KR102357307B1 - Capsule endoscopic ultrasonography system for acquiring 3D images - Google Patents
Capsule endoscopic ultrasonography system for acquiring 3D imagesDownload PDFInfo
- Publication number
- KR102357307B1 KR102357307B1KR1020200004389AKR20200004389AKR102357307B1KR 102357307 B1KR102357307 B1KR 102357307B1KR 1020200004389 AKR1020200004389 AKR 1020200004389AKR 20200004389 AKR20200004389 AKR 20200004389AKR 102357307 B1KR102357307 B1KR 102357307B1
- Authority
- KR
- South Korea
- Prior art keywords
- capsule
- capsule endoscope
- ultrasound image
- ultrasound
- element array
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000002775capsuleSubstances0.000titleclaimsabstractdescription136
- 238000012336endoscopic ultrasonographyMethods0.000titledescription3
- 238000002604ultrasonographyMethods0.000claimsabstractdescription116
- 210000000056organAnatomy0.000claimsabstractdescription34
- 238000004891communicationMethods0.000claimsabstractdescription11
- 210000000214mouthAnatomy0.000claimsabstractdescription4
- 238000000034methodMethods0.000claimsdescription14
- 238000001839endoscopyMethods0.000claimsdescription6
- 230000008569processEffects0.000claimsdescription5
- 238000012545processingMethods0.000claimsdescription3
- 210000001835visceraAnatomy0.000claims1
- 238000010586diagramMethods0.000description5
- 238000013507mappingMethods0.000description5
- 230000008901benefitEffects0.000description3
- 238000003384imaging methodMethods0.000description3
- 230000003187abdominal effectEffects0.000description2
- 238000002591computed tomographyMethods0.000description2
- 238000009558endoscopic ultrasoundMethods0.000description2
- 210000001035gastrointestinal tractAnatomy0.000description2
- 238000012986modificationMethods0.000description2
- 230000004048modificationEffects0.000description2
- 230000004044responseEffects0.000description2
- 230000000638stimulationEffects0.000description2
- 241000167880HirundinidaeSpecies0.000description1
- 206010061902Pancreatic neoplasmDiseases0.000description1
- 210000001015abdomenAnatomy0.000description1
- 230000005856abnormalityEffects0.000description1
- 238000003491arrayMethods0.000description1
- 238000003745diagnosisMethods0.000description1
- 201000010099diseaseDiseases0.000description1
- 208000037265diseases, disorders, signs and symptomsDiseases0.000description1
- 238000005516engineering processMethods0.000description1
- 230000002496gastric effectEffects0.000description1
- 239000011159matrix materialSubstances0.000description1
- 230000003287optical effectEffects0.000description1
- 201000002528pancreatic cancerDiseases0.000description1
- 230000004043responsivenessEffects0.000description1
- 230000035945sensitivityEffects0.000description1
- 210000000813small intestineAnatomy0.000description1
- 238000003325tomographyMethods0.000description1
- 230000009466transformationEffects0.000description1
- 238000000844transformationMethods0.000description1
Images





Classifications
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/48—Diagnostic techniques
- A61B8/483—Diagnostic techniques involving the acquisition of a 3D volume of data
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/12—Diagnosis using ultrasonic, sonic or infrasonic waves in body cavities or body tracts, e.g. by using catheters
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4444—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device related to the probe
- A61B8/4472—Wireless probes
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/46—Ultrasonic, sonic or infrasonic diagnostic devices with special arrangements for interfacing with the operator or the patient
- A61B8/461—Displaying means of special interest
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/54—Control of the diagnostic device
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/56—Details of data transmission or power supply
- A61B8/565—Details of data transmission or power supply involving data transmission via a network
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/16—Details of sensor housings or probes; Details of structural supports for sensors
- A61B2562/162—Capsule shaped sensor housings, e.g. for swallowing or implantation
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Surgery (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Biophysics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Physics & Mathematics (AREA)
- Molecular Biology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Computer Networks & Wireless Communication (AREA)
- Ultra Sonic Daignosis Equipment (AREA)
- Endoscopes (AREA)
Abstract
Translated fromKoreanDescription
Translated fromKorean본 발명은 초음파 영상을 획득하기 위한 캡슐 내시경 시스템에 관한 것으로서, 보다 구체적으로는 3D 초음파 영상을 획득할 수 있는 캡슐 내시경과 그 제어기를 포함하는 캡슐 내시경 시스템에 관한 것이다.The present invention relates to a capsule endoscope system for acquiring an ultrasound image, and more particularly, to a capsule endoscope system including a capsule endoscope capable of acquiring a 3D ultrasound image and a controller thereof.
근래에는 캡슐 타입의 내시경이 개발되어 의료 현장에서 여러 가지 질병을 진단하기 위해 사용되고 있다. 캡슐 내시경이란, 사람이 알약 크기의 내시경을 삼키면 캡슐 형태의 내시경이 신체 내부를 촬영하여 무선통신을 통해 외부 수신기에 전송하는 방식으로서, 마취가 필요하지 않고 구토 감이 없으며, 기존의 내시경으로는 촬영할 수 없었던 소장 부분까지 정밀하게 진단할 수 있다는 장점을 가진다.Recently, capsule-type endoscopes have been developed and used to diagnose various diseases in the medical field. Capsule endoscopy is a method in which when a person swallows a pill-sized endoscope, the capsule-type endoscope captures the inside of the body and transmits it to an external receiver through wireless communication. It has the advantage of being able to accurately diagnose parts of the small intestine that were not possible.
이러한 캡슐 내시경은 광학 이미지 센서를 통해 인체 내부의 대상부위에 대한 가시광 이미지를 획득하게 되며, 획득된 가시광 이미지를 수신기의 스크린에 실시간으로 디스플레이시켜 신체 내부의 이상 여부를 관찰하게 된다.The capsule endoscope acquires a visible light image of a target part inside the human body through an optical image sensor, and displays the acquired visible light image on the screen of the receiver in real time to observe whether there is an abnormality inside the body.
