TWI736043B - Multi-target radio frequency positioning system, positioning method and initial distance measurement method - Google Patents
Multi-target radio frequency positioning system, positioning method and initial distance measurement methodDownload PDFInfo
- Publication number
- TWI736043B TWI736043BTW108143709ATW108143709ATWI736043BTW I736043 BTWI736043 BTW I736043BTW 108143709 ATW108143709 ATW 108143709ATW 108143709 ATW108143709 ATW 108143709ATW I736043 BTWI736043 BTW I736043B
- Authority
- TW
- Taiwan
- Prior art keywords
- signal
- tag
- positioning
- antenna
- intermediate frequency
- Prior art date
Links
- 238000000034methodMethods0.000titleclaimsabstractdescription19
- 238000000691measurement methodMethods0.000titleclaimsabstractdescription8
- 230000005540biological transmissionEffects0.000claimsabstractdescription44
- 238000004364calculation methodMethods0.000claimsdescription21
- 238000005259measurementMethods0.000claimsdescription12
- 230000008054signal transmissionEffects0.000claimsdescription8
- 238000010586diagramMethods0.000description14
- 238000005516engineering processMethods0.000description5
- 230000003287optical effectEffects0.000description5
- 238000009434installationMethods0.000description4
- 238000006243chemical reactionMethods0.000description2
- 239000011159matrix materialSubstances0.000description2
- 230000002457bidirectional effectEffects0.000description1
- 239000000523sampleSubstances0.000description1
Images














Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/06—Position of source determined by co-ordinating a plurality of position lines defined by path-difference measurements
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Radar Systems Or Details Thereof (AREA)
Abstract
Translated fromChineseDescription
Translated fromChinese一種射頻定位系統、定位方法及初始距離量測方法,藉由定位標籤及收發器的雙向信號傳輸,進行射頻定位運算定位標籤的座標位置及定位標籤中標籤天線與收發器的初始距離。A radio frequency positioning system, a positioning method, and an initial distance measurement method are used to perform radio frequency positioning calculations to locate the coordinate position of the tag and the initial distance between the tag antenna and the transceiver in the positioning tag through the bidirectional signal transmission of the positioning tag and the transceiver.
應用於手術定位的定位技術包含機械式定位(mechanical positioning)、超音波定位(ultrasound positioning)、電磁定位(electromagnetic positioning)、光學定位(optical positioning)、射頻定位(radio frequency positioning)及X光與CT定位等。目前市面上應用於手術導引(surgical navigation)的定位技術產品,大多數採用光學定位技術中的紅外線定位,由光學探頭(optical probe)及嵌入反光球(reflective sphere)之參考框架(dynamic reference frame, DRF)組成,透過將參考框架安裝於手術器械及患部上,利用光學技術追蹤手術器械及患部的相對位置,再藉由手術導引軟體協助醫師精準操作器械,然而臨床資料顯示,光學定位技術存在直視性遮蔽問題且參考框架體積大,手術空間易受侷限,裝置普遍而言較為笨重,且容易影響醫師操作器械手感。The positioning technologies used in surgical positioning include mechanical positioning, ultrasonic positioning, electromagnetic positioning, optical positioning, radio frequency positioning, and X-ray and CT. Positioning, etc. At present, most of the positioning technology products used in surgical navigation on the market use infrared positioning in optical positioning technology, which consists of an optical probe and a dynamic reference frame embedded in a reflective sphere. , DRF), through the installation of the reference frame on the surgical instrument and the affected part, the optical technology is used to track the relative position of the surgical instrument and the affected part, and then the surgical guidance software is used to assist the doctor in the precise operation of the instrument. However, the clinical data shows that the optical positioning technology There are problems of direct-view obscuration and the reference frame is large in size, the operating space is easily limited, the device is generally bulky, and it is easy to affect the feel of the doctor in operating the instrument.
本發明的主要目的是提供一種射頻定位系統,利用無線射頻的信號傳輸進行定位。The main purpose of the present invention is to provide a radio frequency positioning system that utilizes radio frequency signal transmission for positioning.
本發明多目標射頻定位系統包含有複數個收發器、至少一定位標籤、一信號模組及一運算主機,其中:各收發器包含:一發射電路,連接一發射天線,該發射電路產生一發射信號,透過該發射天線產生與該發射信號相對應的一發射信號電磁波對外傳輸;以及一接收電路,連接一接收天線,該接收電路透過該接收天線截取該至少一定位標籤發出的一調變信號電磁波並產生一調變信號;該至少一定位標籤包含:至少一標籤電路與對應連接該標籤電路的一標籤天線,該標籤天線接收該發射天線對外傳輸的發射信號電磁波,經該標籤電路加入對應該標籤天線的一識別碼,該標籤天線產生該調變信號電磁波向外傳輸;該信號模組包含:至少一處理單元、一多工器、一類比數位轉換器,其中,該至少一處理單元與該多工器連接,每個處理單元會負責處理所對應標籤天線之調變信號,各該處理單元包含有一辨識電路及複數處理電路,該辨識電路提供對應該標籤天線的一識別信號給該些處理電路,供各該處理電路對該調變信號解調變,得到一接收信號,各該處理電路將該發射信號與該接收信號混頻,產生一中頻信號,並傳輸至該多工器,該多工器與該類比數位轉換器連接,藉由該多工器簡化訊號傳輸的通道數,減少該信號模組所需要的類比數位轉換器的通道數量,該類比數位轉換器將該多工器傳輸的中頻信號轉換為數位信號格式;該運算主機連接該類比數位轉換器,將該中頻信號與對應該中頻信號之一初始中頻信號相互比對得到一相位差,由該相位差計算一距離變化量,並根據該距離變化量進行初始距離量測、各該收發器的座標位置量測或是多目標射頻定位。The multi-target radio frequency positioning system of the present invention includes a plurality of transceivers, at least one positioning tag, a signal module and a computing host, wherein:Each transceiver includes:A transmitting circuit connected to a transmitting antenna, the transmitting circuit generates a transmitting signal, and a transmitting signal electromagnetic wave corresponding to the transmitting signal is generated through the transmitting antenna for external transmission; andA receiving circuit connected to a receiving antenna, the receiving circuit intercepts a modulation signal electromagnetic wave emitted by the at least one positioning tag through the receiving antenna and generates a modulation signal;The at least one positioning label includes:At least one tag circuit and a tag antenna corresponding to the tag circuit. The tag antenna receives the electromagnetic wave of the transmitted signal externally transmitted by the transmitting antenna, and adds an identification code corresponding to the tag antenna through the tag circuit, and the tag antenna generates the modulation Signal electromagnetic waves are transmitted outwards;The signal module includes:At least one processing unit, a multiplexer, and an analog-to-digital converter, wherein the at least one processing unit is connected to the multiplexer, and each processing unit is responsible for processing the modulation signal of the corresponding tag antenna, and each processing unit It includes an identification circuit and a complex processing circuit. The identification circuit provides an identification signal corresponding to the tag antenna to the processing circuits for each processing circuit to demodulate the modulated signal to obtain a received signal. Each processing circuit Mix the transmitted signal with the received signal to generate an intermediate frequency signal and transmit it to the multiplexer. The multiplexer is connected to the analog-to-digital converter. The multiplexer simplifies the number of channels for signal transmission. Reduce the number of channels of the analog-to-digital converter required by the signal module. The analog-to-digital converter converts the intermediate frequency signal transmitted by the multiplexer into a digital signal format;The arithmetic host is connected to the analog-to-digital converter, the intermediate frequency signal is compared with an initial intermediate frequency signal corresponding to the intermediate frequency signal to obtain a phase difference, a distance change is calculated from the phase difference, and the distance change is changed according to the phase difference Perform initial distance measurement, coordinate position measurement of each transceiver, or multi-target radio frequency positioning.
