KR20180007446A - Running exerciser for a pet - Google Patents
Running exerciser for a petDownload PDFInfo
- Publication number
- KR20180007446A KR20180007446AKR1020160088460AKR20160088460AKR20180007446AKR 20180007446 AKR20180007446 AKR 20180007446AKR 1020160088460 AKR1020160088460 AKR 1020160088460AKR 20160088460 AKR20160088460 AKR 20160088460AKR 20180007446 AKR20180007446 AKR 20180007446A
- Authority
- KR
- South Korea
- Prior art keywords
- unit
- animal
- rotation
- accommodation space
- main body
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; AVICULTURE; APICULTURE; PISCICULTURE; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K15/00—Devices for taming animals, e.g. nose-rings or hobbles; Devices for overturning animals in general; Training or exercising equipment; Covering boxes
- A01K15/02—Training or exercising equipment, e.g. mazes or labyrinths for animals ; Electric shock devices; Toys specially adapted for animals
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; AVICULTURE; APICULTURE; PISCICULTURE; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K29/00—Other apparatus for animal husbandry
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Environmental Sciences (AREA)
- Animal Husbandry (AREA)
- Biodiversity & Conservation Biology (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Physical Education & Sports Medicine (AREA)
- Animal Behavior & Ethology (AREA)
- Zoology (AREA)
- Housing For Livestock And Birds (AREA)
Abstract
Description
Translated fromKorean본 발명은 애완동물용 런닝머신에 관한 것으로써, 보다 상세하게는 동물이 수용되는 본체부에 도어부를 설치하여 동물을 보다 안전하게 산책, 운동시킬 수 있는 애완동물용 런닝머신에 관한 것이다.BACKGROUND OF THE INVENTION 1. Field of the Invention The present invention relates to a pneumatic treadmill, and more particularly to a pneumatic treadmill capable of safely walking and exercising an animal by providing a door portion in a main body portion where an animal is accommodated.
반려동물을 키우는 가정이 증대됨에 따라, 반려동물에 대한 여러 편의 장치가 연구, 개발되고 있다.As the number of families raising a companion increases, many devices for companion animals are being researched and developed.
한국등록실용신안공보 제20-0344388호는 런닝머쉰용 동물운동기구를 개시하고 있다. 한국등록실용신안공보 제20-0344388호에서 개시되는 런닝머쉰용 동물운동기구는 런닝머쉰(10)에 가이드레일(21)을 설치하고, 동물의 목에 착용되는 목걸이(28)가 가이드레일(21)에 연결되는 것으로써, 동물의 목에 목걸이(28)가 채워진 상태에서 런닝머쉰(10) 위에서 운동할 수 있게 고안된 기술이다.Korean Registered Utility Model No. 20-0344388 discloses an animal exercise machine for a running machine. Korean Utility Model Laid-Open No. 20-0344388 discloses an animal exercise machine for a running machine in which a guide rail 21 is installed on a running machine 10 and a necklace 28 which is worn on the neck of an animal is mounted on a guide rail 21 And is designed to be able to move on the running machine 10 with the necklace 28 filled in the neck of the animal.
이러한 종래의 기술에 의하면, 동물의 운동시, 목걸이에 의해서 동물의 목이 압박을 받아 동물의 건강에 오히려 해가 될 수 있고, 동물의 목이 목걸이에서 이탈되어 동물이 런닝머쉰으로부터 벗어나려는 경우, 몸체와 벨트 사이에 동물의 다리가 개재되는 등의 위험성이 있다.According to this conventional technique, when the animal is exercising, the animal's neck is pressed by the necklace, which can cause harm to the health of the animal. When the animal's neck is separated from the necklace and the animal is to be moved away from the running machine, There is a danger that the animal's legs are interposed between the belts.
본 발명은 상술한 종래의 문제점을 해결하기 위한 것으로써, 동물이 수용되는 본체부에 도어부를 설치하여 동물을 보다 안전하게 산책, 운동시킬 수 있는 애완동물용 런닝머신를 제공함에 있다.Disclosure of Invention Technical Problem [8] Accordingly, the present invention has been made keeping in mind the above problems occurring in the prior art, and an object of the present invention is to provide a pneumatic treadmill capable of safely walking and exercising an animal by providing a door portion in a body portion.
