KR101954283B1 - System and method for evaluating atmospheric conditions using long-range surveillance radar - Google Patents
System and method for evaluating atmospheric conditions using long-range surveillance radarDownload PDFInfo
- Publication number
- KR101954283B1 KR101954283B1KR1020170025115AKR20170025115AKR101954283B1KR 101954283 B1KR101954283 B1KR 101954283B1KR 1020170025115 AKR1020170025115 AKR 1020170025115AKR 20170025115 AKR20170025115 AKR 20170025115AKR 101954283 B1KR101954283 B1KR 101954283B1
- Authority
- KR
- South Korea
- Prior art keywords
- evaluation
- range
- signal
- atmospheric
- atmosphere
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01W—METEOROLOGY
- G01W1/00—Meteorology
- G01W1/08—Adaptations of balloons, missiles, or aircraft for meteorological purposes; Radiosondes
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/87—Combinations of radar systems, e.g. primary radar and secondary radar
- G01S13/872—Combinations of primary radar and secondary radar
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/95—Radar or analogous systems specially adapted for specific applications for meteorological use
- G01S13/951—Radar or analogous systems specially adapted for specific applications for meteorological use ground based
- G—PHYSICS
- G01—MEASURING; TESTING
- G01W—METEOROLOGY
- G01W2201/00—Weather detection, monitoring or forecasting for establishing the amount of global warming
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- Environmental & Geological Engineering (AREA)
- Electromagnetism (AREA)
- Aviation & Aerospace Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Atmospheric Sciences (AREA)
- Biodiversity & Conservation Biology (AREA)
- Ecology (AREA)
- Environmental Sciences (AREA)
- Radar Systems Or Details Thereof (AREA)
Abstract
Translated fromKoreanDescription
Translated fromKorean본 발명은 장거리 탐지 레이다를 이용한 대기평가 시스템 및 방법에 관한 것이다.The present invention relates to a system and method for atmospheric assessment using a long range detection radar.
장거리 탐지 레이다는 항적관리, 감시, 정찰 등 다양한 분야에서 활용되고 있다.Long range detection radar is used in various fields such as navigation, surveillance, and reconnaissance.
특히 민수 분야의 관제용 레이다와 군수 분야의 다기능 레이다의 경우 높은 탐지 정확도가 요구된다. 레이다 시스템의 탐지 정확도는 신호가 전달되는 환경에 영향을 받는데, 신호가 전달되는 환경과 관련된 요소들은 간섭 및 편파의 변화, 대기의 가스나 수증기에 의한 감쇄와 온도, 습도, 기압에 따른 대기 굴절률 변화에 의한 전파의 굴절 등이 있다.Especially, high detection accuracy is required for control radar in civilian field and multifunctional radar in military field. The detection accuracy of the radar system is affected by the environment in which the signal is transmitted. The factors related to the environment in which the signal is transmitted are interference and polarization changes, attenuation due to atmospheric gas or water vapor, and atmospheric refractive index change And the like.
고도에 따른 오차를 보정하고 대기환경에 의한 굴절률을 반영하기 위해 일반적으로 고도에 따른 굴절률 변화가 일정한 표준대기 모델이 사용되나 이는 시간과 공간에 따른 대기환경을 반영하기는 어렵다.In order to compensate the altitude error and reflect the refractive index due to the atmospheric environment, a standard atmospheric model with a constant change in refractive index according to altitude is used, but it is difficult to reflect the atmospheric environment depending on time and space.
한편, 공간과 시간에 따른 대기환경을 반영하기 위해 지면에서 측정한 온도, 습도 기압을 이용하여 얻은 굴절률로부터 고도에 따른 굴절 변화율을 지수 함수로 예측하는 다양한 지수 함수 모델들이 연구되었으나 온도, 습도, 기압 등을 측정하는 시설이 설치된 지역에 한정되어 적용되며 해상 위 등에서는 온도, 습도, 기압 등을 측정할 수 없는 공간적 제약이 있다.Various exponential function models have been investigated to predict the refraction index according to altitude from the refractive index obtained by using temperature and humidity pressure measured at the ground level in order to reflect the air environment according to space and time. Temperature, humidity, , And there is a spatial restriction that can not measure temperature, humidity, air pressure, etc. at sea level.
본 발명이 해결하고자 하는 기술적 과제는 장거리 탐지 레이다 항적의 통계적 분석을 통하여 시간과 공간적 제약에 대하여 자유로운 대기상태정보를 제공할 수 있는 장거리 탐지 레이다를 이용한 대기평가 시스템 및 방법을 제공하는 것이다.SUMMARY OF THE INVENTION It is an object of the present invention to provide a standby evaluation system and method using a long-range detection radar capable of providing free standby state information on time and space constraints through statistical analysis of long-distance detection radar wake.
상기의 기술적 과제를 해결하기 위해 본 발명의 일실시예에 의한 장거리 탐지 레이다를 이용한 대기평가 시스템은 탐지 신호를 송신하고, 비행체로부터 반사되는 반사 신호를 수신하는 1차 감시 레이다(PSR: Primary Surveillance Radar); 상기 비행체로부터 송신되는 위치 정보를 포함하는 응답 신호를 수신하는 2차 감시 레이다(SSR: Secondary Surveillance Radar); 상기 반사 신호 및 상기 위치 정보를 저장하는 저장부; 및 상기 반사 신호 및 상기 위치 정보를 이용하여 대기상태정보를 생성하는 제어부;를 포함할 수 있다.According to an aspect of the present invention, there is provided a standby evaluation system using a long-range detection radar, including a primary surveillance radar (PSR) for transmitting a detection signal and receiving a reflection signal reflected from the aircraft, ); A secondary surveillance radar (SSR) for receiving a response signal including position information transmitted from the air vehicle; A storage unit for storing the reflection signal and the position information; And a control unit for generating wait state information using the reflection signal and the position information.
