KR102408381B1 - Drone havnig landing gear - Google Patents
Drone havnig landing gearDownload PDFInfo
- Publication number
- KR102408381B1 KR102408381B1KR1020200022227AKR20200022227AKR102408381B1KR 102408381 B1KR102408381 B1KR 102408381B1KR 1020200022227 AKR1020200022227 AKR 1020200022227AKR 20200022227 AKR20200022227 AKR 20200022227AKR 102408381 B1KR102408381 B1KR 102408381B1
- Authority
- KR
- South Korea
- Prior art keywords
- landing
- drone
- loading box
- landing device
- present
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C39/00—Aircraft not otherwise provided for
- B64C39/02—Aircraft not otherwise provided for characterised by special use
- B64C39/024—Aircraft not otherwise provided for characterised by special use of the remote controlled vehicle type, i.e. RPV
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U70/00—Launching, take-off or landing arrangements
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C25/00—Alighting gear
- B64C25/02—Undercarriages
- B64C25/08—Undercarriages non-fixed, e.g. jettisonable
- B64C25/10—Undercarriages non-fixed, e.g. jettisonable retractable, foldable, or the like
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C25/00—Alighting gear
- B64C25/32—Alighting gear characterised by elements which contact the ground or similar surface
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D1/00—Dropping, ejecting, releasing or receiving articles, liquids, or the like, in flight
- B64D1/02—Dropping, ejecting, or releasing articles
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D45/00—Aircraft indicators or protectors not otherwise provided for
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/10—Rotorcrafts
- B64U10/13—Flying platforms
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U60/00—Undercarriages
- B64U60/10—Undercarriages specially adapted for use on water
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U60/00—Undercarriages
- B64U60/50—Undercarriages with landing legs
- B64C2201/128—
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2101/00—UAVs specially adapted for particular uses or applications
- B64U2101/60—UAVs specially adapted for particular uses or applications for transporting passengers; for transporting goods other than weapons
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Mechanical Engineering (AREA)
- Remote Sensing (AREA)
- Toys (AREA)
- Traffic Control Systems (AREA)
Abstract
Translated fromKoreanDescription
Translated fromKorean본 발명은 스마트 착륙장치가 구비된 드론에 관한 것으로, 더욱 상세하게는 비행 시 하부 적재함을 안전하게 보호할 수 있고, 착륙스테이션에 대한 안정성을 확보할수 있는 스마트 착륙장치가 구비된 드론에 관한 것이다.The present invention relates to a drone equipped with a smart landing device, and more particularly, to a drone equipped with a smart landing device that can safely protect a lower loading box during flight and ensure stability for a landing station.
일반적으로 드론은 배터리의 전력을 이용하여 다수개의 프로펠러를 회전시킴으로써 하늘을 비행하는 무인 비행체의 일종으로, 사용자의 리모콘 조작이나 자동항법시스템에 의하여 비행이 가능하도록 구성된다.In general, a drone is a kind of unmanned aerial vehicle that flies in the sky by rotating a plurality of propellers using power from a battery, and is configured to be able to fly by a user's remote control operation or an automatic navigation system.
이와 같은 드론은, 처음에는 군사용 무인항공기로 개발되었으나 근래에는 기업, 미디어, 개인을 위한 용도로도 사용되고 있다.Such a drone was initially developed as an unmanned aerial vehicle for military use, but has recently been used for corporate, media, and personal purposes as well.
예를 들면, 신문사, 방송사 및 영화제작사 등은 드론을 촬영용 기기로 활용하고 있으며, 배달 업계에서는 드론을 이용하여 실제 배달 서비스에 활용하고 있다.For example, newspapers, broadcasters, and film production companies are using drones as filming devices, and the delivery industry is using drones for actual delivery services.
특히, 드론은 물류사업의 혁신을 일으킬 주역으로 지목되는데, 드론을 활용하여 화물을 배송하는 경우 적은 비용으로 안전하게 배송할 수 있으며, 일반도로가 아닌 하늘 길을 이용하므로 교통체증을 걱정할 필요없이 신속하게 화물을 배송할 수 있다.In particular, drones are pointed out as a major player in innovation in the logistics business. When using drones to deliver cargo, it can be delivered safely at a low cost, and because it uses the sky road instead of a general road, it can be delivered quickly without worrying about traffic jams. You can ship cargo.
