TW202206783A - Mems sensing system - Google Patents
Mems sensing systemDownload PDFInfo
- Publication number
- TW202206783A TW202206783ATW110114413ATW110114413ATW202206783ATW 202206783 ATW202206783 ATW 202206783ATW 110114413 ATW110114413 ATW 110114413ATW 110114413 ATW110114413 ATW 110114413ATW 202206783 ATW202206783 ATW 202206783A
- Authority
- TW
- Taiwan
- Prior art keywords
- sensing system
- event
- body part
- mems
- wearable sensing
- Prior art date
Links
- 230000033001locomotionEffects0.000claimsabstractdescription42
- 230000003595spectral effectEffects0.000claimsabstractdescription41
- 230000000694effectsEffects0.000claimsabstractdescription10
- 239000000758substrateSubstances0.000claimsdescription20
- 238000005259measurementMethods0.000claimsdescription15
- 230000003993interactionEffects0.000claimsdescription6
- 210000000707wristAnatomy0.000claimsdescription3
- 238000000034methodMethods0.000description43
- 238000001228spectrumMethods0.000description10
- 230000000875corresponding effectEffects0.000description8
- 238000005070samplingMethods0.000description8
- 230000002123temporal effectEffects0.000description8
- 230000010354integrationEffects0.000description7
- 230000008569processEffects0.000description7
- 239000004020conductorSubstances0.000description5
- 238000010801machine learningMethods0.000description3
- 210000003205muscleAnatomy0.000description3
- 230000004044responseEffects0.000description3
- 241001465754MetazoaSpecies0.000description2
- 230000005540biological transmissionEffects0.000description2
- 230000008859changeEffects0.000description2
- 238000010586diagramMethods0.000description2
- 239000000284extractSubstances0.000description2
- 238000004519manufacturing processMethods0.000description2
- 239000000463materialSubstances0.000description2
- 230000000737periodic effectEffects0.000description2
- 239000007787solidSubstances0.000description2
- 239000000126substanceSubstances0.000description2
- 230000001133accelerationEffects0.000description1
- 238000004458analytical methodMethods0.000description1
- 210000003423ankleAnatomy0.000description1
- 238000003491arrayMethods0.000description1
- 238000012512characterization methodMethods0.000description1
- 238000013527convolutional neural networkMethods0.000description1
- 230000002596correlated effectEffects0.000description1
- 230000003247decreasing effectEffects0.000description1
- 238000000605extractionMethods0.000description1
- 238000001914filtrationMethods0.000description1
- 230000006870functionEffects0.000description1
- 239000007789gasSubstances0.000description1
- 230000005484gravityEffects0.000description1
- 230000002085persistent effectEffects0.000description1
- 238000010079rubber tappingMethods0.000description1
- 239000013589supplementSubstances0.000description1
- 210000001519tissueAnatomy0.000description1
- 230000001960triggered effectEffects0.000description1
- 238000009423ventilationMethods0.000description1
- XLYOFNOQVPJJNP-UHFFFAOYSA-NwaterSubstancesOXLYOFNOQVPJJNP-UHFFFAOYSA-N0.000description1
Images








Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01H—MEASUREMENT OF MECHANICAL VIBRATIONS OR ULTRASONIC, SONIC OR INFRASONIC WAVES
- G01H1/00—Measuring characteristics of vibrations in solids by using direct conduction to the detector
- G—PHYSICS
- G01—MEASURING; TESTING
- G01H—MEASUREMENT OF MECHANICAL VIBRATIONS OR ULTRASONIC, SONIC OR INFRASONIC WAVES
- G01H11/00—Measuring mechanical vibrations or ultrasonic, sonic or infrasonic waves by detecting changes in electric or magnetic properties
- G01H11/06—Measuring mechanical vibrations or ultrasonic, sonic or infrasonic waves by detecting changes in electric or magnetic properties by electric means
- G—PHYSICS
- G01—MEASURING; TESTING
- G01H—MEASUREMENT OF MECHANICAL VIBRATIONS OR ULTRASONIC, SONIC OR INFRASONIC WAVES
- G01H3/00—Measuring characteristics of vibrations by using a detector in a fluid
- G01H3/04—Frequency
- G01H3/08—Analysing frequencies present in complex vibrations, e.g. comparing harmonics present
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Measurement Of The Respiration, Hearing Ability, Form, And Blood Characteristics Of Living Organisms (AREA)
- User Interface Of Digital Computer (AREA)
Abstract
Description
Translated fromChinese所揭示之設備及方法與感測器之領域相關,特定言之,所揭示之設備及方法與透過運動及位置之機械波感測來操作之姿勢及人類互動感測器有關。The disclosed apparatus and methods are related to the field of sensors, and in particular, the disclosed apparatus and methods are related to gesture and human interaction sensors that operate through mechanical wave sensing of motion and position.
當前揭示之系統及方法涉及相關於且用於設計、製造及使用實施機械波信號之感測器之原理。機械波信號由本身能夠傳輸及接收信號或結合實施及傳輸其他類型之信號或使用其他類型之感測模態之其他裝置來發揮作用之裝置使用。機械信號意謂經由透過諸如氣體及固體之一媒介來傳輸波所產生之信號。如本文中所使用,術語「固體」涵蓋人體及所有相關聯組織。在一實施例中,機械波信號可另外指稱一聲波。The presently disclosed systems and methods relate to principles related to and for the design, manufacture, and use of sensors implementing mechanical wave signals. Mechanical wave signals are used by devices capable of transmitting and receiving signals themselves or functioning in conjunction with other devices that implement and transmit other types of signals or use other types of sensing modalities. A mechanical signal means a signal produced by transmitting waves through media such as gases and solids. As used herein, the term "solid" encompasses the human body and all associated tissues. In one embodiment, the mechanical wave signal may otherwise be referred to as an acoustic wave.
在整個本發明中,術語「事件」可用於描述其中偵測及判定身體之肌肉活動及/或位置之時段。根據一實施例,事件可以非常低延時(例如約10毫秒或更小或約小於1毫秒)偵測、處理及/或供應至下游運算程序。Throughout this disclosure, the term "event" may be used to describe a period of time during which muscle activity and/or position of the body is detected and determined. According to one embodiment, events can be detected, processed and/or supplied to downstream computing processes with very low latency (eg, about 10 milliseconds or less or about 1 millisecond).
如本文中及尤其申請專利範圍內所使用,諸如第一及第二之序數術語本身不意欲暗示序列、時間或唯一性,而是用於使主張建構彼此區分。在其中內文指示之使用中,此等術語可暗示第一及第二係唯一的。例如,當一事件發生於一第一時間且另一事件發生於一第二時間時,不意欲暗示第一時間發生於第二時間之前、發生於第二時間之後或與第二時間同時發生。然而,當請求項中呈現第二時間在第一時間之後的進一步限制時,內文將需要將第一時間及第二時間解讀為唯一時間。類似地,當內文如此指示或容許時,序數術語意欲被廣義解釋,使得兩個識別主張建構可具有相同特性或不同特性。因此,例如,在無進一步限制之情況下,一第一頻率及一第二頻率可為相同頻率(例如第一頻率係10 Mhz且第二頻率係10 Mhz)或可為不同頻率(例如第一頻率係10 Mhz且第二頻率係11 Mhz)。內文可另有指示(例如)一第一頻率及一第二頻率進一步受限於彼此頻率正交,在該情況中,其等可不為相同頻率。As used herein and particularly within the scope of the claims, ordinal terms such as first and second are not intended by themselves to imply sequence, timing, or uniqueness, but are used to distinguish claiming constructs from one another. In their use where context dictates, these terms may imply that first and second are unique. For example, when an event occurs at a first time and another event occurs at a second time, it is not intended to imply that the first time occurred before the second time, occurred after the second time, or occurred simultaneously with the second time. However, when a further restriction that the second time is after the first time is presented in the request term, the context will need to interpret the first time and the second time as unique times. Similarly, when the context so dictates or permits, ordinal terms are intended to be construed broadly such that two identifying claim constructs may have the same characteristics or different characteristics. Thus, for example, without further limitation, a first frequency and a second frequency may be the same frequency (eg, the first frequency is 10 Mhz and the second frequency is 10 Mhz) or may be different frequencies (eg, the first frequency is 10 Mhz) The frequency is 10 Mhz and the second frequency is 11 Mhz). The context may otherwise indicate, for example, that a first frequency and a second frequency are further constrained to be frequency orthogonal to each other, in which case they may not be the same frequency.
本文中所描述之系統使用機械波來判定運動及位置。在一實施例中,機械波係聲波。在一實施例中,本文中所描述之系統感測一個人之身體部分之運動及位置。在一實施例中,本文中所描述之系統感測一個人之手之運動及位置。在一實施例中,本文中所描述之系統感測一個人之手指之運動及位置。在一實施例中,本文中所描述之系統感測一個人之腿之運動及位置。在一實施例中,本文中所描述之系統感測一個人之手臂之運動及位置。在一實施例中,本文中所描述之系統感測一個人之頭部之運動及位置。在一實施例中,本文中所描述之系統感測一個人相對於另一個人之位置。在一實施例中,本文中所描述之系統感測一個人相對於一裝置或一物體之運動。The systems described herein use mechanical waves to determine motion and position. In one embodiment, the mechanical waves are acoustic waves. In one embodiment, the system described herein senses the movement and position of a person's body parts. In one embodiment, the system described herein senses the movement and position of a person's hand. In one embodiment, the system described herein senses the movement and position of a person's fingers. In one embodiment, the system described herein senses the movement and position of a person's legs. In one embodiment, the system described herein senses the movement and position of a person's arm. In one embodiment, the system described herein senses the movement and position of a person's head. In one embodiment, the system described herein senses the position of one person relative to another. In one embodiment, the system described herein senses the movement of a person relative to a device or an object.
本發明之實施例實施使用MEMS (微機電系統)感測器(即,MEMS麥克風、MEMS加速度計、MEMS迴轉儀)之感測系統。MEMS麥克風係將聲壓波轉換成電信號之傳感器。類似地,MEMS加速度計量測加速度且MEMS迴轉儀量測相對於一參考點之定向。MEMS麥克風可配置成一陣列或放置於各種位置中,其取決於所要實施方案。另外,可使用一MEMS麥克風而非多個MEMS麥克風。Embodiments of the present invention implement sensing systems using MEMS (Micro Electro Mechanical Systems) sensors (ie, MEMS microphones, MEMS accelerometers, MEMS gyroscopes). MEMS microphones are sensors that convert sound pressure waves into electrical signals. Similarly, MEMS accelerometers measure acceleration and MEMS gyroscopes measure orientation relative to a reference point. MEMS microphones can be configured in an array or placed in various locations, depending on the desired implementation. Additionally, one MEMS microphone may be used instead of multiple MEMS microphones.