상기 목적은, 본 발명에 따라, 본체부; 동물이 수용될 수 있는 수용공간을 형성하며, 상기 본체부에 회전가능하게 설치되는 회전부; 상기 회전부에 동력을 제공하는 구동부; 및 상기 수용공간의 일측면이 마감되도록 상기 본체부에 설치되며, 상기 동물이 상기 수용공간으로 인입되거나 상기 동물이 상기 수용공간으로부터 인출될 수 있도록 상기 수용공간의 일측면을 개방하는 도어부를 포함하는 애완동물용 런닝머신에 의해 달성된다.The object is achieved according to the present invention by providing a method of manufacturing a semiconductor device, A rotatable portion rotatably installed in the main body portion to form an accommodation space in which the animal can be accommodated; A driving unit for providing power to the rotating unit; And a door portion that is installed in the main body portion to close one side of the accommodation space and opens one side of the accommodation space so that the animal can be drawn into the accommodation space or the animal can be drawn out from the accommodation space It is accomplished by a pet treadmill.
또한, 상기 회전부는, 상면에 장애모듈이 설치될 수 있다.In addition, the rotation unit may be provided with an obstacle module on its upper surface.
또한, 본 발명은, 상기 구동부를 제어하는 제어부; 상기 회전부의 회전량을 측정하여 회전정보를 생성하는 센서부; 및 상기 회전부의 상태를 외부에서 모니터링할 수 있도록 상기 회전정보를 전달받아 외부로 전달하며, 상기 제어부의 동작이 제어되도록 외부에서 전달받은 정보를 상기 제어부로 전달하는 통신부를 더 포함할 수 있다.According to another aspect of the present invention, A sensor unit for measuring the rotation amount of the rotation unit and generating rotation information; And a communication unit for transmitting the rotation information to the outside so as to monitor the state of the rotation unit from the outside and transmitting the information received from the outside to the outside so that the operation of the control unit is controlled.
또한, 상기 센서부는, 한쌍으로 마련되어 상기 회전부와 상기 본체부에 각각 설치되며, 자성을 이용하여 상기 회전량을 측정할 수 있다.In addition, the sensor units are provided in pairs and are respectively provided in the rotation unit and the main body unit, and the amount of rotation can be measured using magnetism.
또한, 본 발명은, 상기 통신부로부터 상기 회전정보를 전달받아 화면에 표시하는 단말기를 더 포함할 수 있다.In addition, the present invention may further include a terminal for receiving the rotation information from the communication unit and displaying the rotation information on the screen.
본 발명에 따르면, 동물의 운동시 동물이 본체부로부터 이탈되는 것이 효과적으로 방지된다. 이에 의해서, 동물을 보다 안전하게 산책, 운동시킬 수 있다.According to the present invention, it is effectively prevented that the animal is dislodged from the body part during exercise of the animal. This makes it possible to walk and exercise animals more safely.
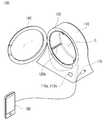
도 1은 본 발명의 일실시예에 따른 애완동물용 런닝머신를 전체적으로 도시한 것이고,
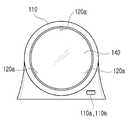
도 2는 본 발명의 일실시예에 따른 애완동물용 런닝머신의 본체부를 정면에서 도시한 것이고,
도 3은 본 발명의 일실시예에 따른 애완동물용 런닝머신의 회전부와 구동부를 도시한 것이고,
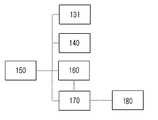
도 4는 본 발명의 일실시예에 따른 애완동물용 런닝머신의 구성간의 전기적인 연결을 도시한 것이고,
도 5는 본 발명의 일실시예에 따른 애완동물용 런닝머신의 회전부와 센서부와 통신부를 도시한 것이고,
도 6은 본 발명의 일실시예에 따른 애완동물용 런닝머신의 동작을 도시한 것이다.1 is a general view of a pet treadmill according to an embodiment of the present invention,
2 is a front view of a main body of a treadmill for a pet according to an embodiment of the present invention,
FIG. 3 illustrates a rotating part and a driving part of a treadmill for a pet according to an embodiment of the present invention,
4 illustrates electrical connections between configurations of a pet treadmill according to an embodiment of the present invention,
FIG. 5 illustrates a rotating part, a sensor part, and a communication part of a treadmill for a pet according to an embodiment of the present invention,
6 illustrates an operation of a treadmill for a pet according to an embodiment of the present invention.
