KR100928252B1 - Blank frame detection method of traffic channel - Google Patents
Blank frame detection method of traffic channelDownload PDFInfo
- Publication number
- KR100928252B1 KR100928252B1KR1020020043626AKR20020043626AKR100928252B1KR 100928252 B1KR100928252 B1KR 100928252B1KR 1020020043626 AKR1020020043626 AKR 1020020043626AKR 20020043626 AKR20020043626 AKR 20020043626AKR 100928252 B1KR100928252 B1KR 100928252B1
- Authority
- KR
- South Korea
- Prior art keywords
- traffic channel
- channel
- received signal
- empty frame
- frame
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Classifications
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L5/00—Arrangements affording multiple use of the transmission path
- H04L5/003—Arrangements for allocating sub-channels of the transmission path
- H04L5/0044—Allocation of payload; Allocation of data channels, e.g. PDSCH or PUSCH
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W72/00—Local resource management
- H04W72/04—Wireless resource allocation
- H04W72/044—Wireless resource allocation based on the type of the allocated resource
- H04W72/0446—Resources in time domain, e.g. slots or frames
Landscapes
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Mobile Radio Communication Systems (AREA)
Abstract
Translated fromKoreanDescription
Translated fromKorean도 1은 본 발명 제 1 실시예에 따른 트래픽 채널의 빈 프레임 검출 방법을 설명하기 위한 수신단의 블록 구성도를 나타낸 도면1 is a block diagram illustrating a receiver for explaining an empty frame detection method of a traffic channel according to a first embodiment of the present invention.
도 2는 도 1에 나타낸 커토시스 계산부의 상세 블록 구성도를 나타낸 도면2 is a block diagram illustrating a detailed block diagram of the torsion calculation unit shown in FIG. 1;
도 3은 도 1에 나타낸 트래픽 채널의 빈 프레임 검출 방법에서 빈 프레임 검출과 목표 신호대 잡음비 설정 방법을 설명하기 위한 도면FIG. 3 is a view for explaining a method of setting empty frame detection and a target signal-to-noise ratio in the empty frame detection method of the traffic channel shown in FIG.
도 4는 본 발명 제 2 실시예에 따른 트래픽 채널의 빈 프레임 검출 방법을 설명하기 위한 수신단의 블록 구성도를 나타낸 도면4 is a block diagram illustrating a receiving end for explaining a method for detecting an empty frame of a traffic channel according to a second embodiment of the present invention.
도 5는 도 4에 나타낸 커토시스 계산부의 상세 블록 구성도를 나타낸 도면FIG. 5 is a detailed block diagram of the keratos calculation unit shown in FIG. 4. FIG.
도 6은 도 4에 나타낸 트래픽 채널의 빈 프레임 검출 방법에서 빈 프레임 검출과 목표 신호대 잡음비 설정 방법을 설명하기 위한 도면FIG. 6 is a view for explaining a method for setting empty frame and setting a target signal-to-noise ratio in the empty frame detection method of the traffic channel shown in FIG.
도 7은 본 발명 제 3 실시예에 따른 트래픽 채널의 빈 프레임 검출 방법을 설명하기 위한 도면7 is a diagram for describing a method for detecting empty frames of a traffic channel according to a third embodiment of the present invention.
*도면의 주요 부분에 대한 부호의 설명** Description of the symbols for the main parts of the drawings *
11,21,31 : 디스클램블링부12,22,32 : 채널 추정부11, 21, 31:
13,23,33 : 복소수 컨쥬케이트부14,24 : 역확산부13,23,33: complex number conjugate 14,24: despreading unit
15 : 잡음 추정부16,25,34 : 커토시스 계산부17,26,35 : 빈 프레임 검출부15:
18,27,36 : 프레임 품질 측정 및 목표 Eb/No 설정부18,27,36: Frame quality measurement and target Eb / No setting part
본 발명은 트래픽 채널의 빈 프레임 검출에 관한 것으로, 특히 신호 대 잡음비가 작은 경우에도 데이터가 있는 프레임과 없는 프레임을 용이하게 구별할 수 있는 트래픽 채널의 빈 프레임 검출 방법에 관한 것이다.The present invention relates to the detection of empty frames in a traffic channel, and more particularly, to a method of detecting empty frames in a traffic channel that can easily distinguish between frames with data and those with no data even when the signal-to-noise ratio is small.
비연속적으로 데이터 프레임을 전송하는 역방향 링크(Reverse Link)에서 전력제어를 위해서는 트래픽이 있는 프레임과 없는 프레임 구간을 구별해야 한다.In the reverse link that transmits data frames discontinuously, power control needs to distinguish between a frame having traffic and a frame period having no traffic.
현재 트래픽 채널이 없는 구간을 판별하기 위해서 다음의 2가지 방법이 제안되어 있다.The following two methods have been proposed to determine the section in which there is no current traffic channel.
첫 번째 방법은 파일럿 채널과 트래픽 채널의 전력비를 이용한 방법이다.The first method uses the power ratio of the pilot channel and the traffic channel.
이와 같은 첫 번째 방법은, 파일럿 채널과 트래픽 채널의 전력비를 구하여 일정한(설정된) 문턱값을 넘으면 데이터가 있는 프레임으로 간주하고 문턱값에 못 미치면 트래픽이 없는 구간, 즉 빈 프레임(empty frame)으로 간주한다.The first method calculates the power ratio of the pilot channel and the traffic channel, and if it exceeds a predetermined (set) threshold, it is regarded as a frame with data, and if it does not meet the threshold, it is regarded as an interval without traffic, that is, an empty frame. do.
두 번째는 디코딩을 한 후 코딩을 다시 하여 디코딩 전의 시퀀스와 비교하는 방법이다.The second method is to decode and recode to compare with the sequence before decoding.