한편, 신체 내부의 영상 진단은 소화기 내시경, 복부 초음파 및 전산화 단층 촬영 등의 도입으로 눈부신 발전을 이루었으나, 이와 같은 검사법으로도 소화관 벽이나 인접 장기의 관찰에는 한계가 있었다. 이런 한계를 극복하고자 소화관 체강 내에서 벽 구조나 인접 장기를 관찰하려는 시도를 하게 되었고, 이에 따라 내시경 초음파(endoscopic ultrasonography, EUS) 검사가 개발되었다.On the other hand, intra-body imaging has made remarkable progress with the introduction of gastrointestinal endoscopy, abdominal ultrasound, and computed tomography. In order to overcome this limitation, an attempt was made to observe the wall structure or adjacent organs in the body cavity of the digestive tract, and accordingly, endoscopic ultrasonography (EUS) examination was developed.
내시경 초음파란 내시경 선단에 초음파 진동자를 부착시켜 내시경과 초음파 검사를 결합시킨 화상 진단법으로서, 처음에는 일반적인 복부 초음파 검사나 전산화 단층 촬영으로 발견하기 어려운 췌장의 작은 종양을 진단하기 위해 고안되었다. 다만, 내시경 초음파는 통상적인 내시경 장치에 비해 큰 직경을 가지고 있어 환자의 이질감이 크다는 문제점이 있었으며, 출원인은 캡슐 형태의 초음파 내시경을 고안하여 이질감이나 구토 감 없이 소화기 내부의 초음파 영상을 획득할 수 있는 기반을 만들었으며 이에 대한 기술 개발을 지속하고 있다.Endoscopic ultrasound is an imaging method that combines an endoscope and an ultrasound examination by attaching an ultrasound vibrator to the tip of the endoscope, and was initially designed to diagnose small pancreatic tumors that are difficult to detect with general abdominal ultrasound or computed tomography. However, endoscopic ultrasound has a large diameter compared to conventional endoscopy devices, so there is a problem that the patient has a large sense of heterogeneity. We have created a foundation and continue to develop technology for it.
본 발명은 기존의 복부 초음파 장치와 같이 3D 초음파 영상을 획득할 수 있는 캡슐 형태의 초음파 내시경을 제공하는데 그 목적이 있다.An object of the present invention is to provide an ultrasound endoscope in the form of a capsule capable of acquiring a 3D ultrasound image like a conventional ultrasound apparatus for the abdomen.
본 발명은 3D 초음파 영상 획득을 위한 캡슐 내시경 시스템에 관한 것으로서, 구강을 통해 장기 내부로 투입되는 캡슐 사이즈를 가지고, 외부에서 작용하는 제어 자력에 의해 위치와 자세가 제어되며, 적어도 1×N개의 초음파 엘리먼트 어레이를 구비하고, 상기 초음파 엘리먼트 어레이에 의해 획득되는 장기 내부로부터의 초음파 영상을 무선 또는 유선 통신의 방식으로 외부로 송출하는 캡슐 내시경;과, 인체 외부에 위치하며, 상기 캡슐 내시경의 위치와 자세를 제어하는 상기 제어 자력을 발생하는 외부 제어기; 및 상기 캡슐 내시경으로부터 송출되는 초음파 영상을 수신하고, 이 초음파 영상을 시각적으로 표시하는 디스플레이 장치를 포함하는 수신 장치;를 포함한다.The present invention relates to a capsule endoscopy system for obtaining 3D ultrasound images, having a capsule size that is introduced into an organ through the oral cavity, the position and posture are controlled by a control magnetic force acting from the outside, and at least 1×N ultrasound A capsule endoscope having an element array and transmitting an ultrasound image from the inside of an organ obtained by the ultrasound element array to the outside through wireless or wired communication; and, located outside the human body, the position and posture of the capsule endoscope an external controller for generating the control magnetic force to control the ; and a receiving device including a display device that receives the ultrasound image transmitted from the capsule endoscope and visually displays the ultrasound image.
여기서, 상기 캡슐 내시경은 상기 제어 자력에 대해 작용하는 캡슐 마그넷을 구비하고, 상기 캡슐 마그넷은 제1 캡슐 마그넷 및 제2 캡슐 마그넷을 포함하며, 상기 제1 및 제2 캡슐 마그넷 사이에 상기 초음파 엘리먼트 어레이가 배치된다.Here, the capsule endoscope includes a capsule magnet acting against the control magnetic force, the capsule magnet includes a first capsule magnet and a second capsule magnet, and the ultrasonic element array is disposed between the first and second capsule magnets. is placed
그리고, 상기 제1 및 제2 캡슐 마그넷은 서로 다른 자극이 상기 캡슐 내시경의 장변 측을 바라보도록 배치될 수 있다.In addition, the first and second capsule magnets may be arranged so that different stimuli face the long side of the capsule endoscope.
이에 따라, 상기 외부 제어기는, 상기 캡슐 내시경의 제1 및 제2 캡슐 마그넷의 서로 다른 자극에 대응하는 자극이 상기 제1 및 제2 캡슐 마그넷을 마주보도록 배치되는 외부 마그넷을 구비한다.Accordingly, the external controller includes an external magnet in which the stimuli corresponding to the different stimuli of the first and second capsule magnets of the capsule endoscope are disposed to face the first and second capsule magnets.
그리고, 상기 외부 제어기는 상기 캡슐 내시경의 초음파 엘리먼트 어레이에서 송출되는 초음파의 진로를 가로지르는 방향으로 이동함으로써, 상기 수신 장치에서 3D 초음파 영상을 수신한다.And, the external controller receives the 3D ultrasound image from the receiving device by moving in a direction transverse to the path of the ultrasound transmitted from the ultrasound element array of the capsule endoscope.
그리고, 상기 초음파 엘리먼트 어레이는 M×N개로 배열된 초음파 엘리먼트 어레이일 수 있다.Also, the ultrasound element array may be an M×N ultrasound element array.
