RU2297673C1 - Method for tracking objects and controlling their condition and system for realization of said method - Google Patents
Method for tracking objects and controlling their condition and system for realization of said methodDownload PDFInfo
- Publication number
- RU2297673C1 RU2297673C1RU2006127941/11ARU2006127941ARU2297673C1RU 2297673 C1RU2297673 C1RU 2297673C1RU 2006127941/11 ARU2006127941/11 ARU 2006127941/11ARU 2006127941 ARU2006127941 ARU 2006127941ARU 2297673 C1RU2297673 C1RU 2297673C1
- Authority
- RU
- Russia
- Prior art keywords
- unit
- tracking
- block
- zoning
- tracking system
- Prior art date
Links
Images


Classifications
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/20—Monitoring the location of vehicles belonging to a group, e.g. fleet of vehicles, countable or determined number of vehicles
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Selective Calling Equipment (AREA)
- Mobile Radio Communication Systems (AREA)
Abstract
Description
Translated fromRussianГруппа изобретений относится к технике слежения за мобильными и стационарными объектами и дистанционного управления их состоянием и может быть использована, например, при слежении за маршрутами транспортных средств и управлении состоянием бензоколонок.The group of inventions relates to techniques for tracking mobile and stationary objects and remote control of their condition and can be used, for example, when tracking vehicle routes and controlling the state of gas stations.
Известны способы слежения за объектами и управления их состоянием, предусматривающие определение координат объектов слежения, например, по данным навигационных сигналов, принимаемых от спутников глобальной системы позиционирования (GPS) и/или по картине поля сотовой связи, формирование пакета информации с включением в него сообщений о состоянии объектов, обработку информации, отображение результатов слежения на электронной карте местности и управление объектами по заданной программе. Для осуществления указанных способов используются, в частности, установленные на объектах слежения следящие системы с датчиками параметров, приемопередатчиками сигналов и команд, средствами анализа и обработки информации и органами управления (RU 2273055 С1, G 08 G 1/137, 27.03.2006; RU 2279139 С2, G 08 G 1/123, 27.06.2006; RU 28786 U1, G 08 G 1/123, 10.04.2003).Known methods for tracking objects and controlling their state, providing for the determination of the coordinates of tracking objects, for example, according to navigation signals received from satellites of the global positioning system (GPS) and / or according to the picture of the cellular field, the formation of an information package with the inclusion of messages about the state of objects, information processing, displaying tracking results on an electronic map of the area, and managing objects according to a given program. To implement these methods, in particular, tracking systems installed on tracking objects with parameter sensors, signal transceivers and commands, information analysis and processing tools and controls (RU 2273055 C1, G 08
Недостатки известных способов слежения за объектами и управления их состоянием, а также следящих систем определяются невозможностью:The disadvantages of the known methods of tracking objects and managing their condition, as well as tracking systems, are determined by the impossibility of:
- учета событий различного уровня сложности, что приводит в конечном итоге к неэффективному расходу собственных энергоинформационных ресурсов следящих систем, установленных на объектах слежения;- taking into account events of various difficulty levels, which ultimately leads to an inefficient consumption of their own energy and information resources of tracking systems installed at tracking facilities;
- оперативного и автономного управления состоянием объекта, на котором установлена следящая система;- operational and autonomous control of the state of the object on which the tracking system is installed;
- проведения многоуровневой и соответствующей текущему состоянию объекта адаптации следящей системы, в том числе, автономно;- conducting a multilevel and corresponding to the current state of the adaptation object of the tracking system, including autonomously;
- снижения объема передаваемой по каналам связи информации с сохранением высокого уровня ее достоверности и уменьшения затрат на трафик обмена.- reducing the amount of information transmitted through communication channels while maintaining a high level of its reliability and reducing the cost of exchange traffic.
Техническим результатом от использования настоящей группы изобретений является обеспечение возможности оперативного и автономного управления состоянием объекта, на котором установлена следящая система, в условиях проведения многоуровневой и соответствующей текущему состоянию объекта адаптации следящей системы, а также уменьшение объема передаваемой по каналам связи информации при снижении расхода собственных энергоинформационных ресурсов следящих систем, повышении уровня достоверности передаваемой информации и уменьшении затрат на трафик обмена.The technical result from the use of this group of inventions is the possibility of operational and autonomous control of the state of the object on which the tracking system is installed, in conditions of a multilevel and corresponding to the current state of adaptation object of the tracking system, as well as reducing the amount of information transmitted through communication channels while reducing the consumption of own energy information resources of tracking systems, increasing the reliability level of transmitted information and reducing costs al on traffic exchanges.
При изложении сущности заявленных технических решений использованы следующие термины и определения.When describing the essence of the claimed technical solutions, the following terms and definitions are used.
Состояние неподвижного объекта - это совокупность учитываемых параметров (характеристик) объекта, не меняющего координаты своего расположения.The state of a stationary object is a set of parameters taken into account (characteristics) of an object that does not change the coordinates of its location.
Состояние движущегося объекта - это параметры перемещения объекта по картированной поверхности и параметры (характеристики) этого объекта, не связанные с его перемещением по картированной поверхности.The state of a moving object is the parameters for moving the object along the mapped surface and the parameters (characteristics) of this object that are not related to its movement along the mapped surface.
Стационарное состояние движущегося объекта - это та часть параметров (характеристик) объекта, которая не связана с его перемещением по картированной поверхности.The stationary state of a moving object is that part of the parameters (characteristics) of the object that is not related to its movement along the mapped surface.
Картирование поверхности - изображение поверхности в виде карты.Surface mapping - a surface image in the form of a map.
Активный сценарий перемещения движущегося объекта - это сценарий перемещения, параметры которого заданы в следящей системе, причем проверяется соответствие реального перемещения объекта этому сценарию.The active scenario of moving a moving object is a movement scenario, the parameters of which are set in the tracking system, and the correspondence of the real movement of the object to this scenario is checked.
Активный сценарий изменения стационарного состояния движущегося объекта - это сценарий изменения состояния объекта, параметры которого не учитывают перемещения объекта, определены в следящей системе, причем системой проверяется соответствие реального изменения состояния объекта этому сценарию.The active scenario of changing the stationary state of a moving object is a scenario of changing the state of an object, the parameters of which do not take into account the movement of the object, are determined in the tracking system, and the system checks whether the real change in the state of the object corresponds to this scenario.
