KR102389271B1 - Connecting system and method for indoor/outdoor spatial network data based on transitional space for indoor/outdoor navigation - Google Patents
Connecting system and method for indoor/outdoor spatial network data based on transitional space for indoor/outdoor navigationDownload PDFInfo
- Publication number
- KR102389271B1 KR102389271B1KR1020210180329AKR20210180329AKR102389271B1KR 102389271 B1KR102389271 B1KR 102389271B1KR 1020210180329 AKR1020210180329 AKR 1020210180329AKR 20210180329 AKR20210180329 AKR 20210180329AKR 102389271 B1KR102389271 B1KR 102389271B1
- Authority
- KR
- South Korea
- Prior art keywords
- indoor
- outdoor
- connection
- space
- node
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034methodMethods0.000titleclaimsabstractdescription52
- 238000006243chemical reactionMethods0.000abstractdescription6
- 238000012986modificationMethods0.000abstractdescription6
- 230000004048modificationEffects0.000abstractdescription6
- 238000010586diagramMethods0.000description14
- 238000013499data modelMethods0.000description6
- 230000007704transitionEffects0.000description6
- 230000010354integrationEffects0.000description4
- 238000012360testing methodMethods0.000description2
- 238000012546transferMethods0.000description2
- 230000000694effectsEffects0.000description1
- 239000000284extractSubstances0.000description1
- 238000005457optimizationMethods0.000description1
- 238000012732spatial analysisMethods0.000description1
- 238000012800visualizationMethods0.000description1
Images






Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3446—Details of route searching algorithms, e.g. Dijkstra, A*, arc-flags or using precalculated routes
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
- G01C21/206—Instruments for performing navigational calculations specially adapted for indoor navigation
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3453—Special cost functions, i.e. other than distance or default speed limit of road segments
- G01C21/3476—Special cost functions, i.e. other than distance or default speed limit of road segments using point of interest [POI] information, e.g. a route passing visible POIs
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3807—Creation or updating of map data characterised by the type of data
- G01C21/3811—Point data, e.g. Point of Interest [POI]
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3807—Creation or updating of map data characterised by the type of data
- G01C21/383—Indoor data
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3885—Transmission of map data to client devices; Reception of map data by client devices
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Navigation (AREA)
Abstract
Translated fromKoreanDescription
Translated fromKorean본 발명은 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템 및 방법에 관한 것으로, 보다 상세하게는 실내 공간과 실외 공간 사이의 공간(Transitonal Space: 예를 들어, 건물 앞 정원이나 열린 광장 등으로써 보행 통로 또는 연결 통로 역할을 하는 공간을 의미하며, 이하 '연결공간'이라 통칭하기로 함)에 대한 네트워크 데이터를 포함하는 통합된 실내외 공간 네트워크를 모델링함으로써 기존 실내 공간 네트워크 데이터 및 실외 공간 네트워크 데이터의 변환 또는 수정없이 실내외 내비게이션의 경로 결정을 위한 실내 공간 네트워크와 실외 공간 네트워크를 원활하게 연계할 수 있도록 하여 실내외 공간 네트워크 통합의 한계를 극복할 수 있는 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템 및 방법에 관한 것이다.The present invention relates to a connection space-based indoor/outdoor spatial network data connection system and method for indoor/outdoor navigation, and more particularly, to a space between an indoor space and an outdoor space (transitonal space: for example, a garden in front of a building or an open square, etc.) It refers to a space that serves as a walking passage or a connecting passage, hereinafter referred to as a 'connection space') by modeling an integrated indoor and outdoor spatial network including network data for existing indoor spatial network data and outdoor spatial network data. Connected space-based indoor/outdoor spatial network data linkage system for indoor/outdoor navigation that can overcome the limitations of indoor/outdoor spatial network integration by making it possible to seamlessly link indoor and outdoor spatial networks for route determination of indoor/outdoor navigation without conversion or modification and methods.
실세계는 실내 환경과 실외 환경으로 구성되어 있기 때문에 이를 표현하는 공간 데이터 또한 실외(outdoor) 공간 데이터와 실내(indoor) 공간 데이터로 분류되고 있으며, 기존의 공간 데이터를 활용하는 시스템 또한 분리되어 개발되고 있다.Since the real world consists of an indoor environment and an outdoor environment, spatial data representing them is also classified into outdoor spatial data and indoor spatial data, and systems using existing spatial data are also being developed separately. .
그러나 이러한 단편적인 공간 데이터의 분류는 공간 분석을 실외 또는 실내 공간 중 하나의 규모와 차원으로만 제한하게 되므로 실세계의 현상을 제대로 반영하지 못하게 된다. 즉, 실내 공간과 실외 공간으로 대표되는 위치 사이에는 연결 공간(Transitional Space)이 존재할 수 있는데, 기존의 단편적인 공간 데이터의 분류는 실내 공간 데이터와 실외 공간 데이터로만 대표되므로 실내 공간과 실외 공간 사이에 존재하는 연결 공간에 대해서는 제대로 표현되지 못하게 된다. 만약 공간 데이터의 목표가 물리적인 공간의 완전한 수치적 표현이라면 이러한 연결 공간에 대해서도 완전하게 표현할 수 있어야 한다. 특히 실내 공간은 매우 복잡하며 여러 개의 진입점이 있을 수 있으므로 실내 공간 데이터와 실외 공간 데이터의 연결이 단일 지점에 고정되어 있는 기존의 공간 데이터 모델로는 표현에 한계가 발생할 수 있다.However, this fragmentary classification of spatial data limits spatial analysis to only the scale and dimension of one of the outdoor or indoor spaces, and thus does not properly reflect real-world phenomena. In other words, a transitional space may exist between a location represented by an indoor space and an outdoor space. Since the existing fragmentary spatial data classification is only represented by indoor spatial data and outdoor spatial data, there is a gap between the indoor space and the outdoor space. For the existing connection space, it cannot be properly expressed. If the goal of spatial data is a complete numerical expression of a physical space, it should be able to fully express the connected space as well. In particular, since the indoor space is very complex and there may be multiple entry points, the existing spatial data model in which the connection of indoor spatial data and outdoor spatial data is fixed at a single point may cause limitations in expression.
또한 이러한 공간 데이터의 단편적 분류는 공간 데이터를 표현하는 데이터 모델의 다양화를 초래하게 되면서 실내 공간 데이터와 실외 공간 데이터의 통합에 많은 어려움을 초래하고 있으며, 아울러 내비게이션 애플리케이션도 실외 공간 또는 실내 공간으로 제한되므로 원활한 실내외 내비게이션의 애플리케이션을 개발하기 위해서는 실내 공간 데이터와 실외 공간 데이터의 통합이 필수적이다.In addition, this fragmentary classification of spatial data leads to diversification of data models that express spatial data, causing many difficulties in integrating indoor spatial data and outdoor spatial data. In addition, navigation applications are limited to outdoor space or indoor space. Therefore, integration of indoor spatial data and outdoor spatial data is essential in order to develop a seamless indoor/outdoor navigation application.
이와 관련하여 대한민국 공개특허 제10-2011-0083773호(2011.07.21 공개; 이하 '특허문헌1'이라 약칭함)에는, 실외 지리공간정보와 실내공간정보를 통합하여 표현할 수 있는 데이터 모델, 및 데이터 모델을 생성 및/또는 모델링 할 수 있는 시스템 및 방법에 관한 기술이 공지되어 있다.In this regard, Republic of Korea Patent Publication No. 10-2011-0083773 (published on Jul. 21, 2011; hereinafter abbreviated as 'Patent Document 1') discloses a data model that can integrate and express outdoor geospatial information and indoor spatial information, and data Techniques are known pertaining to systems and methods capable of creating and/or modeling models.
또한 대한민국 공개특허 제10-2013-0066353호(2013.06.20 공개; 이하 '특허문헌2'이라 약칭함)에는, 사용자 단말에 저장되어 있는 실외지도를 이용하여 목적지 인근까지 실외 경로를 탐색하여 제공한 후, 실내 지도를 다운로드받아 실내에 위치한 목적지까지의 경로를 재탐색하여 신속하게 목적지까지의 경로를 제공하는 실내외 연계 경로 탐색 방법 및 시스템에 관한 기술이 공지되어 있다.In addition, in Republic of Korea Patent Publication No. 10-2013-0066353 (published on June 20, 2013; hereafter abbreviated as 'Patent Document 2'), an outdoor route to the vicinity of the destination is searched using the outdoor map stored in the user terminal and provided. Thereafter, a technique related to an indoor/outdoor linkage route search method and system for downloading an indoor map and re-searching a route to a destination located indoors to quickly provide a route to the destination is known.
