KR101941643B1 - System and method for control of multi drone - Google Patents
System and method for control of multi droneDownload PDFInfo
- Publication number
- KR101941643B1 KR101941643B1KR1020160129075AKR20160129075AKR101941643B1KR 101941643 B1KR101941643 B1KR 101941643B1KR 1020160129075 AKR1020160129075 AKR 1020160129075AKR 20160129075 AKR20160129075 AKR 20160129075AKR 101941643 B1KR101941643 B1KR 101941643B1
- Authority
- KR
- South Korea
- Prior art keywords
- drones
- drone
- virtual
- agent
- flight
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034methodMethods0.000titleclaimsdescription49
- 238000012544monitoring processMethods0.000claimsabstractdescription29
- 238000004891communicationMethods0.000claimsdescription32
- RZVHIXYEVGDQDX-UHFFFAOYSA-N9,10-anthraquinoneChemical compoundC1=CC=C2C(=O)C3=CC=CC=C3C(=O)C2=C1RZVHIXYEVGDQDX-UHFFFAOYSA-N0.000claimsdescription15
- 230000005540biological transmissionEffects0.000claimsdescription4
- 238000012545processingMethods0.000claimsdescription4
- 230000009545invasionEffects0.000claimsdescription3
- 238000012986modificationMethods0.000claimsdescription3
- 230000004048modificationEffects0.000claimsdescription3
- 238000012360testing methodMethods0.000claimsdescription3
- 230000032683agingEffects0.000claimsdescription2
- 230000010006flightEffects0.000claimsdescription2
- 231100001261hazardousToxicity0.000claims1
- 239000003795chemical substances by applicationSubstances0.000description69
- 238000010586diagramMethods0.000description10
- 238000005516engineering processMethods0.000description5
- 230000008569processEffects0.000description4
- 238000010276constructionMethods0.000description3
- 238000013507mappingMethods0.000description3
- CURLTUGMZLYLDI-UHFFFAOYSA-NCarbon dioxideChemical compoundO=C=OCURLTUGMZLYLDI-UHFFFAOYSA-N0.000description2
- 230000002159abnormal effectEffects0.000description2
- 230000001133accelerationEffects0.000description2
- 238000012549trainingMethods0.000description2
- 238000012546transferMethods0.000description2
- 241000287531PsittacidaeSpecies0.000description1
- QVGXLLKOCUKJST-UHFFFAOYSA-Natomic oxygenChemical compound[O]QVGXLLKOCUKJST-UHFFFAOYSA-N0.000description1
- 229910002092carbon dioxideInorganic materials0.000description1
- 239000001569carbon dioxideSubstances0.000description1
- 230000008859changeEffects0.000description1
- 239000000470constituentSubstances0.000description1
- 238000013500data storageMethods0.000description1
- 230000007123defenseEffects0.000description1
- 230000001419dependent effectEffects0.000description1
- 238000011161developmentMethods0.000description1
- 230000018109developmental processEffects0.000description1
- 238000010304firingMethods0.000description1
- 230000004927fusionEffects0.000description1
- 238000004519manufacturing processMethods0.000description1
- 230000006855networkingEffects0.000description1
- 230000003287optical effectEffects0.000description1
- 229910052760oxygenInorganic materials0.000description1
- 239000001301oxygenSubstances0.000description1
- 238000012797qualificationMethods0.000description1
- 238000007634remodelingMethods0.000description1
- 238000012827research and developmentMethods0.000description1
- 230000004044responseEffects0.000description1
- 230000008054signal transmissionEffects0.000description1
- 230000001502supplementing effectEffects0.000description1
Images





Classifications
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/22—Command input arrangements
- G05D1/221—Remote-control arrangements
- G05D1/222—Remote-control arrangements operated by humans
- G05D1/224—Output arrangements on the remote controller, e.g. displays, haptics or speakers
- G05D1/2244—Optic
- G05D1/2245—Optic providing the operator with a purely computer-generated representation of the environment of the vehicle, e.g. virtual reality
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0011—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement
- G05D1/0044—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots associated with a remote control arrangement by providing the operator with a computer generated representation of the environment of the vehicle, e.g. virtual reality, maps
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C39/00—Aircraft not otherwise provided for
- B64C39/02—Aircraft not otherwise provided for characterised by special use
- B64C39/024—Aircraft not otherwise provided for characterised by special use of the remote controlled vehicle type, i.e. RPV
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D1/00—Dropping, ejecting, releasing or receiving articles, liquids, or the like, in flight
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D47/00—Equipment not otherwise provided for
- B64D47/08—Arrangements of cameras
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/0055—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots with safety arrangements
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/60—Intended control result
- G05D1/69—Coordinated control of the position or course of two or more vehicles
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/80—Arrangements for reacting to or preventing system or operator failure
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B9/00—Simulators for teaching or training purposes
- G09B9/02—Simulators for teaching or training purposes for teaching control of vehicles or other craft
- G09B9/08—Simulators for teaching or training purposes for teaching control of vehicles or other craft for teaching control of aircraft, e.g. Link trainer
- G09B9/12—Motion systems for aircraft simulators
- B64C2201/146—
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2201/00—UAVs characterised by their flight controls
- B64U2201/20—Remote controls
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D2109/00—Types of controlled vehicles
- G05D2109/20—Aircraft, e.g. drones
Landscapes
- Engineering & Computer Science (AREA)
- Aviation & Aerospace Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Theoretical Computer Science (AREA)
- Automation & Control Theory (AREA)
- Business, Economics & Management (AREA)
- Educational Technology (AREA)
- Educational Administration (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
- General Engineering & Computer Science (AREA)
- Traffic Control Systems (AREA)
Abstract
Translated fromKoreanDescription
Translated fromKorean본 발명은 멀티 드론 제어 시스템 및 방법에 관한 것으로, 더욱 상세하게는 드론 조종 단말의 조종 데이터와 드론의 상태 정보 및 조종자 개별 정보를 파악하여 위험 요인을 사전에 차단하거나 제한된 조건에서 멀티 드론을 운영하는 멀티 드론 제어 시스템 및 방법에 관한 것이다.The present invention relates to a multi-drone control system and method, and more particularly, to a multi-drone control system and method, and more particularly, to a multi-drone control system and method, To a multi-drone control system and method.
소위 드론이라고 불리는 무인 항공기는 조종사가 탑승하지 않고 원격 조종 또는 자동 조종을 통해 임무를 수행할 수 있는 비행체를 의미한다. 미 국방장관실(OSD, Office of the Secretary of Defense)이 발간한 UAV 로드맵에 따르면, 드론을“인간 조종사를 태우지 않고, 공기 역학적 힘을 사용하여 자율적 혹은 원격 조종을 통해 비행하며, 일회용 또는 재사용할 수 있고, 치명적 또는 비 치명적인 화물을 탑재할 수 있는 동력 비행체를 의미한다.A so-called drones, unmanned airplane, means a flight capable of carrying out a mission through remote control or autopilot without a pilot boarding. According to the UAV roadmap published by the Office of the Secretary of Defense (OSD), the drones can be used "without firing human pilots, flying autonomously or remotely using aerodynamic forces, disposing or reusing Means a powered vehicle capable of carrying fatal or non-fatal cargo.
드론의 시작은 전투 및 정찰을 위한 군사적 용도로 사용되었지만 최근에는 민간에서도 농업, 산불감시 및 진화, 배송, 물류, 통신, 촬영, 재난상황 대처, 연구개발 등 다양한 분야에서 활용 중이며 점차 시장과 영역을 넓혀 나가고 있다.Although the beginning of the drones has been used for military purposes for combat and reconnaissance, it has recently been used in a variety of fields such as agriculture, forest fire monitoring and evolving, shipping, logistics, communication, shooting, disaster response, research and development. It is expanding.
드론 시스템이 다양한 분야에서 각광받는 이유는 원격 조종이 가능하고 드론에 부가적인 기기를 부착하여 운용할 수 있기 때문이다. 부가적인 기기들은 작게는 온도나 조도센서, 산소 및 이산화탄소 농도센서를 비롯하여 GPS, 카메라, 초음파 장비까지 필요에 따라 선택할 수 있다. 무선통신으로 드론은 사진이나 동영상 등의 임무수행 결과를 지상으로 전송할 수 있고, 지상관제시스템은 원격 측정(Telemetry)을 통해 측정한 센서 값을 확인하거나 조정할 수 있다.The reason why the dron system is popular in various fields is that it can be remotely controlled and can be operated by attaching an additional device to the drones. Additional devices can be selected as needed, including temperature, ambient light, oxygen and carbon dioxide sensors, as well as GPS, camera and ultrasonic equipment. By wireless communication, the drones can transmit the result of the mission such as photo or video to the ground, and the ground control system can check or adjust the sensor value measured by telemetry.
본 발명의 첫 번째 과제는 기존의 드론 및 조종 프로그램의 변경이나 개조 없이, 조종 프로그램과 드론과의 네트워크 단절이 일어나더라도 드론을 안전하게 운용할 수 있는 멀티 드론 제어 시스템을 제공하는데 있다.A first object of the present invention is to provide a multi-drone control system capable of safely operating a drone even if network disconnection between a control program and a drone occurs without changing or modifying existing drone and control programs.
두 번째 과제는 드론과 조종자의 개별정보, 조종 단말의 명령 및 드론의 실시간 모니터링 비행 정보를 고려하여 위험 요인을 사전에 차단하거나 제한된 조건에서 멀티 드론을 운용하는 멀티 드론 제어 시스템을 제공하는데 있다.The second task is to provide a multi-drone control system which can prevent dangerous factors in advance or operate a multidron under limited conditions in consideration of the individual information of the drones and the operator, the command of the control terminal, and the real-time monitoring flight information of the drones.
세 번째 과제는 멀티 드론과 멀티 조종자 환경에 필요한 네트워크 구축을 위해 패킷 손실이 적고, 접속 안정성이 높은 드론, 가상화 서버 및 조종 단말의 각 포인트별 특정한 메쉬업 네트워크 구축을 위한 멀티 드론 제어 방법을 제공하는데 있다.The third task is to provide a multi-drone control method for constructing a specific mesh-up network for each point of a drone, a virtualization server and a control terminal with low packet loss and high connection stability in order to construct a network necessary for a multidron and a multi- have.
