TW202008778A - Image display system and image display method - Google Patents
Image display system and image display methodDownload PDFInfo
- Publication number
- TW202008778A TW202008778ATW107126892ATW107126892ATW202008778ATW 202008778 ATW202008778 ATW 202008778ATW 107126892 ATW107126892 ATW 107126892ATW 107126892 ATW107126892 ATW 107126892ATW 202008778 ATW202008778 ATW 202008778A
- Authority
- TW
- Taiwan
- Prior art keywords
- image
- indoor
- window
- dimensional house
- model
- Prior art date
Links
- 238000000034methodMethods0.000titleclaimsabstractdescription23
- 238000009877renderingMethods0.000claimsdescription2
- 101150013335img1 geneProteins0.000description30
- 238000010586diagramMethods0.000description12
- 101150071665img2 geneProteins0.000description4
- 239000000284extractSubstances0.000description3
- 239000004973liquid crystal related substanceSubstances0.000description2
- 206010040007Sense of oppressionDiseases0.000description1
- 230000003190augmentative effectEffects0.000description1
- 238000004364calculation methodMethods0.000description1
- 238000010276constructionMethods0.000description1
- 238000005034decorationMethods0.000description1
- 230000000694effectsEffects0.000description1
- 238000005516engineering processMethods0.000description1
- 238000012986modificationMethods0.000description1
- 230000004048modificationEffects0.000description1
Images






Landscapes
- Processing Or Creating Images (AREA)
Abstract
Description
Translated fromChinese本發明是有關於一種影像顯示方法,且特別是有關於一種可模擬室內影像的影像顯示系統與影像顯示方法。The present invention relates to an image display method, and particularly to an image display system and image display method that can simulate indoor images.
建商在販售預售屋時常會設立展售中心或接待中心來向客戶展示房屋的環境、建造方式或內外空間等等。一般來說,在製作預售屋模型時建商常會把預售屋隔壁的鄰地以綠地的方式呈現。然而,預售屋隔壁的鄰地可能是同期建案的另一棟大樓、加油站、電塔甚至是墓地,這些可能性都會成為購屋者心中的疑慮。When selling pre-sale houses, builders often set up exhibition and sales centers or reception centers to show customers the environment, construction methods, internal and external spaces, and so on. Generally speaking, when making a pre-sale house model, the builder often presents the neighboring land next to the pre-sale house as a green space. However, the neighboring area next to the pre-sale house may be another building, gas station, electric tower or even a cemetery built during the same period. These possibilities will all become doubts in the minds of home buyers.
除了周圍環境之外,房屋實際建成後的高度、窗外景色與採光都是重要的考量。舉例來說,實際建成後的房屋高度與窗外景色可能與鄰房的棟距有關,而棟距過近容易產生壓迫感。此外,好的採光會提升整體室內的好感度,而不好的採光可能會導致光線不充足或西曬等問題。因此,一種能夠表現出房屋實際建成後,使用者在屋內真實感受的系統,是房屋的買賣雙方所共同追求的目標。In addition to the surrounding environment, the height of the house after the actual completion, the scenery outside the window and the lighting are all important considerations. For example, the height of the house after the actual completion and the scenery outside the window may be related to the distance between the adjacent buildings, and the distance between the buildings is too close to easily produce a sense of oppression. In addition, good lighting will increase the overall favorability of the room, and poor lighting may cause problems such as insufficient light or western sunlight. Therefore, a system that can show the real feelings of the user in the house after the house is actually built is the goal pursued by both the buyer and seller of the house.
有鑑於此,本發明提供一種影像顯示系統與影像顯示方法,能夠模擬出真實的室內影像。In view of this, the present invention provides an image display system and an image display method, which can simulate a real indoor image.
本發明的影像顯示系統,包括控制裝置、影像擷取裝置、處理器以及顯示器。控制裝置取得控制訊號。影像擷取裝置耦接於控制裝置,並根據控制訊號移動至觀察點並且在觀察點擷取第一影像。處理器耦接於影像擷取裝置,並根據立體房屋室內模型、立體房屋室內模型中對應觀察點的觀察位置以及第一影像產生室內影像。顯示器耦接於處理器並顯示室內影像。其中,觀察點與立體房屋室內模型中的觀察位置是同步移動。The image display system of the present invention includes a control device, an image capturing device, a processor and a display. The control device obtains the control signal. The image capturing device is coupled to the control device, and moves to the observation point according to the control signal and captures the first image at the observation point. The processor is coupled to the image capturing device, and generates an indoor image according to the three-dimensional house indoor model, the observation position of the corresponding observation point in the three-dimensional house indoor model, and the first image. The display is coupled to the processor and displays indoor images. Among them, the observation point and the observation position in the indoor model of the three-dimensional house move synchronously.