그리고, 상기 캡슐 내시경은 측위 신호를 방출하는 비컨을 포함하고, 상기 수신 장치는 상기 비컨에서 방출되는 측위 신호를 수신하는 적어도 3개 이상의 비컨 수신기를 포함할 수 있다.In addition, the capsule endoscope may include a beacon for emitting a positioning signal, and the receiving device may include at least three or more beacon receivers for receiving the positioning signal emitted from the beacon.
또한, 상기 수신 장치는, 상기 비컨 수신기에 의해 결정된 상기 캡슐 내시경의 3차원 위치 정보를 상기 캡슐 내시경으로부터 수신된 대응하는 초음파 영상과 함께 저장하고 처리할 수 있다.In addition, the receiving device may store and process the 3D position information of the capsule endoscope determined by the beacon receiver together with the corresponding ultrasound image received from the capsule endoscope.
그리고, 상기 외부 제어기는 상기 캡슐 내시경의 초음파 엘리먼트 어레이에서 송출되는 초음파의 진로를 가로지르는 방향을 따라 360°로 이동하여 상기 장기 내부의 360° 3D 초음파 영상을 획득할 수 있다.In addition, the external controller may move 360° along a direction transverse to the path of the ultrasound transmitted from the ultrasound element array of the capsule endoscope to obtain a 360° 3D ultrasound image of the inside of the organ.
그리고, 상기 수신 장치는 상기 360° 3D 초음파 영상을 상기 캡슐 내시경의 3차원 위치 정보에 기반하여 매핑함으로써, 장기 내부로부터의 초음파 영상을 3차원 영상으로 처리할 수 있다.In addition, the receiving device may process the ultrasound image from the inside of the organ as a 3D image by mapping the 360° 3D ultrasound image based on the 3D position information of the capsule endoscope.
상기와 같은 구성을 가진 본 발명의 3D 초음파 영상 획득을 위한 캡슐 내시경 시스템은, 외부 제어기의 운동을 제어하여 2D 초음파 영상을 3차원적으로 중첩함에 따라 장기 내부에서의 3차원 초음파 영상을 획득할 수 있도록 한다.The capsule endoscope system for obtaining a 3D ultrasound image of the present invention having the above configuration can acquire a 3D ultrasound image inside an organ by controlling the movement of an external controller to overlap the 2D ultrasound image in 3D. let it be
또한, 본 발명은 초음파 영상과 함께 캡슐 내시경의 3차원 위치 정보를 함께 획득함으로써 해당 장기 전체의 전방향에 대한 3차원 초음파 영상을 획득하고, 이를 장기 전체에 대해 매핑함으로써 장기 형태 그대로의 3차원 초음파 영상을 획득하는 것이 가능해진다.In addition, the present invention obtains a three-dimensional ultrasound image of the entire organ in the omnidirectional direction by acquiring the three-dimensional position information of the capsule endoscope together with the ultrasound image, and mapping the three-dimensional ultrasound image of the entire organ as it is in the shape of the organ. It becomes possible to acquire an image.
도 1은 본 발명의 3D 초음파 영상 획득을 위한 캡슐 내시경 시스템에 대한 전체적인 구성을 도시한 도면.
도 2는 본 발명에 포함되는 캡슐 내시경의 일 실시형태를 도시한 도면.
도 3은 도 2의 캡슐 내시경에 대한 기본 구조를 도시한 도면.
도 4는 본 발명에 포함되는 외부 제어기의 일 실시형태를 도시한 도면.
도 5는 1×N개의 초음파 엘리먼트 어레이를 이용하여 3D 초음파 영상을 획득하는 원리를 도시한 도면.
도 6은 캡슐 내시경의 측위 정보를 포함하는 3D 초음파 영상을 획득하기 위한 본 발명의 일 실시형태를 도시한 도면.
도 7은 장기 내부로부터의 초음파 영상을 3차원 영상으로 매핑한 일례를 도시한 도면.1 is a view showing the overall configuration of a capsule endoscope system for obtaining a 3D ultrasound image of the present invention.
2 is a view showing an embodiment of a capsule endoscope included in the present invention.
3 is a view showing the basic structure of the capsule endoscope of FIG.
4 is a view showing an embodiment of an external controller included in the present invention.
5 is a diagram illustrating a principle of acquiring a 3D ultrasound image using an array of 1×N ultrasound elements.
6 is a diagram illustrating an embodiment of the present invention for acquiring a 3D ultrasound image including positioning information of a capsule endoscope.
7 is a diagram illustrating an example of mapping an ultrasound image from the inside of an organ into a 3D image;
본 발명은 다양한 변환을 가할 수 있고 여러 가지 실시예를 가질 수 있는 바, 특정 실시예를 예시하고 상세한 설명에 상세하게 설명하고자 한다. 그러나, 이는 본 발명을 특정한 실시 형태에 대해 한정하려는 것이 아니며, 본 발명의 사상 및 기술 범위에 포함되는 모든 변환, 균등물 내지 대체물을 포함하는 것으로 이해되어야 한다.Since the present invention can apply various transformations and can have various embodiments, specific embodiments are illustrated and described in detail in the detailed description. However, this is not intended to limit the present invention to specific embodiments, and should be understood to include all modifications, equivalents, and substitutes included in the spirit and scope of the present invention.
본 발명에서 사용한 용어는 단지 특정한 실시예를 설명하기 위해 사용된 것으로, 본 발명을 한정하려는 의도가 아니다. 단수의 표현은 문맥상 명백하게 다르게 뜻하지 않는 한, 복수의 표현을 포함한다. 본 발명에서, '포함하다' 또는 '가지다' 등의 용어는 명세서상에 기재된 특징, 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것이 존재함을 지정하려는 것이지, 하나 또는 그 이상의 다른 특징들이나 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것들의 존재 또는 부가 가능성을 미리 배제하지 않는 것으로 이해되어야 한다.The terms used in the present invention are only used to describe specific embodiments, and are not intended to limit the present invention. The singular expression includes the plural expression unless the context clearly dictates otherwise. In the present invention, terms such as 'comprising' or 'having' are intended to designate that the features, numbers, steps, operations, components, parts, or combinations thereof described in the specification exist, and one or more other features It should be understood that this does not preclude the existence or addition of numbers, steps, operations, components, parts, or combinations thereof.