두 번째 방법은 수신된 트래픽 채널을 디코딩한 후, 역으로 코딩을 하여 디 코딩 전의 트래픽 시퀀스와 비교하여 비트 오차율을 구하여 문턱값과 비교한다. 이때 문턱값보다 작은 비트 오차율을 가지면 트래픽이 있는 프레임으로 간주하고, 반대의 경우에는 트래픽이 없는 구간, 즉 빈 프레임(empty frame)으로 간주한다.In the second method, the received traffic channel is decoded and then coded inversely. The bit error rate is obtained by comparing with the traffic sequence before decoding and compared with the threshold. At this time, if the bit error rate is smaller than the threshold value, it is regarded as a frame with traffic, and in the opposite case, it is regarded as an interval without traffic, that is, an empty frame.
그러나 이와 같은 종래 기술에 있어서는 다음과 같은 문제점이 있었다.However, such a conventional technology has the following problems.
우선 첫 번째 방법에 있어서는, 파일럿 채널과 트래픽 채널의 전력비를 구하여 문턱값과 비교하는 방법은 신호 대 잡음비가 낮은 경우에는 잡음의 전력에 상기한 두 채널의 전력이 묻혀 버려서 신뢰성 있는 값을 구하기가 어려웠고, 또한 신호 대 잡음 전력비에 따라 문턱값을 수정해 주어야 하는 부가적인 과정이 필요한 문제점이 있다.First, in the first method, the method of obtaining the power ratio of the pilot channel and the traffic channel and comparing it with the threshold value is difficult to obtain a reliable value because the power of the two channels is buried in the power of the noise when the signal-to-noise ratio is low. In addition, there is a problem in that an additional process of correcting the threshold value according to the signal-to-noise power ratio is required.
그리고 두 번째 방법에 있어서는, 데이터를 다시 코딩하는 부가적인 과정이 필요하고, 비트 오차율에 대한 문턱값이 신호 대 잡음 전력비에 민감하며 문턱값이 예민하여 적절한 문턱값을 조금만 벗어나도 결과가 매우 나빠진다는 문제점이 있었다.In the second method, an additional process of recoding the data is required, and the threshold for the bit error rate is sensitive to the signal-to-noise power ratio, and the threshold is sensitive so that the result is very bad even if the deviation from the appropriate threshold is small. There was a problem.
본 발명은 이상에서 언급한 종래 기술의 문제점을 감안하여 안출한 것으로서, 가우시안 잡음의 특성 중 하나인 제로 커토시스(zero kurtosis)를 이용하여 신호 대 잡음비가 작은 경우에도 신뢰도 높게 트래픽이 있는 프레임과 없는 프레임을 구분할 수 있는 트래픽 채널에서의 빈 프레임 검출 방법을 제공하기 위한 것이다.SUMMARY OF THE INVENTION The present invention has been made in view of the above-mentioned problems of the prior art, and uses zero kurtosis, which is one of the characteristics of Gaussian noise, to ensure that even when the signal-to-noise ratio is small, a frame with no traffic is highly reliable. An object of the present invention is to provide an empty frame detection method in a traffic channel capable of classifying a frame.
이상과 같은 본 발명의 트래픽 채널에서의 빈 프레임 검출 방법의 일 특징에 따르면, 위상 보정된 수신신호를 역확산하여 트래픽 채널을 구하고, 상기 수신신호 의 잡음성분을 추정하는 단계와, 상기 트래픽 채널에 대한 커토시스 및 상기 잡음성분에 대하여 각각 커토시스를 계산하는 단계와, 상기 커토시스 계산값을 이용하여 상기 수신신호의 빈프레임을 검출하는 단계로 이루어진다.According to one aspect of the empty frame detection method in the traffic channel of the present invention, despreading a phase-corrected received signal to obtain a traffic channel, estimating a noise component of the received signal, Computing the respective kosis and the noise component, and detecting the empty frame of the received signal by using the calculation value.
바람직하게 상기 트래픽 채널에 대한 커토시스와 상기 잡음 성분에 대한 커토시스의 차를 설정된 문턱값과 비교하여 상기 트래픽 채널의 빈프레임 여부를 판단한다.Preferably, whether the traffic channel is empty or not is determined by comparing the difference between the ktosis for the traffic channel and the ktosis for the noise component with a set threshold.
그리고 상기 수신신호에 대하여 채널 추정하여 구한 채널 계수를 이용하여 복소수 컨쥬케이팅하여 상기 위상 보정을 수행하는 단계를 더 포함하여 이루어진다.And performing complex phase conjugation by using a channel coefficient obtained by channel estimation on the received signal.
바람직하게, 상기 수신 신호에 대한 빈 프레임을 검출하는 단계 이후에, 상기 트래픽 채널에서의 유효 프레임에 대한 품질을 측정하는 단계와, 상기 유효 프레임 측정 결과에 따라 송신 및/또는 수신 전력 제어에 사용되는 신호대 잡음비를 설정하는 단계를 더 포함하여 이루어진다.Preferably, after detecting the empty frame for the received signal, measuring the quality of the valid frame in the traffic channel and used for transmission and / or reception power control according to the valid frame measurement result. And setting the signal-to-noise ratio.
이와 같은 본 발명 트래픽 채널에서의 빈 프레임 검출 방법의 다른 특징에 따르면, 수신신호를 역확산하여 파일럿 채널과 트래픽 채널을 구분하는 단계와, 상기 파일럿 채널과 트래픽 채널의 각각에 대한 커토시스 연산을 이용하여 상기 수신 신호의 빈 프레임을 검출하는 단계로 이루어진다.According to another aspect of the present invention, a method for detecting an empty frame in a traffic channel includes despreading a received signal to distinguish a pilot channel and a traffic channel, and using a corpussis operation for each of the pilot channel and the traffic channel. Detecting an empty frame of the received signal.
