JP7613879B2 - Educational system and method - Google Patents
Educational system and methodDownload PDFInfo
- Publication number
- JP7613879B2 JP7613879B2JP2020175619AJP2020175619AJP7613879B2JP 7613879 B2JP7613879 B2JP 7613879B2JP 2020175619 AJP2020175619 AJP 2020175619AJP 2020175619 AJP2020175619 AJP 2020175619AJP 7613879 B2JP7613879 B2JP 7613879B2
- Authority
- JP
- Japan
- Prior art keywords
- student
- instructor
- input
- control device
- robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Landscapes
- Manipulator (AREA)
- Electrically Operated Instructional Devices (AREA)
Description
Translated fromJapanese本開示は、教育システムに関する。This disclosure relates to an educational system.
例えば、産業用ロボットが関わる業務の従事者は、特別教育を受けることが法律で規定されている。特別教育は、学科及び実技の教育を含む。また、作業現場において、産業用ロボットの操作技術及び教示技術は、講師である熟練者から受講者である初心者に教育される。例えば、特許文献1はロボット制御システムを開示し、このロボット制御システムは、ロボット制御装置に可搬式操作装置を接続してロボットの教示作業を行う一方で、教示作業の様子を別の可搬式操作装置でモニタしつつ操作教育を行うことに対応する。ロボット制御装置と可搬式操作装置とは、ネットワーク通信を介して接続される。ロボット制御システムは、複数の可搬式操作装置と1つのロボット制御装置とを同時に通信可能にし、そのときの可搬式操作装置の利用形態を判別可能にする。For example, it is stipulated by law that workers who work with industrial robots must receive special training. The special training includes both academic and practical training. Furthermore, at the workplace, the operation and teaching techniques of industrial robots are taught to the beginners who are trained by an experienced instructor. For example,
特許文献1のロボット制御システムは、ロボット制御装置と可搬式操作装置との間で既にネットワーク通信が確立されており且つロボットの教示機能が有効化されている状態で、異なる別の可搬式操作装置からネットワーク通信の接続要求がなされると、別の可搬式操作装置に対して教示機能を無効化し且つロボット制御装置の状態のみを表示する通信を確立する。このようなロボット制御システムにおける通信の確立及び教示機能の有効化のための構成は、可搬式操作装置を持つ講師が可搬式操作装置を持つ受講者を指導しコントロールするような教育、つまり、ロボットの業務に係る教育に適さない。In the robot control system of
本開示は、講師による受講者のコントロールを可能にする教育システムを提供することを目的とする。The purpose of this disclosure is to provide an educational system that allows instructors to control students.
本開示の一態様に係る教育システムは、リモートアクセス環境でのロボットに関する業務の教育のための教育システムであって、講師エリアに配置されるロボットと、前記講師エリアに配置される制御装置と、前記制御装置とデータ通信可能に前記講師エリアに配置され、前記講師エリアの講師の入力を受け付け、前記講師の入力に従った指令を前記制御装置に出力する講師操作器と、前記講師エリアに配置され且つ前記制御装置を通信ネットワークにデータ通信可能に接続する講師通信装置と、受講者エリアに配置され、前記受講者エリアの受講者の入力を受け付け、前記受講者の入力に従った指令を出力する受講者操作器と、前記受講者エリアに配置され且つ前記受講者操作器を前記通信ネットワークにデータ通信可能に接続する受講者通信装置とを備え、前記受講者操作器は、前記受講者通信装置、前記通信ネットワーク及び前記講師通信装置を介して、前記制御装置及び前記講師操作器とデータ通信可能に接続され、前記講師操作器は、前記受講者操作器から前記制御装置への指令の入力許可の指令を、前記制御装置と前記受講者操作器とに送信し、前記制御装置は、前記ロボットの動作を制御可能であり、前記入力許可を受けている状態の前記受講者操作器から受け取る指令に従って、前記ロボットに動作させる。An educational system according to one aspect of the present disclosure is an educational system for teaching robot-related tasks in a remote access environment, comprising a robot arranged in an instructor area, a control device arranged in the instructor area, an instructor operation device arranged in the instructor area capable of data communication with the control device, receiving input from an instructor in the instructor area and outputting commands in accordance with the instructor's input to the control device, an instructor communication device arranged in the instructor area and connecting the control device to a communication network in a data-communicable manner, and a receiver arranged in a student area, receiving input from a student in the student area and outputting commands in accordance with the student's input. The system includes a lecturer operating device and a lecturer communication device that is placed in the lecturer area and connects the lecturer operating device to the communication network so that data communication is possible, the lecturer operating device is connected to the control device and the lecturer operating device so that data communication is possible via the lecturer communication device, the communication network, and the lecturer communication device, the lecturer operating device transmits a command to the control device and the lecturer operating device to allow input of a command from the lecturer operating device to the control device, the control device is capable of controlling the operation of the robot, and causes the robot to operate according to a command received from the lecturer operating device that has been given the input permission.
本開示の技術によれば、講師による受講者のコントロールが可能になる。The technology disclosed herein allows instructors to control students.
以下において、本開示の実施の形態を、図面を参照しつつ説明する。なお、以下で説明する実施の形態は、いずれも包括的又は具体的な例を示すものである。また、以下の実施の形態における構成要素のうち、最上位概念を示す独立請求項に記載されていない構成要素については、任意の構成要素として説明される。また、添付の図面における各図は、模式的な図であり、必ずしも厳密に図示されたものでない。さらに、各図において、実質的に同一の構成要素に対しては同一の符号を付しており、重複する説明は省略又は簡略化される場合がある。また、本明細書及び特許請求の範囲では、「装置」とは、1つの装置を意味し得るだけでなく、複数の装置からなるシステムも意味し得る。Below, the embodiments of the present disclosure will be described with reference to the drawings. Note that the embodiments described below are all comprehensive or specific examples. In addition, among the components in the following embodiments, components that are not described in an independent claim that indicates a top-level concept will be described as optional components. In addition, each figure in the attached drawings is a schematic diagram and is not necessarily an exact illustration. Furthermore, in each figure, substantially the same components are given the same reference numerals, and duplicated descriptions may be omitted or simplified. In addition, in this specification and claims, "apparatus" may mean not only one apparatus but also a system consisting of multiple apparatuses.
[教育システムの構成]
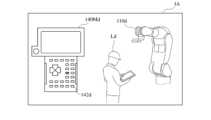
実施の形態に係る教育システム1の構成を説明する。図1は、実施の形態に係る教育システム1の構成の一例を示す概略図である。図1に示すように、実施の形態に係る教育システム1は、リモートアクセス環境でのロボットに関する業務の教育のための教育システムである。教育システム1は、講師エリアALに配置される構成要素と、少なくとも1つの受講者エリアASに配置される構成要素とを含む。 [Structure of the Educational System]
The configuration of an
講師エリアALは、ロボットに関する業務の教育を行う講師Lが滞在し、教育に使用されるロボット110が配置されるエリアである。講師Lは、ロボット110を用いて当該教育を行う。受講者エリアASは、ロボットに関する業務の教育を受ける受講者Sが滞在するエリアであり、講師エリアALから離れた位置に存在する。例えば、受講者エリアASの受講者Sが、講師エリアALの講師Lと、直接の会話等の直接的なコミュニケーションをとることができないような位置に、受講者エリアASは存在する。よって、講師Lと受講者Sとは、通信を介して互いにコミュニケーションをとる。The instructor area AL is an area where an instructor L who provides training on robot-related tasks stays, and where the
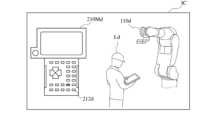
教育システム1は、1つの講師エリアALの講師Lが、1つ以上の受講者エリアASの受講者Sに教育を行うことを可能にする。本実施の形態では、1つの講師エリアALの講師Lが、2つ以上の受講者エリアASの受講者Sに教育を行うことができる。図1の例では、1つの受講者エリアASに存在する受講者Sは1人であるが、2人以上であってもよい。The
講師エリアALにおいて、教育システム1は、ロボット110と、ロボット110の周辺機器120と、制御装置130と、講師操作器140と、講師通信装置150と、撮像装置161~163と、講師エリアディスプレイ170と、マイク180と、スピーカ190とを含む。制御装置130は、ロボット110、周辺機器120、講師操作器140、講師通信装置150、撮像装置161~163、講師エリアディスプレイ170、マイク180及びスピーカ190と、有線通信又は無線通信を介して接続される。有線通信及び無線通信は、いかなる有線通信、無線通信及びこれらの組み合わせであってもよい。講師通信装置150は通信ネットワークNとデータ通信可能に接続される。In the instructor area AL, the
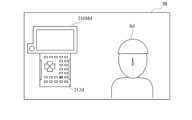
各受講者エリアASにおいて、教育システム1は、少なくとも1つの受講者操作器210と、受講者通信装置220と、撮像装置230と、受講者エリアディスプレイ240と、マイク250と、スピーカ260とを含む。受講者通信装置220は、受講者操作器210、撮像装置230、受講者エリアディスプレイ240、マイク250及びスピーカ260と有線通信又は無線通信を介して接続される。有線通信及び無線通信は、いかなる有線通信、無線通信及びこれらの組み合わせであってもよい。受講者通信装置220は通信ネットワークNとデータ通信可能に接続される。In each student area AS, the
さらに、教育システム1は、通信ネットワークNとデータ通信可能に接続されるサーバ310を含む。Furthermore, the
通信ネットワークNは特に限定されず、例えば、ローカルエリアネットワーク(Local Area Network:LAN)、広域ネットワーク(Wide Area Network:WAN)、インターネット、又はこれらの2つ以上の組み合わせを含むことができる。通信ネットワークNは、ブルートゥース(Bluetooth(登録商標))及びZigBee(登録商標)などの近距離無線通信、ネットワーク専用回線、通信事業者の専用回線、公衆交換電話網(Public Switched Telephone Network:PSTN)、モバイル通信網、インターネット網、衛星通信、又は、これらの2つ以上の組み合わせを用いるように構成され得る。モバイル通信網は、第4世代移動通信システム及び第5世代移動通信システム等を用いるものであってもよい。通信ネットワークNは、1つ又は複数のネットワークを含むことができる。本実施の形態では、通信ネットワークNはインターネットである。The communication network N is not particularly limited, and may include, for example, a local area network (LAN), a wide area network (WAN), the Internet, or a combination of two or more of these. The communication network N may be configured to use short-range wireless communication such as Bluetooth (registered trademark) and ZigBee (registered trademark), a network dedicated line, a dedicated line of a communication carrier, a public switched telephone network (PSTN), a mobile communication network, the Internet network, satellite communication, or a combination of two or more of these. The mobile communication network may use a fourth generation mobile communication system and a fifth generation mobile communication system, etc. The communication network N may include one or more networks. In this embodiment, the communication network N is the Internet.
サーバ310は、通信ネットワークNを介した通信を管理する。サーバ310は、コンピュータ装置を含む。サーバ310は、講師通信装置150と受講者通信装置220との間の通信の認証、接続及び接続解除、並びに、受講者通信装置220と他の受講者通信装置220との間の通信の認証、接続及び接続解除を管理する。例えば、サーバ310は、教育システム1に登録されている講師通信装置150及び受講者通信装置220の識別情報及びセキュリティ情報等を記憶し、当該情報を用いて、各装置の教育システム1への接続の資格を認証する。サーバ310は、講師通信装置150と受講者通信装置220との間、及び、受講者通信装置220と他の受講者通信装置220との間のデータの送受信を管理する。講師通信装置150と受講者通信装置220との間で送受信されるデータ、及び、受講者通信装置220と他の受講者通信装置220との間で送受信されるデータは、サーバ310を経由する。サーバ310は、送信元から送信されるデータを、送信先が利用可能なデータ型式に変換するように構成されてもよい。The
また、サーバ310は、教育システム1での学科教育のためのプログラム及びデータを記憶してもよい。学科教育は、講師操作器140と受講者操作器210との間で通信ネットワークNを介して行われ、学科教育のためのプログラム及びデータは、講師操作器140及び受講者操作器210によって用いられる。学科教育のためのプログラム及びデータは、専用のWEBサイト上で実行されるように構成されてもよい。The
サーバ310は、教育の終了の認定のために用いられる認定データを記憶してもよい。認定データは、学科教育のテスト用のプログラム及びデータ、学科教育の評価と実技教育の評価とに基づき教育の終了を認定するためのプログラム及びデータ等を含む。学科教育のテスト用のプログラム及びデータは、学科教育のテストの実行、当該テストの採点、及び、採点結果に基づく学科教育の評価の決定等のためのプログラム及びデータを含む。実技教育の評価は、講師Lによって講師操作器140に入力される評価であってもよい。The
なお、学科教育のためのプログラム及びデータ、並びに、認定データの一部又は全部は、制御装置130に記憶されてもよい。In addition, the programs and data for academic education, as well as some or all of the certification data, may be stored in the
[講師エリアの構成要素]
講師エリアALの各構成要素を説明する。図1に示すように、本実施の形態では、ロボット110は産業用ロボットであるが、これに限定されない。例えば、ロボット110は、サービスロボット、建設機械、トンネル掘削機、クレーン、荷役搬送車、及びヒューマノイド等であってもよい。サービスロボットは、介護、医療、清掃、警備、案内、救助、調理、商品提供等の様々なサービス業で使用されるロボットである。これに限定されないが、本実施の形態では、ロボット110は、ロボットアーム111と、ロボットアーム111の先端に取り付けられるエンドエフェクタ112とを備える。ロボットアーム111は複数の関節を有し、多自由度に動作することができる。ロボットアーム111は、エンドエフェクタ112を様々な位置及び姿勢に移動させることができる。エンドエフェクタ112は、処理の対象物であるワークWに作用を加えることができるように構成される。エンドエフェクタ112の作用は特に限定されないが、本実施の形態ではワークWを把持する作用である。 [Components of the instructor area]
