KR100827812B1 - Mobile communication location based system and A-PSP location based system and operation method - Google Patents
Mobile communication location based system and A-PSP location based system and operation methodDownload PDFInfo
- Publication number
- KR100827812B1 KR100827812B1KR1020060115045AKR20060115045AKR100827812B1KR 100827812 B1KR100827812 B1KR 100827812B1KR 1020060115045 AKR1020060115045 AKR 1020060115045AKR 20060115045 AKR20060115045 AKR 20060115045AKR 100827812 B1KR100827812 B1KR 100827812B1
- Authority
- KR
- South Korea
- Prior art keywords
- location
- gps
- information
- based system
- aiding information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/01—Satellite radio beacon positioning systems transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/13—Receivers
- G01S19/24—Acquisition or tracking or demodulation of signals transmitted by the system
- G01S19/25—Acquisition or tracking or demodulation of signals transmitted by the system involving aiding data received from a cooperating element, e.g. assisted GPS
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/023—Services making use of location information using mutual or relative location information between multiple location based services [LBS] targets or of distance thresholds
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
Translated fromKoreanDescription
Translated fromKorean도 1 은 GPS 인공위성 수신신호의 레벨별 이용 상태 설명도,1 is a diagram illustrating a state of use of each GPS satellite signal by level;
도 2 는 본 발명에 의한 이동통신 위치기반 시스템의 기능구성도,2 is a functional diagram of a mobile communication location based system according to the present invention;
도 3 은 본 발명에 의한 이동통신 위치기반 시스템의 운용방법 순서도,3 is a flowchart illustrating a method of operating a mobile communication location based system according to the present invention;
도 4 는 본 발명에 의한 이동통신 위치기반 시스템의 신호흐름도,4 is a signal flow diagram of a mobile communication location based system according to the present invention;
도 5 는 본 발명에 의한 A-GPS 위치기반 시스템의 기능 구성도,5 is a functional diagram of an A-GPS location-based system according to the present invention;
도 6 은 본 발명에 의한 A-GPS 위치기반 시스템의 운용방법 순서도,6 is a flowchart illustrating a method for operating an A-GPS location based system according to the present invention;
도 7 은 본 발명에 의한 항법장치의 운용방법 순서도,7 is a flowchart illustrating a method for operating a navigation device according to the present invention;
도 8 은 본 발명에 의한 GPS 신호 수신레벨별 항법장치의 운용방법 설명도.8 is an explanatory diagram of a method of operating a navigation signal for each GPS signal reception level according to the present invention;
** 도면의 주요 부분에 대한 부호 설명 ** ** Explanation of symbols on the main parts of the drawing **
100 : 인공위성110 : 항법장치100: satellite 110: navigation device
120 : 기지국시스템122 : 기지국120: base station system 122: base station
124 : 기지국제어기130 : 이동교환국124: base station controller 130: mobile switching center
140 : A-GPS 위치기반 시스템140: A-GPS location based system
210 : 위치기반서버220 : HLR210: location based server 220: HLR
230 : 위치결정부240 : 위치측정부230: positioning unit 240: position measuring unit
250 : 메시지서버250: message server
본 발명은 항법장치에서 GPS 신호에 의한 현재의 위치정보를 신속하게 확인하는 것으로, 특히, MS-BASED GPS 방식과 STANDALONE GPS 방식의 장점을 결합하여 유지비용을 최소로 하면서 위치정보를 신속하게 연산하는 이동통신 위치기반 시스템 및 A-GPS 위치기반 시스템 및 운용방법에 관한 것이다.The present invention is to quickly check the current position information by the GPS signal in the navigation system, in particular, by combining the advantages of the MS-BASED GPS and STANDALONE GPS method to calculate the position information quickly while minimizing the maintenance cost Mobile communication location based system and A-GPS location based system and method of operation.
위치기반 서비스는, 이동통신 시스템에 등록된 휴대단말기, 피디에이(PDA: Personal Digital Assistant), 이동통신 모듈이 내장된 노트북, 전용 데이터 단말기 등으로 이루어지는 항법장치에 GPS 위치정보와 기지국에 의한 위치정보를 제공하거나, 이러한 위치정보를 다양하게 응용하여 제공하는 부가서비스가 포함된다.The location-based service provides GPS location information and location information by a base station to a navigation device including a mobile terminal registered in a mobile communication system, a personal digital assistant (PDA), a laptop with a mobile communication module, and a dedicated data terminal. Includes additional services that provide or provide various applications of this location information.
이러한 위치기반 서비스는, 네비게이션, 교통정보 제공, 구조요청, 범죄신고, 지역정보 제공(Geographical Information System: GIS), 주 거주지 위치에 의한 이동통신 요금 차등화, 물류 이동상태 관제, CRM(Customer Relationship Management) 등 다양하고 넓은 분야에서 편리함을 각광받고 있다.These location-based services include navigation, traffic information provision, rescue requests, crime reporting, geographic information system (GIS), differential pricing for mobile communication by state of residence, logistics movement status control, and customer relationship management (CRM). It is attracting attention in various and wide fields.
GPS 신호에 의한 정보를 이용하는 위치확인 방식에는 크게, ASSISTED GPS 방식과 STANDALONE GPS 방식이 있으며, ASSISTED GPS 방식에는 다시 MS-ASSISTED GPS 방식과 MS BASED GPS 방식이 있다.The positioning method using information by GPS signal is largely divided into the ASSISTED GPS method and the STANDALONE GPS method, and the ASSISTED GPS method again includes the MS-ASSISTED GPS method and the MS BASED GPS method.
이러한 STANDALONE GPS 방식은, 미 국방성이 관리하고 20,000 Km 상공의 지구궤도를 도는 24개의 GPS 인공위성 중 3개로부터 1.5 GHz 주파수 대역, 2400 내지 4800 bps의 낮은 전송속도에 의한 위성 궤도정보를 수신하여 삼각측량법으로 위도, 경도, 해발의 위치정보를 파악하고, 또 한 개의 위성신호를 추가 수신 및 함께 분석하여 시간정보를 파악하는 방식이다.The STANDALONE GPS method is a triangulation method that receives satellite orbit information at 1.5 GHz frequency band and 2400-4800 bps from 3 out of 24 GPS satellites managed by the US Department of Defense and orbits 20,000 Km. It is to grasp the location information of latitude, longitude, and the sea level, and to analyze time information by further receiving and analyzing another satellite signal.
또한, 오차범위가 수 m 내지 수십 m 정도로 정밀한 장점이 있으나, GPS 기능을 내장하고, 낮은 전송속도의 신호를 수신 복조하여 응용하기까지의 실제 소요시간인 TTFF(TIME TO FIRST FIX)는, 일 실시 예로, 약 1분 이상에서 수십 분의 시간이 소요되는 경우도 있으며, 수신신호가 복조 가능한 레벨이어야 하므로 열악한 무선환경에서 정확도가 떨어진다.In addition, although the error range is accurate to a few m to several tens of meters, TTFF (TIME TO FIRST FIX), which is the actual time required to receive and demodulate and apply a signal having a low transmission rate with a built-in GPS function, is implemented. For example, it may take time from about 1 minute to several tens of minutes, and since the received signal should be at a level capable of demodulation, accuracy is poor in a poor wireless environment.
그러나 이러한 STAND-ALONE 방식은, 단말기 자체적으로 GPS 인공위성의 신호를 처리하므로, 별도의 부가비용이 소요되지 않는 장점이 있다.However, since the STAND-ALONE method processes the signal of the GPS satellite by the terminal itself, there is an advantage that no additional cost is required.
A-GPS(Assisted-GPS) 방식에는 이동통신 시스템 기반 휴대단말기 보조 GPS(MS - Assisted Network-Based GPS)(이하 MS-Assisted GPS) 방식과, 이동통신 시스템 보조 휴대단말기 기반 GPS(MS - Based Network-Assisted GPS)(이하 MS - Based GPS) 방식이 있다.The A-GPS (Assisted-GPS) method includes a mobile communication system-based portable terminal assisted GPS (MS-Assisted GPS) method and a mobile communication system-assisted mobile terminal-based GPS (MS-Based Network). Assisted GPS (MS-Based GPS) method.
