,所述多個模組包括識別模組301、執行模組302。本發明所稱的模組是指一種能夠被至少一個處理器(例如處理器32)所執行並且能夠完成固定功能的一系列電腦可讀的指令段,其儲存在儲存器(例如車載裝置3的儲存器31)中。在本實施例中,關於各模組的功能將在後續結合圖3詳述。In this embodiment, the overtaking
本實施例中,以軟體功能模組的形式實現的集成的單元,可以儲存在一個非易失性可讀取儲存介質中。上述軟體功能模組包括一個或多個電腦可讀指令,所述車載裝置3或一個處理器(processor)透過執行所述一個或多個電腦可讀指令實現本發明各個實施例的方法的部分,例如圖3所示的對超車輔助的方法。In this embodiment, the integrated unit implemented in the form of a software function module can be stored in a non-volatile readable storage medium. The above-mentioned software function module includes one or more computer-readable instructions, and the vehicle-mounted device 3 or a processor (processor) implements part of the method of each embodiment of the present invention by executing the one or more computer-readable instructions. For example, Figure 3 shows the method of assisting overtaking.
在進一步的實施例中,結合圖2,所述至少一個處理器32可執行所述車載裝置3的操作裝置以及安裝的各類應用程式(如所述的超車輔助系統30)、程式碼等。In a further embodiment, with reference to FIG. 2, the at least one processor 32 can execute the operating device of the vehicle-mounted device 3 and various installed applications (such as the overtaking assistance system 30), program codes, etc. .
在進一步的實施例中,所述儲存器31中儲存有電腦程式的程式碼,且所述至少一個處理器32可調用所述儲存器31中儲存的程式碼以執行相關的功能。例如,圖2中所述超車輔助系統30的各個模組是儲存在所述儲存器31中的程式碼,並由所述至少一個處理器32所執行,從而實現所述各個模組的功能以達到對超車進行輔助的目的(詳見下文中對圖3的描述)。In a further embodiment, the computer program code is stored in the storage 31, and the at least one processor 32 can call the code stored in the storage 31 to perform related functions. For example, each module of the overtaking
在本發明的一個實施例中,所述儲存器31儲存一個或多個電腦可讀指令,所述一個或多個電腦可讀指令被所述至少一個處理器32所執行以實現對超車進行輔助的目的。具體地,所述至少一個處理器32對上述電腦可讀指令的具體實現方法詳見下文中對圖3的描述。In an embodiment of the present invention, the storage 31 stores one or more computer-readable instructions, and the one or more computer-readable instructions are executed by the at least one processor 32 to perform overtaking. Auxiliary purpose. Specifically, the specific implementation method of the at least one processor 32 to the above-mentioned computer-readable instructions is detailed in the description of FIG. 3 below.
圖3是本發明較佳實施例提供的超車輔助方法的流程圖。Fig. 3 is a flowchart of an overtaking assistance method provided by a preferred embodiment of the present invention.
在本實施例中,所述超車輔助方法可以應用於車載裝置3中,對於需要進行超車輔助的車載裝置3,可以直接在該車載裝置3上集成本發明的方法所提供的用於超車輔助的功能,或者以軟體開發套件(Software Development Kit,SDK)的形式運行在所述車載裝置3上。In this embodiment, the overtaking assistance method can be applied to the vehicle-mounted device 3. For the vehicle-mounted device 3 that requires overtaking assistance, the vehicle-mounted device 3 can be directly integrated with the overtaking method provided by the method of the present invention. The vehicle-assisted function may run on the vehicle-mounted device 3 in the form of a software development kit (SDK).
如圖3所示,所述超車輔助方法具體包括以下步驟,根據不同的需求,該流程圖中步驟的順序可以改變,某些步驟可以省略。As shown in Fig. 3, the overtaking assistance method specifically includes the following steps. According to different requirements, the order of the steps in the flowchart can be changed, and some steps can be omitted.
