KR20220168240A - Smart navigation system for guiding the best route around pedestrian disability - Google Patents
Smart navigation system for guiding the best route around pedestrian disabilityDownload PDFInfo
- Publication number
- KR20220168240A KR20220168240AKR1020210077655AKR20210077655AKR20220168240AKR 20220168240 AKR20220168240 AKR 20220168240AKR 1020210077655 AKR1020210077655 AKR 1020210077655AKR 20210077655 AKR20210077655 AKR 20210077655AKR 20220168240 AKR20220168240 AKR 20220168240A
- Authority
- KR
- South Korea
- Prior art keywords
- information
- optimal
- unit
- user
- movement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Classifications
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H3/00—Appliances for aiding patients or disabled persons to walk about
- A61H3/06—Walking aids for blind persons
- A61H3/061—Walking aids for blind persons with electronic detecting or guiding means
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F9/00—Methods or devices for treatment of the eyes; Devices for putting in contact-lenses; Devices to correct squinting; Apparatus to guide the blind; Protective devices for the eyes, carried on the body or in the hand
- A61F9/08—Devices or methods enabling eye-patients to replace direct visual perception by another kind of perception
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S15/00—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems
- G01S15/02—Systems using the reflection or reradiation of acoustic waves, e.g. sonar systems using reflection of acoustic waves
- G01S15/06—Systems determining the position data of a target
- G01S15/08—Systems for measuring distance only
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/24—Acquisition or tracking or demodulation of signals transmitted by the system
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/16—Sound input; Sound output
- G06F3/167—Audio in a user interface, e.g. using voice commands for navigating, audio feedback
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q50/00—Information and communication technology [ICT] specially adapted for implementation of business processes of specific business sectors, e.g. utilities or tourism
- G06Q50/10—Services
- G06Q50/22—Social work or social welfare, e.g. community support activities or counselling services
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B21/00—Alarms responsive to a single specified undesired or abnormal condition and not otherwise provided for
- G08B21/18—Status alarms
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H20/00—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance
- G16H20/30—ICT specially adapted for therapies or health-improving plans, e.g. for handling prescriptions, for steering therapy or for monitoring patient compliance relating to physical therapies or activities, e.g. physiotherapy, acupressure or exercising
- G—PHYSICS
- G16—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR SPECIFIC APPLICATION FIELDS
- G16H—HEALTHCARE INFORMATICS, i.e. INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR THE HANDLING OR PROCESSING OF MEDICAL OR HEALTHCARE DATA
- G16H40/00—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices
- G16H40/60—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices for the operation of medical equipment or devices
- G16H40/67—ICT specially adapted for the management or administration of healthcare resources or facilities; ICT specially adapted for the management or operation of medical equipment or devices for the operation of medical equipment or devices for remote operation
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5007—Control means thereof computer controlled
- A61H2201/501—Control means thereof computer controlled connected to external computer devices or networks
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5023—Interfaces to the user
- A61H2201/5043—Displays
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5058—Sensors or detectors
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H2201/00—Characteristics of apparatus not provided for in the preceding codes
- A61H2201/50—Control means thereof
- A61H2201/5097—Control means thereof wireless
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Health & Medical Sciences (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Computer Networks & Wireless Communication (AREA)
- Theoretical Computer Science (AREA)
- Business, Economics & Management (AREA)
- Public Health (AREA)
- Multimedia (AREA)
- Life Sciences & Earth Sciences (AREA)
- Epidemiology (AREA)
- Biomedical Technology (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Primary Health Care (AREA)
- Physical Education & Sports Medicine (AREA)
- Signal Processing (AREA)
- Human Computer Interaction (AREA)
- Medical Informatics (AREA)
- Tourism & Hospitality (AREA)
- General Engineering & Computer Science (AREA)
- Rehabilitation Therapy (AREA)
- Audiology, Speech & Language Pathology (AREA)
- Pain & Pain Management (AREA)
- Vascular Medicine (AREA)
- General Business, Economics & Management (AREA)
- Acoustics & Sound (AREA)
- Ophthalmology & Optometry (AREA)
- Emergency Management (AREA)
- Heart & Thoracic Surgery (AREA)
- Strategic Management (AREA)
- Marketing (AREA)
- Human Resources & Organizations (AREA)
- Economics (AREA)
- Biophysics (AREA)
- Child & Adolescent Psychology (AREA)
- Navigation (AREA)
Abstract
Description
Translated fromKorean본 발명은 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션 시스템에 관한 것으로, 보조보행장치에 사용자단말을 구비하여, 중앙 서버에 저장되어 있는 빅데이터와 기상청 서버 및 공공 서버의 데이터를 종합하여 이동경로까지의 보행 장애인 맞춤 최적의 경로를 안내할 수 있는 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션 시스템에 관한 것이다.The present invention relates to a smart navigation system for guiding an optimal route centered on a walking handicapped person, which includes a user terminal in an assistive walking device and integrates big data stored in a central server and data of the Korea Meteorological Administration server and public server to provide a moving route The present invention relates to a smart navigation system for guiding an optimal route centered on a walking disabled person capable of guiding an optimal route customized for a person with a walking disability up to the present invention.
보행 장애인은 목적지로 이동에 있어, 보조보행장치인 휠체어나 전동휠체어를 통해 이동을 한다. 종래의 기술에는 한국등록특허 제 10-1648667호(전동휠체어)가 공개되어있다.When moving to a destination, a person with a walking disability moves through a wheelchair or an electric wheelchair, which is an auxiliary walking device. In the prior art, Korean Patent Registration No. 10-1648667 (electric wheelchair) has been disclosed.
하지만, 보조보행장치인 휠체어나 전동휠체어의 문제점은 목적지 이동 경로에 있어서 경사 및 험로, 장애물, 인파, 공사현장 같은 이동을 방해하는 요소들이다. 이 경우, 보행 장애인은 휠체어나 전동휠체어가 이동하기 적합한 길을 찾아 멀리 돌아가는 경우가 많다.However, the problems of wheelchairs or electric wheelchairs, which are auxiliary walking devices, are factors that hinder movement such as slopes and rough roads, obstacles, crowds, and construction sites in the destination travel path. In this case, there are many cases in which a person with a walking disability goes back far in search of a suitable path for a wheelchair or an electric wheelchair to move.
또한, 보행 장애인이 적합한 목적지 이동 경로를 파악하기란 쉽지가 않으며, 사회적 문제로도 야기될 수 있다.In addition, it is not easy for a person with a walking disability to find a suitable destination movement route, and it may also cause a social problem.
이러한 문제점을 해결하기 위해, 보조보행장치인 휠체어나 전동휠체어에 네비게이션이 구비되어 중앙 서버에서 목적지까지의 안전한 최적 경로데이터를 제공할 수 있는 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션 시스템이 필요한 실정이다.In order to solve this problem, a smart navigation system that guides the optimal route centered on the walking handicapped, which can provide safe optimal route data from the central server to the destination by providing a navigation device for a wheelchair or electric wheelchair, which is an assistive walking device, is needed. to be.
상기와 같은 문제를 해결하고자, 보행 장애인의 이동 수단인 보조보행장치에 구비된 네비게이션이 목적지 이동 경로에 있어, 경사 및 험로, 장애물, 인파, 공사현장 또는 날씨에 따른 안전한 최적의 경로 데이터를 산출하여 보행 장애인 중심의 최적 경로를 안내하는 네비게이션 시스템을 제공하는데 목적이 있다.In order to solve the above problems, the navigation provided in the assistive walking device, which is the means of movement of the disabled person, calculates safe and optimal route data according to slopes and rough roads, obstacles, crowds, construction sites, or weather in the destination movement route. An object of the present invention is to provide a navigation system for guiding an optimal path centered on the walking handicapped.