본 발명의 일실시예에서, 상기 제어부는 상기 반사 신호 및 상기 위치 정보에 의하여 각각 결정되는 고도의 차이인 고도오차를 이용하여 상기 대기상태정보를 생성할 수 있다.In an embodiment of the present invention, the control unit may generate the wait state information using an altitude error, which is a difference in altitude, which is determined by the reflection signal and the position information, respectively.
본 발명의 일실시예에서, 상기 저장부는 위치의 범위인 평가범위를 저장하고, 상기 제어부는 상기 반사 신호 및 상기 위치 정보에 의하여 각각 결정되는 고도의 차이인 고도오차에 대한 평균값을 포함하는 상기 대기상태정보를 생성하되, 상기 평가범위 내에서 상기 평균값을 산출할 수 있다.In one embodiment of the present invention, the storage unit stores an evaluation range which is a range of positions, and the control unit controls the at least one of the atmospheric pressure, the atmospheric pressure, The state information is generated, and the average value can be calculated within the evaluation range.
본 발명의 일실시예에서, 상기 저장부는 임계값을 저장하고, 상기 제어부는 상기 평가범위 내에서 상기 고도오차의 표준편차를 상기 임계값과 비교하고 상기 평가범위를 조정하여 상기 평균값을 재산출할 수 있다.In one embodiment of the present invention, the storage unit stores a threshold value, and the control unit compares the standard deviation of the altitude error with the threshold value within the evaluation range, and adjusts the evaluation range so that the average value can be restored have.
또한, 상기의 기술적 과제를 해결하기 위해 본 발명의 일실시예에 의한 장거리 탐지 레이다를 이용한 대기평가 방법은 탐지 신호를 송신하는 단계; 상기 탐지 신호에 대한 비행체의 반사 신호를 수신하는 단계; 상기 비행체로부터 송신되는 위치 정보를 포함하는 응답 신호를 수신하는 단계; 및 상기 반사 신호 및 상기 위치 정보를 이용하여 대기상태정보를 생성하는 단계;를 포함할 수 있다.According to another aspect of the present invention, there is provided a method for evaluating atmospheric air using a long-range detection radar, including the steps of: transmitting a detection signal; Receiving a reflection signal of the airplane with respect to the detection signal; Receiving a response signal including positional information transmitted from the air vehicle; And generating the wait state information using the reflection signal and the position information.
본 발명의 일실시예에서, 상기 반사 신호 및 상기 위치 정보에 의하여 각각 결정되는 고도의 차이인 고도오차를 산출하는 단계;를 더 포함하고, 상기 대기상태정보는 상기 고도오차를 이용하여 생성될 수 있다.In one embodiment of the present invention, the method further comprises calculating an altitude error, which is altitude difference, which is respectively determined by the reflection signal and the position information, and the atmospheric state information may be generated using the altitude error have.
본 발명의 일실시예에서, 위치의 범위인 평가범위를 설정하는 단계; 상기 반사 신호 및 상기 위치 정보에 의하여 각각 결정되는 고도의 차이인 고도오차를 산출하는 단계; 및 상기 평가범위 내에서 상기 고도오차에 대한 평균값을 산출하는 단계;를 더 포함하고, 상기 대기상태정보는 상기 평균값을 포함할 수 있다.In one embodiment of the present invention, there is provided a method of evaluating a position, comprising: setting an evaluation range that is a range of positions; Calculating an altitude error, which is an altitude difference determined by the reflection signal and the position information, respectively; And calculating an average value for the altitude error within the evaluation range, and the atmospheric state information may include the average value.
본 발명의 일실시예에서, 임계값을 설정하는 단계; 상기 평가범위 내에서 상기 고도오차의 표준편차를 상기 임계값과 비교하는 단계; 및 상기 평가범위를 조정하여 상기 평균값을 재산출하는 단계;를 더 포함할 수 있다.In one embodiment of the present invention, there is provided a method comprising: setting a threshold; Comparing the standard deviation of the altitude error with the threshold value within the evaluation range; And adjusting the evaluation range to ship the average value.
본 발명은 시간과 공간적 제약에 대하여 자유로운 대기상태정보를 제공할 수 있는 효과가 있다.The present invention has the effect of providing free state information about time and space constraints.
도 1은 본 발명의 일실시예에 의한 장거리 탐지 레이다를 이용한 대기평가 시스템을 나타낸 도면이다.
도 2는 본 발명의 일실시예에 의한 장거리 탐지 레이다를 이용한 대기평가 방법을 나타낸 순서도이다.
도 3은 본 발명의 일실시예에 의한 대기 평가 함수의 위치에 따른 평가범위를 나타낸 도면이다.
도 4는 본 발명의 일실시예에 의한 대기 평가 함수를 적용한 예시를 나타난 도면이다.
도 5 본 발명의 일실시예에 의한 대기 평가 함수를 적용한 예시를 나타난 도면이다.1 is a diagram illustrating a waiting evaluation system using a long-range detection radar according to an embodiment of the present invention.
2 is a flowchart illustrating a waiting evaluation method using a long-range detection radar according to an embodiment of the present invention.