그러나 상기와 같은 종래의 기술은 시각화나 주소 지오코딩을 위한 기하학적 구조의 공통적 표현, 계산된 경로를 직접 연결하거나 실내 및 실외 공간에 걸친 통합 위치를 지정하는 방법으로써, 직접 연결 또는 초기 데이터의 수정이 필요한 기하학적 정보를 사용하게 되므로 필수적으로 데이터 변환과정이 수반되어 프로세스가 복잡해지는 단점이 있으며, 게다가 기존 데이터 모델들은 연결 공간을 고려하지 않고 실내 공간 데이터와 실외 공간 데이터를 연결하게 되므로 실외 공간 데이터와 실내 공간 데이터를 심리스(seamless)하게 연결해주지 못하는 등의 문제점이 있었다.However, the conventional technology as described above is a method of designating a common representation of a geometric structure for visualization or address geocoding, a method of directly connecting a calculated path, or designating an integrated location across indoor and outdoor spaces, so that direct connection or modification of initial data is not possible. Since necessary geometric information is used, there is a disadvantage that the data conversion process is necessarily accompanied and the process becomes complicated. In addition, existing data models connect indoor spatial data and outdoor spatial data without considering the connection space. There were problems such as not being able to seamlessly connect spatial data.
따라서 본 발명은 상기의 문제점을 해결하기 위해 도출한 것으로써, 본 발명이 해결하고자 하는 기술적 과제는, 실내 및 실외 공간 사이의 연결 공간에 대한 네트워크 데이터를 포함하는 통합된 실내외 공간 네트워크를 모델링하여 실내 공간 네트워크 데이터 및 실외 공간 네트워크 데이터의 변환 또는 수정없이 실내외 내비게이션의 경로 결정을 위한 실내 공간 네트워크와 실외 공간 네트워크를 원활하게 연계할 수 있도록 하는 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템 및 방법을 제공하고자 하는 것이다.Therefore, the present invention has been derived to solve the above problems, and the technical problem to be solved by the present invention is to model an integrated indoor and outdoor space network including network data for a connection space between indoor and outdoor spaces by modeling an indoor space. Connected space-based indoor/outdoor spatial network data linkage system and method for indoor/outdoor navigation that enables seamless connection between indoor and outdoor spatial networks for route determination of indoor/outdoor navigation without conversion or modification of spatial network data and outdoor spatial network data is intended to provide.
상기의 목적을 달성하기 위한 본 발명의 일 실시 형태는, 실내 공간 네트워크의 건물 출입구 노드를 선택하고 선택된 건물 출입구 노드와 가장 가까운 실외 공간 네트워크의 출입구 최근접 노드를 선택하는 노드 선택부, 선택된 실내 공간 네트워크의 건물 출입구 노드와 실외 공간 네트워크의 출입구 최근접 노드 사이에 존재하는 실내외 노드 연계를 위한 연결공간을 정의하는 연결공간 정의부, 정의된 연결공간 내의 보행 경로 또는 연결 경로를 탐색하여 연결공간의 유형을 분류하는 유형 분류부, 및 노드 선택부에서 선택된 건물 출입구 노드와 출입구 최근접 노드를 유형 분류부에서 분류된 유형별 연결공간을 기반으로 연계시키는 실내외 노드연결부를 포함하는, 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템이다.An embodiment of the present invention for achieving the above object is a node selector that selects a building entrance node of an indoor space network and selects a node closest to the entrance of the outdoor space network closest to the selected building entrance node, the selected indoor space A connection space definition unit that defines a connection space for linking indoor and outdoor nodes existing between the building entrance node of the network and the node closest to the entrance of the outdoor space network, and the type of connection space by exploring the walking path or connection path within the defined connection space Connection space base for indoor/outdoor navigation, including a type classification unit that classifies It is an indoor and outdoor spatial network data connection system.
상기의 목적을 달성하기 위한 본 발명의 다른 실시 형태는, 실내 공간 네트워크의 건물 출입구 노드를 선택하고 선택된 건물 출입구 노드와 가장 가까운 실외 공간 네트워크의 출입구 최근접 노드를 선택하는 노드 선택단계, 선택된 실내 공간 네트워크의 건물 출입구 노드와 실외 공간 네트워크의 출입구 최근접 노드 사이에 존재하는 실내외 노드 연계를 위한 연결공간을 정의하는 연결공간 정의단계, 정의된 연결공간 내의 보행 경로 또는 연결 경로를 탐색하여 연결공간의 유형을 분류하는 유형 분류단계, 및 노드 선택단계에서 선택된 건물 출입구 노드와 출입구 최근접 노드를 유형 분류단계에서 분류된 유형별 연결공간을 기반으로 연계시키는 실내외 노드연결단계를 포함하는, 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계방법이다.Another embodiment of the present invention for achieving the above object is a node selection step of selecting a building entrance node of an indoor space network and selecting a node closest to the entrance of the outdoor space network closest to the selected building entrance node, the selected indoor space The connection space definition step that defines the connection space for linking indoor and outdoor nodes existing between the building entrance node of the network and the node closest to the entrance of the outdoor space network, and the type of connection space by exploring the walking path or connection path within the defined connection space A connection space for indoor/outdoor navigation, comprising a type classification step of classifying It is a method of linking data based on indoor and outdoor spatial networks.
본 발명에 의하면, 실내 및 실외 공간 사이의 연결공간에 대한 네트워크 데이터를 포함하는 통합된 실내외 공간 네트워크를 모델링할 수 있게 되므로 기존 실내 공간 네트워크 데이터 및 실외 공간 네트워크 데이터를 직접 연결하거나 변환 또는 수정하는 프로세스 없이도 실내외 내비게이션의 경로 결정을 위한 실내 공간 네트워크와 실외 공간 네트워크를 원활하게 연계할 수 있게 되어, 실내외 공간 네트워크 통합의 한계를 극복할 수 있는 해결책을 제시할 수 있게 된다.According to the present invention, since it is possible to model an integrated indoor and outdoor spatial network including network data for a connection space between indoor and outdoor spaces, the process of directly connecting, converting, or modifying existing indoor spatial network data and outdoor spatial network data It is possible to seamlessly link indoor and outdoor spatial networks for route determination of indoor and outdoor navigation without the need for a solution, which can overcome the limitations of indoor and outdoor spatial network integration.
도 1은 본 발명에 의한 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계 개념을 설명하는 참고도이다.
도 2는 본 발명에 의한 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템의 구성을 예시한 블록도이다.
도 3의 (a) 내지 (c)는 본 발명에 의한 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템에서 정의되는 연결공간의 유형별 예시도이다.
도 4는 본 발명에 의한 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계방법을 예시한 동작 흐름도이다.
도 5는 본 발명에 의한 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계방법에서 이루어지는 연결공간의 유형별 그래프 기반 표현과정 예시도이다.
도 6은 본 발명에서 제안된 데이터 모델의 UML(Unified Modeling Language) 다이어그램이다.
도 7은 본 발명에 의한 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템 및 방법에서 수행되는 최적경로 탐색을 위한 시험 데이터의 예시도이다.
도 8은 3차원 공간에서 연계된 데이터를 이용한 수정된 Dijkstra 최단 경로 검색 기반의 최적 경로 탐색과정을 보여주는 예시도이다.1 is a reference diagram for explaining a connection space-based indoor/outdoor spatial network data connection concept for indoor/outdoor navigation according to the present invention.
2 is a block diagram illustrating the configuration of a connection space-based indoor/outdoor spatial network data linkage system for indoor/outdoor navigation according to the present invention.
3 (a) to (c) are exemplary diagrams for each type of connection space defined in the connection space-based indoor and outdoor spatial network data connection system for indoor and outdoor navigation according to the present invention.
4 is an operation flowchart illustrating a connection space-based indoor/outdoor spatial network data connection method for indoor/outdoor navigation according to the present invention.
5 is an exemplary diagram of a graph-based expression process for each type of connection space made in the method for linking data of a connection space-based indoor/outdoor spatial network for indoor/outdoor navigation according to the present invention.
6 is a UML (Unified Modeling Language) diagram of the data model proposed in the present invention.
7 is an exemplary diagram of test data for an optimal path search performed in the connected space-based indoor/outdoor spatial network data linkage system and method for indoor/outdoor navigation according to the present invention.
8 is an exemplary diagram illustrating an optimal path search process based on a modified Dijkstra shortest path search using linked data in a three-dimensional space.
이하, 본 발명의 바람직한 실시 형태에 따른 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템 및 방법의 구성과 동작 및 그에 의한 작용 효과를 첨부 도면을 참조하여 상세히 설명한다.Hereinafter, the configuration and operation of the connected space-based indoor/outdoor spatial network data linkage system and method for indoor/outdoor navigation according to a preferred embodiment of the present invention and the effects thereof will be described in detail with reference to the accompanying drawings.