상기와 같은 과제를 해결하기 위한 본 발명의 제 1실시예에 따른 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션에 있어서, 사용자로부터 목적지에 따라 사용자 이동 정보를 입력 받고, 최적의 이동경로데이터에 따라 이동 경로를 안내하는 하나 이상의 사용자단말; 날짜, 요일 및 시간에 따른 날씨 정보를 제공하는 기상청 서버와 공사 현장이나 이동 경로에 따른 통제 상황의 공공 정보를 제공하는 공공API서버를 포함하는 외부정보서버 및 보조보행장치로부터 상기 거리 정보를 수집하여 생성된 빅데이터를 기반으로 상기 날씨 정보와 공공 정보를 이용하여 상기 사용자 이동 정보에 따라 상기 최적의 이동경로데이터를 생성하여 상기 사용자단말로 제공하는 중앙 서버를 포함하며, 상기 중앙 서버는, 다수의 보조보행장치로부터 거리 정보를 수집하여 생성된 빅데이터를 저장하고, 상기 사용자단말에서 제공 받은 상기 사용자 이동 정보를 저장하는 빅데이터저장부 및 상기 빅데이터를 기반으로 상기 날씨 정보와 상기 공공 정보를 이용하여 상기 사용자 이동 정보에 따라 상기 최적의 이동경로데이터를 산출하여 상기 사용자단말에 제공하는 최적경로산출부를 포함할 수 있다.In the smart navigation for guiding the optimal route centered on the walking disabled according to the first embodiment of the present invention for solving the above problems, user movement information is received from the user according to the destination, and according to the optimal movement route data One or more user terminals to guide the movement path; The distance information is collected from an external information server including a Meteorological Administration server that provides weather information according to date, day, and time and a public API server that provides public information on control situations along construction sites or moving routes and auxiliary walking devices. A central server generating the optimal movement route data according to the user movement information using the weather information and public information based on the generated big data and providing the data to the user terminal, wherein the central server comprises a plurality of A big data storage unit that stores big data generated by collecting distance information from assistive walking devices and stores the user movement information received from the user terminal, and uses the weather information and the public information based on the big data and an optimal route calculation unit for calculating the optimal movement route data according to the user movement information and providing the data to the user terminal.
또한, 상기 사용자단말은, 사용자 조작 또는 음성 인식으로 목적지를 설정하는 설정부; 상기 설정부를 통해 설정된 목적지 정보와 현재 위치 정보를 종합하여 상기 사용자 이동 정보를 상기 중앙 서버로 전송하는 GPS데이터부 및 상기 중앙 서버로부터 최적의 이동경로데이터를 수신 받아 이동경로를 음성안내 또는 화면으로 표시하는 디스플레이부를 포함할 수 있다.In addition, the user terminal, a setting unit for setting a destination by user manipulation or voice recognition; A GPS data unit that synthesizes the destination information and current location information set through the setting unit and transmits the user movement information to the central server, receives optimal movement route data from the central server, and displays the movement route via voice guidance or screen. It may include a display unit to.
또한, 상기 사용자단말은, 연동된 보조보행장치의 센서부로부터 거리 정보를 수신 받아 상기 중앙 서버에 전송하는 센서정보부를 포함하고, 상기 빅데이터저장부는, 상기 센서정보부의 상기 거리 정보를 전송 받아 저장된 빅데이터를 업데이트하는 것을 특징으로 할 수 있다.In addition, the user terminal includes a sensor information unit that receives distance information from the sensor unit of the interlocked walking aid and transmits it to the central server, and the big data storage unit receives and stores the distance information of the sensor information unit. It may be characterized by updating big data.
또한, 상기 센서부는, 거리의 경사 및 험로를 측정하는 지면측정부 및 초음파 센서, 레이더 센서 및 카메라 중 하나 이상이 구비되어, 거리의 특성을 파악하는 거리특성감지부를 포함할 수 있다.In addition, the sensor unit may include a ground measuring unit for measuring a slope and a rough road of the street, and a distance characteristic detecting unit for detecting the characteristics of the distance having at least one of an ultrasonic sensor, a radar sensor, and a camera.
또한, 상기 사용자단말은, 전동 보조보행장치와 연동될 경우, 제공 받은 상기 최적의 이동경로데이터에 따라 상기 전동 보조보행장치를 자율 주행하도록 하는 자율부행부를 더 포함할 수 있다.In addition, the user terminal, when interlocked with the powered walking device, may further include an autonomous vehicle for autonomously driving the powered walking device according to the optimal movement path data provided.
본 발명의 제 2실시예에 따른 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션 시스템의 상기 사용자단말은, 상기 최적의 이동경로데이터에 따라 이동 시, 충돌 또는 위치 변화 감지에 따라 위험으로 판단되면 상기 카메라를 통해 촬영이 이루어지도록 하여, 촬영이미지를 상기 중앙 서버 및 보호자단말 중 하나 이상에 전송하는 위험감지부를 더 포함 할 수 있다.When the user terminal of the smart navigation system for guiding an optimal route centered on a walking disabled person according to a second embodiment of the present invention moves according to the optimal movement route data, when it is determined to be dangerous according to a collision or position change detection, the user terminal A risk detection unit for transmitting the captured image to at least one of the central server and the guardian terminal may be further included so that the photographing is performed through the camera.
또한, 상기 사용자단말은, 상기 보조보행장치를 제어하는 보행장치제어부를 더 포함하고, 상기 보행장치제어부는, 상기 중앙 서버에서 제공 받은 날씨 정보에 따라, 상기 보조보행장치 좌석프레임의 열선을 제어하는 열선관리부 및 상기 중앙 서버에서 제공 받은 상기 최적의 이동경로데이터에 따라 상기 보조보행장치 좌석프레임의 각도를 제어하는 각도조절부를 포함할 수 있다.In addition, the user terminal further includes a walking device control unit that controls the auxiliary walking device, and the walking device control unit controls a heating wire of the seat frame of the auxiliary walking device according to weather information provided from the central server. An angle adjusting unit may be included to control an angle of the seat frame of the assistive walking device according to the optimal movement route data provided from the heating wire management unit and the central server.
또한, 상기 중앙 서버는, 대중교통의 대중교통정보를 제공하는 대중교통부를 더 포함하고, 상기 대중교통서버는, 상기 최적경로산출부에서 제공받은 상기 최적의 이동경로데이터에 따라서 이용 가능한 장애인 전용 대중교통수단의 대중교통정보를 종합하여 상기 사용자단말에 전송하는 것을 특징으로 할 수 있다.In addition, the central server further includes a public transportation unit that provides public transportation information on public transportation, and the public transportation server, according to the optimal movement route data provided by the optimal route calculation unit, provides public transportation for the disabled. It may be characterized in that public transportation information of means of transportation is synthesized and transmitted to the user terminal.
상기와 같은 본 발명의 실시예에 따른 보행 장애인 중심의 최적 경로를 안내하는 네비게이션 시스템은, 거리 정보의 수집을 통해 빅데이터가 저장되어 있는 중앙 서버에서 보조보행장치가 원활히 이동할 수 있는 최적의 이동경로데이터를 사용자단말을 통해 제공 할 수 있다.The navigation system for guiding the optimal route centered on the walking disabled according to the embodiment of the present invention as described above is the optimal movement route through which the walking aid can move smoothly in the central server where big data is stored through the collection of distance information. Data may be provided through a user terminal.
또한, 최적의 이동경로데이터를 기반으로 보조보행장치가 전동휠체어로 구성될 경우, 자율 주행하도록 하도록 할 수 있다.In addition, when the auxiliary walking device is configured as an electric wheelchair based on the optimal movement path data, autonomous driving may be performed.