本發明初始距離量測方法,測量至少一定位標籤中的至少一標籤天線與複數收發器的初始距離,步驟包含有:The initial distance measurement method of the present invention measures the initial distance between at least one tag antenna in at least one positioning tag and a plurality of transceivers, and the steps include:
計算至少一定位標籤設置於複數個相異且相對位置已知的座標位置時,該標籤天線與設置於複數個相異已知座標位置的複數收發器的距離變化量,當該至少一定位標籤設置於各相對位置已知的座標位置時,係進行以下步驟:各該收發器中的該發射電路產生一發射信號,並透過該發射天線產生一發射信號電磁波向外傳輸;該至少一定位標籤中的該標籤天線接收該發射信號電射波,經過該標籤電路加入與該標籤天線相對應的一識別碼,該標籤天線產生一調變信號電磁波向外傳輸;各該收發器中的該接收天線接收該調變信號電磁波,與該接收天線相連接的該接收電路根據該調變信號電磁波產生一調變信號,並將該調變信號傳送至該信號模組;該信號模組中的該辨識電路產生對應該標籤天線的一識別信號,該處理單元中的各該處理電路藉由該識別信號對該調變信號解調變,產生一接收信號;各該處理電路將該發射信號與該接收信號混頻獲得一中頻信號,再將該中頻信號傳輸至該多工器;該多工器接收該處理單元所傳輸的該中頻信號並傳送至該類比數位轉換器,該類比數位轉換器將該中頻信號轉換為數位信號格式傳輸至該運算主機;該運算主機比對該中頻信號與對應該中頻信號之一初始中頻信號,得到一相位差,藉由該相位差,根據距離變化量的計算公式

該運算主機根據該至少一定位標籤中該標籤天線與各該收發器的距離變化量,計算該標籤天線與各該收發器的初始距離。The computing host calculates the initial distance between the tag antenna and each transceiver according to the distance change between the tag antenna and each transceiver in the at least one positioning tag.
本發明多目標射頻定位方法,測量至少一定位標籤中的至少一標籤天線的座標位置,步驟包含有:The multi-target radio frequency positioning method of the present invention measures the coordinate position of at least one tag antenna in at least one positioning tag, and the steps include:
計算至少一定位標籤設置於待定位的座標位置時,與設置於複數個相異已知座標位置的複數收發器的距離,係進行以下步驟:各該收發器中的該發射電路產生一發射信號,該發射天線產生一發射信號電磁波向外傳輸;該至少一定位標籤中的該標籤天線接收該發射信號電射波,經過該標籤電路加入與該標籤天線相對應的一識別碼,該標籤天線產生一調變信號電磁波向外傳輸;各該收發器中的該接收天線接收該調變信號電磁波,與該接收天線相連接的該接收電路根據該調變信號電磁波產生一調變信號,並將該調變信號傳送至該信號模組;該信號模組中的該辨識電路產生對應該標籤天線的一識別信號,該處理單元中的各該處理電路藉由該識別信號對該調變信號解調變,產生一接收信號;各該處理電路將該發射信號及該接收信號混頻產生一中頻信號,並將該中頻信號傳送至該多工器;該多工器接收該處理單元所傳輸的該中頻信號並傳送至該類比數位轉換器,該類比數位轉換器將該中頻信號轉換為數位信號格式傳輸至該運算主機;以及該運算主機比對該中頻信號與對應該中頻信號之一初始中頻信號,得到一相位差,藉由該相位差,根據距離計算公式
該運算主機根據該至少一定位標籤中該標籤天線與各該收發器的距離及各該收發器的已知座標位置,計算該標籤天線的座標位置。The computing host calculates the coordinate position of the tag antenna according to the distance between the tag antenna and each transceiver in the at least one positioning tag and the known coordinate position of each transceiver.
本發明透過該至少一定位標籤與複數收發器雙向電磁波信號傳輸,計算該至少一定位標籤中該標籤天線與複數收發器的初始距離,可應用於射頻定位裝置的初始化;執行射頻定位時,本發明透過該標籤天線與複數收發器的初始距離,以及各收發器對應該標籤天線的中頻信號與初始中頻信號的相位差,量測該至少一定位標籤中該標籤天線的座標位置及該至少一定位標籤的方位。The present invention calculates the initial distance between the tag antenna and the plurality of transceivers in the at least one positioning tag through the two-way electromagnetic wave signal transmission of the at least one positioning tag and the plurality of transceivers, which can be applied to the initialization of the radio frequency positioning device; when performing radio frequency positioning, this The invention uses the initial distance between the tag antenna and the plurality of transceivers and the phase difference between the intermediate frequency signal and the initial intermediate frequency signal of each transceiver corresponding to the tag antenna to measure the coordinate position of the tag antenna in the at least one positioning tag and the The orientation of at least one locating tag.