在本發明的一實施例中,上述的室內影像包括窗戶影像以及非窗戶影像,窗戶影像對應於第一影像,而非窗戶影像對應於立體房屋室內模型。In an embodiment of the invention, the indoor image includes a window image and a non-window image, the window image corresponds to the first image, and the non-window image corresponds to the three-dimensional house indoor model.
在本發明的一實施例中,上述的處理器在產生室內影像時,根據立體房屋室內模型中的窗戶位置以及觀察位置決定立體房屋室內模型的窗戶視野部分與非窗戶視野部分,根據第一影像產生窗戶影像,並且根據非窗戶視野部分產生非窗戶影像。In an embodiment of the present invention, when the above-mentioned processor generates an indoor image, the window view portion and the non-window view portion of the three-dimensional house indoor model are determined according to the window position and the observation position in the three-dimensional house indoor model, based on the first image A window image is generated, and a non-window image is generated based on the non-window field of view.
在本發明的一實施例中,上述的處理器根據時間資訊、影像擷取裝置的當前位置以及立體房屋室內模型中的窗戶位置將室內光線渲染於室內影像中。In an embodiment of the present invention, the aforementioned processor renders the indoor light in the indoor image based on the time information, the current position of the image capturing device, and the window position in the indoor model of the three-dimensional house.
在本發明的一實施例中,上述的控制訊號包括對應觀察點的位置參數以及對應視線角度的角度參數。控制裝置包括定位裝置以及方向感測器,其中定位裝置用以取得位置參數,並且方向感測器用以取得角度參數。In an embodiment of the invention, the above control signal includes a position parameter corresponding to the observation point and an angle parameter corresponding to the line-of-sight angle. The control device includes a positioning device and a direction sensor, wherein the positioning device is used to obtain a position parameter, and the direction sensor is used to obtain an angle parameter.
在本發明的一實施例中,當處理器判斷第一影像中包括另一影像擷取裝置,處理器根據所述另一影像擷取裝置在第一影像中的位置將虛擬人物渲染於室內影像中。In an embodiment of the present invention, when the processor determines that the first image includes another image capturing device, the processor renders the virtual character in the indoor image according to the position of the another image capturing device in the first image in.
本發明的影像顯示方法包括以下步驟:取得控制訊號;根據控制訊號控制影像擷取裝置移動至觀察點;利用影像擷取裝置在觀察點擷取第一影像;根據立體房屋室內模型、立體房屋室內模型中對應觀察點的觀察位置以及第一影像產生室內影像,其中觀察點與觀察位置同步移動;以及顯示室內影像。The image display method of the present invention includes the following steps: obtaining a control signal; controlling the image capturing device to move to the observation point according to the control signal; using the image capturing device to capture the first image at the observation point; according to the three-dimensional house interior model, the three-dimensional house interior The observation position and the first image of the corresponding observation point in the model generate an indoor image, wherein the observation point moves synchronously with the observation position; and the indoor image is displayed.
在本發明的一實施例中,上述的室內影像包括窗戶影像以及非窗戶影像,窗戶影像對應於第一影像,並且非窗戶影像對應於立體房屋室內模型。In an embodiment of the present invention, the indoor image includes a window image and a non-window image, the window image corresponds to the first image, and the non-window image corresponds to the indoor model of the three-dimensional house.
在本發明的一實施例中,上述的根據立體房屋室內模型、立體房屋室內模型中對應觀察點的觀察位置以及第一影像產生室內影像的步驟包括:根據立體房屋室內模型中的窗戶位置以及觀察位置決定立體房屋室內模型的窗戶視野部分與非窗戶視野部分;根據第一影像產生窗戶影像;以及根據非窗戶視野部分產生非窗戶影像。In an embodiment of the present invention, the step of generating an indoor image based on the three-dimensional house indoor model, the observation position of the corresponding observation point in the three-dimensional house indoor model, and the first image includes: according to the window position and observation in the three-dimensional house indoor model The position determines the window view portion and the non-window view portion of the three-dimensional house interior model; the window image is generated based on the first image; and the non-window image is generated based on the non-window view portion.
在本發明的一實施例中,上述的影像顯示方法更包括:根據時間資訊、影像擷取裝置的當前位置以及立體房屋室內模型中的窗戶位置將室內光線渲染於該室內影像中。In an embodiment of the invention, the above image display method further includes: rendering indoor light in the indoor image based on time information, the current position of the image capture device, and the window position in the indoor model of the three-dimensional house.
