JP7700598B2 - Fastening tool - Google Patents
Fastening toolDownload PDFInfo
- Publication number
- JP7700598B2 JP7700598B2JP2021149654AJP2021149654AJP7700598B2JP 7700598 B2JP7700598 B2JP 7700598B2JP 2021149654 AJP2021149654 AJP 2021149654AJP 2021149654 AJP2021149654 AJP 2021149654AJP 7700598 B2JP7700598 B2JP 7700598B2
- Authority
- JP
- Japan
- Prior art keywords
- guide member
- screw
- fastening tool
- driver bit
- moving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


















Landscapes
- Details Of Spanners, Wrenches, And Screw Drivers And Accessories (AREA)
Description
Translated fromJapanese本発明は、ネジにドライバビットを係合させ、ドライバビットでネジを押して締結対象物に押し付け、ドライバビットを回転させて捩じ込む締結工具に関する。The present invention relates to a fastening tool in which a driver bit is engaged with a screw, the driver bit is used to push the screw against an object to be fastened, and the driver bit is rotated to screw the screw in.
エアコンプレッサから供給される圧縮空気の空気圧や、ガスの燃焼圧を利用し、マガジンに装填された連結止め具を、ドライバガイドの先端から順次打ち出す可搬形の打込機と称す工具が知られている。There is a known tool known as a portable fastener driver that uses the air pressure of compressed air supplied by an air compressor or the combustion pressure of gas to drive connecting fasteners loaded in a magazine one by one from the tip of a driver guide.
ビットを回転させてネジを締めると共に、ネジを締める方向にビットを移動させる工具では、従来、エアモータでビットを回転させ、ネジを締める方向にはエア圧で移動させる空気圧式ネジ打ち機が提案されている(例えば、特許文献1参照)。As a tool that rotates a bit to tighten a screw and moves the bit in the direction to tighten the screw, a pneumatic screw driver has been proposed in which the bit is rotated by an air motor and moved in the direction to tighten the screw by air pressure (see, for example, Patent Document 1).
空気圧を利用した工具は、モータ等を備えていないため、制御回路等を構成する電子部品が実装される基板が不要である。一方、エアホースを接続して使用する必要があり、取り回し性が悪化する。Tools that use air pressure do not have motors or other components, so they do not require a circuit board on which electronic components that make up control circuits and the like are mounted. On the other hand, they require an air hose to be connected, which makes them difficult to handle.
これに対し、ネジを回転させるモータの駆動力でバネを圧縮し、バネの付勢でネジを打ち込むネジ打ち機が提案されている(例えば、特許文献2参照)。In response to this, a screw driver has been proposed in which a spring is compressed by the driving force of a motor that rotates the screw, and the screw is driven in by the force of the spring (see, for example, Patent Document 2).
空気圧を利用するネジ打ち機、バネの付勢でネジを打ち込むネジ打ち機のいずれも、ネジを締める方向へのドライバビットの移動量を制御することが困難である。Whether it's a screw driver that uses air pressure or a screw driver that drives the screw with spring force, it's difficult to control the amount of movement of the driver bit in the direction to tighten the screw.
また、ハンドルを手で持って使用される電動のネジ打ち機では、ハンドルの下部にバッテリが取り付けられると共に、ハンドルとバッテリの間に基板が設けられる構成が提案されている。しかし、このような構成であると、ハンドルの延伸方向に沿った工具の寸法が拡大する。In addition, for electric screw drivers that are used by holding the handle in the hand, a configuration has been proposed in which a battery is attached to the bottom of the handle and a circuit board is provided between the handle and the battery. However, with this configuration, the dimensions of the tool increase along the extension direction of the handle.
本発明は、このような課題を解決するためされたもので、ネジを締める方向へのドライバビットの移動量の制御を容易とした締結工具を提供することを目的とする。The present invention has been developed to solve these problems, and aims to provide a fastening tool that makes it easy to control the amount of movement of the driver bit in the direction of tightening the screw.
また、本発明は、ハンドルの延伸方向に沿った工具の寸法が拡大することを抑制した締結工具を提供することを目的とする。The present invention also aims to provide a fastening tool that suppresses the expansion of the tool dimensions along the extension direction of the handle.
上述した課題を解決するため、本発明は、一の方向に延伸し、軸受に回転可能に支持される筒状の回転ガイド部材と、ドライバビットが着脱可能に挿入される開口を有し、回転ガイド部材の内部を、回転ガイド部材の延伸方向に沿った軸方向に移動すると共に、回転ガイド部材と共に回転する保持部材と、保持部材を回転ガイド部材に沿って前後方向に移動させる移動部材と、モータに駆動されて回転する回転部材と、移動部材に連結されると共に、回転部材の外周に沿って巻かれる可撓性を有した伝達部材とを備え、モータにより回転部材を回転させることで、ドライバビットに係合されたネジを締結対象物に押し付ける一の方向に、伝達部材で前記移動部材を移動させる締結工具である。In order to solve the above-mentioned problems, the present invention provides a fastening tool that includes a cylindrical rotating guide member that extends in one direction and is rotatably supported by a bearing, a holding member that has an opening into which a driver bit is removably inserted and moves inside the rotating guide member in an axial direction along the extension direction of the rotating guide member and rotates together with the rotating guide member, a moving member that moves the holding member in the forward and backward directions along the rotating guide member, a rotating member that is driven to rotate by a motor, and a flexible transmission member that is connected to the moving member and is wound around the outer periphery of the rotating member, and that moves the moving member by the transmission member in one direction to press a screw engaged with the driver bit against a fastening object by rotating the rotating member by the motor.
本発明では、モータの回転量を制御することで、ドライバビットに係合されたネジを締結対象物に押し付け、ネジを締める一の方向へのドライバビットの移動量が制御される。In the present invention, the amount of movement of the driver bit in one direction to tighten the screw by pressing the screw engaged with the driver bit against the object to be fastened is controlled by controlling the amount of rotation of the motor.
本発明では、モータの回転量を制御することで、ネジを締める一の方向へのドライバビットの移動量を制御でき、ドライバビットの移動量の制御が容易である。In the present invention, the amount of movement of the driver bit in one direction for tightening the screw can be controlled by controlling the amount of rotation of the motor, making it easy to control the amount of movement of the driver bit.
以下、図面を参照して、本発明の締結工具の実施の形態について説明する。The following describes an embodiment of the fastening tool of the present invention with reference to the drawings.
<本実施の形態の締結工具の構成例>
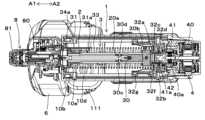
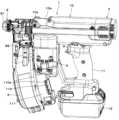
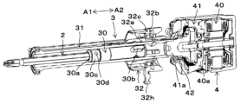
図1Aは、本実施の形態の締結工具の内部構造の一例を示す側断面図、図1Bは、本実施の形態の締結工具の内部構造の一例を示す上面断面図、図1Cは、本実施の形態の締結工具の内部構造の一例を示す正面断面図である。また、図2Aは、本実施の形態の締結工具の内部構造の一例を示す分解斜視図、図2Bは、本実施の形態の締結工具の一例を示す外観斜視図である。 <Configuration example of fastening tool according to this embodiment>
Fig. 1A is a side cross-sectional view showing an example of the internal structure of the fastening tool of this embodiment, Fig. 1B is a top cross-sectional view showing an example of the internal structure of the fastening tool of this embodiment, Fig. 1C is a front cross-sectional view showing an example of the internal structure of the fastening tool of this embodiment, Fig. 2A is an exploded perspective view showing an example of the internal structure of the fastening tool of this embodiment, and Fig. 2B is an external perspective view showing an example of the fastening tool of this embodiment.
