TW202208130A - Exoskeleton load handling device - Google Patents
Exoskeleton load handling deviceDownload PDFInfo
- Publication number
- TW202208130A TW202208130ATW109128028ATW109128028ATW202208130ATW 202208130 ATW202208130 ATW 202208130ATW 109128028 ATW109128028 ATW 109128028ATW 109128028 ATW109128028 ATW 109128028ATW 202208130 ATW202208130 ATW 202208130A
- Authority
- TW
- Taiwan
- Prior art keywords
- herringbone
- thigh
- nitrogen cylinder
- group
- section
- Prior art date
Links
- 230000007246mechanismEffects0.000claimsabstractdescription115
- 210000000689upper legAnatomy0.000claimsabstractdescription97
- 239000000463materialSubstances0.000claimsabstractdescription20
- 238000012546transferMethods0.000claimsabstractdescription4
- 239000002184metalSubstances0.000claimsabstractdescription3
- IJGRMHOSHXDMSA-UHFFFAOYSA-NAtomic nitrogenChemical compoundN#NIJGRMHOSHXDMSA-UHFFFAOYSA-N0.000claimsdescription214
- 210000001624hipAnatomy0.000claimsdescription127
- 229910052757nitrogenInorganic materials0.000claimsdescription107
- 230000037237body shapeEffects0.000claimsdescription13
- 238000005259measurementMethods0.000claimsdescription11
- 230000033001locomotionEffects0.000claimsdescription8
- 238000013461designMethods0.000claimsdescription7
- 238000005452bendingMethods0.000claimsdescription6
- 239000003638chemical reducing agentSubstances0.000claimsdescription5
- 210000002414legAnatomy0.000claimsdescription5
- 238000000034methodMethods0.000claimsdescription5
- 238000006243chemical reactionMethods0.000claimsdescription4
- 230000000694effectsEffects0.000claimsdescription4
- 208000027418Wounds and injuryDiseases0.000claimsdescription2
- 230000003139buffering effectEffects0.000claimsdescription2
- 230000006378damageEffects0.000claimsdescription2
- 208000014674injuryDiseases0.000claimsdescription2
- 230000005540biological transmissionEffects0.000claims1
- 230000007774longtermEffects0.000abstract2
- 208000018650Intervertebral disc diseaseDiseases0.000abstract1
- 208000021600intervertebral disc degenerative diseaseDiseases0.000abstract1
- 210000004705lumbosacral regionAnatomy0.000abstract1
- 238000010586diagramMethods0.000description7
- 210000001503jointAnatomy0.000description5
- 230000008878couplingEffects0.000description4
- 238000010168coupling processMethods0.000description4
- 238000005859coupling reactionMethods0.000description4
- 210000003205muscleAnatomy0.000description4
- 210000000988bone and boneAnatomy0.000description2
- 210000004394hip jointAnatomy0.000description2
- 210000003141lower extremityAnatomy0.000description2
- 210000001364upper extremityAnatomy0.000description2
- 210000000038chestAnatomy0.000description1
- 238000002567electromyographyMethods0.000description1
- 238000012986modificationMethods0.000description1
- 230000004048modificationEffects0.000description1
- 230000008569processEffects0.000description1
- 210000000323shoulder jointAnatomy0.000description1
Images













Landscapes
- Rehabilitation Tools (AREA)
Abstract
Description
Translated fromChinese本發明係關於一種應用於髖關節、腰部關節、背部脊椎、肩部關節,作為保護人體與提供助力,並做輔助搬運用途之外骨骼裝置。The present invention relates to an exoskeleton device applied to hip joints, waist joints, back spine and shoulder joints to protect the human body, provide assistance and assist in carrying.
在習知技術中,外骨骼輔具裝置是一種穿戴式裝置,其可以支撐保護使用者搬運或運動時做動之關節或肌肉。一般來說,常見的外骨骼皆為醫療用途或是搬運用途居多,並且多以單個關節或是特定的部位針對特殊的情境設計保護機制。In the prior art, an exoskeleton assistive device is a wearable device that supports and protects the joints or muscles that the user moves when carrying or exercising. Generally speaking, common exoskeletons are mostly used for medical purposes or transportation, and a single joint or a specific part is designed to protect the mechanism for special situations.
以搬運來說,不僅有搬起重物的階段,人體也需要負擔持物的階段所帶來的負荷,還要能同時兼具移動的靈活性。因此若只是單純針對某個階段來提供人體脊椎、關節與肌肉的保護,並無法有效為搬運整個工作流程提供安全的工作環境。In terms of handling, there is not only the stage of lifting heavy objects, but the human body also needs to bear the load brought by the stage of holding objects, and it must also be able to move flexibly at the same time. Therefore, if only a certain stage is provided to protect the human spine, joints and muscles, it cannot effectively provide a safe working environment for the entire workflow.
本發明是一種外骨骼搬運輔助裝置,包括:The present invention is an exoskeleton carrying auxiliary device, comprising:
一致動器組,其包括馬達與減速機;An actuator group, which includes a motor and a reducer;
一髖部旋轉關節組,其包括包括一髖部轉接塊、一髖部連接塊、一髖部旋轉軸、一軸承;A hip rotation joint group, which includes a hip transfer block, a hip connectionblock, a hip rotation axis, a bearing;
一大腿活動連桿組,包括一大腿連桿、一大腿連桿轉接塊、一大腿旋轉軸、一第一連桿、一第二連桿、一第二連桿轉接塊、一股二頭轉接塊、一股二頭固定板、一軸承、一腿部軟墊;A thigh movable link group, including a thigh link, a thigh link adapter block, a thigh rotation shaft, a first link, a second link, a second link adapter block, a second link Head adapter block, a pair of two-head fixing plate, a bearing, a leg cushion;
一腰部支撐機構組,包括一工學腰帶、一腰帶結合板、一腰部支撐板、一腰部連接板、一腰部輸出板、一腰部肋板;一背部人字骨機構組,包括一氮氣缸基座、一第一節氮氣缸、一第二節氮氣缸、一第三節氮氣缸、一氮氣缸旋轉座、一螺絲轉軸、一氮氣缸轉接塊、一第一節人字骨結構件、一第二節人字骨結構件、一第三節人字骨結構件;A lumbar support mechanism group, including an engineering waist belt, a waist belt combining plate, a waist support plate, a waist connecting plate, a waist output plate, and a waist rib;A back herringbone mechanism group, including a nitrogen cylinder base, a first nitrogen cylinder, a second nitrogen cylinder, a third nitrogen cylinder, a nitrogen cylinder rotating seat, a screw shaft, a nitrogen cylinder rotating A connecting block, a first-segment herringbone structural member, a second-segment herringbone structural member, and a third-segment herringbone structural member;
一肩部支撐機構組,包括一調整滑塊、一拉伸彈簧、一拉伸彈簧螺柱、一背部固定板、一工學背心、一肩部轉接板、一活動鉸鍊、一肩部活動板、一棘齒條。A shoulder support mechanism group, including an adjustment slider, a tension spring, a tension spring stud, a back fixing plate, an engineering vest, a shoulder adapter plate, a living hinge, a shoulder movable plate, a ratchet rack.