또한, 보조보행장치를 통해 최적의 이동경로데이터에 따라 이동될 시, 센서부로부터 거리 정보를 수집하여 중앙 서버에 전송하는 것으로, 저장되어 있는 빅데이터를 업데이트 할 수 있다. 이와 같이 거리 정보가 계속 축적됨에 따라 보다 최적화된 이동경로데이터를 제공할 수 있다In addition, when moving according to the optimal movement route data through the auxiliary walking device, the stored big data can be updated by collecting distance information from the sensor unit and transmitting it to the central server. In this way, as distance information continues to accumulate, more optimized movement route data can be provided.
또한, 보조보행장치가 전동휠체어로 구성될 경우, 최적의 이동경로데이터에 따라 좌석프레임이나 열선을 제어하여 보행장애인이 이동에 있어 편리함을 제공할 수 있다.In addition, when the auxiliary walking device is composed of a power wheelchair, it is possible to provide convenience in movement of a person with a walking disability by controlling a seat frame or heating wire according to optimal movement path data.
도 1은 본 발명의 제 1실시예에 따른 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션 시스템의 전체적인 구성을 보여주기 위한 구성도이다.
도 2는 도 1의 사용자단말의 구성을 나타낸 블록도이다.
도 3은 도 1의 보조보행장치에 구비되어 있는 센서부의 구성을 나타낸 블록도이다.
도 4는 도 3의 거리특성감지부의 구성을 보여주기 위한 블록도이다.
도 5는 도 1의 외부정보서버의 구성을 보여주기 위한 블록도이다.
도 6은 도 1의 중앙 서버의 구성을 보여주기 위한 블록도이다.
도 7은 도 6의 최적경로산출부가 이동 가능 구역 정보를 설명하기 위한 예시도이다.
도 8은 본 발명의 제 2실시예에 따른 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션 시스템의 사용자단말을 나타낸 블록도이다.
도 9는 도 7의 보행장치제어부의 구성을 보여주기 위한 블록도이다.
도 10은 본 발명의 제 2실시예에 따른 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션 시스템의 중앙 서버에 대중교통부가 더 포함되는 모습을 보여주기 위한 블록도이다.1 is a configuration diagram showing the overall configuration of a smart navigation system for guiding an optimal route centered on a walking handicapped person according to a first embodiment of the present invention.
Figure 2 is a block diagram showing the configuration of the user terminal of Figure 1.
Figure 3 is a block diagram showing the configuration of the sensor unit provided in the auxiliary walking device of Figure 1.
FIG. 4 is a block diagram illustrating the configuration of a distance characteristic detecting unit of FIG. 3 .
Figure 5 is a block diagram for showing the configuration of the external information server of Figure 1;
FIG. 6 is a block diagram illustrating the configuration of a central server of FIG. 1 .
FIG. 7 is an exemplary view for explaining information on a movable area by the optimum route calculation unit of FIG. 6 .
8 is a block diagram showing a user terminal of a smart navigation system for guiding an optimal path centered on a walking handicapped person according to a second embodiment of the present invention.
FIG. 9 is a block diagram illustrating the configuration of a walking device control unit of FIG. 7 .
FIG. 10 is a block diagram showing how the public transportation unit is further included in the central server of the smart navigation system for guiding the optimal route centered on the walking handicapped according to the second embodiment of the present invention.
이하, 도면을 참조한 본 발명의 설명은 특정한 실시 형태에 대해 한정되지 않으며, 다양한 변환을 가할 수 있고 여러 가지 실시예를 가질 수 있다. 또한, 이하에서 설명하는 내용은 본 발명의 사상 및 기술 범위에 포함되는 모든 변환, 균등물 내지 대체물을 포함하는 것으로 이해되어야 한다.Hereinafter, the description of the present invention with reference to the drawings is not limited to specific embodiments, and various transformations may be applied and various embodiments may be applied. In addition, the content described below should be understood to include all conversions, equivalents, or substitutes included in the spirit and scope of the present invention.
이하의 설명에서 제1, 제2 등의 용어는 다양한 구성요소들을 설명하는데 사용 되는 용어로서, 그 자체에 의미가 한정되지 아니하며, 하나의 구성요소를 다른 구성요소로부터 구별하는 목적으로만 사용된다.In the following description, terms such as first and second are terms used to describe various components, and are not limited in meaning to themselves, and are used only for the purpose of distinguishing one component from another.
본 명세서 전체 걸쳐 사용되는 동일한 참조 번호는 동일한 구성요소를 나타낸다.Like reference numbers used throughout this specification indicate like elements.
본 발명에서 사용되는 단수의 표현은 문맥상 명백하게 다르게 뜻하지 않는 한, 복수의 표현을 포함한다. 또한, 이하에서 기재되는 “포함하다”,”구비하다”또는 “가지다” 등의 용어는 명세서상에 기재된 특징, 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것들의 존재 또는 부가 가능성을 미리 배제하지 않는 것으로 이해되어야 한다.Singular expressions used in the present invention include plural expressions unless the context clearly dictates otherwise. In addition, terms such as “include,” “have,” or “have” described below indicate the presence or possibility of addition of features, numbers, steps, operations, components, parts, or combinations thereof described in the specification. It should be understood that it is not excluded in advance.
다르게 정의되지 않는 한, 기술적이거나 과학적인 용어를 포함해서 여기서 사용되는 모든 용어들은 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자에 의해 일반적으로 이해되는 것과 동일한 의미를 갖고 있다. 일반적으로 사용되는 사전에 정의되어 있는 것과 같은 용어들은 관련 기술의 문맥 상 갖는 의미와 일치하는 의미를 갖는 것으로 해석되어야 하며, 본 출원에서 명백하게 정의하지 않는 한, 이상적이거나 과도하게 형식적인 의미로 해석되지 않는다.Unless defined otherwise, all terms used herein, including technical or scientific terms, have the same meaning as commonly understood by one of ordinary skill in the art to which the present invention belongs. Terms such as those defined in commonly used dictionaries should be interpreted as having a meaning consistent with the meaning in the context of the related art, and unless explicitly defined in the present application, it should not be interpreted in an ideal or excessively formal meaning. don't
또한, 첨부 도면을 참조하여 설명함에 있어, 도면 부호에 관계없이 동일한 구성 요소는 동일한 참조 부호를 부여하고 이에 대한 중복되는 설명은 생략하기로 한다. 본 발명을 설명함에 있어서 관련된 공지 기술에 대한 구체적인 설명이 본 발명의 요지를 불필요하게 흐릴 수 있다고 판단되는 경우 그 상세한 설명을 생략한다.In addition, in the description with reference to the accompanying drawings, the same reference numerals are given to the same components regardless of reference numerals, and overlapping descriptions thereof will be omitted. In describing the present invention, if it is determined that a detailed description of related known technologies may unnecessarily obscure the subject matter of the present invention, the detailed description will be omitted.
이하, 본 발명의 실시 예를 첨부한 도 1 내지 도 10을 참조하여 상세히 설명하기로 한다.Hereinafter, an embodiment of the present invention will be described in detail with reference to FIGS. 1 to 10 attached.
