RU2353426C2 - Method and system for accurate measurement of liquid in pipette for liquid sampling - Google Patents
Method and system for accurate measurement of liquid in pipette for liquid samplingDownload PDFInfo
- Publication number
- RU2353426C2 RU2353426C2RU2006122511/04ARU2006122511ARU2353426C2RU 2353426 C2RU2353426 C2RU 2353426C2RU 2006122511/04 ARU2006122511/04 ARU 2006122511/04ARU 2006122511 ARU2006122511 ARU 2006122511ARU 2353426 C2RU2353426 C2RU 2353426C2
- Authority
- RU
- Russia
- Prior art keywords
- volume
- pipette
- liquid
- calibration
- fluid
- Prior art date
Links
- 239000007788liquidSubstances0.000titleclaimsabstractdescription54
- 238000000034methodMethods0.000titleclaimsabstractdescription46
- 238000005070samplingMethods0.000titleabstractdescription4
- 238000005259measurementMethods0.000titledescription7
- 230000007246mechanismEffects0.000claimsabstractdescription50
- 238000012937correctionMethods0.000claimsabstractdescription41
- 230000008569processEffects0.000claimsabstractdescription18
- 239000012530fluidSubstances0.000claimsdescription54
- 230000001105regulatory effectEffects0.000claimsdescription7
- 230000001276controlling effectEffects0.000claimsdescription5
- 238000006073displacement reactionMethods0.000abstractdescription8
- 238000004519manufacturing processMethods0.000abstractdescription8
- 230000000694effectsEffects0.000abstractdescription4
- 239000000126substanceSubstances0.000abstract1
- 238000004891communicationMethods0.000description12
- 230000006870functionEffects0.000description7
- 230000008859changeEffects0.000description4
- 239000002184metalSubstances0.000description4
- 229920003023plasticPolymers0.000description4
- 238000003825pressingMethods0.000description3
- 239000000523sampleSubstances0.000description3
- 238000011109contaminationMethods0.000description2
- 238000010586diagramMethods0.000description2
- 238000010438heat treatmentMethods0.000description2
- 238000005304joiningMethods0.000description2
- 239000000463materialSubstances0.000description2
- 238000011160researchMethods0.000description2
- 206010057362UnderdoseDiseases0.000description1
- 238000004026adhesive bondingMethods0.000description1
- 230000005540biological transmissionEffects0.000description1
- 230000000295complement effectEffects0.000description1
- 230000006835compressionEffects0.000description1
- 238000007906compressionMethods0.000description1
- 238000009826distributionMethods0.000description1
- 238000009509drug developmentMethods0.000description1
- 238000005516engineering processMethods0.000description1
- 230000007613environmental effectEffects0.000description1
- 239000011521glassSubstances0.000description1
- 238000009434installationMethods0.000description1
- 239000006101laboratory sampleSubstances0.000description1
- 238000010295mobile communicationMethods0.000description1
- 238000012986modificationMethods0.000description1
- 230000004048modificationEffects0.000description1
- 238000012545processingMethods0.000description1
- 230000002035prolonged effectEffects0.000description1
- 102000004169proteins and genesHuman genes0.000description1
- 108090000623proteins and genesProteins0.000description1
- 230000005855radiationEffects0.000description1
- 230000004044responseEffects0.000description1
- 238000000926separation methodMethods0.000description1
- 238000005476solderingMethods0.000description1
- 238000003466weldingMethods0.000description1
Images













Landscapes
- Devices For Use In Laboratory Experiments (AREA)
- Sampling And Sample Adjustment (AREA)
Abstract
Description
Translated fromRussianОБЛАСТЬ ИЗОБРЕТЕНИЯFIELD OF THE INVENTION
Настоящее изобретение относится в основном к пипетке для забора и выдачи регулируемых объемов жидкости. Более точно, настоящее изобретение относится к пипетке для взятия проб жидкости для точного измерения объемов жидкости.The present invention relates generally to a pipette for collecting and dispensing controlled volumes of liquid. More specifically, the present invention relates to a liquid sampling pipette for accurately measuring liquid volumes.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯBACKGROUND OF THE INVENTION
В фармацевтических, геномных, белковых исследованиях, биологических исследованиях, в лабораториях по разработке лекарств и других биотехнологических применениях для работы с лабораторными пробами во множестве лабораторных процедур используется пипетка для жидкости. При использовании пипетки в нее набирают объем жидкости. Этот объем жидкости может затем выдаваться в виде одного или нескольких выдаваемых объемов. Забором и выдачей жидкости в определенных объемах управляет приводной механизм поршня посредством передачи движения поршневому узлу. Пипетка может работать в ручном режиме, когда пользователь вручную управляет скоростью и объемом взятия или выдачи жидкости, используя чувствительную к давлению рукоятку. В альтернативном случае пипетка может работать в режиме с электроприводом, когда забором и выдачей жидкости управляет двигатель. В любом режиме пипетка может иметь электронные составные части, которые, например, отображают на дисплее требуемый объем для взятия жидкости. Пользователь может выбирать различные параметры, включая скорость, объем, число заборов жидкости, число выдачи жидкости и т.д., используя дисплей, выполненный на пипетке. Движение штока поршня управляется давлением, сообщаемым приводным механизмом поршня. В пипетке с электроприводом движение штока поршня обычно управляется небольшим процессором, помещенным в корпусе пипетки.In pharmaceutical, genomic, protein research, biological research, drug development laboratories and other biotechnological applications, a liquid dropper is used in many laboratory procedures to work with laboratory samples. When using a pipette, a volume of liquid is drawn into it. This volume of liquid may then be dispensed as one or more dispensed volumes. The intake and delivery of fluid in certain volumes is controlled by the piston drive mechanism by transmitting movement to the piston assembly. The pipette can be operated in manual mode, when the user manually controls the speed and volume of fluid intake or delivery using a pressure-sensitive handle. Alternatively, the pipette may operate in an electric drive mode when the motor controls the intake and delivery of liquid. In any mode, the pipette may have electronic components, which, for example, display the required volume for liquid collection on the display. The user can select various parameters, including speed, volume, number of fluid intake, number of fluid delivery, etc., using a display made on a pipette. The movement of the piston rod is controlled by the pressure imparted by the piston drive mechanism. In an electrically driven pipette, the movement of the piston rod is usually controlled by a small processor placed in the pipette body.
В пипетке с электроприводом или без электропривода ошибки в количестве жидкости, в действительности определяемом пипеткой, базируются на ряде эффектов. Один из наблюдаемых эффектов имеет место, когда для взятия требуется малый объем. Взятый в действительности объем больше, чем требуемый объем. Для проб малого объема ошибка происходит благодаря явлению капиллярности.In a pipette with or without an electric actuator, errors in the amount of liquid actually determined by the pipette are based on a number of effects. One of the observed effects occurs when a small volume is required to capture. The actual volume taken is greater than the required volume. For samples of small volume, an error occurs due to the phenomenon of capillarity.
Наоборот, для требуемых больших объемов жидкости объем, взятый в действительности, меньше требуемого. Для проб больших объемов ошибка происходит из-за веса столба жидкости, который сжимает жидкость. Кроме того, ошибки могут быть обусловлены различием между текущей рабочей температурой пипетки и температурой при калибровке пипетки. Например, после продолжительной работы пользователем происходит нагревание пипетки. Нагревание пипетки вызывает расширение составных частей, которые регулируют количество забираемой или выдаваемой жидкости, вызывая ошибки в требуемом объеме забираемой жидкости. В холодной пипетке составные части уменьшаются в объеме. Еще дополнительные ошибки основываются на текущих атмосферных условиях, в которых находится пипетка и которые отличаются от атмосферных условий, имевших место при калибровке. Например, температура, давление и/или влажность атмосферы, при которых работает пипетка, могут отличаться от атмосферных параметров, сопутствовавших калибровке пипетки. Поэтому необходим способ корректировки в зависимости от текущих физических параметров пипетки и/или текущего требуемого объема, обеспечивающий точную регулировку требуемого объема жидкости в пипетке, работающей с жидкостью. Кроме того, необходим способ повышения точности пипетки, позволяющий уменьшить стоимость пипетки и упростить ее изготовление.On the contrary, for the required large volumes of liquid, the volume taken in reality is less than the required. For samples of large volumes, the error occurs due to the weight of the liquid column, which compresses the liquid. In addition, errors may be due to the difference between the current operating temperature of the pipette and the temperature during calibration of the pipette. For example, after prolonged use by the user, the pipette heats up. Heating the pipette causes an expansion of the components that control the amount of fluid being drawn in or out, causing errors in the required volume of fluid being taken. In a cold pipette, the components are reduced in volume. Still additional errors are based on the current atmospheric conditions in which the pipette is located and which differ from the atmospheric conditions that occurred during calibration. For example, the temperature, pressure, and / or humidity of the atmosphere at which the pipette is operating may differ from the atmospheric parameters associated with the calibration of the pipette. Therefore, a method of adjustment is necessary depending on the current physical parameters of the pipette and / or the current required volume, providing accurate adjustment of the required volume of liquid in the pipette working with the liquid. In addition, you need a way to increase the accuracy of the pipette, which allows to reduce the cost of the pipette and simplify its manufacture.
СУЩНОСТЬ ИЗОБРЕТЕНИЯSUMMARY OF THE INVENTION
Примерный вариант выполнения изобретения относится к способу регулирования требуемого объема жидкости в пипетке, предназначенной для работы с жидкостью, посредством корректировки в зависимости от текущего физического параметра пипетки. Способ включает, но не ограничивается этим, выбор требуемого объема для пипетки, содержащей приводной механизм поршня, выполненный с возможностью контактирования с поршневым узлом с обеспечением перемещения штока поршня поршневого узла в держателе наконечника с обеспечением тем самым регулирования количества жидкости в держателе наконечника, причем требуемый объем представляет собой количество регулируемой жидкости; вычисление корректировочного объема с использованием характеристики объема, характеризующей отличие количества жидкости, регулируемой в держателе наконечника, как функцию требуемого объема, причем характеристику объема определяют с использованием процесса калибровки; и вывод на дисплей корректировочного объема для пользователя пипетки с обеспечением регулирования тем самым требуемого объема жидкости в держателе наконечника.An exemplary embodiment of the invention relates to a method for controlling the required volume of liquid in a pipette designed to work with a liquid, by adjusting it depending on the current physical parameter of the pipette. The method includes, but is not limited to, selecting a desired volume for a pipette containing a piston drive mechanism configured to contact a piston assembly to allow movement of the piston rod of the piston assembly in the tip holder, thereby controlling the amount of liquid in the tip holder, the required volume represents the amount of fluid regulated; calculating a correction volume using a volume characteristic characterizing the difference in the amount of fluid adjustable in the tip holder as a function of the required volume, the volume characteristic being determined using a calibration process; and displaying the correction volume for the pipette user to thereby control the required volume of liquid in the tip holder.