Пассивный сценарий перемещения движущегося объекта - это сценарий, параметры которого заданы в системе, но проверка соответствия реального перемещения объекта этому сценарию не производится.A passive scenario for moving a moving object is a scenario whose parameters are set in the system, but the real movement of the object is not checked for this scenario.
Пассивный сценарий изменения стационарного состояния движущегося объекта - это сценарий изменения состояния объекта, параметры которого не учитывают перемещения объекта, определены в системе, но проверка системой соответствия реального изменения состояния объекта этому сценарию не производится.A passive scenario for changing the stationary state of a moving object is a scenario for changing the state of an object, the parameters of which do not take into account the movement of the object, are defined in the system, but the system does not check for the real change in the state of the object to this scenario.
Локальный сценарий изменения состояния объекта - сценарий одного параметра, значение которого определено однократно или с периодическим повторением.A local scenario of changing the state of an object is a scenario of one parameter, the value of which is determined once or with periodic repetition.
Последовательный сценарий изменения состояния объекта - сценарий группы параметров, значения которых определены последовательно во времени.A sequential scenario of changing the state of an object is a scenario of a group of parameters whose values are determined sequentially in time.
Параллельные сценарии изменения состояния объекта - сценарий группы параметров, значения которых определены параллельно во времени.Parallel scenarios of changing the state of an object - a scenario of a group of parameters whose values are determined in parallel in time.
Указанный технический результат достигается способом слежения за объектами и управления их состоянием, согласно которому на совокупности объектов, подлежащих слежению, устанавливают следящие системы с блоками памяти, внутренними часами, блоками управления исполнительными устройствами, блоками приема сигналов с датчиков, блоками приема и/или передачи информационных сигналов, блоками зонирования и сравнения сценариев, блоками принятия решений и блоками настройки, а также непосредственно взаимодействующие со следящей системой устройства - датчики, излучатель и приемник излучений, разъем, микрофон, динамик, дисплей, исполнительные устройства и отдельный источник питания, а вне объектов слежения - внешние источники команд и/или управляющих данных и/или внешние приемники информации, связанные с упомянутыми блоками передачи и/или приема информационных сигналов каналами связи, картируют поверхности возможного расположения или перемещения объектов слежения, разбивают картированные поверхности на координатные активные и/или пассивные зоны в соответствии с совокупностью прогнозируемых в них простых и сложных событий, устанавливают соответствие между объектами слежения и полученными зонами, для каждого из объектов слежения выбирают оператором и/или следящей системой совокупность информативных признаков, характеризующих возможные события, для каждого из объектов слежения определяют базовые активные и пассивные сценарии возможных перемещений или состояний, в процессе слежения за объектом регистрируют сигналы с его датчиков и временные параметры и обрабатывают их трактами следящей системы для установленного режима ее функционирования, посредством оперативной многопараметрической настройки проводят многоуровневую и соответствующую текущему состоянию объекта слежения адаптацию следящей системы, формируют управляющие команды, передают и принимают информационные сообщения, сравнивают зарегистрированные активные сценарии перемещений и/или изменений состояний объектов слежения с базовыми, на основании результатов сравнения принимают итоговое решение о посылке сообщения о пересечении объектом слежения зонных границ и/или изменении базового сценария перемещения объекта или его состояния внешним приемникам информации, и/или об изменении настройки следящей системы, и/или о посылке управляющих сообщений на объект слежения, блокирующих режим его функционирования.The specified technical result is achieved by the method of tracking objects and controlling their state, according to which on the set of objects to be monitored, follow-up systems are installed with memory units, internal clocks, control units for executive devices, signal reception units from sensors, information reception and / or transmission units signals, zoning and scenario comparison blocks, decision blocks and tuning blocks, as well as devices directly interacting with the tracking system tva - sensors, emitter and radiation receiver, connector, microphone, speaker, display, actuators and a separate power source, and outside the tracking objects - external sources of commands and / or control data and / or external information receivers associated with the said transmission units and / or receiving information signals by communication channels, map the surfaces of the possible location or movement of tracking objects, divide the mapped surfaces into coordinate active and / or passive zones in accordance with the totality simple and complex events predicted in them, establish a correspondence between the tracking objects and the received zones, for each of the tracking objects, the operator and / or the tracking system select a set of informative features characterizing possible events, for each of the tracking objects determine the basic active and passive scenarios of possible movements or states, in the process of tracking the object register signals from its sensors and time parameters and process them with the tracking system paths to establish In order to ensure its operational mode, by means of an operational multi-parameter setting, the tracking system is multi-level and adapted to the current state of the tracking object, control commands are generated, information messages are transmitted and received, registered active scenarios of movements and / or changes in the state of tracking objects are compared with the base ones, based on the comparison results make the final decision about sending a message about the object crossing the zone boundaries and / or treason the basic scenario of moving the object or its state to external information receivers, and / or about changing the settings of the tracking system, and / or about sending control messages to the tracking object that block its operation mode.
Кроме того, зоны картированных поверхностей формируют в виде совокупности кругов с переменными либо постоянными координатами их центров и/или в виде колец с переменными либо постоянными координатами их центров и переменными либо постоянными внутренними и внешними радиусами, и/или в виде многоугольников с произвольным числом сторон.In addition, the zones of the mapped surfaces are formed as a set of circles with variables or constant coordinates of their centers and / or in the form of rings with variables or constant coordinates of their centers and variables or constant internal and external radii, and / or in the form of polygons with an arbitrary number of sides .
Для зон картированных поверхностей в виде совокупности колец и/или многоугольников устанавливают минимальное количество последовательных подтверждений пересечения объектом слежения внешних границ зон и для принятия итогового решения дополнительно сравнивают с установленным минимальным значением количество зарегистрированных последовательных подтверждений указанного пересечения.For zones of mapped surfaces in the form of a set of rings and / or polygons, the minimum number of consecutive confirmations of the intersection of the tracking object of the outer boundaries of the zones is set and, for the final decision, the number of registered consecutive confirmations of the specified intersection is additionally compared with the set minimum value.
Минимальное значение последовательных подтверждений пересечения объектом слежения внешних границ зон устанавливают не менее трех за фиксированный или нефиксированный промежуток времени.The minimum value of successive confirmations of the intersection of the tracking object of the external borders of the zones is set at least three for a fixed or non-fixed period of time.
Кроме того, прием и/или передачу информационных сигналов в каналах связи между следящей системой и внешним источником команд и/или управляющих данных, а также между следящей системой и внешним приемником информации осуществляют с использованием излучателя и/или приемника излучений и/или с использованием проводной линии связи.In addition, the reception and / or transmission of information signals in communication channels between the servo system and an external source of commands and / or control data, as well as between the servo system and an external information receiver, is carried out using a radiator and / or radiation receiver and / or using a wired communication lines.