本申請案係2020年6月23日申請之美國專利申請案第16/909,608號之一部分接續案;美國專利申請案第16/909,608號主張2019年6月25申請之美國臨時申請案第62/866,206號之權利。本申請案係2020年6月24日申請之美國專利申請案第16/910,982號之一部分接續案;美國專利申請案第16/910,982號主張2019年6月25申請之美國臨時申請案第62/866,324號之權利。本申請案係2020年10月4日申請之美國專利申請案第17/062,608號之一部分接續案;美國專利申請案第17/062,608號主張2019年10月4申請之美國臨時申請案第62/910,528號之權利。本申請案係2020年6月26日申請之美國專利申請案第16/913,966號之一部分接續案;美國專利申請案第16/913,966號主張2019年6月26日申請之美國臨時申請案第62/866,970號之權利。本申請案係2020年6月26日申請之美國專利申請案第16/914,258號之一部分接續案;美國專利申請案第16/914,258號主張2019年6月26日申請之美國臨時申請案第62/867,006號之權利。本申請案主張2020年4月21日申請之美國臨時申請案第63/013,507號之權利。所有上述申請案之內容以引用的方式併入本文中。本申請案包含受著作權保護之材料。著作權所有人不反對專利及商標局的專利檔案或紀錄中出現之對專利揭示內容之任一者之摹本再生,但除此之外保留所有著作權權利。This application is a continuation-in-part of US Patent Application No. 16/909,608, filed on June 23, 2020; US Patent Application No. 16/909,608 claims US Provisional Application No. 62/62, filed on June 25, 2019 866,206 rights. This application is a continuation-in-part of US Patent Application No. 16/910,982, filed on June 24, 2020; US Patent Application No. 16/910,982 claims US Provisional Application No. 62/62, filed on June 25, 2019 866,324 rights. This application is a continuation-in-part of US Patent Application No. 17/062,608, filed on October 4, 2020; US Patent Application No. 17/062,608 claims US Provisional Application No. 62/10, filed on October 4, 2019 910,528 rights. This application is a continuation-in-part of US Patent Application No. 16/913,966, filed on June 26, 2020; US Patent Application No. 16/913,966 claims US Provisional Application No. 62, filed on June 26, 2019 /866,970 rights. This application is a continuation-in-part of US Patent Application No. 16/914,258, filed on June 26, 2020; US Patent Application No. 16/914,258 claims US Provisional Application No. 62, filed on June 26, 2019 /867,006 rights. This application claims the rights of US Provisional Application No. 63/013,507, filed on April 21, 2020. The contents of all of the above applications are incorporated herein by reference. This application contains material that is subject to copyright protection. The copyright owner has no objection to the facsimile reproduction of any of the patent disclosures as they appear in the Patent and Trademark Office patent files or records, but otherwise reserves all copyright rights.
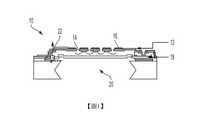
圖1中展示一MEMS麥克風10之一實例。MEMS麥克風具有固定於適當位置中之一板12。板12具有聲壓波可透過其進入之孔14。一電極16容許MEMS麥克風10可操作地連接至一系統。可移動之一導電板18定位成接近固定板12。一室20定位於導電板18下方。壓縮空氣透過一通風孔22離開。此MEMS麥克風10經調適以量測發生於環境中之振動。然而,應瞭解,圖1中所展示之MEMS麥克風僅供舉例且可代以使用其他類型之MEMS麥克風。其實,應瞭解,可使用經調適以接收機械波且將接收機械波轉變成電信號之任何裝置來取得量測波之結果且將其轉變成有意義資訊。An example of a
一MEMS感測器(即,麥克風、加速度計、迴轉儀)能夠取得透過各者介質所傳輸之機械波且將其轉換成電信號。電信號能夠經處理及使用以判定關於所量測之機械波之重要性之資訊。例如,使用一MEMS麥克風來判定存在聲波。在一實施例中,MEMS麥克風能夠量測聲波且判定如此量測之一聲波之特定頻率。在一實施例中,複數個MEMS麥克風可使用量測聲波且能夠使用經量測及處理之聲波來判定位置及運動。類似地,可使用MEMS加速度計及迴轉儀來判定存在機械波。其等亦可判定如此量測之機械波之特定頻率。在一實施例中,複數個MEMS感測器可使用量測機械波且能夠使用經量測及處理之機械波來判定位置及運動。在一實施例中,複數個MEMS加速度計可使用量測機械波且能夠使用經量測及處理之機械波來判定位置及運動。A MEMS sensor (ie, microphone, accelerometer, gyroscope) can take the mechanical waves transmitted through each medium and convert them into electrical signals. The electrical signals can be processed and used to determine information about the significance of the measured mechanical waves. For example, a MEMS microphone is used to determine the presence of sound waves. In one embodiment, the MEMS microphone is capable of measuring sound waves and determining the particular frequency of a sound wave so measured. In one embodiment, the plurality of MEMS microphones may use measured sound waves and can use the measured and processed sound waves to determine position and motion. Similarly, MEMS accelerometers and gyroscopes can be used to determine the presence of mechanical waves. They can also determine the specific frequency of the mechanical waves so measured. In one embodiment, the plurality of MEMS sensors can use the measured mechanical waves and can use the measured and processed mechanical waves to determine position and motion. In one embodiment, the plurality of MEMS accelerometers can use the measured mechanical waves and can use the measured and processed mechanical waves to determine position and motion.
轉至圖2,展示感測系統200。感測系統200係一機械波量測系統。在感測系統200中,一MEMS感測器202經調適以放置於一個體之身體上。MEMS感測器202可操作地附接至或連接至一基板201。在一實施例中,MEMS感測器202形成為基板201之部分。在一實施例中,MEMS感測器202及基板201之至少一者形成一穿戴式機械封閉體之部分。Turning to FIG. 2, a
基板201可形成由一使用者穿戴之一穿戴式裝置之部分。MEMS感測器202能夠量測透過空氣所傳輸之機械波。另外,MEMS感測器202能夠量測經由使用者之身體所傳輸之機械波。例如,MEMS感測器202能夠偵測經由一使用者之皮層所傳輸之機械波之存在。在一實施例中,MEMS感測器量測透過一使用者之皮層所傳輸之機械波。在一實施例中,MEMS感測器量測透過使用者之身體所傳輸之機械波。在一實施例中,MEMS感測器量測透過空氣所傳輸之機械波。在一實施例中,MEMS感測器量測透過皮層及一使用者身體之及內部所傳輸之機械波。在一實施例中,MEMS感測器量測透過皮層、一使用者身體之內部及空氣所傳輸之機械波。在一實施例中,MEMS感測器量測透過一穿戴式機械封閉體所傳輸之機械波。在一實施例中,MEMS感測器量測經由一穿戴式機械封閉體所傳輸之機械波。在一實施例中,機械波係聲波。
在一實施例中,由一使用者之手之移動產生之機械波能夠由MEMS感測器量測。在一實施例中,由MEMS感測器量測由一使用者之手指與使用者之另一手指接觸所產生機械波。在一實施例中,由MEMS感測器量測由手指與手之部分接觸所產生之機械波。在一實施例中,由MEMS感測器量測由手指與物體接觸所產生之機械波。在一實施例中,由MEMS感測器量測由手之部分與手之其他部分接觸所產生之機械波。在一實施例中,由MEMS感測器量測由物體與手之部分接觸所產生之機械波。在一實施例中,由MEMS感測器量測由一手與另一手接觸所產生之機械波。在一實施例中,由MEMS感測器量測由一身體之部分與其他身體部分或其他物體接觸所產生之機械波。In one embodiment, the mechanical waves generated by the movement of a user's hand can be measured by a MEMS sensor. In one embodiment, the mechanical waves generated by the contact of a user's finger with another user's finger are measured by a MEMS sensor. In one embodiment, the mechanical waves generated by the partial contact of the finger with the hand are measured by the MEMS sensor. In one embodiment, the mechanical waves generated by the contact of the finger with the object are measured by the MEMS sensor. In one embodiment, the mechanical waves generated by the contact of the part of the hand with the rest of the hand are measured by the MEMS sensor. In one embodiment, the mechanical waves generated by the partial contact of the object with the hand are measured by the MEMS sensor. In one embodiment, the mechanical waves generated by the contact of one hand with the other are measured by a MEMS sensor. In one embodiment, mechanical waves generated by the contact of one body part with other body parts or other objects are measured by MEMS sensors.
MEMS感測器202可操作地連接至一處理器203。處理器203可經調適以處理且連接至能夠量測及判定運動及位置之不同方面之複數個不同感測模態。在一實施例中,MEMS感測器使用一個以上感測模態來發揮作用,諸如(例如)使用傳輸及接收複數個頻率正交信號且使用接收信號來進一步提供一使用者之手之位置及移動之傳輸天線及接收天線。The
轉至圖3,展示感測系統300。感測系統300具有一MEMS感測器302(a)。在一實施例中,MEMS感測器302(a)係複數個MEMS感測器302中之一MEMS感測器。在圖3中,展示三個MEMS感測器302(a)至302(c)。MEMS感測器302(a)至302(c)之各者可經調適以量測來自一使用者之手或身體部分之活動之一機械波。可相對於MEMS感測器302(a)至302(c)之各者量測來自一使用者之各種活動之機械波。由MEMS感測器302(a)至302(c)之各者作出之量測可經組合及相關以提供一使用者之身體部分之移動及活動之一更全面圖像。一處理器303處理量測且使用量測來提供與一使用者之手之運動及位置相關之資訊。Turning to FIG. 3, a
機械波之量測可用於三角測量位置及確定自機械波外推之移動之各種品質。因為可量測各種身體部分之間的接觸之機械波,所以可使用機械波之性質來判定活動之強度。例如,一拍手之機械波將具有不同於一按扣之機械波之量測性質之量測性質。Measurement of mechanical waves can be used to triangulate positions and determine various qualities of motion extrapolated from mechanical waves. Because mechanical waves of contact between various body parts can be measured, the properties of mechanical waves can be used to determine the intensity of activity. For example, the mechanical wave of a clap will have different measurement properties than that of a snap button.
另外,機器學習可應用於資料以能夠基於所接收之機械波之量測性質來辨別不同活動。藉由將機器學習應用於由一使用者執行之各種位置及活動,系統判定位置及活動之能力能夠變得更精妙。Additionally, machine learning can be applied to the data to be able to discern different activities based on the measured properties of the received mechanical waves. By applying machine learning to various locations and activities performed by a user, the system's ability to determine locations and activities can be refined.
