KR100594171B1 - Low speed can input signal processing gateway for vehicles and its input signal processing method - Google Patents
Low speed can input signal processing gateway for vehicles and its input signal processing methodDownload PDFInfo
- Publication number
- KR100594171B1 KR100594171B1KR1020030056555AKR20030056555AKR100594171B1KR 100594171 B1KR100594171 B1KR 100594171B1KR 1020030056555 AKR1020030056555 AKR 1020030056555AKR 20030056555 AKR20030056555 AKR 20030056555AKR 100594171 B1KR100594171 B1KR 100594171B1
- Authority
- KR
- South Korea
- Prior art keywords
- protocol
- port
- input signal
- low speed
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

Classifications
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L12/40006—Architecture of a communication node
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R16/00—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for
- B60R16/02—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements
- B60R16/023—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements for transmission of signals between vehicle parts or subsystems
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R16/00—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for
- B60R16/02—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements
- B60R16/03—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements for supply of electrical power to vehicle subsystems or for
- B60R16/033—Electric or fluid circuits specially adapted for vehicles and not otherwise provided for; Arrangement of elements of electric or fluid circuits specially adapted for vehicles and not otherwise provided for electric constitutive elements for supply of electrical power to vehicle subsystems or for characterised by the use of electrical cells or batteries
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L69/00—Network arrangements, protocols or services independent of the application payload and not provided for in the other groups of this subclass
- H04L69/08—Protocols for interworking; Protocol conversion
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L2012/40208—Bus networks characterized by the use of a particular bus standard
- H04L2012/40215—Controller Area Network CAN
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L2012/40267—Bus for use in transportation systems
- H04L2012/40273—Bus for use in transportation systems the transportation system being a vehicle
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Mechanical Engineering (AREA)
- Computer Security & Cryptography (AREA)
- Small-Scale Networks (AREA)
Abstract
Translated fromKoreanDescription
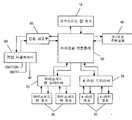
Translated fromKorean도 1은 본 발명에 따른 차량용 로우 스피드 캔 입력신호 처리 게이트웨이를 도시한 블록도.1 is a block diagram illustrating a low speed can input signal processing gateway for a vehicle according to the present invention;
도 2는 본 발명에 따른 차량용 로우 스피드 캔 입력신호 처리 게이트웨이의 입력신호 처리 방법을 도시한 흐름도.2 is a flowchart illustrating an input signal processing method of a low speed can input signal processing gateway for a vehicle according to the present invention;
<도면의 주요 부분에 대한 부호의 설명><Explanation of symbols for the main parts of the drawings>
10: 로우 스피드 캔 포트 20: 하이 스피드 캔 포트10: low speed can pot 20: high speed can pot
25: 하이 스피드 캔 드라이버 30: K-라인 포트25: High Speed Can Driver 30: K-Line Port
35: K-라인 드라이버 40: 온/오프 주변 포트35: K-line driver 40: On / off peripheral port
50: 마이크로 컨트롤러 60: 전압 레귤레이터50: microcontroller 60: voltage regulator
65: 전원 공급부
65: power supply
본 발명은 차량 내에서 서로 다른 장치들이 서로간의 제어명령, 서로간의 필요 데이터를 주고받으면서 통신할 수 있도록 하는 차량용 게이트웨이 및 게이트웨이의 신호 처리 방법에 관한 것이며, 보다 상세히는 차량용 로우 스피드 캔(CAN; Control Area Network) 입력신호 처리 게이트웨이 및 그 입력신호 처리방법에 관한 것이다.
BACKGROUND OF THE INVENTION 1. Field of the Invention The present invention relates to a vehicle gateway and a signal processing method of a gateway that allows different devices to communicate with each other by exchanging control commands and necessary data with each other in a vehicle, and more particularly, a vehicle low speed can (CAN) control. Area Network) The present invention relates to an input signal processing gateway and an input signal processing method thereof.
오늘날의 차량은 고유의 수송기능 뿐만 아니라 운전자에게 보다 안락하고 편리한 사무공간을 제공하는 기능을 구비해 가고 있는 실정이며, 이에 따라서 차량에 보다 많은 전기부품들이 장착되어 차량 설계가 점점 복잡해지고 각각의 전기부품간의 전기적 연결을 위한 전선(wire)의 수도 증가하고 있다.Today's vehicles are equipped with inherent transport functions as well as functions that provide a more comfortable and convenient office space for the driver. As a result, the vehicle is equipped with more electric parts, making the design of the vehicle more complicated and the electric The number of wires for electrical connection between components is also increasing.