이하, 첨부된 도면을 참조하여 본 발명의 바람직한 실시예들을 상세히 설명한다. 이때, 첨부된 도면에서 동일한 구성 요소는 가능한 동일한 부호로 나타내고 있음에 유의한다. 또한, 본 발명의 요지를 흐리게 할 수 있는 공지 기능 및 구성에 대한 상세한 설명은 생략할 것이다. 마찬가지 이유로 첨부 도면에 있어서 일부 구성요소는 과장되거나 생략되거나 개략적으로 도시되었다.Hereinafter, preferred embodiments of the present invention will be described in detail with reference to the accompanying drawings. In this case, it should be noted that in the accompanying drawings, the same components are denoted by the same reference numerals as much as possible. In addition, detailed descriptions of well-known functions and configurations that may obscure the gist of the present invention will be omitted. For the same reason, some components are exaggerated, omitted, or schematically illustrated in the accompanying drawings.
도 1은 본 발명의 3D 초음파 영상 획득을 위한 캡슐 내시경 시스템(10)에 대한 전체적인 구성을 도시한 도면이다. 첨부된 도면을 참조하여 본 발명에 대해 상세히 설명한다.1 is a view showing the overall configuration of a
도 1에 도시된 바와 같이, 본 발명의 3D 초음파 영상 획득을 위한 캡슐 내시경 시스템(10)(이하, 간략히 "캡슐 내시경 시스템"이라 함)은 캡슐 내시경(100)과 외부 제어기(200), 그리고 수신 장치(300)를 포함한다.1, the capsule endoscope system 10 (hereinafter, simply referred to as "capsule endoscope system") for obtaining a 3D ultrasound image of the present invention includes a
캡슐 내시경(100)은 구강을 통해 장기 내부로 투입되는 캡슐 사이즈를 가진 독립형의 초음파 내시경이다. 여기서, 독립형이라 함은 튜브 등을 통해 유선으로 연결되지 않다는 것을 의미한다.The
캡슐 내시경(100)은 외부에서 작용하는 제어 자력에 의해 위치와 자세가 제어되며, 적어도 1×N개의 초음파 엘리먼트 어레이(110)를 구비한다. 즉, 외부의 제어 자력에 의해 피동적으로 캡슐 내시경(100)의 위치와 자세가 제어되며, 이는 곧 외부의 제어 자력에 의해 장기 내로 투입된 캡슐 내시경(100)이 이동하는 것은 물론 장기 내의 특정 위치에 머물거나 원하는 자세, 각도를 취할 수 있음을 의미한다.The
또한, 본 발명에서 초음파 엘리먼트 어레이(110)는 정해진 방향으로만 초음파를 방출할 수 있을 뿐 그 자체가 회전하는 등의 기계적 운동을 하지 않으며, 외부의 제어 자력에 의해 캡슐 내시경(100)이 움직이는 변화가 발생함에 따라 3D 초음파 영상을 획득할 수 있게 되는데, 이에 대해서는 해당 단락에서 도 5를 참조하여 상세히 설명한다.In addition, in the present invention, the
그리고, 캡슐 내시경(100)에는 송수신부(130)가 구비되어, 외부로부터 수신되는 제어 신호(예를 들어, 초음파 엘리먼트 어레이의 출력 제어 등)를 수신하는 한편, 초음파 엘리먼트 어레이(110)에 의해 획득되는 장기 내부로부터의 초음파 영상을 무선 또는 유선 통신의 방식으로 외부로 송출한다.In addition, the
외부 제어기(200)는 인체 외부에 위치하며, 캡슐 내시경(100)의 위치와 자세를 제어하는 제어 자력을 발생한다. 즉, 캡슐 내시경(100)의 위치와 이동, 자세를 제어하는 것에 수반하여 초음파 엘리먼트 어레이(110)에서 방출하는 초음파의 방향을 바꾸는 외부의 제어 자력을 발생하는 장치가 외부 제어기(200)이다. 캡슐 내시경(100)은 장기 내부에 위치하고, 외부 제어기(200)는 인체 외부에 위치하며, 상호 간에 작용하는 자력에 의해 원격으로 캡슐 내시경(100)의 움직임이 제어된다.The
실시형태에 따라서, 외부 제어기(200)는 소형의 핸드헬드 타입으로 만들어질 수 있으며, 환자의 피부에 밀착하거나 근접하게 배치한 후 의료인이 수동으로 세밀히 조작하거나 또는 다관절 로봇 암 말단에 장착하여 자동화된 프로그램으로 조작될 수도 있다.Depending on the embodiment, the
수신 장치(300)는 캡슐 내시경(100)으로부터 송출되는 초음파 영상을 수신하고, 이 초음파 영상을 시각적으로 표시하는 디스플레이 장치(310)를 포함한다. 예를 들어, 수신 장치(300)는 유무선 통신 수단을 구비한 컴퓨팅 장치일 수 있다. 수신된 초음파 영상은 수신 장치(300)에 구비된 연산 수단에 의해 처리된 후 디스플레이 장치(310)에서 시각화될 수 있다.The
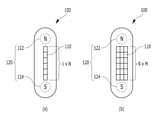
도 2는 본 발명의 캡슐 내시경 시스템(10)에 포함되는 캡슐 내시경(100)의 일 실시형태를 도시한 도면이고, 도 3은 도 2의 캡슐 내시경(100)에 대한 기본 구조를 도시한 도면이다.2 is a view showing an embodiment of a