在本發明的一實施例中,上述的控制訊號包括對應觀察點的位置參數以及對應視線角度的角度參數,其中取得控制訊號的步驟包括:利用定位裝置取得位置參數;以及利用方向感測器取得角度參數。In an embodiment of the invention, the above control signal includes a position parameter corresponding to the observation point and an angle parameter corresponding to the line-of-sight angle, wherein the step of obtaining the control signal includes: using a positioning device to obtain the position parameter; and using a direction sensor to obtain Angle parameter.
在本發明的一實施例中,上述的影像顯示方法更包括:判斷第一影像中是否包括另一影像擷取裝置;以及當第一影像中包括另一影像擷取裝置,根據所述另一影像擷取裝置在第一影像中的位置將虛擬人物渲染於室內影像中。In an embodiment of the invention, the above image display method further includes: determining whether the first image includes another image capturing device; and when the first image includes another image capturing device, according to the other The position of the image capturing device in the first image renders the virtual character in the indoor image.
基於上述,本發明實施例所提出的影像顯示系統與影像顯示方法利用控制裝置來控制影像擷取裝置取得觀察點的實際影像,在合成實際影像與立體房屋室內模型以產生室內影像。據此,能夠模擬出在觀察點看到的實際景象。Based on the above, the image display system and the image display method proposed in the embodiments of the present invention use the control device to control the image capture device to obtain the actual image of the observation point, and then synthesize the actual image and the three-dimensional house indoor model to generate the indoor image. According to this, the actual scene seen at the observation point can be simulated.
為讓本發明的上述特徵和優點能更明顯易懂,下文特舉實施例,並配合所附圖式作詳細說明如下。In order to make the above-mentioned features and advantages of the present invention more obvious and understandable, the embodiments are specifically described below in conjunction with the accompanying drawings for detailed description as follows.
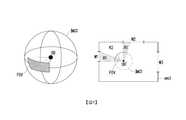
圖1繪示本發明一實施例中影像顯示系統的概要方塊圖;圖2繪示本發明一實施例中影像顯示系統的使用情境示意圖。FIG. 1 is a schematic block diagram of an image display system in an embodiment of the present invention; FIG. 2 is a schematic diagram of usage scenarios of the image display system in an embodiment of the present invention.
請參照圖1與圖2,影像顯示系統100包括控制裝置110、影像擷取裝置120、處理器130以及顯示器140。在一些實施例中,控制裝置110、處理器130以及顯示器140位於展售中心SC,影像擷取裝置120位於建築預定地BD_RSV上方。使用者USR可在展售中心SC透過控制裝置110來控制其在模擬蓋好後的預售屋(例如採三維建模方式,以建立立體房屋)中的觀察位置與視線角度,透過影像擷取裝置120與處理器130的協作,顯示器140會對應地顯示出在蓋好後的預售屋中,從所述觀察位置與視線角度所能觀看到的室內影像。由於立體房屋室內模型可以包括不同的室內裝潢,且具體應用可根據實際情況進行配置,並可用不同方式取得,故在此不贅述。然而,本發明並不限於上述實施例的使用情境。1 and 2, the