Другой примерный вариант изобретения относится к устройству для регулирования требуемого объема жидкости в пипетке, предназначенной для работы с жидкостью, посредством корректировки в зависимости от текущего физического параметра пипетки. Устройство включает, но этим не ограничивается, корпус, держатель наконечника, поршневой узел, приводной механизм поршня, приспособление для выбора объема, дисплей и процессор. Держатель наконечника прикреплен к корпусу. Поршневой узел соединен с держателем наконечника и содержит, но не ограничивается этим, шток поршня, вставленный в держатель наконечника. Приводной механизм поршня включает, но не ограничивается этим, управляющий шток, имеющий поверхность, которая контактирует с поршневым узлом. Приводной механизм поршня выполнен с возможностью перемещения штока поршня поршневого узла в держателе наконечника с обеспечением регулирования жидкости в держателе наконечника. Приспособление для выбора объема соединено с корпусом и выполнено с обеспечением возможности выбора пользователем требуемого объема, который представляет собой количество регулируемой жидкости. Дисплей присоединен к корпусу. Процессор соединен с дисплеем и с приспособлением для выбора объема и выполнен с возможностью вычисления корректировочного объема с использованием характеристики объема. Характеристика объема характеризует отличие количества жидкости, регулируемой в держателе наконечника, как функцию требуемого объема. Характеристику объема определяют с использованием процесса калибровки. Дисплей показывает корректировочный объем пользователю пипетки с обеспечением тем самым регулирования требуемого объема жидкости в держателе наконечника.Another exemplary embodiment of the invention relates to a device for controlling the required volume of liquid in a pipette designed to work with liquid, by adjusting it depending on the current physical parameter of the pipette. The device includes, but is not limited to, a housing, a tip holder, a piston assembly, a piston drive mechanism, a volume selector, a display, and a processor. The tip holder is attached to the body. The piston assembly is connected to the tip holder and includes, but is not limited to, a piston rod inserted in the tip holder. The piston drive mechanism includes, but is not limited to, a control rod having a surface that is in contact with the piston assembly. The piston drive mechanism is arranged to move the piston rod of the piston assembly in the tip holder to provide fluid control in the tip holder. The volume selection device is connected to the housing and is configured to allow the user to select the desired volume, which is the amount of fluid to be controlled. The display is attached to the housing. The processor is connected to the display and to a device for selecting a volume and is configured to calculate an adjustment volume using a volume characteristic. The volume characteristic characterizes the difference in the amount of fluid, adjustable in the tip holder, as a function of the required volume. The volume characteristic is determined using a calibration process. The display shows the correction volume to the user of the pipette, thereby ensuring the regulation of the required volume of liquid in the tip holder.
Другие важные свойства и преимущества изобретения будут очевидны специалистам при рассмотрении чертежей, подробного описания и формулы изобретения.Other important features and advantages of the invention will be apparent to those skilled in the art upon consideration of the drawings, detailed description, and claims.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙBRIEF DESCRIPTION OF THE DRAWINGS
Предпочтительные варианты выполнения описаны ниже со ссылками на сопровождающие чертежи, на которых одинаковые номера позиций обозначают одинаковые элементы.Preferred embodiments are described below with reference to the accompanying drawings, in which like numbers refer to like elements.
Фиг.1 изображает разрез электронной пипетки в соответствии с примерным вариантом настоящего изобретения.Figure 1 depicts a section of an electronic pipette in accordance with an exemplary embodiment of the present invention.
Фиг.2 изображает разрез приводного механизма поршня, поршневого узла, держателя наконечника и внешнего механизма сбрасывания наконечника электронной пипетки, показанной на фиг.1.Figure 2 depicts a section of the drive mechanism of the piston, the piston assembly, the tip holder and the external dropping mechanism of the tip of the electronic pipette shown in figure 1.
Фиг.3 изображает разрез пипетки без электропривода в соответствии с первым примерным вариантом настоящего изобретения.Figure 3 depicts a section of a pipette without an electric drive in accordance with the first exemplary embodiment of the present invention.
Фиг.4 изображает разрез пипетки без электропривода, показанной на фиг.3, прикрепленной к калибровочному устройству, в соответствии с первым примерным вариантом настоящего изобретения.FIG. 4 is a sectional view of a pipette without the electric drive shown in FIG. 3 attached to a calibration device in accordance with a first exemplary embodiment of the present invention.
Фиг.5 изображает блок-схему операций по калибровке пипетки, показанной на фиг.4.FIG. 5 is a flowchart for calibrating the pipette shown in FIG. 4.
Фиг.6 изображает диаграмму, которая представляет зависимость ошибки регулирования между действительным объемом и калибровочным объемом в пипетке.6 depicts a diagram that represents the dependence of the control error between the actual volume and the calibration volume in the pipette.
Фиг.7 изображает первую примерную таблицу, представляющую параметры объема в соответствии с примерным вариантом настоящего изобретения.7 depicts a first exemplary table representing volume parameters in accordance with an exemplary embodiment of the present invention.
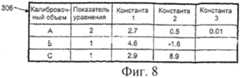
Фиг.8 изображает вторую примерную таблицу, представляющую параметры объема в соответствии с примерным вариантом настоящего изобретения.Fig. 8 depicts a second exemplary table representing volume parameters in accordance with an exemplary embodiment of the present invention.
Фиг.9 изображает диаграмму, которая представляет зависимость ошибки регулирования между действительным объемом и калибровочным объемом в пипетке при различных рабочих условиях.Figure 9 depicts a diagram that represents the dependence of the regulation error between the actual volume and the calibration volume in the pipette under various operating conditions.
Фиг.10 изображает блок-схему примерных операций пипетки в соответствии с примерным вариантом настоящего изобретения.10 is a flowchart of exemplary pipette operations in accordance with an exemplary embodiment of the present invention.
Фиг.11 изображает разрез приводного механизма поршня пипетки без электропривода, показанной на фиг.3, в соответствии со вторым примерным вариантом.11 depicts a section of the drive mechanism of the piston of the pipette without the electric drive shown in figure 3, in accordance with the second exemplary embodiment.
Фиг.12 изображает разрез приводного механизма поршня пипетки без электропривода, показанной на фиг.3, в соответствии с третьим примерным вариантом.FIG. 12 is a sectional view of a pipette piston drive mechanism without the electric drive shown in FIG. 3 in accordance with a third exemplary embodiment.
Фиг.13 изображает разрез держателя наконечника и окружающего кожуха пипетки без электропривода, показанной на фиг.3, в соответствии с четвертым примерным вариантом.FIG. 13 is a sectional view of the tip holder and the surrounding pipette housing without the electric drive shown in FIG. 3 in accordance with a fourth exemplary embodiment.
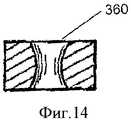
Фиг.14 изображает разрез датчика в соответствии с четвертым примерным вариантом, показанным на фиг.13.Fig. 14 is a sectional view of a sensor in accordance with a fourth exemplary embodiment shown in Fig. 13.
Фиг.15 изображает разрез приводного механизма поршня и поршневого узла пипетки без электропривода, показанной на фиг.3, в соответствии с пятым примерным вариантом.FIG. 15 is a sectional view of the piston drive mechanism and the piston assembly of the pipette without the electric drive shown in FIG. 3 in accordance with a fifth exemplary embodiment.
Фиг.16 изображает вид сбоку поршневого узла пипетки без электропривода, показанной на фиг.5, в соответствии с пятым примерным вариантом.FIG. 16 is a side view of the piston assembly of the pipette without the electric drive shown in FIG. 5 in accordance with a fifth exemplary embodiment.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВDETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTS
Как принято в данном описании, термин "установка" включает присоединение, объединение, связь, вставку, подвешивание, прикрепление, приложение, пристегивание, привязывание, приклеивание, соединение болтами, запирание, соединение винтами, клепку, пайку, сварку и другие подобные термины. Термин "регулирование" включает забор и/или выдачу жидкости в пипетке. Как показано в примерных вариантах выполнения на фиг.1 и 2, электронная пипетка 30 может получать команды на автоматический забор и выдачу последовательности объемов жидкости в один или более держателей 36 наконечника. Электронная пипетка 30 включает ряд составных частей и подсистем, которые вместе обеспечивают различные режимы работы для забора и выдачи жидкостей в точных объемах. Составные части и подсистемы пипетки 30 включают, но не ограничиваются этим, кожух 32, приводной механизм 34 поршня, поршневой узел 35, держатель 36 наконечника, внутреннюю подсистему 38 питания, внешний механизм 40 сбрасывания наконечника, внутренний механизм 42 сбрасывания наконечника, управляющую электронную схему 44, дисплей 170 и приспособление 172 для выбора объема.As used herein, the term “installation” includes joining, joining, bonding, inserting, hanging, attaching, attaching, fastening, snapping, gluing, bolting, locking, screwing, riveting, soldering, welding and the like. The term "regulation" includes the collection and / or delivery of fluid in a pipette. As shown in the exemplary embodiments of FIGS. 1 and 2, the electronic pipette 30 may receive instructions to automatically collect and issue a sequence of fluid volumes to one or
Некоторые из этих составных частей и подсистем известны специалистам и поэтому подробно здесь не обсуждаются. Кожух 32 обычно является полым и служит в качестве базы позиционирования для других составных частей пипетки 30. Большинство составных частей пипетки прямо или косвенно крепятся к кожуху 32. Кожух 32 снабжен ручкой, чтобы пользователь мог держать пипетку 30, и является, таким образом, одной из частей пипетки, которая вступает в прямой контакт с рукой пользователя, когда он работает с пипеткой.Some of these components and subsystems are known to those skilled in the art and are therefore not discussed in detail here. The casing 32 is typically hollow and serves as a positioning base for the other components of the pipette 30. Most of the components of the pipette are directly or indirectly attached to the casing 32. The casing 32 is provided with a handle so that the user can hold the pipette 30, and is thus one of parts of the pipette, which comes into direct contact with the user's hand when he is working with the pipette.
