KR101462918B1 - Method For Providing A Crash Alarm For Roof Rack Using LDWS - Google Patents
Method For Providing A Crash Alarm For Roof Rack Using LDWSDownload PDFInfo
- Publication number
- KR101462918B1 KR101462918B1KR20130137919AKR20130137919AKR101462918B1KR 101462918 B1KR101462918 B1KR 101462918B1KR 20130137919 AKR20130137919 AKR 20130137919AKR 20130137919 AKR20130137919 AKR 20130137919AKR 101462918 B1KR101462918 B1KR 101462918B1
- Authority
- KR
- South Korea
- Prior art keywords
- cargo
- height
- lane departure
- departure warning
- warning system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




Classifications
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R9/00—Supplementary fittings on vehicle exterior for carrying loads, e.g. luggage, sports gear or the like
- B60R9/08—Supplementary fittings on vehicle exterior for carrying loads, e.g. luggage, sports gear or the like specially adapted for sports gear
- B60R9/10—Supplementary fittings on vehicle exterior for carrying loads, e.g. luggage, sports gear or the like specially adapted for sports gear for cycles
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/10—Path keeping
- B60W30/12—Lane keeping
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2555/00—Input parameters relating to exterior conditions, not covered by groups B60W2552/00, B60W2554/00
- B60W2555/60—Traffic rules, e.g. speed limits or right of way
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/50—External transmission of data to or from the vehicle of positioning data, e.g. GPS [Global Positioning System] data
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2300/00—Purposes or special features of road vehicle drive control systems
- B60Y2300/08—Predicting or avoiding probable or impending collision
- B60Y2300/095—Predicting travel path or likelihood of collision
- B60Y2300/0954—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2300/00—Purposes or special features of road vehicle drive control systems
- B60Y2300/10—Path keeping
- B60Y2300/12—Lane keeping
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Human Computer Interaction (AREA)
- Traffic Control Systems (AREA)
Abstract
Translated fromKoreanDescription
Translated fromKorean본 발명은 차선이탈경보시스템을 이용한 차량용 화물 거치대의 충돌 경보 제공 방법에 관한 것으로서 보다 상세하게는, 차선이탈경보시스템(LDWS) 또는 내비게이션 시스템(AVN)을 구비하는 차량에서, 차량 루프에 자전거 거치대를 구비하고, 상기 자전거 거치대는 자전거의 거치 여부를 인지 가능하도록 이루어지며, 자전거의 거치 인지시, 자전거의 평균 높이를 차체높이에 더하여 전체높이를 산출하는 기술에 관한 것이다. 이와 더불어, 상기와 같이 산출된 전체높이에 차선이탈경보시스템 또는 내비게이션 시스템으로부터 인식되는 도로상 장애물을 상기 전체높이에 대응하여 충돌 위험을 인지하고, 충돌 예상시 경고메세지를 출력하도록 하는 기술에 관한 것이다.
The present invention relates to a method for providing a collision warning of a cargo hold using a lane departure warning system, and more particularly, to a vehicle collision alerting system for a vehicle with a lane departure warning system (LDWS) or a navigation system The bicycle cradle is configured to recognize whether or not the bicycle is stationary, and when the bicycle is stationary, an overall height is calculated by adding an average height of the bicycle to the height of the vehicle body. In addition, the present invention relates to a technique for recognizing a collision risk corresponding to the entire height of a road obstacle recognized from the lane departure warning system or the navigation system at the overall height calculated as described above, and outputting a warning message in case of collision prediction .
최근 아웃도어 레저 활동의 폭넓은 활성화와 함께, 레저활동에 필요한 각종 장비들, 예를 들어, 자전거, 스키, 스노우보드 등의 장비들을 차량에 적재하기 위하여 차량의 루프탑에 설치되는 루프랙(roof rack) 또는 차량의 후단에 장착하여 사용되는 화물 거치대(이하, '화물 거치대'라 함은 상기와 같은 모든 종류의 공지된 거치대들을 포함하는 것으로 이해되어야 한다)가 널리 보급되어 사용되고 있다.In recent years, in addition to wide-spread activation of outdoor leisure activity, a roof rack installed in a roof top of a vehicle to load equipment such as bicycles, skis, snowboards, ) Or a cargo rack (hereinafter referred to as a " cargo rack ") which is mounted and used at the rear end of a vehicle is widely used and is widely used.
상기 화물 거치대는 일반적인 차량 내부에 적재하기 어려운 부피가 큰 장비들을 차량의 외부, 예를 들어, 차량의 상부 또는 후단에 상기 장비들을 거치하여 차량 이동시 이탈되지 않도록 고정함으로써, 화물을 차량 외부에 적재하여 이동 가능하도록 하는 기능을 제공한다.The cargo rack is mounted on the outside of the vehicle, for example, on the upper or rear end of the vehicle so as to prevent the bulky equipment, which is difficult to load inside the vehicle, from being detached when the vehicle is moved Provides the ability to move.
도 1은 상기와 같이 이루어지는 종래의 차량용 화물 거치대를 이용하여 자전거를 차량에 거치시킨 일 실시예를 나타낸다.1 shows an embodiment in which a bicycle is mounted on a vehicle using a conventional cargo rack for a vehicle.
도시된 바와 같이, 종래의 차량용 거치대는 차량의 루프탑에 설치되고, 상기 거치대의 상부에 자전거(도 1의 경우)를 세운 상태로 적재하는 것이 일반적이다. 상기와 같이 자전거를 차량의 루프에 적재하게 되면, 상기 자전거를 적재할 만큼의 실내 공간을 가지고 있지 않은 승용차와 같은 차량에서도 상기와 같은 레저 장비를 손쉽게 적재하여 이동 가능하다는 점에서 장점을 제공하고는 있으나, 다음과 같은 단점이 상존하였다.As shown in the figure, a conventional car cradle is installed in a roof top of a vehicle, and a bicycle (in the case of Fig. 1) is generally mounted on the top of the cradle. As described above, when the bicycle is loaded on the roof of the vehicle, it is possible to easily carry and load the leisure equipment even in a vehicle such as a passenger car that does not have an indoor space enough to load the bicycle. However, the following disadvantages remained.
먼저, 상기와 같이 자전거를 세운상태로 차량의 루프에 적재하는 경우(다른 방법으로 적재하는 경우도 마찬가지이다)에는 이동하는 차량의 전체적인 높이의 증가로 인하여 적재하고있는 자전거가 도로상에 존재하는 구조물과의 충돌 가능성이 유발되는 단점이 있었다. 즉, 운전 중에 대부분의 운전자는 자 차의 루프(roof) 에 자전거가 거치되어 있다는 것을 망각하고 도로상에 존재하는 교각, 또는 톨게이트의 차량 통과 높이 제한 구조물 등과같은 장애을 인지하지 못하여 상기 장애물과 자전거가 충돌하거나, 장애물을 인지한 운전자가 충돌 방지를 위하여 정차 또는 후진함에 따른 사고 유발 가능성이 증가하는 문제가 있었다. 상기와 같은 문제는 상술한 자전거 뿐만 아니라, 캠핑 장비와 같은 부피가 큰 물건을 루프랙에 장착 시에도 적재 화물 높이의 증가로 인한 동일 문제가 발생할 수 있었다.
First, when the bicycle is mounted on the roof of the vehicle as described above (or when the bicycle is stacked by another method), the load on the bicycle may be reduced due to an increase in the overall height of the moving vehicle. There is a possibility that a collision with the vehicle is caused. That is, most drivers forget that the bicycle is stationary on the roof of the car during operation and do not recognize obstacles such as piers on the roads, or vehicle height limit structures on the tollgate, There is a problem in that a driver who perceives a collision or an obstacle has an increased possibility of an accident caused by stopping or backing to prevent collision. The same problem as described above may occur due to an increase in the height of the load cargo even when a bulky object such as a camping equipment is mounted on the roof rack.