Each component of the instructor area AL will be described. As shown in FIG. 1, in this embodiment, the
周辺機器120は、ロボット110の周辺に配置され、例えば、ロボット110の動作と連携して動作するように構成される。周辺機器120は、ロボット110と連携して動作してワークWに対して作用を与えるように構成されてもよい。これに限定されないが、本実施の形態では、周辺機器120は、ワークWを搬送するベルトコンベヤである。周辺機器120は必須ではない。The
撮像装置161~163は、デジタル画像を撮像するカメラを備え、撮像した画像のデータを制御装置130に送る。制御装置130は、撮像装置161~163によって撮像された画像データをネットワーク送信可能な画像データにする処理をし、通信ネットワークNを介して、当該画像データを少なくとも1つの受講者エリアASの受講者エリアディスプレイ240に送る。撮像装置161は、講師エリアAL内で固定して配置され、ロボット110及び周辺機器120の全体を撮像する。撮像装置162は、講師Lに装着されるウェアラブル撮像装置である。これに限定されないが、本実施の形態では、撮像装置162は、講師Lの頭部に装着され、講師Lの目線と同様の向きに方向付けられる。撮像装置162は、講師Lの視界に映る像と同様の像を写し出す画像を撮像することができる。撮像装置163は、講師Lに向けて配置される。これに限定されないが、本実施の形態では、撮像装置163は、講師エリアディスプレイ170の上部に配置され、講師Lの顔の画像を撮像するように配置される。撮像装置163は、講師操作器140に配置されてもよい。The imaging devices 161-163 are equipped with cameras that capture digital images, and send the captured image data to the
マイク180は、講師Lが発する音声を取得することができるような位置及び向きに配置される。マイク180は、講師Lが発する音声を取得し、当該音声の音声信号を制御装置130に送る。制御装置130は、マイク180から送られる音声信号をネットワーク送信可能な音声データにする処理をし、通信ネットワークNを介して、当該音声データを少なくとも1つの受講者エリアASのスピーカ260に送る。これに限定されないが、本実施の形態では、マイク180は、講師エリアディスプレイ170の上部に配置される。マイク180は、講師操作器140に配置されてもよい。The
スピーカ190は、音声を講師Lに向けて発し、講師Lが当該音声を聞き取ることができるような位置及び向きに配置される。スピーカ190は、制御装置130から送られる音声信号を音声として発する。制御装置130は、少なくとも1つの受講者エリアASのマイク250から通信ネットワークNを介して送られる音声データを音声信号に変換し、当該音声信号をスピーカ190に送る。これに限定されないが、本実施の形態では、スピーカ190は、講師エリアディスプレイ170の下部に配置される。スピーカ190は、講師操作器140に配置されてもよい。The
講師エリアディスプレイ170は、画像を講師Lに向けて表示し、講師Lが当該画像を視認することができるような位置及び向きに配置される。講師エリアディスプレイ170は、制御装置130から送られる画像データを画像として表示する。制御装置130は、少なくとも1つの受講者エリアASの撮像装置230から通信ネットワークNを介して送られる画像データを処理し、当該画像データに対応する画像を講師エリアディスプレイ170に表示させる。The
講師操作器140は、制御装置130との間で、様々な指令、情報及びデータ等を送受信することができるように構成される。講師操作器140は、制御装置130を介して、ロボット110及び周辺機器120を操作することができるように構成される。講師操作器140は、制御装置130を介して、各受講者エリアASの受講者操作器210との間で、指令、情報及びデータ等を送受信することができるように構成される。なお、講師操作器140は、制御装置130を介さずに、各受講者エリアASの受講者操作器210との間で、指令、情報及びデータ等を送受信することができるように構成されてもよい。The
講師操作器140の構成は特に限定されず、例えば、講師操作器140は、ロボットへの教示作業に使用される公知の教示装置、ロボットの公知の操作装置、スマートフォン、スマートウォッチ及びタブレットなどのスマートデバイス、パーソナルコンピュータなどのコンピュータ装置、その他の公知の操作装置、これらを利用する装置、又は、これらを改良した装置であってもよい。本実施の形態では、講師操作器140は、教示装置の一例であるティーチペンダントである。本実施の形態では、講師操作器140は、通信ネットワークNに直接接続することができる機能及び装置を備えていない。しかしながら、講師操作器140は、講師通信装置150の機能を備え、通信ネットワークNに直接接続できるように構成されてもよい。The configuration of the
図2は、実施の形態に係る講師操作器140の構成の一例を示す平面図である。図2に示すように、講師操作器140は、操作器ディスプレイ141と、複数の入力要素142と、複数の強調要素143と、トリガスイッチ144と、緊急停止スイッチ145と、操作コントローラ146とを備える。Figure 2 is a plan view showing an example of the configuration of the
操作コントローラ146は、講師操作器140の全体の動作を制御し、コンピュータ装置を含む。操作器ディスプレイ141は、操作コントローラ146の指令に従って、様々な画像を表示する。例えば、操作器ディスプレイ141は、講師操作器140の操作用画面の画像、及び、受講者エリアASの受講者操作器210から送られる受講者操作器210の操作用画面の画像等を表示し得る。The
複数の入力要素142は、講師Lによる入力を受け付け、入力内容を示す信号を出力する。各入力要素142によって出力される信号は、操作コントローラ146によって制御装置130に送られる。当該信号は、操作コントローラ146によって変換されて送られる場合もある。複数の入力要素142は、レバー、ボタン、キー、キーボード、タッチパネル、タッチディスプレイ、ジョイスティック、モーションキャプチャ等の公知の入力要素を含んでもよい。The
複数の強調要素143は、複数の入力要素142それぞれに対応して配置される。1つの入力要素142に複数の強調要素143が配置されてもよい。強調要素143は、入力要素142を個別に強調表示することができるように構成される。強調要素143は、操作コントローラ146の制御に従って動作する。操作コントローラ146は、受講者エリアASの受講者操作器210から送られる受講者操作器210の入力要素212の情報に従って、強調表示させる強調要素143を決定する。例えば、入力要素212の情報は、受講者Sによる入力を受けている入力要素212の情報であり、操作コントローラ146は、当該入力要素212と同様の機能を有する入力要素142、つまり、当該入力要素212に対応する入力要素142の強調要素143に強調表示させる。The
例えば、入力要素142が物理的な要素である場合、強調要素143は、入力要素142の近傍又は入力要素142自体に配置され、発光することで入力要素142を強調するように構成されてもよい。この場合、強調要素143はLED(Light Emitting Diode)等の光源であってもよい。入力要素142を強調する強調要素143が操作器ディスプレイ141に示されるように構成されてもよい。入力要素142がタッチパネル又はタッチディスプレイに表示される画像内の像である場合、強調要素143は、タッチパネル又はタッチディスプレイの画像内で入力要素142の像を強調する像を形成するように構成されてもよい。For example, if the
トリガスイッチ144は、ロボット110及び周辺機器120への駆動電力の供給許可の指令及び供給停止の指令を選択的に出力するように構成される。本実施の形態では、2つのトリガスイッチ144が配置される。各トリガスイッチ144は、押されているときにON状態の信号を操作コントローラ146に出力し、押されていないときにON状態の信号を出力しない。操作コントローラ146は、2つのトリガスイッチ144から同時にON状態の信号を受け取っている間、供給許可の指令を制御装置130に出力する。操作コントローラ146は、2つのトリガスイッチ144から同時にON状態の信号を受け取っていないとき、供給停止の指令を制御装置130に出力する。なお、操作コントローラ146は、2つのトリガスイッチ144の出力信号を制御装置130に送り、制御装置130が操作コントローラ146と同様に、供給許可及び供給停止を決定してもよい。The
なお、供給停止の状態では、ロボット110及び周辺機器120の電源はON状態である。しかしながら、制御装置130は、ロボット110及び周辺機器120を動作させる指令を受け取っても、当該動作のための駆動電力をロボット110及び周辺機器120に供給しない。供給停止の状態は、ロボット110及び周辺機器120に動作をさせずに待機させておく待機電力が供給される状態であり、例えば、レディ状態である。In addition, in the supply-stopped state, the power supply of the
供給許可の状態では、制御装置130は、ロボット110及び周辺機器120を動作させる指令を受け取ると、当該動作のための駆動電力をロボット110及び周辺機器120に供給する。When the
緊急停止スイッチ145は、ロボット110及び周辺機器120への電力供給をシャットダウンすることでロボット110及び周辺機器120を緊急停止させる緊急停止指令を出力するように構成される。本実施の形態では、緊急停止スイッチ145は、押されたときにのみ緊急停止指令の信号を操作コントローラ146に出力する。操作コントローラ146は、緊急停止指令を制御装置130に出力する。The
緊急停止の状態では、ロボット110及び周辺機器120の電源がOFF状態である。制御装置130は、緊急停止指令を受け取ると、ロボット110及び周辺機器120の電源をおとす。In an emergency stop state, the power to the
操作コントローラ146は、講師Lによる入力要素142への入力に従って、ロボット110及び周辺機器120を操作するための指令、ロボット110に所定の作業を実行させるためのプログラムである教示データを生成するための指令、並びに、操作器ディスプレイ141に表示される画像のデータを受講者操作器210に送信する指令等を制御装置130に送る。操作コントローラ146は、講師Lによる入力要素142への入力に従って、受講者操作器210にロボット110及び周辺機器120の操作を許可する指令、受講者操作器210に教示データの生成を許可する指令、受講者操作器210の操作器ディスプレイ211に表示される画像のデータを受講者操作器210に要求する指令等を、制御装置130及び受講者操作器210に送る。操作コントローラ146は、制御装置130を介して受講者操作器210に指令を送る。The
制御装置130は、情報処理装置131とロボットコントローラ132とを含む(図3参照)。ロボットコントローラ132は、ロボット110及び周辺機器120の動作を制御する。情報処理装置131は、講師操作器140及び受講者操作器210から受け取る指令、情報及びデータ等を処理し、送信先に出力する。ロボットコントローラ132及び情報処理装置131はコンピュータ装置を含む。ロボットコントローラ132は、ロボット110及び周辺機器120に供給する電力を制御するための電気回路を含み得る。The
講師通信装置150は、通信ネットワークNと接続可能である通信インタフェースを備える。講師通信装置150は、制御装置130と接続され、制御装置130と通信ネットワークNとをデータ通信可能に接続する。講師通信装置150は、講師操作器140と接続され、講師操作器140と通信ネットワークNとをデータ通信可能に接続するように構成されてもよい。講師通信装置150は、例えば、モデム、ONU(光回線の終端装置)及びルータ等の通信機器を含んでもよい。講師通信装置150は、演算機能等を有するコンピュータ装置を含んでもよい。The
[受講者エリアの構成要素]
受講者エリアASの各構成要素を説明する。図1に示すように、撮像装置230は、デジタル画像を撮像するカメラを備え、撮像した画像のデータを、受講者通信装置220等を介して講師エリアALの制御装置130に送る。受講者通信装置220は、受け取った画像データをネットワーク送信可能な画像データにする処理をする。制御装置130は、受け取った画像データを処理し、当該画像データに対応する画像を講師エリアディスプレイ170に表示させる。撮像装置230は、受講者Sに向けて配置される。これに限定されないが、本実施の形態では、撮像装置230は、受講者エリアディスプレイ240の上部に配置され、受講者Sの顔の画像を撮像するように配置される。撮像装置230は、受講者操作器210に配置されてもよい。 [Components of the student area]
Each component of the student area AS will be described. As shown in FIG. 1, the
マイク250は、受講者Sが発する音声を取得することができるような位置及び向きに配置される。マイク250は、受講者Sが発する音声を取得し、当該音声の音声信号を、受講者通信装置220等を介して講師エリアALの制御装置130に送る。受講者通信装置220は、受け取った音声信号をネットワーク送信可能な音声データにする処理をする。制御装置130は、受け取った音声データを音声信号に変換しスピーカ190に送る。これに限定されないが、本実施の形態では、マイク250は、受講者エリアディスプレイ240の上部に配置される。マイク250は、受講者操作器210に配置されてもよい。The
スピーカ260は、音声を受講者Sに向けて発し、受講者Sが当該音声を聞き取ることができるような位置及び向きに配置される。受講者通信装置220は、講師エリアALのマイク180から通信ネットワークNを介して送られる音声データを音声信号に変換し、スピーカ260に送る。これに限定されないが、本実施の形態では、スピーカ260は、受講者エリアディスプレイ240の下部に配置される。スピーカ260は、受講者操作器210に配置されてもよい。The
受講者エリアディスプレイ240は、画像を受講者Sに向けて表示し、受講者Sが当該画像を視認することができるような位置及び向きに配置される。受講者通信装置220は、講師エリアALの撮像装置161~163から通信ネットワークNを介して送られる画像データを処理し、受講者エリアディスプレイ240に送る。受講者エリアディスプレイ240は当該画像データを画像として表示する。The
受講者操作器210は、受講者通信装置220及び通信ネットワークN等を介して、制御装置130との間で、様々な指令、情報及びデータ等を送受信することができるように構成される。受講者操作器210は、講師操作器140の許可を受けている状態において、制御装置130を介して、ロボット110及び周辺機器120を操作することができるように構成される。受講者操作器210は、制御装置130を介して、講師操作器140との間で、指令、情報及びデータ等を送受信することができるように構成される。なお、受講者操作器210は、制御装置130を介さずに、講師操作器140の間で、指令、情報及びデータ等を送受信することができるように構成されてもよい。The
受講者操作器210の構成は特に限定されず、例えば、受講者操作器210は、講師操作器140として例示したような装置であってもよい。これに限定されないが、本実施の形態では、受講者操作器210は、講師操作器140と同様の構成を有する。これにより、講師L及び受講者Sそれぞれが同じ指令等のために講師操作器140及び受講者操作器210に入力する内容が同じであるため、教育が容易になる。受講者操作器210は、通信ネットワークNに直接接続できるように構成されてもよい。The configuration of the
図3は、実施の形態に係る受講者操作器210の構成の一例を示す平面図である。図3に示すように、受講者操作器210は、講師操作器140と同様に、操作器ディスプレイ211と、複数の入力要素212と、複数の強調要素213と、トリガスイッチ214と、緊急停止スイッチ215と、操作コントローラ216とを備える。操作器ディスプレイ211、入力要素212、強調要素213、トリガスイッチ214、緊急停止スイッチ215及び操作コントローラ216それぞれの機能は、講師操作器140の操作器ディスプレイ141、入力要素142、強調要素143、トリガスイッチ144、緊急停止スイッチ145及び操作コントローラ146と同様であるため、その詳細な説明を省略する。Figure 3 is a plan view showing an example of the configuration of a
なお、操作器ディスプレイ211は、操作コントローラ216の指令に従って、受講者操作器210の操作用画面の画像、講師操作器140から送られる講師操作器140の操作用画面の画像、及び、他の受講者操作器210から送られる当該受講者操作器210の操作用画面の画像等を表示し得る。Furthermore, the
複数の強調要素213は、操作コントローラ146の制御に従って動作し、操作コントローラ146は、講師操作器140から送られる入力要素142の情報に基づき、入力を受けている入力要素142に対応する入力要素212の強調要素213に強調表示させる。操作コントローラ146は、他の受講者操作器210から送られる入力要素212の情報に基づき、他の受講者操作器210において入力を受けている入力要素212に対応する入力要素212の強調要素213に強調表示させる。The
操作コントローラ216は、受講者Sによる入力要素212への入力に従って、ロボット110及び周辺機器120を操作するための指令、ロボット110に所定の作業を実行させるためのプログラムである教示データを生成するための指令、並びに、操作器ディスプレイ211に表示される画像のデータを講師操作器140及び他の受講者操作器210に送信する指令等を出力する。The
例えば、受講者操作器210がロボット110及び周辺機器120の操作の許可を受けている場合、制御装置130は、講師操作器140の2つのトリガスイッチ144のON状態の情報と、当該受講者操作器210の2つのトリガスイッチ214のON状態の情報とを同時に受け取っている間、受講者操作器210の指令に従ってロボット110及び周辺機器120に動作させる。講師操作器140がロボット110及び周辺機器120を操作可能である場合、制御装置130は、2つのトリガスイッチ144のON状態の情報を受け取っている間、講師操作器140の指令に従ってロボット110及び周辺機器120に動作させる。For example, if the
受講者通信装置220は、通信ネットワークNと接続可能である通信インタフェースを備える。受講者通信装置220は、受講者操作器210、撮像装置230、受講者エリアディスプレイ240、マイク250及びスピーカ260と接続され、これらと通信ネットワークNとをデータ通信可能に接続する。受講者通信装置220は、例えば、モデム、ONU(光回線の終端装置)及びルータ等の通信機器を含んでもよい。受講者通信装置220は、演算機能等を有するコンピュータ装置を含む。The
[教育システムのハードウェア構成]
実施の形態に係る教育システム1のハードウェア構成を説明する。図4は、実施の形態に係る教育システム1のハードウェア構成の一例を示すブロック図である。図4では、1つの講師操作器140と1つの受講者操作器210との関係が示されるが、他の受講者操作器210も、図示される受講者操作器210と同様の構成を有する。 [Hardware configuration of the education system]
A hardware configuration of the
図4に示すように、講師操作器140、情報処理装置131、ロボットコントローラ132、サーバ310、受講者通信装置220及び受講者操作器210は、コンピュータ装置を含む。各コンピュータ装置は、プロセッサPrとメモリMとを含む。プロセッサPr及びメモリMは演算器を構成する。演算器は、他の装置との指令、情報及びデータ等の送受信を行う。演算器は、各種機器からの信号の入力及び各制御対象への制御信号の出力を行う。As shown in FIG. 4, the
メモリMは、プロセッサPrが実行するプログラム、及び各種固定データ等を記憶する。メモリMは、揮発性メモリ及び不揮発性メモリなどの半導体メモリ等の記憶装置で構成されてもよい。これに限定されないが、本実施の形態では、メモリMは、揮発性メモリであるRAM(Random Access Memory)と不揮発性メモリであるROM(Read-Only Memory)とを含む。The memory M stores the programs executed by the processor Pr, various fixed data, etc. The memory M may be configured with a storage device such as a semiconductor memory, such as a volatile memory or a non-volatile memory. Although not limited thereto, in this embodiment, the memory M includes a RAM (Random Access Memory), which is a volatile memory, and a ROM (Read-Only Memory), which is a non-volatile memory.
