KR20150066303A - Apparatus and method for autonomous driving using driving pattern of driver - Google Patents
Apparatus and method for autonomous driving using driving pattern of driverDownload PDFInfo
- Publication number
- KR20150066303A KR20150066303AKR1020130151685AKR20130151685AKR20150066303AKR 20150066303 AKR20150066303 AKR 20150066303AKR 1020130151685 AKR1020130151685 AKR 1020130151685AKR 20130151685 AKR20130151685 AKR 20130151685AKR 20150066303 AKR20150066303 AKR 20150066303A
- Authority
- KR
- South Korea
- Prior art keywords
- driving
- driver
- autonomous
- vehicle
- travel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 238000000034methodMethods0.000titleabstractdescription15
- 230000006399behaviorEffects0.000description25
- 238000010586diagramMethods0.000description15
- 230000002787reinforcementEffects0.000description14
- 230000006870functionEffects0.000description12
- 230000001133accelerationEffects0.000description9
- 238000004422calculation algorithmMethods0.000description9
- 230000009471actionEffects0.000description7
- 238000004891communicationMethods0.000description3
- 230000008859changeEffects0.000description2
- 239000000470constituentSubstances0.000description2
- 239000000284extractSubstances0.000description2
- 125000002066L-histidyl groupChemical group[H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H]0.000description1
- 230000002567autonomic effectEffects0.000description1
- 238000004364calculation methodMethods0.000description1
- 238000009795derivationMethods0.000description1
- 230000003993interactionEffects0.000description1
- 238000004519manufacturing processMethods0.000description1
- 238000013507mappingMethods0.000description1
- 238000012986modificationMethods0.000description1
- 230000004048modificationEffects0.000description1
- 230000008569processEffects0.000description1
- 238000010845search algorithmMethods0.000description1
Images










Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
- B60W40/09—Driving style or behaviour
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/10—Path keeping
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Mathematical Physics (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Traffic Control Systems (AREA)
Abstract
Translated fromKoreanDescription
Translated fromKorean본 발명은 운전자의 주행 패턴을 반영하는 자율 주행 장치 및 그 방법에 관한 것으로, 보다 자세하게는 운전자의 조작으로 학습된 주행 패턴을 반영하여 운전자의 의도와 동일하게 자율 주행이 수행되도록 하는 운전자의 주행 패턴을 반영하는 자율 주행 장치 및 그 방법에 관한 것이다.The present invention relates to an autonomous travel apparatus that reflects a driving pattern of a driver and a method thereof. More particularly, the present invention relates to an autonomous travel apparatus that reflects a travel pattern learned by an operation of a driver, The present invention relates to an autonomous navigation apparatus and a method thereof.
현재 상용화되고 있는 운전자보조시스템들과 연구중인 일부 무인 자율주행시스템은 부분적인 기능에 대해서만 보조기능(ACC-Adaptive Cruise Control, LDWS-Lane Departure Warning System, LKAS-Lane Keeping Assistance System)을 제공하거나 주위주행환경에 매우 보수적이고, 정해진 틀에 의해 수동적으로 자율주행을 제공해 왔다.Currently, commercial assistant systems and some unmanned autonomous navigation systems under study provide ACC-Adaptive Cruise Control (LDWS-Lane Departure Warning System) only for partial functions, It has been very conservative in its environment, and has been autonomously driven by a defined framework.
운전자보조시스템의 경우, 운전자가 항상 개입해야 하는 제약조건이 있고, 현재시점의 무인 자율주행시스템은 실제 운전자의 주행 패턴과는 거리가 있는 한계점이 있었다. 따라서, 이러한 운전자보조시스템 및 무인 자율주행시스템은 불확실성이 매우 크고, 예측이 불가능한 실제 도로환경에서 발생 가능한 모든 변수를 고려하는 것을 불가능하다는 문제점이 있었다.In the case of the driver assistance system, there is a restriction that the driver must intervene at all times, and the unmanned autonomous navigation system at present has a limit in distance from the actual driver's driving pattern. Therefore, such driver assistance systems and unmanned autonomous navigation systems have a problem that it is impossible to consider all the possible variables in an actual road environment where the uncertainty is very large and can not be predicted.
이와 관련하여, 한국공개특허 제2010-0005362호는 "자율주행 제어 시스템"을 개시하고 있다.In this regard, Korean Patent Publication No. 2010-0005362 discloses an "autonomous drive control system ".
본 발명은 상기와 같은 문제점을 해결하기 위해 발명된 것으로서, 운전자의 조작으로 학습된 주행 패턴을 반영하여 운전자의 의도와 동일하게 자율 주행이 수행되도록 하는 운전자의 주행 패턴을 반영하는 자율 주행 장치 및 그 방법을 제공하는데 그 목적이 있다.SUMMARY OF THE INVENTION The present invention has been made to solve the above-mentioned problems, and it is an object of the present invention to provide an autonomous travel apparatus that reflects a travel pattern of a driver, which reflects a travel pattern learned by a driver's operation, The purpose of the method is to provide.
상기한 목적을 달성하기 위하여 본 발명의 실시예에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치는 자율 주행중인 차량의 주행 환경 정보를 수집하는 주행 환경 정보 수집부; 수집되는 주행 환경 정보를 토대로 인지된 주행 상황과 운전자의 조작으로 학습된 주행 패턴을 반영하여 상기 차량의 주행 행동을 결정하고 판단하는 자율 주행 판단부; 및 결정된 주행 행동을 토대로 지역경로를 설정하고, 설정된 지역경로를 토대로 상기 차량의 구동부를 제어하여 자율 주행을 수행하는 자율 주행 제어부;를 포함하는 것을 특징으로 한다.According to an aspect of the present invention, there is provided an autonomous mobile device that reflects a driving pattern of a driver according to an embodiment of the present invention includes a traveling environment information collecting unit for collecting traveling environment information of a self-traveling vehicle; An autonomous travel determiner for determining and determining a traveling behavior of the vehicle based on the recognized travel conditions and the travel patterns learned by the operation of the driver based on the travel environment information to be collected; And an autonomous driving controller for setting a local route based on the determined driving behavior and controlling the driving portion of the vehicle based on the set local route to perform autonomous driving.
상기와 같은 구성을 갖는 본 발명에 의한 운전자의 주행 패턴을 반영하는 자율 주행 장치 및 그 방법은 운전자의 조작으로 학습된 주행 패턴을 반영하여 운전자의 의도와 동일하게 자율 주행이 수행되도록 함으로써, 보다 안정적으로 최적의 자율 주행을 가능하게 하는 효과가 있다.The autonomous travel apparatus reflecting the driving pattern of the driver according to the present invention having the above-described configuration and the method thereof can reflect autonomous travel in the same manner as the driver's intention by reflecting the travel pattern learned by the operation of the driver, So that an optimum autonomous travel can be achieved.
