KR102135740B1 - 기판 처리 장치 및 기판 처리 방법 - Google Patents
기판 처리 장치 및 기판 처리 방법Download PDFInfo
- Publication number
- KR102135740B1 KR102135740B1KR1020140023493AKR20140023493AKR102135740B1KR 102135740 B1KR102135740 B1KR 102135740B1KR 1020140023493 AKR1020140023493 AKR 1020140023493AKR 20140023493 AKR20140023493 AKR 20140023493AKR 102135740 B1KR102135740 B1KR 102135740B1
- Authority
- KR
- South Korea
- Prior art keywords
- substrate
- chamber
- processing
- substrate processing
- process chamber
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Classifications
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32431—Constructional details of the reactor
- H01J37/32798—Further details of plasma apparatus not provided for in groups H01J37/3244 - H01J37/32788; special provisions for cleaning or maintenance of the apparatus
- H01J37/32899—Multiple chambers, e.g. cluster tools
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32431—Constructional details of the reactor
- H01J37/3244—Gas supply means
- H01J37/32449—Gas control, e.g. control of the gas flow
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32431—Constructional details of the reactor
- H01J37/32715—Workpiece holder
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/32—Gas-filled discharge tubes
- H01J37/32431—Constructional details of the reactor
- H01J37/32733—Means for moving the material to be treated
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67155—Apparatus for manufacturing or treating in a plurality of work-stations
- H01L21/67196—Apparatus for manufacturing or treating in a plurality of work-stations characterized by the construction of the transfer chamber
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67742—Mechanical parts of transfer devices
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67745—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber characterized by movements or sequence of movements of transfer devices
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67748—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber horizontal transfer of a single workpiece
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67754—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber horizontal transfer of a batch of workpieces
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68714—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support
- H01L21/68764—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support characterised by a movable susceptor, stage or support, others than those only rotating on their own vertical axis, e.g. susceptors on a rotating caroussel
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68714—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support
- H01L21/68771—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support characterised by supporting more than one semiconductor substrate
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Microelectronics & Electronic Packaging (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Power Engineering (AREA)
