KR102095817B1 - 이동 로봇, 이동 로봇의 충전대 및 이들을 포함하는 이동 로봇 시스템 - Google Patents
이동 로봇, 이동 로봇의 충전대 및 이들을 포함하는 이동 로봇 시스템Download PDFInfo
- Publication number
- KR102095817B1 KR102095817B1KR1020130131623AKR20130131623AKR102095817B1KR 102095817 B1KR102095817 B1KR 102095817B1KR 1020130131623 AKR1020130131623 AKR 1020130131623AKR 20130131623 AKR20130131623 AKR 20130131623AKR 102095817 B1KR102095817 B1KR 102095817B1
- Authority
- KR
- South Korea
- Prior art keywords
- light
- charging
- light absorbing
- pattern
- mobile robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- H02J7/0042—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries characterised by the mechanical construction
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2805—Parameters or conditions being sensed
- A47L9/281—Parameters or conditions being sensed the amount or condition of incoming dirt or dust
- A47L9/2815—Parameters or conditions being sensed the amount or condition of incoming dirt or dust using optical detectors
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/28—Installation of the electric equipment, e.g. adaptation or attachment to the suction cleaner; Controlling suction cleaners by electric means
- A47L9/2868—Arrangements for power supply of vacuum cleaners or the accessories thereof
- A47L9/2873—Docking units or charging stations
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- G—PHYSICS
- G01—MEASURING; TESTING
- G01B—MEASURING LENGTH, THICKNESS OR SIMILAR LINEAR DIMENSIONS; MEASURING ANGLES; MEASURING AREAS; MEASURING IRREGULARITIES OF SURFACES OR CONTOURS
- G01B11/00—Measuring arrangements characterised by the use of optical techniques
- G01B11/24—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures
- G01B11/25—Measuring arrangements characterised by the use of optical techniques for measuring contours or curvatures by projecting a pattern, e.g. one or more lines, moiré fringes on the object
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0212—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory
- G05D1/0225—Control of position or course in two dimensions specially adapted to land vehicles with means for defining a desired trajectory involving docking at a fixed facility, e.g. base station or loading bay
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0231—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means
- G05D1/0234—Control of position or course in two dimensions specially adapted to land vehicles using optical position detecting means using optical markers or beacons
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/648—Performing a task within a working area or space, e.g. cleaning
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J7/00—Circuit arrangements for charging or depolarising batteries or for supplying loads from batteries
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L2201/00—Robotic cleaning machines, i.e. with automatic control of the travelling movement or the cleaning operation
- A47L2201/02—Docking stations; Docking operations
- A47L2201/022—Recharging of batteries
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2105/00—Specific applications of the controlled vehicles
- G05D2105/10—Specific applications of the controlled vehicles for cleaning, vacuuming or polishing
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Robotics (AREA)
- General Physics & Mathematics (AREA)
- Power Engineering (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Aviation & Aerospace Engineering (AREA)
- Automation & Control Theory (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Electromagnetism (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- Manipulator (AREA)
- Electric Vacuum Cleaner (AREA)
Abstract
Description
도 2는 본 발명의 일 실시예에 따른 이동 로봇의 구성을 개략적으로 도시한 블록도이다.
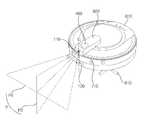
도 3은 이동 로봇의 일 예로서 로봇 청소기를 도시한 사시도이다.
도 4는 도 3의 로봇 청소기의 구성을 개략적으로 도시한 블록도이다.
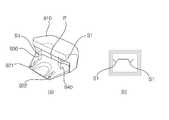
도 5는 본 발명의 일 실시예에 따른 충전대(a)와, 충전대를 촬영한 입력영상(b)을 도시한 것이다.
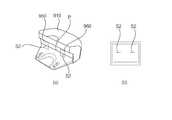
도 6은 본 발명의 다른 실시예에 따른 충전대(a)와, 충전대를 촬영한 입력영상(b)을 도시한 것이다.
도 7은 본 발명의 또 다른 실시예에 따른 충전대의 위치표지부의 정면도(a)와, A-A를 따라 절개한 단면도(b)를 도시한 것이다.