Внутренняя подсистема 38 питания содержит батарею 120, соединитель 122 и кожух 124 батареи. Кожух 124, удерживающий батарею 120, вставлен в кожух 32. Батарея может давать энергию, например, механизму 34 и/или схеме 44. Соединитель 122 обеспечивает электрическое соединение со схемой 44. Схема 44 включает, но не ограничивается этим, процессор, блок памяти, синхронизатор и другую связанную с этим электронику (не показаны).The internal power subsystem 38 includes a battery 120, a connector 122, and a battery case 124. A casing 124 holding the battery 120 is inserted into the casing 32. The battery may provide energy, for example, to mechanism 34 and / or circuit 44. Connector 122 provides electrical connection to circuit 44. Circuit 44 includes, but is not limited to, a processor, a memory unit, synchronizer and other related electronics (not shown).
Механизм 34 вызывает забор и выдачу определенного объема жидкости через держатель 36 посредством перемещения штока 94 поршня в узле 35 вдоль продольной оси А-А в держателе 36. Перемещение поршня создает смещение воздуха, которое втягивает или выбрасывает жидкость соответственно внутрь или наружу из держателя 36. Механизм 34 может управляться вручную пользователем, например, путем вращения приспособления 202 для выбора объема, как показано на фиг.3, или автоматически, с использованием двигателя 70. В примерном варианте, изображенном на фиг.2, механизм 34 может включать, но не ограничивается этим, двигатель 70, управляющий шток 72, наконечник 74 управляющего штока, опору 76 управляющего штока, корпус 78 и ручку 80 крепления держателя наконечника. Механизм 34 с возможностью отсоединения может быть установлен внутри кожуха 32 пипетки 30, так что управляющий шток 72 проходит вдоль продольной оси А-А.The mechanism 34 causes the intake and delivery of a certain volume of liquid through the
Двигатель 70 приводит в движение шток 72 под управлением процессора, соединенного со схемой 44. Двигатель 70 может быть выполнен с использованием множества электромеханических устройств, как известно специалистам. Двигатель 70 точно перемещает управляющий шток взад и вперед по продольной оси А-А для забора или выдачи жидкости соответственно в держатель 36 или из него. Двигатель 70 подключен к процессору схемы 44, от которого двигатель 70 получает электрические сигналы для управления перемещением штока 72. Схема 44 может включать один или несколько соединителей или интерфейс для связи с двигателем 70. Наконечник 74 управляющего штока закреплен на конце штока 72, противоположном двигателю 70. Например, наконечник 74 может навинчиваться на шток 72 или в него. Опора 76 поддерживает смещение управляющего штока вдоль продольной оси А-А. Корпус 78 крепится к опоре 76 и охватывает часть штока 72 и наконечник 74, которые выступают за опору 76, и образует гнездо.The
В примерном варианте выполнения, показанном на фиг.2, узел 35 включает, но не ограничивается этим, головку 92 поршня, шток 94 поршня, корпус 96 поршня, возвратную пружину 98 поршня и направляющую 100 пружины. Головка 92 поршня может быть круглым диском, выполненным из металла или пластмассы. Головка 92 имеет первую поверхность 91. Шток 94 крепится к головке 92 и проходит в целом в перпендикулярном направлении с противоположной стороны от первой поверхности 91 головки 92. Шток 94 имеет в целом цилиндрическую форму.In the exemplary embodiment shown in FIG. 2, the
Корпус 96 поршня крепится к головке 92 поршня, проходит в целом перпендикулярно с противоположной стороны от первой поверхности 91 и охватывает шток 94. Корпус 96 имеет в целом цилиндрическую форму и может включать одну или несколько конических частей. Пружина 98 поршня крепится к корпусу 96 и проходит в целом в перпендикулярном направлении с противоположной стороны от первой поверхности 91 головки 92 вдоль продольной оси А-А. В примерном варианте выполнения пружина 98 скользит по корпусу 96 и удерживается на месте силами трения между пружиной 98 и частью корпуса 96, смежной с головкой 92 поршня. Узел 35 скользит в корпус 78 приводного механизма поршня, как показано на фиг.2.The
Как показано для примерного варианта выполнения на фиг.2, держатель 36 включает, но не ограничивается этим, верхнюю трубку 110, нижнюю трубку 112 и уплотнительное кольцо 114. Нижняя трубка 112 крепится к верхней трубке 110. Например, трубка 112 может иметь конец с резьбой, который завинчивается в дополнительную резьбовую поверхность верхней трубки 110. Трубки 110 и 112 могут иметь одну или несколько конических частей. Кольцо 114 расположено в выточке, расположенной между трубками 110 и 112, и обеспечивает водонепроницаемое соединение между штоком 94 и нижней трубкой 112. По держателю 36 скользит гайка 84 крепления трубки, которая прижимается к узлу 35, не давая, таким образом, двигаться держателю 36 относительно кожуха 32 и механизма 34.As shown for the exemplary embodiment of FIG. 2, the
Наконечник 74 штока поршня контактирует с первой поверхностью 91 узла 35 внутри корпуса 78 механизма 34. При выдаче жидкости механизм 34 посредством смещения наконечника 74 вдоль продольной оси А-А толкает узел 35 от механизма 34 в точке, где наконечник 74 контактирует с первой поверхностью 91. Возвратная пружина 98 давит на направляющую 100 пружины, удерживаемую на месте гайкой 84. При заборе жидкости механизм 34 перемещает наконечник 74 к механизму 34. Несмотря на это смещение, первая поверхность 91 остается в контакте с наконечником 74 в результате сжимающей силы, создаваемой возвратной пружиной 98.The
Внешний механизм 40 сбрасывания наконечника и внутренний механизм 42 сбрасывания наконечника сталкивают наконечник 130 с конца пипетки 30 для набора и выпуска, избегая возможного загрязнения проб. Внутренний механизм 42 включает, но не ограничивается этим, рукоятку 140 сбрасывания, неподвижный цилиндр 142, цилиндр 144 рукоятки, основной цилиндр 146, шток 148, сбрасывающую пружину 150 и монтажную скобу 152. Неподвижный цилиндр 142 крепится к кожуху 32. Монтажная скоба 152 крепится к кожуху 32 и/или неподвижному цилиндру 142. Неподвижный цилиндр 142 и монтажная скоба 152 остаются неподвижными по отношению к кожуху 32. Рукоятка 140 крепится к цилиндру 144. Рукоятка 140 может поворачиваться вокруг продольной оси А-А, таким образом обеспечивая удобную работу при использовании пользователем левой или правой руки. Цилиндр 144 крепится со скольжением к неподвижному цилиндру 142 с обеспечением возможности перемещения цилиндра 144 в комбинации с нажатием рукоятки 140 для сбрасывания наконечника 130. Цилиндр 146 крепится к цилиндру 144. Шток 148 крепится к концу цилиндра 146 напротив цилиндра 144. Пружина 150 крепится к цилиндру 146 у первого конца 156 и к монтажной скобе 152 у второго конца 158. Нажатие рукоятки 140 вызывает перемещение штока 148 к наконечнику 130, пружина 150 вызывает перемещение штока 148 в обратном направлении, таким образом, двигая рукоятку 140 назад в исходное положение, когда пользователь отпускает рукоятку 140.An external
Как показано на фиг.2, внешний механизм 40 включает, но не ограничивается этим, лопасть 156 сбрасывания и рукоятку 158 регулировки лопасти сбрасывания. Лопасть 156 имеет криволинейную форму, которая повторяет наружную форму держателя 36. Лопасть 156 имеет первый конец 160 и второй конец 162. Второй конец 162 содержит закрытый цилиндр, который скользит по держателю 36. В результате, нажатие рукоятки 140 вызывает перемещение лопасти 156 вдоль держателя 36, сбрасывающей наконечник 130 с держателя 36 вторым концом 162. Поворот рукоятки 158, присоединенной к лопасти 156 вблизи первого конца 160, вызывает перемещение второго конца 162 лопасти 156 вверх или вниз по отношению к держателю 36. Регулирование положения лопасти 156 вдоль держателя 36 позволяет внешнему механизму 40 сбрасывать наконечники разных типов.As shown in FIG. 2, the
Пипетка 30 может включать интерфейс для связи с компьютерным устройством. Компьютерное устройство может быть компьютером любого вида, включая настольный, портативный дорожный, персональный обработчик данных и т.д. Компьютерное устройство физически отделено от пипетки 30. Связной интерфейс может быть расположен наверху кожуха 32, противоположно наконечнику 130, для легкого доступа пользователя без перерыва в работе пипетки 30. Для связи между пипеткой 30 и компьютерным устройством могут использоваться различные технологии передачи, включая, но не ограничиваясь этим, CDMA (множественный доступ с кодовым разделением каналов), GSM (глобальная система мобильной связи), UMTS (система универсальных мобильных телекоммуникаций), TDMA (множественный доступ с временным разделением каналов), TCP/IP (протокол управления передачей/Интернет-протокол), SMS (служба коротких сообщений), MMS (служба мультимедийных сообщений), e-mail (электронная почта), IMS (служба быстрых сообщений), Bluetooth, IEEE 802.11 и т.д. Пипетка 30 и компьютерное устройство могут связываться с использованием различных средств, включая, но не ограничиваясь этим, радио, инфракрасное излучение, лазеры, кабельные соединения и т.д. Таким образом, связной интерфейс может использовать проводную и/или беспроводную связь.The pipette 30 may include an interface for communicating with a computer device. A computer device can be any type of computer, including a desktop, portable travel, personal data processor, etc. The computer device is physically separated from the pipette 30. The communication interface can be located at the top of the casing 32, opposite the
Проводное соединение может включать первый конец, который соединен со связным интерфейсом пипетки 30, и второй конец, который соединен со связным интерфейсом компьютерного устройства. В примерном варианте связной интерфейс пипетки 30 удовлетворяет стандартам Института Инженеров Электротехники и Электроники (IEEE) 1394 mini. В примерном варианте связной интерфейс компьютерного устройства может быть типа RS 232, который предназначен для приема соединителя с Универсальной Последовательной Шиной (USB). В альтернативном варианте связной интерфейс пипетки 30 и/или связной интерфейс компьютерного устройства может быть Этернет интерфейс.The wired connection may include a first end that is connected to the communication interface of the pipette 30, and a second end, which is connected to the communication interface of the computer device. In an exemplary embodiment, the connected interface of the pipette 30 meets the standards of the Institute of Electrical and Electronics Engineers (IEEE) 1394 mini. In an exemplary embodiment, the communication interface of the computer device may be of
Беспроводные связные интерфейсы могут связывать устройства на различных расстояниях от коротких до длинных. Пипетка 30 и компьютерное устройство могут поддерживать обработку для передачи и приема беспроводного сигнала. Беспроводной сигнал может, например, использовать стандарт IEEE 802.11™, используя любую версию 802.11а, 802.11b, 802.1f или 802.11g. Кроме того, беспроводной сигнал может, например, использовать стандарт Bluetooth, последней версией которого является IEEE 802.15.1. Спецификации IEEE 802.11™ определяют беспроводные стандарты для Беспроводной Локальной Сети (WLANs), которые обеспечивают интерфейс "через воздух" между беспроводным клиентом и базовой станцией или точкой доступа, а также среди других беспроводных клиентов. Рабочая Группа IEEE 802.15 обеспечивает стандарты для Беспроводных Персональных Сетей низкой сложности и низкого потребления мощности, таких, которые поддерживаются Bluetooth спецификацией.Wireless communication interfaces can communicate devices over short to long distances. The pipette 30 and the computer device may support processing for transmitting and receiving a wireless signal. A wireless signal can, for example, use the IEEE 802.11 ™ standard using any version of 802.11a, 802.11b, 802.1f or 802.11g. In addition, a wireless signal can, for example, use the Bluetooth standard, the latest version of which is IEEE 802.15.1. The IEEE 802.11 ™ specifications define wireless standards for Wireless Local Area Networks (WLANs) that provide an air-to-air interface between a wireless client and a base station or access point, as well as among other wireless clients. The IEEE 802.15 Working Group provides standards for Low Complexity and Low Power Consumption Wireless Personal Networks, such as those supported by the Bluetooth specification.