도 1은 본 발명의 제 1실시예에 따른 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션 시스템의 전체적인 구성을 보여주기 위한 구성도이며, 도 2는 도 1의 사용자단말의 구성을 나타낸 블록도이며, 도 3은 도 1의 보조보행장치에 구비되어 있는 센서부의 구성을 나타낸 블록도이며, 도 4는 도 3의 거리특성감지부의 구성을 보여주기 위한 블록도이며, 도 5는 도 1의 외부정보서버의 구성을 보여주기 위한 블록도이며, 도 6은 도 1의 중앙 서버의 구성을 보여주기 위한 블록도이고, 도 7은 도 6의 최적경로산출부가 이동 가능 구역 정보를 설명하기 위한 예시도이다.1 is a configuration diagram showing the overall configuration of a smart navigation system for guiding an optimal route centered on a walking disabled person according to a first embodiment of the present invention, and FIG. 2 is a block diagram showing the configuration of a user terminal in FIG. 1. , FIG. 3 is a block diagram showing the configuration of the sensor unit provided in the auxiliary walking device of FIG. 1, FIG. 4 is a block diagram showing the configuration of the distance characteristic detection unit of FIG. 3, and FIG. 5 is the external information of FIG. Figure 6 is a block diagram showing the configuration of a server, Figure 6 is a block diagram showing the configuration of the central server of Figure 1, Figure 7 is an exemplary diagram for explaining the movable area information of the optimum route calculation unit of Figure 6 .
도 1 내지 도 6을 참조하면, 본 발명의 제 1실시예에 의한 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션 시스템은 사용자단말(100), 보조보행장치(200), 외부정보서버(300) 및 중앙 서버(400)를 포함할 수 있다.1 to 6, the smart navigation system for guiding the optimal route centered on the walking disabled according to the first embodiment of the present invention includes a
여기서, 사용자단말(100)은 하나 이상으로 구성될 수 있으며, 사용자로부터 목적지를 입력 받아 중앙 서버(400)로 제공되는 최적의 이동경로데이터를 통해 이동 경로를 안내할 수 있다.Here, the
즉, 사용자단말(100)은 목적지 정보와 현재 위치 정보를 중앙 서버(400)에 종합하여 사용자 이동 정보를 중앙 서버(400)에 전송하며, 최적의 이동경로데이터를 중앙 서버(400)로부터 수신 받아 사용자에게 음성 또는 화면으로 제공할 수 있다.That is, the
한편, 사용자단말(100)은 불특정 다수의 사용자가 소지하고 있는 단말일 수 있으며, 스마트폰, 태블릿, 네비게이션 등으로 구성될 수 있고, 본 발명의 시스템을 이용할 수 있는 어플리케이션이 다운로드 되어 있어, 하기와 같은 기능을 수행할 수 있으나, 이에 한정되지는 않는다.On the other hand, the
사용자단말(100)은 설정부(110), GPS데이터부(120), 디스플레이어부(130), 센서정보부(140), 자율주행부(150)를 포함할 수 있다.The
먼저, 설정부(110)는 사용자가 조작 또는 음성 인식으로 목적지의 정보를 설정하도록 할 수 있다.First, the
여기서, GPS데이터부(120)는 현재 위치 정보와 설정부(130)에서 설정된 목적지의 정보를 종합하여 사용자 이동 정보로 생성하며, 이에 따라 생성된 사용자 이동 정보는 중앙 서버(400)로 전송될 수 있다.Here, the GPS data unit 120 combines the current location information and the destination information set in the setting unit 130 to generate user movement information, and the user movement information generated accordingly can be transmitted to the
또한, 디스플레이어부(130)는 중앙 서버(400)에서 GPS데이터부(120)로 최적의 이동경로데이터를 수신 받아 음성 안내 또는 화면으로 표시되도록 할 수 있다.In addition, the display unit 130 may receive optimal movement route data from the
한편, 자율주행부(150)는 보조보행장치(200)가 전동휠체어로 구성될 시, GPS데이터부(120)에 수신 받은 최적의 이동경로데이터에 따라 보조보행장치(200)를 제어하여 자율 주행하도록 할 수 있다.On the other hand, when the
더욱 상세하게, 자율주행부(150)는 보조보행장치(200)가 전동휠체어로 구성되어, 카메라와 각종 센서들을 통한 딥러닝 기반의 엔진을 구비하여 보조보행장치(200)가 자율 주행하도록 할 수 있다.In more detail, the
또한, 원격 리모컨이나 어플리케이션 등으로 모터 등을 튜닝하여 보조보행장치(200)가 자율 주행할 수 있어 이에 한정하지 않는다.In addition, the
사용자단말(100)은 연동된 보조보행장치(200)의 센서부(210)로부터 거리 정보를 수신 받아 중앙 서버(400)에 전송할 수 있는 센서정보부(140)를 포함할 수 있다.The
센서정보부(140)는 센서부(210)로부터 수신 받은 거리 정보를 중앙 서버(400)로 전송하여, 중앙 서버(400)에 저장되어 있는 빅데이터가 업데이트되도록 할 수 있다.The sensor information unit 140 may transmit the distance information received from the
여기서, 거리 정보는 경사, 진동, 장애물, 인파의 정보 및 거리의 특성 중 하나 이상의 정보를 포함할 수 있으며, 거리의 특성은 위험도 등을 포함할 수 있으나, 이에 한정되지 않고, 거리의 다양한 정보들을 포함할 수 있다.Here, the distance information may include one or more of information about inclination, vibration, obstacles, crowd information, and distance characteristics. can include
보조보행장치(200)는 사용자단말(100)과 연동된 장치로서, 센서부(210)를 포함할 수 있다.The
센서부(210)는 보조보행장치(200)가 최적의 이동경로데이터에 따라 이동함에 거리 정보를 수집할 수 있고, 센서정보부(140)로 거리 정보를 전송할 수 있다.The
센서부(210)는 지면측정부(211), 거리특성감지부(212)를 포함할 수 있다.The
지면측정부(211)는 3축 가속도 센서가 구비되어 거리의 경사 및 진동을 측정할 수 있으며, 이에 한정하지 않고 거리의 경사 및 진동을 측정하기 용이한 센서로 구성될 수 있다.The ground measurement unit 211 is provided with a 3-axis acceleration sensor to measure the inclination and vibration of the distance, but is not limited thereto and may be configured with a sensor that can easily measure the inclination and vibration of the distance.
이 때, 지면측정부(211)의 설치 위치는 한정하지 않고, 보조보행장치(200)의 다양한 위치에 구비될 수 있다.At this time, the installation position of the ground measuring unit 211 is not limited, and may be provided in various positions of the
거리특성감지부(212)는 거리의 특성을 파악하는 것으로, 초음파 센서(212a), 레이더 센서(212b) 및 카메라(212c) 중 하나 이상이 구비될 수 있다.The distance
초음파 센서(212a)와 레이더 센서(212b)는 거리의 특성으로써, 장애물, 인파(유동인구) 및 지면의 험로(위험도) 등을 측정할 수 있다.The ultrasonic sensor 212a and the radar sensor 212b may measure obstacles, crowds (floating population), and rough roads (danger) as distance characteristics.
여기서, 카메라(212c)는 거리를 촬영하여, 촬영이미지를 통해 장애물, 인파(유동인구) 및 지면의 험로(위험도), 이동 가능한 폭 크기 등 거리의 특성을 파악하도록 할 수 있다.Here, the camera 212c may capture the street and identify characteristics of the street, such as obstacles, crowds (floating population), rough roads (danger), and movable width through the captured images.
또한, 카메라(212c)는 구비될 경우, 블랙박스로도 구성될 수 있어, 사용자가 최적의 이동경로데이터로 이동 시, 상황을 촬영하여 기록할 수 있다.In addition, when the camera 212c is provided, it can also be configured as a black box, so that when the user moves to the optimal movement route data, the situation can be photographed and recorded.