MS-Assisted GPS 방식과 MS-Based GPS 방식은, 휴대단말기(MS)의 위치정보를 계산 또는 연산하기 위해 이동통신 시스템의 위치결정 서버로부터 전송되는 보조(Aiding) 데이터를 수신하고, 하나 이상의 GPS 인공위성으로부터 수신된 GPS 신호를 분석하여 위치정보를 연산한다.The MS-Assisted GPS method and the MS-Based GPS method receive aiding data transmitted from a positioning server of a mobile communication system to calculate or calculate location information of a mobile terminal (MS), and at least one GPS satellite. Position information is calculated by analyzing GPS signals received from the system.
이러한 MS-Assisted GPS 방식은, 수신한 GPS 인공위성의 정보를 이동통신 시스템으로 전송하면, 위치결정 서버에서, 기존에 알고 있는 위성들의 산포와 휴대단말기에서 송신한 각 GPS 위성의 정보에 대한 검색결과 값을 바탕으로 최종 위치값을 계산하여 휴대단말기로 전송하는 방식이다.In this MS-Assisted GPS method, when the received GPS satellite information is transmitted to the mobile communication system, the positioning server, the distribution of the known satellites and the search result value for each GPS satellite information transmitted from the mobile terminal Based on this, the final position value is calculated and transmitted to the mobile terminal.
또한, MS-Based GPS 방식은 휴대단말기가 이동통신 시스템으로부터 GPS 인공위성의 보조(Aiding) 데이터 값을 제공받고, 이와 같이 제공받은 보조데이터에 의하여 TTFF 시간이 매우 빠르게 진행되며, 이러한 TTFF에 의하여 지정된 GPS 인공위성으로부터 수신된 GPS 신호를 자체적으로 연산하여, 현재 위치에서의 경도와 위도 및 해발 등에 의한 위치정보를 연산 또는 계산하는 방식이다.In addition, the MS-Based GPS method receives aiding data values of the GPS satellites from the mobile communication system, and the TTFF time progresses very fast according to the provided auxiliary data, and the GPS designated by the TTFF is performed. The GPS signal received from the satellite is calculated by itself to calculate or calculate the position information by the longitude, latitude, and the sea level at the current position.
이러한 보조데이터는 GPS 인공위성을 이용하는 위치확인 방식에서 선행적으로 확보하여야 하는 필수적인 정보이며, GPS 인공위성의 궤도 정보를 표시하는 알마낙(ALMANAC) 정보와, GPS 인공위성의 비행속도 또는 이동속도 정보를 표시하는 이페메리스(EPHEMERS) 정보를 나타내므로, 고정된 위치의 경우, 약 2 시간 내지 3 시간 마다 완전하게 갱신된 값을 필요로 한다.This auxiliary data is essential information that must be secured in advance in the positioning method using GPS satellites, and displays ALMANAC information indicating the GPS satellite's orbit information, and displays the GPS satellite's flight speed or moving speed information. Since the EPHEMERS information is shown, a fixed position requires a fully updated value every two to three hours.
도 1을 참조하면, GPS 인공위성으로부터 휴대단말기가 무선 수신하는 GPS 신호는 시간에 따라 변화하는 수신레벨로 표시할 수 있다.Referring to FIG. 1, a GPS signal wirelessly received by a mobile terminal from a GPS satellite may be displayed at a reception level that changes with time.
휴대단말기에 의하여, GPS 인공위성으로부터 D-레벨(복조레벨) 이상의 신호를 초기에 수신하여야만, S-레벨(서치레벨)의 신호를 이용하여 위치정보를 계산할 수 있다.The mobile terminal must first receive a signal equal to or higher than the D-level (demodulation level) from the GPS satellite, so that the position information can be calculated using the S-level (search level) signal.
S-레벨 이상으로 수신되는 신호는, GPS 인공위성의 위치를 검색(SEARCH)하게 되고, 이러한 S-레벨의 신호를 이용하여 위도, 경도, 해발 및 시간 등의 정보를 계산하는데 사용된다.The signal received at the S-level or more is SEARCH the position of the GPS satellite, and is used to calculate information such as latitude, longitude, elevation and time using the S-level signal.
D-레벨 이상으로 수신되는 GPS 인공위성의 신호는, 복조(DEMODULATION)하여 인공위성의 타원 궤도정보인 알마낙(ALMANAC) 정보와, 이동속도 정보인 이페메리스(EPHEMERS)를 분석하는데 사용된다.A GPS satellite signal received at a D-level or more is demodulated and used to analyze ALMANAC information, which is satellite elliptic orbit information, and EPHEMERS, which is moving speed information.
이러한, 알마낙 정보는 타원형 궤도 정보이므로, 큰 변화가 발생하지 않아, 평균 약 3 개월 주기로 갱신하면 되지만, 이페메리스 정보는, 궤도를 따라 회전하는 이동속도 정보이므로, 지속적인 추적(TRACE)을 위하여 2 시간 내지 3 시간마다 갱신하여야 하고, 이러한 정보에는 도플러 쉬프트(DOPPLER SHIFT) 정보 등이 포함된다.Since the almanac information is elliptical orbital information, no significant change occurs, and the average information is updated every three months. However, the ephemeris information is a moving speed information that rotates along the orbit. It must be updated every two to three hours, and such information includes Doppler Shift information and the like.
따라서 GPS 인공위성으로부터 도플러 쉬프트에 의하여 발생하는 편이를 보정하기 위하여, D-레벨의 신호를 설정된 소정 시간 마다 갱신하여 수신하여야 하고, 이러한 D-레벨의 데이터를 보조(Aiding) 데이터라고 한다.Therefore, in order to correct the deviation caused by the Doppler shift from the GPS satellite, the D-level signal must be updated and received at each predetermined time, and this D-level data is called aiding data.
이와 같이 GPS 인공위성으로부터 낮은 데이터 전송속도에 의한 D-레벨의 데이터 신호를 수신하여 복조하고, 응용할 수 있을 정도로 분석할 때까지의 TTFF 시간이 비교적 많이 소요되는 문제가 있다.As described above, there is a problem in that TTFF time is required to receive and demodulate a D-level data signal at a low data rate from a GPS satellite and analyze the data to be applicable.
특히, 자원이 제한되는 휴대단말기에서 네트워크 접속 부하(LOAD)가 증가하는 등의 어려움이 있다.In particular, there is a difficulty in increasing a network connection load (LOAD) in a mobile terminal with limited resources.
그러므로 휴대단말기의 운용방식에 따라 약간씩의 차이가 있으나, 설정된 소정의 주기시간 단위로, GPS 인공위성의 보조데이터 값을 이동통신 시스템으로부터 제공받을 필요가 있다.Therefore, although there is a slight difference depending on the operation method of the portable terminal, it is necessary to receive the auxiliary data value of the GPS satellites from the mobile communication system on a predetermined predetermined cycle time unit.
이와 같이 이동통신 시스템으로부터 제공받는 보조데이터는 TTFF 시간을 최소로 줄이는 장점이 있으나, 이동통신 시스템에 접속하는데 따른 통신비용이 발생하는 문제가 있다.As described above, the auxiliary data provided from the mobile communication system has an advantage of reducing the TTFF time to a minimum, but there is a problem in that a communication cost is generated in connection with the mobile communication system.
이와 같이 주기적으로 시스템에 접속하여 보조데이터를 제공받는 방식이 MS-Based GPS 방식이다.As such, the MS-Based GPS method is used to periodically access the system and receive auxiliary data.
또한, 휴대단말기에 전자지도가 내장되고, 갱신된 지도정보가 필요한 경우, 이동통신 시스템의 해당 서버에 접속하여 선택적으로 다운로드 받을 수 있으며, 전자지도가 내장되지 않은 경우에는 위치에 따라 필요한 전자지도 정보를 수시로 다운로드 받을 수 있다.In addition, when an electronic map is embedded in the portable terminal and updated map information is required, the electronic map information may be selectively downloaded by connecting to a corresponding server of the mobile communication system. You can download it from time to time.
