RU2250066C1 - Office or domestic arm-chair with device for stretching arms in sitting posture - Google Patents
Office or domestic arm-chair with device for stretching arms in sitting postureDownload PDFInfo
- Publication number
- RU2250066C1 RU2250066C1RU2004119867/12ARU2004119867ARU2250066C1RU 2250066 C1RU2250066 C1RU 2250066C1RU 2004119867/12 ARU2004119867/12 ARU 2004119867/12ARU 2004119867 ARU2004119867 ARU 2004119867ARU 2250066 C1RU2250066 C1RU 2250066C1
- Authority
- RU
- Russia
- Prior art keywords
- lever
- piston
- pneumatic
- chair
- loader
- Prior art date
Links
Images





Classifications
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/00178—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices for active exercising, the apparatus being also usable for passive exercising
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47C—CHAIRS; SOFAS; BEDS
- A47C9/00—Stools for specified purposes
- A47C9/002—Stools for specified purposes with exercising means or having special therapeutic or ergonomic effects
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B23/00—Exercising apparatus specially adapted for particular parts of the body
- A63B2023/006—Exercising apparatus specially adapted for particular parts of the body for stretching exercises
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/008—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices using hydraulic or pneumatic force-resisters
- A63B21/0085—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices using hydraulic or pneumatic force-resisters using pneumatic force-resisters
- A63B21/0087—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices using hydraulic or pneumatic force-resisters using pneumatic force-resisters of the piston-cylinder type
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2208/00—Characteristics or parameters related to the user or player
- A63B2208/02—Characteristics or parameters related to the user or player posture
- A63B2208/0228—Sitting on the buttocks
- A63B2208/0233—Sitting on the buttocks in 90/90 position, like on a chair
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2210/00—Space saving
- A63B2210/02—Space saving incorporated in chairs
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Biophysics (AREA)
- Orthopedic Medicine & Surgery (AREA)
- General Health & Medical Sciences (AREA)
- Physical Education & Sports Medicine (AREA)
- Rehabilitation Tools (AREA)
- Special Chairs (AREA)
Abstract
Description
Translated fromRussianИзобретение относится к предметам мебели и может быть использовано при разработке домашних или офисных кресел, обеспечивающих повышенный комфорт пользователю кресла, в частности позволяющих уменьшить последствия гиподинамии при длительном нахождении в кресле. Изобретение может быть также использовано на транспортных средствах, например в поездах дальнего следования, самолетах, автобусах, а также в транспортных средствах личного пользования, владельцы которых хотят иметь повышенный комфорт при дальних поездках.The invention relates to furniture and can be used in the development of home or office chairs that provide increased comfort to the user of the chair, in particular, to reduce the effects of physical inactivity for a long time in the chair. The invention can also be used on vehicles, for example, in long-distance trains, airplanes, buses, as well as in personal vehicles, the owners of which want to have increased comfort on long trips.
Появление новых технологий, связанных с компьютерами и телевизорами, существенно изменило условия работы и отдыха большинства населения Земли, и, в отличие от некомпьютеризированного общества, для современного человека необходимо создавать условия для комфортного выполнения физических упражнений непосредственно на рабочем месте или дома, в основном в положении сидя на кресле с встроенной в него системой выполнения физических упражнений. Кресло должно обеспечивать эксплуатацию его, как в нормальном режиме, так и при выполнении физических упражнений с регулированием прилагаемого усилия в соответствии с требованиями пользователя и с исключением травмирования пользователя при прекращении физической разминки.The emergence of new technologies related to computers and televisions has significantly changed the working and leisure conditions of the majority of the world's population, and, unlike a non-computerized society, it is necessary for a modern person to create conditions for the comfortable performance of physical exercises directly at the workplace or at home, mainly in the position sitting on a chair with a built-in system for performing physical exercises. The chair should ensure its operation, both in normal mode and when performing physical exercises with the regulation of the applied force in accordance with the requirements of the user and with the exception of injury to the user when the physical warm-up is terminated.
Известно устройство для физической разминки рук, используемое совместно с любым домашним или офисным стулом (креслом), содержащее присоединяемый к стулу спереди корпус, оснащенный средством для физической разминки рук, которое включает в себя два качающихся рычага, присоединенных к общему фрикционному нагружателю (см. патент США №5308302, НКИ 482/60, 03.05.1994). Выполнение устройства в виде автономного блока неудобно для пользователя. Кроме того, используемая конструкция средства для физической разминки рук имеет ограниченные возможности по выполняемым движениям и физической нагрузке.A device for physical warming up of hands is known, used in conjunction with any home or office chair (armchair), comprising a body attached to the chair in front, equipped with means for physical warming up of hands, which includes two swinging levers attached to a common friction load (see patent USA No. 5308302, NKI 482/60, 05/03/1994). The implementation of the device in the form of a standalone unit is inconvenient for the user. In addition, the used design of means for physical warm-up of the hands has limited capabilities for performed movements and physical activity.
Известно также офисное или домашнее кресло, содержащее основание, сиденье, спинку, полые подлокотники и встроенные в кресло два средства для физической разминки рук, установленные справа и слева от сиденья кресла, каждое из которых включает в себя поршневой нагружатель с гидравлическим цилиндром и кинематически связанный с поршневым нагружателем качающийся силовой рычаг с закрепленным на его конце захватом. Для регулирования усилия на качающемся силовом рычаге используется перемещающаяся вдоль силового рычага втулка (см. патент США №5470298, НКИ 482/130, 28.11.1995). Занимаясь физическими упражнениями, в данном кресле можно выполнять только одно движение. Используемое в составе кресла средство для физической разминки рук требует специализированной конструкции основания кресла.An office or home chair is also known, comprising a base, a seat, a backrest, hollow armrests and two means for physical warming up of hands built into the chair, installed to the right and left of the chair seat, each of which includes a piston loader with a hydraulic cylinder and kinematically connected with with a piston loader, a swinging power lever with a grip fixed at its end. To control the force on the swinging power arm, a sleeve moving along the power arm is used (see US Patent No. 5470298, NKI 482/130, 11/28/1995). Being engaged in physical exercises, only one movement can be performed in this chair. The means used for the physical warm-up of the hands used in the composition of the chair require a specialized design of the base of the chair.
Наиболее близким к предлагаемому изобретению по совокупности существенных признаков является кресло, содержащее основание, сиденье, спинку, подлокотники, встроенные в кресло два многофункциональных средства физической разминки рук, размещенные с двух сторон относительно сиденья, каждое из которых имеет устройство для создания линейного усилия, включающее в себя рукоятку, закрепленную на конце перемещающегося штока, и устройство для создания качающего усилия, включающее в себя кинематически связанный с поршневым пневматическим нагружателем качающийся силовой рычаг с закрепленным на его конце захватом, и системы регулирования усилия на рукоятках и захватах (см. патент США №5755650, НКИ 482/138, 26.05.1998). В системе регулирования усилия на захватах качающегося рычага используется механическое изменение длины качающегося рычага, что допускает только ступенчатое изменение усилия. Силовой рычаг может качаться только в одной плоскости (перпендикулярно боковой кромке сидения), что ограничивает возможности физической разминки рук одним типом движения. Отдельное выполнение средств для создания качающегося и линейных усилий усложняет монтаж их на кресле. Все средства для создания физических усилий постоянно находятся в рабочем положении, что приводит к изменению привычной конфигурации кресла, а выступание захватов над подлокотниками ограничивает движение рук пользователя при выполнении рутинной работы.Closest to the proposed invention in terms of essential features is a chair containing a base, seat, backrest, armrests, two multifunctional means of physical warming up of hands built into the chair, placed on both sides of the seat, each of which has a device for creating linear force, including a handle mounted on the end of the moving rod, and a device for creating a pumping force, including kinematically connected with a piston pneumatic load the recipient is a swinging power lever with a grip fixed at its end, and a force control system on the handles and grips (see US Patent No. 5755650, NKI 482/138, 05/26/1998). In the force control system on the arms of the swing arm, a mechanical change in the length of the swing arm is used, which allows only a stepwise change in force. The power lever can swing only in one plane (perpendicular to the side edge of the seat), which limits the possibility of physical warm-up of the hands by one type of movement. Separate execution of means for creating a swinging and linear efforts complicates their installation on the chair. All means for creating physical effort are constantly in the working position, which leads to a change in the usual configuration of the chair, and the protrusion of the grips over the armrests limits the movement of the user's hands when performing routine work.