이에 따라, 보조보행장치(200)의 센서부(210)를 통해 장애물, 인파 및 험로, 이동 가능한 폭 크기 등에 대한 정보를 포함하는 거리 정보를 수집할 수 있다.Accordingly, through the
이와 같이 수집된 거리 정보가 사용자단말(100)의 센서정보부(140)에 전송되며, 센서정보부(140)를 통해 중앙 서버(400)로 전송되며, 중앙 서버(400)에서 거리 정보들이 처리되어 빅데이터가 지속적으로 업데이트될 수 있다.The collected distance information is transmitted to the sensor information unit 140 of the
한편, 센서정보부(140)는 센서부(210)로부터 실시간으로 수신 받은 거리 정보에 따라 장애물이 감지되거나 이동 가능한 폭 크기가 아닐 경우, 알림으로 사용자에게 알려줄 수 있다.Meanwhile, the sensor information unit 140 may inform the user through a notification when an obstacle is detected according to the distance information received from the
즉, 센서정보부(140)는 초음파 센서(212a), 레이더 센서(212b)를 통해 근접한 위치에 장애물 또는 사람이 존재함이 인지되면 알림을 줄 수 있으며, 카메라(212c)로부터 수신된 촬영이미지를 분석하여 이동 가능한 폭 크기를 도출하고, 도출된 이동 가능한 폭 크기와 보조보행장치(200)의 폭 크기를 비교하여 이동 가능한 폭 크기가 작을 경우 알림을 줄 수 있는 것이다.That is, the sensor information unit 140 may give a notification when an obstacle or a person is recognized in a nearby location through the ultrasonic sensor 212a and the radar sensor 212b, and analyze the captured image received from the camera 212c. By deriving the size of the movable width, comparing the size of the derived size and the width of the movable
외부정보서버(300)는 최적의 경로를 산출하기 위해 거리에 대한 정보를 수신 받는 서버로서, 기상청 서버(310) 및 공공API서버(320)을 포함할 수 있다.The
기상청 서버(310)는 날짜, 요일 및 시간에 따른 날씨 정보를 중앙 서버(400)로 제공할 수 있다.The Korea Meteorological Administration server 310 may provide weather information according to date, day, and time to the
예를 들어, 기상청 서버(310)는 중앙 서버(400)로부터 사용자 거리 정보를 수신 받아, 사용자 거리 정보에 따른 인근 날씨 정보를 중앙 서버(400)로 전송할 수 있으나, 이에 한정되지 않고, 전 거리에 대한 날씨 정보를 중앙 서버(400)에 실시간으로 전송하는 등 다양하게 이루어질 수 있다.For example, the Korea Meteorological Administration server 310 may receive user distance information from the
공공API서버(320)는 공사 현장 이나 이동 경로의 통제 상황의 공공 정보를 중앙 서버(400)로 제공할 수 있는 것으로, 중앙 서버(400)로부터 사용자 거리 정보를 수신 받아, 사용자 거리 정보에 따라 주변 위치에 해당하는 공공 정보를 중앙 서버(400)로 전송할 수 있으나, 이에 한정되지 않고, 모든 공공 정보를 실시간으로 중앙 서버(400)에 제공하여 중앙 서버(400)에서 판단하도록 할 수도 있다.The public API server 320 is capable of providing public information on construction sites or movement route control situations to the
중앙 서버(400)는 다수의 보조보행장치(200)로부터 거리 정보를 수집하여 생성된 빅데이터를 기반으로 날씨 정보와 공공 정보를 이용하여 사용자 이동 정보에 따라 최적의 이동경로데이터를 생성할 수 있고, 사용자단말(100)로 제공할 수 있다.The
구체적으로, 중앙 서버(400)는 빅데이터저장부(410) 및 최적경로산출부(420)를 포함할 수 있다.Specifically, the
빅데이터저장부(410)는 다수의 보조보행장치(200)를 통해 수집되는 거리 정보를 빅데이터화하여 저장하며, 사용자단말(100)로부터 전송 받은 거리 정보를 축적하는 것으로 빅데이터를 업데이트 시킬 수 있다.The big
여기서, 수집된 거리 정보는 경사, 진동, 험로, 장애물, 인파, 촬영 이미지, 이동 가능한 폭 크기, 지면 특성, 공사 현장 등일 수 있다.Here, the collected distance information may include slopes, vibrations, rough roads, obstacles, crowds, photographed images, movable widths, ground characteristics, construction sites, and the like.
즉, 빅데이터저장부(410)에 저장되는 빅데이터는 경사, 진동, 험로, 장애물, 인파, 촬영 이미지, 이동 가능한 폭 크기, 지면 특성, 공사 현장 등에 따른 거리 통제 상황 중 하나 이상을 포함하는 거리 정보가 수집되어 빅데이터화된 것일 수 있다.That is, the big data stored in the big
한편, 빅데이터저장부(410)는 수집된 촬영이미지(전방을 촬영한 이미지)로부터 장애물을 인식할 수 있다. 이를 통해 장애물에 대한 거리 정보가 수집될 수 있는 것이다.Meanwhile, the big
또한, 빅데이터저장부(410)는 인식된 장애물로부터, 좌우측에 위치한 장애물간의 폭을 분석하여 해당 거리의 이동 가능한 폭 크기를 도출할 수 있다.In addition, the big
이때, 빅데이터저장부(410)는 촬영된 위치로부터 동일 거리에 위치하는 장애물들끼리 그룹화할 수 있으며, 그룹별로 좌우에 위치하는 장애물을 판단하여 그 장애물간의 폭을 분석할 수 있다.At this time, the big
보다 구체적으로, 하나의 그룹에서 좌측에 위치하는 장애물, 우측에 위치하는 장애물을 거리의 중심을 기준으로 구별한 후, 좌측에 위치하는 장애물, 우측에 위치하는 장애물에서 각각 최내측에 위치하는 장애물을 선정하여 그 장애물간의 폭을 구하는 것으로 이동 가능한 폭 크기를 도출할 수 있다.More specifically, after distinguishing the obstacles located on the left and the obstacles located on the right in one group based on the center of the distance, the obstacles located on the left and the obstacles located on the right, respectively, are determined to be the innermost obstacles. By selecting and calculating the width between the obstacles, the size of the movable width can be derived.
이 때, 빅데이터는 수집된 거리 정보들을 거리 구역별로 분류되어 저장될 수 있다. 여기서 갈림길이 발생하기 전까지의 거리를 하나의 구역으로 지칭할 수 있으며, 해당 구역에 대한 거리 정보가 저장될 수 있는 것이다.In this case, the big data may be stored by classifying the collected street information by street zone. Here, the distance until a fork occurs can be referred to as one zone, and distance information on the zone can be stored.