本実施の形態の締結工具1は、ドライバビット2を回転可能、及び、軸方向に移動可能に保持するビット保持部3と、ビット保持部3で保持されたドライバビット2を回転させる第1の駆動部4と、ビット保持部3で保持されたドライバビット2を軸方向に移動させる第2の駆動部5を備える。The
また、締結工具1は、ネジ200が収納されるネジ収納部6と、ネジ収納部6に収納されたネジを送るネジ送り部7と、ネジ200が締結される締結対象物に押し付けられると共に、ネジが射出されるノーズ部8を備える。The
更に、締結工具1は、工具本体10とハンドル11を備える。また、締結工具1は、ハンドル11の端部に、バッテリ12が着脱可能に取り付けられるバッテリ取付部13を備える。Furthermore, the
締結工具1は、工具本体10が矢印A1、A2で示すドライバビット2の軸方向に沿った一の方向に延伸し、工具本体10の延伸方向に対して交差する他の方向にハンドル11が延伸する。締結工具1は、工具本体10が延伸する方向、すなわち、矢印A1、A2で示すドライバビット2の軸方向を前後方向とする。また、締結工具1は、ハンドル11が延伸する方向を上下方向とする。更に、締結工具1は、工具本体10の延伸方向及びハンドル11の延伸方向に直交する方向を左右方向とする。In the
第1の駆動部4は、ハンドル11を挟んで、工具本体10の一方の側である後方に設けられる。また、第2の駆動部5は、ハンドル11を挟んで、工具本体10の他方の側である前方に設けられる。The
ネジ収納部6は、複数のネジ200が連結帯で連結され、渦巻き状に巻かれた連結ネジが収納される。The
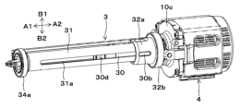
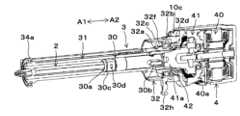
図3A、図3Bは、本実施の形態の締結工具の要部構成の一例を示す斜視図、図4A~図4Cは、本実施の形態の締結工具の要部構成の一例を示す断面斜視図、図5は、本実施の形態の締結工具の要部構成の一例を示す上面断面図であり、ビット保持部3及び第1の駆動部4の詳細を示す。次に、各図を参照して、ビット保持部3及び第1の駆動部4について説明する。Figures 3A and 3B are perspective views showing an example of the main configuration of the fastening tool of this embodiment, Figures 4A to 4C are cross-sectional perspective views showing an example of the main configuration of the fastening tool of this embodiment, and Figure 5 is a top cross-sectional view showing an example of the main configuration of the fastening tool of this embodiment, showing details of the
ビット保持部3は、ドライバビット2を着脱可能に保持する保持部材30と、保持部材30をドライバビット2の軸方向に沿った矢印A1、A2で示す前後方向へ移動可能に支持すると共に、保持部材30と共に回転する回転ガイド部材31と、保持部材30を回転ガイド部材31に沿って前後方向に移動させる移動部材32と、移動部材32を矢印A2で示す後方向へ付勢する付勢部材33を備える。 The
保持部材30は、回転ガイド部材31の内径より外径が若干小さく、回転ガイド部材31の内側に入れられる例えば円柱状の部材で構成される。保持部材30は、ドライバビット2の軸方向に沿った前側の端部に、ドライバビット2の断面形状と合致した形状の開口30aが設けられる。保持部材30は、ドライバビット2を着脱可能に保持する着脱保持機構30cを開口30aに備える。保持部材30は、開口30aが回転ガイド部材31の内側に露出し、開口30aにドライバビット2が着脱可能に挿入される。The
回転ガイド部材31は、工具本体10の延伸方向、すなわち、ドライバビット2の軸方向に沿った矢印A1、A2で示す前後方向に沿って延伸する。回転ガイド部材31は、内側に保持部材30が入る円筒形状で、前側の端部が、工具本体10の外装を構成する樹脂製のケース10aの前側に設けられる金属製の前フレーム10bに、軸受の一例であるベアリング34aを介して回転可能に支持される。また、回転ガイド部材31は、後側の端部が第1の駆動部4と連結される。The
回転ガイド部材31は、ドライバビット2の軸方向に沿った矢印A1、A2で示す前後方向に延伸する溝部31aが、径方向に対向する側部の2箇所に形成される。回転ガイド部材31は、保持部材30を径方向に貫通し、保持部材30の両側方から突出した連結部材30bが溝部31aに入ることで、連結部材30bを介して保持部材30と連結される。The
保持部材30は、ドライバビット2の回転方向に対して垂直方向に貫通した穴部が設けられ、この穴部に連結部材30bが挿入、ピン30fで固定される。連結部材30bは、断面形状が長円形状の筒状の部材で構成される。The holding
連結部材30bは、長円形状の長手方向が、矢印A1、A2で示すドライバビット2の軸方向と平行な溝部31aの延伸方向に沿った向き、長円形状の短手方向が、矢印B1、B2方向で示す溝部31aの延伸方向と直交する向き、すなわち、回転ガイド部材31の回転方向に沿った向きとなる。そして、連結部材30bは、長円形状の短手方向の幅、すなわち、回転ガイド部材31の回転方向に沿った幅が、溝部31aの同方向に沿った幅より若干小さく構成される。The longitudinal direction of the oval shape of the connecting
これにより、溝部31aに入れられた連結部材30bは、回転ガイド部材31の軸方向に沿って移動可能に溝部31aに支持される。また、連結部材30bは、回転ガイド部材31に対して回転方向に沿った移動が、溝部31aの延伸する方向に沿った溝部31aの一方の側面と他方の側面との間で規制される。よって、連結部材30bは、回転ガイド部材31が回転する動作で、回転ガイド部材31の回転方向に応じて溝部31aの一方の側面または他方の側面に押され、回転ガイド部材31から回転方向である周方向の力を受ける。As a result, the connecting
従って、保持部材30は、回転ガイド部材31が回転すると、連結部材30bが回転ガイド部材31の溝部31aに押されることで、回転ガイド部材31と共に回転する。また、保持部材30は、連結部材30bが回転ガイド部材31の溝部31aにガイドされ、ドライバビット2の軸方向に沿った前後方向に移動する。Therefore, when the
移動部材32は伝達部材の一例で、保持部材30と共に回転し、保持部材30を回転ガイド部材31に沿って前後方向に移動させる第1の移動部材32aと、ベアリング32bを介して第1の移動部材32aに支持され、ベアリング32bを介して第1の移動部材32aを押す第2の移動部材32cと、第2の移動部材32cの後側に取り付けられる緩衝部材32dを備える。The moving
第1の移動部材32aは、回転ガイド部材31の外径より内径が若干大きく、回転ガイド部材31の外側に入れられる例えば円筒状の部材で構成される。第1の移動部材32aは、回転ガイド部材31の溝部31aから突出した連結部材30bを介して保持部材30と連結されることで、回転ガイド部材31の軸方向に沿って移動可能に支持される。The first moving
ベアリング32bは軸受の一例で、第1の移動部材32aの外周と第2の移動部材32cの内周の間に挿入される。第1の移動部材32aは、ベアリング32bの内輪を保持する軸受内輪保持部材を構成し、第2の移動部材32cは、ベアリング32bの外輪を保持する軸受外輪保持部材を構成する。ベアリング32bは、内輪が第1の移動部材32aの外周に回転方向と軸方向の移動を不能に支持され、外輪が第2の移動部材32cの内周に回転方向と軸方向の移動を不能に支持される。
これにより、第2の移動部材32cは、第1の移動部材32aに対して、軸方向に沿った前後方向への移動が規制された状態で、ベアリング32bを介して連結される。また、第2の移動部材32cは、ベアリング32bを介して第1の移動部材32aを回転可能に支持する。As a result, the second moving
従って、第1の移動部材32aは、第2の移動部材32cが軸方向に沿った前後方向に移動する動作で、ベアリング32bを介して第2の移動部材32cに押され、第2の移動部材32cと共に軸方向に沿った前後方向に移動する。また、第1の移動部材32aは、回転ガイド部材31に対して非回転な第2の移動部材32cに対して回転可能である。Therefore, when the second moving
付勢部材33は、本例ではコイルバネで構成され、回転ガイド部材31の外側で、工具本体10のケース10aの前側に設けられる前フレーム10bと、移動部材32の第2の移動部材32cとの間に入れられ、ベアリング32bの外輪の端面に接触するように配置されたばね座32fに当接する。付勢部材33は、移動部材32が矢印A1で示す前方向に移動することで圧縮され、移動部材32を矢印A2で示す後方向に付勢する。The biasing
