KR20140136791A - Method for generating path plan of mobile robot - Google Patents
Method for generating path plan of mobile robotDownload PDFInfo
- Publication number
- KR20140136791A KR20140136791AKR20130057311AKR20130057311AKR20140136791AKR 20140136791 AKR20140136791 AKR 20140136791AKR 20130057311 AKR20130057311 AKR 20130057311AKR 20130057311 AKR20130057311 AKR 20130057311AKR 20140136791 AKR20140136791 AKR 20140136791A
- Authority
- KR
- South Korea
- Prior art keywords
- mobile robot
- exception
- path plan
- plan
- path
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images

Classifications
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/22—Command input arrangements
- G05D1/221—Remote-control arrangements
- G05D1/227—Handing over between remote control and on-board control; Handing over between remote control arrangements
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/24—Arrangements for determining position or orientation
- G05D1/243—Means capturing signals occurring naturally from the environment, e.g. ambient optical, acoustic, gravitational or magnetic signals
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/644—Optimisation of travel parameters, e.g. of energy consumption, journey time or distance
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2101/00—Details of software or hardware architectures used for the control of position
- G05D2101/10—Details of software or hardware architectures used for the control of position using artificial intelligence [AI] techniques
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/01—Mobile robot
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Manipulator (AREA)
Abstract
Translated fromKoreanDescription
Translated fromKorean본 발명은 이동로봇 주행 중에 발생하는 예외상황에 대처할 수 있도록 경로계획을 생성하는 이동 로봇의 경로계획 생성 방법에 관한 것이다.The present invention relates to a path planning method of a mobile robot for generating a path plan so as to cope with an exception occurring during traveling of a mobile robot.
이동 로봇은 어떤 작업이나 조작을 자동으로 수행하는 장치로서, 다양한 분야에서 인간을 대신하거나 보조하는데 활용된다. 이동 로봇에 주어진 임무 또는 서비스를 수행하기 위해서 로봇의 동작을 제어하는 것은 중요하다. 이동 로봇에 대한 연구 중 가장 기본적인 과제는 동적인 환경에서의 안전한 주행이다. 동적으로 움직이는 장애물이 존재하거나 로봇의 목표 지점이 변화하는 동적인 환경에서의 자율이동 로봇의 안전한 주행을 보장하는 만족스러운 제어 알고리즘에 관한 연구는 여전히 진행 중이다. 이러한 자율이동 로봇의 안전한 주행을 목적으로 하는 기본적인 연구 중 하나는 시작 지점부터 목표 지점까지의 연결된 경로를 생성해주는 경로계획(path planning)이다. 이러한 경로계획을 따라 이동로봇이 주행하는 중에 예외상황(프로그래머가 고려하여 대처행동을 마련하지 못한 상황)이 발생하는 경우, 사용자가 이동로봇의 주행권을 강제로 빼앗고 로봇을 정지시키거나 원격 제어를 통해 이동로봇을 조종하는 방법으로 예외상황에 대처하게 된다. 이와 같이 예외상황이 발생하는 경우 사용자가 개입하여 이동로봇을 강제 정지시키거나 원격조정하게 되어 이로 인해 발생하는 별도의 개발 비용 및 이동로봇의 임무 지연을 야기시킨다.A mobile robot is a device that automatically performs a task or an operation, and is used to substitute or assist a person in various fields. It is important to control the motion of the robot in order to perform the mission or service given to the mobile robot. The most basic task of research on mobile robots is safe driving in a dynamic environment. Research is still under way on satisfactory control algorithms to ensure the safe running of autonomous mobile robots in dynamic environments where dynamically moving obstacles exist or where the robot's target point changes. One of the basic researches aiming at the safe running of autonomous mobile robots is path planning which creates a connected path from the starting point to the target point. If an exception (situation in which the programmer does not prepare coping behavior) occurs during the traveling of the mobile robot according to the path plan, the user forcibly takes the mobile robot's driving permission and stops the robot or performs remote control It manages the mobile robot through the process of coping with the exception. In such an exceptional situation, the user intervenes to forcibly stop or remotely adjust the mobile robot, which causes a separate development cost and a delay in the task of the mobile robot.
본 발명이 해결하고자 하는 기술적인 과제는 이동로봇 주행 중에 발생하는 예외상황에 대처할 수 있도록 경로계획을 생성하는 이동 로봇의 경로계획 생성 방법을 제공하는데 있다.SUMMARY OF THE INVENTION It is an object of the present invention to provide a path planning method of a mobile robot for generating a path plan so as to cope with an exception occurring during traveling of a mobile robot.