3 is a diagram showing an evaluation range according to a position of a waiting evaluation function according to an embodiment of the present invention.
4 is a diagram showing an example of applying a waiting evaluation function according to an embodiment of the present invention.
5 is a diagram showing an example in which a waiting evaluation function according to an embodiment of the present invention is applied.
본 발명은 다양한 변환을 가할 수 있고 여러 가지 실시예를 가질 수 있는 바, 특정 실시예들을 도면에 예시하고 상세한 설명에 상세하게 설명하고자 한다. 그러나, 이는 본 발명을 특정한 실시 형태에 대해 한정하려는 것이 아니며, 본 발명의 사상 및 기술 범위에 포함되는 모든 변환, 균등물 내지 대체물을 포함하는 것으로 이해되어야 한다.BRIEF DESCRIPTION OF THE DRAWINGS The present invention is capable of various modifications and various embodiments, and specific embodiments are illustrated in the drawings and described in detail in the detailed description. It is to be understood, however, that the invention is not to be limited to the specific embodiments, but includes all modifications, equivalents, and alternatives falling within the spirit and scope of the invention.
본 발명을 설명함에 있어서 관련된 공지 기술에 대한 구체적인 설명이 본 발명의 요지를 흐릴 수 있다고 판단되는 경우 그 상세한 설명을 생략한다.DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTS Hereinafter, the present invention will be described in detail with reference to the accompanying drawings.
이하, 본 발명의 실시예를 첨부한 도면들을 참조하여 상세히 설명하기로 한다.Hereinafter, embodiments of the present invention will be described in detail with reference to the accompanying drawings.
도 1은 본 발명의 일실시예에 의한 장거리 탐지 레이다를 이용한 대기평가 시스템을 나타낸 도면이다.1 is a diagram illustrating a waiting evaluation system using a long-range detection radar according to an embodiment of the present invention.
도 1을 참조하면, 본 발명의 일실시예에 의한 장거리 탐지 레이다를 이용한 대기평가 시스템은 1차 감시 레이다(110), 2차 감시 레이다(120), 저장부(130) 및 제어부(140)를 포함할 수 있다.1, a waiting evaluation system using a long-range detection radar according to an embodiment of the present invention includes a
1차 감시 레이다(110)(PSR: Primary Surveillance Radar)는 탐지 범위 내에 존재하는 비행체(200)를 탐지하기 위하여 탐지 신호를 송신할 수 있다. 이 탐지 신호는 비행체(200)로부터 반사될 수 있으므로 1차 감시 레이다(110)는 반사 신호를 수신할 수 있다.The
비행체(200)의 위치는 제어부(140)에 의하여 산출될 수 있으며, 그 위치는 1차 감시 레이다(110)의 조향각과 탐지 신호와 반사 신호의 시간차를 통하여 산출될 수 있다.The position of the
탐지 신호는 대기의 상태에 따라 전파시 굴절되는 정도가 달라지기 때문에 탐지 신호 및 반사 신호로부터 산출되는 고도에는 오차가 발생할 수 있다. 아굴절(Sub-refraction) 대기에서는 신호가 표준대기에서보다 높은 고도로 전달되고, 초굴절(Super refraction) 대기에서는 신호가 표준대기에서보다 낮은 고도로 전달된다. 그 결과 실제 비행체(200)의 위치와 탐지되는 위치(201)는 고도에 차이를 가질 수 있다. 예를 들어, 아굴절 대기에서는 탐지되는 위치(201)가 실제 비행체(200)의 위치보다 낮게 되고, 초굴절 대기에서는 탐지되는 위치(201)가 실제 비행체(200)의 위치보다 높게 된다.Since the degree of refraction of the detection signal varies depending on the state of the atmosphere, an error may occur in the altitude calculated from the detection signal and the reflection signal. In the sub-refraction atmosphere, signals are delivered at higher altitudes in standard atmospheres, and in super refraction atmospheres, signals are delivered at lower altitudes in standard atmospheres. As a result, the position of the
도 1에 도시된 탐지 신호의 전달경로는 아굴절 대기에서의 전달경로을 나타낸 것이다.The propagation path of the detection signal shown in FIG. 1 is a propagation path in the sub refraction atmosphere.
2차 감시 레이다(120)(SSR: Secondary Surveillance Radar)는 비행체(200)로부터 송신되는 응답 신호를 수신할 수 있다.Secondary surveillance radar (SSR) 120 can receive a response signal transmitted from the
응답 신호는 비행체(200)가 특정 신호에 대응하여 시스템 측으로 송신하는 위치 정보를 포함하는 신호일 수 있다. 응답 신호에는 비행체(200)의 식별기호, 비행고도, 거리, 방향, 비상신호 등의 정보가 포함될 수 있다.The response signal may be a signal including positional information that the
제어부(140)는 위치 정보를 이용하여 비행체(200)의 고도를 포함한 위치를 산출할 수 있다.The
2차 감시 레이다(120)가 수신하는 위치 정보는 비행체(200)가 직접 비행체(200)의 위치에 관한 정보를 전달하는 것이기 때문에 1차 감시 레이다(110)에 의한 항적에 비하여 고도에 대한 오차가 작을 수 있다.Since the position information received by the
저장부(130)는 반사 신호 및 응답 신호에 관한 정보를 저장할 수 있다. 저장부(130)는 위치의 범위인 평가범위를 저장하고, 임계값을 저장할 수도 있다.The
평가범위 및 임계값은 사용자 인터페이스(User Interface)를 통하여 입력될 수 있다.The evaluation range and the threshold value can be input through a user interface.