一人體包覆材料、一電路控制單元以及一個感測器單元。A body wrapping material, a circuit control unit and a sensor unit.
本發明是一種外骨骼搬運輔助裝置,並且不僅於彎腰拿取物品時就提供助力,再彎起身,搬起物品後背部人字骨機構組也依然提供背部及腰部保護與支撐,並且兼顧人體工學,維持人體搬運正確的姿態;加上髖關節多自由度的設計,使其於行動上無不便之處,在整個搬運的過程皆提供人體關節與肌肉的支撐與保護。The present invention is an exoskeleton carrying auxiliary device, which not only provides assistance when bending down to pick up items, but also provides back and waist protection and support by the back herringbone mechanism group after bending over to pick up items, and taking into account the human body Engineering, to maintain the correct posture of the human body during transportation; coupled with the multi-degree-of-freedom design of the hip joint, it is not inconvenient to move, and provides support and protection for human joints and muscles during the entire transportation process.
在本發明的一實施例中的髖部旋轉關節組,其中髖部旋轉關節組之髖部轉接塊與致動器組連接固定;髖部旋轉關節組之髖部連接塊與大腿活動連桿組之大腿連桿以旋轉軸連接,上述設計具多自由度結構,使人體腰部與髖部可以自由運動,保持致動器組相對於人體之位置與角度。In the hip rotation joint group in an embodiment of the present invention, the hip adapter block of the hip rotation joint group is connected and fixed with the actuator group;The hip connecting block and the thigh link of the thigh movable link group are connected by a rotating shaft. The above design has a multi-degree-of-freedom structure, so that the waist and hips of the human body can move freely, and the position and angle of the actuator group relative to the human body are maintained.
在本發明的一實施例中的腰部支撐機構組,位於腰部支撐機構組兩端各安裝一組致動器組,其各自之輸出端面連接於腰部支撐機構組之腰部輸出板,可左右側平均給予人體搬運時之助力;腰部支撐機構組之腰部支撐板、腰帶結合板與人體包覆材料之工學腰帶接合固定,可提供人體搬運時腰部支撐與緩衝。In the lumbar support mechanism set in an embodiment of the present invention, a set of actuator sets are installed at each end of the lumbar support mechanism set, and their respective output end faces are connected to the lumbar output plate of the lumbar support mechanism set. Provides assistance when carrying the human body; the lumbar support plate and the belt joint plate of the lumbar support mechanism group are fixedly fixed with the engineering waist belt of the human body wrapping material, which can provide lumbar support and cushioning when the human body is transported.
在本發明的一實施例中的背部人字骨機構組,其可分成:第一人字骨機構、第二節人字骨機構及第三節人字骨機構。其中氮氣缸基座與腰部支撐機構組之腰部支撐板鎖固;氮氣缸基座與第一節氮氣缸連接,第一節氮氣缸之另一端與氮氣缸旋轉座連接,氮氣缸旋轉座再與第一節人字骨結構件鎖固,再第一節人字骨結構件與氮氣缸轉接塊鎖固,以完成第一節人字骨機構;而後氮氣缸旋轉座再與第二節氮氣缸連接,第二節氮氣缸另一端與氮氣缸基座連接,氮氣缸基座再與第二節人字骨結構件鎖固,再第二節人字骨結構件與氮氣缸轉接塊鎖固,以完成第二節人字骨機構;再者氮氣缸旋轉座再與第三節氮氣缸連接,第三節氮氣缸另一端與氮氣缸基座連接,氮氣缸基座再與第三節人字骨結構件鎖固,再第三節人字骨結構件與氮氣缸轉接塊鎖固,以完成第三節人字骨機構。In an embodiment of the present invention, the back herringbone mechanism group can be divided into: a first herringbone mechanism, a second herringbone mechanism and a third herringbone mechanism. The nitrogen cylinder base is locked with the waist support plate of the waist support mechanism group; the nitrogen cylinder base is connected with the first nitrogen cylinder, the other end of the first nitrogen cylinder is connected with the nitrogen cylinder rotating seat, and the nitrogen cylinder rotating seat is connected with the nitrogen cylinder rotating seat. The first section of the herringbone structure is locked, and then the first section of the herringbone structure is locked with the nitrogen cylinder adapter block to complete the first section of the herringbone mechanism; then the nitrogen cylinder rotating seat is then locked with the second section of nitrogen The other end of the nitrogen cylinder of the second section is connected to the nitrogen cylinder base, the nitrogen cylinder base is locked with the second section of the herringbone structure, and then the second section of the herringbone structure is locked with the nitrogen cylinder adapter block. To complete the second section of the herringbone mechanism; then the nitrogen cylinder rotating seat is connected to the third section of the nitrogen cylinder, the other end of the third section of the nitrogen cylinder is connected to the nitrogen cylinder base, and the nitrogen cylinder base is connected to the third section. The herringbone structure is locked, and then the third herringbone structure is locked with the nitrogen cylinder adapter block to complete the third herringbone mechanism.
在本發明的一實施例中的背部人字骨機構組,其階層設計,可依據人體身形調整,不限於三組,其中第一節人字骨機構,第一節氮氣缸與氮氣缸旋轉座連接,氮氣缸旋轉座於第一節人字骨機構設計可前彎之有限角度,以配合人體腰部彎腰動作,同時協助維持腰部以人體工學之正確姿態搬運;又第二節人字骨機構、第三節人字骨機構,層層相連,並連結於第一節人字骨機構之上協助腰部於持物時所承受之負擔,達成緩衝與維持姿態效果。In an embodiment of the present invention, the hierarchical design of the back herringbone mechanism group can be adjusted according to the body shape of the human body, and is not limited to three groups, wherein the first section of herringbone mechanism, the first section of nitrogen cylinder and the rotation of nitrogen cylinder The seat connection, the nitrogen cylinder rotating seat is designed in the first section of the herringbone mechanism with a limited angle that can be bent forward to match the bending motion of the human waist, and at the same time help to maintain the correct ergonomic posture of the waist; and the second section of the herringbone The bone mechanism and the third herringbone mechanism are connected layer by layer, and connected to the first herringbone mechanism to help the waist bear the burden when holding objects, so as to achieve the effect of buffering and maintaining posture.