본 발명이 이루고자 하는 기술적인 과제를 해결하기 위한 이동로봇의 경로생성 방법은 기설정된 경로계획계획에 따른 주행 중에 이동로봇 주변의 환경인식을 통해 생성된 상황정보로부터 예외상황의 발생여부를 판단하는 단계; 상기 예외상황이 발생한 경우 상기 이동로봇은 주행권을 사용자에게 이양(移讓)하고, 상기 사용자에 의해 생성된 로봇 주행 제어신호를 기반으로 예외상황 경로계획을 생성하여 저장하는 단계; 및 상기 예외상황 경로계획 저장이 완료되면, 주행권이 상기 이동로봇으로 전수(傳受)되고, 상기 이동로봇은 상기 기설정된 경로계획 또는 상기 예외상황 경로계획에 따라 주행하는 단계;를 포함하는 것을 특징으로 한다.A method of generating a path of a mobile robot for solving the technical problem to be accomplished by the present invention comprises the steps of determining whether or not an exception situation occurs from situation information generated through environmental recognition around the mobile robot during traveling according to a predetermined path planning plan ; If the exception occurs, the mobile robot transfers the driving right to the user, and generates and stores an exception situation path plan based on the robot driving control signal generated by the user; And a step in which when the storage of the exception situation path plan is completed, a running license is transmitted to the mobile robot, and the mobile robot travels in accordance with the predetermined path plan or the exception situation path plan .
본 발명에 있어서, 상기 이동로봇은 저장되어 있지 않은 예외상황 발생시 마다 해당하는 예외상황 경로계획을 생성하여 저장하는 것을 특징으로 한다.In the present invention, the mobile robot generates and stores a corresponding exception situation path plan every time an exceptional situation that is not stored is generated.
본 발명에 있어서, 상기 주행하는 단계는, 상기 기설정된 경로계획 또는 복수의 상기 예외상황 경로계획 중 어느 하나에 따라 주행하는 것을 특징으로 한다.In the present invention, the traveling may be performed in accordance with any one of the predetermined route plan or the plurality of exception situation path plans.
상술한 바와 같이 본 발명에 따르면, 이동로봇 주행 중에 발생하는 예외상황에 대처할 수 있도록 경로계획을 생성하여 주행함으로써, 별도의 개발 비용 및 이동로봇의 임무 지연을 방지할 수 있게 된다.As described above, according to the present invention, it is possible to prevent a separate development cost and a task delay of the mobile robot by creating and running a route plan so as to cope with exceptional situations occurring while the mobile robot is running.
도 1은 이동로봇의 경로계획 생성장치의 구성을 보이는 블록도 이다.
도 2는 본 발명의 일 실시 예에 따른 이동로봇의 경로계획 생성 방법의 동작을 보이는 흐름도 이다.1 is a block diagram showing a configuration of a path planning apparatus of a mobile robot.
2 is a flowchart illustrating an operation of a path planning method of a mobile robot according to an embodiment of the present invention.
본 발명은 다양한 변환을 가할 수 있고 여러 가지 실시 예를 가질 수 있는 바, 특정 실시 예들을 도면에 예시하고 상세한 설명에 상세하게 설명하고자 한다. 그러나, 이는 본 발명을 특정한 실시 형태에 대해 한정하려는 것이 아니며, 본 발명의 사상 및 기술 범위에 포함되는 모든 변환, 균등물 내지 대체물을 포함하는 것으로 이해되어야 한다. 본 발명을 설명함에 있어서 관련된 공지 기술에 대한 구체적인 설명이 본 발명의 요지를 흐릴 수 있다고 판단되는 경우 그 상세한 설명을 생략한다.BRIEF DESCRIPTION OF THE DRAWINGS The present invention is capable of various modifications and various embodiments, and specific embodiments are illustrated in the drawings and described in detail in the detailed description. It is to be understood, however, that the invention is not to be limited to the specific embodiments, but includes all modifications, equivalents, and alternatives falling within the spirit and scope of the invention. DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTS Hereinafter, the present invention will be described in detail with reference to the accompanying drawings.
제1, 제2 등의 용어는 다양한 구성요소들을 설명하는데 사용될 수 있지만, 구성요소들은 용어들에 의해 한정되어서는 안 된다. 용어들은 하나의 구성요소를 다른 구성요소로부터 구별하는 목적으로만 사용된다.The terms first, second, etc. may be used to describe various elements, but the elements should not be limited by terms. Terms are used only for the purpose of distinguishing one component from another.