또한, 차체의 높이가 기본적으로 높게 이루어진 RV 또는 해치백 차량 등의 대형 차량의 경우, 상기와 같은 화물 거치대에 화물, 특히 자전거를 적재하는 경우에는 상기 자전거가 차량의 상부에 많은 공간을 차지하게 되므로, 주행중인 차량의 전체 높이가 대단히 높아지는 단점이 있었다. 따라서, 평소에 자전거를 거치하지 않은 상태로 대부분 운전하는 운전자들은 자전거 거치시 최상단의 높이를 볼 수 없으므로, 자동차의 높이 제한이 있는 도로, 예를 들어, 고가 다리가 배치된 도로 또는 터널 주행시, 사고를 방지하기 위하여 주행중 운전자는 적재물의 예상 높이를 가늠해야 하므로, 상기 장애물에 시선을 빼앗기게 될 수 있다. 따라서, 상기와 같은 장애물이 존재하는 도로를 주행할 때, 상기 장애물과, 실제 보이지 않는 적재물의 충돌을 방지하기 위하여 운전자는 장애물을 주시해야 하고, 따라서, 전방 주시가 불가능해져 주행 사고 발생 위험이 증가하는 문제가 있었다.
Further, in the case of a large-sized vehicle such as an RV or a hatchback vehicle in which the height of the vehicle body is basically high, when the cargo, particularly the bicycle, is loaded on the cargo rack as described above, the bicycle occupies a large space in the upper portion of the vehicle. There is a disadvantage in that the overall height of the vehicle under running becomes extremely high. Therefore, most of the drivers who do not normally ride the bicycle can not see the top of the bicycle when the bicycle is mounted. Therefore, when driving on a road with a limited height of the vehicle, for example, The driver is required to measure the expected height of the load, so that the driver may lose sight of the obstacle. Therefore, when the vehicle travels on the road where the obstacle is present, the driver must observe the obstacle to prevent collision between the obstacle and the actual invisible load. Therefore, There was a problem.
상기와 같은 문제를 해결하기 위하여 아래와 같은 공지의 기술이 개발되어 사용되고 있다.In order to solve the above problems, the following known technologies have been developed and used.
특허 출원 번호 제 10-2008-0112360호는 차량의 통과높이 제한 경고장치에 관한 것으로서, 차량의 통과 높이가 제한된 도로구조물을 차량이 통과하기 전에 제한 높이를 초과한 차량에 대하여 미리 경보하여 차량 및 도로 구조물의 손상을 방지하는 차량의 통과높이 제한 경고장치에 관한 것으로, 도로의 일측에 설치되며 수광센서를 가지는 수광부와도로의 맞은편에 설치되어 수광센서로 광을 조사하는 발광부를 포함하여 도로를 통행하는 차량의 높이를 감지하는 높이감지수단과 수광센서로부터 입력되는 신호에 따라 경고부가 작동하도록 이루어진다.Patent Application No. 10-2008-0112360 discloses a passage height limit warning device for a vehicle, in which a road structure having a limited passage height of a vehicle is alarmed in advance for a vehicle exceeding a limit height before a vehicle passes, The present invention relates to a vehicle height limit warning device for preventing passage of a structure, which comprises a light receiving portion provided on one side of a road and having a light receiving sensor and a light emitting portion provided on the opposite side of the road for irradiating light with a light receiving sensor, The height detection means for detecting the height of the vehicle and the warning means are operated according to the signals inputted from the light receiving sensor.
또한, 특허 출원 번호 제 10-2010-0063045호는 차량용 자전거 캐리어의 인출 상태와 절첩 상태는 물론 자전거의 고정 상태 및 차량의 후진 및 방향 전환시 후방 또는 측방의 장애물을 감지하고 경고할 수 있는 자전거 캐리어용 경고 시스템에 관하여 기술하고 있다.Patent Application No. 10-2010-0063045 also discloses a bicycle carrier capable of sensing and warning an obstacle in the rear or side when the bicycle carrier is in a fixed state as well as a drawn state and a folded state of the bicycle carrier for a vehicle, For example.
그러나, 상기와 같은 종래의 기술들은 도로상에 수광센서를 설치해야 하거나, 차량의 높이 감지센서를 추가해야 함에 따라 장애물이 존재하는 위치에 비례하여 비용이 증가하는 단점을 가지고 있었으며, 또한, 차량의 후방 또는 측방의 장애물을 경고하는 장치 만으로는 차량 루프에 설치된 적재물의 충돌 방지 및 운전 편의성의 상승에는 전혀 도움이 되지 않는다는 단점들을 가지고 있었다.
However, the above conventional techniques have disadvantages in that a light receiving sensor must be installed on the road, or a cost is increased in proportion to the position of the obstacle due to the addition of the height sensor of the vehicle. The rear or side obstacle warning device alone has a disadvantage in that it does not contribute to the prevention of the collision of the load placed on the vehicle roof and the driving convenience.
본 발명은 상기와 같은 문제를 해결하기 위해 창안된 것으로서,The present invention has been made to solve the above problems,
차선이탈경보시스템(LDWS) 또는 내비게이션 시스템(AVN)을 구비하는 차량에서, 차량 루프에 자전거 거치대를 구비하고, 상기 자전거 거치대는 자전거의 거치 여부를 인지 가능하도록 이루어지며, 자전거의 거치 인지시, 자전거의 평균 높이를 차체높이에 더하여 전체높이를 산출하고, 이와 더불어, 상기와 같이 산출된 차량의 전체높이에 차선이탈경보시스템 또는 내비게이션 시스템으로부터 인식되는 도로상 장애물을 상기 전체높이에 대응하여 충돌 위험을 인지하고, 충돌 예상시 경고메세지를 출력하도록 하는 차선이탈경보시스템을 이용한 차량용 화물 거치대의 충돌 경보 제공 방법을 제공하는데 그 목적이 있다.
In a vehicle equipped with a lane departure warning system (LDWS) or a navigation system (AVN), a bicycle rest is provided in a vehicle loop, and the bicycle rest is configured to be able to recognize whether the bicycle is stationary. The total height of the vehicle is calculated by adding the average height of the lane departure warning system or the road surface obstacle detected from the navigation system to the total height of the vehicle calculated as described above, And to output a warning message in the event of a collision, and to provide a collision alarm providing method of a cargo hold for a vehicle using a lane departure warning system.
본 발명은 상기와 같은 목적을 달성하기 위하여,According to an aspect of the present invention,
차선이탈경보시스템(LDWS) 및 클러스터를 구비하고, 화물 거치대를 설치한 차량의 차선이탈경보시스템을 이용한 차량용 화물 거치대의 충돌 경보 제공 방법에 있어서, 상기 차선이탈경보시스템은 높이제한 구조물의 교통 표지판이 포함하는 제한 높이 정보를 인식하여 TSR정보를 설정하여 제어부로 전송하는 단계; 상기 제어부는 상기 화물 거치대와 연동하여 화물의 거치 여부를 판단하는 단계; 상기 제어부는 상기 화물 거치대에 거치된 화물의 높이를 추정하는 단계; 상기 제어부는 차량 높이와 화물의 높이를 더하여 전체 높이를 산출하는 단계; 상기 제어부는 상기 TSR정보와 상기 전체 높이를 비교하는 단계; 및 상기 제어부는 상기 전체 높이가 상기 TSR정보의 값보다 크면 경보메세지를 출력하는 단계를 포함하는 것을 특징으로 한다.A lane departure warning system, comprising: a lane departure warning system (LDWS) and a cluster; and a lane departure warning system for a vehicle having a luggage stand, the lane departure warning system comprising: Recognizing the limit height information and setting the TSR information, and transmitting the TSR information to the controller; The control unit interlocking with the cargo rack to determine whether the cargo is stowed; The control unit estimating a height of the cargo placed on the cargo rack; Calculating a total height by adding the height of the vehicle and the height of the cargo; Comparing the TSR information with the total height; And the controller may output an alarm message if the total height is greater than the value of the TSR information.
또한, 상기 차량은 내비게이션 시스템을 더 구비하고, 상기 내비게이션 시스템은 현재 위치 인근의 높이제한 구조물의 데이터를 바탕으로 NAVI정보를 설정하여 제어부로 전송하는 단계; 및 상기 제어부는 상기 전체 높이가 상기 NAVI정보의 값보다 크면 경보메세지를 출력하는 단계를 더 포함하는 것을 특징으로 한다.The vehicle further includes a navigation system, wherein the navigation system sets NAVI information on the basis of data of a height restricting structure near a current position and transmits the NAVI information to a control unit; And outputting an alarm message if the total height is greater than the value of the NAVI information.