아마존 등의 기업은 현재 드론을 이용하여 화물을 배송하거나 계획하고 있는데, 아마존은 2013년 12월'프라임 에어'라는 이름의 프로젝트를 발표하여 드론을 이용한 물류 배송을 상용화하고 있다. 이를 시작으로 드론을 이용한 다양한 배송서비스 운영이 세계 각국에서 시도되고 있다.Companies such as Amazon are currently using drones to deliver or plan to deliver cargo. Amazon announced a project called 'Prime Air' in December 2013 to commercialize logistics delivery using drones. Starting with this, various delivery services using drones are being tried in countries around the world.
그러나, 일반적으로 배송을 위한 드론의 경우 드론 본체의 하부에 적재함이 구비되어 비행하게 되는데 비행 시 바람 등의 외부 충격에 의해 적재함이 이탈되는 문제가 있다.However, in general, in the case of a drone for delivery, a loading box is provided at the bottom of the drone body to fly, but there is a problem in that the loading box is separated by an external impact such as wind during flight.
본 발명은 상기와 같은 문제점을 해결하기 위해 창안된 것으로서, 드론의 비행 시 하부 적재함의 이탈을 방지하고, 착륙 스테이션에 착륙 시 안정성을 확보할 수 있으며, 주문자에게 정확한 배송이 가능한 스마트 착륙장치가 구비된 드론을 제공하는데 그 목적이 있다.The present invention was devised to solve the above problems, and it is possible to prevent the departure of the lower loading box during the flight of the drone, to secure stability when landing at the landing station, and to provide a smart landing device capable of accurate delivery to the orderer. The purpose is to provide a built-in drone.
상기한 목적을 달성하기 위한 본 발명의 실시예에 따른 스마트 착륙장치가 구비된 드론은 드론본체와, 상기 드론본체의 하부에 방사상으로 회전가능하게 결합되어 펼쳐지거나 오무려져 비행 시 적재함을 감싸도록 구비된 복수의 착륙장치를 포함한다.A drone equipped with a smart landing device according to an embodiment of the present invention for achieving the above object is provided such that the drone body and the drone body are radially rotatably coupled to the lower part of the drone body and spread or folded to cover the loading box during flight. It includes a plurality of landing gear.
상술한 바와 같이, 본 발명의 실시예에 따른 스마트 착륙장치가 구비된 드론은 비행시 착륙장치가 적재함을 감싸 드론의 비행 시 하부 적재함의 이탈을 방지하고, 착륙 스테이션에 착륙 시 착륙장치가 착륙 스테이션에 결합되어 안정성을 확보할 수 있으며, 주문자의 인증 시 착륙장치가 오픈되어 주문자에게 정확한 배송이 가능하다.As described above, in the drone equipped with a smart landing device according to an embodiment of the present invention, the landing device wraps the loading box during flight to prevent the departure of the lower loading box during the flight of the drone, and when landing at the landing station, the landing device is installed at the landing station Safety can be secured by combining with the
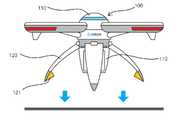
도 1은 본 발명의 실시예에 따른 스마트 착륙장치가 구비된 드론의 비행 시를 나타낸 도면.
도 2는 본 발명의 실시예에 따른 스마트 착륙장치가 구비된 드론의 착륙 시를 나타낸 도면.
도 3은 본 발명의 실시예에 따른 스마트 착륙장치가 구비된 드론이 고정형 착륙 스테이션에 착륙한 상태를 나타낸 도면.
도 4는 본 발명의 실시예에 따른 스마트 착륙장치가 구비된 드론의 착륙장치가 오픈된 상태를 나타낸 도면.
도 5 및 도 6은 본 발명의 실시예에 따른 스마트 착륙장치가 구비된 드론의 이동형 착륙 스테이션에 착륙한 상태를 나타낸 도면.
도 7은 본 발명의 실시예에 따른 스마트 착륙장치가 구비된 드론의 튜브가 펼쳐진 상태를 나타낸 도면.1 is a view showing the flight of a drone equipped with a smart landing device according to an embodiment of the present invention.
2 is a view showing the landing of a drone equipped with a smart landing device according to an embodiment of the present invention.
3 is a view showing a state in which a drone equipped with a smart landing device according to an embodiment of the present invention has landed on a fixed landing station.