본 출원에서 사용한 용어는 단지 특정한 실시 예를 설명하기 위해 사용된 것으로, 본 발명을 한정하려는 의도가 아니다. 단수의 표현은 문맥상 명백하게 다르게 뜻하지 않는 한, 복수의 표현을 포함한다. 본 출원에서, "포함하다" 또는 "가지다" 등의 용어는 명세서상에 기재된 특징, 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것이 존재함을 지정하려는 것이지, 하나 또는 그 이상의 다른 특징들이나 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것들의 존재 또는 부가 가능성을 미리 배제하지 않는 것으로 이해되어야 한다.The terminology used in this application is used only to describe a specific embodiment and is not intended to limit the invention. The singular expressions include plural expressions unless the context clearly dictates otherwise. In the present application, the terms "comprises" or "having" and the like are used to specify that there is a feature, a number, a step, an operation, an element, a component or a combination thereof described in the specification, But do not preclude the presence or addition of one or more other features, integers, steps, operations, elements, components, or combinations thereof.
본 발명은 기능적인 블록 구성들 및 다양한 처리 단계들로 나타내어질 수 있다. 이러한 기능 블록들은 특정 기능들을 실행하는 다양한 개수의 하드웨어 또는/및 소프트웨어 구성들로 구현될 수 있다. 예를 들어, 본 발명은 하나 이상의 마이크로프로세서들의 제어 또는 다른 제어 장치들에 의해서 다양한 기능들을 실행할 수 있는, 메모리, 프로세싱, 로직(logic), 룩업 테이블(look-up table) 등과 같은 직접 회로 구성들을 채용할 수 있다. 본 발명에의 구성 요소들이 소프트웨어 프로그래밍 또는 소프트웨어 요소들로 실행될 수 잇는 것과 유사하게, 본 발명은 데이터 구조, 프로세스들, 루틴들 또는 다른 프로그래밍 구성들의 조합으로 구현되는 다양한 알고리즘을 포함하여, C, C++, 자바(Java), 어셈블러(assembler) 등과 같은 프로그래밍 또는 스크립팅 언어로 구현될 수 있다. 기능적인 측면들은 하나 이상의 프로세서들에서 실행되는 알고리즘으로 구현될 수 있다. 또한, 본 발명은 전자적인 환경 설정, 신호 처리, 및/또는 데이터 처리 등을 위하여 종래 기술을 채용할 수 있다. 매커니즘, 요소, 수단, 구성과 같은 용어는 넓게 사용될 수 있으며, 기계적이고 물리적인 구성들로서 한정되는 것은 아니다. 상기 용어는 프로세서 등과 연계하여 소프트웨어의 일련의 처리들(routines)의 의미를 포함할 수 있다.The present invention may be represented by functional block configurations and various processing steps. These functional blocks may be implemented in a wide variety of hardware and / or software configurations that perform particular functions. For example, the present invention may include integrated circuit configurations, such as memory, processing, logic, look-up tables, etc., that may perform various functions by control of one or more microprocessors or other control devices Can be adopted. Similar to the components of the present invention that may be implemented with software programming or software components, the present invention may be implemented as a combination of C, C ++, and C ++, including various algorithms implemented with data structures, processes, routines, , Java (Java), assembler, and the like. Functional aspects may be implemented with algorithms running on one or more processors. Further, the present invention can employ conventional techniques for electronic environment setting, signal processing, and / or data processing. Terms such as mechanisms, elements, means, and configurations are widely used and are not limited to mechanical and physical configurations. The term may include the meaning of a series of routines of software in conjunction with a processor or the like.
이하, 본 발명의 실시 예를 첨부도면을 참조하여 상세히 설명하기로 하며, 첨부 도면을 참조하여 설명함에 있어, 동일하거나 대응하는 구성 요소는 동일한 도면번호를 부여하고 이에 대한 중복되는 설명은 생략하기로 한다.DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENT Hereinafter, embodiments of the present invention will be described in detail with reference to the accompanying drawings. Referring to the accompanying drawings, the same or corresponding components are denoted by the same reference numerals, do.