이러한 위치 기반 서비스 중, 휴대단말기 또는 PDA의 현재 위치에서 목적지까지 최단거리를 측정하는 모바일 텔레매틱스 기술을 적용하여, 이동 중인 차량의 현재 위치 정보를 2차원 또는 3차원 지도 그래픽 형태로 제공하는 네비게이션(Navigation)의 항법장치가 응용기술로 최근 주목을 받고 있다.Among these location-based services, by applying the mobile telematics technology that measures the shortest distance from the current location of the mobile terminal or PDA to the destination, navigation to provide the current location information of the moving vehicle in the form of two-dimensional or three-dimensional map graphics ) Navigation system is attracting attention recently as an application technology.
따라서 STANDALONE GPS 방식의 이동통신 시스템을 의존하지 않는 장점과, MS-BASED GPS 방식의 인공위성 수신감도가 좋고, 위치정보를 신속하게 계산하는 장 점을 결합하여, 위치정보 계산의 정밀도와 신속성을 높이는 기술을 개발할 필요가 있다.Therefore, this technology combines the advantages of not relying on the STANDALONE GPS mobile communication system and the advantages of MS-BASED GPS satellite receiving sensitivity, and the advantage of calculating location information quickly, thereby improving the accuracy and speed of location calculation. Needs to be developed.
본 발명은, GPS 기능을 구비한 항법장치의 위치정보 확인에 소요되는 운용비용을 최소로 하고, TTFF를 줄이어 위치정보를 신속하게 확인하는 것으로, 특히, MS BASED GPS 모드(이하, MS 모드)와 STANDALONE GPS 모드(이하, STANDALONE 모드)를 유연하게 연동하여 적은 비용으로 정확한 위치정보 확인으로 측위 서비스의 품질을 개선하는 이동통신 위치기반 시스템 및 A-GPS 위치기반 시스템 및 운용방법을 제공하는 것이 그 목적이다.The present invention is to minimize the operating cost required to confirm the location information of a navigation device having a GPS function, and to reduce the TTFF to quickly confirm the location information. In particular, the MS BASED GPS mode (hereinafter referred to as MS mode) And STANDALONE GPS mode (hereinafter referred to as STANDALONE mode) to provide mobile communication location based system and A-GPS location based system and operation method which improves the quality of positioning service by checking accurate location information at low cost. Purpose.
상기와 같은 목적을 달성하기 위하여 안출한 본 발명은, 운용초기에 MS 모드를 구동하여 접속된 A-GPS 위치기반 시스템에 AIDING 정보를 요청하여 제공받고 STANDALONE 모드로 전환 구동되어 GPS 인공위성으로부터 GPS 신호를 수신하며 위치정보를 연산하여 응용하는 항법장치; 항법장치와 무선 접속되고 이동교환국으로부터 제공되는 AIDING 정보를 전송하는 기지국 시스템; 무선 접속된 항법장치의 요청에 의하여 경로를 설정하고 A-GPS 시스템으로부터 복조되어 제공되는 AIDING 정보를 전달하는 이동교환국; 항법장치의 요청에 의하여 무선접속된 기지국 위치정보에 의한 GPS 인공위성 AIDING 정보를 복조하여 제공하는 A-GPS 위치기반 시스템; 항법장치에 위치정보를 연산할 수 있는 GPS 신호를 제공하는 GPS 인공위성; 이 포함되 는 구성을 제시한다.In order to achieve the above object, the present invention provides a request for AIDING information to an A-GPS location-based system connected to the MS mode at the beginning of operation, and switches to the STANDALONE mode to drive GPS signals from the GPS satellites. A navigation device for receiving and calculating location information; A base station system wirelessly connected to the navigation apparatus and transmitting AIDING information provided from the mobile switching center; A mobile switching station that sets a path at the request of a wirelessly connected navigation apparatus and delivers AIDING information that is demodulated and provided from an A-GPS system; An A-GPS location-based system for demodulating and providing GPS satellite AIDING information according to base station location information wirelessly connected at the request of a navigation device; A GPS satellite providing a GPS signal capable of calculating position information to the navigation device; This configuration is included.
또한, 상기와 같은 목적을 달성하기 위하여 안출한 본 발명은, 이동교환국에 의하여 항법장치로부터 AIDING 정보 요청이 있는 것으로 확인되면 A-GPS 위치기반 시스템과의 경로를 설정하는 과정; A-GPS 위치기반 시스템에 의하여 항법장치가 무선 접속한 기지국의 정보를 검색하는 과정; 검색된 기지국 위치에서 무선 수신되는 GPS 인공위성의 신호로부터 AIDING 정보를 복조하고, 이동교환국을 통하여 항법장치에 제공하는 과정; 이 포함되는 구성을 제시한다.In addition, the present invention has been made in order to achieve the above object, if the mobile switching station determines that the AIDING information request from the navigation device to establish a path with the A-GPS location-based system; Retrieving information of the base station to which the navigation apparatus is wirelessly connected by the A-GPS location-based system; Demodulating AIDING information from a GPS satellite signal wirelessly received at the retrieved base station location and providing the navigation device to the navigation apparatus through the mobile switching center; This presents the included configuration.
또한, 상기와 같은 목적을 달성하기 위하여 안출한 본 발명은, 항법장치로부터 AIDING 정보 제공요청을 받고, 접속된 기지국 위치에서의 AIDING 정보를 복조하여 항법장치에 제공되도록 제어하고 감시하는 위치기반서버; 위치기반서버의 제어에 의하여 항법장치가 무선 접속한 기지국의 정보를 검색하여 제공하는 HLR 서버; 위치기반서버의 제어에 의하여 선택된 기지국 위치에서 GPS 인공위성의 AIDING 정보를 복조하여 제공하는 위치측정부; 가 포함되는 구성을 제시한다.In addition, the present invention has been made in order to achieve the above object, the location-based server receives a request for providing AIDING information from the navigation device, controls and monitors the demodulation of the AIDING information at the connected base station location to be provided to the navigation device; An HLR server for retrieving and providing information of a base station to which a navigation apparatus is wirelessly connected by control of a location based server; A location measuring unit for demodulating and providing the AIDING information of the GPS satellites at the location of the base station selected by the control of the location based server; Present a configuration that includes.
또한, 상기와 같은 목적을 달성하기 위하여 안출한 본 발명은, 위치기반서버에 의하여 항법장치가 접속되고 AIDING 정보를 요청하는 것으로 확인되면 HLR 서버를 제어하여 항법장치가 무선 접속한 기지국의 정보를 확인하는 과정; 확인된 기지국에서 수신되는 GPS 인공위성의 AIDING 정보를 복조하는 과정; 검색된 AIDING 정 보를 항법장치에 전달하는 과정; 이 포함되는 구성을 제시한다.In addition, the present invention devised to achieve the above object, if it is confirmed that the navigation apparatus is connected by the location-based server to request the AIDING information, and controls the HLR server to check the information of the base station that the navigation apparatus is wirelessly connected Process of doing; Demodulating AIDING information of a GPS satellite received at the identified base station; Transmitting the retrieved AIDING information to the navigation system; This presents the included configuration.
또한, 상기와 같은 목적을 달성하기 위하여 안출한 본 발명은, 항법장치에 의하여 GPS 신호를 응용하는 경우 이동통신 시스템을 통하여 A-GPS 위치기반 시스템에 접속하는 과정; A-GPS 위치기반 시스템에 AIDING 정보를 요청하고 제공된 AIDING 정보에 의한 GPS 인공위성으로부터 위치정보를 연산할 수 있는 서치레벨 신호를 수신하는 과정; 수신된 서치레벨 신호를 분석하여 위치정보를 연산하고 응용처리하며, 설정된 시간이 되면 GPS 신호를 분석하여 AIDING 정보를 복조하는 복조레벨 신호를 확인하는 과정; AIDING 정보가 검출되면 서치레벨 신호를 수신하여 응용 처리하는 과정을 반복하는 과정; 이 포함되는 구성을 제시한다.In addition, the present invention devised to achieve the above object, the process of accessing the A-GPS location-based system through the mobile communication system when applying the GPS signal by the navigation device; Requesting AIDING information from an A-GPS location-based system and receiving a search level signal capable of calculating location information from a GPS satellite based on the provided AIDING information; Analyzing the received search level signal to calculate and apply location information, and checking a demodulation level signal for demodulating AIDING information by analyzing a GPS signal at a set time; Repeating a process of receiving and applying a search level signal when AIDING information is detected; This presents the included configuration.