한편, 상기와 같이 많은 차량의 전기부품 중에서 특히 차량의 바디(body)에 장착되는 것으로는, 크게 BCM(Body Control Module) 유닛, 드라이버 도어 모듈(Driver Door Module) 유닛, 어시스트 도어 모듈(Assist Door Module) 유닛, 파워 시트(Power seat) ECU 등이 있다.On the other hand, among the electrical parts of many vehicles as described above, particularly, the body (body) of the vehicle (body), BCM (Body Control Module) unit, Driver Door Module (Assist Door Module) unit, Assist Door Module (Assist Door Module) ) Unit, power seat ECU.
상기 BCM 유닛은 차량 내의 각종 램프, 와이퍼, 각종 장치간의 타이밍을 제어하는 ECU로서, 차량의 키 삽입 유무, ACC 전원관계, 점화(Ignition) 전원관계, 발전기(Alternator) 동작관계, 스피드 연산관계, 키리스(Keyless) 동작신호 등을 제어한다.The BCM unit is an ECU that controls timing between various lamps, wipers, and various devices in a vehicle. The BCM unit includes a vehicle having a key inserted therein, an ACC power relationship, an ignition power relationship, an alternator operation relationship, a speed calculation relationship, and a key. Controls lease (keyless) operation signals.
상기 드라이버 도어 모듈 유닛은 전동 미러(Mirror)의 동작신호, 폴드(Fold) 의 동작신호, 윈도우(Window)의 동작신호, 시트(Seat)와 틸트(Tilt) 제어신호, 메모리 관련 신호 등을 제어한다.The driver door module unit controls an operation signal of an electric mirror, an operation signal of a fold, an operation signal of a window, a seat and tilt control signal, a memory related signal, and the like. .
상기 어시스트 도어 모듈 유닛은 조수석 도어의 잠금 여부, 도어 개폐 여부 등과 더불어 전동 미러 제어 기능, 윈도우 개폐 기능을 제어한다.The assist door module unit controls an electric mirror control function and a window opening / closing function as well as whether the passenger seat door is locked or not.
상기 파워 시트 ECU는 본래의 시트 제어 기능인 프론트 하이트 모터(front height motor) 제어, 리어 하이트 모터(rear height motor) 제어, 슬라이드 모터(slide motor) 제어, 리클라인 모터(recline motor) 제어를 담당한다.
The power seat ECU is responsible for front height motor control, rear height motor control, slide motor control, and recline motor control, which are original seat control functions.
이외에도 차량 내에서 무선인터넷을 이용하고, GPS 위성을 이용한 위치 추적 시스템을 운용하기 위해서는 서로 전선을 통해 통신하는 수많은 전기부품들이 요구되고 있으며, 이로 인해 차량 설계 시 전선의 증가를 초래하고, 더불어서 전선의 경로 문제, 부피 등의 증가로 인하여 차량의 중량이 증가할 뿐만 아니라 고장 진단에 있어서 어려움이 있다.In addition, in order to use the wireless internet in the vehicle and operate the positioning system using the GPS satellites, a large number of electrical components communicating with each other are required, which leads to an increase in the wire design in the vehicle design. Due to an increase in the route problem, volume, etc., not only the weight of the vehicle is increased but also there is a difficulty in diagnosing the failure.
또한, 설계 변경 시에는 관련 전기부품들의 수정이 불가피하고 각각의 전기부품들의 변경에 따른 전선의 신규 설치가 요구되므로, 설계 상의 마진 확보가 어려워져 설계 변경 자체가 어려워지는 문제점이 있다.
In addition, since the modification of the related electrical parts is inevitable and new installation of wires is required according to the change of each electric component, it is difficult to secure a margin of the design and thus the design change itself becomes difficult.
현재에는, 이러한 설계 변경의 어려움을 극복하기 위하여 캔 프로토콜이나 LIN(Local Interconnect Network) 프로토콜을 이용하는 통신 방식을 적용하여 복수개의 전기부품들을 차량용 게이트웨이에 연결하여 사용하고 있다.Currently, in order to overcome such a design change, a plurality of electrical components are connected to a vehicle gateway by using a communication method using a CAN protocol or a local interconnect network (LIN) protocol.