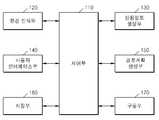
도 1은 이동로봇의 경로계획 생성장치의 구성을 보이는 블록도 이다. 도 1을 참조하면, 이동로봇의 경로계획 생성장치는 제어부(110), 환경 인식부(120), 상황정보 생성부(130), 사용자 인터페이스(140), 경로계획 생성부(150), 저장부(160) 및 구동부(170)를 포함한다.1 is a block diagram showing a configuration of a path planning apparatus of a mobile robot. 1, the path planning apparatus for a mobile robot includes a
제어부(110)는 마이크로 프로세서(미도시) 등을 포함하여 경로계획 생성장치의 전반적인 동작을 제어한다. 이하 제어부(110)의 구체적인 동작은 다른 구성요소들과 함께 설명하기로 한다.The
환경 인식부(120)는 제어부(110)의 제어 하에 예를 들면, 초음파 센서, 적외선 센서, 레이저 센서 등을 포함하는 거리 측정 센서(미도시)를 이용하여 이동로봇이 임의의 공간을 스캔(환경 인식)하여 탐색한 결과정보를 취합한다. 더 나아가 환경 인식부(120)는 예를 들어 카메라 또는 스테레오 카메라 등을 포함하는 영상 촬영부(미도시)를 이용하여 촬영된 영상내에서 탐색한 결과 정보를 취합한다.The
상황정보 생성부(130)는 제어부(110)의 제어 하에, 환경 인식부(120)가 취함한 결과 정보를 이용하여 상황정보를 생성한다. 여기서 상황정보라 함은 환경 인식부(120)로부터 수신한 결과정보를 이용하여 생성하는 정적 환경 지도, 동적 장애물 정보, 도로 정보 등을 포함할 수 있으며, 더 나아가 이동로봇에게 주어진 탐색/순찰/목적지 도달 등과 같은 임무 정보일 수도 있다.The context
제어부(110)는 상황정보 생성부(130)로부터 상황정보를 수신하여 예외상황 발생여부를 판단하고, 예외상황이 발생한 경우 저장부(160)에 저장된 기설정된 경로계획으로 자율주행하고 있는 이동로봇의 주행권을 사용자에게 이양(移讓)한다.The
여기서 예외상황이라 함은, 이동로봇이 저장부(160)에 저장되어 있는 기설정된 경로계획으로 이동하는 중에, 기설정된 경로계획에 존재하지 않은 상황이 발생한 경우로, 예를 들어, 로봇이 기설정된 경로계획 주행 중 환경적으로 설정된 금지 주행구역을 주행하는 경우, 또는 이동로봇이 도로 주행 중 전/후방에 예측하지 못한 장애물(예를 들어 구급차)이 발생한 경우 등이 있을 수 잇다.Here, the exceptional situation refers to a case where a situation in which the mobile robot moves to a preset path plan stored in the
사용자 인터페이스부(140)는 이동로봇이 주행할 수 있도록 시작지점 및 목표지점의 좌표를 수신하거나, 이동로봇에 작업명령을 입력하기 위해 사용자에 의한 스위치 조작 신호 또는 음성 신호를 수신한다. 특히 사용자 인터페이스부(140)는, 제어부(110)로부터 예외상황 발생 신호를 수신함과 동시에, 사용자에 의해 생성된 로봇 주행 제어신호를 제어부(110)로 전송한다. 여기서, 사용자 인터페이스부(140)가 사용자에 의해 생성된 로봇 주행 제어신호는, 예외상황에 대처하기 위해 사용자로부터 수신되는 이동로봇의 위치 제어신호, 방향 제어신호, 속도 제어신호 등일 수 있다.The
경로계획 생성부(150)는 제어부(110)의 제어 하에, 사용자 인터페이스부(140)로부터 수신되는 이동로봇의 위치 제어신호, 방향 제어신호, 속도 제어신호 등을 이용하여 예외상황 경로계획을 생성하고, 저장부(160)에 저장한다. 이로써, 저장부(160)에는 기설정된 경로계획 및 예외상황 경로계획이 저장되어 있게 된다.The path
예외상황 경로계획 생성이 완료되면, 제어부(110)는 이동로봇의 주행권을 사용자로부터 전수(傳受)받고, 이동로봇이 저장부(160)에 저장된 기설정된 경로계획 또는 예외상황 경로계획 중 어느 하나로 주행하도록 제어한다. 즉, 기설정된 경로계획으로 주행 중에 저장부(160)에 저장된 예외상황이 발생한 경우, 제어부(110)는 기설정된 경로계획으로의 주행을 종료하고, 이동로봇이 예외상황 경로계획으로 주행하도록 제어한다.When the creation of the exception situation path planning is completed, the
구동부(170)는 예를 들면, 구동 모터(미도시) 등을 포함하여 이동로봇을 이동시키는 것으로, 제어부(110)로부터의 제어신호에 의해 기설정된 경로계획 또는 예외상황 경로계획 중 어느 하나로 이동로봇을 이동시킨다.The
이동로봇이 자율주행 중에 발생하는 예외상황은 예측할 수 없기 때문에, 이동로봇의 경로계획 생성장치는 기존에 저장되어 있지 않은 예외상황이 발생할 때마다 이동로봇의 주행권을 사용자에게 이양하고, 사용자에 의해 생성되는 이동 로봇을 주행 정보를 이용하여 예외상황 경로계획을 생성하여 저장부(160)에 저장한다. 따라서, 저장부(160)에는 기존에 저장되지 않은 예외상황 경로계획이 계속해서 업데이트됨으로써 시간이 경과함에 따라 이동로봇이 예외상황에 대처하는 능력이 상승하게 된다.Since the exception situation that occurs while the mobile robot is in autonomous motion can not be predicted, the path plan generation device of the mobile robot transfers the driving rights of the mobile robot to the user every time an exception condition that is not stored is generated, The generated mobile robot generates an exception situation path plan using the travel information and stores it in the
