KR101941271B1 - Method for providing multi users with remote guard service by robot in remote guard system and remote guard system therefor - Google Patents
Method for providing multi users with remote guard service by robot in remote guard system and remote guard system thereforDownload PDFInfo
- Publication number
- KR101941271B1 KR101941271B1KR1020120150894AKR20120150894AKR101941271B1KR 101941271 B1KR101941271 B1KR 101941271B1KR 1020120150894 AKR1020120150894 AKR 1020120150894AKR 20120150894 AKR20120150894 AKR 20120150894AKR 101941271 B1KR101941271 B1KR 101941271B1
- Authority
- KR
- South Korea
- Prior art keywords
- robot
- communication terminal
- control
- image
- information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L67/00—Network arrangements or protocols for supporting network services or applications
- H04L67/01—Protocols
- H04L67/12—Protocols specially adapted for proprietary or special-purpose networking environments, e.g. medical networks, sensor networks, networks in vehicles or remote metering networks
- H04L67/125—Protocols specially adapted for proprietary or special-purpose networking environments, e.g. medical networks, sensor networks, networks in vehicles or remote metering networks involving control of end-device applications over a network
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L63/00—Network architectures or network communication protocols for network security
- H04L63/08—Network architectures or network communication protocols for network security for authentication of entities
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L65/00—Network arrangements, protocols or services for supporting real-time applications in data packet communication
- H04L65/40—Support for services or applications
- H04L65/403—Arrangements for multi-party communication, e.g. for conferences
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L65/00—Network arrangements, protocols or services for supporting real-time applications in data packet communication
- H04L65/60—Network streaming of media packets
- H04L65/75—Media network packet handling
- H04L65/762—Media network packet handling at the source
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Multimedia (AREA)
- Computing Systems (AREA)
- Computer Hardware Design (AREA)
- Computer Security & Cryptography (AREA)
- General Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Telephonic Communication Services (AREA)
Abstract
Translated fromKorean
Description
Translated fromKorean본 발명은 원격 감시 기술에 관한 것으로서, 더욱 상세하게는 로봇을 이용하여 다수의 사용자에게 원격 감시 서비스를 제공하는 다자간 원격 감시 서비스 제공 방법 및 이를 위한 원격 감시 시스템에 관한 것이다.BACKGROUND OF THE INVENTION 1. Field of the Invention The present invention relates to a remote monitoring technology, and more particularly, to a method for providing a remote monitoring service to a plurality of users using a robot and a remote monitoring system for the same.
오늘날 치안, 화재 등에 대비하기 위하여, 댁내에 카메라를 설치하고 이 카메라에서 촬영한 영상을 원격에서 모니터링할 수 있는 서비스가 개시되었다. 즉, 사용자는 자신이 소유하고 있는 단말기를 통해 상기 카메라에서 촬영한 영상을 원격에서 확인하고, 이 촬영한 영상을 통해 댁내에 이상 상황이 발생하였는지 여부를 실시간으로 모니터링한다.Today, in order to prepare for security and fire, a camera is installed in a house and a service for remote monitoring of images photographed by the camera has been disclosed. That is, the user remotely confirms an image taken by the camera through a terminal owned by the user, and monitors in real time whether or not an abnormal situation occurs in the home through the captured image.
한편, 이동 가능한 로봇을 이용하여 특정 장소에 비상상황을 모니터링하는 기술이 개발되었다. 아래의 특허문헌은 원격 조정이 가능한 로봇을 이용한 보안 감시 시스템 및 방법에 대해서 개시한다.On the other hand, a technology for monitoring an emergency situation at a specific place using a movable robot has been developed. The following patent document discloses a security monitoring system and method using a robot that can be remotely controlled.
그런데 상기 특허는 로봇을 통해 촬영한 영상을 지정된 사용자에게만 제공할 뿐, 그 이외의 사용자에게는 로봇의 촬영 영상을 전송하지 않는다. 또한, 상기 특허 및 종래의 기술에서는 지정된 사용자에게만 로봇의 이동시킬 수 있는 권한을 주고 그 이외에 사용자에게 로봇에 대한 접근을 허락하지 않는다.However, the above-mentioned patent only provides the image taken through the robot to only the designated user, and does not transmit the photographed image of the robot to the other users. In addition, in the above-described patent and related art, only the designated user is allowed to move the robot, and further, the user is not allowed to access the robot.
이렇게 특정 사용자에게만 로봇 제어 및 영상 열람 권한을 허락하는 종래의 방식은, 지정된 사용자의 권익을 보호하는데 유익할 수 있어도, 긴급한 상황에서의 대처 능력을 저하시키는 문제점이 있다. 예컨대, 로봇에 대한 제어 권한과 영상 열람을 가지는 사용자가 로봇에서 촬영한 영상을 지속적으로 확인할 수 없는 상황이 발생한 경우에, 상기 사용자는 침입, 화재 등의 긴급한 상황에 제대로 대처할 수 없어 재산적 및 정신적으로 피해를 입을 수 있다.Although the conventional method of allowing the robot control and the image viewing right only to a specific user may be beneficial for protecting the interests of a designated user, there is a problem that the coping ability in an urgent situation is lowered. For example, when a user having control authority to a robot and a user having an image browsing can not constantly check images photographed by the robot, the user can not properly cope with urgent situations such as intrusion and fire, You can be harmed.
본 발명은 이러한 종래의 문제점을 해결하기 위해서 제안된 것으로, 로봇에서 촬영된 영상과 로봇 제어 권한을 다자간에 공유할 수 있는 다자간 원격 감시 서비스 제공 방법 및 이를 위한 원격 감시 시스템을 제공하는데 그 목적이 있다.SUMMARY OF THE INVENTION It is an object of the present invention to provide a method for providing a multi-party remote monitoring service capable of sharing a robot control right with an image photographed by a robot and a remote monitoring system therefor .
본 발명의 다른 목적 및 장점들은 하기의 설명에 의해서 이해될 수 있으며, 본 발명의 실시예에 의해 보다 분명하게 알게 될 것이다. 또한, 본 발명의 목적 및 장점들은 특허 청구 범위에 나타낸 수단 및 그 조합에 의해 실현될 수 있음을 쉽게 알 수 있을 것이다.Other objects and advantages of the present invention will become apparent from the following description, and it will be understood by those skilled in the art that the present invention is not limited thereto. It will also be readily apparent that the objects and advantages of the invention may be realized and attained by means of the instrumentalities and combinations particularly pointed out in the appended claims.