이하, 첨부한 도면을 참조하여 본 발명의 일실시예에 따른 애완동물용 런닝머신에 대해서 상세히 설명한다.Hereinafter, a treadmill for a pet according to an embodiment of the present invention will be described in detail with reference to the accompanying drawings.
도 1은 본 발명의 일실시예에 따른 애완동물용 런닝머신를 전체적으로 도시한 것이고, 도 2는 본 발명의 일실시예에 따른 애완동물용 런닝머신의 본체부를 정면에서 도시한 것이고, 도 3은 본 발명의 일실시예에 따른 애완동물용 런닝머신의 회전부와 구동부를 도시한 것이고, 도 4는 본 발명의 일실시예에 따른 애완동물용 런닝머신의 구성간의 전기적인 연결을 도시한 것이고, 도 5는 본 발명의 일실시예에 따른 애완동물용 런닝머신의 회전부와 센서부와 통신부를 도시한 것이고, 도 6은 본 발명의 일실시예에 따른 애완동물용 런닝머신의 동작을 도시한 것이다.2 is a front view of a main body of a treadmill for a pet according to an embodiment of the present invention. FIG. 3 is a front view of the main body of the treadmill for a pet according to an embodiment of the present invention. FIG. 4 illustrates an electrical connection between configurations of a treadmill for a pet according to an embodiment of the present invention, and FIG. 5 6 is a flowchart illustrating an operation of a treadmill for a pet according to an exemplary embodiment of the present invention. Referring to FIG.
도 1 내지 도 6에 도시된 바와 같이, 본 발명의 일실시예에 따른 애완동물용 런닝머신(100)는 본체부(110)와 회전부(120)와 구동부(130)와 도어부(140)와 제어부(150)와 센서부(160)와 통신부(170)를 포함한다.1 to 6, a
본체부(110)는 후술하는 회전부(120)와 구동부(130)와 도어부(140)와 센서부(160)와 통신부(170)가 설치되는 공간을 제공하는 것으로써, 원통형으로 마련된다.The
회전부(120)는 상술한 본체부(110)에 설치되는 것으로써, 동물이 수용될 수 있는 수용공간(S)을 형성한다. 이러한 회전부(120)는 원통형으로 마련되는데, 후술하는 구동부(130)로부터 동력을 전달받아 회전함으로써, 수용공간(S)에 수용되는 동물이 운동할 수 있게 한다.The
회전부(120)의 바깥쪽 외면에는 원주방향을 따라 복수개의 기어가 형성되며, 이러한 기어는 구동부(130)의 구동기어(132)에 맞물린다. 따라서, 구동부(130)가 회전하게 되면, 회전부(120)가 회전된다. 그러나, 회전부(120)는 상술한 바와 같이 기어 타입에 의해 구동부(130)로부터 동력을 전달받는 것에 한정되는 것은 아니며, 밸트, 체인 타입 등 구동부(130)로부터 동력을 전달받을 수 있는 형태라면 어떠한 형태로 마련되더라도 무방하다.A plurality of gears are formed along the circumferential direction on the outer surface of the outer side of the
또한, 수용공간(S)을 형성하는 회전부(120)의 안쪽 외면에는 장애모듈(120a)이 탈부착 가능하게 설치될 수 있다. 이러한 장애모듈(120a)에 따르면, 동물의 운동시 동물의 운동량이 향상되는 효과가 있다.In addition, the
또한, 도면에는 도시되지 않았지만, 회전부(120)의 안쪽 외면에는 동물의 운동시 발바닥 면의 마찰력이 증대되도록 마찰층이 탈부착 가능하게 설치될 수 있다. 이러한 마찰층은 복수개의 돌기가 형성되는 매트, 인조잔디 등으로 마련될 수 있다.Although not shown in the drawing, a friction layer may be detachably installed on the inner surface of the