プロセッサPrは、RAM及びROMと一緒にコンピュータシステムを形成する。コンピュータシステムは、プロセッサPrがRAMをワークエリアとして用いてROMに記録されたプログラムを実行することによって、コンピュータ装置の機能を実現してもよい。コンピュータ装置の機能の一部又は全部は、上記コンピュータシステムにより実現されてもよく、電子回路又は集積回路等の専用のハードウェア回路により実現されてもよく、上記コンピュータシステム及びハードウェア回路の組み合わせにより実現されてもよい。コンピュータ装置は、単一のコンピュータ装置による集中制御により各処理を実行してもよく、複数のコンピュータ装置の協働による分散制御により各処理を実行してもよい。The processor Pr, together with the RAM and ROM, forms a computer system. The computer system may realize the functions of a computer device by the processor Pr using the RAM as a work area to execute a program recorded in the ROM. Some or all of the functions of the computer device may be realized by the computer system, by a dedicated hardware circuit such as an electronic circuit or integrated circuit, or by a combination of the computer system and the hardware circuit. The computer device may execute each process under centralized control by a single computer device, or may execute each process under distributed control through the cooperation of multiple computer devices.
これに限定されないが、例えば、プロセッサPrは、CPU(中央処理装置:Central Processing Unit)、MPU(Micro Processing Unit)、GPU(Graphics Processing Unit)、マイクロプロセッサ(microprocessor)、プロセッサコア(processor core)、マルチプロセッサ(multiprocessor)、ASIC(Application-Specific Integrated Circuit)、FPGA(Field Programmable Gate Array)等を含み、IC(集積回路)チップ、LSI(Large Scale Integration)等に形成された論理回路又は専用回路によって各処理を実現してもよい。複数の処理は、1つ又は複数の集積回路により実現されてもよく、1つの集積回路により実現されてもよい。For example, but not limited to, the processor Pr may include a CPU (Central Processing Unit), MPU (Micro Processing Unit), GPU (Graphics Processing Unit), microprocessor, processor core, multiprocessor, ASIC (Application-Specific Integrated Circuit), FPGA (Field Programmable Gate Array), etc., and each process may be realized by a logic circuit or a dedicated circuit formed in an IC (Integrated Circuit) chip, LSI (Large Scale Integration), etc. Multiple processes may be realized by one or multiple integrated circuits, or may be realized by a single integrated circuit.
サーバ310は、プロセッサPr及びメモリMに加えて、ストレージStをさらに含む。ストレージStは、ハードディスクドライブ及びSSD(Solid State Drive)等の記憶装置で構成されてもよい。ストレージStは、教育システム1に登録されている講師通信装置150及び受講者通信装置220に関する情報、教育システム1での学科教育のためのプログラム及びデータ、並びに、教育の終了の認定のために用いられる認定データ等を記憶する。In addition to the processor Pr and memory M, the
受講者通信装置220は、プロセッサPr及びメモリMに加えて、通信回路221をさらに含む。通信回路221は、受講者通信装置220と通信ネットワークNとの接続を確立する回路である。The
講師通信装置150は通信回路151を含む。通信回路151は、講師通信装置150と通信ネットワークNとの接続を確立する回路である。なお、講師通信装置150は、受講者通信装置220と同様に、プロセッサPr及びメモリMを含むコンピュータ装置を含んでもよい。当該コンピュータ装置は、情報処理装置131の機能の少なくとも一部を含んでもよい。The
[教育システムの動作]
[ロボット操作の実技教育]
ロボット操作の実技教育での動作を説明する。図5A及び図5Bは、実施の形態に係るロボット操作の実技教育での教育システム1の動作の一例を示すシーケンス図である。ロボット操作は、講師操作器140又は受講者操作器210を用いてロボット110を手動操縦するための操作である。図5A及び図5Bに示すように、まず、講師Lは、講師操作器140を操作し、ロボット操作の実技教育のアプリケーションプログラムを起動する(ステップS101)。サーバ310は、講師操作器140から当該アプリケーションプログラムの起動の通知を受け取り、当該実技教育に参加予定の受講者Sの受講者操作器210に参加許可の通知を送信する(ステップS102)。 [Operation of the Education System]
[Practical training in robot operation]
The operation in the practical training of robot operation will be described. Figures 5A and 5B are sequence diagrams showing an example of the operation of the
各受講者Sは、受講者操作器210を操作し、当該実技教育のアプリケーションプログラムを起動し、サーバ310による認証を受けてログインする(ステップS103)。サーバ310は、ログインしている受講者操作器210の情報であるログイン情報を講師操作器140に送信する(ステップS104)。Each student S operates the
講師Lは、ログインしている受講者操作器210の中から、制御装置130への指令の入力を許可する、つまり、ロボット操作を許可する1つの受講者操作器210を、講師操作器140への入力を介して指定し、講師操作器140は、指定された許可対象の受講者操作器210の情報を制御装置130の情報処理装置131に送信する(ステップS105)。From among the logged-in
情報処理装置131は、許可対象の受講者操作器210の情報と、当該受講者操作器210の操作器ディスプレイ211の画像データ及び入力要素212の入力状態の情報の要求とを、サーバ310等を介して、許可対象の受講者操作器210に送信する(ステップS106)。The
さらに、情報処理装置131は、宛先を許可対象の受講者操作器210の受講者通信装置220として、撮像装置161~163によって撮像される画像のデータ、及び、マイク180を介して取得される音声データをサーバ310に送信し、サーバ310は当該データを宛先の受講者通信装置220に送信する(ステップS107)。受講者通信装置220は、受信した画像データ及び音声データをそれぞれ、受講者エリアディスプレイ240及びスピーカ260に出力する。なお、講師操作器140への入力によって撮像装置161~163のいずれかが任意に指定されてもよく、この場合、情報処理装置131は、指定された撮像装置161~163の画像データをサーバ310に送信してもよい。The
許可対象の受講者操作器210は、要求される情報を、サーバ310に送信する(ステップS108)。具体的には、当該受講者操作器210は、操作器ディスプレイ211の画像データをサーバ310に継続的に送信し、入力要素212への入力がある場合に、入力されている入力要素212の情報をサーバ310に送信する。サーバ310は、許可対象の受講者操作器210から送られる情報を、講師操作器140と他の受講者操作器210とに送信する(ステップS109)。例えば、許可対象の受講者操作器210の操作器ディスプレイ211の画像と同じ画像が、講師操作器140の操作器ディスプレイ141と他の受講者操作器210の操作器ディスプレイ211とに表示される。The authorized
さらに、許可対象の受講者操作器210の受講者通信装置220は、撮像装置230によって撮像される画像のデータ、及び、マイク250を介して取得される音声データを、サーバ310等を介して情報処理装置131に送信する(ステップS110)。情報処理装置131は、受信した画像データ及び音声データをそれぞれ、講師エリアディスプレイ170及びスピーカ190に出力する。Furthermore, the
受講者Sが、許可対象の受講者操作器210の入力要素212に、ロボット110及び/又は周辺機器120に動作させるための操作を入力すると(ステップS111でYes)、当該受講者操作器210は、上記操作の内容を示す操作指令と、入力されている入力要素212の情報と、操作器ディスプレイ211の画像データとを、サーバ310等を介して、情報処理装置131に送信する(ステップS112)。受講者Sは、受講者エリアディスプレイ240に写し出される撮像装置161及び/又は162の撮像画像を視認しつつ、操作を入力することができる。When a student S inputs an operation to operate the
受講者Sによる操作の入力がない場合(ステップS111でNo)、ステップS118に進む。If there is no operational input by student S (No in step S111), proceed to step S118.
情報処理装置131は、受信された操作指令の発信元が許可対象の受講者操作器210であるか否かを判定する(ステップS113)。例えば、情報処理装置131は、操作指令に含まれる識別情報等の発信元の情報を用いて上記判定を行う。The
情報処理装置131は、発信元が許可対象の受講者操作器210である場合(ステップS113でYes)に当該操作指令をロボットコントローラ132に送信する(ステップS114)。なお、情報処理装置131は、講師操作器140の2つのトリガスイッチ144のON状態の情報と、許可対象の受講者操作器210の2つのトリガスイッチ214のON状態の情報とを同時に受け取っている場合のみ、操作指令をロボットコントローラ132に送信する。ロボットコントローラ132は、操作指令を変換して、操作指令に従ってロボット110及び周辺機器120を動作させるための駆動指令を生成し、ロボット110及び周辺機器120に出力する。例えば、駆動指令は、ロボット110及び周辺機器120の駆動装置に印加する電流値等を含む。これにより、ロボット110及び周辺機器120が操作指令に従った動作を行う。If the sender is the
さらに、情報処理装置131は、入力されている入力要素212の情報と、操作器ディスプレイ211の画像データとを講師操作器140に送信する(ステップS115)。これにより、講師操作器140は、操作器ディスプレイ211の画像データに対応する画像を操作器ディスプレイ141に表示し、入力されている入力要素212に対応する講師操作器140の入力要素142を強調要素143によって強調表示する(ステップS116)。なお、情報処理装置131は、上記情報及び画像データを、他の受講者操作器210にも送信する。他の受講者操作器210は、操作器ディスプレイ211に許可対象の受講者操作器210と同様の画像を表示し、許可対象の受講者操作器210の入力されている入力要素212と同様の入力要素212を強調表示する。The
情報処理装置131は、発信元が入力許可された受講者操作器210でない場合(ステップS114でNo)、入力不許可の通知を操作指令の発信元に送信する(ステップS117)。If the sender is not a
ステップS118おいて、講師Lが、受講者Sの操作を修正するため又は受講者Sに操作を教えるために、講師操作器140の入力要素142に操作を入力すると(ステップS118でYes)、講師操作器140は、入力されている入力要素142の情報を、情報処理装置131を介してサーバ310に送信し(ステップS119)、サーバ310は、当該情報を全ての受講者操作器210に送信する(ステップS120)。各受講者操作器210は、入力されている入力要素142に対応する受講者操作器210の入力要素212を強調要素213によって強調表示する(ステップS121)。よって、入力許可を受けている受講者Sを含む全ての受講者Sが、自身の受講者操作器210において、講師Lの指摘を確認することができる。In step S118, when the instructor L inputs an operation into the
講師Lによる操作の入力がない場合(ステップS118でNo)、ステップS122に進む。If there is no operational input from instructor L (No in step S118), proceed to step S122.
講師Lが、入力許可対象の受講者操作器210を変更する指令を講師操作器140に入力すると(ステップS122でYes)、講師操作器140は、当該指令の通知を、情報処理装置131を介してサーバ310に送信し(ステップS123)、ステップS105に戻る。サーバ310は、当該通知を全ての受講者操作器210に送信する(ステップS124)。When instructor L inputs a command to change the
講師操作器140が入力許可対象の受講者操作器210を変更する指令を受け取らない場合(ステップS122でNo)、ステップS125に進む。If the
講師Lが、プログラムを終了する指令を講師操作器140に入力すると(ステップS125でYes)、講師操作器140は、当該指令を情報処理装置131に送信する(ステップS126)。情報処理装置131は、プログラムを終了の通知をサーバ310に送信し(ステップS127)、サーバ310は、当該通知を全ての受講者操作器210に送信する(ステップS128)。情報処理装置131はプログラムを終了する(ステップS129)。When instructor L inputs a command to end the program to the instructor operation device 140 (Yes in step S125), the
講師操作器140がプログラムを終了する指令を受け取らない場合(ステップS125でNo)、ステップS111に戻る。If the
[制御プログラムの生成の実技教育]
制御プログラムの一例である教示データを生成する実技教育での動作を説明する。図6A~図6Cは、実施の形態に係る制御プログラムの生成の実技教育での教育システム1の動作の一例を示すシーケンス図である。本実施の形態では、制御プログラムは教示データである。実技教育は、教示データの生成、及び、生成された教示データの検証を含む。図6A~図6Cに示すように、まず、講師Lは、講師操作器140を操作し、教示データ生成の実技教育のアプリケーションプログラムを起動する(ステップS201)。ステップS202~S210の処理は、ロボット操作の実技教育のステップS102~S110の処理と同様である。なお、ステップS205において、講師Lは、教示データの生成を許可する、つまり制御装置130への指令の入力を許可する1つの受講者操作器210を、講師操作器140への入力を介して指定する。 [Practical training in generating control programs]
The operation in practical training to generate teaching data, which is an example of a control program, will be described. FIGS. 6A to 6C are sequence diagrams showing an example of the operation of the
ここで、受講者Sは、教示データを構成する教示点を設定するためにロボット110に動作をさせる。例えば、教示点の情報は、エンドエフェクタ112の目標の位置、姿勢、速度及び加速度等を含む。教示データは、教示点の情報と教示点の補助情報とを含み、補助情報は、教示点間の軌跡の補間する情報、教示点への到達時刻等を含み得る。生成された教示データは、情報処理装置131又はロボットコントローラ132に記憶される。Here, the student S causes the
教示点の設定のために、受講者Sが、許可対象の受講者操作器210の入力要素212に、ロボット110に動作させるための操作を入力すると(ステップS211でYes)、当該受講者操作器210は、ステップS111と同様に、操作指令と、入力されている入力要素212の情報と、操作器ディスプレイ211の画像データとを、情報処理装置131に送信する(ステップS212)。受講者Sによる操作の入力がない場合(ステップS211でNo)、ステップS218に進む。
に進む。 When the student S inputs an operation to operate the
Proceed to.
ステップS213~S221の処理は、ロボット操作の実技教育のステップS113~S121の処理と同様である。The processing in steps S213 to S221 is the same as the processing in steps S113 to S121 in the practical training of robot operation.
ロボット110を用いた全ての教示点の設定が終了すると、受講者Sは、教示データの内容のチェックの実行を許可対象の受講者操作器210に入力し(ステップS222でYes)、受講者操作器210は、チェック実行の指令を、サーバ310等を介して情報処理装置131に送信する(ステップS223)。情報処理装置131は、教示データに従った操作指令をロボットコントローラ132に送信し(ステップS224)、ロボットコントローラ132は、操作指令に従った駆動指令をロボット110及び周辺機器120に出力する。受講者Sは、受講者エリアディスプレイ240に写し出される撮像装置161及び/又は162の撮像画像により、ロボット110及び周辺機器120の動作を確認することができる。When setting of all teaching points using the
チェック実行の指令が受講者操作器210に入力されない場合(ステップS222でNо)、ステップS211に戻る。If a command to perform the check is not input to the student operator 210 (No in step S222), return to step S211.
受講者Sは、教示データの編集が必要であれば、教示データの編集の実行を許可対象の受講者操作器210に入力し(ステップS224でYes)、受講者操作器210は、チェック実行の指令を、サーバ310等を介して情報処理装置131に送信する(ステップS225)。情報処理装置131は、教示データの編集を実行するプログラムを起動し(ステップS226)、ステップS211に進む。If the student S needs to edit the teaching data, he/she inputs a command to edit the teaching data to the
また、教示データの編集の実行が受講者操作器210に入力されない場合、ステップS227に進む。Also, if the instruction to edit the teaching data is not input to the
ステップS227~S234の処理は、ロボット操作の実技教育のステップS122~S129の処理と同様である。The processing in steps S227 to S234 is similar to the processing in steps S122 to S129 in the practical training of robot operation.