또한, 본 발명은 운전자 개개인의 주행 패턴을 반영할 수 있어 개개인에 적합한 자율 주행을 제공할 수 있는 효과가 있다.In addition, the present invention can reflect the driving pattern of each driver, thereby providing an autonomous driving suitable for each individual.
도 1은 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치의 구성을 설명하기 위한 도면이다.
도 2는 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치에 채용되는 주행 환경 정보 수집부의 세부 구성을 설명하기 위한 도면이다.
도 3은 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치에 채용되는 자율 주행 판단부의 세부 구성을 설명하기 위한 도면이다.
도 4는 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치에 채용되는 자율 주행 제어부의 세부 구성을 설명하기 위한 도면이다.
도 5a은 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치에 적용되는 주행 환경을 설명하기 위한 도면이다.
도 5b는 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치에 적용되는 주행 가능한 행동을 설명하기 위한 도면이다.
도 6은 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치에 적용되는 운전자의 주행 패턴 학습을 설명하기 위한 도면이다.
도 7은 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치에 적용되는 운전자의 주행 패턴에 따른 추상적 학습시스템 구조를 설명하기 위한 도면이다.
도 8은 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치에 적용되는 운전자의 주행 패턴에 따른 구체적 학습시스템 구조를 설명하기 위한 도면이다.
도 9는 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치에 적용되는 운전자의 주행 패턴에 따른 학습시스템의 그래프 모델을 설명하기 위한 도면이다.
도 10은 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치에 적용되는 운전자의 조작으로 학습된 주행 패턴이 학습되기 전(a)과 후(b)를 설명하기 위한 도면이다.
도 11은 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 방법을 설명하기 위한 도면이다.1 is a view for explaining a configuration of an autonomous travel apparatus that reflects a driving pattern of a driver according to the present invention.
2 is a diagram for explaining a detailed configuration of a travel environment information collecting unit employed in an autonomous travel apparatus that reflects a driving pattern of a driver according to the present invention.
3 is a view for explaining a detailed configuration of an autonomous travel determiner employed in an autonomous travel apparatus that reflects a driving pattern of a driver according to the present invention.
4 is a diagram for explaining a detailed configuration of an autonomous drive control unit employed in an autonomous drive apparatus that reflects a driving pattern of a driver according to the present invention.
FIG. 5A is a diagram for explaining a driving environment applied to an autonomous vehicle that reflects a driving pattern of a driver according to the present invention. FIG.
FIG. 5B is a diagram for explaining a possible driving action applied to an autonomous travel apparatus that reflects a driving pattern of a driver according to the present invention. FIG.
6 is a diagram for explaining a driving pattern learning of a driver applied to an autonomous travel apparatus that reflects a driving pattern of a driver according to the present invention.
7 is a view for explaining the structure of an abstract learning system according to a driving pattern of a driver applied to an autonomous driving apparatus that reflects a driving pattern of a driver according to the present invention.
8 is a diagram for explaining a concrete learning system structure according to a driving pattern of a driver applied to an autonomous travel apparatus that reflects a driving pattern of a driver according to the present invention.
9 is a diagram for explaining a graph model of a learning system according to a driving pattern of a driver, which is applied to an autonomous navigation apparatus that reflects a driving pattern of a driver according to the present invention.
FIG. 10 is a diagram for explaining (a) and (b) before the learned travel pattern is learned by the operation of the driver applied to the autonomous travel apparatus that reflects the driving pattern of the driver according to the present invention.
11 is a view for explaining an autonomous driving method that reflects a driving pattern of a driver according to the present invention.
이하, 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자가 본 발명의 기술적 사상을 용이하게 실시할 수 있을 정도로 상세히 설명하기 위하여, 본 발명의 가장 바람직한 실시예를 첨부 도면을 참조하여 설명하기로 한다. 우선, 각 도면의 구성요소들에 참조부호를 부가함에 있어서, 동일한 구성요소들에 대해서는 비록 다른 도면상에 출력되더라도 가능한 한 동일한 부호를 가지도록 하고 있음에 유의해야 한다. 또한, 본 발명을 설명함에 있어, 관련된 공지 구성 또는 기능에 대한 구체적인 설명이 본 발명의 요지를 흐릴 수 있다고 판단되는 경우에는 그 상세한 설명은 생략한다.
DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTS Hereinafter, preferred embodiments of the present invention will be described in detail with reference to the accompanying drawings in order to facilitate a person skilled in the art to easily carry out the technical idea of the present invention. . First, in adding reference numerals to the constituent elements of the drawings, it should be noted that the same constituent elements are denoted by the same reference numerals whenever possible even if they are displayed on other drawings. In the following description of the present invention, a detailed description of known functions and configurations incorporated herein will be omitted when it may make the subject matter of the present invention rather unclear.
이하에서는, 본 발명의 실시예에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치 및 그 방법에 대하여 첨부된 도면을 참고로 하여 상세히 설명한다.
Hereinafter, an autonomous navigation apparatus and method for reflecting a driving pattern of a driver according to an embodiment of the present invention will be described in detail with reference to the accompanying drawings.
도 1은 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치의 구성을 설명하기 위한 도면이다.1 is a view for explaining a configuration of an autonomous travel apparatus that reflects a driving pattern of a driver according to the present invention.
도 1을 참조하여 설명하면, 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치(100)는 크게 주행 환경 정보 수집부(110), 자율 주행 판단부(120) 및 자율 주행 제어부(130)를 포함한다.1, an autonomous
주행 환경 정보 수집부(110)는 자율 주행중인 차량의 주행 환경 정보를 수집한다. 이때, 차량에 구비된 GPS/INS 센서(120)와 스티어링 휠 앵글 센서(Steering wheel angle sensor), 인코더(encoder) 및 주행 거리계(odometer) 등을 센싱하는 차량 내부 센서(30)를 통해 차량의 위치 정보를 수집하고, 라이더(Lidar,40), 카메라(Camera,50), 초음파(Ultrasonic,60) 및 레이더(Radar,70) 등을 포함하는 차량 외부 센서와 차량 대 인프라 간 통신(V2x,80)을 통해 차량의 주행 환경 정보를 수집한다.The traveling environment
자율 주행 판단부(120)는 수집되는 주행 환경 정보를 토대로 인지된 주행 상황과 운전자의 조작(조향각 조작, 엑셀 조작, 브레이크 조작 등)으로 학습된 주행 패턴을 반영하여 차량의 주행 행동을 결정하고 판단한다. 자율 주행 판단부(120)는 주행 상황을 8가지 영역(전방 동선 차량 객체, 전방 좌측 차량 객체, 전방 우측 차량 객체, 측방 우측 차량 객체, 측방 좌측 차량 객체, 후방 좌측 차량 객체 및 후방 동성 차량 객체)으로 나누어 독립적으로 처리하도록 하며, 그에 따른 주행 행동 판단에 정보를 제공하는 역할을 한다.The autonomous-travel determiner 120 determines the driving behavior of the vehicle based on the recognized driving situation and the driving pattern learned by the operation of the driver (steering angle manipulation, Excel manipulation, break manipulation, etc.) based on the collected driving environment information, do. The autonomous-
자율 주행 제어부(130)는 결정된 주행 행동을 토대로 지역경로를 설정하고, 설정된 지역경로를 토대로 차량의 구동부를 제어하여 자율 주행을 수행한다.