На фиг.3 показано поперечное сечение пипетки 200 без электропривода в примерном варианте. Составные части и подсистемы пипетки 200 включают, но этим не ограничиваются, приспособление 202 для выбора объема, кожух 204, приводной механизм 206 поршня, поршневой узел 208, держатель 210 наконечника, батарею 212, механизм 214 сбрасывания наконечника, дисплей 216, управляющую электронную схему 218 и индикатор 256 типа наконечника. Некоторые из этих составных частей и подсистем известны специалистам и потому здесь не обсуждаются в деталях. Приспособление 202 включает рукоятку 220 и регулировочный винт 222. Вращение рукоятки 220 вызывает перемещение регулировочного винта 222 вперед и назад в продольном направлении А-А, изменяя, таким образом, требуемый для забора или выдачи объем.Figure 3 shows a cross section of a
Кожух 204 выполнен из цельного куска материала. В примерном варианте материалом является пластмасса. Кожух 204 обычно является полым и служит базой позиционирования для других составных частей пипетки 200. Например, положение регулировочного винта 222 регулируется по отношению к кожуху 204 и управляет установкой требуемого объема жидкости, который нужно регулировать. Таким образом, многие составные части пипетки прямо или косвенно крепятся к кожуху 204. Кожух 204 включает, но не ограничивается этим, окно, через которое виден дисплей 216. Окно может быть выполнено из стекла или прозрачного пластика. Кожух 204 создает захват для пользователя, чтобы держать пипетку 200, и, таким образом, является одной из частей пипетки, которая вступает в прямой контакт с рукой пользователя при работе с пипеткой.The
Механизм 206 вызывает забор и выдачу требуемого объема жидкости через держатель 210 посредством перемещения штока 224 поршня внутри узла 208 вдоль продольной оси А-А. Перемещение штока поршня создает смещение воздуха, которое набирает или выпускает жидкость в держатель 210 или из него. Механизм 206 может включать, но не ограничивается этим, управляющий шток 226, наконечник 228 управляющего штока, опору 230 управляющего штока, корпус 232, рукоятку 234 крепления держателя наконечника. Механизм 206 может быть с возможностью отсоединения установлен внутри кожуха 204 пипетки 200, так что управляющий шток 226 проходит вдоль продольной оси А-А. В примерном варианте выполнения рукоятка 254 крепится к рукоятке 234, фиксируя внутренние части пипетки 200.The
Поворот рукоятки 220 вызывает поступательное перемещение управляющего штока 226. Наконечник 228 крепится к концу управляющего штока 226 напротив рукоятки 220. Например, наконечник 228 может навинчиваться на управляющий шток 226 или ввинчиваться в него. Опора 230 поддерживает смещение управляющего штока 226 вдоль продольной оси А-А. Корпус 232 крепится к опоре 230 и охватывает часть управляющего штока 226 и наконечник 228, которые выходят за опору 230, образуя гнездо.The rotation of the
Узел 208 включает, но не ограничивается этим, головку 236 поршня, шток 224 поршня, корпус 240 поршня, возвратную пружину 242 поршня и направляющую 244 пружины. Головка 236 поршня может быть круглым диском, выполненным из металла или пластмассы. Головка 236 поршня имеет первую поверхность 246. Шток 224 крепится к головке 236 и проходит в целом в перпендикулярном направлении с противоположной стороны от первой поверхности 246 головки 236 поршня. Шток 224 поршня имеет в целом цилиндрическую форму.The
Корпус 240 поршня крепится к головке 236 поршня, проходит в целом в перпендикулярном направлении с противоположной стороны от первой поверхности 246 головки 236 поршня и охватывает шток 224. Корпус 240 имеет в целом цилиндрическую форму и может включать одну или несколько конических частей. Возвратная пружина 242 крепится к корпусу 240 и проходит в целом в перпендикулярном направлении с противоположной стороны от первой поверхности 246 головки 236 поршня вдоль продольной оси А-А. В примерном варианте выполнения пружина 242 поршня скользит по корпусу 240 поршня и удерживается на месте силами трения между пружиной 242 и частью корпуса 240, прилегающей к головке 236 поршня. В собранном состоянии узел 208 скользит в корпусе 232 механизма 206, как показано на фиг.3.The
Как показано на фиг.2 для примерного варианта выполнения, держатель 210 включает, но не ограничивается этим, верхнюю трубку 248, нижнюю трубку 250 и уплотнительное кольцо 252. Нижняя трубка 250 крепится к верхней трубке 248. Например, нижняя трубка 250 может включать конец с резьбой, который завинчивается в дополняющую резьбовую поверхность верхней трубки 248. Верхняя трубка 248 и нижняя трубка 250 могут включать одну или несколько конических частей. Кольцо 252 расположено в выемке, находящейся между верхней трубкой и нижней трубкой 250 и обеспечивает водонепроницаемое соединение между штоком 224 и нижней трубкой 250. По держателю 210 скользит гайка 254 крепления трубок, которая прижимается к узлу 208, таким образом фиксируя держатель 210 относительно кожуха 204 и механизма 206.As shown in FIG. 2 for an exemplary embodiment, the
Наконечник 228 контактирует с первой поверхностью 246 узла 208 внутри корпуса 232 механизма 206. При выпуске жидкости механизм 206 за счет смещения наконечника 228 вдоль продольной оси А-А толкает узел 208 от механизма 206 в точке, где наконечник 228 управляющего штока контактирует с первой поверхностью 246. Возвратная пружина 242 давит на направляющую 244 пружины, удерживаемую на месте гайкой 254. При заборе жидкости механизм 206 перемещает наконечник 228 в направлении механизма 206. Несмотря на смещение, первая поверхность 246 остается в контакте с наконечником 228 в результате действия сжимающей силы пружины 242.The
Механизм 214 сбрасывания наконечника сталкивает наконечник 130 с впускного и выпускного конца пипетки 30, исключая возможное загрязнение проб, таким же образом, как описано выше применительно к фиг.2 и 3. Дисплей 216 выдает информацию пользователю пипетки. Например, требуемый объем, выбранный пользователем посредством поворота рукоятки 220, может быть показан на дисплее 216. Схема 218 включает, но не ограничивается этим, процессор, блок памяти, синхронизатор и другую связанную с этим электронику (не показаны), чтобы управлять дисплеем 216 и регулированием пипетки 200. Батарея обеспечивает энергией, например, дисплей 216 и схему 218.The
На фиг.4 пипетка 200 во время процесса калибровки соединена с калибровочным устройством 260 соединительным кабелем 262. Кабель 262 присоединяется к пипетке через разъем 264, обеспечивая прямое поступление данных от устройства 260 в блок памяти пипетки. Например, разъем 264 может быть соединителем типа RS 232. В альтернативном варианте пипетка 30 может использоваться подобным образом.4, the
На фиг.5 показана блок-схема примерных операций процесса калибровки при использовании пипетки 200, показанной на фиг.4. В операции 278 определяют вес пустой пипетки 200 с использованием устройства 260. В операции 280 пользователь выбирает калибровочный объем, который нужно регулировать в пипетке 200. В операции 282 пользователь набирает требуемый объем, используя пипетку 200. В операции 284 с использованием устройства 260 измеряют вес пипетки, включая набранную жидкость. В операции 286 рассчитывают истинный объем, набранный в пипетку, исходя из разницы между весом пипетки 200 после набора и весом пустой пипетки 200 и физических характеристик набранной жидкости, известных специалистам. В операции 288 рассчитанный истинный объем, набранный в пипетку, посылают в пипетку 200, где он хранится вместе с калибровочным объемом в блоке памяти. Например, калибровочный объем и измеренный истинный объем, набранный в пипетку, могут храниться в базе данных или в таблице, как известно специалистам. В операции 290 проводят проверку, нужно ли еще набрать дополнительный калибровочный объем. Если ответ на вопрос будет положительный, операции 280-288 повторяют для набора дополнительного калибровочного объема. В альтернативном варианте выполнения вес пустой пипетки может быть рассчитан для каждого дополнительного калибровочного объема. В операции 292 определяют характеристику объема, которая характеризует разницу в количестве регулируемой жидкости как функции калибровочного объема или объемов, если используются дополнительные калибровочные объемы.FIG. 5 is a flowchart of exemplary operations of a calibration process using the
На фиг.6 показаны идеальная кривая 294 и кривая 296 измерений. Идеальная кривая 294 показывает идеальную пипетку, которая набирает в точности калибровочный объем. Кривая 296 показывает действительную зависимость для пипетки. Разница между кривой 294 и кривой 296 представляет ошибку регулирования. Например, во время процесса калибровки, описанного на фиг.5, выбраны три калибровочных объема А, В и С. На основе калибровочного объема А во время процесса калибровки измеряют действительный объем Aа. Ошибка 298 регулирования представляет собой разность между калибровочным объемом А и действительным объемом Aа, или Aа-А. Подобным же образом ошибка 300 регулирования является разностью между калибровочным объемом В и действительным объемом Bа, или Bа-B. Аналогично ошибка 302 регулирования является разностью между калибровочным объемом С и действительным объемом Са, или Cа-С.6 shows an
Калибровочный объем, например А, и соответствующий действительный набранный объем Aа определяют точку калибровочных данных. Чем больше точек калибровочных данных используется во время процесса калибровки, тем более точная аппроксимация к кривой 296 измерений может быть рассчитана. Как известно специалистам в области моделирования, могут использоваться различные способы аппроксимации кривой 296, использующие данные калибровки, которые включают калибровочный объем и ошибку регулирования, или действительный набранный объем. Характеристика объема может быть определена с использованием любого из этих способов, чтобы определить кривую 296 измерений для объемов, отличных от калибровочного объема.A calibration volume, for example A, and the corresponding actual accumulated volume Aa determine the point of the calibration data. The more points of the calibration data used during the calibration process, the more accurate approximation to the