在本發明的一實施例中的氮氣缸,亦可為油壓缸、電動缸、彈簧系統等可壓縮蓄力之等效系統。In an embodiment of the present invention, the nitrogen cylinder can also be an equivalent system that can compress and store force, such as a hydraulic cylinder, an electric cylinder, and a spring system.
在本發明的一實施例中的肩部支撐機構組,其中第三節人字骨結構件與肩部轉接板鎖固,再與肩部活動板鎖固,肩部活動板末端與一棘齒條鎖固,使此結構可與人體貼緊,並可將動力從腰部到背部,再傳導至肩部;搬運時,同時抬舉腰部與背部,降低人體的受傷危險性。In the shoulder support mechanism set in an embodiment of the present invention, the third segment of the herringbone structure is locked with the shoulder adapter plate, and then locked with the shoulder movable plate, and the end of the shoulder movable plate is connected with a spine The rack is locked, so that the structure can be closely attached to the human body, and can transmit the power from the waist to the back, and then to the shoulders; when carrying, the waist and the back are lifted at the same time to reduce the risk of injury to the human body.
在本發明的一實施例中的肩部支撐機構組,其中所述拉伸彈簧螺柱鎖固於調整滑塊兩側,且末端鉤環與拉伸彈簧結合。所述背部固定板與工學背心結合,且背部固定板之正面設有鉤環與拉伸彈簧結合,肩部伸出搬起重物時,此設計可提供一拉力協助搬運。In the shoulder support mechanism set in an embodiment of the present invention, the tension spring studs are locked on both sides of the adjusting slider, and the end shackles are combined with the tension springs. The back fixing plate is combined with the engineering vest, and the front side of the back fixing plate is provided with a hook and loop which is combined with a tension spring. When the shoulders are extended to lift heavy objects, this design can provide a pulling force to assist in carrying.
在本發明的一實施例中的感測器單元包括一位置感測器、一六軸慣性測量單元、一扭力感測器;所述位置感測器設置於腰部輸出板,測量人體上身與下身之角度,將其角度經由IC轉換數位訊號發送至控制器單元;所述六軸慣性測量單元設置於背部人字骨機構組,預測人體姿態,將其姿態經由IC轉換數位訊號發送至控制器單元;所述扭力感測器設置於腰部輸出板,測量之訊號發送至控制單元。In an embodiment of the present invention, the sensor unit includes a position sensor, a six-axis inertial measurement unit, and a torsion sensor; the position sensor is arranged on the waist output plate, and measures the upper body and lower body of the human body the angle, turn its angle through the ICThe digital signal is sent to the controller unit; the six-axis inertial measurement unit is set on the back herringbone mechanism group to predict the posture of the human body, and the posture is sent to the controller unit through the IC conversion digital signal; the torque sensor is set At the waist output board, the measurement signal is sent to the control unit.
在本發明的一實施例中的電路控制單元,包括一控制器單元、一馬達驅動器、一微電腦、一螢幕顯示器、一電池;所述控制器單元接收所有感測器的訊號,且由演算法運算,再發送命令至馬達驅動器並驅動外骨骼搬運輔助裝置;所述微電腦與控制器單元連接,可將控制單元收到的感測器單元相關訊號經由微電腦輸出至螢幕顯示器。The circuit control unit in an embodiment of the present invention includes a controller unit, a motor driver, a microcomputer, a screen display, and a battery; the controller unit receives the signals of all the sensors, and is controlled by an algorithm The microcomputer is connected with the controller unit, and the related signals of the sensor unit received by the control unit can be output to the screen display through the microcomputer.
11:致動器組11: Actuator group
12:髖部旋轉關節組12: Hip Rotation Joint Set
13:左側大腿活動連桿組13: Left thigh active link group
14:右側大腿活動連桿組14: Right thigh active link group
15:腰部支撐機構組15: Lumbar support mechanism group
16:背部人字骨機構組16: Back Herringbone Mechanism Group
17:肩部支撐機構組17: Shoulder support mechanism group
18:人體包覆材料18: Body wrapping material
19:感測器單元19: Sensor unit
20:電路控制單元20: Circuit control unit
111:無刷直流馬達111: Brushless DC Motor
112:馬達固定法蘭外殼112: Motor fixing flange housing
113:減速機113: Reducer
114:輸出法蘭外殼114: Output flange housing
121:髖部轉接塊121: Hip Adapter Block
122:髖部連接塊122: Hip Link Block
123:髖部旋轉軸123: Hip Rotation Axis
124:軸承124: Bearing
131:大腿連桿131: Thigh link
132:大腿連桿轉接塊132: Thigh link adapter block
133:大腿旋轉軸133: thigh rotation axis
134:第一連桿134: The first link
135:第二連桿135: Second Link
136:第二連桿轉接塊136: Second connecting rod adapter block
137:股二頭轉接塊137: Two-end adapter block
138:股二頭固定板138: Two-head fixed plate
139:軸承139: Bearings
152:腰帶結合板152: Belt combination board
153:腰部支撐板153: Lumbar Support Plate
154:腰部連接板154: Waist connection board
155:腰部輸出板155: Waist output board
156:腰部肋板156: Waist Ribs
161:氮氣缸基座161: Nitrogen cylinder base
162a:第一節氮氣缸162a: The first nitrogen cylinder
162b:第二節氮氣缸162b: The second nitrogen cylinder
162c:第三節氮氣缸162c: The third nitrogen cylinder
163:氮氣缸旋轉座163: Nitrogen cylinder rotary seat
164:螺絲轉軸164: Screw shaft
165:氮氣缸轉接塊165: Nitrogen cylinder adapter block
166:第一節人字骨結構件166: Section 1 Herringbone Structural Parts
167:第二節人字骨結構件167: Section 2 Herringbone Structural Parts
168:第三節人字骨機構件168: Section 3 Herringbone Machine Components
171:調整滑塊171: Adjust the slider
172:拉伸彈簧172: Extension Spring
173:拉伸彈簧螺柱173: Extension Spring Stud
174:背部固定板174: Back fixing plate
176:肩部轉接板176:Shoulder adapter plate
177:活動鉸鍊177: Living Hinges
178:肩部活動板178:Shoulder Active Board
181:工學腰帶181: Engineering Belt
182:工學背心182: Engineering vest
183:股二頭軟墊183: Stock Two Head Cushion
184:棘齒條184: Ratchet Rack
185:棘齒扣185: ratchet buckle
191:位置感測器191: Position Sensor
192:六軸慣性測量單元192: Six-axis inertial measurement unit
193:扭力感測器193: Torque sensor
201:控制器單元201: Controller unit
202:馬達驅動器202: Motor drive
203:微電腦203: Microcomputer
204:螢幕顯示器204: screen monitor
圖1係本發明結構立體示意圖。FIG. 1 is a schematic perspective view of the structure of the present invention.