또한, 도면에는 도시되지 않았지만, 회전부(120)의 안쪽 외면에는 맥박센서가 설치될 수 있다. 이러한 맥박센서에 의해서, 수용공간(S)에 수용되는 동물의 맥박이 실시간으로 측정될 수 있고, 이러한 맥박센서에 의한 맥박정보는 제어부(150)를 통해 표시부(110b)에 표시될 수 있고, 통신부(170)를 통해 외부 단말기(180)로 전송될 수 있다.In addition, although not shown in the drawing, a pulse sensor may be installed on the inner surface of the
한편, 회전부(120)는 투명재질로 마련되는 경우, 회전부(120)와 본체부(110)의 사이에는 동물이 응시할 수 있는 화면부(미도시)가 설치될 수 있다. 이러한 화면부(미도시)는 후술하는 제어부(150)에 연결되어 동물이 좋아하는 음식 등의 영상을 표시할 수 있도록 마련될 수 있다.When the
구동부(130)는 상술한 회전부(120)에 동력을 제공하는 것으로써, 본체부(110)에 설치되며, 모터(131)와 구동기어(132)를 포함한다.The
모터(131)는 전력을 공급받아 회전하는 것으로써, 구동기어(132)가 단부에 결합된다. 이러한 모터(131)는 스테핑 모터(Stepping Motor) 또는 서보모터(Servo Motor) 등 수치제어가 가능한 모터로 마련될 수 있다. 이러한 모터(131)는 후술하는 제어부(150)에 의해 회전이 제어되도록 전기적으로 연결된다.The
구동기어(132)는 모터(131)의 단부에 연결되는 것으로써, 상술한 회전부(120)에 형성된 기어에 맞물리게 결합 된다.The
도어부(140)는 수용공간(S)의 일측면이 마감되도록 본체부(110)에 설치되는 것으로써, 동물이 수용공간(S)으로 인입되거나 동물이 수용공간(S)으로부터 인출될 수 있도록 수용공간(S)의 일측면을 개방한다.The
이러한 도어부(140)는 한쌍으로 마련되어 원통형의 본체부(110)의 양 개구부에 각각 회동 가능하게 설치된다. 이러한 도어부(140)는 수용공간(S)에 수용된 동물의 심리의 안정을 위해 투명한 재질로 마련되는 것이 바람직하다.The
도어부(140)는 도어부(140)의 개방, 폐쇄가 단말기(180)에 의해서 제어, 모니터링될 수 있도록 후술하는 제어부(150)에 전기적으로 연결될 수 있다.The
한편, 도면에는 도시되지 않았지만 도어부(140)에는 복수개의 관통홀이 형성될 수 있다. 이러한 관통홀에 의해서, 수용공간(S)에 수용된 동물의 울음 소리가 외부로 전달되거나 외부의 사용자의 음성이 수용공간(S)으로 전달됨으로써, 운동을 실시하고 있는 동물의 심리적 안정이 도모될 수 있고, 동물의 심리적 상태가 외부에서 모니터링될 수 있다.Although not shown in the drawing, a plurality of through holes may be formed in the
이러한 도어부(140)에 의하면, 동물이 수용공간(S)으로부터 이탈되는 것이 효과적으로 방지되기 때문에, 동물의 안전한 운동이 담보되는 효과가 있다.According to the
제어부(150)는 구동부(130)와 도어부(140)와 후술하는 센서부(160)와 통신부(170)에 전기적으로 연결되는 것으로써, 구동부(130)와 도어부(140)를 제어하며, 센서부(160)와 통신부(170)로부터 정보를 주고 받는다.The
이러한 제어부(150)는 마이크로컨트롤러유닛(MCU : Micro Controller Unit)으로 마련되어 각종 정보의 연산, 가공 등을 수행한다.The
보다 상세하게 제어부(150)는 본체부(110)에 부착된 조작반(110a)으로부터 정보를 입력받아 구동부(130)와 도어부(140)를 제어하며, 외부의 단말기(180)로부터 통신부(170)를 거쳐 전달되는 정보를 입력받아 구동부(130)와 도어부(140)를 제어한다. 또한, 제어부(150)는 센서부(160)로부터 회전정보를 전달받아 본체부(110)에 부착된 표시부(110b)에 표시하며, 통신부(170)의 통신연결 상태 등을 확인, 제어한다.The
또한, 제어부(150)에는 본체부(110)에 설치된 조작반(110a) 또는 외부 단말기(180)를 통해 수용되는 동물의 체중, 나이 등의 생체정보를 입력받고 후술하는 센서부(160)로부터 회전정보가 입력받아 수용공간(S)에 수용된 동물의 운동량, 칼로리 소모량 등을 실시간으로 연산하여 운동정보를 생성한다. 이러한 운동정보는 본체부(110)에 설치된 표시부(110b)에 표시되며, 후술하는 통신부(170)로 전달되어 외부 단말기(180)로 전송된다.The
