RU2241312C2 - System and method for timing base stations in asynchronous code-division multiple access mobile communication system - Google Patents
System and method for timing base stations in asynchronous code-division multiple access mobile communication systemDownload PDFInfo
- Publication number
- RU2241312C2 RU2241312C2RU2000123436/09ARU2000123436ARU2241312C2RU 2241312 C2RU2241312 C2RU 2241312C2RU 2000123436/09 ARU2000123436/09 ARU 2000123436/09ARU 2000123436 ARU2000123436 ARU 2000123436ARU 2241312 C2RU2241312 C2RU 2241312C2
- Authority
- RU
- Russia
- Prior art keywords
- mobile station
- time difference
- estimate
- base stations
- relative time
- Prior art date
Links
Images



Landscapes
- Mobile Radio Communication Systems (AREA)
Abstract
Description
Translated fromRussianОбласть техникиTechnical field
Настоящее изобретение относится к области мобильной связи, более конкретно, к способу и системе обеспечения синхронизации базовых станции в асинхронной системе мобильной связи множественного доступа с кодовым разделением каналов (МДКРК).The present invention relates to the field of mobile communications, and more particularly, to a method and system for providing synchronization of base stations in an asynchronous code division multiple access (CDMA) mobile communication system.
Предшествующий уровень техникиState of the art
Системы мобильной связи МДКРК с прямой модуляцией последовательностью (МДКРК-ПМП) могут представлять собой системы с синхронизацией между ячейками или асинхронные между ячейками. Другими словами, базовые станции (БС) в системе с синхронизацией между ячейками точно синхронизированы друг с другом, а базовые станции в системе с асинхронными ячейками не синхронизированы. Более конкретно, асинхронные БС совместно не используют общую систему отсчета времени, и их передачи, поэтому, имеют произвольное хронирование, не определенное предварительно относительно друг друга. Примером системы с синхронизацией между ячейками является Североамериканская система IS-95. Примерами систем с асинхронными ячейками являются широкополосные МДКРК (III-МДКРК) системы, предложенные в технических требованиях CODIT, ETSI SMG2 Group Alpha Европейского института стандартизации в области связи ARIB.CDMA systems with direct sequence modulation (CDMA-PMP) can be systems with synchronization between cells or asynchronous between cells. In other words, base stations (BS) in a system with synchronization between cells are precisely synchronized with each other, and base stations in a system with asynchronous cells are not synchronized. More specifically, asynchronous BSs do not share a common time reference system, and their transmission, therefore, have an arbitrary timing not previously determined relative to each other. An example of a system with synchronization between cells is the North American system IS-95. Examples of systems with asynchronous cells are the broadband CDMA (III-CDMA) systems proposed in the technical requirements of CODIT, ETSI SMG2 Group Alpha of the European Institute for Standardization in Communications ARIB.
Главный недостаток систем с синхронизацией между ячейками заключается в том, что БС должны быть очень точно синхронизированы (с точностью до микросекунд). Такой высокий уровень точности обычно обеспечивают с помощью высокоточных систем отсчета времени, совмещенных с БС, таких как приемники сигналов Глобальной системы позиционирования (ГСП). Однако, из-за характера распространения спутникового сигнала в зоне прямой видимости, использование таких совмещенных систем отсчета времени, вероятно, не выполнимо для БС, расположенных в метрополитене, строениях или туннелях. Другим связанным с этим недостатком является то, что система ГСП управляется правительственным ведомством. Следовательно, использование приемников ГСП для синхронизации сети БС может оказаться нежелательным в некоторых национальных регионах. Эти недостатки являются главными причинами того, что в настоящее время рассматриваются асинхронные системы, в которых отсутствует синхронизация между ячейками.The main disadvantage of systems with synchronization between cells is that BSs must be very accurately synchronized (accurate to microseconds). Such a high level of accuracy is usually achieved using high-precision time reference systems combined with BSs, such as Global Positioning System (GPS) signal receivers. However, due to the nature of the propagation of the satellite signal in the line of sight, the use of such combined time frames is probably not feasible for BS located in the subway, buildings or tunnels. Another related drawback is that the SHG system is managed by a government department. Therefore, the use of GPS receivers to synchronize a BS network may be undesirable in some national regions. These shortcomings are the main reasons that asynchronous systems that lack synchronization between cells are currently being considered.
Чтобы такие асинхронные системы работали должным образом, следует учитывать два принципиально важных вопроса функционирования: (1) процедуры гибкого переключения каналов связи (ГПК); и (2) процедуры поиска в ячейке. В состоянии ГПК мобильная станция (МС) осуществляет связь с несколькими БС одновременно. Для обеспечения процедуры ГПК, МС постоянно сканирует пространство в поисках другой БС поблизости. МС может при этом контролировать качество принятого сигнала от множества БС и определять время задержки БС. Для реализации процедуры ГПК осуществляющая гибкое переключение каналов связи должна иметь возможность принять сигнал "целевой" БС (т.е. БС, на которую осуществляется переключение) приблизительно в то же время, что и сигнал "исходной" (т.е. БС, с которой осуществляется переключение), чтобы минимизировать требования буферизации (то есть, меньшая разность во времени между сигналами БС требует меньшего объема буфера, чем большие разности во времени). Также, целевая БС должна иметь возможность обнаружить сигнал МС без неприемлемого расхода ресурсов на обработку сигналов.In order for such asynchronous systems to work properly, two fundamentally important issues of operation should be considered: (1) procedures for flexible switching of communication channels (GPC); and (2) cell search procedures. In the GPC state, a mobile station (MS) communicates with several BS simultaneously. To ensure the GIC procedure, the MS constantly scans the space in search of another BS nearby. The MS can at the same time control the quality of the received signal from the set of BS and determine the delay time of the BS. To implement the GPC procedure, the flexible switching of communication channels should be able to receive the signal of the “target” BS (i.e., the BS to which switching is carried out) at approximately the same time as the signal of the “source” (i.e. BS, s which is switched) in order to minimize buffering requirements (that is, a smaller time difference between BS signals requires a smaller buffer volume than large time differences). Also, the target BS should be able to detect the MS signal without unacceptable consumption of resources for signal processing.
Эти проблемы ГПК решены для асинхронных систем с помощью способа синхронизации "на вызов" (см. A Design Study for a CDMA Eased Third-Generation Mobile Radio System. A.Baier и др., IEEE JSAC, vol.12, стр. 733-743, май 1994). Используя этот способ, МС, осуществляющая процедуру ГПК, вычисляет и сообщает в сеть разность во времени между целевой БС и исходной БС. Сеть оповещает целевую БС через контроллер базовых станций (КБС) или контроллер радиосети (КРС) о разности во времени. Целевая БС может затем настраивать свои временные характеристики приема и передачи по отношению к сигналу, предназначенному для МС, совершающей ГПК, чтобы компенсировать разность.These GPA problems are resolved for asynchronous systems using the on-call synchronization method (see A Design Study for a CDMA Eased Third-Generation Mobile Radio System. A.Baier et al., IEEE JSAC, vol. 12, p. 733- 743, May 1994). Using this method, the MS implementing the GPC procedure calculates and reports the time difference between the target BS and the source BS to the network. The network notifies the target BS through the base station controller (BSC) or the radio network controller (RNC) about the time difference. The target BS may then adjust its timing of reception and transmission with respect to the signal intended for the MS performing the ACG to compensate for the difference.
Используют аналогичный известный способ ГПК, в котором МС сообщает о разности в хронировании между передачей целевой БС и своей собственной передачей вместо разности между передачей целевой БС и передачей исходной БС. Однако, так как соотношение хронирования передачи, приема для МС всегда является фиксированным, два описанных выше способа ГПК, по существу, являются эквивалентными. Такие методы определяются как процедуры переключения каналов связи, поддерживаемые мобильной станцией (ПКПМ). Другими словами, МС помогает целевой БС в компенсации разности в хронировании между целевой БС и исходной БС.A similar well-known GPC method is used, in which the MS reports the timing difference between the transmission of the target BS and its own transmission instead of the difference between the transmission of the target BS and the transmission of the original BS. However, since the ratio of timing of transmission to reception for MS is always fixed, the two methods of the CCP described above are essentially equivalent. Such methods are defined as communication channel switching procedures supported by the mobile station (PKPM). In other words, the MS helps the target BS to compensate for the difference in timing between the target BS and the original BS.
Поиск ячейки в целом относится к процедуре, посредством которой МС выполняет синхронизацию элементов кода, слотов (временных интервалов) и кадров с БС, и определяет код скремблирования БС в прямой (нисходящей) линии связи. Эту процедуру используют и во время включения питания (начальная синхронизация) и непрерывно после этого в течение неактивных или активных режимов, в то время как МС осуществляет поиск БС-кандидатов для ГПК. В синхронной системе поиск ячейки может быть выполнен эффективно (то есть, с относительно низким уровнем сложности), так как одинаковый код скремблирования может быть использован всеми БС. Таким образом, МС может выполнить полный поиск БС, используя только единственный согласованный фильтр (или аналогичные функциональные средства). Однако этот же способ не может быть использован в асинхронной системе из-за различных кодов скремблирования, используемых различными БС. Следовательно, возникла потребность в быстрой и несложной процедуре поиска ячейки для асинхронных систем МДКРК.Cell search generally refers to the procedure by which the MS synchronizes the code elements, slots (time intervals) and frames from the BS, and determines the BS scrambling code in the forward (downlink) communication line. This procedure is used during power-up (initial synchronization) and continuously after that during inactive or active modes, while the MS searches for BS candidates for the CCP. In a synchronous system, a cell search can be performed efficiently (that is, with a relatively low level of complexity), since the same scrambling code can be used by all BSs. Thus, the MS can perform a full BS search using only a single matched filter (or similar functionality). However, the same method cannot be used in an asynchronous system due to the different scrambling codes used by different BSs. Consequently, a need arose for a quick and uncomplicated cell search procedure for asynchronous CDMA systems.