도 2는 본 발명의 일 실시 예에 따른 이동로봇의 경로계획 생성 방법의 동작을 보이는 흐름도 이다. 본 발명의 일 실시 예에 따른 이동로봇의 경로계획 생성 방법은 도 1에 도시된 바와 같이 주변 구성 요소들의 도움을 받아 제어부(110)에서 수행될 수 있다. 이하의 설명에서, 도 1에 대한 설명과 중복되는 부분은 그 설명을 생략하기로 한다.2 is a flowchart illustrating an operation of a path planning method of a mobile robot according to an embodiment of the present invention. The path planning method of the mobile robot according to an embodiment of the present invention can be performed in the
도 2를 참조하면, 제어부(110)는 기설정된 경로계획에 따라 이동로봇을 주행하는 중에, 이동로봇 주변의 환경인식을 통해 생성된 상황정보를 수신하여 예외상황 발생여부를 판단하는 단계(S100)를 수행한다.Referring to FIG. 2, the
이동로봇의 환경인식은 초음파 센서, 적외선 센서, 레이저 센서 등을 포함하는 거리 측정 센서(미도시)를 이용하여 이동로봇이 임의의 공간을 스캔(환경 인식)하여 탐색한 결과정보 또는 카메라 또는 스테레오 카메라 등을 포함하는 영상 촬영부(미도시)를 이용하여 촬영된 영상내에서 탐색한 결과정보 생성을 통해 알 수 있다. 또한 상황정보 생성은 환경인식 결과 정보를 이용하여 생성하는 정적 환경 지도, 동적 장애물 정보, 도로 정보 등을 포함할 수 있으며, 더 나아가 이동로봇에게 주어진 탐색/순찰/목적지 도달 등과 같은 임무 정보일 수도 있다. 또한 예외상황 발생여부 판단은, 이동로봇이 저장되어 있는 기설정된 경로계획으로 이동하는 중에, 기설정된 경로계획에 존재하지 않은 상황이 발생한 경우로, 예를 들어, 로봇이 기설정된 경로계획 주행 중 환경적으로 설정된 금지 주행구역을 주행하는 경우, 또는 이동로봇이 도로 주행 중 전/후방에 예측하지 못한 장애물(예를 들어 구급차)이 발생한 경우 등이 있을 수 있다.The environment recognition of the mobile robot is performed by using a distance sensor (not shown) including an ultrasonic sensor, an infrared sensor, and a laser sensor to scan the arbitrary space (environment recognition) (Not shown), and the like, to generate a result information. In addition, the context information generation may include a static environment map, dynamic obstacle information, and road information generated using the environment recognition result information, and may further include mission information such as search / patrol / destination arrival given to the mobile robot . The determination as to whether or not an exceptional situation has occurred is a case where a situation that does not exist in a predetermined path plan occurs while the mobile robot moves to a predetermined path plan stored in the mobile robot. For example, (Eg, an ambulance) occurs in front of or behind the road while the mobile robot is traveling on the road.
이와 같이 이동로봇 주행중에 예외상황이 발생한 것으로 판단되면, 제어부(110)는 기설정된 경로계획에 따른 자율 주행을 종료하고, 이동로봇의 주행권을 사용자에게 이양하고, 사용자에 의해 생성된 로봇 주행 제어신호를 기반으로 예외상황 경로 계획을 생성하여 저장하는 단계(S200)를 수행한다. 여기서, 사용자에 의해 생성된 로봇 주행 제어신호는 예외상황에 대처하기 위한 이동로봇의 위치 제어 신호, 방향 제어 신호, 속도 제어 신호 등일 수 있고, 이러한 주행 제어신호를 이용하여 예외상황 경로계획을 생성하고, 저장한다. 이로써, 저장부(160)에는 기설정된 경로계획 및 예외상황 경로계획이 저장되어 있게 된다.If it is determined that an exception occurs during the traveling of the mobile robot, the
예외상황 경로계획 저장이 완료되면, 제어부(110)는 주행권을 이동로봇으로 전수하고, 이동로봇은 기설정된 경로계획 또는 예외상황 경로계획에 따라 주행하는 단계(S300)를 수행한다. 즉, 기설정된 경로계획으로 주행 중에 저장부(160)에 저장된 예외상황이 발생한 경우, 제어부(110)는 기설정된 경로계획으로의 주행을 종료하고, 이동로봇이 예외상황 경로계획으로 주행하도록 제어한다.When the exception situation path planning storage is completed, the
이후 이동로봇 주행 중 저장되어 있지 않은 예외상황이 발생할 때마다 제어부(110)는 해당 예외상황 경로계획을 생성하여 저장하고, 이동로봇은 기설정된 경로계획 또는 복수의 예외상황 경로계획 중 어느 하나에 따라 주행하는 단계(S400)를 수행한다. 이동로봇이 자율주행 중에 발생하는 예외상황은 예측할 수 없기 때문에, 이동로봇의 경로계획 생성장치는 기존에 저장되어 있지 않은 예외상황이 발생할 때마다 이동로봇의 주행권을 사용자에게 이양하고, 사용자에 의해 생성되는 이동 로봇을 주행 정보를 이용하여 예외상황 경로계획을 생성하여 저장부(160)에 저장한다. 따라서, 저장부(160)에는 기존에 저장되지 않은 예외상황 경로계획이 계속해서 업데이트됨으로써 시간이 경과함에 따라 이동로봇이 예외상황에 대처하는 능력이 상승하게 된다.The
한편, 본 발명은 컴퓨터로 읽을 수 있는 기록 매체에 컴퓨터가 읽을 수 있는 코드로 구현하는 것이 가능하다. 컴퓨터가 읽을 수 있는 기록 매체는 컴퓨터 시스템에 의하여 읽혀질 수 있는 데이터가 저장되는 모든 종류의 기록 장치를 포함한다.Meanwhile, the present invention can be embodied in computer readable code on a computer readable recording medium. A computer-readable recording medium includes all kinds of recording apparatuses in which data that can be read by a computer system is stored.