步驟S2、當車輛100行駛時,識別模組301識別所述車輛100當前所在車道與相鄰車道之間的交通標線的樣式。Step S2. When the
在一個實施例中,所述相鄰車道為所述車輛100當前所在車道的左側的相鄰車道(簡稱“左側相鄰車道”)或右側的相鄰車道(簡稱“右側相鄰車道”)。In one embodiment, the adjacent lane is the adjacent lane on the left side of the lane where the
在一個實施例中,識別模組301可以從所述高精地圖39識別所述車輛100當前所在車道與所述相鄰車道之間的交通標線的樣式。In an embodiment, the
如前面所述,所述高精地圖39記錄每條道路的各個車道之間交通標線的樣式。As mentioned above, the high-precision map 39 records the pattern of traffic markings between the various lanes of each road.
在其他實施例中,所述識別模組301可以利用攝像頭34拍攝圖像,所述圖像包括所述車輛100當前所在車道與所述相鄰車道之間的交通標線;及利用圖像識別演算法從所述圖像中識別所述車輛100當前所在車道與所述相鄰車道之間的交通標線的樣式。In other embodiments, the
本實施例中,所述攝像頭34可以安裝於所述車輛100的前擋風玻璃所在位置處,只要使得所述攝像頭34能夠拍攝到所述車輛100所在車道與所述相鄰車道之間的交通標線即可。In this embodiment, the camera 34 can be installed at the position of the front windshield of the
本實施例中,所述圖像識別演算法可以為範本匹配法。例如,識別模組301可以將各種樣式(例如虛線、實線)的交通標線分別作為範本,將每種範本與所拍攝的圖像進行匹配,當某種樣式的交通標線與所拍攝的圖像中的交通標線相匹配時,則確定所述交通標線的樣式為所述某種樣式。需要說明的是,所述某種樣式為所述各種樣式中的任意一種。In this embodiment, the image recognition algorithm may be a template matching method. For example, the
在其他實施例中,識別模組301可以於識別到所述相鄰車道為逆向車道時,識別所述車輛100當前所在車道與該相鄰車道之間的交通標線。In other embodiments, the
在一個實施例中,所述識別模組301識別所述相鄰車道是否為逆向車道包括:In one embodiment, the
利用定位設備36在高精地圖39上定位所述車輛100當前所在車道;及從所述高精地圖39獲得所述相鄰車道是同向車道還是逆向車道。Use the positioning device 36 to locate the current lane of the
步驟S3、執行模組302基於所述交通標線的樣式確定所述相鄰車道是否為可超車車道。當確定所述相鄰車道為可超車車道時,執行步驟S4。Step S3: The
本實施例中,當所述交通標線的樣式為虛線時,確定所述相鄰車道為可超車車道。當所述交通標線的樣式為實線時,確定所述相鄰車道不是可超車車道。具體地,所述交通標線為何種樣式的情況下,所述相鄰車道為可超車車道則依據交通規則來定。In this embodiment, when the pattern of the traffic marking is a dotted line, it is determined that the adjacent lane is a lane that can be overtaken. When the pattern of the traffic marking is a solid line, it is determined that the adjacent lane is not an overtaking lane. Specifically, in the case of the style of the traffic marking, whether the adjacent lane is an overtaking lane is determined according to traffic rules.
步驟S4、當確定所述相鄰車道為可超車車道時,執行模組302利用感測器38感測所述車輛100的相關駕駛資料。Step S4: When it is determined that the adjacent lane is an overtaking lane, the
本實施例中,所述感測器38可以為雷達感測器。In this embodiment, the sensor 38 may be a radar sensor.