또한, 상기 제어부는 상기 TSR 정보와 상기 NAVI정보 중 최소값을 선택하여 제한 높이를 설정하는 단계; 및 상기 제어부는 상기 전체 높이가 상기 제한 높이보다 크면 경보메세지를 출력하는 단계를 더 포함하는 것을 특징으로 한다.In addition, the controller may set a limit height by selecting a minimum value among the TSR information and the NAVI information; And the controller may further include outputting an alarm message if the total height is greater than the limit height.
또한, 상기 제어부는 상기 화물 거치대와 연동하여 화물의 거치 여부를 판단하는 단계는, 상기 화물 거치대는 로터리 방식 스위치를 포함하여 이루어진 하나 이상의 자전거 고정 레버를 포함하고, 상기 로터리 방식 스위치는 상기 자전거 고정 레버의 사용시 회전 입력신호를 출력하여 제어부로 전송하는 단계; 및 상기 제어부는 상기 회전 입력신호를 수신하여 화물의 거치 여부를 판단하는 단계를 더 포함하는 것을 특징으로 한다.The control unit may include at least one bike securing lever including a rotary switch, and the rotary type switch may include at least one of a bike fixing lever, And outputting the rotation input signal to the control unit; And the controller receives the rotation input signal to determine whether the cargo is stowed.
또한, 상기 제어부는 상기 화물 거치대와 연동하여 상기 화물 거치대에 거치된 화물의 거치 여부를 판단하는 단계는, 상기 화물 거치대는 하나 이상의 하중센서를 포함하고, 상기 하중센서는 하중이 가해지면 하중입력신호를 출력하여 상기 제어부로 전송하는 단계; 및 상기 제어부는 상기 하중입력신호를 수신하여 화물의 거치 여부를 판단하는 단계를 더 포함하는 것을 특징으로 한다.Further, in the step of determining whether or not the cargo placed on the cargo rack is interlocked with the cargo rack, the control unit may include at least one load sensor, and when the load is applied, To the control unit; And the control unit may further include a step of receiving the load input signal to determine whether the cargo is stowed.
또한, 상기 제어부는 상기 화물 거치대와 연동하여 화물의 거치 여부를 판단하는 단계는, 상기 화물 거치대는 한쌍의 롤러와 양단이 상기 한쌍의 롤러에 각각 감기는 고정끈과 상기 한쌍의 롤러의 회전을 인지하는 끈 감기용 로터를 포함하고, 상기 끈 감기용 로터는 상기 롤러의 회전시 롤러 회전량 신호를 출력하여 상기 제어부로 전송하는 단계; 및 상기 제어부는 상기 롤러 회전량 신호를 수신하여 화물의 거치 여부 및 화물의 높이를 판단하는 단계를 더 포함하는 것을 특징으로 한다.The control unit may include a pair of rollers, a fixing strap having both ends wound on the pair of rollers, and a control unit for detecting the rotation of the pair of rollers, Wherein the belt winding rotor outputs a signal indicating the amount of rotation of the roller when the roller rotates and transmits the signal to the controller; And the control unit may further include a step of receiving the signal indicating the amount of the rollers to determine whether or not the cargo is stowed and the height of the cargo.
또한, 상기 제어부는 화물이 거치된 것으로 판단하면 일정 주기로 주의 메세지를 출력하는 단계를 더 포함하는 것을 특징으로 한다.Further, the control unit may further include a step of outputting a warning message at predetermined intervals when it is determined that the cargo is stowed.
또한, 상기 내비게이션 시스템은 설정된 목적지 까지의 경로 내의 높이제한 구조물의 데이터 중 상기 전체 높이보다 낮은 높이제한 구조물이 존재하는 경우, 해당 경로를 제외한 경로를 재검색하여 제공하는 단계를 더 포함하는 것을 특징으로 한다.The navigation system may further include a step of rediscovering and providing a path excluding the path if a height restricting structure lower than the overall height exists in the data of the height restricting structure in the path to the set destination .
또한, 상기 내비게이션 시스템은 현재 위치가 톨게이트에 인접하는지 판단하는 단계; 및 현재 위치가 톨게이트에 인접해 있으면, 상기 제어부는 안내메세지를 출력하고 톨게이트 안내메세지를 출력하는 단계를 더 포함하는 것을 특징으로 한다.The navigation system may further include determining whether the current location is adjacent to the toll gate; And when the current position is adjacent to the toll gate, the control section outputs a guidance message and outputs a toll gate guidance message.
또한, 상기 제어부는, 차선이탈경보시스템(LDWS), 클러스터 또는 내비게이션 시스템 중 하나인 것을 특징으로 한다.
The control unit may be one of a lane departure warning system (LDWS), a cluster or a navigation system.
상기와 같은 구성을 갖는 본 발명은,The present invention having the above-
차선이탈경보시스템(LDWS)과 내비게이션 시스템(AVN) 이 구비된 차량의 경우 루프랙의 로드(load)를 감지할 수 있는 하중센서를 구비하도록 함으로써, 큰 비용의 추가 없이 루프랙의 화물 거치 여부를 인지할 수 있도록 하고고, 거치 여부 확인시 높이 제한 구조물에 대한 루프랙 장착 화물에 대한 충돌 위험을 사전에 운전자에 경고하도록 함으로써, 안전성을 향상시키고, 이에 따라 고객 관점의 상품성을 증대시킬 수 있는 효과가 있다.In the case of a vehicle equipped with a lane departure warning system (LDWS) and a navigation system (AVN), a load sensor capable of detecting a load of a roof rack is provided. And the risk of collision with the roof rack mounted cargo to the height restricting structure is warned to the driver in advance, thereby enhancing the safety, thereby increasing the merchantability of the customer viewpoint.
또한, 부피가 크거나, 높이가 높은 화물, 예를 들어 자전거 등의 화물의 거치시, 장애물과의 충돌에 의한 사고를 경고메세지에 의하여 미연에 방지하도록 함으로써, 안전성을 향상시킴과 동시에, 충돌 예상시에만 상기 경고메세지가 출력되도록 함으로써, 운전자의 시야가 분산되는 것을 방지하여 주행 안전성을 향상시킬 수 있는 효과가 있다.
In addition, when a bulky or high-height cargo, for example, a cargo such as a bicycle, is stowed, an accident caused by a collision with an obstacle can be prevented by a warning message, The warning message is output only at the time when the vehicle is running, thereby preventing the driver's view from being dispersed, thereby improving driving safety.
도 1은 본 발명의 바람직한 실시예에 따른 차선이탈경보시스템을 이용한 차량용 화물 거치대의 충돌 경보 제공 방법이 수행되는 시스템을 나타내는 블럭도이다.
도 2는 본 발명의 제1실시예에 따른 자전거 거치대를 도시한다.
도 3은 본 발명의 제2실시예에 따른 자전거 거치대를 도시한다.
도 4는 본 발명의 제3실시예에 따른 자전거 거치대를 도시한다.
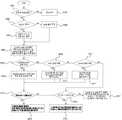
도 5는 본 발명의 차선이탈경보시스템을 이용한 차량용 화물 거치대의 충돌 경보 제공 방법을 나타내는 플로우차트이다.FIG. 1 is a block diagram illustrating a system in which a collision alerting method for a cargo hold for a vehicle using a lane departure warning system according to a preferred embodiment of the present invention is performed.
2 shows a bicycle rack according to a first embodiment of the present invention.
3 shows a bicycle cradle according to a second embodiment of the present invention.
4 shows a bicycle cradle according to a third embodiment of the present invention.
5 is a flowchart showing a collision alerting method of a cargo rest for a vehicle using the lane departure warning system of the present invention.
본 발명은 차선이탈경보시스템(LDWS) 또는 내비게이션 시스템(AVN)을 구비한 차량에서, 차량 루프탑에 화물 거치대를 구비하고, 상기 화물 거치대는 예를 들어, 자전거와 같은 화물의 거치 여부를 인지 가능하도록 이루어지며, 화물의 거치 인지시, 상기 화물의 평균 높이를 차체높이에 더하여 전체높이를 산출하는 기술이다. 이와 더불어, 상기와 같이 산출된 전체높이에 차선이탈경보시스템 또는 내비게이션 시스템으로부터 인식되는 도로상 장애물을 상기 전체높이에 대응하여 충돌 위험을 인지하고, 충돌 예상시 경고메세지를 출력하도록 하는 기술이다.In a vehicle equipped with a lane departure warning system (LDWS) or a navigation system (AVN), a cargo hold is provided in a vehicle roof top, and the cargo hold can recognize whether or not a cargo, such as a bicycle, And when the cargo is stationary, the total height is calculated by adding the average height of the cargo to the height of the car body. In addition, it is a technique for recognizing the risk of collision corresponding to the entire height of the road-like obstacle recognized from the lane departure warning system or the navigation system to the total height calculated as described above, and outputting a warning message when collision is anticipated.