제어부(140)는 1차 감시 레이다(110), 2차 감시 레이다(120) 및 저장부(130)와 연결되며 이들을 제어할 수 있다.The
제어부(140)는 반사 신호 및 위치 정보를 이용하여 대기상태정보를 생성할 수 있다. 제어부(140)가 생성하는 대기상태정보에는 대기평가함수가 포함될 수 있다.The
본 발명의 일실시예에서, 대기평가함수는 위치의 함수이며 그 위치에서의 반사 신호 및 위치 정보에 의하여 각각 결정되는 고도의 차이인 고도오차를 이용한 함수이다.In one embodiment of the present invention, the atmospheric evaluation function is a function of position and a function using an altitude error which is a difference in altitude, which is determined by the reflected signal and the position information, respectively.
제어부(140)는 특정 위치에서 저장된 평가범위 내의 저장부(130)에 존재하는 모든 신호에 대하여 고도오차의 평균값을 산출할 수 있다. 제어부(140)는 이렇게 위치마다 각각 산출한 고도오차의 평균값에 의하여 대기평가함수로 생성할 수 있다.The
도 3은 본 발명의 일실시예에 의한 대기평가함수의 위치에 따른 평가범위를 나타낸 도면이다.3 is a diagram showing an evaluation range according to a position of a waiting evaluation function according to an embodiment of the present invention.
도 3에서, 원점에 본 발명의 일실시예에 의한 시스템이 있는 것으로 가정할 수 있다. 대기평가함수는 시스템으로부터 수평거리 r 및 방위각 φ을 변수로 하는 위치의 함수이다.In FIG. 3, it can be assumed that there is a system according to an embodiment of the present invention at the origin. The atmospheric evaluation function is a function of the position with the horizontal distance r and azimuth angle φ as variables.
위치 (r, φ)에서의 평가범위는 Δrw과 Δφw로 설정될 수 있다.Evaluation range in the position (r, φ) can be set at Δr Δφw andw.
hPSR(ri, φi)은 (ri, φi)에서 반사 신호로부터 결정된 고도를 의미하며, hSSR(ri, φi)은 (ri, φi)에서의 위치 정보로부터 결정된 고도를 의미할 수 있다. 인덱스 i는 평가범위 내 존재하는 서로 다른 위치에 대한 데이터를 구분하기 위하여 사용되었다.hPSR (ri, φi) refers to the height determined from the reflected signals from the (ri, φi),and, h SSR (r i, φ i) is determined from the position information in the (ri, φi) It can mean altitude. The index i is used to distinguish data for different positions that exist within the evaluation range.
hSSR(ri, φi)은 비행체(200)로부터 수신되는 응답 신호에 포함된 위치 정보로부터 결정될 수 있는 고도이며, 실제 비행체(200)의 고도와 오차가 없는 것으로 가정할 수 있다. 고도오차는 반사 신호로부터 결정될 수 있는 hPSR(ri, φi)에서 발생하는 것으로 설정할 수 있다.hSSR (ri , φi ) is an altitude that can be determined from the position information included in the response signal received from the
대기평가함수를 AEM(r, φ)로 표시할 때, 대기평가함수는 다음 [수학식 1]과 같이 계산될 수 있다.When the atmospheric evaluation function is expressed as AEM (r,?), The atmospheric evaluation function can be calculated as shown in the following equation (1).

여기서, N은 평가범위 Δrw과 Δφw 내에 존재하는 (r, φ)에 관한 데이터 쌍의 수를 의미한다.Here, N is the number of data pairs on the (r, φ) existing in Δrw and Δφw rating range.
제어부(140)는 평가범위에서의 고도오차에 대한 표준편차를 계산하고, 임계값과 비교할 수 있다. 제어부(140)는 표준편차가 임계값을 초과하는 경우 평가범위를 조정할 수 있다. 예를 들어, 제어부(140)는 평가범위에 대하여 수평거리의 범위 Δrw와 방위각의 범위 Δφw의 크기를 각각 1/2로 조정할 수 있다. 예를 들어, 제어부(140)는 수평거리의 범위 Δrw와 방위각의 범위 Δφw의 크기를 표준편차의 크기에 비례하도록 조정할 수도 있다. 평가범위를 조정하는 것은 미리 설정된 평가범위에서 표준편차가 지나치게 클 경우 그 영역을 좀 더 세밀하게 분석하기 위함이다.The
대기평가함수의 크기가 ±2 kft 범위의 값을 가질 때에는 표준대기로 평가할 수 있다. AEM(r, φ) < -2 kft인 경우에는 아굴절 대기로, AEM(r, φ) > 2 kft인 경우에는 초굴절 대기로 평가될 수 있다.When the size of the atmospheric evaluation function has a value in the range of ± 2 kft, it can be evaluated as a standard atmosphere. In the case of AEM (r, φ) <2 kft, it can be evaluated as subepithelial atmosphere, and in case of AEM (r, φ)> 2 kft, it can be evaluated as subepithelial atmosphere.
도 2는 본 발명의 일실시예에 의한 장거리 탐지 레이다를 이용한 대기평가 방법을 나타낸 순서도이다.2 is a flowchart illustrating a waiting evaluation method using a long-range detection radar according to an embodiment of the present invention.