도 8은 본 발명의 일 실시예에 따른 로봇 청소기의 제어방법을 도시한 순서도이다.
도 9는 본 발명의 다른 실시예에 따른 로봇 청소기의 제어방법을 도시한 순서도이다.
Claims (20)
- 패턴 광을 조사하는 이동 로봇을 충전시키는 충전대에 있어서,
상기 이동 로봇이 도킹됨으로써 충전이 이루어지는 충전대 본체; 및
상기 충전대 본체에 구비되고, 상기 패턴 광이 표면에 조사될 시, 주변부와 구분되는 표식을 형성하는 위치 표지부를 포함하고,
상기 위치 표지부는
입사된 광량 중 일정 수준 이상을 흡수하는 복수개의 광 흡수면; 및
상기 광 흡수면 들 사이에 배치되는 2 이상의 광 반사면을 포함하며,
상기 복수개의 광 흡수면 중 2개의 광 흡수면이 상기 위치 표지부의 양단에 각각 위치되며,
상기 광 반사면들과 상기 광 흡수면들 사이의 경계를 정의하는 변계선 중 하나는 상기 충전대 중심을 통과하는 수직 기준선과 일치하는 충전대. - 제 1 항에 있어서,
상기 광 반사면은 평면을 이루는 충전대. - 제 1 항에 있어서,
상기 광 반사면은,
제 1 광 반사면 및 제 2 광 반사면을 포함하고, 상기 제 1 광 반사면 및 상기 제 2 광 반사면은 수평방향으로 차례로 배치되고,
상기 광 흡수면은,
제 1 광 흡수면, 제 2 광 흡수면 및 제 3 광 흡수면을 포함하며, 상기 제 1 광 반사면은 상기 제 1 광 흡수면과 상기 제 2 광 흡수면 사이에 배치되고, 상기 제 2 광 반사면은 상기 제 2 광 흡수면과 상기 제 3 광 흡수면 사이에 배치되며,
상기 제 1 광 반사면과 상기 제 2 광 흡수면 사이의 변계선은 상기 수직 기준선과 일치하는 충전대. - 제 1 항에 있어서,
상기 광 반사면의 수평방향 폭은 서로 동일한 충전대. - 제 1 항에 있어서,
상기 광 흡수면의 수평방향 폭은 서로 다른 충전대. - 제 3 항에 있어서,
상기 제 2 광 흡수면은 상기 제 3 광 흡수면보다 수평방향 폭이 긴 충전대. - 제 1항에 있어서,
상기 광 반사면과 상기 광 흡수면이 횡단면 상에서 상단면의 높이가 다르게 배치되는 충전대. - 제 1항에 있어서,
상기 광 흡수면의 수평방향 폭은 상기 광 반사면의 수평방향 폭과 다른 충전대. - 제 1 항에 있어서,
상기 위치 표지부와 바닥면 사이에 수평방향으로 연장 형성되는 충전단자를 구비하는 충전대. - 이동 로봇; 및
제1항 내지 제9항 중 어느 한 항에 기재된 충전대를 포함하는 이동 로봇 시스템. - 패턴 광을 조사하는 이동 로봇을 충전시키는 충전대에 있어서,
상기 이동 로봇이 도킹됨으로써 충전이 이루어지는 충전대 본체; 및
상기 충전대 본체에 구비되고, 상기 패턴 광이 표면에 조사될 시, 주변부와 구분되는 표식을 형성하는 위치 표지부를 포함하고,
상기 위치 표지부는
복수개의 광 흡수면; 및
상기 광 흡수면 들 사이에 배치되는 2 이상의 광 반사면을 포함하며,
상기 복수개의 광 흡수면 중 2개의 광 흡수면이 상기 위치 표지부의 양단에 각각 위치되며,
상기 충전대 중심을 통과하는 수직 기준선을 기준으로 상기 수직 기준선의 일측에 배치되는 모든 상기 광 반사면과 상기 광 흡수면의 수평방향 폭의 합과 상기 수직 기준선의 타측에 배치되는 모든 상기 광 반사면과 상기 광 흡수면의 수평방향 폭의 합이 동일하는 충전대. - 제 11 항에 있어서,
상기 광 반사면은 평면을 이루는 충전대. - 제 11 항에 있어서,
상기 광 반사면은,
제 1 광 반사면 및 제 2 광 반사면을 포함하고, 상기 제 1 광 반사면 및 상기 제 2 광 반사면은 수평방향으로 차례로 배치되고,
상기 광 흡수면은,
제 1 광 흡수면, 제 2 광 흡수면 및 제 3 광 흡수면을 포함하며, 상기 제 1 광 반사면은 상기 제 1 광 흡수면과 상기 제 2 광 흡수면 사이에 배치되고, 상기 제 2 광 반사면은 상기 제 2 광 흡수면과 상기 제 3 광 흡수면 사이에 배치되며,
상기 제 1 광 반사면과 상기 제 2 광 흡수면 사이의 변계선은 상기 수직 기준선과 일치하는 충전대. - 제 11 항에 있어서,
상기 광 반사면의 수평방향 폭은 서로 동일한 충전대. - 제 11 항에 있어서,
상기 광 흡수면의 수평방향 폭은 서로 다른 충전대. - 제 13 항에 있어서,
상기 제 2 광 흡수면은 상기 제 3 광 흡수면보다 수평방향 폭이 긴 충전대. - 제 11 항에 있어서,
상기 광 반사면과 상기 광 흡수면이 구성하는 상기 위치 표지부의 횡단면은 요철 형상을 이루는 충전대. - 제 11 항에 있어서,
상기 위치 표지부와 바닥면 사이에 배치되는 두개의 충전단자를 구비하는 충전대. - 제18항에 있어서,
상기 충전단자는 수평방향으로 연장 형성되는 충전대. - 이동 로봇; 및
제11항 내지 제19항 중 어느 한 항에 기재된 충전대를 포함하는 이동 로봇 시스템.