Известно большое количество средств для физической разминки, в том числе для физической разминки рук, в которых для создания усилия используется сжатие воздуха в поршневых цилиндрах. В качестве прототипа принято средство для физической разминки рук, в положении сидя, содержащее поршневой пневматический нагружатель с пневматическим поршневым цилиндром, качающийся силовой рычаг с опорой для руки и кинематическую передачу, связывающую качающийся силовой рычаг со штоком поршневого цилиндра. Кинематическая передача включает в себя механически изменяемый по длине стержень и шарнирное соединение стержня со штоком (см. патент США №5755650, НКИ 482/138, 26.05.1998). Основное преимущество пневматических нагружателей связано с широким диапазоном регулирования нагрузки и отсутствием каких-либо утечек. Недостатком известных пневматических нагружателей является то, что они обеспечивают только одностороннее нагружение при рабочем ходе поршня (сжатие воздуха). При обратном движении необходимо удерживать качающийся силовой рычаг, и при случайном отпускании рычага пользователь рискует получить травму. Кроме того, все известные средства для физической разминки рук с пневматическими нагружателями обеспечивают только один вид нагрузки, и для выполнения двух видов нагрузки требуется дополнительное устройство.A large number of means are known for physical warming up, including for physical warming up of hands, in which air compression in piston cylinders is used to create force. As a prototype, a means for physically warming up the hands, in a sitting position, containing a piston pneumatic loader with a pneumatic piston cylinder, a swinging power lever with a support for the hand, and a kinematic transmission connecting the swinging power lever with the piston cylinder rod, was adopted. The kinematic transmission includes a rod mechanically variable in length and a swivel joint of the rod with the rod (see US Patent No. 5755650, NKI 482/138, 05.26.1998). The main advantage of pneumatic loaders is associated with a wide range of load control and the absence of any leaks. A disadvantage of the known pneumatic loaders is that they provide only one-sided loading during the stroke of the piston (air compression). During the reverse movement, it is necessary to hold the swinging power lever, and if the lever is accidentally released, the user risks injury. In addition, all known means for physical warm-up of hands with pneumatic loaders provide only one type of load, and an additional device is required to perform two types of load.
Задачей, на решение которой направлено предложенное изобретение, является создание кресла и средства для физической разминки рук, обеспечивающих повышенный комфорт пользователю за счет возможности выполнения физических упражнений, которые дают возможность пользователю, сидя в кресле, выполнять широкую гамму движений руками и не создают помех при использовании кресла в обычном режиме (выполнение каких-либо рутинных работ). Другой задачей изобретения является создание кресла и средства для физической разминки рук, при эксплуатации которых обеспечивается уменьшенная вероятность травмирования пользователя. Дополнительной задачей изобретения является создание кресла, в котором в максимальной степени можно использовать отработанные конструктивные схемы современных офисных и домашних кресел. Еще одной задачей изобретения является создание кресла, при эксплуатации которого пользователь сам может выбрать наиболее приемлемый режим работы кресла. Дополнительной задачей изобретения является создание кресла, оснащенного встроенными средствами для физической разминки рук, внешний вид которого не будет существенно отличаться от привычных форм домашних, офисных или других рабочих и пассажирских кресел. Еще одной задачей изобретения является создание кресла, в котором при выполнении физических упражнений усилия, прилагаемые пользователем, остаются практически неизменными и регулируются непосредственно самим пользователем. Дополнительной задачей изобретения является разработка средства для физической разминки рук с максимальной степенью технологической готовности его для установки на домашнем или офисном кресле.The problem to which the invention is directed is the creation of a chair and means for physical warming up of the hands, providing increased comfort to the user due to the ability to perform physical exercises that enable the user, sitting in the chair, to perform a wide range of hand movements and do not interfere with use chairs in normal mode (performing any routine work). Another object of the invention is to provide a chair and means for physically warming up the hands, the operation of which provides a reduced likelihood of injury to the user. An additional object of the invention is the creation of a chair in which to the maximum extent it is possible to use the developed structural schemes of modern office and home chairs. Another objective of the invention is the creation of a chair during operation of which the user himself can choose the most acceptable mode of operation of the chair. An additional object of the invention is the creation of a chair equipped with built-in means for physical warm-up of hands, the appearance of which will not differ significantly from the usual forms of home, office or other working and passenger seats. Another objective of the invention is the creation of a chair in which, when performing physical exercises, the efforts exerted by the user remain virtually unchanged and are regulated directly by the user. An additional objective of the invention is the development of means for physical warm-up of hands with a maximum degree of technological readiness for installation on a home or office chair.
Поставленные технические задачи решаются тем, что в офисном или домашнем кресле, содержащем основание, сиденье, спинку, подлокотники, встроенные в кресло два многофункциональных средства физической разминки рук, размещенные с двух сторон относительно сиденья, каждое из которых имеет устройство для создания линейного усилия, включающее в себя рукоятку, закрепленную на конце перемещающегося штока, и устройство для создания качающего усилия, включающее в себя кинематически связанный с поршневым пневматическим нагружателем качающийся силовой рычаг с закрепленным на его конце захватом, и систему регулирования усилия на захватах, согласно изобретению подлокотники кресла выполнены полыми, а каждое средство для физической разминки рук выполнено в виде автономного модуля, установленного в подлокотнике и оснащенного передним и задним узлами крепления его к креслу, каждый из которых выполнен с двумя степенями свободы, обеспечивающими возможность поворота автономного модуля относительно двух взаимно перпендикулярных осей с фиксацией его в нейтральном и рабочем положениях.The stated technical problems are solved in that in an office or home chair containing a base, seat, backrest, armrests, two multifunctional means of physical warming up of hands built into the chair, placed on both sides of the seat, each of which has a device for creating linear force, including a handle mounted on the end of the moving rod, and a device for creating a swinging force, including a swinging kinematically connected with a piston pneumatic loader a new lever with a grip fixed at its end, and a system for adjusting the force on the grips, according to the invention, the armrests of the chair are hollow, and each means for physical warming up of the hands is made in the form of an autonomous module installed in the armrest and equipped with front and rear attachment points of it to the chair each of which is made with two degrees of freedom, providing the ability to rotate the autonomous module relative to two mutually perpendicular axes with fixing it in neutral and working positions.