請參看圖1所示,本發明多目標射頻定位系統包含有複數收發器10、至少一定位標籤20、一信號模組30及一運算主機40。Please refer to FIG. 1, the multi-target radio frequency positioning system of the present invention includes a plurality of
請參看圖2所示,各該收發器10包含有一發射電路11、一發射天線12、一接收電路13及一接收天線14,該發射電路11與該發射天線12連接,該接收電路13與該接收天線14連接;該發射電路11產生一發射信號,由該發射天線12發射與該發射信號相對應的發射信號電磁波向外傳輸,該接收電路13透過該接收天線14擷取該至少一定位標籤20傳輸的一調變信號電磁波,並產生一調變信號。Please refer to FIG. 2, each of the
請參看圖3所示,該至少一定位標籤20包含有至少一標籤電路21及與該至少一標籤電路21對應連接的一標籤天線22,該標籤天線22接收該發射天線12對外傳輸的該發射信號電磁波,經該標籤電路21加入對應該標籤天線22的一識別碼,該標籤天線22產生該調變信號電磁波向外傳輸,其中,不同的標籤天線22具有不同的識別碼,根據該識別碼即可辨識該調變信號電磁波由哪一個標籤天線22發出。Please refer to FIG. 3, the at least one
請參看圖4A所示,該信號模組30包含有至少一處理單元31、一多工器32及一類比數位轉換器33,該至少一處理單元31與該多工器32連接,每個處理單元31會負責處理所對應標籤天線22之調變信號,因此處理單元31的總數量等同於標籤天線22的總數量,進一步參看圖4B所示,該處理單元31包含有一辨識電路311及複數處理電路312,該辨識電路311提供對應該標籤天線22的識別信號給該些處理電路312,供該些處理電路312對該調變信號解調變,得到一接收信號,並將該發射信號與該接收信號混頻,產生一中頻信號,並傳輸至該多工器32;該多工器32與該類比數位轉換器33連接,藉由該多工器32簡化訊號傳輸的通道數,減少該信號模組30所需要的類比數位轉換器33的通道數量;該類比數位轉換器33將該多工器傳輸的中頻信號轉換為數位信號格式傳輸至該運算主機40;其中,該處理單元31中該些處理電路312的總數量等同於該些收發器10的總數量。Please refer to FIG. 4A. The
該運算主機40連接該類比數位轉換器33,將該中頻信號與對應該中頻信號的一初始中頻信號比對得到一相位差,根據相位差進行距離及位置座標的運算。由於該距離的計算方法是透過信號相位比對獲得,該距離的距離計算誤差會小於一個波長,因此可提升計算該位置座標的精準度。The
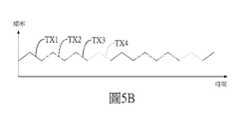
其中,本發明多目標射頻定位系統中該發射信號透過頻率調變,為了能夠區別各該收發器10所產生的發射信號,每個發射電路11會設計成不同的頻率調變區間,如圖5A所示,以使用三個該收發器10為例,則三組發射信號TX1~TX3可以採用不同的頻率調變區間,達到分頻多工;亦可如圖5B所示,以使用四個該收發器10為例,將每個發射電路11設計成在不同時段依序產生發射信號TX1~TX4,達到分時多工;又或者如圖5C所示,以使用四個該收發器10為例,四組發射信號TX1~TX4以分時分頻的方式加以區分,使得同時間或同頻率的發射信號不會重疊,達到區隔識別的目的。Among them, in the multi-target radio frequency positioning system of the present invention, the transmission signal passes through frequency modulation. In order to be able to distinguish the transmission signals generated by the
本發明射頻定位系統進行射頻定位前,需要進行系統初始化,首先對各該收發器10進行位置座標的量測,藉由定位標籤20與收發器10之間雙向電磁波信號傳輸,定位找出各該收發器10的位置座標;定位找出各該收發器10的位置座標後,進行定位標籤20中該標籤天線22與各該收發器10的初始距離測量,以進行定位標籤20的射頻定位計算。Before the radio frequency positioning system of the present invention performs radio frequency positioning, system initialization is required. First, the position coordinates of each
請參看圖6所示,本發明初始距離量測方法,測量該標籤天線22與各該收發器10初始距離的步驟包含有:Please refer to FIG. 6, in the initial distance measurement method of the present invention, the steps of measuring the initial distance between the
S101:計算至少一定位標籤20設置於複數個相異且相對位置已知的座標位置時,與設置於複數個相異已知座標位置的複數收發器10的距離變化量,當該至少一定位標籤20設置於各相對位置已知的座標位置時,本步驟係進行以下步驟S102~S108:S101: When at least one
S102:各該收發器10中的該發射電路11產生一發射信號,並透過該發射天線12產生一發射信號電磁波,將該發射信號以電磁波形式向外傳輸;S102: The transmitting
S103:該至少一定位標籤20中的該標籤天線22接收該發射信號電射波,經過該標籤電路21加入與該標籤天線22相對應的一識別碼,該標籤天線22產生一調變信號電磁波向外傳輸;S103: The
S104:各該收發器10中的該接收天線14接收該調變信號電磁波,與該接收天線14相連接的該接收電路13根據該調變信號電磁波產生一調變信號,並將該調變信號傳送至該信號模組30;S104: The
S105:該信號模組30中該處理單元31中該辨識電路311產生對應該標籤天線22的識別信號,該處理單元31中的各該處理電路312藉由該識別信號對該調變信號解調變,產生一接收信號;S105: The
S106:各該處理電路312將該發射信號與該接收信號混頻獲得一中頻信號IF,再將該中頻信號IF傳輸至該多工器32;S106: Each
S107:該多工器32接收該處理單元31所傳輸的該中頻信號IF並傳送至該類比數位轉換器33,該類比數位轉換器33將該中頻信號IF轉換為數位信號格式傳輸至該運算主機40;S107: The
S108:該運算主機40比對該中頻信號IF與對應該中頻信號IF之一初始中頻信號IF1,得到一相位差∆Ф,藉由該相位差∆Ф,根據距離變化量∆D的計算公式
S109:該運算主機40根據該定位標籤20中該標籤天線22與各該收發器10的距離變化量∆D計算該標籤天線22與各該收發器10的初始距離。S109: The
在步驟S106中,該處理單元31中的各該處理電路312可將第一個發射信號與第一個接收信號混頻所得到的一中頻信號定義為一初始中頻信號。In step S106, each of the