본 명세서 및 청구범위에 사용된 용어나 단어는 통상적이거나 사전적인 의미로 한정 해석되지 아니하며, 발명자는 그 자신의 발명을 가장 최선의 방법으로 설명하기 위해 용어의 개념을 적절하게 정의할 수 있다는 원칙에 입각하여 본 발명의 기술적 사상에 부합하는 의미와 개념으로 해석되어야만 한다. 따라서, 본 명세서에 기재된 실시 예와 도면에 도시된 구성은 본 발명의 가장 바람직한 일 실시 예에 불과할 뿐이므로, 본 출원시점에 있어서 이들을 대체할 수 있는 다양한 균등물과 변형예들이 있을 수 있음을 이해하여야 한다.The terms or words used in the present specification and claims are not to be construed as limited in their ordinary or dictionary meanings, and on the principle that the inventor can appropriately define the concept of the term in order to best describe his invention. It should be interpreted as meaning and concept consistent with the technical idea of the present invention. Therefore, since the embodiments described in this specification and the configurations shown in the drawings are only the most preferred embodiment of the present invention, it is understood that there may be various equivalents and modifications that can be substituted for them at the time of the present application. shall.
도 1은 본 발명에 의한 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계 개념을 설명하는 참고도이고, 도 2는 본 발명에 의한 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템의 구성을 예시한 블록도이며, 도 3의 (a) 내지 (c)는 본 발명에 의한 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템에서 정의되는 연결공간의 유형별 예시도로써, 도 1에 예시된 바와 같이 본 발명은 실내 및 실외 공간 사이의 연결 공간에 대한 네트워크 데이터를 포함하는 통합된 실내외 공간 네트워크를 모델링하는 기술이며, 본 발명에 따른 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템은 도 2에 예시된 바와 같이 노드 선택부(110), 연결공간 정의부(120), 유형 분류부(130), 및 실내외 노드연결부(140)를 포함하여 구성될 수 있다. 이러한 본 발명의 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템은 실내외 내비게이션 시스템에 하드웨어 또는 소프트웨어 중의 어느 하나의 형태로 탑재되어 운용될 수 있다.1 is a reference diagram for explaining the concept of connection space-based indoor/outdoor spatial network data linkage for indoor/outdoor navigation according to the present invention, and FIG. 2 is a connection space-based indoor/outdoor spatial network data linkage system for indoor/outdoor navigation according to the present invention. It is an exemplary block diagram, and (a) to (c) of FIG. 3 are exemplary diagrams for each type of connection space defined in the connection space-based indoor/outdoor spatial network data connection system for indoor/outdoor navigation according to the present invention, as illustrated in FIG. As described above, the present invention is a technology for modeling an integrated indoor/outdoor spatial network including network data for a connection space between indoor and outdoor spaces, and a connection space-based indoor/outdoor spatial network data linkage system for indoor/outdoor navigation according to the present invention is shown in FIG. 2 , it may be configured to include a
노드 선택부(110)는 실내 공간 네트워크에서 건물 출입구를 표현하는 노드(이하에서는 '건물 출입구 노드'라 통칭하기로 함)를 선택하고 선택된 건물 출입구 노드와 가장 가까운 실외 네트워크 상의 노드(이하에서는 '출입구 최근접 노드'라 통칭하기로 함)를 실외 공간 네트워크에서 선택한다.The
연결공간 정의부(120)는 노드 선택부(110)에서 선택된 실내 공간 네트워크의 건물 출입구 노드와 실외 공간 네트워크의 출입구 최근접 노드 사이에 존재하는 실내외 노드 연계를 위한 연결공간을 정의한다. 이러한 연결공간은 도 3의 (a) 내지 (c)에 예시된 바와 같이 크게 세가지로 정의될 수 있다.The connection
첫번째는 실내 공간의 끝지점이 이미 실외 공간의 일부인 경우로써, 예를 들어 건물의 출구가 이미 도로와 연결되어 있는 주차장 등과 같이 실내 공간 네트워크의 건물 출입구 노드를 단일의 이동 링크(Transfer_Link)를 사용하여 실외 공간 네트워크의 출입구 최근접 노드에 직접 연계 가능한 직접 연계형 연결공간이다. 이러한 직접 연계형 연결공간의 경우 도 3의 (a)에 예시된 바와 같이 보행 경로 또는 연결 경로가 존재하지 않는다.The first is a case where the end point of the indoor space is already part of the outdoor space. For example, a building entrance node in the indoor space network, such as a parking lot where the exit of a building is already connected to a road, can be moved using a single transfer link (Transfer_Link). It is a direct connection type connection space that can be directly connected to the node closest to the entrance of the outdoor spatial network. In the case of such a direct connection type connection space, as illustrated in (a) of FIG. 3 , there is no walking path or connection path.
두번째는 실내 공간과 실외 공간 사이에 보행 통로 또는 연결 통로 역할을 하는 짧은 경로나 소형 공간이 존재하는 경우로써, 실내 공간 네트워크의 건물 출입구 노드를 단일 엣지와 2개의 이동 링크를 사용하여 실외 공간 네트워크의 출입구 최근접 노드에 간접 연계 가능한 소형 중간 연계형 연결공간이다. 이러한 소형 중간 연계형 연결공간의 경우 도 3의 (b)에 예시된 바와 같이 보행 경로 또는 연결 경로가 단일 엣지와 2개의 노드로 표현될 수 있으며 양쪽 끝에는 각각 실내 공간 네트워크 및 실외 공간 네트워크로의 연계를 위한 이동 링크를 가질 수 있고, 특히 건물 밀도가 낮은 지역에서 흔히 볼 수 있으며, 건물의 출구는 도로 네트워크의 일부가 아니지만 쉽게 접근할 수 있는 경우이다.In the second case, there is a short path or a small space that serves as a walking passage or a connecting passage between the indoor space and the outdoor space. It is a small intermediate connection type connection space that can be indirectly connected to the node closest to the entrance. In the case of such a small intermediate connection space, as illustrated in FIG. 3(b) , a walking path or a connection path can be expressed as a single edge and two nodes, and at both ends, the connection to the indoor spatial network and the outdoor spatial network, respectively. may have a moving link for the traffic, especially in areas with low building density, where the exit of a building is not part of the road network but is easily accessible.
세번째는 실내 공간과 실외 공간 사이의 건물 앞 정원이나 열린 광장 등의 보행 통로 또는 연결 통로 역할을 하는 대형 공간이 존재하는 경우로써, 실내 공간 네트워크의 건물 출입구 노드를 복수 개의 엣지와 2개의 이동 링크를 사용하여 실외 공간 네트워크의 출입구 최근접 노드에 간접 연계 가능한 대형 중간 연계형 연결공간이다. 이러한 대형 중간 연계형 연결공간은 가장 일반적인 경우로써 광장과 같은 개방된 공간이 건물 출구와 도로의 사이에 존재하며, 도 3의 (c)에 예시된 바와 같이 보행 경로 또는 연결 경로가 2개 이상의 엣지와 3개 이상의 노드로 표현되는 이동 그래프(TransferGraph)로 모델링될 수 있다. 이러한 대형 중간 연계형 열린공간에는 광장과 같은 개별적인 탐색 경로 네트워크가 존재할 수 있다.The third is a case in which a large space that serves as a pedestrian passage or a connecting passage such as a garden or an open square in front of a building exists between the indoor space and the outdoor space. It is a large intermediate connection type connection space that can be indirectly connected to the node closest to the entrance of the outdoor space network by using it. Such a large intermediate connection type connection space is the most common case, and an open space such as a square exists between the building exit and the road, and as illustrated in FIG. And it can be modeled as a transfer graph represented by three or more nodes. In such a large intermediate interconnected open space, an individual search path network such as a plaza may exist.