При этом каждый автономный модуль включает в себя несущий корпус, внутри которого размещен поршневой пневматический нагружатель, а с внешней стороны шарнирно закреплен полый качающийся силовой рычаг, устройство для создания линейного усилия выполнено в виде размещенного внутри полого качающегося силового рычага поршневого гидравлического нагружателя, шток которого выступает над торцом качающегося силового рычага, при этом захват установлен с возможностью поворота относительно качающегося силового рычага с перестановкой из рабочего в нейтральное положение и фиксацией его в указанных положениях.At the same time, each autonomous module includes a supporting body, inside of which a piston pneumatic loader is placed, and a hollow oscillating power lever is pivotally fixed on the outside, the device for creating linear force is made in the form of a piston hydraulic loader placed inside a hollow oscillating power lever, the rod of which protrudes above the end of the swinging power arm, while the gripper is mounted to rotate relative to the swinging power arm with rearrangement of the working about in a neutral position and fixing it in these positions.
Кроме того, передний узел крепления автономного модуля включает в себя закрепленный на несущем корпусе передний кронштейн и поворотную переднюю опору с горизонтальной цапфой, на которой передний кронштейн установлен с возможностью поворота на 180° без смещения вдоль горизонтальной цапфы, а задний узел крепления автономного модуля включает в себя закрепленный на несущем корпусе задний кронштейн и поворотную заднюю опору с горизонтальной цапфой, на которой задний кронштейн установлен с возможностью поворота на 180° без смещения вдоль горизонтальной цапфы, при этом передняя и задняя поворотные опоры соосно закреплены на задней стенке подлокотника.In addition, the front mounting unit of the stand-alone module includes a front bracket mounted on a supporting body and a pivoting front support with a horizontal pin, on which the front bracket is mounted to rotate 180 ° without offset along the horizontal pin, and the rear mounting unit of the stand-alone module includes a rear bracket fixed to a bearing body and a rotary rear support with a horizontal pin, on which the rear bracket is mounted rotatably 180 ° without displacement along the mountains zontally spigot, the front and rear rotary support axially fixed to the rear wall of the armrest.
При этом поворотная передняя опора включает в себя вертикальную ось и поддерживающий уголковый элемент с присоединенной к нему горизонтальной осью.In this case, the rotatable front support includes a vertical axis and a supporting corner element with a horizontal axis attached to it.
Кроме того, в нейтральном положении несущий корпус установлен на цапфах так, что качающийся силовой рычаг средства физической разминки рук простирается вниз, а захват зафиксирован на качающемся силовом рычаге параллельно несущему корпусу.In addition, in the neutral position, the bearing housing is mounted on the pins so that the swinging power arm of the physical hand warming means extends downward, and the grip is fixed on the swinging power arm parallel to the bearing housing.
При этом в рабочем положении несущий корпус установлен на цапфах так, что качающийся силовой рычаг средства физической разминки рук простирается вверх, а захват зафиксирован на качающемся силовом рычаге перпендикулярно несущему корпусу.At the same time, in the working position, the bearing housing is mounted on the pins so that the swinging power lever of the physical hand warming means extends upward, and the grip is fixed on the swinging power lever perpendicular to the bearing body.
Кроме того, передняя и задняя опоры шарнирно закреплены на задней стенке своего подлокотника с возможностью поворота относительно вертикальной оси на 90°.In addition, the front and rear supports are pivotally mounted on the rear wall of their armrest with the possibility of rotation relative to the vertical axis by 90 °.
При этом система регулирования усилия на захватах качающихся силовых рычагов оснащена подключенным к поршневым пневматическим нагружателям ресивером и регулирующим клапанным блоком, размещенным между ресивером и поршневыми пневматическими нагружателями и включающим в себя входной коллектор, к которому подсоединены оба поршневых пневматических нагружателя, выходной коллектор, к которому присоединен ресивер, обратный клапан забора воздуха из атмосферы, подключенный к входному коллектору, параллельно установленные обратный клапан подачи сжатого воздуха в ресивер и клапан-переключатель режимов, соединяющие входной и выходной коллекторы между собой, и управляемый клапан контроля давления в ресивере, подключенный к выходному коллектору.In this case, the force control system on the grips of the swinging power levers is equipped with a receiver connected to the piston pneumatic loaders and a control valve block located between the receiver and the piston pneumatic loaders and includes an input manifold to which both piston pneumatic loaders are connected, an output manifold to which is connected receiver, check valve for air intake from the atmosphere, connected to the inlet manifold, parallel check valve compressed air supply to the receiver and a mode switch valve connecting the input and output manifolds to each other, and a controlled pressure control valve in the receiver connected to the output manifold.
Кроме того, регулирующий клапанный блок размещен на одном из его подлокотников.In addition, the control valve block is located on one of its armrests.
При этом ресивер размещен под сиденьем.In this case, the receiver is located under the seat.
Кроме того, каждый подлокотник оснащен створкой, закрывающей его полость с внешней стороны.In addition, each armrest is equipped with a sash that covers its cavity from the outside.
Для достижения поставленных целей средство для физической разминки рук в положении сидя, содержащее силовую конструкцию, на которой закреплены поршневой пневматический нагружатель с пневматическим поршневым цилиндром, качающийся силовой рычаг с захватом для руки, и кинематическую передачу, связывающую качающийся силовой рычаг со штоком поршневого цилиндра, согласно изобретению дополнительно оснащено устройством для создания линейного усилия, размещенным внутри полого качающегося силового рычага.To achieve the goals, a means for physically warming up the hands in a sitting position, comprising a power structure on which a piston pneumatic loader with a pneumatic piston cylinder is fixed, a swinging power lever with a hand grip, and a kinematic transmission connecting the swinging power lever with the piston rod, according to the invention is additionally equipped with a device for creating a linear force placed inside a hollow oscillating power arm.
При этом устройство для создания линейного усилия оснащено поршневым гидравлическим нагружателем, шток которого выступает над торцом качающегося силового рычага.In this case, the device for creating linear force is equipped with a piston hydraulic loader, the rod of which protrudes above the end of the swinging power lever.
Кроме того, указанное средство выполнено в виде автономного модуля, включающего в себя несущий корпус, внутри которого размещен поршневой пневматический нагружатель, а с внешней стороны шарнирно закреплен полый качающийся силовой рычаг, при этом захват установлен с возможностью поворота относительно качающегося силового рычага с перестановкой из рабочего в нейтральное положение и фиксацией его в указанных положениях.In addition, the specified tool is made in the form of an autonomous module that includes a bearing housing, inside of which a piston pneumatic loader is placed, and a hollow swinging power lever is pivotally fixed on the outside, while the gripper is mounted to rotate relative to the swinging power lever with the permutation of the working in a neutral position and fixing it in these positions.
При этом поршневой пневматический нагружатель оснащен вторым пневматическим цилиндром, выполненным аналогично первому пневматическому цилиндру и установленным параллельно ему, оба цилиндра шарнирно закреплены на силовой конструкции, а кинематическая передача оснащена пазовым кулачковым механизмом, включающим в себя, по крайней мере, один диск с двумя дуговыми прорезями, расположенными диаметрально противоположно относительно друг друга, в каждой из которых размещен палец, закрепленный соответственно на одном из штоков пневматических цилиндров, причем диск закреплен на оси силового рычага так, что каждая прорезь размещена симметрично относительно продольной оси рычага, при полностью выдвинутых штоках оба пальца находятся у дальней стенки прорезей, пневматические полости цилиндров соединены между собой.At the same time, the piston pneumatic loader is equipped with a second pneumatic cylinder, made similar to the first pneumatic cylinder and mounted parallel to it, both cylinders are pivotally mounted on the power structure, and the kinematic transmission is equipped with a grooved cam mechanism, which includes at least one disk with two arc slots diametrically opposed to each other, in each of which is placed a finger, mounted respectively on one of the rods pneumatically their cylinders, the drive force is fixed to the lever axis so that each slot arranged symmetrically about the longitudinal axis of the lever, when fully extended rods of both fingers are on the far wall of the slots, cavities pneumatic cylinders interconnected.