도 2 및 도 3에 도시된 바와 같이, 캡슐 내시경(100)은 외부의 제어 자력에 작용하는 캡슐 마그넷(120)을 구비하는데, 특히 캡슐 마그넷(120)은 제1 캡슐 마그넷(122) 및 제2 캡슐 마그넷(124)을 포함할 수 있다. 그리고, 제1 및 제2 캡슐 마그넷(122, 124) 사이에 초음파 엘리먼트 어레이(110)가 배치되는데, 이는 외부의 제어 자력에 반응하는 제1 및 제2 캡슐 마그넷(122, 124)을 가능한 멀리 떨어져 있게 배치함으로써 제어 자력에 대한 기계적 운동의 반응도를 향상시키기 위함이다.2 and 3, the
또한, 제1 및 제2 캡슐 마그넷(122, 124)은 서로 다른 자극이 캡슐 내시경(100)의 장변 측을 바라보도록 배치될 수 있는데, 이로써 제1 및 제2 캡슐 마그넷(122, 124) 사이의 거리를 충분히 확보할 수 있으며, 나아가 외부 제어기(200)의 제어 자력에 의해 캡슐 내시경(100)이 장기 내벽에 균일하게 밀착됨에 따라 실질적인 초음파 영상 획득이 가능해진다. 즉, 캡슐 내시경(100)과 장기 내벽 사이에 간극이 있으면 공기층에 의해 의미 있는 초음파 영상이 얻어지지 못하므로, 본 발명에 있어서 캡슐 내시경(100)을 장기 내벽에 밀착시키기 위한 제1 및 제2 캡슐 마그넷(122, 124)의 배치는 중요하다.In addition, the first and
또한, 제1 및 제2 캡슐 마그넷(122, 124)의 자극을 서로 다르게 하면 캡슐 내시경(100)의 방향을 특정할 수 있어 캡슐 내시경(100)의 자세 제어에 유리해진다. 예를 들어, 도면에 도시되지 않은 가시광 촬상소자를 캡슐 내시경(100)의 일단에 더 포함하는 경우라면, 제1 및 제2 캡슐 마그넷(122, 124)의 자극 방향으로부터 캡슐 내시경(100)에 내장된 가시광 촬상소자의 방향을 정확히 제어할 수 있게 된다.In addition, if the stimulation of the first and
참고로, 캡슐 내시경(100)은 초음파 엘리먼트 어레이(110)와 송수신부(130)에 전력을 공급하는 전원부(140)를 내장하고 있으며, 전원부(140)는 충전하여 반복 사용할 수 있는 2차 전지인 것이 바람직할 수 있다. 또한, 캡슐 내시경(100)의 전력 관리 측면에서 캡슐 마그넷(120)은 영구 자석인 것이 바람직할 것이다.For reference, the
도 4는 본 발명에 포함되는 외부 제어기(200)의 일 실시형태를 도시한 도면으로서, 외부 제어기(200)는 캡슐 내시경(100)의 제1 및 제2 캡슐 마그넷(122, 124)의 서로 다른 자극에 대응하는 자극이 제1 및 제2 캡슐 마그넷(122, 124)을 마주보도록 배치되는 외부 마그넷(230)을 구비한다. 외부 마그넷(230)은 캡슐 내시경(100)에 대한 제어 자력을 발생시키는 구성으로서, 영구 자석이거나 또는 전자석일 수 있다. 외부 제어기(200)는 인체의 외부에 배치되기 때문에 캡슐 내시경(100)에 비해 전력 관리의 문제가 상대적으로 덜 중요하기 때문에 반드시 외부 마그넷(230)을 영구 자석으로 구성할 필요는 없으며, 외부 마그넷(230)이 전자석이면 제어 자력의 강도를 조절하기 쉽다는 면에서 유리한 점이 있다. 외부 제어기(200) 역시 전원부(250)를 구비하며, 제어부(210) 및 구동부(240)에 의해 외부 마그넷(230)을 회전하여 자력선의 방향을 조절할 수도 있다.4 is a view showing an embodiment of the
외부 제어기(200)의 외부 마그넷(230)에서 발생하는 제어 자력은 인체를 투과하여 장기 내부에 있는 캡슐 내시경(100)의 제1 및 제2 캡슐 마그넷(122, 124)의 각 자극에 대해 인력으로 작용하며, 이로써 캡슐 내시경(100)은 장기 내벽에 밀착하면서 외부 제어기(200)의 움직임에 연동하여 장기 내에서 그 위치 및 자세가 제어된다.The control magnetic force generated from the
그리고, 외부 제어기(200)의 제어 자력에 의해 캡슐 내시경(100)이 장기 내벽에 밀착됨에 따라 인체 통신(Human Body Communication, HBC)을 기반으로 하는 유선 통신의 일종으로서 캡슐 내시경(100)은 초음파 영상을 외부로 송출할 수도 있다. 이처럼 인체 통신의 방식으로 초음파 영상을 송출하면, 무선 통신의 경우에 비해 소모 전력을 낮출 수 있어 보다 장시간의 캡슐 내시경(100) 운용이 가능해진다. 이런 경우, 송출된 초음파 영상은 인체에 접촉하는 외부 제어기(200)의 송수신부(220)에 의해 수신된 후 수신 장치(300)로 송신된다. 만일, 캡슐 내시경(100)이 무선 통신으로 초음파 영상을 송출하는 경우라면, 외부 제어기(200)가 중계하여 수신 장치(300)로 송신할 수도 있고, 또는 수신 장치(300)가 직접 무선 초음파 영상을 수신할 수도 있다.And, as the
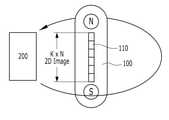
한편, 도 5는 1×N개의 초음파 엘리먼트 어레이(110)를 이용하여 3D 초음파 영상을 획득하는 원리를 도시한 도면이다. 도시된 도면에서, 초음파 엘리먼트 어레이(110)는 N개의 초음파 엘리먼트가 일렬로 배치된 어레이를 이루고 있다. 이런 경우, 초음파 영상은 K×N개의 매트릭스로 이루어진 2D 초음파 영상으로 획득된다(여기서, K는 초음파가 투과한 깊이를 의미함). 여기서, 외부 제어기(200)는 캡슐 내시경(100)의 초음파 엘리먼트 어레이(110)에서 송출되는 초음파의 진로를 가로지르는 방향으로 이동하면, 2D 초음파 영상이 외부 제어기(200)의 이동 방향을 따라 연속적으로 획득됨으로써 3D 초음파 영상이 얻어진다. 다시 말해, 2D의 초음파 단층 영상이 외부 제어기(200)의 이동 방향을 따라 3차원적으로 중첩되면서 3D 초음파 영상이 획득되는 것이며, 이는 수신 장치(300)에서의 신호 처리를 통해 디스플레이 장치(310)에 3차원 초음파 영상으로 표현된다.Meanwhile, FIG. 5 is a diagram illustrating a principle of acquiring a 3D ultrasound image using the 1×N