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020130131623AKR102095817B1 (ko) | 2013-10-31 | 2013-10-31 | 이동 로봇, 이동 로봇의 충전대 및 이들을 포함하는 이동 로봇 시스템 |
| CN201410602263.XACN104586320B (zh) | 2013-10-31 | 2014-10-31 | 移动机器人、移动机器人的充电座、移动机器人系统 |
| US14/529,774US20150115876A1 (en) | 2013-10-31 | 2014-10-31 | Mobile robot, charging apparatus for the mobile robot, and mobile robot system |
| CN201710351874.5ACN107260069B (zh) | 2013-10-31 | 2014-10-31 | 移动机器人、移动机器人的充电座、移动机器人系统 |
| CN201710351858.6ACN107297755B (zh) | 2013-10-31 | 2014-10-31 | 移动机器人、移动机器人的充电座、移动机器人系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020130131623AKR102095817B1 (ko) | 2013-10-31 | 2013-10-31 | 이동 로봇, 이동 로봇의 충전대 및 이들을 포함하는 이동 로봇 시스템 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20150050161A KR20150050161A (ko) | 2015-05-08 |
| KR102095817B1true KR102095817B1 (ko) | 2020-04-01 |
Family
ID=52994656
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020130131623AActiveKR102095817B1 (ko) | 2013-10-31 | 2013-10-31 | 이동 로봇, 이동 로봇의 충전대 및 이들을 포함하는 이동 로봇 시스템 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20150115876A1 (ko) |
| KR (1) | KR102095817B1 (ko) |
| CN (3) | CN104586320B (ko) |
Families Citing this family (80)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101575597B1 (ko)* | 2014-07-30 | 2015-12-08 | 엘지전자 주식회사 | 로봇 청소 시스템 및 로봇 청소기의 제어방법 |
| CN104935039A (zh)* | 2015-06-10 | 2015-09-23 | 瑞声声学科技(深圳)有限公司 | 移动通信设备及其低电量自动充电的方法 |
| KR102398330B1 (ko)* | 2015-06-12 | 2022-05-16 | 엘지전자 주식회사 | 이동 로봇 및 그 제어방법 |
| DE102015109775B3 (de) | 2015-06-18 | 2016-09-22 | RobArt GmbH | Optischer Triangulationssensor zur Entfernungsmessung |
| DE102015114883A1 (de) | 2015-09-04 | 2017-03-09 | RobArt GmbH | Identifizierung und Lokalisierung einer Basisstation eines autonomen mobilen Roboters |
| CN106602627B (zh)* | 2015-10-20 | 2019-06-21 | 苏州宝时得电动工具有限公司 | 充电对接系统及方法 |
| GB201518652D0 (en)* | 2015-10-21 | 2015-12-02 | F Robotics Acquisitions Ltd | Domestic robotic system and method |
| DE102015119501A1 (de) | 2015-11-11 | 2017-05-11 | RobArt GmbH | Unterteilung von Karten für die Roboternavigation |
| DE102015119865B4 (de) | 2015-11-17 | 2023-12-21 | RobArt GmbH | Robotergestützte Bearbeitung einer Oberfläche mittels eines Roboters |
| DE102015121666B3 (de) | 2015-12-11 | 2017-05-24 | RobArt GmbH | Fernsteuerung eines mobilen, autonomen Roboters |
| CN105990876B (zh)* | 2015-12-21 | 2019-03-01 | 小米科技有限责任公司 | 充电桩及其识别方法、装置和自动清洁设备 |