그러나, 상기와 같은 통신 방식은 전기부품들간의 신호 처리 프로토콜이 동일한 경우에만 적용이 가능하고, 전기부품들간의 신호 처리 프로토콜이 다른 경우에는 상호 호환되지 않기 때문에 신호 처리 프로토콜이 서로 다른 전기부품들의 호환성을 보장하기 위한 해결책이 없었다.
However, the above communication method is applicable only when the signal processing protocols between the electrical components are the same, and when the signal processing protocols between the electrical components are different, they are not compatible with each other. There was no solution to ensure that.
본 발명은 상술한 종래의 문제점을 해소하기 위한 것으로서, 본 발명의 목적은 로우 스피드 캔 포트를 통하여 입력되는 신호의 프로토콜을 분석하여 구한 프로토콜 ID 값에 따라서 로우 스피드 캔 포트에 연결된 유닛이 하이 스피드 캔 포트, K-라인 포트, 온/오프 주변 포트에 각각 연결된 유닛 중 어느 유닛과 통신할 것인지를 결정한 후, 상기 입력 신호를 상기 하이 스피드 캔 포트, K-라인 포트, 온/오프 주변 포트 중 어느 하나의 포트를 통해 출력할 수 있도록 입력 신호의 프로토콜을 변환하고 변환된 프로토콜로 상기 입력 신호를 새롭게 셋팅하여 상기 하이 스피드 캔 포트, K-라인 포트, 온/오프 주변 포트 중 어느 하나의 포트를 통해 출력하도록 된 차량용 로우 스피드 캔 입력신호 처리 게이트웨이 및 그 입력신호 처리방법을 제공하는데 있다.
SUMMARY OF THE INVENTION The present invention has been made to solve the above-mentioned conventional problems, and an object of the present invention is a unit connected to a low speed can port according to a protocol ID value obtained by analyzing a protocol of a signal input through a low speed can port. After deciding which unit to connect to a port, a K-line port, and an on / off peripheral port, respectively, the input signal is sent to the high speed can port, the K-line port, or an on / off peripheral port. Convert the protocol of the input signal so that it can be output through the port of the port, and newly set the input signal with the converted protocol to output through any one of the high speed can port, K-line port, and on / off peripheral port. A low speed can input signal processing gateway for a vehicle and an input signal processing method thereof are provided.
상기 본 발명의 목적을 달성하기 위한 차량용 로우 스피드 캔 입력신호 처리 게이트웨이의 일실시예는, 로우 스피드 캔 프로토콜로 통신하는 유닛이 연결되는 로우 스피드 캔 포트와; 하이 스피드 캔 프로토콜로 통신하는 유닛이 연결되는 하 이 스피드 캔 포트에 연결되어 상기 로우 스피드 캔 포트를 통해 입력되는 신호의 프로토콜을 하이 스피드 캔 프로토콜로 변환하고 변환된 프로토콜로 입력 신호를 새롭게 셋팅하여 출력하는 하이 스피드 캔 드라이버와; K-라인 프로토콜로 통신하는 유닛이 연결되는 K-라인 포트에 연결되어 상기 로우 스피드 캔 포트를 통해 입력되는 신호의 프로토콜을 K-라인 프로토콜로 변환하고 변환된 프로토콜로 입력 신호를 새롭게 셋팅하여 출력하는 K-라인 드라이버와; 상기 각각의 드라이버의 작동을 제어하고, 온/오프 신호를 처리하는 차량의 주변 유닛(peripheral unit)이 연결되는 온/오프 주변 포트에 연결되어 상기 로우 스피드 캔 포트를 통해 입력되는 신호의 프로토콜을 온/오프 주변 프로토콜 변환하고 변환된 프로토콜로 입력 신호를 새롭게 셋팅하여 출력하며, 상기 로우 스피드 캔 포트를 통해 입력되는 신호의 프로토콜을 분석하여 구한 프로토콜 ID 값에 따라서 로우 스피드 캔 포트에 연결된 유닛이 상기 하이 스피드 캔 포트, K-라인 포트, 온/오프 주변 포트에 각각 연결된 유닛 중 어느 유닛과 통신할 것인지를 결정하여 상기 로우 스피드 캔 포트에 연결된 유닛이 상기 통신 포트들에 연결된 유닛과 통신하도록 제어하는 마이크로 컨트롤러; 및 차량 점화 신호(IGNITION)가 입력되면 차량용 배터리 전원(BATT+)을 일정 레벨의 정전압으로 변환하는 전압 레귤레이터를 통하여 공급되는 전원을 상기 마이크로 컨트롤러로 공급하는 전원 공급부로 구성된다.