또한 빅데이터저장부(410)는 외부정보서버(300)로부터 수신 받은 날씨 정보와 공공 정보를 해당 구역에 매칭시켜 저장되도록 할 수도 있다.In addition, the big
또한, 빅데이터저장부(410)는 사용자단말(100)로부터 수신 받은 경로 정보를 분석하고, 사용자가 자주 이용하는 거리를 도출하여, 그에 대한 정보를 저장할 수도 있다.In addition, the big
여기서, 최적경로산출부(420)는 사용자단말(100)로부터 사용자 이동 정보를 전송 받으면 빅데이터저장부(410)에 저장된 빅데이터를 기반으로 외부정보서버(300)의 기상청 서버(310)의 날씨 정보와 공공API서버(320)의 공사 현장이나 이동 경로 통제 상황 등의 정보를 이용하여 보행장애인이 사용자 이동 정보를 최적의 이동경로데이터를 산출하여 사용자단말(100)에 제공할 수 있다.Here, the optimal
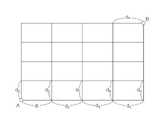
예를 들어, 최적경로산출부(420)는 사용자단말(100)로부터 수신 받은 사용자 이동 정보의 현재 위치 정보(A)와 목적지 정보(B)를 기반으로, 도 7과 같이 A의 위치에서 B의 위치까지 이동할 수 있는 경로에 포함되는 구역을 도출하여 이동 가능 구역 정보를 생성할 수 있다.For example, the optimal
이를 통해 최적경로산출부(420)는 빅데이터저장부(410)로부터 이동 가능 구역 정보에 대응되는 빅데이터를 가져올 수 있으며, 이동 가능 구역 정보에 대응되는 날씨 정보와 공공 정보를 외부정보서버(300)로부터 수신 받을 수 있다.Through this, the optimal
이에 따라 최적경로산출부(420)는 이동 가능 구역 정보의 각 구역별(d1,d2,d3,d4, d5, ··· dn)로 보행 안전도를 도출할 수 있는데, 이는 빅데이터, 날씨 정보, 공공 정보를 이용하여 진행할 수 있다. 여기서 보행 안전도란 보조보행장치(200)로 이동하기에 안전한 정도를 의미한다.Accordingly, the optimal
보다 구체적으로, 최적경로산출부(420)는 이동 가능 구역 정보의 구역별로 해당 구역의 거리 정보(기울기, 경사, 험로, 이동 가능한 폭 크기 등), 날씨 정보, 공공 정보를 변수값으로 이용하여 보행 안전도를 도출할 수 있다.More specifically, the optimal
최적경로산출부(420)는 이와 같이 이동 가능 구역 정보의 구역별로 보행 안전도가 도출됨에 따라, 보행 안전도가 높은 구역들을 선별하고 이를 종합하여 최적의 이동경로데이터를 생성할 수 있다.As the pedestrian safety level is derived for each zone of the movable zone information, the optimal
또한, 최적경로산출부(420)는 사용자단말(100)로부터 연동되어 있는 보조보행장치(200)의 폭 값을 수신 받아, 구역을 선정할 시 해당 구역의 이동 가능한 폭 크기와 보조보행장치(200)의 폭 값을 비교하여 보조보행장치(200)의 폭 값보다 이동 가능한 폭 크기가 큰 구역들을 선정할 수도 있다.In addition, the optimal
또한 최적경로산출부(420)는 최적의 이동경로데이터를 생성할 시, 구역별 보행 안전도의 유사도에 따라 최단 거리를 고려하여 구역을 선정할 수도 있다.In addition, the optimal
이를 통해 보행 장애인이 안전하게 보행할 수 있으면서도 최단 거리로 이동할 수 있는 경로를 안내할 수 있다.Through this, it is possible to guide a path through which a person with a walking disability can safely walk and move in the shortest distance.
도 8은 본 발명의 제 2실시예에 따른 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션 시스템의 사용자단말을 나타낸 블록도이며, 도 9는 도 8의 보행장치제어부의 구성을 보여주기 위한 블록도이고, 도 10은 본 발명의 제 2실시예에 따른 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션 시스템의 중앙 서버에 대중교통부가 더 포함되는 모습을 보여주기 위한 블록도이다.8 is a block diagram showing a user terminal of a smart navigation system for guiding an optimal route centered around a walking disabled person according to a second embodiment of the present invention, and FIG. 9 is a block diagram showing the configuration of a walking device control unit of FIG. 8 FIG. 10 is a block diagram showing how the public transportation unit is further included in the central server of the smart navigation system for guiding the optimal route centered on the walking disabled person according to the second embodiment of the present invention.
도 7을 참조하면, 본 발명의 제 2실시예에 따른 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션 시스템(1)의 사용자단말(100)은 위험감지부(160) 및 보행장치제어부(170)를 더 포함할 수 있으며, 보조보행장치(200)를 이용하는 보행 장애인의 위험을 감지하거나, 거리 정보에 경사에 있어 좌석프레임을 각도를 조절할 수 있다.Referring to FIG. 7 , the
또한, 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션 시스템(1)은 중앙 서버(400)는 대중교통부(430)를 더 포함하여, 보행 장애인 전용 교통수단의 정보를 제공 받을 수 있다.In addition, in the
한편, 위험감지부(160) 및 보행장치제어부(170), 대중교통부(430)를 제외하고 본 발명의 제 2실시예에 따른 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션 시스템(1)은 실질적으로 동일하다고 볼 수 있다.On the other hand, the
따라서, 위험감지부(160) 및 보행장치제어부(170), 대중교통부(430)에 대해서만 설명하기로 한다.Therefore, only the danger detection unit 160, the walking
먼저, 위험감지부(160)는 보조보행장치(200)가 이동 시, 충돌이나 위치 변화에 감지에 따라 위험으로 판단되는 상황이 발생되면, 지면측정부(212)가 카메라(212c)를 통해 현재 위치 장소를 촬영하여 이미지를 생성하여, 중앙 서버(400) 및 보호자단말로 전송하여 보행 장애인을 위험 상황으로부터 알릴 수 있다.First, the danger detecting unit 160 is when the
이 때, 말하는 위험으로 판단되는 상황이란, 보조보행장치(200)에 구비되어 있는 지면측정부(211)의 경사 및 진동센서가 충돌을 감지하거나, 전복되었을 경우 또는 중앙 서버(400)에서 전송 받은 최적의 이동경로데이터에 따라 이동 하였을 때, 목적지로 이동하지 않고, 일정 시간 동안 위치가 변하지 않거나 최적의 이동경로데이터와 크게 벗어난 위치로 이동하였을 경우를 말한다.At this time, the situation that is determined to be a speaking risk is when the inclination and vibration sensor of the ground measurement unit 211 provided in the
도 8을 참조하면, 보행장치제어부(170)는 열선관리부(171) 및 각도조절부(172)를 포함할 수 있다.Referring to FIG. 8 , the walking
더욱 상세하게, 열선관리부(171)는 중앙 서버(400)에서 제공 받은 날씨 정보와 기 설정된 온도 값을 비교하여 온도가 낮으면 전동휠체어의 열선을 제어할 수 있다.More specifically, the heating wire management unit 171 compares the weather information received from the
또한, 각도조절부(172)는 보조보행장치(200)가 전동휠체어나 휠체어로 구성될 경우, 중앙 서버(400)에 전송 받은 거리 정보의 경사에 따라 좌석프레임의 각도를 조절하여 보행 장애인이 경사가 있는 이동 경로에 있어 안전하고 용이하게 이동하도록 할 수 있다.In addition, the angle adjustment unit 172 adjusts the angle of the seat frame according to the inclination of the distance information transmitted to the
도 9를 참조하면, 중앙 서버(400)는 대중교통부(430)을 포함할 수 있다.Referring to FIG. 9 , the
먼저, 대중교통부(430)는 중앙 서버(400)에서 최적경로산출부(420)에서 산출된 목적지 도착 정보와 목적지에서의 보행 장애인 전용 대중교통의 정보를 종합하여 도착시간이나 기타 여러가지 보행 장애인이 이용할 수 있는 교통 정보를 제공받을 수 있다.First, the
여기서 말하는 보행 장애인 대중 교통이란, 버스, 장애인전용택시, 지하철 및 장애인전용이동수단을 말 할 수 있다.Public transportation for the disabled refers to buses, taxis for the disabled, subways, and means of transportation for the disabled.
또한, 대중교통의 교통 정보는 대중 교통의 출발 시간이나 도착 시간 및 운행 정보나 대중 교통의 목적지 정보 등일 수 있다.In addition, the traffic information of public transportation may be a departure time or arrival time of public transportation, operation information, or destination information of public transportation.