유형 분류부(130)는 연결공간 정의부(120)에서 정의된 연결공간 내의 보행 경로 또는 연결 경로를 탐색하여 연결공간의 유형을 분류한다. 이를 위하여 유형 분류부(130)는 이동그래프(Transition Graph) 모델링부(131), 크기 분류부(132), 및 최근접노드 탐색부(133)를 포함하여 구성될 수도 있다.The
이동그래프 모델링부(131)는 연결공간 정의부(120)에서 정의된 연결공간 내의 보행 경로 또는 연결 경로를 탐색하여 연결공간 내의 보행 경로 또는 연결 경로의 유/무에 따라 연결공간의 유형을 중간 연계형 또는 직접 연계형으로 분류한다. 이때 이동그래프 모델링부(131)는 연결공간 내의 보행 경로 또는 연결 경로가 있는 경우 중간 연계형(도 3의 (b)와 (c) 참조)으로 분류하고, 연결공간 내의 보행 경로 또는 연결 경로가 없는 경우 직접 연계형(도 3의 (a) 참조)으로 분류할 수 있다.The movement
이후 이동그래프 모델링부(131)는 탐색된 연결공간의 보행 경로 또는 연결 경로를 실내 공간 네트워크의 건물 출입구 노드 및 실외 공간 네트워크의 출입구 최근접 노드에 연계하기 위한 중복노드를 생성하고 연결 공간 내에 존재할 수 있는 가항 공간(navigable spaces)을 추출한다. 가항 공간이 없는 경우 이동그래프 모델링부(131)는 경로 표현을 위해 엣지를 연결하여 단일 엣지와 2개 이하의 노드로 표현되는 이동그래프(도 3의 (b) 참조)를 모델링한다. 반면에 가항 공간이 있는 경우 이동그래프 모델링부(131)는 가항 공간에 대한 나머지 노드와 엣지를 생성하기 위해 이중화(pointcare duality) 과정을 거쳐 가항 공간의 노드를 생성하고 노드의 연결성 표현을 위한 엣지를 생성하여 2개 이상의 엣지와 3개 이상의 노드로 표현되는 이동그래프(도 3의 (c) 참조)를 모델링한다.After that, the movement
크기 분류부(132)는 이동그래프 모델링부(131)에서 모델링된 이동그래프 상의 엣지(또는 노드 또는 가항 공간 유/무)에 따라 중간 연계형 연결공간의 크기를 소형 또는 대형으로 분류한다. 이러한 크기 분류부(132)에서는 이동그래프 모델링부(131)에서 모델링된 이동그래프 상의 엣지를 체크하여 예를 들면 엣지가 1개 이하인 경우 소형 중간 연계형 연결공간으로 분류하고, 엣지가 복수 개(또는 2개 이상)인 경우 대형 중간 연계형 연결공간으로 분류할 수 있다. 또한 이러한 크기 분류부(132)에서는 이동그래프 모델링부(131)에서 모델링된 이동그래프 상의 노드를 체크하여 예를 들면 노드가 2개 이하인 경우 소형 중간 연계형 연결공간으로 분류하고, 노드가 3개 이상인 경우 대형 중간 연계형 연결공간으로 분류할 수 있다. 또한 이러한 크기 분류부(132)에서는 이동그래프 모델링부(131)에서 모델링된 이동그래프 상의 가항 공간 유/무를 체크하여 예를 들면 가항 공간이 없는 경우 소형 중간 연계형 연결공간으로 분류하고, 가항 공간이 있는 경우 대형 중간 연계형 연결공간으로 분류할 수 있다.The
최근접노드 탐색부(133)는 크기 분류부(132)에서 대형으로 분류된 중간 연계형 연결공간에 대하여 실내 공간 네트워크의 건물 출입구 노드와 가장 가까운 이동그래프 상의 실내측 최근접노드 및 실외 공간 네트워크의 출입구 최근접 노드와 가장 가까운 이동그래프 상의 실외측 최근접노드를 각각 탐색한다.The nearest
실내외 노드연결부(140)는 노드 선택부(110)에서 선택된 건물 출입구 노드와 출입구 최근접 노드를 유형 분류부(130)에서 분류된 유형별 연결공간을 기반으로 연계시킨다. 즉 이러한 실내외 노드연결부(140)에서는 유형 분류부(130)를 통해 직접 연계형으로 분류된 연결공간의 경우 노드 선택부(110)에서 선택된 건물 출입구 노드와 출입구 최근접 노드를 단일의 이동 링크를 이용하여 직접 연계시킨다. 또한 실내외 노드연결부(140)에서는 유형 분류부(130)를 통해 소형으로 분류된 중간 연계형 연결공간의 경우 이동그래프 상의 엣지 양측 노드를 각각의 이동 링크를 이용하여 실내 공간 네트워크의 건물 출입구 노드 및 실외 공간 네트워크의 출입구 최근접 노드와 각각 연계시킨다. 또한 실내외 노드연결부(140)에서는 유형 분류부(130)를 통해 대형으로 분류된 중간 연계형 연결공간의 경우 최근접노드 탐색부(133)에서 탐색된 이동그래프 상의 실내측 최근접노드와 이동그래프 상의 실외측 최근접노드를 각각의 이동 링크를 이용하여 실내 공간 네트워크의 건물 출입구 노드 및 실외 공간 네트워크의 출입구 최근접 노드와 각각 연계시킨다.The indoor/outdoor
도 4는 본 발명에 의한 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계방법을 예시한 동작 흐름도이고, 도 5는 본 발명에 의한 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계방법에서 이루어지는 연결공간의 유형별 그래프 기반 표현과정 예시도로써, 도 4 및 도 5에 예시된 바와 같이 본 발명에 따른 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계방법은, 노드 선택단계(S110), 연결공간 정의단계(S120), 유형 분류단계(S130), 및 실내외 노드연결단계(S140)를 포함하여 이루어질 수 있으며, 이러한 본 발명의 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계방법도 실내외 내비게이션 시스템에 하드웨어 또는 소프트웨어 중의 어느 하나의 형태로 탑재되어 운용될 수 있다.4 is an operation flowchart illustrating a connection space-based indoor/outdoor spatial network data connection method for indoor/outdoor navigation according to the present invention, and FIG. 5 is a connection space-based indoor/outdoor spatial network data connection method for indoor/outdoor navigation according to the present invention. As an exemplary diagram of a graph-based expression process for each type of space, as illustrated in FIGS. 4 and 5, the method for linking indoor/outdoor spatial network data based on a connected space for indoor/outdoor navigation according to the present invention includes a node selection step (S110), a connection space definition Step (S120), type classification step (S130), and indoor/outdoor node connection step (S140) may be included, and the connection space-based indoor/outdoor spatial network data connection method for indoor/outdoor navigation of the present invention is also included in the indoor/outdoor navigation system in hardware. Alternatively, it may be installed and operated in any one form of software.
노드 선택단계(S110)는 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템의 노드 선택부(110)에 의해 수행되는 프로세스로써, 실내 공간 네트워크에서 건물 출입구를 표현하는 건물 출입구 노드를 선택하고 선택된 건물 출입구 노드와 가장 가까운 실외 네트워크 상의 출입구 최근접 노드를 실외 공간 네트워크에서 선택하는 단계이다.The node selection step (S110) is a process performed by the
연결공간 정의단계(S120)는 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템의 연결공간 정의부(120)에 의해 수행되는 프로세스로써, 노드 선택단계(S110)에서 선택된 실내 공간 네트워크의 건물 출입구 노드와 실외 공간 네트워크의 출입구 최근접 노드 사이에 존재하는 실내외 노드 연계를 위한 연결공간을 정의하는 단계이다. 이러한 연결공간 정의단계(S120)에서는 예를 들어 첫째 실내 공간의 끝지점이 이미 실외 공간의 일부인 경우로써 단일 이동 링크를 사용하여 직접 연계 가능한 직접 연계형 연결공간, 둘째 실내 공간과 실외 공간 사이의 건물 앞 정원이나 열린 광장 등의 보행 통로 또는 연결 통로 역할을 하는 소형 공간이 존재하는 경우로써 단일 엣지와 2개의 이동 링크를 사용하여 간접 연계 가능한 소형 중간 연계형 연결공간, 셋째 실내 공간과 실외 공간 사이의 건물 앞 정원이나 열린 광장 등의 보행 통로 또는 연결 통로 역할을 하는 대형 공간이 존재하는 경우로써 복수 개의 엣지와 2개의 이동 링크를 사용하여 간접 연계 가능한 대형 중간 연계형 연결공간을 정의한다.The connection space definition step (S120) is a process performed by the connection
유형 분류단계(S130)는 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템의 유형 분류부(130)에 의해 수행되는 프로세스로써, 연결공간 정의단계(S120)에서 정의된 연결공간 내의 보행 경로 또는 연결 경로를 탐색하여 연결공간의 유형을 분류하는 단계이다.The type classification step (S130) is a process performed by the
이러한 유형 분류단계(S130)는 이동그래프 모델링단계(S131-S133), 크기 분류단계(S134), 최근접노드 탐색단계(S135)를 포함하여 이루어질 수 있다.This type classification step (S130) may include a moving graph modeling step (S131-S133), a size classification step (S134), and a nearest node search step (S135).