本實施例中,所述車輛的相關駕駛資料包括,但不限於,所述車輛100與所述車輛100當前所在車道的前方車輛之間的距離、相對速度。該前方車輛也即是和所述車輛100行駛在同一車道,但是行駛在該車輛100的前面的車輛。In this embodiment, the relevant driving information of the vehicle includes, but is not limited to, the distance and relative speed between the
在其他實施例中,執行模組302也可以基於攝像頭34所拍攝的圖像來獲取所述車輛100的所述相關駕駛資料。In other embodiments, the
步驟S5、執行模組302基於所述車輛100的相關駕駛資料確定所述車輛100能否從所述相鄰車道超車。當確定所述車輛100不能從所述相鄰車道超車時,執行步驟S6。當確定所述車輛100能從所述相鄰車道超車時,執行步驟S7。Step S5: The
在一個實施例中,所述基於所述車輛100的相關駕駛資料確定所述車輛100能否從所述相鄰車道超車包括:In one embodiment, the determining whether the
將所述車輛100的相關駕駛資料登錄至預先訓練的超車模型,其中,所述超車模型包括所述車輛100的相關駕駛資料與能否超車成功之間的映射關係(例如,相關駕駛資料A對應超車成功、相關駕駛資料B對應超車失敗),所述超車模型用於基於所述車輛100的相關駕駛資料,輸出所述車輛100能否超車成功的結果。The relevant driving information of the
本實施例中,所述超車模型是基於大量的歷史超車時的相關駕駛資料所訓練而成。所述超車模型可以由所述執行模組302所訓練獲得。例如,執行模組302可以收集預設數量(如10萬份)的樣本資料,每份樣本資料包括一次超車時的所述相關駕駛資料以及對應的超車結果(也即超車成功或超車失敗),基於所述預設數量的樣本資料對神經網路進行訓練,由此獲得所述超車模型。In this embodiment, the overtaking model is trained based on a large amount of historical overtaking related driving data. The overtaking model may be obtained through training by the
需要說明的是,利用樣本資料對神經網路進行訓練獲得一個模型為常見的模型訓練方法,在此不加贅述。It should be noted that using sample data to train a neural network to obtain a model is a common model training method, which will not be repeated here.
步驟S6、當確定所述車輛100不能從所述相鄰車道超車時,執行模組302發出第一提示。例如,所述第一提示可以是指在所述顯示熒幕35上以顯示文字的方式或者利用語音播報的方式提示所述車輛100的駕駛員此時超車有風險,不建議超車。Step S6: When it is determined that the
步驟S7、當確定所述車輛100能從所述相鄰車道超車時,執行模組302計算所述車輛100的超車速度。所述執行模組302還可以發出第二提示,所述第二提示包括所述超車速度。例如,所述執行模組302可以在所述顯示熒幕35上以顯示文字的方式或者利用語音播報的方式提示所述超車速度。在一個實施例中,所述第二提示還包括提示所述車輛100的駕駛員開啟方向燈37。Step S7: When it is determined that the
在一個實施例中,所述超車速度為V2,其中,V22=V12+2as;V1表示所述車輛100的當前速度;a表示預設的加速度;s表示超車時所要行駛的預設距離,為預設值。需要說明的是,a的值的大小可以根據大量的(例如1萬筆)超車成功案例中每個案例所對應的超車時的加速度來確定,例如a可以是該大量的超車成功案例所對應的加速度的平均值。s的值的大小可以根據所述大量的(例如1萬筆)超車成功案例中每個案例所對應的超車時的行駛距離來確定,例如s可以是指該大量的超車成功案例所對應的行駛距離的平均值。其中,每個案例所對應的超車時的行駛距離可以是指從車輛從當前車道變更到相鄰車道,再從相鄰車道回當前車道所要行駛的距離。In one embodiment, the overtaking speed isV2 , whereV22 =V12 +2as ;V1 represents the current speed of the
步驟S8、執行模組302利用所述感測器38探測所述相鄰車道上的車輛(為便於描述,所述相鄰車道上的車輛稱為“逆向車輛”),並於探測到所述相鄰車道的逆向車輛時,基於所述逆向車輛與所述車輛100當前所在車道的前方車輛之間的距離與預設的安全距離之間的比較確定是否需取消超車。當確定需取消超車時,執行步驟S9。當確定無需取消超車時,執行步驟S10。Step S8: The
在一個實施例中,所述執行模組302於所述車輛100行駛到了所述相鄰車道時,利用所述感測器38探測所述相鄰車道上的逆向車輛。具體地,所述執行模組302可以利用所述定位設備36結合所述高精地圖39來確定所述車輛100是否行駛在所述相鄰車道。In one embodiment, the