請參看圖7A及圖7B所示,以包含有四個收發器10a~10d、一定位標籤20、一信號模組30及一運算主機40的一射頻定位系統於三維環境中分時多工運作的第一實施例,說明上述步驟S101~S109,而三維環境中至少需要四個相異且相對位置已知的該定位標籤20的位置求解該定位標籤20中各標籤天線22與四個收發器10a~10d的初始距離,本實施例中以六個相異且相對位置已知的該定位標籤20的位置為例,且該定位標籤20包含有三個標籤電路21及三個標籤天線22,為了方便說明以下的電路動作,在此特別將該定位標籤20中的三個標籤天線標示為A1~A3。在環境中擺放該定位標籤20於一第一未知座標位置,並固定設置第一~第四收發器10a~10d於已知座標位置(xa,ya,za)、(xb,yb,zb)、(xc,yc,zc)、(xd,yd,zd),而該些第一~第四收發器10a~10d與一信號模組30連接,該信號模組30包含有三個處理單元31a~31c、一多工器32及一類比數位轉換器33,且該信號模組30與一運算主機40連接。Please refer to FIG. 7A and FIG. 7B. A radio frequency positioning system including four
請參看圖8所示,該定位標籤20可安裝於一治具上,該治具具有多個安裝插槽,各安裝插槽間x軸、y軸、z軸間的距離變化量為已知,以安裝在插槽A及插槽B的定位標籤20座標為例,該定位標籤20安裝於插槽A的座標(xA,yA,zA)及安裝於插槽B的座標(xB,yB,zB)間的x軸距離變化量∆x、y軸的距離變化量∆y及z軸的距離變化量∆z可透過該治具得知,以供該運算主機40進行步驟S109。Please refer to Figure 8, the
首先,該第一收發器10a中的該發射電路11a產生一發射信號Sa,並透過與其連接的該發射天線12a發射與該發射信號Sa相對應的發射信號電磁波Ea,且該發射信號Sa亦會傳送至三個處理單元31a~31c的該處理電路312a中;該定位標籤20透過三個標籤天線A1~A3接收該發射信號電磁波Ea後,由該標籤電路21a加入該標籤天線A1的一識別碼而產生之調變信號電磁波標示為Eat1A1,由該標籤電路21b、21c加入第二、第三標籤天線A2、A3的一識別碼而產生之調變信號電磁波標示為Eat1A2、Eat1A3,三個標籤天線A1~A3將調變信號電磁波Eat1A1、Eat1A2、Eat1A3向外傳輸;該接收天線14a接收調變信號電磁波Eat1A1、Eat1A2、Eat1A3,接著該接收電路13a產生與調變信號電磁波Eat1A1、Eat1A2、Eat1A3相對應的一調變信號Sat1A1、Sat1A2、Sat1A3。First, the transmitting
同理,該第二~第四收發器10b、10c、10d中的該些發射電路11b~11d依序產生發射信號,並透過與其連接的該發射天線12b~12d輸出發射信號電磁波;該定位標籤20透過三個標籤天線A1~A3依序接收該些發射信號電磁波,由該標籤電路21a加入該標籤天線A1的一識別碼而產生之調變信號電磁波標示為Ebt1A1、Ect1A1、Edt1A1,由該標籤電路21b、21c加入第二、第三標籤天線A2、A3的一識別碼而產生之調變信號電磁波標示為Ebt1A2、Ect1A2、Edt1A2、Ebt1A3、Ect1A3、Edt1A3,三個標籤天線A1~A3將該些調變信號電磁波向外傳輸;該些接收天線14b~14d接收該些調變信號電磁波,接著該些接收電路13b~13d產生分別與該些調變信號電磁波相對應的調變信號。In the same way, the transmitting
該信號模組30中的第一處理單元31a接收第一收發器10a所傳輸對應於該標籤天線A1的調變信號Sat1A1,該第一處理單元31a中該辨識電路311a產生對應於該標籤天線A1的一識別信號,供處理電路312a對調變信號Sat1A1解調變,產生相對應的接收信號Sat1A1';第一處理單元31a接收第二~第四收發器10b~10d所傳輸對應於該標籤天線A1的調變信號,該第一處理單元31a中該辨識電路311a產生對應於該標籤天線A1的一識別信號,供處理電路312b~312d對調變信號解調變,產生相對應的接收信號。The
同理,該信號模組30中的第二、第三處理單元31b~31c接收第一收發器10a所傳輸對應於該些標籤天線A2、A3的調變信號Sat1A2、Sat1A3,該第二處理單元31b、該第三處理單元31c中該辨識電路311b、311c產生對應於該些標籤天線A2、A3的一識別信號,供該第二處理單元31b、該第三處理單元31c中各處理電路312a分別對調變信號Sat1A2、Sat1A3解調變,產生相對應的接收信號Sat1A2'、Sat1A3';第二、第三處理單元31b、31c接收第二~第四收發器10b~10d所傳輸對應於該些標籤天線A2、A3的調變信號,該第二處理單元31b、該第三處理單元31c中該辨識電路311b、311c產生對應於該標籤天線A2、A3的一識別信號,供處理電路312b~312d對調變信號解調變,產生相對應的接收信號。Similarly, the second and
該第一處理單元31a將發射信號Sa分別與接收信號Sat1A1'進行混頻,產生第一收發器10a對應於標籤天線A1設置於第一未知位置時的一初始中頻信號Sat1A1'';該第二、第三處理單元31b、31c將發射信號Sa分別與接收信號Sat1A2'、Sat1A3'進行混頻,產生第一收發器10a對應於標籤天線A2、A3設置於第一未知位置時的一初始中頻信號Sat1A2''、Sat1A3''。The
同理,該第一~第三處理單元31a~31c將第二~第四收發器10b~10d的發射信號分別與接收信號進行混頻,產生第二~第四收發器10b~10d對應於標籤天線A1~A3設置於第一未知位置時的初始中頻信號。In the same way, the first to
該多工器32接收該第一~第三處理單元31a~31c所傳輸的該些初始中頻信號,並傳輸至該類比數位轉換器33,該類比數位轉換器33將該些初始中頻信號轉換為數位信號格式,並傳輸至該運算主機40。The
將該定位標籤20放置於一第二位置,該第二位置與該第一未知座標位置的相對位置已知,以第一收發器10a為例,該第一收發器10a中的該發射電路11a產生一發射信號Sa,並透過與其連接的該發射天線12a發射與該發射信號Sa相對應的發射信號電磁波Ea,且該發射信號Sa亦會傳送至三個處理單元31a~31c的該處理電路312a中;該定位標籤20透過三個標籤天線A1~A3接收該發射信號電磁波Ea後,由該標籤電路21a加入該標籤天線A1的一識別碼而產生之調變信號電磁波標示為Eat2A1,由該標籤電路21b、21c加入第二、第三標籤天線A2、A3的一識別碼而產生之調變信號電磁波標示為Eat2A2、Eat2A3,三個標籤天線A1~A3將調變信號電磁波Eat2A1、Eat2A2、Eat2A3向外傳輸;該接收天線14a接收調變信號電磁波Eat2A1、Eat2A2、Eat2A3,接著該接收電路13a產生與調變信號電磁波Eat2A1、Eat2A2、Eat2A3相對應的一調變信號Sat2A1、Sat2A2、Sat2A3。The
該信號模組30中的第一~第三處理單元31a~31c接收第一收發器10a所傳輸對應於該些標籤天線A1~A3的調變信號Sat2A1、Sat2A2、Sat2A3,該第一~第三處理單元31a~31c中該些辨識電路311a~311c產生對應於該些標籤天線A1~A3的一識別信號,供第一~第三處理單元31a~31c中各處理電路312a分別對調變信號Sat2A1、Sat2A2、Sat2A3解調變,產生相對應的接收信號Sat2A1'、Sat2A2'、Sat2A3'。The first to