상기 목적을 달성하기 위한 본 발명의 제 1 측면에 따른 원격 감시 시스템에서 로봇을 이용하여 다자간 원격 감시 서비스를 제공하는 방법은, 로봇에서 촬영된 영상을 획득하여, 상기 로봇의 제어 권한을 가지는 제1통신 단말로 상기 획득한 로봇 촬영 영상을 전송하는 제1전송 단계; 상기 제1통신 단말로부터 제2통신 단말과의 로봇 공유를 요청받는 공유 요청 단계; 로봇 제어 인터페이스와 상기 획득한 로봇 촬영 영상을 상기 제2통신 단말로 전송하는 제2전송 단계: 및 상기 로봇 제어 인터페이스를 통해 상기 제2통신 단말로부터 로봇 제어 정보를 수신하여, 이 로봇 제어 정보를 상기 로봇으로 전송하는 제어 정보 전송 단계를 포함하는 것을 특징으로 한다.According to a first aspect of the present invention, there is provided a method for providing a remote monitoring service using a robot in a remote monitoring system, comprising: acquiring an image photographed by the robot; A first transmission step of transmitting the obtained robot photographed image to a communication terminal; A sharing request step of requesting sharing of a robot with the second communication terminal from the first communication terminal; A second transmission step of transmitting the robot control interface and the acquired robot image to the second communication terminal, and a second transmission step of receiving the robot control information from the second communication terminal through the robot control interface, And transmitting the control information to the robot.
상기 목적을 달성하기 위한 본 발명의 제 2 측면에 따른 원격 감시 시스템은, 로봇에 대한 제어 권한을 가진 제1통신 단말로부터 제2통신 단말과의 로봇 공유를 요청받는 애플리케이션 서버; 상기 로봇에서 촬영한 영상 데이터를 획득하는 미디어 서버; 및 로봇 제어 인터페이스와 상기 미디어 서버에서 획득한 상기 로봇의 영상 데이터를 결합하여 상기 제2통신 단말로 전송하는 게이트웨이;를 포함하고, 상기 애플리케이션 서버는, 상기 로봇 제어 인터페이스를 통해 상기 제2통신 단말로부터 로봇 제어 정보를 수신하여, 이 로봇 제어 정보를 상기 로봇으로 전송하는 것을 특징으로 한다.According to a second aspect of the present invention, there is provided a remote monitoring system comprising: an application server receiving a request for sharing a robot with a second communication terminal from a first communication terminal having control authority to the robot; A media server for acquiring image data photographed by the robot; And a gateway for combining the robot control interface and the image data of the robot acquired by the media server and transmitting the combined image data to the second communication terminal, wherein the application server further comprises: And receives the robot control information and transmits the robot control information to the robot.
본 발명은 이동 로봇의 영상을 타 사용자와 공유할 수 있고, 더불어 타 사용자가 이동 로봇을 제어하는 것을 허락하게 함으로써, 이동 로봇 주변에 발생한 비상상황을 복수의 사용자를 통해 공유하여, 복수의 사용자로 하여금 비상상황을 더 정확하고 신속하게 대처하게끔 유도하는 장점이 있다.According to the present invention, an image of a mobile robot can be shared with other users, and in addition, by allowing other users to control the mobile robot, emergency situations occurring around the mobile robot can be shared among a plurality of users, Thereby leading to a more accurate and prompt response to emergencies.
또한, 본 발명은 이동 로봇의 소유자가 이동 로봇에서 촬영중인 영상을 확인하지 못하는 경우에 상기 이동 로봇에 대한 접근을 허락한 지인을 통해서 비상상황이 계속적으로 주시 되게 함으로써, 비상 상황에서 발생에 따른 신체적 또는 재산적 피해를 최소화시킬 수 있는 효과도 있다.In addition, according to the present invention, when an owner of a mobile robot can not confirm an image being photographed by a mobile robot, an emergency situation is continuously monitored through an acquaintance that allows access to the mobile robot, Or the property damage can be minimized.
본 명세서에 첨부되는 다음의 도면들은 본 발명의 바람직한 실시예를 예시하는 것이며, 발명을 실시하기 위한 구체적인 내용과 함께 본 발명의 기술사상을 더욱 이해시키는 역할을 하는 것이므로, 본 발명은 그러한 도면에 기재된 사항에만 한정되어 해석되어서는 아니 된다.
도 1은 본 발명의 일 실시예에 따른, 로봇을 이용한 원격 감시 시스템의 구성을 나타내는 도면이다.
도 2는 본 발명의 일 실시예에 따른, 원격 감시 시스템에서 이동 로봇을 이용하여 다자간 원격 감시 서비스를 제공하는 방법을 설명하는 흐름도이다.
도 3은 본 발명의 일 실시예에 따른, 공유중인 이동 로봇의 영상과 로봇 제어 UI가 결합된 통신 단말의 화면을 나타내는 도면이다.
도 4는 본 발명의 일 실시예에 따른, 원격 감시 시스템에서 이동 로봇의 공유를 해제시키는 방법을 설명하는 흐름도이다.BRIEF DESCRIPTION OF THE DRAWINGS The accompanying drawings, which are incorporated in and form a part of the specification, illustrate exemplary embodiments of the invention and, together with the description, serve to explain the principles of the invention. And shall not be construed as limited to such matters.
1 is a block diagram of a remote monitoring system using a robot according to an embodiment of the present invention.
2 is a flowchart illustrating a method of providing a multi-party remote monitoring service using a mobile robot in a remote monitoring system according to an embodiment of the present invention.
FIG. 3 is a diagram illustrating a screen of a communication terminal in which an image of a shared mobile robot and a robot control UI are combined according to an embodiment of the present invention.
4 is a flowchart illustrating a method of releasing the sharing of a mobile robot in a remote monitoring system, according to an embodiment of the present invention.
상술한 목적, 특징 및 장점은 첨부된 도면과 관련한 다음의 상세한 설명을 통하여 보다 분명해 질 것이며, 그에 따라 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자가 본 발명의 기술적 사상을 용이하게 실시할 수 있을 것이다. 또한, 본 발명을 설명함에 있어서 본 발명과 관련된 공지 기술에 대한 구체적인 설명이 본 발명의 요지를 불필요하게 흐릴 수 있다고 판단되는 경우에 그 상세한 설명을 생략하기로 한다. 이하, 첨부된 도면을 참조하여 본 발명에 따른 바람직한 일 실시예를 상세히 설명하기로 한다.
The foregoing and other objects, features and advantages of the present invention will become more apparent from the following detailed description of the present invention when taken in conjunction with the accompanying drawings, in which: There will be. In the following description, well-known functions or constructions are not described in detail since they would obscure the invention in unnecessary detail. Hereinafter, a preferred embodiment of the present invention will be described in detail with reference to the accompanying drawings.
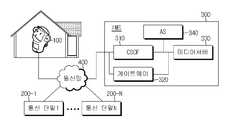
도 1은 본 발명의 일 실시예에 따른, 로봇을 이용한 원격 감시 시스템의 구성을 나타내는 도면이다.1 is a block diagram of a remote monitoring system using a robot according to an embodiment of the present invention.