在一個實施例中,當所述逆向車輛與所述車輛100當前所在車道的前方車輛之間的距離大於所述預設的安全距離時,確定無需取消超車。當所述逆向車輛與所述車輛100當前所在車道的前方車輛之間的距離小於或者等於所述預設的安全距離時,確定需取消超車。In one embodiment, when the distance between the oncoming vehicle and the vehicle in front of the lane where the
本實施例中,所述執行模組302可以利用所述感測器38探測所述逆向車輛與所述車輛100當前所在車道的前方車輛之間的距離。In this embodiment, the
本實施例中,所述預設的安全距離可以為經驗值。例如,該預設的安全距離可以根據大量的(例如1萬筆)超車成功案例中,每個案例所對應的逆向車輛與前方車輛之間的距離來確定,例如該預設的安全距離可以是該大量的超車成功案例所對應的距離的平均值。In this embodiment, the preset safety distance may be an empirical value. For example, the preset safety distance can be determined based on the distance between the opposite vehicle and the preceding vehicle in a large number (for example, 10,000) overtaking success cases. For example, the preset safety distance can be It is the average value of the distance corresponding to the large number of successful cases of overtaking.
步驟S9、當確定需取消超車時,所述執行模組302發出第三提示。所述第三提示可以是指在所述顯示熒幕35上以顯示文字的方式或者利用語音播報的方式提示所述車輛100的駕駛員終止超車。Step S9: When it is determined that the overtaking needs to be cancelled, the
在其他實施例中,當確定需取消超車時,所述執行模組302還控制所述車輛100減速,由此方便駕駛員控制車輛100回到原來的車道(也即是步驟S1中所述的車輛100的當前所在車道)。In other embodiments, when it is determined that the overtaking needs to be cancelled, the
步驟S10、當確定無需取消超車時,所述執行模組302還探測所述車輛100是否已完成超車,並當探測到所述車輛100完成超車時,發出第四提示,所述第四提示包括提示所述車輛100的駕駛員關閉所述方向燈37。Step S10: When it is determined that there is no need to cancel the overtaking, the
在一個實施例中,當利用所述定位設備36結合所述高精地圖39探測到所述車輛100從當前車道行駛到所述相鄰車道再從所述相鄰車道行駛到所述當前車道時,所述執行模組302確定所述車輛100已完成超車。In one embodiment, when the positioning device 36 is used in conjunction with the high-precision map 39 to detect that the
在本發明所提供的幾個實施例中,應該理解到,所揭露的裝置和方法,可以透過其它的方式實現。例如,以上所描述的裝置實施例僅僅是示意性的,例如,所述模組的劃分,僅僅為一種邏輯功能劃分,實際實現時可以有另外的劃分方式。In the several embodiments provided by the present invention, it should be understood that the disclosed device and method can be implemented in other ways. For example, the device embodiments described above are merely illustrative. For example, the division of the modules is only a logical function division, and there may be other division methods in actual implementation.
所述作為分離部件說明的模組可以是或者也可以不是物理上分開的,作為模組顯示的部件可以是或者也可以不是物理單元,即可以位於一個地方,或者也可以分佈到多個網路單元上。可以根據實際的需要選擇其中的部分或者全部模組來實現本實施例方案的目的。The modules described as separate components may or may not be physically separated, and the components displayed as modules may or may not be physical units, that is, they may be located in one place, or they may be distributed to multiple networks Unit. Some or all of the modules may be selected according to actual needs to achieve the objectives of the solutions of the embodiments.