또한, 도면에는 도시되지 않았지만, 본체부(110)에는 수용공간(S)의 CO2량을 측정하는 측정센서가 설치될 수 있고, 제어부(150)는 측정센서로부터 수용공간(S)의 CO2량에 대한 정보와 상술한 맥박센서로부터 맥박정보를 전달받아 수용공간(S)에 수용된 동물이 과도하게 운동 되었다고 판단하는 경우, 제어부(150)는 모터(131)를 비상정지시킬 수 있다.Further, though not shown, the
센서부(160)는 회전부(120)의 회전량을 측정하여 회전정보를 생성하는 것으로써, 회전부(120)에 설치되는 자성부(161)와 본체부(110)에 설치되는 자성확인부(162)를 포함한다.The
자성부(161)는 복수개로 마련되어 회전부(120)의 원주방향을 따라 설치되는 것으로써, 자성체로 마련된다.The plurality of
자성확인부(162)는 본체부(110)에 설치되는 것으로써, 자성부(161)에 마주되도록 설치된다. 회전부(120)가 회전하면, 회전부(120)에 설치된 자성부(161)가 회전되며, 이에 따라 자성부(161)가 자성확인부(162)가 설치된 지역을 통과하게 된다. 이러한 과정에서 자성확인부(162)는 기설정된 시간에 몇개의 자성부(161)가 통과하였는지를 연산하여 회전부(120)의 회전량을 측정한다. 상술한 과정을 통해 생성된 회전정보는 후술하는 통신부(170)로 전달된다.The magnetic
이러한 자성부(161)와 자성확인부(162)를 포함하는 센서부(160)에 따르면, 회전부(120)의 회전량을 통해 수용공간(S)에 수용된 동물의 주행거리가 사용자가 용이하게 모니터링될 수 있다.According to the
통신부(170)는 회전부(120)의 상태를 외부에서 모니터링할 수 있도록 회전정보를 전달받아 외부로 전달하며, 제어부(150)의 동작이 제어되도록 외부에서 전달받은 정보를 상기 제어부(150)로 전달하는 것으로써, 센서부(160)와 제어부(150)에 전기적으로 연결된다.The
이러한 통신부(170)는 외부 단말기(180)와 블루투스(Bluetooth), WiFi(Wireless Fidelity) 방식 등으로 연결될 수 있으나, 이에 반드시 제한되는 것은 아니며, 무선으로 정보를 전달할 수 있는 방식이라면 어떠한 것으로 마련 되더라도 무방하다.The
이러한 통신부(170)에 따르면, 사용자가 본체부(110)와 이격되어 있는 상태에서도 회전부(120)의 회전량, 도어부(140), 모터(131)의 제어상태 등이 사용자에게 모니터링 될 수 있을 뿐만 아니라, 도어부(140), 모터(131)가 원격으로 제어될 수 있어 제품 사용의 편의성이 크게 증대되는 효과가 있다.According to the
따라서, 본체부(110)와 회전부(120)와 구동부(130)와 도어부(140)와 제어부(150)와 센서부(160)와 통신부(170)를 포함하는 본 발명의 일실시예에 따른 애완동물용 런닝머신(100)에 따르면, 동물의 운동시 동물이 본체부(110)로부터 이탈되는 것이 효과적으로 방지된다. 이에 의해서, 동물을 보다 안전하게 산책, 운동시킬 수 있다.Accordingly, the present invention can be applied to a display device including the
본 발명의 권리범위는 상술한 실시예에 한정되는 것이 아니라 첨부된 특허청구범위 내에서 다양한 형태의 실시예로 구현될 수 있다. 특허청구범위에서 청구하는 본 발명의 요지를 벗어남이 없이 당해 발명이 속하는 기술 분야에서 통상의 지식을 가진 자라면 누구든지 변형 가능한 다양한 범위까지 본 발명의 청구범위 기재의 범위 내에 있는 것으로 본다.The scope of the present invention is not limited to the above-described embodiments, but may be embodied in various forms of embodiments within the scope of the appended claims. It will be understood by those skilled in the art that various changes in form and details may be made therein without departing from the spirit and scope of the present invention as defined by the appended claims.