| CN107037807B (zh)* | 2016-02-04 | 2020-05-19 | 科沃斯机器人股份有限公司 | 自移动机器人位姿校准系统和方法 |
| DE102016102644A1 (de) | 2016-02-15 | 2017-08-17 | RobArt GmbH | Verfahren zur Steuerung eines autonomen mobilen Roboters |
| US9840154B2 (en) | 2016-04-01 | 2017-12-12 | Locus Robotics Corporation | Electrical charging system for a robot |
| JPWO2017187922A1 (ja)* | 2016-04-27 | 2019-03-07 | パナソニックIpマネジメント株式会社 | 自走式掃除機器および自走式掃除機器の制御方法 |
| TWI653964B (zh)* | 2016-05-17 | 2019-03-21 | Lg電子股份有限公司 | 行動機器人及其控制方法 |
| CN207979622U (zh)* | 2016-05-17 | 2018-10-19 | Lg电子株式会社 | 机器人吸尘器 |
| WO2017200347A1 (ko) | 2016-05-20 | 2017-11-23 | 엘지전자 주식회사 | 로봇 청소기 |
| US10342405B2 (en) | 2016-05-20 | 2019-07-09 | Lg Electronics Inc. | Autonomous cleaner |
| WO2017200353A1 (ko) | 2016-05-20 | 2017-11-23 | 엘지전자 주식회사 | 로봇 청소기 |
| WO2017200343A1 (ko) | 2016-05-20 | 2017-11-23 | 엘지전자 주식회사 | 로봇 청소기 |
| WO2017200344A1 (ko) | 2016-05-20 | 2017-11-23 | 엘지전자 주식회사 | 로봇 청소기 |
| WO2017200345A1 (ko) | 2016-05-20 | 2017-11-23 | 엘지전자 주식회사 | 로봇 청소기 |
| RU2710413C1 (ru)* | 2016-05-20 | 2019-12-26 | ЭлДжи ЭЛЕКТРОНИКС ИНК. | Робот-пылесос |
| US10463221B2 (en) | 2016-05-20 | 2019-11-05 | Lg Electronics Inc. | Autonomous cleaner |
| WO2017200350A1 (ko) | 2016-05-20 | 2017-11-23 | 엘지전자 주식회사 | 로봇 청소기 |
| WO2017200346A1 (ko) | 2016-05-20 | 2017-11-23 | 엘지전자 주식회사 | 로봇 청소기 |
| WO2017200349A1 (ko) | 2016-05-20 | 2017-11-23 | 엘지전자 주식회사 | 로봇 청소기 |
| CN106153059B (zh)* | 2016-07-01 | 2019-05-31 | 北京云迹科技有限公司 | 基于视觉标识对接充电装置的方法 |
| JP2018022010A (ja)* | 2016-08-03 | 2018-02-08 | 株式会社リコー | 電子機器 |
| JP7073336B2 (ja) | 2016-08-05 | 2022-05-23 | ロブアート ゲーエムベーハー | 自律移動ロボットを制御する方法 |
| CN106308685B (zh)* | 2016-08-23 | 2019-10-11 | 北京小米移动软件有限公司 | 清洁机器人及其控制方法 |
| CN107124014A (zh)* | 2016-12-30 | 2017-09-01 | 深圳市杉川机器人有限公司 | 一种移动机器人的充电方法及充电系统 |
| EP3974934A1 (de) | 2017-03-02 | 2022-03-30 | Robart GmbH | Verfahren zur steuerung eines autonomen, mobilen roboters |
| KR101984101B1 (ko)* | 2017-03-06 | 2019-05-30 | 엘지전자 주식회사 | 청소기 및 그 제어방법 |
| DE102017109219A1 (de) | 2017-04-28 | 2018-10-31 | RobArt GmbH | Verfahren für die Roboternavigation |
| DE102017207555A1 (de)* | 2017-05-05 | 2018-11-08 | Robert Bosch Gmbh | Einrichtung, Vorrichtung und Verfahren zum Betrieb von autonomen, mit Kleinladungsträgern beladbaren Transportfahrzeugen |
| CN106976086A (zh)* | 2017-05-10 | 2017-07-25 | 广东电网有限责任公司电力科学研究院 | 一种充电装置 |
| CN107392962A (zh)* | 2017-08-14 | 2017-11-24 | 深圳市思维树科技有限公司 | 一种基于图案识别的机器人充电对接系统和方法 |