바람직하게 상기 트래픽 채널에 대한 커토시스대 파일럿 채널에 대한 커토시스비를 설정된 문턱값과 비교하여 상기 트래픽 채널의 빈 프레임의 여부를 판단한다하는 것을 특징으로 하는 트래픽 채널의 빈 프레임 검출 방법.Preferably, the empty frame detection method of the traffic channel is determined by comparing the keratos ratio for the traffic channel to the traffic channel with a set threshold value.
이와 같은 본 발명 트래픽 채널에서의 빈 프레임 검출 방법의 또 다른 특징에 따르면, 위상 보정된 수신신호를 역확산하여 트래픽 채널을 구분하는 단계와, 상기 트래픽 채널에 대한 커토시스 연산을 하는 단계와, 상기 트래픽 채널에 대한 커토시스 연산값을 임계값과 비교하는 것에 따라 상기 트래픽 채널의 빈 프레임을 검출하는 단계로 이루어진다.According to still another aspect of the present invention, a method for detecting an empty frame in a traffic channel includes despreading a phase-corrected received signal to classify a traffic channel, performing a corpussis operation on the traffic channel, and Detecting an empty frame of the traffic channel according to the comparison of the corpussis operation value for the traffic channel with a threshold.
바람직하게, 상기 수신신호의 부가 잡음은 가우시안 잡음으로 가정한 후 상기 트래픽 채널에 대한 커토시스만을 계산하는 것으로 상기 수신 신호의 빈 프레임을 검출한다.Preferably, the additional noise of the received signal is assumed to be Gaussian noise, and then the empty frame of the received signal is detected by calculating only the torsion for the traffic channel.
본 발명의 다른 목적, 특성 및 이점들은 첨부한 도면을 참조한 실시예들의 상세한 설명을 통해 명백해 질 것이다.Other objects, features and advantages of the present invention will become apparent from the following detailed description of embodiments taken in conjunction with the accompanying drawings.
이하 본 발명의 바람직한 일 실시 예에 따른 구성 및 작용을 첨부된 도면을 참조하여 설명한다.Hereinafter, a configuration and an operation according to an exemplary embodiment of the present invention will be described with reference to the accompanying drawings.
본 발명에서는 비연속적으로 데이터 프레임을 전송하는 역방향 링크(Reverse Link)에서 전력제어를 위해 트래픽이 있는 프레임과 없는 구간을 구별해야 하는 경우, 특히 신호 대 잡음비가 작은 경우에는 단순히 전력비만으로 구별하기가 어려운 경우에 가우시안 잡음의 특성 중 하나인 제로 커토시스(zero kurtosis)를 이용하여 신호 대 잡음비가 작은 경우에도 신뢰도 높게 트래픽이 있는 프레임과 없는 구간을 구별하는 방법을 제공한다According to the present invention, when it is necessary to distinguish a frame with traffic and a section without traffic in a reverse link that transmits data frames discontinuously, in particular, when a signal-to-noise ratio is small, it is difficult to distinguish simply by power ratio. In case of difficulty, we use zero kurtosis, which is one of the characteristics of Gaussian noise, to provide a reliable method to distinguish between frames with and without traffic even when the signal-to-noise ratio is small.
도 1은 본 발명 제 1 실시예에 따른 트래픽 채널의 빈 프레임 검출 방법을 설명하기 위한 도면이다.1 is a diagram illustrating a method for detecting an empty frame of a traffic channel according to a first embodiment of the present invention.
본 발명 제 1 실시예에 따른 트래픽 채널의 빈 프레임 검출 방법은 도 1에 나타낸 바와 같이, 수신 신호를 디스크램블링하는 디스크램블링부(11)와, 디스크램블링된 신호에서 채널계수를 추정하는 채널 추정부(12)와 채널 추정부(12)에서 추정된 채널 계수에 대한 복소수 컨쥬게이트를 취하여 위상 쉬프트 및 감쇄성분 등을 제거(위상 보정)하는 복소수 컨쥬게이트부(13)와, 디스크램블링된 신호와 복소수 컨쥬게이팅된 채널 계수의 곱에 대하여 트래픽 채널에서 파일럿 채널을 분리(역확산)하는 역확산부(14)와, 디스크램블링된 신호와 복소수 컨쥬게이팅된 채널 계수의 곱에 대한 잡음을 추정하는 잡음 추정부(15)와, 역확산된 채널 신호와 추정된 잡음에 따라 빈 프레임 검출에 필요한 파라미터를 구하는 커토시스 계산부(16)와, 커토시스 계산부(16)에서 구한 파라미터와 설정된 문턱값과 비교하여 트래픽 채널에서 빈 프레임을 검출하는 빈 프레임 검출부(17)와, 트래픽 채널에서의 유효 프레임에 대한 프레임 품질을 측정하고, 그 결과를 바탕으로 외부 전원 제어에서 사용될 신호대 잡음비를 설정하는 프레임 품질 측정 및 목표 신호대 잡음비 설정부(18)로 구성된다.In the empty frame detection method of the traffic channel according to the first embodiment of the present invention, as shown in FIG. 1, a