100 : 본 발명의 일실시예에 따른 애완동물용 런닝머신
110 : 본체부
110a : 조작반
110b : 표시부
120 : 회전부
120a : 장애모듈
130 : 구동부
131 : 모터
132 : 구동기어
140 : 도어부
150 : 제어부
160 : 센서부
161 : 자성부
162 : 자성확인부
170 : 통신부
180 : 단말기
S : 수용공간100: a treadmill for a pet according to an embodiment of the present invention
110:
110a:
110b:
120:
120a: failure module
130:
131: Motor
132: drive gear
140:
150:
160:
161:
162:
170:
180:
S: accommodation space
Claims (5)
Translated fromKorean동물이 수용될 수 있는 수용공간을 형성하며, 상기 본체부에 회전가능하게 설치되는 회전부;
상기 회전부에 동력을 제공하는 구동부; 및
상기 수용공간의 일측면이 마감되도록 상기 본체부에 설치되며, 상기 동물이 상기 수용공간으로 인입되거나 상기 동물이 상기 수용공간으로부터 인출될 수 있도록 상기 수용공간의 일측면을 개방하는 도어부를 포함하는 애완동물용 런닝머신.A body portion;
A rotatable portion rotatably installed in the main body portion to form an accommodation space in which the animal can be accommodated;
A driving unit for providing power to the rotating unit; And
And a door portion that is installed in the main body portion so that one side of the accommodation space is closed and opens one side of the accommodation space so that the animal can be drawn into the accommodation space or the animal can be drawn out from the accommodation space, Animal treadmill.
상기 회전부는,
상면에 장애모듈이 설치되는 것을 특징으로 하는 애완동물용 런닝머신.The method according to claim 1,
The rotation unit includes:
Wherein the obstacle module is installed on the upper surface.
상기 구동부를 제어하는 제어부;
상기 회전부의 회전량을 측정하여 회전정보를 생성하는 센서부; 및
상기 회전부의 상태를 외부에서 모니터링할 수 있도록 상기 회전정보를 전달받아 외부로 전달하며, 상기 제어부의 동작이 제어되도록 외부에서 전달받은 정보를 상기 제어부로 전달하는 통신부를 더 포함하는 애완동물용 런닝머신.The method according to claim 1,
A control unit for controlling the driving unit;
A sensor unit for measuring the rotation amount of the rotation unit and generating rotation information; And
Further comprising a communication unit for transmitting the rotation information to the outside so as to monitor the state of the rotation unit from the outside and transmitting the information received from outside to the outside so that the operation of the control unit is controlled, .
상기 센서부는,
한쌍으로 마련되어 상기 회전부와 상기 본체부에 각각 설치되며, 자성을 이용하여 상기 회전량을 측정하는 것을 특징으로 하는 애완동물용 런닝머신.The method of claim 3,
The sensor unit includes:
And the rotation amount of the pawl is measured using magnetic force, the pair of pawls being provided to the rotating part and the main body part, respectively.
상기 통신부로부터 상기 회전정보를 전달받아 화면에 표시하는 단말기를 더 포함하는 애완동물용 런닝머신.