4 is a view showing an open state of the landing device of a drone equipped with a smart landing device according to an embodiment of the present invention.
5 and 6 are diagrams illustrating a state in which a drone equipped with a smart landing device has landed on a mobile landing station according to an embodiment of the present invention.
7 is a view showing an unfolded state of a tube of a drone equipped with a smart landing device according to an embodiment of the present invention.
본 발명의 이점 및 특징, 그리고 그것들을 달성하는 기술 등은 첨부되는 도면들과 함께 상세하게 후술되어 있는 실시예를 참조하면 명확해질 것이다. 그러나 본 발명은 이하에서 개시되는 실시예에 한정되는 것이 아니라 서로 다른 다양한 형태로 구현된다. 본 실시예는 본 발명의 개시가 완전하도록 함과 더불어, 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자에게 발명의 범주를 완전하게 알려주기 위해 제공된다.Advantages and features of the present invention, and techniques for achieving them, etc. will become apparent with reference to the embodiments described below in detail in conjunction with the accompanying drawings. However, the present invention is not limited to the embodiments disclosed below, but is implemented in various different forms. This embodiment is provided so that the disclosure of the present invention is complete, and also to completely inform those of ordinary skill in the art to the scope of the present invention.
한편, 본 명세서에서 사용된 용어들은 실시예를 설명하기 위한 것이며 본 발명을 제한하고자 하는 것은 아니다. 본 명세서에서, 단수형은 문구에서 특별히 언급하지 않는 한 복수형도 포함한다. 명세서에서 사용되는 '포함한다(comprise)' 및/또는 '포함하는(comprising)'은 언급된 구성요소, 단계, 동작 및/또는 소자는 하나 이상의 다른 구성요소, 단계, 동작 및/또는 소자의 존재 또는 추가를 배제하지 않는다.On the other hand, the terms used herein are for the purpose of describing the embodiment, not intended to limit the present invention. In this specification, the singular also includes the plural unless otherwise specified in the phrase. As used herein, 'comprise' and/or 'comprising' means that a referenced component, step, operation and/or element is the presence of one or more other components, steps, operations and/or elements. or addition is not excluded.
부가적으로, 각 도면에 걸쳐 표시된 동일 참조 부호는 동일 구성 요소를 지칭하며, 본 발명의 설명된 실시예의 논의를 불필요하게 불명료하도록 하는 것을 피하기 위해 공지된 특징 및 기술의 상세한 설명은 생략된다.Additionally, like reference numerals indicated throughout each drawing refer to like elements, and detailed descriptions of well-known features and techniques are omitted to avoid unnecessarily obscuring the discussion of the described embodiments of the present invention.