圖3繪示具有三個MEMS感測器之一感測系統300,然而,可使用額外數目個MEMS感測器及諸多MEMS感測器之不同陣列。在一實施例中,四個MEMS感測器之一陣列定位成四邊形陣型。在一實施例中,四個MEMS感測器之一陣列沿一圓形之圓周定位。在一實施例中,五個MEMS感測器之一陣列定位成五邊形陣型。在一實施例中,五個MEMS感測器之一陣列沿一圓形之圓周定位。在一實施例中,六個MEMS感測器之一陣列定位成六邊形陣型。在一實施例中,六個MEMS感測器之一陣列沿一圓形之圓周定位。應瞭解,更大數目個MEMS感測器可被使用且配置成各種構形且不受限於本文中所揭示之實施例。此外,在一些實施例中,MEMS感測器可依可不形成一特定圖案而是可基於MEMS感測器實施於其上之裝置或穿戴式裝置來判定之預定配置使用。例如,若實施於一手套中,則一MEMS感測器可放置於一手套之各手指部分之手指區域內。Figure 3 shows a
在一實施例中,MEMS感測器沿形成或放置於由一個體使用之一穿戴式裝置中或該穿戴式裝置上之一圓形之一圓周定位。在一實施例中,MEMS感測器放置於放置於手腕區域中之一穿戴式裝置上或該穿戴式裝置中。在一實施例中,MEMS感測器放置於穿戴於腳踝區域中之一穿戴式裝置上或該穿戴式裝置中。在一實施例中,MEMS感測器放置於圍繞頸部穿戴之一穿戴式裝置上或該穿戴式裝置中。在一實施例中,MEMS感測器放置於圍繞胸部穿戴之一穿戴式裝置上或該穿戴式裝置中。在一實施例中,MEMS感測器放置於圍繞腰部穿戴之一穿戴式裝置上或該穿戴式裝置中。在一實施例中,MEMS感測器放置於圍繞一手臂穿戴之一穿戴式裝置上或該穿戴式裝置中。在一實施例中,MEMS感測器放置於圍繞頭部穿戴之一穿戴式裝置上或該穿戴式裝置中。In one embodiment, the MEMS sensor is positioned along a circumference of a circle formed or placed in or on a wearable device used by a subject. In one embodiment, the MEMS sensor is placed on or in a wearable device placed in the wrist region. In one embodiment, the MEMS sensor is placed on or in a wearable device worn in the ankle region. In one embodiment, the MEMS sensor is placed on or in a wearable device worn around the neck. In one embodiment, the MEMS sensor is placed on or in a wearable device that is worn around the chest. In one embodiment, the MEMS sensor is placed on or in a wearable device that is worn around the waist. In one embodiment, the MEMS sensor is placed on or in a wearable device worn around an arm. In one embodiment, the MEMS sensor is placed on or in a wearable device that is worn around the head.
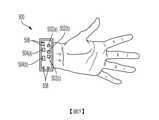
轉至圖4,展示感測系統400之一實施例。感測系統400具有放置於定位於一使用者之身體上之一基板401上之複數個MEMS感測器402(a)至402(d)。在一實施例中,MEMS感測器402(a)至402(d)係MEMS麥克風。在一實施例中,MEMS感測器402(a)至402(d)係MEMS加速度計。在一實施例中,MEMS感測器402(a)至402(d)係MEMS迴轉儀。在一實施例中,MEMS感測器402(a)至402(d)係MEMS壓力感測器。在一實施例中,MEMS感測器402(a)至402(d)係MEMS慣性量測感測器。在一實施例中,MEMS感測器402(a)至402(d)係MEMS超音波傳感器。Turning to FIG. 4, one embodiment of a
另外,一或多個機械波傳輸器404(a)至404(b)可放置於基板401上。機械波傳輸器404(a)至404(b)能夠產生可具有可識別頻率之機械波。在一實施例中,一機械波可透過至少一介質來傳播。如本文中所使用,術語「介質」用於指示能夠中介機械波之傳播之任何物質。Additionally, one or more mechanical wave transmitters 404(a)-404(b) may be placed on the
在一實施例中,一機械波傳輸器係能夠產生可具有可識別頻率之聲波之一聲傳輸器。作為一非限制性實例,一聲傳輸器係一音揚聲器。在一實施例中,一機械波傳輸器係能夠產生機械波之一觸覺產生器。在一實施例中,觸覺產生器產生可具有可識別頻率之機械波。在一實施例中,一觸覺產生器係具有用於產生機械波之一偏心質量之一電動馬達。在一實施例中,一觸覺產生器係能夠將力、振動及運動之至少一者應用於一材料及物質之至少一者之一裝置。In one embodiment, a mechanical wave transmitter is an acoustic transmitter capable of producing acoustic waves that can have identifiable frequencies. As a non-limiting example, the sonic transmitter is a sonic speaker. In one embodiment, a mechanical wave transmitter is a haptic generator capable of generating mechanical waves. In one embodiment, the haptic generator generates mechanical waves that may have identifiable frequencies. In one embodiment, a haptic generator has an electric motor with an eccentric mass for generating mechanical waves. In one embodiment, a haptic generator is a device capable of applying at least one of force, vibration, and motion to at least one of a material and a substance.
在一實施例中,一機械波傳輸器係一人之一身體部分。在一實施例中,一機械波傳輸器係一動物之一身體部分。熟習技術者應瞭解,儘管圖4繪示展示可放置於基板401上之機械波傳輸器404(a)至404(b)之一非限制性實施例,但在其中機械波傳輸器係一身體部分之一實施例中,機械波傳輸器不定位於基板401上。在一實施例中,當存在身體部分或身體之任何其他部分之移動時,一人或動物之一身體部分係一機械波傳輸器。作為一非限制性實例,當人實現手臂及手之運動以(例如)輕拍一表面或用兩個手指捏持時,包含手之人手臂係一機械波傳輸器。熟習技術者應注意,人體之任何給定部分之移動及運動係無限的,因此,任何移動或運動可傳輸待偵測之機械波。熟習技術者亦應注意,人體針對身體之個別部分在不同頻率處諧振。在一實施例中,機械波傳輸器位於不同於MEMS感測器之身體部分中。在一實施例中,機械波傳輸器位於相同於MEMS感測器之身體部分中。In one embodiment, a mechanical wave transmitter is a body part of a person. In one embodiment, a mechanical wave transmitter is a body part of an animal. Those skilled in the art will appreciate that although FIG. 4 depicts a non-limiting embodiment showing mechanical wave transmitters 404(a)-404(b) that may be placed on
在一實施例中,機械波在聽力範疇(一般視為20 Hz至20 kHz)外之一頻率範圍內傳輸。在一實施例中,機械波在低於20 Hz之一頻率範圍內傳輸。在一實施例中,機械波在高於20 kHz之一頻率範圍內傳輸。在一實施例中,機械波在低於20 Hz且高於20 kHz之一頻率範圍內傳輸。在一實施例中,機械波在涵蓋聽力範圍之部分之一頻率範圍內傳輸。在一實施例中,機械波在1 Hz至100 kHZ之間的一頻率範圍內傳輸。在一實施例中,機械波透過空氣來傳輸。在一實施例中,機械波透過皮膚來傳輸。在一實施例中,機械波透過身體內部來傳輸。在一實施例中,機械波傳輸器透過水來傳輸機械波。熟習技術者應注意,機械波傳輸器可同時透過至少兩個介質來傳輸機械波。In one embodiment, the mechanical waves are transmitted in a frequency range outside the hearing range (generally regarded as 20 Hz to 20 kHz). In one embodiment, the mechanical waves are transmitted in a frequency range below 20 Hz. In one embodiment, the mechanical waves are transmitted in a frequency range above 20 kHz. In one embodiment, the mechanical waves are transmitted in a frequency range below 20 Hz and above 20 kHz. In one embodiment, the mechanical waves are transmitted in a frequency range covering a portion of the hearing range. In one embodiment, the mechanical waves are transmitted in a frequency range between 1 Hz and 100 kHz. In one embodiment, the mechanical waves are transmitted through air. In one embodiment, the mechanical waves are transmitted through the skin. In one embodiment, the mechanical waves are transmitted through the interior of the body. In one embodiment, the mechanical wave transmitter transmits mechanical waves through water. Those skilled in the art should note that a mechanical wave transmitter can transmit mechanical waves through at least two media simultaneously.
透過其來傳輸機械波之介質將影響所傳輸之機械波之特性。當機械波由MEMS感測器接收且經處理時,處理器可經調適以藉由考量介質及伴隨之機械干擾來區分所傳輸之特定機械波。在一實施例中,所傳輸之機械波可用於基於經處理及接收之機械波來判定身體部分之移動及位置。The medium through which the mechanical waves are transmitted will affect the characteristics of the transmitted mechanical waves. When the mechanical waves are received and processed by the MEMS sensor, the processor can be adapted to distinguish the specific mechanical waves being transmitted by taking into account the medium and accompanying mechanical disturbances. In one embodiment, the transmitted mechanical waves can be used to determine the movement and position of the body part based on the processed and received mechanical waves.
如上文所提及,應瞭解,儘管經由應用MEMS麥克風及聲發射器來討論聲波(機械波)之應用,但代替使用MEMS裝置或除使用MEMS裝置之外,亦可採用能夠發射或接收聲(機械)波之其他裝置。在一實施例中,感測系統使用MEMS加速度計。在一實施例中,感測系統使用MEMS加速度計及其他MEMS裝置(例如一MEMS迴轉儀)。在一實施例中,感測系統使用MEMS及非MEMS壓電裝置。在一實施例中,感測系統使用壓電裝置及其他MEMS裝置。在一實施例中,感測系統使用壓電裝置及加速度計。在一實施例中,感測系統使用加速度計、其他MEMS裝置及壓電裝置。在一實施例中,感測系統使用加速度計及迴轉儀。As mentioned above, it should be appreciated that although the application of acoustic waves (mechanical waves) is discussed through the use of MEMS microphones and acoustic transmitters, alternatives to, or in addition to, the use of MEMS devices, capable of transmitting or receiving acoustic ( mechanical) other devices for waves. In one embodiment, the sensing system uses a MEMS accelerometer. In one embodiment, the sensing system uses MEMS accelerometers and other MEMS devices (eg, a MEMS gyroscope). In one embodiment, the sensing system uses MEMS and non-MEMS piezoelectric devices. In one embodiment, the sensing system uses piezoelectric devices and other MEMS devices. In one embodiment, the sensing system uses piezoelectric devices and accelerometers. In one embodiment, the sensing system uses accelerometers, other MEMS devices, and piezoelectric devices. In one embodiment, the sensing system uses accelerometers and gyroscopes.
採用一或多個不同類型之機械波發射或接收裝置之感測系統可與其他類型之感測模態(諸如使用正交分頻多工之電容感測)進一步整合,如下文將討論。在一實施例中,機械波傳輸器可傳輸至少兩個正交頻率。在一實施例中,MEMS感測器可偵測及接收(偵測及接收之至少一者)正交頻率。Sensing systems employing one or more different types of mechanical wave transmitting or receiving devices can be further integrated with other types of sensing modalities, such as capacitive sensing using quadrature frequency division multiplexing, as discussed below. In one embodiment, the mechanical wave transmitter can transmit at least two orthogonal frequencies. In one embodiment, the MEMS sensor can detect and receive (at least one of detecting and receiving) quadrature frequencies.