이동그래프 모델링단계(S131-S133)는 연결공간 내의 보행 경로 또는 연결 경로를 탐색하는 단계(S131), 탐색된 보행 경로 또는 연결 경로의 유/무에 따라 연결공간의 유형을 중간 연계형 또는 직접 연계형으로 분류하는 단계(S132), 및 중간 연계형으로 분류된 연결공간 내 보행 경로 또는 연결 경로를 모델링하는 단계(S133)를 포함하여 구성될 수 있다. 이러한 연결공간의 유형 분류는 연결공간 내의 보행 경로 또는 연결 경로가 있는 경우 중간 연계형으로 분류되고, 상기 연결공간 내의 보행 경로 또는 연결 경로가 없는 경우 직접 연계형으로 분류된다.The moving graph modeling step (S131-S133) is a step (S131) of searching for a walking path or a connection path in the connection space, and depending on the presence/absence of the searched walking path or connection path, the type of the connection space is intermediately linked or directly linked. It may be configured to include a step (S132) of classifying into a type, and a step (S133) of modeling a walking path or a connection path in a connection space classified as an intermediate connection type. The type classification of the connection space is classified as an intermediate connection type when there is a walking path or a connection path in the connection space, and is classified as a direct connection type when there is no walking path or connection path in the connection space.
이러한 보행 경로 또는 연결 경로 모델링 단계(133)에서는 도 5에 예시된 바와 같이 탐색된 보행 경로 또는 연결 경로를 실내 공간 네트워크의 건물 출입구 노드 및 실외 공간 네트워크의 출입구 최근접 노드에 연계하기 위한 중복노드를 생성하고, 연결공간 내 가항 공간(navigable spaces)을 추출하여 가항 공간이 없는 경우 경로 표현을 위해 엣지를 연결하여 단일 엣지와 2개 이하의 노드로 표현되는 이동그래프(도 3의 (b) 참조)를 모델링하고, 가항 공간이 있는 경우 가항 공간에 대한 나머지 노드와 엣지를 생성하기 위해 이중화(pointcare duality) 과정을 거쳐 가항 공간의 노드를 생성하고 노드의 연결성 표현을 위한 엣지를 생성하여 2개 이상의 엣지와 3개 이상의 노드로 표현되는 이동그래프(도 3의 (c) 참조)를 모델링한다.In this walking path or connection
크기 분류단계(S134)는 이동그래프 모델링단계(S131-S133)에서 모델링된 이동그래프 상의 엣지(또는 노드 또는 가항 공간 유/무)에 따라 중간 연계형 연결공간의 크기를 소형 또는 대형으로 분류하는 단계이다. 이러한 크기 분류단계(S135)에서는 이동그래프 모델링단계(S131-S133)에서 모델링된 이동그래프 상의 엣지가 1개 이하(또는 노드가 2개 이하 또는 가항 공간이 없는)인 경우 소형 중간 연계형 연결공간으로 분류하고, 이동그래프 모델링단계(S131-S133)에서 모델링된 이동그래프 상의 엣지가 복수 개(2개) 이상(또는 노드가 3개 이상 또는 가항 공간이 있는)인 경우 대형 중간 연계형 연결공간으로 분류한다.The size classification step (S134) is a step of classifying the size of the intermediate linkage connection space into small or large according to the edge (or node or navigable space presence/absence) on the moving graph modeled in the moving graph modeling step (S131-S133). am. In this size classification step (S135), when the number of edges on the moving graph modeled in the moving graph modeling step (S131-S133) is one or less (or two or less nodes or no navigable space), it is a small intermediate linkage space. Classify and classify as a large intermediate linkage space when there are more than two (2) or more edges (or three or more nodes or navigable space) on the moving graph modeled in the moving graph modeling step (S131-S133) do.
최근접노드 탐색단계(S135)는 대형으로 분류된 중간 연계형 연결공간에 대하여 실내 공간 네트워크의 건물 출입구 노드와 가장 가까운 이동그래프 상의 실내측 최근접 노드 및 실외 공간 네트워크의 출입구 최근접 노드와 가장 가까운 이동그래프 상의 실외측 최근접 노드를 각각 탐색하는 단계이다.In the nearest node search step (S135), the closest node to the nearest indoor node on the moving graph closest to the building entrance node of the indoor space network and the closest node to the closest node to the doorway closest node of the outdoor space network for the medium-linked connection space classified as large. It is a step of searching for each of the outdoor-side nearest nodes on the moving graph.
실내외 노드연결단계(S140)는 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템의 실내외 노드연결부(140)에 의해 수행되는 프로세스로써, 노드 선택단계(S110)에서 선택된 건물 출입구 노드와 출입구 최근접 노드를 유형 분류단계(S130)를 통해 분류된 유형별 연결공간을 기반으로 연계시키는 단계이다.The indoor/outdoor node connection step (S140) is a process performed by the indoor/outdoor
이러한 실내외 노드 연결단계(S140)에서는 유형 분류단계(S130)를 통해 직접 연계형으로 분류된 연결공간의 경우 노드 선택단계(S110)에서 선택된 건물 출입구 노드와 출입구 최근접 노드를 단일의 이동 링크를 이용하여 직접 연계(S141)시키고, 유형 분류단계(S130)를 통해 소형으로 분류된 중간 연계형 연결공간의 경우 이동그래프 상의 엣지 양측 노드를 각각의 이동 링크를 이용하여 실내 공간 네트워크의 건물 출입구 노드 및 실외 공간 네트워크의 출입구 최근접 노드와 각각 연계(S142)시키며, 유형 분류단계(S130)를 통해 대형으로 분류된 중간 연계형 연결공간의 경우 탐색된 이동그래프 상의 실내측 최근접 노드와 이동그래프 상의 실외측 최근접 노드를 각각의 이동 링크를 이용하여 실내 공간 네트워크의 건물 출입구 노드 및 실외 공간 네트워크의 출입구 최근접 노드와 각각 연계(S143)시킨다.In this indoor/outdoor node connection step (S140), in the case of a connection space classified as a direct connection type through the type classification step (S130), the building entrance node selected in the node selection step (S110) and the closest node to the entrance are connected using a single moving link. to directly link (S141), and in the case of an intermediate linkage-type connection space classified as small through the type classification step (S130), the nodes on both sides of the edge on the moving graph are connected to the building entrance node and the outdoor node of the indoor space network using each moving link. In the case of a middle-linked connected space classified as large through the type classification step (S130), it is linked (S142) with the node closest to the entrance of the spatial network, the indoor closest node on the searched moving graph and the outdoor side on the moving graph The nearest node is linked with the building entrance node of the indoor spatial network and the node closest to the entrance of the outdoor spatial network using respective mobile links ( S143 ).
도 6은 본 발명에서 제안된 데이터 모델의 UML(Unified Modeling Language) 다이어그램이다. 이 모델은 실내 내비게이션 네트워크 데이터의 국제 표준인 OGC IndoorGML의 Core 모델을 기반으로 한다. 특히, 본 발명의 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템 및 방법의 실내외 공간 연계는 실외 네트워크와 실내 네트워크의 위치 사이에 설정된 연관 관계를 기반으로 한다. 따라서 Transfer_Link는 위상 정보를 통해 탐색 가능한 공간을 나타내는 실내 및 실외 네트워크 데이터를 연결하여 기존 입력 실내 및 실외 데이터를 변환 또는 수정 없이 연계할 수 있다. 또한 Transition Graph는 노드와 엣지로 구성된 네트워크이기 때문에 도 6의 UML 모델에서 Space Layer의 인스턴스로 표현된다. Transfer_Link는 Abstract Feature 클래스를 상속받으며, 임피던스 '0'에 대한 추가 가중치 속성을 갖는다. 이 가중치는 동일한 공간을 연계를 위해 중복 표현한 두 노드 사이의 관계만 나타낸다는 것을 의미한다. Transfer_Link는 실내 공간과 연결하기 위해 State 클래스와 연결되고 연결공간과 연계하기 위해 Transition Graph와 연결된다. 도로 네트워크는 모든 데이터 형식이 될 수 있음을 의미하는 External Network 클래스로 표현되며, 이는 IndoorGML Core 모듈의 External Reference와 연결된다.6 is a UML (Unified Modeling Language) diagram of the data model proposed in the present invention. This model is based on the Core model of OGC IndoorGML, an international standard for indoor navigation network data. In particular, the indoor/outdoor spatial linkage of the connected space-based indoor/outdoor spatial network data linkage system and method for indoor/outdoor navigation of the present invention is based on a relationship established between the location of the outdoor network and the indoor network. Therefore, Transfer_Link connects indoor and outdoor network data representing a searchable space through topology information, so that existing input indoor and outdoor data can be linked without conversion or modification. In addition, since the Transition Graph is a network composed of nodes and edges, it is expressed as an instance of the Space Layer in the UML model of FIG. 6 . Transfer_Link inherits the Abstract Feature class and has an additional weight property for impedance '0'. This weight means that only the relationship between two nodes that overlapped the same space for connection is indicated. Transfer_Link is connected to the State class to connect with the indoor space and to the Transition Graph to link with the connecting space. The road network is expressed as an External Network class, which means that it can be of any data format, and is connected with the External Reference of the IndoorGML Core module.