該第一~第三處理單元31a~31c將發射信號Sa分別與接收信號Sat2A1'、Sat2A2'、Sat2A3'進行混頻,產生第一收發器10a對應於標籤天線A1~A3設置於該第二位置時的一中頻信號Sat2A1''、Sat2A2''、Sat2A3''。The first to
該多工器32接收第一~第三處理單元31a~31c所傳輸該第一收發器10a的中頻信號Sat2A1''、Sat2A2''、Sat2A3'',並傳輸至該類比數位轉換器33,該類比數位轉換器33將中頻信號Sat2A1''、Sat2A2''、Sat2A3''轉換為數位信號格式傳輸至該運算主機40。The
該運算主機將中頻信號Sat2A1''、Sat2A2''、Sat2A3''的相位分別與初始中頻信號Sat1A1''、Sat1A2''、Sat1A3''的相位進行比對,得到該第一收發器10a對應標籤天線A1~A3的相位差∆Фat2A1、∆Фat2A2、∆Фat2A3。The host computer compares thephases of the intermediate frequency signals S at2A1 ``, Sat2A2 '', and Sat2A3 '' with the phases of the initial intermediate frequency signals Sat1A1 '', Sat1A2 '', and Sat1A3 ``, respectively, and obtains The
同理,該第二~第四收發器10b~10d中的該些發射電路11b~11d產生發射信號,並透過與其連接的該些發射天線12b~12d發射與該些發射信號相對應的發射信號電磁波,且該些發射信號亦會傳送至三個處理單元31a~31c的該處理電路312a中;該定位標籤20透過三個標籤天線A1~A3接收該些發射信號電磁波後,由標籤電路21a~21c於該些發射信號電磁波中加入對應於標籤天線A1~A3的一識別碼產生調變信號電磁波,再由三個標籤天線A1~A3將該些調變信號電磁波向外傳輸;該些接收天線14b~14d接收調變信號電磁波,接著該接收電路13b~13d產生與該些調變信號電磁波相對應的調變信號。In the same way, the transmitting
該信號模組30中的第一~第三處理單元31a~31c接收該第二~第四收發器10b~10d所傳輸對應於該些標籤天線A1~A3的調變信號,該第一~第三處理單元31a~31c中該些辨識電路311a~311c產生對應於該些標籤天線A1~A3的一識別訊號,供第一~第三處理單元31a~31c中各處理電路312b~312d分別對調變信號解調變,產生相對應的接收信號。The first to
該第一~第三處理單元31a~31c將該第二~第四收發器10b~10d的發射信號分別與接收信號進行混頻,產生該第二~第四收發器10b~10d對應於標籤天線A1~A3設置於該第二位置時的該些中頻信號。The first to
該多工器32接收第一~第三處理單元31a~31c所傳輸該第二~第四收發器10b~10d的該些中頻信號,並傳輸至該類比數位轉換器33,該類比數位轉換器33將該第二~第四收發器10b~10d的該些中頻信號轉換為數位信號格式傳輸至該運算主機40。The
該運算主機40將該些中頻信號分別與所對應之該些初始中頻信號進行相位比對,得到第二~第四收發器10b~10d對應標籤天線A1~A3的該些相位差。The
接著,將該定位標籤20依序放置於一第三位置、一第四位置、一第五位置、一第六位置上,該第三~第六位置與該第一未知座標位置的相對位置已知,重複上述流程S102~S107,該運算主機40得到該定位標籤20於該第三~第六位置時,第一~第四收發器10a~10d對應標籤天線A1~A3的該些相位差。Then, the
在步驟S108中,以量測該第一收發器10a與標籤天線A1~A3的距離變化量為例,該運算主機40可由該些相位差∆Фat2A1~∆Фat2A3、∆Фat3A1~∆Фat3A3、∆Фat4A1~∆Фat4A3、∆Фat5A1~∆Фat5A3、∆Фat6A1~∆Фat6A3根據公式






在步驟S109中,以標籤天線A1與第一收發器10a為例,該運算主機40透過該標籤天線A1設置於該第二~第六位置時分別與該第一未知座標位置的距離變化量ΔDat2A1~ΔDat6A1,得到下列關係矩陣:
再透過下列關係矩陣得知該定位標籤20中該標籤天線A1設置於該第一未知座標位置時與第一收發器10a的初始距離Dat1A1:
同理,該運算主機40亦可透過上述方法得知該定位標籤20中該標籤天線A1、A2、A3設置於該第一未知座標位置時與第二~第四收發器10b~10d的初始距離。In the same way, the
一定位標籤20中的該標籤天線22經過初始距離量測後,在複數收發器10不移動的情況下,即可透過將該定位標籤20設置於欲定位的目標位置,對欲定位目標進行射頻定位,請參看圖9所示,本發明多目標的射頻定位方法的步驟包含有:After the initial distance measurement of the
S201:計算至少一定位標籤20設置於待定位的座標位置時,該標籤天線22與設置於複數個相異已知座標位置的複數收發器10的距離,係進行以下步驟S202~S208;S201: When calculating the distance between the
S202:各該收發器10中的該發射電路11產生一發射信號,該發射天線12產生一發射信號電磁波向外傳輸;S202: The transmitting
S203:該至少一定位標籤20中的該標籤天線22接收該發射信號電射波,經過該標籤電路21加入與該標籤天線22相對應的一識別碼,該標籤天線22產生一調變信號電磁波向外傳輸;S203: The
S204:各該收發器10中的該接收天線14接收該調變信號電磁波,與該接收天線14相連接的該接收電路13根據該調變信號電磁波產生一調變信號,並將該調變信號傳送至該信號模組30;S204: The receiving
S205:該信號模組30中該辨識電路311產生對應該標籤天線22的一識別信號,該處理單元31中的各該處理電路312藉由該識別信號對該調變信號解調變,產生一接收信號;S205: The
S206:各該處理電路312將該發射信號及該接收信號混頻產生一中頻信號,並將該中頻信號傳送至該多工器32;S206: Each
S207:該多工器32接收該處理單元31所傳輸的該中頻信號並傳送至該類比數位轉換器33,該類比數位轉換器33將該中頻信號轉換為數位信號格式傳輸至該運算主機40;S207: The
S208:該運算主機40比對該中頻信號與對應該中頻信號之一初始中頻信號,得到一相位差∆Ф,藉由該相位差∆Ф,根據距離計算公式
S209:該運算主機40根據該定位標籤20中該標籤天線22與各該收發器10的距離及各該收發器10的已知座標位置,計算該標籤天線22的座標位置。S209: The computing
在步驟S208中,該初始中頻信號為該標籤天線22於該初始距離量測步驟S106中,各該處理電路312將第一個發射信號與第一個接收信號混頻所得到的中頻信號。In step S208, the initial intermediate frequency signal is the intermediate frequency signal obtained by the
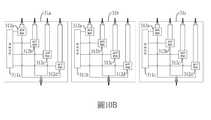