圖5展示實施MEMS感測器502(a)至502(c)及機械波傳輸器504(a)至504(b)之一感測系統500之一實施例。除感測系統500之機械波組件之外,感測系統500具有感測一手之位置及移動之一額外模態。特定言之,感測模態實施複數個傳輸天線506及複數個接收天線508。複數個傳輸天線506經調適以傳輸自一信號產生器(圖中未展示)產生之複數個唯一頻率正交信號。當接收複數個唯一頻率正交信號之至少一者時,自量測信號判定有關與傳輸信號互動之身體部分之位置及移動之資訊。可透過使用一快速傅立葉(Fourier)變換來處理接收信號。可在美國專利申請案第15/926,478號、美國專利申請案第15/904,953號、美國專利申請案第16/383,090號及美國專利申請案第16/383,996號(所有上述申請案之內容以引用的方式併入本文中)中找到有關實施傳輸天線(或導體)及接收天線(或導體)之進一步討論。5 shows one embodiment of a
在圖5所展示之實施例中,系統之機械波組件能夠提供可能不易於自其他感測模態確定之有關一身體部分之移動及位置之資訊。特定言之,諸如MEMS感測器502(a)至502(c)之機械波組件能夠易於獲得可能不易於自傳輸天線或接收天線區分之有關身體部分之接觸(諸如手指碰觸)之資訊。In the embodiment shown in Figure 5, the mechanical wave component of the system can provide information about the movement and position of a body part that may not be readily determined from other sensing modalities. In particular, mechanical wave components such as MEMS sensors 502(a)-502(c) can readily obtain information about body part contact (such as finger touch) that may not be readily distinguishable from transmit or receive antennas.
如上文所提及,在一實施例中,機械波傳輸器可各傳輸與所傳輸之信號彼此頻率正交之一信號。上文所揭示之專利申請案中已揭示一快速多碰觸(FMT)感測器之特定原理。相對於機械波傳輸器,特定原理可應用於所傳輸之機械波信號。可傳輸正交信號且可由MEMS感測器接收資訊。在一實施例中,接收器在一取樣週期(τ)期間「取樣」所接收之信號。在一實施例中,信號接著由一信號處理器分析以識別事件(其包含身體部分之位置及移動)。在一實施例中,一或多個傳輸器可傳輸一信號且各自身體部分之移動影響經接收及處理之信號。在其中正交信號係頻率正交之一實施例中,正交頻率之間的間距Δf可至少為量測週期τ之倒數,量測週期τ等於期間取樣行導體之週期。因此,在一實施例中,可使用1千赫茲之頻率間距(Δf)(即,Δf=1/τ)在1毫秒(τ)內量測一行導體處所接收之信號。As mentioned above, in one embodiment, the mechanical wave transmitters may each transmit a signal that is frequency orthogonal to the transmitted signal. The specific principles of a fast multi-touch (FMT) sensor have been disclosed in the patent applications disclosed above. In contrast to mechanical wave transmitters, certain principles can be applied to the transmitted mechanical wave signals. Quadrature signals can be transmitted and information can be received by the MEMS sensor. In one embodiment, the receiver "samples" the received signal during a sampling period (τ). In one embodiment, the signal is then analyzed by a signal processor to identify events (which include the position and movement of body parts). In one embodiment, one or more transmitters may transmit a signal and movement of the respective body part affects the received and processed signal. In an embodiment in which the quadrature signals are quadrature in frequency, the spacing Δf between the quadrature frequencies may be at least the inverse of the measurement period τ, which is equal to the period of the sampling line conductors. Thus, in one embodiment, a signal received at a row of conductors can be measured within 1 millisecond (τ) using a frequency spacing (Δf) of 1 kilohertz (ie, Δf=1/τ).
在一實施例中,一混合信號積體電路(或一下游組件或軟體)之一信號處理器經調適以判定表示所傳輸之各頻率正交信號之至少一值。在一實施例中,混合信號積體電路之信號處理器對所接收之信號執行一傅立葉變換。在一實施例中,混合信號積體電路經調適以數位化所接收之信號。在一實施例中,混合信號積體電路經調適以數位化信號且對數位化資訊執行一離散傅立葉變換(DFT)。在一實施例中,混合信號積體電路(或一下游組件或軟體)經調適以數位化存在於一MEMS感測器、一接收導體及一天線之至少一者上之信號且對數位化資訊執行一快速傅立葉變換(FFT)——一FFT係離散傅立葉變換之一類型。In one embodiment, a signal processor of a mixed-signal integrated circuit (or downstream component or software) is adapted to determine at least one value representing each frequency quadrature signal transmitted. In one embodiment, the signal processor of the mixed-signal integrated circuit performs a Fourier transform on the received signal. In one embodiment, the mixed-signal integrated circuit is adapted to digitize the received signal. In one embodiment, the mixed-signal integrated circuit is adapted to digitize the signal and perform a discrete Fourier transform (DFT) on the digitized information. In one embodiment, mixed-signal integrated circuits (or downstream components or software) are adapted to digitize signals present on at least one of a MEMS sensor, a receive conductor, and an antenna and to digitize information A Fast Fourier Transform (FFT) is performed - an FFT is a type of discrete Fourier transform.
熟習技術者應鑑於本發明明白,一DFT本質上處理在仿佛重複之一取樣週期(例如整合週期)期間取得之數位樣本(例如窗)之序列。因此,不是中心頻率(即,不是整合週期之倒數(該倒數界定最小頻率間距)之整數倍)之信號可具有將小值貢獻至其他DFT格中之相對標稱但非所欲結果。因此,熟習技術者亦應鑑於本發明明白,此等小貢獻不「違反」本文中所使用之術語「正交」。換言之,如本文中所使用之術語「頻率正交」,若使一信號對DFT格之實質上所有貢獻針對不同於另一信號之實質上所有貢獻之DFT格,則兩個信號被視為頻率正交。Those skilled in the art will appreciate in view of the present invention that a DFT essentially processes a sequence of digital samples (eg, windows) taken during seemingly repeating a sampling period (eg, integration period). Therefore, signals that are not center frequencies (ie, not integer multiples of the reciprocal of the integration period (which defines the minimum frequency spacing)) may have a relatively nominal but undesired result of contributing small values into other DFT cells. Accordingly, those skilled in the art will also appreciate in view of the present disclosure that these minor contributions do not "violate" the term "orthogonal" as used herein. In other words, as the term "frequency quadrature" as used herein, two signals are considered frequency if substantially all contributions of one signal to the DFT lattice are made to a different DFT lattice than substantially all contributions of the other signal Orthogonal.
此一取樣信號之一實例如下。在一實施例中,依4.096 Mhz取樣所接收之信號。在一實施例中,依大於4 MHz取樣所接收之信號。為達成kHz取樣,可(例如)依4.096 MHz取得4096個樣本。在此一實施例中,積分週期係1毫秒,其根據頻率間距應大於或等於積分週期之倒數之約束來提供1 KHz之一最小頻率間距。熟習技術者應鑑於本發明明白,依(例如) 4 MHz取得4096個樣本將產生略長於1毫秒之一積分週期且不達成kHz取樣及976.5625 Hz之一最小頻率間距。)在一實施例中,頻率間距等於積分週期之倒數。在此一實施例中,一頻率正交信號範圍之最大頻率應小於2 MHz。在此一實施例中,一頻率正交信號範圍之實際最大頻率應小於取樣速率之約40%或約1.6 MHz。在一實施例中,一DFT (其可為一FFT)用於將數位化接收信號變換成資訊格,各資訊格反映可已由傳輸天線傳輸之一傳輸頻率正交信號之頻率。在一實施例中,2048個格對應於自1 KHz至約2 MHz之頻率。熟習技術者應鑑於本發明明白,此等實例僅供例示。取決於一系統之需要且經受上述約束,可提高或降低取樣速率、可調整積分週期、可調整頻率範圍等等。An example of such a sampled signal is as follows. In one embodiment, the received signal is sampled at 4.096 Mhz. In one embodiment, the received signal is sampled at greater than 4 MHz. To achieve kHz sampling, 4096 samples can be taken, for example, at 4.096 MHz. In this embodiment, the integration period is 1 millisecond, which provides a minimum frequency spacing of 1 KHz based on the constraint that the frequency spacing should be greater than or equal to the inverse of the integration period. Those skilled in the art will appreciate in view of this disclosure that taking 4096 samples at, for example, 4 MHz would result in an integration period slightly longer than 1 millisecond and would not achieve kHz sampling and a minimum frequency spacing of 976.5625 Hz. ) in one embodiment, the frequency spacing is equal to the reciprocal of the integration period. In this embodiment, the maximum frequency of a frequency quadrature signal range should be less than 2 MHz. In such an embodiment, the actual maximum frequency of a frequency quadrature signal range should be less than about 40% of the sampling rate or about 1.6 MHz. In one embodiment, a DFT (which may be an FFT) is used to transform the digitized received signal into information grids, each information grid reflecting the frequency of a transmit frequency quadrature signal that may have been transmitted by the transmit antenna. In one embodiment, 2048 divisions correspond to frequencies from 1 KHz to about 2 MHz. Those skilled in the art will understand in view of the present invention that these examples are merely illustrative. Depending on the needs of a system and subject to the constraints described above, the sampling rate can be increased or decreased, the integration period can be adjusted, the frequency range can be adjusted, and so on.
在一實施例中,一DFT (其可為一FFT)輸出包括所傳輸之各頻率正交信號之一格。在一實施例中,各DFT (其可為一FFT)格包括一同相位(I)及正交(Q)分量。在一實施例中,I及Q分量之平方和用作對應於該格之信號強度之一量測。在一實施例中,I及Q分量之平方和之平方根用作對應於該格之信號強度之量測。熟習技術者應鑑於本發明明白,對應於一格之信號強度之一量測可用作與肌肉活動相關之一量測。換言之,對應於一給定格中之信號強度之量測將由於源於身體肌肉之某一活動而改變。In one embodiment, a DFT (which may be an FFT) output includes a lattice of the transmitted frequency quadrature signals. In one embodiment, each DFT (which may be an FFT) lattice includes in-phase (I) and quadrature (Q) components. In one embodiment, the sum of the squares of the I and Q components is used as a measure of the signal strength corresponding to the grid. In one embodiment, the square root of the sum of the squares of the I and Q components is used as a measure of the signal strength corresponding to the grid. Those skilled in the art will appreciate in view of the present invention that a measure of signal strength corresponding to a grid can be used as a measure related to muscle activity. In other words, the measure corresponding to the signal strength in a given cell will change due to some activity originating from the muscles of the body.