도 1은 본 발명의 실시예에 따른 스마트 착륙장치가 구비된 드론의 비행 시를 나타낸 도면이고, 도 2는 본 발명의 실시예에 따른 스마트 착륙장치가 구비된 드론의 착륙 시를 나타낸 도면이며, 도 3은 본 발명의 실시예에 따른 스마트 착륙장치가 구비된 드론이 고정형 착륙 스테이션에 착륙한 상태를 나타낸 도면이고, 도 4는 본 발명의 실시예에 따른 스마트 착륙장치가 구비된 드론의 착륙장치가 오픈된 상태를 나타낸 도면이며, 도 5 및 도 6은 본 발명의 실시예에 따른 스마트 착륙장치가 구비된 드론의 이동형 착륙 스테이션에 착륙한 상태를 나타낸 도면이고, 도 7은 본 발명의 실시예에 따른 스마트 착륙장치가 구비된 드론의 튜브가 펼쳐진 상태를 나타낸 도면이다1 is a view showing the flight of a drone equipped with a smart landing device according to an embodiment of the present invention, and FIG. 2 is a view showing the landing of a drone equipped with a smart landing device according to an embodiment of the present invention, 3 is a view showing a state in which a drone equipped with a smart landing device according to an embodiment of the present invention has landed on a fixed landing station, and FIG. 4 is a landing device of a drone equipped with a smart landing device according to an embodiment of the present invention. is a view showing an open state, FIGS. 5 and 6 are views showing a state in which a drone equipped with a smart landing device has landed on a mobile landing station according to an embodiment of the present invention, and FIG. 7 is an embodiment of the present invention It is a diagram showing the unfolded state of the tube of a drone equipped with a smart landing device according to
도 1 및 도 2에 도시된 바와 같이, 본 발명의 실시예에 따른 스마트 착륙장치가 구비된 드론(100)은 드론본체(110) 및 착륙장치(120)를 포함한다.1 and 2 , the
상기 드론본체(110)는 네 개의 회전익(111)이 마주하는 것끼리 대칭을 이루도록 배열된 쿼드 콥터(Quad copter)를 예를 들어 설명한다.The
여기서, 상기 드론본체(110)는 제어 신호 등의 무선 신호를 송수신하기 위한 송수신기, 자세를 포함하는 전반적인 비행 제어를 위한 콘트롤러, 전원 공급을 위한 배터리, 위치 확인을 위한 GPS 수신기 등이 내장될 수 있다.Here, the
특히, 고객에게 직접 수화물을 수송하는 택배용으로 사용되기 위한 드론(100)은 그 특성상 수직 이륙과 착륙이 용이해야 한다. 이에 따라, 이륙 또는 착륙시에 일정 길이 이상의 활주로를 필요로 하는 고정익 형태의 비행체는 본 발명에 적합하지 않으나, 상기와 같은 문제를 해결하여 수직 이륙 및 수직 착륙이 가능한 경우에는 고정익 형태의 비행체도 본 발명에 적용 가능하다 할 것이다.In particular, the
여기서, 상기 드론본체(110)는 수송용으로서의 기능적인 측면이 부각되어야 하므로 하부에 수화물을 적재하기 위한 적재함(112)이 결합될 수 있다. 이때, 상기 적재함(112)의 형태나 크기는 다양하게 형성될 수 있으나, 후술되는 착륙장치(120)를 통해 보호될 수 있는 형태와 크기로 형성되는 것이 바람직하다.Here, the
상기 착륙장치(120)는 드론본체(110)의 하부에 복수개가 구비될 수 있으며, 방사상으로 회전가능하게 결합되어 펼쳐지거나 오무려져 비행 시 적재함(112)을 감싸도록 구비될 수 있다. 예컨대, 상기 착륙장치(120)는 4개가 구비되어 마주하는 것끼리 대칭을 이루도록 배열될 수 있다.A plurality of the
여기서, 상기 착륙장치(120)는 상단에서 하단으로 갈수록 너비가 좁아지도록 형성될 수 있으며, 외측으로 볼록하게 형성될 수 있다. 즉, 상기 착륙장치(120)가 오무려지면 끝단이 적재함(112)의 하부 중심부에 모이고, 볼록한 형태에 의해 형성된 내부 공간에는 적재함(112)이 배치되게 된다.Here, the
또한, 상기 착륙장치(120)는 드론본체(110)의 하부에 하부방향으로 결합될 수 있으며, 적재함(112)의 둘레를 따라 적재함(112)과 소정간격 이격되어 결합될 수 있다.In addition, the
이때, 상기 착륙장치(120)는 적재함(112)을 중심으로 방사상으로 회전가능하도록 힌지 결합될 수 있다.At this time, the
즉, 상기 착륙장치(120)는 펼쳐지면 적재함(112)을 중심으로 방사상으로 펼쳐지고, 오무려지면 적재함(112)의 측면부터 하면까지 전체를 감싸 적재함(112)을 보호할 수 있게 된다.That is, when the
상기와 같이 구성된 착륙장치(120)는 비행 시에는, 도 1에 도시된 바와 같이 오무려져 적재함(112)을 감싸고, 착륙 시에는, 도 2에 도시된 바와 같이 펼쳐져 끝단이 착륙지면에 닿아 드론본체(110)를 지지하게 된다.The