控制裝置110耦接於影像擷取裝置120,用以接收和傳送控制訊號S,以控制影像擷取裝置120移動到指定的觀察點來拍攝影像。在一些實施例中,控制訊號S包括用以控制使用者USR所欲觀看的位置的位置參數,位置參數例如包括樓層參數與屋內觀察位置的二維座標參數等。當使用者USR透過控制裝置110輸入樓層參數來調整其所欲觀看的樓層時,影像擷取裝置120會移動到建築預定地BD_RSV上方對應於該樓層的高度;當使用者USR透過控制裝置110輸入座標參數來在特定樓層中移動觀察位置時,影像擷取裝置120會固定高度地在建築預定地BD_RSV上方對應地平移位置。在一些實施例中,控制訊號S更包括用以控制使用者USR的視線角度的角度參數。當使用者USR透過控制裝置110輸入角度參數來調整其所欲觀看的視線角度時,影像擷取裝置120則會對應地轉動。然而,本發明並不在此限制用以控制影像擷取裝置120移動或轉動的控制參數的具體型式。在其他實施例中,控制訊號S亦可例如是僅包括一個經度、緯度與高度的三維座標參數。The
在一些實施例中,控制裝置110包括輸入裝置,例如鍵盤、滑鼠、搖桿、麥克風或觸控式螢幕等,使用者USR可使用輸入裝置來控制其所欲觀看的樓層、觀察位置或視線角度,而影像擷取裝置120則會對應地移動或轉動。In some embodiments, the
在一些實施例中,控制裝置110包括定位裝置以及方向感測器等,其中定位裝置用以偵測使用者USR在展售中心SC中的位置與高度,而方向感測器用以偵測使用者USR的朝向(orientation)。在一些實施例中,定位裝置例如是包括設置在展售中心的多個影像擷取裝置以及處理器,藉由多個影像擷取裝置所擷取包括使用者USR的影像以及各個影像擷取裝置的位置,處理器便能夠計算得到使用者USR在展售中心SC中的位置與高度,以取得位置參數。舉例來說,當使用者USR在展售中心SC從樓層F1移動到樓層F2時,定位裝置可以取得位置參數,進而控制影像擷取裝置120從對應於樓層F1的高度移動到對應於樓層F2的高度。在一些實施例中,方向感測器例如是以陀螺儀來實作,當使用者將方向感測器配戴在身上並旋轉時,陀螺儀便能夠取得角度參數。在一些實施例中,定位裝置與方向感測器例如是以九軸感測器來實作,當使用者USR將九軸感測器配戴在身上並在展售中心SC中移動或轉動時,九軸感測器便能夠根據使用者USR的移動或轉動來提供位置參數或角度參數。然而,本發明並不限於此。In some embodiments, the
影像擷取裝置120耦接於處理器130,用以取得其視野範圍內的影像,並且將其所取得的影像傳送至處理器130。在一些實施例中,影像擷取裝置120例如以無人機來實作,無人機受控制裝置110的控制而可移動到指定的觀察點OB以在該處取得影像。在一些實施例中,影像擷取裝置120例如是以無人機搭載全景攝像機,用以根據控制訊號移動到指定觀察點OB取得全視角影像。而在一些實施例中,例如可以是以無人機搭載旋轉平台與非全景攝像機,用以根據控制訊號移動到指定觀察點OB,並且轉動到指定角度來取得非全視角的影像。The
處理器130耦接於顯示器140,其可例如是中央處理單元(Central Processing Unit,CPU),或是其他可程式化之一般用途或特殊用途的微處理器(Microprocessor)、數位訊號處理器(Digital Signal Processor,DSP)、可程式化控制器、特殊應用積體電路(Application Specific Integrated Circuits,ASIC)、可程式化邏輯裝置(Programmable Logic Device,PLD)或其他類似裝置或這些裝置的組合,用以接收來自影像擷取裝置120的影像,並且進行計算以將該影像與立體房屋室內模型進行結合,以模擬出較貼近真實環境的室內影像。The
顯示器140包括多個顯示像素,其例如是液晶顯示器(Liquid-Crystal Display,LCD)、發光二極體(Light-Emitting Diode,LED)顯示器或其他合適種類的顯示器,用以接收來自處理器130的訊號以顯示二維或三維的室內影像,本發明不在此限。The
在一些實施例中,控制裝置100、影像擷取裝置120、處理器130以及顯示器140例如分別實作成獨立的裝置。在一些實施例中,顯示器140例如是與控制裝置110、處理器130整合來實作為移動式電子裝置,例如,以智慧型手機的應用程式來實作。在一些實施例中,顯示器140例如是與控制裝置110整合來實作為頭戴式顯示器,例如,將九軸感測器整合在頭戴式顯示器中。然而,本發明並不限制影像顯示系統100的具體實作方式。In some embodiments, the
圖3繪示本發明一實施例中影像顯示方法的流程圖。FIG. 3 is a flowchart of an image display method in an embodiment of the invention.