이하 기술되는 '화물 거치대'의 용어는 공지된 어떠한 거치대, 예를 들어, 루프 랙, 자전거 거치대, 스키장비 거치대 또는 공지된 각종 화물 거치대 등의 차량에 설치되어 각종 화물을 거치시킬 수 있는 모든 거치대를 포함하는 것으로 이해되어야 하며, 이하 기술되는 본 발명의 바람직한 실시예에서 상기 화물 거치대가 '자전거 거치대'를 기준으로 설명되었다 하더라도, 본 발명의 기술 범위를 벗어나지 않는 한 상술한 상기 자전거 거치대는 공지의 모든 화물 거치대에 적용될 수 있다는 것은 당업자에게 자명한 것으로 이해되어야 한다.
The term " cargo rack " described below is intended to encompass all known racks, for example, roof racks, bicycle racks, ski equipment racks or any other known cargo racks, In the preferred embodiment of the present invention described below, although the cargo rack is described on the basis of a 'bicycle rack', the bicycle rack described above is not limited to the known It should be understood that it is obvious to a person skilled in the art that it can be applied to a cargo hold.
이하 도면을 참조하여 본 발명의 바람직한 실시예를 상세하게 설명한다.Hereinafter, preferred embodiments of the present invention will be described in detail with reference to the drawings.
도 1은 본 발명의 바람직한 실시예에 따른 차선이탈경보시스템을 이용한 차량용 화물 거치대의 충돌 경보 제공 방법이 수행되는 시스템을 나타내는 블럭도이다.FIG. 1 is a block diagram illustrating a system in which a collision alerting method for a cargo hold for a vehicle using a lane departure warning system according to a preferred embodiment of the present invention is performed.
도시된 바와 같이, 본 발명은 차선이탈경보시스템(10)(LDWS)에 포함된 교통신호인식장치(TSR)를 통하여 교통 표지판으로부터 높이제한표지판을 인식하여 통과 가능한 제한높이를 인식하도록 하고, 클러스터(20) 등의 차량의 제어부를 통하여 차량 상부에 거치된 자전거 등의 화물의 거치여부 및 높이를 인식하여 전체차체높이를 산출함으로써, 충돌 예상시 경고메세지를 출력하도록 이루어진다.As shown in the figure, the present invention recognizes a height restriction sign from a traffic sign through a traffic signal recognition device (TSR) included in the lane departure warning system 10 (LDWS) 20 or the like to recognize the height and the height of the cargo such as a bicycle or the like mounted on the upper part of the vehicle to calculate the height of the entire vehicle body so as to output a warning message in case of collision.
이를 위해서 상기 내비게이션 시스템(30)은 상기 차선이탈경보시스템(10)과 상기 클러스터(20)와 연동하고, 상기 차선이탈경보시스템(10)으로부터 높이신호를 수신하고, 상기 클러스터(20)로부터 화물 감지 신호를 수신한다. 상기 내비게이션 시스템(30)은 상기 차선이탈경보시스템(10) 또는 상기 클러스터(20)와 차량내 캔(CAN) 통신을 통하여 통신을 할 수 있고, 그 외의 어떠한 공지의 통신수단을 통하여 통신 가능하다.To this end, the
상기 내비게이션 시스템(30), 클러스터(20) 및 차선이탈경보시스템(10)은 각각 서로 공지의 통신망(차량내 통신망을 포함)을 통하여 서로 연동되도록 하거나, 또는 그중 하나 이상을 포함하는 하나의 모듈로서 통합될 수 있으며, 이러한 사항은 공지의 사항이므로 상세한 설명은 생략한다.
The
도 2는 본 발명의 제1실시예에 따른 자전거 거치대를 도시한다.2 shows a bicycle rack according to a first embodiment of the present invention.
제1실시예의 자전거 거치대는 차량의 상부(루프탑)에 설치되어 자전거를 거치할 수 있는 공지의 어떠한 자전거 거치대라도 될 수 있으나, 상기 자전거의 거치를 인지하기 위한 자전거 거치 감지 수단으로 하나 이상의 하중센서 또는 물체감지 스위치를 포함하여 이루어진다. 상기 하중센서는 가해지는 하중을 인지하여 출력신호를 출력하는 공지의 수단이고, 상기 물체감지 스위치는 스프링에 의하여 일정 하중 발생시 스위치 ON되는 구조를 가진 공지의 수단이다. 상기 하중센서 및 물체감지 스위치는 가해지는 하중을 인지하기 위한 공지의 어떠한 수단이라도 대체될 수 있으며, 이하 설명의 편의상 상기 하중센서와 물체감지 스위치는 '하중센서'의 명칭으로 통일하여 기술한다.The bicycle cradle of the first embodiment may be any known bicycle cradle which is installed on the top (roof top) of the vehicle and can mount the bicycle. However, as the bicycle cradle sensing means for recognizing the mounting of the bicycle, Or an object detection switch. The load sensor is a known means for recognizing an applied load and outputting an output signal, and the object detecting switch is a known means having a structure that is switched on when a constant load is generated by a spring. The load sensor and the object detection switch may be replaced with any known means for recognizing the applied load. For convenience of explanation, the load sensor and the object detection switch are collectively referred to as a 'load sensor'.
본 발명의 제1실시예에서의 자전거 거치대는 상기의 하중센서를 구비함으로써, 자전거의 거치시, 상기 자전거에 의하여 가해지는 하중을 인지하여 자전거의 거치여부를 인지 가능하도록 이루어진다. 상기 하중센서는 하중이 가해지면 하중입력신호를 출력하도록 이루어진다. 상기 하중센서에서 출력되는 하중입력신호는 차량에 구비된 클러스터(20)로 전송된다.The bicycle cradle in the first embodiment of the present invention is equipped with the above-mentioned load sensor, so that it is possible to recognize whether the bicycle is stationary or not by recognizing the load applied by the bicycle when the bicycle is stationary. The load sensor is configured to output a load input signal when a load is applied. The load input signal output from the load sensor is transmitted to the
따라서, 본 발명의 제1실시예에서는 상기와 같은 구성을 통하여 자전거의 거치시 하중센서를 통하여 차량의 클러스터(20)에서 인지 가능하도록 이루어진다.
Therefore, in the first embodiment of the present invention, it is possible to recognize the vehicle through the load sensor during the mounting of the bicycle through the
도 3은 본 발명의 제2실시예에 따른 자전거 거치대를 도시한다.3 shows a bicycle cradle according to a second embodiment of the present invention.
제2실시예의 자전거 거치대는 상기 제1실시예와 마찬가지로 차량의 상부에 설치되어 자전거를 거치할 수 있는 공지의 어떠한 자전거 거치대라도 될 수 있으나, 상기 자전거의 거치를 인지하기 위한 자전거 거치 감지 수단으로 로터리 방식 스위치를 포함하여 이루어진 하나 이상의 자전거 고정 레버가 구비된다. 상기 고정레버는 자전거의 거치시 상기 고정레버에 형성된 후크(hook)등을 자전거의 몸체부 등에 고정시켜 상기 자전거를 거치하도록 이루어진 공지의 구성과 동일하게 이루어지나, 상기 로터리 방식 스위치를 통하여 상기 고정레버의 회전 발생시, 이를 하도록 이루어진다.The bicycle cradle of the second embodiment may be any known bicycle cradle installed at the upper portion of the vehicle to mount the bicycle in the same manner as in the first embodiment. However, as the bicycle cradle sensing means for recognizing the mounting of the bicycle, Way switch is provided. The fixing lever is configured in the same manner as the known configuration in which a hook formed on the fixing lever is fixed to the body of the bicycle to mount the bicycle when the bicycle is mounted, When the rotation of the rotor is generated.