본 발명의 일실시 예에 따른 멀티 드론 제어 시스템은 드론 및 조종자에 관한 개별정보, 상기 드론의 실시간 모니터링 정보 및 해당 지역의 비행 정책 정보를 분석하고, 상기 분석에 따라 드론 제어 명령을 생성하는 가상화 서버 및 상기 드론의 실시간 모니터링 정보를 수렴하여 상기 가상화 서버에 전달하고, 상기 드론 제어 명령에 따라 상기 드론의 비행을 제어하는 가상 드론 에이전트를 포함한다.The multidron control system according to an embodiment of the present invention analyzes individual information related to drones and controllers, real-time monitoring information of the drones, and flight policy information of a corresponding region, and generates a drones control command And a virtual drones agent for collecting real-time monitoring information of the drones and delivering them to the virtualization server, and controlling the flight of the drones according to the drones control command.
본 발명의 다른 실시 예에 의하면, 가상화 서버는 비행 허용 구역인 실제 공간에 대한 가상 공간을 정의하고, 상기 드론 및 조종자의 개별정보 및 실시간 비행 모니터링 정보와 상기 가상 공간을 기반으로 해당 드론 시뮬레이터를 실시간으로 생성한다.According to another embodiment of the present invention, the virtualization server defines a virtual space for an actual space, which is a flight allowable zone, and provides a real time flight monitoring information and real time flight monitoring information of the drone and the controller, .
본 발명의 다른 실시 예에 의하면, 조종자 개별정보는 조종자의 개인정보, 드론 비행 자격 유무, 조종자의 드론 비행 경력, 드론 운행 년차, 드론 운행 횟수, 드론 비행 시 사고 이력, 드론 비행 대회 진출 이력, 드론 비행 테스트 레벨, 등급 중 적어도 하나를 포함한다.According to another embodiment of the present invention, the individual information of the driver may include personal information of the driver, presence or absence of the dragon flight, the driver's drone flight history, the year of the drone operation, the number of times of the drone operation, the accident history of the drone flight, A flight test level, and a rating.
본 발명의 다른 실시 예에 의하면, 드론 개별정보는 드론의 명칭, 제조사, 운행 성능표, 드론의 노후 정도 및 드론의 개조유무, 드론의 무게, 크기, 날개개수, 탑재된 카메라의 화소 및 화질, 최대주행가능거리, 배터리 지속시간 중 적어도 하나를 포함한다.According to another embodiment of the present invention, the individual dron information includes at least one of a name of the drones, a maker, a performance table, a degree of aging of the drones and modification of the drones, a weight and size of the drones, a number of wings, The maximum travelable distance, and the battery duration.
본 발명의 다른 실시 예에 의하면, 가상화 서버는 드론 비행 허가 구역을 드론 등급별로 액세스 가능한 등급별 비행 구역으로 나누어 관리하고, 위험요소에 인접한 구역일수록 높은 등급의 드론들에 대해서만 비행을 허용하고, 상대적으로 안전한 구역일수록 낮은 등급의 드론들에 대해서만 비행을 허용한다.According to another embodiment of the present invention, the virtualization server divides and manages the drone flight permission zone into a grade-specific flight zone accessible by the drone level, permits the flight to the higher grade drone as the zone adjacent to the risk element, Safe zones allow flights only for low-grade drones.
본 발명의 다른 실시 예에 의하면, 가상 드론 에이전트는 서로 다른 복수의 상용 드론의 명령구문을 해석하기 위해 드론의 제조사별로 상이한 명령체계에 따라 실시간으로 상기 가상화 서버로부터 해당 프로토콜을 지원받는다.According to another embodiment of the present invention, the virtual drone agent receives a corresponding protocol from the virtualization server in real time according to a different instruction system for each manufacturer of the drone in order to analyze command syntax of a plurality of commercial drone.
본 발명의 다른 실시 예에 의하면, 가상 드론 에이전트는 상기 드론의 실시간 위치 정보, 비행 제한 구역 이탈, 타 드론과의 충돌, 제한 구역 침범, 비행 조종 미숙 중 적어도 하나를 탐지한다.According to another embodiment of the present invention, the virtual drones agent detects at least one of real-time position information of the drones, flight restriction zone departure, collision with the treadmill, restricted area invasion, and flight control immaturity.
본 발명의 다른 실시 예에 의하면, 드론의 실시간 모니터링 정보는 상기 드론에 탑재된 실시간 위치 추적 시스템(RTLS), 카메라, GPS/Navigation, 자이로 센서(Gyro), 가속도 센서(Accelerator) 중 적어도 하나의 데이터로부터 획득한다.According to another embodiment of the present invention, the real-time monitoring information of the drones may include at least one of the real-time location system (RTLS), camera, GPS / Navigation, gyro sensor, Lt; / RTI >
본 발명의 또 다른 실시 예에 의한 드론은 조종 단말 또는 가상 드론 에이전트로부터 명령을 수신하고, 드론의 모니터링 정보를 상기 가상 드론 에이전트로 전송하는 통신부와, 상기 통신부를 통해 수신된 데이터를 소프트웨어 정의 네트워크(SDN)를 기반으로 가공하여 변환된 전송방식으로 처리하는 브릿지 모듈 및 상기 브릿지 모듈로부터 수신된 명령에 따라 드론 비행을 제어하는 제어부를 포함하여 구성된다.A dron according to another embodiment of the present invention includes a communication unit for receiving an instruction from a control terminal or a virtual drones agent and transmitting monitoring information of the drones to the virtual drones agent, SDN) to process the converted transmission method, and a controller for controlling the drone flight according to the command received from the bridge module.
본 발명의 다른 실시 예에 의하면, 통신부는 상기 조종 단말 또는 상기 가상 드론 에이전트와 블루투스 네트워크로 연결되고, 상기 브릿지 모듈은 Bluetooth to WiFi Data converter module로 구성된다.According to another embodiment of the present invention, the communication unit is connected to the control terminal or the virtual drones agent through a Bluetooth network, and the bridge module comprises a Bluetooth to WiFi data converter module.
본 발명의 다른 실시 예에 의하면, 브릿지 모듈은 상기 조종 단말 또는 상기 가상 드론 에이전트에서 보낸 1단위의 비동기 명령을 와이파이 데이터로 변환하여, 상기 명령을 완수할 때까지 지속적인 신호를 상기 제어부에 발신한다.According to another embodiment of the present invention, the bridge module converts one unit asynchronous command sent from the control terminal or the virtual drones agent into Wi-Fi data, and sends a continuous signal to the control unit until the command is completed.
본 발명의 다른 실시 예에 의하면, 상기 드론으로부터 상기 조종 단말 또는 상기 가상 드론 에이전트 간의 거리가 100m 이상 3Km 이내의 원거리일 경우, 멀티 드론을 메인 드론 및 서브 드론으로 구분하고, 상기 메인 드론은 상기 조종 단말 또는 상기 가상 드론 에이전트와 WiFi를 통해 연결되고, 상기 서브 드론은 상기 메인 드론과 UWB(Ultra-wideband communication)-UWB(또는 LTE Direct-LTE Direct)인 메쉬업(Mesh up) 비동기 네트워크로 연결되어, 상기 메인 드론으로부터 명령을 수신하여 공유한다.According to another embodiment of the present invention, when the distance between the drones and the control terminal or the virtual drones is in a range of 100 m or more and 3 km or less, the main drones are divided into main drones and sub drones, And the virtual drone agent is connected to the virtual drone agent through WiFi, and the sub drone is connected to the main drone as a mesh up asynchronous network that is an Ultra-wideband communication-UWB (or LTE Direct-LTE Direct) , And receives and shares commands from the main drone.
본 발명의 다른 실시 예에 의하면, 제어부는 상기 조종 단말의 명령보다 상기 가상 드론 에이전트로부터 수신된 명령을 우선적으로 실행하도록 설계된다.According to another embodiment of the present invention, the control unit is designed to preferentially execute the command received from the virtual drones agent rather than the command of the control terminal.
본 발명의 또 다른 실시 예에 의한 멀티 드론 제어 방법은, 가상 드론 에이전트가 드론의 통신부 또는 조종 단말로부터 수신한 비행 모니터링 정보를 가상화 서버로 전달하는 단계와, 상기 가상화 서버가 상기 비행 모니터링 정보를 분석하여 비행 제어 신호를 생성하고, 상기 비행 제어 신호를 상기 가상 드론 에이전트로 전달하는 단계와, 상기 가상 드론 에이전트가 상기 비행 제어 신호를 상기 드론의 통신부로 전달하는 단계 및 상기 드론의 통신부가 상기 비행 제어 신호를 변환하여 상기 드론 내에 구비된 브릿지 모듈에 전달하는 단계를 포함한다.In another aspect of the present invention, there is provided a method for controlling a multidron, the method comprising: transferring flight monitoring information received from a drones communication unit or a control terminal to a virtualization server; Generating a flight control signal and delivering the flight control signal to the virtual drone agent; transmitting the flight control signal to the communication unit of the drone; And converting and transmitting the signal to the bridge module provided in the drone.
본 발명의 다른 실시 예에 의하면, 상기 드론의 통신부와 상기 드론 내에 구비된 브릿지 모듈은, 최대 대역폭 확보를 위해 WiFi 또는 WiFi-D 방식으로 연결된다.According to another embodiment of the present invention, the communication unit of the drones and the bridge module provided in the drones are connected by a WiFi or WiFi-D method in order to secure a maximum bandwidth.
본 발명의 다른 실시 예에 의하면, 상기 통신부와 상기 가상 드론 에이전트는 블루투스 네트워크로 연결되고, 상기 브릿지 모듈은 상기 블루투스 신호를 와이파이 신호로 변환한다.According to another embodiment of the present invention, the communication unit and the virtual drones agent are connected via a Bluetooth network, and the bridge module converts the Bluetooth signal into a Wi-Fi signal.
본 발명의 다른 실시 예에 의하면, 상기 가상 드론 에이전트와 상기 가상화 서버 간의 연결은, 맥 어드레스(Mac Address)를 통해 키(key)값을 조회함으로써 연결되고, WiFi/Local LAN/3G/4G/LTE 중 적어도 하나를 통해 연결된다.According to another embodiment of the present invention, the connection between the virtual drone agent and the virtualization server is performed by inquiring a key value through a MAC address, and is connected to a WiFi / Local LAN / 3G / 4G / LTE Lt; / RTI >
본 발명의 다른 실시 예에 의하면, 상기 가상 드론 에이전트는, 여러 드론의 연결 또는 연결 해제를 위해 상기 가상 드론 에이전트와 상기 조종 단말 간의 연결에 따라 패킷 중계 데몬을 동적으로 생성 또는 폐기하는 단계를 더 포함한다.According to another embodiment of the present invention, the virtual drones agent further includes a step of dynamically creating or discarding a packet relay daemon in accordance with the connection between the virtual drones agent and the control terminal for connection or disconnection of the plurality of drones do.