An embodiment of a vehicular low speed can input signal processing gateway for achieving the object of the present invention comprises: a low speed can port to which a unit communicating with a low speed can protocol is connected; Connected to the high speed can port to which the unit communicating with the high speed can protocol is connected, the protocol of the signal inputted through the low speed can port is converted to the high speed can protocol, and the newly set input signal is outputted by the converted protocol. A high speed can driver; It is connected to the K-line port to which the unit communicating with the K-line protocol is connected, and converts the protocol of the signal input through the low speed can port into the K-line protocol, and newly sets and outputs the input signal with the converted protocol. A K-line driver; A protocol of a signal input through the low speed can port is connected to an on / off peripheral port connected to a peripheral unit of a vehicle which controls an operation of each driver and processes an on / off signal. A unit connected to the low speed can port is connected to the low speed can port according to a protocol ID value obtained by analyzing a protocol of a signal input through the low speed can port. A microcomputer that determines which unit is connected to each of the speed can port, the K-line port, and the on / off peripheral port to control the unit connected to the low speed can port to communicate with the unit connected to the communication ports. controller; And a power supply unit supplying power supplied through the voltage regulator for converting the vehicle battery power Batt + to a constant level when the vehicle ignition signal IGNITION is input.
상기 본 발명의 목적을 달성하기 위한 차량용 로우 스피드 캔 입력신호 처리 게이트웨이의 입력신호 처리방법의 일실시예는, 로우 스피드 캔 프로토콜로 통신하 는 유닛의 출력 신호가 로우 스피드 캔 포트를 통해 입력되면, 마이크로 컨트롤러가 입력 신호의 프로토콜을 분석하여 구한 프로토콜 ID 값에 따라서 로우 스피드 캔 포트에 연결된 유닛이 하이 스피드 캔 포트, K-라인 포트, 온/오프 주변 포트에 각각 연결된 유닛 중 어느 유닛과 통신할 것인지를 결정하는 단계와; 상기 하이 스피드 캔 포트에 연결된 유닛과 통신할 것으로 결정되면, 하이 스피드 캔 드라이버가 상기 마이크로 컨트롤러로부터 전달받은 상기 입력 신호의 프로토콜을 하이 스피드 캔 프로토콜로 변환하고 변환된 프로토콜로 입력 신호를 새롭게 셋팅하여 출력하는 단계와; 상기 K-라인 포트에 연결된 유닛과 통신할 것으로 결정되면, K-라인 드라이버가 상기 마이크로 컨트롤러로부터 전달받은 상기 입력 신호의 프로토콜을 K-라인 프로토콜로 변환하고 변환된 프로토콜로 입력 신호를 새롭게 셋팅하여 출력하는 단계; 및 상기 온/오프 주변 포트에 연결된 유닛과 통신할 것으로 결정되면, 상기 마이크로 컨트롤러가 상기 입력 신호의 프로토콜을 온/오프 주변 프로토콜 변환하고 변환된 프로토콜로 입력 신호를 새롭게 셋팅하여 출력하는 단계로 이루어진다.
One embodiment of the input signal processing method of the vehicle low speed can input signal processing gateway for achieving the object of the present invention, when the output signal of the unit communicating with the low speed can protocol is input through the low speed can port, According to the protocol ID value obtained by analyzing the protocol of the input signal, the unit connected to the low speed can port will communicate with the unit connected to the high speed can port, the K-line port, and the on / off peripheral port respectively. Determining; If it is determined to communicate with the unit connected to the high speed can port, the high speed can driver converts the protocol of the input signal received from the microcontroller into a high speed can protocol and newly sets the input signal with the converted protocol and outputs it. Making a step; If it is determined to communicate with a unit connected to the K-line port, the K-line driver converts the protocol of the input signal received from the microcontroller into a K-line protocol and newly sets the input signal with the converted protocol and outputs it. Doing; And when the microcontroller determines to communicate with a unit connected to the on / off peripheral port, converting the protocol of the input signal into an on / off peripheral protocol and newly setting and outputting the input signal with the converted protocol.