The autonomous
도 2는 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치에 채용되는 주행 환경 정보 수집부의 세부 구성을 설명하기 위한 도면이다.2 is a diagram for explaining a detailed configuration of a travel environment information collecting unit employed in an autonomous travel apparatus that reflects a driving pattern of a driver according to the present invention.
도 2를 참조하여 설명하면, 본 발명에 따른 주행 환경 정보 수집부(110)는 자율 주행중인 차량의 주행 환경 정보를 수집한다.Referring to FIG. 2, the travel environment
이를 위해, 주행 환경 정보 수집부(110)는 맵 제공부(111), 위치 정보 수집부(113) 및 주행 정보 수집부(115)를 포함한다.The traveling environment
맵 제공부(111)는 위치 정보를 수집하는 위치 정보 수집부(113)와 맵 데이터부(10)가 연동되어 정확한 위치와 맵 정보를 동시에 제공한다. 맵 제공부(111)로부터 제공되는 맵 정보를 토대로 현재 위치에서 목표 지점까지 경로를 탐색하기 위해 전역 경로 계획부(도면 미도시)를 통해 전역 경로를 설정할 수 있다.The map
위치 정보 수집부(113)는 GPS/INS센서와 스티어링 휠 앵글 센서(Steering wheel angle sensor), 인코더(encoder) 및 주행 거리계(odometer)등을 센싱하는 차량 내부 센서(In-vehicle info.,30)를 통해 차량의 위치 정보를 수집한다.The position
주행 정보 수집부(115)는 라이더(Lidar,40), 카메라(Camera,50), 초음파(Ultrasonic,60) 및 레이더(Radar,70) 등을 포함하는 차량 외부 센서와 차량 대 인프라 간 통신(V2x,80) 통신 정보를 통해 차량의 주행 환경 정보를 수집한다.
The travel
도 3은 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치에 채용되는 자율 주행 판단부의 세부 구성을 설명하기 위한 도면이다.3 is a view for explaining a detailed configuration of an autonomous travel determiner employed in an autonomous travel apparatus that reflects a driving pattern of a driver according to the present invention.
도 3을 참조하여 설명하면, 본 발명에 따른 자율 주행 판단부(120)는 수집되는 주행 환경 정보를 토대로 인지된 주행 상황과 운전자의 조작으로 학습된 주행 패턴을 반영하여 차량의 주행 행동을 결정하고 판단한다.3, the autonomous-
이를 위해, 자율 주행 판단부(120)는 주행 상황 인지부(121), 정보 로깅부(123), 정보 저장부(125), 운전자 주행 학습부(127) 및 주행 행동 결정부(129)를 포함한다.The autonomic
주행 상황 인지부(121)는 수집된 주행 환경 정보를 토대로 차량의 주행 상황을 인지한다. 이때, 주행 상황 인지부(121)는 주행 중인 차량을 중심으로 크게 전방, 좌우 측방 및 후방으로 나누고 세부적으로는 전방 동선 차량 객체, 전방 좌측 차량 객체, 전방 우측 차량 객체, 측방 우측 차량 객체, 측방 좌측 차량 객체, 후방 좌측 차량 객체 및 후방 동성 차량 객체로 구분되는 8가지 영역 중 어느 하나로 차량의 주행 상황을 인지할 수 있다.The driving
정보 로깅부(123)는 인지된 주행 상황에서 학습에 쓰일 수 있는 정보를 수집한다. 정보 로깅부(123)는 가능한 많은 종류, 많은 양의 정보를 수집하고 추후에 학습에 필요한 특징만을 추출한다.The
정보 저장부(125)는 정보 로깅부에서 필요한 특징만을 추출한 정보를 파일로 저장하여 보관한다.The
운전자 주행 학습부(127)는 조향각 조작, 엑셀 조작 및 브레이크 조작 등과 같은 운전자 조작으로부터 주행 패턴을 학습한다. 운전자 주행 학습부(127)는 운전자 조작이 필요 없을 때까지 주행 패턴을 반복 학습한다. 학습 방법으로는 강화 학습이 이용될 수 있다. 강화 학습이란, 어떤 환경을 탐색하는 에이전트가 현재의 상태를 인식하여 어떤 행동을 취하면 그 에이전트는 환경으로부터 포상을 얻게 된다. 강화 학습의 알고리즘은 그 에이전트가 앞으로 누적될 포상을 최대화하는 일련의 행동으로 정의되는 정책을 찾는 방법이다. 즉, 운전자 주행 학습부(127)는 강화 학습을 적용하여 기존의 자율 주행에서 운전자에 의해 옳은 주행을 했을 때 포상을 주고, 옳지 않은 주행을 하면 패널티를 주는 형태로 운전자가 개선하고 싶은 행동에 대해 조작을 가함으로써, 운전자의 주행 패턴과 의도에 맞게 학습 되도록 한다.The driver driving
주행 행동 결정부(129)는 인지된 주행 상황과 운전자의 조작으로 학습된 주행 패턴을 반영하여 차량의 주행 행동을 결정한다. 이때, 주행 행동 결정부(129)는 차선을 유지하면서 가속, 정속 및 감속하거나 왼쪽 차선으로 이동하면서 가속, 정속 및 감속 그리고 오른쪽 차선으로 이동하면서 가속, 정속 및 감속으로 구분되는 9가지 행동 중 어느 하나로 차량의 주행 행동을 결정할 수 있다.
The driving
도 4는 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치에 채용되는 자율 주행 제어부의 세부 구성을 설명하기 위한 도면이다.4 is a diagram for explaining a detailed configuration of an autonomous drive control unit employed in an autonomous drive apparatus that reflects a driving pattern of a driver according to the present invention.
