KR102802660B1 - Method for contacting the channel of unmanned aerial vehicle(uav) control and non-payload communications(cnpc) system - Google Patents
Method for contacting the channel of unmanned aerial vehicle(uav) control and non-payload communications(cnpc) systemDownload PDFInfo
- Publication number
- KR102802660B1 KR102802660B1KR1020160175379AKR20160175379AKR102802660B1KR 102802660 B1KR102802660 B1KR 102802660B1KR 1020160175379 AKR1020160175379 AKR 1020160175379AKR 20160175379 AKR20160175379 AKR 20160175379AKR 102802660 B1KR102802660 B1KR 102802660B1
- Authority
- KR
- South Korea
- Prior art keywords
- drone
- frequency
- cnpc
- station
- uplink
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L5/00—Arrangements affording multiple use of the transmission path
- H04L5/003—Arrangements for allocating sub-channels of the transmission path
- H04L5/0032—Distributed allocation, i.e. involving a plurality of allocating devices, each making partial allocation
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W16/00—Network planning, e.g. coverage or traffic planning tools; Network deployment, e.g. resource partitioning or cells structures
- H04W16/14—Spectrum sharing arrangements between different networks
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B7/00—Radio transmission systems, i.e. using radiation field
- H04B7/14—Relay systems
- H04B7/15—Active relay systems
- H04B7/155—Ground-based stations
- H04B7/15528—Control of operation parameters of a relay station to exploit the physical medium
- H04B7/15542—Selecting at relay station its transmit and receive resources
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L67/00—Network arrangements or protocols for supporting network services or applications
- H04L67/01—Protocols
- H04L67/10—Protocols in which an application is distributed across nodes in the network
- H04L67/104—Peer-to-peer [P2P] networks
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W48/00—Access restriction; Network selection; Access point selection
- H04W48/16—Discovering, processing access restriction or access information
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W72/00—Local resource management
- H04W72/20—Control channels or signalling for resource management
- H04W72/23—Control channels or signalling for resource management in the downlink direction of a wireless link, i.e. towards a terminal
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W84/00—Network topologies
- H04W84/02—Hierarchically pre-organised networks, e.g. paging networks, cellular networks, WLAN [Wireless Local Area Network] or WLL [Wireless Local Loop]
- H04W84/04—Large scale networks; Deep hierarchical networks
- H04W84/06—Airborne or Satellite Networks
Landscapes
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- Astronomy & Astrophysics (AREA)
- General Physics & Mathematics (AREA)
- Computer Security & Cryptography (AREA)
- Mobile Radio Communication Systems (AREA)
Abstract
Translated fromKoreanDescription
Translated fromKorean아래 실시예들은 무인기 CNPC 시스템의 채널 접속 방법에 관한 것이다.The examples below relate to channel access methods for an unmanned aerial vehicle CNPC system.
무인기(unmanned aerial vehicle(UAV), pilotless aircraft 또는 drone)와 함께 이륙/순항, 비행통제, 착륙/회수 등 제어용 통신 시스템(control communication system)을 포함한 전 비행 과정에 필요한 모든 구성 요소를 모두 포괄해 무인 항공 시스템(Unmanned Aircraft Systems(UAS)) 또는 원격 조종 항공 시스템(Remotely Piloted Aircraft Systems(RPAS))이라 한다.All components required for the entire flight process, including takeoff/cruise, flight control, landing/recovery, and control communication systems, along with an unmanned aerial vehicle (UAV), pilotless aircraft, or drone, are collectively called Unmanned Aircraft Systems (UAS) or Remotely Piloted Aircraft Systems (RPAS).
이러한 UAS는 무인기 지상 통제 장비, 무인기, 및 데이터 링크로 구성된다. 데이터 링크는 지상 무선국과 무인기 사이의 무선 데이터 링크로서 UAS 데이터 링크는 크게 UAS 지상 제어 및 비임무용 통신(Control and Non-Payload Communication(CNPC)) 데이터 링크와 UAS 임무용 링크로 구분할 수 있다.These UASs consist of unmanned ground control equipment, unmanned aircraft, and data links. The data link is a wireless data link between ground radio stations and unmanned aircraft. UAS data links can be broadly divided into UAS ground control and non-mission communication (Control and Non-Payload Communication (CNPC)) data links and UAS mission links.
임무용 데이터 링크는 임무 수행과 관련된 데이터를 전달하기 위한 링크로서 일반적으로 CNPC 데이터 링크에 비해 광대역이다. 반면, CNPC 링크는 무인기 비행 제어, UAS 상태 모니터링, CNPC 링크 관리와 관련된 데이터를 전달하기 위한 링크로서 조종사/ATC 중계 링크와 UAS 제어 링크로 구성된다. 조종사/ATC 중계 링크는 항공교통관제센터(Air Traffic Control(ATC))와 조종사 간의 음성 및 데이터를 무인기를 통해 중계하기 위한 통신 링크이며, UAS 제어 링크는 조종사와 무인기 사이의 안전 운항 관련 제어 정보를 전달하기 위한 링크이다. UAS 제어 링크의 경우, 다시 원격명령 (Telecommand(TC)) 링크와 원격측정(Telemetry(TM)) 링크로 구분할 수 있으며, TC 링크는 비행궤도 제어정보, 안전 비행에 요구되는 모든 무인기 시스템 제어 정보 등을 지상의 조종사로부터 무인기로 전달하는 상향링크이고, TM 링크는 무인항공기 위치·고도·속도, UAS 시스템 동작 모드 및 상태, 항법 보조 데이터, 탐지 및 회피 관련 추적·기상레이더·영상 정보를 무인기에서 지상의 조종사에게 전달하는 하향링크이다.The mission data link is a link for transmitting data related to mission execution and is generally wider than the CNPC data link. On the other hand, the CNPC link is a link for transmitting data related to UAV flight control, UAS status monitoring, and CNPC link management and consists of a pilot/ATC relay link and a UAS control link. The pilot/ATC relay link is a communication link for relaying voice and data between the Air Traffic Control (ATC) center and the pilot through the UAV, and the UAS control link is a link for transmitting control information related to safe operation between the pilot and the UAV. For the UAS control link, it can be divided again into a Telecommand (TC) link and a Telemetry (TM) link. The TC link is an uplink that transmits flight trajectory control information, all UAS system control information required for safe flight, etc. from the ground pilot to the UAV, and the TM link is a downlink that transmits UAV position, altitude, and speed, UAS system operation mode and status, navigation assistance data, and detection and avoidance-related tracking, weather radar, and image information from the UAV to the ground pilot.
무인기 지상 CNPC 링크를 위한 주파수로는 WRC-12에서 신규 전용 대역으로 분배된 C(5030-5091 MHz) 대역이 주로 고려되고 있으며, 이외에도 WRC-12에서 항공이동업무로 활용 가능하도록 기준이 마련된 L(960-1164 MHz) 대역과 같이 항공이동업무 분배된 대역이 고려될 수 있다. C 대역의 경우, 기존 시스템과의 주파수 혼신 영향 및 다중경로 지연 확산이 적은 장점이 있는데 반해 링크마진 확보를 위해 지향성 안테나 사용이 고려되어야 하고 도플러 영향이 L 대역에 비해 5배가 큰 단점이 있다. 이에 반해, L 대역과 같이 타 항공이동업무로 분배된 낮은 주파수 대역의 경우, C 대역에 비해 전파 특성이 좋으나 (L 대역의 경우 C 대역에 비해 14 dB 정도 전파 손실이 낮음), DME (Distance Measurement Equipment), ADS-B (Automatic Dependent Surveillance - Broadcast), TACAN (Tactic Air Navigation System) 등 기존 항공시스템이 혼잡하게 운용되고 있어 주파수 확보에 어려움 점이 있을 뿐만 아니라 다중경로 지연 확산이 큰 단점이 있다. 따라서 통상 기 확보된 C 대역을 지상 CNPC의 기본 링크로 고려하고, 낮은 주파수 대역(예를 들어, L 또는 UHF 대역 등)을 무인기 안전 운항을 위해 CNPC 링크 가용도를 높이는데 사용할 것으로 예상된다. 물론 반대로 사용하거나 독립적으로 사용할 수도 있다.The C (5030-5091 MHz) band, which was newly allocated as a dedicated band in WRC-12, is mainly being considered as a frequency for UAV ground CNPC links. In addition, bands allocated for aeronautical mobile services, such as the L (960-1164 MHz) band, for which standards were established for use in aeronautical mobile services in WRC-12, can be considered. The C band has the advantage of less frequency interference with existing systems and less multipath delay spread, but has the disadvantage that the use of directional antennas must be considered to secure link margin and the Doppler effect is five times greater than that of the L band. In contrast, low frequency bands allocated to other aviation mobile services, such as the L band, have better propagation characteristics than the C band (propagation loss is about 14 dB lower in the L band than in the C band), but there are difficulties in securing frequencies due to congested operation of existing aviation systems such as DME (Distance Measurement Equipment), ADS-B (Automatic Dependent Surveillance - Broadcast), and TACAN (Tactic Air Navigation System), and there is a disadvantage of large multipath delay spread. Therefore, it is expected that the secured C band will be considered the basic link for ground CNPC, and low frequency bands (such as the L or UHF band) will be used to increase CNPC link availability for safe operation of UAVs. Of course, it can be used conversely or independently.
다음으로 지상 CNPC 링크 접속 형태는 P2P(Point-to-Point)형과 P2MP(Point-to-MultiPoint)형이 있다. P2P 형은 1개 GRS가 1개 UA와 데이터 링크를 형성하는 개념으로 기존 무인항공시스템에서 주로 고려되었던 형태이다. 이에 반해, P2MP형은 하나의 GRS가 다수의 UA와 데이터 링크를 형성하는 개념으로 주로 P2MP형에서 GRS들은 네트워크로 연결되어 GRS 핸드오버를 지원한다. P2P형과 P2MP형 GRS 모두 네트워크에 연결되어 GRS 핸드오버 등 끊김없는 무인기 제어용 통신 서비스 제공하거나 단독 GRS 형태로 구축이 가능하다. 통상 P2P형이 경우 단독 GRS 형태로 구축되며 P2MP형의 경우 네트워크 기반의 GRS 구축이 전망된다. 다수 무인기와 동시에 통신링크를 형성하고 전국망을 형성할 수 있는 네트워크 기반의P2MP형이 차세대 CNPC 링크로 고려될 것으로 전망되며 이러한 P2MP형 UAS CNPC 시스템에 대한 관련 기술은 아직까지 미비한 상태이다.Next, the ground CNPC link connection types are P2P (Point-to-Point) and P2MP (Point-to-MultiPoint). The P2P type is a concept in which one GRS forms a data link with one UA, and is a type that has been mainly considered in existing unmanned aerial vehicle systems. In contrast, the P2MP type is a concept in which one GRS forms a data link with multiple UAs, and in the P2MP type, GRSs are mainly connected to a network to support GRS handover. Both P2P and P2MP GRSs can be connected to a network to provide seamless UAV control communication services such as GRS handover, or can be built as a standalone GRS. Usually, the P2P type is built as a standalone GRS, and the P2MP type is expected to be built as a network-based GRS. The network-based P2MP type, which can form communication links with multiple UAVs at the same time and form a nationwide network, is expected to be considered as the next-generation CNPC link, but the related technology for this P2MP type UAS CNPC system is still insufficient.
또한, 기존의 P2P형 UAS CNPC 시스템 운용을 위해서는 CNPC용 채널을 할당 받아야 하는데 기존의 방식에서는 주파수 관할청(Spectrum Authority(SA))에서 UAS CNPC 시스템 등록 시 채널을 오랜 시간(통산 1년 이상) 동안 고정적으로 할당하기 때문에 한번 특정 UAS CNPC 시스템에 할당된 채널은 다른 UAS CNPC 시스템에 활용이 어렵다.In addition, in order to operate the existing P2P type UAS CNPC system, a CNPC channel must be allocated. However, in the existing method, the Spectrum Authority (SA) allocates channels for a long period of time (over 1 year in total) when registering the UAS CNPC system. Therefore, once a channel is allocated to a specific UAS CNPC system, it is difficult to use it for other UAS CNPC systems.
따라서, 무인기의 안정적 운용 및 무인기 수요 확대를 위해서는 제한된 무인기 제어 전용 주파수 대역에서 다수의 무인기를 효율적으로 운용할 수 있는 무인기 제어용 통신 주파수 자원의 효율적 활용이 가능하도록 무인기 CNPC 시스템(UAV CNPC SYSTEM)이 동작하는 것이 필수적으로 요구된다.Therefore, in order to ensure stable operation of drones and expand demand for drones, it is essential to operate a UAV CNPC system that can efficiently utilize communication frequency resources for drone control, allowing efficient operation of multiple drones in a limited drone control-only frequency band.