이하, 본 발명의 실시예를 첨부한 도면을 참조하여 설명하기로 한다.Hereinafter, embodiments of the present invention will be described with reference to the accompanying drawings.
도 1을 참조하면, 로우 스피드 캔 포트(10)에는 차량에서 로우 스피드(예컨대, 10kbps) 캔 프로토콜로 통신하는 유닛이 연결된다.Referring to FIG. 1, a low speed can
하이 스피드 캔 포트(20)에는 차량에서 하이 스피드(예컨대, 500kbps) 캔 프 로토콜로 통신하는 유닛이 연결된다.The high speed can
하이 스피드 캔 드라이버(25)는 상기 하이 스피드 캔 포트(20)에 연결되어 상기 로우 스피드 캔 포트(10)를 통해 입력되는 신호의 프로토콜을 하이 스피드 캔 프로토콜로 변환하고 변환된 프로토콜로 입력 신호를 새롭게 셋팅하여 하이 스피드 캔 포트(20)로 출력한다.The high speed can
K-라인 포트(30)에는 차량에서 K-라인 프로토콜로 통신하는 유닛(예컨대, 캔 프로토콜로 통신하지 않고 1:1 연결라인을 가지는 유닛)이 연결된다.The K-
K-라인 드라이버(35)는 K-라인 포트(30)에 연결되어 상기 로우 스피드 캔 포트(10)를 통해 입력되는 신호의 프로토콜을 K-라인 프로토콜로 변환하고 변환된 프로토콜로 입력 신호를 새롭게 셋팅하여 K-라인 포트(30)로 출력한다.The K-
온/오프 주변 포트(40)에는 온/오프 신호를 처리하는 차량의 주변 유닛(peripheral unit; 예컨대, 에어백 충격센서 등)이 연결된다.On / off
마이크로 컨트롤러(50)는 상기 각각의 드라이버(25,35)의 작동을 제어한다.The
상기 마이크로 컨트롤러(50)는 온/오프 주변 포트(40)에 연결되어 상기 로우 스피드 캔 포트(10)를 통해 입력되는 신호의 프로토콜을 온/오프 주변 프로토콜 변환하고 변환된 프로토콜로 입력 신호를 새롭게 셋팅하여 온/오프 주변 포트(40)로 출력한다.The
상기 마이크로 컨트롤러(50)는 로우 스피드 캔 포트(10)를 통해 입력되는 신호의 프로토콜을 분석하여 구한 프로토콜 ID 값에 따라서 로우 스피드 캔 포트(10)에 연결된 유닛이 상기 하이 스피드 캔 포트(20), K-라인 포트(30), 온/오프 주변 포트(40)에 각각 연결된 유닛 중 어느 유닛과 통신할 것인지를 결정하여 상기 로우 스피드 캔 포트(10)에 연결된 유닛이 상기 통신 포트들(20,30,40)에 연결된 유닛과 통신하도록 제어한다.The
전원 공급부(65)는 차량 점화 신호(IGNITION)가 입력되면 차량용 배터리 전원(BATT+)을 일정 레벨의 정전압으로 변환하는 전압 레귤레이터(60)를 통하여 공급되는 전원을 상기 마이크로 컨트롤러(50)로 공급한다.
When the vehicle ignition signal IGNITION is input, the
상기와 같이 구성되는 본 발명에 따른 차량용 로우 스피드 캔 입력신호 처리 게이트웨이는 도 2에 도시된 바와 같은 입력신호 처리방법에 의해 다음과 같이 작동한다.The low speed can input signal processing gateway for a vehicle according to the present invention configured as described above operates as follows by the input signal processing method as shown in FIG.
차량에서 로우 스피드 캔 프로토콜로 통신하는 특정한 유닛의 출력 신호가 상기 로우 스피드 캔 포트(10)를 통해 입력되면(S10), 상기 마이크로 컨트롤러(50)는 먼저 이 입력 신호의 프로토콜을 분석하여 프로토콜 ID 값을 구한다(S20).When an output signal of a specific unit communicating with a low speed can protocol in a vehicle is input through the low speed can port 10 (S10), the
이어서, 상기 마이크로 컨트롤러(50)는 구해진 입력 신호의 프로토콜 ID 값에 따라서 상기 로우 스피드 캔 포트(10)에 연결된 특정한 유닛이 상기 하이 스피드 캔 포트(20), K-라인 포트(30), 온/오프 주변 포트(40)에 각각 연결된 유닛 중 어느 유닛과 통신할 것인지를 결정한다(S30,S40).