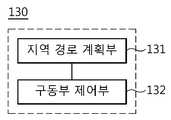
도 4를 참조하여 설명하면, 본 발명에 따른 자율 주행 제어부(130)는 결정된 주행 행동을 토대로 지역경로를 설정하고, 설정된 지역경로를 토대로 차량의 구동부를 제어하여 자율 주행을 수행한다.Referring to FIG. 4, the autonomous
이를 위해, 자율 주행 제어부(130)는 지역 경로 계획부(131) 및 구동부 제어부(132)를 포함한다.To this end, the autonomous
지역 경로 계획부(131)는 판단된 차량의 주행 행동을 토대로 차량의 지역 경로를 생성한다. 이때, 지역 경로 계획부(131)는 A*파생 알고리즘인 D*, Hybrid A* 알고리즘, Smooth curve생성 알고리즘인 Spline Curve, Bezier Curve 알고리즘, 랜덤서치 알고리즘인 RRT 알고리즘 등을 이용하여 지역 경로를 설정할 수 있다.The local
구동부 제어부(132)는 생성된 차량의 지역 경로를 토대로 차량의 자율 주행이 가능하도록 조향각, 엑셀 및 브레이크와 같은 차량의 구동부를 제어한다. 이때, 구동부 제어부(132)는 PID 제어, 선형제어의 LQR, LQG, 그리고 비선형제어 등을 이용하여 차량의 구동부를 제어할 수 있다.
The driving
도 5a은 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치에 적용되는 주행 환경을 설명하기 위한 도면이고, 도 5b는 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치에 적용되는 주행 가능한 행동을 설명하기 위한 도면이다.FIG. 5A is a view for explaining a driving environment applied to an autonomous travel apparatus that reflects a driving pattern of a driver according to the present invention, FIG. 5B is a view for explaining a driving route applied to an autonomous travel apparatus that reflects a driving pattern of a driver according to the present invention This figure is for explaining possible actions.
도 5a를 참조하여 설명하면, 본 발명은 주행 환경을 현재 주행중인 차선, 왼쪽 차선 및 오른쪽 차선으로 구분하고, 각 차선의 간격은 차량의 현재 속도에 따라 길어지고 좁아질 수 있다. 이러한, 주행 환경에서의 주행 환경 인지 정보는 낮은 레벨의 센서 정보를 바탕으로 하며, 각종 센서를 통한 정보(GPS/INS, Radar, Lidar, Camera, In-vehicle information)뿐 아니라, 인프라로부터 오는 정보(V2X-V2V,V2I) 모두를 포함하고, 실제로는 차량의 주변차량의 위치, 속도, 헤딩 등 주행상황을 파악할 수 있는 정보로 변환되어 사용한다. 또한, 차량의 현재 속도 및 현재 주행도로의 제한 속도도 주행상황 상태에 포함될 수 있다. 그 이유는 현재 속도에 따라 운전자 주행패턴이 다르고 현재 속도와 제한 속도의 관계에 따라서도 달라지기 때문이다.Referring to FIG. 5A, the present invention divides the driving environment into a lane, a left lane, and a right lane that are currently running, and the interval of each lane can be lengthened and narrowed according to the current speed of the vehicle. The driving environment recognition information in the driving environment is based on low-level sensor information, and information (GPS / INS, Radar, Lidar, Camera, In-vehicle information) V2X-V2V, V2I), and is actually converted into information that can be used to grasp the driving situation such as the position, speed, and heading of the vehicle around the vehicle. In addition, the current speed of the vehicle and the speed limit of the current driving road may also be included in the driving situation state. This is because the driver's driving pattern is different according to the current speed, and also depends on the relationship between the current speed and the speed limit.
도 5b를 참조하여 설명하면, 본 발명은 주행 가능한 행동을 도면에 도시된 바와 같이 크게 9가지로 구분할 수 있다. 주행 행동은 차선을 유지하면서 가속, 정속 및 감속, 왼쪽차선으로 이동하면서 가속, 정속 및 감속, 그리고 오른쪽차선으로 이동하면서 가속, 정속, 감속으로 구분될 수 있다.Referring to FIG. 5B, the present invention can classify nine types of possible behaviors as shown in the figure. Driving behavior can be divided into acceleration, constant speed and deceleration while maintaining the lane, acceleration, constant speed and deceleration while moving to the left lane, and acceleration, constant speed and deceleration while moving to the right lane.
따라서, 본 발명은 주행 상황 인지를 각 분산된 부분을 독립적인 객체가 담당하도록 하며, 각 객체는 담당 부분에 대해서만 주행 상황을 인지하도록 한다. 즉, 차량의 주행 환경을 도 5a에 도시된 바와 같이 8가지 상황으로 분리하고, 각 도로영역에 대해 독립적인 객체를 할당하고 각 객체는 할당된 부분에 대해서는 주행 상황을 인지한다. 이와 같이 각 객체는 독립적으로 할당된 부분만 인식하여 계산량을 줄일 수 있다.
Therefore, in the present invention, each distributed object is managed by an independent object, and each object perceives the driving situation only for a responsible part. That is, the traveling environment of the vehicle is divided into eight situations as shown in FIG. 5A, and an independent object is allocated to each road area, and each object recognizes the running situation with respect to the allocated part. In this way, each object recognizes only the allocated parts independently, thereby reducing the amount of calculation.
도 6은 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치에 적용되는 운전자의 주행 패턴 학습을 설명하기 위한 도면이다.6 is a diagram for explaining a driving pattern learning of a driver applied to an autonomous travel apparatus that reflects a driving pattern of a driver according to the present invention.
도 6을 참조하여 설명하면, 본 발명에서는 포상에 대한 개념을 운전자의 주행 패턴 즉, 운전자의 개입으로 정의한다. 주행 학습은 같은 구간(출발 지점과 도착지점이 동일)을 반복하는 것으로 하되, 주행 상황은 랜덤 하게 한다. 같은 구간을 반복하는 이유는 내비게이션에 대한 부하를 줄이기 위함이지 반드시 같은 구간을 반복할 필요는 없다.Referring to FIG. 6, in the present invention, the concept of award is defined as a driving pattern of the driver, that is, the driver's intervention. Driving learning should be repeated in the same section (same starting point and destination point), but the driving situation should be random. The reason for repeating the same section is to reduce the load on navigation, not necessarily the same section.
운전자의 주행 패턴을 학습하는 순서는 다음과 같다.The procedure for learning the driving pattern of the driver is as follows.
1. 기존의 운전자 보조 시스템 또는 자율 주행 시스템에 운전자가 탑승한다.1. The driver boarded an existing driver assistance system or an autonomous drive system.
2. 내비게이션에 출발 지점과 도착 지점을 지정한다.2. Specify the starting point and the arrival point in navigation.
3. 주행중인 차량의 주행 환경 정보를 수집하고, 정보 로깅을 시작한다.3. Collect driving environment information of running vehicle and start information logging.
4. 운전자 보조 시스템 또는 자율 주행 시스템으로 주행을 시작한다.4. Start driving with the driver assistance system or autonomous drive system.
5. 주행 시 운전자 보조 시스템 또는 자율 주행 시스템에서 개선해야 할 부분(차선 변경 및 속도 제어)을 운전자가 조작한다.5. The driver operates the parts to be improved (lane change and speed control) in the driver assistance system or autonomous driving system when driving.
6. 운전자의 조작이 필요 없을 때까지 반복적으로 강화 학습을 수행한다.6. Perform reinforcement learning repeatedly until the driver does not need to operate.