본 발명의 실시예에 따른 스마트 착륙장치가 구비된 드론(100)은, 도 3에 도시된 바와 같이 농구 골대와 같은 형태의 착륙 스테이션(10)의 경우에 착륙하는 경우 오무려진 착륙장치(120)가 착륙 스테이션(10)의 홀에 용이하게 삽입되어 착륙할 수 있으며, 착륙 후 도 4에 도시된 바와 같이 착륙장치(120)가 벌어져 안정적으로 고정될 수 있다. 이때, 회전익(111)의 하부에는 하부방향으로 돌출된 지지대(113)가 형성되어 드론본체(110)를 안정적으로 지지할 수 있으며, 회전익(111)이 파손되는 것을 방지할 수 있다.The
또한, 상기 착륙장치(120)는, 도 4에 도시된 바와 같이, 상기 적재함(112)에 적재된 물품을 수령하는 수령자가 접근하여 물품에 대한 수령자로 인증되면 펼쳐질 수 있다.In addition, as shown in FIG. 4 , the
예컨대, 상기 드론본체(110)의 내부에는 물품 배송을 관리하는 배송관리서버와 무선 통신을 위한 송수신기(도면 미도시)가 구비되어 물품을 수령하는 수령자가 접근하여 소지하고 있는 단말기를 통해 수령자가 인증되면 착륙장치(120)가 펼쳐저 수령자가 물품을 수령할 수 있게 된다. 이에 따라, 수령자를 인증한 후에 착륙장치(120)를 펼쳐 수령자가 물품을 수령할 수 있게 함으로써, 물품이 잘못 배송되는 것을 방지할 수 있다.For example, a delivery management server that manages delivery of goods and a transceiver (not shown) for wireless communication are provided inside the drone
한편, 본 발명의 실시예에 따른 스마트 착륙장치가 구비된 드론(100)은, 도 5에 도시된 바와 같이 착륙 스테이션(10)이 이동하는 차량에 설치되어 있는 경우 오무려진 착륙장치(120)가 차량의 지붕에 개방된 홀을 통해 용이하게 삽입되어 착륙할 수 있으며, 착륙 후 도 6에 도시된 바와 같이 착륙장치(120)가 벌어져 착륙장치(120)가 차량의 내측 상단을 지지함으로써 안정적으로 고정될 수 있다. 이때, 회전익(111)의 하부에는 하부방향으로 돌출된 지지대(113)가 형성되어 드론본체(110)를 안정적으로 지지할 수 있으며, 회전익(111)이 파손되는 것을 방지할 수 있다.On the other hand, in the
한편, 상기 착륙장치(120)는 하단에 구비되어 수분을 감지하는 수분감지 센서(도면 미도시)가 구비되어 수분감지 센서에서 수분이 감지되면 팽창되는 튜브(121)를 더 포함될 수 있다.On the other hand, the
여기서, 상기 튜브(121)는 착륙장치(120)의 끝단에 구비될 수 있으며, 드론(100)이 비상 발생 등으로 인하여 물위에 착륙하는 경우 수분감지 센서에서 수분이 감지되어 팽창됨으로써, 드론(100)이 물위에 착륙하여 침수되는 것을 방지할 수 있다.Here, the
이제까지 본 발명에 대하여 그 바람직한 실시예들을 중심으로 살펴보았다. 본 명세서를 통해 개시된 모든 실시예들과 조건부 예시들은, 본 발명의 기술 분야에서 통상의 지식을 가진 당업자가 독자가 본 발명의 원리와 개념을 이해하도록 돕기 위한 의도로 기술된 것으로, 당업자는 본 발명이 본 발명의 본질적인 특성에서 벗어나지 않는 범위에서 변형된 형태로 구현될 수 있음을 이해할 수 있을 것이다. 그러므로 개시된 실시예들은 한정적인 관점이 아니라 설명적인 관점에서 고려되어야 한다. 본 발명의 범위는 전술한 설명이 아니라 특허청구범위에 나타나 있으며, 그와 동등한 범위 내에 있는 모든 차이점은 본 발명에 포함된 것으로 해석되어야 할 것이다.So far, with respect to the present invention, the preferred embodiments have been looked at. All embodiments and conditional examples disclosed through this specification have been described with the intention of helping those of ordinary skill in the art to understand the principles and concepts of the present invention, and those skilled in the art It will be understood that the present invention may be implemented in a modified form without departing from the essential characteristics of the present invention. Therefore, the disclosed embodiments are to be considered in an illustrative rather than a restrictive sense. The scope of the present invention is indicated in the claims rather than the foregoing description, and all differences within the scope equivalent thereto should be construed as being included in the present invention.