도 2에 의한 장거리 탐지 레이다를 이용한 대기평가 방법은 장거리 탐지 레이다를 이용한 대기평가 시스템에 의하여 수행될 수 있다. 본 발명의 일실시예에서는 장거리 탐지 레이다를 이용한 대기평가 시스템에 의하여 장거리 탐지 레이다를 이용한 대기평가 방법이 수행되는 것을 예시하기로 한다.The atmospheric evaluation method using the long-range detection radar according to FIG. 2 can be performed by the atmospheric evaluation system using the long-range detection radar. In an embodiment of the present invention, the atmospheric evaluation method using the long-range detection radar is performed by the atmospheric evaluation system using the long-range detection radar.
도 2를 참조하면, S201단계에서, 제어부(140)는 탐지 신호를 송신할 수 있다. 제어부(140)는 1차 감시 레이다(110)에 제어 신호를 전달하여 1차 감시 레이다(110)가 탐지 신호를 송신할 수 있도록 할 수 있다.Referring to FIG. 2, in step S201, the
S203단계에서, 1차 감시 레이다(110)는 반사 신호를 수신할 수 있다. 1차 감시 레이다(110)는 반사 신호를 수신하여 제어부(140)에 전달할 수 있다.In step S203, the
S205단계에서, 2차 감시 레이다(120)는 비행체(200)의 위치정보를 포함하는 응답 신호를 수신할 수 있다. 응답 신호는 1차 감시 레이다(110)의 신호를 반사한 비행체(200)로부터 장거리 탐지 레이다를 이용한 대기평가 시스템의 요청에 대응하여 송신한 신호일 수 있다.In step S205, the
수신된 반사 신호 및 응답 신호는 짝을 이루어 저장부(130)에 저장될 수 있다.The received reflection signal and the response signal may be stored in the
S207단계에서, 제어부(140)는 신호를 샘플링할 수 있다. 예를 들어, 제어부(140)는 현재 시각으로부터 1시간 이전의 신호들을 샘플링할 수 있다. 제어부(140)는 샘플링된 반사 신호 및 응답 신호를 대기평가함수를 생성하는 데 사용할 수 있다.In step S207, the
S209단계에서, 제어부(140)는 고도오차의 평균값을 산출할 수 있다. 제어부(140)는 [수학식 1]에 의하여 고도오차의 평균값을 산출할 수 있다. 제어부(140)는 어느 하나의 위치에 대하여 평가범위 내 고도오차의 평균값을 산출할 수 있다.In step S209, the
S211단계에서, 제어부(140)는 평가범위 내 고도오차의 표준편차가 기설정된 임계값을 초과하는 지 여부를 판단할 수 있다. 표준편차가 임계값을 초과하는 경우 S213단계로 진행하고, 초과하지 않는 경우 S215단계로 진행한다.In step S211, the
S213단계에서, 제어부(140)는 평가범위를 조정하여 평균값을 재산출할 수 있다. 제어부(140)는 표준편차가 임계값보다 크다면 평가범위를 보다 작게 조정할 수 있다.In step S213, the
S215단계에서, 제어부(140)는 샘플링 된 신호에 대하여 모든 위치에 대한 평균값이 산출되었는지 여부를 판단한다. 모든 위치에 대한 평균값이 산출되지 않았다면 S209단계로 되돌아가서 다른 위치에 대한 평균값을 산출하고, 모든 위치에 대한 평균값이 산출되었다면 S217단계로 진행한다.In step S215, the
S217단계에서, 제어부(140)는 갱신조건을 만족하는 지 여부를 판단할 수 있다. 갱신조건을 만족하는 경우 S207단계로 되돌아가고, 만족하지 않는 경우 S219단계로 진행한다.In step S217, the
본 발명의 일실시예에서, 갱신조건이란 대기평가함수를 새롭게 업데이트된 반사 신호 및 위치 정보를 이용하여 생성하도록 하는 조건을 의미한다. 갱신조건은 시간이 흐르거나 주변환경의 영향으로 평가대상이 되는 대기상태가 달라지는 경우를 고려하여 설정될 수 있는 것이다.In one embodiment of the present invention, the update condition means a condition for generating a wait evaluation function using a newly updated reflection signal and position information. The update condition may be set in consideration of the case where the wait state that is the subject of evaluation changes due to the passage of time or the influence of the surrounding environment.
저장부(130)에는 갱신조건이 저장될 수 있다. 갱신조건은 사용자 인터페이스를 통하여 사용자에 의하여 입력될 수 있다.The
예를 들어, 대기평가함수를 생성한 후 1시간이 경과된 경우를 갱신조건으로 설정할 수 있다.For example, a case where one hour has elapsed after the waiting evaluation function is generated can be set as an update condition.
S219단계에서, 제어부(140)는 1차 감시 레이다(110)를 이용하여 비행체(200)의 위치를 탐지할 수 있다. 제어부(140)는 1차 감시 레이다(110)에서 탐지 신호를 송신하고, 비행체(200)로부터 반사된 반사 신호를 수신하고, 반사 신호로부터 결정될 수 있는 위치를 대기평가함수로부터 보정하여 비행체(200)의 위치를 결정할 수 있다. 이러한 보정은 반사 신호로부터 결정되는 위치의 고도값에서 대기평가함수에 의한 고도오차를 차감하는 방식으로 수행될 수 있다. 상기 보정은 반사 신호로부터 결정되는 위치의 고도 값에 대기평가함수로부터 유도될 수 있는 위치에 따른 가중치를 곱하여 수행될 수도 있다.In step S219, the
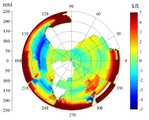
도 4는 본 발명의 일실시예에 의한 대기평가함수를 적용한 예시를 나타난 도면이다.4 is a diagram showing an example of applying a waiting evaluation function according to an embodiment of the present invention.