이하, 본 발명에 의한 이동통신 위치기반 시스템 및 A-GPS 위치기반 시스템 및 운용방법을 첨부된 도면을 참조하여 설명한다.Hereinafter, a mobile communication location based system and an A-GPS location based system and an operation method according to the present invention will be described with reference to the accompanying drawings.
본 발명을 설명하기 위하여 첨부된 것으로, 도 2 는 본 발명에 의한 이동통신 위치기반 시스템의 기능구성도 이며, 도 3 은 본 발명에 의한 이동통신 위치기반 시스템의 운용방법 순서도 이고, 도 4 는 본 발명에 의한 이동통신 위치기반 시스템의 신호흐름도 이며, 도 5 는 본 발명에 의한 A-GPS 위치기반 시스템의 기능 구성도 이며, 도 6 은 본 발명에 의한 A-GPS 위치기반 시스템의 운용방법 순서도 이며, 도 7 은 본 발명에 의한 항법장치의 운용방법 순서도 이고, 도 8 은 본 발명 에 의한 GPS 신호 수신레벨별 항법장치의 운용방법 설명도이다.2 is a functional configuration diagram of a mobile communication location based system according to the present invention, FIG. 3 is a flowchart illustrating a method of operating a mobile communication location based system according to the present invention, and FIG. Signal flow diagram of a mobile communication location-based system according to the invention, Figure 5 is a functional configuration diagram of the A-GPS location-based system according to the present invention, Figure 6 is a flow chart of the operation method of the A-GPS location-based system according to the present invention. 7 is a flowchart illustrating a method of operating a navigation device according to the present invention, and FIG. 8 is a diagram illustrating a method of operating a navigation device for each GPS signal reception level according to the present invention.
본 발명의 실시 예를 설명함에 있어서, 본 발명과 직접적으로 관련 없고, 잘 알려져 있는 기술 내용에 대하여서는 설명을 생략하므로, 본 발명의 요지를 흐르지 않고 명확하게 전달한다.In describing the embodiments of the present invention, descriptions are omitted for technical contents that are not directly related to the present invention and are well known, and thus, the present invention is clearly transmitted without passing the gist of the present invention.
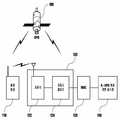
도 2 를 참조하여, 본 발명에 의한 이동통신 위치기반 시스템을 설명하면, 항법장치에 위치정보를 연산할 수 있는 GPS 신호를 제공하는 GPS 인공위성(100); 이동통신용 휴대단말기, PDA, 노트북, 데이터 단말기 등으로 이루어지고 이동하면서 위치정보를 응용하여 다양한 서비스를 제공하는 것으로, 운행 초기에 MS 모드로 운용되어 확인된 AIDING 정보에 의하여 GPS 신호를 수신하고 STANDALONE 모드로 전환 운용되어 위치정보를 연산하여 다양하게 응용하는 항법장치(110); 항법장치와 무선접속하고 AIDING 정보 요청 신호와 AIDING 정보를 전달하는 기지국 시스템(120); 항법장치와 A-GPS 위치기반 시스템과의 통신경로를 설정하고 AIDING 정보를 전달하는 이동교환국(130); 항법장치의 요청에 의하여 기지국에서의 AIDING 정보를 복조하여 제공하는 A-GPS 위치기반 시스템(140); 을 포함하는 구성이다.Referring to Figure 2, when describing the mobile communication location based system according to the present invention, the
도 3을 참조하여, 본 발명에 의한 이동통신 위치기반 시스템의 운용방법을 설명하면, 이동교환국에 의하여 항법장치가 AIDING 정보를 요청하면 A-GPS 시스템과의 경로를 설정하는 과정; 항법장치가 무선 접속한 기지국 정보를 검색하는 과정; 검색된 기지국에서의 복조된 AIDING 정보를 항법장치에 제공하는 과정; 을 포 함하여 구성된다.Referring to Figure 3, when explaining the operation method of the mobile communication location-based system according to the present invention, the process of setting a path with the A-GPS system when the navigation device requests AIDING information by the mobile switching center; Retrieving base station information wirelessly accessed by the navigation apparatus; Providing demodulated AIDING information at the retrieved base station to the navigation apparatus; It is configured to include.
도 2와 도 3을 참조하여, 본 발명에 의한 것으로, 이동통신 위치기반 시스템 및 그 운용방법을 설명하면, GPS 인공위성(100)은, 지구상 약 20,000 Km 상공에서 일정한 타원형 궤도인 알마낙(ALMANAC)을 일정한 이동속도인 이페메리스(EPHEMERS)로 회전하는 것으로, 약 24개가 존재하며, 미국의 국방성에서 관리한다.Referring to FIGS. 2 and 3, according to the present invention, a mobile communication location-based system and an operation method thereof will be described. The
이러한 GPS 인공위성(100)으로부터 수신되는 GPS 신호가 D-레벨 또는 복조레벨 이상으로 수신되는 경우, 수신된 신호를 복조(DEMODULATION)하므로, GPS 인공위성(100)의 타원형 궤도정보인 알마낙 정보와, 이동속도 정보인 이페메리스 정보로 이루어지는 AIDING 정보를 복조하고, S-레벨 또는 서치(SEARCH) 레벨 이상으로 수신되는 경우, 수신된 서치정보 신호를 분석 및 연산하여, 경도, 위도, 해발 및 시간에 의한 위치정보를 확인한다.When the GPS signal received from the
항법장치(110)는 이동에 적합하게 소형이므로, 구비된 자원이 한정되며, 일 실시 예로, 연산 능력, 메모리의 크기, 무선신호 수신능력 등이 제한된다.Since the
또한, GPS 인공위성으로부터 무선 수신되는 것으로, AIDING 정보와 서치정보가 포함되는 GPS 신호는, 2400 bps 내지 4800 bps의 낮은 전송속도이다.In addition, the GPS signal, which is wirelessly received from the GPS satellites and includes the AIDING information and the search information, has a low transmission speed of 2400 bps to 4800 bps.
자원이 제한적인 항법장치(110)에서, STANDALONE 방식으로, GPS 신호의 D-레벨 신호를 수신하여 복조하고 분석 처리하여 궤도정보와 속도정보를 검출하기 위하여서는, 일반적으로, 운행 초기에 약 1 분 내지 수십 분의 시간이 소요되고, 반복 갱신하는 경우는 비교적 적게 소요된다.In the resource-limited
그리고 GPS 인공위성은 정해진 타원형 궤도를 일정한 공전속도로 회전하므로, 약 2 시간 내지 3 시간 마다 위치를 확인하여야 하며, 이러한 위치확인에 필요한 신호가 D-레벨 신호이다.In addition, since the GPS satellite rotates a predetermined elliptical orbit at a constant revolution speed, the position of the GPS satellite should be checked every two to three hours, and a signal necessary for such positioning is a D-level signal.
또한, D-레벨의 신호는 수신되지 않고, S-레벨의 신호가 수신되는 상태에서, D-레벨의 신호만 외부로부터 제공받는 경우, S-레벨의 신호만으로도 위치정보를 연산할 수 있다.In addition, when the D-level signal is not received and only the D-level signal is provided from the outside in the state where the S-level signal is received, the position information can be calculated using only the S-level signal.
그러므로 초기에 GPS 인공위성의 위치 및 궤적의 정보를 확보하기 위하여 D-레벨의 신호를 수신하고 복조 분석 처리하는데, 약 1 분 내지 수십 분의 시간을 필요로 하고, 이후의 2 시간 내지 3 시간 마다 반복하여 갱신하는 경우에는, 이미 GPS 인공위성의 위치 및 궤적을 추적(TRACE)하고 있으므로 이보다는 작은 시간이 소요되지만, 여전히 긴 시간이 소요된다.Therefore, in order to initially receive the position and trajectory information of the GPS satellites, the signal of the D-level is received and demodulated and analyzed, which takes about 1 to 10 minutes, and repeats every 2 to 3 hours thereafter. In the case of updating by using the GPS satellite, since the position and trajectory of the GPS satellite is already tracked (TRACE), it takes less time, but still takes a long time.