무인기의 안정적 운용 및 무인기 수요 확대를 위해서는 제한된 무인기 제어용 주파수 대역에서 다수의 무인기를 효율적으로 운용할 수 있는 무인기 제어용 통신 시스템 설계 및 동작 기술이 필요하다. 주파수 관할청이 특정 주파수를 고정적으로 특정 CNPC 시스템에 할당하지 않고 전제 주파수를 주파수 관할청이 실시간으로 관리하면서 UAS CNPC 시스템 운용 시에만 동적으로 할당해주고 운용 완료 후 바로 회수하여 다른 UAS CNPC 시스템에서 그 주파수를 재사용할 수 있도록 하는 동적 채널 할당 및 관리가 필수적으로 요구되고 무인기 CNPC 시스템은 이러한 동적 채널 할당 및 관리를 지원해야 한다.In order to operate UAVs stably and expand the demand for UAVs, it is necessary to design and operate a UAV control communication system that can efficiently operate multiple UAVs in a limited UAV control frequency band. Dynamic channel allocation and management are essential, in which the frequency management authority does not fixally allocate a specific frequency to a specific CNPC system, but dynamically allocates the entire frequency in real time only when the UAS CNPC system is operating, and immediately recovers the frequency after the operation is completed so that it can be reused by other UAS CNPC systems. The UAS CNPC system must support such dynamic channel allocation and management.
이러한 동적 채널 할당 및 관리 방법에 따라 동적으로 할당되는 무인기 제어용 주파수를 CNPC 시스템에 설정하고 접속하는 방법이 필요하다. 본 발명에서는 주파수 관할청으로부터 할당된 주파수를 설정하고, 무인기국이 지상국에 접속하는 동작 방법을 제안한다.According to this dynamic channel allocation and management method, a method is needed to set and connect a frequency for controlling a drone that is dynamically allocated to a CNPC system. The present invention proposes an operation method for setting a frequency allocated from a frequency management authority and connecting a drone station to a ground station.
일 실시예에 무인기 CNPC 접속 방법은 따른 상향링크 주파수 및 하향링크 주파수를 지상국과 무인기국에 설정하는 단계와, 및 상기 지상국 및 상기 무인기국이 상기 상향링크 주파수 또는 상기 하향링크 주파수를 사용하여 초기 접속을 수행하는 단계를 포함한다.In one embodiment, a drone CNPC access method includes a step of setting an uplink frequency and a downlink frequency to a ground station and a drone station, and a step of the ground station and the drone station performing an initial access using the uplink frequency or the downlink frequency.
상기 설정하는 단계는, 통제소가 상기 상향링크 주파수 및 상기 하향링크 주파수를 주파수 관할청으로부터 획득하는 단계와, 및 상기 통제소가 상기 상향링크 주파수 및 상기 하향링크 주파수를 상기 지상국과 상기 무인기국에 설정하는 단계를 포함할 수 있다.The above-mentioned setting step may include a step in which the control center obtains the uplink frequency and the downlink frequency from a frequency management authority, and a step in which the control center sets the uplink frequency and the downlink frequency to the ground station and the unmanned aerial vehicle station.
상기 설정하는 단계는, 상기 통제소가 상기 상향링크 주파수 및 상기 하향링크 주파수를 상기 지상국과 상기 무인기국에 전송하는 단계와, 및 상기 지상국과 상기 무인기국이 상기 상향링크 주파수 및 상기 하향링크 주파수를 설정하는 단계를 포함할 수 있다.The above-described setting step may include a step in which the control station transmits the uplink frequency and the downlink frequency to the ground station and the drone station, and a step in which the ground station and the drone station set the uplink frequency and the downlink frequency.
상기 전송하는 단계는, 상기 통제소가 할당 주파수 전송 메시지를 상기 지상국과 상기 무인기국에 전송하는 단계를 포함하고, 상기 할당 주파수 전송 메시지는, 상기 상향링크 주파수, 상향링크 데이터 클래스(DC), 상기 하향링크 주파수, 하향링크 데이터 클래스(DC), 무인기 ID를 포함할 수 있다.The above transmitting step includes a step in which the control station transmits an allocation frequency transmission message to the ground station and the drone station, and the allocation frequency transmission message may include the uplink frequency, the uplink data class (DC), the downlink frequency, the downlink data class (DC), and the drone ID.
상기 무인기 ID는 CRC(Cyclic Redundancy Check)에 스크램블링(scrambling)을 수행하여 획득될 수 있다.The above drone ID can be obtained by performing scrambling on the CRC (Cyclic Redundancy Check).
상기 설정하는 단계는, 상기 무인기국이 할당 가능한 모든 중심 주파수에 대하여 신호 에너지를 측정하는 단계와, 상기 신호 에너지가 임계 값 이상인 적어도 하나의 중심 주파수를 선택하는 단계와, 및 상기 무인기국이 상기 적어도 하나의 중심 주파수에 기초하여 상기 상향링크 주파수 및 상기 하향링크 주파수를 설정하는 단계를 포함할 수 있다.The setting step may include a step of measuring signal energy for all center frequencies assignable by the drone, a step of selecting at least one center frequency having the signal energy equal to or greater than a threshold value, and a step of setting the uplink frequency and the downlink frequency by the drone based on the at least one center frequency.
상기 측정하는 단계는, 상기 무인기국이 상기 할당 가능한 모든 중심 주파수에 대하여 할당 가능한 가장 작은 대역폭의 크기로 상기 신호 에너지를 측정하는 단계를 포함할 수 있다.The above measuring step may include a step in which the drone measures the signal energy in a size of the smallest bandwidth allocatable for all the allocatable center frequencies.
상기 무인기국이 상기 적어도 하나의 중심 주파수에 기초하여 상기 상향링크 주파수 및 상기 하향링크 주파수를 설정하는 단계는, 상기 적어도 하나의 중심 주파수를 신호 에너지가 높은 순서로 정렬하는 단계와, 상기 무인기국이 높은 상기 적어도 하나의 중심 주파수에 대해서 수신한 할당 주파수 정보 메시지의 무인기 ID를 검증(verify)하는 단계와, 및 상기 무인기 ID가 실제 무인기의 ID와 일치하는 경우, 상기 무인기국이 상기 주파수 정보 메시지에 기초하여 상기 상향링크 주파수 및 상기 하향링크 주파수를 설정하는 단계를 포함할 수 있다.The step of setting the uplink frequency and the downlink frequency by the drone based on the at least one center frequency may include the steps of arranging the at least one center frequency in order of high signal energy, the step of verifying a drone ID of an allocated frequency information message received by the drone for the at least one high center frequency, and the step of setting the uplink frequency and the downlink frequency by the drone based on the frequency information message when the drone ID matches an ID of an actual drone.
상기 설정하는 단계는, 주파수 관할청이 상기 무인기국에 할당된 상기 상향링크 주파수 및 상기 하향링크 주파수를 CNPC 네트워크에 통지하는 단계와, 및 상기 CNPC 네트워크가 상기 지상국에 상기 상향링크 주파수 및 상기 하향링크 주파수를 설정하는 단계를 포함할 수 있다.The above-described setting step may include a step in which the frequency management authority notifies the CNPC network of the uplink frequency and the downlink frequency allocated to the drone station, and a step in which the CNPC network sets the uplink frequency and the downlink frequency to the ground station.
다른 실시예에 따른 무인기 CNPC 접속 방법은 상향링크의 슬롯 및 하향링크 주파수를 지상국과 무인기국에 설정하는 단계와, 및 상기 지상국 및 상기 무인기국이 상기 상향링크의 슬롯 또는 상기 하향링크 주파수를 사용하여 초기 접속을 수행하는 단계를 포함한다.A drone CNPC connection method according to another embodiment includes a step of setting an uplink slot and a downlink frequency to a ground station and a drone station, and a step of the ground station and the drone station performing an initial connection using the uplink slot or the downlink frequency.
상기 설정하는 단계는, 통제소가 상기 상향링크의 슬롯 및 상기 하향링크 주파수를 주파수 관할청으로부터 획득하는 단계와, 및 상기 통제소가 상기 상향링크의 슬롯 및 상기 하향링크 주파수를 상기 지상국과 상기 무인기국에 설정하는 단계를 포함할 수 있다.The above-mentioned setting step may include a step in which the control center obtains the slot of the uplink and the downlink frequency from a frequency management authority, and a step in which the control center sets the slot of the uplink and the downlink frequency to the ground station and the unmanned aerial vehicle station.
상기 설정하는 단계는, 상기 통제소가 상기 상향링크의 슬롯 및 상기 하향링크 주파수를 상기 지상국과 상기 무인기국에 전송하는 단계와, 및 상기 지상국과 상기 무인기국이 상기 상향링크의 슬롯 및 상기 하향링크 주파수를 설정하는 단계를 포함할 수 있다.The above-described setting step may include a step in which the control station transmits the slot of the uplink and the downlink frequency to the ground station and the drone station, and a step in which the ground station and the drone station set the slot of the uplink and the downlink frequency.
상기 전송하는 단계는, 상기 통제소가 할당 주파수 전송 메시지를 상기 지상국과 상기 무인기국에 전송하는 단계를 포함하고, 상기 할당 주파수 전송 메시지는, 상기 상향링크 주파수, 상향링크 대역폭, 상향링크 데이터 클래스(DC), 상기 상향링크의 슬롯의 위치, 상기 하향링크 주파수, 하향링크 데이터 클래스(DC), 무인기 ID를 포함할 수 있다.The above transmitting step includes a step in which the control station transmits an allocation frequency transmission message to the ground station and the drone station, and the allocation frequency transmission message may include the uplink frequency, the uplink bandwidth, the uplink data class (DC), the position of the slot of the uplink, the downlink frequency, the downlink data class (DC), and the drone ID.
상기 무인기 ID는 CRC에 스크램블링을 수행하여 획득될 수 있다.The above drone ID can be obtained by performing scrambling on the CRC.
상기 설정하는 단계는, 상기 무인기국이 할당 가능한 모든 중심 주파수에 대하여 신호 에너지를 측정하는 단계와, 상기 신호 에너지가 임계 값 이상인 적어도 하나의 중심 주파수를 선택하는 단계와, 및 상기 무인기국이 상기 적어도 하나의 중심 주파수에 기초하여 상기 상향링크의 슬롯 및 상기 하향링크 주파수를 설정하는 단계를 포함할 수 있다.The above-described setting step may include a step of measuring signal energy for all center frequencies assignable by the drone, a step of selecting at least one center frequency having the signal energy equal to or greater than a threshold value, and a step of setting, by the drone, a slot of the uplink and a frequency of the downlink based on the at least one center frequency.
상기 측정하는 단계는, 상기 무인기국이 상기 할당 가능한 모든 중심 주파수에 대하여 할당 가능한 가장 작은 대역폭의 크기로 상기 신호 에너지를 측정하는 단계를 포함할 수 있다.The above measuring step may include a step in which the drone measures the signal energy in a size of the smallest bandwidth allocatable for all the allocatable center frequencies.
상기 무인기국이 상기 적어도 하나의 중심 주파수에 기초하여 상기 상향링크의 슬롯 및 상기 하향링크 주파수를 설정하는 단계는, 상기 적어도 하나의 중심 주파수를 신호 에너지가 높은 순서로 정렬하는 단계와, 상기 무인기국이 높은 상기 적어도 하나의 중심 주파수에 대해서 수신한 할당 주파수 정보 메시지의 무인기 ID를 검증하는 단계와, 및 상기 무인기 ID가 실제 무인기의 ID와 일치하는 경우, 상기 무인기국이 상기 주파수 정보 메시지에 기초하여 상기 상향링크의 슬롯 및 상기 하향링크 주파수를 설정하는 단계를 포함할 수 있다.The step of the drone station setting the slot of the uplink and the downlink frequency based on the at least one center frequency may include the steps of: arranging the at least one center frequency in order of high signal energy; the step of the drone station verifying the drone ID of the allocated frequency information message received for the at least one high center frequency; and the step of the drone station setting the slot of the uplink and the downlink frequency based on the frequency information message when the drone ID matches the ID of an actual drone.
상기 설정하는 단계는, 주파수 관할청이 상기 무인기국에 할당된 상기 상향링크의 슬롯 및 상기 하향링크 주파수를 CNPC 네트워크에 통지하는 단계와, 및 상기 CNPC 네트워크가 상기 지상국에 상기 상향링크의 슬롯 및 상기 하향링크 주파수를 설정하는 단계를 포함할 수 있다.The above-described setting step may include a step in which the frequency management authority notifies the CNPC network of the slot of the uplink and the downlink frequency allocated to the drone station, and a step in which the CNPC network sets the slot of the uplink and the downlink frequency to the ground station.
도 1은 일 실시예에 따른 무인기 CNPC 시스템에서 무인기의 안정적 운용을 위해 주변 시스템과의 관계 및 정보 교환의 일 예를 나타낸다.
도 2는 일 실시예에 따른 무인기 CNPC 시스템에서 무인기의 안정적 운용을 위해 주변 시스템 사이의 관계 및 정보 교환의 다른 예를 나타낸다.
도 3은 일 실시예에 따른 무인기 CNPC 시스템의 블록도의 일 예를 나타낸다.