Например, чтобы обеспечить наилучшее приближение к системе точек данных, могут использоваться различные алгоритмы приближения кривых. Результатом алгоритма приближения кривой является уравнение. Например, для аппроксимации кривой измерений, использующей данные калибровки в точках А, В и С, можно использовать полином n-го порядка. Таким образом, с использованием данных калибровки в одной или более точках определяется характеристика объема. Например, характеристика объема может представлять собой уравнение, полученное с использованием алгоритма приближения кривой. Если одно уравнение не является адекватным, чтобы моделировать кривую 296, могут быть получены дополнительные уравнения, чтобы определить кривую для требуемого набранного объема в промежутке между калибровочными объемами. Например, основываясь на кривой 296, для объемов, превышающих В, может быть подходящим линейное уравнение. Но для объемов меньших, чем В, кривая 296 может лучше аппроксимироваться полиномом. В этом случае характеристика объемов включает два уравнения.For example, to provide the best fit to a data point system, various curve fitting algorithms can be used. The result of the curve approximation algorithm is an equation. For example, to approximate a measurement curve using calibration data at points A, B, and C, an nth-order polynomial can be used. Thus, using calibration data at one or more points, a volume characteristic is determined. For example, a volume characteristic may be an equation obtained using a curve approximation algorithm. If one equation is not adequate to simulate
В качестве альтернативы характеристикой объема может быть таблица, которая содержит множество данных в точках калибровки. Определение действительного набранного объема осуществляется интерполяцией данных между точками калибровки или экстраполяцией данных от точки калибровки, используя найденное ранее уравнение. В качестве другой альтернативы в таблицу может быть включено уравнение, которое используется для интерполяции и/или экстраполяции данных от точки калибровки. Данные могут быть сведены в таблицу, как это известно специалистам. Таблица может быть в любой форме, включая, но не ограничиваясь этим, файл и базу данных. На фиг.7 в качестве примерного пояснения показана таблица 304, представляющая ошибку регулирования как функцию калибровочных объемов А, В и С. Любая из двух или обе величины - действительный набранный объем и ошибка регулирования - могут быть помещены в таблице 295.Alternatively, a volume characteristic may be a table that contains a plurality of data at calibration points. The actual accumulated volume is determined by interpolating the data between the calibration points or extrapolating the data from the calibration point using the equation found earlier. As another alternative, an equation may be included in the table that is used to interpolate and / or extrapolate data from the calibration point. The data may be tabulated as is known to those skilled in the art. A table can be in any form, including, but not limited to, a file and a database. 7, an exemplary explanation is shown in table 304, which represents a control error as a function of calibration volumes A, B, and C. Any of two or both values — actual accumulated volume and control error — can be placed in table 295.
В альтернативном случае в таблице 306 на фиг.8 включены показатель уравнения и сопутствующие константы для использования в уравнении. Например, показатель 1 уравнения указывает на линейное уравнение, в котором используется только "Константа 1" для описания кривой 296 измерений между каждым калибровочным объемом. Показатель 3 уравнения указывает на второй порядок полиномиального уравнения, в котором для описания кривой 296 между каждым калибровочным объемом используется "Константа 1", "Константа 2" и "Константа 3". Таким образом, уравнение 2,7+0,5А+0,01А2определяет корректировочный объем для требуемого объема, меньшего чем А. Уравнение 4,6-1,6А определяет корректировочный объем для требуемого объема, большего чем А и меньшего чем В. Уравнение 2,9+8,9А определяет корректировочный объем для требуемого объема, большего чем В.Alternatively, an equation metric and associated constants for use in the equation are included in table 306 of FIG. 8. For example,
В примерном варианте выполнения для определения характеристики объема используются, по меньшей мере, два калибровочных объема. Предпочтительно один из двух калибровочных объемов является минимальным рабочим объемом пипетки, а другой является максимальным рабочим объемом пипетки. Калибровка, использующая максимальный объем пипетки, позволяет максимально учесть механические погрешности, в частности смещение траектории винта и диаметр поршня, и вес жидкости в держателе наконечника. Калибровка, использующая минимальный объем пипетки, позволяет максимально учесть механические погрешности и явление капиллярности. Повышенная точность может быть получена путем использования дополнительных калибровочных объемов. Как только что отмечено, для определения корректировочного объема, соответствующего требуемому объему, который не равен одному или более калибровочному объему во время работы пипетки, могут использоваться различные методы интерполяции, известные специалистам.In an exemplary embodiment, at least two calibration volumes are used to determine volume characteristics. Preferably, one of the two calibration volumes is the minimum pipette working volume, and the other is the maximum pipette working volume. Calibration using the maximum pipette volume allows for maximum consideration of mechanical errors, in particular displacement of the screw path and piston diameter, and the weight of the fluid in the tip holder. Calibration using the minimum pipette volume allows for maximum consideration of mechanical errors and the capillarity phenomenon. Increased accuracy can be obtained by using additional calibration volumes. As just noted, various interpolation methods known to those skilled in the art can be used to determine a correction volume corresponding to a desired volume that is not equal to one or more calibration volumes during operation of the pipette.
Одно или несколько уравнений и/или таблиц можно использовать для определения характеристики объема, основанной на дополнительных физических параметрах пипетки. Например, первое уравнение и/или таблица могут быть определены на основе типа пипетки. Второе уравнение и/или таблица могут быть определены для конкретной пипетки, потому что действительный измеренный объем может отличаться из-за допусков при изготовлении, благодаря которым составные части отличаются от пипетки к пипетке во время процесса изготовления.One or more equations and / or tables can be used to determine volume characteristics based on additional physical parameters of the pipette. For example, the first equation and / or table may be determined based on the type of pipette. The second equation and / or table can be defined for a particular pipette, because the actual measured volume may differ due to manufacturing tolerances, due to which the components are different from pipette to pipette during the manufacturing process.
Как дополнительный пример, кривая 296 может измениться, когда пипетка работает при различной окружающей температуре. На фиг.9 показаны в качестве примера три кривые измерений. Например, кривая 308 получена при окружающей температуре 10°С. Кривая 310 определена при окружающей температуре 20°С. Кривая 312 определена при окружающей температуре 25°С. В результате разные уравнения или системы уравнений могут использоваться для определения каждой из кривых 308, 310 и 312. Таким образом, для определения корректировочного объема характеристика объема использует этот параметр и требуемый объем. Как известно специалистам, могут использоваться различные методы интерполяции между многими кривыми. Так, параметр, представляющий текущее физическое состояние в пипетке, может использоваться для дальнейшего определения характеристики объема пипетки, таким образом корректируя дополнительные источники изменений в набранном объеме.As an additional example,
Параметры включают, но этим не ограничиваются, тип наконечника, используемый в пипетке, температуру воздуха в пипетке, температуру части пипетки, атмосферное давление в пипетке, давление в полости пипетки, влажность атмосферы в пипетке и вязкость жидкости, которую нужно регулировать. Индикатор 256 типа наконечника пипетки может использоваться пользователем пипетки, чтобы выбрать тип наконечника, помещенного на держатель 210. Наконечники, имеющие различные размеры и форму, могут давать различные измеренные кривые. Таким образом, тип наконечника, присоединенного к держателю наконечника, может изменить характеристику объема. Кроме того, для определения параметра, используемого с характеристикой объема для расчета корректировочного объема, на основе температуры атмосферы в пипетке, температуры части пипетки, атмосферного давления в пипетке, давления в полости пипетки и влажности атмосферы в пипетке, может использоваться один или более датчиков, смонтированных на пипетке (как показано на фиг.11-16). Датчик или индикатор дополнительно могут показывать тип жидкости, которую нужно регулировать. В этом случае характеристика объема включает коррекцию для выбранной жидкости, основанную, главным образом, на вязкости жидкости.Parameters include, but are not limited to, the type of tip used in the pipette, the temperature of the air in the pipette, the temperature of the pipette part, the atmospheric pressure in the pipette, the pressure in the pipette cavity, the humidity of the atmosphere in the pipette, and the viscosity of the fluid to be controlled. The pipette
В целом, характеристика объема, определенная с использованием параметров, измеренных датчиком, есть ошибка регулирования С, то есть определенное заранее математическое уравнение, выполняемое процессором и учитывающее измеренный параметр для атмосферного давления, для окружающей температуры и для атмосферной влажности. В примерном варианте С может быть вычислено как С=a*B+m, где В представляет собой требуемый объем, а "а" и "m" являются заданными корректировочными значениями. Значение "m" может быть нулем. Параметр "а" может быть определен выражениемIn general, the volume characteristic determined using the parameters measured by the sensor is a control error C, that is, a mathematical equation determined in advance by the processor and taking into account the measured parameter for atmospheric pressure, for ambient temperature, and for atmospheric humidity. In an exemplary embodiment, C may be calculated as C = a * B + m, where B is the desired volume, and “a” and “m” are predetermined correction values. The value of "m" may be zero. The parameter "a" can be defined by the expression
a=(1-Datm/e)/(Di-Datm),a = (1-Datm / e) / (Di -Datm ),
где Di и Datm являются значениями плотности регулируемой жидкости и воздуха соответственно и "е" является константой.where Di and Datm are the values of the density of the regulated fluid and air, respectively, and "e" is a constant.