圖3實施例中的影像顯示方法可藉由圖1實施例中的影像顯示系統100的各項元件來協作完成,故以下將引用影像顯示系統100的各項元件來說明本實施例的影像顯示方法。The image display method in the embodiment of FIG. 3 can be completed by the various components of the
在步驟S110中,控制裝置110會收發控制訊號S。控制裝置110取得控制訊號S的細節已於前述段落舉實施例說明,故以下不再重複贅述。在步驟S120中,影像擷取裝置120會根據控制訊號S移動至觀察點OB,並且在步驟S130中,影像擷取裝置120會在觀察點OB擷取第一影像IMG1。在步驟S140中,處理器130會根據立體房屋室內模型、立體房屋室內模型中對應觀察點OB的觀察位置OB’以及第一影像IMG1來產生結合室外真實環境影像的室內影像。在步驟S150中,顯示器140會顯示該室內影像,以讓使用者USR能看到更貼近真實的樣貌。In step S110, the
在一些實施例中,立體房屋室內模型例如是不包括家具或擺設的室內格局的立體模型。在一些實施例中,立體房屋室內模型例如是包括家具及擺設的立體模型。值得一提的是,本發明並不在此限制立體房屋室內模型的細節與來源,應用本發明者可依其需求來實作之。舉例而言,立體房屋室內模型可以是唯一記錄在儲存裝置(未繪示)中,也可以是對應於不同位置參數而記錄有多個立體房屋室內模型在儲存裝置中。例如,多個第一位置參數對應於第一立體房屋室內模型,而多個第二位置參數對應於第二立體房屋室內模型等等。舉另一例而言,立體房屋室內模型可以是處理器130透過網路模組(未繪示)來下載得到。In some embodiments, the three-dimensional house interior model is, for example, a three-dimensional model that does not include furniture or furnishings. In some embodiments, the three-dimensional house interior model is, for example, a three-dimensional model including furniture and furnishings. It is worth mentioning that the present invention does not limit the details and sources of the interior model of the three-dimensional house here, and the present inventors can implement it according to their needs. For example, the indoor model of the three-dimensional house may be uniquely recorded in the storage device (not shown), or a plurality of indoor models of the three-dimensional house may be recorded in the storage device corresponding to different location parameters. For example, multiple first position parameters correspond to the first three-dimensional house indoor model, while multiple second position parameters correspond to the second three-dimensional house indoor model, and so on. For another example, the interior model of the three-dimensional house may be downloaded by the
此外,值得一提的是,指定的觀察點OB對應於在立體房屋室內模型中的觀察位置OB’。舉例來說,當觀察點OB位於預售屋蓋好後,樓層F2的大門入口時,觀察位置OB’會位於對應樓層F2的立體房屋室內模型中的大門入口處。此外,使用者USR在透過控制裝置110控制立體房屋室內模型中的觀察位置OB’時,影像擷取裝置120會跟著移動到對應的觀察點OB。因此,在立體房屋室內模型中的觀察位置OB’與觀察點OB是同步地移動。In addition, it is worth mentioning that the designated observation point OB corresponds to the observation position OB' in the indoor model of the three-dimensional house. For example, when the observation point OB is located at the gate entrance of the floor F2 after the pre-sale roof is built, the observation position OB' will be located at the gate entrance in the interior model of the three-dimensional house corresponding to the floor F2. In addition, when the user USR controls the observation position OB' in the indoor model of the three-dimensional house through the
以下將舉實施例說明處理器130產生室內影像的方式。為了方便表示,圖 4到圖6中將以二維的橫切面來表示立體房屋室內模型。Hereinafter, an embodiment will be used to describe the manner in which the
圖4繪示本發明一實施例中產生室內影像的示意圖。FIG. 4 illustrates a schematic diagram of generating indoor images in an embodiment of the invention.
在一些實施例中,影像擷取裝置120例如搭載全景攝像機的無人機。影像擷取裝置120會根據控制訊號S移動到指定的觀察點OB擷取全視角影像作為第一影像IMG1。In some embodiments, the
如圖4所示,處理器130例如根據立體房屋室內模型sect中的觀察位置OB’與窗戶位置W1、W2、W3,將立體房屋室內模型sect區分為窗戶視野部份R1與非窗戶視野部份R2。詳細來說,在觀察位置OB’朝向窗戶視野部分R1的任一處看去的視線都能夠看到窗戶位置W1、W2、W3,而不會被其他障礙物所阻擋;而在觀察位置OB’朝向非窗戶視野部分R2的任一處看去的視線都無法看到窗戶位置W1、W2、W3,可能是因為該方向沒有窗戶或是被立體房屋室內模型的家具、擺設或格局所阻擋。隨後,處理器130會計算觀察點OB與觀察位置OB’重合,且第一影像IMG1的朝向對齊立體房屋室內模型sect的朝向時,將非窗戶視野部分R2投影並疊加到第一影像IMG1上所產生的第二影像IMG2。更明確地說,所產生的第二影像IMG2也是全視角影像,且其中包括原第一影像IMG1所構成的窗戶影像以及立體房屋室內模型sect的非窗戶視野部分所構成的非窗戶影像。接著,處理器130會根據控制訊號S中的角度參數,來從第二影像IMG2中擷取出對應於視野範圍FOV的部分影像以作為室內影像,以提供顯示器140來顯示。As shown in FIG. 4, the
明確地說,上述的視野範圍FOV例如是顯示器140所顯示的室內影像的視野範圍。因此,視野範圍FOV的尺寸是關聯於顯示器140的規格,而視野範圍FOV的方向則是關聯於角度參數。如此一來,使用者可以藉由調整角度參數來控制視野範圍FOV的方向,進而看到不同的室內影像。Specifically, the aforementioned field of view FOV is, for example, the field of view of the indoor video displayed on the
圖5繪示本發明第二實施例中產生室內影像的示意圖。FIG. 5 illustrates a schematic diagram of generating indoor images in the second embodiment of the present invention.