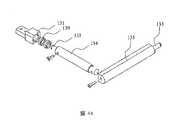
圖2係本發明較佳實施例之致動器組分解圖。FIG. 2 is an exploded view of the actuator assembly according to the preferred embodiment of the present invention.
圖3係本發明較佳實施例之髖部旋轉關節組分解圖。FIG. 3 is an exploded view of the hip rotary joint according to the preferred embodiment of the present invention.
圖4a係本發明較佳實施例之大腿連桿分解圖。FIG. 4a is an exploded view of a thigh link according to a preferred embodiment of the present invention.
圖4b係本發明較佳實施例之第一連桿分解圖Figure 4b is an exploded view of the first connecting rod according to the preferred embodiment of the present invention
圖4c係本發明較佳實施例之股二頭連桿分解圖。FIG. 4c is an exploded view of a two-headed connecting rod according to a preferred embodiment of the present invention.
圖5係本發明較佳實施例之腰部機構示意圖。FIG. 5 is a schematic diagram of a waist mechanism according to a preferred embodiment of the present invention.
圖6係本發明較佳實施例之人字骨機構示意圖。FIG. 6 is a schematic diagram of a herringbone mechanism according to a preferred embodiment of the present invention.
圖7係本發明較佳實施例之肩部機構示意圖。FIG. 7 is a schematic diagram of a shoulder mechanism according to a preferred embodiment of the present invention.
圖8a係本發明較佳實施例之位置感測器配置圖。FIG. 8a is a configuration diagram of a position sensor according to a preferred embodiment of the present invention.
圖8b係本發明較佳實施例之六軸慣性測量單元配置圖。FIG. 8b is a configuration diagram of a six-axis inertial measurement unit according to a preferred embodiment of the present invention.
圖8c係本發明較佳實施例之扭力感測器配置圖。FIG. 8c is a configuration diagram of a torque sensor according to a preferred embodiment of the present invention.
圖9係本發明較佳實施例之電路控制單元配置圖。FIG. 9 is a configuration diagram of a circuit control unit according to a preferred embodiment of the present invention.
本發明一實施例的搬運輔助裝置包括一致動器組、一髖部旋轉關節組、一左側大腿活動連桿組、一右側大腿活動連桿組、一腰部支撐機構組、一背部人字骨機構組、一肩部支撐機構組、一人體包覆材料、一感測器單元及一電路控制單元。所述致動器組連結於腰部支撐機構組之兩側,且兩側之致動器組下方分別與左側大腿活動連桿組、右側大腿活動連桿組以髖部旋轉關節組連接。所述肩部支撐機構組連接於背部人字骨機構組,且背部人字骨機構組連接於腰部支撐機構組上方。所述人體包覆材料設於腰部支撐機構組、背部人字骨機構組、肩部支撐機構組、左側與右側大腿活動連桿組,附有調整功能與緩衝功能,其調整功能可依據個人身形微調,其緩衝功能為了避免人體直接接觸金屬機構件感到不舒適。所述感測器單元設置於人體各部位機構件中。所述電路控制單元設於腰部支撐機構組。The handling auxiliary device according to an embodiment of the present invention includes an actuator group, a hip rotary joint group, a left thigh movable link group, a right thigh movable link group, a waist support mechanism group, and a back herringbone mechanism set, a shoulder support mechanism set, a body wrapping material, a sensor unit and a circuit control unit. The actuator groups are connected to both sides of the lumbar support mechanism group, and the lower parts of the actuator groups on the two sides are respectively connected with the left thigh movable link group and the right thigh movable link group by the hip rotating joint group. The shoulder support mechanism group is connected to the back herringbone mechanism group, and the back herringbone mechanism group is connected above the waist support mechanism group. The human body wrapping material is arranged on the waist support mechanism group, the back herringbone mechanism group, the shoulder support mechanism group, the left and right thigh movable link groups, and has an adjustment function and a buffer function. The adjustment function can be adjusted according to the individual's body. The shape is fine-tuned, and its buffer function is to prevent the human body from directly touching the metal parts and feel uncomfortable. The sensor units are arranged in various parts of the human body. The circuit control unit is arranged in the lumbar support mechanism group.
本發明一實施例的致動器組包括一無刷直流馬達、一馬達固定法蘭外殼、一減速機、一輸出法蘭外殼。The actuator group of an embodiment of the present invention includes a brushless DC motor, a motor fixing flange housing, a reducer, and an output flange housing.
本發明一實施例的髖部旋轉關節組包括一髖部轉接塊、一髖部連接塊、一髖部旋轉軸、一軸承。所述髖部連接塊以螺絲鎖固的方式固定於馬達固定法蘭外殼。所述髖部轉接塊內部與髖部連接塊內部各設有一軸承,兩者以一髖部旋轉軸插入兩者軸承內連接,並提供人體額狀軸之自由度,符合人體工學之人體前彎後仰及人體行走之動作。A hip rotation joint group according to an embodiment of the present invention includes a hip adapter block, a hip connection block, a hip rotation shaft, and a bearing. The hip connecting block is fixed to the motor fixing flange housing by means of screw locking. The inside of the hip adapter block and the inside of the hip connection block are each provided with a bearing, and the two are connected with a hip rotation axis inserted into the two bearings, and provide the degree of freedom of the frontal axis of the human body, conforming to the ergonomic human body The movements of bending forward and backward and walking of the human body.