따라서, 상기 로터리 방식 스위치는 상기 고정레버의 사용시(즉, 자전거 거치시)회전되어, 회전입력신호를 생성하고, 상기 회전입력신호는 차량의 클러스터(20)로 전송된다.Therefore, the rotary type switch is rotated when the fixed lever is used (i.e., when the bicycle is stationary) to generate a rotation input signal, and the rotation input signal is transmitted to the
따라서, 본 발명의 제2실시예에서는 상기와 같은 구성을 통하여 자전거의 거치시 상기 로터리 방식 스위치를 통하여 차량의 클러스터(20)에서 인지 가능하도록 이루어진다.
Therefore, in the second embodiment of the present invention, it is possible to recognize in the
도 4는 본 발명의 제3실시예에 따른 자전거 거치대를 도시한다.4 shows a bicycle cradle according to a third embodiment of the present invention.
제3실시예의 자전거 거치대는 상기 제1실시예와 마찬가지로 차량의 상부에 설치되어 자전거를 거치할 수 있는 공지의 어떠한 자전거 거치대라도 될 수 있으나, 상기 자전거의 거치를 인지하기 위한 자전거 거치 감지 수단으로 회전 가능하도록 고정된 한쌍의 롤러와 상기 한쌍의 롤러에 그 양단이 각각 감기는 고정끈(공지의 어떠한 밴드, 로프 등의 모든 종류의 끈을 포함한다)과 상기 한쌍의 롤러에 설치되는 끈 감기용 로터가 포함된다.The bicycle cradle of the third embodiment may be any known bicycle cradle which is installed at the top of the vehicle and can mount the bicycle as in the first embodiment, (Including any kind of known band, any type of rope such as a rope) wound on both ends of the pair of rollers and a pair of rollers fixed to the pair of rollers, .
도시된 바와 같이, 상기 롤러는 좌우 대칭으로 이루어진 한쌍으로 배치되고, 상기 한쌍의 롤러 각각에 상기 고정끈의 양단이 각각 연결(일단이 일측 롤러에 연결되고, 타단이 타측 롤러에 연결)되어 감김으로써, 상기 고정끈에 외력이 가해지면 상기 한쌍의 롤러가 동시에 풀리도록 하는 구조로 이루어진다. 또한, 상기 롤러는 외력이 가해지면 회전되고, 외력의 해제시 상기 끈 감기용 로터에 의하여 다시 원래의 위치로 감기도록 함으로써, 자전거의 거치 시나 거치 해제시 고정끈이 외력이 가해진 만큼만 풀리도록 이루어지는 것이 바람직하다.As shown in the figure, the rollers are arranged symmetrically, and both ends of the fixing strap are connected to each of the pair of rollers (one end is connected to one roller and the other end is connected to the other roller) And when the external force is applied to the fixing strap, the pair of rollers are simultaneously released. Further, the roller is rotated when an external force is applied, and is wound back to its original position by the above-mentioned string winding rotor when the external force is released, so that the fixing strap is released only when external force is applied desirable.
또한, 상기 고정끈은 미사용시 상기 롤러에 감긴 상태로 존재하며, 사용시 도시된 바와 같이, 감긴 고정끈이 상기 롤러의 회전에 따라 풀리게 되어 자전거의 상부에 걸쳐지고, 이후 고정되어 상기 자전거의에 하방 압력을 가함으로써, 거치된 자전거의 이동을 제한하여 자전거를 고정하도록 이루어진다. 따라서, 자전거의 거치시, 상기 고정끈의 풀림에 따라 상기 롤러가 회전하고, 이는 상기 끈 감기용 로터에 의하여 인지되도록 이루어진다.In addition, the fixing straps are wound around the rollers when not in use, and as shown in the use, the winding fixing straps are loosened according to the rotation of the rollers so as to cover the top of the bicycle, By applying pressure, the movement of the stationary bicycle is restrained to fix the bicycle. Therefore, when the bicycle is mounted, the roller rotates in response to the release of the fixing strap, which is recognized by the string winding rotor.
상기 제3실시예에서는 상기 끈 감기용 로터의 회전에 의하여 자전거의 거치 인지 뿐만 아니라, 상기 고정끈의 연장(실질적으로는 상기 롤러에 감겼던 부분이 풀리는)에 의한 상기 로터의 회전량 또는 회전수를 통하여 거치된 화물의 높이를 산출 가능하다. 이때, 상기 로터의 회전에 따라 풀린 고정 끈 길이를 사전에 측정함으로써 회전수에 따른 길이 측정을 가능하도록 할 수 있다.In the third embodiment, not only the mounting of the bicycle by the rotation of the string winding rotor but also the rotation amount or rotation number of the rotor by the extension of the fixing string (substantially the portion wound on the roller is released) It is possible to calculate the height of the stored cargo. At this time, it is possible to measure the length according to the number of revolutions by previously measuring the length of the fixing cord loosened according to the rotation of the rotor.
상기 끈 감기용 로터는 상기 한쌍의 롤러 각각에 설치되거나, 또는 상기 한쌍의 롤러중 어느 하나에만 설치될 수 있다. 그리고, 상기 끈 감기용 로터는 상기 고정끈의 풀림시 상기 롤러가 회전되면, 롤러회전량 신호를 출력함으로써, 차량의 클러스터(20)에서 인지 가능하도록 이루어진다.
The string-winding rotor may be provided on each of the pair of rollers, or may be provided on only one of the pair of rollers. When the roller is rotated when the fixing strap is loosened, the belt-winding rotor outputs a signal indicating the amount of roller rotation so that it can be recognized in the
본 발명은 상술한 제1 내지 제3 실시예의 화물 거치대(100)를 통하여 화물의 거치(제1 및 제2실시예의 경우) 또는 화물의 거치 및 화물의 높이(제3실시예의 경우)를 인지 가능하도록 이루어지며, 이 과정은 바람직한 실시예에서, 상기 화물 거치대(100)와 차량에 구비된 클러스터(20)에의 통신을 통하여 이루어진다. 그러나, 본 발명은 이에 한정하는 것은 아니며, 필요시, 상기와 같은 과정은 차량의 내비게이션 시스템(30) 또는 차선이탈경보시스템(10)(LDWS)에서도 수행되도록 이루어질 수 있다.The present invention is capable of recognizing the mount of the cargo (in the first and second embodiments) or the height of the cargo and the height of the cargo (in the case of the third embodiment) through the
또한, 본 발명의 바람직한 실시예에서, 상기 클러스터(20)는 상기와 같이 화물의 거치 여부를 인지하면, 차량내에 구비된 내비게이션 시스템(30)과 연동하여, 상기 내비게이션 시스템(30) 상에서 경고메세지가 출력되도록 이루어진다.
In the preferred embodiment of the present invention, when the
도 5는 상기와 같이 이루어지는 본 발명의 차선이탈경보시스템을 이용한 차량용 화물 거치대의 충돌 경보 제공 방법을 나타내는 플로우차트이다.FIG. 5 is a flowchart illustrating a method of providing a collision alarm of a cargo hold for a vehicle using the lane departure warning system of the present invention.
상기 도5의 플로우차트는 상기 제1실시예 내지 제3실시예에 적용된 구성요소들이 모두 적용된 실시예(본 발명의 바람직한 실시예로서)를 나타내고 있으나 이에 한정하는 것은 아니다.The flow chart of FIG. 5 shows an embodiment (as a preferred embodiment of the present invention) to which all of the components applied to the first to third embodiments are applied, but the present invention is not limited thereto.
먼저, 차량에 구비된 클러스터(20)는 차량의 상부에 설치된 화물 거치대(100)에 구비된 하중센서로부터 하중입력신호가 수신되는지 판단한다(S001). 만일, 상기 단계 S001에서 하중센서로부터 하중입력신호가 수신되지 않는 것으로 판단되면, 상기 화물 거치대(100)에 화물이 거치되지 않은 것으로 판단하고, 이하의 로직(단계들)을 중단한다(S005).First, the
상기 단계 S001 에서 상기 클러스터(20)가 하중센서로부터 하중입력신호를 수신하면, 상기 클러스터(20)는 화물이 적재된 것으로 인지하고, 상기 화물 거치대(100)에 구비된 고정레버로부터 회전입력신호가 있는지 판단한다(S002).When the
상기 단계(S002)에서 상기 클러스터(20)는 상기 고정레버로부터의 회전입력신호가 수신되는 것으로 판단하면, 상기 거치대에 적재된 화물이 자전거인 것으로 판단하고, 사전에 설정하여 저장하고 있는 평균 자전거 높이를 현재 차량의 차체높이에 더하여 차량의 전체 높이를 산출한다(S003). 다시말해서, 상기 클러스터(20)는 화물이 자전거로 파악 되면 일반적인 자전거 높이(평균값)에 현재 차량 높이를 더하고 그 높이에 허용 오차 범위를 추가로 더하여 자전거 거치 시 차량 높이를 결정한다.If it is determined in step S002 that the rotation input signal from the fixed lever is received, the
차량 높이의 산출에는 다음의 식이 적용될 수 있다.The following equation can be applied to the calculation of the vehicle height.