Subsequently, the
만약, 상기 입력 신호의 프로토콜 ID 값이 하이 스피드 캔 포트(20)에 연결된 유닛과 통신하기 위한 것으로 판별되면(S30), 상기 마이크로 컨트롤러(50)는 상 기 하이 스피드 캔 드라이버(25)로 로우 스피드 캔 포트(10)를 통해 입력된 신호를 전달하며, 이때 상기 하이 스피드 캔 드라이버(25)는 먼저, 이 입력 신호의 프로토콜을 하이 스피드 캔 프로토콜로 변환한 다음(S32), 하이 스피드 캔 프로토콜로 입력 신호를 새롭게 셋팅한 후(S34), 하이 스피드 캔 포트(20)로 출력한다(S36).If it is determined that the protocol ID value of the input signal is to communicate with the unit connected to the high speed can port 20 (S30), the
이에 따라서, 차량에서 로우 스피드 캔 프로토콜로 통신하는 상기 특정한 유닛이 차량에서 하이 스피드 캔 프로토콜로 통신하는 특정한 유닛과 통신하게 된다.
Accordingly, the specific unit communicating in the vehicle in the low speed can protocol communicates with the specific unit in the vehicle in the high speed can protocol.
만약, 상기 입력 신호의 프로토콜 ID 값이 K-라인 포트(30)에 연결된 유닛과 통신하기 위한 것으로 판별되면(S40), 상기 마이크로 컨트롤러(50)는 상기 K-라인 드라이버(35)로 로우 스피드 캔 포트(10)를 통해 입력된 신호를 전달하며, 이때 상기 K-라인 드라이버(35)는 먼저, 이 입력 신호의 프로토콜을 K-라인 프로토콜로 변환한 다음(S42), K-라인 프로토콜로 입력 신호를 새롭게 셋팅한 후(S44), K-라인 포트(30)로 출력한다(S46).If it is determined that the protocol ID value of the input signal is for communicating with a unit connected to the K-line port 30 (S40), the
이에 따라서, 차량에서 로우 스피드 캔 프로토콜로 통신하는 상기 특정한 유닛이 차량에서 K-라인 프로토콜로 통신하는 특정한 유닛과 통신하게 된다.
Accordingly, the specific unit communicating in the vehicle in the low speed can protocol communicates with the specific unit in the vehicle in the K-line protocol.
만약, 상기 입력 신호의 프로토콜 ID 값이 상기 하이 스피드 캔 포트(20)에 연결된 유닛과 통신하기 위한 것도 아니고, 상기 K-라인 포트(30)에 연결된 유닛과 통신하기 위한 것도 아닌 경우, 상기 마이크로 컨트롤러(50)는 상기 입력 신호의 프로토콜 ID 값이 상기 온/오프 주변 포트(40)에 연결된 유닛과 통신하기 위한 것 으로 판별한다. 이어서, 상기 마이크로 컨트롤러(50)는 먼저, 상기 입력 신호의 프로토콜을 온/오프 주변 프로토콜 변환한 다음(S50), 온/오프 주변 프로토콜로 입력 신호를 새롭게 셋팅한 후(S52), 온/오프 주변 포트(40)로 출력한다(S54).If the protocol ID value of the input signal is not for communicating with the unit connected to the high speed can port 20 or for communicating with the unit connected to the K-
이에 따라서, 차량에서 로우 스피드 캔 프로토콜로 통신하는 상기 특정한 유닛이 차량에서 온/오프 주변 프로토콜로 통신하는 특정한 유닛과 통신하게 된다.
Accordingly, the particular unit communicating in the vehicle with the low speed can protocol communicates with the particular unit communicating with the on / off peripheral protocol in the vehicle.
상술한 바와 같이, 본 발명에 따른 차량용 로우 스피드 캔 입력신호 처리 게이트웨이는 신호 처리 프로토콜이 로우 스피드 캔 프로토콜과 다른 차량용 각종 유닛들을 게이트웨이의 통신 포트에 연결하는 것만으로 로우 스피드 캔 포트에 연결된 유닛이 이들 유닛들과 통신할 수 있는 장점이 있다.