도 4는 도 3에 도시된 지상국이 할당 주파수 정보를 전송하는 동작의 일 예를 설명하기 위한 도면이다.
도 5는 할당 주파수 정보의 일 예를 나타낸다.
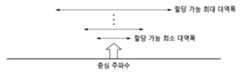
도 6은 무인기 제어용 주파수에서의 할당 가능한 중심주파수를 설명하기 위한 도면이다.
도 7은 무인기 제어용 중심주파수에서 할당 가능한 대역폭 크기를 설명하기 위한 도면이다.
도 8은 도 3에 도시된 무인기국이 할당 주파수 정보를 획득하는 동작의 일 예를 설명한다.Figure 1 illustrates an example of relationships and information exchange with peripheral systems for stable operation of a drone in a drone CNPC system according to one embodiment.
FIG. 2 illustrates another example of relationships and information exchange between peripheral systems for stable operation of a drone in a drone CNPC system according to one embodiment.
FIG. 3 illustrates an example of a block diagram of an unmanned aerial vehicle CNPC system according to one embodiment.
FIG. 4 is a diagram for explaining an example of an operation in which the ground station illustrated in FIG. 3 transmits allocated frequency information.
Figure 5 shows an example of allocated frequency information.
Figure 6 is a diagram for explaining the assignable center frequencies in the drone control frequency.
Figure 7 is a diagram for explaining the bandwidth size that can be allocated at the center frequency for drone control.
Figure 8 illustrates an example of the operation of the unmanned aerial vehicle illustrated in Figure 3 to obtain allocated frequency information.
본 명세서에서 개시되어 있는 본 발명의 개념에 따른 실시예들에 대해서 특정한 구조적 또는 기능적 설명들은 단지 본 발명의 개념에 따른 실시예들을 설명하기 위한 목적으로 예시된 것으로서, 본 발명의 개념에 따른 실시예들은 다양한 형태로 실시될 수 있으며 본 명세서에서 설명된 실시예들에 한정되지 않는다.Specific structural or functional descriptions of embodiments according to the concept of the present invention disclosed in this specification are merely exemplified for the purpose of explaining embodiments according to the concept of the present invention, and embodiments according to the concept of the present invention can be implemented in various forms and are not limited to the embodiments described in this specification.
본 발명의 개념에 따른 실시예들은 다양한 변경들을 가할 수 있고 여러 가지 형태들을 가질 수 있으므로 실시예들을 도면에 예시하고 본 명세서에 상세하게 설명하고자 한다. 그러나, 이는 본 발명의 개념에 따른 실시예들을 특정한 개시형태들에 대해 한정하려는 것이 아니며, 본 발명의 사상 및 기술 범위에 포함되는 변경, 균등물, 또는 대체물을 포함한다.The embodiments according to the concept of the present invention can have various changes and can have various forms, so the embodiments are illustrated in the drawings and described in detail in this specification. However, this is not intended to limit the embodiments according to the concept of the present invention to specific disclosed forms, but includes changes, equivalents, or substitutes included in the spirit and technical scope of the present invention.
제1 또는 제2 등의 용어를 다양한 구성요소들을 설명하는데 사용될 수 있지만, 상기 구성요소들은 상기 용어들에 의해 한정되어서는 안 된다. 상기 용어들은 하나의 구성요소를 다른 구성요소로부터 구별하는 목적으로만, 예를 들어 본 발명의 개념에 따른 권리 범위로부터 이탈되지 않은 채, 제1 구성요소는 제2 구성요소로 명명될 수 있고, 유사하게 제2 구성요소는 제1 구성요소로도 명명될 수 있다.Although the terms first or second may be used to describe various components, the components should not be limited by the terms. The terms are only intended to distinguish one component from another, for example, without departing from the scope of the invention, a first component may be referred to as a second component, and similarly, a second component may also be referred to as a first component.
어떤 구성요소가 다른 구성요소에 "연결되어" 있다거나 "접속되어" 있다고 언급된 때에는, 그 다른 구성요소에 직접적으로 연결되어 있거나 또는 접속되어 있을 수도 있지만, 중간에 다른 구성요소가 존재할 수도 있다고 이해되어야 할 것이다. 반면에, 어떤 구성요소가 다른 구성요소에 "직접 연결되어" 있다거나 "직접 접속되어" 있다고 언급된 때에는, 중간에 다른 구성요소가 존재하지 않는 것으로 이해되어야 할 것이다. 구성요소들 간의 관계를 설명하는 표현들, 예를 들어 "~사이에"와 "바로~사이에" 또는 "~에 이웃하는"과 "~에 직접 이웃하는" 등도 마찬가지로 해석되어야 한다.When it is said that an element is "connected" or "connected" to another element, it should be understood that it may be directly connected or connected to that other element, but that there may be other elements in between. On the other hand, when it is said that an element is "directly connected" or "directly connected" to another element, it should be understood that there are no other elements in between. Expressions that describe the relationship between elements, such as "between" and "directly between" or "adjacent to" and "directly adjacent to", should be interpreted similarly.
본 명세서에서 사용한 용어는 단지 특정한 실시예들을 설명하기 위해 사용된 것으로, 본 발명을 한정하려는 의도가 아니다. 단수의 표현은 문맥상 명백하게 다르게 뜻하지 않는 한, 복수의 표현을 포함한다. 본 명세서에서, "포함하다" 또는 "가지다" 등의 용어를 설시된 특징, 숫자, 단계, 동작, 구성요소, 부분품 또는 이들을 조합한 것이 존재함으로 지정하려는 것이지, 하나 또는 그 이상의 다른 특징들이나 숫자, 단계, 동작, 구성요소, 부분품 또는 이들을 조합한 것들의 존재 또는 부가 가능성을 미리 배제하지 않는 것으로 이해되어야 한다.The terminology used herein is for the purpose of describing particular embodiments only and is not intended to be limiting of the present invention. The singular expression includes the plural expression unless the context clearly indicates otherwise. It should be understood that, as used herein, the terms "comprises" or "has" are intended to specify the presence of a stated feature, number, step, operation, component, part, or combination thereof, but do not exclude in advance the possibility of the presence or addition of one or more other features, numbers, steps, operations, components, parts, or combinations thereof.
다르게 정의되지 않는 한, 기술적이거나 과학적인 용어를 포함해서 여기서 사용되는 모든 용어들은 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자에 의해 일반적으로 이해되는 것과 동일한 의미를 가진다. 일반적으로 사용되는 사전에 정의되어 있는 것과 같은 용어들은 관련 기술의 문맥상 가지는 의미와 일치하는 의미를 갖는 것으로 해석되어야 하며, 본 명세서에서 명백하게 정의하지 않는 한, 이상적이거나 과도하게 형식적인 의미로 해석되지 않는다.Unless otherwise defined, all terms used herein, including technical or scientific terms, have the same meaning as commonly understood by one of ordinary skill in the art to which this invention belongs. Terms defined in commonly used dictionaries, such as those defined in common usage, should be interpreted as having a meaning consistent with the meaning they have in the context of the relevant art, and will not be interpreted in an idealized or overly formal sense unless explicitly defined herein.
이하, 실시예들을 첨부된 도면을 참조하여 상세하게 설명한다. 그러나, 특허출원의 범위가 이러한 실시예들에 의해 제한되거나 한정되는 것은 아니다. 각 도면에 제시된 동일한 참조 부호는 동일한 부재를 나타낸다.Hereinafter, embodiments will be described in detail with reference to the attached drawings. However, the scope of the patent application is not limited or restricted by these embodiments. The same reference numerals presented in each drawing represent the same components.
도 1은 일 실시예에 따른 무인기 CNPC 시스템에서 무인기의 안정적 운용을 위해 주변 시스템과의 관계 및 정보 교환의 일 예를 나타낸다.Figure 1 illustrates an example of relationships and information exchange with surrounding systems for stable operation of a drone in a drone CNPC system according to one embodiment.
도 1을 참조하면, 무인기 CNPC 시스템(UAV CNPC SYSTEM; 10)은 주파수 관할청(Spectrum Authority(SA); 110), 항공 교통 관제센터(Air Traffic Control(ATC); 120), 통제소(ground control equipment; 130), CNPC 지상국 시스템(ground CNPC radio system; 140), 및 CNPC 무인기국 시스템(airborne CNPC radio system; 150)을 포함한다.Referring to FIG. 1, the UAV CNPC system (UAV CNPC SYSTEM; 10) includes a Spectrum Authority (SA; 110), an Air Traffic Control (ATC) center (120), ground control equipment (130), a CNPC ground station system (ground CNPC radio system; 140), and a CNPC airborne CNPC radio system (150).
무인기 CNPC 시스템(10)은 Point-to-Point(P2P)형으로 무인기(190)를 제어하는 무인기 CNPC 시스템일 수 있다. 무인기(190)는 Video, Flight Control, 및 VHF/Radio와 같은 구성 중 적어도 하나를 포함할 수 있다.The drone CNPC system (10) may be a drone CNPC system that controls a drone (190) in a Point-to-Point (P2P) type. The drone (190) may include at least one of the following components: Video, Flight Control, and VHF/Radio.
P2P 무인기 CNPC 시스템 운용을 위해서, 통제소(130)는 SA(110)으로 채널을 요청하고, SA(110)로부터 채널 할당(K1)을 받을 수 있다.To operate the P2P drone CNPC system, the control center (130) can request a channel to SA (110) and receive a channel allocation (K1) from SA (110).
다음으로, 통제소(130)는 지상/무인기 CNPC Radio 채널 할당 정보 및 상태 정보(G1)와 ATC(120)와의 통신 데이터 및 무인기 제어 데이터를 포함하는 정보(F1)를 Distribution 시스템을 통해 CNPC 지상국 시스템(140)으로 전송(H1)할 수 있다.Next, the control center (130) can transmit (H1) information (F1) including ground/drone CNPC radio channel allocation information and status information (G1) and communication data with ATC (120) and drone control data to the CNPC ground station system (140) through the distribution system.
CNPC 지상국 시스템(140)은 ATC(120)와의 통신 데이터 및 무인기 제어 데이터를 포함하는 정보(A1)를 Flight Control 및 VHF/Radio로 전달할 수 있다. 무인기 제어 데이터는 무인기 Telemetry 및 비디오 영상 데이터를 포함할 수 있다. ATC(120)와의 통신 데이터 및 무인기 제어 데이터를 포함하는 정보(A1)는 ATC(120)와의 통신 데이터 및 무인기 제어 데이터를 포함하는 정보(F1)와 실질적으로 동일할 수 있다. 또한, CNPC 지상국 시스템(140)은 CNPC 무인기국 상태 정보(Airborne Radio Status information; B1)를 Flight Control로 전달할 수 있다.The CNPC ground station system (140) can transmit information (A1) including communication data with ATC (120) and drone control data to Flight Control and VHF/Radio. The drone control data can include drone Telemetry and video image data. The information (A1) including communication data with ATC (120) and drone control data can be substantially the same as the information (F1) including communication data with ATC (120) and drone control data. In addition, the CNPC ground station system (140) can transmit CNPC drone status information (Airborne Radio Status information; B1) to Flight Control.
CNPC 무인기국 시스템(150)은 ATC(120)와의 통신 데이터 및 무인기 제어 데이터를 포함하는 정보(A1)를 CNPC 지상국 시스템(140)으로 전달할 수 있다. CNPC 지상국 시스템(140)은 CNPC 무인기국 시스템(150)으로부터 전달받은 정보(F1)와 CNPC Radio 채널 할당 정보 및 상태 정보(G1)를 유무선 네트워크를 통해 통제소(130)로 전달(H1)할 수 있다. 이하에서는 무인기 CNPC 시스템(10)의 특성에 대하여 설명한다.The CNPC unmanned aerial vehicle system (150) can transmit information (A1) including communication data with ATC (120) and unmanned aerial vehicle control data to the CNPC ground station system (140). The CNPC ground station system (140) can transmit information (F1) received from the CNPC unmanned aerial vehicle system (150) and CNPC radio channel allocation information and status information (G1) to the control center (130) via a wired or wireless network (H1). Hereinafter, the characteristics of the unmanned aerial vehicle CNPC system (10) will be described.
무인기 CNPC 시스템(10)은 다음과 같은 링크 구성으로 동작할 수 있다.The unmanned aerial vehicle CNPC system (10) can operate with the following link configuration.
1) 무인기 CNPC 시스템(10)은 다수 쌍의 지상국과 무인기국을 포함하고, 각각의 지상국과 무인기국은 일대일 통신링크를 형성할 수 있다.1) The drone CNPC system (10) includes multiple pairs of ground stations and drone stations, and each ground station and drone station can form a one-to-one communication link.
2) 무인기 CNPC 시스템(10)이 Standalone 시스템일 경우, 무인기 CNPC 시스템(10)은 통제소의 지상 무선국(Ground Radio Station(GRS)) 절체 및 통제권 이관을 통해 커버리지를 확장할 수 있다.2) If the drone CNPC system (10) is a standalone system, the drone CNPC system (10) can expand coverage through switching and transfer of control rights to the ground radio station (GRS) of the control center.