[식 1][Formula 1]
자전거 거치시 차량 높이 H_bc = H_b + H_c + αVehicle height at the time of bicycle mounting H_bc = H_b + H_c + α
H_b : 자전거 최대 높이 (자전거 L 사이즈 높이) (결정값)H_b: Maximum height of the bicycle (size of the bicycle L size) (determined value)
H_c : 지면에서 차량 루프탑까지 차량 높이 (결정값)H_c: Height from the ground to the vehicle roof top (Decision value)
α : 높이 여유 오차 (튜닝 값)
α: Height tolerance (tuning value)
그러나, 만일 상기 단계(S002)에서 상기 고정레버로부터 회전입력신호가 수신되지 않는 것으로 판단된다면, 상기 클러스터(20)는 상기 거치대에 구비된 끈 감기용 로터로부터 수신된 롤러 회전량 신호를 통하여 상기 화물 거치대(100)에 거치된 물체의 높이를 산출한다(S004). 다시말해서, 상술한 바와 같이, 상기 화물 거치대(100)에 거치된 화물이 자전거가 아닌 경우(자전거일 수도 있음), 화물의 거치를 위하여 사용된 상기 고정끈의 풀림에 의하여 회전된 로터에서 출력된 롤러 회전량 신호로부터, 거치된 화물의 최대 높이를 산출하고, 산출된 화물의 최대 높이를 차량 높이에 더하여 전체 차량 높이를 결정할 수 있다.
However, if it is determined in the step S002 that the rotation input signal is not received from the fixed lever, the
한편, 차량 주행시, 차량에 구비된 차선이탈경보시스템(10)(LDWS)에 구비된 교통신호 인식장치(TSR, Traffic Sign Recognition)는 주행중 대면하게 되는 교? 표지판들을 스캔하여 정보를 획득하는데, 이때, 상기 교통신호 인식장치는 도로상에 배치되는 높이 제한 구조물(터널, 신호등, 표지판 등)의 상단에 의무적으로 설치해야 하는 높이 제한 표지판을 인지하고 공지의 이미지 인식 기술을 통해 높이 제한 구조물의 높이 값을 인식하여, 인식된 높이값(이하, 'TSR정보'라 함)을 차량의 내비게이션 시스템(30)으로 전송한다(S006).On the other hand, a traffic sign recognition (TSR) provided in the lane departure warning system (LDWS) 10 provided in the vehicle at the time of driving the vehicle, At this time, the traffic signal recognition device recognizes a height restriction sign, which must be installed at the top of a height restricting structure (a tunnel, a traffic light, a signboard, etc.) disposed on the road, The height value of the height-restricting structure is recognized through the recognition technology, and the recognized height value (hereinafter, referred to as 'TSR information') is transmitted to the
한편, 상기 내비게이션 시스템(30)은 도로상에 배치되는 장애물(높이 제한 구조물 등)에 대한 정보를 사전에 데이터화하여 지도정보 DB에 저장하고, GPS 모듈을 통하여 인식된 현재 좌표 근방의 높이 제한 구조물에 관한 데이터(이하 'NAVI정보' 라 함)가 있는지 파악함과 동시에, 상기 클러스터(20)로부터 수신되는 TSR정보가 있는지 판단한다(S007).The
상기 단계(S007)에서 상기 내비게이션 시스템(30)은 지도정보 DB상에서 검색된 NAVI정보와 상기 클러스터(20)로부터 수신된 TSR정보가 모두 존재하는 것으로 판단되면, 상기 NAVI정보와 TSR정보 중 최소값을 선택하여 제한 높이를 설정한다(S008). 상기 단계에서, NAVI정보와 TSR정보 중 최소값을 제한높이로 선택하는 이유는 거치한 화물의 충돌 방지가 최 우선 순위이기 때문이다.If it is determined in step S007 that both the NAVI information retrieved on the map information DB and the TSR information received from the
반면, 상기 단계(007)에서 상기 내비게이션 시스템(30)은 NAVI정보와 TSR정보가 모두 존재하는 것이 아닌 것으로 판단되면, 현재 획득된 정보 중에서 TSR정보가 존재하는지 판단한다(S009). 상기 단계(S009)에서 상기 내비게이션 시스템(30)은 NAVI정보가 없는 것으로 판단되면, 현재 획득하여 사용 가능한 TSR정보를 선택하여 제한 높이를 설정한다(S010). 이때, 바람직하게는, 상기 내비게이션 시스템(30)은 저장된 지도정보 DB를 상기 TSR정보를 기반으로 업데이트 하도록 하는 것이 바람직하다.On the other hand, if it is determined in step (007) that the NAVI information and the TSR information do not exist, the
반면, 상기 단계(007)에서 상기 내비게이션 시스템(30)은 NAVI정보와 TSR정보가 모두 존재하는 것이 아닌 것으로 판단되면, 현재 획득된 정보 중에서 NAVI정보가 존재하는지 판단한다(S011). 상기 단계(S011)에서 상기 내비게이션 시스템(30)은 TSR정보가 없는 것으로 판단되면, 현재 획득하여 사용 가능한 상기 NAVI정보를 선택하여 제한 높이를 설정한다(S012).
On the other hand, if it is determined in step (007) that the NAVI information and the TSR information do not exist, the
상기 내비게이션 시스템(30)은 상기와 같이 상기 단계(S008), (S010) 또는 (S012)중 어느 하나의 단계를 통하여 선택된 제한 높이와 상기 단계(S003)에서 결정된 차량의 전체 높이를 비교한다(S013).The
그 결과로, 상기 내비게이션 시스템(30)은 제한 높이와 상기 단계(S003)에서 결정된 차량의 전체 높이 중 차량의 전체 높이가 상기 제한 높이 보다 더 높은 것으로 판단되면, 경보메세지를 출력한다(S014). 즉, 상기 제한 높이가 화물을 포함한 차량 전체의 높이보다 작을 때에는 상기 내비게이션 시스템(30)은 경고메세지를 출력하되, 경고메세지는 상기 내비게이션 시스템(30)의 디스플레이 수단 또는 클러스터(20) 통합 표시창을 통해 출력되도록 할 수 있다. 따라서, 경고 메세지 표시(경고음을 포함할 수 있음)을 발생하여 운전자에게 주의를 주도록 이루어진다.As a result, the
이와 동시에, 바람직하게는, 상기 내비게이션 시스템(30)은 상기 높이제한 구조물 통과 회피 경로로 재 탐색을 하도록 제어될 수 있다. (더 바람직하게는, 상기 내비게이션 시스템(30)이 화물을 인지하여 목표 지까지 경로 탐색 시 사전에 차량 통과 제한 구조물을 회피 하는 경로로 안내 할 수도 있다). 다시말해서, 상기 내비게이션 시스템(30)은 설정된 목적지 까지의 경로 내의 높이제한 구조물의 데이터 중 상기 전체 높이보다 낮은 높이제한 구조물이 존재하는 경우, 해당 경로를 제외한 경로를 재검색하여 제공하도록 이루어진다.
At the same time, preferably, the
한편, 상기 내비게이션 시스템(30)은 상기 단계(S002)에서 화물의 거치여부를 인지 후 현재 차량의 위치가 지도정보 DB에 저장된 위치 정보들 중 톨게이트에 인접하여 주행중인지 판단한다(S015).In operation S015, the
만약, 상기 단계(S015)에서, 현재 위치가 톨게이트에 인접해 있는 것으로 판단되면, 상기 내비게이션 시스템(30)은 화물이 있음을 안내하는 안내메세지를 출력하고 화물차가 통과 가능한 톨게이트로 안내 한다(S016).If it is determined in step S015 that the current location is adjacent to the toll gate, the
그리고, 상기 단계(S015)에서, 현재 위치가 톨게이트에 인접해 있지 않은 것으로 판단되면, 상기 내비게이션 시스템(30)은 사전 설정된 일정 주기(운전자 설정 가능, 예를 들어, 초기값 30분)로 주의 메세지, 예를 들어, "루프랙에 화물이 있습니다." 와 같은 주의 메세지를 상기 내비게이션 시스템(30) 이나 클러스터(20) 화면에 표시 한다(S017).