따라서 Transfer_Links는 하나 이상의 액세스 지점을 건물에 연결할 수 있으며, 이를 통해 실외 도로망에도 연결할 수 있다. 이는 위상 관계를 기반하기 때문에 서로 다른 데이터 스키마를 가진 서로 다른 데이터 세트를 연결할 수 있어 응용 프로그램이 더 유연해지는 동시에 전환 공간의 실제 조건을 보다 현실적으로 나타낼 수 있다. 따라서 각각의 데이터 형식에 관계없이 실내 및 실외 네트워크 간의 연결을 위해 데이터 형식의 변환이 필요하지 않다. Transfer_Link를 통해 연계된 실내 및 실외 공간 네트워크 데이터 셋에 경로탐색이 가능한 공간이 구현될 수 있다.Thus, Transfer_Links can connect one or more access points to a building, which in turn can also connect to an outdoor road network. Because it is based on topological relationships, it is possible to link different data sets with different data schemas, making the application more flexible and more realistically representing the actual conditions of the transition space. Therefore, no data format conversion is required for connection between indoor and outdoor networks, regardless of their respective data formats. A space capable of path search can be implemented in the connected indoor and outdoor spatial network data sets through Transfer_Link.
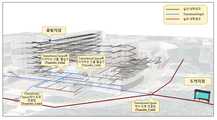
도 7은 본 발명에 의한 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템 및 방법에서 수행되는 최적경로 탐색을 위한 시험 데이터의 예시도로써, 도 7의 시험 데이터는 건물 입구마다 하나씩 두 개의 Transfer_Links를 통해 Transition Graph(파란색)에 연결된 실내 네트워크(검은색)를 보여준다. 그 다음, 교차로에서 두 개의 Transfer_Links를 통해 도로망(빨간색)에 연결된다. Transition Graph에서 같은 위치를 나타내는 노드에 입구를 나타내는 실내 네트워크 노드를 연결하도록 지정한다. 이러한 연결은 임피던스 값이 '0'이며, 이는 에이전트가 동일한 위치에서 한 네트워크에서 다른 네트워크로 점프할 수 있도록 연결 관계를 설정한 것임을 보여준다. 예를 들어, 건물 7층의 출발 지점에 있는 사용자가 외부의 버스 정류장을 향해 이동하려고 할 때, 이 사용자는세 개의 네트워크를 모두 통과해야 건물에서 버스정류장으로 이동할 수 있다. 따라서 경로탐색에 세 네트워크를 사용하는 통합된 방법이 필요하다.7 is an exemplary diagram of test data for optimal path search performed in the connected space-based indoor/outdoor spatial network data linkage system and method for indoor/outdoor navigation according to the present invention. shows the indoor network (black) connected to the Transition Graph (blue). It is then connected to the road network (red) via two Transfer_Links at the intersection. Specifies that the indoor network node representing the entrance is connected to the node representing the same location in the transition graph. This connection has an impedance value of '0', indicating that the agent has established a connection relationship so that it can jump from one network to another at the same location. For example, when a user at the departure point on the 7th floor of a building wants to move toward a bus stop outside, the user must pass through all three networks to get from the building to the bus stop. Therefore, an integrated method using the three networks for route finding is needed.
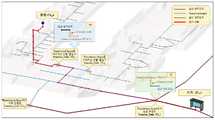
도 8은 3차원 공간에서 연계된 데이터를 이용한 수정된 Dijkstra 최단 경로 검색 기반의 최적 경로 탐색과정을 보여주는 예시도로써, 이 예시에서 경로 최적화가 기반으로 하는 임피던스 값은 거리이므로 출발점 노드와 가장 접근하기 쉬운 건물 입구 사이의 첫 번째 네트워크(즉, 실내 네트워크) 내에서 최단 경로를 계산할 수 있다. 해당 입구에는 도 8의 (a)에 예시된 Transfer_Link가 있으며, 이를 통해 사용자는 실내 네트워크에서 Transitional Space Network로 이동할 수 있다. 해당 노드에서 실외 네트워크로 이어지는 다른 Transfer_Link 위치까지의 최단 경로를 탐색하고, 도 8의 (a) 지점에서 목적지 지점을 향해 길을 찾을 수 있는 실외 네트워크를 향해 이동할 수 있다.8 is an exemplary diagram showing an optimal path search process based on a modified Dijkstra shortest path search using linked data in a three-dimensional space. In this example, the impedance value based on the path optimization is the distance, so We can compute the shortest path within the first network (i.e. the indoor network) between the easy building entrances. At the corresponding entrance, there is a Transfer_Link illustrated in FIG. It is possible to search for the shortest path from the node to another Transfer_Link location leading to the outdoor network, and move toward the outdoor network that can find a way from the point (a) of FIG. 8 to the destination point.
이상의 본 발명에 의하면, 실내 및 실외 공간 사이의 연결공간에 대한 네트워크 데이터를 포함하는 통합된 실내외 공간 네트워크를 모델링할 수 있게 되므로 기존 실내 공간 네트워크 데이터 및 실외 공간 네트워크 데이터의 변환 또는 수정없이 실내외 내비게이션의 경로 결정을 위한 실내 공간 네트워크와 실외 공간 네트워크를 원활하게 연계할 수 있게 되어 실내외 공간 네트워크 데이터의 통합 한계를 극복할 수 있게 한다.According to the present invention, it is possible to model an integrated indoor and outdoor spatial network including network data for a connection space between indoor and outdoor spaces. It is possible to seamlessly link the indoor spatial network and the outdoor spatial network for route determination, thereby overcoming the integration limit of indoor and outdoor spatial network data.
110 : 노드 선택부 120 : 연결공간 정의부
130 : 유형 분류부 131 : 이동그래프 모델링부
132 : 크기 분류부 133 : 최근접노드 탐색부
140 : 실내외 노드 연결부110: node selection unit 120: connection space defining unit
130: type classification unit 131: moving graph modeling unit
132: size classification unit 133: nearest node search unit
140: indoor and outdoor node connection part
Claims (16)
Translated fromKorean상기 노드 선택부(110)에서 선택된 실내 공간 네트워크의 건물 출입구 노드와 실외 공간 네트워크의 출입구 최근접 노드 사이에 존재하는 실내외 노드 연계를 위한 연결공간을 정의하는 연결공간 정의부(120);
상기 연결공간 정의부(120)에서 정의된 연결공간 내의 보행 경로 또는 연결 경로를 탐색하여 연결공간의 유형을 분류하는 유형 분류부(130); 및
상기 노드 선택부(110)에서 선택된 건물 출입구 노드와 출입구 최근접 노드를 상기 유형 분류부(130)에서 분류된 유형별 연결공간을 기반으로 연계시키는 실내외 노드연결부(140):를 포함하여 이루어지는 것을 특징으로 하는 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템.a node selection unit 110 for selecting a building entrance node of the indoor spatial network and selecting a node closest to the entrance of the outdoor spatial network closest to the selected building entrance node;
a connection space definition unit 120 defining a connection space for linking indoor/outdoor nodes existing between the building entrance node of the indoor spatial network selected by the node selection unit 110 and the node closest to the entrance of the outdoor spatial network;
a type classification unit 130 for classifying a type of connection space by searching for a walking path or a connection path within the connection space defined by the connection space definition unit 120; and
Indoor/outdoor node connection unit 140 for linking the building entrance node selected by the node selection unit 110 and the node closest to the entrance door based on the connection space for each type classified by the type classification unit 130: characterized in that it comprises: Connected space-based indoor and outdoor spatial network data connection system for indoor and outdoor navigation.
연결공간 내의 보행 경로 또는 연결 경로를 탐색하여 연결공간 내의 보행 경로 또는 연결 경로의 유/무에 따라 연결공간의 유형을 중간 연계형 또는 직접 연계형으로 분류하고 중간 연계형으로 분류된 연결공간에 대하여 탐색된 보행 경로 또는 연결 경로를 엣지와 노드로 표현되는 이동 그래프로 모델링하는 이동그래프 모델링부(131); 및
상기 모델링된 이동그래프 상의 엣지 수에 따라 중간 연계형 연결공간의 크기를 소형 또는 대형으로 분류하는 크기 분류부(132);를 포함하여 이루어지는 것을 특징으로 하는 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템.According to claim 1, wherein the type classification unit 130,
By searching for a walking path or a connection path in the connection space, the type of connection space is classified into an intermediate connection type or a direct connection type according to the presence/absence of a walking path or a connection path in the connection space, and for the connection space classified as an intermediate connection type a moving graph modeling unit 131 that models the found walking path or connection path as a moving graph expressed by edges and nodes; and
Connection space-based indoor/outdoor spatial network data for indoor/outdoor navigation, characterized in that it comprises; a size classification unit 132 for classifying the size of the intermediate linkage connection space into small or large according to the number of edges on the modeled movement graph. linkage system.