3) 무인기 CNPC 시스템(10)은 FDMA기반 지상국을 구현하여 1개의 지상국에서 다수 P2P형 무인기 지원을 수행할 수 있다.3) The drone CNPC system (10) implements an FDMA-based ground station and can support multiple P2P-type drones from a single ground station.
무인기 CNPC 시스템(10)의 상향링크 채널 및 하향링크 채널은 다음과 같은 구성으로 동작할 수 있다.The uplink channel and downlink channel of the unmanned aerial vehicle CNPC system (10) can operate with the following configuration.
1) 무인기 CNPC 시스템(10)은 상향링크(지상국 -> 무인기국) 및 하향링크(무인기국 -> 지상국)에서 FDMA 채널로 동작할 수 있다.1) The drone CNPC system (10) can operate on an FDMA channel in the uplink (ground station -> drone station) and downlink (drone station -> ground station).
2) 무인기 CNPC 시스템(10)은 이중 대역 채널(예를 들어, L 대역 및 C 대역)에서 동시 송수신을 지원할 수 있다.2) The drone CNPC system (10) can support simultaneous transmission and reception in dual-band channels (e.g., L band and C band).
3) 무인기 CNPC 시스템(10)은 다수의 채널 대역폭(예를 들어, 30/60/90/120 kHz를 가지는 4개의 Data Class (DC1))을 지원할 수 있다.3) The drone CNPC system (10) can support multiple channel bandwidths (e.g., four Data Classes (DC1) having 30/60/90/120 kHz).
4) 무인기 CNPC 시스템(10)은 링크 방향 및 대역 별 다른 지원 채널 대역폭 수를 지원한다.4) The drone CNPC system (10) supports different numbers of supported channel bandwidths for each link direction and band.
5) 무인기 CNPC 시스템(10)은 상향링크에서 DC1, DC2, 또는 DC3를 지원하고, 하향링크에서: DC1, DC2, DC3, DC4, DC5, 또는 DC6 지원할 수 있다.5) The drone CNPC system (10) can support DC1, DC2, or DC3 in the uplink, and: DC1, DC2, DC3, DC4, DC5, or DC6 in the downlink.
6) 무인기 CNPC 시스템(10)의 무인기국은 2개 FDMA 채널의 동시 송신을 지원할 수 있다. 예를 들어, 2개 FDMA 채널은 무인기 제어용으로 DC1~DC4 중 1개의 채널과 안전 비디오 용으로 DC5~DC6 중 1개의 채널일 수 있다.6) The drone station of the drone CNPC system (10) can support simultaneous transmission of two FDMA channels. For example, the two FDMA channels can be one channel among DC1 to DC4 for drone control and one channel among DC5 to DC6 for safety video.
7) 무인기 CNPC 시스템(10)은 채널 재할당 및 핸드오버 이외에는 고정 채널에서 동작할 수 있다.7) The drone CNPC system (10) can operate on a fixed channel except for channel reallocation and handover.
도 2는 일 실시예에 따른 무인기 CNPC 시스템에서 무인기의 안정적 운용을 위해 주변 시스템 사이의 관계 및 정보 교환의 다른 예를 나타낸다.FIG. 2 illustrates another example of relationships and information exchange between peripheral systems for stable operation of a drone in a drone CNPC system according to one embodiment.
도 2를 참조하면, 무인기 CNPC 시스템(20)은 SA(210), ATC(220), 통제소(230-1~230-N), CNPC 지상국 시스템(240), 및 CNPC 무인기국 시스템(250-1~250-3)을 포함한다. 무인기 CNPC 시스템(20)은 Point-to-Multi-Point(P2MP)형으로 무인기(290-1~290-3)를 제어하는 무인기 CNPC 시스템일 수 있다. 무인기(290-1~290-3)는 Video, Flight Control, 및 VHF/Radio와 같은 구성 중 적어도 하나를 포함할 수 있다.Referring to FIG. 2, the drone CNPC system (20) includes SA (210), ATC (220), control stations (230-1 to 230-N), CNPC ground station system (240), and CNPC drone station system (250-1 to 250-3). The drone CNPC system (20) may be a drone CNPC system that controls drones (290-1 to 290-3) in a Point-to-Multi-Point (P2MP) type. The drones (290-1 to 290-3) may include at least one of the following components: Video, Flight Control, and VHF/Radio.
SA(210), ATC(220), 통제소(230-1~230-N), CNPC 지상국 시스템(240), 및 CNPC 무인기국 시스템(250-1~250-3)은 도 1에 도시된 SA(110), ATC(120), 통제소(130), CNPC 지상국 시스템(140), 및 CNPC 무인기국 시스템(150)의 구성 및 동작이 실질적으로 동일할 수 있다.The SA (210), ATC (220), control station (230-1 to 230-N), CNPC ground station system (240), and CNPC unmanned aerial vehicle system (250-1 to 250-3) may have substantially the same configuration and operation as the SA (110), ATC (120), control station (130), CNPC ground station system (140), and CNPC unmanned aerial vehicle system (150) illustrated in FIG. 1.
도 2에서는 설명의 편의상 3개의 CNPC 무인기국 시스템(250-1~250-3) 및 3 개의 무인기(290-1~290-3)를 도시하였으나, 반드시 이에 한정되지 않고, 복수 개의 무인기국 시스템 및 복수 개의 무인기로 구현될 수 있다.In Fig. 2, for convenience of explanation, three CNPC unmanned air station systems (250-1 to 250-3) and three unmanned aircrafts (290-1 to 290-3) are illustrated, but the present invention is not limited thereto and may be implemented with multiple unmanned air station systems and multiple unmanned aircrafts.
P2MP형 무인기 CNPC 시스템 운용을 위해서, 통제소(230-1~230-N)는 SA(210)로 채널 요청을 하고 SA(210)로부터 채널 할당(K1)을 받을 수 있다.For operation of the P2MP type unmanned aerial vehicle CNPC system, the control center (230-1 to 230-N) can make a channel request to SA (210) and receive a channel allocation (K1) from SA (210).
다음으로, 통제소(230-1~230-N)는 ATC(220)와의 통신 데이터 및 무인기 제어 데이터를 포함하는 정보(F1)를 Distribution 시스템을 통해 CNPC 지상국 시스템(240)으로 전송(H1~Hn)할 수 있다. SA(210)는 각 무인기 채널 할당 정보(K1~Kn)를 CNPC 지상국 시스템(240)으로 전송할 수 있다. CNPC 지상국 시스템(240)은 통제소(230-1~230-N)부터 전달받은 ATC(120)와의 통신 데이터 및 무인기 제어 데이터를 포함하는 정보(A1~An)를 각 통제소(230-1~230-N)가 제어하는 무인기(290-1~290-3)의 Flight Control 및 VHF/Radio로 전달할 수 있다. 무인기 제어 데이터는 무인기 Telemetry 및 비디오 영상 데이터를 포함할 수 있다. ATC(120)와의 통신 데이터 및 무인기 제어 데이터를 포함하는 정보(A1~An)는 ATC(120)와의 통신 데이터 및 무인기 제어 데이터를 포함하는 정보(F1~Fn)와 실질적으로 동일할 수 있다. 또한, CNPC 지상국 시스템(240)은 CNPC 무인기국 상태 정보(B1~Bn)를 Flight Control로 전달할 수 있다.Next, the control stations (230-1 to 230-N) can transmit (H1 to Hn) information (F1) including communication data with the ATC (220) and drone control data to the CNPC ground station system (240) through the Distribution system. The SA (210) can transmit each drone channel allocation information (K1 to Kn) to the CNPC ground station system (240). The CNPC ground station system (240) can transmit information (A1 to An) including communication data with the ATC (120) and drone control data received from the control stations (230-1 to 230-N) to the Flight Control and VHF/Radio of the drones (290-1 to 290-3) controlled by each control station (230-1 to 230-N). The drone control data can include drone Telemetry and video image data. Information (A1 to An) including communication data with ATC (120) and drone control data may be substantially identical to information (F1 to Fn) including communication data with ATC (120) and drone control data. In addition, the CNPC ground station system (240) may transmit CNPC drone station status information (B1 to Bn) to Flight Control.
CNPC 무인기국 시스템(250-1~250-3)은 VHF/UHF Radio로부터 중계되는 ATC(120)와의 통신 데이터 및 무인기 제어 데이터를 포함하는 정보(A1~An)를 CNPC 지상국 시스템(240)으로 전달할 수 있다. CNPC 지상국 시스템(240)은 다수의 CNPC 무인기국 시스템(250-1~250-3)으로부터 전달받은 정보(F1~Fn)와 CNPC Radio 채널 할당 정보 및 상태 정보(G1~ Gn)를 유무선 네트워크를 통해 해당 통제소(230-1~230-N)로 전달(H1~Hn)할 수 있다.CNPC unmanned aerial vehicle systems (250-1 to 250-3) can transmit information (A1 to An) including communication data with ATC (120) and unmanned aerial vehicle control data relayed from VHF/UHF Radio to CNPC ground station system (240). CNPC ground station system (240) can transmit information (F1 to Fn) received from multiple CNPC unmanned aerial vehicle systems (250-1 to 250-3) and CNPC Radio channel allocation information and status information (G1 to Gn) to the corresponding control center (230-1 to 230-N) via wired and wireless networks (H1 to Hn).
무인기 CNPC 시스템(20)이 통제소(230-1~230-N) 및 무인기(290-1~290-3) 사이에 제공하는 안전운항용 제어용 통신 서비스는 상향링크의 경우 또는 하향링크의 경우에 따라 다를 수 있다. 예를 들어, 상향링크의 경우 안전운항용 제어용 통신 서비스는 Telecommand 정보, ATC Relay 정보, 및 NavAid setting 정보를 중 적어도 하나를 포함하고, 하향링크의 경우 안전운항용 제어용 통신 서비스는 Telemetry 정보, ATC Relay 정보, NavAid 정보, DAA Target 정보, Weather Radar 정보, 안전 이착륙 비디오(Safety take-off landing video) 정보, 및 긴급용 비디오(Emergency video) 정보 중 적어도 하나를 포함할 수 있다. ATC Relay 정보는 ATC 음성 및 데이터 Relay 정보를 포함할 수 있다.The communication service for control for safe operation provided by the drone CNPC system (20) between the control center (230-1 to 230-N) and the drone (290-1 to 290-3) may differ depending on the uplink or the downlink. For example, in the case of the uplink, the communication service for control for safe operation may include at least one of Telecommand information, ATC Relay information, and NavAid setting information, and in the case of the downlink, the communication service for control for safe operation may include at least one of Telemetry information, ATC Relay information, NavAid information, DAA Target information, Weather Radar information, Safety take-off landing video information, and Emergency video information. The ATC Relay information may include ATC voice and data Relay information.
무인기 CNPC 시스템(20)은 채널 용량에 따라 다양한 서비스를 제공할 수 있도록 다양한 형태의 Service Class를 정의하여 제공할 수 있다. 채널 용량은 무인기(290-1~290-3)에 대한 CNPC 채널 용량일 수 있다.The drone CNPC system (20) can define and provide various types of Service Classes so that it can provide various services according to channel capacity. The channel capacity can be the CNPC channel capacity for drones (290-1 to 290-3).
예를 들어, CNPC 무인기기국 시스템(250-1~250-3)은 상향링크의 경우 Service Class를 표 1과 같이 정의하여 할당 받은 채널 대역폭 또는 채널 용량에 따라 다양한 Service Class를 제공할 수 있다. 또한, CNPC 무인기기국 시스템(250-1~250-3)은 하향링크의 경우 Service Class를 표 2와 같이 정의하여 할당 받은 채널 대역폭 또는 채널 용량에 따라 다양한 Service Class를 제공할 수 있다.For example, CNPC unmanned radio station systems (250-1 to 250-3) can provide various Service Classes according to the allocated channel bandwidth or channel capacity by defining Service Classes as in Table 1 for uplink. In addition, CNPC unmanned radio station systems (250-1 to 250-3) can provide various Service Classes according to the allocated channel bandwidth or channel capacity by defining Service Classes as in Table 2 for downlink.
CNPC 무인기기국 시스템(250-1~250-3)이 제공하는 서비스는 무인기(290-1~290-3)를 제어하기 위하여 Telecommand 정보(상향링크, 지상국 -> 무인기국)와 Telemetry 정보(하향링크, 무인기국 -> 지상국)를 반드시 포함할 수 있다. 이외에도 지상무선국과 탑재무선국의 능력 및 할당 받은 채널 용량 또는 대역폭에 따라, TC/TM 데이터, ATC relay 정보, NavAid 정보, DAA target 정보, Weather radar 정보, 및 비디오 정보 중 적어도 하나가 더 포함될 수 있다.The services provided by the CNPC unmanned aerial vehicle system (250-1 to 250-3) may necessarily include Telecommand information (uplink, ground station -> unmanned aerial vehicle) and Telemetry information (downlink, unmanned aerial vehicle -> ground station) to control unmanned aerial vehicles (290-1 to 290-3). In addition, depending on the capabilities of the ground radio station and the payload radio station and the allocated channel capacity or bandwidth, at least one of TC/TM data, ATC relay information, NavAid information, DAA target information, Weather radar information, and video information may be further included.