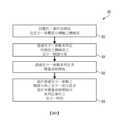
現轉至圖6,描述分析由一MEMS感測器接收之一機械波之一實例性方法600。在一實施例中,一機械波由本文中所描述之一機械波傳輸器傳輸。在一實施例中,機械波傳輸器係使用者之身體。在一實施例中,回應於由一身體部分實現之一事件而傳輸機械波。在一實施例中,事件係捏持、輕拍、按扣、扭動及握拳之至少一者。Turning now to FIG. 6, an
在步驟602中,由一MEMS感測器接收機械波。在一實施例中,藉由至少使用一MEMS感測器取樣機械波來數位化機械波。在步驟604中,判定接收機械波之光譜分佈。熟習技術者應明白,可藉由對數位化資訊執行一離散傅立葉變換(DFT)(其可為一FFT)來判定頻譜分佈。在一實施例中,在步驟604中,判定功率頻譜密度資料組(即,跨小時間片段之多個FFT執行)。如下文將進一步詳細討論,進一步處理功率頻譜密度資料以識別及分類事件(即,手勢、運動、姿勢)。In
在步驟606中,排除一預定頻率範圍外之頻格。在一實施例中,頻率範圍界限與個別身體部分之諧振頻率相關聯。在一實施例中,藉由先前使至少一頻率範圍與至少一事件相關聯來判定頻率範圍界限。在一實施例中,藉由判定由執行一已知事件之身體部分傳輸之機械波之頻格來達成使至少一頻率範圍與至少一事件相關聯。在一實施例中,頻率範圍界限係任意頻率。In
在步驟608中,排除頻率範圍界限內之數個頻格。在一實施例中,排除頻率範圍界限內之至少一頻格。在一實施例中,不排除頻率範圍界限內之頻格。在一實施例中,由頻率範圍界限內之頻格之總數判定經排除頻格之數目。在一實施例中,經排除頻格之數目係頻格之總數之一百分比。在一實施例中,經排除頻格之數目係頻率範圍界限內之頻格之總數之一百分比。在一實施例中,經排除頻格之數目係頻格之一任意數目。在一實施例中,經排除頻格之數目與事件相關聯。在一實施例中,藉由先前使至少一頻格與至少一事件相關聯來判定經排除頻格之數目。In
在一實施例中,由一臨限值判定經排除頻格之數目。在一實施例中,臨限值與至少一頻格之能量位準相關聯。在一實施例中,臨限值與存在於機械波中之雜訊之能量位準相關聯。在一實施例中,任意判定臨限值。在一實施例中,藉由先前使至少一頻格與至少一事件相關聯來判定臨限值。在一實施例中,判定至少一頻格高於臨限值可指示一事件已發生。在一實施例中,判定至少一頻格高於臨限值可指示已發生之事件之類型。在一實施例中,判定至少一頻格高於臨限值可基於高於臨限值之至少一頻格來指示已發生之事件之類型。In one embodiment, the number of excluded bins is determined by a threshold value. In one embodiment, the threshold value is associated with an energy level of at least one frequency bin. In one embodiment, the threshold value is associated with the energy level of the noise present in the mechanical wave. In one embodiment, the threshold value is arbitrarily determined. In one embodiment, the threshold value is determined by previously associating at least one frequency bin with at least one event. In one embodiment, determining that at least one frequency frame is above a threshold value may indicate that an event has occurred. In one embodiment, determining that at least one frequency is above a threshold value may indicate the type of event that has occurred. In one embodiment, determining that the at least one frequency bin is above a threshold value may be indicative of the type of event that has occurred based on the at least one frequency bin above the threshold value.
在步驟610中,判定頻格之一高斯(gaussian)分佈模板。在一實施例中,基於頻率範圍界限內之未排除頻格來判定高斯分佈模板。在一實施例中,基於高於一預定臨限值之頻率範圍界限內之未排除頻格來判定高斯分佈模板。在一實施例中,基於頻率範圍界限內之所有頻格來判定高斯分佈模板。在一實施例中,基於所有頻格來判定高斯分佈模板。在一實施例中,基於任意數目個頻格來判定高斯分佈模板。在一實施例中,基於任意頻格來判定高斯分佈模板。在一實施例中,基於具有最高能量位準之頻格來判定高斯分佈模板。在一實施例中,基於先前與一已知事件相關聯之頻格來判定高斯分佈模板。在一實施例中,基於至少一頻格之至少一特性來判定高斯分佈模板。In
在步驟612中,比較頻率範圍界限內之未排除頻格與高斯分佈模板以判定事件之至少一特性。在一實施例中,方法600判定至少一些未排除頻格是否落於高斯分佈模板內以判定事件之至少一特性。在一實施例中,方法600判定所有未排除頻格是否落於高斯分佈模板內以判定事件之至少一特性。In
在一實施例中,至少一特性係事件是否已發生。在一實施例中,至少一特性係事件之類型。如上文所提及,在一實施例中,事件之類型係捏持、輕拍、按扣、扭動及握拳之至少一者。在一實施例中,至少一特性係事件係多長。在一實施例中,至少一特性係與事件相關聯之一力。在一實施例中,至少一特性係事件中涉及哪些身體部分。在一實施例中,至少一特性係事件中涉及哪些手指。在一實施例中,至少一特性係事件中是否涉及一物體。在一實施例中,至少一特性係事件中涉及什麼類型之物體。In one embodiment, at least one characteristic is whether an event has occurred. In one embodiment, the at least one characteristic is a type of event. As mentioned above, in one embodiment, the type of event is at least one of pinch, tap, snap, twist, and fist. In one embodiment, at least one characteristic is how long the event is. In one embodiment, the at least one characteristic is a force associated with the event. In one embodiment, at least one characteristic is related to which body parts are involved in the event. In one embodiment, at least one characteristic is which fingers are involved in the event. In one embodiment, at least one characteristic is whether an object is involved in the event. In one embodiment, at least one characteristic is what type of object is involved in the event.
圖7展示繪示分析由一MEMS感測器接收之一機械波之一實例性方法之概念之一曲線圖。沿x軸定位之頻格702、703及704表示存在於一接收機械波中之不同頻率。在一實施例中,y軸表示對應於頻格之能量位準。頻率範圍界限由低頻率界限706及高頻率界限708限定。頻格703由於在頻率範圍界限外而被排除。頻格704由於低於臨限值709而被排除。基於至少一頻格702、703及704來判定高斯分佈模板710。在一實施例中,基於至少一未排除頻格702來判定高斯分佈模板710。7 shows a graph showing a concept of an example method of analyzing a mechanical wave received by a MEMS sensor. The
現轉至圖8,描述分析由一MEMS感測器接收之一機械波之一實例性方法800。在步驟802中,由至少一MEMS感測器接收機械波。Turning now to FIG. 8, an
在步驟804,透過至少一參數來判定接收機械波之至少一頻譜分佈。在一實施例中,至少一參數係時間。在一實施例中,當至少一參數係時間時,在循序時間例項中判定接收機械波之頻譜分佈。在一實施例中,循序時間例項可連續。在一實施例中,循序時間例項不連續。In
在一實施例中,至少一參數與接收機械波之MEMS感測器之類型及數量之至少一者相關聯。作為一實例,藉由分析由至少兩個MEMS感測器在相同時間點、重疊時間點或不同時間點提供之關於相同機械波之數位化資訊來判定頻譜分佈。在一實施例中,至少兩個MEMS感測器可具有不同類型(例如至少一MEMS麥克風、至少一MEMS加速度計及至少一MEMS迴轉儀)。在一實施例中,至少兩個MEMS感測器可具有相同類型(例如多個MEMS麥克風、多個MEMS加速度計或多個MEMS迴轉儀)。In one embodiment, the at least one parameter is associated with at least one of a type and a number of MEMS sensors that receive mechanical waves. As an example, the spectral distribution is determined by analyzing digitized information about the same mechanical wave provided by at least two MEMS sensors at the same time point, overlapping time points, or different time points. In one embodiment, the at least two MEMS sensors may be of different types (eg, at least one MEMS microphone, at least one MEMS accelerometer, and at least one MEMS gyroscope). In an embodiment, at least two MEMS sensors may be of the same type (eg, multiple MEMS microphones, multiple MEMS accelerometers, or multiple MEMS gyroscopes).
如本發明中別處所闡述,在一實施例中,排除至少一頻譜分佈之至少一頻格。在一實施例中,不排除頻格。如本文中別處所闡述,在一實施例中,針對至少一頻譜分佈來判定至少一頻率範圍。As set forth elsewhere in this disclosure, in one embodiment, at least one frequency bin of at least one spectral distribution is excluded. In one embodiment, frequency bins are not excluded. As set forth elsewhere herein, in one embodiment, at least one frequency range is determined for at least one spectral distribution.
在步驟806中,透過至少一參數來判定頻格之一多變量高斯分佈模板。在一實施例中,基於未排除頻格之至少一者來判定多變量高斯分佈模板。在一實施例中,基於頻率範圍界限內之所有頻格來判定多變量高斯分佈模板。在一實施例中,基於所有頻格來判定多變量高斯分佈模板。在一實施例中,基於任意數目個頻格來判定多變量高斯分佈模板。在一實施例中,基於任意頻格來判定多變量高斯分佈模板。在一實施例中,基於具有最高能量位準之頻格來判定多變量高斯分佈模板。在一實施例中,基於先前與一已知事件相關聯之頻格來判定多變量高斯分佈模板。在一實施例中,基於至少一頻格之至少一特性來判定多變量高斯分佈模板。In
在步驟808中,比較透過至少一參數之至少一頻譜分佈與多變量高斯分佈模板以判定事件之至少一特性。在一實施例中,方法800透過至少一參數來判定至少一頻譜分佈之至少一些頻格是否落於多變量高斯分佈模板內以判定事件之至少一特性。In
在一實施例中,至少一特性係事件是否已發生。在一實施例中,至少一特性係事件之類型。如上文所提及,在一實施例中,事件之類型係捏持、輕拍、按扣、扭動及握拳之至少一者。在一實施例中,至少一特性係事件中涉及哪些身體部分。在一實施例中,至少一特性係事件中涉及哪些手指。在一實施例中,至少一特性係事件中是否涉及一物體。在一實施例中,至少一特性係事件中涉及什麼類型之物體。In one embodiment, at least one characteristic is whether an event has occurred. In one embodiment, the at least one characteristic is a type of event. As mentioned above, in one embodiment, the type of event is at least one of pinch, tap, snap, twist, and fist. In one embodiment, at least one characteristic is related to which body parts are involved in the event. In one embodiment, at least one characteristic is which fingers are involved in the event. In one embodiment, at least one characteristic is whether an object is involved in the event. In one embodiment, at least one characteristic is what type of object is involved in the event.