외부 제어기(200)의 운동에 의해 2D 초음파 영상이 3D 초음파 영상으로 확장되는 것이 기본이지만, 도 2의 (b)와 같이 초음파 엘리먼트 어레이(110)가 M×N개의 평면 매트릭스를 이루는 경우에는 K×M×N개의 매트릭스로 이루어진 3D 초음파 영상이 획득되고, 외부 제어기(200)의 운동에 대응하여 3D 초음파 영상의 영역이 확장된다. 초음파 엘리먼트 어레이(110)가 M×N개로 이루어진 경우에는, 3D 초음파 영상을 확장할 때 중첩하는 이미지가 있어서 최종적인 3차원 초음파 영상의 품질이 좀더 양호하며, 외부 제어기(200)의 운동이 3D 이미지 품질에 미치는 민감도가 줄어드는 이점이 있다.Although it is basic that the 2D ultrasound image is expanded into a 3D ultrasound image by the movement of the
그리고, 도 6은 캡슐 내시경(100)의 측위 정보를 포함하는 3D 초음파 영상을 획득하기 위한 본 발명의 일 실시형태를 도시한 도면이다. 캡슐 내시경(100)의 측위 정보를 초음파 영상과 함께 획득하게 되면, 장기 안쪽에서의 초음파 영상으로부터 장기 전체의 형태로서 3D 초음파 영상을 매핑할 수 있게 된다.And, FIG. 6 is a diagram illustrating an embodiment of the present invention for acquiring a 3D ultrasound image including positioning information of the
이를 위해, 캡슐 내시경(100)은 측위 신호를 방출하는 비컨(150)을 포함하고(도 3 참조), 수신 장치(300)는 비컨(150)에서 방출되는 측위 신호를 수신하는 적어도 3개 이상의 비컨 수신기(320)를 포함한다. 비컨(150)은 특정 신호를 3차원 공간상에 방출하며, 최소 3개의 수신 장치(300)를 이용하여 비컨 신호를 탐지하는 삼각 측량의 원리에 의해 비컨(150), 다시 말해 비컨(150)을 포함하는 캡슐 내시경(100)의 3차원 위치 정보를 획득할 수 있다.To this end, the
그리고, 수신 장치(300)는, 비컨 수신기(320)에 의해 결정된 캡슐 내시경(100)의 3차원 위치 정보를 캡슐 내시경(100)으로부터 수신된 대응하는 초음파 영상과 함께 저장하고 처리할 수 있다. 즉, 수신 장치(300)에 접수된 초음파 영상에는 그 초음파 영상이 획득된 캡슐 내시경(100)의 3차원 위치 정보가 메타데이터로서 포함되며, 이 3차원 위치 정보는 캡슐 내시경(100)이 밀착되어 있는 장기 내벽의 3차원 좌표에 대응하게 된다.In addition, the receiving
또한, 외부 제어기(200)는 캡슐 내시경(100)의 초음파 엘리먼트 어레이(110)에서 송출되는 초음파의 진로를 가로지르는 방향을 따라 360°로 한 바퀴를 이동할 수 있으며, 이에 따라 장기 내부의 360° 3D 초음파 영상을 획득할 수 있다. 이런 과정을 장기 내의 이동경로(소화관을 따라 음식물이 이동하는 경로)를 따라 일정 거리씩 반복하면, 해당 장기 전체의 전방향에 대한 3D 초음파 영상을 획득할 수 있게 된다.In addition, the
그리고, 수신 장치(300)는 360° 3D 초음파 영상을 메타데이터로서 포함되어 있는 캡슐 내시경(100)의 3차원 위치 정보에 기반하여 매핑하는 신호 처리를 수행할 수 있으며, 이러한 매핑 결과는 도 7에 예시된 것과 같은 장기 전체의 형태를 가진 3차원 영상으로 표현된다. 따라서, 사용자는 장기 전체의 3차원 영상을 회전, 확대하는 등의 조작을 통해 세밀히 관찰할 수 있는 것은 물론, 관심을 가진 2D 초음파 영상을 특정하면 이에 대응하는 3차원 위치 정보를 가진 영역을 3차원 영상 위에 표시함으로써 초음파 진단의 효율과 편리함을 향상시킬 수도 있게 된다.In addition, the receiving
이상의 설명은 본 발명의 기술 사상을 예시적으로 설명한 것에 불과한 것으로서, 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자라면 본 발명의 본질적인 특성에서 벗어나지 않는 범위에서 다양한 수정 및 변형이 가능할 것이다. 따라서, 본 발명에 개시된 실시예들은 본 발명의 기술 사상을 한정하기 위한 것이 아니라 설명하기 위한 것이고, 이러한 실시예에 의하여 본 발명의 기술 사상의 범위가 한정되는 것은 아니다.The above description is merely illustrative of the technical spirit of the present invention, and various modifications and variations will be possible without departing from the essential characteristics of the present invention by those skilled in the art to which the present invention pertains. Accordingly, the embodiments disclosed in the present invention are not intended to limit the technical spirit of the present invention, but to explain, and the scope of the technical spirit of the present invention is not limited by these embodiments.