另外,在本發明各個實施例中的各功能模組可以集成在一個處理單元中,也可以是各個單元單獨物理存在,也可以兩個或兩個以上單元集成在一個單元中。上述集成的單元既可以採用硬體的形式實現,也可以採用硬體加軟體功能模組的形式實現。In addition, the functional modules in the various embodiments of the present invention may be integrated into one processing unit, or each unit may exist alone physically, or two or more units may be integrated into one unit. The above-mentioned integrated unit can be realized either in the form of hardware, or in the form of hardware plus software functional modules.
對於本領域技術人員而言,顯然本發明不限於上述示範性實施例的細節,而且在不背離本發明的精神或基本特徵的情況下,能夠以其他的具體形式實現本發明。因此,無論從哪一點來看,均應將實施例看作是示範性的,而且是非限制性的,本發明的範圍由所附請求項而不是上述說明限定,因此旨在將落在請求項的等同要件的含義和範圍內的所有變化涵括在本發明內。不應將請求項中的任何附圖標記視為限制所涉及的請求項。此外,顯然“包括”一詞不排除其他單元或,單數不排除複數。裝置請求項中陳述的多個單元或裝置也可以由一個單元或裝置通過軟體或者硬體來實現。第一,第二等詞語用來表示名稱,而並不表示任何特定的順序。For those skilled in the art, it is obvious that the present invention is not limited to the details of the above exemplary embodiments, and other specific details can be used without departing from the spirit or basic characteristics of the present invention.Form to realize the present invention. Therefore, no matter from which point of view, the embodiments should be regarded as exemplary and non-restrictive. The scope of the present invention is defined by the appended claims rather than the above description, and therefore it is intended to fall within the claims. All changes within the meaning and scope of the equivalent elements of are included in the present invention. Any reference signs in the request shall not be regarded as the request item involved in the restriction. In addition, it is obvious that the word "including" does not exclude other elements or the singular number does not exclude the plural number. Multiple units or devices stated in the device request item may also be implemented by one unit or device through software or hardware. Words such as first and second are used to denote names, but do not denote any specific order.
最後所應說明的是,以上實施例僅用以說明本發明的技術方案而非限制,儘管參照以上較佳實施例對本發明進行了詳細說明,本領域的普通技術人員應當理解,可以對本發明的技術方案進行修改或等同替換,而不脫離本發明技術方案的精神和範圍。Finally, it should be noted that the above embodiments are only used to illustrate the technical solutions of the present invention and not to limit them. Although the present invention has been described in detail with reference to the above preferred embodiments, those of ordinary skill in the art should understand that the The technical solution is modified or equivalently replaced without departing from the spirit and scope of the technical solution of the present invention.