Кроме того, прорези выполнены по дуговому сектору с углом 90°.In addition, the slots are made along the arc sector with an angle of 90 °.
При этом пазовый кулачковый механизм оснащен двумя дисками, закрепленными на оси параллельно друг другу, при этом штоки пневматических цилиндров поршневого пневматического нагружателя размещены в зазоре между дисками.In this case, the grooved cam mechanism is equipped with two disks mounted on an axis parallel to each other, while the piston rods of the pneumatic cylinders of the piston pneumatic loader are placed in the gap between the disks.
Кроме того, силовая конструкция выполнена в виде несущего корпуса, охватывающего пневматические цилиндры и кулачковый механизм, а качающийся силовой рычаг размещен снаружи несущего корпуса и соединен с диском кулачкового механизма осью, пропущенной через стенку несущего корпуса.In addition, the power structure is made in the form of a bearing housing covering the pneumatic cylinders and the cam mechanism, and the swinging power lever is located outside the bearing housing and is connected to the cam disk by an axis passed through the wall of the bearing housing.
В основу изобретения положено выполнение каждого из средств для физической разминки рук в виде автономного модуля и представляющего собой законченную конструкцию, которую можно перемещать в пространстве целиком, а оснащение автономного модуля передним и задним узлами крепления к креслу, каждый из которых выполнен с двумя степенями свободы, обеспечивающими возможность поворота автономного модуля относительно двух взаимно перпендикулярных осей с фиксацией его в нейтральном и рабочем положениях, дает возможность разместить каждый автономный модуль в соответствующем полом подлокотнике. При этом в нейтральном положении автономный модуль целиком убран в подлокотник и при выполнении каких-либо рутинных работ не создает никакой помехи пользователю кресла. Поворот автономного модуля относительно первой (горизонтальной) оси обеспечивает перевод его из нейтрального в первое рабочее положение над подлокотником с движением качающегося рычага и руки перпендикулярно спинке стула с нагруженном одной группы мышц. Поворот автономного модуля относительно второй (вертикальной) оси обеспечивает перевод его во второе рабочее положение с движением качающегося рычага и руки параллельно спинке стула с нагружением другой группы мышц.The basis of the invention is the implementation of each of the means for physical warm-up of hands in the form of an autonomous module and representing a complete structure that can be moved in space as a whole, and equipping the autonomous module with front and rear attachment points to the chair, each of which is made with two degrees of freedom, providing the ability to rotate the autonomous module relative to two mutually perpendicular axes with fixing it in neutral and working positions, makes it possible to place each car -alone unit in a corresponding hollow arm. At the same time, in the neutral position, the autonomous module is completely removed into the armrest and does not interfere with the user of the chair when performing any routine work. The rotation of the autonomous module relative to the first (horizontal) axis ensures its translation from neutral to the first working position above the armrest with the movement of the swinging arm and arm perpendicular to the back of the chair with one muscle group loaded. The rotation of the autonomous module relative to the second (vertical) axis ensures its translation into the second working position with the movement of the swinging lever and arm parallel to the back of the chair with loading of another muscle group.
Предложенная конструкция автономного модуля, включающего в себя несущий корпус, внутри которого размещен поршневой пневматический нагружатель, а с внешней стороны шарнирно закреплен полый качающийся силовой рычаг, а устройство для создания линейного усилия выполнено в виде размещенного внутри полого качающегося силового рычага поршневого гидравлического нагружателя, шток которого выступает над торцом качающегося силового рычага, при этом захват установлен с возможностью поворота относительно качающегося силового рычага с перестановкой из рабочего в нейтральное положение и фиксацией его в указанных положениях, обеспечивает жесткость автономного модуля, так как несущий корпус воспринимает все нагрузки. При этом размещение устройства для создания линейного усилия внутри автономного модуля обеспечивает дополнительно еще одно движение руками (линейное перемещение). Поворот захвата относительно качающегося силового рычага обеспечивает компактную компоновку автономного модуля в подлокотнике и удобство захвата рукой в рабочем положении.The proposed design of an autonomous module, which includes a bearing housing, inside of which a piston pneumatic loader is placed, and a hollow oscillating power lever is pivotally fixed on the outside, and a device for creating linear force is made in the form of a piston hydraulic loader placed inside a hollow oscillating force lever, the rod of which protrudes above the end of the swinging power arm, while the gripper is mounted to rotate relative to the swinging power arm ovkoy from the working to the neutral position and locking it in said positions provides rigidity standalone module, since the supporting frame takes all the load. Moreover, the placement of the device to create a linear force inside the autonomous module provides an additional one more hand movement (linear movement). The rotation of the grip relative to the swinging power arm provides a compact layout of the stand-alone module in the armrest and the convenience of hand grip in the working position.
Возможность поворота автономного модуля в двух относительно двух взаимно перпендикулярных осей обеспечивается конструкцией переднего и заднего узлов крепления, каждый из которых имеет в своем составе вертикальную ось и горизонтальную цапфу. Установка несущего корпуса на горизонтальных цапфах без смещения вдоль них повышает жесткость конструкции.The ability to rotate an autonomous module in two relatively two mutually perpendicular axes is provided by the design of the front and rear attachment points, each of which has a vertical axis and a horizontal trunnion. Installation of the bearing housing on horizontal trunnions without displacement along them increases the rigidity of the structure.
Предложенная конструкция передней поворотной опоры обеспечивает надежную передачу усилия на заднюю стенку подлокотника.The proposed design of the front swivel support provides reliable transmission of force to the rear wall of the armrest.
Установка несущего корпуса в нейтральном положении на цапфах так, что качающийся силовой рычаг средства физической разминки рук простирается вниз, и фиксация захвата на качающемся силовом рычаге параллельно несущему корпусу, обеспечивает компактную компоновку автономного модуля в подлокотнике.The installation of the bearing housing in the neutral position on the trunnions so that the swinging power lever of the means of physical warm-up of the hands extends downward, and fixing the grip on the swinging power lever parallel to the bearing housing, provides a compact layout of the stand-alone module in the armrest.
Установка несущего корпуса в рабочем положении на цапфах так, что качающийся силовой рычаг средства физической разминки рук простирается вверх, и фиксация захвата на качающемся силовом рычаге перпендикулярно несущему корпусу, обеспечивает удобство пользования при выполнении физических упражнений в первом рабочем положении.The installation of the bearing body in the working position on the pins so that the swinging power lever of the physical hand warming means extends upward, and the fixation of the grip on the swinging power lever perpendicular to the bearing body, provides ease of use when performing physical exercises in the first working position.
Поворот передней и задней опор относительно вертикальной оси на 90° обеспечивает перевод средства физической разминки рук во второе рабочее положение.The rotation of the front and rear supports relative to the vertical axis by 90 ° ensures the translation of the means of physical warm-up of hands in the second working position.