第1の駆動部4は、バッテリ12から供給される電気で駆動されるビット回転モータ40と、減速機41を備える。ビット回転モータ40は第1のモータの一例で、ビット回転モータ40の軸40aが、減速機41と連結され、減速機41の軸41aが、回転ガイド部材31に連結される。第1の駆動部4は、減速機41が遊星歯車を利用した構成で、ビット回転モータ40が回転ガイド部材31及び保持部材30と、保持部材30に保持されたドライバビット2と同軸上に配置される。The
第1の駆動部4は、工具本体10のケース10aの後側に設けられる金属製の後フレーム10cに、ビット回転モータ40及び減速機41が取り付けられ、減速機41の軸41aが、ベアリング42を介して後フレーム10cに支持される。回転ガイド部材31は、後側の端部が、減速機41の軸41aと連結され、軸41aが、ベアリング42を介して後フレーム10cに支持されることで、軸受の一例であるベアリング42を介して回転可能に支持される。The
ビット保持部3と第1の駆動部4は、前フレーム10bと後フレーム10cが、前後方向に延伸する結合部材10dで連結されることで、一体に組み立てられ、前フレーム10bが、工具本体10のケース10aにネジ10eにより固定される。The
また、ビット保持部3は、回転ガイド部材31の前側の端部が、工具本体10のケース10aの前側に固定される前フレーム10bにベアリング34aを介して支持され、回転ガイド部材31の後側の端部が、ケース10aの後側に固定される後フレーム10cに、減速機41の軸41a及びベアリング42を介して支持される。よって、ビット保持部3は、回転ガイド部材31が工具本体10に回転可能に支持される。The front end of the
これにより、第1の駆動部4は、ビット回転モータ40により回転ガイド部材31を回転させる。ドライバビット2が保持される保持部材30は、回転ガイド部材31が回転すると、連結部材30bが回転ガイド部材31の溝部31aに押されることで、回転ガイド部材31と共に回転する。As a result, the
ビット保持部3は、第2の移動部材32cにガイド部材32gが設けられる。結合部材10dは、ガイド部材32gの直径より若干大きな間隔を空けて、一対のガイド壁部10gが設けられ、一対のガイド壁部10gの間にガイド部材32gが入ることで、一対のガイド壁部10gがガイド部材32gの周面と対向する。The
これにより、第2の移動部材32cは、ガイド部材32gが結合部材10dにガイドされることで、ドライバビット2の軸方向に沿った矢印A1、A2で示す前後方向に移動可能で、かつ、回転ガイド部材31に追従した回転が規制される。As a result, the second moving
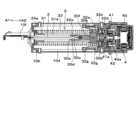
図6A及び図6Bは、本実施の形態の締結工具の内部構造の一例を示す上面断面図であり、第2の駆動部5の詳細を示す。次に、各図を参照して、第2の駆動部5について説明する。Figures 6A and 6B are top cross-sectional views showing an example of the internal structure of the fastening tool of this embodiment, showing details of the
第2の駆動部5は、バッテリ12から供給される電気で駆動されるビット移動モータ50と、減速機51を備える。ビット移動モータ50はモータ、第2のモータの一例で、ビット移動モータ50の軸50aが、減速機51と連結され、減速機51の軸51aが回転部材の一例であるプーリ52と連結される。第2の駆動部5は、プーリ52がベアリング53を介して工具本体10に支持される。第2の駆動部5は、ビット移動モータ50の軸50aがハンドル11の延伸方向に沿って配置される。The
第2の駆動部5は、伝達部材の一例である線状のワイヤ54の一端がプーリ52に連結され、プーリ52が回転することでワイヤ54がプーリ52の外周52aに沿って巻かれる。また、ワイヤ54の他端が、移動部材32の第2の移動部材32cに設けたワイヤ連結部32hに連結される。伝達部材は、プーリ52等の回転部材の外周に沿って巻かれる可撓性を有したものであれば、繊維等で構成される紐、ゴム等で構成されるベルト、金属等で構成されるチェーンでも良い。伝達部材がチェーンで構成される場合、回転部材は歯部を有したスプロケットでも良い。In the
これにより、第2の駆動部5は、ビット移動モータ50によりプーリ52を回転させて、ワイヤ54を巻き取ることで、第2の移動部材32cを矢印A1で示す前方向に移動させる。ビット保持部3は、第2の移動部材32cが前方向に移動することで、ベアリング32bを介して第1の移動部材32aが押され、第1の移動部材32aが第2の移動部材32cと共に軸方向に沿った前方向に移動する。第1の移動部材32aが前方向に移動することで、第1の移動部材32aと連結部材30bを介して連結された保持部材30が前方向に移動し、保持部材30で保持されたドライバビット2が、矢印A1で示す前方向に移動する。As a result, the
第2の駆動部5は、プーリ52においてワイヤ54が巻かれる部位の接線方向が、回転ガイド部材31の延伸方向に沿うように、締結工具1の左右方向における略中心に対し一方の側にオフセットされて配置される。すなわち、プーリ52の中心、本例では、ビット移動モータ50の軸50aが、回転ガイド部材31に対して一方の側にオフセットされ、プーリ52の軸方向から見て、プーリ52においてワイヤ54が巻かれる外周52aが、回転ガイド部材31と重なる配置である。The
また、プーリ52と第2の移動部材32cとの間のワイヤ54は、図6A,図6Bに示すように、プーリ52の径方向において、回転ガイド部材31の軸方向と平行となり、かつ、図1Aに示すように、プーリ52の径方向と直交するビット移動モータ50の軸方向においても、回転ガイド部材31の軸方向と平行となるように、プーリ52等が配置される。The
更に、プーリ52にワイヤ54が重ねて巻かれると、巻き数に応じてプーリ52の中心からワイヤ54までの距離が変化することから、プーリ52が1回転したときのドライバビット2の移動量が変化する。また、プーリ52と第2の移動部材32cとの間でワイヤ54が延伸する方向と、回転ガイド部材31の軸方向に沿ったドライバビット2の移動方向との成す角度が変化する。Furthermore, when the
そこで、移動部材32を、一の方向に沿った移動可能範囲内で一方の端部から他方の端部まで移動させることで、ドライバビット2を所定量移動させるために必要なプーリ52の回転量αが、360°未満となるように、プーリ52の径等が設定される。Therefore, the diameter, etc. of the
これにより、ドライバビット2を所定量移動させるために、プーリ52がワイヤ54を巻き取る動作で、図6Bに示すように、プーリ52にワイヤ54が重ねて巻かれることがなく、ドライバビット2の移動量が不正確になることが抑制される。また、プーリ52と第2の移動部材32cとの間でワイヤ54が延伸する方向と、回転ガイド部材31の軸方向に沿ったドライバビット2の移動方向との平行度の変化が抑制される。As a result, when the
従って、ビット移動モータ50の回転量と、保持部材30の移動量との関係が、保持部材30の移動可能範囲の全域において、1対1の関係となり、ビット移動モータ50の回転量を制御することで、回転ガイド部材31の軸方向に沿った保持部材30の移動量を制御できる。すなわち、ビット移動モータ50の回転量を制御することで、保持部材30に取り付けられたドライバビット2の移動量を制御可能となる。Therefore, the relationship between the amount of rotation of the
また、ワイヤ54の巻き取り量に関わらず、ワイヤ54に掛かる張力は回転ガイド部材31の軸方向に沿ったドライバビット2の移動方向と常に平行になり、ドライバビット2の移動及びドライバビット2を介してネジ200を押すための力の伝達効率の低下を抑制できる。In addition, regardless of the amount of winding of the
これにより、プーリ52と第2の移動部材32cとの間のワイヤ54が、移動部材32の移動方向に沿った直線状に延伸し、プーリ52でワイヤ54を巻き取る際の負荷の増加、プーリ52からワイヤ54が引き出される際の負荷の増加が抑制される。As a result, the
なお、ワイヤ54は、プーリ52に巻き取ることが可能な可撓性を有することから、第2の移動部材32cを押して移動部材32を後方へ移動させることができない。そこで、移動部材32が矢印A1で示す前方向に移動することで圧縮され、移動部材32を矢印A2で示す後方向に押す力を移動部材32に掛ける付勢部材33を備える。これにより、プーリ52でワイヤ54を巻き取り、ドライバビット2を前進させる構成で、前進後のドライバビット2を後進させることができる。The
また、ドライバビット2を保持する保持部材30は、保持部材30に設けた連結部材30bと、回転ガイド部材31に設けた溝部31aとの係合で、回転ガイド部材31に対して前後方向に移動可能に支持されると共に、回転ガイド部材31と共に回転する。The holding
よって、ビット回転モータ40が回転ガイド部材31及び保持部材30と、保持部材30に保持されたドライバビット2と同軸上に配置される構成で、ビット回転モータ40を前後方向に移動させることなく、ドライバビット2を回転させると共に、ドライバビット2を前後方向に移動させる構成を実現することができる。Therefore, the