Плотность Di рассчитывают из заданного математического выражения, включающего температуру, измеренную датчиком окружающей температуры. В данном примере Di=g/f(Ti), где g является константой, Ti является измеренной температурой, a f(Ti) является заданной полиномиальной функцией. Например,The density Di is calculated from a given mathematical expression including the temperature measured by the ambient temperature sensor. In this example, Di = g / f (Ti ), where g is a constant, Ti is the measured temperature, af (Ti ) is a given polynomial function. For example,
Di=1000/(999,87-0,06426 Ti+0,0085045 Тi 2-0,0000679Тi 3).Di = 1000 / (999.87-0.06426 Ti +0.0085045 Ti2 -0.0000679Ti3 ).
В этом уравнении Ti выражается в градусах Цельсия, a Di - в килограммах на метр кубический.In this equation, Ti is expressed in degrees Celsius, and Di in kilograms per cubic meter.
Таким же образом, Datm рассчитывают из заданного математического выражения, включающего переменное атмосферное давление, окружающую температуру и атмосферную влажность, которые измеряются датчиками. В этом примереIn the same way, Datm is calculated from a given mathematical expression, including variable atmospheric pressure, ambient temperature and atmospheric humidity, which are measured by sensors. In this example
Datm=45 Patm/(12908(Ti+273,15))+(Ti-0,02 H)1000,Datm = 45 Patm / (12908 (Ti +273.15)) + (Ti -0.02 H) 1000,
где Patm есть давление в паскалях и Н есть процент влажности. Например, Н есть 0,4 для 40% влажности.where Patm is the pressure in pascals and H is the percentage of moisture. For example, H is 0.4 for 40% humidity.
На фиг.10 показаны примерные операции процедуры корректировки регулирования жидкости в пипетке во время использования, основанные на характеристике объема, определенной во время процесса калибровки. В операции 320 пользователь выбирает требуемый объем для регулировки с использованием пипетки. В операции 322 определяют параметр, представляющий текущее физическое состояние в пипетке. С использованием характеристики объема, хранящейся в блоке памяти пипетки, в операции 324 с использованием процессора рассчитывают корректировочный объем. Характеристика объема определяет отличие количества жидкости, которую нужно регулировать, как функцию требуемого объема и/или параметра. Таким образом, корректировочный объем представляет отличие количества жидкости, которую нужно регулировать, как функцию требуемого объема и/или параметра. В операции 326 требуемый объем может быть представлен пользователю на дисплее.Figure 10 shows exemplary operations of the adjustment procedure for regulating the fluid in the pipette during use, based on the volume characteristic determined during the calibration process. In operation 320, the user selects the desired volume for adjustment using a pipette. In operation 322, a parameter representing the current physical state in the pipette is determined. Using the characteristics of the volume stored in the pipette memory, in 324 using the processor, the correction volume is calculated. The volume characteristic determines the difference in the amount of liquid that needs to be regulated as a function of the required volume and / or parameter. Thus, the correction volume represents the difference in the amount of liquid that needs to be adjusted as a function of the required volume and / or parameter. In operation 326, the desired volume can be presented to the user on the display.
В операции 328 корректировочный объем представляется на дисплее пользователю. Корректировочный объем может быть действительным набранным объемом или может быть ошибкой регулирования при требуемом объеме, основанной, например, на интерполяции уравнения между двумя точками калибровки, которые ограничивают требуемый объем. В операции 330 пользователь может выбрать новый требуемый объем, основываясь на показанном на дисплее корректировочном объеме. Например, если пипетка без электропривода, дисплей может показывать корректировочный объем и требуемый объем. В ответ пользователь выбирает новый требуемый объем, до тех пор пока корректировочный объем не совпадет с требуемым объемом в пределах точности, требуемой пользователем.In operation 328, the correction amount is displayed to the user. The correction volume may be the actual accumulated volume, or it may be an adjustment error for the required volume, based, for example, on the interpolation of the equation between two calibration points that limit the required volume. In operation 330, the user can select the new desired volume based on the correction volume shown on the display. For example, if the pipette is without an electric drive, the display may show the correction volume and the required volume. In response, the user selects the new required volume until the correction volume coincides with the required volume within the accuracy required by the user.
В альтернативном варианте выполнения корректировочный объем отображается на дисплее как требуемый объем, так что процесс корректировки пипетки, основанный на требуемом объеме и параметре, является прозрачным для пользователя. Так, например, используя пипетку 20 с электроприводом, процессор может автоматически корректировать положение управляющего штока для включения ошибки регулирования. Дисплей отображает требуемый объем, который также является корректировочным объемом, потому что процессор регулирует положение управляющего штока, чтобы регулировать требуемый объем, включая эффекты физического состояния пипетки 20 и требуемого объема. Так, в режиме работы, характеризующемся автоматической коррекцией дисплея, отображение на дисплее требуемого объема автоматически включает коррекцию. Изображение на дисплее изменяется вместе с физическими условиями в пипетке, и пользователь не должен выполнять никаких регулировок.In an alternative embodiment, the correction volume is displayed on the display as the desired volume, so that the pipette adjustment process based on the desired volume and parameter is transparent to the user. So, for example, using an electric drive pipette 20, the processor can automatically adjust the position of the control rod to include a control error. The display shows the required volume, which is also the correction volume, because the processor adjusts the position of the control rod to adjust the required volume, including the effects of the physical state of the pipette 20 and the required volume. So, in the mode of operation, characterized by automatic correction of the display, the display on the display of the required volume automatically includes correction. The image on the display changes along with the physical conditions in the dropper, and the user does not have to make any adjustments.
Индикатор выше/ниже может отображаться пользователю пипетки при операции 332. Индикатор выше/ниже показывает, является ли ошибка регулирования положительной или отрицательной. Индикатор выше/ниже может иметь знак минус, если есть риск недостаточной дозировки, когда действительный объем выше, чем калибровочный объем, или знак плюс, если есть риск избыточной дозировки, когда действительный объем ниже, чем калибровочный объем. В сущности, три вида информации могут быть предоставлены пользователю на дисплее в пипетке: требуемый объем, корректировочный объем и индикатор выше/ниже. Корректировочный объем может быть ошибкой регулирования или может быть действительным объемом. Используя эту информацию, пользователь может регулировать требуемый объем до тех пор, пока индикатор выше/ниже не покажет ни положительной, ни отрицательной эквивалентности между требуемым объемом и корректировочным объемом в пределах точности ошибки. В альтернативном варианте выполнения индикатор выше/ниже не отображается в пипетке.An indicator above / below can be displayed to the pipette user in operation 332. An indicator above / below indicates whether the control error is positive or negative. The indicator above / below may have a minus sign if there is a risk of insufficient dosage when the actual volume is higher than the calibration volume, or a plus sign if there is a risk of excessive dosage when the actual volume is lower than the calibration volume. In essence, three types of information can be provided to the user on the display in the pipette: the required volume, the correction volume and the indicator above / below. The correction volume may be a regulatory error or may be the actual volume. Using this information, the user can adjust the required volume until the indicator above / below shows neither positive nor negative equivalence between the required volume and the correction volume within the error accuracy. In an alternative embodiment, the indicator above / below is not displayed in the pipette.
В другом альтернативном варианте выполнения использование процедуры корректировки объема, который нужно регулировать, предоставляется на выбор пользователю. Так, пользователь может выбрать команду процессору не включать значения коррекции, когда пользователь отмеряет жидкость, используя пипетку. В другом альтернативном варианте выполнения процессор в пипетке может быть запрограммирован на выполнение корректировки, только когда коррекция больше, чем, например, значение точности. Определенные заранее значения точности могут быть выбраны, чтобы различать между обстоятельствами, которые включают значительную коррекцию, и теми, которые не включают таковой. Такие варианты выполнения максимизируют управление работой пипетки со стороны пользователя.In another alternative embodiment, the use of the volume adjustment procedure to be adjusted is left to the user to choose. So, the user can choose to instruct the processor not to include correction values when the user measures the liquid using a pipette. In another alternative embodiment, the pipetted processor can only be programmed to perform corrections when the corrections are greater than, for example, the accuracy value. Predefined accuracy values can be selected to distinguish between circumstances that include significant correction and those that do not include such. Such embodiments maximize user control of the pipette.
Процесс калибровки, показанный на фиг.5, и процедура использования, показанная на фиг.10, корректируют количество жидкости, регулируемой в пипетке, благодаря явлению капиллярности, возникающему при низком требуемом объеме, благодаря весу столба жидкости при большом требуемом объеме, благодаря несовершенству изготовления составных частей пипетки, благодаря типу наконечника пипетки и благодаря физическим условиям в пипетке, которые включают температуру воздуха в пипетке, температуру части пипетки, давление атмосферы в пипетке, давление внутри полости пипетки, влажность воздуха в пипетке, вязкость регулируемой жидкости. Например, когда пользователь работает с пипеткой долгое время, пипетка нагревается от контакта с рукой пользователя, так что работа пипетки изменяется из-за теплового расширения некоторых составных частей. На основе указанной процедуры, точность пипетки может поддерживаться, когда пипетка нагревается, и, в сущности, точность пипетки поддерживается в широком диапазоне рабочих условий пипетки. Пипетка может регулироваться автоматически. В альтернативном случае выведенный на дисплей корректировочный объем может указать пользователю на изменение, и пользователь может вручную регулировать пипетку. Так как пипетка корректируется после изготовления, требуемая точность изготовления пипетки может быть ослаблена. В результате изготовление пипетки может быть упрощено и требовать меньших затрат. Различные расширения механической системы, которые обычно вызывают погрешности в изменении объема проб, непосредственно влияющие на количество взятой пробы, также смягчаются. Могут быть включены последовательные коррекции, чтобы учесть многочисленные физические условия.The calibration process shown in FIG. 5 and the use procedure shown in FIG. 10 correct the amount of fluid controlled in the pipette due to the capillarity occurring at a low volume required, due to the weight of the liquid column at a large volume required, due to the imperfect manufacturing of the components parts of the pipette, due to the type of pipette tip and due to the physical conditions in the pipette, which include the temperature of the air in the pipette, the temperature of the pipette part, the pressure of the atmosphere in the pipette, the pressure in the inside of the pipette cavity, the humidity in the pipette, the viscosity of the controlled fluid. For example, when the user has been using the pipette for a long time, the pipette heats up from contact with the user's hand, so that the operation of the pipette changes due to thermal expansion of some components. Based on this procedure, pipette accuracy can be maintained when the pipette is heated, and, in essence, pipette accuracy is maintained over a wide range of pipette operating conditions. The pipette can be adjusted automatically. Alternatively, the correction volume displayed may indicate to the user a change, and the user may manually adjust the pipette. Since the pipette is adjusted after manufacture, the required accuracy of the manufacture of the pipette can be weakened. As a result, pipetting can be simplified and less costly. Various extensions of the mechanical system, which usually cause errors in the change in sample volume, directly affecting the amount of sample taken, are also mitigated. Sequential corrections may be included to account for multiple physical conditions.