| CN107539160A (zh)* | 2017-09-29 | 2018-01-05 | 深圳悉罗机器人有限公司 | 充电桩及其识别方法、智能移动机器人 |
| KR102450982B1 (ko)* | 2017-11-10 | 2022-10-05 | 삼성전자 주식회사 | 청소용 이동장치, 충전장치 및 그 제어방법 |
| CN110431504B (zh)* | 2017-11-16 | 2022-10-14 | 苏州宝时得电动工具有限公司 | 自移动设备工作系统及其控制方法 |
| CN107894770A (zh)* | 2017-11-24 | 2018-04-10 | 北京奇虎科技有限公司 | 机器人充电座、机器人的充电方法及装置 |
| US10575699B2 (en)* | 2018-01-05 | 2020-03-03 | Irobot Corporation | System for spot cleaning by a mobile robot |
| KR102203439B1 (ko)* | 2018-01-17 | 2021-01-14 | 엘지전자 주식회사 | 이동 로봇 및 이동 로봇의 제어방법 |
| CN110263601A (zh)* | 2018-03-12 | 2019-09-20 | 杭州萤石软件有限公司 | 一种充电座识别方法及移动机器人 |
| CN110389341B (zh)* | 2018-04-18 | 2021-06-25 | 深圳市优必选科技有限公司 | 充电桩识别方法、装置、机器人及计算机可读存储介质 |
| CN110412530B (zh)* | 2018-04-27 | 2021-09-17 | 深圳市优必选科技有限公司 | 一种识别充电桩的方法、装置及机器人 |
| CN110403527B (zh)* | 2018-04-27 | 2021-11-12 | 杭州萤石软件有限公司 | 一种设备控制系统、方法及支撑设备和移动机器人 |
| USD908993S1 (en)* | 2018-05-04 | 2021-01-26 | Irobot Corporation | Evacuation station |
| TWI660557B (zh) | 2018-06-01 | 2019-05-21 | 和碩聯合科技股份有限公司 | 充電座 |
| EP3584662B1 (en)* | 2018-06-19 | 2022-04-13 | Panasonic Intellectual Property Management Co., Ltd. | Mobile robot |
| TWI675528B (zh)* | 2018-06-28 | 2019-10-21 | 廣達電腦股份有限公司 | 便於回歸對位的機器人系統 |
| CN109066836B (zh)* | 2018-07-16 | 2021-09-21 | 深圳市无限动力发展有限公司 | 充电设备 |
| CN108988423A (zh)* | 2018-07-23 | 2018-12-11 | 深圳市银星智能科技股份有限公司 | 充电桩及其识别方法、智能移动装置、系统 |
| JP7332310B2 (ja)* | 2018-07-27 | 2023-08-23 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | 情報処理方法、情報処理装置及び情報処理プログラム |
| CN109129472B (zh)* | 2018-08-07 | 2021-12-21 | 北京云迹科技有限公司 | 基于多充电桩的机器人位置校正方法和装置 |
| CN110838144B (zh) | 2018-08-15 | 2022-09-30 | 杭州萤石软件有限公司 | 一种充电设备识别方法、移动机器人和充电设备识别系统 |
| CN110893085B (zh)* | 2018-09-11 | 2021-12-31 | 原相科技股份有限公司 | 清洁机器人及其充电路径决定方法 |
| CN109358616A (zh)* | 2018-09-12 | 2019-02-19 | 黄海宁 | 一种对自动导航物体位置坐标及方向偏差的校正方法 |
| CN109586360B (zh)* | 2018-11-09 | 2020-09-22 | 深圳市银星智能科技股份有限公司 | 一种机器人自动充电的方法、装置、充电桩和机器人 |
| CA3121163C (en) | 2018-11-28 | 2023-09-05 | Sharkninja Operating Llc | Optical beacon for autonomous device and autonomous device configured to use the same |
| CN113365535B (zh)* | 2018-12-03 | 2023-01-06 | 尚科宁家运营有限公司 | 用于向自主装置传送信息的光学标记 |
| TWI684426B (zh)* | 2018-12-19 | 2020-02-11 | 廣達電腦股份有限公司 | 吸塵掃地機系統 |
| CN109674402B (zh)* | 2019-01-04 | 2021-09-07 | 云鲸智能科技(东莞)有限公司 | 一种信息处理方法及相关设备 |
| CN109901588A (zh)* | 2019-03-27 | 2019-06-18 | 广州高新兴机器人有限公司 | 一种巡逻机器人使用的充电装置及自动充电方法 |