따라서 본 발명은 항법장치가 GPS 신호를 분석하여 위치정보를 연산하고 출력하기 위한 것으로, AIDING 정보를 복조하고 분석하는데 소요되는 TTFF 시간을 줄이는 동시에 AIDING 정보 수신에 따른 네트워크 접속 부하를 최소화하기 위한 기술이다.Accordingly, the present invention is for the navigation device to calculate and output the location information by analyzing the GPS signal, and to reduce the TTFF time required to demodulate and analyze the AIDING information, and at the same time to minimize the network connection load due to receiving the AIDING information. .
일 실시 예로, 이러한 항법장치(110)가 GPS 인공위성(100)으로부터 수신되는 GPS 신호를 이용하여 네비게이션 등에 응용하고자 하는 경우, AIDING 정보를 확보하기 위하여, 초기에 MS 모드를 설정하고, A-GPS 위치기반 시스템(140)과의 호접속을 요청한다.In one embodiment, when the
항법장치(110)의 호접속 요청신호는, 기지국시스템(120)을 구성하는 기지국(122)에서 무선 수신되고, 기지국 제어기(124)를 통하여 이동교환국(130)에 제공되며, 이동교환국(130)에 의하여 스위칭 설정된 통신경로를 통하여 A-GPS 위치기반 시스템과 접속된다.The call connection request signal of the
A-GPS 위치기반 시스템(140)은, 우선적으로 항법장치(110)가 무선 접속한 기지국(122)의 위치정보를 HLR(HOME LOCATION REGISTER) 서버 검색을 통하여 확인한다.The A-GPS location-based
항법장치(110)는 한정된 자원을 보유하고, 이동 상태이므로, 현재 위치에서의 GPS 신호를 제공하는 GPS 인공위성(100)에 대한 정보가 수시로 변한다.Since the
그러나 기지국(122)을 포함하는 A-GPS 위치기반 시스템(140)은, 지정된 장소에 고정 배치되고, 자원을 필요한 만큼 보유 또는 구비할 수 있으며, 해당 장소에서 시간 대 별로 GPS 신호를 최적 상태로 수신할 수 있는 GPS 인공위성(100)이 일정하므로, 이러한 정보를 별도 집중 관리할 수 있다.However, the A-GPS location-based
A-GPS 위치기반 시스템(140)은 항법장치(110)가 무선 접속한 기지국(122)의 정보를 확인하고, 이와 같이 확인된 기지국(122) 위치에서 현재 시각에 최적상태로 GPS 신호를 수신할 수 있는 GPS 인공위성(100)의 정보, 즉, 복조된 AIDING 정보를 항법장치(110)에 제공한다.The A-GPS location-based
이와 같이 복조된 AIDING 정보는, GPS 인공위성(100)으로부터 수신되는 D-레벨의 정보를 복조한 것으로, 타원형 궤도정보의 알마낙(ALMANAC) 정보와 이동속도 정보인 이페메리스(EPHENERS) 정보이다.The demodulated AIDING information is demodulated from the D-level information received from the
또한, 다른 일실시 예로, 고정된 기지국 위치에서 복조된 AIDING 정보는 동일하고, 다만 시간대에 따라 차이가 있으므로, 사전에 시간대 별로 D-레벨 신호를 수신하여 복조한 AIDING 정보를 기록하여 관리하고, 요청에 의하여 검색 및 제공할 수 있다.Further, in another embodiment, since the demodulated AIDING information at the fixed base station location is the same, but differs according to time zones, the demodulated AIDING information is recorded and managed by receiving a D-level signal for each time zone in advance, and requesting Search and provide.
이러한 AIDING 정보를 제공받은 항법장치(110)는, 최적상태로 S-레벨의 신호를 수신할 수 있는 GPS 인공위성(100)의 정보를 제공받게 되며, 이와 같은 운용방식이 MS 모드로 운용되는 방식이다.The
항법장치(110)는 AIDING 정보를 확보하기 위하여 MS 모드로 운용되고, AIDING 정보를 확보한 후에는, STANDALONE 모드로 운용된다.The
또한, STANDALONE 모드로 운용되는 상태에서 GPS 인공위성으로부터 자체적으로 AIDING 정보를 복조 할 수 없게 되면, 다시 MS 모드로 전환 운용되어 AIDING 정보를 확보하고 나서 STANDALONE 모드로 전환 운용된다.In addition, if the AIDING information cannot be demodulated by the GPS satellites in the STANDALONE mode, it is switched to the MS mode again to secure the AIDING information and then to the STANDALONE mode.
즉, 항법장치(110)가 운행 초기에 MS 모드로 운용되어, A-GPS 위치기반 시스템(140)으로부터 AIDING 복조 정보를 신속하게 제공 받고 STANDALONE 모드로 전환 운용되어, 자체적으로 AIDING 정보를 복조하므로, A-GPS 위치기반 시스템을 포함하는 네트워크의 부하를 줄이고, 자체적으로 AIDING 정보를 복조하지 못하는 경우에는, 다시 MS 모드로 전환 운용되어 A-GPS 위치기반 시스템(140)으로부터 AIDING 복조 정보를 신속하게 제공 받으므로, 전체적으로 시스템의 부하를 줄이면서 GPS 위치정보를 신속하게 제공하여 서비스의 품질을 높이게 된다.That is, since the
이와 같은 운용방식을 순서에 의하여 설명하면, 이동교환국(130)에 의한 것 으로, 항법장치(110)로부터 기지국시스템(120)을 통하여 접속하고, 호접속 요청신호가 입력되는 경우, A-GPS 위치기반 시스템과의 호접속으로 AIDING 정보를 요청하는 것인지를 확인한다(S100).When the operation method is described in order, the
이러한 확인에서 AIDING 정보 요청으로 확인되면, 이동교환국(130)은 스위칭으로 A-GPS 위치기반 시스템(140)과의 경로를 설정한다(S110).If it is confirmed as the AIDING information request in this confirmation, the
A-GPS 위치기반 시스템(140)은 HLR 서버 검색으로, AIDING 정보 요청 항법장치(110)가 무선 접속한 기지국(122)의 정보를 확인한다(S120).The A-GPS location-based
이러한 A-GPS 위치기반 시스템(140)은, 확인된 기지국(122)의 위치에서 최적상태로 GPS 신호를 수신할 수 있는 것으로, GPS 인공위성(100)으로부터 수신된 D-레벨 신호를 복조하여 AIDING 정보를 검출한다(S130).The A-GPS location-based
기지국(122)이 고정되어 있고, GPS 인공위성(100)의 타원형 궤도와 이동속도가 고정되어 있으므로, 특정한 기지국(122) 위치에서, 지정된 시각에 GPS 신호를 수신할 수 있는 GPS 인공위성(100)의 정보는 일정하게 된다.Since the
그러므로 A-GPS 위치기반 시스템(140)은, 각 기지국(122) 위치에서의 지정된 시각에 복조된 AIDING 정보를 미리 기록하여 관리하고 검색하여 제공할 수 있다.Therefore, the A-GPS location-based
또는, 처리 기능이 뛰어난 자원을 필요한 만큼 확보 또는 구비할 수 있으므로, 요청받는 즉시, AIDING 정보를 신속하게 복조하여 제공할 수 있다.Alternatively, since resources having excellent processing functions can be secured or provided as necessary, immediately upon request, AIDING information can be demodulated and provided.