The method of claim 3,
And a terminal for receiving the rotation information from the communication unit and displaying the received rotation information on a screen.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160088460AKR101837630B1 (en) | 2016-07-13 | 2016-07-13 | Running exerciser for a pet |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160088460AKR101837630B1 (en) | 2016-07-13 | 2016-07-13 | Running exerciser for a pet |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20180007446Atrue KR20180007446A (en) | 2018-01-23 |
| KR101837630B1 KR101837630B1 (en) | 2018-03-12 |
Family
ID=61071049
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160088460AExpired - Fee RelatedKR101837630B1 (en) | 2016-07-13 | 2016-07-13 | Running exerciser for a pet |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101837630B1 (en) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101988519B1 (en)* | 2019-02-15 | 2019-06-12 | 한국코스믹라운드(주) | Treadmill for pet |
| WO2019189973A1 (en)* | 2018-03-28 | 2019-10-03 | 한국코스믹라운드(주) | Pet treadmills |
| KR20190131165A (en)* | 2018-05-16 | 2019-11-26 | 한국코스믹라운드(주) | Automatic speed control type smart pet treadmill |
| KR20200008652A (en)* | 2020-01-17 | 2020-01-28 | 김대용 | Exercise apparatus for pet |
| KR20200018549A (en)* | 2020-02-12 | 2020-02-19 | 김대용 | Exercise apparatus for pet |
| KR102091333B1 (en)* | 2018-09-13 | 2020-03-19 | 김대용 | Exercise apparatus for pet |
| KR200491245Y1 (en)* | 2019-05-02 | 2020-04-24 | 한국코스믹라운드(주) | Treadmill for pet |
| KR20210099830A (en)* | 2020-02-05 | 2021-08-13 | 강정수 | Exercise apparatus for pet |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102255488B1 (en) | 2017-10-31 | 2021-05-24 | 황지현 | A treadmill for pet |
| KR102393226B1 (en) | 2019-11-19 | 2022-05-02 | 김수현 | pet underwater running machine |
| US20210161101A1 (en)* | 2019-12-02 | 2021-06-03 | The Animal Doctor, Ltd. | Combined human and pet wellness facility |
| KR20210090025A (en) | 2020-01-09 | 2021-07-19 | 김수현 | Pet underwater running machine |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006129825A (en)* | 2004-11-09 | 2006-05-25 | Toshiba Corp | Pet runner |
- 2016
- 2016-07-13KRKR1020160088460Apatent/KR101837630B1/ennot_activeExpired - Fee Related
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019189973A1 (en)* | 2018-03-28 | 2019-10-03 | 한국코스믹라운드(주) | Pet treadmills |
| KR20190131165A (en)* | 2018-05-16 | 2019-11-26 | 한국코스믹라운드(주) | Automatic speed control type smart pet treadmill |
| KR102091333B1 (en)* | 2018-09-13 | 2020-03-19 | 김대용 | Exercise apparatus for pet |
| KR101988519B1 (en)* | 2019-02-15 | 2019-06-12 | 한국코스믹라운드(주) | Treadmill for pet |
| WO2020166982A1 (en)* | 2019-02-15 | 2020-08-20 | 한국코스믹라운드(주) | Pet treadmill |
| CN113473846A (en)* | 2019-02-15 | 2021-10-01 | 科斯美劳德韩国有限公司 | Running machine for pet |
| JP2022519871A (en)* | 2019-02-15 | 2022-03-25 | コスミック ラウンド コリア カンパニー,リミテッド | Pet treadmill |
| KR200491245Y1 (en)* | 2019-05-02 | 2020-04-24 | 한국코스믹라운드(주) | Treadmill for pet |
| KR20200008652A (en)* | 2020-01-17 | 2020-01-28 | 김대용 | Exercise apparatus for pet |
| KR20210099830A (en)* | 2020-02-05 | 2021-08-13 | 강정수 | Exercise apparatus for pet |
| KR20200018549A (en)* | 2020-02-12 | 2020-02-19 | 김대용 | Exercise apparatus for pet |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101837630B1 (en) | 2018-03-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101837630B1 (en) | Running exerciser for a pet | |
| US12059591B2 (en) | Bendable sensor device for monitoring joint extension and flexion | |
| JP6429798B2 (en) | Medical rehabilitation lift system and method using horizontal and vertical force detection and motion control | |
| KR101487391B1 (en) | Health Management System Using the Wireless Jump Rope Apparatus | |
| WO2018224967A1 (en) | Assisted rehabilitation system | |
| KR101361117B1 (en) | Jump Lope for Exercise Management using Biometric information, and Method Using the Same | |
| US20230218947A1 (en) | System and method for targeted neurological therapy using brainwave entrainment with passive treatment | |