| CN110238850A (zh)* | 2019-06-13 | 2019-09-17 | 北京猎户星空科技有限公司 | 一种机器人控制方法及装置 |
| CN110412993B (zh)* | 2019-09-04 | 2023-03-21 | 上海飞科电器股份有限公司 | 自主充电的方法以及移动机器人 |
| CN110928307B (zh)* | 2019-12-10 | 2023-05-12 | 广东技术师范大学 | 基于红外激光的自动回充方法、系统、机器人及充电坞 |
| WO2021184781A1 (zh)* | 2020-03-17 | 2021-09-23 | 苏州宝时得电动工具有限公司 | 停靠站、机器人系统及机器人系统的控制方法 |
| CN111596857B (zh)* | 2020-05-15 | 2022-01-11 | 维沃移动通信有限公司 | 控制方法、装置及电子设备 |
| US11553824B2 (en)* | 2020-06-25 | 2023-01-17 | Power Logic Tech, Inc. | Automatic guiding method for self-propelled apparatus |
| KR20220003780A (ko)* | 2020-07-02 | 2022-01-11 | 엘지전자 주식회사 | 로봇 청소기용 충전장치 및 이를 이용한 로봇 청소기의 제어 방법 |
| CN114903373B (zh)* | 2021-02-08 | 2023-04-14 | 宁波方太厨具有限公司 | 一种清洁机器人返回基站的方法及清洁系统 |
| CN114343509A (zh)* | 2021-12-31 | 2022-04-15 | 上海仙途智能科技有限公司 | 无人洗地机补给站及无人洗地机系统 |
| CN119654096A (zh)* | 2022-07-22 | 2025-03-18 | 创科地板护理技术有限公司 | 表面清洁器 |
| TWM642252U (zh)* | 2022-11-17 | 2023-06-11 | 艾訊股份有限公司 | 精度量測套件 |
| DE102023201072B3 (de) | 2023-02-09 | 2024-07-25 | BSH Hausgeräte GmbH | Annäherung eines Bodenroboters an eine Basisstation |
| CN119225351A (zh)* | 2023-06-27 | 2024-12-31 | 速感科技(北京)有限公司 | 智能系统、自主移动设备的控制方法和存储介质 |
| GB2631326B (en)* | 2023-10-20 | 2025-07-16 | Dexory Ltd | Autonomous robot |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012221490A (ja) | 2011-04-11 | 2012-11-12 | Micro-Star Internatl Co Ltd | 掃除ロボット制御システム |
| KR101198773B1 (ko) | 2008-01-23 | 2012-11-12 | 삼성전자주식회사 | 로봇청소기 시스템의 복귀 방법 |
| US20120323365A1 (en) | 2011-06-17 | 2012-12-20 | Microsoft Corporation | Docking process for recharging an autonomous mobile device |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5995884A (en)* | 1997-03-07 | 1999-11-30 | Allen; Timothy P. | Computer peripheral floor cleaning system and navigation method |
| DE69821659T2 (de)* | 1997-11-27 | 2004-12-16 | Solar And Robotics S.A. | Reinigungsroboter |
| AU767561B2 (en)* | 2001-04-18 | 2003-11-13 | Samsung Kwangju Electronics Co., Ltd. | Robot cleaner, system employing the same and method for reconnecting to external recharging device |
| KR100468107B1 (ko)* | 2002-10-31 | 2005-01-26 | 삼성광주전자 주식회사 | 외부충전장치를 갖는 로봇청소기 시스템 및 로봇청소기의외부충전장치 접속방법 |
| KR20040079055A (ko)* | 2003-03-06 | 2004-09-14 | 삼성광주전자 주식회사 | 외부충전장치를 갖는 로봇청소기 시스템 |
| CN1783114A (zh)* | 2004-11-30 | 2006-06-07 | 周志艳 | 用于治理物品乱架的特种条码、其专用标签及使用方法 |