- Plasma & Fusion (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Robotics (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Drying Of Semiconductors (AREA)
Abstract
Description
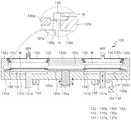
도 2는 도 1에 도시된 프로세스 챔버의 내부 구조를 보여주는 단면도.
도 3은 도 1에 도시된 기판 이송 로봇의 사시도.
도 4는 도 1에 도시된 기판 이송 로봇의 측면도.
도 5는 본 발명의 실시 예에 따른 기판 이송 방법으로 로드락 챔버에서 기판을 반출하는 과정을 보여주는 도면.
도 6 내지 도 12는 본 발명의 실시 예에 따른 기판 이송 방법으로 기판을 로딩 및 언로딩하는 과정을 보여주는 도면.
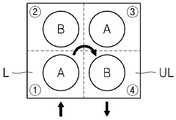
도 13 내지 도 15는 본 발명의 실시 예에 따라 프로세스 챔버 내에서 기판을 처리하는 다양한 방법을 개념적으로 보여주는 도면.
130: 프로세스 챔버 135: 기판이동부
137: 기판지지부 140: 가스분사체
200: 기판 이송 로봇
Claims (14)
- 로드락 챔버와;
상기 로드락 챔버의 일측에 배치되는 트랜스퍼 챔버와; 상기 트랜스퍼 챔버의 일측에 배치되는 프로세스 챔버; 및
상기 트랜스퍼 챔버 내부에 구비되어 상기 로드락 챔버와 상기 프로세스 챔버 간에 기판을 이송하는 기판 이송로봇;을 포함하고,
상기 프로세스 챔버는 내부에 기판을 지지하는 복수의 기판지지대와, 상기 복수의 기판지지대 상으로 공정 가스를 각각 분사하는 복수의 가스분사체 및 상기 복수의 기판지지대 간에 기판을 이송하는 턴테이블과, 미처리 기판이 인입되는 제1게이트와, 처리 기판이 인출되는 제2게이트가 구비되고,
상기 기판 이송로봇은 상기 미처리 기판과 상기 처리 기판을 상기 제1게이트와 상기 제2게이트를 통해 각각 개별적으로 이송하며,
상기 프로세스 챔버에는 상기 제1게이트 측에 로딩영역이 구비되고, 상기 제2게이트 측에 언로딩영역이 구비되며,
상기 로딩영역과 언로딩영역 각각에는 상기 복수의 기판지지대 중 어느 하나가 구비되어 기판 처리 공간을 형성하며,
상기 기판 이송 로봇은 상기 트랜스퍼 챔버에 설치되는 회전축과, 상기 회전축의 상부에 회전 가능하도록 연결되어 상기 제1게이트를 통해 상기 미처리 기판을 상기 프로세스 챔버로 이송하는 로딩암 및 상기 회전축에 회전 가능하도록 연결되어 상기 제2게이트를 통해 상기 프로세스 챔버 내 처리 기판을 인출하는 언로딩암을 포함하는 기판 처리 장치. - 청구항 1에 있어서,
상기 프로세스 챔버는 상부가 개방되고 내부 공간이 형성되는 본체와,
상기 본체의 상부에 구비되어 상기 본체의 상부를 커버하는 탑리드를 포함하고,
상기 탑리드에는 상하방향으로 연장되어 그 내부에 기판이 처리되는 공간을 형성하는 연장부가 구비되는 기판 처리 장치. - 청구항 2에 있어서,
상기 탑리드에 상기 기판이 처리되는 공간이 복수 개 형성되고,
상기 가스분사체와 상기 기판 지지대는 상기 기판이 처리되는 공간의 개수에 대응하는 개수로 구비되는 기판 처리 장치. - 청구항 3에 있어서,
상기 복수개의 가스분사체 중 적어도 하나는 나머지 가스분사체와 다른 공정 가스를 분사하는 기판 처리 장치. - 청구항 4에 있어서,
상기 턴테이블 상부에는 기판을 지지하는 복수의 기판 지지링이 구비되고,
상기 턴테이블에는 상기 기판 지지대가 관통되는 복수의 개구가 형성되며 상기 개구에는 상기 기판 지지링을 지지하도록 상기 개구 내측으로 돌기가 구비되고,
상기 기판 지지링은 상기 기판지지대와 턴테이블에 선택적으로 지지되는 기판 처리 장치. - 삭제
- 청구항 1에 있어서,
상기 로드락 챔버는 미처리 기판이 수용되는 제1로드락 챔버와, 상기 프로세스 챔버에서 처리가 완료된 처리 기판이 수용되는 제2로드락 챔버를 포함하는 기판 처리 장치. - 로드락 챔버와, 상기 로드락 챔버의 일측에 배치되는 트랜스퍼 챔버와, 상기 트랜스퍼 챔버의 일측에 배치되는 프로세스 챔버와, 상기 트랜스퍼 챔버에 배치되는 기판 이송 로봇을 포함하는 청구항 1 내지 청구항 5 중 어느 하나의 항에 따른 기판 처리 장치를 이용하여 기판을 처리하는 방법으로서,
상기 프로세스 챔버에는 미처리 기판이 인입되는 제1게이트와, 처리 기판이 인출되는 제2게이트가 구비되며,
상기 기판 이송 로봇은 상기 제1게이트를 통해 상기 미처리 기판을 상기 프로세스 챔버로 인입하고, 상기 제2게이트를 통해 상기 프로세스 챔버 내 처리 기판을 인출하는 기판 처리 방법. - 청구항 8에 있어서,
상기 프로세스 챔버는 복수개의 기판지지대와, 상기 복수개의 기판 지지대에 대향되게 배치되는 복수개의 가스분사체와, 상기 복수의 기판 지지대 간에 기판을 이송하는 턴테이블 및 상기 복수개의 기판지지대와 복수개의 가스분사체 사이에 각각 형성되는 복수개의 기판 처리 공간을 포함하며,
상기 복수개의 기판 처리 공간 중 어느 하나의 기판 처리 공간에서 기판 처리가 완료되면, 상기 턴테이블의 회전 구동에 의해 상기 기판을 다른 기판지지대로 이동시켜 서로 다른 기판 처리 공간에서 기판 처리를 수행하는 기판 처리 방법. - 청구항 9에 있어서,
상기 로딩영역의 기판 처리 공간에서 기판 처리를 시작하여 상기 언로딩영역의 기판 처리 공간에서 기판 처리가 완료되는 기판 처리 방법. - 청구항 10에 있어서,
상기 복수개의 가스분사체로 모두 동일한 공정 가스를 공급하여 상기 복수개의 기판 처리 공간에서 모두 동일한 기판 처리를 수행하는 기판 처리 방법. - 청구항 10에 있어서,
상기 복수개의 가스분사체 중 적어도 어느 하나의 가스분사체로 다른 공정 가스를 공급하여 상기 복수개의 기판 처리 공간 중 적어도 어느 하나의 기판 처리 공간에서 서로 다른 기판 처리를 수행하는 기판 처리 방법. - 청구항 12에 있어서,
상기 로딩영역에 구비되는 기판 처리 공간과 상기 언로딩영역에 구비되는 기판 처리 공간에서 서로 다른 기판 처리를 수행하는 기판 처리 방법. - 청구항 9에 있어서,
상기 복수개의 기판 처리 공간 중 적어도 하나의 기판 처리 공간 내에서 기판의 플라즈마 처리를 수행하는 기판 처리 방법.