이와 같이 확인된 기지국(122) 위치에서 복조된 AIDING 정보는, 이동교환국(130)과 기지국 시스템(120)을 통하여 항법장치(110)에 제공된다(S140).The AIDING information demodulated at the
즉, 항법장치(110)는 MS 모드를 운용하여 복조된 AIDING 정보를 확보하고 나 서, STANDALONE 모드로 전환 운용되며, GPS 인공위성(100)으로부터 직접 수신되는 S-레벨의 신호를 이용하므로, 위치정보를 신속하게 연산하고 응용할 수 있다.That is, the
이러한 위치정보는, 최소 3 개 이상의 GPS 인공위성(100)으로부터 수신되는 S-레벨의 신호를 분석하므로, 정확한 위치정보의 x, y 값을 연산하게 된다.Since the location information analyzes signals of S-levels received from at least three or
이와 같이 STANDALONE 모드로 운용되는 항법장치(110)는, 설정된 소정 주기 시간 단위로 AIDING 정보가 GPS 인공위성으로부터 직접 자체 수신하는 과정을 반복하지만, 자체 수신되지 않는 경우는, MS 모드로 전환되어 A-GPS 위치기반 시스템(140)에 접속하므로, 복조된 AIDING 정보 확보 과정을 반복한다.As described above, the
도 4를 참조하여, 이동통신 위치기반 시스템의 신호흐름을 설명하면, 항법장치(110)에 의하여 이동교환국(130)에 AIDING 정보를 요청하는 경우(ST100), 이동교환국(130)의 스위칭에 의하여 설정된 통신경로로 A-GPS 위치기반 시스템(140)에 AIDING 정보 요청 신호를 전달한다(ST110).Referring to Figure 4, when describing the signal flow of the mobile communication location-based system, when the
이러한 A-GPS 위치기반 시스템(140)은, HLR 서버를 제어하므로, 항법장치(110)가 무선 접속한 기지국(122)의 정보를 검색 및 확인하고(ST120), 이와 같이 확인된 기지국 위치에서 GPS 인공위성으로부터 수신되는 D-레벨 신호를 복조하여 AIDING 정보를 확인한다(ST130).Since the A-GPS location-based
이와 같은 AIDING 정보의 복조는, A-GPS 위치기반 시스템(140)에 구비되는 풍부한 자원을 이용하므로 GPS 인공위성으로부터 수신되는 D-레벨 신호를 신속하게 복조하는 방식과, 사전에 시간대 별로 복조하여 데이터베이스화로 기록 및 관리하는 AIDING 정보를 검색하여 제공하는 방식이 포함된다.Since the demodulation of the AIDING information utilizes abundant resources provided in the A-GPS location-based
A-GPS 위치기반 시스템(140)은, 이와 같이 복조되거나 검색된 AIDING 정보를 이동교환국(130)에 제공하고(ST140), 이동교환국(130)은 기지국 시스템(120)을 통하여 항법장치(110)에 전달한다(ST150).The A-GPS location-based
이러한 항법장치(110)는, AIDING 정보를 이용하여, 24 개의 GPS 인공위성(100) 중, 지정된 GPS 인공위성(100)으로부터 S-레벨 GPS 신호를 수신하고(ST160), 수신된 S-레벨의 GPS 신호를 자체 분석하여 위치정보를 연산 및 네비게이션 등등에 응용한다(ST170).The
이와 같은 항법장치(110)는, 복조된 AIDING 정보를 갱신할 시간, 즉, 설정된 소정 시간이 계수(COUNT) 되었는지 확인한다(ST180).The
이러한 확인에서, 설정된 시간이 계수 되었으면, 복조된 AIDING 정보를 요청하는 과정(ST100)으로 궤환하며, 설정된 시간이 계수되지 않은 경우는, S-레벨의 신호를 수신하여 위치정보를 연산 및 응용하는 과정을 반복한다.In this confirmation, if the set time is counted, the process returns to the process of requesting demodulated AIDING information (ST100). If the set time is not counted, a process of receiving and receiving a S-level signal and calculating and applying location information is performed. Repeat.
선택적인 사항으로, 항법장치의 운용방식에 따라서, 설정된 소정 시간이 계수되고, GPS 인공위성(100)으로부터 AIDING 정보를 복조할 수 있는 D-레벨의 신호가 수신되는 경우, 이동교환국에 접속하여 복조된 AIDING 정보를 요청하지 않을 수도 있다.Optionally, according to the navigation system operation method, the predetermined time set is counted, and when a D-level signal capable of demodulating AIDING information is received from the
도 5를 참조하여, 본 발명에 의한 A-GPS 위치기반 시스템(140)을 설명하면, 항법장치(110)의 요청에 의하여 접속된 기지국(122) 위치를 확인하고 AIDING 정보 복조 또는 검색하여 제공하도록 제어하며 감시하는 위치기반서버(LOCATION BASED SERVICE PLATFORM : LBSP)(210); 다수 기지국(122)의 위치정보와 항법장치(110)가 무선 접속된 기지국(122)의 정보를 제공하는 HLR(HOME LOCATION REGISTER) 서버(220); 위치기반 서버의 제어에 의하여 측정된 위치정보로 최종 위치를 결정하는 위치결정부(MOBILE POSITIONING CENTER : MPC)(230); 위치기반 서버의 제어에 의하여 항법장치의 위치를 측정하는 동시에 각 기지국에서의 최적 AIDING 정보를 복조 또는 검색하여 제공하는 위치측정부(POSITION DETERMINATION EQUIPMENT : PDE)(240); 위치기반서버의 제어에 의하여 복조된 AIDING 정보를 문자메시지 정보로 변환하여 제공하는 메시지서버(250); 를 포함하는 구성이다.Referring to FIG. 5, when describing the A-GPS location-based
도 6 을 참조하여, 본 발명에 의한 A-GPS 위치기반 시스템(140)의 운용방법을 설명하면, 위치기반 서버(210)에 의하여 항법장치(110)의 AIDING 정보 요청이 있는 것으로 확인되면, HLR 서버(220)를 제어하여 항법장치(110)가 무선 접속된 기지국(122) 정보를 확인하는 과정; 확인된 기지국(122)에서 수신되는 GPS 인공위성(100)의 AIDING 정보를 복조 또는 검색하는 과정; 복조 또는 검색된 AIDING 정보를 항법장치에 전달하는 과정; 을 포함하는 구성이다.Referring to Figure 6, when describing the operation method of the A-GPS location-based
도 7 을 참조하여, 본 발명에 의한 항법장치의 운용방법을 설명하면, 항법장치(110)에 의하여 GPS 신호를 이용하고 응용하고자 하는 경우, 이동통신 시스템을 통하여 A-GPS 위치기반 시스템에 접속하는 과정; 접속된 A-GPS 위치기반 시스템에 요청하여 복조된 AIDING 정보로 GPS 인공위성의 서치레벨 신호를 수신하는 과정; 수신된 서치레벨 신호를 분석하여 위치정보를 연산하고 응용처리하며, 설정된 시간이 되면 GPS 인공위성으로부터 AIDING 정보를 복조할 D-레벨 신호가 포함되는지 확인하는 과정; GPS 인공위성으로부터 AIDING 정보를 복조할 D-레벨 신호가 포함되는 것으로 확인되면, 서치정보를 수신하여 응용을 완료할 때까지 반복하는 과정; 을 포함하는 구성이다.Referring to FIG. 7, a method of operating a navigation device according to the present invention will be described. When a GPS signal is used and applied by the
A-GPS 위치기반 시스템(140)은, 위치기반서버(210), HLR 서버(220), 위치결정부(230), 위치측정부(240), 메시지서버(250)를 포함하여 구성된다.The A-GPS location based
위치기반서버(210)는, A-GPS 위치기반 시스템(140)의 전체 운용을 제어하며, 항법장치(110)로부터 AIDING 정보 제공 요청이 있으면, HLR 서버(220)를 제어하여, 항법장치(110)가 무선 접속된 기지국(122)의 정보를 확인한다.The location-based
이와 같이 확인된 기지국(122)의 정보를 분석하여 위치정보를 검출하고, 검출된 위치정보를 위치측정부(240)에 제공한다.The location information is detected by analyzing the information of the
위치기반서버(210)는, 위치측정부(240)를 제어하여, 기지국(122)의 검출된 위치정보에서 GPS 인공위성(100)으로부터 최적상태로 수신된 D-레벨의 신호를 복조한 AIDING 정보를 확인한다.The location-based
이러한 위치측정부(240)는 GPS 인공위성(100)으로부터 수신되는 D-레벨의 신호를, 구비된 풍부한 자원을 이용하여 복조하므로, AIDING 정보를 신속하게 복조하 여 제공할 수 있다.Since the
또한, 다른 일예로, 기지국(122)의 위치는 고정되고, 해당 위치에서 GPS 신호를 최적 상태로 수신할 수 있는 GPS 인공위성의 정보 역시 고정되므로, 데이터베이스로 미리 기록 관리하고, 검색하여 제공할 수 있다.Further, as another example, since the location of the
또한, 선택에 의하여 AIDING 정보를 메시지서버(250)에 제공하여 문자메시지 포맷에 의한 데이터로 전송한다.In addition, AIDING information is provided to the
문자메시지로 전송하지 않는 경우는, 이동교환국에 전송하여, WCDMA 방식의 패킷 데이터로 전송하며, 이러한 경우는 항법장치(110)가 기지국(122)과 WCDMA 방식으로 무선 접속하여 통신하는 구성이어야 한다.When not transmitted in a text message, it is transmitted to the mobile switching center and transmitted in packet data of the WCDMA system. In this case, the