100 : 드론
110 : 드론본체
111 : 회전익
112 : 적재함
120 : 착륙장치
121 : 튜브100: drone
110: drone body
111: rotorcraft
112: load box
120: landing gear
121: tube
Claims (5)
Translated fromKorean상기 드론본체의 하부에 방사상으로 회전가능하게 결합되어 펼쳐지거나 오무려져 비행 시 적재함을 감싸도록 구비된 복수의 착륙장치;
를 포함하되,
상기 착륙장치는
수분을 감지하는 수분감지 센서가 구비되어 상기 수분감지 센서에서 수분이 감지되면 팽창되는 튜브를 더 포함하고,
각각의 상기 착륙장치는 상단에서 하단으로 갈수록 너비가 좁아지는 형태로 형성되어 비행 시 복수의 상기 착륙장치가 오무려져 상기 적재함 전체를 감싸고, 착륙 시 복수의 상기 착륙장치가 펼쳐져 상기 드론본체를 지지하는 스마트 착륙장치가 구비된 드론.
drone body; and
A plurality of landing devices provided to be radially rotatably coupled to the lower portion of the drone body to cover the loading box when unfolded or folded in flight;
including,
The landing gear
A moisture sensor for detecting moisture is provided, further comprising a tube that expands when moisture is detected by the moisture sensor,
Each of the landing devices is formed in a shape that is narrower in width from the top to the bottom, so that a plurality of the landing devices are folded to cover the entire loading box during flight, and a plurality of the landing devices are unfolded to support the drone body during landing. Drone with landing gear.
상기 착륙장치는
상기 적재함에 적재된 물품을 수령하는 수령자가 접근하여 상기 물품에 대한 수령자로 인증되면 펼쳐지는 스마트 착륙장치가 구비된 드론.
According to claim 1,
The landing gear
A drone equipped with a smart landing device that unfolds when a recipient who receives the goods loaded in the loading box approaches and is authenticated as the recipient of the goods.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020200022227AKR102408381B1 (en) | 2020-02-24 | 2020-02-24 | Drone havnig landing gear |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020200022227AKR102408381B1 (en) | 2020-02-24 | 2020-02-24 | Drone havnig landing gear |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20210107951A KR20210107951A (en) | 2021-09-02 |
| KR102408381B1true KR102408381B1 (en) | 2022-06-13 |
Family
ID=77794214
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020200022227AActiveKR102408381B1 (en) | 2020-02-24 | 2020-02-24 | Drone havnig landing gear |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102408381B1 (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114013660A (en)* | 2021-11-09 | 2022-02-08 | 江苏科技大学 | Amphibious flight device recovered by unmanned water equipment |
| CN118025478B (en)* | 2024-04-12 | 2024-06-07 | 中国地震应急搜救中心 | Multi-functional many rotor unmanned aerial vehicle of emergency rescue |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2000076289A2 (en) | 1999-06-15 | 2000-12-21 | Arbortech Industries Ltd. | Air board |
| US20110068224A1 (en)* | 2009-09-02 | 2011-03-24 | Pusan National University Industry-University Cooperation Foundation | Unmanned Aerial Vehicle Having Spherical Loading Portion and Unmanned Ground Vehicle Therefor |
| WO2017083406A1 (en)* | 2015-11-10 | 2017-05-18 | Matternet, Inc. | Methods and systems for transportation using unmanned aerial vehicles |
| WO2017192488A1 (en)* | 2016-05-04 | 2017-11-09 | Wal-Mart Stores, Inc. | Systems and methods for transporting products via unmanned aerial vehicles |
| US20180105063A1 (en)* | 2015-09-19 | 2018-04-19 | Ningbo Wise Digital Technology Co., Ltd | Container comprising a battery, transportation system comprising the same and method thereof |
| US20180155028A1 (en) | 2016-04-29 | 2018-06-07 | United Parcel Service Of America, Inc. | Delivery vehicle including an unmanned aerial vehicle support mechanism |
| US20180244389A1 (en)* | 2017-02-22 | 2018-08-30 | Nolan M. Herlocker | Transport tool system for drone with separate control |
| US20190084674A1 (en) | 2015-09-23 | 2019-03-21 | Walmart Apollo, Llc | Portable unmanned delivery aircraft launch systems, and methods of delivering products utilizing aircraft launch systems |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20160092720A (en)* | 2015-01-28 | 2016-08-05 | 한국전자통신연구원 | docking device for landing and charging of vertical take off and landing aircraft |
| KR101743834B1 (en)* | 2015-10-12 | 2017-06-07 | 한국항공우주연구원 | Aircraft |
| KR101780454B1 (en) | 2016-06-14 | 2017-09-21 | 유콘시스템 주식회사 | Delivery device installed drone for parcel service |
| KR101914762B1 (en)* | 2017-03-24 | 2018-11-02 | 송문선 | Apparatus of carrier case with safety airbag for DRON and operating method thereof |
- 2020
- 2020-02-24KRKR1020200022227Apatent/KR102408381B1/enactiveActive