본 발명의 다른 실시 예에 의하면, 상기 가상 드론 에이전트는, 여러 대의 드론이 상기 가상 드론 에이전트에 동시에 접근할 경우, 시간 우선 쟁탈 방식으로 상기 패킷 중계 데몬을 취득하는 단계를 더 포함한다.According to another embodiment of the present invention, the virtual drones agent further includes acquiring the packet relay daemon in a time-first contending manner when a plurality of drones access the virtual drones agent at the same time.
본 발명의 다른 실시 예에 의하면, 상기 브릿지 모듈과 상기 가상 드론 에이전트는, 지연시간이 미리 설정된 소정 시간 이내가 되도록 상기 비행 모니터링 정보를 전송하는 조건에 만족하고, 상기 드론에서 생성된 고용량 컨텐츠 데이터의 저장 위치 지정에 따라서 연결된다.According to another embodiment of the present invention, the bridge module and the virtual drones agent satisfy the condition for transmitting the flight monitoring information so that the delay time is within a predetermined time, It is connected according to the storage location designation.
본 발명의 다른 실시 예에 의하면, 상기 가상 드론 에이전트와 상기 브릿지 모듈과의 1:N의 연결을 위해, 상기 가상 드론 에이전트와 상기 가상화 서버 간의 연결을 통해 상기 가상 드론 에이전트에 생성된 패킷 중계 데몬과 상기 브릿지 모듈이 연결된다.According to another embodiment of the present invention, there is provided a packet relay daemon generated in the virtual drone agent through a connection between the virtual drone agent and the virtualization server for 1: N connection between the virtual drone agent and the bridge module, The bridge module is connected.
본 발명의 일실시 예에 따르면, 기존의 드론 및 조종 프로그램의 변경이나 개조 없이, 조종 프로그램과 드론과의 네트워크 단절이 일어나더라도 드론을 안전하게 운용할 수 있다.According to an embodiment of the present invention, the drone can be operated safely even if network disconnection between the control program and the drone occurs without changing or modifying the existing drone and the control program.
또한, 본 발명의 일실시 예에 따르면, 드론과 조종자의 개별정보, 조종 단말의 명령 및 드론의 실시간 모니터링 비행 정보를 고려하여 위험 요인을 사전에 차단하거나 제한된 조건에서 멀티 드론을 운영할 수 있다.Also, according to an embodiment of the present invention, the risk factors may be blocked in advance or the multi-drone may be operated under limited conditions, taking into account the individual information of the drones and the operator, the command of the control terminal, and the real-time monitoring flight information of the drones.
아울러, 본 발명의 일실시 예에 따르면, 멀티 드론과 멀티 조종자 환경에 필요한 네트워크 구축을 위해 패킷 손실이 적고, 접속 안정성이 높은 드론, 가상화 서버 및 조종 단말의 각 포인트별 특정한 메쉬업 네트워크를 구축하기 위한 동적 소프트웨어 정의 네트워크를 구현할 수 있다.In addition, according to an embodiment of the present invention, it is possible to construct a specific mesh-up network for each point of a drone, a virtualization server and a control terminal with low packet loss and high connection stability for network construction required for multi- A dynamic software defined network can be implemented.
도 1은 본 발명의 일실시 예에 따른 멀티 드론 제어 시스템의 개괄적인 구성을 도시하는 도면이다.
도 2는 본 발명의 일실시 예에 따라 정의된 가상 공간을 도시하는 도면이다.
도 3은 본 발명의 실시 예에 따른 드론의 구성을 도시하는 블록도이다.
도 4는 본 발명의 실시 예에 따른 근거리 네트워크를 위한 통신 구축 기술을 설명하기 위한 예시 도면이다.
도 5는 본 발명의 실시 예에 따른 원거리 네트워크를 위한 통신 구축 기술을 설명하기 위한 예시 도면이다.
도 6은 본 발명의 실시 예에 따른 동적 소프트웨어 정의 네트워크의 개략적인 구성을 도시한 도면이다.
도 7은 본 발명의 실시 예에 따른 네트워크 모듈 간의 연결 방법을 도시한 도면이다.1 is a diagram showing a general configuration of a multi-drone control system according to an embodiment of the present invention.
2 is a diagram illustrating a virtual space defined in accordance with an embodiment of the present invention.
3 is a block diagram showing the configuration of a drones according to an embodiment of the present invention.
4 is an exemplary diagram for explaining a communication establishing technique for a local area network according to an embodiment of the present invention.
5 is an exemplary diagram for explaining a communication establishing technique for a long-distance network according to an embodiment of the present invention.
6 is a diagram showing a schematic configuration of a dynamic software definition network according to an embodiment of the present invention.
7 is a diagram illustrating a connection method between network modules according to an embodiment of the present invention.
본 발명의 실시 예들을 설명하기에 앞서, 기존의 드론 운용 실태의 문제점들을 검토한 후, 이들 문제점을 해결하기 위해 본 발명의 실시 예들이 채택하고 있는 기술적 수단을 개괄적으로 소개하도록 한다.Before explaining the embodiments of the present invention, the technical means adopted by the embodiments of the present invention will be introduced to solve these problems after examining the problems of the existing drone operating state.
드론의 대중화로 전국에 드론 공원 및 드론 비행장과 같은 드론 전용 공간이 우후죽순으로 생기고 있으나, 드론 비행을 제어하거나 규제하는 시스템의 개발은 전무한 상황이다.With the popularization of drones, drones such as drone parks and drone airstrips have been developed all over the country, but there has been no development of systems to control or regulate drone flight.
또한, 상용 기성품 드론 제작 회사에서 제공하는 조종 프로그램 대부분은 스마트 폰을 통해 사용되는데, 스마트 폰이 드론과 연결된 상태에서는 외부와의 데이터 네트워크는 완전히 차단될 뿐만 아니라, 폰 특성상 전화가 왔을 경우, 네트워크 변경으로 인해 드론 조종 단말로서의 제어권을 상실하게 되기 때문에 드론 비행운용에 위험한 단점이 있다.In addition, most of the control programs provided by commercial ready-to-wear drones are used through smartphones. In addition, when the smartphone is connected to the drones, the data network with the outside is completely shut off. The control of the drone terminal is lost, which is a dangerous disadvantage to the drone flight operation.
따라서, 현재 일반인의 드론 운영은 사용자의 정성적 상식에 의존할 수밖에 없는 상황이며, 타인의 프라이버시 침해, 드론의 비행 범위 이탈 및 추락으로 인한 사고 및 고의적 테러의 도구로 사용될 수 있는 위험이 있다.Therefore, the general public's dron operation is dependent on the user's qualitative common sense, and there is a risk that it can be used as a tool of privacy infringement of another person, accident caused by drones' departure or fall, and deliberate terror.
따라서, 본 발명의 실시 예들은 드론과 조종자의 개별정보, 조종 단말의 명령 및 드론의 실시간 모니터링 비행 정보를 고려하여 위험 요인을 사전에 차단하거나 제한된 조건에서 운영하는 기술적 수단을 제안한다.Therefore, the embodiments of the present invention propose a technical means for operating the risk information in a limited or restricted condition in consideration of the individual information of the drones and the operator, the command of the control terminal, and the real-time monitoring flight information of the drones.
더불어, 본 발명의 실시 예들은 멀티 드론과 멀티 조종자 환경에 필요한 네트워크 구축을 위해 패킷 손실이 적고, 접속 안정성이 높은 드론, 가상화 서버 및 조종 단말의 각 포인트별 특정한 메쉬업 네트워크 구축을 위한 동적 소프트웨어 정의 네트워크를 제안한다.In addition, the embodiments of the present invention can be applied to a dron, a virtualization server having low packet loss, a high connection stability, and a dynamic software definition for establishing a specific mesh-up network for each point of a control terminal for network construction required for multi- Network.
이하에서는 도면을 참조하여 본 발명의 실시 예들을 구체적으로 설명하도록 한다. 다만, 하기의 설명 및 첨부된 도면에서 본 발명의 요지를 흐릴 수 있는 공지 기능 또는 구성에 대한 상세한 설명은 생략한다. 또한, 도면 전체에 걸쳐 동일한 구성 요소들은 가능한 한 동일한 도면 부호로 나타내고 있음에 유의하여야 한다.Hereinafter, embodiments of the present invention will be described in detail with reference to the drawings. In the following description and the accompanying drawings, detailed description of well-known functions or constructions that may obscure the subject matter of the present invention will be omitted. It should be noted that the same constituent elements are denoted by the same reference numerals as possible throughout the drawings.
도 1은 본 발명의 일실시예에 따른 멀티 드론 제어 시스템의 구성을 개략적으로 나타내는 도면이다.1 is a view schematically showing a configuration of a multi-drone control system according to an embodiment of the present invention.
도 1을 참조하면, 본 발명의 일실시 예에 따른 멀티 드론 제어 시스템은 가상화 서버(100) 및 가상 드론 에이전트(200)를 포함하여 구성된다.Referring to FIG. 1, a multidron control system according to an embodiment of the present invention includes a
본 발명의 멀티 드론 제어 시스템은 단일 기술로 구현이 어려우며, 융복합 기술을 사용하여 구축된 기술 셋(set)으로 구성된다.The multidron control system of the present invention is difficult to implement with a single technology and consists of a set of technologies built using fusion complex technology.
가상화 서버(100)는 먼저, 도 2에 도시된 바와 같이 비행 허용 구간인 실제 공간에 대해 가상의 공간을 정의하고, 가상 드론 에이전트(200, 210, 230)를 운영한다.The
가상화 서버(100)는 패킷을 직접 처리하고, 동적 소프트웨어 정의 네트워크(Dynamic SDN: Software define network)를 정의하기 위해, 서버 자체가 AP 시뮬레이터(Access Point Simulator) 모듈을 탑재하고 있다. 동적 소프트웨어 정의 네트워크에 대해서는 하기에서 상세히 설명하기로 한다.The
가상화 서버(100)는 드론 조종자가 사전에 등록한 조종자 개별정보 및 드론 개별정보를 받아 실시간으로 드론 에이전트(200)를 생성한다.The
가상화 서버(100)는 예를 들어, 클라우드 시스템으로 구현될 수 있고, 조종자가 드론 등록 시 입력한 조종자 개별정보, 드론 개별정보 및 해당 지역의 비행 정책 정보를 클라우드 서버에 저장할 수 있다.The
여기서, 조종자 개별정보는 조종자의 개인정보, 드론 비행 자격 유무, 조종자의 드론 비행 경력 등을 포함할 수 있다. 또한, 조종자 개별정보는 드론 운행 년차, 드론 운행 횟수, 드론 비행 시 사고 이력, 드론 비행 대회 진출 이력, 드론 비행 테스트 레벨, 등급 중 적어도 하나를 더 포함할 수 있다.Here, the individual information of the driver may include personal information of the driver, presence or absence of the dragon flight qualification, a pilot's drone flight history, and the like. In addition, the individual control information may further include at least one of a drone operation year, a drone operation frequency, an accident history at a drone flight, a drone flight competition history, a drone flight test level, and a grade.