Оснащение системы регулирования усилия на захватах качающихся силовых рычагов подключенным к поршневым пневматическим нагружателям ресивером и регулирующим клапанным блоком, размещенным между ресивером и поршневыми пневматическими нагружателями и включающим в себя входной коллектор, к которому подсоединены оба поршневых пневматических нагружателя, выходной коллектор, к которому присоединен ресивер, обратный клапан забора воздуха из атмосферы, подключенный к входному коллектору, параллельно установленные обратный клапан подачи сжатого воздуха в ресивер и клапан-переключатель режимов, соединяющие входной и выходной коллекторы между собой, и управляемый клапан контроля давления в ресивере, подключенный к выходному коллектору, позволяет пользователю самому в зависимости от его ощущений выбрать давление в ресивере и соответственно уровень физической нагрузки на качающихся силовых рычагах, при этом предельное давление в ресивере и пневматических нагружателях можно ограничивать, задавая соответствующий объем ресивера, что исключает эксплуатацию кресла с повышенными усилиями на качающихся силовых рычагах, предотвращая случайное травмирование пользователя.The equipment of the force control system on the grips of the swinging power arms connected to the receiver connected to the piston pneumatic loaders and the control valve block located between the receiver and the piston pneumatic loaders and including an input manifold to which both piston pneumatic loaders are connected, an output collector to which the receiver is connected, atmospheric air intake check valve connected to the inlet manifold of air into the receiver and a mode switch valve connecting the input and output collectors to each other, and a controlled pressure control valve in the receiver connected to the output manifold allows the user to choose the pressure in the receiver and, accordingly, the level of physical load on the oscillating ones, depending on his sensations power levers, while the maximum pressure in the receiver and pneumatic loaders can be limited by setting the appropriate volume of the receiver, which excludes the operation of the chair with increased bubbled efforts on swinging levers of power, preventing accidental injury to the user.
Размещение регулирующего клапанного блока на одном из его подлокотников обеспечивает комфортные условия при настройке системы регулирования усилия на качающемся силовом рычаге.Placing a control valve block on one of its armrests provides comfortable conditions when setting up a force control system on a swinging power arm.
Оснащение каждого подлокотника створкой, закрывающей его полость с внешней стороны, позволяет сохранить привычные для пользователя внешние очертания кресла.Equipping each armrest with a shutter that covers its cavity from the outside allows you to save the exterior shape of the chair that is familiar to the user.
Оснащение средство для физической разминки рук в положении сидя устройством для создания линейного усилия, размещенным внутри полого качающегося силового рычага, позволяет помимо нагрузки типа "качания" обеспечить нагрузки типа "жим"-"толчок", расширяя гамму нагрузок, создаваемых предложенным средством.Equipping a means for physically warming up the hands in a sitting position with a device for creating linear force placed inside a hollow swinging power arm allows, in addition to the load of the "swing" type, to provide loads of the "press" - "push" type, expanding the range of loads created by the proposed tool.
Оснащение устройства для создания линейного усилия поршневым гидравлическим нагружателем, шток которого выступает над торцом качающегося силового рычага, обеспечивает безопасность выполнения упражнений типа "жим"-"толчок", так как при любом снятии нагрузки шток прекращает движение.The equipment of the device for creating linear force with a piston hydraulic loader, the rod of which protrudes above the end of the swinging power lever, ensures the safety of performing press-push exercises, since the rod stops moving when the load is relieved.
Выполнение средства для физической разминки рук в виде автономного модуля, включающего в себя несущий корпус, внутри которого размещен поршневой пневматический нагружатель, а с внешней стороны шарнирно закреплен полый качающийся силовой рычаг, обеспечивает высокую конструктивную жесткость, так как все нагрузки воспринимаются несущим корпусом, и высокую степень технологической готовности автономного модуля, так как его можно изготовить в виде отдельного блока, полностью готового к установке на любом кресле. Установка захвата с возможностью поворота относительно качающегося силового рычага с перестановкой из рабочего в нейтральное положение и фиксацией его в указанных положениях, обеспечивает возможность компактной компоновки его в подлокотнике.The implementation of the means for physical warm-up of hands in the form of an autonomous module, which includes a bearing body, inside of which a piston pneumatic loader is placed, and a hollow swinging power arm is pivotally fixed on the outside, provides high structural rigidity, since all loads are perceived by the bearing case, and high the degree of technological readiness of an autonomous module, since it can be made in the form of a separate unit, completely ready for installation on any seat. The installation of the grip with the possibility of rotation relative to the swinging power arm with rearrangement from the worker to the neutral position and fixing it in the indicated positions, makes it possible to compactly fit it in the armrest.
Наличие в поршневом пневматическом нагружателе двух установленных параллельно друг другу идентичных пневматических цилиндров, пневматические полости которых соединены между собой, при выбранной конструкции кинематической передачи обеспечивает возможность получения усилия на рычаге при прямом и обратном качаниях, причем каждый цилиндр будет работать независимо друг от друга, что обеспечивает одинаковую величину усилия на рычаге при прямом и обратном качаниях, а также дает возможность использовать один и тот же пневматический нагружатель при установке его справа или слева от сиденья. Шарнирное крепление обоих пневматических поршневых цилиндров упрощает конструкцию пневматического нагружателя.The presence of two identical pneumatic cylinders mounted in parallel with each other in a piston pneumatic loader, the pneumatic cavities of which are connected to each other, with the selected kinematic transmission design, makes it possible to obtain lever forces during forward and reverse swings, and each cylinder will operate independently of each other, which ensures the same amount of effort on the lever for forward and reverse swing, and also makes it possible to use the same pneumatic load Atel when it is installed on the right or the left of the seat. The articulation of both pneumatic piston cylinders simplifies the design of the pneumatic loader.
Выполнение прорезей по дуговому сектору с углом 90° обеспечивает наиболее рациональный диапазон качания силового рычага.Making slots in the arc sector with an angle of 90 ° provides the most rational range of swing of the power arm.
Оснащение пазового кулачкового механизма двумя дисками, закрепленными на оси параллельно друг другу, при этом штоки пневматических цилиндров поршневого пневматического нагружателя размещены в зазоре между дисками, повышает жесткость кинематической передачи и исключает появление поперечных усилий в пазовом кулачковом механизме.Equipping the grooved cam mechanism with two disks mounted on an axis parallel to each other, while the piston pneumatic cylinder piston rods are placed in the gap between the disks, increases the kinematic transmission rigidity and eliminates lateral forces in the grooved cam mechanism.
Выполнение силовой конструкции поршневого пневматического нагружателя в виде несущего корпуса, охватывающего пневматические цилиндры и кулачковый механизм, с размещением качающегося силового рычага снаружи несущего корпуса и соединение его с диском кулачкового механизма осью, пропущенной через стенку несущего корпуса, позволяет выполнить средство для физической разминки ног в виде автономного модуля.The implementation of the power design of the piston pneumatic loader in the form of a bearing housing, covering the pneumatic cylinders and the cam mechanism, with the placement of the swinging power lever outside the bearing housing and connecting it to the cam mechanism disk with an axis passed through the wall of the bearing housing, allows the means for physical leg warming up in the form autonomous module.
Технический результат заключается в создании домашнего или офисного кресла, которое легко преобразовать в устройство для выполнения физических упражнений в положении сидя, обеспечив при этом достаточно широкую гамму движений руками: "жим", "толчок", "качания", "сгиб/разгиб" и т.п.The technical result consists in creating a home or office chair, which is easy to convert into a device for performing physical exercises in a sitting position, while providing a fairly wide range of hand movements: "press", "push", "swing", "bend / bend" and etc.