컴퓨터가 읽을 수 있는 기록 매체의 예로는 ROM, RAM, CD-ROM, 자기 테이프, 플로피디스크, 광 데이터 저장장치 등이 있으며, 또한 캐리어 웨이브(예를 들어 인터넷을 통한 전송)의 형태로 구현하는 것을 포함한다. 또한, 컴퓨터가 읽을 수 있는 기록 매체는 네트워크로 연결된 컴퓨터 시스템에 분산되어, 분산 방식으로 컴퓨터가 읽을 수 있는 코드가 저장되고 실행될 수 있다. 그리고 본 발명을 구현하기 위한 기능적인(functional) 프로그램, 코드 및 코드 세그먼트들은 본 발명이 속하는 기술 분야의 프로그래머들에 의하여 용이하게 추론될 수 있다.Examples of the computer-readable recording medium include a ROM, a RAM, a CD-ROM, a magnetic tape, a floppy disk, an optical data storage device and the like, and also a carrier wave (for example, transmission via the Internet) . In addition, the computer-readable recording medium may be distributed over network-connected computer systems so that computer readable codes can be stored and executed in a distributed manner. In addition, functional programs, codes, and code segments for implementing the present invention can be easily deduced by programmers skilled in the art to which the present invention belongs.
이제까지 본 발명에 대하여 바람직한 실시 예를 중심으로 살펴보았다. 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자는 본 발명의 본질적인 특성에서 벗어나지 않는 범위에서 변형된 형태로 본 발명을 구현할 수 있음을 이해할 것이다. 그러므로 상기 개시된 실시 예들은 한정적인 관점이 아니라 설명적인 관점에서 고려되어야 한다. 본 발명의 범위는 전술한 설명이 아니라 특허청구범위에 나타나 있으며, 그와 동등한 범위 내에 있는 모든 차이점은 본 발명에 포함된 것으로 해석되어야 한다.The present invention has been described above with reference to preferred embodiments. It will be understood by those skilled in the art that the present invention may be embodied in various other forms without departing from the spirit or essential characteristics thereof. Therefore, the above-described embodiments should be considered in an illustrative rather than a restrictive sense. The scope of the present invention is indicated by the appended claims rather than by the foregoing description, and all differences within the scope of equivalents thereof should be construed as being included in the present invention.
110: 제어부
120: 환경 인식부
130: 상황정보 생성부
140: 사용자 인터페이스부
150: 경로계획 생성부
160: 저장부
170: 구동부110:
120: Environment Recognition Department
130:
140: User interface section
150: path planning section
160:
170:
Claims (3)
Translated fromKorean상기 예외상황이 발생한 경우 상기 이동로봇은 주행권을 사용자에게 이양(移讓)하고, 상기 사용자에 의해 생성된 로봇 주행 제어신호를 기반으로 예외상황 경로계획을 생성하여 저장하는 단계; 및
상기 예외상황 경로계획 저장이 완료되면, 주행권이 상기 이동로봇으로 전수(傳受)되고, 상기 이동로봇은 상기 기설정된 경로계획 또는 상기 예외상황 경로계획에 따라 주행하는 단계;를 포함하는 것을 특징으로 하는 이동로봇의 경로계획 생성 방법.Determining whether or not an exception condition is generated from the context information generated through environment recognition around the mobile robot while driving according to a predetermined path plan plan;
If the exception occurs, the mobile robot transfers the driving right to the user, and generates and stores an exception situation path plan based on the robot driving control signal generated by the user; And
And when the exception situation path plan storage is completed, a traveling right is transmitted to the mobile robot, and the mobile robot travels according to the predetermined path plan or the exception situation path plan. A path planning method of a mobile robot.