도 1에 도시된 바와 같이, 본 발명의 일 실시예에 따른 원격 감시 시스템은 이동 로봇(100), 통신 단말(200-N), IMS(IP Multimedia Subsystem)(300)를 포함한다. 상기 이동 로봇(100), 통신 단말(200-N), IMS(300) 각각은 통신망(400)을 통해 서로 통신한다. 상기 통신망(400)은 WiFi 네트워크, CDMA, WCDMA, 모바일 와이맥스, LTE, 인터넷 네트워크 중 어느 하나 또는 이들의 조합일 수 있다.1, a remote monitoring system according to an embodiment of the present invention includes a
이동 로봇(100)은 정보를 표시하기 위한 모니터, 사운드를 출력하기 위한 스피커, 전방 또는 후방 등의 영상을 촬영하기 위한 카메라 및 사용자의 조작에 따라 이동하기 위한 바퀴 및 바퀴 구동부를 포함한다. 또한, 이동 로봇(100)은 통신망(400)과 통신하기 위한 통신 모듈 그리고 이동 로봇을 전체적으로 제어하는 프로세서를 포함한다. 이러한 이동 로봇(100)은 무선 중계기(예컨대, WiFi 중계기)를 통해 통신망(400)으로 접속될 수 있으며, 다이렉트로 통신망(400)으로 접속될 수도 있다. 특히, 이동 로봇(100)은 IMS(300)을 경유하여 원격지에 위치한 사용자의 통신 단말(200-N)로 자신의 촬영 중인 영상을 전송하고, 통신 단말(200-N)로부터 수신한 제어 명령에 따라 이동하거나 카메라의 배율을 확대하거나 축소하거나 카메라의 촬영각도를 변경한다.The
IMS(300)는 통신 단말(200-N)과 이동 로봇(100)로 IP 기반의 멀티미디어 서비스를 제공하는 시스템으로서, CSCF(Call Session Control Function)(310), 애플리케이션 서버(AS: Application Server)(340), 게이트웨이(320) 및 미디어 서버(330)를 포함한다.The IMS 300 is a system for providing an IP-based multimedia service to the
IMS(300)의 CSCF(310)는 통신망(400)과 연동하여, 통신 단말(200-N) 또는 이동 로봇(100)과 IMS 기반의 세션을 설립하고, 더불어 통신 단말(200-N)로 IP 기반의 멀티미디어 서비스(즉, IMS 서비스)를 제공하기 위한 호 처리를 수행한다. 특히, CSCF(310)는 이동 로봇(100)과 세션을 설정하고, 이 설정된 세션을 통하여 이동 로봇(100)에서 촬영한 영상 데이터를 수신할 수 있다. 이러한 CSCF(310)는 P-CSCF(Proxy-CSCF), I-CSCF(Interrogating-CSCF) 및 S-CSCF(Serving-CSCF)를 포함한다.The CSCF 310 of the IMS 300 establishes an IMS-based session with the communication terminal 200-N or the
게이트웨이(320)는 IMS(300)망의 관문 역할을 수행하는 것으로서, 프로토콜 변환 기능, 보안 기능, 인증 기능 등을 수행한다. 특히, 게이트웨이(320)는 타 사용자가 이동 로봇(100)으로 접근할 수 있는 인증 정보를 애플리케이션 서버(340)로부터 수신하여 저장하고, 상기 저장한 인증 정보를 토대로 이동 로봇(100)으로 접근하는 타 사용자의 접근 권한을 인증한다. 또한, 게이트웨이(320)는 URL(Uniform Resource Locator) 생성을 애플리케이션 서버(340)로부터 요청받으면, 이동 로봇(100)의 촬영 영상에 접근할 수 있는 고유의 URL을 생성하여 애플리케이션 서버(340)로 제공한다. 게다가, 게이트웨이(320)는 애플리케이션 서버(340)로부터 수신한 이동 로봇(100)에 대한 제어 권한 정보를 토대로, 로봇 제어 UI(User Interface)를 생성하고, 미디어 서버(330)로부터 수신한 이동 로봇(100)의 영상 데이터와 상기 로봇 제어 UI를 결합하여 지정된 통신 단말(200-N)로 전송한다.The
미디어 서버(330)는 다자 간에 이동 로봇(100)의 영상을 공유시키는 기능을 수행하는 서버로서, 이동 로봇(100)의 영상 데이터를 공유되는 영상 공유방을 생성하고 이 영상 공유방에 통신 단말(200-N)과 이동 로봇(100)을 참여시킨다. 또한, 미디어 서버(330)는 영상 공유방에 참여한 각각의 통신 단말(200-N)로 상기 이동 로봇(100)에서 촬영한 실시간 영상 데이터를 전송한다. 게다가, 미디어 서버(330)는 각각의 통신 단말(200-N)에서 지원 가능한 미디어 파일의 포맷 정보를 통신 단말(200-N)별로 저장하고, 이 저장된 통신 단말(200-N)별 지원 가능한 미디어 파일의 포맷 정보를 토대로, 이동 로봇(100)에서 촬영한 영상 데이터를 통신 단말(200-N)에서 재생 가능한 포맷으로 미디어 변환할 수 있다.The
애플리케이션 서버(340)는 미디어 서버(330)와 게이트웨이(320)와 연동하여, 이동 로봇(100)의 제어 권한과 영상을 다자간에 공유시키는 기능을 수행한다. 구체적으로, 애플리케이션 서버(340)는 이동 로봇(100)의 제어권한을 가지는 특정 통신 단말(200-N)로부터 상기 이동 로봇(100)에 대한 공유 요청 메시지를 수신하면, 미디어 서버(330)로 미디어 자원 할당을 요청한 후, 미디어 서버(330)로부터 영상 공유방 식별정보를 수신한다. 게다가 애플리케이션 서버(340)는 미디어 서버(330)에서 생성한 영상 공유방 식별정보, 게이트웨이(320)에서 생성한 URL 및 공유 참여장치인 통신 단말(200-N)의 식별정보를 매핑하고, 이 매핑된 정보를 상기 이동 로봇(100)의 공유정보로서 저장한다. 한편, 애플리케이션 서버(340)는 게이트웨이(320)로부터 URL을 수신하면, 이동 로봇(100)의 공유에 참여하는 각각의 통신 단말(200-N)로 상기 URL를 전송한다. 또한, 애플리케이션 서버(340)는 이동 로봇(100)의 영상을 공유하고 있는 특정 통신 단말(200-N)로부터 이동 로봇(100)의 행동을 제어하는 제어 데이터가 수신되면, 이 제어 데이터를 이동 로봇(100)로 전송하여, 이동 로봇(100)이 상기 제어 데이터에 근거하여 행동되게 한다.The
이하, 도 2 내지 도 4를 참조한 설명에서는, 이동 로봇(100)의 제어 권한을 가지는 사용자가 제1통신 단말(200-1)의 사용자이고 이 제1통신 단말(200-1)의 요청에 의해 이동 로봇(100)의 영상과 제어 권한을 공유하는 사용자가 제2통신 단말(200-2)의 사용자인 것으로 가정한다.2 to 4, when a user having the control authority of the
도 2는 본 발명의 일 실시예에 따른, 원격 감시 시스템에서 이동 로봇을 이용하여 다자간 원격 감시 서비스를 제공하는 방법을 설명하는 흐름도이다.2 is a flowchart illustrating a method of providing a multi-party remote monitoring service using a mobile robot in a remote monitoring system according to an embodiment of the present invention.