이때, 디스크램블링부(11)에서 디스크램블링하여 출력된 신호를 x라 하고, 무선 채널 환경, 상태 및 신호 왜곡 등을 표현하는 채널 계수를 a 라하며, 전송단에서 보낸 전송신호를 s라 하고, 부가 잡음을 n 이라 할 때, x = as + n으로 나타낸다. 이때 전송신호 s에는 파일럿 채널과 트래픽 채널이 있으며, 트래픽 채널이 없는 경우에도 파일럿 채널은 존재한다.In this case, a signal output by descrambling by the descrambling
채널 추정부(12)는 디스크램블링된 신호에 대하여 채널 추정(Channel Estimation)을 하여 채널 계수 a를 구하는데, 채널 추정부(12)에서의 채널 추정 결과를 a'라 한다. 채널 추정 결과 값 a'은 복소수 컨쥬게이트부(13)에서 복소수 컨쥬게이트를 취하여 위상 쉬프트 및 감쇄성분 등이 제거 즉 위상 보정되고, 곱셈기에서 디스클램블링 신호 x = as + n과 곱해지고, 역확산부(14)와 잡음 추정부(15)로 송신된다.The
역확산부(14)는 왈쉬 코드를 사용하여 트래픽 채널에서 파일럿 채널을 분리한 결과값 y를 출력시킨다.The
잡음 추정부(15)는 채널 계수 a와 부가 잡음 n의 곱, 즉 a*n을 추정하여 그 결과값인 n'(잡음 계수)을 출력시킨다.The
커토시스 계산부(16)는 y와 n'의 커토시스(Kurtosis)를 계산하여 빈 프레임 검출(Empty Frame Detection)에 필요한 파라미터를 구한다.The
빈 프레임 검출부(17)는 커토시스 계산부(16)에서 계산된 파라미터를 적절한 문턱값과 비교하여 트래픽 채널의 유/무를 판단한다.The empty
프레임 품질 측정 및 목표 신호대 잡음비 설정부(18)는 프레임의 주기적 덧(붙임) 검사(cyclic redundancy checking : CRC) 등을 통하여 굿/배드(Good/Bad) 프레임을 판정하고, 그 결과를 바탕으로 외부 전력 제어(Outer Power Control)에서 사용될 신호대 잡음비(Eb/No)의 목표치를 설정한다.The frame quality measurement and target signal-to-noise
도 2는 도 1에 나타낸 커토시스 계산부의 상세 블록 구성도이다.FIG. 2 is a detailed block diagram of the currosis calculation unit shown in FIG. 1.
본 발명 도 1에 나타낸 커토시스 계산부를 상세히 나타낸 도 2에서 Z-1은 하나의 심볼 지연을 의미하는 것으로, 이러한 심볼지연은 트래픽 채널을 파일럿 채널과 분리한 결과값인 y와 잡음 계수 n'를 입력으로 하는 가지마다 N개씩 있으며, y와 n'은 N개의 제곱기와 4제곱기에서 각각 제곱 및 4제곱된 후 각각 덧셈부에서 합산된 후 다시 각각 1/N되고, 그 중 제곱근된 후 1/N 된 값이 -3( )2되어 4제곱된 후 1/N된 값과 덧셈된 값과 합산된다. 그 후 최종적으로 y의 커토시스인 kur(y)와, n'의 커토시스인 kur(n')의 차(-)가 덧셈기에서 출력된다.In FIG. 2, in which the keratos calculation unit shown in FIG. 1 is shown in detail, Z-1 denotes one symbol delay. The symbol delay is obtained by y and a noise coefficient n ', which are a result of separating the traffic channel from the pilot channel. There are N for each branch to be input, and y and n 'are squared and quadrupled in N squares and 4 squares, respectively, and then summed at the adder and then 1 / N, respectively. The value of N is -3 ()2, which is squared to 4, and then added to the 1 / N and added values. After that, the difference (-) between kur (y), which is the y's cessation, and kur (n '), which is the n's, is output from the adder.
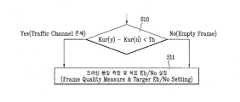
도 3은 도 1에 나타낸 트래픽 채널의 빈 프레임 검출 방법에서 빈 프레임 검출과 목표 신호대 잡음비 설정 방법을 설명하기 위한 도면이다.FIG. 3 is a diagram for describing a method for setting empty frame and setting a target signal-to-noise ratio in the empty frame detection method of the traffic channel shown in FIG. 1.
즉 도 2에서의 결과값은 y의 커토시스인 kur(y)와, n'의 커토시스인 kur(n')의 차(-)의 판단결과(S10), 결과값이 설정된 문턱값보다 작은 경우에는 트래픽 채널이 존재한다는 것이고, 그 차의 결과값이 설정된 문턱값보다 작지 않은 경우에는 빈 프레임이라는 것으로, 트래픽 채널이 존재하지 않는 경우이다.In other words, the result value in FIG. 2 is the result of the determination (S10) of the difference (-) between the kur (y), which is the kthsis of y, and the kur (n '), which is n', and the resultant value is smaller than the set threshold. In this case, there is a traffic channel. If the result of the difference is not smaller than the set threshold, it is an empty frame, and there is no traffic channel.
이때 앞에서도 설명한 바와 같이 프레임 품질 측정 및 목표 신호대 잡음비 설정 단계(S11)에서는, 주기적 덧(붙임) 검사(CRC) 등을 통하여 굿/배드(Good/Bad) 프레임을 판정하여, CRC 굿(Good)의 경우에는 전력을 낮추고, CRC 배드(Bad)의 경우에는 전력을 높이는 식으로 신호대 잡음비(Eb/No)의 목표치를 설정한다.At this time, as described above, in the frame quality measurement and the target signal-to-noise ratio setting step (S11), a good / bad frame is determined through a cyclic additive test (CRC), and the CRC good. In the case of, the power is lowered, and in the case of the CRC bad, the power is increased to set the target value of the signal-to-noise ratio (Eb / No).