상기 연결공간 내의 보행 경로 또는 연결 경로가 있는 경우 중간 연계형으로 분류하고, 상기 연결공간 내의 보행 경로 또는 연결 경로가 없는 경우 직접 연계형으로 분류하는 것을 특징으로 하는 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템.According to claim 2, wherein the moving graph modeling unit (131),
A connection space-based indoor/outdoor space for indoor/outdoor navigation, characterized in that if there is a walking path or a connection path in the connection space, it is classified as an intermediate connection type, and if there is no walking path or a connection path in the connection space, it is classified as a direct connection type. Network data linkage system.
직접 연계형으로 분류된 연결공간에 대하여 상기 노드 선택부(110)에서 선택된 건물 출입구 노드와 출입구 최근접 노드를 단일의 이동 링크를 이용하여 직접 연계시키는 것을 특징으로 하는 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템.According to claim 2, wherein the indoor/outdoor node connection unit 140,
Connecting space-based indoor/outdoor navigation for indoor/outdoor navigation, characterized in that for a connected space classified as a direct link type, the building entrance node selected by the node selection unit 110 and the node closest to the doorway are directly connected using a single moving link Spatial Network Data Linkage System.
상기 모델링된 이동그래프 상의 엣지가 1개인 경우 소형 중간 연계형 연결공간으로 분류하고, 상기 모델링된 이동그래프 상의 엣지가 복수 개인 경우 대형 중간 연계형 연결공간으로 분류하는 것을 특징으로 하는 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템.According to claim 2, wherein the size classification unit 132,
Connection for indoor/outdoor navigation, characterized in that when there is one edge on the modeled moving graph, it is classified as a small intermediate linkage space, and when there are a plurality of edges on the modeled moving graph, it is classified as a large intermediate linkage space. Space-based indoor and outdoor spatial network data linkage system.
소형으로 분류된 중간 연계형 연결공간에 대하여 이동그래프 상의 엣지 양측 노드를 각각의 이동 링크를 이용하여 실내 공간 네트워크의 건물 출입구 노드 및 실외 공간 네트워크의 출입구 최근접 노드와 각각 연계시키는 것을 특징으로 하는 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템.According to claim 2, wherein the indoor/outdoor node connection unit 140,
Indoor/outdoor, characterized in that for the small-sized intermediate linkage type connection space, the nodes on both sides of the edge on the moving graph are respectively linked with the building entrance node of the indoor spatial network and the node closest to the entrance of the outdoor spatial network using each moving link. Connected space-based indoor/outdoor spatial network data connection system for navigation.
대형으로 분류된 중간 연계형 연결공간에 대하여 실내 공간 네트워크의 건물 출입구 노드와 가장 가까운 이동그래프 상의 실내측 최근접노드 및 실외 공간 네트워크의 출입구 최근접 노드와 가장 가까운 이동그래프 상의 실외측 최근접노드를 각각 탐색하는 최근접노드 탐색부(133);를 더 포함하여 구성되는 것을 특징으로 하는 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템.According to claim 2, wherein the type classification unit 130,
For the medium-linked connected space classified as large, the indoor closest node on the moving graph closest to the building entrance node of the indoor spatial network and the outdoor closest node on the moving graph closest to the closest node to the doorway closest node of the outdoor spatial network are selected. A connected space-based indoor/outdoor spatial network data linkage system for indoor/outdoor navigation, characterized in that it further comprises a nearest node search unit 133 to search for each.
대형으로 분류된 중간 연계형 연결공간에 대하여 상기 탐색된 이동그래프 상의 실내측 최근접노드와 이동그래프 상의 실외측 최근접노드를 각각의 이동 링크를 이용하여 실내 공간 네트워크의 건물 출입구 노드 및 실외 공간 네트워크의 출입구 최근접 노드와 각각 연계시키는 것을 특징으로 하는 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계시스템.The method of claim 7, wherein the indoor/outdoor node connection unit 140,
For the medium-linked connection space classified as large, the indoor nearest node on the movement graph and the outdoor closest node on the movement graph are respectively moved to a building entrance node and an outdoor space network of the indoor space network using each movement link. A connection space-based indoor/outdoor spatial network data linkage system for indoor/outdoor navigation, characterized in that it is linked with the node closest to the doorway of the
(b) 상기 선택된 실내 공간 네트워크의 건물 출입구 노드와 실외 공간 네트워크의 출입구 최근접 노드 사이에 존재하는 실내외 노드 연계를 위한 연결공간을 정의하는 연결공간 정의단계;
(c) 상기 정의된 연결공간 내의 보행 경로 또는 연결 경로를 탐색하여 연결공간의 유형을 분류하는 유형 분류단계; 및
(d) 상기 노드 선택단계(a)에서 선택된 건물 출입구 노드와 출입구 최근접 노드를 상기 유형 분류단계(c)에서 분류된 유형별 연결공간을 기반으로 연계시키는 실내외 노드연결단계;를 포함하여 이루어지는 것을 특징으로 하는 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계방법.(a) a node selection step of selecting a building entrance node of the indoor spatial network and selecting a node closest to the entrance of the outdoor spatial network closest to the selected building entrance node;
(b) a connection space definition step of defining a connection space for linking indoor/outdoor nodes existing between a building entrance node of the selected indoor spatial network and a node closest to the entrance of the outdoor spatial network;
(c) a type classification step of classifying a type of a connection space by searching a walking path or a connection path within the defined connection space; and
(d) an indoor/outdoor node connection step of linking the building entrance node selected in the node selection step (a) and the node closest to the doorway based on the connection space for each type classified in the type classification step (c); A connection space-based indoor and outdoor spatial network data connection method for indoor and outdoor navigation using
연결공간 내의 보행 경로 또는 연결 경로를 탐색하여 연결공간 내의 보행 경로 또는 연결 경로의 유/무에 따라 연결공간의 유형을 중간 연계형 또는 직접 연계형으로 분류하고 중간 연계형으로 분류된 연결공간에 대하여 탐색된 보행 경로 또는 연결 경로를 엣지와 노드로 표현되는 이동 그래프로 모델링하는 이동그래프 모델링 단계(c1); 및
상기 모델링된 이동그래프 상의 엣지 수에 따라 중간 연계형 연결공간의 크기를 소형 또는 대형으로 분류하는 크기 분류단계(c2);를 포함하여 이루어지는 것을 특징으로 하는 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계방법.The method of claim 9, wherein the type classification step (c) comprises:
By searching for a walking path or a connection path in the connection space, the type of connection space is classified into an intermediate connection type or a direct connection type according to the presence/absence of a walking path or a connection path in the connection space, and for the connection space classified as an intermediate connection type a moving graph modeling step (c1) of modeling the found walking path or connection path as a moving graph expressed by edges and nodes; and
Connection space-based indoor/outdoor spatial network data for indoor/outdoor navigation, comprising: a size classification step (c2) of classifying the size of the intermediate linkage connection space into small or large according to the number of edges on the modeled movement graph linkage method.
상기 연결공간 내의 보행 경로 또는 연결 경로가 있는 경우 중간 연계형으로 분류하고, 상기 연결공간 내의 보행 경로 또는 연결 경로가 없는 경우 직접 연계형으로 분류하는 것을 특징으로 하는 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계방법.11. The method of claim 10, wherein the moving graph modeling step (c1),
A connection space-based indoor/outdoor space for indoor/outdoor navigation, characterized in that if there is a walking path or a connection path in the connection space, it is classified as an intermediate connection type, and if there is no walking path or a connection path in the connection space, it is classified as a direct connection type. Network data connection method.
직접 연계형으로 분류된 연결공간에 대하여 상기 노드 선택단계(a)에서 선택된 건물 출입구 노드와 출입구 최근접 노드를 단일의 이동 링크를 이용하여 직접 연계시키는 것을 특징으로 하는 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계방법.11. The method of claim 10, wherein the step (d) of connecting the indoor/outdoor nodes,
Connecting space-based indoor/outdoor navigation for indoor/outdoor navigation, characterized in that for a connected space classified as a direct link type, the building entrance node selected in the node selection step (a) and the node closest to the doorway are directly linked using a single moving link Spatial network data linkage method.