이와 같이, 본 발명은 운전자의 주행의도와 동일하게 주행하도록 자율 주행 시스템을 운전자가 학습시키기 위해 강화 학습을 이용할 수 있다.As described above, the present invention can use reinforcement learning to allow the driver to learn the autonomous driving system so that the driver runs the same as the driver.
강화 학습은 주체가 직접 탐색을 하며 학습을 하게 된다. 도면에 도시된 바와 같이, 첫 번째 주행을 n=1로 보고, 충분한 학습이 이뤄진 시점을 n=N으로 간주하면, 충분한 학습이 이루어 지면 운전자는 더 이상 개입을 하지 않게 되고, 향상된 자율주행이 가능하게 된다. 각 주행은 출발 시점을 t=t_0, 도착 지점에 도달한 시점을 t=t_(T_n )으로 한다. 각 주행은 도착 시점이 서로 상이할 수 있기 때문에 주행에 맞게 도착시점을 t_(T_n )과 같이 주행 별로 다르게 정의할 수 있다.
Reinforcement learning is conducted by subject searching directly. As shown in the figure, if the first driving is considered as n = 1, and the sufficient learning time is regarded as n = N, if sufficient learning is performed, the driver is no longer intervened, . T = t_0, and t = t_ (T_n), respectively. Since the arrival times may be different from each other, it is possible to define the arrival time differently according to the driving, such as t_ (T_n).
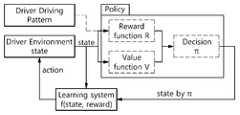
도 7은 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치에 적용되는 운전자의 주행 패턴에 따른 추상적 학습시스템 구조를 설명하기 위한 도면이고, 도 8는 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치에 적용되는 운전자의 주행 패턴에 따른 구체적 학습시스템 구조를 설명하기 위한 도면이고, 도 9은 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치에 적용되는 운전자의 주행 패턴에 따른 학습시스템의 그래프 모델을 설명하기 위한 도면이다.FIG. 7 is a diagram for explaining an abstract learning system structure according to a driving pattern of a driver applied to an autonomous travel apparatus that reflects a driving pattern of a driver according to the present invention, and FIG. 8 is a diagram FIG. 9 is a view for explaining a concrete learning system structure according to a driving pattern of a driver applied to an autonomous travel apparatus according to an embodiment of the present invention. Fig. 8 is a diagram for explaining a graph model of a learning system.
도 7을 참조하면, 운전자의 주행 패턴에 따른 추상적 학습시스템은 에이전트와 환경 사이의 인터페이스를 나타낸다. 이때, 에이전트는 주행 차량을 의미하고, 환경은 주행 환경을 의미한다. 그리고 도 8을 참조하면 본 발명에 따른 운전자의 주행 패턴에 따른 구체적 학습시스템은 Driver Driving Pattern은 운전자의 주행조작을 의미하고, 포상함수에 영향을 준다. Driving Environment은 주행환경을 의미하며, 학습시스템으로부터 행동명령을 받고, 그에 따른 주행상황상태를 돌려준다. 주행행동판단은 각 주행상황상태에서 포상함수와 가치함수를 통해 결정된다. 이와 같이, 학습시스템의 구조는 강화학습을 기반으로 이루어진다. 그리고 도 9를 참조하면 본 발명에 따른 그래프 모델은 강화학습의 일반적인 그래프모델로서, 주행환경과 주행차량의 상호작용관계를 나타내며, 각 매개변수는 S_t : 주행상황인지상태, a_t : 9가지 주행 가능한 행동, r_t : 운전자 조작에 의한 포상을 의미한다.Referring to FIG. 7, an abstract learning system according to a driving pattern of a driver represents an interface between an agent and an environment. At this time, the agent means a traveling vehicle, and the environment means a traveling environment. Referring to FIG. 8, in the concrete learning system according to the driving pattern of the driver according to the present invention, the Driver Driving Pattern refers to the driver's driving operation and affects the award function. The Driving Environment means the driving environment, receives the action command from the learning system, and returns the state of the driving situation accordingly. The judgment of the driving behavior is determined by the reward function and the value function in each driving situation condition. Thus, the structure of the learning system is based on reinforcement learning. Referring to FIG. 9, the graph model according to the present invention is a general graph model of reinforcement learning, which represents an interaction relationship between a traveling environment and a traveling vehicle, and each parameter is expressed as S_t: running state recognition state, a_t: Behavior, r_t: Refers to an award by driver's operation.
상기와 같은 본 발명에서 제안하는 학습 시스템은 강화학습 알고리즘을 기반으로 한다. 강화학습은 기본적으로 Markov Decision Process(MDP)를 따르며, MDP를 구하는 식은 다음의 수학식 1과 같다.The learning system proposed in the present invention is based on the reinforcement learning algorithm. The reinforcement learning basically follows the Markov Decision Process (MDP), and the equation for obtaining the MDP is expressed by








포상함수는 운전자 조작이 이루어졌을 때, 큰 값을 갖도록 설계하며, 위의 식과 같이 가치함수를 최대화하는 policy는 운전자 조작 policy에 가장 가깝게 된다. 따라서, 본 발명에 따른 강화 학습기반 알고리즘은 충분한 학습을 필요로 하며, 충분한 학습이 이루어졌을 때 운전자의 주행 패턴, 즉 운전자의 의도와 동일하게 자율 주행이 가능하다. .
The a priori function is designed to have a large value when the driver is manipulated, and the policy maximizing the value function is closest to the driver manipulation policy as shown in the above equation. Therefore, the reinforcement learning-based algorithm according to the present invention requires sufficient learning and it is possible to autonomously travel the driver's driving pattern, that is, the driver's intention, when sufficient learning is performed. .
포상함수는 운전자 조작이 이루어졌을 때, 큰 값을 갖도록 설계하며, 위의 식과 같이 가치함수를 최대화하는 policy는 운전자 조작 policy에 가장 가깝게 된다. 따라서, 본 발명에 따른 강화 학습기반 알고리즘은 충분한 학습을 필요로 하며, 충분한 학습이 이루어졌을 때 운전자의 주행 패턴, 즉 운전자의 의도와 동일하게 자율 주행이 가능하다. .
The a priori function is designed to have a large value when the driver is manipulated, and the policy maximizing the value function is closest to the driver manipulation policy as shown in the above equation. Therefore, the reinforcement learning-based algorithm according to the present invention requires sufficient learning and it is possible to autonomously travel the driver's driving pattern, that is, the driver's intention, when sufficient learning is performed. .
도 10은 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 장치에 적용되는 운전자의 조작으로 학습된 주행 패턴이 학습되기 전(a)과 후(b)를 설명하기 위한 도면이다.FIG. 10 is a diagram for explaining (a) and (b) before the learned travel pattern is learned by the operation of the driver applied to the autonomous travel apparatus that reflects the driving pattern of the driver according to the present invention.