なお、ビット回転モータ40をドライバビット2と同軸上に配置する構成では、送りネジを利用して、ビット回転モータ40の回転動作を、ドライバビット2の前後方向への移動に変換する構成が考えられる。In a configuration in which the
しかし、送りネジを利用した構成では、モータ1回転あたりのドライバビット2の前進量を大きく取れないことから、モータの回転速度を上げても、ドライバビット2の移動速度を速くすることが難しい。However, with a configuration that uses a feed screw, the amount of advancement of the
締結工具1では、ドライバビット2でネジ200を締結対象物に押し付けるまでの時間を短縮するため、ドライバビット2の移動速度を速くする必要があるが、送りネジを利用した構成では、ドライバビット2でネジ200を締結対象物に押し付けるまでの時間を短縮することが難しい。In the
これに対し、ドライバビット2を保持する保持部材30が、回転ガイド部材31に対して前後方向に移動可能に支持され、第2の駆動部5によりプーリ52を回転させてワイヤ54を巻き取り、保持部材30を前方向に移動させる構成では、ビット移動モータ50の回転速度に応じて、ドライバビット2の移動速度を速くすることができる。よって、ドライバビット2でネジ200を締結対象物に押し付けるまでの時間を短縮することができる。In contrast, in a configuration in which the holding
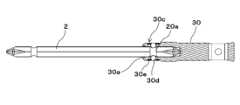
図7A、図7Bは、着脱保持機構の一例を示す断面図、図8A、図8Bは、着脱保持機構の一例を示す斜視図であり、着脱保持機構30cの詳細を示す。次に、各図を参照して、着脱保持機構30cについて説明する。Figures 7A and 7B are cross-sectional views showing an example of a detachable holding mechanism, and Figures 8A and 8B are perspective views showing an example of a detachable holding mechanism, showing details of the
着脱保持機構30cは、開口30a内に露出するボール30dと、ボール30dを開口30a内に露出する方向に押圧するバネ30eを備える。バネ30eは押圧部材の一例で、板バネ、コイル等の付勢部材、ゴム等の弾性部材で構成され、本例では、環状の板バネで構成され、保持部材30の外周に嵌められる。The
ドライバビット2の差込み部20が、保持部材30の開口30aに挿入されると、着脱保持機構30cは、差込み部20に押されたボール30dが、環状のバネ30eの径が大きくなる方向にバネ30eを変形させながら、保持部材30の外周方向へ退避する。When the
差込み部20の外周に形成された溝部20aが、ボール30dと対向する位置まで、ドライバビット2の差込み部20が保持部材30の開口30aに挿入されると、バネ30eで付勢されたボール30dが溝部20aに嵌る。これにより、ドライバビット2が保持部材30から不用意に抜けることが抑制される。When the
また、ドライバビット2を保持部材30から抜く方向に所定以上の力が掛かると、環状のバネ30eの径が大きくなる方向にバネ30eを変形させながら、ボール30dが退避することで、ドライバビット2を保持部材30から抜くことが可能である。In addition, when a force greater than a predetermined value is applied in the direction of removing the
ドライバビット2の差込み部20が、保持部材30の開口30aに挿抜される動作では、ボール30dが保持部材30の外周方向へ退避する。このため、保持部材30の外周に、ボール30dが退避する空間が必要となる。一方、保持部材30は、筒状の回転ガイド部材31の内部に挿入されており、保持部材30の外周と回転ガイド部材31の内周の間には、ボール30dが退避する空間を確保できない。When the
また、保持部材30の外周と回転ガイド部材31の内周の間に、ボール30dが退避する空間を確保するため、保持部材30と回転ガイド部材31との径差を設定すると、ドライバビット2の径方向の寸法が決められていることで、保持部材30の外径を小さくできないことから、回転ガイド部材31の外径を大きくする必要がある。このため、装置が大型化する。In addition, if a diameter difference between the holding
これに対し、回転ガイド部材31は、連結部材30bをガイドする溝部31aが設けられる。溝部31aは、回転ガイド部材31の内周側から外周側へ表裏貫通しており、回転ガイド部材31の軸方向に延伸する。In response to this, the
そこで、着脱保持機構30cは、ボール30dが、回転ガイド部材31の溝部31aの位置に合わせて設けられる。すなわち、保持部材30は、連結部材30bと、着脱保持機構30cのボール30dが、回転ガイド部材31の軸方向に沿った同軸上に設けられる。これにより、着脱保持機構30cは、回転ガイド部材31及び保持部材30が回転する動作、保持部材30が回転ガイド部材31に対して軸方向に移動する動作の何れでも、ボール30dが回転ガイド部材31の溝部31aに露出する。The
従って、ドライバビット2の差込み部20が、保持部材30の開口30aに挿抜される動作で、保持部材30の外周方向へ退避するボール30dが、回転ガイド部材31の溝部31aに入る。Therefore, when the
よって、筒状の回転ガイド部材31の内部に保持部材30が挿入される構成で、着脱保持機構30cのボール30dが退避する空間を確保できる。また、連結部材30bが入る溝部31aを、ボール30dが退避する空間として兼用することで、回転ガイド部材31に設けられる開口の面積が抑制され、強度を確保できる。Therefore, the holding
更に、保持部材30と回転ガイド部材31との径差を大きくして、保持部材30の外周と回転ガイド部材31の内周の間に、ボール30dが退避する空間を確保する必要がなく、装置の大型化を抑制できる。Furthermore, by increasing the diameter difference between the holding
図9は、本実施の形態のネジ送り部及びノーズ部の一例を示す斜視図であり、ネジ送り部7及びノーズ部8の詳細を示す。次に、各図を参照して、ネジ送り部7及びノーズ部8について説明する。Figure 9 is a perspective view showing an example of the screw feed section and nose section of this embodiment, showing details of the
ネジ送り部7は、ネジ送りモータ70と、ネジ送りモータ70の軸に減速機を介して取り付けられるピニオンギア71と、ピニオンギア71と噛み合うラックギア72と、ラックギア72と連結され、ネジ収納部6から送られる連結ネジと係合する係合部73を備える。The
ネジ送り部7は、ラックギア72が、連結ネジの送り方向に沿った上下方向に移動可能に支持される。ネジ送り部7は、ネジ送りモータ70が正転及び逆転することで、連結ネジと係合する係合部73が上下方向に移動し、連結ネジが送られる。The
ノーズ部8は、ネジ送り部7によりネジ200が供給されると共に、ドライバビット2が通る射出通路80と、射出通路80と連通する射出口81aを有し、締結対象物に接触するコンタクト部材81と、コンタクト部材81と連動して前後方向に移動するコンタクトアーム82と、コンタクトアーム82の移動量を規制する調整部83を備える。また、ノーズ部8は、ネジ収納部6から射出通路80までのネジ200が通る経路を開閉可能に覆うカバー部材88を備える。The
締結工具1は、射出通路80、コンタクト部材81及びコンタクトアーム82を構成する各部品が組み立てられてノーズ部8が構成され、工具本体10を構成する前フレーム10b及びノーズ本体部10fに固定される。また、締結工具1は、コンタクトアーム82に押されて作動するコンタクトスイッチ部84を備える。The
ノーズ部8は、コンタクト部材81が矢印A1、A2で示す前後方向に移動可能に支持され、コンタクト部材81と連動してコンタクトアーム82が前後方向に移動する。ノーズ部8は、コンタクト部材81が図示しない付勢部材で前方向に付勢され、締結対象物に押し付けられて後方に移動したコンタクト部材81が、付勢部材で付勢されて前方向に移動する。The
ノーズ部8は、コンタクト部材81が締結対象物に押し付けられてコンタクトアーム82が後方へ移動し、コンタクトスイッチ部84が作動するまでのコンタクトアーム82の移動量が調整部83で調整される。コンタクトスイッチ部84は、コンタクトアーム82に押されることで作動の有無が切り替えられ、本例では、コンタクトアーム82に押されておらず、コンタクトスイッチ部84が非作動な状態をコンタクトスイッチ部84のオフ、コンタクトアーム82に押されてコンタクトスイッチ部84が作動した状態をコンタクトスイッチ部84のオンとする。In the
次に、各図を参照して、締結工具1の制御及び操作に関する構成について説明する。締結工具1は、操作を受けるトリガ9と、トリガ9の操作で作動するトリガスイッチ部90を備える。トリガ9は、ハンドル11の前側に設けられ、ハンドル11を把持する手の指で操作可能に構成される。トリガスイッチ部90は、トリガ9に押されて作動する。Next, the configuration related to the control and operation of the