상기 이동로봇은 저장되어 있지 않은 예외상황 발생시 마다 해당하는 예외상황 경로계획을 생성하여 저장하는 것을 특징으로 하는 이동로봇의 경로계획 생성 방법.The method according to claim 1,
Wherein the mobile robot generates and stores a corresponding exception situation path plan at each occurrence of an exception that is not stored.
상기 기설정된 경로계획 또는 복수의 상기 예외상황 경로계획 중 어느 하나에 따라 주행하는 것을 특징으로 하는 경로계획 생성 방법.3. The method according to claim 2,
Wherein the route planning is executed in accordance with any one of the predetermined route plan or the plurality of exception situation route plans.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020130057311AKR101912797B1 (en) | 2013-05-21 | 2013-05-21 | Method for generating path plan of mobile robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020130057311AKR101912797B1 (en) | 2013-05-21 | 2013-05-21 | Method for generating path plan of mobile robot |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20140136791Atrue KR20140136791A (en) | 2014-12-01 |
| KR101912797B1 KR101912797B1 (en) | 2018-10-29 |
Family
ID=52456928
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020130057311AActiveKR101912797B1 (en) | 2013-05-21 | 2013-05-21 | Method for generating path plan of mobile robot |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101912797B1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113050614A (en)* | 2019-12-26 | 2021-06-29 | 炬星科技(深圳)有限公司 | Method, device and storage medium for autonomous robot execution capacity management |
| CN115752502A (en)* | 2023-01-04 | 2023-03-07 | 小米汽车科技有限公司 | Path screening method and device and electronic equipment |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102715867B1 (en) | 2021-12-30 | 2024-10-11 | 주식회사 클로봇 | Method, apparatus and program for avoiding driving deadlocks between mobile robots |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11149315A (en)* | 1997-11-19 | 1999-06-02 | Mitsubishi Heavy Ind Ltd | Robot control system |
| JP2010512592A (en)* | 2006-12-11 | 2010-04-22 | ビ−エイイ− システムズ パブリック リミテッド カンパニ− | Control of autonomous vehicle systems |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008021178A (en)* | 2006-07-13 | 2008-01-31 | Fujitsu Ltd | Autonomous mobile robot, autonomous mobile method, and autonomous mobile information processing program |
- 2013
- 2013-05-21KRKR1020130057311Apatent/KR101912797B1/enactiveActive
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11149315A (en)* | 1997-11-19 | 1999-06-02 | Mitsubishi Heavy Ind Ltd | Robot control system |
| JP2010512592A (en)* | 2006-12-11 | 2010-04-22 | ビ−エイイ− システムズ パブリック リミテッド カンパニ− | Control of autonomous vehicle systems |
Non-Patent Citations (1)
| Title |
|---|
| 일본 공표특허공보 특표2010-512592호(2010.04.22.) 1부.* |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113050614A (en)* | 2019-12-26 | 2021-06-29 | 炬星科技(深圳)有限公司 | Method, device and storage medium for autonomous robot execution capacity management |
| CN113050614B (en)* | 2019-12-26 | 2022-07-26 | 炬星科技(深圳)有限公司 | Method, device and storage medium for autonomous robot management of execution capacity |
| CN115752502A (en)* | 2023-01-04 | 2023-03-07 | 小米汽车科技有限公司 | Path screening method and device and electronic equipment |
Also Published As
| Publication number | Publication date |
|---|---|
| KR101912797B1 (en) | 2018-10-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10948907B2 (en) | Self-driving mobile robots using human-robot interactions | |
| JP6543373B2 (en) | Control type planning and control system used for autonomous driving vehicles | |
| JP6761854B2 (en) | How to distribute vehicle position points for autonomous vehicles | |
| CN111949027B (en) | Self-adaptive robot navigation method and device | |
| JP7312582B2 (en) | unmanned mobile device | |
| WO2008032673A1 (en) | Moving device | |
| KR20100102815A (en) | Unmanned transport apparatus and its method | |
| JPWO2019058720A1 (en) | Information processing equipment, autonomous mobile devices, and methods, and programs | |
| GB2583604A (en) | Collision prevention for autonomous vehicles | |
| CN105607637A (en) | Unmanned vehicle autopilot system | |
| US20220301440A1 (en) | Conflict detection and avoidance along a current route of a robot | |