10: 캡슐 내시경 시스템100: 캡슐 내시경
110: 초음파 엘리먼트 어레이120: 캡슐 마그넷
122: 제1 캡슐 마그넷124: 제2 캡슐 마그넷
130: 송수신부140: 전원부
150: 비컨200: 외부 제어기
210: 제어부220: 송수신부
230: 외부 마그넷240: 구동부
250: 전원부300: 수신 장치
310: 디스플레이 장치320: 비컨 수신기10: capsule endoscope system 100: capsule endoscope
110: ultrasonic element array 120: capsule magnet
122: first capsule magnet 124: second capsule magnet
130: transceiver 140: power unit
150: beacon 200: external controller
210: control unit 220: transceiver unit
230: external magnet 240: driving unit
250: power unit 300: receiving device
310: display device 320: beacon receiver
Claims (10)
Translated fromKorean인체 외부에 위치하며, 상기 캡슐 내시경의 위치와 자세를 제어하는 상기 제어 자력을 발생하는 외부 제어기; 및
상기 캡슐 내시경으로부터 송출되는 초음파 영상을 수신하고, 이 초음파 영상을 시각적으로 표시하는 디스플레이 장치를 포함하는 수신 장치;
를 포함하고,
상기 캡슐 내시경은 상기 제어 자력에 대해 작용하는 캡슐 마그넷을 구비하고, 상기 캡슐 마그넷은 제1 캡슐 마그넷 및 제2 캡슐 마그넷을 포함하며, 상기 제1 및 제2 캡슐 마그넷 사이에 상기 초음파 엘리먼트 어레이가 배치되고,
상기 제1 및 제2 캡슐 마그넷은 서로 다른 자극이 상기 캡슐 내시경의 장변 측을 바라보도록 배치되는 것을 특징으로 하는 3D 초음파 영상 획득을 위한 캡슐 내시경 시스템.It has a capsule size injected into the organ through the oral cavity, the position and posture are controlled by a control magnetic force acting from the outside, has at least 1×N ultrasonic element array, and the internal organ obtained by the ultrasonic element array Capsule endoscope for transmitting the ultrasound image from the wireless or wired communication to the outside;
an external controller positioned outside the human body and generating the control magnetic force to control the position and posture of the capsule endoscope; and
a receiving device including a display device for receiving the ultrasound image transmitted from the capsule endoscope and visually displaying the ultrasound image;
including,
The capsule endoscope has a capsule magnet acting against the control magnetic force, the capsule magnet includes a first capsule magnet and a second capsule magnet, and the ultrasonic element array is disposed between the first and second capsule magnets become,
The capsule endoscope system for 3D ultrasound image acquisition, characterized in that the first and second capsule magnets are arranged so that different stimuli face the long side of the capsule endoscope.
상기 외부 제어기는, 상기 캡슐 내시경의 제1 및 제2 캡슐 마그넷의 서로 다른 자극에 대응하는 자극이 상기 제1 및 제2 캡슐 마그넷을 마주보도록 배치되는 외부 마그넷을 구비하는 것을 특징으로 하는 3D 초음파 영상 획득을 위한 캡슐 내시경 시스템.The method according to claim 1,
3D ultrasound image, characterized in that the external controller includes an external magnet in which stimuli corresponding to different stimuli of the first and second capsule magnets of the capsule endoscope are disposed to face the first and second capsule magnets. Capsule endoscopy system for acquisition.
상기 외부 제어기는 상기 캡슐 내시경의 초음파 엘리먼트 어레이에서 송출되는 초음파의 진로를 가로지르는 방향으로 이동함으로써, 상기 수신 장치에서 3D 초음파 영상을 수신하는 것을 특징으로 하는 3D 초음파 영상 획득을 위한 캡슐 내시경 시스템.5. The method according to claim 4,
The capsule endoscope system for obtaining a 3D ultrasound image, characterized in that the external controller receives the 3D ultrasound image from the receiving device by moving in a direction transverse to the path of the ultrasound transmitted from the ultrasound element array of the capsule endoscope.
상기 초음파 엘리먼트 어레이는 M×N개로 배열된 초음파 엘리먼트 어레이인 것을 특징으로 하는 3D 초음파 영상 획득을 위한 캡슐 내시경 시스템.6. The method of claim 5,
The ultrasound element array is a capsule endoscope system for 3D ultrasound image acquisition, characterized in that the array of M×N ultrasound elements.
상기 캡슐 내시경은 측위 신호를 방출하는 비컨을 포함하고, 상기 수신 장치는 상기 비컨에서 방출되는 측위 신호를 수신하는 적어도 3개 이상의 비컨 수신기를 포함하는 것을 특징으로 하는 3D 초음파 영상 획득을 위한 캡슐 내시경 시스템.6. The method of claim 5,
The capsule endoscope includes a beacon that emits a positioning signal, and the receiving device includes at least three or more beacon receivers for receiving the positioning signal emitted from the beacon. A capsule endoscope system for acquiring a 3D ultrasound image .
상기 수신 장치는, 상기 비컨 수신기에 의해 결정된 상기 캡슐 내시경의 3차원 위치 정보를 상기 캡슐 내시경으로부터 수신된 대응하는 초음파 영상과 함께 저장하고 처리하는 것을 특징으로 하는 3D 초음파 영상 획득을 위한 캡슐 내시경 시스템.8. The method of claim 7,
The receiving device stores and processes the three-dimensional position information of the capsule endoscope determined by the beacon receiver together with the corresponding ultrasound image received from the capsule endoscope.
상기 외부 제어기는 상기 캡슐 내시경의 초음파 엘리먼트 어레이에서 송출되는 초음파의 진로를 가로지르는 방향을 따라 360°로 이동하여 상기 장기 내부의 360° 3D 초음파 영상을 획득하는 것을 특징으로 하는 3D 초음파 영상 획득을 위한 캡슐 내시경 시스템.9. The method of claim 8,
The external controller moves 360° along a direction transverse to the path of the ultrasound transmitted from the ultrasound element array of the capsule endoscope to acquire a 360° 3D ultrasound image of the inside of the organ. Capsule endoscopy system.