As described above, the vehicle low speed can input signal processing gateway according to the present invention is a unit connected to the low speed can port by the signal processing protocol is connected to the communication port of the gateway other than the low speed can protocol. There is an advantage in communicating with the units.
이상에서 설명한 것은 본 발명에 따른 차량용 로우 스피드 캔 입력신호 처리 게이트웨이 및 그 입력신호 처리방법을 실시하기 위한 하나의 실시예에 불과한 것으로서, 본 발명은 상기한 실시예에 한정되지 않고, 이하의 특허청구범위에서 청구하는 본 발명의 요지를 벗어남이 없이 본 발명이 속하는 분야에서 통상의 지식을 가진 자라면 누구든지 다양한 변경 실시가 가능한 범위까지 본 발명의 기술적 정신이 있다고 할 것이다.What has been described above is only one embodiment for implementing a vehicle low speed can input signal processing gateway and the input signal processing method according to the present invention, the present invention is not limited to the above-described embodiment, the following claims Without departing from the gist of the present invention claimed in the scope, anyone of ordinary skill in the art will have the technical spirit of the present invention to the extent that various modifications can be made.
Claims (2)
Translated fromKoreanPriority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020030056555AKR100594171B1 (en) | 2003-08-14 | 2003-08-14 | Low speed can input signal processing gateway for vehicles and its input signal processing method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR1020030056555AKR100594171B1 (en) | 2003-08-14 | 2003-08-14 | Low speed can input signal processing gateway for vehicles and its input signal processing method |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20050018225A KR20050018225A (en) | 2005-02-23 |
| KR100594171B1true KR100594171B1 (en) | 2006-06-28 |
Family
ID=37227798
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020030056555AExpired - Fee RelatedKR100594171B1 (en) | 2003-08-14 | 2003-08-14 | Low speed can input signal processing gateway for vehicles and its input signal processing method |
Country Status (1)
| Country | Link |
|---|---|
| KR (1) | KR100594171B1 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116136685B (en)* | 2023-04-14 | 2023-07-18 | 武汉亦创智联信息技术有限公司 | Communication control system and method suitable for high-speed CAN and low-speed CAN |
- 2003
- 2003-08-14KRKR1020030056555Apatent/KR100594171B1/ennot_activeExpired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| KR20050018225A (en) | 2005-02-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107707418B (en) | Communication diagnosis system and communication diagnosis refreshing method | |
| US20180334117A1 (en) | Vehicular wire harness structure | |
| US10780783B2 (en) | Onboard vehicle communication system | |
| US7647147B2 (en) | Multi-platform data communication interface with self-recognizing and self-learning of the host vehicle | |
| JP3082282B2 (en) | In-vehicle communication device | |
| KR20110024216A (en) | How to Change Can Communication Network System and Can Message Priority | |
| KR20030010890A (en) | Network system of automobile using a CAN protocol | |
| CN114165132A (en) | Motor module, management module, and in-vehicle device control system | |
| KR101866725B1 (en) | Communication method of electronic device in vehicle and vehicle having the same | |
| WO2013081096A1 (en) | On-board control system | |
| KR100517180B1 (en) | Gateway for processing high speed can input signal in vehicles and input signal processing method thereof | |
| KR100594171B1 (en) | Low speed can input signal processing gateway for vehicles and its input signal processing method | |
| WO2006112161A1 (en) | Vehicle-mounted communication device and method of communication | |
| KR20050017557A (en) | Gateway for processing k-line input signal in vehicles and input signal processing method thereof | |
| KR20050018227A (en) | Gateway for processing on/off peripheral input signal in vehicles and input signal processing method thereof | |
| KR20050018228A (en) | Gateway for vehicles and input signal processing method thereof | |
| US20140245052A1 (en) | Method and device for storing an item of wake-up information in users of a can bus system | |
| KR20140026101A (en) | A communication module for an automobile and a driving apparatus for an automobile | |