그리고, 드론 개별정보는 드론의 등록정보(명칭, 제조사, 운행 성능표 등을 포함), 드론의 노후 정도 및 드론의 개조유무 등을 포함할 수 있다. 또한, 드론 개별정보는 구체적인 드론의 사양 즉, 드론의 무게, 크기, 날개개수, 탑재된 카메라의 화소 및 화질, 최대주행가능거리, 배터리 지속시간 등의 정보를 포함할 수 있다.The dron individual information may include registration information (including name, manufacturer, performance performance table, etc.) of the drones, the degree of drones 'retirement, and the drones' remodeling. Further, the individual information of the drone may include information of the specific drone specification such as the weight of the drone, the size, the number of wings, the pixel and image quality of the mounted camera, the maximum travelable distance, and the battery duration.
해당 지역의 비행 정책 정보는 비행 제한 고도 및 비행 제한 최고 속도 등을 포함할 수 있다.Flight policy information in your area may include flight limit altitude and maximum flight limit.
특히, 가상화 서버(100)는 위와 같은 조종자 개별정보 및 드론 개별정보에 따라 멀티 드론을 몇 개의 등급으로 나누고, 드론 등급에 따라 조종 단말 및 드론의 비행에 대해 차별적인 관제를 운용할 수 있다.Particularly, the
이때, 가상화 서버(100)는 가상화된 비행 구역에 등록하는 드론 및 조종자의 개별정보와 실시간 비행 모니터링 정보를 기반으로 해당 드론 시뮬레이터를 실시간으로 생성할 수 있다. 또한, 가상화된 비행 구역에서 드론이 철수됨에 따라 해당 드론 시뮬레이터를 소멸할 수도 있다.At this time, the
이를 위해, 가상화 서버(100)는 가상화된 비행구역이 표시된 영상에 실제 드론들의 비행을 영상화하여 표시할 수 있고, 각 드론들의 개별정보나 실시간 모니터링 정보에 대한 내용을 함께 표시하여 나타낼 수 있다.For this purpose, the
구체적인 예를 들면, 멀티 드론으로 아크로벳을 실행하거나, 복수의 드론을 조 단위로 나누어 비행하거나, 훈련 및 공공/군의 목적으로 멀티 드론을 운용할 시, 조종자의 운행 능력, 드론의 사양이나 성능이 비슷한 드론들, 즉 동일한 등급의 드론들끼리 모아서 관제함으로써, 효율적이고 보다 안전한 드론 운용을 실행할 수 있다. 이때, 드론의 등급에 따라 멀티 드론을 서로 다른 가상의 공간에 분리하여 비행을 통제할 수 있다.For example, when performing acrobatics with a multidron, flying a group of multiple drones, or operating a multi-drone for training and public / military purposes, the operator's ability to operate, By collecting and controlling similar drones, that is, drones of the same class, it is possible to perform efficient and safer dron operation. At this time, it is possible to control the flight by separating the multidrons into different virtual spaces according to the degree of the drones.
또한, 장거리 비행을 목적으로 멀티 드론을 운용할 시, 장거리 비행에 필요한 주요 요건인 배터리 지속시간, 모터 사양, 최대주행가능 거리, 조종자의 운행 능력을 기준으로 드론을 등급별로 나누어 동일한 등급끼리 드론들을 나누어 운용할 수 있다.In addition, when operating a multi-drone for long distance flight, the drones are divided into grades based on battery duration, motor specification, maximum travelable distance, and maneuvering ability, It can be divided and operated.
아울러, 드론 비행 허가 구역을 드론 등급별로 액세스 가능한 등급별 비행 구역으로 나누어 관리함으로써, 드론 비행의 혼선을 방지할 수 있다. 여기서, 드론 비행 허가 구역을 드론 등급별로 나눌 때, 송전탑이나 위험 건물 등과 같은 위험요소에 인접한 구역일수록 높은 등급의 드론들에 대해서만 비행을 허용하고, 상대적으로 안전한 구역일수록 낮은 등급의 드론들에 대해서만 비행을 허용함으로써, 보다 안전하고 효율적으로 멀티 드론을 운용할 수 있다.In addition, it is possible to prevent the confusion of the drone flight by managing the drone flight permission area divided into the grade flight areas accessible by the drone level. Here, when the drone flight permission area is divided by the drone grade, the area adjacent to the dangerous elements such as the transmission tower or the dangerous building is allowed to fly only for the high grade drones, while the relatively safe area is only for the low grade drones It is possible to operate the multi-drone more safely and efficiently.
드론 조종 단말(400)은 가상화 서버(100)의 AP를 통해 가상 드론 에이전트(200)에 1:1로 매칭되어 연결된다. 도 2에서와 같이 GPS(또는 실내 겸용을 위해 실시간 위치 추적 시스템(RTLS: Real time locating system) 좌표를 이용한 가상 공간 선언 서비스가 동작한다.The
가상 드론 에이전트(200)는 조종 단말(400)로부터 조종자가 드론(300)에 보내는 명령을 수렴한다. 가상 드론 에이전트(200)는 여러 상용 드론의 명령구문을 해석하기 위해 프로토콜이 정의되어 있다. 이를 위해, 가상 드론 에이전트(200)는 드론의 제조사별로 상이한 명령체계에 따라 실시간으로 가상화 서버(100)로부터 해당 프로토콜을 지원받을 수 있다.The
또한 가상 드론 에이전트(200)는 아날로그 신호와 디지털 신호를 변환하고 전달하기 위해 A-D, D-A 프로토콜 컴포넌트를 가지고 있다.The
가상 드론 에이전트(200)는 예를 들어, Parrot군(유럽회사), DJI군(중국회사), DIY(자작 또는 기타) 등으로 명령에 따른 신호에 따라 Digital to Digital, Analog to Digital, Digital to Analog 형태로 명령 데이터를 변환한다.The
가상 드론 에이전트(200)는 조종 단말(400)의 조종 정보, 조종 명령 데이터, 조종 시간 및 드론(300)의 실시간 비행, 위치 및 상태 등에 대해 실시간으로 모니터링하고, 실시간 모니터링 정보를 가상화 서버(100)로 전달한다.The
또한, 가상 드론 에이전트(200)는 드론(300)에 대한 등록증 정보, 조종자 및 드론의 개별정보 등을 가상화 서버(100)로부터 확인할 수 있다.In addition, the
구체적으로, 가상 드론 에이전트(200)는 드론(300)의 비행 제한 구역 이탈, 타 드론과의 충돌, 제한 구역 침범, 비행 조종 미숙 등을 탐지한다.Specifically, the
여기서 비행 제한 사항은 가상 비행 공간 영역 이내에서 비행해야 하는 규칙뿐만 아니라, 비행 속도, 비행 높이 및 총 비행 거리 등에 대해서도 제한 사항이 설정될 수 있다.Here, the flight restrictions may set restrictions on flight speeds, flight heights, and total flight distances, as well as rules that must flow within the virtual flight space area.
조종 단말(400)의 조종 정보는 Roll, Pitch, Yaw, Power 등의 조종 신호를 포함할 수 있다.The steering information of the
가상 드론 에이전트(200)는 드론(200)과의 통신에서 드론의 실시간 위치 정보를 수렴한다. 위치정보는 고도, 경도 및 위도를 포함하고, 좌표로 나타낼 수 있다. 또한, 가상 드론 에이전트(200)는 드론(300)의 상태 정보를 드론(200)에 탑재된 실시간 위치 추적 시스템(RTLS), 카메라, GPS/Navigation, 자이로 센서(Gyro), 가속도 센서(Accelerator) 등의 데이터를 수신하여 획득할 수 있다.The
가상 드론 에이전트(200)는 드론(200)의 이상 비행, 조종 단말(400)의 이상 조종 명령이 탐지된 경우, 드론(200)을 비행 허용 구역 내에 머무르도록 제어하거나, 비행을 중지시키고 드론(200)을 착륙시킬 수 있다. 이는 가상화 서버(100)로부터 수신된 제어 명령에 따르는 실행일 수 있다.The
멀티 드론의 안전, 보안을 위한 운행 및 군집 제어를 위해 드론(200) 및 조종 단말(400)은 조종 단말(400)의 명령보다 가상 드론 에이전트(200)의 명령을 우선적으로 실행하도록 설계될 수 있다.The
도 3은 본 발명의 실시예에 따른 드론(300)의 구성을 도시하는 블록도이다.3 is a block diagram showing the configuration of the
도 3을 참조하면, 본 발명의 실시 예에 따른 드론(300)은 제어부(310), 통신부(320), 브릿지 모듈(330), GPS 모듈(340), GYRO/ACCEL 모듈(350), 카메라 모듈(360) 및 가입자 식별모듈(370)을 포함하여 구성된다.3, the
제어부(310)는 본 발명의 드론 운용을 위한 운영체제 또는 응용 프로그램을 구동하여 제어부(310)에 연결된 다수의 하드웨어 또는 소프트웨어 구성요소들을 제어할 수 있고, 각종 신호를 포함한 데이터 처리 또는 연산을 수행할 수 있으며, 드론의 타 구성 요소들의 동작을 제어할 수 있다.The
통신부(320), 브릿지 모듈(330), GPS 모듈(340), GYRO/ACCEL 모듈(350), 카메라 모듈(360) 및 가입자 식별모듈(370)을 제어하며 드론(300)의 비행을 제어한다. 제어부(310)는 통신부(320)를 통해 드론(300)을 인증하거나, 드론(300)의 위치정보 및 모니터링 정보를 가상화 서버(100)로 전송할 수 있다.Controls the flight of the
제어부(310)는 본 발명의 목적에 따라 멀티 드론을 안전하게 운용하기 위하여, 가상 드론 에이전트(200)로부터 수신된 명령을 조종 단말(400)로부터 수신된 조종 명령보다 우선하여 따르도록 설계될 수 있다. 이에 따라, 조종 단말(400)의 위험한 조종 명령을 차단할 수 있다.The
통신부(320)는 조종 단말(400) 또는 가상 드론 에이전트(200)로부터 명령을 수신하고, 드론의 모니터링 정보를 가상 드론 에이전트(400)로 전송한다.The
통신부(320)는 조종 단말(400)과 보통 블루투스 네트워크로 연결되고, 브릿지 모듈(330)과 1:1 WiFi로 연결된다.The