Была предложена быстрая многоэтапная процедура поиска ячейки для асинхронных систем МДКРК, посредством которой каждая БС передает один немодулированный символ. Этот переданный символ расширяют глобально-известным коротким кодом без кода скремблирования в каждом слоте каждого кадра. В одном таком известном решении этот символ обозначен как "Символ-метка 1, маскированный длинным кодом (СМДК)". В другом известном решении этот символ обозначен как "канал синхронизации" или первичный КнС. В предложенной многоэтапной процедуре МС может таким образом устанавливать синхронизацию с элементом кода и временным интервалом сигнала БС, используя единственный согласованный фильтр, который согласован с первичным КнС. Затем МС еще должна найти кадровую синхронизацию с БС и код скремблирования в прямой линии связи (который занимает один кадр в предложенной многоэтапной процедуре). МС может найти кадровую синхронизацию с БС, детектируя второй регулярно передаваемый символ, который обозначен как "Символ-метка 2 СМДК " или "вторичный КнС".A fast multi-stage cell search procedure was proposed for asynchronous CDMA systems, by which each BS transmits one unmodulated symbol. This transmitted symbol is extended with a globally known short code without a scrambling code in each slot of each frame. In one such well-known solution, this symbol is designated as “Label Symbol 1 Disguised as a Long Code (SMDK)”. In another known solution, this symbol is referred to as a “synchronization channel” or primary KnC. In the proposed multi-stage procedure, the MS can thus establish synchronization with the code element and the time interval of the BS signal using a single matched filter that is matched with the primary KnSS. Then, the MS still has to find the frame synchronization with the BS and the scrambling code in the forward link (which takes up one frame in the proposed multi-stage procedure). The MS can find the frame synchronization with the BS by detecting the second regularly transmitted symbol, which is designated as "Symbol-mark 2 SMDK" or "secondary Kns".
Этот второй символ передают параллельно с первым символом, но второй символ расширяют вторым коротким кодом (снова без кода скремблирования). Второй символ может также иметь уникальный повторяющийся шаблон модуляции на кадр, и, обнаруживая этот шаблон, МС может определять кадровую синхронизацию БС. Расширяющий код, используемый для второго символа, указывает МС, к какой группе возможных кодов скремблирования принадлежит фактически используемый код скремблирования. МС может затем найти используемый код скремблирования посредством сопоставления с кодами скремблирования, принадлежащими к указанной группе, при идентифицированной выше кадровой синхронизации (или при различных возможных кадровых синхронизациях). Однако проблема, связанная с предложенной многоэтапной процедурой, состоит в том, что уровень сложности поиска ячейки является все еще относительно высоким, особенно в случае поиска кандидата для ГПК (который МС должна выполнять систематически).This second character is transmitted in parallel with the first character, but the second character is expanded with a second short code (again without a scrambling code). The second symbol may also have a unique repeating modulation pattern per frame, and, detecting this pattern, the MS can determine the frame synchronization of the BS. The extension code used for the second symbol indicates to the MS which group of possible scrambling codes the actual scrambling code belongs to. The MS may then find the scrambling code to be used by matching with the scrambling codes belonging to the indicated group with the frame synchronization identified above (or with various possible frame synchronizations). However, the problem associated with the proposed multi-stage procedure is that the level of complexity of the cell search is still relatively high, especially in the case of the search for a candidate for GPC (which the MS should perform systematically).
Другая проблема, связанная с асинхронными между ячейками системами, состоит в том, что разность в синхронизации между БС затрудняет определение положения МС все более необходимыми становятся системы мобильной связи, обеспечивающие определение положения МС в системе. В настоящее время определение местоположения мобильной станции обычно выполняют при помощи внешних систем, таких как системы ГСП. Предпочтительно, однако, чтобы определение местоположения мобильной станции было выполнено самой сотовой системой связи без необходимости в таких внешних системах. Чтобы выполнить такое определение местоположения в сотовой системе, необходим способ точного определения абсолютных или относительных расстояний между МС и каждой из нескольких различных БС. Расстояния могут быть вычислены с использованием времени распространения, времени прихода (ВП), или измерения разности во времени прихода (РВП) сигналов, передаваемых между МС и каждой из нескольких различных БС. Если эти измерения доступны, то существует множество алгоритмов, чтобы вычислить географическое положение МС. Например, согласно способу с использованием ВП, расстояние от МС до каждой из БС получают, используя измерения ВП. Каждое из этих расстояний может быть представлено, как радиус круга с соответствующей БС в центре. Другими словами, измерение ВП может быть использовано для определения радиального расстояния МС от конкретной БС, но направление не может быть определено на основании единственного измерения ВП; таким образом, МС может лежать в любом месте на круге, определенном вычисленным радиусом. Посредством определения пересечения кругов, связанных с каждой из нескольких различных БС, однако, может быть определено положение МС. Способ, основанный на использовании РВП, с другой стороны, использует разность в ВП между двумя БС, чтобы определить РВП между этими двумя БС. При этом МС находится на кривой, а именно на гиперболе, в соответствии с вычислением РВП. Используя три или более БС, можно получить более одной таких кривых. Пересечение этих кривых дает приблизительное положение МС.Another problem associated with systems asynchronous between cells is that the difference in synchronization between BSs makes it difficult to determine the position of the MS. Mobile communication systems providing the determination of the position of the MS in the system become more and more necessary. Currently, the location of a mobile station is usually performed using external systems such as GPS systems. Preferably, however, the location of the mobile station is performed by the cellular communication system itself without the need for such external systems. In order to perform such positioning in a cellular system, a method for accurately determining the absolute or relative distances between the MS and each of several different BSs is needed. Distances can be calculated using propagation time, arrival time (VP), or measuring the difference in time of arrival (RP) of the signals transmitted between the MS and each of several different BSs. If these measurements are available, then there are many algorithms to calculate the geographic location of the MS. For example, according to the method using VP, the distance from the MS to each of the BSs is obtained using measurements of the VP. Each of these distances can be represented as the radius of a circle with the corresponding BS in the center. In other words, the measurement of the airspace can be used to determine the radial distance of the MS from a specific BS, but the direction cannot be determined based on a single measurement of the airspace; Thus, the MS can lie anywhere on the circle defined by the calculated radius. By determining the intersection of the circles associated with each of several different BS, however, the position of the MS can be determined. The method based on the use of RVP, on the other hand, uses the difference in the airspace between the two BSs to determine the RVP between these two BSs. In this case, the MS is on the curve, namely on the hyperbole, in accordance with the calculation of the RVP. Using three or more BSs, more than one such curve can be obtained. The intersection of these curves gives an approximate position of the MS.
В самом простом способе определения расположения мобильной станции процедуру ГПК осуществляют для множества БС. Во время каждой из этих процедур ГПК может быть измерено время распространения между каждой БС и МС. Местоположение МС может быть затем определено на основе триангуляции положения мобильной станции. Этот способ определения местоположения является простейшим для осуществления, так как он требует очень небольших изменений в конструкции мобильной радиостанции. К тому же, БС не нуждаются в абсолютной системе отсчета времени; то есть, этот способ может использоваться в асинхронной сотовой системе связи. Однако из-за различия в географическом положении между различными БС, передача обслуживания к двум другим иначе географически расположенным БС возможна только в небольшом количестве случаев.In the simplest way to determine the location of a mobile station, the GPC procedure is carried out for multiple BSs. During each of these GPC procedures, the propagation time between each BS and MS can be measured. The location of the MS can then be determined based on the triangulation of the position of the mobile station. This location method is the easiest to implement, since it requires very small changes in the design of a mobile radio station. In addition, BSs do not need an absolute reference system of time; that is, this method can be used in an asynchronous cellular communication system. However, due to differences in the geographical position between different BSs, a handover to two other otherwise geographically located BSs is possible only in a small number of cases.
Другими словами, если МС находится в непосредственной близости одной БС, то процедура ГПК на другие БС будет часто невозможна. Это имеет место из-за того, что "слышимость" сигналов между МС и множеством БС будет обычно неудовлетворительной.In other words, if the MS is in the immediate vicinity of one BS, then the GPC procedure for other BSs will often be impossible. This is due to the fact that the "audibility" of the signals between the MS and many BS will usually be unsatisfactory.
Другое возможное решение состоит в использовании антенной решетки в БС. Если БС имеет антенную решетку, положение МС может быть вычислено посредством оценки направления, с которого приходят сигналы обратной линии связи и измерения задержки прямого и обратного прохождения сигнала связи.Another possible solution is to use an antenna array in the BS. If the BS has an antenna array, the position of the MS can be calculated by estimating the direction from which the signals of the reverse link come and measuring the delay of the forward and reverse transmission of the communication signal.
В этом способе требуется, чтобы МС осуществляла связь только с одной БС, чтобы вычислить положение. Однако, широкое использование антенных решеток для целей определения положения является дорогостоящим. Кроме того, влияние особенностей многолучевого распространения сигналов в прямой и обратной линиях связи приводят к нежелательности использования антенной решетки, особенно в городах, где сигналы отражаются от зданий и других предметов.This method requires that the MS communicate with only one BS in order to calculate the position. However, the widespread use of antenna arrays for positioning purposes is expensive. In addition, the influence of the features of multipath signal propagation in the forward and reverse communication lines leads to the undesirability of using an antenna array, especially in cities where signals are reflected from buildings and other objects.
Как отмечено выше, также возможно, что средства приема сигналов ГСП могут быть встроены в мобильную станцию без использования дополнительных радиоприемников. Этот способ, однако, требует чрезмерной сложности вычислений и приводит к усложнению конструкции приемника в МС.As noted above, it is also possible that the means for receiving GPS signals can be integrated into a mobile station without the use of additional radios. This method, however, requires excessive computational complexity and complicates the design of the receiver in the MS.