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2000076289A2 (en) | 1999-06-15 | 2000-12-21 | Arbortech Industries Ltd. | Air board |
| US20110068224A1 (en)* | 2009-09-02 | 2011-03-24 | Pusan National University Industry-University Cooperation Foundation | Unmanned Aerial Vehicle Having Spherical Loading Portion and Unmanned Ground Vehicle Therefor |
| US20180105063A1 (en)* | 2015-09-19 | 2018-04-19 | Ningbo Wise Digital Technology Co., Ltd | Container comprising a battery, transportation system comprising the same and method thereof |
| US20190084674A1 (en) | 2015-09-23 | 2019-03-21 | Walmart Apollo, Llc | Portable unmanned delivery aircraft launch systems, and methods of delivering products utilizing aircraft launch systems |
| WO2017083406A1 (en)* | 2015-11-10 | 2017-05-18 | Matternet, Inc. | Methods and systems for transportation using unmanned aerial vehicles |
| US20180155028A1 (en) | 2016-04-29 | 2018-06-07 | United Parcel Service Of America, Inc. | Delivery vehicle including an unmanned aerial vehicle support mechanism |
| US20190122172A1 (en) | 2016-04-29 | 2019-04-25 | United Parcel Service Of America, Inc. | Methods for parcel delivery and pickup via an unmanned aerial vehicle |
| WO2017192488A1 (en)* | 2016-05-04 | 2017-11-09 | Wal-Mart Stores, Inc. | Systems and methods for transporting products via unmanned aerial vehicles |
| US20180244389A1 (en)* | 2017-02-22 | 2018-08-30 | Nolan M. Herlocker | Transport tool system for drone with separate control |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20210107951A (en) | 2021-09-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11873091B2 (en) | Landing and payload loading structures | |
| US20200010214A1 (en) | Portable landing and take-off pad for an unmanned air aerial vehicle | |
| US12030629B2 (en) | Cellular communication devices and methods | |
| US9896182B1 (en) | Systems and methods for maneuvering a package following in-flight release from an unmanned aerial vehicle (UAV) | |
| EP3362360B1 (en) | Parachute control system for an unmanned aerial vehicle | |
| EP3882146B1 (en) | Apparatuses for releasing a payload from an aerial tether | |
| KR102408381B1 (en) | Drone havnig landing gear | |
| WO2021055403A1 (en) | Unmanned air aerial vehicle based delivery system | |
| US20160083115A1 (en) | Apparatus and methods for tethered aerial platform and system | |
| US20170032315A1 (en) | Aerial parcel delivery | |
| KR20180026374A (en) | Air transport aircraft | |
| US12269625B2 (en) | UAV parachute deployment systems and methods using a rotor guard | |
| US20250058894A1 (en) | System and method for tethered unmanned aerial vehicle takeoff, landing, and storage | |
| WO2021250763A1 (en) | Flying body and method for transporting load using same | |
| US20240217659A1 (en) | Payload Retrieval Apparatus with Extending Member For Use with a UAV | |
| US12384539B2 (en) | Payload retrieval apparatus with internal unlocking feature and security features for use with a UAV | |
| KR102670440B1 (en) | Foldable Delivery Box For Drone | |
| KR20250042983A (en) | Module Mounting Frame for Drones that can install various modules | |
| WO2024256798A1 (en) | Tethered aerostat |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application | Patent event code:PA01091R01D Comment text:Patent Application Patent event date:20200224 | |
| PA0201 | Request for examination | ||
| PE0902 | Notice of grounds for rejection | Comment text:Notification of reason for refusal Patent event date:20210121 Patent event code:PE09021S01D | |
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection | Comment text:Notification of reason for refusal Patent event date:20210728 Patent event code:PE09021S01D | |
| PG1501 | Laying open of application | ||
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration | Patent event code:PE07011S01D Comment text:Decision to Grant Registration Patent event date:20220531 | |
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment | Comment text:Registration of Establishment Patent event date:20220608 Patent event code:PR07011E01D | |
| PR1002 | Payment of registration fee | Payment date:20220608 End annual number:3 Start annual number:1 | |
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee | Payment date:20250609 Start annual number:4 End annual number:4 |