[学科教育]
学科教育での動作を説明する。図7は、実施の形態に係る学科教育での教育システム1の動作の一例を示すシーケンス図である。図7に示すように、まず、講師Lは、講師操作器140を操作し、学科教育のアプリケーションプログラムを起動し、講師操作器140は起動の通知をサーバ310に送信する(ステップS301)。サーバ310は、当該学科教育に参加予定の受講者Sの受講者操作器210に参加許可の通知を送信する(ステップS302)。 [Academic education]
The operation in the academic education will be described. Fig. 7 is a sequence diagram showing an example of the operation of the
各受講者Sは、受講者操作器210を操作し、当該学科教育のアプリケーションプログラムを起動し、ログインする(ステップS303)。サーバ310はログイン情報を講師操作器140に送信する(ステップS304)。Each student S operates the
講師Lは、講師操作器140に、講師操作器140の操作器ディスプレイ141の画面を各受講者操作器210の操作器ディスプレイ211において共有する指令を入力し、講師操作器140は、当該指令を情報処理装置131に送信する(ステップS305)。The instructor L inputs a command to the
情報処理装置131は、講師操作器140の操作器ディスプレイ141の画像のデータである画面データを、サーバ310に送信し(ステップS306)、サーバ310は、当該画面データを各受講者操作器210に送信する(ステップS307)。The
さらに、情報処理装置131は、撮像装置163の撮像画像のデータ、及び、マイク180の音声データをサーバ310に送信し(ステップS308)、サーバ310は、当該データを各受講者操作器210の受講者通信装置220に送信する(ステップS309)。各受講者通信装置220は、受信した画像データ及び音声データをそれぞれ、受講者エリアディスプレイ240及びスピーカ260に出力する。Furthermore, the
また、各受講者通信装置220は、撮像装置230の撮像画像のデータ、及び、マイク250の音声データを、サーバ310等を介して情報処理装置131に送信する(ステップS310)。情報処理装置131は、受信した画像データ及び音声データをそれぞれ、講師エリアディスプレイ170及びスピーカ190に出力する。In addition, each
よって、各受講者Sは、講師Lと、互いの姿及び声を確認してコミュニケーションをとりつつ、受講者操作器210の操作器ディスプレイ211において、講師操作器140の操作器ディスプレイ141の画面と同じ画面を用いて講師Lの講義を受けることができる。As a result, each student S can communicate with the instructor L by seeing and hearing each other, while receiving the lecture from the instructor L using the same screen on the
講師Lが、プログラムを終了する指令を講師操作器140に入力すると(ステップS311でYes)、講師操作器140は、当該指令を情報処理装置131に送信する(ステップS312)。情報処理装置131は、プログラムを終了の通知をサーバ310に送信し(ステップS313)、サーバ310は、当該通知を全ての受講者操作器210に送信する(ステップS314)。情報処理装置131はプログラムを終了する(ステップS315)。講師操作器140がプログラムを終了する指令を受け取らない場合(ステップS311でNo)、ステップS311を繰り返す。When instructor L inputs a command to end the program to the instructor operator 140 (Yes in step S311), the
[教育終了認定]
教育終了の認定での動作を説明する。これに限定されないが、本実施の形態では、教育システム1は、学科教育のテストを実施後に、教育終了の認定を行う。なお、教育システム1は、学科教育のテストの実施と教育終了の認定とを別々に実施するように構成されてもよい。図8は、実施の形態に係る教育終了の認定での教育システム1の動作の一例を示すシーケンス図である。図8に示すように、まず、受講者Sは、受講者操作器210を操作し、学科教育のテストのアプリケーションプログラムを起動し、ログインする(ステップS401)。サーバ310は、テスト用のデータを受講者操作器210に送信する(ステップS402)。これにより、受講者操作器210の操作器ディスプレイ211には、解答の入力が可能であるテスト用の画面が表示される。 [Certification of Completion of Education]
The operation of certifying the completion of education will be described. In this embodiment, the
受講者Sは、操作器ディスプレイ211に表示される画面に従って、受講者操作器210の入力要素212を用いて解答を入力する(ステップS403)。Student S inputs his/her answer using the
受講者操作器210は、テスト中、内蔵するクロック等で計時し、時刻がテストの制限時刻に達すると(ステップS404でYes)、テストを終了し、受講者Sによって入力された解答のデータをサーバ310に送信する(ステップS405)。時刻がテストの制限時刻に達していない場合(ステップS404でNo)、ステップS403~S404が繰り返される。During the test, the
サーバ310は、記憶している正答のデータと受信した解答のデータとを比較し、記憶している評価基準に基づき、受講者Sの解答に対する点数等の評価を決定する(ステップS406)。つまり、サーバ310は、受講者Sに対する学科教育の評価を決定する。The
サーバ310は、情報処理装置131に受講者Sの実技教育の評価を要求し(ステップS407)、情報処理装置131は、講師Lによって講師操作器140を用いて入力されて記憶している受講者Sの実技教育の評価の情報をサーバ310に送信する(ステップS408)。例えば、受講者Sの実技教育の評価は、実技教育を終了したときに講師Lによって講師操作器140に入力される。The
サーバ310は、学科教育の評価と、実技教育の評価と、サーバ310に記憶されている教育終了の認定の判定基準とを用いて、受講者Sに対する教育終了の認定の可否を決定する(ステップS409)。サーバ310は、認定結果を当該受講者Sの受講者操作器210に送信し(ステップS410)、プログラムを終了する(ステップS411)。The
なお、情報処理装置131が、ステップS401~S410のサーバ310の処理の少なくとも一部を実行するように構成されてもよい。例えば、情報処理装置131は、サーバ310を介さずに受講者操作器210と接続されるように構成されてもよい。この場合、情報処理装置131は、サーバ310の機能の全てを有する。The
(変形例)
実施の形態では、教育システム1は、講師操作器140において入力されている入力要素142に対応する受講者操作器210の入力要素212を強調要素213を用いて強調し、受講者操作器210において入力されている入力要素212に対応する講師操作器140の入力要素142を強調要素143を用いて強調するように構成される。本変形例では、教育システム1は、講師操作器140において入力されている入力要素142を講師操作器モデルの画像において強調し、受講者操作器210において入力されている入力要素212を受講者操作器モデルの画像において強調するように構成される。以下、本変形例について、実施の形態と異なる点を中心に説明し、実施の形態と同様の点の説明を適宜省略する。 (Modification)
In the embodiment, the
情報処理装置131は、講師操作器140が2次元モデル又は3次元モデルにモデル化された講師操作器モデルの情報と、受講者操作器210が2次元モデル又は3次元モデルにモデル化された受講者操作器モデルの情報とを記憶する。The
各操作器モデルの情報は、操作器140又は210の外観に対応する操作器モデルの外観、操作器ディスプレイ141又は211に対応する構成、配置及び表示画面を有するディスプレイモデル、入力要素142又は212に対応する構成及び配置を有する入力要素モデル、強調要素143又は213に対応する構成及び配置を有する強調要素モデル、トリガスイッチ144又は214に対応する構成及び配置を有するトリガスイッチモデル、並びに、緊急停止スイッチ145又は215に対応する構成及び配置を有する緊急停止スイッチモデル等の情報を含んでもよい。The information for each controller model may include information such as the appearance of the controller model corresponding to the appearance of the
情報処理装置131は、講師操作器モデルの画像のデータを生成し、受講者エリアディスプレイ240に送信し表示させる。情報処理装置131は、受講者操作器モデルの画像のデータを生成し、講師エリアディスプレイ170及び/又は受講者エリアディスプレイ240に送信し表示させる。情報処理装置131は、講師操作器140から受け取る各入力要素142の出力信号を講師操作器モデルの画像のデータに反映し、受講者操作器210から受け取る各入力要素212の出力信号を受講者操作器モデルの画像のデータに反映する。The
具体的には、情報処理装置131は、講師操作器モデルの画像のデータにおいて、講師操作器モデルの入力要素モデルのうち、入力を受けている入力要素142に対応する入力要素モデルを強調する。情報処理装置131は、受講者操作器モデルの画像のデータにおいて、受講者操作器モデルの入力要素モデルのうち、入力を受けている入力要素212に対応する入力要素モデルを強調する。例えば、情報処理装置131は、入力要素モデルの色、模様及びテクスチャ等の変更、入力要素モデルの点滅、発光又は変形、図形及び記号等の追加などにより、入力要素モデルを強調してもよい。Specifically, in the data of the image of the instructor operator model, the
さらに、これに限定されないが、本変形例では、情報処理装置131は、講師操作器モデルの画像と撮像装置161~163のうちの選択された撮像装置によって撮像された画像とを一緒に示す画像のデータを生成する。例えば、情報処理装置131は、図9に示すような第1ディスプレイ画像IAを受講者エリアディスプレイ240に表示させる。図9は、受講者エリアディスプレイ240に表示される画像の一例を示す図である。第1ディスプレイ画像IAは、講師Lの像Ldと、ロボット110の像110dと、講師操作器モデルの像140Mdとを示し、入力要素モデルの像142dのうちの1つが強調表示される。本例では、強調要素モデルは含まれない。Furthermore, although not limited to this, in this modified example, the
また、情報処理装置131は、受講者操作器モデルの画像と受講者操作器モデルに対応する撮像装置230によって撮像された画像とを一緒に示す画像のデータを生成する。受講者操作器モデルに対応する撮像装置230は、当該受講者操作器モデルに対応する受講者操作器210の受講者通信装置220と接続されている。例えば、情報処理装置131は、図10に示すような第2ディスプレイ画像IBを講師エリアディスプレイ170に表示させる。図10は、講師エリアディスプレイ170に表示される画像の一例を示す図である。第2ディスプレイ画像IBは、受講者Sの像Sdと、受講者操作器モデルの像210Mdとを示し、入力要素モデルの像212dのうちの1つが強調表示される。本例では、強調要素モデルは含まれない。The
また、情報処理装置131は、受講者操作器モデルの画像と撮像装置161~163のうちの選択された撮像装置によって撮像された画像とを一緒に示す画像のデータを生成する。例えば、情報処理装置131は、図11に示すような第3ディスプレイ画像ICを受講者エリアディスプレイ240に表示させる。図11は、受講者エリアディスプレイ240に表示される画像の一例を示す図である。第3ディスプレイ画像ICは、講師Lの像Ldと、ロボット110の像110dと、受講者操作器モデルの像210Mdとを示し、入力要素モデルの像212dのうちの1つが強調表示される。本例では、強調要素モデルは含まれない。The
情報処理装置131は、第1ディスプレイ画像IA等の講師操作器モデルの画像のデータを、制御装置130への入力許可を受けている受講者操作器210に対応する受講者エリアディスプレイ240に少なくとも表示させ、本変形例では、全ての受講者操作器210に対応する受講者エリアディスプレイ240に表示させる。受講者操作器210に対応する受講者エリアディスプレイ240は、当該受講者操作器210の受講者通信装置220と接続されている。The
情報処理装置131は、上記入力許可を受けている受講者操作器210に対応する受講者操作器モデルの画像のデータを、講師エリアディスプレイ170に少なくとも表示させ、本変形例では、さらに、上記受講者操作器210以外の受講者操作器210に対応する受講者エリアディスプレイ240にも表示させる。例えば、情報処理装置131は、第2ディスプレイ画像IBのデータを講師エリアディスプレイ170に表示させ、第3ディスプレイ画像ICのデータを、上記入力許可を受けている受講者操作器210以外の受講者操作器210に対応する受講者エリアディスプレイ240に表示させる。情報処理装置131は、第2ディスプレイ画像IBのデータを受講者エリアディスプレイ240に表示させてもよく、第3ディスプレイ画像ICのデータを講師エリアディスプレイ170に表示させてもよい。The
上述のような変形例では、講師L及び受講者Sは、講師エリアディスプレイ170又は受講者エリアディスプレイ240を介して、講師操作器140又は受講者操作器210への入力の状態を容易に視認することができる。さらに、講師操作器140及び受講者操作器210に強調要素143及び213が設けられなくてもよい。これにより、講師操作器140及び受講者操作器210として、既存のティーチングペンダント等の既存の操作器の使用が可能であり、低コスト化が可能である。In the modified example described above, the instructor L and the student S can easily visually confirm the state of the input to the
(その他の実施の形態)
以上、本開示の実施の形態の例について説明したが、本開示は、上記実施の形態及び変形例に限定されない。すなわち、本開示の範囲内で種々の変形及び改良が可能である。例えば、各種変形を実施の形態及び変形例に施したもの、及び、異なる実施の形態及び変形例における構成要素を組み合わせて構築される形態も、本開示の範囲内に含まれる。 Other Embodiments
Although the examples of the embodiments of the present disclosure have been described above, the present disclosure is not limited to the above-mentioned embodiments and modifications. In other words, various modifications and improvements are possible within the scope of the present disclosure. For example, the embodiments and modifications to which various modifications have been applied, and forms constructed by combining components in different embodiments and modifications are also included within the scope of the present disclosure.
例えば、実施の形態及び変形例において、教育システム1は、サーバ310を含むように構成されるが、これに限定されない。教育システム1がサーバ310を含まない場合、制御装置130、例えば、情報処理装置131がサーバ310の機能を有してもよい。For example, in the embodiment and the modified example, the
実施の形態及び変形例において、制御装置130は、情報処理装置131及びロボットコントローラ132を含む。情報処理装置131及びロボットコントローラ132は、別々の装置として構成されてもよく、1つの装置として一体化されてもよい。In the embodiment and the modified example, the
実施の形態及び変形例において、教育システム1は、ロボット110の操作及び制御プログラムの生成の教育に用いられるように構成されるが、これに限定されない。教育システム1は、ロボットに関する様々な業務の教育に用いることができ、例えば、ロボット110の点検、メンテナンス及び修理等の教育に用いることができる。In the embodiment and the modified example, the
また、本開示の技術の各態様例は、以下のように挙げられる。本開示の一態様に係る教育システムは、リモートアクセス環境でのロボットに関する業務の教育のための教育システムであって、講師エリアに配置されるロボットと、前記講師エリアに配置される制御装置と、前記制御装置とデータ通信可能に前記講師エリアに配置され、前記講師エリアの講師の入力を受け付け、前記講師の入力に従った指令を前記制御装置に出力する講師操作器と、前記講師エリアに配置され且つ前記制御装置を通信ネットワークにデータ通信可能に接続する講師通信装置と、受講者エリアに配置され、前記受講者エリアの受講者の入力を受け付け、前記受講者の入力に従った指令を出力する受講者操作器と、前記受講者エリアに配置され且つ前記受講者操作器を前記通信ネットワークにデータ通信可能に接続する受講者通信装置とを備え、前記受講者操作器は、前記受講者通信装置、前記通信ネットワーク及び前記講師通信装置を介して、前記制御装置及び前記講師操作器とデータ通信可能に接続され、前記講師操作器は、前記受講者操作器から前記制御装置への指令の入力許可の指令を、前記制御装置と前記受講者操作器とに送信し、前記制御装置は、前記ロボットの動作を制御可能であり、前記入力許可を受けている状態の前記受講者操作器から受け取る指令に従って、前記ロボットに動作させる。Examples of each aspect of the technology disclosed herein are given below. An educational system according to one aspect of the present disclosure is an educational system for teaching robot-related tasks in a remote access environment, comprising a robot arranged in an instructor area, a control device arranged in the instructor area, an instructor operation device arranged in the instructor area capable of data communication with the control device, receiving input from an instructor in the instructor area and outputting commands in accordance with the instructor's input to the control device, an instructor communication device arranged in the instructor area and connecting the control device to a communication network in a data communication manner, and a receiver arranged in a student area, receiving input from a student in the student area and outputting commands in accordance with the student's input. The system includes a lecturer operating device and a lecturer communication device that is placed in the lecturer area and connects the lecturer operating device to the communication network so that data communication is possible, the lecturer operating device is connected to the control device and the lecturer operating device so that data communication is possible via the lecturer communication device, the communication network, and the lecturer communication device, the lecturer operating device transmits a command to the control device and the lecturer operating device to allow input of a command from the lecturer operating device to the control device, the control device is capable of controlling the operation of the robot, and causes the robot to operate according to a command received from the lecturer operating device that has been given the input permission.