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020140023493AKR102135740B1 (ko) | 2014-02-27 | 2014-02-27 | 기판 처리 장치 및 기판 처리 방법 |
| JP2015028395AJP6062975B2 (ja) | 2014-02-27 | 2015-02-17 | 基板処理装置及び基板処理方法 |
| TW104105490ATWI587425B (zh) | 2014-02-27 | 2015-02-17 | 基板處理裝置及基板處理方法 |
| CN201510087749.9ACN104882395B (zh) | 2014-02-27 | 2015-02-26 | 基板处理装置及基板处理方法 |
| US14/633,123US20150243490A1 (en) | 2014-02-27 | 2015-02-26 | Substrate processing apparatus and substrate processing method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020140023493AKR102135740B1 (ko) | 2014-02-27 | 2014-02-27 | 기판 처리 장치 및 기판 처리 방법 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20150101786A KR20150101786A (ko) | 2015-09-04 |
| KR102135740B1true KR102135740B1 (ko) | 2020-07-20 |
Family
ID=53882889
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020140023493AActiveKR102135740B1 (ko) | 2014-02-27 | 2014-02-27 | 기판 처리 장치 및 기판 처리 방법 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20150243490A1 (ko) |
| JP (1) | JP6062975B2 (ko) |
| KR (1) | KR102135740B1 (ko) |
| CN (1) | CN104882395B (ko) |
| TW (1) | TWI587425B (ko) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9388494B2 (en) | 2012-06-25 | 2016-07-12 | Novellus Systems, Inc. | Suppression of parasitic deposition in a substrate processing system by suppressing precursor flow and plasma outside of substrate region |
| US9617638B2 (en) | 2014-07-30 | 2017-04-11 | Lam Research Corporation | Methods and apparatuses for showerhead backside parasitic plasma suppression in a secondary purge enabled ALD system |
| JP6447393B2 (ja)* | 2015-07-06 | 2019-01-09 | 東京エレクトロン株式会社 | 成膜処理装置、成膜処理方法及び記憶媒体 |
| US9508547B1 (en)* | 2015-08-17 | 2016-11-29 | Lam Research Corporation | Composition-matched curtain gas mixtures for edge uniformity modulation in large-volume ALD reactors |
| US9929034B2 (en)* | 2015-09-03 | 2018-03-27 | Kawasaki Jukogyo Kabushiki Kaisha | Substrate transfer device |
| KR102709229B1 (ko) | 2015-12-07 | 2024-09-23 | 어플라이드 머티어리얼스, 인코포레이티드 | 병합형 커버 링 |
| US9738977B1 (en) | 2016-06-17 | 2017-08-22 | Lam Research Corporation | Showerhead curtain gas method and system for film profile modulation |
| JP6665760B2 (ja)* | 2016-11-16 | 2020-03-13 | 日本電気硝子株式会社 | ガラス基板の製造装置及び製造方法 |
| US10522387B2 (en) | 2016-12-15 | 2019-12-31 | Taiwan Semiconductor Manufacturing Company, Ltd. | Semiconductor device and multi-wafer deposition apparatus |
| KR101928008B1 (ko) | 2017-04-24 | 2018-12-11 | 세메스 주식회사 | 기판 처리 장치 및 기판 처리 방법 |
| JP6826166B2 (ja)* | 2018-08-16 | 2021-02-03 | ウォニク アイピーエス カンパニー リミテッドWonik Ips Co.,Ltd. | 熱処理システム及び熱処理装置 |
| US12087573B2 (en) | 2019-07-17 | 2024-09-10 | Lam Research Corporation | Modulation of oxidation profile for substrate processing |
| KR102325772B1 (ko)* | 2019-10-28 | 2021-11-12 | 세메스 주식회사 | 기판처리장치 |
| JP7660362B2 (ja)* | 2020-11-10 | 2025-04-11 | 東京エレクトロン株式会社 | 基板処理システム、基板処理方法、および制御プログラム |
| KR102459640B1 (ko)* | 2020-12-21 | 2022-10-27 | 주식회사 테스 | 기판처리장치 |
| KR102394121B1 (ko)* | 2021-10-08 | 2022-05-04 | (주) 티로보틱스 | 기판 이송 로봇을 챔버 내에서 주행하기 위한 주행 로봇 |
| WO2024191109A1 (ko)* | 2023-03-10 | 2024-09-19 | 주식회사 플라메디 | 대기 플라즈마 표면 처리장치 및 그 제어방법 |
| WO2025083109A2 (de)* | 2023-10-18 | 2025-04-24 | Aixtron Se | Be- und entladezyklus für ein cvd-reaktorsystem |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040067641A1 (en)* | 2002-10-02 | 2004-04-08 | Applied Materials, Inc. | Gas distribution system for cyclical layer deposition |