도 2를 참조하면, 이동 로봇(100)은 IMS(300)의 CSCF(310)를 통해 이동 로봇(100)의 제어 권한을 가지는 원소유주의 제1통신 단말(200-1)과 세션을 형성한다(S201). 구체적으로, 이동 로봇(100)의 제어할 수 있는 권한을 가지는 제1통신 단말(200-1)은 CSCF(310)를 통해 이동 로봇(100)과 세션을 형성한 후, 이동 로봇(100)의 카메라를 통해 촬영한 영상 데이터를 이동 로봇(100)으로부터 수신하여 출력한다. 또한, 제1통신 단말(200-1)은 이동 로봇(100)으로 전진, 후진, 카메라 촬영 각도 변경, 카메라 배율 변경 등의 제어 데이터를 전송하여 이동 로봇(100)의 행동을 변경시킬 수 있다.2, the
이렇게, 제1통신 단말(200-1)과 이동 로봇(100) 간에 세션이 설정된 상태에서, 제1통신 단말(200-1)은 이동 로봇(100)의 영상 데이터와 이동 로봇의 행동 제어권을 제2통신 단말(200-2)과 공유하기 위하여, 제2통신 단말(200-2)의 식별정보(예컨대, 전화번호), 이동 로봇(100)의 접속할 수 있는 패스워드 및 이동 로봇(100)의 제어할 수 있는 제어 권한 정보가 포함된 공유 요청 메시지를 CSCF(310)를 경유하여 애플리케이션 서버(340)로 전송한다(S203, S205). 상기 패스워드는 제1통신 단말(200-1)의 사용자가 이동 로봇(100)에 대한 접속 권한을 인증하기 위하여 임시적으로 생성한 암호로서, 제1통신 단말(200-1)의 사용자는 이동 로봇(100)의 공유를 허락한 타 사용자에게 상기 패스워드를 알려준다. 또한, 상기 제어 권한 정보는 이동 로봇(100)에 대한 원격 제어를 허용하는 하나 이상의 개별 행동 정보를 기록한다. 예컨대, 제1통신 단말(200-1)은 사용자의 입력에 따라, 이동 로봇(100)의 전진 행동, 후진 행동, 좌회전 행동, 우회전 행동, 카메라 촬영 각도 변경, 카메라 줌인 또는 줌아웃 중 하나 이상의 개별 행동 정보를 제어 권한 정보에 기록할 수 있다.In this way, when the session is established between the first communication terminal 200-1 and the
다음으로, 애플리케이션 서버(340)는 제1통신 단말(200-1)로부터 공유 요청 메시지를 수신함에 따라, 제2통신 단말(200-2)의 식별정보(즉, 전화번호)가 포함된 미디어 자원 할당 요청 메시지를 미디어 서버(330)로 전송한다(S207). 그러면, 미디어 서버(330)는 이동 로봇(100)의 영상을 다자간에 공유시키기 위한 미디어 자원을 할당한다. 이때, 미디어 서버(330)는 다자간에 영상을 공유하기 위한 영상 공유방을 개설하고 이 영상 공유방에 대한 저장공간, CPU, 메모리, 네트워크 대역폭 등의 미디어 자원을 할당한 후, 상기 영상 공유방에 제2통신 단말(200-2)의 식별정보를 등록한다. 이어서, 미디어 서버(330)는 상기 개설한 영상 공유방의 식별정보가 포함된 미디어 자원 할당 완료 메시지를 애플리케이션 서버(340)로 전송한다(S209).Next, the
그러면, 애플리케이션 서버(340)는 S205 단계에서 수신한 상기 공유 요청 메시지에서 패스워드와 제어 권한 정보를 확인하고, 이 패스워드와 제어 권한 정보가 포함된 URL 요청 메시지를 게이트웨이(320)로 전송한다(S211). 다음으로, 게이트웨이(320)는 이동 로봇(100)의 촬영 영상에 접근할 수 있는 URL을 생성하고, 상기 제어 권한 정보에 기록된 개별 행동 정보를 토대로, 이동 로봇을 제어할 수 있는 로봇 제어 UI(User Interface)를 생성한다(S213). 이때, 게이트웨이(320)는 상기 제어 권한 정보에 기록된 각각의 개별 행동 정보에 대응하는 메뉴를 생성하고, 이렇게 생성한 다수의 메뉴가 포함된 로봇 제어 UI를 생성한다. 예컨대, 게이트웨이(320)는 제어 권한 정보에 개별 행동 정보로서 전진 이동만 기록된 경우, 전진 메뉴만이 포함된 로봇 제어 UI를 생성한다. 또 다른 예로서, 게이트웨이(320)는 제어 권한 정보에 개별 행동 정보로서 전진 이동, 후진 이동, 좌회전 이동 및 우회전 이동이 기록된 경우, 전진 메뉴, 후진 메뉴, 좌회전 메뉴 그리고 우회전 메뉴가 포함된 로봇 제어 UI를 생성한다.Then, the
도 3은 본 발명의 일 실시예에 따른, 공유중인 이동 로봇의 영상과 로봇 제어 UI가 결합된 통신 단말의 화면을 나타내는 도면으로서, 도 3의 화면은 전진 메뉴, 후진 메뉴, 좌회전 메뉴 및 우회전 메뉴가 포함된 로봇 제어 UI(31)를 출력한다.FIG. 3 is a view showing a screen of a communication terminal having a robot control UI combined with an image of a shared mobile robot according to an embodiment of the present invention. The screen of FIG. 3 includes a forward menu, a backward menu, And outputs the
게이트웨이(320)는 로봇 제어 UI와 URL을 생성하고 나서, 상기 생성한 URL을 애플리케이션 서버(340)로 전송한다(S215). 그러면, 애플리케이션 서버(340)는 미디어 서버(330)에서 생성한 영상 공유방 식별정보, 상기 URL 및 제2통신 단말(200-2)의 식별정보(예컨대, 전화번호)를 매핑하여 이 매핑된 정보를 이동 로봇(100)의 공유정보로서 저장한다(S217). 즉, 애플리케이션 서버(340)는 미디어 서버(330)에서 생성한 영상 공유방 식별정보, 게이트웨이(320)에서 생성한 URL 및 공유 참여장치인 제2통신 단말(200-2)의 식별정보를 매핑하여 저장한다. 그리고 애플리케이션 서버(340)는 게이트웨이(320)를 경유하여, 이동 로봇(100)의 영상이 공유되는 제2통신 단말(200-2)로 상기 URL을 전송하여 제2통신 단말(200-2)이 상기 URL로 접속하도록 유도한다(S219).The
다음으로, 제2통신 단말(200-2)은 상기 URL이 목적지로 설정되고 사용자로부터 입력받은 인증 정보(즉, 패스워드)가 포함된 접속 요청 메시지를 통신망(400)으로 전송한다(S221). 그러면, 게이트웨이(320)는 상기 접속 요청 메시지를 수신하고, 이 접속 요청 메시지에 저장된 인증 정보와 S211 단계에서 애플리케이션 서버(340)로부터 수신한 인증 정보가 일치하는지 여부를 확인함으로써, 제2통신 단말(200-2)의 로봇 접속권한을 인증한다(S223).Next, the second communication terminal 200-2 transmits an access request message including the authentication information (i.e., password) set as the destination and input from the user to the communication network 400 (S221). The