トリガスイッチ部90は、トリガ9に押されることで作動の有無が切り替えられ、本例では、トリガ9が操作されておらず、トリガ9でトリガスイッチ部90が押されずトリガスイッチ部90が非作動な状態をトリガスイッチ部90のオフ、トリガ9が操作され、トリガ9に押されてトリガスイッチ部90が作動した状態をトリガスイッチ部90のオンとする。The
締結工具1は、トリガ9の操作で作動するトリガスイッチ部90及びコンタクト部材81に押されて作動するコンタクトスイッチ部84の出力に基づき、第1の駆動部4、第2の駆動部5及びネジ送り部7を制御する制御部100を備える。The
制御部100は、各種電子部品が実装された基板で構成され、ネジ収納部6とハンドル11との間で、ネジ収納部6の裏面側に設けた基板収納部111に設けられる。The
ハンドルを手で持って使用される電動工具では、ネジ等の消耗品が収納される収納部が、ハンドルの前方に設けられる。そして、ハンドルを手で把持できるようにするため、ハンドルと収納部の間には、手の指が入る空間が必要である。In power tools that are used by holding the handle in the hand, a storage section for storing consumables such as screws is provided in front of the handle. In order to be able to grip the handle with the hand, there needs to be space between the handle and the storage section large enough for the fingers to fit in.
そこで、締結工具1は、ネジ収納部6とハンドル11との間の空間を利用して、ネジ収納部6の裏面側に基板収納部111を備える。Therefore, the
ハンドルを手で持って使用される電動工具では、ハンドルの下部にバッテリが取り付けられると共に、ハンドルとバッテリの間に基板が設けられる構成が提案されている。このような構成であると、ハンドルの延伸方向に沿った電動工具の上下方向の寸法が拡大する。For power tools that are used by holding the handle in the hand, a configuration has been proposed in which a battery is attached to the bottom of the handle and a circuit board is provided between the handle and the battery. With this configuration, the vertical dimension of the power tool increases along the extension direction of the handle.
これに対し、ネジ収納部6の裏面側に基板収納部111を備えることで、ハンドル11の延伸方向に沿った締結工具1の上下方向の寸法が拡大することが抑制される。また、ネジ収納部6は、渦巻き状に巻かれた連結ネジが収納されるため、ネジ収納部6においてハンドル11と対向する面は略円形である。これにより、締結工具1の大型化を抑制しながら、基板収納部111の容積を確保できる。In response to this, by providing the
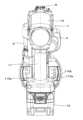
図10A~図10Cは、本実施の形態の締結工具の一例を示す後方から見た斜視図、図11は、設定部の一例を示す斜視図であり、設定部110の詳細を示す。次に、各図を参照して、設定部110について説明する。Figures 10A to 10C are perspective views from the rear showing an example of a fastening tool according to this embodiment, and Figure 11 is a perspective view showing an example of a setting section, showing details of setting
締結工具1は、ドライバビット2を軸方向に沿った前後方向に移動させる第2の駆動部5を備え、第2の駆動部5がビット移動モータ50で駆動され、ビット移動モータ50で駆動されて回転するプーリ52とワイヤ54で連結された移動部材32及び移動部材32と連結された保持部材30が、回転ガイド部材31に沿って、ドライバビット2の軸方向に沿った前方向に移動する構成である。The
これにより、ビット移動モータ50の回転量を制御することで、ドライバビット2の移動量(前進量)を制御できる。すなわち、ネジ200を締結する方向にドライバビット2を回転させるビット回転モータ40の回転に連動して、ビット移動モータ50を回転させることで、ネジ200の締結に伴い、ネジ200に追従して前進させるドライバビット2の前進量を、ビット移動モータ50の回転量で制御して、ドライバビット2の軸方向に沿った停止位置を制御できる。As a result, the amount of movement (advancement) of the
そこで、締結工具1は、ドライバビット2の前進量を設定する設定部110を備える。設定部110は設定手段の一例で、複数の設定値の中から任意の設定値が選択可能、または、任意の設定値が無段階で選択可能に構成される。The
設定部110は、本例では、ボタンで構成される操作部110aで設定値が選択される構成である。また、操作部110aは、回転式のダイヤルで設定値が選択される構成でも良い。また、設定部110は、現在の設定値を作業者が容易に把握できるよう、ラベルや刻印等で現在値を示す方法や、LED等の表示部110bで現在値を示す方法等により、選択された設定値を表示する構成を備えても良い。In this example, the
設定部110は、ネジ収納部6の裏面側に設けた基板収納部111において、ハンドル11と対向する側の面の左右両側にそれぞれ設けられる。The
これにより、締結工具1を後方からみた場合に、ハンドル11の左右両側から設定部110を視認することが可能である。This makes it possible to see the
ハンドル11を手で持つ使用形態では、ネジ収納部6のハンドル11と対向する側の面が、締結工具1を持つ作業者に向く。これにより、ネジ収納部6の裏面側に設けた基板収納部111において、ハンドル11と対向する側の面に設定部110を備えることで、設定部110に設けた表示部110bが視線に入りやすい。よって、作業者が表示を見逃す可能性を低減できる。なお、表示部110bに表示される内容としては、ドライバビット2の前進量で規定されるネジ深さの設定値に加え、電源のON/OFFの状態、選択可能な各種運転モードの中から選択された運転モード、ネジの有無、ネジの残量、異常の有無等である。When the
また、ハンドル11を手で持つ使用形態で、設定部110に設けたボタン等の操作部110aも視線に入りやすい。よって、一方の手でハンドル11を持った状態で、操作部110aを視認しながら、もう一方の手で操作部110aを操作でき、操作を確実にできる。更に、作業中に姿勢を変えたり、目線を大きく変えることなく表示部110bを見ることができ、これにより、連続作業中に警報等の報知に気付かないことを防ぐことができる。また、作業者が表示部110bや操作部110aを注視しようとして、無意識に射出口81aが作業者に向くことを防ぐことができる。In addition, when the
更に、基板収納部111には、制御部100を構成する基板が収納されている。この基板において、ハンドル11と対向する側の面に、操作部110aを構成するスイッチ類等、表示部110bを構成するランプ類等を実装することで、制御部100とは別に、設定部110用の基板を省略できる。Furthermore, the
<本実施の形態の締結工具の動作例>
図12Aは、本実施の形態の締結工具の動作の一例を示す側断面図、図12Bは、本実施の形態の締結工具の動作の一例を示す上面断面図であり、次に、各図を参照して、本実施の形態の締結工具の締結動作について説明する。 <Operation example of the fastening tool according to the present embodiment>
FIG. 12A is a side cross-sectional view showing an example of the operation of the fastening tool of the present embodiment, and FIG. 12B is a top cross-sectional view showing an example of the operation of the fastening tool of the present embodiment. Next, the fastening operation of the fastening tool of the present embodiment will be described with reference to each figure.