Другое решение состоит в измерении времени распространения, ВП или РВП, для сигналов, переданных от БС к МС или от МС к БС. Например, может использоваться решение для прямой линии связи при котором, в случае МДКРК, МС измеряет ВП данных канала пилот-сигнала, которые переданы несколькими различными БС. Альтернативно, может использоваться решение для обратной линии связи, при котором каждая из нескольких БС измеряет ВП сигнала, переданного мобильной станцией к множеству БС. Однако оба этих способа требуют абсолютной или точной относительной системы отсчета времени, или синхронизации, базовых станций БС. Поэтому решения для прямой и обратной линий связи обычно требуют дополнительного оборудования (например, приемник ГСП, расположенный в БС, чтобы осуществить синхронизацию БС) в асинхронной сети.Another solution is to measure the propagation time, VP or RVP, for signals transmitted from the BS to the MS or from the MS to the BS. For example, a forward link solution may be used in which, in the case of CDMA, the MS measures the IP of the pilot channel data that are transmitted by several different BSs. Alternatively, a reverse link solution may be used in which each of the multiple BSs measures the airspace of the signal transmitted by the mobile station to the multiple BSs. However, both of these methods require an absolute or accurate relative time reference system, or synchronization, of BS base stations. Therefore, solutions for the forward and reverse links usually require additional equipment (for example, a GPS receiver located in the BS to synchronize the BS) in an asynchronous network.
Необходимы система и способ для снижения сложности ресурсов обработки, используемых во время поиска ячейки и процедур определения местоположения мобильных станций в асинхронных сетях. В частности, было бы предпочтительно использовать столько априорной информации поиска, насколько это возможно, чтобы способствовать уменьшению сложности и увеличению скорости поиска ячейки и получить упрощенные решения для определения положения мобильных станций. Как описано подробно ниже, настоящее изобретение успешно решает вышеуказанные проблемы.A system and method are needed to reduce the complexity of processing resources used during cell search and location procedures for mobile stations in asynchronous networks. In particular, it would be preferable to use as much a priori search information as possible to help reduce complexity and increase cell search speed and obtain simplified solutions for determining the position of mobile stations. As described in detail below, the present invention successfully solves the above problems.
Сущность изобретенияSUMMARY OF THE INVENTION
Предлагаются способ и система для обеспечения синхронизации базовых станций в асинхронных системах мобильной связи МДКРК, посредством которых исходный КБС (или КРС) посылает к МС (например, в сообщении списка соседних ячеек) оценки относительной разности во времени (ОРВ) между исходной БС и каждой из БС в списке соседних ячеек. Для осуществления ГПК множество МС могут сообщать по сети оценки ОРВ наряду с информацией о качестве сигнала для соседней БС. Каждая БС может поддерживать таблицу оценки ОРВ, которая может непрерывно обновляться, исходя из сообщений ОРВ, полученных от МС. Затем БС может посылать записи из этой таблицы оценок ОРВ к МС в сообщении списка соседних ячеек наряду с соответствующими кодами скремблирования. При использовании этого нового способа, в БС известны относительные разности во времени. Следовательно, когда МС инициирует поиск ячейки для возможной целевой БС, МС уже имеет оценку синхронизации этой БС по сравнению с его исходной БС. Получающаяся в результате процедура поиска ячейки, используемая в асинхронной системе МДКРК, имеет более низкий уровень сложности и, таким образом, может быть выполнена намного быстрее, чем известные процедуры.A method and system for providing synchronization of base stations in asynchronous CDMA mobile communication systems by which the original BSC (or RNC) sends to the MS (for example, in a message in the list of neighboring cells) estimates of the relative time difference (ODS) between the source BS and each of BS in the list of neighboring cells. For GPC implementation, multiple MSs can report ODS estimates over the network along with signal quality information for a neighboring BS. Each BS can maintain an ODS rating table that can be continuously updated based on ODS messages received from the MS. Then, the BS can send entries from this ODS rating table to the MS in the message of the list of neighboring cells along with the corresponding scrambling codes. When using this new method, relative time differences are known in the BS. Therefore, when the MS initiates a cell search for a possible target BS, the MS already has an estimate of the synchronization of this BS compared to its original BS. The resulting cell search procedure used in the CDMA asynchronous system has a lower complexity level and thus can be performed much faster than the known procedures.
В другом аспекте изобретения точность оценок ОРВ может быть значительно улучшена посредством вычисления задержки распространения между МС и (несколькими) БС, которые используют для оценки ОРВ. Эти улучшенные ОРВ могут быть использованы для дальнейшего улучшения оценок синхронизации при выполнении поиска ячейки. Улучшенные ОРВ могут быть также использованы для вычисления положения мобильных станций МС в мобильной системе связи. Как только высокоточные ОРВ известны, расстояния между МС и несколькими БС могут быть легко определены с использованием времени распространения, ВП или РВП сигналов, передаваемых между МС и несколькими БС.In another aspect of the invention, the accuracy of the ODS estimates can be significantly improved by calculating the propagation delay between the MS and (several) BSs that are used to estimate the ODS. These improved ODSs can be used to further improve synchronization estimates when performing a cell search. Enhanced ODS can also be used to calculate the position of mobile MSs in a mobile communication system. Once high-precision ODSs are known, the distances between the MS and several BSs can be easily determined using the propagation time, VP, or SAR of the signals transmitted between the MS and several BSs.
Важное техническое преимущество настоящего изобретения заключается в том, что в соседних БС в асинхронной мобильной системе связи МДКРК известны относительные разности во времени.An important technical advantage of the present invention is that relative time differences are known in neighboring BSs in an asynchronous CDMA mobile communication system.
Другое важное техническое преимущество настоящего изобретения состоит в том, что сложность аппаратного и программного обеспечения МС в асинхронной мобильной системе связи МДКРК снижается.Another important technical advantage of the present invention is that the complexity of the hardware and software of the MS in an asynchronous CDMA mobile communication system is reduced.
Еще одно важное техническое преимущество настоящего изобретения состоит в том, что общий уровень сложности процедуры поиска ячейки в асинхронной мобильной системе связи МДКРК значительно снижается.Another important technical advantage of the present invention is that the overall complexity of the cell search procedure in an asynchronous CDMA mobile communication system is significantly reduced.
Следующее важное техническое преимущество, настоящего изобретения состоит в том, что скорость поиска ячейки, выполняемого в асинхронных системах мобильной связи МДКРК, значительно увеличивается по сравнению с известными способами.A further important technical advantage of the present invention is that the cell search speed performed in CDMA asynchronous mobile communication systems is significantly increased compared to known methods.
Другое важное техническое преимущество настоящего изобретения заключается в том, что определение местоположения мобильной станции может быть осуществлено в асинхронной мобильной системе связи путем выполнения простых вычислений над легко доступными данными и без необходимости во внешней системе.Another important technical advantage of the present invention is that the location of the mobile station can be carried out in an asynchronous mobile communication system by performing simple calculations on easily accessible data and without the need for an external system.
Краткое описание чертежейBrief Description of the Drawings
Способ и устройство, соответствующие настоящему изобретению, поясняются в нижеследующем подробном описании, иллюстрируемом чертежами, на которых показано следующее:The method and device corresponding to the present invention are explained in the following detailed description, illustrated by drawings, which show the following:
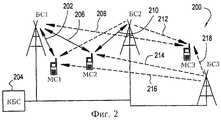
фиг.1. - последовательность операций, иллюстрирующую наилучший способ, который может использоваться для обеспечения синхронизации базовых станций в асинхронной мобильной системе связи МДКРК, в соответствии с предпочтительным вариантом осуществления настоящего изобретения, фиг.2 - упрощенная блок-схема наилучшей системы мобильной связи, которая может быть использована для осуществления способа, проиллюстрированного на фиг.1, в соответствии с предпочтительным вариантом осуществления настоящего изобретения;figure 1. - a flowchart illustrating the best method that can be used to provide synchronization of base stations in an asynchronous CDMA mobile communication system, in accordance with a preferred embodiment of the present invention, FIG. 2 is a simplified block diagram of a best mobile communication system that can be used for the implementation of the method illustrated in figure 1, in accordance with a preferred embodiment of the present invention;
фиг.3 - упрощенная блок-схема МС, которая уже находится или собирается войти в процедуру ГПК, и может быть использована для облегчения усовершенствованных вычислений синхронизации БС в асинхронной мобильной системе связи МДКРК в соответствии с предпочтительным вариантом осуществления настоящего изобретения;FIG. 3 is a simplified flowchart of an MS that is already located or about to enter the GPC procedure, and can be used to facilitate advanced BS synchronization calculations in an asynchronous CDMA mobile communication system in accordance with a preferred embodiment of the present invention;
фиг.4 - диаграмма относительной синхронизации сигналов, используемых в процедуре ГПК, изображенной на фиг.3;4 is a diagram of the relative synchronization of signals used in the GPC procedure depicted in figure 3;
фиг.5 - последовательность операций, иллюстрирующая наилучший способ, который может быть использован для определения положения МС в соответствии с одним из вариантов осуществления настоящего изобретения.5 is a flowchart illustrating the best method that can be used to determine the position of the MS in accordance with one embodiments of the present invention.
Подробное описание чертежейDetailed Description of Drawings
Предпочтительный вариант осуществления настоящего изобретения и его преимущества будут лучше поняты из описания со ссылками на фиг.1-5, на которых аналогичные числовые обозначения используют для подобных и соответствующих элементов на различных чертежах.A preferred embodiment of the present invention and its advantages will be better understood from the description with reference to figures 1-5, in which similar numerical designations are used for similar and corresponding elements in various drawings.
По существу, в асинхронной системе МДКРК в КБС известны коды скремблирования при передаче сигналов по прямой линии связи для всех его БС. Как правило, список соседних ячеек распространяют в каждой ячейке (для МС, работающей в нерабочем режиме), или передают по заранее выделенному каналу управления (для МС, работающей в активном режиме). Когда МС принимает информацию о соседних ячейках, она определяет коды скремблирования внесенных в список соседних ячеек, которые являются потенциальными ячейками-кандидатами на ГПК. Имея такое априорное знание об информации кода скремблирования для кандидата на ГПК/ ячейки дают возможность МС сократить общее время поиска в ячейке при осуществлении процедуры ГПК (или уровень сложности)/ так как количество возможных кодов скремблирования сокращается по сравнению с количеством при начальной синхронизации (включении питания). Однако даже если набор кодов скремблирования, по которым МС производит поиск, является относительно малым, в МС все равно не известна синхронизация этих кодов. Этот недостаток информации о синхронизации является главной причиной, почему существующие решения, относящиеся к поиску в ячейке в асинхронной системе, требуют больше времени (и являются более сложными), чем поиск в ячейке в синхронной системе.Essentially, in an asynchronous CDMA system in the BSC, scrambling codes are known when transmitting signals on a forward link for all of its BSs. As a rule, a list of neighboring cells is distributed in each cell (for an MS operating in idle mode), or transmitted via a pre-allocated control channel (for an MS operating in active mode). When the MS receives information about neighboring cells, it determines the scrambling codes of the neighboring cells in the list, which are potential candidate cells for GPC. Having such a priori knowledge about the information of the scrambling code for the candidate for CCP / cell enables the MS to reduce the total search time in the cell during the CCP procedure (or level of complexity) / since the number of possible scrambling codes is reduced compared to the number during initial synchronization (power on) ) However, even if the set of scrambling codes by which the MS searches is relatively small, the synchronization of these codes is still not known in the MS. This lack of synchronization information is the main reason why existing solutions related to searching in a cell in an asynchronous system take longer (and are more complex) than searching in a cell in a synchronous system.