| US20240001193A1 (en) | System and method for targeted neurological therapy using brainwave entrainment with passive treatment | |
| US20170087437A1 (en) | Exercising pacing device and methods of operation | |
| US12053670B2 (en) | System and method for targeted neurological therapy using brainwave entrainment | |
| CN204092925U (en) | A kind of Multifunction skipping rope machine | |
| US20240350036A1 (en) | Method for estimating walking index of user and electronic device and wearable device for performing same | |
| KR20160065601A (en) | Exercise therapy rehabilitation system for developmental disabilities | |
| KR102814708B1 (en) | Itneraction method betwwen wearable device and electronic device, and the wearable device and the electronic device performing the same | |
| KR102699651B1 (en) | Wearable device for providing lighting function and operation method thereof | |
| US20250076383A1 (en) | Method of determining state of three-phase motor and electronic device for performing the method | |
| KR20160129451A (en) | Apparatus of exercise medical therapy for active type | |
| KR20250003047A (en) | Method of outputting message and electronic device performing the method | |
| US20250009588A1 (en) | Haptic feedback control method of controlling haptic feedback of wearable device, wearable device and electronic device for performing the same | |
| KR102725149B1 (en) | Wearable device for providing wear detection function and operation method thereof | |
| KR102625749B1 (en) | Method for estimating gait index of user, and wearable device and electronic device performing the same | |
| US12374917B2 (en) | Wearable apparatus for performing wireless power transmission and wireless communication and operating method thereof | |
| KR102726613B1 (en) | Wearable apparatus and electronic apparatus providing feedback to user | |
| KR102711684B1 (en) | Method for controlling wearable apparatus for user's safety and wearable apparatus performing the same | |
| EP4552629A1 (en) | Wearable device for providing lighting function, and wearable device operating method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application | St.27 status event code:A-0-1-A10-A12-nap-PA0109 | |
| PA0201 | Request for examination | St.27 status event code:A-1-2-D10-D11-exm-PA0201 | |
| D13-X000 | Search requested | St.27 status event code:A-1-2-D10-D13-srh-X000 | |
| D14-X000 | Search report completed | St.27 status event code:A-1-2-D10-D14-srh-X000 | |
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection | St.27 status event code:A-1-2-D10-D21-exm-PE0902 | |
| E13-X000 | Pre-grant limitation requested | St.27 status event code:A-2-3-E10-E13-lim-X000 | |
| P11-X000 | Amendment of application requested | St.27 status event code:A-2-2-P10-P11-nap-X000 | |
| P13-X000 | Application amended | St.27 status event code:A-2-2-P10-P13-nap-X000 | |
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration | St.27 status event code:A-1-2-D10-D22-exm-PE0701 | |
| PG1501 | Laying open of application | St.27 status event code:A-1-1-Q10-Q12-nap-PG1501 | |
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment | St.27 status event code:A-2-4-F10-F11-exm-PR0701 | |
| PR1002 | Payment of registration fee | St.27 status event code:A-2-2-U10-U11-oth-PR1002 Fee payment year number:1 | |
| PG1601 | Publication of registration | St.27 status event code:A-4-4-Q10-Q13-nap-PG1601 | |
| PN2301 | Change of applicant | St.27 status event code:A-5-5-R10-R11-asn-PN2301 | |
| PN2301 | Change of applicant | St.27 status event code:A-5-5-R10-R14-asn-PN2301 | |
| PR1001 | Payment of annual fee | St.27 status event code:A-4-4-U10-U11-oth-PR1001 Fee payment year number:4 | |
| PC1903 | Unpaid annual fee | St.27 status event code:A-4-4-U10-U13-oth-PC1903 Not in force date:20220307 Payment event data comment text:Termination Category : DEFAULT_OF_REGISTRATION_FEE | |
| PC1903 | Unpaid annual fee | St.27 status event code:N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text:Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date:20220307 | |
| R18-X000 | Changes to party contact information recorded | St.27 status event code:A-5-5-R10-R18-oth-X000 |