本發明一實施例的左側大腿活動連桿組與一右側大腿活動連桿組彼此為鏡射的組件,因此僅闡述左側大腿活動連桿組。所述左側大腿活動連桿組包括一大腿連桿、一大腿連桿轉接塊、一大腿旋轉軸、一第一連桿、一第二連桿、一第二連桿轉接塊、一股二頭轉接塊以、一股二頭固定板及一軸承。所述大腿旋轉軸一詞用於旋轉連接處,且提供相對旋轉自由度。所述大腿連桿與上述髖部連接塊之另一側內部各設有一軸承,兩者連接方式以一大腿旋轉軸插入兩者軸承內提供人體矢狀軸之自由度,符合人體工學之腿部側向活動。所述大腿連桿轉接塊與大腿連桿以螺絲鎖固方式固定,且大腿連桿轉接塊之一側內部設有一軸承。所述第一連桿內部設有一大腿旋轉軸以螺絲鎖固方式固定,且此處大腿旋轉軸插入大腿連桿轉接塊內部軸承。所述第二連桿與第一連桿之另一側以螺絲鎖固方式固定。所述第二連桿轉接塊內部設有一軸承與第二連桿另一側以一大腿旋轉軸連接,且第二連桿與大腿旋轉軸以螺絲鎖固方式固定。所述股二頭轉接塊與第二連桿轉接塊內部各設有一軸承,且兩者以一大腿旋轉軸連接。所述股二頭固定板與股二頭轉接塊以螺絲鎖固方式固定。In an embodiment of the present invention, the left thigh movable link group and a right thigh movable link group are mirrored components of each other, so only the left thigh movable link group will be described. The left thigh movable link group includes a thigh link, a thigh link adapter block, a thigh rotation shaft, a first link, a second link, a second link adapter block, a Two-end adapter block, a second-end fixing plate and a bearing. The term thigh axis of rotation is used for rotational joints and provides relative rotational degrees of freedom. The thigh connecting rod and the other side of the hip connecting block are each provided with a bearing, and the connection method of the two is that a thigh rotating shaft is inserted into the bearings to provide the freedom of the sagittal axis of the human body, which is in line with ergonomic legs. Lateral movement. The thigh link adapter block and the thigh link are fixed in a screw locking manner, and a bearing is provided inside one side of the thigh link adapter block. The inside of the first connecting rod is provided with a thigh rotating shaft which is fixed by screw locking, and here the thigh rotating shaft is inserted into the inner bearing of the connecting block of the thigh connecting rod. The second link and the other side of the first link are fixed by screw locking. A bearing is arranged inside the second connecting rod adapter block and the other side of the second connecting rod is connected with a thigh rotating shaft, and the second connecting rod and the thigh rotating shaft are fixed by screw locking. A bearing is respectively provided inside the two-end connecting block and the second connecting rod connecting block, and the two are connected by a thigh rotating shaft. The two-end fixing plate and the two-end connecting block are fixed by means of screw locking.
本發明一實施例的腰部支撐機構組包括一工學腰帶、一腰帶結合板、一腰部支撐板、一腰部連接板、一腰部輸出板、一腰部肋板。所述工學腰帶以鉚接方式固定於腰帶結合板,工學腰帶附有調節機制,根據個人身形調整適當的尺寸。所述腰部支撐板與工學腰帶以螺絲鎖固的方式固定,其中腰帶結合板夾於二者中。所述腰部連接板與腰部支撐板以螺絲鎖固的方式,鎖固於腰部支撐板的兩側。所述腰部輸出板一側與致動器組的輸出法蘭外殼以螺絲鎖固的方式固定,且另一側與腰部連接板以螺絲鎖固的方式固定。所述腰部肋板與腰部支撐板、腰部輸出板以螺絲鎖固的方式固定。The lumbar support mechanism set of an embodiment of the present invention includes an engineering waist belt, a waist belt combining plate, a waist support plate, a waist connecting plate, a waist output plate, and a waist rib. The engineering waistband is fixed on the waistband coupling plate by riveting, and the engineering waistband is provided with an adjustment mechanism to adjust the appropriate size according to the individual body shape. The lumbar support plate and the engineering waistband are fixed by means of screw locking, and the waistband joint plate is clamped between the two.middle. The waist connecting plate and the waist support plate are locked on both sides of the waist support plate by means of screw locking. One side of the waist output plate is fixed to the output flange shell of the actuator group by means of screw locking, and the other side is fixed to the waist connecting plate by means of screw locking. The lumbar rib, the lumbar support plate and the lumbar output plate are fixed by means of screw locking.
本發明一實施例的背部人字骨機構組包括一氮氣缸基座、一第一節氮氣缸、一第二節氮氣缸、一第三節氮氣缸、一氮氣缸旋轉座、一螺絲轉軸、一氮氣缸轉接塊、一第一節人字骨結構件、一第二節人字骨結構件、一第三節人字骨結構件。所述氮氣缸基座分別以螺絲鎖固的方式固定於腰部支撐板、第二節人字骨結構件以及第三節人字骨機構件之左右兩側。所述第一節氮氣缸一側與氮氣缸基座以螺絲轉軸插入二者並固定於腰部支撐板,且第一節氮氣缸另一側與氮氣缸旋轉座以螺絲轉軸插入二者固定。所述氮氣缸旋轉座以螺絲鎖固方式固定於第一節人字骨結構件之左右兩側位置。所述氮氣缸轉接塊以螺絲鎖固方式固定於第一節人字骨結構件和第二節人字骨結構件之中間位置之中間位置。所述第二節氮氣缸一側與氮氣缸轉接塊以螺絲轉軸插入二者並固定於第一節人字骨結構件,且第二節氮氣缸另一側與氮氣缸基座以螺絲轉軸插入二者並固定於第二節人字骨結構件之左右兩側位置。所述第三節氮氣缸一側與氮氣缸轉接塊以螺絲轉軸插入二者並固定於第三節人字骨結構件,且第三節氮氣缸另一側與氮氣缸基座以螺絲轉軸插入二者並固定於第二節人字骨之左右兩側位置。The back herringbone mechanism set of an embodiment of the present invention includes a nitrogen cylinder base, a first nitrogen cylinder, a second nitrogen cylinder, a third nitrogen cylinder, a nitrogen cylinder rotating seat, a screw shaft, A nitrogen cylinder adapter block, a first section of herringbone structure, a second section of herringbone structure, and a third section of herringbone structure. The nitrogen cylinder base is respectively fixed on the left and right sides of the lumbar support plate, the second section of the herringbone structural member and the third section of the herringbone mechanism member by means of screw locking. One side of the nitrogen cylinder of the first section and the nitrogen cylinder base are inserted into the two with screw shafts and fixed to the waist support plate, and the other side of the first section of nitrogen cylinder and the nitrogen cylinder rotating seat are inserted into the two with screw shafts and fixed. The nitrogen cylinder rotating seat is fixed on the left and right sides of the first section of the herringbone structural member by means of screw locking. The nitrogen cylinder adapter block is fixed in the middle position of the middle position of the first section of the herringbone structural member and the second section of the herringbone structural member in a screw locking manner. One side of the nitrogen cylinder of the second section and the nitrogen cylinder adapter block are inserted into the two with a screw shaft and fixed to the first section of the herringbone structural member, and the other side of the second section of the nitrogen cylinder and the nitrogen cylinder base are connected with a screw shaft Insert the two and fix them on the left and right sides of the second herringbone structure. One side of the nitrogen cylinder of the third section and the nitrogen cylinder adapter block are inserted into the two with a screw shaft and fixed to the third section of the herringbone structure, and the other side of the third section of the nitrogen cylinder and the nitrogen cylinder base are connected with a screw shaft Insert the two and fix them on the left and right sides of the second herringboneLocation.