在一些實施例中,影像擷取裝置120例如為搭載全景攝像機的無人機。影像擷取裝置120會根據控制訊號S移動到指定的觀察點OB擷取全視角影像作為第一影像IMG1。In some embodiments, the
如圖5所示,處理器130例如會先根據控制訊號S中的角度參數,來從第一影像IMG1中擷取出對應於視野範圍FOV的部分影像。隨後,將觀察點OB與觀察位置OB’重合,並且使第一影像IMG1的朝向對齊立體房屋室內模型sect的朝向後,再根據立體房屋室內模型sect中的觀察位置OB’、窗戶位置W1、W2、W3以及視野範圍FOV來取得立體房屋室內模型sect的窗戶視野部份R1與非窗戶視野部份R2。最後,將上述的立體房屋室內模型sect的非窗戶視野部分R2投影並疊加到從第一影像IMG1擷取的對應於視野範圍FOV的部分影像上,以形成室內影像,以供顯示器140顯示。詳細來說,室內影像中包括部分的第一影像IMG1所構成的窗戶影像以及立體房屋室內模型sect的非窗戶視野部分R2所構成的非窗戶影像。As shown in FIG. 5, the
圖6繪示本發明第三實施例中產生室內影像的示意圖。FIG. 6 is a schematic diagram of generating indoor images in the third embodiment of the present invention.
在一些實施例中,影像擷取裝置120例如為搭載旋轉平台與非全景的攝像機的無人機。影像擷取裝置120會根據控制訊號S的位置參數移動到指定的觀察點OB,並利用旋轉平台根據控制訊號S的角度參數旋轉到特定角度(例如,使用者USR的視線角度)來擷取非全視角的第一影像IMG1。In some embodiments, the
圖6的非全視角的第一影像IMG1例如相同於圖5實施例中從第一影像IMG1所擷取的對應於視野範圍FOV的部分影像,而圖6中的非全視角的第一影像IMG1的影像範圍則例如為視野範圍FOV。如圖6所示,處理器130會使第一影像IMG1的朝向對齊立體房屋室內模型sect的朝向後,再根據立體房屋室內模型sect中的觀察位置OB’、窗戶位置W1、W2、W3以及視野範圍FOV來取得立體房屋室內模型sect中的窗戶視野部份R1與非窗戶視野部份R2。最後,將上述的立體房屋室內模型sect的非窗戶視野部分R2投影並疊加到第一影像IMG1上,以形成室內影像,以供顯示器140顯示。詳細來說,室內影像中包括部分的第一影像IMG1所構成的窗戶影像以及立體房屋室內模型sect的非窗戶視野部分R2所構成的非窗戶影像。The non-full-view first image IMG1 of FIG. 6 is, for example, the same as the partial image captured from the first image IMG1 in the embodiment of FIG. 5 corresponding to the field of view FOV, and the non-full-view first image IMG1 of FIG. 6 The image range of is for example the field of view FOV. As shown in FIG. 6, the
如此一來,顯示器140能夠同時以立體房屋室內模型來顯示出室內影像中非窗戶影像的部分,以及以影像擷取裝置120所拍攝的第一影像IMG1來顯示出室內影像中窗戶影像的部分。In this way, the
在一些實施例中,在建立室內影像時,處理器130會先根據時間資訊、影像擷取裝置120的當前位置以及立體房屋室內模型中的窗戶位置來將光線渲染於室內影像中。In some embodiments, when creating an indoor image, the
舉例來說,處理器130會根據當前時間或使用者USR所輸入的時間來取得時間資訊,並且根據位置參數或設置於影像擷取裝置120的定位系統(例如但不限於,全球定位系統)來取得影像擷取裝置120的當前位置。據此,處理器130便能夠估算出對應於時間資訊與影像擷取裝置120的當前位置的日照方向,並進一步使用光線追蹤(ray tracing)等演算法來根據日照方向以及立體房屋室內模型中的窗戶位置來將光線渲染於立體房屋室內模型中,例如改變立體房屋室內模型的色溫、產生立體房屋室內模型中的光影等等。接著,處理器130可例如再根據圖4至圖6實施例所介紹的方法,來使用加入光線後的立體房屋室內模型產生室內影像,以貼近真實的日照情況。For example, the
在一些實施例中,處理器130更判斷影像擷取裝置110 所拍攝的第一影像IMG1中是否有其他影像擷取裝置。若有,則根據第一影像IMG1中的其他影像擷取裝置在第一影像IMG1中的位置,決定是否將虛擬人物渲染於室內影像中。In some embodiments, the
圖7繪示本發明一實施例中影像擷取裝置拍攝到另一影像擷取裝置的示意圖。7 is a schematic diagram of another image capturing device captured by the image capturing device in an embodiment of the invention.