이와 같은 본 발명 제 1 실시예에 따른 빈 프레임 검출 방법은, 우선 안테나에 수신된 신호를 디스크램블링한 신호를 x=as+n 라고 할 때, 트래픽 채널이 없는 경우 s는 파일럿 채널만 존재하고 트래픽 채널이 있는 경우 s는 트래픽 채널과 파일럿 채널이 같이 존재한다. 파일럿 채널을 이용하여 채널 계수 a를 구하는 채널 추정부(12)를 통과하면 a의 추정치인 a'을 구할 수 있다.In the empty frame detection method according to the first embodiment of the present invention, when x = as + n is a signal descrambled a signal received at an antenna, s is only a pilot channel and there is no traffic channel. If there is a channel, s is a traffic channel and a pilot channel. If the channel passes through the
a'가 a에 근사한 값이라면 역확산부(14)로 입력되는 값 a' * x = a' * as + a' * n = a2s + a*n 이 된다If a 'is close to a, the value input to
역확산부(14)에서는 역화산부(14)로 입력된 값 a2s + a*n을 트래픽 채널에 사용한 왈쉬 코드로 역확산하고, 역확산결과에 따른 값을 y라 하면 y에는 트래픽 채널과 잡음 성분만이 남게 된다. 이를 식 1과 같이 나타낼 수 있다.The

여기서, d는 트래픽 채널의 데이터 성분이다.Where d is the data component of the traffic channel.
잡음 추정부(15)에서는 파일럿과 트래픽 채널에 사용되지 않는 왈쉬 코드를 사용하여 n'을 구한다.The
커토시스 계산부에서는 상기한 바와 같은 y와 n'의 커토시스를 계산한다. 이때 제로-미인(zero-mean) 확률변수에 의한 커토시스 정의는 다음 식 2와 같다.The keratosity calculator calculates the keratoses of y and n 'as described above. At this time, the definition of the ketosis by the zero-mean random variable is shown in
여기서 E(ㆍ)는 기대값(Expectation)이다. 실제 구현상에서는 E(ㆍ)를 식 3 과 같이 추정한다.Where E (·) is the expected value. In actual implementation, E (·) is estimated as

커토시스 계산부(16)에서 계산한 kur(y)는 커토시스의 다음과 같은 특징에 의해 kur(y) = a8kur(d) + kur(
특징 1 : kur(x+y) = kur(x) +kur(y)Feature 1: kur (x + y) = kur (x) + kur (y)
특징 2 : kur(ax) = a4kur(x)Feature 2: kur (ax) = a4 kur (x)
kur(
여기에서 d는 ±G 값을 같은 확률 값으로 갖는 이산 데이터임을 감안할 때 a8kur(d) = -2a8G4라는 등식이 성립한다. 여기서 G는 송신이득이다.Here, the equation a8 kur (d) = -2a8 G4 holds because d is discrete data with the same probability value. Where G is the transmit gain.
빈 프레임 검출부(17)에서는 kur(y)-kur(n')을 0과 비교하여 0보다 작으면 a8kur(d) = -2a8G4〈 0에 의한 결과로 판단하여 트래픽 채널이 있다고 판정을 내리게 되고, 0보다 작지 않으면 트래픽 채널이 없다고 판정을 내리게 된다. 이때 도 3의 문턱값(Th)은 0이다.The empty
이후 트래픽 채널이 있다는 판정이 내려지면 기존의 CRC 체크 등의 프레임 품질을 추정하여 전력제어에 이용하면 되고, 트래픽 채널이 없다는 판정이 내려지 면 전력제어를 수행하지 않는다.Thereafter, if it is determined that there is a traffic channel, the frame quality of the existing CRC check may be estimated and used for power control. If it is determined that there is no traffic channel, power control is not performed.
도 4는 본 발명 제 2 실시예에 따른 트래픽 채널의 빈 프레임 검출 방법을 설명하기 위한 도면이고, 도 5는 도 4에 나타낸 커토시스 계산부의 상세 블록 구성도이며, 도 6은 도 4에 나타낸 트래픽 채널의 빈 프레임 검출 방법에서 빈 프레임 검출과 목표 신호대 잡음비 설정 방법을 설명하기 위한 도면이다.FIG. 4 is a diagram illustrating a method for detecting an empty frame of a traffic channel according to a second embodiment of the present invention. FIG. 5 is a detailed block diagram of a traffic calculation unit shown in FIG. 4, and FIG. 6 is a traffic diagram of FIG. 4. In the empty frame detection method of the channel, the empty frame detection and the target signal-to-noise ratio setting method.
본 발명 제 2 실시예는 본 발명 제 1 실시예에서의 부가 잡음 n'에 대한 커토시스 계산을 생략하여 잡음추정에 대한 부담을 줄인 것으로, 부가 잡음 대신 파일럿 채널 a와 트래픽 채널 y의 커토시스 kur(a)와 kur(y)의 비인 kur(y)/kur(a)를 이용해 빈 채널을 검출하는 방법을 설명한다.The second embodiment of the present invention reduces the burden on the noise estimation by omitting the torsion calculation for the additional noise n 'in the first embodiment of the present invention, and the kursis kur of the pilot channel a and the traffic channel y instead of the additional noise. A method of detecting an empty channel using kur (y) / kur (a), which is a ratio of (a) to kur (y), will be described.