現轉至圖9,描述分析由一MEMS感測器(例如加速度計或迴轉儀)接收之一機械波之一實例性方法900。在步驟902中,系統使用至少一MEMS感測器來獲取一機械波之N個樣本。在步驟904中,判定一樣本與下一樣本之間的差。作為一非限制性實例,當N=10時,判定一樣本(例如N0)與下一樣本(例如N1)之間的差。接著,在步驟906中,判定樣本之間的差之頻譜分佈。Turning now to FIG. 9, an
在步驟908中,排除至少一頻格。在一實施例中,經排除之頻格之數目計算為所有頻格之一部分。在一實施例中,不排除頻格。在一實施例中,排除任意數目個頻格。In
在步驟910中,排除低於一預定臨限能量位準之至少一頻格。在一實施例中,臨限值係一任意能量位準。在一實施例中,臨限值計算為至少一頻格之能量位準之一部分。在一實施例中,臨限值與至少一頻格之能量位準相關聯。在一實施例中,臨限值與存在於機械波中之雜訊之能量位準相關聯。在一實施例中,任意判定臨限值。在一實施例中,藉由先前使至少一頻格與至少一事件相關聯來判定臨限值。在一實施例中,判定至少一頻格高於臨限值可指示一事件已發生。在一實施例中,判定至少一頻格高於臨限值可指示已發生之事件之類型。在一實施例中,判定至少一頻格高於臨限值可基於高於臨限值之至少一頻格來指示已發生之事件之類型。In
在步驟912中,系統基於至少一頻格是否高於臨限值來判定事件之至少一特性。在一實施例中,至少一特性係事件是否已發生。在一實施例中,至少一特性係事件之類型。如上文所提及,在一實施例中,事件之類型係捏持、輕拍、按扣、扭動及握拳之至少一者。在一實施例中,至少一特性係事件中涉及哪些身體部分。在一實施例中,至少一特性係事件中涉及哪些手指。在一實施例中,至少一特性係事件中是否涉及一物體。在一實施例中,至少一特性係事件中涉及什麼類型之物體。In
本發明之一態樣係一種分析一機械波及一電子信號之至少一者之方法。在一實施例中,方法包括使用小波處理來自在至少一身體部分與至少一其他身體部分互動(在一實施例中在兩個手指之間)時由至少一身體部分傳輸之一機械波及一電子信號之至少一者偵測事件。One aspect of the invention is a method of analyzing at least one of a mechanical wave and an electronic signal. In one embodiment, the method includes using wavelet processing from a mechanical wave and an electron transmitted by at least one body part as it interacts with at least one other body part (between two fingers in one embodiment) At least one of the signals detects an event.
在一實施例中,方法包括一小波變換或連續小波變換(CWT)。一CWT類似於FFT,因為其可產生頻率成分隨時間變化之二維表示形式。在一實施例中,根據被分析之信號之類型來調諧一CWT (類似於一匹配濾波器)。在一實施例中,可藉由改變所使用之小波之類型來調諧一CWT。熟習技術者應注意,小波不是一固定形狀且已開發大量小波類型,因此,特定小波係非限制性的且可使用諸多小波類型。In one embodiment, the method includes a wavelet transform or continuous wavelet transform (CWT). A CWT is similar to an FFT in that it produces a two-dimensional representation of frequency components over time. In one embodiment, a CWT (similar to a matched filter) is tuned according to the type of signal being analyzed. In one embodiment, a CWT can be tuned by changing the type of wavelet used. Those skilled in the art should note that a wavelet is not a fixed shape and a large number of wavelet types have been developed, so a particular wavelet is non-limiting and many wavelet types can be used.
本發明之一態樣係一種分析一機械波及一電子信號之至少一者以判定一指紋及事件分類之方法。在一實施例中,使用者指紋表示屬於一特定使用者之一特定移動之一特徵;其可用於區分相同系統之使用者。在一實施例中,在一機械波及一電子信號之至少一者中找到使用者指紋。One aspect of the present invention is a method of analyzing at least one of a mechanical wave and an electronic signal to determine a fingerprint and event classification. In one embodiment, a user fingerprint represents a characteristic of a specific movement belonging to a specific user; it can be used to distinguish users of the same system. In one embodiment, the user fingerprint is found in at least one of a mechanical wave and an electronic signal.
如上文所提及,本文中所描述之系統及方法涉及相關於且用於設計、製造及使用實施機械波信號之感測器之原理。機械波信號(例如聲或振動信號)具有可用於分類或識別與被分析之信號相關聯之事件或產生被分析之信號之源之特徵或描述符。此等特徵包含(但不限於)音量、音高、過零率(ZCR)、能量、質心(如下文將進一步詳細解釋)及頻寬。此等特徵可廣泛分類為全域時間特徵、瞬時時間特徵、能量特徵、頻譜形狀特徵、諧波特徵及感知特徵等等。圖10繪示信號處理之不同階段與各步驟中所分析之特徵之間的關係。As mentioned above, the systems and methods described herein relate to principles related to and for the design, manufacture, and use of sensors that implement mechanical wave signals. A mechanical wave signal, such as an acoustic or vibrational signal, has features or descriptors that can be used to classify or identify the event associated with the analyzed signal or the source that generated the analyzed signal. Such characteristics include, but are not limited to, volume, pitch, zero-crossing rate (ZCR), energy, centroid (as explained in further detail below), and bandwidth. These features can be broadly classified as global temporal features, instantaneous temporal features, energy features, spectral shape features, harmonic features, perceptual features, and the like. Figure 10 shows the relationship between the different stages of signal processing and the features analyzed in each step.
在一實施例中,提取一接收機械波信號之特徵之一方法包含一預運算階段。在此階段期間,可判定多個信號表示形式以促進在稍後處理階段期間稍後提取描述符。In one embodiment, a method of extracting features of a received mechanical wave signal includes a pre-computing stage. During this stage, a number of signal representations may be determined to facilitate later extraction of descriptors during later processing stages.
在一實施例中,一信號表示形式包括估計信號之能量包絡。一信號之能量包絡可用於計算全域描述符(即,對數時間攻擊、時間質心)。在一實施例中,可使用分析信號振幅之一低通濾波來計算能量包絡。在一實施例中,能量包絡之高效計算依賴信號之至少一部分(例如局部信號、加窗信號或信號框)之瞬時RMS值。In one embodiment, a signal representation includes estimating the energy envelope of the signal. The energy envelope of a signal can be used to compute global descriptors (ie, logarithmic temporal attack, temporal centroid). In one embodiment, the energy envelope may be calculated using a low pass filtering of the analyzed signal amplitude. In one embodiment, efficient computation of the energy envelope relies on the instantaneous RMS value of at least a portion of the signal (eg, a local signal, a windowed signal, or a signal frame).
在一實施例中,一信號表示形式包括信號之至少一部分之短時間傅立葉變換(STFT)。在一實施例中,短時間傅立葉變換由信號之至少一部分之能量曲線之一斜率變化或斜率攻擊觸發。In one embodiment, a signal representation includes a short time Fourier transform (STFT) of at least a portion of the signal. In one embodiment, the short-time Fourier transform is triggered by a slope change or slope attack of the energy curve of at least a portion of the signal.
在一實施例中,一信號表示形式包括信號之一正弦諧波模型。在一實施例中,正弦諧波模型依賴在各訊框期間估計局部信號(即,加窗信號)之STFT之峰值。在一實施例中,一加窗信號係512個信號寬且依128個樣本累加。在一實施例中,可識別接近基頻之STFT峰值以估計正弦諧波頻率及振幅。In one embodiment, a signal representation includes a sinusoidal harmonic model of the signal. In one embodiment, the sinusoidal harmonic model relies on estimating the peak value of the STFT of the local signal (ie, the windowed signal) during each frame. In one embodiment, a windowed signal is 512 signals wide and accumulated by 128 samples. In one embodiment, STFT peaks near the fundamental frequency can be identified to estimate sinusoidal harmonic frequencies and amplitudes.
如圖10中所展示,在信號處理管線之不同階段中獲得全域描述符或全域時間特徵。在一實施例中,可藉由分析能量包絡(即,能量特徵化)來自一信號框提取一全域時間特徵或描述符。在一實施例中,此分析聚焦於一斜率攻擊。在一實施例中,使用以下兩個參數來描述攻擊部分:攻擊之持續時間及攻擊之能量之平均斜率(即,增加因數)。在一實施例中,可藉由應用界定攻擊之開始及結束之一組臨限值來估計攻擊之持續時間。在一實施例中,當達成一低臨限值時,判定攻擊開始。在一實施例中,若達成一高臨限值,則判定攻擊結束。在一實施例中,臨限值係預定能量位準。在一實施例中,相對於信號之所有能量位準來動態計算臨限值。在一實施例中,使用有限脈衝回應(FIR)來判定臨限值。在一實施例中,使用有限脈衝回應(FIR)來補充臨限值。As shown in Figure 10, global descriptors or global temporal features are obtained in different stages of the signal processing pipeline. In one embodiment, a global temporal feature or descriptor may be extracted from a signal frame by analyzing the energy envelope (ie, energy characterization). In one embodiment, this analysis focuses on a slope attack. In one embodiment, the attack portion is described using two parameters: the duration of the attack and the average slope (ie, the increase factor) of the energy of the attack. In one embodiment, the duration of an attack can be estimated by applying a set of thresholds that define the start and end of the attack. In one embodiment, the attack is determined to be initiated when a low threshold value is reached. In one embodiment, if a high threshold value is reached, it is determined that the attack is over. In one embodiment, the threshold value is a predetermined energy level. In one embodiment, the threshold value is calculated dynamically with respect to all energy levels of the signal. In one embodiment, a finite impulse response (FIR) is used to determine the threshold value. In one embodiment, a finite impulse response (FIR) is used to supplement the threshold value.
在一實施例中,藉由使用一對數時間攻擊法來分析能量包絡。使用此方法,藉由使用信號開始之時間至其達到穩定部分之時間之間的持續時間之對數來判定攻擊開始及結束。In one embodiment, the energy envelope is analyzed by using a logarithmic time attack method. Using this method, the attack starts and ends by using the logarithm of the duration between the time the signal starts and the time it reaches the stable portion.
在一實施例中,藉由使用一時間質心法來分析能量包絡。使用此方法,可平均化能量包絡上之時間。在一實施例中,此方法有助於區分由於一敲擊事件(例如一輕拍)而產生之信號及自持續性事件(例如一捏持或一按壓)產生之信號,因為來自敲擊事件之信號傾向於具有一低時間質心。In one embodiment, the energy envelope is analyzed by using a time centroid method. Using this method, the time over the energy envelope can be averaged. In one embodiment, this method helps to distinguish between signals generated due to a tap event (eg, a tap) and signals generated from persistent events (eg, a pinch or a press), since signals from a tap event The signal tends to have a low time centroid.
在一實施例中,藉由使用一時間增加法來分析能量包絡。使用此方法,增加時間可界定為時間攻擊期間之能量之平均時間斜率。在一實施例中,可藉由運算對應於被分析之各窗之能量之局部斜率且接著運算斜率之加權平均值來導出平均時間斜率。In one embodiment, the energy envelope is analyzed by using a time increment method. Using this method, the increase time can be defined as the average time slope of the energy during the time attack. In one embodiment, the average temporal slope may be derived by computing the local slopes of the energy corresponding to each window being analyzed and then computing the weighted average of the slopes.