Кроме того, многоуровневую адаптацию следящей системы проводят автономно средствами следящей системы или внешними источниками команд и/или управляющих данных.In addition, multi-level adaptation of the tracking system is carried out autonomously by means of a tracking system or external sources of commands and / or control data.
Кроме того, в качестве внешнего источника команд и/или управляющих данных используют терминал и/или интерфейс оператора, установленный на компьютере, и/или модем, и/или микрофон, и/или телефон.In addition, a terminal and / or an operator interface installed on a computer, and / or a modem, and / or a microphone, and / or a telephone are used as an external source of commands and / or control data.
Интерфейс оператора выполняют с картографической базой данных.The operator interface is performed with a cartographic database.
Кроме того, в качестве внешнего приемника информации используют динамик, и/или дисплей, и/или табло, и/или лампу, и/или пульт контроля.In addition, a speaker, and / or a display, and / or a board, and / or a lamp, and / or a control panel are used as an external information receiver.
В качестве пульта контроля используют терминал и/или интерфейс оператора, установленный на компьютере, и/или модем, и/или телефон.As the control panel, a terminal and / or an operator interface installed on a computer and / or a modem and / or telephone are used.
Кроме того, в качестве прогнозируемых простых событий рассматривают нахождение объекта слежения, на котором установлена следящая система, в определенном состоянии в течение заданного интервала времени, расположение объекта слежения вне/внутри картографической зоны, пересечение объектом слежения границы активной картографической зоны с подтверждением факта пересечения несколько раз подряд, превышение порогового уровня величиной скорости движения объекта, на котором установлена следящая система, установление значения напряжения на выходе источника питания ниже порогового уровня, установление значения сигнала на выходе датчика выше или ниже порогового уровня, установление значения сигнала на выходе дублирующего датчика выше или ниже порогового уровня, нахождение исполнительного устройства в определенном состоянии, регистрацию факта перезапуска программы следящей системы, регистрацию факта сбоя в работе следящей системы.In addition, as predicted simple events, it is considered that the tracking object, on which the tracking system is installed, in a certain state for a given time interval, the location of the tracking object outside / inside the cartographic zone, the tracking facility intersects the border of the active cartographic zone with confirmation of the fact of intersection several times in a row, exceeding the threshold level by the speed of the object on which the tracking system is installed, setting the voltage value to the output of the power supply is below the threshold level, setting the signal value at the sensor output above or below the threshold level, setting the signal value at the output of the backup sensor above or below the threshold level, finding the actuator in a certain state, registering the fact of restarting the tracking system program, registering the fact of failure the work of the tracking system.
Кроме того, в качестве прогнозируемых сложных событий рассматривают одновременное (одномоментное) выполнение нескольких простых событий, детерминированную последовательность во времени простых событий, детерминированную последовательность во времени одновременных сложных событий, сочетание перечисленных видов сложных событий.In addition, simultaneous (simultaneous) execution of several simple events, a deterministic time sequence of simple events, a deterministic time sequence of simultaneous complex events, and a combination of these types of complex events are considered as predicted complex events.
Технический результат достигается также следящей системой для реализации способа слежения за объектами и управления их состоянием, содержащей блок памяти, внутренние часы, блок управления исполнительными устройствами, блок приема сигналов с датчиков, выполненный с последовательно соединенными узлом пороговых уровней датчиков, узлом преобразования и сравнения, представляющим собой совокупность преобразователей-компараторов, количество которых равно количеству датчиков, и узлом обработки, представляющим собой совокупность субблоков временных параметров, количество которых равно количеству преобразователей-компараторов, а также с конфигуратором датчиков, подключенным к узлу пороговых уровней датчиков и узлу обработки, блок приема и/или передачи информационных сигналов, выполненный с узлом голосовой связи, а также с узлом интерфейса приема и передачи данных, соединенным с узлом обработки входных команд и/или управляющих данных и узлом формирования выходных сообщений, блок зонирования и сравнения сценариев, выполненный с узлом обработки входных сигналов, подключенным к узлу точечного зонирования и сравнения локальных сценариев, узлу кругового зонирования и сравнения последовательных сценариев, узлу полигонального зонирования и сравнения параллельных сценариев, каждый из которых дополнительно подключен к узлу обработки результатов зонирования и сравнения сценариев, блок принятия решений, выполненный с соединенными между собой узлом обработки событий и узлом анализа сигналов, и блок настройки, выполненный с узлом настройки датчиков, узлом настройки блока зонирования и сравнения сценариев, узлом настройки блока принятия решений и узлом настройки блока приема и/или передачи информационных сигналов, каждый из которых подключен к узлу установки режимов работы системы, при этом блок приема и/или передачи информационных сигналов соединен с блоком зонирования и сравнения сценариев, блоком памяти, блоком приема сигналов с датчиков, блоком принятия решений, внутренними часами и блоком настройки, блок памяти дополнительно соединен с блоком зонирования и сравнения сценариев и блоком настройки, внутренние часы дополнительно соединены с блоком зонирования и сравнения сценариев, блоком принятия решений, блоком приема сигналов с датчиков и блоком настройки, блок приема сигналов с датчиков дополнительно соединен с блоком зонирования и сравнения сценариев и блоком настройки, блок принятия решений дополнительно соединен с блоком управления исполнительными устройствами, блоком зонирования и сравнения сценариев и блоком настройки, блок зонирования и сравнения сценариев дополнительно соединен с блоком настройки, блок приема сигналов с датчиков, блок приема и/или передачи информационных сигналов, блок принятия решений и блок управления исполнительными устройствами выполнены с возможностью подключения к непосредственно взаимодействующим со следящей системой устройствам, к которым относятся датчики, излучатель и приемник излучений, разъем, микрофон, динамик, дисплей, исполнительные устройства и отдельный источник питания.The technical result is also achieved by a tracking system for implementing a method for tracking objects and controlling their condition, comprising a memory unit, an internal clock, an actuator control unit, a sensor signal receiving unit, configured to be connected to a threshold sensor level unit, a conversion and comparison unit representing a set of converters-comparators, the number of which is equal to the number of sensors, and a processing unit, which is a set of subunits in time parameters, the number of which is equal to the number of comparator-converters, as well as with a sensor configurator connected to the node of threshold levels of sensors and the processing node, a block for receiving and / or transmitting information signals made with a voice communication node, as well as with a reception interface node and data transmission connected to the node processing the input commands and / or control data and the node forming the output messages, the block zoning and comparison of scenarios made with the node processing the input signals, data to the point zoning and comparing node for local scenarios, the node for circular zoning and comparing sequential scenarios, the node for polygon zoning and comparing parallel scenarios, each of which is additionally connected to the node for processing the results of zoning and comparing scenarios, a decision block made with the interconnected node event processing and a signal analysis unit, and a tuning unit made with a sensor tuning unit, a setting unit for a zoning unit and scenario comparison, units om the settings of the decision block and the tuning node of the block for receiving and / or transmitting information signals, each of which is connected to the node for setting the operating modes of the system, while the block for receiving and / or transmitting information signals is connected to the block of zoning and comparison of scenarios, memory block, block receiving signals from sensors, a decision block, an internal clock and a tuner, a memory block is additionally connected to a zoning and scenario comparison unit and a tuner, the internal clock is further connected with a block of zoning and comparison of scenarios, a block of decision-making, a block of receiving signals from sensors and a tuner, a block of receiving signals from the sensors is additionally connected to a block of zoning and comparison of scenarios and a tuner, a block of decision-making is additionally connected to a block of control actuators, a block of zoning and comparing the scenarios and the tuner, the zoning and script comparing unit is additionally connected to the tuner, a unit for receiving signals from sensors, a unit for receiving and / or transmitting information signals, the decision-making block and the control unit for executive devices are made with the possibility of connecting to devices directly interacting with the servo system, which include sensors, a radiator and a radiation receiver, a connector, a microphone, a speaker, a display, executive devices, and a separate power source.