이어서, 게이트웨이(320)는 인증 정보가 일치하지 않으면, 제2통신 단말(200-2)로 이동 로봇(100)의 영상 공유가 불가함을 알리는 메시지를 전송한다. 반면에, 게이트웨이(320)는 제2통신 단말(200-2)의 접속 권한 인증에 성공하면(즉, 인증 정보가 일치하면), 인증 성공 알림 메시지를 애플리케이션 서버(340)로 전송한다(S225). 이때, 게이트웨이(320)는 제2통신 단말(200-2)이 접속한 URL을 상기 성공 알림 메시지에 포함시킨다.If the authentication information does not match, the
그러면, 애플리케이션 서버(340)는 인증 성공 알림 메시지에 포함된 URL을 확인하고, 이 URL과 매핑된 영상 공유방 식별정보를 확인한다. 그리고 애플리케이션 서버(340)는 상기 확인한 영상 공유방 식별정보가 포함된 영상 데이터 전송 요청 메시지를 CSCF(310)를 경유하여 이동 로봇(100)으로 전송한다(S227). 다음으로, 이동 로봇(100)은 상기 영상 데이터 전송 요청 메시지에 포함된 영상 공유방 식별정보를 확인하고, 미디어 서버(330)와 세션을 형성한 후(S229), 상기 확인한 영상 공유방 식별정보에 해당하는 영상 공유방에 참여한다. 이때, 미디어 서버(330)는 상기 이동 로봇(100)이 영상 공유방에 참여함에 따라, 게이트웨이(320)를 경유하여 이 영상 공유방에 등록한 제2통신 단말(200-2)과 세션을 형성한다.Then, the
다음으로, 이동 로봇(100)은 촬영중인 실시간 영상 데이터를 미디어 서버(330)로 계속적으로 전송한다(S231). 그러면, 미디어 서버(330)는 이동 로봇(100)이 참여한 영상 공유방을 확인하고, 이 영상 공유방에 등록된 단말이 제2통신 단말(200-2)임을 확인한다. 그리고 미디어 서버(330)는 상기 제2통신 단말(200-2)의 식별정보를 토대로, 상기 제2통신 단말(200-2)에서 지원가능한 미디어 유형을 자체 저장중인 단말별 미디어 파일 포맷 정보를 토대로 확인하고, 이동 로봇(100)로부터 수신한 영상 데이터가 상기 제2통신 단말(200-2)에서 재생 가능한지 여부를 판단한다. 다음으로, 미디어 서버(330)는 이동 로봇(100)에서 수신한 영상 데이터가 상기 제2통신 단말(200-2)에서 재생 불가능하면, 상기 영상 데이터를 제2통신 단말(200-2)에서 지원 가능한 미디어 포맷으로 실시간 변환하고, 이 변환된 영상 데이터를 게이트웨이(320)로 전송한다(S233, S235). 반면에, 미디어 서버(330)는 이동 로봇(100)에서 수신한 영상 데이터가 상기 제2통신 단말(200-2)에서 재생 가능하면, 영상 데이터를 변환하지 않고 게이트웨이(320)로 실시간 전송한다.Next, the
영상 데이터를 수신한 게이트웨이(320)는 상기 영상 데이터와 S213 단계에서 생성한 로봇 제어 UI를 결합한 후, 이렇게 결합된 로봇 제어 UI와 실시간 영상 데이터를 제2통신 단말(200-2)로 전송한다(S237). 예컨대, 도 3에 도시된 바와 같이, 게이트웨이(320)는 이동 로봇(100)에서 촬영한 실시간 영상 데이터 및 전진 메뉴, 후진 메뉴, 좌회전 메뉴 그리고 우회전 메뉴가 포함된 로봇 제어 UI(31)를 결합하여, 제2통신 단말(200-2)로 전송할 수 있다.The
다음으로, 제2통신 단말(200-2)은 이동 로봇(100)에서 촬영중인 영상 데이터와 상기 이동 로봇(100)의 행동을 제어할 수 있어 로봇 제어 UI를 수신하여 화면에 출력함으로써, 이동 로봇(100)에서 촬영중인 영상을 출력한다. 이어서, 제2통신 단말(200-2)은 상기 로봇 제어 UI에 포함된 특정 메뉴를 사용자로부터 입력받을 수 있다.Next, the second communication terminal 200-2 can control the image data being shot and the behavior of the
그러면, 제2통신 단말(200-2)은 상기 메뉴에 대응하는 제어 데이터를 게이트웨이(320)를 경유하여 애플리케이션 서버(340)로 전송하고, 애플리케이션 서버(340)는 상기 제어 데이터를 CSCF(310)를 경유하여 이동 로봇(100)으로 전송한다(S239).Then, the second communication terminal 200-2 transmits the control data corresponding to the menu to the
그러면, 이동 로봇(100)은 상기 제어 데이터에 해당하는 행동을 실행한다(S241). 예컨대, 이동 로봇(100)은 제어 데이터가 전진 명령을 나타내는 것이면 앞으로 이동하고, 상기 제어 데이터가 카메라 줌인을 나타내는 데이터이면 카메라의 배율을 확대한다.Then, the
한편, 제1통신 단말(200-1)의 요청에 따라, 또 다른 통신 단말(200-N)이 이동 로봇(100)의 영상 데이터를 수신할 수도 있다. 구체적으로, 애플리케이션 서버(340)는 제1통신 단말(200-1)로부터 제3통신 단말(200-3)의 식별정보와 제어 권한 정보를 포함된 또 다른 공유 요청 메시지를 수신할 수 있다. 이 경우, 애플리케이션 서버(340)는 게이트웨이(320)로 제어 권한 정보를 전송하여 제3통신 단말(200-3)을 위한 로봇 제어 UI의 생성을 요청하고, 게이트웨이(320)는 수신한 제어 권한 정보를 토대로 제3통신 단말(200-3)이 이동 로봇(100)의 제어할 수 있는 로봇 제어 UI를 생성한다. 그리고 애플리케이션 서버(340)는 상기 게이트웨이(320)에서 생성한 URL을 제3통신 단말(200-3)로 전송한 후, 이 URL로 접속한 제3통신 단말(200-3)에 대한 인종 성공 알림 메시지를 게이트웨이(320)로부터 수신하면, 제3통신 단말(200-3)의 영상 공유 등록을 미디어 서버(330)로 요청한다. 그러면, 미디어 서버(330)는 제2통신 단말(200-2)이 등록된 영상 공유방에 제3통신 단말(200-3)의 식별정보를 등록한 후, 이동 로봇(100)을 통해 수신한 실시간 영상 데이터를 게이트웨이(320)로 전송한다. 그러면, 게이트웨이(320)는 상기 실시간 영상 데이터에 제3통신 단말(200-3)의 로봇 제어 UI를 결합하여 제3통신 단말(200-3)로 전송한다.On the other hand, another communication terminal 200-N may receive the image data of the
상술한 본 발명에 따른 원격 감시 시스템은 이동 로봇(100)의 영상을 타 사용자와 공유할 수 있고, 더불어 타 사용자가 이동 로봇(100)을 제어하는 것을 허락하게 함으로써, 이동 로봇(100) 주변에 발생한 비상상황을 복수의 사용자를 통해 공유시킬 수 있다. 또한, 본 발명에 따른 원격 감시 시스템은 이동 로봇(100)의 소유자가 이동 로봇(100)에서 촬영중인 영상을 확인하지 못하는 경우에 이동 로봇(100)에 대한 접근을 허락받은 타인에 의해서 비상상황이 계속적으로 주시 되게 할 수 있다.The remote monitoring system according to the present invention can share the image of the
도 4는 본 발명의 일 실시예에 따른, 원격 감시 시스템에서 이동 로봇의 공유를 해제시키는 방법을 설명하는 흐름도이다.4 is a flowchart illustrating a method of releasing the sharing of a mobile robot in a remote monitoring system, according to an embodiment of the present invention.