| US10369696B1 (en) | Spatiotemporal robot reservation systems and method | |
| US20190126921A1 (en) | Computer-assisted or autonomous driving method and apparatus with consideration for travelers' intent | |
| KR101912797B1 (en) | Method for generating path plan of mobile robot | |
| KR102706709B1 (en) | Communication-based robot control system and method thereof | |
| KR20150075639A (en) | Collaborative robotic control system | |
| JP6771730B2 (en) | Autonomous adjustment operating body | |
| CN105843225B (en) | Data processing method and equipment | |
| CN112585616A (en) | Method for predicting at least one future speed vector and/or future posture of a pedestrian | |
| JP7476563B2 (en) | OBJECT TRACKING DEVICE, OBJECT TRACKING METHOD, AND OBJECT TRACKING PROGRAM | |
| Binh et al. | Deep learning-based object tracking and following for AGV robot | |
| WO2021246169A1 (en) | Information processing device, information processing system, method, and program | |
| EP4113239A1 (en) | Conflict detection and avoidance for a robot with right-of-way rule compliant maneuver selection | |
| Marin-Plaza et al. | Complete ros-based architecture for intelligent vehicles | |
| EP3945396B1 (en) | Detecting conflict along a route of a robot |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application | St.27 status event code:A-0-1-A10-A12-nap-PA0109 | |
| PG1501 | Laying open of application | St.27 status event code:A-1-1-Q10-Q12-nap-PG1501 | |
| PN2301 | Change of applicant | St.27 status event code:A-3-3-R10-R13-asn-PN2301 St.27 status event code:A-3-3-R10-R11-asn-PN2301 | |
| A201 | Request for examination | ||
| PA0201 | Request for examination | St.27 status event code:A-1-2-D10-D11-exm-PA0201 | |
| P22-X000 | Classification modified | St.27 status event code:A-2-2-P10-P22-nap-X000 | |
| D13-X000 | Search requested | St.27 status event code:A-1-2-D10-D13-srh-X000 | |
| R18-X000 | Changes to party contact information recorded | St.27 status event code:A-3-3-R10-R18-oth-X000 | |
| N231 | Notification of change of applicant | ||
| PN2301 | Change of applicant | St.27 status event code:A-3-3-R10-R13-asn-PN2301 St.27 status event code:A-3-3-R10-R11-asn-PN2301 | |
| D14-X000 | Search report completed | St.27 status event code:A-1-2-D10-D14-srh-X000 | |
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection | St.27 status event code:A-1-2-D10-D21-exm-PE0902 | |
| P11-X000 | Amendment of application requested | St.27 status event code:A-2-2-P10-P11-nap-X000 | |
| P13-X000 | Application amended | St.27 status event code:A-2-2-P10-P13-nap-X000 | |
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration | St.27 status event code:A-1-2-D10-D22-exm-PE0701 | |
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment | St.27 status event code:A-2-4-F10-F11-exm-PR0701 | |
| PR1002 | Payment of registration fee | St.27 status event code:A-2-2-U10-U11-oth-PR1002 Fee payment year number:1 | |
| PG1601 | Publication of registration | St.27 status event code:A-4-4-Q10-Q13-nap-PG1601 | |
| PN2301 | Change of applicant | St.27 status event code:A-5-5-R10-R13-asn-PN2301 St.27 status event code:A-5-5-R10-R11-asn-PN2301 | |
| PR1001 | Payment of annual fee | St.27 status event code:A-4-4-U10-U11-oth-PR1001 Fee payment year number:4 | |
| PR1001 | Payment of annual fee | St.27 status event code:A-4-4-U10-U11-oth-PR1001 Fee payment year number:5 | |
| PN2301 | Change of applicant | St.27 status event code:A-5-5-R10-R11-asn-PN2301 | |
| PN2301 | Change of applicant | St.27 status event code:A-5-5-R10-R14-asn-PN2301 | |
| PR1001 | Payment of annual fee | St.27 status event code:A-4-4-U10-U11-oth-PR1001 Fee payment year number:6 | |
| P22-X000 | Classification modified | St.27 status event code:A-4-4-P10-P22-nap-X000 | |
| PR1001 | Payment of annual fee | St.27 status event code:A-4-4-U10-U11-oth-PR1001 Fee payment year number:7 | |
| P22-X000 | Classification modified | St.27 status event code:A-4-4-P10-P22-nap-X000 | |
| PR1001 | Payment of annual fee | St.27 status event code:A-4-4-U10-U11-oth-PR1001 Fee payment year number:8 |