Кроме того, для электроснабжения всех составных блоков и внутренних часов имеется внутренний источник питания.In addition, there is an internal power source for powering all component units and internal clocks.
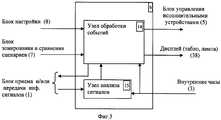
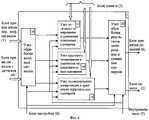
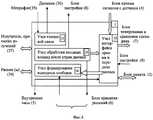
На фиг.1 представлена функциональная схема предложенной следящей системы, обеспечивающей реализацию предложенного способа слежения за объектами и управления их состоянием. На фиг.2-6 приведены функциональные схемы отдельных составных блоков системы, в частности блока настройки (фиг.2), блока принятия решений (фиг.3), блока зонирования и сравнения сценариев (фиг.4), блока приема и передачи сигналов (фиг.3) и блока приема сигналов с датчиков (фиг.6).Figure 1 presents the functional diagram of the proposed tracking system that provides the implementation of the proposed method for tracking objects and managing their condition. Figure 2-6 shows the functional diagrams of the individual components of the system, in particular the tuner (figure 2), the decision block (figure 3), the block zoning and comparison of scenarios (figure 4), the block of reception and transmission of signals ( figure 3) and the block receiving signals from sensors (figure 6).
Следящая система (фиг.1) содержит блок 1 приема и/или передачи информационных сигналов, блок 2 памяти, внутренние часы 3, блок 4 приема сигналов с датчиков, блок 5 управления исполнительными устройствами, блок 6 принятия решений, блок 7 зонирования (картографического) и сравнения сценариев и блок 8 настройки.The tracking system (Fig. 1) contains a
Блок 8 настройки (фиг.2) выполнен с узлом 9 настройки датчиков, узлом 10 настройки блока зонирования и сравнения сценариев, узлом 11 настройки блока принятия решений и узлом 12 настройки блока приема и/или передачи информационных сигналов, каждый из которых подключен к узлу 13 установки режимов работы системы.
Блок 6 принятия решений (фиг.3) выполнен с соединенными между собой узлом 14 обработки событий и узлом 15 анализа сигналов.Block 6 decision-making (figure 3) is made with
Блок 7 зонирования и сравнения сценариев (фиг.4) выполнен с узлом 16 обработки входных сигналов, подключенным к узлу 17 точечного зонирования и сравнения локальных сценариев, узлу 18 кругового зонирования и сравнения последовательных сценариев, узлу 19 полигонального зонирования и сравнения параллельных сценариев, каждый из которых дополнительно подключен к узлу 20 обработки результатов зонирования и сравнения сценариев.
Блок 1 приема и/или передачи информационных сигналов (фиг.5) выполнен с узлом 21 голосовой связи, а также с узлом 22 интерфейса приема и передачи данных, соединенным с узлом 23 обработки входных команд и/или управляющих данных и узлом 24 формирования выходных сообщений.
Блок 4 приема сигналов с датчиков (фиг.6) выполнен с узлом 25 пороговых уровней датчиков, узлом 26 преобразования и сравнения, конфигуратором 27 датчиков и узлом 28 обработки. Узел 25 пороговых уровней датчиков, узел 26 преобразования и сравнения и узел 28 обработки соединены последовательно. Конфигуратор 27 датчиков подключен к узлу 25 пороговых уровней датчиков и узлу 28 обработки. Узел 26 преобразования и сравнения представляет собой совокупность преобразователей-компараторов 29, количество которых равно количеству датчиков. Узел 28 обработки представляет собой совокупность субблоков 30 временных параметров, количество которых равно количеству преобразователей-компараторов 29.
В случае необходимости все составные блоки и внутренние часы следящей системы подключаются к внутреннему источнику 31 питания (показан на фиг.1).If necessary, all the component units and the internal clock of the tracking system are connected to the internal power supply 31 (shown in figure 1).
Блок 4 приема сигналов с датчиков, блок 1 приема и/или передачи информационных сигналов, блок 6 принятия решений и блок 5 управления исполнительными устройствами выполнены с возможностью подключения к непосредственно взаимодействующим со следящей системой устройствам, которыми могут быть датчики 32, излучатель и приемник излучений 37, разъем 39, микрофон 35, динамик 36, дисплей (или табло, или лампа) 38, исполнительные устройства 34 и отдельный источник питания (аккумуляторная батарея) 33.
В качестве внешнего источника команд и/или управляющих данных используются терминал и/или интерфейс оператора, установленный на компьютере, и/или модем, и/или микрофон, и/или телефон. При этом интерфейс оператора выполняется с картографической базой данных.As an external source of commands and / or control data, a terminal and / or an operator interface installed on a computer, and / or a modem, and / or a microphone, and / or a telephone are used. In this case, the operator interface is performed with the cartographic database.