上記態様によると、講師操作器と受講者操作器とは、通信ネットワーク及び制御装置を介してデータ通信可能である。受講者は、講師エリアから離れた位置にいる場合でも、通信ネットワークでの通信を介して、ロボットに関する業務の教育を受けることができ、さらに、自身の受講者操作器を用いて、講師エリアのロボットに実際に動作させることができる。また、講師操作器及び受講者操作器はいずれも、通信ネットワークへの通信機能を備えていなくても、互いにネットワーク通信することができる。これにより、講師操作器及び受講者操作器として、ティーチペンダント等の既存の汎用的な操作器の使用が可能である。また、受講者操作器から制御装置への入力許可が講師操作器に依存する。つまり、講師操作器が許可した受講者操作器のみがロボットの動作制御を可能である。よって、講師は、ロボットを操作する受講者をコントロールすることができる。According to the above aspect, the instructor operator and the student operator can communicate data via the communication network and the control device. Even if the student is located far away from the instructor area, they can receive training on robot-related tasks through communication over the communication network, and can actually operate the robot in the instructor area using their own student operator. Furthermore, even if neither the instructor operator nor the student operator has a communication function for the communication network, they can communicate with each other over the network. This makes it possible to use existing general-purpose operators such as teach pendants as the instructor operator and the student operator. Furthermore, permission to input from the student operator to the control device depends on the instructor operator. In other words, only the student operator authorized by the instructor operator can control the operation of the robot. Thus, the instructor can control the student who is operating the robot.
本開示の一態様に係る教育システムにおいて、前記講師操作器は、前記受講者操作器の指令に従った前記ロボットの動作に対する指導の入力を受け付け、前記指導の情報を前記受講者操作器に送信するように構成されてもよい。In an educational system according to one aspect of the present disclosure, the instructor operation device may be configured to receive input of instructions for the robot's movements in accordance with the instructions of the student operation device and to transmit the instruction information to the student operation device.
上記態様によると、講師から受講者へのリアルタイムな指導が可能である。具体的には、講師は、受講者の操作に対する指導を当該受講者に送ることができ、受講者は、当該指導を参照して自身の操作を修正することができる。According to the above embodiment, it is possible for the instructor to provide real-time guidance to the student. Specifically, the instructor can send guidance to the student regarding the student's operation, and the student can refer to the guidance and correct his or her own operation.
本開示の一態様に係る教育システムにおいて、前記制御装置は、所定の作業の少なくとも一部を前記ロボットに自動で実行させるための制御プログラムを生成する機能を有するように構成され、前記入力許可を受けている状態の前記受講者操作器から受け取る指令に従って、前記制御プログラムを生成してもよい。In an educational system according to one aspect of the present disclosure, the control device may be configured to have a function of generating a control program for causing the robot to automatically execute at least a portion of a predetermined task, and may generate the control program according to a command received from the student operating device that has been granted input permission.
上記態様によると、受講者は、講師エリアから離れた位置にいる場合でも、自身の受講者操作器を用いて、ロボットの制御プログラムを生成する教育を受けることができる。例えば、受講者は、制御プログラムの一例として、ロボットに所定の作業を実行させるための教示データを生成する教育を受けることができる。教示データ等の制御プログラムは、制御装置によって生成されるため、受講者は、当該制御プログラムを制御装置に実行させ、ロボットに実際に動作させて、当該受講者によって生成された制御プログラムの内容を確認することができる。According to the above aspect, even if a student is located away from the instructor's area, the student can receive training in generating a control program for a robot using his/her own student controller. For example, the student can receive training in generating teaching data for causing a robot to perform a specific task, as an example of a control program. Since a control program such as teaching data is generated by a control device, the student can have the control device execute the control program, and actually operate the robot, thereby checking the contents of the control program generated by the student.
本開示の一態様に係る教育システムにおいて、前記講師操作器及び前記受講者操作器はそれぞれ、画像を出力表示可能な操作器ディスプレイを有し、前記制御装置は、前記入力許可を受けている状態の前記受講者操作器の前記操作器ディスプレイに表示される画像のデータを前記講師操作器に送信するように構成され、前記講師操作器は、前記画像のデータを前記講師操作器の前記操作器ディスプレイに表示可能であってもよい。In an educational system according to one aspect of the present disclosure, the instructor operator and the student operator each have an operator display capable of outputting and displaying an image, and the control device is configured to transmit image data displayed on the operator display of the student operator in a state in which the input permission has been granted to the instructor operator, and the instructor operator may be capable of displaying the image data on the operator display of the instructor operator.
上記態様によると、受講者操作器の操作器ディスプレイの画像が、講師操作器の操作器ディスプレイにおいて共有される。講師は、ロボットに動作させるために受講者が受講者操作器に入力しているときに受講者操作器の操作器ディスプレイに表示される内容を、講師操作器の操作器ディスプレイを介してリアルタイムに視認することができる。講師は、講師操作器の操作器ディスプレイの画像と講師エリアでのロボットの動作とに基づき、受講者の各入力内容の良否をリアルタイムに判断することができ、当該判断に基づき受講者を指導することができる。よって、講師から受講者への的確な指導が可能になる。According to the above aspect, an image of the controller display of the student controller is shared on the controller display of the instructor controller. The instructor can visually check in real time, via the controller display of the instructor controller, the content displayed on the controller display of the student controller when the student is inputting information into the student controller to cause the robot to operate. The instructor can judge in real time whether each input content made by the student is acceptable or not based on the image on the controller display of the instructor controller and the operation of the robot in the instructor area, and can provide guidance to the student based on that judgment. This enables the instructor to provide accurate guidance to the student.
本開示の一態様に係る教育システムにおいて、前記講師操作器及び前記受講者操作器はそれぞれ、画像を出力表示可能な操作器ディスプレイを有し、前記制御装置は、前記講師操作器の前記操作器ディスプレイに表示される画像のデータを前記受講者操作器に送信するように構成され、前記受講者操作器は、前記画像のデータを前記受講者操作器の前記操作器ディスプレイに表示可能であってもよい。In an educational system according to one aspect of the present disclosure, the instructor operator and the student operator each have an operator display capable of outputting and displaying an image, the control device is configured to transmit image data displayed on the operator display of the instructor operator to the student operator, and the student operator may be capable of displaying the image data on the operator display of the student operator.
上記態様によると、講師操作器のディスプレイの画像が、受講者操作器の操作器ディスプレイにおいて共有される。講師は、ロボットに動作させるために自身が講師操作器に入力しているときに講師操作器の操作器ディスプレイに表示される内容を、受講者操作器の操作器ディスプレイを介してリアルタイムに受講者に視認させることができる。よって、受講者は、講師による操作の手本を学ぶことができる。さらに、ロボットに動作させるために受講者が受講者操作器に入力しているとき、講師は、より適切な操作を講師操作器に入力し、講師操作器の操作器ディスプレイに表示される操作の内容を、受講者操作器の操作器ディスプレイを介して受講者に視認させることができる。よって、講師は、受講者の入力をより適切な入力に誘導することができる。According to the above aspect, an image of the display of the instructor's controller is shared on the controller display of the student's controller. The instructor can make the student see in real time, via the controller display of the student's controller, the content displayed on the controller display of the instructor's controller when the instructor is inputting into the instructor's controller to operate the robot. Thus, the student can learn from the instructor's example of operation. Furthermore, when the student is inputting into the student's controller to operate the robot, the instructor can input a more appropriate operation into the instructor's controller and make the student see the content of the operation displayed on the controller display of the instructor's controller via the controller display of the student's controller. Thus, the instructor can guide the student's input to a more appropriate input.
本開示の一態様に係る教育システムにおいて、前記講師操作器は、前記講師による入力が可能である複数の講師入力要素と、前記複数の講師入力要素のそれぞれを個別に強調表示する講師強調装置とを有し、前記受講者操作器は、前記受講者による入力が可能であり且つ前記複数の講師入力要素に対応する複数の受講者入力要素と、前記複数の受講者入力要素のそれぞれを個別に強調表示する受講者強調装置とを有し、前記制御装置は、入力を受けている前記講師入力要素の情報を前記受講者操作器に送信し、入力を受けている前記受講者入力要素の情報を前記講師操作器に送信するように構成され、前記受講者操作器は、入力を受けている前記講師入力要素に対応する前記受講者入力要素を前記受講者強調装置に強調表示させるように構成され、前記講師操作器は、入力を受けている前記受講者入力要素に対応する前記講師入力要素を前記講師強調装置に強調表示させるように構成されてもよい。In an educational system according to one aspect of the present disclosure, the instructor operation device has a plurality of instructor input elements that can be input by the instructor and an instructor emphasis device that individually highlights each of the plurality of instructor input elements, the student operation device has a plurality of student input elements that can be input by the student and that correspond to the plurality of instructor input elements and an instructor emphasis device that individually highlights each of the plurality of student input elements, the control device is configured to transmit information on the instructor input elements that are being input to the student operation device and transmit information on the student input elements that are being input to the instructor operation device, the student operation device is configured to cause the student emphasis device to highlight the student input element that corresponds to the instructor input element that is being input, and the instructor operation device may be configured to cause the instructor emphasis device to highlight the instructor input element that corresponds to the student input element that is being input.
上記態様によると、講師操作器において入力される講師入力要素の情報が、受講者操作器において共有され、受講者操作器において入力される受講者入力要素の情報が、講師操作器において共有される。講師は、受講者が入力している受講者入力要素を、講師操作器において強調表示される講師入力要素を介して確認することができる。受講者は、講師が入力している講師入力要素を、受講者操作器において強調表示される受講者入力要素を介して確認することができる。講師は、講師入力要素へ入力することによって、受講者入力要素への入力の手本を受講者に示すことができる。さらに、講師は、受講者による受講者入力要素への入力を視認しつつ、講師入力要素へ入力し、より適切な受講者入力要素の入力を誘導することができる。According to the above aspect, information on the instructor input element input on the instructor operation device is shared on the student operation device, and information on the student input element input on the student operation device is shared on the instructor operation device. The instructor can check the student input element being input by the student through the instructor input element highlighted on the instructor operation device. The student can check the instructor input element being input by the instructor through the student input element highlighted on the student operation device. By inputting into the instructor input element, the instructor can show the student an example of how to input into the student input element. Furthermore, the instructor can input into the instructor input element while visually checking the input by the student into the student input element, thereby guiding the student to input a more appropriate student input element.
本開示の一態様に係る教育システムは、前記制御装置とデータ通信可能に前記講師エリアに配置される講師エリアディスプレイと、前記受講者エリアに配置され且つ前記受講者通信装置によって前記通信ネットワークにデータ通信可能に接続される受講者エリアディスプレイとをさらに備え、前記講師操作器は、前記講師による入力が可能である複数の講師入力要素を有し、前記受講者操作器は、前記受講者による入力が可能である複数の受講者入力要素を有し、前記制御装置は、入力を受けている前記講師入力要素に対応する講師入力要素モデルの像が強調された講師操作器モデルの画像のデータを生成し前記受講者エリアディスプレイに送信し表示させ、前記制御装置は、入力を受けている前記受講者入力要素に対応する受講者入力要素モデルの像が強調された受講者操作器モデルの画像のデータを生成し前記講師エリアディスプレイに送信し表示させてもよい。The education system according to one aspect of the present disclosure further includes a lecturer area display arranged in the lecturer area so as to be capable of data communication with the control device, and a lecturer area display arranged in the lecturer area and connected to the communication network so as to be capable of data communication by the lecturer communication device, the lecturer operation device has a plurality of lecturer input elements that can be input by the lecturer, the lecturer operation device has a plurality of lecturer input elements that can be input by the lecturer, the control device may generate image data of a lecturer operation device model in which an image of a lecturer input element model corresponding to the lecturer input element receiving input is highlighted, and transmit it to the lecturer area display for display, and the control device may generate image data of a lecturer operation device model in which an image of a lecturer input element model corresponding to the lecturer input element receiving input is highlighted, and transmit it to the lecturer area display for display.
上記態様によると、講師操作器において入力される講師入力要素の情報が、受講者エリアディスプレイにおいて共有され、受講者操作器において入力される受講者入力要素の情報が、講師エリアディスプレイにおいて共有される。講師は、受講者が入力している受講者入力要素を、講師エリアディスプレイの画像において強調される受講者入力要素モデルを介して確認することができる。受講者は、講師が入力している講師入力要素を、受講者エリアディスプレイの画像において強調される講師入力要素モデルを介して確認することができる。講師は、講師入力要素へ入力することによって、受講者入力要素への入力の手本を受講者に示すことができる。さらに、講師は、受講者による受講者入力要素への入力を視認しつつ、講師入力要素へ入力し、より適切な受講者入力要素の入力を誘導することができる。また、各操作器の強調装置の一部又は全部を省略することも可能であり、原価低減が図れる。According to the above aspect, information on the instructor input element inputted into the instructor operation device is shared in the student area display, and information on the student input element inputted into the student operation device is shared in the instructor area display. The instructor can confirm the student input element being inputted by the student through the student input element model highlighted in the image on the instructor area display. The student can confirm the instructor input element being inputted by the instructor through the instructor input element model highlighted in the image on the student area display. By inputting into the instructor input element, the instructor can show the student an example of inputting into the student input element. Furthermore, the instructor can input into the instructor input element while visually checking the input by the student into the student input element, thereby guiding the student to input a more appropriate student input element. In addition, it is also possible to omit some or all of the highlighting device of each operation device, thereby reducing costs.
本開示の一態様に係る教育システムにおいて、少なくとも1つの前記受講者エリアに配置される少なくとも2つの前記受講者操作器と、前記少なくとも1つの受講者エリアに配置され且つ前記少なくとも2つの受講者操作器それぞれを前記通信ネットワークにデータ通信可能に接続する少なくとも2つの前記受講者通信装置とを備え、前記講師操作器は、前記入力許可の指令を、前記少なくとも2つの受講者操作器のうちの第1受講者操作器と前記制御装置とに送信し、前記制御装置は、前記第1受講者操作器から受け取る指令に従って、前記ロボットに動作させてもよい。In an educational system according to one aspect of the present disclosure, at least two of the student operating devices are arranged in at least one of the student areas, and at least two of the student communication devices are arranged in the at least one of the student areas and connect the at least two student operating devices to the communication network so that data communication is possible. The instructor operating device transmits the input permission command to a first student operating device of the at least two student operating devices and to the control device, and the control device may operate the robot according to the command received from the first student operating device.
上記態様によると、講師は、講師操作器を操作することによって、複数の受講者操作器のうちの1つを任意に選択し、選択された受講者操作器に入力許可を与えることができる。これにより、複数の受講者操作器が同時にロボットを操作でき、ロボットが意図しない動作をすることが回避される。よって、ロボットの安全な動作が可能である。According to the above aspect, the instructor can operate the instructor operation device to arbitrarily select one of the multiple student operation devices and give input permission to the selected student operation device. This allows multiple student operation devices to operate the robot simultaneously, preventing the robot from performing unintended operations. This allows the robot to operate safely.