Настоящее изобретение преодолевает этот недостаток, связанный с проблемой информации о синхронизации за счет того, что исходная БС посылает к МС (наряду со списком соседних ячеек) оценку ОРВ между исходной БС и каждой из БС в списке соседних ячеек. Другими словами, вместо посылки только кодов скремблирования соседних БС к МС, исходная БС также передает оценки ОРВ для каждой из них. Для осуществления ГПК МС может сообщать в сеть (на регулярной основе, по наступлению какого-либо события или по требованию от БС) оценки ОРВ наряду с информацией о качестве сигнала (например, мощности сигнала, отношении "сигнал-помеха" (ОСП) и т.д.) для соседних БС. В результате каждый КБС может поддерживать таблицу оценок ОРВ, которая может обновляться непрерывно, исходя из сообщений ОРВ, принятых от МС. В предпочтительном варианте осуществления настоящего изобретения таблица оценок ОРВ поддерживается в базе данных в КБС.The present invention overcomes this drawback associated with the problem of synchronization information due to the fact that the source BS sends to the MS (along with the list of neighboring cells) an ODS estimate between the source BS and each of the BSs in the list of neighboring cells. In other words, instead of sending only the scrambling codes of neighboring BSs to the MS, the original BS also transmits the ODS estimates for each of them. For the implementation of the GPC, the MS can report to the network (on a regular basis, upon the occurrence of an event or at the request of the BS) ODS estimates along with information about the signal quality (for example, signal strength, signal-to-noise ratio (SIR), etc. .d.) for neighboring BSs. As a result, each BSC can maintain an ODS rating table that can be updated continuously based on ODS messages received from the MS. In a preferred embodiment of the present invention, an ODS rating table is maintained in a database in the BSC.
Затем, контроллеры КБС могут посылать записи из этой таблицы оценок ОРВ к МС в сообщении списка соседних ячеек, наряду с соответствующими кодами скремблирования (причем КБС поддерживает отслеживание информации оценок ОРВ уже посланной в предыдущих сообщениях к МС). При использовании этого нового способа в БС известны относительные разности во времени. Следовательно, в наилучшем варианте осуществления, когда МС инициирует поиск потенциальной целевой БС, МС уже имеет оценку синхронизации этой БС (из информации об ОРВ) по сравнению со своей исходной БС. В результате процедура поиска ячейки, используемая в асинхронной системе МДКРК, может быть выполнена намного быстрее, чем в случаях известных процедур. Когда МС синхронизирована с потенциальной целевой БС, МС получает улучшенную оценку ОРВ, которую, в свою очередь, МС может передать назад к исходной БС (предпочтительно вместе с информацией о качестве для потенциальной целевой БС). Исходная БС (или связанный с ней КБС) может затем обновить эту запись в таблице оценок ОРВ.Then, the BSC controllers can send entries from this ODS rating table to the MS in the message of the list of neighboring cells, along with the corresponding scrambling codes (and the BSC supports tracking information of the ODS estimates already sent in previous messages to the MS). When using this new method, relative time differences are known in the BS. Therefore, in the best embodiment, when the MS initiates a search for a potential target BS, the MS already has an estimate of the synchronization of this BS (from ODS information) compared to its original BS. As a result, the cell search procedure used in an asynchronous CDMA system can be performed much faster than in cases of known procedures. When the MS is synchronized with the potential target BS, the MS receives an improved ODS estimate, which, in turn, the MS can transmit back to the original BS (preferably together with quality information for the potential target BS). The source BS (or its associated BSC) may then update this entry in the ODS rating table.
Более конкретно, фиг.1 изображает последовательность операций, иллюстрирующую наилучший способ 100, который может быть использован для обеспечения синхронизации БС и увеличения скорости поиска ячейки - кандидата на переключение каналов связи в асинхронной мобильной системе связи МДКРК, в соответствии с предпочтительным вариантом осуществления настоящего изобретения. На этапе 104 наилучшего способа, показанного на фиг.1, КБС формирует список соседних ячеек (например, "набор соседей" в системе IS-95) с соответствующими кодами скремблирования, вместе с множеством оценок ОРВ между исходной БС и соответствующими БС-кандидатами на переключение каналов связи из таблицы оценки ОРВ (предпочтительно поддерживаемой в базе данных в КБС). На этапе 106 исходная БС осуществляет широковещательную передачу или передает список соседних ячеек с кодами скремблирования и оценки ОРВ в "сообщении списка соседних ячеек" к задействованной МС. В действительности, КБС хранит данные отслеживания оценок ОРВ, который он посылает к МС, чтобы излишне не дублировать информацию ОРВ, которую МС может уже иметь. В этот момент МС имеет принятый список БС, с которыми она может синхронизироваться (и также информацию о качестве сообщения). Принятый список соседних ячеек может также включать в себя оценку неопределенности (описанную более подробно ниже). МС сохраняет информацию о списке соседних ячеек в локальной памяти.More specifically, FIG. 1 is a flowchart illustrating a best method 100 that can be used to provide BS synchronization and increase the search speed of a candidate candidate switching channel in a CDMA asynchronous mobile communication system, in accordance with a preferred embodiment of the present invention. At step 104 of the best method shown in FIG. 1, the BSC generates a list of neighboring cells (for example, a “set of neighbors” in the IS-95 system) with corresponding scrambling codes, together with a plurality of ODS estimates between the source BS and the corresponding switching BS candidates communication channels from the ODS rating table (preferably maintained in a database in the BSC). At step 106, the source BS broadcasts or transmits a list of neighboring cells with scrambling and ODS scoring codes in the “neighboring cell list message” to the MS involved. In fact, the BSC stores ODS score tracking data that it sends to the MS so as not to unnecessarily duplicate the ODS information that the MS may already have. At this point, the MS has an accepted list of BSs with which it can synchronize (and also message quality information). An accepted list of neighboring cells may also include an uncertainty estimate (described in more detail below). MS stores information about the list of neighboring cells in local memory.
На этапе 108, уже имея априорную информацию оценки (синхронизации) ОРВ соседней ячейки, вместе с другой соответствующей информацией о соседних ячейках, МС может инициировать первичный поиск ячейки, используя обычную конфигурацию согласованного фильтра. При использовании станцией МС согласованного фильтра для первичного поиска ячейки формируются пики сигналов, соответствующие сигналам БС, которые МС может принимать с достаточным качеством для определения ячеек - кандидатов на переключение каналов связи. На этапе 110 МС сопоставляет оценки ОРВ с полученными пиками сигнала согласованного фильтра, чтобы определить, какие пики наиболее вероятно соответствуют определенным скремблирования в списке соседних ячеек (этап 112). На этапе 114 на основании сопоставлений, полученных на этапе 112, МС может выбирать коды скремблирования для наиболее вероятной ячейки - кандидата на переключение каналов связи из списка соседних ячеек. МС может затем инициировать поиск ячейки (этап 116).At step 108, already having the prior information of the ODS estimation (synchronization) of the ODS of the neighboring cell, together with other relevant information about the neighboring cells, the MS can initiate the initial cell search using the conventional matching filter configuration. When the MS station uses a matched filter for the initial cell search, signal peaks are formed corresponding to BS signals, which the MS can receive with sufficient quality to determine the cells - candidates for switching communication channels. At step 110, the MS compares the ODS estimates with the received peaks of the matched filter signal to determine which peaks most likely correspond to certain scrambling in the list of neighboring cells (step 112). At step 114, based on the comparisons obtained at step 112, the MS can select the scrambling codes for the most likely cell — a candidate for switching communication channels from the list of neighboring cells. The MS may then initiate a cell search (step 116).
Теоретически, если вышеописанные оценки ОРВ совершенно точны, то МС могла бы игнорировать все пики выходного сигнала согласованного фильтра, не соответствующие информации "оценки" ОРВ. В этой гипотетической ситуации процедура сопоставления кода скремблирования (например, этап 112) в целом может быть опущена совсем. Однако в любом случае в соответствии с настоящим изобретением, использование в МС оценок ОРВ для определения наиболее вероятной ячейки - кандидата на переключение каналов связи из списка соседних ячеек позволяют МС игнорировать значительное количество пиков согласованного фильтра, и/или связать некоторые из этих пиков с соответствующими кодами скремблирования, что значительно снижает сложность процедуры поиска ячейки и существенно увеличивает скорость поиска.Theoretically, if the above estimates of ODS are completely accurate, then the MS could ignore all the peaks of the output of the matched filter that do not correspond to the information of the "assessment" of ODS. In this hypothetical situation, the procedure for matching the scrambling code (for example, step 112) as a whole can be omitted altogether. However, in any case, in accordance with the present invention, the use of ODS estimates in the MS to determine the most likely cell, a candidate for switching communication channels from the list of neighboring cells, allows the MS to ignore a significant number of peaks of the matched filter and / or associate some of these peaks with the corresponding codes scrambling, which significantly reduces the complexity of the cell search procedure and significantly increases the search speed.