브릿지 모듈(330)은 통신부(320)를 통해 수신된 데이터를 소프트웨어 정의 네트워크(SDN)를 기반으로 가공하여 변환된 전송방식으로 처리한다. 여기서 소프트웨어 정의 네트워크(Software define network)는 실제 네트워크 기능을 모두 소프트웨어가 통제하는 기술로서, 네트워크 장비를 제어하는 소프트웨어는 설계자가 원하는 방식대로 수정할 수 있다.The
브릿지 모듈(330)은 WiFi to mash Network Bridge로서, 가상 드론 에이전트(200)와 기본적으로 블루투스 네트워크를 사용하고, 이 외에 UWB(Ultra-Wideband communication)을 사용할 수 있다. 예를 들어, 브릿지 모듈(330)은 블루투스에서 와이파이로 데이터를 변환하는 모듈(Bluetooth to WiFi Data converter module)일 수 있다.The
브릿지 모듈(330)의 알고리즘은 동적 데몬 주소 맵핑(Dynamic Demon Address Mapping)과, 공유 맵핑 데이터(Mapping Data Sharing with others) 및 네트워크 모듈의 회로를 검사할 때 사용하는 소프트웨어인 비젼 구성(Vision composer)을 포함한다.The algorithm of the
보통, 드론(300)은 구조상 조종 단말(400)로부터 지속적인 신호를 수신하여 운행하게 되는데, 이러한 방법은 시그널 전송 실패가 발생할 여지가 높다.Generally, the
따라서, 본 발명은 이러한 문제를 해결하기 위해 브릿지 모듈(330)을 구비하여, 조종 단말(400)에서 보낸 1단위의 비동기 명령을 브릿지 모듈(330)을 통해 와이파이 데이터로 변환하여, 드론(300)이 명령을 완수할 때까지 제어부(310)에 지속적인 신호를 발신하게 된다.Accordingly, in order to solve such a problem, the present invention includes a
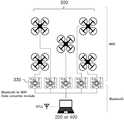
구체적으로, 도 4를 참조하여 근거리 네트워크를 위한 통신 구축 기술을 설명하자면, 조종 단말(400) 또는 가상 드론 에이전트(200)와 드론(300)간의 거리가 10m 이내의 근거리인 경우, 조종 단말(400) 또는 가상 드론 에이전트(200)와 드론(300)은 블루투스로 연결되고, 드론(300)은 블루투스로 수신된 데이터를 브릿지 모듈(330)을 통해 가공하여 WiFi 네트워크로 데이터를 전송한다.4, when the distance between the
예를 들어, 조종 단말(400)이 이동하고자 하는 1단위의 비동기 명령을 보내고자, NE 방향으로 1m를 이동시키기 위한 명령인 [N:100, E:100, S:0, W:0, H:0, R:90]을 블루투스를 통해 1회만 통신부(320)로 전송할 경우, 브릿지 모듈(330)은 블루투스 데이터를 와이파이 신호로 변환하여 드론(300)이 NE방향으로 1m(100cm)를 이동할 때 까지 지속적인 신호를 발신하게 된다.100, S: 0, W: 0, H: 0) to move 1m in the NE direction in order to send one unit of asynchronous command to move the
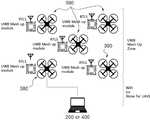
한편, 도 5를 참조하여 원거리 네트워크를 위한 통신 구축 기술을 설명하자면, 도 5에서는 1개의 메인 드론(380)과 나머지 여러 대의 서브 드론(390)을 비동기 메쉬업 네트워크를 통해 운영한다. 메인 드론은 조종 단말(400) 또는 가상 드론 에이전트(200)로부터 명령을 수신하고, 수신된 명령을 서브 드론(390)에 공유하는 역할을 한다.Referring to FIG. 5, a communication establishing technique for a long-distance network will be described. In FIG. 5, one
드론들(300)과 조종 단말(400) 또는 가상 드론 에이전트(200) 간의 거리가 100m 이상 3km 이내의 원거리일 경우, 조종 단말(400) 또는 가상 드론 에이전트(200)와 메인 드론(380)은 WiFi를 통해 연결된다.When the distance between the
그리고, 메인 드론(380)과 서브 드론(390)은 UWB-UWB(또는 LTE Direct-LTE Direct)인 메쉬업(mash up) 비동기 네트워크로 연결된다.The
이를 위해 드론(300)에는 UWB 통신 모듈이 탑재되며, 드론들 간 위치 정보, 비행 일정을 공유하게 된다.To this end, the
GPS 모듈(340)은 드론(300)의 위치 정보를 획득한다. 위치 정보는 고도, 경도, 위도의 정보를 포함할 수 있다.The
GYRO/ACCEL 모듈(350)은 드론(300)의 방위 변화를 측정하고, 드론(300)의 가속도, 진동, 충격 등의 동적 힘을 측정한다.The GYRO /
카메라 모듈(360)은 제어부(310)에 의해 수신되는 사진 또는 동영상 촬영 명령에 따라 영상을 촬영한다.The
가입자 식별모듈(370)은 드론(300)을 가상화 서버(100)에 인증하기 위한 구성으로서, 가상 드론 에이전트(200)를 이용하는 드론(300)의 고유 식별 정보가 저장되어 있다.The
한편, 본 발명의 멀티 드론 제어 시스템은 패킷 손실을 줄이고 접속 안정성을 높이기 위해 가상 드론 에이전트(200)와 드론(300)간, 가상 드론 에이전트(200)와 조종 단말(400)간의 특정한 메쉬업 네트워크 구축을 위해 동적 소프트웨어 정의 네트워크를 제안한다.The multidron control system according to the present invention may be configured to perform a specific mesh-up network establishment between the
도 6은 본 발명의 실시 예에 따른 동적 소프트웨어 정의 네트워크의 개략적인 구성을 도시한 도면이고, 도 7은 본 발명의 실시 예에 따른 네트워크 모듈 간의 연결 방법을 도시한 도면이다.FIG. 6 is a diagram illustrating a schematic configuration of a dynamic software definition network according to an embodiment of the present invention, and FIG. 7 is a diagram illustrating a connection method between network modules according to an embodiment of the present invention.
현재의 드론 또는 로봇의 운용 기법으로서 네트워크의 전용과 대역폭을 확보하기 위해 WiFi 또는 WiFi Direct 네트워크 구성 방법을 사용하고 있다. 이 네트워크 방법은 1:1 연결에서 안정성을 보장하지만, 외부 네트워크와의 단절로 인한 문제가 있다.We use WiFi or WiFi Direct network configuration method to secure dedicated network and bandwidth as current drone or robot operation technique. This networking method guarantees stability in 1: 1 connection, but there is a problem due to disconnect from external network.
이러한 문제를 해결하기 위해 본 발명은 도 6 및 도 7에 도시된 바와 같이, 복수개의 상이한 네트워크 방식을 채용하여 대역폭을 보장하면서, 드론의 이상 유무를 탐지하고 운영 정책을 적용할 수 있으며, 외부 네트워크를 연결하여 필요한 정보를 실시간으로 이용할 수 있는 동적 소프트웨어 정의 네트워크를 구성한다.In order to solve this problem, as shown in FIG. 6 and FIG. 7, the present invention adopts a plurality of different network schemes to detect the presence or absence of drones and to apply an operational policy while ensuring bandwidth, To construct a dynamic software defined network that can use the necessary information in real time.
도 6을 참조하면, 본 발명의 실시 예에 따른 동적 소프트웨어 정의 네트워크는 멀티 드론(510), 브릿지 모듈(530), 가상 드론 에이전트(550), 가상화 서버(570) 및 조종 단말(590)의 연결을 나타낸다.Referring to FIG. 6, a dynamic software definition network according to an embodiment of the present invention includes a
도 6에서 드론(510)과 브릿지 모듈(530) 간의 연결 B는 드론의 조종뿐만 아니라 고품질 비디오를 위해 기존과 같은 최대 대역폭이 확보되어야 한다. 따라서 기존과 동일한 WiFi/WiFi-D 방식을 유지해야 한다.In FIG. 6, the connection B between the
조종 단말(590)이 가상 드론 에이전트(550)에 접근하여 가상 드론 에이전트(550)와 조종 단말(590)간의 연결 D를 구성할 경우, 가상 드론 에이전트(550)는 자동으로 가상 드론 에이전트(550)와 가상화 서버(570) 간의 연결 A를 통해 정보를 취득하게 된다. 여기서 정보는 드론의 개별정보 및 조종자의 개별정보를 포함한다. 이때 가상 드론 에이전트(550)와 조종 단말(590) 간의 연결 D의 맥 어드레스(Mac Address)를 통해 키(key)값을 조회하게 된다. 가상 드론 에이전트(550)와 가상화 서버(570) 간의 연결 A의 네트워크 방식은 WiFi/Local LAN/3G/4G/LTE 등으로 제한이 없다.When the
여러 드론의 연결 또는 연결 해제를 위해 가상 드론 에이전트(550)와 조종 단말(590) 간의 연결 D에 따라 가상 드론 에이전트(550)는 패킷 중계 데몬(demon)을 동적으로 생성 또는 폐기(또는 회수)하게 된다.The
브릿지 모듈(530)과 가상 드론 에이전트(550) 간의 연결 C는 다음의 두 가지 조건을 만족해야 한다. 먼저, 지연시간이 미리 설정된 소정 시간 이내가 되도록 조종 정보를 전송하고, 고용량 컨텐츠 데이터의 저장 위치 지정에 따라 전송한다. 여기서 조종 정보는 비행 모니터링 정보를 일컫는다. The connection C between the
가상 드론 에이전트(550)와 브릿지 모듈(530)과의 1:N의 연결을 위해, 가상 드론 에이전트(550)와 가상화 서버(570) 간의 연결 A를 통해 가상 드론 에이전트(550)에 생성된 패킷 중계 데몬과 브릿지 모듈(530)이 연결 된다.The connection between
여러 드론이 동시에 접근할 경우, 그 수에 맞는 패킷 중계 데몬을 취득하는 방식은 시간 우선 쟁탈 방식으로 구현된다. 기본적으로는 블루투스(Bluetooth) 네트워크를 사용한다. AP(Access point)로 운영되는 상용 기성품 드론을 연결하기 위해 Bluetooth to WiFi Bridge를 사용한다.When several drones are approaching at the same time, the method of acquiring the packet relay daemon corresponding to that number is implemented as a time priority contending method. Basically, it uses a Bluetooth network. Bluetooth to WiFi Bridge is used to connect a commercial off-the-shelf drones operating as AP (Access Point).