CNPC 무인기기국 시스템(250-1~250-3)은 이착륙 및 긴급상황 시에 고려될 수 있는 비디오 서비스(안전 이착륙 비디오 정보 및/또는 긴급용 비디오 정보)를 별도의 하향링크 채널의 단일 대역(예를 들어, 무인기 제어용 C 대역)을 통해 제공할 수 있다. 즉, CNPC 무인기기국 시스템(250-1~250-3)은 이착륙 시 또는 En-route 긴급상황 시에 Service Class 1~4 중 1개의 Service Class 및 Service Class 5~6 중 1개의 Service Class를 C 대역의 서로 다른 채널을 통해 동시에 전송할 수 있다.CNPC unmanned aerial vehicle system (250-1 to 250-3) can provide video services (safe takeoff and landing video information and/or emergency video information) that can be considered during takeoff and landing and emergency situations through a single band (e.g., C band for unmanned aerial vehicle control) of a separate downlink channel. That is, CNPC unmanned aerial vehicle system (250-1 to 250-3) can simultaneously transmit one Service Class among
무인기 CNPC 시스템(20)은 링크가용도 99.999%를 만족하기 위해서 이중 대역으로 동작할 수 있다. 예를 들어, CNPC 무인기기국 시스템(250-1~250-3)은 무인기 제어용으로 할당된 C 대역과 L 대역의 이중 대역에서 동작할 수 있다. 무인기 CNPC 시스템(20)은 이중 대역에서 같은 정보 또는 다른 정보를 전송할 수 있다. CNPC 무인기기국 시스템(250-1~250-3)가 같은 정보를 전송할 경우 물리계층에서 L 및 C 대역간 신호 다이버시티 이득(diversity gain)을 얻을 수 있고, 다른 정보를 전송할 경우 C 대역과 L 대역에 대해 SA(210)로부터 다른 대역폭을 할당 받을 수 있다.The drone CNPC system (20) can operate in dual bands to satisfy link availability of 99.999%. For example, the CNPC drone station system (250-1 to 250-3) can operate in dual bands of the C band and the L band allocated for drone control. The drone CNPC system (20) can transmit the same information or different information in the dual bands. When the CNPC drone station system (250-1 to 250-3) transmits the same information, it can obtain signal diversity gain between the L and C bands in the physical layer, and when it transmits different information, it can be allocated different bandwidths from the SA (210) for the C band and the L band.
이때, C 대역은 무인기 전용 주파수 대역으로 61 MHz 전체 주파수 대역으로 무인기 CNPC 용으로 활용될 수 있다. 예를 들어, CNPC 무인기기국 시스템(250-1~250-3)은 C 대역에서 TC/TM 데이터, ATC relay 정보, DAA target 정보, 및 Weather radar 정보 중 적어도 하나를 전송할 수 있다.At this time, the C band is a frequency band dedicated to drones and can be utilized for drone CNPC with the entire 61 MHz frequency band. For example, the CNPC drone station system (250-1 to 250-3) can transmit at least one of TC/TM data, ATC relay information, DAA target information, and Weather radar information in the C band.
L 대역의 경우 타 항공무선장비(aeronautical radio device)와의 간섭이 존재할 수 있다. 예를 들어, CNPC 무인기기국 시스템(250-1~250-3)은 L 대역에서 TC/TM 데이터를 전송할 수 있다. 이하에서는 무인기 CNPC 시스템(20)의 특성에 대하여 설명한다.In the L band, interference with other aeronautical radio devices may exist. For example, the CNPC unmanned aircraft station system (250-1 to 250-3) can transmit TC/TM data in the L band. The characteristics of the unmanned aircraft CNPC system (20) are described below.
무인기 CNPC 시스템(20)은 다음과 같은 링크 구성으로 동작할 수 있다.The unmanned aerial vehicle CNPC system (20) can operate with the following link configuration.
1) 무인기 CNPC 시스템(20)은 다수의 무인기국을 동시에 지원하는 지상국을 다수 개 포함할 수 있다.1) The drone CNPC system (20) may include multiple ground stations that support multiple drone stations simultaneously.
2) 무인기 CNPC 시스템(20)이 네트워크로 연결되어 있는 경우, 무인기 CNPC 시스템(20)은 지상국 간 핸드오버를 통해 커버리지를 확장할 수 있다.2) If the drone CNPC system (20) is connected to a network, the drone CNPC system (20) can expand coverage through handover between ground stations.
3) 무인기 CNPC 시스템(20)은 TDM기반의 지상국을 구현하여 1개의 지상국에서 다수 무인기국 지원을 수행할 수 있다.3) The drone CNPC system (20) implements a TDM-based ground station and can support multiple drone stations from one ground station.
무인기 CNPC 시스템(20)의 상향링크 채널 및 하향링크 채널은 다음과 같은 구성으로 동작할 수 있다.The uplink channel and downlink channel of the unmanned aerial vehicle CNPC system (20) can operate with the following configuration.
1) 무인기 CNPC 시스템(20)은 상향링크(지상국 -> 무인기국)에서 TDM 채널로 동작할 수 있다.1) The drone CNPC system (20) can operate on a TDM channel in the uplink (ground station -> drone station).
2) 무인기 CNPC 시스템(20)은 무인기국 별로 다른 TDM 시간 슬롯을 할당하고, TDM 시간 슬롯에 따라 무인기국을 구분할 수 있다.2) The drone CNPC system (20) can allocate different TDM time slots to each drone station and distinguish drone stations according to the TDM time slot.
3) 무인기 CNPC 시스템(20)은 지상국의 주파수 및 채널 대역폭(TDM 슬롯 수)는 고정하여 할당할 수 있다. 무인기 CNPC 시스템(20)은 long-term 업데이트를 수행하는 경우 TDM 슬롯 수를변경할 수 있다.3) The drone CNPC system (20) can allocate fixed frequencies and channel bandwidths (number of TDM slots) of the ground station. The drone CNPC system (20) can change the number of TDM slots when performing long-term updates.
4) 무인기 CNPC 시스템(20)은 해당 지상국과 통신하는 무인기국에 할당되는 슬롯 수 및 위치를 유연하게 변경하여 다수 무인기국을 동시에 지원하고, 셀 내 채널 변경을 효율적으로 지원할 수 있다.4) The drone CNPC system (20) can support multiple drone stations simultaneously by flexibly changing the number and location of slots allocated to drone stations communicating with the corresponding ground station, and can efficiently support channel changes within a cell.
5) 무인기 CNPC 시스템(20)은 하향링크(무인기국 -> 지상국)에서 FDMA 채널로 동작할 수 있다.5) The drone CNPC system (20) can operate on an FDMA channel in the downlink (drone station -> ground station).
6) 무인기 CNPC 시스템(20)은 이중 대역 채널(예를 들어, L 대역 및 C 대역)에서 동시 송수신을 지원할 수 있다.6) The drone CNPC system (20) can support simultaneous transmission and reception in dual-band channels (e.g., L band and C band).
7) 무인기 CNPC 시스템(20)은 다수의 채널 대역폭(예를 들어, 90/180/270/360/450/540 /630/720 kHz를 가지는 8개의 채널 대역폭)을 지원할 수 있다.7) The drone CNPC system (20) can support multiple channel bandwidths (e.g., eight channel bandwidths having 90/180/270/360/450/540 /630/720 kHz).
8) 무인기 CNPC 시스템(20)은 상향링크 채널 대역폭에 따라 다른 TDM 시간 슬롯 수를 지원할 수 있다. 예를 들어, 무인기 CNPC 시스템(20)은 90kHz의 경우 3개 슬롯을, 180kHz의 경우 6개 슬롯을, 720kHz의 경우 24개 시간 슬롯을 지원할 수 있다.8) The drone CNPC system (20) can support different numbers of TDM time slots depending on the uplink channel bandwidth. For example, the drone CNPC system (20) can support 3 slots for 90 kHz, 6 slots for 180 kHz, and 24 time slots for 720 kHz.
9) 무인기 CNPC 시스템(20)은 링크 방향 및 대역 별 다른 채널 대역폭 수를 지원할 수 있다. 예를 들어, 무인기 CNPC 시스템(20)은 상향링크의 경우 90/180/270/360/450/540/630/720 kHz를 지원하고, 하향링크의 경우 30/40/90/120 kHz를 지원할 수 있다.9) The drone CNPC system (20) can support different channel bandwidths for each link direction and band. For example, the drone CNPC system (20) can support 90/180/270/360/450/540/630/720 kHz for uplink and 30/40/90/120 kHz for downlink.
10) 무인기 CNPC 시스템(20)의 무인기국은 2개 FDMA 채널의 동시 송신을 지원할 수 있다. 예를 들어, 2개 FDMA 채널은 무인기 제어용으로 DC1~DC4 중 1개의 채널과 안전 비디오 용으로 DC5~DC6 중 1개의 채널일 수 있다.10) The drone station of the drone CNPC system (20) can support simultaneous transmission of two FDMA channels. For example, the two FDMA channels can be one channel among DC1 to DC4 for drone control and one channel among DC5 to DC6 for safety video.
11) 무인기 CNPC 시스템(20)은 채널 재할당 및 핸드오버 이외에는 고정 채널에서 동작할 수 있다.11) The drone CNPC system (20) can operate on a fixed channel except for channel reallocation and handover.
이하에서는 무인기 CNPC 시스템(10 또는 20)의 초기 접속 방법을 설명한다.Below, the initial connection method of the drone CNPC system (10 or 20) is described.
도 3은 일 실시예에 따른 무인기 CNPC 시스템의 블록도의 일 예를 나타내고, 도 4는 도 3에 도시된 지상국이 할당 주파수 정보를 전송하는 동작의 일 예를 설명하기 위한 도면이고, 도 5는 할당 주파수 정보의 일 예를 나타낸다.FIG. 3 illustrates an example of a block diagram of an unmanned aerial vehicle CNPC system according to one embodiment, FIG. 4 is a diagram for explaining an example of an operation in which a ground station illustrated in FIG. 3 transmits allocated frequency information, and FIG. 5 illustrates an example of allocated frequency information.
도 3 내지 도 5를 참조하면, 무인기 CNPC 시스템(30)은 SA(310), 통제소(330), 지상국(340), 및 무인기국(350)을 포함한다.Referring to FIGS. 3 to 5, the drone CNPC system (30) includes an SA (310), a control center (330), a ground station (340), and a drone station (350).
통제소(330)는 SA(310)로부터 주파수를 할당 받아 지상국(340) 및 무인기국(350)에 설정할 수 있다. 통제소(330) 및 지상국(340)은 직접 또는 유무선 네트워크를 통해 연결되어 있고, 통제소(330)는 지상국(340)의 주파수를 직접 설정할 수 있다. 통제소(330)는 무인기국(350)이 지원하는 방식(예를 들어, 터치패드 입력, 블루투스 연결을 통한 무선설정 등)으로 무인기국(350)의 주파수를 설정할 수 있다. 또한 통제소(330)는, 미리 정해진 방법에 따라, 지상국(340)을 통해 수신된 정보를 사용하여 무인기국(350)의 주파수를 설정할 수 있다.The control station (330) can receive a frequency from the SA (310) and set it for the ground station (340) and the drone station (350). The control station (330) and the ground station (340) are connected directly or through a wired or wireless network, and the control station (330) can directly set the frequency of the ground station (340). The control station (330) can set the frequency of the drone station (350) in a manner supported by the drone station (350) (e.g., touchpad input, wireless setting through Bluetooth connection, etc.). In addition, the control station (330) can set the frequency of the drone station (350) using information received through the ground station (340) according to a predetermined method.
지상국(340)은 SA(310)로부터 할당 받은 정보에 기초하여 송수신기(transceiver)의 주파수 및 데이터 클래스(DC)를 확인하고 설정할 수 있다. 이때, 상향링크(uplink)의 DC가 DC1이 아닌 경우, 지상국(340)은 상향링크의 DC를 DC1으로 설정하고 DC1으로 할당 주파수 정보 메시지(500)를 전송할 수 있다. 지상국(340)은 매 전송 타이밍마다 상향링크 주파수에서 DC1으로 할당 주파수 정보 메시지(500)를 전송할 수 있다. 지상국(340)은 DC1을 사용하여 무인기국(350)으로 할당 주파수 정보 메시지(500)를 전송할 수 있다. 이에, 지상국(340)은 무인기국(350)에 제어용 주파수를 설정할 수 있다. 무인기 CNPC 시스템(30)이 P2MP형인 경우, 지상국(340)은 상향링크 주파수에서 할당된 슬롯으로 주파수 정보를 전송할 수 있다.The ground station (340) can check and set the frequency and data class (DC) of the transceiver based on the information allocated from the SA (310). At this time, if the DC of the uplink is not DC1, the ground station (340) can set the DC of the uplink to DC1 and transmit the allocation frequency information message (500) to DC1. The ground station (340) can transmit the allocation frequency information message (500) from the uplink frequency to DC1 at each transmission timing. The ground station (340) can transmit the allocation frequency information message (500) to the drone (350) using DC1. Accordingly, the ground station (340) can set the control frequency to the drone (350). If the drone CNPC system (30) is of the P2MP type, the ground station (340) can transmit frequency information from the uplink frequency to the allocated slot.