請參看圖10A及圖10B所示,以包含有四個收發器10a~10d、一定位標籤20、一信號模組30及一運算主機40的一射頻定位系統於三維環境中分時多工運作的第二實施例,說明上述步驟S201~S209。本實施例中固定設置第一~第四收發器10a~10d於已知座標位置(xa,ya,za)、(xb,yb,zb)、(xc,yc,zc)、(xd,yd,zd),而該些第一~第四收發器10a~10d與一信號模組30連接,該信號模組30包含有三個處理單元31a~31c、一多工器32及一類比數位轉換器33,且該信號模組30與一運算主機40連接,而該定位標籤20包含有三個標籤電路21及三個標籤天線22,為了方便說明以下的電路動作,在此特別將該定位標籤20中的三個天線標示為A1~A3。Please refer to FIG. 10A and FIG. 10B. A radio frequency positioning system including four
首先,該定位標籤20設置於未知的一欲定位位置,以該標籤天線A1為例,該第一收發器10a中的該發射電路11a產生一發射信號Sa,並透過與其連接的該發射天線12a發射與該發射信號Sa相對應的發射信號電磁波Ea,且該發射信號Sa亦會傳送至該處理單元31a的該處理電路312a中;該定位標籤20透過該標籤天線A1接收該發射信號電磁波Ea後,由該標籤電路21a加入該標籤天線A1的一識別碼,該標籤天線A1產生一調變信號電磁波EatA1向外傳輸;該接收天線14a接收調變信號電磁波EatA1,接著該接收電路13a產生與調變信號電磁波EatA1相對應的一調變信號SatA1。First, the
同理,該些第二~第四收發器10b、10c、10d中的該些發射電路11b~11d依序產生發射信號Sb、Sc、Sd,並透過與其連接的該發射天線12b~12d輸出相對應的發射信號電磁波Eb、Ec、Ed;該定位標籤20透過該標籤天線A1依序接收該些發射信號電磁波Eb、Ec、Ed,由該標籤電路21a於加入該標籤天線A1的一識別碼,該標籤天線A1產生該些調變信號電磁波EbtA1、EctA1、EdtA1向外傳輸;該些接收天線14b~14d接收該些調變信號電磁波EbtA1、EctA1、EdtA1,接著該些接收電路13b~13d產生分別與該些調變信號電磁波相對應的調變信號SbtA1、SctA1、SdtA1。In the same way, the transmitting
該信號模組30中的第一處理單元31a接收第一收發器10a所傳輸對應於該標籤天線A1的調變信號SatA1,該第一處理單元31a中該辨識電路311a產生對應於該標籤天線A1的一識別信號,供處理電路312a對調變信號SatA1解調變,產生相對應的接收信號SatA1';同理,該信號模組30中的第一處理單元31a接收第二~第四收發器10b~10d所傳輸對應於該標籤天線A1的調變信號SbtA1、SctA1、SdtA1,該第一處理單元31a中該辨識電路311產生對應於該標籤天線A1的一識別信號,供處理電路312b~312d對調變信號SbtA1、SctA1、SdtA1解調變,產生相對應的接收信號SbtA1'、SctA1'、SdtA1'。The
該第一處理單元31a將發射信號Sa、Sb、Sc、Sd分別與接收信號SatA1'、SbtA1'、SctA1'、SdtA1'進行混頻,產生第一~第四收發器10a~10d對應於標籤天線A1設置於該欲定位位置時的中頻信號SatA1''、SbtA1''、SctA1''、SdtA1''。The
依此類推,以標籤天線A2、A3為例,該第一~第四收發器10a~10d中的該些發射電路11a~11d產生一發射信號,並透過與其連接的該發射天線12a~12d發射與該發射信號相對應的發射信號電磁波,且該發射信號亦會傳送至該些處理單元31b、31c的該些處理電路312a~312d中;該定位標籤20透過該些標籤天線A2、A3接收該些發射信號電磁波後,由該些標籤電路21b、21c加入該些標籤天線A2、A3的一識別碼,該些標籤天線A2、A3產生該些調變信號電磁波向外傳輸;該些接收天線14a~14d接收調變信號電磁波,接著該些接收電路13a~13d產生與調變信號電磁波相對應的調變信號。By analogy, taking tag antennas A2 and A3 as examples, the transmitting
該信號模組30中的第二、第三處理單元31b、31c接收第一~第四收發器10a~10d所傳輸對應於該些標籤天線A2、A3的調變信號,該第二、第三處理單元31b、31c中該辨識電路311b、311c產生對應於該些標籤天線A2、A3的一識別信號,供該些處理電路312a~312d對調變信號解調變,產生相對應的接收信號;該第二、第三處理單元31b、31c將第一~第四收發器10a~10d的發射信號分別與接收信號進行混頻,產生第一~第四收發器10a~10d對應於標籤天線A2~A3設置於該欲定位位置時的各中頻信號。The second and
第一~第三處理單元31a~31c將第一收發器10a對應於標籤天線A1~A3設置於該欲定位位置時的各中頻信號傳輸至該多工器32,而該多工器32將第一收發器10a對應於標籤天線A1~A3設置於該欲定位位置時的各中頻信號傳送至該類比數位轉換器33,再由該類比數位轉換器33將第一收發器10a對應於標籤天線A1~A3設置於該欲定位位置時的各中頻信號轉換為數位信號格式傳輸至該運算主機40。The first to
同理,該第一~第三處理單元31a~31c依序將第二~第四收發器10b~10d對應於標籤天線A1~A3設置於該欲定位位置時的各中頻信號傳輸至該多工器32,而該多工器32依序將第二~第四收發器10b~10d對應於標籤天線A1~A3設置於該欲定位位置時的各中頻信號傳送至該類比數位轉換器33,再由該類比數位轉換器33依序將第二~第四收發器10b~10d對應於標籤天線A1~A3設置於該欲定位位置時的各中頻信號轉換為數位信號格式傳輸至該運算主機40。In the same way, the first to
該運算主機40藉由該標籤天線A1於該初始距離量測中所得到的初始中頻信號Sat1A1''、Sbt1A1''、Sct1A1''、Sdt1A1'',分別與中頻信號SatA1''、SbtA1''、SctA1''、SdtA1''進行相位比對,得到相位差∆ФatA1、∆ФbtA1、∆ФctA1、∆ФdtA1。The initial operation by the
在步驟S208中,以量測第一~第四收發器10a與標籤天線A1的距離為例,該運算主機40可由該些相位差∆ФatA1、∆ФbtA1、∆ФctA1、∆ФdtA1根據公式



在步驟S209中,以該定位標籤20中的該標籤天線A1為例,該運算主機40可透過該第一~第四收發器10a~10d的已知座標位置(xa,ya,za)、(xb,yb,zb)、(xc,yc,zc)、(xd,yd,zd),根據以下關係式計算該標籤天線A1的座標位置:

同理,該運算主機40可根據上述流程,計算該些標籤天線A2、A3的座標位置(xtA2,ytA2,ztA2)、(xtA3,ytA3,ztA3)。Similarly, the
當該運算主機40得知該些標籤天線A1~A3座標位置後,可進一步依下式計算該定位標籤20的方位(u,v,w)。



於另一實施例中包含四個收發器10a~10d、三個定位標籤20,一信號模組30及一運算主機40,其中,各該定位標籤20具有一個標籤電路21及一個標籤天線22,而該信號模組30具有三個處理單元31a~31c、一多工器32及一類比數位轉換器33,各處理單元31具有一辨識電路311及四個處理電路312a~312d,以下為方便說明,將三個定位標籤20中的該標籤天線22分別標示為A1、A2、A3。該三個定位標籤設置於一欲被定位之目標上。In another embodiment, it includes four