이상에서 설명한 본 발명의 실시 예는 장치 및/또는 방법을 통해서만 구현이 되는 것은 아니며, 본 발명의 실시 예의 구성에 대응하는 기능을 실현하기 위한 프로그램, 그 프로그램이 기록된 기록 매체 등을 통해 구현될 수도 있으며, 이러한 구현은 앞서 설명한 실시 예의 기재로부터 본 발명이 속하는 기술분야의 전문가라면 쉽게 구현할 수 있는 것이다.The embodiments of the present invention described above are not implemented only through devices and/or methods, and may be implemented through a program for realizing functions corresponding to the configuration of the embodiments of the present invention, a recording medium on which the program is recorded, and the like. Also, such an implementation can be easily implemented by an expert in the technical field to which the present invention belongs based on the description of the above-described embodiments.
또한, 이상에서 본 발명의 실시 예에 대하여 상세하게 설명하였지만 본 발명의 권리범위는 이에 한정되는 것은 아니고 다음의 청구범위에서 정의하고 있는 본 발명의 기본 개념을 이용한 당업자의 여러 변형 및 개량 형태 또한 본 발명의 권리범위에 속하는 것이다.In addition, although the embodiments of the present invention have been described in detail above, the scope of the present invention is not limited thereto, and various modifications and improvements of those skilled in the art using the basic concept of the present invention defined in the following claims are also provided. belong to the scope of the invention.
1 : 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션 시스템
100 : 사용자단말
110 : 설정부
120 : GPS데이터부
130 : 디스플레이어부
140 : 센서정보부
150 : 자율주행부
160 : 위험감지부
170 : 보행장치제어부
171 : 열선관리부
172 : 각도조절부
200 : 보조보행장치
210 : 센서부
211 : 지면측정부
212 : 거리특성감지부
212a : 초음파 센서
212b : 레이더 센서
212c : 카메라
300 : 외부정보서버
310 : 기상청 서버
320 : 공공API서버
400 : 중앙 서버
410 : 빅데이터저장부
420 : 최적경로산출부
430 : 대중교통부
A : 현재 위치 정보
B : 목적지 정보1: Smart navigation system that guides the optimal route centered on the walking handicapped
100: user terminal
110: setting unit
120: GPS data unit
130: display fisherman
140: sensor information unit
150: autonomous driving unit
160: risk detection unit
170: walking device control unit
171: heat wire management unit
172: angle adjustment unit
200: auxiliary walking device
210: sensor unit
211: ground measurement unit
212: distance characteristic detection unit
212a: ultrasonic sensor
212b: radar sensor
212c: camera
300: external information server
310: Korea Meteorological Administration server
320: public API server
400: central server
410: big data storage unit
420: optimal path calculation unit
430: Ministry of Public Transportation
A: Current location information
B: destination information
Claims (8)
Translated fromKorean사용자로부터 목적지에 따라 사용자 이동 정보를 입력 받고, 최적의 이동경로데이터에 따라 이동 경로를 안내하는 하나 이상의 사용자단말;
날짜, 요일 및 시간에 따른 날씨 정보를 제공하는 기상청 서버와 공사 현장이나 이동 경로의 통제 상황의 공공 정보를 제공하는 공공API서버를 포함하는 외부정보서버 및
보조보행장치로부터 상기 거리 정보를 수집하여 생성된 빅데이터를 기반으로 상기 날씨 정보와 공공 정보를 이용하여 상기 사용자 이동 정보에 따라 상기 최적의 이동경로데이터를 생성하여 상기 사용자단말로 제공하는 중앙 서버를 포함하며,
상기 중앙 서버는,
다수의 보조보행장치로부터 거리 정보를 수집하여 생성된 빅데이터를 저장하고, 상기 사용자단말에서 제공 받은 상기 사용자 이동 정보를 저장하는 빅데이터저장부 및
상기 빅데이터를 기반으로 상기 날씨 정보와 공공 정보를 이용하여 상기 사용자 이동 정보에 따라 상기 최적의 이동경로데이터를 산출하여 상기 사용자단말에 제공하는 최적경로산출부를 포함하는 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션 시스템.
In the smart navigation system for guiding the optimal route centered on the walking handicapped,
One or more user terminals that receive user movement information according to a destination from a user and guide a movement route according to optimal movement route data;
An external information server including a Meteorological Agency server that provides weather information according to date, day and time and a public API server that provides public information on control conditions of construction sites or movement routes; and
A central server that generates the optimal movement route data according to the user movement information using the weather information and public information based on big data generated by collecting the distance information from the assistive walking device and provides the data to the user terminal. contains,
The central server,
A big data storage unit for storing big data generated by collecting distance information from a plurality of auxiliary walking devices and storing the user movement information provided from the user terminal; and
Based on the big data, the optimal route calculation unit for calculating the optimal movement route data according to the user's movement information using the weather information and public information, and providing the data to the user terminal, guides the optimal route centered on the walking handicapped. smart navigation system.
상기 사용자단말은,
사용자 조작 또는 음성 인식으로 목적지를 설정하는 설정부;
상기 설정부를 통해 설정된 목적지 정보와 현재 위치 정보를 종합하여 상기 사용자 이동 정보를 상기 중앙 서버로 전송하는 GPS데이터부 및
상기 중앙 서버로부터 최적의 이동경로데이터를 수신 받아 이동경로를 음성안내 또는 화면으로 표시하는 디스플레이부를 포함하는 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션 시스템.
According to claim 1,
The user terminal,
a setting unit for setting a destination by user manipulation or voice recognition;
A GPS data unit for synthesizing destination information and current location information set through the setting unit and transmitting the user movement information to the central server; and
A smart navigation system for guiding an optimal route centered on a walking disabled person, including a display unit receiving optimal movement route data from the central server and displaying the movement route with voice guidance or a screen.
상기 사용자단말은,
연동된 보조보행장치의 센서부로부터 거리 정보를 수신 받아 상기 중앙 서버에 전송하는 센서정보부를 포함하고,
상기 빅데이터저장부는,
상기 센서정보부의 상기 거리 정보를 전송 받아 저장된 빅데이터를 업데이트하는 것을 특징으로 하는 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션 시스템.
According to claim 2,
The user terminal,
Includes a sensor information unit for receiving distance information from the sensor unit of the interlocked auxiliary walking device and transmitting it to the central server;
The big data storage unit,
A smart navigation system for guiding an optimal route centered on a walking disabled person, characterized in that by receiving the distance information of the sensor information unit and updating the stored big data.
상기 센서부는,
거리의 경사 및 험로를 측정하는 지면측정부 및
초음파 센서, 레이더 센서 및 카메라 중 하나 이상이 구비되어, 거리의 특성을 파악하는 거리특성감지부를 포함하는 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션 시스템.
According to claim 3,
The sensor unit,
A ground measuring unit that measures the slope and rough road of the street and
A smart navigation system for guiding an optimal route for a person with a walking handicapped, including a distance characteristic detecting unit equipped with at least one of an ultrasonic sensor, a radar sensor, and a camera to determine a characteristic of a distance.
상기 사용자단말은,
전동 보조보행장치와 연동될 경우, 제공 받은 상기 최적의 이동경로데이터에 따라 상기 전동 보조보행장치를 자율 주행하도록 하는 자율주행부를 포함하는 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션 시스템.
According to claim 1,
The user terminal,
A smart navigation system for guiding an optimal route centered on a walking disabled person, including an autonomous driving unit for autonomously driving the electric assistive walking device according to the provided optimal movement route data when interlocked with the powered walking device.
상기 사용자단말은,
상기 최적의 이동경로데이터에 따라 이동 시, 충돌 또는 위치 변화 감지에 따라 위험으로 판단되면 상기 카메라를 통해 촬영이 이루어지도록 하여, 촬영이미지를 상기 중앙 서버 및 보호자단말 중 하나 이상에 전송하는 위험감지부를 더 포함하는 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션 시스템.
According to claim 4,
The user terminal,
When moving according to the optimal movement route data, when it is judged to be dangerous according to collision or position change detection, the risk detection unit for transmitting the captured image to one or more of the central server and the guardian terminal by allowing the camera to be photographed A smart navigation system that guides the optimal route centered on the walking handicapped including more.