지상국(340)은 매 수신 타이밍마다 무인기국(350)으로부터 메시지 수신을 시도할 수 있다. 예를 들어, 지상국(340)은 할당된 주파수에서 할당된 DC로 무인기국(350)의 메시지를 수신할 수 있다. 지상국(340)이 무인기국(350)의 메시지를 수신한 경우, 할당 주파수 정보 메시지(500)의 전송 절차를 종료할 수 있다. 또한, 지상국(340)이 무인기국(350)의 메시지를 수신하지 않은 경우, 지상국(340)이 메시지를 수신할 때까지 할당 주파수 정보 메시지(500)를 전송하고, 무인기국(350)의 메시지 수신 시도를 반복할 수 있다.The ground station (340) may attempt to receive a message from the drone (350) at each reception timing. For example, the ground station (340) may receive a message from the drone (350) at an assigned frequency with an assigned DC. If the ground station (340) receives a message from the drone (350), the transmission procedure of the allocated frequency information message (500) may be terminated. In addition, if the ground station (340) has not received a message from the drone (350), the allocated frequency information message (500) may be transmitted until the ground station (340) receives the message, and the attempt to receive the message from the drone (350) may be repeated.
할당 주파수 정보 메시지(500)는 헤더(510), 무인기 ID(530), 할당 주파수 정보(550), 및 패딩(padding; 570)을 포함할 수 있다. 헤더(510)는 할당 주파수 정보 메시지(500)의 길이와 같은 기초적인 정보를 포함할 수 있다. 무인기 ID(530)는 할당 주파수 정보의 대상이 되는 무인기의 ID일 수 있다. 지상국(340)은 무인기 ID(530)를 물리계층에서 추가되는 CRC(Cyclic Redundancy Check)에 스크램블링(scrambling)을 수행하여 무인기국(350)에 전송할 수 있다. 할당 주파수 정보(550)는 지상국(340) 및 무인기국(350)에 제어용 통신을 위해 할당된 주파수의 정보일 수 있다. 패딩(570)은 할당 주파수 정보 메시지(500)의 크기를 조절하는 정보일 수 있다. 예를 들어, 지상국(340)은 DC1으로 할당 주파수 정보 메시지(500)를 전송할 때, 할당 주파수 정보 메시지(500)의 크기를 DC1에 대응하도록 설정할 수 있다. 이때, 지상국(340)은 패딩(570)의 크기를 제어하여 할당 주파수 정보 메시지(500)의 크기를 제어할 수 있다.The allocation frequency information message (500) may include a header (510), a drone ID (530), allocation frequency information (550), and padding (570). The header (510) may include basic information such as the length of the allocation frequency information message (500). The drone ID (530) may be an ID of a drone that is a target of the allocation frequency information. The ground station (340) may perform scrambling on the drone ID (530) with a CRC (Cyclic Redundancy Check) added in the physical layer and transmit it to the drone station (350). The allocation frequency information (550) may be information on a frequency allocated for control communication between the ground station (340) and the drone station (350). The padding (570) may be information for adjusting the size of the allocation frequency information message (500). For example, when the ground station (340) transmits an allocation frequency information message (500) to DC1, the size of the allocation frequency information message (500) can be set to correspond to DC1. At this time, the ground station (340) can control the size of the allocation frequency information message (500) by controlling the size of the padding (570).
도 6은 무인기 제어용 주파수에서의 할당 가능한 중심주파수를 설명하기 위한 도면이고, 도 7은 무인기 제어용 중심주파수에서 할당 가능한 대역폭 크기를 설명하기 위한 도면이다.Figure 6 is a drawing for explaining an allocatable center frequency in a frequency for drone control, and Figure 7 is a drawing for explaining an allocatable bandwidth size in a center frequency for drone control.
도 3, 도 5 내지 7을 참조하면, 지상국(340)이 할당 주파수 정보 메시지(500)를 전송하면, 무인기국(350)은 할당 주파수 정보 메시지(500)를 수신해야 한다. 즉, 무인기국(350)은 지상국(340)이 할당 주파수 정보 메시지(500)를 전송하는 주파수를 확인해야 한다.Referring to FIG. 3 and FIG. 5 to 7, when the ground station (340) transmits an allocation frequency information message (500), the drone station (350) must receive the allocation frequency information message (500). That is, the drone station (350) must confirm the frequency on which the ground station (340) transmits the allocation frequency information message (500).
무인기국(350)은 무인기 제어용 주파수로 할당된 대역에서 할당 가능한 중심주파수를 모두 확인할 수 있다. 무인기 제어용 주파수 중에서 지상국(340)용 주파수 영역이 따로 설정되어 있는 경우, 또는 용도에 따라 주파수 대역이 구분되어 있는 경우, 무인기국(350)은 지상국(340)이 사용할 수 있는 주파수 대역에서만 중심주파수를 확인할 수 있다.The drone station (350) can check all center frequencies that can be assigned in the band allocated as the drone control frequency. If a frequency range for the ground station (340) is set separately among the drone control frequencies, or if the frequency band is divided according to the purpose, the drone station (350) can check the center frequency only in the frequency band that the ground station (340) can use.
또한, 무인기국(350)은 하나의 중심주파수에 대한 모든 대역폭을 확인할 수 있다. 하나의 중심주파수에서 다양한 크기의 대역폭이 할당될 수 있기 때문이다. 무인기국(350)은 할당 가능한 중심주파수에서 가장 작은 대역폭의 크기로 신호 에너지(Radio Signal Strength)를 측정할 수 있다.In addition, the drone (350) can check all bandwidths for one center frequency. This is because bandwidths of various sizes can be allocated from one center frequency. The drone (350) can measure signal energy (radio signal strength) with the size of the smallest bandwidth in the allocable center frequency.
이때, 무인기국(350)은 측정된 신호 에너지가 임계 값 이상인 적어도 하나의 중심주파수를 찾아 높은 신호 에너지 값을 가지는 순서로 정렬할 수 있다. 무인기국(350)은 높은 신호 에너지 값을 가지는 중심주파수 순서대로 DC1 신호 수신을 시도할 수 있다. 예를 들어, 무인기국(350)은 가장 높은 신호 에너지 값을 가지는 중심주파수의 적용 가능한 모든 대역폭에 대해서 DC1 신호 수신을 시도할 수 있다.At this time, the drone (350) can find at least one center frequency whose measured signal energy is greater than a threshold value and sort them in order of high signal energy value. The drone (350) can attempt to receive the DC1 signal in order of center frequency having high signal energy value. For example, the drone (350) can attempt to receive the DC1 signal for all applicable bandwidths of the center frequency having the highest signal energy value.
무인기국(350)이 무인기 ID(530)가 일치하는 메시지를 수신한 경우, 무인기국(350)은 탐색(확인) 절차를 종료할 수 있다. 무인기국(350)이 무인기 ID(530)가 일치하는 메시지를 수신하지 못한 경우, 다음으로 높은 신호 에너지 값을 갖는 중심주파수에서 DC1 신호 수신을 시도할 수 있다. 상술한 과정을 통해, 무인기국(350)은 중심주파수 탐색(확인) 시간을 단축할 수 있다.If the drone station (350) receives a message matching the drone ID (530), the drone station (350) can terminate the search (verification) procedure. If the drone station (350) does not receive a message matching the drone ID (530), it can attempt to receive a DC1 signal at a center frequency having the next highest signal energy value. Through the above-described process, the drone station (350) can shorten the center frequency search (verification) time.
무인기 CNPC 시스템(30)이 P2MP형인 경우, 무인기국(350)은 대역폭 크기에 따라 존재하는 모든 슬롯에 대해서 신호 수신을 시도할 수 있다. 대역폭의 크기에 따라 슬롯의 개수가 다르기 때문이다.When the drone CNPC system (30) is of the P2MP type, the drone station (350) can attempt to receive signals for all slots existing according to the bandwidth size. This is because the number of slots varies depending on the bandwidth size.
도 8은 도 3에 도시된 무인기국이 할당 주파수 정보를 획득하는 동작의 일 예를 설명한다.Figure 8 illustrates an example of the operation of the unmanned aerial vehicle illustrated in Figure 3 to obtain allocated frequency information.
도 3 및 도 8을 참조하면, 무인기국(350)은 지상국(340)이 송신하는 할당 주파수 정보(550)를 획득할 수 있다. 무인기국(350)은 전체 할당 가능 중심주파수 중에서 할당 가능한 가장 작은 대역폭으로 신호 에너지를 측정할 수 있다. 무인기국(350)은 측정된 신호 에너지가 임계 값 이상인 적어도 하나의 중심주파수를 찾아 높은 신호 에너지 값을 가지는 순서로 정렬할 수 있다. 무인기국(350)은 높은 신호 에너지 값을 가지는 중심주파수 순서대로 DC1 신호 수신을 시도할 수 있다. 상술한 바와 마찬가지로, 무인기국(350)은 중심주파수 별로 할당 가능한 모든 대역폭에 대해서 DC1 수신을 시도할 수 있다.Referring to FIG. 3 and FIG. 8, the drone (350) can obtain the allocated frequency information (550) transmitted by the ground station (340). The drone (350) can measure signal energy with the smallest allocatable bandwidth among allocatable center frequencies. The drone (350) can find at least one center frequency whose measured signal energy is greater than or equal to a threshold value and sort them in order of high signal energy values. The drone (350) can attempt to receive DC1 signals in the order of center frequencies with high signal energy values. As described above, the drone (350) can attempt to receive DC1 for all allocatable bandwidths for each center frequency.
무인기 CNPC 시스템(30)이 P2MP형인 경우, 무인기국(350)은 대역폭 크기에 따라 존재하는 모든 슬롯에 대해서 DC1 수신을 시도할 수 있다. 무인기국(350)이 DC1 수신에 성공하고, 수신한 할당 주파수 정보 메시지(500)의 무인기 ID(530)와 무인기국(350)에 할당된 무인기 ID가 일치하는 경우, 무인기국(350)은 할당 주파수 정보 메시지(500)를 상위계층으로 전달할 수 있다. 이에, SA(310)의 할당 주파수 정보(550)를 반영할 수 있다. 무인기국(350)은 할당 주파수 정보 획득 절차를 종료할 수 있다.If the drone CNPC system (30) is of the P2MP type, the drone station (350) can attempt to receive DC1 for all slots existing according to the bandwidth size. If the drone station (350) succeeds in receiving DC1 and the drone ID (530) of the received allocation frequency information message (500) matches the drone ID assigned to the drone station (350), the drone station (350) can transmit the allocation frequency information message (500) to the upper layer. Accordingly, the allocation frequency information (550) of the SA (310) can be reflected. The drone station (350) can end the allocation frequency information acquisition procedure.
지상국(340)은 초기에 CNPC 네트워크가 설치될 때, 사용할 주파수를 할당받을 수 있다. 통제소(330)가 무인기를 활용하는 경우, 통제소(330)는 무인기가 하향링크에 사용할 주파수 및 지상국(340)이 상향링크에 사용할 주파수를 SA(310)로부터 할당받을 수 있다. 또한, CNPC 네트워크가 설치되어 활용되는 경우, 통제소(330) 지상국(340)에 정보를 직접 설정하지 않고, SA(310)가 CNPC 네트워크로 해당 정보를 직접 알려줄 수 있다. 무인기국(350)은, CNPC 네트워크가 없을 때와 마찬가지로, 무인기국(350)이 지원하는 방식 및 지상국(340)을 통해 수신한 정보를 이용하는 방식을 사용할 수 있다. 즉, CNPC 네트워크와 통제소(330)는 실질적으로 유사한 동작을 수행할 수 있다.The ground station (340) can be allocated a frequency to be used when the CNPC network is initially installed. When the control station (330) utilizes a drone, the control station (330) can be allocated a frequency to be used by the drone for downlink and a frequency to be used by the ground station (340) for uplink from the SA (310). In addition, when the CNPC network is installed and utilized, the SA (310) can directly inform the CNPC network of the corresponding information without directly setting the information in the control station (330) and the ground station (340). The drone station (350) can use a method supported by the drone station (350) and a method using information received through the ground station (340), just as when there is no CNPC network. In other words, the CNPC network and the control station (330) can perform substantially similar operations.
CNPC 네트워크는 통제소(330) 및 지상국(340) 사이에 형성되는 통신 네트워크일 수 있다. 예를 들어, CNPC 네트워크는 통제소(330) 및 지상국(340)의 아이덴터티(identity)를 사용하여 초기 접속 동작을 수행할 수 있다.The CNPC network may be a communication network formed between a control center (330) and a ground station (340). For example, the CNPC network may perform an initial access operation using the identities of the control center (330) and the ground station (340).