締結工具1は、待機状態では、図1Aに示すように、ドライバビット2の先端が、射出通路80の後方の待機位置P1に位置し、射出通路80にネジ200を供給可能である。When the
制御部100は、コンタクト部材81が締結対象物に押し付けられ、コンタクトアーム82によりコンタクトスイッチ部84が押されてコンタクトスイッチ部84がオンとなり、トリガ9が操作されてトリガスイッチ部90がオンになると、第2の駆動部5のビット移動モータ50を駆動すると共に、所定のタイミングで、第1の駆動部4のビット回転モータ40を駆動する。When the
ビット移動モータ50が駆動されて一の方向である正方向に回転すると、プーリ52が正方向に回転することでワイヤ54がプーリ52に巻き取られる。プーリ52にワイヤ54が巻き取られることで、ワイヤ54と連結された第2の移動部材32cが、回転ガイド部材31にガイドされ軸方向に沿った前方向に移動する。第2の移動部材32cが前方向に移動すると、第1の移動部材32aがベアリング32bを介して第2の移動部材32cに押され、第2の移動部材32cと共に、付勢部材33を圧縮しながら軸方向に沿った前方向に移動する。When the
第1の移動部材32aが前方向に移動すると、第1の移動部材32aと連結部材30bで連結された保持部材30が、回転ガイド部材31の溝部31aに連結部材30bがガイドされて、ドライバビット2の軸方向に沿った前方向に移動する。When the first moving
これにより、保持部材30に保持されたドライバビット2が矢印A1で示す前方向に移動し、ノーズ部8の射出通路80に供給されたネジ200と係合してネジ200を前方向に移動させ、締結対象物に押し付ける。 As a result, the
ビット回転モータ40が駆動されて一の方向である正方向に回転すると、回転ガイド部材31が正方向に回転する。回転ガイド部材31が正方向に回転すると、保持部材30と連結された連結部材30bが回転ガイド部材31の溝部31aに押されることで、保持部材30が回転ガイド部材31と共に回転する。When the
これにより、保持部材30に保持されたドライバビット2がネジ200を正方向(時計回り)に回転させ、締結対象物にねじ込む。制御部100は、第1の駆動部4でドライバビット2を回転させてネジを締結対象物にねじ込む動作に連動させて、ビット回転モータ40に掛かる負荷、ビット回転モータ40の回転数、ビット移動モータ50に掛かる負荷、ビット移動モータ50の回転数等に基づき、第2の駆動部5でドライバビット2を前方向に移動させることで、締結対象物にねじ込まれるネジにドライバビット2を追従させる。As a result, the
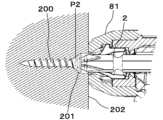
制御部100は、図12A、図12Bに示すように、ドライバビット2の先端が、コンタクト部材81の射出口81aから突出し、所定の作動終了位置P2に到達すると、ビット回転モータ40の駆動を停止すると共に、ビット移動モータ50を逆転させる。制御部100は、ビット移動モータ50の回転数に基づき、ドライバビット2の先端が作動終了位置P2に到達したと判断する。As shown in Figures 12A and 12B, when the tip of the
ビット移動モータ50が他の方向である逆方向に回転すると、プーリ52が逆方向に回転することでワイヤ54がプーリ52から引き出される。ワイヤ54がプーリ52から引き出されることで、第2の移動部材32cが前方向に移動することで圧縮されていた付勢部材33が伸び、第2の移動部材32cを後方向に押す。When the
第2の移動部材32cは、付勢部材33により後方向に押されることで、回転ガイド部材31にガイドされ軸方向に沿った後方向に移動する。第2の移動部材32cが後方向に移動すると、第1の移動部材32aがベアリング32bを介して第2の移動部材32cに引かれ、第2の移動部材32cと共に軸方向に沿った後方向に移動する。The second moving
第1の移動部材32aが後方向に移動すると、第1の移動部材32aと連結部材30bで連結された保持部材30が、回転ガイド部材31の溝部31aに連結部材30bがガイドされて、ドライバビット2の軸方向に沿った後方向に移動する。When the first moving
これにより、保持部材30に保持されたドライバビット2が後方向に移動し、ドライバビット2の先端が、待機位置P1に戻る。なお、移動部材32は、第2の移動部材32cの後側にゴム等による緩衝部材32dを備えることで、第2の移動部材32cが後方向に移動する動作で、第2の移動部材32cが直接後フレーム10cに当たることが抑制され、音の発生や損傷を抑制することができる。制御部100は、第2の移動部材32cが付勢部材33により後方向に押され、ドライバビット2の先端が待機位置P1に戻ると、ビット移動モータ50の回転を停止させる。制御部100は、トリガスイッチ部90がオフになると、ネジ送りモータ70を一の方向に回転させることで、係合部73を下降させる。係合部73が次のネジ200と係合する位置まで下降すると、制御部100は、ネジ送りモータ70を逆転させることで、係合部73を上昇させ、次のネジ200を射出通路80に供給する。 As a result, the
図13A~図13Cは、ネジの締結状態を示す断面図で、図13Aは、ネジ200の頭部201が、締結対象物202の表面から浮き上がったり埋まったりしない所謂面一な状態、図13Bは、ネジ200の頭部201が、締結対象物202から浮いた状態、図13Cは、ネジ200の頭部201が、締結対象物202に埋まった状態を示す。Figures 13A to 13C are cross-sectional views showing the fastening state of the screw. Figure 13A shows the
締結工具1は、ドライバビット2の先端が作動終了位置P2に到達したとき、ネジ200が皿ネジである場合、図13Aに示すように、ネジ200の頭部201の表面が、締結対象物202の表面と同一となる所謂面一な状態となるように、ドライバビット2の前進量が設定されていることが好ましい。なお、ネジ200は皿ネジに限らず、なべ、バインド、トラス等であれば、ネジ200の頭部201の座面が、締結対象物202の表面と接して、ネジ200の頭部201が締結対象物202から浮いた状態とならないように、ドライバビット2の前進量が設定されていることが好ましい。When the tip of the
ドライバビット2の先端が作動終了位置P2に到達したとき、ネジ200の頭部201が、図13Bに示すように締結対象物202から浮いた状態である場合、ドライバビット2の前進量を増加させて、作動終了位置P2を前進させればよい。一方、ネジ200の頭部201が、図13Cに示すように締結対象物202に埋まった状態である場合、ドライバビット2の前進量を減少させて、作動終了位置P2を後退させればよい。When the tip of the
そこで、ドライバビット2の移動量(前進量)を設定部110で設定可能とする。ドライバビット2の移動量(前進量)は、ビット移動モータ50の回転数(回転量)で規定される。そして、ドライバビット2の初期位置である待機位置P1を起点として、設定された回転量だけビット移動モータ50を回転させた後、ビット移動モータ50を回転停止または逆転させることで、作動終了位置P2が制御される。よって、締め込む深さを調整することができる。The amount of movement (advancement) of the