| JP2007049150A (ja)* | 2005-08-05 | 2007-02-22 | Advanced Micro-Fabrication Equipment Inc Asia | 半導体ワークピース処理システム及びその処理方法 |
| WO2013116478A1 (en) | 2012-01-31 | 2013-08-08 | Applied Materials, Inc. | Multi-chamber substrate processing systems |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4009603A1 (de)* | 1989-03-30 | 1990-10-04 | Leybold Ag | Vorrichtung zum ein- und ausschleusen eines werkstuecks in eine vakuumkammer |
| US5795399A (en)* | 1994-06-30 | 1998-08-18 | Kabushiki Kaisha Toshiba | Semiconductor device manufacturing apparatus, method for removing reaction product, and method of suppressing deposition of reaction product |
| JP2002504744A (ja)* | 1997-11-28 | 2002-02-12 | マットソン テクノロジイ インコーポレイテッド | 真空処理を行う非加工物を、低汚染かつ高処理能力で取扱うためのシステムおよび方法 |
| US6143082A (en)* | 1998-10-08 | 2000-11-07 | Novellus Systems, Inc. | Isolation of incompatible processes in a multi-station processing chamber |
| JP2001196437A (ja)* | 2000-01-12 | 2001-07-19 | Anelva Corp | 基板搬送システム及びこの基板搬送システムが設けられた基板処理装置 |
| CA2399387C (en)* | 2000-02-11 | 2015-11-03 | Biogen, Inc. | Heterologous polypeptide of the tnf family |
| US6506252B2 (en)* | 2001-02-07 | 2003-01-14 | Emcore Corporation | Susceptorless reactor for growing epitaxial layers on wafers by chemical vapor deposition |
| JP4683453B2 (ja)* | 2001-04-27 | 2011-05-18 | 芝浦メカトロニクス株式会社 | 真空処理装置 |
| US6592675B2 (en)* | 2001-08-09 | 2003-07-15 | Moore Epitaxial, Inc. | Rotating susceptor |
| US20030230385A1 (en)* | 2002-06-13 | 2003-12-18 | Applied Materials, Inc. | Electro-magnetic configuration for uniformity enhancement in a dual chamber plasma processing system |
| JP4595727B2 (ja)* | 2005-07-22 | 2010-12-08 | ソニー株式会社 | 外力推定システム及び外力推定方法、並びにコンピュータ・プログラム |
| CN100466166C (zh)* | 2006-05-17 | 2009-03-04 | 台湾积体电路制造股份有限公司 | 制程设备组 |
| KR100839191B1 (ko)* | 2007-03-28 | 2008-06-17 | 세메스 주식회사 | 기판 처리 장치 및 방법 |
| US8060252B2 (en)* | 2007-11-30 | 2011-11-15 | Novellus Systems, Inc. | High throughput method of in transit wafer position correction in system using multiple robots |
| US20110049779A1 (en)* | 2009-08-28 | 2011-03-03 | Applied Materials, Inc. | Substrate carrier design for improved photoluminescence uniformity |
| IT1396514B1 (it)* | 2009-11-27 | 2012-12-14 | Nuovo Pignone Spa | Metodo di controllo di turbina basato su rapporto tra temperatura di scarico e pressione di turbina |
| US9076829B2 (en)* | 2011-08-08 | 2015-07-07 | Applied Materials, Inc. | Robot systems, apparatus, and methods adapted to transport substrates in electronic device manufacturing |
| JP6000665B2 (ja)* | 2011-09-26 | 2016-10-05 | 株式会社日立国際電気 | 半導体装置の製造方法、基板処理装置及びプログラム |
- 2014
- 2014-02-27KRKR1020140023493Apatent/KR102135740B1/koactiveActive
- 2015
- 2015-02-17TWTW104105490Apatent/TWI587425B/zhactive
- 2015-02-17JPJP2015028395Apatent/JP6062975B2/jaactiveActive
- 2015-02-26CNCN201510087749.9Apatent/CN104882395B/zhactiveActive
- 2015-02-26USUS14/633,123patent/US20150243490A1/ennot_activeAbandoned
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20040067641A1 (en)* | 2002-10-02 | 2004-04-08 | Applied Materials, Inc. | Gas distribution system for cyclical layer deposition |
| JP2007049150A (ja)* | 2005-08-05 | 2007-02-22 | Advanced Micro-Fabrication Equipment Inc Asia | 半導体ワークピース処理システム及びその処理方法 |
| WO2013116478A1 (en) | 2012-01-31 | 2013-08-08 | Applied Materials, Inc. | Multi-chamber substrate processing systems |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6062975B2 (ja) | 2017-01-18 |
| CN104882395B (zh) | 2018-06-12 |