상술한 구성들은 SA(310)를 통해 할당 받은 주파수를 사용하여 지상국(340) 및 무인기국(350)의 초기접속을 수행할 수 있다. 또한, 무인기가 할당된 정보를 모르는 상태이더라도, 할당 받은 주파수를 찾아서 접속을 수행할 수 있다. 상술한 무인기 CNPC 시스템은 유연하게 확장 가능하고, P2P형 또는 P2MP형에 사용될 수 있다. 무인기 CNPC 시스템이 P2MP형에 사용되는 경우, 다수 무인기를 동시에 지원할 수 있다.The above-described configurations can perform initial connection of a ground station (340) and a drone station (350) using the frequency allocated through SA (310). In addition, even if the drone does not know the allocated information, it can find the allocated frequency and perform connection. The above-described drone CNPC system is flexibly expandable and can be used for P2P or P2MP types. When the drone CNPC system is used for P2MP type, it can support multiple drones simultaneously.
이상에서 설명된 장치는 하드웨어 구성요소, 소프트웨어 구성요소, 및/또는 하드웨어 구성요소 및 소프트웨어 구성요소의 조합으로 구현될 수 있다. 예를 들어, 실시예들에서 설명된 장치 및 구성요소는, 예를 들어, 프로세서, 콘트롤러, ALU(arithmetic logic unit), 디지털 신호 프로세서(digital signal processor), 마이크로컴퓨터, FPGA(field programmable gate array), PLU(programmable logic unit), 마이크로프로세서, 또는 명령(instruction)을 실행하고 응답할 수 있는 다른 어떠한 장치와 같이, 하나 이상의 범용 컴퓨터 또는 특수 목적 컴퓨터를 이용하여 구현될 수 있다. 처리 장치는 운영 체제(OS) 및 상기 운영 체제 상에서 수행되는 하나 이상의 소프트웨어 애플리케이션을 수행할 수 있다. 또한, 처리 장치는 소프트웨어의 실행에 응답하여, 데이터를 접근, 저장, 조작, 처리 및 생성할 수도 있다. 이해의 편의를 위하여, 처리 장치는 하나가 사용되는 것으로 설명된 경우도 있지만, 해당 기술분야에서 통상의 지식을 가진 자는, 처리 장치가 복수 개의 처리 요소(processing element) 및/또는 복수 유형의 처리 요소를 포함할 수 있음을 알 수 있다. 예를 들어, 처리 장치는 복수 개의 프로세서 또는 하나의 프로세서 및 하나의 콘트롤러를 포함할 수 있다. 또한, 병렬 프로세서(parallel processor)와 같은, 다른 처리 구성(processing configuration)도 가능하다.The devices described above may be implemented as hardware components, software components, and/or a combination of hardware components and software components. For example, the devices and components described in the embodiments may be implemented using one or more general-purpose computers or special-purpose computers, such as, for example, a processor, a controller, an arithmetic logic unit (ALU), a digital signal processor, a microcomputer, a field programmable gate array (FPGA), a programmable logic unit (PLU), a microprocessor, or any other device capable of executing instructions and responding to them. The processing device may execute an operating system (OS) and one or more software applications running on the operating system. In addition, the processing device may access, store, manipulate, process, and generate data in response to the execution of the software. For ease of understanding, the processing device is sometimes described as being used alone, but those skilled in the art will appreciate that the processing device may include multiple processing elements and/or multiple types of processing elements. For example, the processing device may include multiple processors, or a processor and a controller. Other processing configurations, such as parallel processors, are also possible.
소프트웨어는 컴퓨터 프로그램(computer program), 코드(code), 명령(instruction), 또는 이들 중 하나 이상의 조합을 포함할 수 있으며, 원하는 대로 동작하도록 처리 장치를 구성하거나 독립적으로 또는 결합적으로(collectively) 처리 장치를 명령할 수 있다. 소프트웨어 및/또는 데이터는, 처리 장치에 의하여 해석되거나 처리 장치에 명령 또는 데이터를 제공하기 위하여, 어떤 유형의 기계, 구성요소(component), 물리적 장치, 가상 장치(virtual equipment), 컴퓨터 저장 매체 또는 장치, 또는 전송되는 신호 파(signal wave)에 영구적으로, 또는 일시적으로 구체화(embody)될 수 있다. 소프트웨어는 네트워크로 연결된 컴퓨터 시스템 상에 분산되어서, 분산된 방법으로 저장되거나 실행될 수도 있다. 소프트웨어 및 데이터는 하나 이상의 컴퓨터 판독 가능 기록 매체에 저장될 수 있다.The software may include a computer program, code, instructions, or a combination of one or more of these, which may configure a processing device to perform a desired operation or may independently or collectively command the processing device. The software and/or data may be permanently or temporarily embodied in any type of machine, component, physical device, virtual equipment, computer storage medium or device, or transmitted signal waves, for interpretation by the processing device or for providing instructions or data to the processing device. The software may also be distributed over network-connected computer systems, and stored or executed in a distributed manner. The software and data may be stored on one or more computer-readable recording media.
실시예에 따른 방법은 다양한 컴퓨터 수단을 통하여 수행될 수 있는 프로그램 명령 형태로 구현되어 컴퓨터 판독 가능 매체에 기록될 수 있다. 상기 컴퓨터 판독 가능 매체는 프로그램 명령, 데이터 파일, 데이터 구조 등을 단독으로 또는 조합하여 포함할 수 있다. 상기 매체에 기록되는 프로그램 명령은 실시예를 위하여 특별히 설계되고 구성된 것들이거나 컴퓨터 소프트웨어 당업자에게 공지되어 사용 가능한 것일 수도 있다. 컴퓨터 판독 가능 기록 매체의 예에는 하드 디스크, 플로피 디스크 및 자기 테이프와 같은 자기 매체(magnetic media), CD-ROM, DVD와 같은 광기록 매체(optical media), 플롭티컬 디스크(floptical disk)와 같은 자기-광 매체(magneto-optical media), 및 롬(ROM), 램(RAM), 플래시 메모리 등과 같은 프로그램 명령을 저장하고 수행하도록 특별히 구성된 하드웨어 장치가 포함된다. 프로그램 명령의 예에는 컴파일러에 의해 만들어지는 것과 같은 기계어 코드뿐만 아니라 인터프리터 등을 사용해서 컴퓨터에 의해서 실행될 수 있는 고급 언어 코드를 포함한다. 상기된 하드웨어 장치는 실시예의 동작을 수행하기 위해 하나 이상의 소프트웨어 모듈로서 작동하도록 구성될 수 있으며, 그 역도 마찬가지이다.The method according to the embodiment may be implemented in the form of program commands that can be executed through various computer means and recorded on a computer-readable medium. The computer-readable medium may include program commands, data files, data structures, etc., alone or in combination. The program commands recorded on the medium may be those specially designed and configured for the embodiment or may be those known to and available to those skilled in the art of computer software. Examples of the computer-readable recording medium include magnetic media such as hard disks, floppy disks, and magnetic tapes, optical media such as CD-ROMs and DVDs, magneto-optical media such as floptical disks, and hardware devices specially configured to store and execute program commands such as ROMs, RAMs, flash memories, etc. Examples of the program commands include not only machine language codes generated by a compiler but also high-level language codes that can be executed by a computer using an interpreter, etc. The hardware devices described above may be configured to operate as one or more software modules to perform the operations of the embodiment, and vice versa.
이상과 같이 실시예들이 비록 한정된 실시예와 도면에 의해 설명되었으나, 해당 기술분야에서 통상의 지식을 가진 자라면 상기의 기재로부터 다양한 수정 및 변형이 가능하다. 예를 들어, 설명된 기술들이 설명된 방법과 다른 순서로 수행되거나, 및/또는 설명된 시스템, 구조, 장치, 회로 등의 구성요소들이 설명된 방법과 다른 형태로 결합 또는 조합되거나, 다른 구성요소 또는 균등물에 의하여 대치되거나 치환되더라도 적절한 결과가 달성될 수 있다.Although the embodiments have been described above by way of limited examples and drawings, those skilled in the art can make various modifications and variations from the above description. For example, appropriate results can be achieved even if the described techniques are performed in a different order than the described method, and/or components of the described system, structure, device, circuit, etc. are combined or combined in a different form than the described method, or are replaced or substituted by other components or equivalents.
그러므로, 다른 구현들, 다른 실시예들 및 특허청구범위와 균등한 것들도 후술하는 특허청구범위의 범위에 속한다.Therefore, other implementations, other embodiments, and equivalents to the claims are also included in the scope of the claims described below.
Claims (18)
Translated fromKorean상기 지상국 및 상기 무인기국이 상기 상향링크 주파수 또는 상기 하향링크 주파수를 사용하여 초기 접속을 수행하는 단계
를 포함하고,
상기 설정하는 단계는,
상기 무인기국이 할당 가능한 모든 중심 주파수에 대하여 신호 에너지를 측정하는 단계;
상기 신호 에너지가 임계 값 이상인 적어도 하나의 중심 주파수를 선택하는 단계; 및
상기 무인기국이 상기 적어도 하나의 중심 주파수에 기초하여 상기 상향링크 주파수 및 상기 하향링크 주파수를 설정하는 단계
를 포함하는 무인기 CNPC 접속 방법
A step of setting uplink frequency and downlink frequency to ground station and drone station; and
A step in which the above ground station and the above drone station perform initial connection using the above uplink frequency or the above downlink frequency.
Including,
The steps to set up above are:
A step of measuring signal energy for all center frequencies assignable to the above drone;
a step of selecting at least one center frequency having a signal energy greater than a threshold value; and
The step of the drone setting the uplink frequency and the downlink frequency based on the at least one center frequency
Method of accessing CNPC drone including
상기 설정하는 단계는,
통제소가 상기 상향링크 주파수 및 상기 하향링크 주파수를 주파수 관할청으로부터 획득하는 단계; 및
상기 통제소가 상기 상향링크 주파수 및 상기 하향링크 주파수를 상기 지상국과 상기 무인기국에 설정하는 단계
를 포함하는 무인기 CNPC 접속 방법.
In the first paragraph,
The steps to set up above are:
The step of the control center obtaining the uplink frequency and the downlink frequency from the frequency management authority; and
The step of the above control station setting the above uplink frequency and the above downlink frequency to the above ground station and the above unmanned aerial vehicle station.
A method of accessing a drone CNPC including:
상기 설정하는 단계는,
통제소가 상기 상향링크 주파수 및 상기 하향링크 주파수를 상기 지상국과 상기 무인기국에 전송하는 단계; 및
상기 지상국과 상기 무인기국이 상기 상향링크 주파수 및 상기 하향링크 주파수를 설정하는 단계
를 포함하는 무인기 CNPC 접속 방법.
In the first paragraph,
The steps to set up above are:
A step in which the control station transmits the uplink frequency and the downlink frequency to the ground station and the drone station; and
The step of the above ground station and the above drone station setting the above uplink frequency and the above downlink frequency
A method of accessing a drone CNPC including:
상기 전송하는 단계는,
상기 통제소가 할당 주파수 전송 메시지를 상기 지상국과 상기 무인기국에 전송하는 단계
를 포함하고,
상기 할당 주파수 전송 메시지는,
상기 상향링크 주파수, 상향링크 데이터 클래스(DC), 상기 하향링크 주파수, 하향링크 데이터 클래스(DC), 무인기 ID
를 포함하는 무인기 CNPC 접속 방법.
In the third paragraph,
The above transmitting step is,
The step of the above control station transmitting the assigned frequency transmission message to the above ground station and the above drone station
Including,
The above allocation frequency transmission message is,
The above uplink frequency, uplink data class (DC), the above downlink frequency, downlink data class (DC), and drone ID
A method of accessing a drone CNPC including:
상기 무인기 ID는 CRC(Cyclic Redundancy Check)에 스크램블링(scrambling)을 수행하여 획득되는
무인기 CNPC 접속 방법.
In paragraph 4,
The above drone ID is obtained by performing scrambling on the CRC (Cyclic Redundancy Check).
How to connect to CNPC drone.
상기 측정하는 단계는,
상기 무인기국이 상기 할당 가능한 모든 중심 주파수에 대하여 할당 가능한 가장 작은 대역폭의 크기로 상기 신호 에너지를 측정하는 단계
를 포함하는 무인기 CNPC 접속 방법.
In the first paragraph,
The above measuring steps are:
The step of the above drone measuring the signal energy in the size of the smallest bandwidth that can be allocated for all the center frequencies that can be allocated.