도 4에서 도시된 대기평가함수의 분포는 2015년 7월 17일 기준 반경 250 nmi 영역에서의 탐지 신호 및 응답 신호를 이용하여 생성한 대기평가함수에 관한 것이다.The distribution of the atmospheric evaluation function shown in FIG. 4 is related to the atmospheric evaluation function generated using the detection signal and the response signal in the
대기평가함수는 수평거리 250 nmi, 방위각 101도에서 10.2 kft로 최댓값을 가지며, 수평거리 212 nmi, 방위각 298도에서 -6.2 kft로 최솟값을 가진다. 대기평가함수의 분포로부터 청색 농도가 짙은 곳에서는 아굴절, 적색 농도가 짙은 곳에서는 초굴절이 발생하는 것을 알 수 있다.The atmospheric evaluation function has a maximum value of 10.2 kft at a horizontal distance of 250 nmi, an azimuth angle of 101 degrees and a minimum value of -2.2 kft at a horizontal distance of 212 nmi and an azimuth angle of 298 degrees. From the distribution of the atmospheric evaluation function, it can be seen that the sub-refraction occurs in the place where the blue color density is high, and in the place where the red color density is dark.
도 5 본 발명의 일실시예에 의한 대기평가함수를 적용한 예시를 나타난 도면이다.5 is a diagram showing an example in which a waiting evaluation function according to an embodiment of the present invention is applied.
도 5에서 도시된 대기평가함수의 분포는 2015년 6월 10일 기준 반경 250 nmi 영역에서의 탐시 신호 및 응답 신호를 이용하여 생성한 대기평가함수에 관한 것이다.The distribution of the atmospheric evaluation function shown in FIG. 5 relates to the atmospheric evaluation function generated using the detection signal and the response signal in the
대기평가함수는 수평거리 242 nmi, 방위각 319도에서 10.2 kft로 최댓값을 가지며, 수평거리 170 nmi, 방위각 223도에서 -8.3 kft로 최솟값을 가진다. 대기평가함수의 분포로부터 청색 농도가 짙은 곳에서는 아굴절, 적색 농도가 짙은 곳에서는 초굴절이 발생하는 것을 알 수 있다.The atmospheric evaluation function has a maximum value of 10.2 kft at a horizontal distance of 242 nmi, an azimuth angle of 319 degrees and a minimum value of -8.3 kft at a horizontal distance of 170 nmi and an azimuth angle of 223 degrees. From the distribution of the atmospheric evaluation function, it can be seen that the sub-refraction occurs in the place where the blue color density is high, and in the place where the red color density is dark.
본 출원에서 사용한 용어는 단지 특정한 실시예를 설명하기 위해 사용된 것으로, 본 발명을 한정하려는 의도가 아니다. 본 출원에서, "포함하다" 또는 "가지다" 등의 용어는 명세서상에 기재된 특징, 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것이 존재함을 지정하려는 것이지, 하나 또는 그 이상의 다른 특징들이나 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것들의 존재 또는 부가 가능성을 미리 배제하지 않는 것으로 이해되어야 한다.The terminology used in this application is used only to describe a specific embodiment and is not intended to limit the invention. In the present application, the terms "comprises" or "having" and the like are used to specify that there is a feature, a number, a step, an operation, an element, a component or a combination thereof described in the specification, But do not preclude the presence or addition of one or more other features, integers, steps, operations, elements, components, or combinations thereof.
110: 1차 감시 레이다
120: 2차 감시 레이다
130: 저장부
140: 제어부110: primary surveillance radar
120: Secondary surveillance radar
130:
140:
Claims (8)
Translated fromKorean상기 비행체로부터 송신되는 위치정보를 포함하는 응답신호를 수신하는 2차 감시 레이다;
상기 반사신호 및 상기 위치정보를 저장하는 저장부; 및
평가범위 내의 모든 신호에 대해 상기 반사신호 및 상기 위치정보로부터 결정되는 고도오차의 평균값인 대기평가함수로써 대기를 평가하여, 평가된 대기의 종류에 따라 반사신호로부터 결정되는 위치의 고도에서 상기 대기평가함수에 의한 고도오차를 차감하여 상기 비행체의 위치를 보정하는 제어부를 포함하는 대기평가 시스템.
A primary surveillance ray transmitting a detection signal and receiving a reflection signal reflected from a flying object;
A secondary monitoring radar for receiving a response signal including position information transmitted from the air vehicle;
A storage unit for storing the reflection signal and the position information; And
Evaluating the atmosphere with a waiting evaluation function which is an average value of altitude errors determined from the reflection signal and the positional information for all signals within the evaluation range and evaluating the atmospheric evaluation And correcting the position of the flying object by subtracting the altitude error caused by the function.
상기 반사신호로부터 결정되는 위치의 고도에서 상기 대기평가함수로부터 유도되는 위치의 가중치를 곱하여 상기 비행체의 위치를 보정하는 대기평가 시스템.
The apparatus of claim 1,
And the position of the airplane is corrected by multiplying a weight of a position derived from the atmospheric evaluation function at an altitude of a position determined from the reflected signal.