| JP7491362B2 (en) | SECURITY SYSTEM, VEHICLE, SECURITY DEVICE, AND AUTHENTICITY DETERMINATION METHOD | |
| JPH06112939A (en) | Multiplexer | |
| CN111771134A (en) | Radar sensor system and method for operating a radar sensor system | |
| JP2007329671A (en) | Method for detecting disconnection of connection line in communication system | |
| KR100773076B1 (en) | Active CAN Communication Data Transmission / Reception Method | |
| JP2005335622A (en) | In-vehicle device and communication device | |
| EP1487670B1 (en) | Synchronous communication interface sharing for communicating with a plurality of devices |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| PA0109 | Patent application | St.27 status event code:A-0-1-A10-A12-nap-PA0109 | |
| PA0201 | Request for examination | St.27 status event code:A-1-2-D10-D11-exm-PA0201 | |
| PG1501 | Laying open of application | St.27 status event code:A-1-1-Q10-Q12-nap-PG1501 | |
| D13-X000 | Search requested | St.27 status event code:A-1-2-D10-D13-srh-X000 | |
| D14-X000 | Search report completed | St.27 status event code:A-1-2-D10-D14-srh-X000 | |
| E902 | Notification of reason for refusal | ||
| PE0902 | Notice of grounds for rejection | St.27 status event code:A-1-2-D10-D21-exm-PE0902 | |
| T11-X000 | Administrative time limit extension requested | St.27 status event code:U-3-3-T10-T11-oth-X000 | |
| T11-X000 | Administrative time limit extension requested | St.27 status event code:U-3-3-T10-T11-oth-X000 | |
| T11-X000 | Administrative time limit extension requested | St.27 status event code:U-3-3-T10-T11-oth-X000 | |
| T11-X000 | Administrative time limit extension requested | St.27 status event code:U-3-3-T10-T11-oth-X000 | |
| E701 | Decision to grant or registration of patent right | ||
| PE0701 | Decision of registration | St.27 status event code:A-1-2-D10-D22-exm-PE0701 | |
| PR1002 | Payment of registration fee | St.27 status event code:A-2-2-U10-U11-oth-PR1002 Fee payment year number:1 | |
| GRNT | Written decision to grant | ||
| PR0701 | Registration of establishment | St.27 status event code:A-2-4-F10-F11-exm-PR0701 | |
| PG1601 | Publication of registration | St.27 status event code:A-4-4-Q10-Q13-nap-PG1601 | |
| PR1001 | Payment of annual fee | St.27 status event code:A-4-4-U10-U11-oth-PR1001 Fee payment year number:4 | |
| PR1001 | Payment of annual fee | St.27 status event code:A-4-4-U10-U11-oth-PR1001 Fee payment year number:5 | |
| PR1001 | Payment of annual fee | St.27 status event code:A-4-4-U10-U11-oth-PR1001 Fee payment year number:6 | |
| PR1001 | Payment of annual fee | St.27 status event code:A-4-4-U10-U11-oth-PR1001 Fee payment year number:7 | |
| FPAY | Annual fee payment | Payment date:20130530 Year of fee payment:8 | |
| PR1001 | Payment of annual fee | St.27 status event code:A-4-4-U10-U11-oth-PR1001 Fee payment year number:8 | |
| FPAY | Annual fee payment | Payment date:20140515 Year of fee payment:9 | |
| PR1001 | Payment of annual fee | St.27 status event code:A-4-4-U10-U11-oth-PR1001 Fee payment year number:9 | |
| FPAY | Annual fee payment | Payment date:20150512 Year of fee payment:10 | |
| PR1001 | Payment of annual fee | St.27 status event code:A-4-4-U10-U11-oth-PR1001 Fee payment year number:10 | |
| FPAY | Annual fee payment | Payment date:20160518 Year of fee payment:11 | |
| PR1001 | Payment of annual fee | St.27 status event code:A-4-4-U10-U11-oth-PR1001 Fee payment year number:11 | |
| LAPS | Lapse due to unpaid annual fee | ||
| PC1903 | Unpaid annual fee | St.27 status event code:A-4-4-U10-U13-oth-PC1903 Not in force date:20170621 Payment event data comment text:Termination Category : DEFAULT_OF_REGISTRATION_FEE | |
| PC1903 | Unpaid annual fee | St.27 status event code:N-4-6-H10-H13-oth-PC1903 Ip right cessation event data comment text:Termination Category : DEFAULT_OF_REGISTRATION_FEE Not in force date:20170621 | |
| P22-X000 | Classification modified | St.27 status event code:A-4-4-P10-P22-nap-X000 | |
| P22-X000 | Classification modified | St.27 status event code:A-4-4-P10-P22-nap-X000 | |
| P22-X000 | Classification modified | St.27 status event code:A-4-4-P10-P22-nap-X000 |