A method of accessing a drone CNPC including:
상기 무인기국이 상기 적어도 하나의 중심 주파수에 기초하여 상기 상향링크 주파수 및 상기 하향링크 주파수를 설정하는 단계는,
상기 적어도 하나의 중심 주파수를 신호 에너지가 높은 순서로 정렬하는 단계;
상기 무인기국이 상기 적어도 하나의 중심 주파수에 대해서 수신한 할당 주파수 정보 메시지의 무인기 ID를 검증(verify)하는 단계; 및
상기 무인기 ID가 실제 무인기의 ID와 일치하는 경우, 상기 무인기국이 상기 주파수 정보 메시지에 기초하여 상기 상향링크 주파수 및 상기 하향링크 주파수를 설정하는 단계
를 포함하는 무인기 CNPC 접속 방법.
In the first paragraph,
The step of the drone setting the uplink frequency and the downlink frequency based on the at least one center frequency is:
A step of arranging at least one center frequency in order of increasing signal energy;
A step of verifying the drone ID of the allocated frequency information message received by the drone for at least one center frequency; and
If the above drone ID matches the ID of the actual drone, the step of the drone station setting the uplink frequency and the downlink frequency based on the frequency information message
A method of accessing a drone CNPC including:
상기 설정하는 단계는,
주파수 관할청이 상기 무인기국에 할당된 상기 상향링크 주파수 및 상기 하향링크 주파수를 CNPC 네트워크에 통지하는 단계; 및
상기 CNPC 네트워크가 상기 지상국에 상기 상향링크 주파수 및 상기 하향링크 주파수를 설정하는 단계
를 포함하는 무인기 CNPC 접속 방법.
In the first paragraph,
The steps to set up above are:
The step of the frequency authority notifying the CNPC network of the uplink frequency and the downlink frequency allocated to the drone station; and
The step of the above CNPC network setting the uplink frequency and the downlink frequency to the above ground station
A method of accessing a drone CNPC including:
상기 지상국 및 상기 무인기국이 상기 상향링크의 슬롯 또는 상기 하향링크 주파수를 사용하여 초기 접속을 수행하는 단계
를 포함하고,
상기 설정하는 단계는,
상기 무인기국이 할당 가능한 모든 중심 주파수에 대하여 신호 에너지를 측정하는 단계;
상기 신호 에너지가 임계 값 이상인 적어도 하나의 중심 주파수를 선택하는 단계; 및
상기 무인기국이 상기 적어도 하나의 중심 주파수에 기초하여 상기 상향링크의 슬롯 및 상기 하향링크 주파수를 설정하는 단계
를 포함하는 무인기 CNPC 접속 방법.
A step of setting the uplink slot and downlink frequency to the ground station and the drone station; and
A step in which the above ground station and the above drone station perform initial connection using the slot of the above uplink or the above downlink frequency.
Including,
The steps to set up above are:
A step of measuring signal energy for all center frequencies assignable to the above drone;
a step of selecting at least one center frequency having a signal energy greater than a threshold value; and
The step of the drone setting the slot of the uplink and the downlink frequency based on the at least one center frequency
A method of accessing a drone CNPC including:
상기 설정하는 단계는,
통제소가 상기 상향링크의 슬롯 및 상기 하향링크 주파수를 주파수 관할청으로부터 획득하는 단계; 및
상기 통제소가 상기 상향링크의 슬롯 및 상기 하향링크 주파수를 상기 지상국과 상기 무인기국에 설정하는 단계
를 포함하는 무인기 CNPC 접속 방법.
In Article 10,
The steps to set up above are:
A step in which the control center acquires the slot of the uplink and the downlink frequency from the frequency management authority; and
The step of the above control station setting the slot of the above uplink and the above downlink frequency to the above ground station and the above unmanned aerial vehicle station.
A method of accessing a drone CNPC including:
상기 설정하는 단계는,
통제소가 상기 상향링크의 슬롯 및 상기 하향링크 주파수를 상기 지상국과 상기 무인기국에 전송하는 단계; 및
상기 지상국과 상기 무인기국이 상기 상향링크의 슬롯 및 상기 하향링크 주파수를 설정하는 단계
를 포함하는 무인기 CNPC 접속 방법.
In Article 10,
The steps to set up above are:
A step in which the control station transmits the slot of the uplink and the downlink frequency to the ground station and the drone station; and
The step of the above ground station and the above drone station setting the slot of the above uplink and the above downlink frequency
A method of accessing a drone CNPC including:
상기 전송하는 단계는,
상기 통제소가 할당 주파수 전송 메시지를 상기 지상국과 상기 무인기국에 전송하는 단계
를 포함하고,
상기 할당 주파수 전송 메시지는,
상향링크 주파수, 상향링크 대역폭, 상향링크 데이터 클래스(DC), 상기 상향링크의 슬롯의 위치, 상기 하향링크 주파수, 하향링크 데이터 클래스(DC), 무인기 ID
를 포함하는 무인기 CNPC 접속 방법.
In Article 12,
The above transmitting step is,
The step of the above control station transmitting the assigned frequency transmission message to the above ground station and the above drone station
Including,
The above allocation frequency transmission message is,
Uplink frequency, uplink bandwidth, uplink data class (DC), position of the slot of the uplink, downlink frequency, downlink data class (DC), drone ID
A method of accessing a drone CNPC including:
상기 무인기 ID는 CRC에 스크램블링을 수행하여 획득되는
무인기 CNPC 접속 방법.
In Article 13,
The above drone ID is obtained by performing scrambling on the CRC.
How to connect to CNPC drone.
상기 측정하는 단계는,
상기 무인기국이 상기 할당 가능한 모든 중심 주파수에 대하여 할당 가능한 가장 작은 대역폭의 크기로 상기 신호 에너지를 측정하는 단계
를 포함하는 무인기 CNPC 접속 방법.
In Article 10,
The above measuring steps are:
The step of the above drone measuring the signal energy in the size of the smallest bandwidth that can be allocated for all the center frequencies that can be allocated.
A method of accessing a drone CNPC including:
상기 무인기국이 상기 적어도 하나의 중심 주파수에 기초하여 상기 상향링크의 슬롯 및 상기 하향링크 주파수를 설정하는 단계는,
상기 적어도 하나의 중심 주파수를 신호 에너지가 높은 순서로 정렬하는 단계;
상기 무인기국이 상기 적어도 하나의 중심 주파수에 대해서 수신한 할당 주파수 정보 메시지의 무인기 ID를 검증하는 단계; 및
상기 무인기 ID가 실제 무인기의 ID와 일치하는 경우, 상기 무인기국이 상기 주파수 정보 메시지에 기초하여 상기 상향링크의 슬롯 및 상기 하향링크 주파수를 설정하는 단계
를 포함하는 무인기 CNPC 접속 방법.
In Article 10,
The step of the drone setting the slot of the uplink and the downlink frequency based on the at least one center frequency is:
A step of arranging at least one center frequency in order of increasing signal energy;
The step of verifying the drone ID of the allocated frequency information message received by the drone for the at least one center frequency; and
If the above drone ID matches the ID of the actual drone, the drone station sets the slot of the uplink and the downlink frequency based on the frequency information message.
A method of accessing a drone CNPC including:
상기 설정하는 단계는,
주파수 관할청이 상기 무인기국에 할당된 상기 상향링크의 슬롯 및 상기 하향링크 주파수를 CNPC 네트워크에 통지하는 단계; 및
상기 CNPC 네트워크가 상기 지상국에 상기 상향링크의 슬롯 및 상기 하향링크 주파수를 설정하는 단계
를 포함하는 무인기 CNPC 접속 방법.In Article 10,
The steps to set up above are:
The step of the frequency management authority notifying the CNPC network of the slot of the uplink and the downlink frequency allocated to the drone station; and
The step of the above CNPC network setting the slot of the uplink and the frequency of the downlink to the above ground station
A method of accessing a drone CNPC including:
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/609,213US10429836B2 (en) | 2016-11-14 | 2017-05-31 | Channel access method in unmanned aerial vehicle (UAV) control and non-payload communication (CNPC) system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160150900 | 2016-11-14 | ||
| KR20160150900 | 2016-11-14 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20180054392A KR20180054392A (en) | 2018-05-24 |
| KR102802660B1true KR102802660B1 (en) | 2025-05-07 |
Family
ID=62297136
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160175379AActiveKR102802660B1 (en) | 2016-11-14 | 2016-12-21 | Method for contacting the channel of unmanned aerial vehicle(uav) control and non-payload communications(cnpc) system |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102802660B1 (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102459463B1 (en)* | 2018-07-02 | 2022-10-26 | 한국전자통신연구원 | Method for trasmitting data of unmanned aerial vehicle controlling system and apparatus for the same |
| KR102398483B1 (en)* | 2021-12-21 | 2022-05-16 | 국방과학연구소 | Uav frequency allocation method and system for adaptive allocation of large-capacity links |
| KR102682228B1 (en)* | 2023-09-18 | 2024-07-04 | 국방과학연구소 | Communication system, communication device and communication method for manned and unmanned complex collaboration system |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100733724B1 (en)* | 2005-10-21 | 2007-06-28 | 최진주 | Linearized Microwave Power Module |
| EP3179640A1 (en)* | 2008-09-27 | 2017-06-14 | WiTricity Corporation | Wireless energy transfer systems |
| AU2010213557A1 (en)* | 2009-02-13 | 2011-09-01 | Witricity Corporation | Wireless energy transfer in lossy environments |
| KR20140137124A (en)* | 2013-05-22 | 2014-12-02 | (주)코어센스 | Inspection apparatus for motor thrust of unmanned aerial vehicles |
- 2016
- 2016-12-21KRKR1020160175379Apatent/KR102802660B1/enactiveActive
Non-Patent Citations (1)
| Title |
|---|
| 무인기 제어용 무선통신 기술 및 표준화 동향, 김희욱 외 3인, 2015 Electronics and Telecommunications Trends, 방송통신미디어 기술특집 30권 3호 통권 153, ETRI (2015.06.01.)* |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20180054392A (en) | 2018-05-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10084615B2 (en) | Handover method and control transfer method | |
| US10429836B2 (en) | Channel access method in unmanned aerial vehicle (UAV) control and non-payload communication (CNPC) system | |
| KR102416473B1 (en) | Methods for Initial Channel Setting and Connection Establishment in UAS CNPC(Control and Non-Payload Communication) | |
| US10560180B2 (en) | Ground radio station (GRS) apparatus and radio station apparatus included in unmanned aerial vehicle (UAV) | |
| US10880899B2 (en) | Method and apparatus for selecting unmanned aerial vehicle control and non-payload communication channel on basis of channel interference analysis | |
| US10575312B2 (en) | Method of assigning channel for UAS control and non-payload communication (CNPC) system | |
| KR102535402B1 (en) | Method for handover operation and method for control transfer operation | |
| KR102419355B1 (en) | Methods and Procedures for Dynamic Channel Assignment and Change in UAS Control and Non-Payload Communication | |
| US20210319710A1 (en) | Broadcasting geolocation information in a radio frame transmitted from an unmanned aerial vehicle | |
| KR102321966B1 (en) | Method of assigning channel for uas control and non-payload communication(cnpc) system | |
| CN110364031A (en) | The path planning and wireless communications method of unmanned plane cluster in ground sensors network | |
| KR102802660B1 (en) | Method for contacting the channel of unmanned aerial vehicle(uav) control and non-payload communications(cnpc) system | |
| US9692500B2 (en) | Aircraft communications during different phases of flight | |
| WO2018210997A1 (en) | Communication system for aircrafts with altitude based frequency band selection | |
| CN111292559B (en) | Aircraft monitoring system and method of collecting data in an aircraft | |
| KR20200003523A (en) | Method for trasmitting data of unmanned aerial vehicle controlling system and apparatus for the same | |
| EP3100368A1 (en) | Wirelessly connecting an aircraft at an airport | |
| KR20180054393A (en) | Method for contacting the channel of unmanned aerial vehicle(uav) control and non-payload communications(cnpc) system in case of radio link failure | |
| US20240120986A1 (en) | Techniques for precoding air-to-air sidelink communications | |
| Hofmann et al. | Massive data transfer from and to aircraft on ground: Feasibility and challenges | |
| CN118870371A (en) | Base station signal coverage method, device, electronic device, storage medium and product | |
| KR102374261B1 (en) | Method of selecting operational frequency and sensing channel in licensed spectrum and system performing thereof | |
| KR102381070B1 (en) | System and Method for controlling of Unmanned Aerial Vehicle and Ground Control System with Multi Operation | |
| CN114938708B (en) | Information transmission method and device and storage medium | |
| Makropoulos et al. | Field trial of uav flight with communication and control through 5g cellular network |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application | Patent event code:PA01091R01D Comment text:Patent Application Patent event date:20161221 | |
| PG1501 | Laying open of application | ||
| PA0201 | Request for examination | Patent event code:PA02012R01D Patent event date:20211028 Comment text:Request for Examination of Application Patent event code:PA02011R01I Patent event date:20161221 Comment text:Patent Application | |
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection | Comment text:Notification of reason for refusal Patent event date:20240722 Patent event code:PE09021S01D | |
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration | Patent event code:PE07011S01D Comment text:Decision to Grant Registration Patent event date:20250305 | |
| PG1601 | Publication of registration |