На фиг.11-16 показаны примерные конфигурации датчиков, которые обеспечивают параметры для использования в качестве входных параметров для характеристики объема. На фиг.8 показан второй примерный вариант пипетки 200. Пипетка дополнительно включает температурный датчик 340, прикрепленный рядом с корпусом 232 механизма 206. Датчик 340 расположен с обеспечением измерения температуры части пипетки 200. В примерном варианте выполнения датчик 340 расположен близко к управляющему штоку 226, опоре 230 управляющего штока и схеме 218. Схема 218 может создавать тепло, которое может вызвать расширение некоторых составных частей механизма 206. Датчик 340 крепится близко к частям, наиболее подверженным тепловому расширению, таким образом, позволяя знать температуру механических составных частей, входящих в последовательность взятия проб. Датчик 340 связан электрическими соединительными проводами 342 со схемой 218, чтобы с помощью процессора регулировать температуру, измеренную датчиком.11-16, exemplary sensor configurations are provided that provide parameters for use as input parameters for a volume characteristic. Fig. 8 shows a second exemplary embodiment of the
Эта регулировка может выполняться согласно процедуре, показанной на фиг.11, используя в качестве параметра температуру, измеренную датчиком. Во время калибровки пипетки обычно работают для забора/выдачи жидкости приблизительно при 20°С. Если пользователь регулирует жидкость не при 20°С, регулируемый объем не будет соответствовать значению, показанному на дисплее пипетки. Выданный или забранный объем может отличаться от требуемого объема по разным причинам. Основной причиной этой ошибки является нагревание "мертвого" объема внутри пипетки, что благодаря его расширению заставляет пользователя отмерять меньше жидкости, чем отмерялось бы с предполагаемой регулировкой. Зная, что результаты калибровки, особенно те, которые используются для установки номинального объема пробы, даны для пипетки при 20°С, процессор определяет, требуется ли корректировка этого номинального значения в зависимости от температуры, определенной датчиком 340, и характеристики объема, основанной на температуре.This adjustment can be performed according to the procedure shown in FIG. 11, using as a parameter the temperature measured by the sensor. During calibration, pipettes typically operate to draw / dispense fluid at approximately 20 ° C. If the user does not adjust the liquid at 20 ° C, the adjustable volume will not correspond to the value shown on the pipette display. The dispensed or withdrawn volume may differ from the required volume for various reasons. The main reason for this error is the heating of the "dead" volume inside the pipette, which, due to its expansion, causes the user to measure out less liquid than would be measured with the proposed adjustment. Knowing that the calibration results, especially those used to set the nominal sample volume, are for a pipette at 20 ° C, the processor determines whether it is necessary to adjust this nominal value depending on the temperature detected by the 340 sensor and the temperature-based volume characteristic. .
На фиг.12 показан третий примерный вариант выполнения пипетки 200. Пипетка дополнительно включает датчик 350 атмосферного давления, установленный рядом с механизмом 206. В этом примере датчик установлен над батареей 212. Датчик 350 измеряет атмосферное давление и посылает информацию процессору, чтобы корректировать регулируемый объем, как описано ранее. Пипетка может дополнительно включать датчик 352 окружающей температуры, прикрепленный снаружи держателя наконечника вблизи наконечника. При таком расположении датчик 352 измеряет температуру вблизи регулируемой жидкости, позволяя осуществлять хорошую аппроксимацию температуры жидкости, даже если датчик находится в контакте только с воздухом над жидкостью. Датчик 352 проходит через поверхность держателя наконечника до внутренней трубки 356, чтобы измерять температуру воздуха вблизи регулируемой жидкости. Датчик 352 соединен электрическими проводами 354 со схемой 218, чтобы процессор мог осуществлять регулировку в соответствии с температурой, измеренной датчиком. В другом альтернативном варианте выполнения к пипетке может быть прикреплен датчик влажности, расположенный так же, как это описано по отношению к датчику 350.12 shows a third exemplary embodiment of the
На фиг.13 показан четвертый примерный вариант выполнения. Пипетка дополнительно включает датчик 360 температуры воздуха, прикрепленный к нижней трубке держателя 210 наконечника. Датчик 360 образует кольцо у нижней трубки держателя наконечника, что позволяет поместить его в цилиндрический корпус, расположенный у нижней оконечности держателя наконечника. Датчик 360 имеет внутреннюю стенку, идентичную тору, образующую кривую в виде окружности с центром, расположенным на стенке, противоположной продольной оси А-А пипетки, как показано на фиг.14. Образованный ограниченный воздушный проход создает увеличенную скорость воздуха через датчик 360, а также удаление жидкости посредством эжекции. Датчик 360 соединен электрическими проводами 362 со схемой 218, чтобы процессор мог осуществлять регулирование в соответствии с температурой, измеренной датчиком.13 shows a fourth exemplary embodiment. The pipette further includes an
На фиг.15 показан пятый примерный вариант выполнения пипетки. Пипетка дополнительно включает датчик 370 температуры воздуха, прикрепленный к подвижной части в пипетке. Датчик 370 прикреплен непосредственно к концу штока 224 поршня. При таком расположении датчик 370 не контактирует с регулируемой жидкостью. Датчик 370 соединен электрическими соединительными проводами 372 со схемой 218, чтобы процессор мог осуществлять регулировку в соответствии с температурой, измеренной датчиком. На фиг.16 провод 372 соединен с двумя металлическими полосами 374, 376, расположенными одна над другой перпендикулярно продольной оси А-А пипетки и у головки поршня. Металлические полосы 374, 376 находятся соответственно в контакте с двумя пластинами 378, 380, прикрепленными к кожуху пипетки. Такое расположение позволяет осуществить непрерывный электрический контакт между процессором и датчиком 370, несмотря на вращение штока поршня.On Fig shows a fifth exemplary embodiment of the pipette. The pipette further includes an
Примерные варианты выполнения настоящего изобретения представляют пипетку, способную точно набирать или выдавать объемы жидкости при различных окружающих условиях работы, используя разнообразные вязкие жидкости и типы наконечников, в широком диапазоне объемов, несмотря на механические погрешности при изготовлении пипетки. Примерные операции могут выполняться при использовании либо пипетки без электропривода, либо пипетки с электроприводом. Понятно, что изобретение не ограничивается частными вариантами, представленными здесь в качестве примеров, но охватывает все такие модификации, комбинации и изменения, которые находятся в пределах объема пунктов формулы изобретения. Описанные функциональные свойства могут распределяться среди составных частей, отличающихся числом и распределением функциональных свойств от описанных здесь, не отклоняясь от сути изобретения. Кроме того, порядок выполнения работы модулей может изменяться без отклонения от сущности изобретения. Таким образом, описание предпочтительных вариантов выполнения дано в целях иллюстрации, а не для ограничения.Exemplary embodiments of the present invention provide a pipette capable of accurately collecting or dispensing volumes of liquid under various environmental conditions, using a variety of viscous liquids and types of tips, over a wide range of volumes, despite mechanical errors in the manufacture of the pipette. Exemplary operations can be performed using either a pipette without an electric drive, or a pipette with an electric drive. It is understood that the invention is not limited to the particular embodiments presented here as examples, but covers all such modifications, combinations, and changes that fall within the scope of the claims. The described functional properties can be distributed among components that differ in the number and distribution of functional properties from those described here, without deviating from the essence of the invention. In addition, the execution order of the modules can be changed without deviating from the essence of the invention. Thus, a description of the preferred embodiments is given for purposes of illustration and not limitation.
Claims (26)
Translated fromRussianвыбор требуемого объема в пипетке, содержащей приводной механизм поршня, выполненный с возможностью контактирования с поршневым узлом с обеспечением перемещения штока поршня указанного узла в держателе наконечника с обеспечением тем самым регулирования количества жидкости в держателе наконечника, причем требуемый объем представляет собой количество регулируемой жидкости;
вычисление корректировочного объема с использованием характеристики объема, которая характеризует отличие количества жидкости, регулируемой в держателе наконечника, как функцию требуемого объема, причем характеристику объема определяют с использованием процесса калибровки; и вывод на дисплей корректировочного объема для пользователя пипетки.1. A method of controlling the required volume of liquid in a pipette designed to work with liquid, by adjusting depending on the current physical parameter of the pipette, including:
the selection of the required volume in the pipette containing the piston drive mechanism, configured to contact the piston assembly to allow the piston rod of the said assembly to move in the tip holder, thereby controlling the amount of liquid in the tip holder, the required volume being the amount of adjustable fluid;
calculating a correction volume using a volume characteristic that characterizes the difference in the amount of fluid adjustable in the tip holder as a function of the required volume, the volume characteristic being determined using a calibration process; and displaying the correction volume for the pipette user.
причем характеристика объема характеризует отличие количества жидкости, регулируемой в держателе наконечника, как функцию указанного параметра.2. The method according to claim 1, in which additionally determine the parameter, which is the current physical parameter in the pipette;
moreover, the characteristic of the volume characterizes the difference in the amount of fluid, adjustable in the holder of the tip, as a function of the specified parameter.
множество точек данных, каждая из которых включает
точку данных о калибровочном объеме, которая представляет собой объем регулируемой жидкости и которую выбирают как часть процесса калибровки пипетки; и
корректировочный объем, который представляет собой количество жидкости, регулируемой в держателе наконечника, в точке данных о калибровочном объеме.11. The method according to claim 1, in which the characteristic of the volume is a table containing:
many data points, each of which includes
a calibration volume data point, which is the volume of the controlled fluid and which is selected as part of the pipette calibration process; and
adjustment volume, which is the amount of fluid adjustable in the tip holder, at the point of calibration volume data.