도 4를 참조하면, 애플리케이션 서버(340)는 CSCF(310)를 통하여 제1통신 단말(200-1)로부터 이동 로봇(100)의 공유 해제 요청 메시지를 수신한다(S401, S403). 즉, 이동 로봇(100)을 제어할 수 있는 고유권한을 가지는 제1통신 단말(200-1)은 사용자의 입력신호에 따라 공유 해제 메시지를 IMS(300)로 전송하고, 애플리케이션 서버(340)는 상기 공유 해제 메시지를 CSCF(310)를 통하여 수신한다.4, the
그러면, 애플리케이션 서버(340)는 세션 및 자원 해제 요청 메시지를 게이트웨이(320)로 전송한다(S405). 이때, 애플리케이션 서버(340)는 이동 로봇(100)의 공유정보에서 공유중인 타 사용자의 통신 단말이 제2통신 단말(200-2)임을 확인한 후, 제2통신 단말(200-2)의 식별정보가 기록된 세션 및 자원 해제 요청 메시지를 게이트웨이(320)로 전송한다.Then, the
다음으로, 게이트웨이(320)는 세션 및 자원 해제 요청 메시지에 기록된 제2통신 단말(200-2)의 식별정보를 확인하고, 이 식별정보를 토대로 제2통신 단말(200-2)의 이동 로봇 UI를 삭제하고, 제2통신 단말(200-2)로 전송한 URL를 삭제한다. 그리고 게이트웨이(320)는 상기 제2통신 단말(200-2)과 형성한 세션을 해제한다(S409).Next, the
또한, 애플리케이션 서버(340)는 이동 로봇(100)의 공유정보에서 영상 공유방 식별정보를 확인하고, 이 영상 공유방 식별정보가 포함된 세션 해제 요청 메시지를 미디어 서버(330)로 전송하다(S411). 그러면, 미디어 서버(330)는 세션 해제 요청 메시지에서 영상 공유방 식별정보를 확인하고, 이 식별정보를 토대로 상기 영상 공유방에 참여한 이동 로봇(100)으로 세션 해제를 의미하는 bye 메시지를 전송하여 이동 로봇(100)과 형성한 세션을 해제한다(S413, S415). 그리고 미디어 서버(330)는 상기 영상 공유방을 폐쇄하고, 이 영상 공유방에 할당한 미디어 자원을 회수한다.In addition, the
본 명세서는 많은 특징을 포함하는 반면, 그러한 특징은 본 발명의 범위 또는 특허청구범위를 제한하는 것으로 해석되어서는 안 된다. 또한, 본 명세서에서 개별적인 실시예에서 설명된 특징들은 단일 실시예에서 결합되어 구현될 수 있다. 반대로, 본 명세서에서 단일 실시예에서 설명된 다양한 특징들은 개별적으로 다양한 실시예에서 구현되거나, 적절히 결합되어 구현될 수 있다.While the specification contains many features, such features should not be construed as limiting the scope of the invention or the scope of the claims. In addition, the features described in the individual embodiments herein may be combined and implemented in a single embodiment. Conversely, various features described in the singular < Desc / Clms Page number 5 > embodiments herein may be implemented in various embodiments individually or in combination as appropriate.
도면에서 동작들이 특정한 순서로 설명되었으나, 그러한 동작들이 도시된 바와 같은 특정한 순서로 수행되는 것으로, 또는 일련의 연속된 순서, 또는 원하는 결과를 얻기 위해 모든 설명된 동작이 수행되는 것으로 이해되어서는 안 된다. 특정 환경에서 멀티태스킹 및 병렬 프로세싱이 유리할 수 있다. 아울러, 상술한 실시예에서 다양한 시스템 구성요소의 구분은 모든 실시예에서 그러한 구분을 요구하지 않는 것으로 이해되어야 한다. 상술한 프로그램 구성요소 및 시스템은 일반적으로 단일 소프트웨어 제품 또는 멀티플 소프트웨어 제품에 패키지로 구현될 수 있다.Although the operations have been described in a particular order in the figures, it should be understood that such operations are performed in a particular order as shown, or that all described operations are performed to obtain a sequence of sequential orders, or a desired result . In certain circumstances, multitasking and parallel processing may be advantageous. It should also be understood that the division of various system components in the above embodiments does not require such distinction in all embodiments. The above-described program components and systems can generally be implemented as a single software product or as a package in multiple software products.
상술한 바와 같은 본 발명의 방법은 프로그램으로 구현되어 컴퓨터로 읽을 수 있는 형태로 기록매체(시디롬, 램, 롬, 플로피 디스크, 하드 디스크, 광자기 디스크 등)에 저장될 수 있다. 이러한 과정은 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자가 용이하게 실시할 수 있으므로 더 이상 상세히 설명하지 않기로 한다.The method of the present invention as described above can be implemented by a program and stored in a computer-readable recording medium (CD-ROM, RAM, ROM, floppy disk, hard disk, magneto optical disk, etc.). Such a process can be easily carried out by those skilled in the art and will not be described in detail.
이상에서 설명한 본 발명은, 본 발명이 속하는 기술분야에서 통상의 지식을 가진 자에게 있어 본 발명의 기술적 사상을 벗어나지 않는 범위 내에서 여러 가지 치환, 변형 및 변경이 가능하므로 전술한 실시예 및 첨부된 도면에 의해 한정되는 것이 아니다.It will be apparent to those skilled in the art that various modifications and variations can be made in the present invention without departing from the spirit or scope of the invention. The present invention is not limited to the drawings.