В качестве внешнего приемника информации используются динамик, и/или дисплей, и/или табло, и/или лампа, и/или пульт контроля. При этом пульт контроля выполняется как терминал и/или интерфейс оператора, установленный на компьютере, и/или как модем, и/или как телефон.As an external information receiver, a speaker, and / or a display, and / or a board, and / or a lamp, and / or a control panel are used. In this case, the control panel is executed as a terminal and / or an operator interface installed on a computer, and / or as a modem, and / or as a telephone.
В процессе слежения за объектами и управления их состоянием проводят картирование поверхностей возможного расположения или перемещения объектов слежения, разбиение этих поверхностей на зоны посредством выбора оператором координат активных и/или пассивных зон в соответствии с совокупностью прогнозируемых в этих зонах простых и сложных событий.In the process of tracking objects and controlling their condition, they map surfaces of the possible location or movement of tracking objects, divide these surfaces into zones by selecting the coordinates of active and / or passive zones by the operator in accordance with the totality of simple and complex events predicted in these zones.
В качестве прогнозируемых простых событий рассматривают, как уже отмечалось, нахождение объекта, на котором установлена следящая система, в определенном состоянии в течение заданного интервала времени, расположение объекта слежения вне/внутри картографической зоны, пересечение объектом слежения границы активной картографической зоны с подтверждением факта пересечения несколько раз подряд, превышение порогового уровня величиной скорости движения объекта, на котором установлена следящая система, установление значения напряжения на выходе источника питания ниже порогового уровня, установление значения сигнала на выходе датчика выше или ниже порогового уровня, установление значения сигнала на выходе дублирующего датчика выше или ниже порогового уровня, нахождение исполнительного устройства в определенном состоянии, регистрацию факта перезапуска программы следящей системы, регистрацию факта сбоя в работе следящей системы. В качестве прогнозируемых сложных событий рассматривают одновременное (одномоментное) выполнение нескольких простых событий, детерминированную последовательность во времени простых событий, детерминированную последовательность во времени одновременных сложных событий, сочетание перечисленных видов сложных событий.As predicted simple events, consider, as already noted, the location of the object on which the tracking system is installed in a certain state for a given time interval, the location of the tracking object outside / inside the cartographic zone, the tracking object crossing the border of the active cartographic zone with confirmation of the fact of intersection once in a row, exceeding the threshold level with the speed of the object on which the tracking system is installed, setting the voltage value to the output of the power supply is below the threshold level, setting the signal value at the sensor output above or below the threshold level, setting the signal value at the output of the backup sensor above or below the threshold level, finding the actuator in a certain state, registering the fact of restarting the tracking system program, registering the fact of failure the work of the tracking system. As predicted complex events, simultaneous (simultaneous) execution of several simple events, a deterministic sequence in time of simple events, a deterministic sequence in time of simultaneous complex events, a combination of the listed types of complex events are considered.
Зоны формируют в виде совокупности кругов с переменными либо постоянными координатами их центров и/или в виде колец с переменными либо постоянными координатами их центров и переменными либо постоянными внутренними и внешними радиусами, и/или в виде многоугольников с произвольным числом сторон.Zones are formed as a set of circles with variables or constant coordinates of their centers and / or in the form of rings with variables or constant coordinates of their centers and variables or constant internal and external radii, and / or in the form of polygons with an arbitrary number of sides.
После этого каждому контролируемому объекту ставят в соответствие ту или иную зону, а оператором и/или следящей системой выбирают совокупность информативных признаков, характеризующих возможное событие для каждого из объектов слежения. В ходе настройки устанавливают минимальное значение последовательных подтверждений пересечения объектом внешних границ зон, выполненных в виде колец и/или многоугольников, и производят установление для каждого объекта эталонных моделей сценариев их возможных перемещений или состояний. Минимальное значение последовательных подтверждений пересечения объектом внешних границ зон устанавливают не менее трех за фиксированный или нефиксированный промежуток времени.After that, each zone is assigned a zone, and the operator and / or tracking system select a set of informative features that characterize a possible event for each of the tracking objects. During the setup, the minimum value of successive confirmations of the intersection of the object’s intersection of the outer boundaries of the zones, made in the form of rings and / or polygons, is established and reference models of scenarios of their possible movements or states are established for each object. The minimum value of successive confirmations of an object crossing the outer borders of zones is set to at least three for a fixed or non-fixed period of time.
При слежения за объектом регистрируют сигналы с датчиков и временные параметры для установленного режима функционирования следящей системы и обрабатывают их трактами следящей системы.When tracking an object, signals from sensors and time parameters for the established operating mode of the tracking system are recorded and processed by the paths of the tracking system.
Путем оперативной многопараметрической настройки проводят многоуровневую и соответствующую текущему состоянию объекта адаптацию следящей системы. Многоуровневую адаптацию следящей системы проводят автономно средствами следящей системы или внешними источниками команд и/или управляющих данных.By operational multi-parameter adjustment, a multi-level adaptation of the tracking system is carried out that is appropriate to the current state of the object. Multilevel adaptation of the tracking system is carried out autonomously by means of a tracking system or external sources of commands and / or control data.
Далее формируют управляющие команды и проводят передачу и/или прием информационных сигналов. Передачу и/или прием информационных сигналов через канал связи между источником команд и/или управляющих данных и следящей системой, а также между следящей системой и пультом контроля осуществляют посредством излучателя и/или приемника излучений и/или посредством проводной линии связи.Next, form control commands and carry out the transmission and / or reception of information signals. The transmission and / or reception of information signals through the communication channel between the source of commands and / or control data and the servo system, as well as between the servo system and the control panel, is carried out by means of a radiator and / or radiation receiver and / or via a wired communication line.
После этого сравнивают сценарии зарегистрированных перемещений и состояний объектов с базовыми сценариями, а при наличии зон картированных поверхностей в виде колец и многоугольников сравнивают также количество зарегистрированных последовательных подтверждений пересечений объектом границ зон с их установленным минимальным значением. На основании результатов сравнения принимают итоговое решение о посылке сообщения о пересечении объектом слежения зонных границ и/или изменении базового сценария перемещения объекта или его состояния внешним приемникам информации, и/или об изменении настройки следящей системы, и/или о посылке управляющих сообщений на объект слежения, блокирующих режим его функционирования.After that, the scenarios of registered movements and states of objects are compared with the basic scenarios, and in the presence of zones of mapped surfaces in the form of rings and polygons, the number of recorded consecutive confirmations of intersections of zone boundaries with their set minimum value is also compared. Based on the results of the comparison, the final decision is made on sending a message about the object crossing the zone boundaries and / or changing the basic scenario for moving the object or its state to external information receivers, and / or about changing the settings of the tracking system, and / or sending control messages to the tracking object blocking the mode of its functioning.