Используя вышеописанный новый способ, каждая БС (ячейка), при содействии МС, соединенных с ней, имеют информацию о различиях в синхронизации относительно соседних с ней БС (ячеек). Если, по некоторым причинам, не имеется никаких МС, соединенных с конкретной БС, то таблица оценок ОРВ, соответствующая этой БС, не обновляется. Следовательно, так как относительное хронирование между соседними БС может непрерывно смещаться, неопределенность (или димерсия) записей в таблице оценок ОРВ для этой БС увеличится. Вообще, неопределенность в оценке ОРВ может увеличиваться со временем, но эта неопределенность обычно является минимальной сразу после завершения обновления, например на основании сообщения ОРВ, принятом от МС). Следовательно, для того, чтобы система связи была более устойчивой во время периодов неактивности МС (например, ночью, или в течение выходных в частных учрежденческих системах), как указано выше, оценка неопределенности ОРВ может быть распространена или передана из БС вместе с оценкой ОРВ в списке соседних ячеек. МС может затем, например, устанавливать (например, увеличивать) свое окно времени поиска соответственно, чтобы учесть дополнительный уровень неопределенности. МС может, таким образом, учесть и те БС, которые имеют относительно неопределенную информацию о своих ОРВ, и также минимизировать свой уровень сложности при формировании относительно определенных оценок ОРВ.Using the new method described above, each BS (cell), with the assistance of the MSs connected to it, has information about differences in synchronization with respect to neighboring BS (cells). If, for some reason, there are no MSs connected to a particular BS, then the ODS rating table corresponding to that BS is not updated. Therefore, since the relative timing between neighboring BSs can continuously shift, the uncertainty (or dimen sion) of the entries in the ODS rating table for this BS will increase. In general, the uncertainty in the estimation of ODS can increase over time, but this uncertainty is usually minimal immediately after the update is completed, for example, based on an ODS message received from the MS). Therefore, in order for the communication system to be more stable during periods of inactivity of the MS (for example, at night, or during weekends in private institutional systems), as indicated above, an estimate of the uncertainty of ODS can be distributed or transmitted from the BS along with an estimate of the ODS in list of neighboring cells. The MS can then, for example, set (eg, increase) its search time window, respectively, to take into account an additional level of uncertainty. The MS can, therefore, take into account those BSs that have relatively uncertain information about their ODS, and also minimize their level of complexity in forming relatively specific assessments of ODS.
Дополнительный способ для дальнейшего смягчения проблемы неопределенности в случае наличия слишком малого количества активных МС в течение относительно длительных периодов, состоит в размещении фиктивных МС в фиксированных местоположениях в системе. Эти "фиктивные" МС могут иметь ограниченные функциональные возможности, и могут вызываться БС, имеющими относительно высокую неопределенность записей в таблице оценок ОРВ для обеспечения обновления ОРВ. Такие "фиктивные" МС предпочтительнее расположить там, где они могут быть доступны для множества БС (например, около границ ячейки).An additional way to further mitigate the uncertainty problem in the case of the presence of too few active MSs for relatively long periods is to place fictitious MSs at fixed locations in the system. These "dummy" MSs may have limited functionality, and may be caused by BSs having relatively high uncertainty of entries in the ODS rating table to ensure ODS updates. It is preferable to arrange such “fictitious” MSs where they can be accessed by many BSs (for example, near the cell boundaries).
На фиг.2 показана упрощенная блок-схема примера системы 200 мобильной связи, которая может быть использована для осуществления способа 100 (фиг.1) для облегчения синхронизации (например, при наличии информации об относительных разностях во времени) БС и увеличения скорости поиска ячейки в соответствии с предпочтительным вариантом осуществления настоящего изобретения. Система 200 предпочтительно является асинхронной системой мобильной связи МДКРК, которая включает в себя, для иллюстративных целей, три БС и три МС. Однако должно быть понятно, что показанное количество БС и МС служит только для иллюстрации, и что типовая система может включать в себя более трех БС и трех МС. В этом примере МС1 работает в активном режиме, и связана через линию связи 202 интерфейса радиосвязи с БС1. В соответствии с этапом 106 способа 100 (фиг.1), МС1 принимает список соседних ячеек, предпочтительно включающий в себя соответствующие оценки ОРВ и дополнительно может связывать оценки неопределенности в заранее выделенном канале управления от БС 204 (через БС1, как только она "соединится" с МС1). По меньшей мере, две из соседних ячеек, имеющихся в списке в качестве записей в таблице оценок ОРВ, представляют собой БС2 и БС3. Систематически (или по требованию) МС1 осуществляет контроль и сообщает о качестве этих БС (мощности сигнала, ОСП, отношении сигнал-шум (ОСШ), частоте появления ошибочных битов (ЧОБ) и т.д.) в КБС 204 (через БС1). Так как МС1 имеет принятые оценки ОРВ от КБС 204 (через БС1), МС1 может синхронизироваться относительно быстро с БС2 и БС3, по меньшей мере, первой возможности, когда МС1 осуществляет поиск БС2 и БС3. Когда МС1 синхронизирована с БС2 (или БС3), можно предположить, что МС1 имеет "хорошую" оценку ОРВ для этой БС. Систематически или по требованию МС1 может сообщать КБС 204 (через БС1) об оценке качества сигнала, соответствующей, по меньшей мере одной из записей в списке соседних ячеек. В дополнение к оценкам качества, МС1 может также передавать текущую оценку ОРВ к КБС 204.FIG. 2 shows a simplified block diagram of an example
Ситуация поиска ячейки для МС2 аналогична ситуации для МС1, за исключением того, что в приведенном примере МС2 участвует в процедуре ГПК с использованием БС1 и БС2, и контролирует только одну другую БС (например, БСЗ через линию связи 214 интерфейса радиосвязи). В этом примере МС3 функционирует в дежурном режиме (не имеет установленного соединения), но она может контролировать БС согласно списку соседних ячеек, принятому по каналу широковещательной передачи БС, которую МС3 рассматривает как "наилучшую" для прослушивания (например, в этом случае БС3, через линию связи 218 интерфейса радиосвязи. МС3 может также контролировать БС1 (через линию связи 208 интерфейса радиосвязи и БС2 (через линию связи 212 интерфейса радиосвязи. Широковещательная передача оценок ОРВ станцией БС3 помогает МС3 синхронизироваться более быстро с БС1 и БС2, или, по меньшей мере, первый раз, когда происходит процедура синхронизации. Сложность поиска ячейки таким образом снижается, а скорость поиска ячейки значительно увеличивается.The cell search situation for MS2 is similar to the situation for MS1, except that in the above example, MS2 participates in the GPC procedure using BS1 and BS2, and controls only one other BS (for example, BSZ via the
Предпочтительно, каждая МС, работающая в системе 200 мобильной связи, передает свою измеренную оценку ОРВ систематически или по требованию к КБС 204 (через БС1). КБС 204 сохраняет оценки ОРВ, принятые от МС, в таблице оценок ОРВ. Альтернативно, каждая запись, сохраненная в таблице оценок ОРВ (то есть, представляющая оценку разности между парой базовых станций) может быть вычислена на основании оценок, принятых от множества различных МС. Например, сохраненная оценка может представлять среднее число предыдущих x принятых оценок, или оценок, принятых за предшествующие у минут. Значения в таблице могут быть обновлены посредством замены предыдущих оценок или повторным вычислением конкретных оценок, основанным на последних принятых данных. Значения, сохраненные в таблице, затем посылают к другой МС, как описано выше, вместе со списком соседних ячеек, для обеспечения синхронизации этих МС с соседними БС по мере необходимости. Кроме того, специалистам должно быть понятно, что нет необходимости таблицу оценок ОРВ сохранять в КБС 204; скорее, таблица может быть сохранена в одной или более баз данных, расположенных фактически в каком-либо узле сети (например, в регистре, связанном с КМС или в полностью отдельной базе данных).Preferably, each MS operating in the
В другом аспекте изобретения оценки ОРВ могут быть использованы, чтобы определить положение МС. Вычисление местоположения, однако, требует более точных оценок ОРВ, чем в случае поиска ячейки. Вот почему концепция определения местоположения мобильной станции, по существу, использует определение задержки распространения между МС и каждой из множества БС или на измерения ВП или РВП для различных БС. В большинстве случаев скорость поиска ячейки может быть значительно увеличена без необходимости вычисления задержек распространения. Таким образом, обычно достаточно основывать оценки ОРВ на разности во времени между двумя БС, которую измеряют одной или более мобильными станциями без учета задержек распространения сигналов в прямой линии связи, принятых в МС от каждой из БС. С другой стороны, чтобы выполнить определение положения мобильной станции необходима более точная оценка ОРВ.In another aspect of the invention, ODS estimates can be used to determine the position of the MS. The location calculation, however, requires more accurate ODS estimates than in the case of a cell search. That is why the concept of determining the location of a mobile station essentially uses the determination of propagation delay between the MS and each of the plurality of BSs or on the measurements of the airspace or SAR for different BSs. In most cases, the cell search speed can be significantly increased without the need to calculate propagation delays. Thus, it is usually sufficient to base ODS estimates on the time difference between two BSs, which is measured by one or more mobile stations without taking into account the propagation delays of the signals in the forward link received in the MS from each of the BSs. On the other hand, in order to determine the position of a mobile station, a more accurate assessment of ODS is needed.
Настоящее изобретение решает эту проблему за счет вычисления улучшенной ОРВ, которая учитывает задержки распространения сигналов в обратной и прямой линиях связи. По существу, улучшенная ОРВ является разностью между временем, когда первая БС начинает передавать свой сигнал по прямой линии связи и временем, когда вторая БС начинает передавать свой сигнал по прямой линии связи. Эта улучшенная оценка ОРВ может быть вычислена с использованием: (1) локального времени приема и передачи сигналов в обратной и прямой линиях связи в определенных БС, измеряемого в каждой из соответствующих БС и (2) разности ВП в МС сигналов прямой линии связи от БС, сообщения о которой передается мобильной станцией. Эта улучшенная информация ОРВ может быть затем использована другими мобильными станциями для определения местоположения.The present invention solves this problem by calculating an improved ODS that takes into account propagation delays in the reverse and forward links. Essentially, improved ODS is the difference between the time when the first BS starts transmitting its signal on the forward link and the time when the second BS starts transmitting its signal on the forward link. This improved ODS estimate can be calculated using: (1) the local time of reception and transmission of signals in the reverse and forward links in certain BSs, measured in each of the corresponding BSs and (2) the difference in airspace in the MS of the signals of the forward link from the BS, messages about which are transmitted by the mobile station. This improved ODS information can then be used by other mobile stations to determine location.