Claims (10)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| TW109109873ATWI737235B (en) | 2020-03-24 | 2020-03-24 | Overtaking assistance method, vehicle-mounted device and readable storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| TW109109873ATWI737235B (en) | 2020-03-24 | 2020-03-24 | Overtaking assistance method, vehicle-mounted device and readable storage medium |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| TWI737235Btrue TWI737235B (en) | 2021-08-21 |
| TW202136094A TW202136094A (en) | 2021-10-01 |
Family
ID=78283283
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| TW109109873ATWI737235B (en) | 2020-03-24 | 2020-03-24 | Overtaking assistance method, vehicle-mounted device and readable storage medium |
Country Status (1)
| Country | Link |
|---|---|
| TW (1) | TWI737235B (en) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105121246A (en)* | 2013-03-27 | 2015-12-02 | 康蒂-特米克微电子有限公司 | Method and device for an overtaking assistance system |
| CN105551282A (en)* | 2014-11-04 | 2016-05-04 | 中国移动通信集团公司 | Overtaking prompting method and apparatus |
| CN108490951A (en)* | 2018-04-24 | 2018-09-04 | 蔡璟 | A kind of anticipation method of overtaking and its system based on automatic Pilot |
| CN108909710A (en)* | 2018-04-25 | 2018-11-30 | 江苏大学 | A driving assistance method and system applied to overtaking conditions |
- 2020
- 2020-03-24TWTW109109873Apatent/TWI737235B/enactive
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105121246A (en)* | 2013-03-27 | 2015-12-02 | 康蒂-特米克微电子有限公司 | Method and device for an overtaking assistance system |
| CN105121246B (en) | 2013-03-27 | 2019-01-25 | 康蒂-特米克微电子有限公司 | Method and apparatus for auxiliary of overtaking other vehicles |
| CN105551282A (en)* | 2014-11-04 | 2016-05-04 | 中国移动通信集团公司 | Overtaking prompting method and apparatus |
| CN105551282B (en) | 2014-11-04 | 2018-08-03 | 中国移动通信集团公司 | One kind is overtaken other vehicles reminding method and device |
| CN108490951A (en)* | 2018-04-24 | 2018-09-04 | 蔡璟 | A kind of anticipation method of overtaking and its system based on automatic Pilot |
| CN108909710A (en)* | 2018-04-25 | 2018-11-30 | 江苏大学 | A driving assistance method and system applied to overtaking conditions |
Also Published As
| Publication number | Publication date |
|---|---|
| TW202136094A (en) | 2021-10-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20200265710A1 (en) | Travelling track prediction method and device for vehicle | |
| CN109426256A (en) | The lane auxiliary system based on driver intention of automatic driving vehicle | |
| JP2020021471A (en) | Patrol of patrol car by subsystem of automatic driving vehicle (adv) | |
| US20190061780A1 (en) | Driving assist system using navigation information and operating method thereof | |
| US20220091616A1 (en) | Autonomous driving method, intelligent control device and autonomous driving vehicle | |
| US20210300372A1 (en) | Driving assistant method, vehicle-mounted device and readable storage medium | |
| US11952004B2 (en) | Lane change assistance method, vehicle-mounted device and readable storage medium | |
| US12036992B2 (en) | Lane change planning method and vehicle-mounted device | |
| CN115107757B (en) | Method, device, vehicle and storage medium for autonomous driving vehicle to pass through intersection | |
| CN114582153B (en) | Ramp entry long solid line reminding method, system and vehicle | |
| CN104316069A (en) | A vehicle navigation device and a navigation method for identifying main and auxiliary roads | |
| US11694544B2 (en) | Traffic safety control method and vehicle-mounted device | |
| JP2020045039A (en) | Vehicle control method and vehicle control apparatus | |
| JP2019164602A (en) | Reverse drive warning system, reverse drive warning method, and reverse drive warning program | |
| CN115290348A (en) | A test method, device and equipment for an intelligent driving assistance system | |
| CN111457934A (en) | Enhanced electronic navigation map based on driver experience and navigation method thereof | |
| TWI737235B (en) | Overtaking assistance method, vehicle-mounted device and readable storage medium | |
| CN109649385B (en) | Driving support device | |
| US11535244B2 (en) | Parking assistance method, vehicle-mounted device and readable storage medium | |
| TWI762887B (en) | Traffic safety control method, vehicle-mounted device and readable storage medium | |
| CN117191064A (en) | Vehicle control method and device, vehicle and storage medium | |
| CN115273511A (en) | Ramp speed limit indication display method, system, electronic equipment and storage medium | |
| TWI758713B (en) | Warning method for vehicle changing lane, vehicle-mounted device | |
| TWI840588B (en) | Vehicle-mounted device and path planning method for lane change | |
| TW202137158A (en) | Method of controlling traffic safety, vehicle-mounted device |