도 10을 참조하여 설명하면, 학습에 의한 자율주행시스템이 가능해졌다고 가정하고, 디폴트 기준에 맞게 학습이 이루어진 자율 주행 시스템과 운전자의 주행 패턴에 따른 학습 시스템의 예를 설명하기로 한다. 학습에 의한 자율 주행 시스템은 반드시 학습 기준이 나와야 할 것이고, 이 기준을 디폴트 기준이라고 한다. 디폴트 기준은 각 나라의 정부 또는 ISO의 특정기준으로 정의한다. 이 시점에서는 차량이 생산에 들어가 소비자에 판매되기까지 디폴트 기준에 맞추어 학습이 된 후 제공될 것이다. 즉, 소비자는 직접 학습을 시킬 필요없이 완전 자율주행차량을 구입하게 될 것이다. 하지만, 몇몇 소비자는 디폴트 기준의 주행패턴보다 자신의 취향에 맞는 조율을 원할지도 모른다. 도면에 도시된 바와 같이 (a)디폴트 기준 학습은 앞에서 설명한 바와 같이, 각 나라의 정부 또는 ISO의 특정기준에 의한 학습을 의미하며, 고속도로 제한속도 100km/h, 주행 차량(A)의 현재속도 90km/h, 주행로의 앞 차량 속도 90km/h, 왼쪽차선에서 접근하는 차량의 속도 80km/h인 주행상황상태에서 디폴트기준으로 학습 되는 자율주행은 90km/h로 주행로를 유지하며 달릴 것이다. 하지만, 스포츠카 취향을 갖는 운전자의 경우는 도로법규를 벗어나지 않는 범위에서 최대한 자신의 취향에 맞게 빠른 주행을 하고자 할 수 있다. (b)운전자의 주행 패턴을 학습한 후의 주행 차량(A)는, 같은 주행 상황상태에서 100km/h속도로 왼쪽차선으로 차선변경을 하며 주행한다. 운전자의 주행 패턴에 따른 학습시스템은 안전법규를 준수하는 범위에서 운전자의 친화성, 맞춤형 주행이 가능하다.
Referring to FIG. 10, an example of an autonomous traveling system in which learning has been performed in accordance with a default criterion, and a learning system according to a driving pattern of a driver, on the assumption that an autonomous traveling system by learning has become possible will be described. The autonomous navigation system by learning must be a learning standard, and this standard is called the default standard. The default criteria are defined by national governments or specific ISO standards. At this point, the vehicle will be delivered after it has been learned to meet the default standards until it enters production and is sold to consumers. In other words, consumers will purchase fully autonomous vehicles without having to learn them directly. However, some consumers may want to tailor their preferences to their preferences rather than the default driving pattern. As shown in the figure, (a) the default reference learning means learning by governments or ISO specific standards of each country as described above, and the speed limit speed of the highway is 100 km / h, the current speed of the driving vehicle A is 90 km / h, the speed of the vehicle in front of the road is 90 km / h, and the speed of the vehicle approaching from the left lane is 80 km / h. The autonomous driving, which is learned by default, will run at 90 km / h. However, in the case of a driver who has a preference for a sports car, it is possible to make a fast running in accordance with his / her own preference within a range not exceeding the road regulations. (b) The traveling vehicle (A) after learning the driving pattern of the driver travels at a speed of 100 km / h in the same driving situation while making a lane change to the left lane. The learning system according to the driving pattern of the driver is capable of the driver's affinity and personalized driving within the range of safety regulations.
도 11은 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 방법을 설명하기 위한 도면이다.11 is a view for explaining an autonomous driving method that reflects a driving pattern of a driver according to the present invention.
도 11을 참조하여 설명하면, 본 발명에 따른 운전자의 주행 패턴을 반영하는 자율 주행 방법은 앞서 설명함 운전자의 주행 패턴을 반영하는 자율 주행 장치를 이용하는 것으로, 이하 중복되는 설명은 생략하기로 한다.Referring to FIG. 11, the autonomous driving method reflecting the driving pattern of the driver according to the present invention uses an autonomous driving apparatus that reflects the driving pattern of the driver, which will be described hereinlater.
먼저, 자율 주행중인 차량의 주행 환경 정보를 수집한다(S100). S100 단계는 GPS/INS센서와 스티어링 휠 앵글 센서(Steering wheel angle sensor), 인코더(encoder) 및 주행 거리계(odometer) 등을 센싱하는 차량 내부 센서를 통해 차량의 위치 정보를 수집하고, 라이더(Lidar), 카메라(Camera), 초음파(Ultrasonic) 및 레이더(Radar) 등을 포함하는 차량 외부 센서와 차량 대 인프라 간 통신(V2x)을 통해 차량의 주행 환경 정보를 수집한다.First, the travel environment information of the autonomous vehicle is collected (S100). In step S100, position information of the vehicle is collected through a vehicle internal sensor that senses a GPS / INS sensor, a steering wheel angle sensor, an encoder, and an odometer, Vehicle-to-infrastructure communication (V2x) and vehicle external sensors including sensors, cameras, ultrasonic and radar, and so on.
다음, 수집되는 주행 환경 정보를 토대로 주행 상황을 인지한다(S200). S200 단계는 주행 중인 차량을 중심으로 크게 전방, 좌우 측방 및 후방으로 나누고 세부적으로는 전방 동선 차량 객체, 전방 좌측 차량 객체, 전방 우측 차량 객체, 측방 우측 차량 객체, 측방 좌측 차량 객체, 후방 좌측 차량 객체 및 후방 동성 차량 객체로 구분되는 8가지 영역 중 어느 하나로 차량의 주행 상황을 인지할 수 있다.Next, the running situation is recognized based on the collected traveling environment information (S200). In step S200, the forward vehicle, the left front vehicle object, the front right vehicle object, the side right vehicle object, the left side vehicle object, the rear left vehicle object, the rear left vehicle object, And the rearward-moving vehicle object, respectively, to recognize the driving situation of the vehicle.
다음, 운전자의 조작으로 주행 패턴을 학습한다(S300). S300 단계는 강화 학습을 적용하여 기존의 자율 주행에서 운전자에 의해 옳은 주행을 했을 때 포상을 주고, 옳지 않은 주행을 하면 패널티를 주는 형태로 운전자가 개선하고 싶은 행동에 대해 조작을 가함으로써, 운전자의 주행 패턴과 의도에 맞게 학습 되도록 한다.Next, the driving pattern is learned by the driver's operation (S300). Step S300 is a step of applying reinforcement learning to give an award when the driver makes a right run in the existing autonomous drive and to manipulate the behavior that the driver wants to improve in the form of giving a penalty when the driver runs incorrectly, Be sure to learn in accordance with driving patterns and intentions.