本開示の一態様に係る教育システムにおいて、前記講師操作器及び前記少なくとも2つの受講者操作器はそれぞれ、画像を出力表示可能な操作器ディスプレイを有し、前記制御装置は、前記第1受講者操作器の前記操作器ディスプレイに表示される画像のデータである第1画像データを、前記第1受講者操作器以外の前記受講者操作器である第2受講者操作器と前記講師操作器とに送信し、前記第2受講者操作器及び前記講師操作器は、前記第1画像データをそれぞれの前記操作器ディスプレイに表示可能であってもよい。In an educational system according to one aspect of the present disclosure, the instructor operator and the at least two student operator each have an operator display capable of outputting and displaying an image, and the control device transmits first image data, which is data of an image displayed on the operator display of the first student operator, to a second student operator that is a student operator other than the first student operator and to the instructor operator, and the second student operator and the instructor operator may be capable of displaying the first image data on their respective operator displays.
上記態様によると、入力許可を受けている受講者操作器の操作器ディスプレイの画像が、他の受講者操作器及び講師操作器の操作器ディスプレイにおいて共有される。ロボットに動作させるために受講者が受講者操作器に入力しているときに当該受講者操作器の操作器ディスプレイに表示される内容が、講師及び他の受講者によってリアルタイムに視認可能である。他の受講者は、自身が行っていない入力内容及び講師によって指導を受ける当該入力内容をリアルタイムに視認することができる。According to the above aspect, an image on the controller display of the student controller that has been given permission to input is shared among the controller displays of the other student controllers and the instructor controller. When the student is inputting into the student controller to operate the robot, the content displayed on the controller display of the student controller can be viewed in real time by the instructor and other students. The other students can view in real time the input content that they have not made and the input content that they are being guided by the instructor.
本開示の一態様に係る教育システムにおいて、前記講師操作器及び前記少なくとも2つの受講者操作器はそれぞれ、画像を出力表示可能な操作器ディスプレイを有し、前記制御装置は、前記講師操作器の前記操作器ディスプレイに表示される画像のデータである第2画像データを、前記少なくとも2つの受講者操作器に送信し、前記少なくとも2つの受講者操作器は、前記第2画像データをそれぞれの前記操作器ディスプレイに表示可能であってもよい。In an educational system according to one aspect of the present disclosure, the instructor operator and the at least two student operator devices each have an operator display capable of outputting and displaying an image, and the control device transmits second image data, which is data for an image displayed on the operator display of the instructor operator, to the at least two student operator devices, and the at least two student operator devices may be capable of displaying the second image data on their respective operator displays.
上記態様によると、講師操作器の操作器ディスプレイの画像が、全ての受講者操作器の操作器ディスプレイにおいて共有される。全ての受講者は、講師が講師操作器に入力しているときに当該講師操作器の操作器ディスプレイに表示される内容を、手本として視認することができる。According to the above embodiment, the image on the controller display of the instructor controller is shared among the controller displays of all of the student controllers. All of the student controllers can visually confirm, as a model, the content displayed on the controller display of the instructor controller when the instructor is inputting information into the instructor controller.
本開示の一態様に係る教育システムにおいて、前記講師操作器は、前記講師による入力が可能である複数の講師入力要素と、前記複数の講師入力要素のそれぞれを個別に強調表示する講師強調装置とを有し、前記少なくとも2つの受講者操作器はそれぞれ、前記受講者による入力が可能であり且つ前記複数の講師入力要素に対応する複数の受講者入力要素と、前記複数の受講者入力要素のそれぞれを個別に強調表示する受講者強調装置とを有し、前記制御装置は、入力を受けている前記講師入力要素の情報を、前記少なくとも2つの受講者操作器のうちの前記入力許可を受けている状態の前記受講者操作器に少なくとも送信し、前記入力許可を受けている状態の前記受講者操作器において入力を受けている前記受講者入力要素の情報を、前記入力許可を受けている状態の前記受講者操作器以外の前記受講者操作器及び前記講師操作器のうちの少なくとも前記講師操作器に送信するように構成され、前記受講者操作器は、入力を受けている前記講師入力要素に対応する前記受講者入力要素を前記受講者強調装置に強調表示させるように構成され、前記講師操作器は、入力を受けている前記受講者入力要素に対応する前記講師入力要素を前記講師強調装置に強調表示させるように構成されてもよい。In an educational system according to one aspect of the present disclosure, the instructor operation device has a plurality of instructor input elements that can be input by the instructor and an instructor highlighting device that individually highlights each of the plurality of instructor input elements, and the at least two student operation devices each have a plurality of student input elements that can be input by the student and that correspond to the plurality of instructor input elements and a student highlighting device that individually highlights each of the plurality of student input elements, and the control device transmits information about the instructor input elements to the student who is in a state where input permission has been granted among the at least two student operation devices. The student operation device may be configured to transmit information on the student input element being input on the student operation device in the input permission state to at least the instructor operation device among the student operation devices other than the student operation device in the input permission state and the instructor operation device, the student operation device may be configured to cause the student emphasis device to highlight the student input element corresponding to the instructor input element being input, and the instructor operation device may be configured to cause the instructor emphasis device to highlight the instructor input element corresponding to the student input element being input.
上記態様によると、講師操作器において入力される講師入力要素の情報が、入力許可を受けている受講者操作器及び入力許可を受けていない受講者操作器のうちの少なくとも入力許可を受けている受講者操作器において共有される。入力許可を受けている受講者操作器において入力される受講者入力要素の情報が、講師操作器及び入力許可を受けていない受講者操作器のうちの少なくとも講師操作器において共有される。According to the above aspect, information on the instructor input element inputted into the instructor operation device is shared among the student operation devices that have been given input permission and among the student operation devices that have not been given input permission, at least the student operation devices that have been given input permission. Information on the student input element inputted into the student operation device that has been given input permission is shared among the instructor operation device and among the student operation devices that have not been given input permission, at least the instructor operation device.
本開示の一態様に係る教育システムは、前記制御装置とデータ通信可能に前記講師エリアに配置される講師エリアディスプレイと、前記少なくとも1つの受講者エリアのそれぞれに配置され且つ前記受講者通信装置によって前記通信ネットワークにデータ通信可能に接続される少なくとも1つの受講者エリアディスプレイとをさらに備え、前記講師操作器は、前記講師による入力が可能である複数の講師入力要素を有し、前記少なくとも2つの受講者操作器はそれぞれ、前記受講者による入力が可能である複数の受講者入力要素を有し、前記制御装置は、入力を受けている前記講師入力要素に対応する講師入力要素モデルの像が強調された講師操作器モデルの画像のデータを生成し、前記少なくとも1つの受講者エリアディスプレイのうちの前記入力許可を受けている状態の前記受講者操作器に対応する前記受講者エリアディスプレイに少なくとも送信し表示させ、前記制御装置は、前記入力許可を受けている状態の前記受講者操作器において入力を受けている前記受講者入力要素に対応する受講者入力要素モデルの像が強調された受講者操作器モデルの画像のデータを生成し、前記入力許可を受けている状態の前記受講者操作器以外の前記受講者操作器に対応する前記受講者エリアディスプレイ及び前記講師エリアディスプレイのうちの少なくとも前記講師エリアディスプレイに送信し表示させてもよい。The education system according to one aspect of the present disclosure further includes a lecturer area display arranged in the lecturer area so as to be capable of data communication with the control device, and at least one lecturer area display arranged in each of the at least one lecturer areas and connected to the communication network by the lecturer communication device so as to be capable of data communication, the lecturer operation device has a plurality of lecturer input elements that can be input by the lecturer, and the at least two lecturer operation devices each have a plurality of lecturer input elements that can be input by the lecturer, the control device generates image data of a lecturer operation device model in which an image of a lecturer input element model corresponding to the lecturer input element receiving input is highlighted, and transmits and displays at least to the lecturer area display corresponding to the lecturer operation device in the state in which the input permission is received among the at least one lecturer area display, and the control device generates image data of a lecturer operation device model in which an image of a lecturer input element model corresponding to the lecturer input element receiving input on the lecturer operation device in the state in which the input permission is received is highlighted, and transmits and displays at least to the lecturer area display among the lecturer area display and the lecturer area display corresponding to the lecturer operation device other than the lecturer operation device in the state in which the input permission is received.
上記態様によると、講師操作器において入力される講師入力要素の情報が、入力許可を受けている受講者操作器に対応する受講者エリアディスプレイ及び入力許可を受けていない受講者操作器に対応する受講者エリアディスプレイのうちの少なくとも入力許可を受けている受講者操作器に対応する受講者エリアディスプレイにおいて共有される。入力許可を受けている受講者操作器において入力される受講者入力要素の情報が、講師エリアディスプレイ及び入力許可を受けていない受講者操作器に対応する受講者エリアディスプレイのうちの少なくとも講師エリアディスプレイにおいて共有される。According to the above aspect, information on the instructor input element inputted on the instructor operation device is shared at least between the instructor area display corresponding to the instructor operation device that has been given input permission and the instructor area display corresponding to the instructor operation device that has not been given input permission. Information on the instructor input element inputted on the instructor operation device that has been given input permission is shared at least between the instructor area display and the instructor area display corresponding to the instructor operation device that has not been given input permission.
本開示の一態様に係る教育システムは、前記講師エリアに、少なくとも2つの前記講師操作器を備え、前記少なくとも2つの講師操作器は、前記入力許可の指令を前記制御装置及び前記受講者操作器に送信可能であり、前記制御装置は、前記少なくとも2つの講師操作器のうちの選択された前記講師操作器の前記入力許可を受けている状態の前記受講者操作器から受け取る指令に従って、前記ロボットに動作させてもよい。The educational system according to one aspect of the present disclosure includes at least two of the instructor operating devices in the instructor area, and the at least two instructor operating devices are capable of transmitting the input permission command to the control device and the student operating device, and the control device may cause the robot to operate according to a command received from the student operating device that has received the input permission from the instructor operating device selected from the at least two instructor operating devices.
上記態様によると、少なくとも2つの講師操作器のうちの選択された講師操作器が、入力許可を受講者操作器に与えることができる。よって、入力許可が1つの受講者操作器に重複して与えられること、及び、入力許可が複数の受講者操作器に同時に与えられることが回避可能である。さらに、少なくとも2つの講師操作器があることで、複数の講師による教育が可能である。例えば、ロボットの一連の作業の一部の教育がある講師によって担当され、他部の教育が他の講師によって担当され得る。例えば、ロボットの一連の作業に含まれる各動作に熟練の講師が、当該動作を教育することができる。よって、より効果的な教育が可能である。According to the above aspect, a selected instructor operator from among at least two instructor operators can give input permission to the student operator. This makes it possible to avoid duplicate input permission being given to one student operator and input permission being given to multiple student operators simultaneously. Furthermore, the presence of at least two instructor operators makes it possible for multiple instructors to teach. For example, one instructor may be in charge of teaching part of the robot's sequence of operations, and another instructor may be in charge of teaching the other parts. For example, an instructor who is skilled in each of the movements included in the robot's sequence of operations can teach the movements. This makes it possible to provide more effective education.
本開示の一態様に係る教育システムは、前記講師エリアに前記ロボットを撮像可能に配置され且つ前記制御装置とデータ通信可能に接続される撮像装置と、前記受講者エリアに配置され且つ前記受講者通信装置によって前記通信ネットワークにデータ通信可能に接続される受講者エリアディスプレイとをさらに備え、前記制御装置は、前記撮像装置によって撮像された撮像画像のデータを前記受講者エリアディスプレイに送信し表示させてもよい。The educational system according to one aspect of the present disclosure further includes an imaging device arranged in the instructor area so as to be able to capture an image of the robot and connected to the control device so as to be able to perform data communication, and a student area display arranged in the student area and connected to the communication network so as to be able to perform data communication by the student communication device, and the control device may transmit image data captured by the imaging device to the student area display for display.
上記態様によると、講師エリアのロボットの状態を示す撮像装置の画像が受講者エリアディスプレイに表示される。受講者は、当該ディスプレイに表示されるロボット等の画像を視認しつつ、教育を受けることができ、例えば、受講者操作器を操作してロボットに動作させることができる。According to the above embodiment, an image from an imaging device showing the state of the robot in the instructor area is displayed on the student area display. Students can receive education while visually checking the image of the robot or the like displayed on the display, and can, for example, operate the student controller to make the robot operate.
本開示の一態様に係る教育システムは、前記講師に装着されるウェアラブル撮像装置と、前記講師エリアに固定して配置される固定撮像装置とを含む複数の前記撮像装置を備え、前記制御装置は、前記講師操作器への入力に従って、選択された少なくとも1つの前記撮像装置によって撮像された撮像画像のデータを前記受講者エリアディスプレイに送信し表示させてもよい。The education system according to one aspect of the present disclosure includes a plurality of imaging devices including a wearable imaging device worn by the instructor and a fixed imaging device fixedly disposed in the instructor area, and the control device may transmit image data captured by at least one selected imaging device to the student area display in accordance with an input to the instructor operation device, and display the image data.
上記態様によると、受講者エリアディスプレイは、講師の目線等の講師の動作に従って撮像位置及び撮像方向が変わる画像と、講師エリアを写し出し且つ撮像位置が固定された画像とを表示することができる。例えば、受講者は、ウェアラブル撮像装置によって撮像されるロボットの詳細な部分の画像と、固定撮像装置によって撮像されるロボット全体の画像とを視認しつつ、受講者操作器を操作することができる。According to the above aspect, the student area display can display an image in which the imaging position and imaging direction change according to the instructor's movements, such as the instructor's line of sight, and an image that shows the instructor area and has a fixed imaging position. For example, the student can operate the student controller while visually viewing an image of the detailed parts of the robot captured by the wearable imaging device and an image of the entire robot captured by the fixed imaging device.
本開示の一態様に係る教育システムにおいて、前記講師操作器は、前記ロボットへの駆動電力の供給許可の指令及び供給停止の指令を選択的に出力する講師トリガスイッチを有し、前記受講者操作器は、前記ロボットへの駆動電力の供給許可の指令及び供給停止の指令を選択的に出力する受講者トリガスイッチを有し、前記制御装置は、前記講師トリガスイッチ及び前記受講者トリガスイッチの両方から前記供給許可を受けている間、前記受講者操作器から受け取る指令に従って、前記ロボットに動作させてもよい。In an educational system according to one aspect of the present disclosure, the instructor operation device has an instructor trigger switch that selectively outputs a command to allow the supply of drive power to the robot and a command to stop the supply, and the student operation device has a student trigger switch that selectively outputs a command to allow the supply of drive power to the robot and a command to stop the supply, and the control device may operate the robot according to the command received from the student operation device while the control device is receiving the supply permission from both the instructor trigger switch and the student trigger switch.
上記態様によると、受講者トリガスイッチは、受講者が受講者操作器を把持していない状態のような受講者によって受講者トリガスイッチが操作されていない状態で、受講者操作器への意図しない入力によりロボットが動作することを防ぐ。講師トリガスイッチは、講師の許可がない状態で受講者が受講者操作器を用いてロボットに動作させることを防ぐ。よって、ロボットの安全な動作が可能である。なお、ロボットへの駆動電力の供給停止状態は、ロボットへの電力供給が遮断される状態ではなく、ロボットに動作をさせずに待機させておく待機電力が供給される状態であってもよい。According to the above aspect, the student trigger switch prevents the robot from operating due to unintended input to the student operation device when the student trigger switch is not being operated by the student, such as when the student is not holding the student operation device. The instructor trigger switch prevents the student from operating the robot using the student operation device without the instructor's permission. This allows the robot to operate safely. Note that the state in which the supply of drive power to the robot is stopped does not necessarily mean that the power supply to the robot is cut off, but may also mean that standby power is supplied to keep the robot in standby without operating.