По результатам слежения и при развитии ситуации по непрограммируемому сценарию (например, когда количество зарегистрированных последовательных подтверждений пересечений объектом границ зон превышает установленное) принимаются оперативные или технические меры, исключающие дальнейшее развитие непрограммируемого сценария.Based on the results of monitoring and when the situation develops according to an unprogrammable scenario (for example, when the number of recorded consecutive confirmations of intersections by an object of zone boundaries exceeds the established one), operational or technical measures are taken to exclude further development of the unprogrammed scenario.
Следящая система реализует выполнение зонирования и сравнения сценариев перемещений и состояния объекта. При реализации следящей системой алгоритмов картографического зонирования блок 7 зонирования и сравнения сценариев производит прием и обработку текущих координат расположения объекта слежения, проверку попадания текущих координат объекта в каждую из активных для этой следящей системы (для конкретного объекта) зон, накопление обнаруженных пересечений границ активных зон объектом в течение нескольких периодов съема его текущих координат, после чего формирует сообщение об уверенном пересечении объектом слежения границ активных зон. При осуществлении следящей системой сравнения сценариев изменения состояния объекта слежения блок 7 зонирования и сравнения сценариев принимает информацию с блока 4 приема сигналов с датчиков, сравнивает реальный сценарий изменения состояния объекта, на котором установлена следящая система, с активными шаблонами сценариев, обрабатывает совокупность характеристик, соответствующих зарегистрированным реальным сценариям. При одновременной реализации следящей системой зонирования и сравнения сценариев блок 7 осуществляет прием и обработку текущих координат расположения объекта, проверку попадания текущих координат объекта слежения в каждую из активных для этой следящей системы (для конкретного объекта) зон, накопление обнаруженных пересечений границ активных зон объектом в течение нескольких периодов съема его текущих координат, после чего формирует сообщение об уверенном пересечении объектом слежения границ активных зон, а также принимает информацию с блока 4 приема сигналов с датчиков, сравнивает реальный сценарий изменения состояния объекта, на котором установлена следящая система, с активными шаблонами сценариев, обрабатывает совокупность характеристик, соответствующих зарегистрированным реальным сценариям. Базовые (эталонные) траектории, базовые (эталонные) сценарии, параметры зон и пороговые уровни датчиков 32 задаются внутренними установками следящей системы или внешними управляющими посылками.The tracking system implements zoning and comparing movement scenarios and object state. When the tracking system implements cartographic zoning algorithms, the zoning and
В процессе функционирования следящей системы напряжения с выходов датчиков 32 подаются на блок 4 приема сигналов с датчиков. В его узле 26 производится, при необходимости, аналого-цифровое преобразование и сравнение с пороговыми уровнями, а затем в узле 28 - необходимая обработка сигналов, поступающих с датчиков 32. Значения аргументов функций обработки значений показаний датчиков 32 в блоке 4 можно изменять.In the process of functioning of the tracking system, the voltages from the outputs of the sensors 32 are supplied to the
Получая данные от блока 1 приема и/или передачи информационных сигналов, блок 7 зонирования и сравнения сценариев обменивается данными с блоком 2 памяти для записи, изменения или удаления параметров зон и параметров сценариев. В ответ на специальные команды от источника команд и/или управляющих данных следящая система обеспечивает считывание уже установленных параметров.Receiving data from
С приемника 37 излучений или с разъема (разъемов) 39 на блок 1 приема и/или передачи информационных сигналов приходят посылки команд и/или управляющих данных в одном из определенных форматов. Излучатель (излучатели) и приемник 37 излучений и/или разъем (разъемы) 39 внешнего подключения следящей системы используются для работы следящей системы в различных режимах, в том числе для пуско-наладочных, ремонтных работ и диагностики. Блок 1 создает кодовые посылки данных для передачи их через излучатель (излучатели) 37 или разъем (разъемы) 39 внешнему приемнику (приемникам) информации. В блоке 1 приема и/или передачи информационных сигналов определяется формат посылок данных и команд, а также протокол обмена информацией. Разновидность формата посылок и протокола обмена данными может определяться внутренними установками следящей системы или внешними управляющими посылками. Блок 1 приема и/или передачи информационных сигналов обнаруживает команды, предназначенные для исполнительных устройств 34 объекта слежения, и передает эти команды блоку 5 управления исполнительными устройствами. Также блок 1 обнаруживает команды, предназначенные для блока 4 приема сигналов с датчиков, и передает ему эти команды. Узел 21 голосовой связи подключен к излучателю и приемнику излучений 37, разъему 39, микрофону 35 и динамику 36.From the receiver 37 of emissions or from the connector (s) 39 to the
Блок 6 принятия решений принимает сигналы с блока 7 зонирования и сравнения сценариев, а также с блока 1 приема и/или передачи информационных сигналов, и в соответствии с заданной конфигурацией работы следящей системы передает сигналы на блок 5 управления исполнительными устройствами и на дисплей 38. Также блок 6 формирует информацию, в соответствии с которой следящая система передает сообщения на пульт (пульты) контроля.Block 6 decision making receives signals from
Узел 13 установки режимов работы следящей системы в блоке 8 настройки получает от блока 1 приема и/или передачи информационных сигналов команду о переводе следящей системы в заданный режим работы, к которым относятся «Режим настройки по умолчанию», «Режим энергосбережения», «Режим удаленной настройки», «Режим навигации», «Режим стационарного объекта» и т.д. Также, получая данные от блока 1 приема и/или передачи информационных сигналов на узлы 9, 10, 11 и 12, блок 8 настройки записывает, изменяет или удаляет параметры настройки, параметры зон и параметры сценариев. Блок 8 настройки передает параметры настройки, параметры зон и сценариев на блок 4 приема сигналов с датчиков, блок 7 зонирования и сравнения сценариев, блок 6 принятия решений, блок 1 приема и/или передачи информационных сигналов (а именно, с узла 9 - на блок 4 приема сигналов с датчиков, с узла 10 - на блок 7 зонирования и сравнения сценариев, с узла 11 - на блок 6 принятия решений, с узла 12 - на блок 1 приема и/или передачи информационных сигналов).The