В предпочтительном варианте осуществления улучшенные оценки ОРВ сохраняют в таблице базы данных в КБС или в центре коммутации мобильных станций (ЦКМ). Затем, желательно определение положения для второй МС (систематически, по наступлении некоторого события или по запросу от КБС или МС). Вторая МС измеряет разности во времени между БС на основании времени приема во второй МС сигнала прямой линии связи от каждой БС и сообщает об измеренных разностях во времени в КБС. КБС затем сравнивает сохраненную улучшенную оценку ОРВ между конкретной парой БС с измеренной разностью во времени между той же самой парой БС, сообщение о которой передала МС. На основании этого сравнения могут быть вычислены задержки распространения между каждой из нескольких БС и МС, и может быть осуществлено точное определение местоположения МС. Измерения ВП или РВП вновь могут быть использованы для определения местоположения. Независимо от того, какой используется способ определения местоположения, однако вычисления определения местоположения, по существу, полагаются на наличие задержек распространения в окружающей среде мобильной станции.In a preferred embodiment, improved ODS estimates are stored in a database table in the BSC or in a mobile switching center (MSC). Then, it is desirable to determine the position for the second MS (systematically, upon the occurrence of an event or upon request from the BSC or MS). The second MS measures the time differences between the BSs based on the reception time in the second MS of the forward link signal from each BS and reports the measured time differences in the BSC. The BSC then compares the stored improved ODS score between the particular BS pair with the measured time difference between the same BS pair that the MS reported. Based on this comparison, propagation delays between each of several BSs and MSs can be calculated, and accurate location of the MSs can be made. The measurements of the airspace or the airspace can again be used to determine the location. Regardless of the location method used, however, location calculations essentially rely on the presence of propagation delays in the environment of the mobile station.
Вообще, определение каждой оценки ОРВ в МС включает только две БС, даже если может иметь место трехсторонняя процедура ГПК (то есть с использованием трех различных БС). Повторяя определение ОРВ в течение множества различных процедур ГПК, может быть определена улучшенная оценка ОРВ между значительным количеством возможных пар БС. Улучшенные оценки ОРВ затем обычно используют другими МС (то есть, МС, которые не участвовали в вычислениях оценок ОРВ) для определения положения этих других МС. Очевидно, однако, что положение МС, которая участвовала в вычислениях оценок ОРВ, может также быть определено с использованием улучшенных оценок ОРВ. В любом случае, процедура определения местоположения предпочтительно использует столько БС, сколько возможно, чтобы увеличить точность оценки местоположения.In general, the definition of each ODS score in an MS includes only two BSs, even if a tripartite GPC procedure can take place (that is, using three different BSs). By repeating the determination of ODS over many different GPC procedures, an improved ODS score can be determined between a significant number of possible BS pairs. Improved ODS estimates are then commonly used by other MSs (i.e., MSs that did not participate in the calculations of the ODS estimates) to determine the position of these other MSs. It is obvious, however, that the position of the MS that participated in the calculation of the ODS estimates can also be determined using improved ODS estimates. In any case, the positioning procedure preferably uses as many BSs as possible to increase the accuracy of the location estimate.
На фиг.3 схематически изображена МС, которая находится в состоянии ГПК или собирается его осуществить. Первая базовая станция БС1 передает кадр сигнала 302 по прямой линии связи (или кадр пилот-сигнала или кадр данных графика) в момент времени Тt1, который измеряется в системе отсчета времени первой базовой станции БС1. Сигнал 304 обратной линии связи от мобильной станции МС1 принимает первая базовая станция БС1 в момент времени Tr1, также измеренный в системе отсчета времени первой базовой станции БС1. Точно так же вторая базовая станция БС2 передает сигнал 306 по прямой линии связи в момент времени Tt2, и принимает сигнал 304 обратной линии связи от мобильной станции МС1 в момент времени Тr2, измеренный в системе отсчета времени второй базовой станции БС2. В общем случае система отсчета времени этих двух базовых станций в асинхронной сети будет иметь относительную разность во времени (ОРВ) Δ. Другими словами, если событие (такое как передача кадра пилот-сигнала) происходит в момент времени T1 в первой базовой станции БС1, соответствующее событие будет иметь место в момент времениFigure 3 schematically shows the MS, which is in the state of the CCP or is going to implement it. The first base station BS1 transmits a

во второй базовой станции БС2. Как только ОРВ Δ известна, она может быть использована другими МС для определения местоположения мобильной станции.in the second base station BS2. Once ODS Δ is known, it can be used by other MSs to determine the location of the mobile station.
Кроме того, каждый сигнал в прямой линии связи имеет смещение ti относительно времени передачи кадра канала пилот-сигнала. Таким образом, данные канала графика от первой базовой станции БС1 передают в момент времениIn addition, each signal in the forward link has an offset ti relative to the transmission time of the pilot channel frame. Thus, the channel data of the graph from the first base station BS1 is transmitted at a time

где Tp1 является временем передачи кадра пилот-канала от первой базовой станции БС1. Точно так же данные канала графика сигнала в прямом канале связи от БС2 передают в момент времениwhere Tp1 is the transmission time of the pilot channel frame from the first base station BS1. In the same way, the data of the channel of the signal graph in the forward communication channel from BS2 is transmitted at a time

Когда инициализирована процедура ГПК, мобильная станция МС1 просто прослушивает пилот-сигнал и t2=0. Позже, когда мобильная станция МС1 находится в состоянии ГПК, вторая базовая станция БС2 будет передавать данные, и смещение t2 сигналов будет настроено так, чтобы данные от первой базовой станции БС1 и второй базовой станции БС2 достигли мобильной станции приблизительно в одно и то же время. В нижеследующем описании может быть рассмотрен общий сценарий, в котором предполагается, что смещения t1 и t2 известны. Этот сценарий охватывает оба случая инициализации ГПК и уже установления ГПК.When the GPC procedure is initialized, the mobile station MC1 simply listens for the pilot signal and t2 = 0. Later, when the mobile station MS1 is in the GPC state, the second base station BS2 will transmit data, and the offset t2 of the signals will be adjusted so that the data from the first base station BS1 and the second base station BS2 reach the mobile station at approximately the same time . In the following description, a general scenario may be considered in which it is assumed that the offsets t1 and t2 are known. This scenario covers both cases of GIC initialization and already establishing GIC.
На фиг.4 изображена диаграмма относительного хронирования различных сигналов ГПК, которые передаются и принимаются в системе, изображенной на фиг.3. Время на чертеже показано в обычной произвольной системе отсчета времени для вычисления ОРВ в соответствии с настоящим изобретением, однако время каждого события определяется в локальной системе отсчета времени станции (то есть, МС или ВС), связанной с этим событием.Figure 4 shows a diagram of the relative timing of the various signals of the CCP, which are transmitted and received in the system shown in figure 3. The time in the drawing is shown in a conventional arbitrary time frame for calculating ODS in accordance with the present invention, however, the time of each event is determined in the local time frame of the station (i.e., MS or BC) associated with this event.
В момент времени Tt1, измеренный в системе отсчета времени первой базовой станции БС1, кадр 402 пилот-сигнала или графика передается первой базовой станцией БС1. Кадр 402 принимается в мобильной станции МС1 в момент времени Tmr1, который измеряется в системе отсчета времени мобильной станции МС1. Момент времени Tmr1 задержан относительно времени передачи Tt1 на время задержки распространения

и сигнал 404 обратной линии связи принимают в первой базовой станции БС1 в момент времениand the

Сигнал 404 обратной линии связи от мобильной станции МС1 принимают во второй базовой станции БС2 в момент времени Тr2, и является задержанным относительно времени передачи Tmt на время задержки распространения τ2.The reverse link signal 404 from the mobile station MS1 is received at the second base station BS2 at time Tr2 , and is delayed relative to the transmission time Tmt by the propagation delay time τ2 .
Вторая базовая станция БС2 также передает кадр 406 графика или пилот-сигнала в момент времени Tt2. По истечении времени задержки распространения τ2 сигнал 404 прямой линии связи принимают мобильной станцией МС1 в момент времени Tmr2.The second base station BS2 also transmits a
Чтобы вычислить ОРВ Δ, мобильная станция МС1 передает сообщение о разности во времени tdiff между временем приема Tmr2 сигнала 406 прямой линии связи от второй базовой станции БС2 и временем передачи Тmt. сигнала 404 обратной линии связи от мобильной станции МС1. Таким образом,In order to calculate the ODS Δ, the mobile station MS1 transmits a message about the time difference tdiff between the reception time Tmr2 of the forward link signal 406 from the second base station BS2 and the transmission time Tmt . reverse link signal 404 from mobile station MS1. Thus,

Следует заметить, что на фиг.4 разность времени tdiff относительно велика, что обычно показательно для начального захвата.It should be noted that in Fig. 4, the time difference tdiff is relatively large, which is usually indicative of the initial capture.
С использованием вышеуказанных обозначений выражение для времени приема Тr2 сигнала обратной линии связи во второй базовой станции БС2 имеет вид:Using the above notation, the expression for the reception time Tr2 of the reverse link signal in the second base station BS2 has the form:

а выражение для tdiff можно записать в виде:and the expression for tdiff can be written as:

путем вычитания времени прихода Tmr2 сигнала 406 прямой линии связи от второй базовой станции БС2 (кадр пилот-сигнала при инициализации ГПК или данные графика при осуществлении ГПК) из времени передачи Tmt сигнала 404 обратной линии связи от мобильной станции МС1, причем время измеряется в системе отсчета времени второй базовой станции БС2. Таким образом, в системе отсчета времени второй базовой станции:by subtracting the arrival time Tmr2 of the forward link signal 406 from the second base station BS2 (pilot frame when initializing the GPC or graph data when performing the GPC) from the transmission time Tmt of the reverse link signal 404 from the mobile station MC1, the time being measured in time reference system of the second base station BS2. Thus, in the time reference system of the second base station:


Следовательно, имеются три уравнения: (5), (7) и (8) и три неизвестных: 1) время задержки распространения τ1 между мобильной станцией МС1 и первой базовой станцией БС1; 2) время задержки распространения τ2 между мобильной станцией МС1 и второй базовой станцией БС2 и 3) разность во времени и между первой базовой станцией БС1 и второй базовой станцией БС2. Решая относительно Δ, можно получитьTherefore, there are three equations: (5), (7) and (8) and three unknowns: 1) propagation delay time τ1 between the mobile station MS1 and the first base station BS1; 2) the propagation delay time τ2 between the mobile station MS1 and the second base station BS2 and 3) the time difference between the first base station BS1 and the second base station BS2. Solving for Δ, we can obtain

что дает решение требуемой ОРВ Δ между базовыми станциями БС1 & БС2.which provides a solution to the required ODS Δ between the base stations BS1 & BS2.