本開示の一態様に係る教育システムにおいて、前記講師操作器及び前記受講者操作器はそれぞれ、前記ロボットへの電力供給をシャットダウンすることで前記ロボットを緊急停止させる緊急停止指令を出力する緊急停止スイッチを有し、前記制御装置は、前記講師操作器及び前記受講者操作器の少なくとも一方から前記緊急停止指令を受け取ると、前記ロボットを緊急停止してもよい。In an educational system according to one aspect of the present disclosure, the instructor operator and the student operator each have an emergency stop switch that outputs an emergency stop command to bring the robot to an emergency stop by shutting down the power supply to the robot, and the control device may bring the robot to an emergency stop when it receives the emergency stop command from at least one of the instructor operator and the student operator.
上記態様によると、緊急停止スイッチは、講師操作器及び受講者操作器によってロボットの動作が制御できないような緊急事態の発生時に、ロボットを完全に停止させることができる。講師及び受講者のいずれもが、緊急事態を認めた場合にロボットを完全に停止させることができる。よって、安全な教育の実施が可能である。According to the above embodiment, the emergency stop switch can completely stop the robot in the event of an emergency in which the robot's operation cannot be controlled by the instructor operation device and the student operation device. Both the instructor and the student can completely stop the robot when they recognize an emergency. This allows for safe education.
本開示の一態様に係る教育システムにおいて、前記制御装置は、前記教育の終了の認定のために用いられる認定データを記憶し、前記認定データを用いて前記教育の終了を認定し、認定結果を前記受講者操作器に送信するように構成され、前記制御装置は、前記認定データに含まれる学科教育のテスト用の画像データを前記受講者操作器に送信し、前記受講者操作器から受信する前記テストの解答と前記認定データに含まれる正答とに基づき前記学科教育の評価を決定し、前記認定データに含まれる基準と、前記学科教育の評価の情報と、前記講師操作器から受信する学科教育の評価の情報とを用いて、前記教育の終了を認定し、前記受講者操作器は、画像を出力表示可能な操作器ディスプレイを有し、前記テスト用の画像データを前記受講者操作器の前記操作器ディスプレイに表示し、前記受講者操作器への解答の入力を受け付け、受け付けた前記解答を前記制御装置に送信するように構成され、前記講師操作器は、前記受講者操作器の指令に従った前記ロボットの動作に対する評価の入力を受け付け、前記評価を含む前記実技教育の評価の情報を前記制御装置に送信するように構成されてもよい。In an educational system according to one aspect of the present disclosure, the control device is configured to store certification data used to certify the completion of the education, certify the completion of the education using the certification data, and transmit the certification result to the student operation device, the control device transmits image data for a test of the academic education included in the certification data to the student operation device, determines an evaluation of the academic education based on the answers to the test received from the student operation device and the correct answers included in the certification data, and certifies the completion of the education using the criteria included in the certification data, the evaluation information of the academic education, and the evaluation information of the academic education received from the instructor operation device, the student operation device has an operation device display capable of outputting and displaying images, displays the image data for the test on the operation device display of the student operation device, accepts input of an answer to the student operation device, and transmits the accepted answer to the control device, and the instructor operation device may be configured to accept input of an evaluation of the robot's movement according to the command of the student operation device, and transmits information on the evaluation of the practical training including the evaluation to the control device.
上記態様によると、制御装置は、受講者操作器を介した学科教育のテストの実施及び学科教育の評価を行うことができる。さらに、制御装置は、学科教育の評価と実技教育の評価とに基づき、教育の終了を認定し認定結果を受講者操作器に送ることができる。よって、通信ネットワークを用いた通信により、教育の全てを完結することが可能である。According to the above aspect, the control device can conduct tests on the academic education and evaluate the academic education via the trainee's operating device. Furthermore, the control device can certify the completion of the education based on the evaluation of the academic education and the evaluation of the practical education, and send the certification result to the trainee's operating device. Therefore, it is possible to complete the entire education through communication using the communication network.
本開示の一態様に係る教育システムにおいて、前記講師操作器及び前記受講者操作器は、前記ロボットへの動作の教示用の操作器であってもよい。上記態様によると、実際の作業において使用される教示用の操作器を用いたリモートアクセス環境でのロボットに関する業務の教育が可能になる。実作業と同様の環境での教育が可能になる。In an educational system according to one aspect of the present disclosure, the instructor operation device and the student operation device may be operation devices for teaching the robot how to perform certain actions. According to the above aspect, it becomes possible to teach robot-related tasks in a remote access environment using an instruction operation device that is used in actual work. It becomes possible to teach in an environment similar to actual work.
また、上記で用いた序数、数量等の数字は、全て本開示の技術を具体的に説明するために例示するものであり、本開示は例示された数字に制限されない。また、構成要素間の接続関係は、本開示の技術を具体的に説明するために例示するものであり、本開示の機能を実現する接続関係はこれに限定されない。In addition, all of the ordinal numbers, quantities, and other numbers used above are provided as examples to specifically explain the technology of the present disclosure, and the present disclosure is not limited to the exemplified numbers. In addition, the connection relationships between the components are provided as examples to specifically explain the technology of the present disclosure, and the connection relationships that realize the functions of the present disclosure are not limited to these.
1 教育システム
110 ロボット
111 ロボットアーム
112 エンドエフェクタ
130 制御装置
131 情報処理装置
132 ロボットコントローラ
140 講師操作器
141 操作器ディスプレイ
142 入力要素
143 強調要素
144 トリガスイッチ
145 緊急停止スイッチ
150 講師通信装置
161~163,230 撮像装置
170 講師エリアディスプレイ
210 受講者操作器
211 操作器ディスプレイ
212 入力要素
213 強調要素
214 トリガスイッチ
215 緊急停止スイッチ
220 受講者通信装置
240 受講者エリアディスプレイ
310 サーバ
AL 講師エリア
AS 受講者エリア
N 通信ネットワーク
1
Claims (17)
Translated fromJapanese講師エリアに配置されるロボットと、
前記講師エリアに配置される制御装置と、
前記制御装置とデータ通信可能に前記講師エリアに配置され、前記講師エリアの講師の入力を受け付け、前記講師の入力に従った指令を前記制御装置に出力する講師操作器と、
前記講師エリアに配置され且つ前記制御装置を通信ネットワークにデータ通信可能に接続する講師通信装置と、
受講者エリアに配置され、前記受講者エリアの受講者の入力を受け付け、前記受講者の入力に従った指令を出力する受講者操作器と、
前記受講者エリアに配置され且つ前記受講者操作器を前記通信ネットワークにデータ通信可能に接続する受講者通信装置とを備え、
前記受講者操作器は、前記受講者通信装置、前記通信ネットワーク及び前記講師通信装置を介して、前記制御装置及び前記講師操作器とデータ通信可能に接続され、
前記講師操作器は、前記受講者操作器から前記制御装置への指令の入力許可の指令を、前記制御装置と前記受講者操作器とに送信し、
前記制御装置は、前記ロボットの動作を制御可能であり、前記入力許可を受けている状態の前記受講者操作器から受け取る指令に従って、前記ロボットに動作させ、
前記講師操作器は、緊急停止入力部を含み、前記緊急停止入力部へ入力を受けると緊急停止指令を前記制御装置又は前記制御装置が備えるロボットコントローラに出力し、
前記制御装置は、前記緊急停止指令を受けると、前記受講者操作器による前記ロボットの操作を禁止し、
前記講師操作器は、前記講師による入力が可能である複数の講師入力要素と、前記複数の講師入力要素のそれぞれを個別に強調表示する講師強調装置とを有し、
前記受講者操作器は、前記受講者による入力が可能であり且つ前記複数の講師入力要素に対応する複数の受講者入力要素と、前記複数の受講者入力要素のそれぞれを個別に強調表示する受講者強調装置とを有し、
前記制御装置は、入力を受けている前記講師入力要素の情報を前記受講者操作器に送信し、入力を受けている前記受講者入力要素の情報を前記講師操作器に送信するように構成され、
前記受講者操作器は、入力を受けている前記講師入力要素に対応する前記受講者入力要素を前記受講者強調装置に強調表示させるように構成され、
前記講師操作器は、入力を受けている前記受講者入力要素に対応する前記講師入力要素を前記講師強調装置に強調表示させるように構成される
教育システム。 An educational system for teaching robot-related tasks in a remote access environment, comprising:
A robot placed in the instructor area,
A control device disposed in the instructor area;
an instructor operation device that is disposed in the instructor area so as to be capable of data communication with the control device, receives an input from an instructor in the instructor area, and outputs a command according to the input from the instructor to the control device;
an instructor communication device that is disposed in the instructor area and connects the control device to a communication network so as to be capable of data communication;
a student operation device that is arranged in the student area, receives input from a student in the student area, and outputs a command according to the input from the student;
a participant communication device that is disposed in the participant area and connects the participant operation device to the communication network so as to be capable of data communication;
the student operation device is connected to the control device and the instructor operation device via the student communication device, the communication network, and the instructor communication device so as to be capable of data communication;
The lecturer operation device transmits a command for allowing input of a command from the lecturer operation device to the control device to the control device and the lecturer operation device;
the control device is capable of controlling the movement of the robot, and causes the robot to move in accordance with a command received from the trainee operation device that is in a state in which input is permitted;
The instructor operation device includes an emergency stop input unit, and when an input is received from the emergency stop input unit, the instructor operation device outputs an emergency stop command to the control device or a robot controller included in the control device;
When the control device receives the emergency stop command, the control device prohibits the student operation device from operating the robot,
the instructor operation device includes a plurality of instructor input elements that can be input by the instructor, and an instructor highlighting device that individually highlights each of the plurality of instructor input elements;
the student operation device includes a plurality of student input elements which can be input by the student and correspond to the plurality of instructor input elements, and a student highlighting device which individually highlights each of the plurality of student input elements;
The control device is configured to transmit information on the instructor input element that is being input to the student operation device, and to transmit information on the student input element that is being input to the instructor operation device;
The student operation unit is configured to cause the student highlighting device to highlight the student input element corresponding to the instructor input element being input;
The instructor operation unit is configured to cause the instructor highlighting device to highlight the instructor input element corresponding to the student input element being input.
Education system.
請求項1に記載の教育システム。 The education system according to claim1 , wherein the control device causes the robot to operate in accordance with a command received from the trainee operation device when the control device has not received the emergency stop command.
請求項1又は2に記載の教育システム。 The education system according to claim 1or 2 , wherein the instructor operation device is configured to receive an input of instruction for the operation of the robot in accordance with a command from the student operation device, and to transmit information of the instruction to the student operation device.
所定の作業の少なくとも一部を前記ロボットに自動で実行させるための制御プログラムを生成する機能を有するように構成され、
前記受講者操作器から前記制御装置への指令の入力許可を前記講師操作器から受けている状態又は前記制御装置と接続状態である前記受講者操作器から受け取る指令に従って、前記制御プログラムを生成する
請求項1から3のいずれか一項に記載の教育システム。 The control device orthe robot controller includes :
The robot is configured to have a function of generating a control program for causing the robot to automatically execute at least a part of a predetermined task,
The education system according to any one of claims 1 to 3, wherein the control program is generated in accordance with instructions received from the student operator device that has received permission from the instructor operator device to input instructions from the student operator device to the controldevice or that is connected to the control device.
前記制御装置は、前記受講者操作器から前記制御装置への指令の入力許可を前記講師操作器から受けている状態又は前記制御装置と接続状態である前記受講者操作器の前記操作器ディスプレイに表示される画像のデータを前記講師操作器に送信するように構成され、
前記講師操作器は、前記画像のデータを前記講師操作器の前記操作器ディスプレイに表示可能である
請求項1から4のいずれか一項に記載の教育システム。 each of the lecturer operation device and the student operation device has an operation device display capable of outputting and displaying an image;
the control device is configured to transmit to the instructor operation device data of an image displayed on the operation device display of the student operation device that is in a state where it has received permission from the instructor operation device to input a command from the student operation device to the control device or is in a connected state to the control device;
The education system according to claim1 , wherein the instructor controller is capable of displaying the image data on the controller display of the instructor controller.
前記制御装置は、前記講師操作器の前記操作器ディスプレイに表示される画像のデータを前記受講者操作器に送信するように構成され、
前記受講者操作器は、前記画像のデータを前記受講者操作器の前記操作器ディスプレイに表示可能である
請求項1から5のいずれか一項に記載の教育システム。 each of the lecturer operation device and the student operation device has an operation device display capable of outputting and displaying an image;
The control device is configured to transmit data of an image displayed on the controller display of the instructor controller to the student controller;
The education system according to claim1 , wherein the student operator is capable of displaying the image data on the operator display of the student operator.
前記受講者エリアに配置され且つ前記受講者通信装置によって前記通信ネットワークにデータ通信可能に接続される受講者エリアディスプレイとをさらに備え、
前記講師操作器は、前記講師による入力が可能である複数の講師入力要素を有し、
前記受講者操作器は、前記受講者による入力が可能である複数の受講者入力要素を有し、
前記制御装置又は前記制御装置が備える情報処理装置は、入力を受けている前記講師入力要素に対応する講師入力要素モデルの像が強調された講師操作器モデルの画像のデータを生成し前記受講者エリアディスプレイに送信し表示させ、
前記制御装置は、入力を受けている前記受講者入力要素に対応する受講者入力要素モデルの像が強調された受講者操作器モデルの画像のデータを生成し前記講師エリアディスプレイに送信し表示させる
請求項1から6のいずれか一項に記載の教育システム。 an instructor area display disposed in the instructor area and capable of data communication with the control device;
a participant area display disposed in the participant area and connected to the communication network by the participant communication device for data communication;
the instructor operation device has a plurality of instructor input elements that can be input by the instructor,
The attendee operation device has a plurality of attendee input elements that can be input by the attendee,
The control device or the information processing device included in the control device generates data of an image of a teacher's controller model in which an image of a teacher's input element model corresponding to the teacher's input element being input is highlighted, and transmits the data to the student area display to display the image.
The educational system according to any one of claims 1 to 6, wherein the control device generates image data of a student operator model in which an image of a student input element model corresponding to the student input element receiving input is highlighted, and transmits the image data to theinstructor area display for display.
前記少なくとも1つの受講者エリアに配置され且つ前記少なくとも2つの受講者操作器それぞれを前記通信ネットワークにデータ通信可能に接続する少なくとも2つの前記受講者通信装置とを備え、
前記講師操作器は、前記受講者操作器から前記制御装置への指令の入力許可の指令を、前記少なくとも2つの受講者操作器のうちの第1受講者操作器と、前記制御装置又は前記制御装置が備える情報処理装置とに送信し、
前記制御装置は、前記第1受講者操作器から受け取る指令に従って、前記ロボットに動作させる
請求項1から7のいずれか一項に記載の教育システム。 At least two of the attendee operating devices disposed in at least one of the attendee areas;
at least two of the participant communication devices are arranged in the at least one participant area and connect the at least two participant operating devices to the communication network so as to be capable of data communication;
the lecturer operation device transmits a command for permitting input of a command from the lecturer operation device to the control device to a first lecturer operation device among the at least two lecturer operation devices and to the control device or an information processing device included in the control device;
The education system according to claim1 , wherein the control device causes the robot to operate in accordance with a command received from the first student operating device.