Также, получая данные от блока 1 приема и передачи информационных сигналов, поступающие на узлы 9, 10, 11, 12, блок 8 настройки считывает через блок 2 с памяти следящей системы параметры настройки, необходимые параметры зон и параметры сценариев. Блок 8 настройки в ответ на специальные команды обеспечивает считывание уже существующих в нем установок. Настройка, как уже отмечалось, осуществляется внутренними установками следящей системы автономно или внешними управляющими посылками, при этом реализуются следующие виды настройки:Also, receiving data from the
- настройка режима работы всей следящей системы;- setting the operating mode of the entire tracking system;
- настройка блока 4 приема сигналов, поступающих с датчиков 32;- setting
- настройка блока 7 зонирования и сравнения сценариев;- setting
- настройка блока 1 приема и/или передачи информационных сигналов.- setting
Блок 2 памяти обрабатывает, записывает во внутреннюю память следящей системы, считывает или удаляет с нее данные как характеризующие работу объекта, на котором установлена следящая система, так и данные, необходимые для осуществления зонирования и сравнения сценариев. Внутренние часы 3 подстраиваются внешними управляющими сигналами и передают значение даты и времени на узел 22 интерфейса приема и передачи данных блока 1 приема и передачи информационных сигналов. Для периодической подстройки внутренних часов 3 внешними сигналами формируются сигналы, передаваемые по линии соединения внутренних часов 3 и блока 1 приема и/или передачи информационных сигналов. Блок 4 приема сигналов с датчиков передает на узел 22 интерфейса приема и передачи данных значения показаний датчиков 32, установленных на объекте слежения. В результате синтеза данных, поступивших с приемника 37 излучений, блока 4 приема сигналов с датчиков, внутренних часов 3, узла 22 интерфейса приема и передачи данных, формируются информационные потоки, которые блок 2 памяти обрабатывает, записывает в память следящей системы и считывает с нее или передает через излучатель 37 или разъем 39.The memory unit 2 processes, writes to the internal memory of the servo system, reads or deletes data from it both characterizing the operation of the object on which the servo system is installed, and the data necessary for zoning and comparison of scenarios. The internal clock 3 is adjusted by external control signals and transmit the value of the date and time to the node 22 of the interface for receiving and transmitting data of the
На блок 7 зонирования и сравнения сценариев с узла 22 интерфейса приема и передачи данных передается сформированная заданным образом информация, принятая с входов приемника 37 излучений или разъема 39. Также с блока 6 принятия решений на узел 24 формирования выходных сообщений подаются сигналы, управляющие передачей коротких сообщений внешним приемникам. Блок 7 зонирования и сравнения сценариев, получая данные от блока 1 приема и/или передачи информационных сигналов и от блока 4 приема сигналов с датчиков, осуществляет процессы зонирования и сравнения сценариев в соответствии с сигналами настройки, поступающими от блока 8 настройки. Блок 7 зонирования и сравнения сценариев получает значения параметров активных картографических зон и активных сценариев состояния объекта с блока 2 памяти, при этом следящая система обеспечивает считывание уже установленных параметров зон и сценариев в ответ на специальные команды источника команд.The information generated in a predetermined manner received from the inputs of the radiation receiver 37 or
Блок 6 принятия решений принимает сигналы с блока 7 зонирования и сравнения сценариев, а также с блока 1 приема и/или передачи информационных сигналов, в соответствии с которыми передаются сигналы на блок 5 управления исполнительными устройствами и на дисплей 38. Также блок 6 принятия решений формирует информацию, в соответствии с которой следящая система передает сообщения на внешние приемники (например, пульт контроля). В узле 14 обработки событий производится обработка результатов зонирования и сравнения сценариев, причем значения аргументов функций обработки поступают с блока 8 настройки. Результаты этой обработки в соответствии с требованиями выбранной настройки могут выводиться на экран дисплея 38.Block 6 decision making receives signals from
Источник команд и/или управляющих данных может быть исключен из системы, а пульт контроля преобразован в приемник редких коротких сообщений, что обеспечивается повышением уровня интеллектуальных возможностей следящей системы.The source of commands and / or control data can be excluded from the system, and the control panel is converted into a receiver of rare short messages, which is provided by increasing the level of intellectual capabilities of the tracking system.
Использование настоящей группы изобретений позволяет:Using this group of inventions allows you to:
- оперативно и автономно управлять состоянием объекта, на котором установлена следящая система (без ожидания информации от внешнего источника команд и управляющих данных), в частности сравнивать реальный маршрут движения объекта и/или его состояние с заданными маршрутом и/или его состоянием и оперативно сообщать об отклонениях;- promptly and autonomously manage the state of the object on which the tracking system is installed (without waiting for information from an external source of commands and control data), in particular, compare the real route of movement of the object and / or its state with the given route and / or its state and promptly report deviations;
- обрабатывать информацию, соответствующую событиям различного уровня сложности, при этом на основе априорной информации оказывается возможным задание списка активных событий, требующих обработки и анализа, и следствием этого (в случаях обработки только простейших событий) является экономия собственных энергоинформационных ресурсов следящей системы, установленной на объекте;- process information corresponding to events of various difficulty levels, while on the basis of a priori information it is possible to set a list of active events that require processing and analysis, and the consequence (in cases of processing only the simplest events) is to save own energy information resources of the tracking system installed on the object ;
- проводить многоуровневую и соответствующую текущему состоянию объекта адаптацию следящей системы, в том числе автономно;- carry out multi-level and appropriate to the current state of the object adaptation of the tracking system, including autonomously;
- снизить объем передаваемых по каналам связи данных в зависимости от выбранных пользователем настроек и оптимально подобранного режима работы следящей системы при сохранении высокого уровня достоверности передаваемых данных и уменьшении затрат на трафик обмена.- reduce the amount of data transmitted through communication channels depending on the settings selected by the user and the optimally selected operating mode of the tracking system while maintaining a high level of reliability of the transmitted data and reducing the cost of exchange traffic.