If it is determined in step S015 that the current position is not adjacent to the tollgate, the
본 발명의 상기와 같은 바람직한 실시예에서, 설명의 편의상 상술한 단계들을 수행하는 주체로서 상기 내비게이션 시스템(30)을 예로 들어 기술하고 있으나, 본 발명은 이에 한정하는 것은 아니고, 필요시 공지의 통신망을 통하여 정보를 송수신함으로써, 차선이탈경보시스템(10)(LDWS) 또는 클러스터(20)에서 상기 단계들이 수행될 수 있고, 또한, 별도의 제어부(공지의 수단을 포함)가 구비되고, 상기 내비게이션 시스템(30), 차선이탈경보시스템(10) 및 클러스터(20)가 상기 제어부와 연동하여, 상기 단계들이 상기 제어부를 주체로 수행될 수도 있음은 당업자에게 자명하다.
In the above-described preferred embodiment of the present invention, the
이상으로 본 발명의 차선이탈경보시스템을 이용한 차량용 화물 거치대의 충돌 경보 제공 방법의 바람직한 실시예를 상세하게 설명하였으나, 이는 본 발명에 대한 이해를 돕기 위하여 특정한 예를 제시한 것에 지나지 않으며, 본 발명의 범위를 한정하고자 하는 것은 아니다. 여기에 개시된 실시예들 이외에도, 본 발명의 기술적 사상에 바탕을 둔 다른 변형예들이 실시 가능하다는 것은 본 고안이 속하는 기술분야에서 통상의 지식을 가진 자에게 자명한 것이다.
While the present invention has been particularly shown and described with reference to exemplary embodiments thereof, it is to be understood that the invention is not limited to the disclosed exemplary embodiments. It is not intended to limit the scope. It will be apparent to those skilled in the art that other modifications based on the technical idea of the present invention are possible in addition to the embodiments disclosed herein.
10: 차선이탈경보시스템
20: 클러스터
30: 내비게이션 시스템
100: 화물 거치대10: Lane departure warning system
20: Cluster
30: Navigation system
100: Cargo hold
Claims (10)
Translated fromKorean상기 차선이탈경보시스템은 높이제한 구조물의 교통 표지판이 포함하는 제한 높이 정보를 인식하여 TSR정보를 설정하여 제어부로 전송하는 단계;
상기 제어부는 상기 화물 거치대와 연동하여 화물의 거치 여부를 판단하는 단계;
상기 제어부는 상기 화물 거치대에 거치된 화물의 높이를 추정하는 단계;
상기 제어부는 차량 높이와 화물의 높이를 더하여 전체 높이를 산출하는 단계;
상기 제어부는 상기 TSR정보와 상기 전체 높이를 비교하는 단계; 및
상기 제어부는 상기 전체 높이가 상기 TSR정보의 값보다 크면 경보메세지를 출력하는 단계;
를 포함하는 것을 특징으로 하는 차선이탈경보시스템을 이용한 차량용 화물 거치대의 충돌 경보 제공 방법.
A lane departure warning system (LDWS), a cluster, and a lane departure warning system for a vehicle equipped with a luggage stand, the method comprising:
The lane departure warning system recognizes the limited height information included in the traffic sign of the height restricting structure, and sets the TSR information to transmit to the control unit.
The control unit interlocking with the cargo rack to determine whether the cargo is stowed;
The control unit estimating a height of the cargo placed on the cargo rack;
Calculating a total height by adding the height of the vehicle and the height of the cargo;
Comparing the TSR information with the total height; And
If the total height is greater than the value of the TSR information, outputting an alert message;
Wherein the lane departure warning system includes a lane departure warning system.
상기 차량은 내비게이션 시스템을 더 구비하고,
상기 내비게이션 시스템은 현재 위치 인근의 높이제한 구조물의 데이터를 바탕으로 NAVI정보를 설정하여 제어부로 전송하는 단계; 및
상기 제어부는 상기 전체 높이가 상기 NAVI정보의 값보다 크면 경보메세지를 출력하는 단계;
를 더 포함하는 것을 특징으로 하는 차선이탈경보시스템을 이용한 차량용 화물 거치대의 충돌 경보 제공 방법.
The method according to claim 1,
The vehicle further comprises a navigation system,
Setting the NAVI information based on the data of the height restricting structure near the current position and transmitting the NAVI information to the control unit; And
Outputting an alarm message if the total height is greater than the value of the NAVI information;
Wherein the lane departure warning system further comprises a lane departure warning system.
상기 제어부는 상기 TSR 정보와 상기 NAVI정보 중 최소값을 선택하여 제한 높이를 설정하는 단계; 및
상기 제어부는 상기 전체 높이가 상기 제한 높이보다 크면 경보메세지를 출력하는 단계;
를 더 포함하는 것을 특징으로 하는 차선이탈경보시스템을 이용한 차량용 화물 거치대의 충돌 경보 제공 방법.
3. The method of claim 2,
Selecting a minimum value among the TSR information and the NAVI information to set a limit height; And
If the total height is greater than the limit height, outputting an alarm message;
Wherein the lane departure warning system further comprises a lane departure warning system.
상기 제어부는 상기 화물 거치대와 연동하여 화물의 거치 여부를 판단하는 단계는,
상기 화물 거치대는 로터리 방식 스위치를 포함하여 이루어진 하나 이상의 자전거 고정 레버를 포함하고,
상기 로터리 방식 스위치는 상기 자전거 고정 레버의 사용시 회전 입력신호를 출력하여 제어부로 전송하는 단계; 및
상기 제어부는 상기 회전 입력신호를 수신하여 화물의 거치 여부를 판단하는 단계;
를 더 포함하는 것을 특징으로 하는 차선이탈경보시스템을 이용한 차량용 화물 거치대의 충돌 경보 제공 방법.
The method according to claim 1,
Wherein the control unit determines whether the cargo is stowed in conjunction with the cargo rest,
The cargo rest includes one or more bicycle restraints including a rotary switch,
Wherein the rotary type switch outputs a rotation input signal when the bicycle fixing lever is in use and transmits the rotation input signal to the control unit; And
The control unit receiving the rotation input signal to determine whether the cargo is stowed;
Wherein the lane departure warning system further comprises a lane departure warning system.
상기 제어부는 상기 화물 거치대와 연동하여 상기 화물 거치대에 거치된 화물의 거치 여부를 판단하는 단계는,
상기 화물 거치대는 하나 이상의 하중센서를 포함하고,
상기 하중센서는 하중이 가해지면 하중입력신호를 출력하여 상기 제어부로 전송하는 단계; 및
상기 제어부는 상기 하중입력신호를 수신하여 화물의 거치 여부를 판단하는 단계;
를 더 포함하는 것을 특징으로 하는 차선이탈경보시스템을 이용한 차량용 화물 거치대의 충돌 경보 제공 방법.
The method according to claim 1,
Wherein the control unit determines whether the cargo placed on the cargo rack is interlocked with the cargo rack,
Wherein the cargo rest includes at least one load sensor,
The load sensor outputs a load input signal and transmits the load input signal to the controller when a load is applied; And
The control unit receiving the load input signal to determine whether the cargo is stowed;
Wherein the lane departure warning system further comprises a lane departure warning system.
상기 제어부는 상기 화물 거치대와 연동하여 화물의 거치 여부를 판단하는 단계;
상기 화물 거치대는 한쌍의 롤러와 양단이 상기 한쌍의 롤러에 각각 감기는 고정끈과 상기 한쌍의 롤러의 회전을 인지하는 끈 감기용 로터를 포함하고,
상기 끈 감기용 로터는 상기 롤러의 회전시 롤러 회전량 신호를 출력하여 상기 제어부로 전송하는 단계; 및
상기 제어부는 상기 롤러 회전량 신호를 수신하여 화물의 거치 여부 및 화물의 높이를 판단하는 단계;
를 더 포함하는 것을 특징으로 하는 차선이탈경보시스템을 이용한 차량용 화물 거치대의 충돌 경보 제공 방법.