本發明一實施例的肩部支撐機構組包括一調整滑塊、一拉伸彈簧、一拉伸彈簧螺柱、一背部固定板、工學背心、一肩部轉接板、一活動鉸鍊、一肩部活動板、一棘齒條。所述調整滑塊以螺絲鎖固的方式固定於第三節人字骨結構件,第三節人字骨結構件中之調節孔位依據個人身形調整。所述拉伸彈簧螺柱鎖固於調整滑塊兩側,且末端鉤環與拉伸彈簧結合。所述背部固定板以鉚接方式與工學背心結合,且背部固定板之正面設有鉤環與拉伸彈簧結合。所述肩部轉接板一側以螺絲鎖固方式固定於第三節人字骨。所述活動鉸鍊以螺絲鎖固方式固定於肩部轉接板與肩部活動板。所述肩部活動板末端設有一孔位以螺絲鎖固方式與棘齒條結合。A shoulder support mechanism set according to an embodiment of the present invention includes an adjustment slider, a tension spring, a tension spring stud, a back fixing plate, an engineering vest, a shoulder adapter plate, a living hinge, a Shoulder movable plate, a ratchet rack. The adjusting slider is fixed on the third section of the herringbone structural member by means of screw locking, and the position of the adjustment hole in the third section of the herringbone structural member is adjusted according to the individual body shape. The tension spring studs are locked on both sides of the adjustment slider, and the end shackles are combined with the tension spring. The back fixing plate is combined with the engineering vest by riveting, and the front surface of the back fixing plate is provided with a hook and loop to be combined with the tension spring. One side of the shoulder adapter plate is fixed to the third segment of the herringbone by screw locking. The living hinge is fixed to the shoulder adapter plate and the shoulder movable plate in a screw locking manner. The end of the shoulder movable plate is provided with a hole to be combined with the ratchet rack in a screw locking manner.
本發明一實施例的人體包覆材料包括一工學腰帶、一工學背心、一股二頭軟墊、一棘齒條、一棘齒扣。其人體包覆材料分別與整體裝置之多處零件結合,其結合方式由下方說明。所述工學腰帶以鉚接方式固定於腰帶結合板,工學腰帶附有調節機制,根據個人身形調整適當的尺寸。所述工學背心以鉚接方式與背部固定板結合。所述股二頭軟墊設於股二頭固定板,二者以魔鬼氈結合。所述棘齒扣與股二頭軟墊末端孔位結合固定。所述棘齒條與股二頭固定板之孔位結合固定。所述棘齒條與棘齒扣分別固定於二者不同的實體上,將棘齒條插入棘齒扣可依據個人身形調整適當的鬆緊度。為了讓裝置能夠達到應有的傳導力以及效益,所有可調尺寸之鬆緊度依個人舒適為主調整越緊越佳。The human body wrapping material of an embodiment of the present invention includes an engineering waistband, an engineering vest, a pair of two-head cushions, a ratchet rack, and a ratchet buckle. The body wrapping material is combined with multiple parts of the overall device, and the combination method is described below. The engineering waistband is fixed on the waistband coupling plate by riveting, and the engineering waistband is provided with an adjustment mechanism to adjust the appropriate size according to the individual body shape. The engineering vest is combined with the back fixing plate in a riveting manner. The two-head soft pad is arranged on the two-head fixing plate, and the two are combined with a devil felt. The ratchet buckle is fixed in combination with the hole at the end of the biceps femoral cushion. The ratchet rack is fixed in combination with the holes of the two-head fixing plate. The ratchet rack and the ratchet buckle are respectively fixed on two different entities, and the appropriate tightness can be adjusted according to the individual body shape by inserting the ratchet rack into the ratchet buckle. In order to enable the device to achieve the due conduction and effectThe tightness of all adjustable sizes is based on personal comfort, the tighter the better.
本發明一實施例的感測器單元包括一位置感測器、一六軸慣性測量單元、一扭力感測器。所述位置感測器設置於腰部輸出板,測量人體上身與下身之角度,將其角度經由IC轉換數位訊號發送至控制器單元。所述六軸慣性測量單元設置於背部人字骨機構組,預測人體姿態,將其姿態經由IC轉換數位訊號發送至控制器單元。所述扭力感測器設置於腰部輸出板,測量之訊號發送至控制單元。The sensor unit of an embodiment of the present invention includes a position sensor, a six-axis inertial measurement unit, and a torque sensor. The position sensor is arranged on the waist output board, measures the angle between the upper body and the lower body of the human body, and sends the digital signal to the controller unit through the IC conversion. The six-axis inertial measurement unit is arranged on the back herringbone mechanism group, predicts the posture of the human body, and sends its posture to the controller unit through the IC-converted digital signal. The torque sensor is arranged on the waist output board, and the measured signal is sent to the control unit.
本發明一實施例的電路控制單元包括一控制器單元、一馬達驅動器、一微電腦、一螢幕顯示器。所述控制器單元接收所有感測器的訊號,且由演算法運算,再發送命令至馬達驅動器並驅動外骨骼搬運輔助裝置。所述微電腦與控制器單元連接,可將控制單元收到的感測器單元相關訊號經由微電腦輸出至螢幕顯示器。The circuit control unit of an embodiment of the present invention includes a controller unit, a motor driver, a microcomputer, and a screen display. The controller unit receives the signals of all the sensors, performs arithmetic operations, and then sends commands to the motor driver to drive the exoskeleton carrying assistance device. The microcomputer is connected with the controller unit, and can output the relevant signals of the sensor unit received by the control unit to the screen display through the microcomputer.
為充分瞭解本發明之目的、特徵及功效,茲藉由下述具體之實施例,並配合所附之圖式,對本發明做一詳細說明綜上所述,說明如後,請參考圖1至圖9。In order to fully understand the purpose, features and effects of the present invention, the present invention is described in detail by the following specific embodiments and the accompanying drawings. Figure 9.