100 : 이동 로봇 200-N : 통신 단말
300 : IMS 310 : CSCF
320 : 게이트웨이 330 : 미디어 서버
340 : 애플리케이션 서버 400 : 통신망100: mobile robot 200-N: communication terminal
300: IMS 310: CSCF
320: Gateway 330: Media Server
340: Application Server 400:
Claims (9)
Translated fromKorean로봇에서 촬영된 영상을 획득하여, 상기 로봇의 제어 권한을 가지는 제1통신 단말로 상기 획득한 로봇 촬영 영상을 전송하는 제1전송 단계;
상기 제1통신 단말로부터 제2통신 단말과의 로봇 공유를 요청받는 공유 요청 단계;
로봇 제어 인터페이스와 상기 획득한 로봇 촬영 영상을 상기 제2통신 단말로 전송하는 제2전송 단계: 및
상기 로봇 제어 인터페이스를 통해 상기 제2통신 단말로부터 로봇 제어 정보를 수신하여, 이 로봇 제어 정보를 상기 로봇으로 전송하는 제어 정보 전송 단계;를 포함하고,
상기 제2전송 단계는,
상기 로봇에서 촬영한 영상에 접근할 수 있는 URL(Uniform Resource Locator)을 생성하는 단계; 및
상기 URL을 상기 제2통신 단말로 전송하고, 상기 URL로 접속한 상기 제2통신 단말로 상기 로봇을 통해 촬영된 영상을 전송하는 단계;를 포함하는 것을 특징으로 하는 로봇을 이용한 다자간 원격 감시 서비스 제공 방법.A method for providing a multi-party remote monitoring service using a robot in a remote monitoring system,
A first transmission step of acquiring an image photographed by the robot and transmitting the obtained robot photographed image to a first communication terminal having control authority of the robot;
A sharing request step of requesting sharing of a robot with the second communication terminal from the first communication terminal;
A second transmission step of transmitting the robot control interface and the acquired robot image to the second communication terminal; and
And a control information transmission step of receiving robot control information from the second communication terminal through the robot control interface and transmitting the robot control information to the robot,
Wherein the second transmission step comprises:
Generating a URL (Uniform Resource Locator) capable of accessing the image photographed by the robot; And
And transmitting the image captured by the robot to the second communication terminal connected to the URL by transmitting the URL to the second communication terminal and providing the remote monitoring service using the robot Way.
상기 제2전송 단계는,
상기 URL로 접속한 제2통신 단말로부터 인증 정보를 수신하여, 이 인증 정보를 토대로 제2통신 단말의 로봇 접속 권한을 인증하여 이 인증 결과에 따라 상기 제2통신 단말로 상기 로봇을 통해 촬영된 영상을 선택적으로 전송하는 것을 특징으로 하는 로봇을 이용한 다자간 원격 감시 서비스 제공 방법.3. The method of claim 2,
Wherein the second transmission step comprises:
The second communication terminal authenticates the robot access right of the second communication terminal on the basis of the authentication information from the second communication terminal connected by the URL, and transmits the image photographed through the robot to the second communication terminal Wherein the remote monitoring service is provided by a robot.
로봇에서 촬영된 영상을 획득하여, 상기 로봇의 제어 권한을 가지는 제1통신 단말로 상기 획득한 로봇 촬영 영상을 전송하는 제1전송 단계;
상기 제1통신 단말로부터 제2통신 단말과의 로봇 공유를 요청받는 공유 요청 단계;
로봇 제어 인터페이스와 상기 획득한 로봇 촬영 영상을 상기 제2통신 단말로 전송하는 제2전송 단계: 및
상기 로봇 제어 인터페이스를 통해 상기 제2통신 단말로부터 로봇 제어 정보를 수신하여, 이 로봇 제어 정보를 상기 로봇으로 전송하는 제어 정보 전송 단계;를 포함하고,
상기 공유 요청 단계는, 원격 제어 가능한 상기 로봇의 행동들 중에서 제어를 허락하는 하나 이상의 개별 행동 정보가 포함된 제어 권한 정보를 상기 제1통신 단말로부터 수신하고,
상기 제2전송 단계는, 상기 제어 권한 정보에 포함된 개별 행동 정보에 해당하는 하나 이상의 메뉴가 포함된 상기 로봇 제어 인터페이스를 생성하여 상기 제2통신 단말로 전송하는 것을 특징으로 하는 로봇을 이용한 다자간 원격 감시 서비스 제공 방법.A method for providing a multi-party remote monitoring service using a robot in a remote monitoring system,
A first transmission step of acquiring an image photographed by the robot and transmitting the obtained robot photographed image to a first communication terminal having control authority of the robot;
A sharing request step of requesting sharing of a robot with the second communication terminal from the first communication terminal;
A second transmission step of transmitting the robot control interface and the acquired robot image to the second communication terminal; and
And a control information transmission step of receiving robot control information from the second communication terminal through the robot control interface and transmitting the robot control information to the robot,
Wherein the sharing request step receives from the first communication terminal control authority information including one or more individual behavior information that allows control among the actions of the robot that can be remotely controlled,
Wherein the second transmission step generates the robot control interface including at least one menu corresponding to the individual behavior information included in the control right information and transmits the generated robot control interface to the second communication terminal. Method of providing surveillance service.
상기 제2전송 단계는,
상기 제2통신 단말에 지원 가능한 미디어 유형을 확인하고, 이 확인한 미디어 유형에 근거하여 상기 로봇을 통해 촬영된 영상을 변환하여 상기 제2통신 단말로 전송하는 것을 특징으로 하는 로봇을 이용한 다자간 원격 감시 서비스 제공 방법.5. The method according to any one of claims 2 to 4,
Wherein the second transmission step comprises:
Wherein the control unit confirms a media type that can be supported by the second communication terminal, and converts the captured image through the robot based on the confirmed media type, and transmits the converted image to the second communication terminal. Delivery method.
상기 로봇에서 촬영한 영상 데이터를 획득하는 미디어 서버; 및
로봇 제어 인터페이스와 상기 미디어 서버에서 획득한 상기 로봇의 영상 데이터를 결합하여 상기 제2통신 단말로 전송하는 게이트웨이;를 포함하고,
상기 애플리케이션 서버는, 상기 로봇 제어 인터페이스를 통해 상기 제2통신 단말로부터 로봇 제어 정보를 수신하여, 이 로봇 제어 정보를 상기 로봇으로 전송하고,
상기 게이트웨이는, 상기 로봇에서 촬영한 영상에 접근할 수 있는 URL(Uniform Resource Locator)을 생성하여 상기 제2통신 단말로 전송하고, 상기 URL로 접속한 상기 제2통신 단말로부터 인증 정보를 수신하여 이 인증 정보를 토대로 제2통신 단말의 로봇 접속 권한을 인증하는 것을 특징으로 하는 원격 감시 시스템.An application server for receiving a robot sharing request from a first communication terminal having a control right for the robot with the second communication terminal;
A media server for acquiring image data photographed by the robot; And
And a gateway for combining the robot control interface and the image data of the robot acquired by the media server and transmitting the combined image data to the second communication terminal,
Wherein the application server receives robot control information from the second communication terminal via the robot control interface and transmits the robot control information to the robot,
The gateway generates a URL (Uniform Resource Locator) capable of accessing the image photographed by the robot and transmits the generated URL to the second communication terminal, receives the authentication information from the second communication terminal connected to the URL, And authenticates the robot access right of the second communication terminal based on the authentication information.