The method according to claim 1,
The control unit interlocking with the cargo rack to determine whether the cargo is stowed;
Wherein the cargo rack comprises a pair of rollers, a fixing strap at both ends of which are wound on the pair of rollers, and a winding rotor for recognizing the rotation of the pair of rollers,
Wherein the belt winding rotor outputs a signal indicating the amount of rotation of the roller when the roller rotates and transmits the signal to the controller; And
The control unit receiving the roll rotation amount signal to determine whether the cargo is stationary or not and determining the height of the cargo;
Wherein the lane departure warning system further comprises a lane departure warning system.
상기 제어부는 화물이 거치된 것으로 판단하면 일정 주기로 주의 메세지를 출력하는 단계;
를 더 포함하는 것을 특징으로 하는 차선이탈경보시스템을 이용한 차량용 화물 거치대의 충돌 경보 제공 방법.
The method according to claim 1,
Outputting a warning message at regular intervals when it is determined that the cargo is stowed;
Wherein the lane departure warning system further comprises a lane departure warning system.
상기 내비게이션 시스템은 설정된 목적지 까지의 경로 내의 높이제한 구조물의 데이터 중 상기 전체 높이보다 낮은 높이제한 구조물이 존재하는 경우, 해당 경로를 제외한 경로를 재검색하여 제공하는 단계;
를 더 포함하는 것을 특징으로 하는 차선이탈경보시스템을 이용한 차량용 화물 거치대의 충돌 경보 제공 방법.
3. The method of claim 2,
If the height restricting structure of the height restricting structure is lower than the total height among the data of the height restricting structure in the path to the set destination, the navigation system re-searches the path except the corresponding path and provides the path;
Wherein the lane departure warning system further comprises a lane departure warning system.
상기 내비게이션 시스템은 현재 위치가 톨게이트에 인접하는지 판단하는 단계; 및
현재 위치가 톨게이트에 인접해 있으면, 상기 제어부는 안내메세지를 출력하고 톨게이트 안내메세지를 출력하는 단계;
를 더 포함하는 것을 특징으로 하는 차선이탈경보시스템을 이용한 차량용 화물 거치대의 충돌 경보 제공 방법.
3. The method of claim 2,
The navigation system determining whether the current location is adjacent to a toll gate; And
If the current location is adjacent to a toll gate, the control section outputs a guidance message and outputs a toll gate guidance message;
Wherein the lane departure warning system further comprises a lane departure warning system.
상기 제어부는,
차선이탈경보시스템(LDWS), 클러스터 또는 내비게이션 시스템 중 하나인 것을 특징으로 하는 차선이탈경보시스템을 이용한 차량용 화물 거치대의 충돌 경보 제공 방법.
The method according to claim 1,
Wherein,
The lane departure warning system (LDWS), the cluster or the navigation system.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR20130137919AKR101462918B1 (en) | 2013-11-13 | 2013-11-13 | Method For Providing A Crash Alarm For Roof Rack Using LDWS |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR20130137919AKR101462918B1 (en) | 2013-11-13 | 2013-11-13 | Method For Providing A Crash Alarm For Roof Rack Using LDWS |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR101462918B1true KR101462918B1 (en) | 2014-11-20 |
Family
ID=52290831
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR20130137919AActiveKR101462918B1 (en) | 2013-11-13 | 2013-11-13 | Method For Providing A Crash Alarm For Roof Rack Using LDWS |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR101462918B1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111661044A (en)* | 2020-06-29 | 2020-09-15 | 浙江吉利新能源商用车集团有限公司 | Vehicle anti-collision control method and system and vehicle |
| KR20210055848A (en) | 2019-11-07 | 2021-05-18 | 최정환 | Safe driving guide system using smartphone mounting device for vehicle |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR19980011318U (en)* | 1996-08-19 | 1998-05-25 | 양재신 | Vehicle Pass Height Limit Warning Device |
| JPH10315888A (en)* | 1997-05-21 | 1998-12-02 | Fuji Heavy Ind Ltd | Alarm device for over-situated obstacle of vehiclecar |
| KR19990069349A (en)* | 1998-02-06 | 1999-09-06 | 이정형 | Height limit warning device for road overload |
| KR20020031924A (en)* | 2000-10-24 | 2002-05-03 | 이계안 | Roof rack of an automobile |
- 2013
- 2013-11-13KRKR20130137919Apatent/KR101462918B1/enactiveActive
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR19980011318U (en)* | 1996-08-19 | 1998-05-25 | 양재신 | Vehicle Pass Height Limit Warning Device |
| JPH10315888A (en)* | 1997-05-21 | 1998-12-02 | Fuji Heavy Ind Ltd | Alarm device for over-situated obstacle of vehiclecar |
| KR19990069349A (en)* | 1998-02-06 | 1999-09-06 | 이정형 | Height limit warning device for road overload |
| KR20020031924A (en)* | 2000-10-24 | 2002-05-03 | 이계안 | Roof rack of an automobile |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20210055848A (en) | 2019-11-07 | 2021-05-18 | 최정환 | Safe driving guide system using smartphone mounting device for vehicle |
| CN111661044A (en)* | 2020-06-29 | 2020-09-15 | 浙江吉利新能源商用车集团有限公司 | Vehicle anti-collision control method and system and vehicle |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11731636B2 (en) | System and method to determine responsiveness of a driver of a vehicle to feedback regarding driving behaviors | |
| CN110871749B (en) | Method and system for controlling a vehicle seating arrangement | |
| US20140257659A1 (en) | Real time risk assessments using risk functions | |
| KR100761418B1 (en) | Emergency situation notification device for vehicle | |
| JP5408344B2 (en) | Parking assistance device | |
| US11427205B2 (en) | Vehicle stop support system | |
| JP2001256598A (en) | Danger spot notification system | |
| US9616747B1 (en) | Method for controlling travel of golf carts and all-terrain vehicles | |
| CN104136260A (en) | Method for safely parking a vehicle in an emergency situation | |
| JP2006195959A (en) | Vehicle safety management system by image processing | |
| CN103959334A (en) | A system for controlling the adjustment of a side rearview device | |
| WO2018163459A1 (en) | Passenger assistance device, method and program | |
| JP2009146203A (en) | Vehicle safety support device | |
| KR101462918B1 (en) | Method For Providing A Crash Alarm For Roof Rack Using LDWS | |
| EP3616965B1 (en) | Vehicle stop support system | |
| US11235762B2 (en) | Vehicle stop support system | |
| US11203336B2 (en) | Vehicle stop support system | |
| EP3616964B1 (en) | Vehicle stop support system | |
| US20250100572A1 (en) | Pedestrian alert system and method for a vehicle | |
| KR20080110567A (en) | Drunk Driving System, Drunk Driving Enforcer and Drink Meter | |
| JP3720716B2 (en) | On-board device for toll collection system | |
| KR20160044833A (en) | Device and method for providing boarding information of passengers | |
| KR20070040041A (en) | Vehicle shade area monitoring device and monitoring method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application | Patent event code:PA01091R01D Comment text:Patent Application Patent event date:20131113 | |
| PA0201 | Request for examination | ||
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration | Patent event code:PE07011S01D Comment text:Decision to Grant Registration Patent event date:20141018 | |
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment | Comment text:Registration of Establishment Patent event date:20141112 Patent event code:PR07011E01D | |
| PR1002 | Payment of registration fee | Payment date:20141113 End annual number:3 Start annual number:1 | |
| PG1601 | Publication of registration | ||
| FPAY | Annual fee payment | Payment date:20181030 Year of fee payment:5 | |
| PR1001 | Payment of annual fee | Payment date:20181030 Start annual number:5 End annual number:5 | |
| FPAY | Annual fee payment | Payment date:20191029 Year of fee payment:6 | |
| PR1001 | Payment of annual fee | Payment date:20191029 Start annual number:6 End annual number:6 | |
| PR1001 | Payment of annual fee | Payment date:20201028 Start annual number:7 End annual number:7 | |
| PR1001 | Payment of annual fee | Payment date:20211027 Start annual number:8 End annual number:8 | |
| PR1001 | Payment of annual fee | Payment date:20221026 Start annual number:9 End annual number:9 | |
| PR1001 | Payment of annual fee | Payment date:20231025 Start annual number:10 End annual number:10 |