本發明之外骨骼搬運輔助裝置100,如圖1所示,係包含:致動器組11、髖部旋轉關節組12、左側大腿活動連桿組13、右側大腿活動連桿組14、腰部支撐機構組15、背部人字骨機構組16、肩部支撐機構組17、人體包覆材料18、感測器單元19及電路控制單元20。As shown in FIG. 1 , the exoskeleton transport
本發明之致動器組11,係包括:無刷直流馬達111、馬達固定法蘭外殼112、減速機113、輸出法蘭外殼114,其相對位置與其配合如圖2所示。The
如圖3所示,本發明之髖部旋轉關節組12,係包括:髖部轉接塊121、髖部連接塊122、髖部旋轉軸123、軸承124。所述髖部連接塊121以螺絲鎖固的方式固定於馬達固定法蘭外殼112。所述髖部轉接塊121內部與髖部連接塊122內部各設有軸承124,兩者以一髖部旋轉軸123插入兩者軸承124內連接,並提供人體額狀軸之自由度,符合人體工學之人體前彎後仰及人體行走之動作。As shown in FIG. 3 , the hip rotating
如圖4a,4b,與4c所示,本發明之左側大腿活動連桿組13與右側大腿活動連桿組14彼此為鏡射的組件,因此僅闡述左側大腿活動連桿組13。所述左側大腿活動連桿組13,係包括:大腿連桿131、大腿連桿轉接塊132、大腿旋轉軸133、第一連桿134、第二連桿135、第二連桿轉接塊136、股二頭轉接塊137、股二頭固定板138、軸承139。所述大腿旋轉軸133一詞用於旋轉連接處,且提供相對旋轉自由度。所述大腿連桿131與上述髖部連接塊122之另一側內部各設有一軸承,兩者連接方式以一大腿旋轉軸133插入兩者軸承139內提供人體矢狀軸之自由度,符合人體工學之腿部側向活動。所述大腿連桿轉接塊132與大腿連桿131以螺絲鎖固方式固定,且大腿連桿轉接塊132之一側內部設有一軸承139。所述第一連桿134內部設有一大腿旋轉軸133以螺絲鎖固方式固定,且此處大腿旋轉軸133插入大腿連桿轉接塊132內部軸承139。所述第二連桿135與第一連桿134之另一側以螺絲鎖固方式固定。所述第二連桿轉接塊136內部設有一軸承139與第二連桿135另一側以一大腿旋轉軸133連接,且第二連桿135與大腿旋轉軸133以螺絲鎖固方式固定。所述股二頭轉接塊137與第二連桿轉接塊136內部各設有一軸承139,且兩者以一大腿旋轉軸133連接。所述股二頭固定板138與股二頭轉接塊137以螺絲鎖固方式固定。As shown in Figures 4a, 4b, and 4c, the left thigh movable link set 13 and the right thigh movable link set 14 of the present invention are mirrored components, so only the left thigh movable link set 13 is described. The left thigh
如圖5所示,本發明之腰部支撐機構組15,係包括:工學腰帶181、腰帶結合板152、腰部支撐板153、腰部連接板154、腰部輸出板155、腰部肋板156。所述工學腰帶181以鉚接方式固定於腰帶結合板152,工學腰帶181附有調節機制,根據個人身形調整適當的尺寸。所述腰部支撐板153與工學腰帶181以螺絲鎖固的方式固定,其中腰帶結合板152夾於二者中。所述腰部連接板154與腰部支撐板153以螺絲鎖固的方式,鎖固於腰部支撐板153的兩側。所述腰部輸出板155一側與致動器組11的輸出法蘭外殼114以螺絲鎖固的方式固定,且另一側與腰部連接板154以螺絲鎖固的方式固定。所述腰部肋板156與腰部支撐板153、腰部輸出板155以螺絲鎖固的方式固定。As shown in FIG. 5 , the lumbar
如圖6所示,本發明之背部人字骨機構組16,係包括:氮氣缸基座161、第一節氮氣缸162a、第二節氮氣缸162b、第三節氮氣缸162c、氮氣缸旋轉座163、螺絲轉軸164、氮氣缸轉接塊165、第一節人字骨結構件166、第二節人字骨結構件167、第三節人字骨結構件168。所述氮氣缸基座161分別以螺絲鎖固的方式固定於腰部支撐板153、第二節人字骨結構件167以及第三節人字骨機構件168之左右兩側。所述第一節氮氣缸162a一側與氮氣缸基座161以螺絲轉軸164插入二者並固定於腰部支撐板153,且第一節氮氣缸162a另一側與氮氣缸旋轉座163以螺絲轉軸164插入二者固定。所述氮氣缸旋轉座163以螺絲鎖固方式固定於第一節人字骨結構件166之左右兩側位置。所述氮氣缸轉接塊165以螺絲鎖固方式固定於第一節人字骨結構件166和第二節人字骨結構件167之中間位置之中間位置。所述第二節氮氣缸162b一側與氮氣缸轉接塊165以螺絲轉軸164插入二者並固定於第一節人字骨結構件167,且第二節氮氣缸162b另一側與氮氣缸基座161以螺絲轉軸164插入二者並固定於第二節人字骨結構件167之左右兩側位置。所述第三節氮氣缸162c一側與氮氣缸轉接塊165以螺絲轉軸164插入二者並固定於第三節人字骨結構件168,且第三節氮氣缸162c另一側與氮氣缸基座161以螺絲轉軸164插入二者並固定於第二節人字骨之左右兩側位置。As shown in FIG. 6, the back herringbone mechanism set 16 of the present invention includes: a
如圖7所示,本發明之肩部支撐機構組17,係包括:調整滑塊171、拉伸彈簧172、拉伸彈簧螺柱173、背部固定板174、工學背心182、肩部轉接板176、活動鉸鍊177、肩部活動板178、棘齒條184。所述調整滑塊171以螺絲鎖固的方式固定於第三節人字骨結構件168,第三節人字骨結構件168中之調節孔位依據個人身形調整。所述拉伸彈簧螺柱173鎖固於調整滑塊171之兩側,且末端鉤環與拉伸彈簧172結合。所述背部固定板174以鉚接方式與工學背心182結合,且背部固定板174之正面設有鉤環與拉伸彈簧172結合。所述肩部轉接板176一側以螺絲鎖固方式固定於第三節人字骨結構件168。所述活動鉸鍊177以螺絲鎖固方式固定於肩部轉接板176與肩部活動板178。所述肩部活動板178末端設有一孔位以螺絲鎖固方式與棘齒條184結合。As shown in FIG. 7 , the shoulder support mechanism set 17 of the present invention includes: an
請參考圖1,圖4c,圖5,圖7,本發明之人體包覆材料18,係包括:工學腰帶181、工學背心182、股二頭軟墊183、棘齒條184、棘齒扣185。其人體包覆材料18分別與整體裝置之多處零件結合,其結合方式由下方說明。所述工學腰帶181以鉚接方式固定於腰帶結合板152,工學腰帶181附有調節機制,根據個人身形調整適當的尺寸。所述工學背心182以鉚接方式與背部固定板174結合。所述股二頭軟墊183設於股二頭固定板138,二者以魔鬼氈結合。所述棘齒扣185與股二頭軟墊183末端孔位結合固定。所述棘齒條184與股二頭固定板138之孔位結合固定。所述棘齒條184與棘齒扣185分別固定於二者不同的實體上,將棘齒條184插入棘齒扣185可依據個人身形調整適當的鬆緊度。為了讓裝置能夠達到應有的傳導力以及效益,所有人體包覆材料18皆為可調尺寸,其鬆緊度依個人舒適為主調整越緊越佳。Please refer to FIG. 1 , FIG. 4 c , FIG. 5 , and FIG. 7 . The human
如圖8a,圖8b,圖8c所示,本發明之感測器單元19,係包括:位置感測器191、六軸慣性測量單元192、扭力感測器193。所述位置感測器191設置於腰部輸出板155,測量人體上身與下身之角度,將其角度經由IC轉換數位訊號發送至控制器單元201。所述六軸慣性測量單元192設置於背部人字骨機構組16,預測人體姿態,將其姿態經由IC轉換數位訊號發送至控制器單元201。所述扭力感測器193設置於腰部輸出板155,測量之訊號發送至控制單元201。進一步,可以在使用者的上肢或下肢穿戴表面肌電圖感測器或感測陣列,可用來偵測使用上肢或下肢於進行搬運物品或重物時,肌肉出力的意向或意圖,並可以回饋給控制單元201。As shown in FIGS. 8 a , 8 b and 8 c , the
如圖9所示,本發明之電路控制單元20,係包括:控制器單元201、馬達驅動器202、微電腦203、螢幕顯示器204。所述控制器單元201接收所有感測器單元19之訊號,且由演算法運算,再發送命令至馬達驅動器202並驅動外骨骼搬運輔助裝置10。所述微電腦203與控制器單元201連接,可將控制器單元201收到的感測器單元19相關訊號經由微電腦203輸出至螢幕顯示器204。As shown in FIG. 9 , the
雖然本發明之外骨骼運動輔助裝置揭露如上,然其並非用以限定本發明,任何所屬技術領域中具有通常知識者,在不脫離本發明的精神和範圍內,當可作些許的更動與潤飾,故本發明的保護範圍當視後附的申請專利範圍所界定者為準。Although the exoskeleton movement assisting device of the present invention is disclosed as above, it is not intended to limit the present invention. Anyone with ordinary knowledge in the technical field can make some changes and modifications without departing from the spirit and scope of the present invention. Therefore, the protection scope of the present invention shall be determined by the scope of the appended patent application.