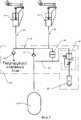
На фиг.1 и 2 изображен общий вид кресла при выполнении физических упражнений (откидная створка, закрывающая полость левого подлокотника смещена в положение "открыто"); на фиг.3 - левый подлокотник кресла в увеличенном масштабе во втором рабочем положении; на фиг.4 - общий вид кресла с убранным в подлокотник автономным модулем; на фиг.3 и 6 - конструктивная схема средства для физической разминки руки в двух проекциях; на фиг.7 - пневматическая схема системы регулирования усилия на качающемся силовом рычаге. Конструкция кресла на чертежах представлена схематически в объеме, достаточном для понимания изобретения, но без конкретной проработки отдельных узлов, которые достаточно распространены в общем машиностроении.Figures 1 and 2 show a general view of the chair during physical exercises (the flap closing the cavity of the left armrest is shifted to the "open" position); figure 3 - left armrest of the chair on an enlarged scale in the second working position; figure 4 is a General view of the chair with the autonomous module removed in the armrest; figure 3 and 6 is a structural diagram of the means for physical warm-up hands in two projections; 7 is a pneumatic diagram of a system for regulating efforts on a swinging power arm. The design of the chair in the drawings is presented schematically in a volume sufficient to understand the invention, but without specific study of the individual nodes, which are quite common in general engineering.
Кресло (XR-Chair, XRS-Chair или FUCHAIR) содержит основание 1, на котором закреплена силовая рама. Кресло имеет сиденье 2, спинку 3 с подголовником 4, правый 5 и левый 6 полые подлокотники. Каждый подлокотник оснащен створкой 7, закрывающей его полость с внешней стороны. Створка 7 может иметь любую известную подвеску, конструкция которой в рамках данной заявки не рассматривается. В кресло встроена система выполнения физических упражнений в положении сидя, имеющая два многофункциональных средства физической разминки рук, размещенных с двух сторон относительно сиденья 2. Средства для физической разминки рук в положении сидя, расположенные с правой и левой стороны сиденья, выполнены однотипными и далее описывается только одно из них.The chair (XR-Chair, XRS-Chair or FUCHAIR) contains the base 1, on which the power frame is mounted. The chair has a seat 2, a back 3 with a head restraint 4, right 5 and left 6 hollow armrests. Each armrest is equipped with a sash 7, which covers its cavity from the outside. Sash 7 may have any known suspension, the design of which is not considered in the framework of this application. The chair has a built-in system for performing physical exercises in the sitting position, which has two multifunctional means of physical warm-up of the hands placed on both sides relative to seat 2. The means for the physical warm-up of the hands in the sitting position, located on the right and left sides of the seat, are made of the same type and is described below only one of them.
Каждое средство для физической разминки рук выполнено в виде автономного модуля 8, установленного в подлокотнике и оснащенного передним 9 и задним 10 узлами крепления его к креслу. Каждый узел крепления выполнен с двумя степенями свободы, обеспечивающими возможность поворота автономного модуля относительно двух взаимно перпендикулярных горизонтальной и вертикальной осей. Каждый задний узел крепления оснащен стопорами 11 и 12 для фиксации соответствующего автономного модуля в нейтральном и рабочих положениях.Each means for physical warm-up of the hands is made in the form of an
Каждый автономный модуль 8 включает в себя несущий корпус 13, который является основной силовой конструкцией данного модуля. Внутри корпуса 13 размещен поршневой пневматический нагружатель 14, а с внешней стороны шарнирно закреплен полый качающийся силовой рычаг 15 с захватом 16. Захват 16 оснащен подвижной относительно силового рычага 15 втулкой 17 и может поворачиваться относительно качающегося силового рычага на 90° с перестановкой из рабочего в нейтральное положение. На внутренней поверхности втулки 17 выполнен паз 18, в котором установлен клиновой фиксатор 19 с язычком 20. На конце качающегося силового рычага 15 установлено упругое кольцо 21, препятствующее смещению захвата за пределы силового рычага. Качающийся силовой рычаг 15 выполнен полым и внутри него размещено устройство для создания линейного усилия, представляющее собой поршневой гидравлический нагружатель, включающий в себя перемещающийся полый шток 22 с жиклером 23 и закрепленную на выступающем за пределы качающегося силового рычага конце штока 22 рукоятку 24. Как и во всех поршневых гидравлических нагружателях внутренняя полость его частично заполнена жидкостью, которая при перемещении штока 22 перетекает через жиклер 23 из одной полости нагружателя в другую, создавая физическое усилие на рукоятке 24.Each
Поршневой пневматический нагружатель 14 имеет два пневматических поршневых цилиндра 25 и 26. Цилиндры установлены параллельно друг другу и выполнены идентичными. В цилиндре 25 установлен поршень 27 с выступающим за пределы цилиндра штоком 28. В цилиндре 26 установлен поршень 29 с выступающим за пределы цилиндра штоком 30. Пневматические полости 31 и 32 цилиндров соединены между собой гибким трубопроводом 33 и имеют общий выходной трубопровод 34. Штоковая полость каждого цилиндра соединена с атмосферой любым известным способом (дренажное отверстие, отсутствие уплотнения штока и т.п., на чертеже не показано). Оба поршневых цилиндра шарнирно закреплены на торцевой стенке 35 корпуса 13. Качающийся силовой рычаг 15 размещен снаружи корпуса 13 и жестко закреплен на оси 36, пропущенной через боковую стенку корпуса. Ось 36 проходит между штоками 28 и 30 и связана с ними кинематической передачей, оснащенной пазовым кулачковым механизмом, включающим в себя два параллельных диска 37, в каждом из которых выполнены две дуговые прорези 38 и 39, расположенные диаметрально противоположно относительно друг друга. Прорези выполнены по дуговому сектору с углом 90°. Диски 37 закреплены на оси 36 качающегося силового рычага 15 так, что каждая прорезь размещена симметрично относительно продольной оси рычага 15. Штоки 28 и 30 поршневых цилиндров нагружателя 14 размещены в зазоре между дисками 37. В прорезях 38 и 39 размещены пальцы 40 и 41, закрепленные соответственно на штоках 28 и 30 поршневых цилиндров. При полностью выдвинутых штоках 28 и 30 оба пальца находятся у дальней стенки прорезей 38 и 39. Корпус 13 охватывает поршневые цилиндры 25 и 26 и диски 37 кулачкового механизма.The
Кресло имеет систему регулирования усилия на захватах качающихся силовых рычагов, оснащенную ресивером 42, соединенным с поршневыми пневматическими нагружателями 14 через регулирующий клапанный блок 43, включающий в себя входной коллектор 44, к которому подсоединены выходные трубопроводы 34 обоих нагружателей 14, выходной коллектор 45, к которому присоединен ресивер 42, обратный клапан 46 забора воздуха из атмосферы, подключенный к входному коллектору 44, параллельно установленные обратный клапан 47 подачи сжатого воздуха в ресивер 42 и клапан-переключатель 48 режимов, соединяющие входной 44 и выходной 45 коллекторы между собой, и управляемый клапан 49 контроля давления в ресивере, подключенный к выходному коллектору 45. На выходе управляемого клапана 49 контроля давления в ресивере установлен глушитель 50 шума. Ресивер 42 установлен под сиденьем 2. Регулирующий клапанный блок 43 размещен на одном из подлокотников кресла, например, на правом подлокотнике 5. В качестве клапана-переключателя 48 режимов может использоваться любое запирающее устройство, имеющее два положения: "открыто" и "закрыто". В качестве управляемого клапана 49 может использоваться любой регулятор давления перед собой.The seat has a force control system on the grips of the swinging power levers, equipped with a
Передний узел 9 крепления автономного модуля включает в себя закрепленный на несущем корпусе 13 передний кронштейн 51 и поворотную переднюю опору 52. Поворотная передняя опора включает в себя вертикальную ось 53, поддерживающий уголковый элемент 54 и присоединенную к нему горизонтальную ось 55 с горизонтальной цапфой 56, на которой передний кронштейн 51 установлен с возможностью поворота на 180° без смещения вдоль горизонтальной цапфы 56. Горизонтальная ось 55 соединяется с поддерживающим уголковым элементом любым известным образом. Горизонтальная полка 57 поддерживающего уголкового элемента 54 выполнена с изгибом 58. Вертикальная ось 53 установлена во втулке 59, закрепленной на силовом элементе 60 задней стенки подлокотника.The