Согласно предпочтительному варианту осуществления изобретения мобильная станция МС1 передает сообщение о разности во времени tdiff, и каждая из базовых станций БС1 & БС2 передает сообщение о своих соответствующих временах передачи и приема в сеть. Вычисление ОРВ Δ затем осуществляются в КБС или КМС. Альтернативно, вычисление может быть выполнено в мобильной станции МС1 или в базовой станции, как только предоставляются необходимые данные синхронизации.According to a preferred embodiment of the invention, the mobile station MC1 transmits a time difference tdiff message, and each of the base stations BS1 & BS2 transmits a message of its respective transmission and reception times to the network. The calculation of ODS Δ is then carried out in the BSC or CCM. Alternatively, the calculation may be performed at the mobile station MC1 or at the base station as soon as the necessary synchronization data is provided.
Путем вычисления улучшенных оценок ОРВ между различными парами БС в асинхронной мобильной системе связи, решение для сигналов в восходящем направлении или решение для сигналов в нисходящем направлении может быть использовано для определения положения МС в системе без необходимости в абсолютной системе отсчета времени. Например, фиг.5 изображает последовательность операций, которая иллюстрирует возможный способ 500 обеспечения синхронизации станций БС и определения положения выбранной МС в асинхронной мобильной системе связи МДКРК в соответствии с одним из вариантов осуществления настоящего изобретения. Как очевидно для специалистов, многочисленны другие способы определения местоположения, такие как с использованием ВП или РВП, также могут применяться совместно со способом, основанным на использовании улучшенной оценки ОРВ, чтобы облегчить определение местоположения в соответствии с изобретением. На этапе 504 КБС вычисляет множество улучшенных оценок ОРВ между различными парами БС, которые находятся под управлением КБС или которые внесены в список соседних ячеек. Это вычисление осуществляют, используя данные, предоставляемые другими МС в мобильной системе связи. Соответственно, принимают во внимание влияние задержек распространения, чтобы вычислить оценки ОРВ с высокой точностью. Предпочтительно, таблицу этих улучшенных оценок ОРВ поддерживают в базе данных в КБС. На этапе 506 выбранная МС управляет БС в соседних ячейках. Для целей настоящего способа 500 определения местоположения, это включает в себя контроль, например, известной последовательности, которую периодически передают БС. Эта процедура контроля может включать в себя обычный контроль БС для (поиска) потенциальных кандидатов на переключение каналов связи. Следует отметить, что контроль известной последовательности от БС может обычно выполняться даже в случаях, когда ограниченная "слышимость" препятствует осуществлению процедуры ГПК с этой БС.By computing improved ODS estimates between different BS pairs in an asynchronous mobile communication system, a solution for signals in the upstream direction or a solution for signals in the downstream direction can be used to determine the position of the MS in the system without the need for an absolute time frame. For example, FIG. 5 is a flowchart that illustrates a
На этапе 508 МС измеряет ВП сигналов прямой линии связи, переданных несколькими различными БС. Каждое измерение ВП может быть осуществлено в системе отсчета времени МС или в качестве относительного значения по отношению к исходной БС или к некоторой другой БС. Измерения ВП временно сохраняют в локальной памяти вместе с информацией, идентифицирующей БС, которая соответствует каждому измерению ВП. Эти данные затем посылают к КБС для дальнейшей обработки. Измерения на этапе 508 могут быть осуществлены над данными канала пилот-сигнала или данными канала графика. Поскольку в БС обычно известно смещение ti, то разности во времени между БС (то есть, разность во времени между передачами кадра пилот-сигнала БС) известны, даже когда используют канал графика. На этапе 510 БС уточняет измерения ВП с учетом ОРВ между различными БС, суммируя оценки ОРВ с измерениями ВП. На этапе 512 время задержки распространения рассчитывают для каждого сигнала прямой линии связи, используя уточненные результаты измерения ВП, и на этапе 514 оценивают местоположение МС, используя вычисленные времена задержки распространения. Информация о местоположении может быть затем, например, передана к МС, сохранена в КБС или послана в регистр исходного местоположения (РИМ). В альтернативном варианте осуществления вычисления на этапах 510, 512 и 514 могут быть также осуществлены в процессоре МС, КМС или некоторого другого узла в сети.At 508, the MS measures the airspace of the forward link signals transmitted by several different BSs. Each VP measurement can be carried out in the MS time frame or as a relative value with respect to the initial BS or some other BS. VP measurements are temporarily stored in local memory along with information identifying the BS that corresponds to each VP measurement. This data is then sent to the BSC for further processing. Measurements at 508 may be performed on pilot channel data or graph channel data. Since the bias ti is usually known in the BS, the time differences between the BSs (that is, the time difference between the BS pilot frame transmissions) are known even when the graph channel is used. At
Способ 500, проиллюстрированный фиг.5, обеспечивает оценки определения местоположения на основании измерений, сделанных в МС для ВП сигнала прямой линии связи. В другом альтернативном варианте осуществления определение местоположения мобильной станции осуществляют, используя сигнал обратной линии связи. Решение для сигналов обратной линии связи является, по существу, тем же, что и решение для сигналов прямой линии связи за исключением того, что вместо измерения ВП сигналов прямой линии связи на этапе 508, измерения ВП осуществляют в множестве БС над сигналом обратной линии связи, который передан станцией МС. Эти измерения для сигнала обратной линии связи затем подают в КБС или КМС и уточняют измерения ВП и рассчитывают времена задержки распространения, как на этапах 510 и 512 решения для способа 500 при передаче в прямой линии связи.The
Как описано выше применительно к стандартным оценкам ОРВ, неопределенность в улучшенных оценках ОРВ также увеличится со временем, если таблица оценок ОРВ для конкретной БС не обновляется. Для цели определения местоположения, однако, требуемая точность оценок ОРВ является намного большей, чем в случае поиска ячейки. Таким образом, улучшенные оценки ОРВ, полученные во время ГПК, должны быть в достаточной мере обновленными, чтобы сигналы синхронизации в ЕС не испытывали дрейфа по сравнению друг с другом. Иначе будет трудно и даже невозможно, выполнить точные определения местоположения мобильной станции. Многие из способов, описанных выше для описания проблемы неопределенности в контексте стандартной оценки ОРВ, могут использоваться аналогичным образом, чтобы описать неопределенность в контексте улучшенной оценки ОРВ.As described above for standard ODS estimates, the uncertainty in improved ODS estimates will also increase over time if the ODS rating table for a particular BS is not updated. For the purpose of positioning, however, the required accuracy of the ODS estimates is much greater than in the case of a cell search. Thus, the improved ODS estimates obtained during the GPC must be sufficiently updated so that the synchronization signals in the EU do not drift compared to each other. Otherwise, it will be difficult and even impossible to perform accurate location determination of the mobile station. Many of the methods described above to describe the uncertainty problem in the context of a standard ODS estimate can be used in a similar way to describe the uncertainty in the context of an improved ODS estimate.
Способ получения улучшенной оценки ОРВ также может использоваться для дальнейшего совершенствования процесса поиска ячейки, описанного со ссылками на фиг.1 и 2. В одном из предпочтительных вариантов осуществления способа 100 поиска ячейки (см. фиг.1) разность во времени, сообщенная МС при ГПК, используется непосредственно для вычисления оценки ОРВ; никакой информации от БС не требуется. Таким образом, (см. фиг.4), стандартная оценка ОРВ равна времени приема Tmr1 в МС сигнала прямой линии связи от первой базовой станции БС1, вычтенному из времени приема Тmr2 в МС сигнала прямой линии связи от второй базовой станции БС2. На фиг.4 это значение показано разностью во времени tdiff. Непосредственное использование разности во времени, сообщение о которой передано МС, обеспечивает существенное уточнение по сравнению с известными процедурами поиска ячейки и в большинстве случаев значительно снижает сложность процесса поиска ячейки, позволяя преодолеть проблемы, имеющиеся в других возможных способах определения местоположения.The method of obtaining an improved estimate of ODS can also be used to further improve the cell search process described with reference to FIGS. 1 and 2. In one of the preferred embodiments of the cell search method 100 (see FIG. 1), the time difference reported by MS during GPC used directly to calculate the ODS score; no information is required from the BS. Therefore, (see FIG. 4), the standard evaluation ODS is reception time Tmr1 MS in the downlink signal from the first base station BS1, subtracted from the reception time Tmr2 in CM signal link direct from the second base station BS2. 4, this value is shown by the time difference tdiff . The direct use of the time difference, the message of which was transmitted by the MS, provides significant refinement compared with the known cell search procedures and in most cases significantly reduces the complexity of the cell search process, allowing you to overcome the problems that exist in other possible methods of determining the location.