본 발명 제 2 실시예에 따른 트래픽 채널의 빈 프레임 검출 방법은 도 4에 나타낸 바와 같이, 수신 신호를 디스크램블링하는 디스크램블링부(21)와, 디스크램블링된 신호에서 채널계수를 추정하는 채널 추정부(22)와, 채널 추정부(22)에서 추정된 채널 계수에 대한 복소수 컨쥬게이트를 취하여 위상 쉬프트 및 감쇄성분을 제거(즉 위상 보정)하는 복소수 컨쥬게이트부(23)와, 디스크램블링된 신호와 복소수 컨쥬게이팅된 채널 계수의 곱의 결과값에 대하여 트래픽 채널에서 파일럿 채널을 분리(역확산)하는 역확산부(24)와, 채널 추정부(22)에서 추정된 채널 계수 중 파일럿 채널에 대한 커토시스와, 상기 역확산된 트래픽 채널에 대한 커토시스를 계산한 후, 트래픽채널에 대한 커토시스대 파일럿 채널에 대한 커토시스비를 계산하는 커토시스 계산부(25)와, 커토시스 계산부(25)에서 구한 파라미터와 설정된 문턱값과 비교하여 트래픽 채널에서 빈 프레임을 검출하는 빈 프레임 검출부(26)와, 트래픽 채널에서의 유효 프레임에 대한 프레임 품질을 측정하고, 그 결과를 바탕으로 외부 전원 제어에서 사용될 신호대 잡음비를 설정하는 프레임 품질 측정 및 목표 신호대 잡음비 설정부(27)로 구성된다.In the empty frame detection method of the traffic channel according to the second embodiment of the present invention, as illustrated in FIG. 4, a
이때, 디스크램블링부(21)에서 디스크램블링하여 출력된 신호를 x라 하고, 무선 채널 환경, 상태 및 신호 왜곡 등을 표현하는 채널 계수를 a 라하며, 전송단에서 보낸 전송신호를 s라 하고, 부가 잡음을 n 이라 할 때, x = as + n으로 나타낸다. 이때 전송신호 s에는 파일럿 채널과 트래픽 채널이 있으며, 트래픽 채널이 없는 경우에도 파일럿 채널은 존재한다.In this case, the signal output by descrambling by the descrambling
채널 추정부(22)는 디스크램블링된 신호에 대하여 채널 추정(Channel Estimation)을 하여 채널 계수 a를 구하는데, 채널 추정부(22)에서의 채널 추정 결과를 a'라 한다. 채널 추정 결과 값 a'은 복소수 컨쥬게이트부(23)에서 복소수 컨쥬게이트를 취하여 위상 쉬프트 및 감쇄성분 등이 제거(위상 보정)되고, 곱셈기에서 디스클램블링 신호 x = as + n과 곱해지고, 역확산부(24)로 송신된다.The
역확산부(24)는 왈쉬 코드를 사용하여 트래픽 채널에서 파일럿 채널을 분리한 결과값 y를 커토시스 계산부(25)로 출력시킨다.The
커토시스 계산부(25)는 채널 추정부(22)로부터의 파일럿 채널에 대한 채널 계수 a'와 트래픽 채널에서 파일럿 채널을 분리한 값 y를 각각 도 5에 나타낸 바와 같은 커토시스 계산부(25)를 이용하여 각각의 커토시스를 계산하고 그 비율을 출력한다.The
빈 프레임 검출부(26)는 커토시스 계산부(25)에서 계산된 파라미터를 적절한 문턱값과 비교하여 트래픽 채널의 유/무를 판단한다. 이때, 도 5에 나타낸 바와 같이 커토시스 계산부(25)에서는 y의 커토시스인 kur(y)에 대한 a'의 커토시스인 kur(a')의 비(kur(y)/kur(a'))의 절대값이 문턱값보다 큰가를 판단한다(S20).The empty
프레임 품질 측정 및 목표 신호대 잡음비 설정부(27)는 프레임의 주기적 덧(붙임) 검사(cyclic redundancy checking : CRC) 등을 통하여 굿/배드(Good/Bad) 프레임을 판정하고, 그 결과를 바탕으로 외부 전력 제어(Outer Power Control)에서 사용될 신호대 잡음비(Eb/No)의 목표치를 설정한다.The frame quality measurement and target signal-to-noise
이때 커토시스 계산부의 상세 블록 구성도를 나타낸 도 5는 도 2에 나타낸 본 발명 제 1 실시예의 커토시스 계산부와 거의 유사하다.5 is a block diagram showing a detailed block diagram of the keratos calculation unit.
즉 도 5에서 Z-1은 하나의 심볼 지연을 의미하는 것으로, 이러한 심볼지연은 트래픽 채널을 파일럿 채널과 분리한 결과값인 y와 잡음 계수 a'을 입력으로 하는 가지마다 N개씩 있으며, y와 a'은 N개의 제곱기와 4제곱기에서 각각 제곱 및 4제곱된 후 각각 합산된 후 다시 1/N되고, 그 중 제곱근된 후 1/N 된 값이 -3( )2 되고, 4제곱된 후 1/N된 값과 덧셈된 값과 덧셈기에서 각각 덧셈되어 출력되고, 최종적으로 y의 커토시스인 kur(y)를, a'의 커토시스인 kur(a')로 나눈( ÷) 값이 출력된다.That is, in FIG. 5, Z-1 denotes one symbol delay. There are N symbol delays each of which is a result of separating the traffic channel from the pilot channel and n each of the branches having the noise coefficient a '. a 'is squared and squared in N squares and quadratic squares, respectively, and then summed again, then 1 / N, after the square root of 1 / N becomes -3 ()2, and squared The 1 / N value, the added value, and the adder are added and output, respectively. Finally, the value of kur (y), which is the y's cadence, divided by kur (a '), which is the k's, is output (÷). do.
이때, 도 6에 나타낸 바와 같이, 판단결과(S20)의 결과값이 설정된 문턱값(예를 들면, 0)보다 큰 경우에는 트래픽 채널이 존재하는 경우이고, 판단결과(S20)의 결과값이 설정된 문턱값보다 크지 않은 경우에는 트래픽 채널이 존재하지 않는 빈 프레임인 경우이다.In this case, as shown in FIG. 6, when the result value of the determination result S20 is greater than the set threshold value (for example, 0), the traffic channel exists, and the result value of the determination result S20 is set. If it is not greater than the threshold, it is a case of an empty frame in which no traffic channel exists.