該運算主機40經由該信號模組30,接收該三個處理單元30a~30c輸出的該些中頻信號,並藉由該三個標籤天線A1、A2、A3於初始距離量測中所得到的初始中頻信號及初始距離,分別計算出該三個標籤天線A1、A2、A3的座標位置(xt1A1,yt1A1,zt1A1)、(xt2A2,yt2A2,zt2A2)、(xt3A3,yt3A3,zt3A3),且該運算主機40可再依下式進一步計算該目標物之方位(u,v,w)。

綜上所述,本發明可基於收發器10與定位標籤20之間雙向電磁波信號傳輸,定位找出定位標籤20的座標位置。進一步參看圖11所示,本發明方法可應用於手術定位裝置的術前架設流程及定位流程中,透過該些收發器10的發射信號及接收信號進行射頻定位演算,量測定位標籤20中各標籤天線22與各收發器10的初始距離,在該些收發器10位置已知且固定的情形下,根據各標籤天線22與各收發器10的距離,計算各標籤天線22的座標位置,供手術定位裝置於手術中精準運算安裝於手術器械及病患患部的定位標籤20的位置及方位,以減少因電路延遲使得收發器10天線的相位中心不在收發器10幾何中心上導致的運算誤差,並透過中頻信號相位比對提升標籤天線22的座標位置及定位標籤20的方位的精準度,使醫生能更精準的操作器械,提升施術品質。In summary, the present invention can locate and find the coordinate position of the
10、10a、10b、10c、10d:收發器11、11a、11b、11c、11d:發射電路12、12a、12b、12c、12d:發射天線13、13a、13b、13c、13d:接收電路14、14a、14b、14c、14d:接收天線20:定位標籤21、21a、21b、21c:標籤電路22、A1、A2、A3:標籤天線30:信號模組31、31a、31b、31c:處理單元311、311a、311b、311c:辨識電路312、312a、312b、312c、312d:處理電路32:多工器33:類比數位轉換器40:運算主機TX、TX1、TX2、TX3、TX4:發射信號RX:接收信號IF1:初始中頻信號IF:中頻信號10, 10a, 10b, 10c, 10d:
圖1:本發明多目標射頻定位系統的示意圖。圖2:本發明多目標射頻定位系統中收發器的示意圖。圖3:本發明多目標射頻定位系統中定位標籤的示意圖。圖4A:本發明多目標射頻定位系統中信號模組的示意圖。圖4B:本發明多目標射頻定位系統中處理單元的示意圖。圖5A:不同頻率之發射信號的波形示意圖。圖5B:不同時段之發射信號的波形示意圖。圖5C:不同頻率、不同時段之發射信號的波形示意圖。圖6:測量標籤天線與收發器初始距離的流程圖。圖7A:第一實施例中多目標射頻定位系統的示意圖。圖7B:第一實施例中多目標射頻定位系統的處理單元的示意圖。圖8:第一實施例中定位標籤安裝治具的示意圖。圖9:測量標籤天線座標位置的流程圖。圖10A:第二實施例中多目標射頻定位系統的示意圖。圖10B:第二實施例中多目標射頻定位系統的處理單元的示意圖。圖11:本發明多目標射頻定位系統實際應用的示意圖。Figure 1: Schematic diagram of the multi-target radio frequency positioning system of the present invention.Figure 2: Schematic diagram of the transceiver in the multi-target radio frequency positioning system of the present invention.Figure 3: Schematic diagram of positioning tags in the multi-target radio frequency positioning system of the present invention.Fig. 4A: A schematic diagram of the signal module in the multi-target radio frequency positioning system of the present invention.Fig. 4B: A schematic diagram of the processing unit in the multi-target radio frequency positioning system of the present invention.Figure 5A: Schematic diagram of waveforms of transmitted signals at different frequencies.Figure 5B: Schematic diagram of the waveform of the transmitted signal in different time periods.Figure 5C: Schematic diagram of the waveform of the transmitted signal at different frequencies and different time periods.Figure 6: Flow chart of measuring the initial distance between the tag antenna and the transceiver.Fig. 7A: A schematic diagram of the multi-target radio frequency positioning system in the first embodiment.Fig. 7B: A schematic diagram of the processing unit of the multi-target radio frequency positioning system in the first embodiment.Figure 8: Schematic diagram of the positioning label installation jig in the first embodiment.Figure 9: Flow chart of measuring the coordinate position of the tag antenna.Fig. 10A: A schematic diagram of the multi-target radio frequency positioning system in the second embodiment.Fig. 10B: A schematic diagram of the processing unit of the multi-target radio frequency positioning system in the second embodiment.Figure 11: A schematic diagram of the practical application of the multi-target radio frequency positioning system of the present invention.