множество точек данных, каждая из которых включает
точку данных о калибровочном объеме, которая представляет собой объем регулируемой жидкости и которую выбирают как часть процесса калибровки пипетки; и
корректировочный объем, который представляет собой различие между точкой данных о калибровочном объеме и действительным объемом, представляющим собой количество жидкости, регулируемой в держателе наконечника, в точке данных о калибровочном объеме.12. The method according to claim 1, in which the characteristic of the volume is a table containing:
many data points, each of which includes
a calibration volume data point, which is the volume of the controlled fluid and which is selected as part of the pipette calibration process; and
adjustment volume, which is the difference between the calibration volume data point and the actual volume representing the amount of fluid adjustable in the tip holder at the calibration volume data point.
кожух;
держатель наконечника, прикрепленный к кожуху;
поршневой узел, прикрепленный к держателю наконечника и содержащий шток поршня, размещенный в держателе наконечника;
приводной механизм поршня, который не имеет электропривод и содержит управляющий шток, имеющий поверхность, контактирующую с поршневым узлом, и который выполнен с возможностью перемещения штока поршня поршневого узла в держателе наконечника с обеспечением регулирования жидкости в указанном держателе;
приспособление для выбора объема, прикрепленное к кожуху и выполненное с обеспечением возможности выбора пользователем требуемого объема, представляющего собой количество регулируемой жидкости;
дисплей, прикрепленный к кожуху;
процессор, соединенный с дисплеем и с приспособлением для выбора объема и выполненный с возможностью вычисления корректировочного объема с использованием характеристики объема, которая характеризует отличие количества жидкости, регулируемой в держателе наконечника, как функцию требуемого объема, и которая определяется с использованием процесса калибровки;
причем дисплей показывает корректировочный объем пользователю пипетки.14. A device for regulating the required volume of liquid in a pipette designed to work with liquid, by adjusting depending on the current physical parameter in the pipette, containing:
casing;
a tip holder attached to the casing;
a piston assembly attached to the tip holder and comprising a piston rod disposed in the tip holder;
a piston drive mechanism that does not have an electric drive and contains a control rod having a surface in contact with the piston assembly, and which is configured to move the piston rod of the piston assembly in the tip holder to provide fluid control in said holder;
a volume selection device attached to the casing and configured to allow a user to select a desired volume, which is an amount of an adjustable fluid;
a display attached to the casing;
a processor connected to the display and with a volume selection device and configured to calculate an adjustment volume using a volume characteristic that characterizes the difference in the amount of liquid adjustable in the tip holder as a function of the required volume, and which is determined using the calibration process;
moreover, the display shows the correction volume to the user of the pipette.
индикатор физического параметра, прикрепленный к части устройства и выполненный с возможностью указания текущего физического параметра устройства;
причем процессор соединен с индикатором физического параметра, а характеристика объема также характеризует отличие количества жидкости, регулируемой в держателе наконечника, как функцию указанного индикатором текущего физического параметра.15. The device according to 14, further comprising:
an indicator of a physical parameter attached to a part of the device and configured to indicate the current physical parameter of the device;
moreover, the processor is connected to an indicator of a physical parameter, and the volume characteristic also characterizes the difference in the amount of liquid, adjustable in the tip holder, as a function of the current physical parameter indicated by the indicator.
наконечник, прикрепленный к держателю наконечника;
причем индикатор физического параметра является индикатором типа наконечника.16. The device according to clause 15, further comprising:
a tip attached to a tip holder;
moreover, the indicator of the physical parameter is an indicator of the type of tip.
множество точек данных, каждая из которых включает
точку данных о калибровочном объеме, которая представляет собой объем регулируемой жидкости и которая выбирается как часть процесса калибровки пипетки; и
корректировочный объем, который представляет собой количество жидкости, регулируемой в держателе наконечника, в точке данных о калибровочном объеме.24. The device according to 14, in which the characteristic of the volume is a table containing:
many data points, each of which includes
a calibration volume data point, which is the volume of the controlled fluid and which is selected as part of the pipette calibration process; and
adjustment volume, which is the amount of fluid adjustable in the tip holder, at the point of calibration volume data.
множество точек данных, каждая из которых включает точку данных о калибровочном объеме, которая представляет собой объем регулируемой жидкости и которая выбирается как часть процесса калибровки пипетки; и
корректировочный объем, который представляет собой различие между точкой данных о калибровочном объеме и действительным объемом, представляющим собой количество жидкости, регулируемой в держателе наконечника, в точке данных о калибровочном объеме.25. The device according to 14, in which the characteristic of the volume is a table containing:
a plurality of data points, each of which includes a data point about the calibration volume, which is the volume of the adjustable fluid and which is selected as part of the pipette calibration process; and
adjustment volume, which is the difference between the calibration volume data point and the actual volume representing the amount of fluid adjustable in the tip holder at the calibration volume data point.
Applications Claiming Priority (11)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR0313920AFR2862888B1 (en) | 2003-11-27 | 2003-11-27 | METHOD FOR DISPLAYING A VALUE OF A VOLUME OF A LIQUID SAMPLE TO BE TAKEN WITH A PIPETTE, WITH IMPROVED PRECISION |
| FR0313921AFR2862889B1 (en) | 2003-11-27 | 2003-11-27 | HAND PIPETTE FOR THE COLLECTION OF A LIQUID SAMPLE WITHOUT A TEMPERATURE DERIVATIVE |
| FR0313921 | 2003-11-27 | ||
| FR0313920 | 2003-11-27 | ||
| FR0402433 | 2004-03-09 | ||
| FR0409438 | 2004-09-07 | ||
| FR0409443 | 2004-09-07 | ||
| FR0409442 | 2004-09-07 | ||
| FR0409442AFR2862890B1 (en) | 2003-11-27 | 2004-09-07 | PIPETTE COMPRISING MEANS FOR TRANSMITTING INFORMATION |
| FR0409443AFR2874840B1 (en) | 2004-09-07 | 2004-09-07 | PIPETTE COMPRISING A CONTROL WHEEL |
| US10/944,532 | 2004-09-17 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2006122511A RU2006122511A (en) | 2008-01-10 |
| RU2353426C2true RU2353426C2 (en) | 2009-04-27 |
Family
ID=39019737
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2006122511/04ARU2353426C2 (en) | 2003-11-27 | 2004-11-24 | Method and system for accurate measurement of liquid in pipette for liquid sampling |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2353426C2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20200292374A1 (en)* | 2019-03-11 | 2020-09-17 | Mettler-Toledo Gmbh | Method for the verification of pipettes |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4586546A (en)* | 1984-10-23 | 1986-05-06 | Cetus Corporation | Liquid handling device and method |
| US5187990A (en)* | 1984-02-16 | 1993-02-23 | Rainin Instrument Co., Inc. | Method for dispensing liquids with a pipette with compensation for air pressure and surface tension |
| RU2028180C1 (en)* | 1992-04-29 | 1995-02-09 | Игорь Михайлович Бирюков | Pipet |
| US5481900A (en)* | 1992-03-25 | 1996-01-09 | Eppendorf-Netheler-Hinz Gmbh | Pipette system |
| US5531131A (en)* | 1993-10-21 | 1996-07-02 | Eppendorf-Netheler-Hinz Gmbh | Device for adjusting correction factor of a plunger lift pipet |
- 2004
- 2004-11-24RURU2006122511/04Apatent/RU2353426C2/ennot_activeIP Right Cessation
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5187990A (en)* | 1984-02-16 | 1993-02-23 | Rainin Instrument Co., Inc. | Method for dispensing liquids with a pipette with compensation for air pressure and surface tension |
| US4586546A (en)* | 1984-10-23 | 1986-05-06 | Cetus Corporation | Liquid handling device and method |
| US5481900A (en)* | 1992-03-25 | 1996-01-09 | Eppendorf-Netheler-Hinz Gmbh | Pipette system |
| RU2028180C1 (en)* | 1992-04-29 | 1995-02-09 | Игорь Михайлович Бирюков | Pipet |
| US5531131A (en)* | 1993-10-21 | 1996-07-02 | Eppendorf-Netheler-Hinz Gmbh | Device for adjusting correction factor of a plunger lift pipet |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20200292374A1 (en)* | 2019-03-11 | 2020-09-17 | Mettler-Toledo Gmbh | Method for the verification of pipettes |
| US11781899B2 (en)* | 2019-03-11 | 2023-10-10 | Mettler-Toledo Gmbh | Method for the verification of pipettes |
Also Published As
| Publication number | Publication date |
|---|---|
| RU2006122511A (en) | 2008-01-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20080271514A1 (en) | System and Method for Precise Liquid Measurement in a Liquid Sampling Pipette | |
| EP2762843A1 (en) | Calibration system and method | |
| US20090055131A1 (en) | Automatic recording volume measurement apparatus | |
| JP5996613B2 (en) | Improvement of thermocycler for PCR | |
| JP5706086B2 (en) | Hand-held pipette device | |
| US5895838A (en) | Method for correcting a liquid dispensing error, and a liquid dispensing device | |
| US5785926A (en) | Precision small volume fluid processing apparatus | |
| JP5378383B2 (en) | Aspiration and dispensing of small amounts of liquid | |
| CN1956786A (en) | Systems and methods for accurately measuring liquids in liquid sampling pipettes | |
| EP3083058B1 (en) | Electronic pipette | |
| RU2353426C2 (en) | Method and system for accurate measurement of liquid in pipette for liquid sampling | |
| EP2638383A1 (en) | Rheometer standardisation | |
| JP2007512128A (en) | Hand-held pipette for collecting liquid samples without temperature drift | |
| CN113145193B (en) | Method for operating a piston stroke pipette, data processing device and system | |
| JP2006515672A (en) | Precision control thermostat | |
| RU2340397C2 (en) | Electronic pipette with display and manipulator for controlling liquid suction and distribution | |
| RU2142849C1 (en) | Method of correction of temperature-dependent error of liquid metering and liquid metering device | |
| US20060144168A1 (en) | Pipetting device | |
| CN222887635U (en) | A hose sample adding system | |
| CN207271279U (en) | Electronic craft sample injector and its feedback regulation device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees | Effective date:20091125 |