前記少なくとも1つの受講者エリアのそれぞれに配置され且つ前記受講者通信装置によって前記通信ネットワークにデータ通信可能に接続される少なくとも1つの受講者エリアディスプレイとをさらに備え、
前記講師操作器は、前記講師による入力が可能である複数の講師入力要素を有し、
前記少なくとも2つの受講者操作器はそれぞれ、前記受講者による入力が可能である複数の受講者入力要素を有し、
前記制御装置は、入力を受けている前記講師入力要素に対応する講師入力要素モデルの像が強調された講師操作器モデルの画像のデータを生成し、前記少なくとも1つの受講者エリアディスプレイのうちの前記入力許可を受けている状態の前記受講者操作器に対応する前記受講者エリアディスプレイに少なくとも送信し表示させ、
前記制御装置は、前記入力許可を受けている状態の前記受講者操作器において入力を受けている前記受講者入力要素に対応する受講者入力要素モデルの像が強調された受講者操作器モデルの画像のデータを生成し、前記入力許可を受けている状態又は前記制御装置と接続状態である前記受講者操作器に対応する前記受講者エリアディスプレイ及び前記講師エリアディスプレイのうちの少なくとも前記講師エリアディスプレイに送信し表示させる
請求項8に記載の教育システム。 an instructor area display disposed in the instructor area and capable of data communication with the control device;
at least one attendee area display disposed in each of the at least one attendee area and data communicatively connected to the communications network by the attendee communication device;
the instructor operation device has a plurality of instructor input elements that can be input by the instructor,
Each of the at least two user operators has a plurality of user input elements that can be input by the user;
the control device generates image data of a lecturer operator model in which an image of a lecturer input element model corresponding to the lecturer input element receiving input is highlighted, and transmits the image data to at least one lecturer area display corresponding to the lecturer operator receiving the input permission among the at least one lecturer area display, and causes the lecturer area display to display the image data;
The educational system of claim 8, wherein the control device generates image data of a student operator model in which an image of a student input element model corresponding to the student input element receiving input on the student operator in the input permission-allowed state is emphasized, and transmits and displays the image data to at least the instructor area display of the student area display and the instructor area display corresponding to the student operator in the input permission-allowedstate or connected to the control device.
前記受講者エリアに配置され且つ前記受講者通信装置によって前記通信ネットワークにデータ通信可能に接続される受講者エリアディスプレイとをさらに備え、
前記制御装置又は前記ロボットコントローラは、前記撮像装置によって撮像された撮像画像のデータを前記受講者エリアディスプレイに送信し表示させる
請求項1から9のいずれか一項に記載の教育システム。 an imaging device that is arranged in the instructor area so as to be able to image the robot and is connected to the control device so as to be able to perform data communication;
a participant area display disposed in the participant area and connected to the communication network by the participant communication device for data communication;
The education system according to claim1 , wherein the control device orthe robot controller transmits data of the image captured by the imaging device to the student area display and displays the data.
前記制御装置は、前記講師操作器への入力に従って、選択された少なくとも1つの前記撮像装置によって撮像された撮像画像のデータを前記受講者エリアディスプレイに送信し表示させる
請求項10に記載の教育システム。 The imaging device includes a wearable imaging device worn by the instructor and a fixed imaging device fixedly disposed in the instructor area,
The education system according to claim10 , wherein the control device transmits image data captured by at least one of the selected imaging devices to the student area display in accordance with an input to the instructor operation device, and causes the image data to be displayed on the student area display.
前記受講者操作器は、前記ロボットへの駆動電力の供給許可の指令及び供給停止の指令を選択的に出力する受講者トリガスイッチを有し、
前記制御装置又は前記ロボットコントローラは、前記講師トリガスイッチ及び前記受講者トリガスイッチの両方から前記供給許可を受けている間、前記受講者操作器から受け取る指令に従って、前記ロボットに動作させる
請求項1から11のいずれか一項に記載の教育システム。 the instructor operation device has an instructor trigger switch that selectively outputs a command to permit supply of driving power to the robot or a command to stop supply of driving power to the robot,
the trainee operation device has a trainee trigger switch that selectively outputs a command to permit supply of driving power to the robot and a command to stop supply of driving power to the robot;
The educational system according to any one of claims 1 to 11, wherein the control device orthe robot controller causes the robot to operate in accordance with commands received from the student operator while the control device or the robot controller receives the supply permission from both the instructor trigger switch andthe student trigger switch.
前記制御装置又は前記ロボットコントローラは、前記講師操作器及び前記受講者操作器の少なくとも一方から前記緊急停止指令を受け取ると、前記ロボットを緊急停止する
請求項1から12のいずれか一項に記載の教育システム。 each of the instructor operation device and the student operation device has an emergency stop switch that outputs an emergency stop command to shut down the power supply to the robot, thereby causing the robot to come to an emergency stop,
The education system according to claim1 , wherein the control device orthe robot controller brings the robot to an emergency stop when the control device or the robot controller receives the emergency stop command from at least one of the instructor operation device and the student operation device.
前記制御装置は、前記認定データに含まれる学科教育のテスト用の画像データを前記受講者操作器に送信し、前記受講者操作器から受信する前記テストの解答と前記認定データに含まれる正答とに基づき前記学科教育の評価を決定し、前記認定データに含まれる基準と、前記学科教育の評価の情報と、前記講師操作器から受信する実技教育の評価の情報とを用いて、前記教育の終了を認定し、
前記受講者操作器は、画像を出力表示可能な操作器ディスプレイを有し、前記テスト用の画像データを前記受講者操作器の前記操作器ディスプレイに表示し、前記受講者操作器への解答の入力を受け付け、受け付けた前記解答を前記制御装置に送信するように構成され、
前記講師操作器は、前記受講者操作器の指令に従った前記ロボットの動作に対する評価の入力を受け付け、前記評価を含む前記実技教育の評価の情報を前記制御装置に送信するように構成される
請求項1から13のいずれか一項に記載の教育システム。 The control device is configured to store certification data used for certifying completion of the education, certify completion of the education using the certification data, and transmit a certification result to the trainee operation device;
The control device transmits image data for a test of the academic education included in the certification data to the student operation device, determines an evaluation of the academic education based on the answers to the test received from the student operation device and the correct answers included in the certification data, and certifies the completion of the education using standards included in the certification data, information on the evaluation of the academic education, and information on the evaluation of the practical training received from the instructor operation device;
the student operator has an operator display capable of outputting and displaying an image, and is configured to display the image data for the test on the operator display of the student operator, to accept input of an answer into the student operator, and to transmit the accepted answer to the control device;
The education system according to any one of claims 1 to 13, wherein the instructor operation device is configured to accept an input of an evaluation of the robot's movements in accordance with the instructions of the student operation device, and to transmit evaluation information of the practical training including the evaluation to the controldevice .
請求項1から14のいずれか一項に記載の教育システム。 The education system according to claim1 , wherein the instructor operation device and the student operation device are operation devices for teaching the robot how to perform a certain action.
前記受講者操作器は、パーソナルコンピュータ又はスマートデバイスである
請求項1から14のいずれか一項に記載の教育システム。 the instructor operation device is an operation device for teaching a motion to the robot,
The education system according to claim1 , wherein the student operating device is a personal computer or a smart device.
ロボットと前記ロボットの動作を制御可能である制御装置とが配置される講師エリアに配置される講師操作器によって、前記講師エリアの講師の入力を受け付け、前記講師の入力に従った指令を、前記制御装置に出力することと、receiving an input from a lecturer in the lecturer area by a lecturer operating device disposed in the lecturer area in which a robot and a control device capable of controlling an operation of the robot are disposed, and outputting a command according to the lecturer's input to the control device;
受講者エリアに配置され且つ通信ネットワークを介して前記制御装置及び前記講師操作器とデータ通信可能に接続される受講者操作器によって、前記受講者エリアの受講者の入力を受け付け、前記受講者の入力に従った指令を出力することと、receiving input from a student in the student area by a student operation device that is arranged in the student area and is connected to the control device and the lecturer operation device via a communication network so as to be capable of data communication; and outputting a command in accordance with the input from the student.
前記講師操作器によって、前記受講者操作器から前記制御装置への指令の入力許可の指令を、前記制御装置と前記受講者操作器とに送信することと、transmitting, by the lecturer's operation device, a command for permitting input of a command from the lecturer's operation device to the control device, to the control device and the lecturer's operation device;
前記制御装置によって、前記入力許可を受けている状態の前記受講者操作器から受け取る指令に従って、前記ロボットに動作させることと、causing the robot to operate according to a command received from the trainee operation device in the input permission state by the control device;
前記講師操作器によって、前記講師操作器に含まれる緊急停止入力部へ入力を受けると緊急停止指令を前記制御装置又は前記制御装置が備えるロボットコントローラに出力することと、When an input is received from an emergency stop input unit included in the instructor operation device, an emergency stop command is output to the control device or a robot controller included in the control device.
前記制御装置によって、前記緊急停止指令を受けた場合に前記受講者操作器による前記ロボットの操作を禁止することと、prohibiting the student operator from operating the robot when the control device receives the emergency stop command;
前記制御装置によって、前記講師操作器に含まれ且つ前記講師による入力が可能である複数の講師入力要素のうちの、入力を受けている前記講師入力要素の情報を前記受講者操作器に送信することと、transmitting, by the control device, information on the instructor input element that is being input, among a plurality of instructor input elements that are included in the instructor operation device and that can be input by the instructor, to the student operation device;
前記制御装置によって、前記受講者操作器に含まれ且つ前記受講者による入力が可能であり且つ前記複数の講師入力要素に対応する複数の受講者入力要素のうちの、入力を受けている前記受講者入力要素の情報を前記講師操作器に送信することと、transmitting, by the control device, information on the student input element that is being input, among a plurality of student input elements that are included in the student operation device, that can be input by the student, and that correspond to the plurality of instructor input elements, to the instructor operation device;
前記受講者操作器によって、前記受講者操作器に含まれ且つ前記複数の受講者入力要素のそれぞれを個別に強調表示する受講者強調装置に、入力を受けている前記講師入力要素に対応する前記受講者入力要素を強調表示させることと、a student highlighting device that is included in the student operating device and that individually highlights each of the plurality of student input elements, highlighting the student input element that corresponds to the lecturer input element being input by the student operating device;
前記講師操作器によって、前記講師操作器に含まれ且つ前記複数の講師入力要素のそれぞれを個別に強調表示する講師強調装置に、入力を受けている前記受講者入力要素に対応する前記講師入力要素を強調表示させることと、を含む、教育方法。and causing a lecturer highlighting device, which is included in the lecturer operator and which individually highlights each of the plurality of lecturer input elements, to highlight the lecturer input element corresponding to the student input element being input by the lecturer operator.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020175619AJP7613879B2 (en) | 2020-10-19 | 2020-10-19 | Educational system and method |
| JP2024231072AJP2025039600A (en) | 2020-10-19 | 2024-12-26 | Educational system and methods |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2020175619AJP7613879B2 (en) | 2020-10-19 | 2020-10-19 | Educational system and method |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024231072ADivisionJP2025039600A (en) | 2020-10-19 | 2024-12-26 | Educational system and methods |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2022066982A JP2022066982A (en) | 2022-05-02 |
| JP2022066982A5 JP2022066982A5 (en) | 2023-10-18 |
| JP7613879B2true JP7613879B2 (en) | 2025-01-15 |
Family
ID=81389821
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020175619AActiveJP7613879B2 (en) | 2020-10-19 | 2020-10-19 | Educational system and method |
| JP2024231072APendingJP2025039600A (en) | 2020-10-19 | 2024-12-26 | Educational system and methods |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2024231072APendingJP2025039600A (en) | 2020-10-19 | 2024-12-26 | Educational system and methods |
Country Status (1)
| Country | Link |
|---|---|
| JP (2) | JP7613879B2 (en) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2025067426A (en)* | 2023-10-13 | 2025-04-24 | コベルコ建機株式会社 | system |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130331859A1 (en) | 1998-11-20 | 2013-12-12 | Intuitive Surgical Operations, Inc. | Multi-user medical robotic system for collaboration or training in minimally invasive surgical procedures |
| WO2015016108A1 (en) | 2013-07-29 | 2015-02-05 | 株式会社ダイヘン | Robot control device |
- 2020
- 2020-10-19JPJP2020175619Apatent/JP7613879B2/enactiveActive
- 2024
- 2024-12-26JPJP2024231072Apatent/JP2025039600A/enactivePending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130331859A1 (en) | 1998-11-20 | 2013-12-12 | Intuitive Surgical Operations, Inc. | Multi-user medical robotic system for collaboration or training in minimally invasive surgical procedures |
| WO2015016108A1 (en) | 2013-07-29 | 2015-02-05 | 株式会社ダイヘン | Robot control device |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2025039600A (en) | 2025-03-21 |
| JP2022066982A (en) | 2022-05-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10798339B2 (en) | Telepresence management | |
| JP2025039600A (en) | Educational system and methods | |
| JP6730363B2 (en) | Operation training system | |
| JP2022081591A (en) | Remote control of robot platform based on multi-modal sensory data | |
| US9381426B1 (en) | Semi-automated digital puppetry control | |
| Hu et al. | Stereopilot: A wearable target location system for blind and visually impaired using spatial audio rendering | |
| Chu et al. | Ergonomic workplace design based on real-time integration between virtual and augmented realities | |
| JP7401184B2 (en) | robot system | |
| US20220331967A1 (en) | Management server, remote operation system, remote operation method, and storage medium | |
| Chu et al. | Experimental analysis of augmented reality interfaces for robot programming by demonstration in manufacturing | |
| KR20190095849A (en) | Real time and multi local cross remote control system and method using Mixed Reality Device | |
| CN112543961A (en) | Training processing device, mediation device, training system, and training processing method | |
| Okundaye et al. | Telepresence robotics for hands-on distance instruction | |
| Kaden et al. | A Research Platform for Human-Robot-Interaction with Focus on Collaborative Assembly Scenarios | |
| JP2022066982A5 (en) | ||
| Bennie et al. | Alternative interfaces for human-initiated natural language communication and robot-initiated haptic feedback: towards better situational awareness in human-robot collaboration | |
| Nitsch | Haptic human-machine interaction in teleoperation systems and its implications for the design and effective use of haptic interfaces | |
| RU2020100190A (en) | SOFTWARE AND HARDWARE OF THE TRAINING SYSTEM WITH AUTOMATIC EVALUATION OF THE STUDENT'S EMOTIONS | |
| US20250252385A1 (en) | Systems and methods for using artificial intelligence and machine learning to generate optimized operating parameters for a work tool based on track haptic feedback and quality of job performed | |
| US20250276398A1 (en) | Systems and methods for using virtual reality to simulate a work task using a vocational mask and bidirectional communication between at least two users | |
| JP7145553B1 (en) | Remote instruction management device and remote instruction system | |
| US20250191485A1 (en) | Systems and methods for using a vocational mask with a hyper-enabled worker | |
| JP2025044202A (en) | system | |
| EP4567770A1 (en) | Systems and methods for using a vocational mask with a hyper-enabled worker | |
| US20250229417A1 (en) | Devices, systems, and methods for transferring physical skills to robots |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20231006 | |
| A621 | Written request for application examination | Free format text:JAPANESE INTERMEDIATE CODE: A621 Effective date:20231006 | |
| A977 | Report on retrieval | Free format text:JAPANESE INTERMEDIATE CODE: A971007 Effective date:20240726 | |
| A131 | Notification of reasons for refusal | Free format text:JAPANESE INTERMEDIATE CODE: A131 Effective date:20240730 | |
| A521 | Request for written amendment filed | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20240903 | |
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 Effective date:20241203 | |
| A61 | First payment of annual fees (during grant procedure) | Free format text:JAPANESE INTERMEDIATE CODE: A61 Effective date:20241226 | |
| R150 | Certificate of patent or registration of utility model | Ref document number:7613879 Country of ref document:JP Free format text:JAPANESE INTERMEDIATE CODE: R150 |