이러한 A-GPS 위치기반 시스템(140)의 운용방법을 순서에 의하여 설명하면, 위치기반 서버(210)에 의하여 항법장치(110)로부터 AIDING 정보 요청이 있는 것으로 확인되는 경우(S200), HLR 서버(220)를 제어하여 항법장치가 무선 접속한 기지국(122)의 정보를 확인한다(S210).When the operation method of the A-GPS location-based
위치기반서버(210)는, 기지국(122)의 확인된 위치정보를 위치측정부(240)에 제공하고, 위치측정부(240)를 제어하여 기지국(122) 위치에서 최적상태로 GPS 신호를 수신할 수 있는 GPS 인공위성(100)의 정보인 AIDING 정보를 D-레벨 신호로부터 복조하거나 또는 이미 데이터베이스로 기록된 AIDING 정보를 검색한다(S220).The location-based
위치기반서버(210)는, 이와 같이 복조되거나 검색된 AIDING 정보를 이동교환국을 통하여 항법장치에 전달한다(S230).The location based
항법장치(110)에 전달되는 AIDING 정보는, 선택(OPTION)에 의하여, 문자메시지로 전달되거나 패킷 데이터로 전달된다.The AIDING information transmitted to the
항법장치(110)에 의한 AIDING 정보 확보 방법을 순서에 의하여 설명하면, 항법장치(110)는 GPS 신호를 이용하여 네비게이션 등등으로 응용(APPLICATION)하고자 하는 경우(S300), 이동통신 시스템을 구성하는 이동교환국(130)을 통하여 A-GPS 위치기반 시스템(140)과 접속한다(S310).Referring to the method for securing AIDING information by the
이와 같은 항법장치(110)는, A-GPS 위치기반 시스템(140)에 현재 위치에서의 AIDING 정보를 요청하고, 제공된 AIDING 정보를 확인한다(S320).The
항법장치(110)는 제공되어 확인된 AIDING 정보를 분석하므로, 지정된 GPS 인공위성(100)으로부터 GPS 정보에 의한 S-레벨의 서치레벨 신호를 수신한다(S330).Since the
이러한 항법장치(110)는, 수신된 S-레벨의 서치레벨 신호를 이용하여, 위치정보를 연산하고, 네비게이션 등등으로 응용한다(S340).The
항법장치(110)는, 위치정보의 연산 및 응용이 계속되는 상태에서, 설정된 소정 시간이 계수되었는지를 확인하고(S350), 설정된 소정 시간이 계수되면, GPS 인공위성(100)의 수신 신호에 D-레벨의 신호가 포함되어 AIDING 정보를 복조할 수 있는지 확인한다(S360).The
항법장치(110)에 의하여 직접 수신되는 GPS 인공위성 신호로부터 AIDING 정보를 복조할 수 있는 D-레벨의 신호가 수신되는지를 확인한다(S370).It is checked whether a D-level signal capable of demodulating AIDING information is received from the GPS satellite signal directly received by the navigation apparatus 110 (S370).
직접 수신되는 GPS 인공위성 신호로부터 AIDING 정보를 검출하는 D-레벨의 신호를 확인할 수 없는 경우, 상기 접속과정(S310)으로 궤환하고, D-레벨 신호가 수신됨을 확인하는 경우는, 서치레벨 신호를 수신할 수 있는 S-레벨의 신호가 수신되는지 확인한다(S380).If the D-level signal for detecting the AIDING information cannot be confirmed from the GPS satellite signal received directly, the method returns to the connection process S310 and receives the search level signal when confirming that the D-level signal is received. Check whether the S-level signal can be received (S380).
이러한 S-레벨의 신호가 수신되지 않는 경우, 접속과정(S310)으로 궤환하고, 수신되는 경우는, 운용중인 응용 프로그램이 완료되었는지를 판단하여(S390), 확인과정(S340)으로 궤환하거나 종료로 진행한다.If the signal of the S-level is not received, it is fed back to the access process (S310), and when received, it is determined whether the running application program is completed (S390), and returned to the confirmation process (S340) or terminated. Proceed.
도 8 을 참조하여, 본 발명 항법장치에 의한 것으로, GPS 인공위성으로부터 수신되는 GPS 신호 수신레벨별 운용방법을 시간 차이로 설명한다.With reference to FIG. 8, the operation method by GPS signal reception level received from a GPS satellite by the navigation apparatus of the present invention will be described with time difference.
GPS 인공위성의 GPS 신호를 수신하여 이용 항법장치(110)가 처음 운용되는 t0 시간에는, MS 모드로 운용되어, A-GPS 위치기반 시스템(140)으로부터 복조된 AIDING 정보를 제공받고, STANDALONE 모드로 전환되어 운용되며, 이러한 상태가 설정된 소정 시간이 계수되는 t1의 주기 까지 지속된다.At the time t0 when the GPS system of the GPS satellite is used and the
이러한 t1의 주기 시간에, 항법장치(110)가 GPS 인공위성(100)으로부터 수신되는 신호를 분석하고, 복조레벨의 신호가 수신되지 않으므로, 다시 MS 모드로 전환 운용되어 A-GPS 위치기반 시스템(140)으로부터 AIDING 정보를 제공 받으므로, 다시 STANDALONE 모드로 전환되어 운용된다.At this time period t1, since the
이와 같이 STANDALONE 모드로 운용되는 상태에서, 설정된 주기 시간이 계수되어 t2 시간이 된 경우, 항법장치가 GPS 인공위성으로부터 D-레벨의 신호를 수신할 수 있으므로, AIDING 정보를 갱신하지 않아도 되며, STANDALONE 모드로 운용되 는 상태가 지속된다.In this state of operation in the STANDALONE mode, when the set cycle time is counted and becomes t2 time, the navigation device can receive the D-level signal from the GPS satellites, so that the AIDING information does not need to be updated. Operation continues.
또한, t3 시간에도 동일한 상태가 지속 유지된다.In addition, the same state is maintained in t3 time.
이때 항법장치(110)가 설정된 주기의 시간이 계수되지 않은 상태에서도, 위도와 경도 등에 의한 위치정보를 연산하는 S-레벨의 신호를 GPS 인공위성(100)으로부터 수신하지 못하는 경우, MS 모드로 전환 운용되어 AIDING 정보를 다시 제공받고, S-레벨의 신호가 수신되는지 확인하는 과정이, S-레벨의 신호가 수신되어 응용에 이용될 때까지 반복된다.At this time, even when the time of the set period is not counted by the
선택에 의한 것으로, 이러한 t2 와 t3의 시간에는 지정된 GPS 인공위성(100)으로부터 D-레벨의 신호를 수신하고 AIDING 정보를 연산할 수 있으며, 다른 일예로, 동일한 GPS 인공위성으로부터 D-레벨의 신호가 수신되는 것만을 확인하여, 연산하지 않고 STANDALONE 모드로 운용할 수도 있다.By selection, at the time of t2 and t3, it is possible to receive the D-level signal from the designated
상기와 같은 구성의 본 발명은, 항법장치의 운용 초기에, MS 모드로 운용되어 AIDING 정보를 신속하게 제공받고 위치정보를 연산하므로, 응용서비스를 빠르게 제공하는 산업적 이용효과가 있다.The present invention having the above-described configuration is operated in the MS mode at the beginning of the operation of the navigation apparatus, and thus receives the AIDING information quickly and calculates the position information, thereby providing an industrial use effect of providing the application service quickly.
또한, STANDALONE 모드로 운용되는 상태에서, GPS 인공위성으로부터 궤도정보를 복조할 수 있는 신호를 수신하지 못하는 경우에만 MS 모드로 운용되므로, 이동통신 시스템에 접속하여 발생하는 통신비용을 줄이고 운용 및 유지비용을 줄이는 사용상 편리한 효과가 있다.In addition, in the STANDALONE mode, it operates in the MS mode only when it does not receive a signal capable of demodulating orbit information from the GPS satellites, thereby reducing the communication costs incurred by accessing the mobile communication system and reducing the operation and maintenance costs. There is a convenient effect of reducing the use.