10:收發器10: Transceiver
20:定位標籤20: Positioning label
30:信號模組30: Signal module
40:運算主機40: Computing host
Claims (14)
Translated fromChinese


Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| TW108143709ATWI736043B (en) | 2019-11-29 | 2019-11-29 | Multi-target radio frequency positioning system, positioning method and initial distance measurement method |
| CN202010690738.0ACN112881980A (en) | 2019-11-29 | 2020-07-17 | Multi-target radio frequency positioning system, positioning method and initial distance measuring method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| TW108143709ATWI736043B (en) | 2019-11-29 | 2019-11-29 | Multi-target radio frequency positioning system, positioning method and initial distance measurement method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| TW202121255A TW202121255A (en) | 2021-06-01 |
| TWI736043Btrue TWI736043B (en) | 2021-08-11 |
Family
ID=76042894
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| TW108143709ATWI736043B (en) | 2019-11-29 | 2019-11-29 | Multi-target radio frequency positioning system, positioning method and initial distance measurement method |
Country Status (2)
| Country | Link |
|---|---|
| CN (1) | CN112881980A (en) |
| TW (1) | TWI736043B (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113382473B (en)* | 2021-06-10 | 2023-03-24 | 杭州海康威视数字技术股份有限公司 | Positioning method, device, system, equipment and storage medium |
| CN117310603B (en)* | 2023-11-30 | 2024-02-13 | 成都天传科技有限公司 | Method and system for passive wireless positioning of airport equipment group materials |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TW200928419A (en)* | 2007-10-03 | 2009-07-01 | Gnss Technologies Inc | Position information providing system indoor transmitter and method for providing position information |
| US20160363662A1 (en)* | 2008-06-05 | 2016-12-15 | Micron Technology, Inc. | Systems and methods to use radar in rfid systems |
| TW201738582A (en)* | 2016-04-29 | 2017-11-01 | 財團法人金屬工業研究發展中心 | Positioning algorithm for calculating positioning distance using a frequency modulated continuous waveform (FMCW) positioning algorithm together with a triangular positioning method to perform positioning |
| CN107341964A (en)* | 2017-03-27 | 2017-11-10 | 小儒技术(深圳)有限公司 | A kind of method for detecting parking stalls and device |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8546706B2 (en)* | 2002-04-15 | 2013-10-01 | Qualcomm Incorporated | Method and system for obtaining positioning data |
| TW200919324A (en)* | 2007-10-18 | 2009-05-01 | G Time Electronic Co Ltd | RFID system capable of detecting RFID tag orientation, an RFID tag thereof, and a puzzle system using the RFID system |
| US8242888B2 (en)* | 2008-06-05 | 2012-08-14 | Keystone Technology Solutions, Llc | Systems and methods to determine motion parameters using RFID tags |
| JP2012189542A (en)* | 2011-03-14 | 2012-10-04 | Omron Corp | Communication processing device and method for measuring distance in communication processing device |
| KR20160133433A (en)* | 2014-03-17 | 2016-11-22 | 김창범 | Apparatus and Method for managing location of equipment in open storage yard, using rfidtag |
| CN103984971B (en)* | 2014-05-31 | 2017-09-12 | 范志广 | Wireless location method and system based on aerial array phase difference direction finding radio frequency identification |
| CN109375167B (en)* | 2018-07-12 | 2023-09-01 | 中国矿业大学 | Underground passive moving target positioning method |
- 2019
- 2019-11-29TWTW108143709Apatent/TWI736043B/enactive
- 2020
- 2020-07-17CNCN202010690738.0Apatent/CN112881980A/enactivePending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TW200928419A (en)* | 2007-10-03 | 2009-07-01 | Gnss Technologies Inc | Position information providing system indoor transmitter and method for providing position information |
| US20160363662A1 (en)* | 2008-06-05 | 2016-12-15 | Micron Technology, Inc. | Systems and methods to use radar in rfid systems |
| TW201738582A (en)* | 2016-04-29 | 2017-11-01 | 財團法人金屬工業研究發展中心 | Positioning algorithm for calculating positioning distance using a frequency modulated continuous waveform (FMCW) positioning algorithm together with a triangular positioning method to perform positioning |
| CN107341964A (en)* | 2017-03-27 | 2017-11-10 | 小儒技术(深圳)有限公司 | A kind of method for detecting parking stalls and device |
Also Published As
| Publication number | Publication date |
|---|---|
| TW202121255A (en) | 2021-06-01 |
| CN112881980A (en) | 2021-06-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10237698B2 (en) | System and method of locating a radio frequency (RF) tracking device using a calibration routine | |
| TWI736043B (en) | Multi-target radio frequency positioning system, positioning method and initial distance measurement method | |
| CN103308934B (en) | Method for positioning indoor moving persons by aid of WIFI (wireless fidelity) reflected signals | |
| JP6573710B2 (en) | Method and device for aligning device positions | |
| US20110306370A1 (en) | Receiver system, method for arranging the receiver system and positioning system comprising the receiver system | |
| WO2023281506A2 (en) | System and method for determining object location | |
| CN102525553B (en) | Body surface precise positioning system and method for medical ultrasonic probe | |
| CN111257831A (en) | Radio frequency positioning system | |
| Carter et al. | An ultrasonic indoor positioning system for harsh environments | |
| US20250147146A1 (en) | Method for evaluating radar signals in a radar system including multiple sensor units | |
| US10856108B2 (en) | System and method of locating a radio frequency (RF) tracking device using a calibration routine | |
| Carman et al. | A digital beamforming fast-start passive radar for indoor motion detection and angle estimation | |
| CN201654224U (en) | Acoustic-based spatial positioning system | |
| US20240398485A1 (en) | Chip-level positioning method for orthopedic surgery navigation based on ultra-wide bandwidth | |
| US20070001905A1 (en) | Detecting the position of X-ray detector | |
| JP3484995B2 (en) | Instantaneous passive distance measuring device | |
| TWI720711B (en) | Radio frequency positioning method for measuring the position of transceiver | |
| JP2007192573A (en) | Target positioning device | |
| TWI751790B (en) | Radio frequency positioning method | |
| US20040150560A1 (en) | Positioning system and method | |
| US20240168149A1 (en) | Localization and Health Monitoring | |
| CN113109800A (en) | Radio frequency positioning method for measuring position of transceiver | |
| JP2984122B2 (en) | Position measurement system | |
| Rapp et al. | Experimental validation for opto-acoustic distance measurement based on code division multiple access amplitude modulation and differential carrier phase estimation | |
| US10915718B2 (en) | Radio frequency positioning system |