1・・・締結工具、10・・・工具本体、10a・・・ケース、10b・・・前フレーム、10c・・・後フレーム、10d・・・結合部材、10e・・・ネジ、10f・・・ノーズ本体部、11・・・ハンドル、12・・・バッテリ、13・・・バッテリ取付部、2・・・ドライバビット、3・・・ビット保持部、30・・・保持部材、30a・・・開口、30b・・・連結部材、31・・・回転ガイド部材、31a・・・溝部、32・・・移動部材、32a・・・第1の移動部材、32b・・・ベアリング(軸受)、32c・・・第2の移動部材、33・・・付勢部材、34a・・・ベアリング(軸受)、4・・・第1の駆動部、40・・・ビット回転モータ(第1のモータ)、40a・・・軸、41・・・減速機、41a・・・軸、42・・・ベアリング(軸受)、5・・・第2の駆動部、50・・・ビット移動モータ(モータ、第2のモータ)、50a・・・軸、51・・・減速機、51a・・・軸、52・・・プーリ(回転部材)、52a・・・外周、53・・・ベアリング、54・・・ワイヤ(伝達部材)、6・・・ネジ収納部、7・・・ネジ送り部、70・・・ネジ送りモータ、71・・・ピニオンギア、72・・・ラックギア、73・・・係合部、8・・・ノーズ部、80・・・射出通路、81・・・コンタクト部材、81a・・・射出口、82・・・コンタクトアーム、83・・・調整部、84・・・コンタクトスイッチ部、9・・・トリガ、90・・・トリガスイッチ部、100・・・制御部、110・・・設定部1: Fastening tool, 10: Tool body, 10a: Case, 10b: Front frame, 10c: Rear frame, 10d: Connecting member, 10e: Screw, 10f: Nose body, 11: Handle, 12: Battery, 13: Battery attachment section, 2: Driver bit, 3: Bit holding section, 30: Holding member, 30a: Opening, 30b: Connecting member, 31: Rotation guide member, 31a: Groove section, 32: Moving member, 32a: First moving member, 32b: Bearing, 32c: Second moving member, 33: Pressing member, 34a: Bearing, 4: First driving section, 40: Bit rotation motor (first motor), 40a: Shaft, 41: Reducer , 41a...shaft, 42...bearing (bearing), 5...second drive unit, 50...bit moving motor (motor, second motor), 50a...shaft, 51...reduction gear, 51a...shaft, 52...pulley (rotating member), 52a...periphery, 53...bearing, 54...wire (transmission member), 6...screw storage unit, 7...screw feed unit, 70...screw feed motor, 71...pinion gear, 72...rack gear, 73...engagement unit, 8...nose unit, 80...ejection passage, 81...contact member, 81a...ejection port, 82...contact arm, 83...adjustment unit, 84...contact switch unit, 9...trigger, 90...trigger switch unit, 100...control unit, 110...setting unit
Claims (6)
Translated fromJapaneseドライバビットが着脱可能に挿入される開口を有し、前記回転ガイド部材の内部を、前記回転ガイド部材の延伸方向に沿った軸方向に移動すると共に、前記回転ガイド部材と共に回転する保持部材と、
前記保持部材を前記回転ガイド部材に沿って前後方向に移動させる移動部材と、
モータに駆動されて回転する回転部材と、
前記移動部材に連結されると共に、前記回転部材の外周に沿って巻かれる可撓性を有した伝達部材とを備え、
前記モータにより前記回転部材を回転させることで、前記ドライバビットに係合されたネジを締結対象物に押し付ける一の方向に、前記伝達部材で前記移動部材を移動させる
締結工具。 A cylindrical rotation guide member extending in one direction and rotatably supported by a bearing;
a holding member having an opening into which a driver bit is detachably inserted, the holding member moving within the rotary guide member in an axial direction along the extension direction of the rotary guide member and rotating together with the rotary guide member;
a moving member that moves the holding member in a front-rear direction along the rotation guide member;
A rotating member that is driven to rotate by a motor;
a flexible transmission member that is connected to the moving member and that is wound around an outer periphery of the rotating member,
The fastening tool comprises a fastening member configured to rotate the rotating member by the motor, and to move the moving member by the transmission member in one direction for pressing the screw engaged with the driver bit against an object to be fastened.
請求項1に記載の締結工具。 The fastening tool according to claim 1 , wherein the transmission member extends in a direction parallel to an extending direction of the rotation guide member.
請求項1または請求項2に記載の締結工具。 The fastening tool according to claim 1 or 2, wherein the center of the rotating member is offset to one side with respect to the rotating guide member, and the outer periphery of the rotating member around which the transmission member is wound overlaps with the rotating guide member when viewed in the axial direction of the rotating member.
請求項1~請求項3の何れか1項に記載の締結工具。 The fastening tool according to any one of claims 1 to 3, wherein a shaft of the motor is offset to one side with respect to the rotation guide member.
請求項1~請求項4の何れか1項に記載の締結工具。 The fastening tool according to any one of claims 1 to 4, wherein an amount of rotation of the rotatingmember required to move the movable member from one end to the other end within a movable range along one direction is less than 360°.
請求項1~請求項5の何れか1項に記載の締結工具。 The fastening tool according to any one of claims 1 to 5, further comprising a biasing member that is compressed by the movement of the moving member in one direction in which the screw engaged with the driver bit is pressed against an object to be fastened, and biases the moving member in another direction opposite to the one direction.