상기 로봇에서 촬영한 영상 데이터를 획득하는 미디어 서버; 및
로봇 제어 인터페이스와 상기 미디어 서버에서 획득한 상기 로봇의 영상 데이터를 결합하여 상기 제2통신 단말로 전송하는 게이트웨이;를 포함하고,
상기 애플리케이션 서버는, 상기 로봇 제어 인터페이스를 통해 상기 제2통신 단말로부터 로봇 제어 정보를 수신하여, 이 로봇 제어 정보를 상기 로봇으로 전송하고,
상기 게이트웨이는, 원격 제어 가능한 상기 로봇의 행동들 중에서 제어를 허락하는 하나 이상의 개별 행동 정보가 포함된 제어 권한 정보를 상기 애플리케이션 서버로부터 수신하고, 상기 제어 권한 정보에 포함된 개별 행동 정보에 해당하는 하나 이상의 메뉴가 포함된 상기 로봇 제어 인터페이스를 생성하는 것을 특징으로 하는 원격 감시 시스템.An application server for receiving a robot sharing request from a first communication terminal having a control right for the robot with the second communication terminal;
A media server for acquiring image data photographed by the robot; And
And a gateway for combining the robot control interface and the image data of the robot acquired by the media server and transmitting the combined image data to the second communication terminal,
Wherein the application server receives robot control information from the second communication terminal via the robot control interface and transmits the robot control information to the robot,
Wherein the gateway receives from the application server control authority information including at least one piece of individual behavior information that allows control among the actions of the robot that is remotely controllable, And generates the robot control interface including the above menus.
상기 미디어 서버는,
상기 제2통신 단말에 지원 가능한 미디어 유형을 확인하고, 이 확인한 미디어 유형에 근거하여 상기 획득한 영상 데이터를 변환하는 것을 특징으로 하는 원격 감시 시스템.9. The method according to claim 7 or 8,
The media server comprises:
Confirms a media type that can be supported by the second communication terminal, and converts the acquired image data based on the confirmed media type.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120150894AKR101941271B1 (en) | 2012-12-21 | 2012-12-21 | Method for providing multi users with remote guard service by robot in remote guard system and remote guard system therefor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020120150894AKR101941271B1 (en) | 2012-12-21 | 2012-12-21 | Method for providing multi users with remote guard service by robot in remote guard system and remote guard system therefor |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20140081295A KR20140081295A (en) | 2014-07-01 |
| KR101941271B1true KR101941271B1 (en) | 2019-01-22 |
Family
ID=51732643
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020120150894AActiveKR101941271B1 (en) | 2012-12-21 | 2012-12-21 | Method for providing multi users with remote guard service by robot in remote guard system and remote guard system therefor |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101941271B1 (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102339857B1 (en) | 2017-03-29 | 2021-12-16 | 삼성전자주식회사 | Method for Managing and Controling the External IoT Device and the Electronic Device supporting the same |
| US11619935B2 (en)* | 2020-07-17 | 2023-04-04 | Blue Ocean Robotics Aps | Methods of controlling a mobile robot device from one or more remote user devices |
| CN113727065B (en)* | 2021-07-21 | 2024-01-26 | 上海原圈网络科技有限公司 | Video processing method between robots and robot system |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001148846A (en)* | 1999-11-19 | 2001-05-29 | Nec Corp | Remote monitoring control system |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100636270B1 (en)* | 2005-02-04 | 2006-10-19 | 삼성전자주식회사 | Home network system and its control method |
| KR20070061213A (en) | 2005-12-09 | 2007-06-13 | 한국전자통신연구원 | Security monitoring system and method using a robot that can be remotely controlled |
| KR20120029121A (en)* | 2010-09-16 | 2012-03-26 | 한국전자통신연구원 | Apparatus and method for seamless service provision between heterogeneous nodes |
- 2012
- 2012-12-21KRKR1020120150894Apatent/KR101941271B1/enactiveActive
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001148846A (en)* | 1999-11-19 | 2001-05-29 | Nec Corp | Remote monitoring control system |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20140081295A (en) | 2014-07-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8483654B2 (en) | System and method for reporting and tracking incidents with a mobile device | |
| EP2882179B1 (en) | Information processing device, information processing method, and program | |
| US9473741B2 (en) | Teleconference system and teleconference terminal | |
| US9693296B2 (en) | Network connection method and apparatus | |
| RU2625338C1 (en) | Method, device and system for installation of wireless network connection | |
| US10608988B2 (en) | Method and apparatus for bluetooth-based identity recognition | |
| KR101868030B1 (en) | Method, device, program and recordng medium for releasing connection | |
| KR101732559B1 (en) | Network connection method, device, system, program and storage medium | |
| KR101759419B1 (en) | Method and apparatus for detecting smart device, program and recording medium | |
| US20180025453A1 (en) | Mobile Legal Counsel System and Method | |
| WO2018157758A1 (en) | Smart home system | |
| JP2017522620A (en) | Request processing method and apparatus | |
| KR20090122907A (en) | Control access to digital images based on device proximity | |
| KR101941271B1 (en) | Method for providing multi users with remote guard service by robot in remote guard system and remote guard system therefor | |
| CN112866222B (en) | Data processing method and device and data processing device | |
| KR20180068054A (en) | Data sharing method among passengers of vehicle and system thereof | |
| KR101406243B1 (en) | system and method for streaming service | |
| JP6524732B2 (en) | Communication device, communication system, control method of communication device and program | |
| JP6577968B2 (en) | Evidence data storage system and program | |
| CN108924085B (en) | Network scheduling method, device and storage medium | |
| US20080261517A1 (en) | Communication Framework and Method and System for Providing a Real-Time Audio and/or Video Signal | |
| JP6175961B2 (en) | COMMUNICATION SYSTEM, METHOD, COMMUNICATION DEVICE, AND PROGRAM | |
| KR101458365B1 (en) | Video recoder voice alarm system and operating method thereof | |
| KR20160032462A (en) | Social security network method and system using a social network service | |
| KR101451010B1 (en) | Apparatus and method of notifying critical situation of mobile user with realtime motion picture data |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application | Patent event code:PA01091R01D Comment text:Patent Application Patent event date:20121221 | |
| PG1501 | Laying open of application | ||
| A201 | Request for examination | ||
| PA0201 | Request for examination | Patent event code:PA02012R01D Patent event date:20171213 Comment text:Request for Examination of Application Patent event code:PA02011R01I Patent event date:20121221 Comment text:Patent Application | |
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection | Comment text:Notification of reason for refusal Patent event date:20180413 Patent event code:PE09021S01D | |
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration | Patent event code:PE07011S01D Comment text:Decision to Grant Registration Patent event date:20181017 | |
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment | Comment text:Registration of Establishment Patent event date:20190116 Patent event code:PR07011E01D | |
| PR1002 | Payment of registration fee | Payment date:20190116 End annual number:3 Start annual number:1 | |
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee | Payment date:20211222 Start annual number:4 End annual number:4 | |
| PR1001 | Payment of annual fee | Payment date:20221221 Start annual number:5 End annual number:5 | |
| PR1001 | Payment of annual fee | Payment date:20231227 Start annual number:6 End annual number:6 | |
| PR1001 | Payment of annual fee | Payment date:20241226 Start annual number:7 End annual number:7 |