가상 드론 에이전트(550)와 조종 단말(590) 간의 연결 D는 기존에 제조사가 제공하는 프로그램을 통해 이루어지며, 별도의 개조나 추가적인 프로그램 설치를 필요로 하지 않는다. 연결 D는 와이파이를 기본으로 하며, 제조사의 스위칭에 따라 WiFi-D도 사용할 수 있다. 다만, 직접 비디오 컨텐츠를 받아볼 필요가 없기 때문에 고 대역폭의 네트워크(5G)를 사용할 필요가 없다.The connection D between the
즉, 본 발명은 제조사가 제공하는 드론과 컨트롤 프로그램(또는 앱)을 그대로 사용하기 위해 메쉬업을 사용하여 외부 네트워크를 함께 구성하는 기술이며, 따라서 드론을 통해 생성된 컨텐츠의 실시간 방송 등 기존에 불가능했던 컨텐츠 전송방식도 구현할 수 있다.That is, the present invention is a technology for constructing an external network together by using a mesh-up to use a drones and a control program (or an app) provided by a manufacturer, and accordingly, You can also implement the content transfer method you did.
이를 위해 동적 소프트웨어 정의 네트워크 아키텍쳐를 도입하여 각 브릿지별 최적화된 네트워크를 구축하게 된다. 기성품 드론에 이미 적용된 기존 네트워크는 유지하지만, 이에 추가된 네트워크 브릿지 모듈과 네트워크 스위치는 새로운 메쉬업 네트워크를 구축한다.To this end, a dynamic software defined network architecture is introduced to construct an optimized network for each bridge. While retaining existing networks already applied to off-the-shelf drones, the additional network bridge modules and network switches build a new mesh-up network.
종래에는 본원발명과 같은 Bluetooth to WiFi 브릿지 모듈이 아니라 와이파이 라우터(WiFi Router)를 이용했다. 와이파이 라우터는 외부 네트워크를 연결하기 위해서 또 다른 무선 네트워크를 연결하기 위한 네트워크 장비이다. 그러나, 높은 패킷 손실율과 끊김 현상으로 현실적으로 사용이 어려운 문제가 있으며, 무엇보다 대역폭의 한계로 동시 사용자가 이용할 수 없는 문제가 있다.In the past, a WiFi router was used instead of the Bluetooth to WiFi bridge module according to the present invention. The Wi-Fi router is a network device for connecting another wireless network to connect an external network. However, there is a problem that it is difficult to use in reality due to a high packet loss rate and a disconnection phenomenon.
구체적으로, 본 발명의 실시 예에 따른 동적 소프트웨어 정의 네트워크 기반의 멀티 드론 제어 방법에 대해 설명하자면,Specifically, a dynamic software defined network-based multidron control method according to an embodiment of the present invention will be described.
먼저, 가상 드론 에이전트(550)가 드론(510)의 통신부 또는 조종 단말(590)로부터 수신한 비행 모니터링 정보를 가상화 서버(570)로 전달한다.First, the
다음으로, 가상화 서버(570)가 비행 모니터링 정보를 분석하여 비행 제어 신호를 생성하고, 상기 비행 제어 신호를 가상 드론 에이전트(550)로 전달한다.Next, the
가상 드론 에이전트(550)가 비행 제어 신호를 드론(510)의 통신부로 전달한다.The
드론(510)의 통신부가 비행 제어 신호를 변환하여 드론 내에 구비된 브릿지 모듈(530)에 전달한다.The communication unit of the
이와 같은 본 발명의 실시 예에 의하면, 가상 드론 에이전트(550) 및 가상화 서버(570)로 구현된 실시간 관제 센터를 통해 드론 운영뿐만 아니라 드론 비행을 기록하고, 기록을 저장하며, 저장된 기록을 추출하는 실행이 가능하다.According to the embodiment of the present invention, the drone operation can be performed through the real-time control center implemented by the
또한, 드론 실명제를 도입하여 가상 드론 에이전트(550) 및 가상화 서버(510)가 드론이 인증된 경우에만 비행을 허여함으로써, 드론 비행 제도를 보완하는 시스템으로서의 적용도 가능하다.Also, the system can be applied as a system for supplementing the drone flight system by introducing the drone real name system and allowing the
더불어, 가상화 서버, 가상 드론 에이전트, 드론의 통신부 및 브릿지 모듈의 각 포인트 별 특정한 메쉬업 네트워크 방법을 사용함으로 인하여, 원격지에서의 드론 운영을 가능하게 한다. 이와 같은 기술로 인해 예를 들어, 원거리에서의 영화나 방송과 같은 컨텐츠 제작이나, 비행기 운영에서의 관제 센터 역할로서 활용할 수 있다.In addition, by using a specific mesh-up network method for each point of the virtualization server, the virtual drones agent, the communication portion of the drones, and the bridge module, it is possible to operate the drones at a remote location. With such a technology, for example, it can be used as a control center for production of contents such as movies and broadcasts at a long distance, and airplane operations.
아울러, 드론의 비행 제한 및 관제뿐만 아니라, 드론 간의 충돌, 타 조종자의 미숙으로 인한 조종자 사고 등을 미연에 방지할 수 있으며, 비전문가들을 대상으로 한 드론 조종 교육에 활용할 수 있다.In addition, it is possible to prevent not only dragon flight restriction and control, but also collision between drones, maneuver accident caused by immaturity of other operators, and can be used for drone pilot training for non-experts.
한편, 본 발명의 실시 예들은 컴퓨터로 읽을 수 있는 기록 매체에 컴퓨터가 읽을 수 있는 코드로 구현하는 것이 가능하다. 컴퓨터가 읽을 수 있는 기록 매체는 컴퓨터 시스템에 의하여 읽혀질 수 있는 데이터가 저장되는 모든 종류의 기록 장치를 포함한다.Meanwhile, the embodiments of the present invention can be embodied as computer readable codes on a computer readable recording medium. A computer-readable recording medium includes all kinds of recording apparatuses in which data that can be read by a computer system is stored.
컴퓨터가 읽을 수 있는 기록 매체의 예로는 ROM, RAM, CD-ROM, 자기 테이프, 플로피디스크, 광 데이터 저장장치 등의 형태로 구현하는 것을 포함한다. 또한, 컴퓨터가 읽을 수 있는 기록 매체는 네트워크로 연결된 컴퓨터 시스템에 분산되어, 분산 방식으로 컴퓨터가 읽을 수 있는 코드가 저장되고 실행될 수 있다. 그리고 본 발명을 구현하기 위한 기능적인(functional) 프로그램, 코드 및 코드 세그먼트들은 본 발명이 속하는 기술 분야의 프로그래머들에 의하여 용이하게 추론될 수 있다.Examples of the computer-readable recording medium include ROM, RAM, CD-ROM, magnetic tape, floppy disk, optical data storage, and the like. In addition, the computer-readable recording medium may be distributed over network-connected computer systems so that computer readable codes can be stored and executed in a distributed manner. In addition, functional programs, codes, and code segments for implementing the present invention can be easily deduced by programmers skilled in the art to which the present invention belongs.
이상에서 본 발명에 대하여 그 다양한 실시 예들을 중심으로 살펴보았다. 본 발명에 속하는 기술 분야에서 통상의 지식을 가진 자는 본 발명이 본 발명의 본질적인 특성에서 벗어나지 않는 범위에서 변형된 형태로 구현될 수 있음을 이해할 수 있을 것이다. 그러므로 개시된 실시 예들은 한정적인 관점이 아니라 설명적인 관점에서 고려되어야 한다. 본 발명의 범위는 전술한 설명이 아니라 특허청구범위에 나타나 있으며, 그와 동등한 범위 내에 있는 모든 차이점은 본 발명에 포함된 것으로 해석되어야 할 것이다.The present invention has been described above with reference to various embodiments. It will be understood by those skilled in the art that various changes in form and details may be made therein without departing from the spirit and scope of the invention as defined by the appended claims. Therefore, the disclosed embodiments should be considered in an illustrative rather than a restrictive sense. The scope of the present invention is defined by the appended claims rather than by the foregoing description, and all differences within the scope of equivalents thereof should be construed as being included in the present invention.
100: 가상화 서버200: 가상 드론 에이전트
300: 드론400: 조종 단말
330: 브릿지 모듈380: 메인 드론
390: 서브 드론510: 멀티 드론
530: 브릿지 모듈550: 가상 드론 에이전트
670: 가상화 서버590: 조종 단말
410: 제어부420: 통신부
430: 브릿지 모듈440: GPS 모듈
450: GYRO/ACCEL 모듈460: 카메라 모듈
470: 가입자 식별 모듈100: Virtualization Server 200: Virtual Drones Agent
300: Drones 400: Control terminal
330: Bridge module 380: Main drones
390: Subdrone 510: Multidron
530: Bridge module 550: Virtual drones agent
670: Virtualization server 590: Manipulating terminal
410: control unit 420:
430: Bridge module 440: GPS module
450: GYRO / ACCEL module 460: Camera module
470: Subscriber Identity Module
Claims (21)
Translated fromKorean상기 드론의 실시간 모니터링 정보를 수렴하여 상기 가상화 서버에 전달하고, 상기 드론 제어 명령에 따라 상기 드론의 비행을 제어하는 가상 드론 에이전트;를 포함하고,
상기 가상화 서버는,
드론의 등급에 따라 조종 단말 및 드론의 비행에 대해 차별적인 관제를 운용하되 상기 비행 허가 구역을 상기 등급별로 액세스 가능한 등급별 비행 구역으로 나누어 관리함으로써, 복수 개의 드론을 상기 가상 공간에 분리하여 비행을 통제하는, 멀티 드론 제어 시스템.A drone control command is generated by analyzing individual information about a drone and a pilot, real-time monitoring information of the drone, and flight policy information of a corresponding region, and generating a drone control command according to the analysis, A virtualization server for creating the corresponding drone simulator in real time based on the individual information of the drone and the operator, the real-time flight monitoring information, and the virtual space; And
And a virtual drones agent for collecting real-time monitoring information of the drones and delivering the information to the virtualization server, and controlling the drones according to the dron control command,
The virtualization server includes:
The drones are managed in accordance with the rating of the drones, and the drones are divided into the accessible flight zones classified by the grade, so that the plurality of drones are separated into the virtual space, A multi-drone control system.
상기 조종자 개별정보는,
조종자의 개인정보, 드론 비행 자격 유무, 조종자의 드론 비행 경력 , 드론 운행 년차, 드론 운행 횟수, 드론 비행 시 사고 이력, 드론 비행 대회 진출 이력, 드론 비행 테스트 레벨, 등급 중 적어도 하나를 포함하는, 멀티 드론 제어 시스템.The method according to claim 1,
Wherein the navigator individual information comprises:
A drone flight test level, and a grade, including at least one of the personal information of the pilot, the presence or absence of the drone flight, the pilot's drone flight history, the drone operation year, the drone operation frequency, Drone control system.