Priority Applications (32)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021149654AJP7700598B2 (en) | 2021-09-14 | 2021-09-14 | Fastening tool |
| AU2022201528AAU2022201528A1 (en) | 2021-03-04 | 2022-03-04 | Fastening tool |
| US17/686,981US12186843B2 (en) | 2021-03-04 | 2022-03-04 | Fastening tool |
| CN202210213186.3ACN115008394A (en) | 2021-03-04 | 2022-03-04 | Fastening tool |
| US17/687,206US12214457B2 (en) | 2021-03-04 | 2022-03-04 | Fastening tool |
| TW111107917ATW202300256A (en) | 2021-03-04 | 2022-03-04 | fastening tool |
| TW111107922ATW202300259A (en) | 2021-03-04 | 2022-03-04 | fastening tool |
| AU2022201520AAU2022201520A1 (en) | 2021-03-04 | 2022-03-04 | Fastening tool |
| US17/687,099US20220281088A1 (en) | 2021-03-04 | 2022-03-04 | Fastening tool |
| EP22160121.4AEP4104973B1 (en) | 2021-03-04 | 2022-03-04 | Fastening tool |
| ES22160119TES2983016T3 (en) | 2021-03-04 | 2022-03-04 | Fixing tool |
| CN202210213315.9ACN115008395A (en) | 2021-03-04 | 2022-03-04 | Fastening tool |
| AU2022201529AAU2022201529A1 (en) | 2021-03-04 | 2022-03-04 | Fastening tool |
| TW111107920ATW202300258A (en) | 2021-03-04 | 2022-03-04 | fastening tool |
| CN202210212064.2ACN115091397A (en) | 2021-03-04 | 2022-03-04 | Fastening tool |
| EP22160138.8AEP4052852A1 (en) | 2021-03-04 | 2022-03-04 | Fastening tool |
| US17/687,365US20220281083A1 (en) | 2021-03-04 | 2022-03-04 | Fastening tool |
| AU2022201526AAU2022201526A1 (en) | 2021-03-04 | 2022-03-04 | Fastening tool |
| TW111107916ATW202302285A (en) | 2021-03-04 | 2022-03-04 | fastening tool |
| US17/687,447US12186844B2 (en) | 2021-03-04 | 2022-03-04 | Fastening tool |
| EP22160134.7AEP4052851A1 (en) | 2021-03-04 | 2022-03-04 | Fastening tool |
| US17/687,033US20220281084A1 (en) | 2021-03-04 | 2022-03-04 | Fastening tool |
| TW111107919ATW202300257A (en) | 2021-03-04 | 2022-03-04 | fastening tool |
| TW111107915ATW202300255A (en) | 2021-03-04 | 2022-03-04 | fastening tool |
| EP24166431.7AEP4364893A3 (en) | 2021-03-04 | 2022-03-04 | Fastening tool |
| CN202210212510.XACN115008393A (en) | 2021-03-04 | 2022-03-04 | Fastening tool |
| EP22160123.0AEP4052849A1 (en) | 2021-03-04 | 2022-03-04 | Fastening tool |
| CN202210213540.2ACN115008396A (en) | 2021-03-04 | 2022-03-04 | Fastening tool |
| EP22160125.5AEP4052850A1 (en) | 2021-03-04 | 2022-03-04 | Fastening tool |
| EP22160119.8AEP4052848B1 (en) | 2021-03-04 | 2022-03-04 | Fastening tool |
| CN202210212163.0ACN115008392A (en) | 2021-03-04 | 2022-03-04 | Fastening tool |
| JP2025064715AJP2025096493A (en) | 2021-09-14 | 2025-04-10 | Fastening tool |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021149654AJP7700598B2 (en) | 2021-09-14 | 2021-09-14 | Fastening tool |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2025064715ADivisionJP2025096493A (en) | 2021-09-14 | 2025-04-10 | Fastening tool |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2023042385A JP2023042385A (en) | 2023-03-27 |
| JP7700598B2true JP7700598B2 (en) | 2025-07-01 |
Family
ID=85717291
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021149654AActiveJP7700598B2 (en) | 2021-03-04 | 2021-09-14 | Fastening tool |
| JP2025064715APendingJP2025096493A (en) | 2021-09-14 | 2025-04-10 | Fastening tool |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2025064715APendingJP2025096493A (en) | 2021-09-14 | 2025-04-10 | Fastening tool |
Country Status (1)
| Country | Link |
|---|---|
| JP (2) | JP7700598B2 (en) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011073110A (en) | 2009-09-30 | 2011-04-14 | Hitachi Koki Co Ltd | Driving machine |
| CN104972438A (en) | 2014-04-10 | 2015-10-14 | 苏州宝时得电动工具有限公司 | Power tool |
| JP2016087703A (en) | 2014-10-29 | 2016-05-23 | 日立工機株式会社 | Power work machine |
| JP2017509493A (en) | 2014-01-27 | 2017-04-06 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | Machine tool equipment |
| JP2017213620A (en) | 2016-05-30 | 2017-12-07 | マックス株式会社 | tool |
| JP2018118294A (en) | 2017-01-27 | 2018-08-02 | 株式会社マキタ | Fastening tool |
| JP2019077024A (en) | 2017-10-26 | 2019-05-23 | マックス株式会社 | Tool and power tool |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63300830A (en)* | 1987-05-28 | 1988-12-08 | Nitto Seiko Co Ltd | Industrial robot screw tightening device |
| JPH0653039U (en)* | 1992-06-09 | 1994-07-19 | 賢次 安藤 | Shaft slide Axis-centered screwdriver |
| JPH06312382A (en)* | 1993-04-28 | 1994-11-08 | Makita Corp | Drill bit storage structure for motor-driven tool |
| US5890405A (en)* | 1996-09-11 | 1999-04-06 | Becker; Burkhard | Automated screw driving device |
| JP2018118924A (en)* | 2017-01-25 | 2018-08-02 | 太陽化学株式会社 | Separable cosmetic |
- 2021
- 2021-09-14JPJP2021149654Apatent/JP7700598B2/enactiveActive
- 2025
- 2025-04-10JPJP2025064715Apatent/JP2025096493A/enactivePending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011073110A (en) | 2009-09-30 | 2011-04-14 | Hitachi Koki Co Ltd | Driving machine |
| JP2017509493A (en) | 2014-01-27 | 2017-04-06 | ローベルト ボッシュ ゲゼルシャフト ミット ベシュレンクテル ハフツング | Machine tool equipment |
| CN104972438A (en) | 2014-04-10 | 2015-10-14 | 苏州宝时得电动工具有限公司 | Power tool |
| JP2016087703A (en) | 2014-10-29 | 2016-05-23 | 日立工機株式会社 | Power work machine |
| JP2017213620A (en) | 2016-05-30 | 2017-12-07 | マックス株式会社 | tool |
| JP2018118294A (en) | 2017-01-27 | 2018-08-02 | 株式会社マキタ | Fastening tool |
| JP2019077024A (en) | 2017-10-26 | 2019-05-23 | マックス株式会社 | Tool and power tool |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2025096493A (en) | 2025-06-26 |
| JP2023042385A (en) | 2023-03-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2005288608A (en) | Portable fastener driving tool | |
| JP2005288607A (en) | Portable fastener driving tool | |
| JP7700598B2 (en) | Fastening tool | |
| JP7703960B2 (en) | Fastening tool | |
| EP4052848B1 (en) | Fastening tool | |
| NZ785849A (en) | Fastening tool | |
| JP7753645B2 (en) | Fastening tool | |
| US20230330820A1 (en) | Fastening tool | |
| JP7707579B2 (en) | Fastening tool | |
| JP7673427B2 (en) | Fastening Tools | |
| US12350793B2 (en) | Fastening tool | |
| JP7718195B2 (en) | Fastening tool | |
| NZ785832A (en) | Fastening tool | |
| JP2022135118A (en) | fastening tool |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney | Free format text:JAPANESE INTERMEDIATE CODE: A7422 Effective date:20220114 | |
| A621 | Written request for application examination | Free format text:JAPANESE INTERMEDIATE CODE: A621 Effective date:20240624 | |
| A977 | Report on retrieval | Free format text:JAPANESE INTERMEDIATE CODE: A971007 Effective date:20250226 | |
| A131 | Notification of reasons for refusal | Free format text:JAPANESE INTERMEDIATE CODE: A131 Effective date:20250311 | |
| A521 | Request for written amendment filed | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20250410 | |
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 Effective date:20250520 | |
| A61 | First payment of annual fees (during grant procedure) | Free format text:JAPANESE INTERMEDIATE CODE: A61 Effective date:20250602 | |
| R150 | Certificate of patent or registration of utility model | Ref document number:7700598 Country of ref document:JP Free format text:JAPANESE INTERMEDIATE CODE: R150 |