| CN104882395A (zh) | 2015-09-02 |
| TW201535571A (zh) | 2015-09-16 |
| US20150243490A1 (en) | 2015-08-27 |
| KR20150101786A (ko) | 2015-09-04 |
| JP2015162677A (ja) | 2015-09-07 |
| TWI587425B (zh) | 2017-06-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102135740B1 (ko) | 기판 처리 장치 및 기판 처리 방법 | |
| KR102014279B1 (ko) | 기판 처리 장치 | |
| KR102244354B1 (ko) | 기판 반송 기구, 기판 처리 장치 및 기판 반송 방법 | |
| US10403523B2 (en) | Substrate processing apparatus | |
| US9368380B2 (en) | Substrate processing device with connection space | |
| KR20100032812A (ko) | 화학기상증착 장치와 이를 이용한 기판 처리 시스템 | |
| US20130276983A1 (en) | Injection member for manufacturing semiconductor device and plasma processing apparatus having the same | |
| KR101133390B1 (ko) | 열처리 방법 및 열처리 장치 | |
| KR102125512B1 (ko) | 기판 처리 장치 및 기판 처리 방법 | |
| KR101032217B1 (ko) | 배치 증착 도구 및 압축된 보트 | |
| KR20080020517A (ko) | 버퍼 메커니즘을 가진 기판 처리장치 및 기판 이송장치 | |
| JP2015517210A (ja) | 選択的エピタキシャル成長のための装置およびクラスター設備 | |
| US20110305835A1 (en) | Systems and methods for a gas treatment of a number of substrates | |
| US10854497B2 (en) | Apparatus and method of selective turning over a row of substrates in an array of substrates in a processing system | |
| KR101372333B1 (ko) | 기판 처리 모듈 및 이를 포함하는 기판 처리 장치 | |
| KR20140090011A (ko) | 반도체 웨이퍼의 연속 처리방법 | |
| CN108122809B (zh) | 基板处理系统 | |
| US20200075376A1 (en) | Substrate transfer mechanism, substrate processing apparatus, and substrate transfer method | |
| KR101392378B1 (ko) | 기판처리장치 | |
| KR101392379B1 (ko) | 기판처리장치 | |
| KR101471540B1 (ko) | 기판처리방법 및 기판처리장치 | |
| KR100903521B1 (ko) | 기판 처리 방법 | |
| KR20210119185A (ko) | 이송로봇 및 이를 포함하는 기판처리시스템 | |
| KR101651882B1 (ko) | 기판처리장치 | |
| KR101499465B1 (ko) | 원자층 증착 공정용 대면적 기판 처짐 방지 물류 장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application | Patent event code:PA01091R01D Comment text:Patent Application Patent event date:20140227 | |
| PG1501 | Laying open of application | ||
| N231 | Notification of change of applicant | ||
| PN2301 | Change of applicant | Patent event date:20160415 Comment text:Notification of Change of Applicant Patent event code:PN23011R01D | |
| A201 | Request for examination | ||
| PA0201 | Request for examination | Patent event code:PA02012R01D Patent event date:20171212 Comment text:Request for Examination of Application Patent event code:PA02011R01I Patent event date:20140227 Comment text:Patent Application | |
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection | Comment text:Notification of reason for refusal Patent event date:20190627 Patent event code:PE09021S01D | |
| E90F | Notification of reason for final refusal | ||
| PE0902 | Notice of grounds for rejection | Comment text:Final Notice of Reason for Refusal Patent event date:20200220 Patent event code:PE09021S02D | |
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration | Patent event code:PE07011S01D Comment text:Decision to Grant Registration Patent event date:20200618 | |
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment | Comment text:Registration of Establishment Patent event date:20200714 Patent event code:PR07011E01D | |
| PR1002 | Payment of registration fee | Payment date:20200714 End annual number:3 Start annual number:1 | |
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee | Payment date:20240603 Start annual number:5 End annual number:5 | |
| PR1001 | Payment of annual fee | Payment date:20250610 Start annual number:6 End annual number:6 |