다음, 차량의 주행 행동을 결정하고 판단한다(S400). S400 단계는 차선을 유지하면서 가속, 정속 및 감속하거나 왼쪽 차선으로 이동하면서 가속, 정속 및 감속 그리고 오른쪽 차선으로 이동하면서 가속, 정속 및 감속으로 구분되는 9가지 행동 중 어느 하나로 차량의 주행 행동을 결정할 수 있다.Next, the driving behavior of the vehicle is determined and determined (S400). In step S400, the driving behavior of the vehicle can be determined by any one of nine actions classified as acceleration, constant speed, deceleration, or acceleration, constant speed and deceleration while moving to the left lane, and acceleration, have.
다음, 결정된 주행 행동을 토대로 지역경로를 설정한다(S500).Next, a local route is set based on the determined traveling behavior (S500).
마지막으로, 설정된 지역경로를 토대로 차량의 구동부를 제어하여 자율 주행을 수행한다(S600).
Finally, the driver of the vehicle is controlled based on the set local route to perform autonomous travel (S600).
이처럼, 본 발명에 의한 운전자의 주행 패턴을 반영하는 자율 주행 장치 및 그 방법은 운전자의 조작으로 학습된 주행 패턴을 반영하여 운전자의 의도와 동일하게 자율 주행이 수행되도록 함으로써, 보다 안정적으로 최적의 자율 주행을 가능하게 한다.As described above, according to the present invention, an autonomous mobile device that reflects a driving pattern of a driver and a method thereof can reflect autonomous driving patterns learned by a driver's operation and perform autonomous driving in the same manner as a driver intends, It enables driving.
또한, 본 발명은 운전자 개개인의 주행 패턴을 반영할 수 있어 개개인에 적합한 자율 주행을 제공할 수 있다.
In addition, the present invention can reflect the driving pattern of each driver, thereby providing an autonomous driving suitable for each individual.
이상에서, 본 발명에 따른 바람직한 실시예에 대해 설명하였으나, 다양한 형태로 변형이 가능하며, 본 기술분야에서 통상의 지식을 가진 자라면 본 발명의 특허청구범위를 벗어남이 없이 다양한 변형예 및 수정예를 실시할 수 있을 것으로 이해된다.While the present invention has been particularly shown and described with reference to exemplary embodiments thereof, it is evident that many alternatives, modifications, and variations will be apparent to those skilled in the art without departing from the scope of the appended claims. As will be understood by those skilled in the art.
100 : 운전자의 주행 패턴을 반영하는 자율 주행 장치
110 : 주행 환경 정보 수집부 120 : 자율 주행 판단부
130 : 자율 주행 제어부100: an autonomous travel apparatus that reflects the driving pattern of the driver
110: traveling environment information collecting unit 120: autonomous traveling determining unit
130:
Claims (1)
Translated fromKorean수집되는 주행 환경 정보를 토대로 인지된 주행 상황과 운전자의 조작으로 학습된 주행 패턴을 반영하여 상기 차량의 주행 행동을 결정하고 판단하는 자율 주행 판단부; 및
결정된 주행 행동을 토대로 지역경로를 설정하고, 설정된 지역경로를 토대로 상기 차량의 구동부를 제어하여 자율 주행을 수행하는 자율 주행 제어부;
를 포함하는 것을 특징으로 하는 운전자의 주행 패턴을 반영하는 자율 주행 장치.A traveling environment information collecting unit for collecting traveling environment information of a self-running vehicle;
An autonomous travel determiner for determining and determining a traveling behavior of the vehicle based on the recognized travel conditions and the travel patterns learned by the operation of the driver based on the travel environment information to be collected; And
An autonomous drive control unit for setting a local route based on the determined driving behavior and controlling the driving unit of the vehicle based on the set local route to perform autonomous driving;
Wherein the driving pattern of the driver reflects the driving pattern of the driver.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020130151685AKR20150066303A (en) | 2013-12-06 | 2013-12-06 | Apparatus and method for autonomous driving using driving pattern of driver |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020130151685AKR20150066303A (en) | 2013-12-06 | 2013-12-06 | Apparatus and method for autonomous driving using driving pattern of driver |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20150066303Atrue KR20150066303A (en) | 2015-06-16 |
Family
ID=53514736
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020130151685AWithdrawnKR20150066303A (en) | 2013-12-06 | 2013-12-06 | Apparatus and method for autonomous driving using driving pattern of driver |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR20150066303A (en) |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20170057084A (en)* | 2015-11-16 | 2017-05-24 | 삼성전자주식회사 | Apparatus and method for traning model for autonomous driving, autonomous driving apparatus |
| WO2017115940A1 (en)* | 2015-12-29 | 2017-07-06 | 서울대학교산학협력단 | Method for controlling autonomous driving vehicle |
| KR20170133149A (en)* | 2016-05-25 | 2017-12-05 | 주식회사 만도 | Autonomy driving method and system based on road learning |
| KR20180052811A (en)* | 2016-11-10 | 2018-05-21 | 한국전자통신연구원 | Method for Making Autonomous or Automated Driving System and a Driving System |
| EP3483689A1 (en) | 2017-11-13 | 2019-05-15 | Sonnet Co., Ltd. | Apparatus for autonomous driving algorithm development using daily driving data and method using the same |
| KR20190058520A (en)* | 2016-09-20 | 2019-05-29 | 2236008 온타리오 인크. | Location-based support for autonomous vehicle control systems |
| US10444752B2 (en) | 2016-08-16 | 2019-10-15 | Samsung Electronics Co., Ltd. | Stereo camera-based autonomous driving method and apparatus |
| EP3575172A1 (en)* | 2018-05-31 | 2019-12-04 | Visteon Global Technologies, Inc. | Adaptive longitudinal control using reinforcement learning |
| KR20200022880A (en)* | 2018-08-24 | 2020-03-04 | 주식회사 아이티텔레콤 | Intelligent transportation system for cooperative driving between heterogeneous vehicle in heterogeneous network supporting v2x communication |
| US10671865B2 (en) | 2017-02-16 | 2020-06-02 | Samsung Electronics Co., Ltd. | Autonomous vehicle control method and apparatus |
| KR20200102378A (en)* | 2019-02-21 | 2020-08-31 | 바이두 온라인 네트웍 테크놀러지 (베이징) 캄파니 리미티드 | Information processing method and device and storage medium |
| KR20200133859A (en)* | 2019-05-20 | 2020-12-01 | 현대모비스 주식회사 | Autonomous driving apparatus and method |
| KR20210023765A (en)* | 2019-08-23 | 2021-03-04 | 모셔널 에이디 엘엘씨 | Data driven rule books |
| US11047698B2 (en) | 2018-02-27 | 2021-06-29 | Samsung Electronics Co., Ltd. | Autonomous driving apparatus and method thereof |
| CN113325834A (en)* | 2021-04-12 | 2021-08-31 | 北京航空航天大学 | Path planning method of improved A-x algorithm based on graph preprocessing |