상기 모델링된 이동그래프 상의 엣지가 1개인 경우 소형 중간 연계형 연결공간으로 분류하고, 상기 모델링된 이동그래프 상의 엣지가 복수 개인 경우 대형 중간 연계형 연결공간으로 분류하는 것을 특징으로 하는 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계방법.11. The method of claim 10, wherein the size classification step (c2),
Connection for indoor/outdoor navigation, characterized in that when there is one edge on the modeled moving graph, it is classified as a small intermediate linkage space, and when there are a plurality of edges on the modeled moving graph, it is classified as a large intermediate linkage space. A spatial-based indoor/outdoor spatial network data connection method.
소형으로 분류된 중간 연계형 연결공간에 대하여 이동그래프 상의 엣지 양측 노드를 각각의 이동 링크를 이용하여 실내 공간 네트워크의 건물 출입구 노드 및 실외 공간 네트워크의 출입구 최근접 노드와 각각 연계시키는 것을 특징으로 하는 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계방법.11. The method of claim 10, wherein the step (d) of connecting the indoor/outdoor nodes,
Indoor/outdoor, characterized in that for the small-sized intermediate linkage type connection space, the nodes on both sides of the edge on the moving graph are respectively linked with the building entrance node of the indoor spatial network and the node closest to the entrance of the outdoor spatial network using each moving link. A method for linking indoor/outdoor spatial network data based on a connected space for navigation.
(c3) 대형으로 분류된 중간 연계형 연결공간에 대하여 실내 공간 네트워크의 건물 출입구 노드와 가장 가까운 이동그래프 상의 실내측 최근접 노드 및 실외 공간 네트워크의 출입구 최근접 노드와 가장 가까운 이동그래프 상의 실외측 최근접 노드를 각각 탐색하는 최근접노드 탐색단계;를 더 포함하여 구성되는 것을 특징으로 하는 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계방법.The method of claim 10, wherein the classification step (c) comprises:
(c3) For a medium-linked connected space classified as large, the indoor closest node on the movement graph closest to the building entrance node of the indoor spatial network and the outdoor most recent node on the movement graph closest to the closest node to the doorway closest node of the outdoor spatial network A connection space-based indoor/outdoor spatial network data connection method for indoor/outdoor navigation, characterized in that it further comprises a nearest node search step of searching for adjacent nodes, respectively.
대형으로 분류된 중간 연계형 연결공간에 대하여 상기 탐색된 이동그래프 상의 실내측 최근접 노드와 이동그래프 상의 실외측 최근접 노드를 각각의 이동 링크를 이용하여 실내 공간 네트워크의 건물 출입구 노드 및 실외 공간 네트워크의 출입구 최근접 노드와 각각 연계시키는 것을 특징으로 하는 실내외 내비게이션을 위한 연결공간 기반 실내외 공간 네트워크 데이터 연계방법.The method of claim 15, wherein the step (d) of connecting the indoor/outdoor nodes comprises:
For the medium-linked connection space classified as large, the indoor-side nearest node on the movement graph and the outdoor-side closest node on the movement graph are respectively moved to a building entrance node and an outdoor space network of the indoor space network using each movement link. A connection space-based indoor/outdoor spatial network data connection method for indoor/outdoor navigation, characterized in that each is linked with the node closest to the doorway of the.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020210180329AKR102389271B1 (en) | 2021-12-16 | 2021-12-16 | Connecting system and method for indoor/outdoor spatial network data based on transitional space for indoor/outdoor navigation |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020210180329AKR102389271B1 (en) | 2021-12-16 | 2021-12-16 | Connecting system and method for indoor/outdoor spatial network data based on transitional space for indoor/outdoor navigation |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR102389271B1true KR102389271B1 (en) | 2022-04-20 |
Family
ID=81395812
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020210180329AActiveKR102389271B1 (en) | 2021-12-16 | 2021-12-16 | Connecting system and method for indoor/outdoor spatial network data based on transitional space for indoor/outdoor navigation |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102389271B1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230171161A (en)* | 2022-06-13 | 2023-12-20 | 경북대학교 산학협력단 | Method of spatioal proximity grapgh generation using architectural drawings and system there of |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20090022816A (en)* | 2007-08-31 | 2009-03-04 | 한양대학교 산학협력단 | Method and apparatus for generating 3D geographic information about building interior space |
| KR20110083773A (en) | 2010-01-15 | 2011-07-21 | 최진원 | Indoor and outdoor integrated spatial information system and its provision method |
| KR20120140401A (en)* | 2011-06-21 | 2012-12-31 | 팅크웨어(주) | Method, electronic device and recorded medium for navigation |
| KR20130066353A (en) | 2011-12-12 | 2013-06-20 | 현대엠엔소프트 주식회사 | Method and system for link between in-door path and out-door path |
| KR20150050965A (en)* | 2013-11-01 | 2015-05-11 | 현대엠엔소프트 주식회사 | Method for map matching of user terminal |
- 2021
- 2021-12-16KRKR1020210180329Apatent/KR102389271B1/enactiveActive
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20090022816A (en)* | 2007-08-31 | 2009-03-04 | 한양대학교 산학협력단 | Method and apparatus for generating 3D geographic information about building interior space |
| KR20110083773A (en) | 2010-01-15 | 2011-07-21 | 최진원 | Indoor and outdoor integrated spatial information system and its provision method |
| KR20120140401A (en)* | 2011-06-21 | 2012-12-31 | 팅크웨어(주) | Method, electronic device and recorded medium for navigation |
| KR20130066353A (en) | 2011-12-12 | 2013-06-20 | 현대엠엔소프트 주식회사 | Method and system for link between in-door path and out-door path |
| KR20150050965A (en)* | 2013-11-01 | 2015-05-11 | 현대엠엔소프트 주식회사 | Method for map matching of user terminal |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20230171161A (en)* | 2022-06-13 | 2023-12-20 | 경북대학교 산학협력단 | Method of spatioal proximity grapgh generation using architectural drawings and system there of |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Liu et al. | Contextual fuzzy cognitive map for decision support in geographic information systems | |
| Gharaee et al. | Graph representation learning for road type classification | |
| JP3793032B2 (en) | Road guide method and apparatus | |
| CN110515986B (en) | Processing method and device of social network diagram and storage medium | |
| EP4160152B1 (en) | Lane search for self-driving vehicles | |
| CN101840202B (en) | Functional block intelligent wiring method in modeling of control system | |
| Foerster et al. | Towards a formal classification of generalization operators | |
| CN115827908A (en) | System and method for interactive image scene graph pattern search and analysis | |
| CN112797995B (en) | Vehicle emergency navigation method with situational information of spatio-temporal characteristics | |
| CN114462357A (en) | Entity linking method, construction method, device and storage medium | |
| Dawes et al. | Precise locations in space: An alternative approach to space syntax analysis using intersection points | |
| KR102389271B1 (en) | Connecting system and method for indoor/outdoor spatial network data based on transitional space for indoor/outdoor navigation | |
| CN113793500B (en) | Method and system for constructing computable road network of urban traffic road | |
| Ko et al. | Unidirectional AGV guidepath network design: a heuristic algorithm | |
| Touya et al. | Modelling geographic relationships in automated environments | |
| van Smaalen | Automated aggregation of geographic objects: a new approach to the conceptual generalisation of geographic databases | |
| CN120297385A (en) | Mathematics teaching knowledge graph generation method and system based on artificial intelligence | |
| Hudson-Smith et al. | More than one twin: An ecology of model applications in East London | |
| CN118521340A (en) | Traffic demand analysis method and equipment based on multi-mode public transportation | |
| WO2021176677A1 (en) | Management device, management method, and management program | |
| US20230099772A1 (en) | Lane search for self-driving vehicles | |
| KR102503797B1 (en) | CNN and AR-based Spatial attribute detection method using smartphone camera and device thereof | |
| CN115131455A (en) | Map generation method and related product | |
| CN117131963A (en) | Task processing method, neural network, training method, training device and training medium thereof | |
| KR20230063199A (en) | Turn-based optimal path search method and system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application | Patent event code:PA01091R01D Comment text:Patent Application Patent event date:20211216 | |
| PA0201 | Request for examination | ||
| PA0302 | Request for accelerated examination | Patent event date:20211216 Patent event code:PA03022R01D Comment text:Request for Accelerated Examination | |
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration | Patent event code:PE07011S01D Comment text:Decision to Grant Registration Patent event date:20220328 | |
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment | Comment text:Registration of Establishment Patent event date:20220418 Patent event code:PR07011E01D | |
| PR1002 | Payment of registration fee | Payment date:20220418 End annual number:3 Start annual number:1 | |
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee | Payment date:20250317 Start annual number:4 End annual number:4 |