상기 드론 개별정보는,
드론의 명칭, 제조사, 운행 성능표, 드론의 노후 정도 및 드론의 개조유무, 드론의 무게, 크기, 날개개수, 탑재된 카메라의 화소 및 화질, 최대주행가능거리, 배터리 지속시간 중 적어도 하나를 포함하는 멀티 드론 제어 시스템.The method according to claim 1,
The dron individual information includes:
The name of the dron, the maker, the driving performance table, the degree of aging of the dron and the modification of the dron, the weight of the drones, the size, the number of wings, the pixel and image quality of the mounted camera, the maximum travelable distance, Lt; / RTI >
상기 가상화 서버는,
드론 비행 허가 구역을 드론 등급별로 액세스 가능한 등급별 비행 구역으로 나눌 때, 위험요소에 인접한 구역일수록 상대적으로 높은 등급의 드론들에 대해서만 비행을 허용하도록 관리하는, 멀티 드론 제어 시스템.The method according to claim 1,
The virtualization server includes:
A multi-drone control system that manages to permit flights only to relatively high-grade drones adjacent to hazardous areas, when dividing the drone flight clearance into accessible graded flight zones by drone rating.
상기 가상 드론 에이전트는,
서로 다른 복수의 상용 드론의 명령구문을 해석하기 위해 드론의 제조사별로 상이한 명령체계에 따라 실시간으로 상기 가상화 서버로부터 해당 프로토콜을 지원받는, 멀티 드론 제어 시스템.The method according to claim 1,
The virtual drones agent,
And the protocol is supported from the virtualization server in real time according to a different command system for each manufacturer of the drone in order to analyze command syntax of a plurality of commercial drones.
상기 가상 드론 에이전트는,
상기 드론의 실시간 위치 정보, 비행 제한 구역 이탈, 타 드론과의 충돌, 제한 구역 침범, 비행 조종 미숙 중 적어도 하나를 탐지하는, 멀티 드론 제어 시스템.The method according to claim 1,
The virtual drones agent,
A multi-drone control system for detecting at least one of real-time location information of the drones, departure of a restricted area, collision with a tardor, restricted area invasion, and flight control immaturity.
상기 드론의 실시간 모니터링 정보는,
상기 드론에 탑재된 실시간 위치 추적 시스템(RTLS), 카메라, GPS/Navigation, 자이로 센서(Gyro), 가속도 센서(Accelerator) 중 적어도 하나의 데이터로부터 획득하는, 멀티 드론 제어 시스템.The method according to claim 1,
The real-time monitoring information of the drones,
From a data of at least one of a Real Time Positioning System (RTLS), a camera, a GPS / Navigation, a Gyro sensor, and an Accelerator mounted on the drones.
상기 통신부를 통해 수신된 데이터를 소프트웨어 정의 네트워크(SDN)를 기반으로 가공하여 변환된 전송방식으로 처리하는 브릿지 모듈; 및
상기 브릿지 모듈로부터 수신된 명령에 따라 드론 비행을 제어하는 제어부;를 포함하여 구성되고,
상기 가상 드론 에이전트로부터 수신되는 명령은,
비행 허용 구역인 실제 공간에 대해 복수 개의 서로 다른 가상 공간으로 분리하여 정의하고, 드론 및 조종자의 개별정보에 기반하여 분류된 드론의 등급에 따라 상기 비행 허가 구역을 상기 등급별로 액세스 가능한 등급별 비행 구역으로 나누어 관리함으로써, 복수 개의 드론을 상기 가상 공간에 분리하여 비행을 통제하는 드론 제어 명령으로 구성되는, 드론.A communication unit for receiving an instruction from the control terminal or the virtual drones agent and transmitting monitoring information of the drones to the virtual drones agent;
A bridge module for processing data received through the communication unit based on a software defined network (SDN) and processing the converted data by a transmission scheme; And
And a controller for controlling the drone flight according to an instruction received from the bridge module,
Instructions received from the virtual drones agent,
A plurality of different virtual spaces are defined for the actual space that is the flight allowable zone and the flight allowed zones are classified into the accessible gradeable flight zones according to the class of the drone classified based on the individual information of the drone and the pilot And a plurality of drones are divided into the virtual space to control the flight.
상기 통신부는,
상기 조종 단말 또는 상기 가상 드론 에이전트와 블루투스 네트워크로 연결되고, 상기 브릿지 모듈은 Bluetooth to WiFi Data converter module로 구성되는, 드론.10. The method of claim 9,
Wherein,
Wherein the bridge module is connected to the control terminal or the virtual drone agent via a Bluetooth network, and the bridge module is configured by a Bluetooth to WiFi data converter module.
상기 브릿지 모듈은,
상기 조종 단말 또는 상기 가상 드론 에이전트에서 보낸 1단위의 비동기 명령을 와이파이 데이터로 변환하여, 상기 명령을 완수할 때까지 지속적인 신호를 상기 제어부에 발신하는, 드론.10. The method of claim 9,
The bridge module includes:
Unit asynchronous command sent from the control terminal or the virtual drone agent to Wi-Fi data, and transmits a continuous signal to the control unit until the command is completed.
상기 드론으로부터 상기 조종 단말 또는 상기 가상 드론 에이전트 간의 거리가 100m 이상 3Km 이내의 원거리일 경우, 멀티 드론을 메인 드론 및 서브 드론으로 구분하고,
상기 메인 드론은 상기 조종 단말 또는 상기 가상 드론 에이전트와 WiFi를 통해 연결되고,
상기 서브 드론은 상기 메인 드론과 UWB(Ultra-wideband communication)-UWB(또는 LTE Direct-LTE Direct)인 메쉬업(Mesh up) 비동기 네트워크로 연결되어, 상기 메인 드론으로부터 명령을 수신하여 공유하는, 드론.10. The method of claim 9,
When the distance between the drones and the control terminal or the virtual drones is in a range of 100 m or more and 3 km or less, the multidrone may be divided into main drones and sub drones,
The main drones are connected to the control terminal or the virtual drones agent through WiFi,
The sub-drone is connected to the main drone through a mesh-up asynchronous network that is an Ultra-wideband communication-UWB (or LTE Direct-LTE Direct), receives a command from the main drone, .
상기 제어부는,
상기 조종 단말의 명령보다 상기 가상 드론 에이전트로부터 수신된 명령을 우선적으로 실행하도록 설계되는, 드론.10. The method of claim 9,
Wherein,
Wherein the drones are designed to preferentially execute commands received from the virtual drones agent rather than commands from the manipulation terminal.
상기 가상화 서버가 상기 비행 모니터링 정보를 분석하여 비행 제어 신호를 생성하고, 상기 비행 제어 신호를 상기 가상 드론 에이전트로 전달하는 단계;
상기 가상 드론 에이전트가 상기 비행 제어 신호를 상기 드론의 통신부로 전달하는 단계; 및
상기 드론의 통신부가 상기 비행 제어 신호를 변환하여 상기 드론 내에 구비된 브릿지 모듈에 전달하는 단계를 포함하고,
상기 가상 드론 에이전트와 상기 브릿지 모듈과의 1:N의 연결을 위해, 상기 가상 드론 에이전트와 상기 가상화 서버 간의 연결을 통해 상기 가상 드론 에이전트에 생성된 패킷 중계 데몬과 상기 브릿지 모듈이 연결되는, 멀티 드론 제어 방법.Transmitting the flight monitoring information received from the communication unit or the control terminal of the drones to the virtualization server;
Analyzing the flight monitoring information to generate a flight control signal, and transmitting the flight control signal to the virtual drone agent;
The virtual drone agent transmitting the flight control signal to the communication unit of the drones; And
Wherein the communication unit of the drone converts the flight control signal and transmits the converted flight control signal to the bridge module provided in the drone,
Wherein the bridge module is connected to a packet relay daemon generated in the virtual drones agent through a connection between the virtual drones agent and the virtualization server for 1: N connection between the virtual drones agent and the bridge module, Control method.
상기 드론의 통신부와 상기 드론 내에 구비된 브릿지 모듈은,
최대 대역폭 확보를 위해 WiFi 또는 WiFi-D 방식으로 연결된, 멀티 드론 제어 방법.15. The method of claim 14,
The communication unit of the drones and the bridge module provided in the drones,
A multidron control method connected by WiFi or WiFi-D for maximum bandwidth.
상기 통신부와 상기 가상 드론 에이전트는 블루투스 네트워크로 연결되고, 상기 브릿지 모듈은 상기 블루투스 신호를 와이파이 신호로 변환하는, 멀티 드론 제어 방법.15. The method of claim 14,
Wherein the communication unit and the virtual drone agent are connected via a Bluetooth network, and the bridge module converts the Bluetooth signal into a Wi-Fi signal.
상기 가상 드론 에이전트와 상기 가상화 서버 간의 연결은,
맥 어드레스(Mac Address)를 통해 키(key)값을 조회함으로써 연결되고, WiFi/Local LAN/3G/4G/LTE 중 적어도 하나를 통해 연결되는, 멀티 드론 제어 방법.15. The method of claim 14,
Wherein the connection between the virtual drone agent and the virtualization server comprises:
And connected via at least one of WiFi / Local LAN / 3G / 4G / LTE by a key value inquiry through a MAC address.
상기 가상 드론 에이전트는,
여러 드론의 연결 또는 연결 해제를 위해 상기 가상 드론 에이전트와 상기 조종 단말 간의 연결에 따라 패킷 중계 데몬을 동적으로 생성 또는 폐기하는 단계를 더 포함하는, 멀티 드론 제어 방법.15. The method of claim 14,
The virtual drones agent,
Further comprising dynamically creating or discarding a packet relay daemon according to a connection between the virtual drones agent and the control terminal for connection or disconnection of the plurality of drones.
상기 가상 드론 에이전트는,
여러 대의 드론이 상기 가상 드론 에이전트에 동시에 접근할 경우, 시간 우선 쟁탈 방식으로 상기 패킷 중계 데몬을 취득하는 단계를 더 포함하는, 멀티 드론 제어 방법.15. The method of claim 14,
The virtual drones agent,
Further comprising the step of acquiring the packet relay daemon in a time priority contending manner when a plurality of drones simultaneously access the virtual drones agent.