| KR100696134B1 (ko)* | 2005-04-25 | 2007-03-22 | 엘지전자 주식회사 | 이동로봇의 위치 산출 시스템과 그를 이용한 충전대 복귀시스템 및 그 방법 |
| KR100735565B1 (ko)* | 2006-05-17 | 2007-07-04 | 삼성전자주식회사 | 구조광을 이용한 물체 검출 방법 및 이를 이용한 로봇 |
| CN101211186B (zh)* | 2006-12-29 | 2010-12-08 | 财团法人工业技术研究院 | 可动装置回服务站的方法以及可动装置服务系统 |
| NL1033591C2 (nl)* | 2007-03-26 | 2008-09-29 | Maasland Nv | Onbemand voertuig voor het verplaatsen van mest. |
| US7909468B2 (en)* | 2007-05-04 | 2011-03-22 | Beverly Lloyd | Display device and method |
| JP5381833B2 (ja)* | 2009-07-31 | 2014-01-08 | セイコーエプソン株式会社 | 光学式位置検出装置および位置検出機能付き表示装置 |
| CN102262407B (zh)* | 2010-05-31 | 2016-08-03 | 恩斯迈电子(深圳)有限公司 | 引导装置及操作系统 |
| KR101318071B1 (ko)* | 2010-08-18 | 2013-10-15 | 주식회사 에스원 | 이동 디바이스 및 그 구동 방법 |
| CN201936191U (zh)* | 2011-01-26 | 2011-08-17 | 宋红丽 | 保洁机器人 |
| CN102298388B (zh)* | 2011-08-22 | 2012-12-19 | 深圳市银星智能科技股份有限公司 | 一种用于移动机器人的制约系统 |
- 2013
- 2013-10-31KRKR1020130131623Apatent/KR102095817B1/koactiveActive
- 2014
- 2014-10-31CNCN201410602263.XApatent/CN104586320B/zhactiveActive
- 2014-10-31CNCN201710351874.5Apatent/CN107260069B/zhactiveActive
- 2014-10-31USUS14/529,774patent/US20150115876A1/ennot_activeAbandoned
- 2014-10-31CNCN201710351858.6Apatent/CN107297755B/zhactiveActive
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101198773B1 (ko) | 2008-01-23 | 2012-11-12 | 삼성전자주식회사 | 로봇청소기 시스템의 복귀 방법 |
| JP2012221490A (ja) | 2011-04-11 | 2012-11-12 | Micro-Star Internatl Co Ltd | 掃除ロボット制御システム |
| US20120323365A1 (en) | 2011-06-17 | 2012-12-20 | Microsoft Corporation | Docking process for recharging an autonomous mobile device |
Also Published As
| Publication number | Publication date |
|---|---|
| CN104586320B (zh) | 2017-06-20 |
| CN107297755B (zh) | 2020-09-25 |
| CN104586320A (zh) | 2015-05-06 |
| US20150115876A1 (en) | 2015-04-30 |
| CN107260069A (zh) | 2017-10-20 |
| CN107260069B (zh) | 2020-11-17 |
| KR20150050161A (ko) | 2015-05-08 |
| CN107297755A (zh) | 2017-10-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102095817B1 (ko) | 이동 로봇, 이동 로봇의 충전대 및 이들을 포함하는 이동 로봇 시스템 | |
| KR102093177B1 (ko) | 이동 로봇 및 그 동작방법 | |
| KR102152641B1 (ko) | 이동 로봇 | |
| EP3104194B1 (en) | Robot positioning system | |
| EP2677386B1 (en) | Robot cleaner and obstacle detection control method of the same | |
| KR101813922B1 (ko) | 로봇 청소기 및 이의 제어 방법 | |
| KR101677634B1 (ko) | 로봇 청소기 및 이의 제어 방법 | |
| KR20120044768A (ko) | 로봇 청소기 및 이의 제어 방법 | |
| KR101951414B1 (ko) | 로봇 청소기 및 이의 제어 방법 | |