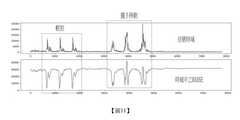
返回至圖10,在一實施例中,可自瞬時時間特徵獲得全域描述符。在一實施例中,可使用一自相關法來判定瞬時時間特徵。此方法使用以下方程式來計算時域中之信號之均方根誤差(RMSE)。
信號頻譜分佈本質上表示於時域中。圖11繪示時域與一接收信號之RMSE之間的關係。在一實施例中,可藉由比較信號與RMSE來區分事件。在一實施例中,自擺手移動區分一輕拍事件。在一實施例中,輕拍事件具有時域與時域中之RMSE之間的一低誤差。在一實施例中,擺手移動具有較高誤差,因為發現諧振不匹配。圖12繪示時域中之一信號及時間中之信號之RMSE之一擴展圖。應注意,在一實施例中,50毫秒之一延遲發生於移動開始與適當分類之間。The signal spectral distribution is essentially represented in the time domain. Figure 11 shows the relationship between the time domain and the RMSE of a received signal. In one embodiment, events can be distinguished by comparing the signal to the RMSE. In one embodiment, a tap event is distinguished from a hand wave movement. In one embodiment, the tap event has a low error between the time domain and the RMSE in the time domain. In one embodiment, the hand waving movement has a higher error because the resonances are found to be mismatched. Figure 12 shows an expanded graph of the RMSE of a signal in the time domain and a signal in time. It should be noted that, in one embodiment, a delay of 50 milliseconds occurs between the start of movement and proper classification.
在一實施例中,使用一過零率(ZCR)法來判定瞬時時間特徵。此方法量測信號跨過原點(即,0軸)之次數。在一實施例中,週期性聲音具有一低ZCR。在一實施例中,週期性聲音具有一低ZCR,因為脈衝相對於其他信號係高能量且攜載大部分信號。在一實施例中,嘈雜聲音具有一高ZCR。In one embodiment, a zero-crossing rate (ZCR) method is used to determine instantaneous time characteristics. This method measures the number of times the signal crosses the origin (ie, the 0 axis). In one embodiment, the periodic sound has a low ZCR. In one embodiment, periodic sounds have a low ZCR because the pulses are high energy relative to other signals and carry most of the signal. In one embodiment, noisy sounds have a high ZCR.
仍參考圖10,在一實施例中,全域描述符亦可自能量特徵獲得。在一實施例中,能量特徵包含總能量(即,估計一給定時間之信號功率或自一給定時間周圍之信號框直接估計信號功率)。在一實施例中,能量特徵包含諧波部分能量(即,估計一給定時間之信號之諧波部分之功率或自一給定時間之估計諧波振幅估計功率)。在一實施例中,能量特徵包含雜訊部分能量(即,估計一給定時間之信號之雜訊部分之功率或藉由自信號減去諧波部分來估計功率)。Still referring to Figure 10, in one embodiment, global descriptors can also be obtained from energy features. In one embodiment, the energy feature includes the total energy (ie, estimating the signal power at a given time or directly estimating the signal power from a signal frame around a given time). In one embodiment, the energy signature includes the harmonic component energy (ie, the estimated power of the harmonic component of the signal at a given time or the estimated power from the estimated harmonic amplitude at a given time). In one embodiment, the energy signature includes the noise portion energy (ie, estimating the power of the noise portion of the signal at a given time or estimating the power by subtracting the harmonic portion from the signal).
在一實施例中,全域描述符自頻譜特徵獲得。在一實施例中,頻譜特徵包含(但不限於)頻譜形狀描述、頻譜之時間變動及全域頻譜形狀描述。在一實施例中,頻譜形狀描述係基於頻譜重心(即,頻譜之重心)。在一實施例中,頻譜形狀描述係基於頻譜質心(即,頻譜之重心)量測頻譜偏斜度(即,量測圍繞其均值之一分佈之對稱性)。頻譜偏斜度描述分佈之不對稱性程度(即,SK=0-對稱分佈,SK<0-右邊之更多能量(高頻),SK>0-左邊之更多能量(低頻))。在一實施例中,頻譜形狀描述係基於頻譜散佈(即,頻譜圍繞其均值之散佈)。在一實施例中,頻譜之時間變動表示頻譜沿時間之變動量。在一實施例中,全域頻譜形狀描述係基於梅爾(Mel)頻率倒頻譜係數(MFCC)。應注意,MFCC表示具有非常少係數之頻譜之形狀。在此方法中,找到頻譜之對數之傅立葉變換。接著,在梅爾頻帶上計算梅爾倒頻譜、倒頻譜。In one embodiment, the global descriptor is obtained from spectral features. In one embodiment, the spectral features include, but are not limited to, spectral shape descriptions, temporal variations of the spectrum, and global spectral shape descriptions. In one embodiment, the spectral shape description is based on the spectral centroid (ie, the centroid of the spectrum). In one embodiment, the spectral shape description is a measure of spectral skewness (ie, a measure of the symmetry of the distribution around one of its means) based on the spectral centroid (ie, the center of gravity of the spectrum). Spectral skewness describes the degree of asymmetry of the distribution (ie, SK = 0 - symmetrical distribution, SK < 0 - more energy on the right (high frequencies), SK > 0 - more energy on the left (low frequencies)). In one embodiment, the spectral shape description is based on spectral spread (ie, the spread of the spectrum around its mean). In one embodiment, the time variation of the spectrum represents the amount of variation of the spectrum along time. In one embodiment, the global spectral shape description is based on Mel (Mel) frequency cepstral coefficients (MFCCs). It should be noted that MFCC represents the shape of the spectrum with very few coefficients. In this method, the Fourier transform of the logarithm of the spectrum is found. Next, Mel cepstrum and cepstrum are calculated on the Mel band.
在一實施例中,自諧波特徵獲得全域描述符。在一實施例中,諧波特徵包含基頻(即,使得其整數倍最佳解釋信號頻譜之內容之頻率)、雜訊度(即,雜訊(非諧波部分)之能量與總能量之間的比率)、失諧度(即,信號頻譜分量自一純諧波信號之散度)及諧波頻譜偏差(即,振幅諧波峰值自一全域頻譜包絡之偏差)。在一實施例中,接近1之一雜訊度位準指示一純雜訊信號,且接近0之一雜訊度位準指示一純諧波信號。應注意,諧波頻譜偏差本質上產生一追蹤平滑曲線,碰觸一信號之各諧波,且接著自其量測偏差。在一實施例中,諧波頻譜偏差提取頻譜變異數。頻譜變異數係一信號之量譜之標準偏差之一量測。在一實施例中,所觀察到之輕拍信號似乎具有少量諧波頻譜偏差以進一步暗示其類似於一破裂音停止。In one embodiment, global descriptors are obtained from harmonic features. In one embodiment, the harmonic characteristics include the fundamental frequency (ie, the frequency whose integer multiples best explain the content of the signal spectrum), the noise level (ie, the energy of the noise (non-harmonic portion) and the total energy. ratio), degree of detuning (ie, the divergence of signal spectral components from a pure harmonic signal), and harmonic spectral deviation (ie, the deviation of amplitude harmonic peaks from a global spectral envelope). In one embodiment, a noise level near 1 indicates a pure noise signal, and a noise level near 0 indicates a pure harmonic signal. It should be noted that the harmonic spectral deviation essentially produces a tracking smooth curve, touching each harmonic of a signal, and then measuring the deviation therefrom. In one embodiment, the harmonic spectral deviation extracts the spectral variance. Spectral variance is a measure of the standard deviation of the magnitude spectrum of a signal. In one embodiment, the observed tap signal appears to have a small amount of harmonic spectral deviation to further suggest that it resembles a crackling stop.
在一實施例中,自知覺特徵獲得全域描述符。在一實施例中,知覺特徵包含特定響度(即,與各巴克(bark)帶相關聯之響度)、總響度(即,個別響度之和)及銳度。銳度係倒頻譜質心之等效物,但使用巴克帶之特定響度來計算。In one embodiment, global descriptors are obtained from perceptual features. In one embodiment, the perceptual features include specific loudness (ie, the loudness associated with each bark band), total loudness (ie, the sum of the individual loudnesses), and sharpness. Sharpness is the equivalent of the cepstral centroid, but is calculated using the specific loudness of the Bark band.
在一實施例中,在獲得全域描述符之後,可蒐集關於事件之資訊(即,類型、力、持續時間)。可利用若干方法來將事件分類於此等類別內。例如,可應用卷積神經網路及機器學習來辨識資料中之圖案且基於此等圖案來分類事件。類似地,可比較資料與不同事件之已知特性之已知描述符。In one embodiment, after obtaining the global descriptor, information about the event (ie, type, force, duration) may be collected. Events can be classified into these categories using several methods. For example, convolutional neural networks and machine learning can be applied to identify patterns in data and classify events based on those patterns. Similarly, data can be compared to known descriptors of known characteristics of different events.
本發明之一態樣係一種穿戴式感測系統,其包括:至少一MEMS感測器,其固定至一使用者,該MEMS感測器經調適以在該使用者實現一事件時接收由該使用者之一身體部分產生之機械波信號;及一處理器,其操作地連接至該至少一MEMS感測器。該處理器經調適以判定該接收機械波信號之頻譜分佈且自該頻譜分佈提取與該身體部分之移動或姿勢相關之至少一描述符。One aspect of the invention is a wearable sensing system comprising: at least one MEMS sensor affixed to a user, the MEMS sensor adapted to receive information from the user when the user implements an event a mechanical wave signal generated by a body part of the user; and a processor operatively connected to the at least one MEMS sensor. The processor is adapted to determine a spectral distribution of the received mechanical wave signal and extract from the spectral distribution at least one descriptor related to movement or posture of the body part.
本發明之另一態樣係一種包括相鄰於一使用者之一第一身體部分之一基板之穿戴式感測系統。該穿戴式感測系統進一步包括:至少一MEMS感測器,其機械連接至該基板且經調適以接收透過該基板所傳輸之機械波信號;及一處理器,其可操作地連接至該至少一MEMS感測器。該處理器經調適以判定藉由該MEMS感測器之該等接收機械波信號之各者之一量測且判定與由該第一身體部分實現之一事件相關聯之至少一描述符。Another aspect of the present invention is a wearable sensing system including a substrate adjacent to a first body part of a user. The wearable sensing system further includes: at least one MEMS sensor mechanically connected to the substrate and adapted to receive mechanical wave signals transmitted through the substrate; and a processor operably connected to the at least one a MEMS sensor. The processor is adapted to determine a measurement by each of the received mechanical wave signals of the MEMS sensor and to determine at least one descriptor associated with an event achieved by the first body part.
本發明之又一態樣係一種機械波感測系統。在一實施例中,該機械波感測系統係一聲感測系統。該機械波感測系統包括:一基板,其經調適以定位於一使用者之身體上;複數個MEMS麥克風,其等經調適以接收機械波,其中該複數個MEMS麥克風之至少一者可操作地附接至該基板;一處理器,其可操作地連接至該複數個MEMS麥克風及複數個接收天線,其中該處理器經調適以處理由該複數個MEMS麥克風接收之該等機械波之量測且使用該等量測來判定關於一身體部分之移動之資訊。Yet another aspect of the present invention is a mechanical wave sensing system. In one embodiment, the mechanical wave sensing system is an acoustic sensing system. The mechanical wave sensing system includes: a substrate adapted to be positioned on a user's body; a plurality of MEMS microphones adapted to receive mechanical waves, wherein at least one of the plurality of MEMS microphones is operable groundly attached to the substrate; a processor operably connected to the plurality of MEMS microphones and a plurality of receive antennas, wherein the processor is adapted to process the quantities of the mechanical waves received by the plurality of MEMS microphones Take measurements and use those measurements to determine information about the movement of a body part.