(이때, AEM(r, φ)는 대기평가함수이고, hPSR(ri, φi)은 (ri, φi)에서 반사신호로부터 결정된 고도이고, hSSR(ri, φi)은 위치정보에 의해 결정되는 고도이고, N은 평가범위 Δrw(수평거리의 범위)과 Δφw(방위각의 범위) 내에 존재하는 (r, φ)에 관한 데이터 쌍의 수임)
The waiting evaluation system according to claim 1, wherein the waiting evaluation function is determined by the following equation.
(At this time, AEM (r, φ) is the air evaluation function and, hPSR (ri, φi) is (ri, and the height determined from the reflected signals from theφ i), h SSR (r i, φ i) and a height which is determined by the position information, N is a data pair of ordination on the (r, φ) existing in the evaluation range Δrw (range of horizontal distance) and Δφw (range azimuth))
상기 평가범위에서 고도오차에 대한 표준편차를 계산하고, 임계값과 비교하여 표준편차가 임계값을 초과하는 경우 평가범위를 조정하는 대기평가 시스템.
The apparatus of claim 1,
Calculating a standard deviation of the altitude error in the evaluation range, and comparing the standard deviation with the threshold value to adjust the evaluation range when the standard deviation exceeds the threshold value.
2. The atmospheric evaluation system according to claim 1, wherein the atmosphere is evaluated by a standard atmosphere, a hypothetical atmosphere, and a hypocrite atmosphere by the atmosphere evaluation function, and the control unit corrects the position of the air vehicle accordingly.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020170025115AKR101954283B1 (en) | 2017-02-24 | 2017-02-24 | System and method for evaluating atmospheric conditions using long-range surveillance radar |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020170025115AKR101954283B1 (en) | 2017-02-24 | 2017-02-24 | System and method for evaluating atmospheric conditions using long-range surveillance radar |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20180098094A KR20180098094A (en) | 2018-09-03 |
| KR101954283B1true KR101954283B1 (en) | 2019-03-05 |
Family
ID=63601050
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020170025115AExpired - Fee RelatedKR101954283B1 (en) | 2017-02-24 | 2017-02-24 | System and method for evaluating atmospheric conditions using long-range surveillance radar |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101954283B1 (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102089539B1 (en) | 2019-06-24 | 2020-03-16 | 한화시스템 주식회사 | Method and system for analyzing wave propagation characteristics and target detection performance of long range detection radar according to upper air conditions |
| KR102089540B1 (en) | 2019-06-24 | 2020-03-16 | 한화시스템 주식회사 | Method for analyzing wave propagation characteristics and target detection performance of long range detection radar according to upper air conditions |
| KR102089542B1 (en) | 2019-06-24 | 2020-03-16 | 한화시스템 주식회사 | Method for analyzing wave propagation characteristics of long range detection radar according to upper air conditions |
| KR102089541B1 (en) | 2019-06-24 | 2020-03-16 | 한화시스템 주식회사 | Method and system for analyzing wave propagation characteristics of long range detection radar according to upper air conditions |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102373482B1 (en)* | 2020-07-13 | 2022-03-11 | 엘아이지넥스원 주식회사 | Method and Apparatus for compensating altitude error of radar |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012194105A (en) | 2011-03-17 | 2012-10-11 | Mitsubishi Electric Corp | Sensor error calibration system |
| KR101461131B1 (en)* | 2014-01-21 | 2014-11-20 | 엘아이지넥스원 주식회사 | Calibration method for monopulse radar system |
| US20150301159A1 (en) | 2014-04-22 | 2015-10-22 | Robert Bosch Gmbh | Method for calibrating a radar sensor, and radar system |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0743318A (en)* | 1991-04-30 | 1995-02-14 | Kenichi Kawamata | Measurement of refractive index of atmospheric gas by utilizing radio wave propagation |
- 2017
- 2017-02-24KRKR1020170025115Apatent/KR101954283B1/ennot_activeExpired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012194105A (en) | 2011-03-17 | 2012-10-11 | Mitsubishi Electric Corp | Sensor error calibration system |
| KR101461131B1 (en)* | 2014-01-21 | 2014-11-20 | 엘아이지넥스원 주식회사 | Calibration method for monopulse radar system |
| US20150301159A1 (en) | 2014-04-22 | 2015-10-22 | Robert Bosch Gmbh | Method for calibrating a radar sensor, and radar system |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102089539B1 (en) | 2019-06-24 | 2020-03-16 | 한화시스템 주식회사 | Method and system for analyzing wave propagation characteristics and target detection performance of long range detection radar according to upper air conditions |
| KR102089540B1 (en) | 2019-06-24 | 2020-03-16 | 한화시스템 주식회사 | Method for analyzing wave propagation characteristics and target detection performance of long range detection radar according to upper air conditions |
| KR102089542B1 (en) | 2019-06-24 | 2020-03-16 | 한화시스템 주식회사 | Method for analyzing wave propagation characteristics of long range detection radar according to upper air conditions |
| KR102089541B1 (en) | 2019-06-24 | 2020-03-16 | 한화시스템 주식회사 | Method and system for analyzing wave propagation characteristics of long range detection radar according to upper air conditions |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20180098094A (en) | 2018-09-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101954283B1 (en) | System and method for evaluating atmospheric conditions using long-range surveillance radar | |
| US7095364B1 (en) | Altitude measurement system and associated methods | |