| KR101943359B1 (ko) | 로봇 청소기 및 이의 제어 방법 | |
| KR101895314B1 (ko) | 로봇 청소기 및 이의 제어 방법 | |
| KR20110085500A (ko) | 로봇 청소기 및 이의 제어 방법 | |
| KR20160090278A (ko) | 이동 로봇 및 이의 제어 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application | St.27 status event code:A-0-1-A10-A12-nap-PA0109 | |
| PG1501 | Laying open of application | St.27 status event code:A-1-1-Q10-Q12-nap-PG1501 | |
| PN2301 | Change of applicant | St.27 status event code:A-3-3-R10-R13-asn-PN2301 St.27 status event code:A-3-3-R10-R11-asn-PN2301 | |
| A201 | Request for examination | ||
| P11-X000 | Amendment of application requested | St.27 status event code:A-2-2-P10-P11-nap-X000 | |
| P13-X000 | Application amended | St.27 status event code:A-2-2-P10-P13-nap-X000 | |
| PA0201 | Request for examination | St.27 status event code:A-1-2-D10-D11-exm-PA0201 | |
| D13-X000 | Search requested | St.27 status event code:A-1-2-D10-D13-srh-X000 | |
| D14-X000 | Search report completed | St.27 status event code:A-1-2-D10-D14-srh-X000 | |
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection | St.27 status event code:A-1-2-D10-D21-exm-PE0902 | |
| P11-X000 | Amendment of application requested | St.27 status event code:A-2-2-P10-P11-nap-X000 | |
| P13-X000 | Application amended | St.27 status event code:A-2-2-P10-P13-nap-X000 | |
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration | St.27 status event code:A-1-2-D10-D22-exm-PE0701 | |
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment | St.27 status event code:A-2-4-F10-F11-exm-PR0701 | |
| PR1002 | Payment of registration fee | St.27 status event code:A-2-2-U10-U11-oth-PR1002 Fee payment year number:1 | |
| PG1601 | Publication of registration | St.27 status event code:A-4-4-Q10-Q13-nap-PG1601 | |
| PN2301 | Change of applicant | St.27 status event code:A-5-5-R10-R13-asn-PN2301 St.27 status event code:A-5-5-R10-R11-asn-PN2301 | |
| PR1001 | Payment of annual fee | St.27 status event code:A-4-4-U10-U11-oth-PR1001 Fee payment year number:4 | |
| P22-X000 | Classification modified | St.27 status event code:A-4-4-P10-P22-nap-X000 | |
| PR1001 | Payment of annual fee | St.27 status event code:A-4-4-U10-U11-oth-PR1001 Fee payment year number:5 | |
| P22-X000 | Classification modified | St.27 status event code:A-4-4-P10-P22-nap-X000 | |
| P22-X000 | Classification modified | St.27 status event code:A-4-4-P10-P22-nap-X000 |