請參照圖7,當影像擷取裝置120所拍攝的第一影像IMG1中出現另一台影像擷取裝置120’時,表示可能有另一個使用者USR’也正在觀看對應同一個建築預定地BD_RSV的房屋的室內影像,也就是有另外一個使用者USR’也一起在看同一間房屋。Please refer to FIG. 7, when another image capturing device 120' appears in the first image IMG1 captured by the
因此,在一些實施例中,處理器130例如會判斷所述另一台影像擷取裝置120’是否進入第一影像IMG1中對應視野範圍FOV的部分,若是,則在室內影像中對應所述另一台影像擷取裝置120’的位置渲染上虛擬人物,以覆蓋另一台影像擷取裝置120’的影像並且模擬出其他使用者正在一起看屋的效果。Therefore, in some embodiments, the
以圖4實施例為例,如前段落所述,處理器130例如會根據控制訊號S中的角度參數來擷取出第一影像IMG1中對應於視野範圍FOV的部分。當另一影像擷取裝置120’ 出現在全視角的第一影像IMG1的某一位置,且此位置位於第一影像IMG1中對應於視野範圍FOV的部分內(例如,第一影像IMG1中對應於視野範圍FOV部分的正中央),處理器130便會根據所述另一影像擷取裝置120’在第一影像IMG1中的位置,將虛擬人物渲染到室內影像中對應的位置(例如,室內影像的正中央)。Taking the embodiment of FIG. 4 as an example, as described in the previous paragraph, the
綜上所述,本發明實施例所提出的影像顯示系統與影像顯示方法利用控制裝置來控制影像擷取裝置取得觀察點的實際影像,再合成實際影像與立體房屋室內模型以產生室內影像,因此能夠模擬出在觀察點看到的實際景象。在本發明的一些實施例中,更根據當前的日照資訊將窗外的光線渲染到室內影像中,以模擬出更加真實地具光影的室內影像。此外,在本發明的一些實施例中,更將所拍攝到的另一台影像擷取裝置模擬為虛擬人物,因此能夠避免在室內影像中突兀地出現另一台影像擷取裝置,使室內影像更加自然。基於本發明的數個實施例,消費者得以享受由擴增實境(Augmented Reality,AR)技術來實現的「遠端看屋」的良好體驗。In summary, the image display system and the image display method proposed in the embodiments of the present invention use the control device to control the image capture device to obtain the actual image of the observation point, and then synthesize the actual image and the three-dimensional house indoor model to generate the indoor image, so Can simulate the actual scene seen at the observation point. In some embodiments of the present invention, the light outside the window is rendered into the indoor image according to the current sunshine information, so as to simulate a more realistic indoor image with light and shadow. In addition, in some embodiments of the present invention, the captured another image capture device is simulated as a virtual person, so it is possible to avoid the abrupt appearance of another image capture device in the indoor image, so that the indoor image More natural. Based on several embodiments of the present invention, consumers can enjoy the good experience of "remote viewing of houses" realized by Augmented Reality (AR) technology.
雖然本發明已以實施例揭露如上,然其並非用以限定本發明,任何所屬技術領域中具有通常知識者,在不脫離本發明的精神和範圍內,當可作些許的更動與潤飾,故本發明的保護範圍當視後附的申請專利範圍所界定者為準。Although the present invention has been disclosed as above with examples, it is not intended to limit the present invention. Any person with ordinary knowledge in the technical field can make some changes and modifications without departing from the spirit and scope of the present invention. The scope of protection of the present invention shall be subject to the scope defined in the appended patent application.