| KR20210132282A (en)* | 2020-04-24 | 2021-11-04 | 한국철도기술연구원 | Control method for virtual train sets |
| CN116382150A (en)* | 2023-02-13 | 2023-07-04 | 北京洛必德科技有限公司 | A remote driving method, device, and electronic equipment based on a deep reinforcement learning decision system |
| CN119821442A (en)* | 2025-01-20 | 2025-04-15 | 重庆长安汽车股份有限公司 | Automatic driving control method, electronic device, vehicle and storage medium |
- 2013
- 2013-12-06KRKR1020130151685Apatent/KR20150066303A/ennot_activeWithdrawn
Cited By (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10034630B2 (en) | 2015-11-16 | 2018-07-31 | Samsung Electronics Co., Ltd. | Apparatus and method to train autonomous driving model, and autonomous driving apparatus |
| KR20170057084A (en)* | 2015-11-16 | 2017-05-24 | 삼성전자주식회사 | Apparatus and method for traning model for autonomous driving, autonomous driving apparatus |
| US10791979B2 (en) | 2015-11-16 | 2020-10-06 | Samsung Electronics Co., Ltd. | Apparatus and method to train autonomous driving model, and autonomous driving apparatus |
| WO2017115940A1 (en)* | 2015-12-29 | 2017-07-06 | 서울대학교산학협력단 | Method for controlling autonomous driving vehicle |
| KR20170133149A (en)* | 2016-05-25 | 2017-12-05 | 주식회사 만도 | Autonomy driving method and system based on road learning |
| US10444752B2 (en) | 2016-08-16 | 2019-10-15 | Samsung Electronics Co., Ltd. | Stereo camera-based autonomous driving method and apparatus |
| KR20190058520A (en)* | 2016-09-20 | 2019-05-29 | 2236008 온타리오 인크. | Location-based support for autonomous vehicle control systems |
| KR20180052811A (en)* | 2016-11-10 | 2018-05-21 | 한국전자통신연구원 | Method for Making Autonomous or Automated Driving System and a Driving System |
| US10671865B2 (en) | 2017-02-16 | 2020-06-02 | Samsung Electronics Co., Ltd. | Autonomous vehicle control method and apparatus |
| EP3483689A1 (en) | 2017-11-13 | 2019-05-15 | Sonnet Co., Ltd. | Apparatus for autonomous driving algorithm development using daily driving data and method using the same |
| US11047698B2 (en) | 2018-02-27 | 2021-06-29 | Samsung Electronics Co., Ltd. | Autonomous driving apparatus and method thereof |
| EP3575172A1 (en)* | 2018-05-31 | 2019-12-04 | Visteon Global Technologies, Inc. | Adaptive longitudinal control using reinforcement learning |
| KR20200022880A (en)* | 2018-08-24 | 2020-03-04 | 주식회사 아이티텔레콤 | Intelligent transportation system for cooperative driving between heterogeneous vehicle in heterogeneous network supporting v2x communication |
| KR20200102378A (en)* | 2019-02-21 | 2020-08-31 | 바이두 온라인 네트웍 테크놀러지 (베이징) 캄파니 리미티드 | Information processing method and device and storage medium |
| KR20200133859A (en)* | 2019-05-20 | 2020-12-01 | 현대모비스 주식회사 | Autonomous driving apparatus and method |
| KR20210023765A (en)* | 2019-08-23 | 2021-03-04 | 모셔널 에이디 엘엘씨 | Data driven rule books |
| KR20220112742A (en)* | 2019-08-23 | 2022-08-11 | 모셔널 에이디 엘엘씨 | Data driven rule books |
| US11945440B2 (en) | 2019-08-23 | 2024-04-02 | Motional Ad Llc | Data driven rule books |
| KR20210132282A (en)* | 2020-04-24 | 2021-11-04 | 한국철도기술연구원 | Control method for virtual train sets |
| CN113325834A (en)* | 2021-04-12 | 2021-08-31 | 北京航空航天大学 | Path planning method of improved A-x algorithm based on graph preprocessing |
| CN116382150A (en)* | 2023-02-13 | 2023-07-04 | 北京洛必德科技有限公司 | A remote driving method, device, and electronic equipment based on a deep reinforcement learning decision system |
| CN119821442A (en)* | 2025-01-20 | 2025-04-15 | 重庆长安汽车股份有限公司 | Automatic driving control method, electronic device, vehicle and storage medium |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20150066303A (en) | Apparatus and method for autonomous driving using driving pattern of driver | |
| US11299172B2 (en) | Automotive autonomous driving to perform complex recurrent low speed manoeuvres | |
| JP6663822B2 (en) | Automatic driving device | |
| US9994221B2 (en) | Presenting travel settings for selection of nearby vehicle to follow | |
| JP5921700B2 (en) | Vehicle guide method and driver assist system | |
| CN109421742A (en) | Method and apparatus for monitoring autonomous vehicle | |
| JP7172287B2 (en) | Autonomous driving system | |
| JP2020128167A (en) | Vehicle control device | |
| CN113365895A (en) | Vehicle control system and method | |
| EP4003803B1 (en) | Customization of autonomous-driving lane changes of motor vehicles based on drivers' driving behaviours | |
| KR20160138349A (en) | Automatic driving system for vehicle | |
| CN109421741A (en) | Method and apparatus for monitoring vehicle | |
| JP7379033B2 (en) | Driving support method and driving support device | |
| JP2019107996A (en) | Running control device for automatic driving vehicle | |
| JP2018118609A (en) | Automated driving system | |
| CN107757618A (en) | Track integrality collaboration guiding for autonomous vehicle | |
| CN114572244A (en) | Intelligent driving and ADAS front vehicle driving behavior recognition and prediction method and module | |
| CN103129556A (en) | Driving assistance system | |
| JP2022154836A (en) | VEHICLE CONTROL DEVICE, VEHICLE CONTROL METHOD, AND PROGRAM | |
| CN110426215A (en) | A kind of method for establishing model and intelligent driving system for vehicle ride comfort test | |
| JP7196220B2 (en) | VEHICLE CONTROL DEVICE, VEHICLE CONTROL METHOD, AND PROGRAM | |
| EP4244692B1 (en) | Optimization of performance in automotive autonomous driving of recurrent low speed manoeuvres in digital road maps-free areas | |
| CN116677769A (en) | Vehicle gear shifting control method and device and vehicle | |
| US11827223B2 (en) | Systems and methods for intersection maneuvering by vehicles | |
| CN117068191A (en) | Activating adaptive cruise control |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application | Patent event code:PA01091R01D Comment text:Patent Application Patent event date:20131206 | |
| PG1501 | Laying open of application | ||
| PC1203 | Withdrawal of no request for examination | ||
| WITN | Application deemed withdrawn, e.g. because no request for examination was filed or no examination fee was paid |