그리고 앞에서도 설명한 바와 같이 프레임 품질 측정 및 목표 신호대 잡음비 설정 단계(S21)에서는, 주기적 덧(붙임) 검사(CRC) 등을 통하여 굿/배드(Good/Bad) 프레임을 판단하여, CRC 굿(Good)의 경우에는 전력을 낮추고, CRC 배드(Bad)의 경우에는 전력을 높이는 식으로 신호대 잡음비(Eb/No)의 목표치를 설정한다.As described above, in the frame quality measurement and the target signal-to-noise ratio setting step (S21), a good / bad frame is determined through a cyclic redundancy check (CRC) or the like, and the CRC good In the case of, the power is lowered, and in the case of the CRC bad, the power is increased to set the target value of the signal-to-noise ratio (Eb / No).
도 7은 본 발명 제 3 실시예에 따른 트래픽 채널의 빈 프레임 검출 방법을 설명하기 위한 도면이다.FIG. 7 illustrates a method for detecting an empty frame of a traffic channel according to a third embodiment of the present invention.
발명 제 3 실시예에서는 도 1에서 설명한 부가 잡음(n')을 가우시안 잡음이라고 가정한 경우로써, 부가잡음(n')을 가우시안 잡음이라고 가정하는 경우, 부가 잡음(n')의 커토시스 결과값 kur(n')은 이론적으로 0이므로, 커토시스 계산부(34)에서는 트래픽 채널에서 파일럿 채널을 제거한 결과값 y의 커토시스 결과값 kur(y)만을 구하고, 빈 프레임 검출부(35)에서는 kur(y)이 0보다 작은가(빈 프레임 인가)의 성립 여부만 확인하면 된다. 나머지, 디스크램블링부(31), 채널 추정부(32), 복소수 컨쥬게이트부(33) 및 프레임 품질 측정 및 목표 신호대 잡음비 설정부(36)는 도 1과 동일한 작용을 하므로 그에 대한 상세한 설명은 생략한다.In the third embodiment of the present invention, it is assumed that the additional noise n 'described with reference to FIG. 1 is a Gaussian noise, and when the additional noise n' is assumed to be Gaussian noise, the result of the kerosis of the additional noise n 'is assumed. Since kur (n ') is 0 in theory, the
이상 설명한 내용을 통해 당업자라면 본 발명의 기술 사상을 일탈하지 아니하는 범위에서 다양한 변경 및 수정이 가능함을 알 수 있을 것이다.Those skilled in the art will appreciate that various changes and modifications can be made without departing from the spirit of the present invention.
따라서, 본 발명의 기술적 범위는 실시예에 기재된 내용으로 한정되는 것이 아니라 특허 청구의 범위에 의하여 정해져야 한다.Therefore, the technical scope of the present invention should not be limited to the contents described in the embodiments, but should be defined by the claims.
본 발명에 따른 빈 프레임 검출 방법에 있어서는 신호 대 잡음비가 낮은 경우에도 신뢰도 높게 트래픽 채널이 있는 프레임과 없는 프레임을 검출할 수 있는 효과가 있다. In the empty frame detection method according to the present invention, even when the signal-to-noise ratio is low, it is possible to detect frames with and without traffic channels with high reliability.
Claims (8)
Translated fromKoreanPriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020020043626AKR100928252B1 (en) | 2002-07-24 | 2002-07-24 | Blank frame detection method of traffic channel |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020020043626AKR100928252B1 (en) | 2002-07-24 | 2002-07-24 | Blank frame detection method of traffic channel |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20040009620A KR20040009620A (en) | 2004-01-31 |
| KR100928252B1true KR100928252B1 (en) | 2009-11-24 |
Family
ID=37318520
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020020043626AExpired - Fee RelatedKR100928252B1 (en) | 2002-07-24 | 2002-07-24 | Blank frame detection method of traffic channel |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR100928252B1 (en) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008140238A2 (en)* | 2007-05-15 | 2008-11-20 | Hyun Woo Lee | Karaoke system with usb host play and vocal reduction |
| KR100944994B1 (en)* | 2007-07-04 | 2010-03-05 | 삼성전자주식회사 | Apparatus and method for generating effective signal-to-noise ratio for each stream in a multiple input / output wireless communication system |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20000056210A (en)* | 1999-02-13 | 2000-09-15 | 윤종용 | Method of contiguous outer loop power control in dtx mode of cdma mobile communication system |
| KR20000075369A (en)* | 1999-05-29 | 2000-12-15 | 윤종용 | Transceiver apparatus and method for continuous outer loop power control in dtx mode of cdma mobile communication system |
| KR20020000547A (en)* | 2000-01-13 | 2002-01-05 | 요트.게.아. 롤페즈 | Noise reduction |
| KR20020012011A (en)* | 1999-07-21 | 2002-02-09 | 러셀 비. 밀러 | Mobile station supervision of the forward dedicated control channel when in the discontinuous transmission mode |
| KR20030060507A (en)* | 2002-01-09 | 2003-07-16 | 삼성전자주식회사 | Method and apparatus for detecting discontinuous transmission interval in a cdma mobile communication system |
- 2002
- 2002-07-24KRKR1020020043626Apatent/KR100928252B1/ennot_activeExpired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20000056210A (en)* | 1999-02-13 | 2000-09-15 | 윤종용 | Method of contiguous outer loop power control in dtx mode of cdma mobile communication system |
| KR20000075369A (en)* | 1999-05-29 | 2000-12-15 | 윤종용 | Transceiver apparatus and method for continuous outer loop power control in dtx mode of cdma mobile communication system |
| KR20020012011A (en)* | 1999-07-21 | 2002-02-09 | 러셀 비. 밀러 | Mobile station supervision of the forward dedicated control channel when in the discontinuous transmission mode |
| KR20020000547A (en)* | 2000-01-13 | 2002-01-05 | 요트.게.아. 롤페즈 | Noise reduction |
| KR20030060507A (en)* | 2002-01-09 | 2003-07-16 | 삼성전자주식회사 | Method and apparatus for detecting discontinuous transmission interval in a cdma mobile communication system |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20040009620A (en) | 2004-01-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8681899B2 (en) | Method and apparatus for processing signals received from a channel having a variable channel length | |