Если, однако, требуется большая точность, неопределенность синхронизации в МС, которые осуществляют поиск для осуществления ГПК, может быть дополнительно снижена до пятидесяти процентов при использовании улучшенной оценки ОРВ, что требует принятия во внимание задержек распространения. Используя улучшенные оценки ОРВ, набор времен задержки, которые МС должна определить на длине поиска ячейки, значительно уменьшается, особенно по сравнению с известными способами поиска ячейки. Интервал неопределенности поиска ячейки будет тогда зависеть от размера ячейки и степени деления ячейки на сектора. Например, в системе, с неразделенными на сектора ячейками, имеющей радиус зоны ячейки приблизительно 30 километров, неопределенность составляет менее 300 микросекунд, с учетом того, что положение мобильной станции может быть оценено в пределах радиусов 3 ячеек. Окно нормального поиска для известных способов поиска ячейки, напротив, составляет приблизительно 10 миллисекунд. Таким образом, использование улучшенной оценки ОРВ обеспечивает уточнение на два порядка сложности поиска. Результаты еще лучше в сотовых системах связи с меньшими ячейками или с разделенными на сектора ячейками. Также возможно дополнительно уменьшить интервал неопределенности для поиска ячейки, оценивая задержку прямого и обратного распространения между целевой ЕС и мобильной станцией, которая выполняет поиск ячейки, особенно в случае с разделенными на сектора ячейками. Оценка задержки на распространение в прямом и обратном направлениях может быть легко вычислена, исходя из данных, доступных при осуществлении вычислений ОРВ или если известно приблизительное местоположение мобильных станций.If, however, greater accuracy is required, the synchronization uncertainty in the MSs that search for GPC can be further reduced to fifty percent using an improved ODS estimate, which requires consideration of propagation delays. Using improved ODS estimates, the set of delay times that the MS should determine over the cell search length is significantly reduced, especially compared to the known cell search methods. The cell search uncertainty interval will then depend on the size of the cell and the degree of division of the cell into sectors. For example, in a system with non-sectorized cells having a cell zone radius of approximately 30 kilometers, the uncertainty is less than 300 microseconds, given that the position of the mobile station can be estimated within the radius of 3 cells. The normal search window for known cell search methods, in contrast, is about 10 milliseconds. Thus, the use of an improved ODS rating provides refinement on two orders of magnitude of search complexity. The results are even better in cellular communication systems with smaller cells or sectorized cells. It is also possible to further reduce the uncertainty interval for cell search by estimating the forward and backward propagation delay between the target EU and the mobile station that performs the cell search, especially in the case of sectorized cells. The estimate of the propagation delay in the forward and reverse directions can be easily calculated based on the data available when performing ODS calculations or if the approximate location of the mobile stations is known.
Хотя несколько предпочтительных вариантов осуществления способа и устройства настоящего изобретения были проиллюстрированы на чертежах и описаны в вышеприведенном подробном описании, понятно, что изобретение не ограничено раскрытыми вариантами осуществления. Например, измерения относительной синхронизации станций БС, осуществленные в соответствии с настоящим изобретением, также могут быть использованы для псевдо-синхронизации станций БС. Таким образом, изобретение допускает многочисленные изменения, модификации и замены без изменения объема и сущности изобретения, которые сформулированы и определены в нижеследующей формуле изобретения.Although several preferred embodiments of the method and apparatus of the present invention have been illustrated in the drawings and described in the above detailed description, it is understood that the invention is not limited to the disclosed embodiments. For example, measurements of the relative synchronization of BS stations made in accordance with the present invention can also be used to pseudo-synchronize BS stations. Thus, the invention allows numerous changes, modifications and substitutions without changing the scope and essence of the invention, which are formulated and defined in the following claims.
Claims (48)
Translated fromRussianApplications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US7449498P | 1998-02-12 | 1998-02-12 | |
| US60/074,494 | 1998-02-12 | ||
| US09/243,095 | 1999-02-02 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2000123436A RU2000123436A (en) | 2002-09-10 |
| RU2241312C2true RU2241312C2 (en) | 2004-11-27 |
Family
ID=22119850
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2000123436/09ARU2241312C2 (en) | 1998-02-12 | 1999-02-09 | System and method for timing base stations in asynchronous code-division multiple access mobile communication system |
Country Status (4)
| Country | Link |
|---|---|
| MY (1) | MY129476A (en) |
| RU (1) | RU2241312C2 (en) |
| TW (1) | TW421941B (en) |
| ZA (1) | ZA991059B (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2379847C2 (en)* | 2005-03-10 | 2010-01-20 | Квэлкомм Инкорпорейтед | Timing synchronisation and channel estimation when switching between local and global signal waveforms using assigned tdm pilot signal |
| RU2425460C2 (en)* | 2006-10-26 | 2011-07-27 | Квэлкомм Инкорпорейтед | Method and device for estimating symbol synchronisation in wireless communication system |
| RU2609892C2 (en)* | 2012-04-20 | 2017-02-07 | Панасоник Корпорэйшн | Base station device, communication system and method of synchronization |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE60117522T2 (en) | 2000-04-07 | 2006-10-12 | Interdigital Technology Corp., Wilmington | Method for synchronizing a base station for wireless communication systems |
| US6826244B2 (en) | 2001-02-27 | 2004-11-30 | Interdigital Technology Corporation | Initial cell search algorithm for 3G FDD wireless communication systems |
| US7813311B2 (en) | 2002-02-05 | 2010-10-12 | Interdigital Technology Corporation | Method and apparatus for synchronizing base stations |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0241565A1 (en)* | 1986-04-11 | 1987-10-21 | ANT Nachrichtentechnik GmbH | Method for determining the sojourn cell of a mobile station in a mobile radio network |
| EP0335846A1 (en)* | 1988-02-29 | 1989-10-04 | Telefonaktiebolaget L M Ericsson | Cellular digital mobile radio system with plural base station transmitters, and method of transmitting information in such a system |
| US5223029A (en)* | 1988-08-10 | 1993-06-29 | Nitta Gelatin Inc. | Hardening material for medical and dental use |
| WO1994030024A1 (en)* | 1993-06-14 | 1994-12-22 | Telefonaktiebolaget Lm Ericsson | Time alignment of transmission in a down-link of a cdma system |
| US5440561A (en)* | 1991-09-30 | 1995-08-08 | Motorola, Inc. | Method for establishing frame synchronization within a TDMA communication system |
| WO1997047148A2 (en)* | 1996-06-06 | 1997-12-11 | Qualcomm Incorporated | Using a signal with increased power for determining the position of a mobile subscriber in a cdma cellular telephone system |
| RU2104615C1 (en)* | 1990-12-17 | 1998-02-10 | Эриксон-Джи-И Мобил Коммьюникейшн Холдинг Инк. | Method and system for multiple-channel access and message extension spectrum for information exchange between multiple stations using encoded share of extension spectrum communication signals |
- 1999
- 1999-02-09RURU2000123436/09Apatent/RU2241312C2/enactive
- 1999-02-10ZAZA9901059Apatent/ZA991059B/enunknown
- 1999-02-11MYMYPI9900474patent/MY129476A/enunknown
- 1999-03-02TWTW88101797Apatent/TW421941B/ennot_activeIP Right Cessation
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0241565A1 (en)* | 1986-04-11 | 1987-10-21 | ANT Nachrichtentechnik GmbH | Method for determining the sojourn cell of a mobile station in a mobile radio network |
| EP0335846A1 (en)* | 1988-02-29 | 1989-10-04 | Telefonaktiebolaget L M Ericsson | Cellular digital mobile radio system with plural base station transmitters, and method of transmitting information in such a system |
| US5223029A (en)* | 1988-08-10 | 1993-06-29 | Nitta Gelatin Inc. | Hardening material for medical and dental use |
| RU2104615C1 (en)* | 1990-12-17 | 1998-02-10 | Эриксон-Джи-И Мобил Коммьюникейшн Холдинг Инк. | Method and system for multiple-channel access and message extension spectrum for information exchange between multiple stations using encoded share of extension spectrum communication signals |
| US5440561A (en)* | 1991-09-30 | 1995-08-08 | Motorola, Inc. | Method for establishing frame synchronization within a TDMA communication system |
| WO1994030024A1 (en)* | 1993-06-14 | 1994-12-22 | Telefonaktiebolaget Lm Ericsson | Time alignment of transmission in a down-link of a cdma system |
| WO1997047148A2 (en)* | 1996-06-06 | 1997-12-11 | Qualcomm Incorporated | Using a signal with increased power for determining the position of a mobile subscriber in a cdma cellular telephone system |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2379847C2 (en)* | 2005-03-10 | 2010-01-20 | Квэлкомм Инкорпорейтед | Timing synchronisation and channel estimation when switching between local and global signal waveforms using assigned tdm pilot signal |
| RU2425460C2 (en)* | 2006-10-26 | 2011-07-27 | Квэлкомм Инкорпорейтед | Method and device for estimating symbol synchronisation in wireless communication system |
| US8045631B2 (en) | 2006-10-26 | 2011-10-25 | Qualcomm, Incorporated | Method and apparatus for packet detection in wireless communication system |
| US8107561B2 (en) | 2006-10-26 | 2012-01-31 | Qualcomm Incorporated | Method and apparatus for carrier frequency offset estimation and frame synchronization in a wireless communication system |
| RU2609892C2 (en)* | 2012-04-20 | 2017-02-07 | Панасоник Корпорэйшн | Base station device, communication system and method of synchronization |
Also Published As
| Publication number | Publication date |
|---|---|
| TW421941B (en) | 2001-02-11 |
| ZA991059B (en) | 1999-09-22 |
| MY129476A (en) | 2007-04-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CA2320996C (en) | Method and system for facilitating timing of base stations in an asynchronous cdma mobile communications system | |
| JP4549603B2 (en) | System and method for mobile station location measurement in a CDMA cellular system | |
| US5970414A (en) | Method for estimating a mobile-telephone's location | |
| US6542743B1 (en) | Method and apparatus for reducing pilot search times utilizing mobile station location information | |
| JP4482645B2 (en) | Method and apparatus for performing wireless communication system synchronization | |
| EP1095469B1 (en) | Method and apparatus for providing a time adjustment to a wireless communication system | |
| US6982971B2 (en) | Method and system for handoff between an asychronous CDMA base station and a synchronous CDMA base station | |
| EP1325348A1 (en) | Mobile radio terminal and related method and system | |
| RU2241312C2 (en) | System and method for timing base stations in asynchronous code-division multiple access mobile communication system | |
| CA2603277C (en) | Method and system for facilitating timing of base stations in an asynchronous cdma mobile communications system | |
| EP1742386B1 (en) | Method and system for facilitating timing of base stations in an asynchronous CDMA mobile communications system | |
| MXPA00007813A (en) | Method and system for facilitating timing of base stations in an asynchronous cdma mobile communications system | |
| KR0175613B1 (en) | Inter-base station synchronization method using pilot signal in code division multiple access system | |
| HK1073188A (en) | Method and apparatus for reducing pilot search times utilizing mobile station location information |