100:外骨骼搬運輔助裝置100: Exoskeleton Handling Aids
11:致動器組11: Actuator group
12:髖部旋轉關節組12: Hip Rotation Joint Set
13:左側大腿活動連桿組13: Left thigh active link group
14:右側大腿活動連桿組14: Right thigh active link group
15:腰部支撐機構組15: Lumbar support mechanism group
16:背部人字骨機構組16: Back Herringbone Mechanism Group
17:肩部支撐機構組17: Shoulder support mechanism group
18:人體包覆材料18: Body wrapping material
19:感測器單元19: Sensor unit
20:電路控制單元20: Circuit control unit
Claims (13)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| TW109128028ATW202208130A (en) | 2020-08-18 | 2020-08-18 | Exoskeleton load handling device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| TW109128028ATW202208130A (en) | 2020-08-18 | 2020-08-18 | Exoskeleton load handling device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| TW202208130Atrue TW202208130A (en) | 2022-03-01 |
Family
ID=81747116
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| TW109128028ATW202208130A (en) | 2020-08-18 | 2020-08-18 | Exoskeleton load handling device |
Country Status (1)
| Country | Link |
|---|---|
| TW (1) | TW202208130A (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI866703B (en)* | 2023-12-18 | 2024-12-11 | 鑽全實業股份有限公司 | Wearable lumbar exoskeleton assistive device |
| TWI870164B (en)* | 2023-12-18 | 2025-01-11 | 鑽全實業股份有限公司 | Exoskeleton assistive device that combines passive support with active augmentation |
| TWI871127B (en)* | 2023-12-05 | 2025-01-21 | 國家中山科學研究院 | Waist Exoskeleton |
- 2020
- 2020-08-18TWTW109128028Apatent/TW202208130A/enunknown
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWI871127B (en)* | 2023-12-05 | 2025-01-21 | 國家中山科學研究院 | Waist Exoskeleton |
| TWI866703B (en)* | 2023-12-18 | 2024-12-11 | 鑽全實業股份有限公司 | Wearable lumbar exoskeleton assistive device |
| TWI870164B (en)* | 2023-12-18 | 2025-01-11 | 鑽全實業股份有限公司 | Exoskeleton assistive device that combines passive support with active augmentation |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12076289B2 (en) | Hip exoskeleton | |
| Sarkisian et al. | Self-aligning mechanism improves comfort and performance with a powered knee exoskeleton | |
| Zhang et al. | Design and experimental verification of hip exoskeleton with balance capacities for walking assistance | |
| Lee et al. | Biomechanical design of a novel flexible exoskeleton for lower extremities | |
| Low | Robot-assisted gait rehabilitation: From exoskeletons to gait systems | |
| EP3233014B1 (en) | A single point load/torque adjusting mechanical assembly | |
| JP2023011926A (en) | exercise aid | |
| Saccares et al. | iT-Knee: An exoskeleton with ideal torque transmission interface for ergonomic power augmentation | |
| US20060069336A1 (en) | Ankle interface | |
| Simpson et al. | Exomuscle: An inflatable device for shoulder abduction support | |
| TW202208130A (en) | Exoskeleton load handling device | |
| Park et al. | Shoulder-sidewinder (shoulder-side wearable industrial ergonomic robot): Design and evaluation of shoulder wearable robot with mechanisms to compensate for joint misalignment | |
| US12419801B2 (en) | Self-aligning mechanisms in passive and powered exoskeletons | |
| CN114746050A (en) | System for guiding movement of a target joint | |
| Zimmermann et al. | Human–robot attachment system for exoskeletons: Design and performance analysis | |
| Zhang et al. | A spring-loaded compliant neck brace with adjustable supports | |
| Hsieh et al. | Single‐Actuator‐Based Lower‐Limb Soft Exoskeleton for Preswing Gait Assistance | |
| Jiang et al. | Recent advances on lower limb exoskeleton rehabilitation robot | |
| CN114848390B (en) | A lasso-driven recumbent lower limb rehabilitation robot | |
| Nakamura et al. | Realizing model-based wearable antigravity muscles support with dynamics terms | |
| Xu et al. | Reducing migration of knee exoskeletons with dynamic waist strap | |
| Georgarakis et al. | Supporting and stabilizing the scapulohumeral rhythm with a body-or robot-powered orthosis | |
| Huang et al. | Hybrid control of the Berkeley lower extremity exoskeleton (BLEEX) | |
| Berkelman et al. | Passive orthosis linkage for locomotor rehabilitation | |
| Hojjati Najafabadi et al. | Mechanical design and simulation of a saddle-assistive device for sit-to-stand transfer in healthy subjects |