Задний узел 10 крепления автономного модуля включает в себя закрепленный на несущем корпусе 13 задний кронштейн 61 и поворотную заднюю опору 62, включающую в себя вертикальную ось 63 и присоединенную к ней горизонтальную ось 64 с горизонтальной цапфой 65, на которой задний кронштейн 61 установлен с возможностью поворота на 180° без смещения вдоль горизонтальной цапфы 65. Горизонтальная ось 64 соединяется с вертикальной осью 63 любым известным образом. Вертикальная ось 63 установлена во втулке 66, закрепленной на силовом элементе 60 задней стенки подлокотника. Задний узел крепления оснащен стопорами 11 и 12 для фиксации автономного модуля в нейтральном или рабочих положениях. Стопоры могут быть любого типа (винтовые зажимы, фиксирующие штифты и т.п.) и их конструкция в рамках данной заявки не рассматривается. Вертикальные оси 53 и 63 закреплены на задней стенке подлокотника соосно, обеспечивая передней и задней опорам возможность поворота относительно вертикальной оси на 90°. Вертикальные оси 53 и 63 могут быть выполнены раздельно или жестко соединены друг с другом, например, размещены на концах стержня.The
В нейтральном положении (фиг.4) несущий корпус 13 установлен на цапфах 56 и 65 так, что качающийся силовой рычаг 15 средства физической разминки рук простирается вниз и размещается в изгибе 58. Захват 16 зафиксирован на качающемся силовом рычаге параллельно несущему корпусу.In the neutral position (Fig. 4), the bearing
В обоих рабочих положениях (фиг.1 и 2) несущий корпус 13 установлен на цапфах 56 и 65 так, что качающийся силовой рычаг 15 средства физической разминки рук простирается вверх. Захват 16 зафиксирован на качающемся силовом рычаге перпендикулярно несущему корпусу 13.In both operating positions (FIGS. 1 and 2), the supporting
В нормальном рабочем положении кресла, когда пользователь выполняет рутинную работу, например на компьютере, или смотрит телевизор, оба средства для физической разминки рук находятся внутри подлокотников и закрыты снаружи створками 7. Качающийся силовой рычаг 15 простирается вниз, а захват 16 для руки расположен параллельно боковой кромке сиденья 2. Кресло имеет привычный вид, и ничто не мешает пользователю заниматься рутинной работой.In the normal working position of the chair, when the user performs routine work, for example on a computer, or watches TV, both means for physically warming up the hands are located inside the armrests and are closed externally by the shutters 7. The swinging
На период выполнения физических упражнений (физическая разминка рук) пользователь смещает створки 7 в открытое положение. Средства для физической разминки рук в положении сидя, расположенные с правой и левой стороны сиденья, выполнены однотипными и далее описывается работа с одним из них. Все операции по работе со средствами для физической разминки рук могут быть осуществлены пользователем, не сходя с кресла.For the period of performing physical exercises (physical warm-up of the hands), the user shifts the shutters 7 to the open position. Means for physical warm-up of hands in a sitting position, located on the right and left sides of the seat, are made of the same type and the work with one of them is described below. All operations for working with means for physical warm-up of the hands can be carried out by the user without leaving the chair.
Пользователь освобождает стопор 11, поворачивает автономный модуль 8 на 180° относительно горизонтальной оси и фиксирует его в этом положении стопором 11 (первое рабочее положение). Качающийся силовой рычаг 15 направлен вверх, а захват 16 располагается параллельно подлокотнику. Освобождают фиксатор 19 и поворачивают захват 16 внутрь на 90°. Захваты 16 на правом и левом рычагах 15 будут направлены навстречу друг другу. В данном положении пользователь может выполнять несколько физических упражнений. Взявшись рукой за захват, пользователь может качать рычаг 15 "взад-вперед", как это показано для правого качающегося силового рычага (фиг.1).The user releases the
Пользователь, сидя в кресле, настраивает управляемый клапан 49 на давление, соответствующее требуемому усилию, устанавливает клапан-переключатель 48 в положение "закрыто" и начинает работать с качающимися силовыми рычагами 15. При синхронном покачивании обоих силовых рычагов 15 оба пневматических нагружателя 14 будут работать на закачку воздуха в ресивер 42, и оба нагружателя работают одинаково. В пневмосистеме после выполнения предыдущей физической разминки всегда будет сохраняться некоторое остаточное давление, под действием которого поршни 27 и 29 смещаются в крайнее положение, как это показано на фиг.5. Пальцы 40 и 41 находятся у дальней стенки пазов 38 и 39. Силовой рычаг 15 может качаться "взад-вперед" в пределах 90°. При смещении силового рычага 15 вперед поворачиваются диски 37 пазового кулачкового механизма. Палец 40 перемещается по дуге окружности и перемещает вперед поршень 27, сжимая воздух в полости 31 поршневого цилиндра 25. Поршень 29 остается в конечном положении, так как прорезь 39 имеет возможность беспрепятственно перемещаться относительно пальца 41. Сжатый воздух закачивается через обратный клапан 47 в ресивер 42. При обратном движении силового рычага 15 поршень 29 продолжает оставаться в конечном положении, а поршень 27 под действием сжатого воздуха в полости 31 начинает смещаться в обратном направлении, пока давление в полостях 31 и 32 не станет равным атмосферному, и поршень 27 остановится в некотором промежуточном положении. Силовой рычаг 15 продолжает движение, и вместе с ним поворачиваются диски 37, пока передняя торцевая стенка паза 38 не войдет в контакт с пальцем 40. При дальнейшем движении силового рычага 15 палец 40 движется совместно с дисками 37 и перемещает поршень 27. Давление в полостях 31 и 32 падает и через обратный клапан 46 засасывается новая порция атмосферного воздуха. Закачка воздуха продолжается до тех пор, пока не сработает управляемый клапан 49 контроля давления в ресивере и можно начинать выполнять физические упражнения с номинальным усилием на качающихся силовых рычагах 15. Клапан-переключатель 48 режимов переводится в положение "открыто" и давление в ресивере 42 и поршневых пневматических нагружателях 14 выравнивается. Поршни 27 и 29 в обоих пневматических нагружателях перемещаются в крайнее положение, показанное на фиг.5. При качании силового рычага 15 относительно нейтрального положения один из поршней всегда будет смещаться, уменьшая объем воздушной полости в своем цилиндре. При этом в параллельном ему соседнем цилиндре в течение всего цикла этого качания воздушная полость будет иметь максимальный объем, и с учетом объема ресивера 42 смещение поршня не приведет с существенному изменению давления в пневматических нагружателях, сохраняя неизменным усилие на качающихся силовых рычагах 15 независимо от того, выполняются ли одновременные, или попеременные движения рук. Качания могут осуществляться одной рукой, или двумя руками синхронно или в противофазе. По окончании физической разминки качающиеся силовые рычаги 15 всегда будут находиться в нейтральном положении.The user, sitting in a chair, adjusts the controlled
Взявшись руками за рукоятки 24, пользователь также может выполнять руками движение "вверх-вниз". При этом движении шток 22 совершает возвратно-поступательные движения внутри качающегося силового рычага 15. Жидкость через жиклер 23 перетекает из полости штока 22 в полость качающегося силового рычага 15 и обратно. Перепад давления на жиклере 23 определяет величину прилагаемого физического усилия.By holding the
Для перевода автономного модуля 8 во второе рабочее положение освобождают стопор 12, поворачивают автономный модуль вокруг вертикальной оси на 90° и фиксируют его в этом положении стопором 12. Захваты 16 располагаются параллельно друг другу. Взявшись рукой за захват, пользователь может качать рычаг 15 "вправо-влево", как это показано для правого качающегося силового рычага (фиг.2), расширяя диапазон физических упражнений. Работа силового нагружателя 14 во втором рабочем положении не отличается от описанной ранее. Используя рукоятку 24, пользователь может также выполнять движение рукой вверх-вниз, аналогично ранее описанному.To translate the stand-
По окончании выполнения физических упражнений пользователь освобождает стопор 12, поворачивает автономный модуль на 90°, устанавливая его параллельно боковой кромке сиденья, и фиксирует его в данном положении стопором 12, освобождают фиксатор захвата 16, поворачивают захват 16, устанавливают его параллельно подлокотнику и фиксируют его в этом положении. Затем освобождают стопор 11, поворачивают автономный модуль на 180° относительно горизонтальной оси, перемещая качающийся силовой рычаг 15 вниз, как это показано на фиг.3, фиксируют автономный модуль в нейтральном положении и закрывают подлокотник створкой 7, возвращая креслу привычный рабочий облик. Никаких препятствий для выполнения рутинной работы не существует.At the end of the exercise, the user releases the
По желанию пользователя кресло может быть оснащено надувными подушками с подключением их к ресиверу через клапанный блок, как это показано в заявке РСТ WO 01/040012.At the request of the user, the chair can be equipped with inflatable pillows with connecting them to the receiver through the valve block, as shown in PCT application WO 01/040012.