本發明之又一態樣係一種系統。該系統包括:一基板;複數個MEMS感測器,其等經調適以接收機械波,其中該複數個MEMS感測器之至少一者可操作地附接至該基板;複數個傳輸天線,其中該複數個傳輸天線之至少一者可操作地連接至一信號產生器,其中該信號產生器經調適以產生複數個唯一頻率正交信號且該複數個唯一頻率正交信號之各者彼此頻率正交;複數個接收天線,其中該複數個接收天線經調適以接收該複數個唯一頻率正交信號;及一處理器,其可操作地連接至該複數個MEMS感測器及該複數個接收天線,其中該處理器經調適以處理由該複數個MEMS麥克風接收之該等機械波之量測且處理該等接收唯一頻率正交信號之量測,其中該等機械波及該等接收唯一頻率正交信號之經處理量測用於判定關於一身體部分之移動之資訊。Yet another aspect of the present invention is a system. The system includes: a substrate; a plurality of MEMS sensors adapted to receive mechanical waves, wherein at least one of the plurality of MEMS sensors is operably attached to the substrate; a plurality of transmission antennas, wherein At least one of the plurality of transmit antennas is operatively connected to a signal generator, wherein the signal generator is adapted to generate a plurality of unique frequency quadrature signals and each of the plurality of unique frequency quadrature signals are frequency positive with respect to each other a plurality of receive antennas, wherein the plurality of receive antennas are adapted to receive the plurality of unique frequency quadrature signals; and a processor operably connected to the plurality of MEMS sensors and the plurality of receive antennas , wherein the processor is adapted to process the measurements of the mechanical waves received by the plurality of MEMS microphones and to process the measurements of the received unique frequency quadrature signals, wherein the mechanical waves and the received unique frequency quadrature Processed measurements of the signal are used to determine information about the movement of a body part.
儘管已參考本發明之一較佳實施例來特定展示及描述本發明,但熟習技術者應瞭解,可在不背離本發明之精神及範疇之情況下對本發明作出各種形式及細節改變。Although the present invention has been particularly shown and described with reference to a preferred embodiment thereof, it will be understood by those skilled in the art that various changes in form and detail may be made therein without departing from the spirit and scope of the invention.
10:MEMS麥克風12:板14:孔16:電極18:導電板20:室22:通風口200:感測系統201:基板202:微機電系統感測器203:處理器300:感測系統302(a):MEMS感測器302(b):MEMS感測器302(c):MEMS感測器303:處理器400:感測系統401:基板402(a):MEMS感測器402(b):MEMS感測器402(c):MEMS感測器402(d):MEMS感測器404(a):機械波傳輸器404(b):機械波傳輸器500:感測系統502(a):MEMS感測器502(b):MEMS感測器502(c):MEMS感測器504(a):機械波傳輸器504(b):機械波傳輸器506:傳輸天線508:接收天線600:方法602:步驟604:步驟606:步驟608:步驟610:步驟612:步驟702:頻格703:頻格704:頻格706:低頻率界限708:高頻率界限709:臨限值710:高斯分佈模板800:方法802:步驟804:步驟806:步驟808:步驟900:方法902:步驟904:步驟906:步驟908:步驟910:步驟912:步驟10: MEMS Microphone12: Board14: Hole16: Electrodes18: Conductive plate20: Room22: Vents200: Sensing System201: Substrate202: MEMS Sensors203: Processor300: Sensing System302(a): MEMS sensors302(b): MEMS sensors302(c): MEMS sensors303: Processor400: Sensing System401: Substrate402(a): MEMS sensors402(b): MEMS Sensors402(c): MEMS Sensors402(d): MEMS Sensors404(a): Mechanical Wave Transmitter404(b): Mechanical Wave Transmitter500: Sensing System502(a): MEMS sensors502(b): MEMS Sensors502(c): MEMS Sensors504(a): Mechanical wave transmitters504(b): Mechanical Wave Transmitter506: Transmission Antenna508: Receive Antenna600: Method602: Step604: Step606: Steps608: Steps610: Steps612: Steps702: Frequency grid703: Frequency grid704: Frequency grid706: Low frequency limit708: High frequency limit709: Threshold value710: Gaussian distribution template800: Method802: Steps804: Steps806: Steps808: Steps900: Method902: Steps904: Steps906: Steps908: Steps910: Steps912: Steps
將自附圖中所繪示之實施例之以下更特定描述明白本發明之上述及其他目的、特徵及優點,其中元件符號係指所有各種視圖中之相同部分。圖式未必按比例繪製,而是將重點放在繪示揭示實施例之原理上。The above and other objects, features and advantages of the present invention will be apparent from the following more specific description of the embodiments illustrated in the accompanying drawings, wherein reference numerals refer to like parts throughout the various views. The drawings are not necessarily to scale, emphasis instead being placed upon illustrating the principles of the disclosed embodiments.
圖1展示一微機電系統(MEMS)感測器之一圖式。FIG. 1 shows a schematic diagram of a microelectromechanical system (MEMS) sensor.
圖2展示併入MEMS感測器之一感測系統之一實施例。Figure 2 shows one embodiment of a sensing system incorporating a MEMS sensor.
圖3展示具有一MEMS感測器陣列之一感測系統之一實施例。3 shows one embodiment of a sensing system with a MEMS sensor array.
圖4展示具有一MEMS麥克風陣列及機械波傳輸器之一感測系統之一實施例。Figure 4 shows one embodiment of a sensing system with a MEMS microphone array and mechanical wave transmitter.
圖5展示具有一MEMS感測器陣列、傳輸天線及接收天線之一感測系統之一實施例。5 shows one embodiment of a sensing system having a MEMS sensor array, transmit antennas, and receive antennas.
圖6展示繪示分析由一MEMS感測器接收之一機械波之一實例性方法之一流程圖。6 shows a flowchart illustrating an example method of analyzing a mechanical wave received by a MEMS sensor.
圖7展示繪示分析由一MEMS感測器接收之一機械波之一實例性方法之概念之一曲線圖。7 shows a graph showing a concept of an example method of analyzing a mechanical wave received by a MEMS sensor.
圖8展示繪示分析由一MEMS感測器接收之一機械波之一實例性方法之一流程圖。8 shows a flowchart illustrating an example method of analyzing a mechanical wave received by a MEMS sensor.
圖9展示繪示分析由一MEMS感測器接收之一機械波之一實例性方法之一流程圖。9 shows a flowchart illustrating an example method of analyzing a mechanical wave received by a MEMS sensor.
圖10係繪示一信號處理管線及不同階段中所獲得之特徵的一圖式。10 is a diagram showing a signal processing pipeline and features obtained in different stages.
圖11係繪示時域與對應於多個事件之接收信號之RMSE之間的關係的一圖表。11 is a graph showing the relationship between the time domain and the RMSE of the received signal corresponding to multiple events.
圖12係繪示時域與對應於一單一事件之接收信號之RMSE之間的關係的一圖表。12 is a graph showing the relationship between the time domain and the RMSE of the received signal corresponding to a single event.
200:感測系統200: Sensing System
201:基板201: Substrate
202:微機電系統(MEMS)感測器202: Micro-Electro-Mechanical Systems (MEMS) Sensors
203:處理器203: Processor
Claims (20)
Translated fromChineseApplications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US202063013507P | 2020-04-21 | 2020-04-21 | |
| US63/013,507 | 2020-04-21 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| TW202206783Atrue TW202206783A (en) | 2022-02-16 |
Family
ID=78269978
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| TW110114413ATW202206783A (en) | 2020-04-21 | 2021-04-21 | Mems sensing system |
Country Status (2)
| Country | Link |
|---|---|
| TW (1) | TW202206783A (en) |
| WO (1) | WO2021216631A2 (en) |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8157730B2 (en)* | 2006-12-19 | 2012-04-17 | Valencell, Inc. | Physiological and environmental monitoring systems and methods |
| US9588582B2 (en)* | 2013-09-17 | 2017-03-07 | Medibotics Llc | Motion recognition clothing (TM) with two different sets of tubes spanning a body joint |
| US9976924B2 (en)* | 2015-04-20 | 2018-05-22 | Infineon Technologies Ag | System and method for a MEMS sensor |
| WO2017093814A1 (en)* | 2015-12-04 | 2017-06-08 | Uti Limited Partnership | Wearable inertial electronic device |
| EP3694401A4 (en)* | 2017-10-10 | 2021-05-12 | Sparta Software Corporation | Wearable computing devices for acquiring athletic movement data, and systems and methods relating thereto |
- 2021
- 2021-04-21TWTW110114413Apatent/TW202206783A/enunknown
- 2021-04-21WOPCT/US2021/028285patent/WO2021216631A2/ennot_activeCeased
Also Published As
| Publication number | Publication date |
|---|---|
| WO2021216631A3 (en) | 2021-12-02 |
| WO2021216631A2 (en) | 2021-10-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10860132B2 (en) | Identifying a contact type | |
| JP2017138999A5 (en) | ||
| EP2064698B1 (en) | A method and a system for providing sound generation instructions | |
| Franceschini et al. | Hand gesture recognition via radar sensors and convolutional neural networks | |
| EP2544077A1 (en) | Method and apparatus for providing user interface using acoustic signal, and device including user interface | |
| US20090030628A1 (en) | Signal analyser | |
| Shkel et al. | Continuous health monitoring with resonant-microphone-array-based wearable stethoscope | |
| CN106710602A (en) | Acoustic reverberation time estimation method and device | |
| Ali et al. | Fine-grained vibration based sensing using a smartphone | |
| Wisniewski et al. | Application of tonal index to pulmonary wheezes detection in asthma monitoring | |
| Chen et al. | A portable phonocardiographic fetal heart rate monitor | |
| CN114617543B (en) | A method and device for identifying respiratory monitoring | |
| US12025486B2 (en) | MEMS sensing system | |
| TW202206783A (en) | Mems sensing system | |
| US20240143164A1 (en) | Leveraging Surface Acoustic Wave For Detecting Gestures | |
| JP2009115735A (en) | Distance measuring device, distance measuring method, distance measuring program, and recording medium | |
| CN109682958B (en) | Acceleration sensor signal compensation method for thrombelastogram instrument | |
| Song et al. | Passive acoustic maternal abdominal fetal heart rate monitoring using wavelet transform | |
| JP2014071823A (en) | Information input device, specific frequency extraction method, and specific frequency extraction program | |
| Wisniewski et al. | Fast and robust method for wheezes recognition in remote asthma monitoring | |
| Yudaningtyas et al. | Electret condenser microphone as sensor in arterial pulse recording device | |
| JP2020092782A (en) | Respiratory cycle measuring device and respiratory cycle measuring program | |
| CN113703568B (en) | Gesture recognition method, gesture recognition device, gesture recognition system, and storage medium | |
| JP2017097214A (en) | Signal processor, signal processing method and computer program | |
| Watanabe et al. | Gesture recognition method based on ultrasound propagation in body |