100‧‧‧影像顯示裝置110‧‧‧控制裝置120、120’‧‧‧影像擷取裝置130‧‧‧處理器140‧‧‧顯示器BD_RSV‧‧‧建築預定地F1、F2‧‧‧樓層FOV‧‧‧視野範圍IMG1‧‧‧第一影像IMG2‧‧‧第二影像OB‧‧‧觀察點OB’‧‧‧觀察位置R1‧‧‧立體房屋室內模型的窗戶視野部分R2‧‧‧立體房屋室內模型的非窗戶視野部分S‧‧‧控制訊號sect‧‧‧以橫切面表示的立體房屋室內模型S110、S120、S130、S140、S150‧‧‧影像顯示方法的步驟SC‧‧‧展售中心USR、USR’‧‧‧使用者W1、W2、W3‧‧‧窗戶位置100‧‧‧
圖1繪示本發明一實施例中影像顯示系統的概要方塊圖。 圖2繪示本發明一實施例中影像顯示系統的使用情境示意圖。 圖3繪示本發明一實施例中影像顯示方法的流程圖。 圖4繪示本發明第一實施例中產生室內影像的示意圖。 圖5繪示本發明第二實施例中產生室內影像的示意圖。 圖6繪示本發明第三實施例中產生室內影像的示意圖。 圖7繪示本發明一實施例中影像擷取裝置拍攝到另一影像擷取裝置的示意圖。FIG. 1 is a schematic block diagram of an image display system according to an embodiment of the invention. FIG. 2 is a schematic diagram illustrating the usage situation of the image display system in an embodiment of the invention. FIG. 3 is a flowchart of an image display method in an embodiment of the invention. FIG. 4 is a schematic diagram of generating indoor images in the first embodiment of the present invention. FIG. 5 illustrates a schematic diagram of generating indoor images in the second embodiment of the present invention. FIG. 6 is a schematic diagram of generating indoor images in the third embodiment of the present invention. 7 is a schematic diagram of another image capturing device captured by the image capturing device in an embodiment of the invention.
S110、S120、S130、S140、S150‧‧‧影像顯示方法的步驟S110, S120, S130, S140, S150 ‧‧‧ video display method steps
Claims (12)
Translated fromChinesePriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| TW107126892ATWI721299B (en) | 2018-08-02 | 2018-08-02 | Image display system and image display method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| TW107126892ATWI721299B (en) | 2018-08-02 | 2018-08-02 | Image display system and image display method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| TW202008778Atrue TW202008778A (en) | 2020-02-16 |
| TWI721299B TWI721299B (en) | 2021-03-11 |
Family
ID=70413006
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| TW107126892ATWI721299B (en) | 2018-08-02 | 2018-08-02 | Image display system and image display method |
Country Status (1)
| Country | Link |
|---|---|
| TW (1) | TWI721299B (en) |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TWM527119U (en)* | 2016-01-29 | 2016-08-11 | Sinyi Realty Inc | Layout-based interactive video playback device |
| TWM563713U (en)* | 2017-11-30 | 2018-07-11 | 林淑貞 | House viewing and noting device connected with indoor condition and layout |
- 2018
- 2018-08-02TWTW107126892Apatent/TWI721299B/enactive
Also Published As
| Publication number | Publication date |
|---|---|
| TWI721299B (en) | 2021-03-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2020035392A (en) | Remote communication system and the like | |
| JP4804256B2 (en) | Information processing method | |
| US20170230633A1 (en) | Method and apparatus for generating projection image, method for mapping between image pixel and depth value | |
| CN110382066A (en) | Mixed reality viewer system and method | |
| US20210038975A1 (en) | Calibration to be used in an augmented reality method and system | |
| JP7073481B2 (en) | Image display system | |
| CN111602100A (en) | Methods, apparatus and systems for providing an alternate reality environment | |
| US20220114792A1 (en) | Mixed reality display device and mixed reality display method | |
| WO2018113759A1 (en) | Detection system and detection method based on positioning system and ar/mr | |
| JP2025131915A (en) | Image processing method, program, and image processing system | |
| US10296080B2 (en) | Systems and methods to simulate user presence in a real-world three-dimensional space | |
| US12148331B2 (en) | Content generation method, content projection method, program, and content generation system | |
| JP2015099545A (en) | Image generation system and image generation program | |
| US10391408B2 (en) | Systems and methods to facilitate user interactions with virtual objects depicted as being present in a real-world space | |
| WO2020262391A1 (en) | Display control device, display control method, and program | |
| WO2023277020A1 (en) | Image display system and image display method | |
| CN110682309B (en) | Room viewing system and robot for viewing room | |
| JP2020530218A (en) | How to project immersive audiovisual content | |
| TWI721299B (en) | Image display system and image display method | |
| Wang et al. | An intelligent screen system for context-related scenery viewing in smart home | |
| US20240316461A1 (en) | Using laser to align a virtual environment in a game engine | |
| US11310472B2 (en) | Information processing device and image generation method for projecting a subject image onto a virtual screen | |
| US12120287B2 (en) | Multi-person mixed reality experience, method and apparatus | |
| US20240394987A1 (en) | Selfie volumetric video | |
| KR101873681B1 (en) | System and method for virtual viewing based aerial photography information |