상기 브릿지 모듈과 상기 가상 드론 에이전트는,
지연시간이 미리 설정된 소정 시간 이내가 되도록 상기 비행 모니터링 정보를 전송하는 조건에 만족하고, 상기 드론에서 생성된 고용량 컨텐츠 데이터의 저장 위치 지정에 따라서 연결되는, 멀티 드론 제어 방법.15. The method of claim 14,
Wherein the bridge module and the virtual drones agent,
The content is satisfied according to a condition for transmitting the flight monitoring information so that the delay time is within a predetermined time, and is connected according to the storage position designation of the high capacity content data generated by the drones.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160129075AKR101941643B1 (en) | 2016-10-06 | 2016-10-06 | System and method for control of multi drone |
| PCT/KR2016/012260WO2018066744A1 (en) | 2016-10-06 | 2016-10-28 | System and method for controlling multidrone |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020160129075AKR101941643B1 (en) | 2016-10-06 | 2016-10-06 | System and method for control of multi drone |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20180038231A KR20180038231A (en) | 2018-04-16 |
| KR101941643B1true KR101941643B1 (en) | 2019-01-23 |
Family
ID=61831530
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020160129075AActiveKR101941643B1 (en) | 2016-10-06 | 2016-10-06 | System and method for control of multi drone |
Country Status (2)
| Country | Link |
|---|---|
| KR (1) | KR101941643B1 (en) |
| WO (1) | WO2018066744A1 (en) |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107085385B (en)* | 2017-06-20 | 2020-05-08 | 中仿智能科技(上海)股份有限公司 | Simulation system and method for simulating autonomous flight of multiple aircrafts |
| KR102093734B1 (en)* | 2018-04-30 | 2020-03-26 | 경북대학교 산학협력단 | Unmanned aerial vehicle scenario test method using flight test profile |
| US11099557B2 (en)* | 2018-07-08 | 2021-08-24 | Eric Hanscom | Method of remotely obtaining drone footage |
| US10841509B2 (en) | 2018-10-22 | 2020-11-17 | At&T Intellectual Property I, L.P. | Camera array orchestration |
| CN109754654A (en)* | 2018-12-29 | 2019-05-14 | 广州欧科信息技术股份有限公司 | History project based on virtual reality instructs system, method and device |
| KR102243532B1 (en)* | 2019-02-08 | 2021-04-22 | 주식회사 센스톤 | Method, program and apparatus for identifying devices using virtual code based on unique value |
| US12096208B2 (en) | 2019-02-08 | 2024-09-17 | SSenStone Inc. | Virtual code-based control system, method and program, control device and control signal generating means for unmanned moving object |
| KR102167926B1 (en)* | 2019-02-11 | 2020-10-20 | 김규환 | System for employing drone using weather intelligence |
| KR102059180B1 (en)* | 2019-03-25 | 2019-12-24 | 한국드론교육협동조합 | Drone ground control system |
| KR102248051B1 (en)* | 2019-05-20 | 2021-05-04 | 제노테크 주식회사 | Self-Powered SDN Fusion Mobile Ad-hoc Based Mobile Intelligent Video Surveillance System |
| KR102151220B1 (en)* | 2019-09-03 | 2020-09-03 | 주식회사 지에스지 | Intermediary system for professionals and consumers of drone utilization business |
| KR102234398B1 (en)* | 2019-11-22 | 2021-04-01 | 방지철 | Multimedia duplex communication system with drone and operating method thereof |
| CN115003290A (en)* | 2019-11-29 | 2022-09-02 | 博塔尼克斯药物有限公司 | Using Cannabinoids to Treat Neisseria |
| KR102264185B1 (en)* | 2019-12-10 | 2021-06-10 | 재단법인 경북아이티융합 산업기술원 | SYSTEM and METHOD FOR controling multiple drone camera and video proccessing |
| KR102320171B1 (en)* | 2019-12-30 | 2021-11-02 | (주)위메이크드론 | Drone Controller Binding System for Virtual Drone Training Simulator and Method Thereof |
| CN111026617A (en)* | 2019-12-30 | 2020-04-17 | 哈工大机器人(岳阳)军民融合研究院 | Unmanned aerial vehicle data processing method and system, electronic equipment and computer storage medium |
| CN113630745B (en)* | 2020-05-08 | 2024-06-21 | 重庆丰鸟无人机研究院有限公司 | Unmanned aerial vehicle communication method, system, device, equipment and storage medium |
| KR102193608B1 (en)* | 2020-08-19 | 2020-12-22 | 주식회사 라젠 | A drone security management system and method based on drone certification with convergence block chain |
| CN112286226B (en)* | 2020-10-29 | 2023-03-03 | 西北工业大学 | A drone management system |
| KR102345508B1 (en)* | 2021-02-18 | 2022-01-03 | (주)에어로텍 | Online maintenance and monitoring system for drone |
| CN113630810A (en)* | 2021-07-18 | 2021-11-09 | 西北工业大学 | High dynamic network MAC layer communication method |
| KR102452436B1 (en)* | 2021-07-28 | 2022-10-11 | (주)에어로텍 | Online management system for drone |
| KR102653118B1 (en)* | 2022-08-23 | 2024-04-01 | 주식회사 비주얼라이트 | Unmanned aerial vehicle training system |
| CN115657706B (en)* | 2022-09-22 | 2023-06-27 | 中铁八局集团第一工程有限公司 | Landform measurement method and system based on unmanned aerial vehicle |
| KR102606662B1 (en)* | 2022-11-15 | 2023-11-29 | 주식회사 유시스 | System for authenticating the real name of the drone and method thereof |
| CN116880434B (en)* | 2023-06-20 | 2024-01-23 | 辽宁工业大学 | Unmanned aerial vehicle-unmanned aerial vehicle cluster cooperative control method based on cloud and fog calculation under network attack |
| KR102726164B1 (en)* | 2023-12-27 | 2024-11-05 | (주)에이알테크놀로지 | A virtual reality multicopter drone flight simulation method applying dynamics and fluid dynamics and the virtual reality multicopter drone flight simulation system |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160260332A1 (en)* | 2014-05-12 | 2016-09-08 | Unmanned Innovation, Inc. | Unmanned aerial vehicle authorization and geofence envelope determination |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9853715B2 (en)* | 2014-02-17 | 2017-12-26 | Ubiqomm Llc | Broadband access system via drone/UAV platforms |
| KR20150117879A (en)* | 2014-04-11 | 2015-10-21 | 부산대학교 산학협력단 | Unmanned Aerial Vehicle Control System based on Mobile Communication |
| KR101634585B1 (en) | 2014-05-12 | 2016-06-29 | 고려대학교 산학협력단 | Method for disseminating data based geographic location of drone in drone network |
| US10366616B2 (en)* | 2015-01-09 | 2019-07-30 | Botlink, Llc | System and method of collision avoidance in unmanned aerial vehicles |
| US10633091B2 (en)* | 2015-01-29 | 2020-04-28 | Scope Technologies Holdings Limited | Accident monitoring using remotely operated or autonomous aerial vehicles |
| KR101695254B1 (en)* | 2015-02-10 | 2017-01-12 | 한화테크윈 주식회사 | Monitoring and tracking system |
| US9438311B1 (en)* | 2015-08-25 | 2016-09-06 | Logitech Europe S.A. | Power efficient mesh network |
- 2016
- 2016-10-06KRKR1020160129075Apatent/KR101941643B1/enactiveActive
- 2016-10-28WOPCT/KR2016/012260patent/WO2018066744A1/ennot_activeCeased
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20160260332A1 (en)* | 2014-05-12 | 2016-09-08 | Unmanned Innovation, Inc. | Unmanned aerial vehicle authorization and geofence envelope determination |
Non-Patent Citations (1)
| Title |
|---|
| ‘아토리서치, 드론-SDN으로 공중재난망 개발’, ZDNet Korea news, (2014.06.26.)* |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20180038231A (en) | 2018-04-16 |
| WO2018066744A1 (en) | 2018-04-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101941643B1 (en) | System and method for control of multi drone | |
| US12061473B2 (en) | Flight management system for UAVS | |
| Chaurasia et al. | Unmanned aerial vehicle (UAV): A comprehensive survey | |
| CN110651314B (en) | Enhanced Flight Planning for Unmanned Aircraft Systems | |
| EP3311232B1 (en) | Systems and methods for remote distributed control of unmanned aircraft | |
| KR101837979B1 (en) | Method for controlling drone, apparatus and system for executing the method, and server for controlling drone | |
| US9783293B2 (en) | Unmanned aerial vehicle platform | |
| EP3365228B1 (en) | Emergency control of an aircraft | |
| US10158606B2 (en) | Firewall filter rules generation | |
| JP6126805B2 (en) | A flight interpreter for demonstration of captive carry unmanned aerial vehicle systems | |
| CN107357314A (en) | A kind of unmanned vehicle long-range control method and system | |
| CN113778132B (en) | Integrated parallel control platform for sea-air collaborative heterogeneous unmanned system | |
| KR20150117879A (en) | Unmanned Aerial Vehicle Control System based on Mobile Communication | |
| KR102118347B1 (en) | System for implementing autonomic fly and Monitoring Danger Area through Thermal Image Data Shooted by Drone | |
| US9961658B2 (en) | Local network for the simultaneous exchange of data between a drone and a plurality of user terminals | |
| US20240248477A1 (en) | Multi-drone beyond visual line of sight (bvlos) operation | |
| JP2023162867A (en) | Route generation device, route generation method, computer program, and moving object management system | |
| KR20240029396A (en) | Method for managing traffic flow for urban air mobility and apparatus and system therefor | |
| KR102118345B1 (en) | System for Providing Realtiime Trenches Security Guard Service by using Drone in Field | |
| EP4287164A1 (en) | Aircraft, control system, aircraft identification method, and computer-readable medium | |
| CN111813141A (en) | Mission control system and method for remotely operating unmanned aircraft | |
| KR20190113067A (en) | Control system for unmanned aerial vehicle and control method therefor | |
| US20210011472A1 (en) | System, device and method for time limited communication for remotely controlled vehicles | |
| WO2022162848A1 (en) | Control system, flying body identification method, computer-readable medium, and flying body | |
| Kunze et al. | Concept for a Geo-Awareness-System for Civilian Unmanned Aerial Systems |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application | Patent event code:PA01091R01D Comment text:Patent Application Patent event date:20161006 | |
| PA0201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection | Comment text:Notification of reason for refusal Patent event date:20180212 Patent event code:PE09021S01D | |
| PG1501 | Laying open of application | ||
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration | Patent event code:PE07011S01D Comment text:Decision to Grant Registration Patent event date:20181220 | |
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment | Comment text:Registration of Establishment Patent event date:20190117 Patent event code:PR07011E01D | |
| PR1002 | Payment of registration fee | Payment date:20190118 End annual number:3 Start annual number:1 | |
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee | Payment date:20220105 Start annual number:4 End annual number:4 | |
| PR1001 | Payment of annual fee | Payment date:20230106 Start annual number:5 End annual number:5 | |
| PR1001 | Payment of annual fee | Payment date:20240105 Start annual number:6 End annual number:6 | |
| PR1001 | Payment of annual fee | Payment date:20250107 Start annual number:7 End annual number:7 |