Claims (15)
Translated fromRussianPriority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2006127941/11ARU2297673C1 (en) | 2006-08-02 | 2006-08-02 | Method for tracking objects and controlling their condition and system for realization of said method |
| PCT/EP2007/006764WO2008014975A2 (en) | 2006-08-02 | 2007-07-31 | Method for tracking and status control of objects and tracking system for carrying out said method |
| EP07786461AEP2087476A1 (en) | 2006-08-02 | 2007-07-31 | Method for tracking and status control of objects and tracking system for carrying out said method |
| DE200720019376DE202007019376U1 (en) | 2006-08-02 | 2007-07-31 | tracking system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2006127941/11ARU2297673C1 (en) | 2006-08-02 | 2006-08-02 | Method for tracking objects and controlling their condition and system for realization of said method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU2297673C1true RU2297673C1 (en) | 2007-04-20 |
Family
ID=38036956
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2006127941/11ARU2297673C1 (en) | 2006-08-02 | 2006-08-02 | Method for tracking objects and controlling their condition and system for realization of said method |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP2087476A1 (en) |
| DE (1) | DE202007019376U1 (en) |
| RU (1) | RU2297673C1 (en) |
| WO (1) | WO2008014975A2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2442220C1 (en)* | 2010-11-01 | 2012-02-10 | Открытое акционерное общество "Татнефть" им. В.Д. Шашина | The control system of vehicles and personnel movements |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1993004453A1 (en)* | 1991-08-16 | 1993-03-04 | Pinpoint Communications, Inc. | Communication system and method for determining the location of a transponder unit |
| RU2126174C1 (en)* | 1997-10-22 | 1999-02-10 | Саломатин Андрей Аркадьевич | Method determining coordinates of mobile object, method of identification of subscribers and fixing their positions, radio communication system of subscribers with central station with identification of subscribers and fixing their positions |
| JP2004013801A (en)* | 2002-06-11 | 2004-01-15 | Hitachi Electronics Service Co Ltd | Automatic reporting management system on arriving at destination and passage point |
| RU2246764C2 (en)* | 2003-01-20 | 2005-02-20 | Ежов Владимир Александрович | Method for tracking movement of objects and system for realization of said method |
| RU2273055C1 (en)* | 2005-01-25 | 2006-03-27 | Николай Николаевич Старченков | Method for operative escorting and controlling of mobile objects |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU28786U1 (en) | 2002-10-25 | 2003-04-10 | ЗАО "Рэйс Коммуникейшн" | Multi-user distributed monitoring system for moving objects |
| RU2279139C2 (en) | 2004-09-30 | 2006-06-27 | Общество с ограниченной ответственностью "Мобильная Реклама" | System for monitoring moveable advertising objects |
- 2006
- 2006-08-02RURU2006127941/11Apatent/RU2297673C1/ennot_activeIP Right Cessation
- 2007
- 2007-07-31DEDE200720019376patent/DE202007019376U1/ennot_activeExpired - Lifetime
- 2007-07-31EPEP07786461Apatent/EP2087476A1/ennot_activeCeased
- 2007-07-31WOPCT/EP2007/006764patent/WO2008014975A2/enactiveApplication Filing
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO1993004453A1 (en)* | 1991-08-16 | 1993-03-04 | Pinpoint Communications, Inc. | Communication system and method for determining the location of a transponder unit |
| RU2126174C1 (en)* | 1997-10-22 | 1999-02-10 | Саломатин Андрей Аркадьевич | Method determining coordinates of mobile object, method of identification of subscribers and fixing their positions, radio communication system of subscribers with central station with identification of subscribers and fixing their positions |
| JP2004013801A (en)* | 2002-06-11 | 2004-01-15 | Hitachi Electronics Service Co Ltd | Automatic reporting management system on arriving at destination and passage point |
| RU2246764C2 (en)* | 2003-01-20 | 2005-02-20 | Ежов Владимир Александрович | Method for tracking movement of objects and system for realization of said method |
| RU2273055C1 (en)* | 2005-01-25 | 2006-03-27 | Николай Николаевич Старченков | Method for operative escorting and controlling of mobile objects |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2442220C1 (en)* | 2010-11-01 | 2012-02-10 | Открытое акционерное общество "Татнефть" им. В.Д. Шашина | The control system of vehicles and personnel movements |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2008014975A2 (en) | 2008-02-07 |
| DE202007019376U1 (en) | 2012-02-15 |
| EP2087476A1 (en) | 2009-08-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US12229598B2 (en) | Task execution system for autonomous robot | |
| US7406401B2 (en) | Sensor manager device, computer program for controlling sensor manager device, computer-readable storage medium containing computer program, and method controlling sensor manager device | |
| US7363137B2 (en) | Construction equipment discovery on a network | |
| CN103312772A (en) | Data acquisition system applied to internet of things and corresponding device | |
| US9389600B2 (en) | Central control system and method for setting control point thereof | |
| Wang et al. | Fundamental technology for RFID-based supervisory control of shop floor production system | |
| US20180157975A1 (en) | Method, system and computer program for forecasting signaling in a light signal system | |
| WO2023103598A1 (en) | Base station activation method and apparatus, electronic device, and computer-readable storage medium | |
| KR101596800B1 (en) | Centralized Control System and Controlling Method for Sun Tracking | |
| KR20190140529A (en) | Smart Factory Energy Saving System Using IoT Platform | |
| JP7136277B2 (en) | Scheduling system, scheduling method and program | |
| CN114793239A (en) | A system and method for realizing the function of an inland intelligent ship domain controller | |
| US20100026514A1 (en) | System and method for providing self-locating wireless sensors | |
| Pargaien et al. | Smart waste collection monitoring system using IoT | |
| KR20220076234A (en) | SMART FACTORY MANAGEMET SYSTEM USING IoT GATEWAY BASED ON EDGE COMPUTING | |
| RU2297673C1 (en) | Method for tracking objects and controlling their condition and system for realization of said method | |
| CN114815844A (en) | Control method, device, server, medium and equipment for intelligent robot | |
| KR102415461B1 (en) | Ai camera and monitering system able to detect situation and give an alarm | |
| CN106408239A (en) | Express delivery service information monitoring method, system, client and server | |
| KR102434201B1 (en) | CONNECTIVITY MANAGEMENT APPARATUS AND METHOD FOR INTERFERENCE RELAXATION BETWEEN HETEROGENEOUS WIRELESS DEVICES OF EDGE GATEWAY UNDER IoT SENSOR ENVIRONMENT | |
| Flanigan et al. | Optimal event-based policy for remote parameter estimation in wireless sensing architectures under resource constraints | |
| JP2005100443A (en) | Sensor management device, control program of sensor management device, computer-readable recording medium recorded with this program, and control method of sensor management device | |
| CN112200995A (en) | Low-power consumption field security system based on hybrid architecture | |
| Bolla et al. | Pioneering Transportation with Next-Gen Safety and Tracking Innovations | |
| RU2319215C1 (en) | Position control servomechanism |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PC41 | Official registration of the transfer of exclusive right | Effective date:20111212 | |
| PC41 | Official registration of the transfer of exclusive right | Effective date:20130506 | |
| MM4A | The patent is invalid due to non-payment of fees | Effective date:20180803 |