| US7864096B2 (en) | Systems and methods for multi-sensor collision avoidance | |
| US8798819B2 (en) | Vertical required navigation performance containment with radio altitude | |
| US6927725B2 (en) | System and method for radar detection and calibration | |
| US5485156A (en) | Antenna stabilization error correction system for radar | |
| US7701393B2 (en) | Radio frequency navigation using frequency response matching | |
| JP7170103B2 (en) | Aircraft landing system and method | |
| CN102695942B (en) | For the method and system of spectral image celestial navigation | |
| EP1333297A2 (en) | Method and system for determining air turbulence using bi-static measurements | |
| US20210139164A1 (en) | Method, device and system for detecting magnetic field interference | |
| KR101454102B1 (en) | System and method for air surveillance data processing using ads-b data | |
| CN117930664B (en) | Unmanned aerial vehicle landing control optimizing system based on Beidou RTK differential positioning | |
| Jamoom et al. | Unmanned aircraft system sense-and-avoid integrity and continuity risk | |
| KR20190044322A (en) | The Method and apparatus of altitude aiding of the inertial navigation system | |
| US8742973B1 (en) | System and method of determining increased turbulence susceptibility with elapsed flight time | |
| KR101963889B1 (en) | Apparatus and method for performance measurements of flight control and system using the same | |
| EP3696533A1 (en) | Determining metrics of a cloud atmosphere using time-difference measurements | |
| CA2970282C (en) | System and method to provide a dynamic situational awareness of attack radar threats | |
| JP2004527761A (en) | Closed-loop power management for radar-based systems | |
| KR101742126B1 (en) | Apparatus for controlling measuring an altitude and method thereof | |
| Kendall | A methodology for the design and operational safety assessment of unmanned aerial systems | |
| US20250208257A1 (en) | Detecting hardware failure in a radar system based on comparing actual and expected radar data | |
| US11482122B2 (en) | Methods and systems for monitoring a fault condition of a radar altitude device | |
| Liu et al. | Research on Noise Suppression of Civilian Airplane’s Localizer Deviation Signal |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application | St.27 status event code:A-0-1-A10-A12-nap-PA0109 | |
| PA0201 | Request for examination | St.27 status event code:A-1-2-D10-D11-exm-PA0201 | |
| D13-X000 | Search requested | St.27 status event code:A-1-2-D10-D13-srh-X000 | |
| D14-X000 | Search report completed | St.27 status event code:A-1-2-D10-D14-srh-X000 | |
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection | St.27 status event code:A-1-2-D10-D21-exm-PE0902 | |
| T11-X000 | Administrative time limit extension requested | St.27 status event code:U-3-3-T10-T11-oth-X000 | |
| T11-X000 | Administrative time limit extension requested | St.27 status event code:U-3-3-T10-T11-oth-X000 | |
| T11-X000 | Administrative time limit extension requested | St.27 status event code:U-3-3-T10-T11-oth-X000 | |
| P11-X000 | Amendment of application requested | St.27 status event code:A-2-2-P10-P11-nap-X000 | |
| P13-X000 | Application amended | St.27 status event code:A-2-2-P10-P13-nap-X000 | |
| R17-X000 | Change to representative recorded | St.27 status event code:A-3-3-R10-R17-oth-X000 | |
| T11-X000 | Administrative time limit extension requested | St.27 status event code:U-3-3-T10-T11-oth-X000 | |
| PG1501 | Laying open of application | St.27 status event code:A-1-1-Q10-Q12-nap-PG1501 | |
| E13-X000 | Pre-grant limitation requested | St.27 status event code:A-2-3-E10-E13-lim-X000 | |
| P11-X000 | Amendment of application requested | St.27 status event code:A-2-2-P10-P11-nap-X000 | |
| P13-X000 | Application amended | St.27 status event code:A-2-2-P10-P13-nap-X000 | |
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration | St.27 status event code:A-1-2-D10-D22-exm-PE0701 | |
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment | St.27 status event code:A-2-4-F10-F11-exm-PR0701 | |
| PR1002 | Payment of registration fee | Fee payment year number:1 St.27 status event code:A-2-2-U10-U11-oth-PR1002 | |
| PG1601 | Publication of registration | St.27 status event code:A-4-4-Q10-Q13-nap-PG1601 | |
| PC1903 | Unpaid annual fee | Not in force date:20220227 Payment event data comment text:Termination Category : DEFAULT_OF_REGISTRATION_FEE St.27 status event code:A-4-4-U10-U13-oth-PC1903 | |
| K11-X000 | Ip right revival requested | St.27 status event code:A-6-4-K10-K11-oth-X000 | |
| PC1903 | Unpaid annual fee | Ip right cessation event data comment text:Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date:20220227 St.27 status event code:N-4-6-H10-H13-oth-PC1903 | |
| PR0401 | Registration of restoration | St.27 status event code:A-6-4-K10-K13-oth-PR0401 | |
| PR1001 | Payment of annual fee | Fee payment year number:4 St.27 status event code:A-4-4-U10-U11-oth-PR1001 | |
| PR1001 | Payment of annual fee | Fee payment year number:5 St.27 status event code:A-4-4-U10-U11-oth-PR1001 | |
| PR1001 | Payment of annual fee | Fee payment year number:6 St.27 status event code:A-4-4-U10-U11-oth-PR1001 | |
| P14-X000 | Amendment of ip right document requested | St.27 status event code:A-5-5-P10-P14-nap-X000 | |
| P14-X000 | Amendment of ip right document requested | St.27 status event code:A-5-5-P10-P14-nap-X000 | |
| R18-X000 | Changes to party contact information recorded | St.27 status event code:A-5-5-R10-R18-oth-X000 |