또한, 항법장치가 정상적인 AIDING 정보를 제공받은 후에 STANDALONE 모드로 운용하므로, 연산되는 위치정보의 정확성이 제고되어 위치정보의 신뢰도와 선호도를 제고하는 사용상 편리한 효과가 있다.In addition, since the navigation device is operated in the STANDALONE mode after receiving normal AIDING information, the accuracy of the calculated position information is improved, thereby improving the reliability and preference of the position information.
Claims (25)
Translated fromKoreanPriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020060115045AKR100827812B1 (en) | 2006-11-21 | 2006-11-21 | Mobile communication location based system and A-PSP location based system and operation method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020060115045AKR100827812B1 (en) | 2006-11-21 | 2006-11-21 | Mobile communication location based system and A-PSP location based system and operation method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR100827812B1true KR100827812B1 (en) | 2008-05-07 |
Family
ID=39649819
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020060115045AActiveKR100827812B1 (en) | 2006-11-21 | 2006-11-21 | Mobile communication location based system and A-PSP location based system and operation method |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR100827812B1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101041157B1 (en)* | 2008-07-08 | 2011-06-13 | 삼성전자주식회사 | Apparatus and method for sharing auxiliary data of the A-Swiss terminal |
| WO2013170833A3 (en)* | 2012-09-06 | 2014-02-06 | 中兴通讯股份有限公司 | Multimode multi-standby assisted global positioning method and device |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06148308A (en)* | 1992-11-05 | 1994-05-27 | Toshiba Corp | Traveling body position detector |
| KR20030064422A (en)* | 2000-12-22 | 2003-07-31 | 에릭슨 인크. | Position updating method for a mobile terminal equipped with a positioning receiver |
| KR20040019657A (en)* | 2002-08-28 | 2004-03-06 | 에스케이 텔레콤주식회사 | Method and System for Assisting of Wireless Communication Terminal's Location Decision by Using Wireless Network |
| KR20060025111A (en)* | 2004-07-03 | 2006-03-20 | 서프 테크놀러지, 인코포레이티드 | Assisted Location Communications Systems and Devices and Methods of Positioning Using Them |
| KR20060028235A (en)* | 2004-09-24 | 2006-03-29 | 엘지전자 주식회사 | Method of acquiring GPS information of mobile communication terminal equipped with GPS function |
- 2006
- 2006-11-21KRKR1020060115045Apatent/KR100827812B1/enactiveActive
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06148308A (en)* | 1992-11-05 | 1994-05-27 | Toshiba Corp | Traveling body position detector |
| KR20030064422A (en)* | 2000-12-22 | 2003-07-31 | 에릭슨 인크. | Position updating method for a mobile terminal equipped with a positioning receiver |
| KR20040019657A (en)* | 2002-08-28 | 2004-03-06 | 에스케이 텔레콤주식회사 | Method and System for Assisting of Wireless Communication Terminal's Location Decision by Using Wireless Network |
| KR20060025111A (en)* | 2004-07-03 | 2006-03-20 | 서프 테크놀러지, 인코포레이티드 | Assisted Location Communications Systems and Devices and Methods of Positioning Using Them |
| KR20060028235A (en)* | 2004-09-24 | 2006-03-29 | 엘지전자 주식회사 | Method of acquiring GPS information of mobile communication terminal equipped with GPS function |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101041157B1 (en)* | 2008-07-08 | 2011-06-13 | 삼성전자주식회사 | Apparatus and method for sharing auxiliary data of the A-Swiss terminal |
| WO2013170833A3 (en)* | 2012-09-06 | 2014-02-06 | 中兴通讯股份有限公司 | Multimode multi-standby assisted global positioning method and device |
| CN103675836A (en)* | 2012-09-06 | 2014-03-26 | 中兴通讯股份有限公司 | Multi-module multi-standby auxiliary global positioning method and device |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101048671B (en) | satellite based positioning | |
| EP2577345B1 (en) | Position determination using measurements from past and present epochs | |
| KR101313955B1 (en) | On demand positioning | |
| EP1443791B1 (en) | Location system and method for operating a mobile terminal as a responsible entity for selecting a positioning method | |
| EP2443477B1 (en) | Post-processing real-time data | |
| KR100583010B1 (en) | How to determine the location of the GPS receiver using the estimated reference time | |
| US7724186B2 (en) | Enhanced aiding in GPS systems | |
| US20070120737A1 (en) | Method and system for providing location assistance information to a mobile station | |
| KR20080022581A (en) | Satellite positioning system receiver and method | |
| US20120280858A1 (en) | Method and System for Enhancing a Location Server Reference Database Through Round-Trip Time (RTT) Measurements | |
| US20110199260A1 (en) | Method and system for determining a location of a cellular base station utilizing mobile gnss velocity and corresponding cellular doppler | |
| CN101952845A (en) | Mobile status indicator for location-based services | |
| US20210109231A1 (en) | Detection of gnss data manipulation based on correctional gnss data | |
| US8638258B2 (en) | Method and system for a virtual wide area GNSS reference network | |
| KR100827812B1 (en) | Mobile communication location based system and A-PSP location based system and operation method | |
| KR20120048953A (en) | Apparatus, system and method for determining position of mobile terminal using access point including gnss receiver | |
| KR101058098B1 (en) | A terminal and a system for measuring its own location according to the location information of another terminal and the reliability of the location information and a method for measuring the location | |
| KR100898993B1 (en) | Satellite based positioning | |
| JP2006300707A (en) | POSITIONING SYSTEM, TERMINAL DEVICE, CONTROL METHOD FOR TERMINAL DEVICE, CONTROL PROGRAM FOR TERMINAL DEVICE, COMPUTER-READABLE RECORDING MEDIUM RECORDING CONTROL PROGRAM FOR TERMINAL DEVICE |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application | Patent event code:PA01091R01D Comment text:Patent Application Patent event date:20061121 | |
| PA0201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection | Comment text:Notification of reason for refusal Patent event date:20071109 Patent event code:PE09021S01D | |
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration | Patent event code:PE07011S01D Comment text:Decision to Grant Registration Patent event date:20080418 | |
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment | Comment text:Registration of Establishment Patent event date:20080429 Patent event code:PR07011E01D | |
| PR1002 | Payment of registration fee | Payment date:20080430 End annual number:3 Start annual number:1 | |
| PG1601 | Publication of registration | ||
| PR1001 | Payment of annual fee | Payment date:20110404 Start annual number:4 End annual number:4 | |
| PR1001 | Payment of annual fee | Payment date:20120402 Start annual number:5 End annual number:5 | |
| FPAY | Annual fee payment | Payment date:20130403 Year of fee payment:6 | |
| PR1001 | Payment of annual fee | Payment date:20130403 Start annual number:6 End annual number:6 | |
| FPAY | Annual fee payment | Payment date:20140325 Year of fee payment:7 | |
| PR1001 | Payment of annual fee | Payment date:20140325 Start annual number:7 End annual number:7 | |
| FPAY | Annual fee payment | Payment date:20160328 Year of fee payment:9 | |
| PR1001 | Payment of annual fee | Payment date:20160328 Start annual number:9 End annual number:9 | |
| FPAY | Annual fee payment | Payment date:20170329 Year of fee payment:10 | |
| PR1001 | Payment of annual fee | Payment date:20170329 Start annual number:10 End annual number:10 | |
| FPAY | Annual fee payment | Payment date:20190328 Year of fee payment:12 | |
| PR1001 | Payment of annual fee | Payment date:20190328 Start annual number:12 End annual number:12 | |
| PR1001 | Payment of annual fee | Payment date:20200330 Start annual number:13 End annual number:13 | |
| PR1001 | Payment of annual fee | Payment date:20210401 Start annual number:14 End annual number:14 | |
| PR1001 | Payment of annual fee | Payment date:20230323 Start annual number:16 End annual number:16 | |
| PR1001 | Payment of annual fee | Payment date:20240321 Start annual number:17 End annual number:17 |