Предлагаемое кресло может быть изготовлено промышленным способом с использованием современных материалов и технологий. При реализации изобретения могут использоваться различные конструктивные исполнения стопоров, надувных подушек и других элементов кресла, отличающиеся от описанных в данной заявке и приведенных на чертежах, иллюстрирующих изобретение, без отхода от духа и рамок настоящего изобретения, определяемых объемом притязаний, изложенных в формуле изобретения.The proposed chair can be manufactured industrially using modern materials and technologies. When implementing the invention, various designs of stoppers, airbags and other elements of the chair can be used, different from those described in this application and shown in the drawings illustrating the invention, without departing from the spirit and scope of the present invention defined by the scope of the claims set forth in the claims.
Claims (18)
Translated fromRussianPriority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2004119867/12ARU2250066C1 (en) | 2004-06-30 | 2004-06-30 | Office or domestic arm-chair with device for stretching arms in sitting posture |
| PCT/RU2005/000035WO2006004452A1 (en) | 2004-06-30 | 2005-02-03 | Office or household armchair and means for physical stretching of arms in a sitting position |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2004119867/12ARU2250066C1 (en) | 2004-06-30 | 2004-06-30 | Office or domestic arm-chair with device for stretching arms in sitting posture |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU2250066C1true RU2250066C1 (en) | 2005-04-20 |
Family
ID=35634814
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2004119867/12ARU2250066C1 (en) | 2004-06-30 | 2004-06-30 | Office or domestic arm-chair with device for stretching arms in sitting posture |
Country Status (2)
| Country | Link |
|---|---|
| RU (1) | RU2250066C1 (en) |
| WO (1) | WO2006004452A1 (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110465043A (en)* | 2018-05-10 | 2019-11-19 | 上海理工大学 | A kind of multi-joint rehabilitation training instrument |
| CN110465052A (en)* | 2018-05-10 | 2019-11-19 | 上海理工大学 | A kind of button finger function recovery training appliance for recovery |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5007632A (en)* | 1989-10-12 | 1991-04-16 | Wilkinson William T | Combination sit-up, rowing, arm, leg and foot exercise device |
| US5090694A (en)* | 1990-03-28 | 1992-02-25 | Nordictrack, Inc. | Combination chair and exercise unit |
| US5234394A (en)* | 1991-04-24 | 1993-08-10 | Wilkinson William T | Universal, portable exercise apparatus adaptable to fit a chair |
| US5470298A (en)* | 1994-06-27 | 1995-11-28 | Curtis; James L. | Exercise apparatus |
| US5755650A (en)* | 1995-11-08 | 1998-05-26 | Urso; Charles L. | Home and office health and fitness chair |
| RU2128479C1 (en)* | 1988-03-23 | 1999-04-10 | Хилл-Ром, Инк. | Patient supporting device (variants) and method of supporting the man's body on mattress |
- 2004
- 2004-06-30RURU2004119867/12Apatent/RU2250066C1/ennot_activeIP Right Cessation
- 2005
- 2005-02-03WOPCT/RU2005/000035patent/WO2006004452A1/enactiveApplication Filing
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2128479C1 (en)* | 1988-03-23 | 1999-04-10 | Хилл-Ром, Инк. | Patient supporting device (variants) and method of supporting the man's body on mattress |
| US5007632A (en)* | 1989-10-12 | 1991-04-16 | Wilkinson William T | Combination sit-up, rowing, arm, leg and foot exercise device |
| US5090694A (en)* | 1990-03-28 | 1992-02-25 | Nordictrack, Inc. | Combination chair and exercise unit |
| US5234394A (en)* | 1991-04-24 | 1993-08-10 | Wilkinson William T | Universal, portable exercise apparatus adaptable to fit a chair |
| US5470298A (en)* | 1994-06-27 | 1995-11-28 | Curtis; James L. | Exercise apparatus |
| US5755650A (en)* | 1995-11-08 | 1998-05-26 | Urso; Charles L. | Home and office health and fitness chair |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2006004452A1 (en) | 2006-01-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20090195040A1 (en) | Variable configuration seating | |
| KR102560311B1 (en) | Treatment unit and massage machine using treatment unit | |
| WO2011070825A1 (en) | Chair-type massaging machine provided with leg massaging device | |
| CN107183977A (en) | A kind of thing to sit on | |
| RU2250066C1 (en) | Office or domestic arm-chair with device for stretching arms in sitting posture | |
| CN210330014U (en) | Sofa linkage support device | |
| RU2250067C1 (en) | Office or domestic arm-chair and device for physical stretching of legs in sitting posture | |
| CN111513504A (en) | Multifunctional office chair | |
| RU2250068C1 (en) | Office or domestic arm-chair provided with physical stretching units | |
| CN112294557B (en) | Bed-chair integrated nursing bed | |
| CN111642923B (en) | A new type of chair | |
| CN208658355U (en) | A lumbar support seat driven by a connecting rod | |
| CN115670162B (en) | Balance gravity adjusting mechanism, seat and balance gravity adjusting method | |
| JP4674720B2 (en) | Chair | |
| JP6586229B2 (en) | Lumbar support chair | |
| CN207055241U (en) | The leisure chaise longue that a kind of human body power control step is closed flat | |
| CN208658356U (en) | A lumbar support seat driven by a rack | |
| CN212088876U (en) | Office chair | |
| CN212437933U (en) | A new type of chair | |
| CN208160452U (en) | A kind of thing to sit on | |
| CN208658359U (en) | A lumbar support seat driven by wire drawing | |
| JP4810046B2 (en) | Chair locking device | |
| CN216822405U (en) | Outdoor chair with telescopic footrest structure | |
| CN220512509U (en) | Ergonomic folding chair | |
| KR200321056Y1 (en) | Improved armchair |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees | Effective date:20070701 |