| CN112236945B (en) | Interference detection and suppression in uncoordinated systems | |
| EP1210803B1 (en) | Determination of data rate, based on power spectral density estimates | |
| US20040240481A1 (en) | Communication system, receiver apparatus and communicating method | |
| US20030128744A1 (en) | Apparatus and method for detecting discontinuous transmission period in a CDMA mobile communication system | |
| US7548595B2 (en) | Apparatus and method for fading frequency estimation | |
| US20020110140A1 (en) | Spreading factor determination | |
| US20150139219A1 (en) | Method and apparatus for estimating frequency errors | |
| US6892053B2 (en) | Bit error estimates from pilot signals | |
| JP2006014334A (en) | Symbol timing error detecting device using channel profile of digital receiver and symbol timing error detecting method thereof | |
| US8365032B2 (en) | System and method for multiple input, multiple output (MIMO) communications | |
| US9528243B1 (en) | Iterative method, and apparatus for acquiring time and frequency synchronization in a DSSS receiver | |
| KR100928252B1 (en) | Blank frame detection method of traffic channel | |
| US7031265B2 (en) | Method and apparatus for performing packet detection processing | |
| US6748031B1 (en) | Method of parameter estimation and receiver | |
| US20030081633A1 (en) | Method and apparatus of pilot signal synchronization verifier | |
| KR20020027797A (en) | Apparatus and method for detecting transmitting rate of turbo decoder | |
| US10476731B2 (en) | Joint noncoherent demodulation and carrier frequency offset correction based on non-linear filtering | |
| US10951338B2 (en) | Soft value extraction method and device applicable to OvXDM system, and OvXDM system | |
| US20170180182A1 (en) | Joint noncoherent demodulation and carrier frequency offset correction based on non-linear filtering | |
| US11742950B2 (en) | Wavelength dispersion amount calculation apparatus and wavelength dispersion amount calculation method | |
| US20030156539A1 (en) | Method and device with improved channel equalization for mobile radio communications | |
| JP4167264B2 (en) | Apparatus and method for estimating the speed of a mobile terminal in a mobile communication system | |
| US20240333468A1 (en) | Signal processing apparatus, signal processing method, and non-transitory storage medium storing signal processing program | |
| RU171372U1 (en) | DEVICE FOR ESTABLISHING CYCLING SYNCHRONIZATION BASED ON ASSESSED QUALITY INDICATORS |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PA0109 | Patent application | St.27 status event code:A-0-1-A10-A12-nap-PA0109 | |
| R18-X000 | Changes to party contact information recorded | St.27 status event code:A-3-3-R10-R18-oth-X000 | |
| PG1501 | Laying open of application | St.27 status event code:A-1-1-Q10-Q12-nap-PG1501 | |
| A201 | Request for examination | ||
| PA0201 | Request for examination | St.27 status event code:A-1-2-D10-D11-exm-PA0201 | |
| D13-X000 | Search requested | St.27 status event code:A-1-2-D10-D13-srh-X000 | |
| D14-X000 | Search report completed | St.27 status event code:A-1-2-D10-D14-srh-X000 | |
| PN2301 | Change of applicant | St.27 status event code:A-3-3-R10-R13-asn-PN2301 St.27 status event code:A-3-3-R10-R11-asn-PN2301 | |
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection | St.27 status event code:A-1-2-D10-D21-exm-PE0902 | |
| R18-X000 | Changes to party contact information recorded | St.27 status event code:A-3-3-R10-R18-oth-X000 | |
| P11-X000 | Amendment of application requested | St.27 status event code:A-2-2-P10-P11-nap-X000 | |
| P13-X000 | Application amended | St.27 status event code:A-2-2-P10-P13-nap-X000 | |
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration | St.27 status event code:A-1-2-D10-D22-exm-PE0701 | |
| R18-X000 | Changes to party contact information recorded | St.27 status event code:A-3-3-R10-R18-oth-X000 | |
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment | St.27 status event code:A-2-4-F10-F11-exm-PR0701 | |
| PR1002 | Payment of registration fee | St.27 status event code:A-2-2-U10-U11-oth-PR1002 Fee payment year number:1 | |
| PG1601 | Publication of registration | St.27 status event code:A-4-4-Q10-Q13-nap-PG1601 | |
| FPAY | Annual fee payment | Payment date:20121026 Year of fee payment:4 | |
| PR1001 | Payment of annual fee | St.27 status event code:A-4-4-U10-U11-oth-PR1001 Fee payment year number:4 | |
| LAPS | Lapse due to unpaid annual fee | ||
| PC1903 | Unpaid annual fee | St.27 status event code:A-4-4-U10-U13-oth-PC1903 Not in force date:20131118 Payment event data comment text:Termination Category : DEFAULT_OF_REGISTRATION_FEE | |
| PC1903 | Unpaid annual fee | St.27 status event code:N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text:Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date:20131118 | |
| PN2301 | Change of applicant | St.27 status event code:A-5-5-R10-R13-asn-PN2301 St.27 status event code:A-5-5-R10-R11-asn-PN2301 | |
| P22-X000 | Classification modified | St.27 status event code:A-4-4-P10-P22-nap-X000 | |
| PN2301 | Change of applicant | St.27 status event code:A-5-5-R10-R13-asn-PN2301 St.27 status event code:A-5-5-R10-R11-asn-PN2301 |