상기 사용자단말은,
상기 보조보행장치를 제어하는 보행장치제어부를 더 포함하고,
상기 보행장치제어부는,
상기 중앙 서버에서 제공 받은 날씨 정보에 따라, 상기 보조보행장치 좌석프레임의 열선을 제어하는 열선관리부 및
상기 중앙 서버에서 제공 받은 상기 최적의 이동경로데이터에 따라 상기 보조보행장치 좌석프레임의 각도를 제어하는 각도조절부를 포함하는 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션 시스템.
According to claim 1,
The user terminal,
Further comprising a walking device control unit for controlling the auxiliary walking device,
The walking device control unit,
A heating wire management unit controlling the heating wire of the seat frame of the assistive walking device according to the weather information received from the central server; and
A smart navigation system for guiding an optimal route centered on a walking disabled person, including an angle adjusting unit for controlling an angle of the seat frame of the assistive walking device according to the optimal movement route data provided from the central server.
상기 중앙 서버는,
대중교통의 도착시간 정보를 제공하는 대중교통부를 더 포함하고,
상기 대중교통부는,
상기 최적경로산출부에서 제공받은 상기 최적의 이동경로데이터에 따라서 이용 가능한 장애인 전용 대중교통수단의 대중교통정보를 종합하여 상기 사용자단말에 전송하는 것을 특징으로 하는 보행 장애인 중심의 최적 경로를 안내하는 스마트 네비게이션 시스템.
According to claim 1,
The central server,
Further comprising the Ministry of Public Transportation, which provides information on the arrival time of public transportation;
The Ministry of Public Transport,
Smart that guides the optimal route centered on the walking disabled, characterized in that the public transportation information of available public transportation means for the disabled is synthesized and transmitted to the user terminal according to the optimal movement route data provided by the optimal route calculation unit. navigation system.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020210077655AKR102541618B1 (en) | 2021-06-15 | 2021-06-15 | Smart navigation system for guiding the best route around pedestrian disability |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020210077655AKR102541618B1 (en) | 2021-06-15 | 2021-06-15 | Smart navigation system for guiding the best route around pedestrian disability |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20220168240Atrue KR20220168240A (en) | 2022-12-23 |
| KR102541618B1 KR102541618B1 (en) | 2023-06-08 |
Family
ID=84536267
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020210077655AActiveKR102541618B1 (en) | 2021-06-15 | 2021-06-15 | Smart navigation system for guiding the best route around pedestrian disability |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102541618B1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116753976A (en)* | 2023-08-18 | 2023-09-15 | 北京大也智慧数据科技服务有限公司 | Walking navigation method and device |
| KR20240125268A (en) | 2023-02-10 | 2024-08-19 | 한남대학교 산학협력단 | Barrier-free navigation system by disability type and grade |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20170033612A (en)* | 2015-09-17 | 2017-03-27 | 엘지전자 주식회사 | Driver Assistance Apparatus and Vehicle Having The Same |
| KR20200094249A (en)* | 2019-01-29 | 2020-08-07 | 엘지전자 주식회사 | Electric wheelchair and control method thereof |
| KR20200134138A (en)* | 2019-05-21 | 2020-12-01 | 엘지전자 주식회사 | Path providing device and path providing method tehreof |
| KR20210029409A (en)* | 2019-09-06 | 2021-03-16 | 인하대학교 산학협력단 | Wheelchair operation system and method for performing autonomous driving using map information linked with gis including wheelchair movement information |
- 2021
- 2021-06-15KRKR1020210077655Apatent/KR102541618B1/enactiveActive
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20170033612A (en)* | 2015-09-17 | 2017-03-27 | 엘지전자 주식회사 | Driver Assistance Apparatus and Vehicle Having The Same |
| KR20200094249A (en)* | 2019-01-29 | 2020-08-07 | 엘지전자 주식회사 | Electric wheelchair and control method thereof |
| KR20200134138A (en)* | 2019-05-21 | 2020-12-01 | 엘지전자 주식회사 | Path providing device and path providing method tehreof |
| KR20210029409A (en)* | 2019-09-06 | 2021-03-16 | 인하대학교 산학협력단 | Wheelchair operation system and method for performing autonomous driving using map information linked with gis including wheelchair movement information |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20240125268A (en) | 2023-02-10 | 2024-08-19 | 한남대학교 산학협력단 | Barrier-free navigation system by disability type and grade |
| CN116753976A (en)* | 2023-08-18 | 2023-09-15 | 北京大也智慧数据科技服务有限公司 | Walking navigation method and device |
| CN116753976B (en)* | 2023-08-18 | 2023-12-22 | 广西大也智能数据有限公司 | Walking navigation method and device |
Also Published As
| Publication number | Publication date |
|---|---|
| KR102541618B1 (en) | 2023-06-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3895225B2 (en) | Vehicle warning system | |
| US11380192B2 (en) | Autonomous mobile object and information collection system | |
| KR102541618B1 (en) | Smart navigation system for guiding the best route around pedestrian disability | |
| CN109960735A (en) | people search system | |
| JP2017146711A (en) | Image processing device, warning apparatus, image processing system, and image processing method | |
| US11875676B1 (en) | Systems and methods for providing warnings of imminent hazards | |
| KR101810576B1 (en) | Drone Apparatus for Assisting a Visually Handicapped Person and Method for Controlling the Same | |
| US20190178676A1 (en) | System and method for providing navigation service of disabled person | |
| CN111531541A (en) | Motion control method and system for medical equipment | |
| KR101998834B1 (en) | Traffic Information Providing System Enabling Traffic Accident Risk Prediction | |
| KR20130003521A (en) | Driving guidance system using sensors | |
| US20250251253A1 (en) | Vehicle operation zone detection | |
| Pawar et al. | Smartphone based tactile feedback system providing navigation and obstacle avoidance to the blind and visually impaired | |
| JP2005143892A (en) | Walking support device | |
| Somyat et al. | NavTU: android navigation app for Thai people with visual impairments | |
| US20220349718A1 (en) | Navigation indication of a vehicle | |
| JP7239013B2 (en) | GUIDING DEVICE, GUIDING METHOD, PROGRAM | |
| WO2020115981A1 (en) | Recognition processing device, recognition processing method, and program | |
| KR102407126B1 (en) | Smart glasses system for the visually and hearing impaired with shape and color recognition cameras | |
| KR102180611B1 (en) | A Vehicle Including Traffic Information System | |
| CN114527951A (en) | Blind person assisting navigation method, blind person assisting system and readable storage medium | |
| JP7207828B2 (en) | INFORMATION NOTIFICATION DEVICE, INFORMATION NOTIFICATION METHOD, INFORMATION NOTIFICATION SYSTEM, PROGRAM | |
| EP4624291A1 (en) | Mobile body, control device and control method therefor, and program | |
| KR102688145B1 (en) | Autonomous driving system for walking aids using artificial intelligence | |
| JP7611054B2 (en) | Information processing device, mobile object, control method thereof, and program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application | Patent event code:PA01091R01D Comment text:Patent Application Patent event date:20210615 | |
| PA0201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection | Comment text:Notification of reason for refusal Patent event date:20221117 Patent event code:PE09021S01D | |
| PG1501 | Laying open of application | ||
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration | Patent event code:PE07011S01D Comment text:Decision to Grant Registration Patent event date:20230531 | |
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment | Comment text:Registration of Establishment Patent event date:20230602 Patent event code:PR07011E01D | |
| PR1002 | Payment of registration fee | Payment date:20230602 End annual number:3 Start annual number:1 | |
| PG1601 | Publication of registration |