상기 수신 장치는 상기 360° 3D 초음파 영상을 상기 캡슐 내시경의 3차원 위치 정보에 기반하여 매핑함으로써, 장기 내부로부터의 초음파 영상을 3차원 영상으로 처리하는 것을 특징으로 하는 3D 초음파 영상 획득을 위한 캡슐 내시경 시스템.10. The method of claim 9,
The receiving device maps the 360° 3D ultrasound image based on the 3D position information of the capsule endoscope, thereby processing the ultrasound image from the inside of the organ into a 3D image. system.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020200004389AKR102357307B1 (en) | 2020-01-13 | 2020-01-13 | Capsule endoscopic ultrasonography system for acquiring 3D images |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020200004389AKR102357307B1 (en) | 2020-01-13 | 2020-01-13 | Capsule endoscopic ultrasonography system for acquiring 3D images |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20210090969A KR20210090969A (en) | 2021-07-21 |
| KR102357307B1true KR102357307B1 (en) | 2022-02-03 |
Family
ID=77143614
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020200004389AActiveKR102357307B1 (en) | 2020-01-13 | 2020-01-13 | Capsule endoscopic ultrasonography system for acquiring 3D images |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR102357307B1 (en) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005278816A (en) | 2004-03-29 | 2005-10-13 | Olympus Corp | Subject internal position detecting system |
| JP2006068501A (en) | 2004-08-03 | 2006-03-16 | Olympus Corp | Magnetic induction medical system |
| KR100707395B1 (en) | 2006-10-02 | 2007-04-13 | 한국항공대학교산학협력단 | Capsule Endoscope Device |
| KR100735863B1 (en) | 2006-10-16 | 2007-07-06 | 한국항공대학교산학협력단 | Capsule Endoscope Positioning System |
| US20110130658A1 (en) | 2007-08-16 | 2011-06-02 | Rdc Ltd. | Ultrasonic capsule |
| US20130317357A1 (en) | 2011-02-03 | 2013-11-28 | Gavriel J. Iddan | System and method for determining location and orientation of a device in-vivo |
| KR101731597B1 (en) | 2016-12-15 | 2017-04-28 | 주식회사 케이헬쓰웨어 | Transmitting System for Image Data using Capsule Type Endoscope and Method thereof |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101182999B1 (en) | 2009-11-25 | 2012-09-18 | 삼성메디슨 주식회사 | Ultrasound system and method for performing ultrasound image processing |
| KR101281125B1 (en)* | 2011-12-05 | 2013-07-05 | 주식회사 인트로메딕 | Method for processing data of capsule-type endoscope, capsule-type endoscope and apparatus for processing data transmitted from capsule-type endoscope |
| KR102061311B1 (en)* | 2018-01-09 | 2019-12-31 | 주식회사 엔도핀 | Swallowable device |
- 2020
- 2020-01-13KRKR1020200004389Apatent/KR102357307B1/enactiveActive
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005278816A (en) | 2004-03-29 | 2005-10-13 | Olympus Corp | Subject internal position detecting system |
| JP2006068501A (en) | 2004-08-03 | 2006-03-16 | Olympus Corp | Magnetic induction medical system |
| KR100707395B1 (en) | 2006-10-02 | 2007-04-13 | 한국항공대학교산학협력단 | Capsule Endoscope Device |
| KR100735863B1 (en) | 2006-10-16 | 2007-07-06 | 한국항공대학교산학협력단 | Capsule Endoscope Positioning System |
| US20110130658A1 (en) | 2007-08-16 | 2011-06-02 | Rdc Ltd. | Ultrasonic capsule |
| US20130317357A1 (en) | 2011-02-03 | 2013-11-28 | Gavriel J. Iddan | System and method for determining location and orientation of a device in-vivo |
| KR101731597B1 (en) | 2016-12-15 | 2017-04-28 | 주식회사 케이헬쓰웨어 | Transmitting System for Image Data using Capsule Type Endoscope and Method thereof |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20210090969A (en) | 2021-07-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Ciuti et al. | Frontiers of robotic endoscopic capsules: a review | |
| US20150327841A1 (en) | Tracking in ultrasound for imaging and user interface | |
| JP5314913B2 (en) | Capsule medical system | |
| CN106999146B (en) | Ultrasound imaging system with automatic image presentation | |
| Moglia et al. | Recent patents on wireless capsule endoscopy | |
| JP4813190B2 (en) | Capsule medical device | |
| US7907986B2 (en) | System and method for controlling a device in vivo | |
| US20050096526A1 (en) | Endoscopy device comprising an endoscopy capsule or an endoscopy head with an image recording device, and imaging method for such an endoscopy device | |
| US8235903B2 (en) | Remotely controlled implantable transducer and associated displays and controls | |
| US9125557B2 (en) | Magnetic maneuvering system for capsule endoscope | |
| KR102470147B1 (en) | Methods for Positioning and Orienting Portable Systems and Remote Objects | |
| US20070002038A1 (en) | Intra-subject position display system | |
| EP3942992A1 (en) | Magnetic control device of capsule endoscope and method for controlling movement of capsule endoscope in tissue cavity | |
| JP4422476B2 (en) | In-subject position detection system | |
| US20080281189A1 (en) | Medical guiding system | |
| JP2004113629A (en) | Ultrasonograph | |
| WO2015029970A1 (en) | Capsular endoscopic system | |
| US20210127072A1 (en) | Guidance systems and associated methods | |
| JPWO2008096744A1 (en) | Display device and in-subject information acquisition system using the same | |
| US9931022B2 (en) | Capsule medical device guidance system | |
| US11553836B2 (en) | Peroral endoscopic apparatus | |
| KR101600985B1 (en) | Medical imaging system using wireless capsule endoscope and medical image reconstruction method for the same | |
| CN114403775A (en) | Endoscopy examination system, endoscope, medical electric chair and examination method | |
| KR102357307B1 (en) | Capsule endoscopic ultrasonography system for acquiring 3D images | |
| JP2004121488A (en) | Ultrasonograph |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application | Patent event code:PA01091R01D Comment text:Patent Application Patent event date:20200113 | |
| PA0201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection | Comment text:Notification of reason for refusal Patent event date:20210713 Patent event code:PE09021S01D | |
| PG1501 | Laying open of application | ||
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration | Patent event code:PE07011S01D Comment text:Decision to Grant Registration Patent event date:20211228 | |
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment | Comment text:Registration of Establishment Patent event date:20220125 Patent event code:PR07011E01D | |
| PR1002 | Payment of registration fee | Payment date:20220126 End annual number:3 Start annual number:1 | |
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee | Payment date:20241224 Start annual number:4 End annual number:4 |