JP7608909B2 - Movable device, deflection device, object recognition device, image projection device, and moving body - Google Patents
Movable device, deflection device, object recognition device, image projection device, and moving bodyDownload PDFInfo
- Publication number
- JP7608909B2 JP7608909B2JP2021047767AJP2021047767AJP7608909B2JP 7608909 B2JP7608909 B2JP 7608909B2JP 2021047767 AJP2021047767 AJP 2021047767AJP 2021047767 AJP2021047767 AJP 2021047767AJP 7608909 B2JP7608909 B2JP 7608909B2
- Authority
- JP
- Japan
- Prior art keywords
- movable
- axis
- movable device
- reflecting
- scanning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



















Landscapes
- Mechanical Optical Scanning Systems (AREA)
- Mechanical Light Control Or Optical Switches (AREA)
- Micromachines (AREA)
- Optical Radar Systems And Details Thereof (AREA)
Description
Translated fromJapanese本発明は、可動装置、偏向装置、物体認識装置、画像投影装置、及び移動体に関する。The present invention relates to a movable device, a deflection device, an object recognition device, an image projection device, and a moving body.
近年、半導体製造技術を応用したマイクロマシニング技術の発達に伴い、シリコン又はガラスを微細加工して製造されるMEMS(Micro Electro Mechanical Systems)デバイスの開発が進んでいる。In recent years, with the advancement of micromachining technology that applies semiconductor manufacturing technology, there has been progress in the development of MEMS (Micro Electro Mechanical Systems) devices that are manufactured by microfabricating silicon or glass.
MEMSデバイスとしては、例えば、反射部を有する可動部と、可動部に接続し、可動部を駆動させる第1駆動部と、第1駆動部に接続し、第1駆動部を支持する第1支持部と、を有する可動装置が知られている。この可動装置では、可動部は、反射部を挟んで対称に配置された調整部を含む(例えば、特許文献1参照)。As an example of a MEMS device, a movable device is known that has a movable part having a reflecting part, a first driving part connected to the movable part and driving the movable part, and a first support part connected to the first driving part and supporting the first driving part. In this movable device, the movable part includes adjustment parts that are arranged symmetrically on either side of the reflecting part (see, for example, Patent Document 1).
この可動装置において、調整部は、可動部の重量の対称性を確保する部分であり、調整部を設けて可動部の重量の対称性を確保することで、可動部の重心位置のずれを防止し、可動部の回動の安定性を確保している。In this movable device, the adjustment unit is a part that ensures the symmetry of the weight of the movable part. By providing the adjustment unit and ensuring the symmetry of the weight of the movable part, the center of gravity of the movable part is prevented from shifting, and the stability of the rotation of the movable part is ensured.
ところで、上記の可動装置において、反射部は、重力の影響を受けて、Z方向(重力方向)の位置及び設置方向が変わる。これにより、反射部の走査角及び走査中心が変化する。反射部の走査角及び走査中心が変化すると、例えば、可動装置を物体との距離を測定するセンシング技術等に応用する場合に、測定結果の精度を悪化させる要因になりえる。しかし、上記の可動装置では、重力の影響による反射部の走査角の変化及び走査中心の変化に改善の余地があった。In the above-mentioned movable device, the reflecting part is affected by gravity and changes its position and installation direction in the Z direction (gravity direction). This causes the scanning angle and scanning center of the reflecting part to change. If the scanning angle and scanning center of the reflecting part change, for example, when the movable device is applied to sensing technology that measures the distance to an object, this can cause the accuracy of the measurement results to deteriorate. However, in the above-mentioned movable device, there was room for improvement in the change in the scanning angle and scanning center of the reflecting part due to the effect of gravity.
本発明は、上記の点に鑑みてなされたものであって、重力の影響による反射部の走査角の変化及び走査中心の変化を抑制可能な可動装置を提供することを課題とする。The present invention has been made in consideration of the above points, and aims to provide a movable device that can suppress changes in the scanning angle of the reflecting part and changes in the scanning center caused by the influence of gravity.
開示の技術の一態様に係る可動装置は、所定の軸を中心に回動可能な可動部と、前記可動部に一端が接続され、前記可動部を回動させる駆動部と、を備え、前記可動部は、前記所定の軸が伸びる方向に延出する延出部を有し、平面視で、前記可動部は、前記延出部の長手方向の端部に、前記駆動部とは反対側に突出する突出部を有する。
A movable device according to one aspect of the disclosed technology comprises a movable part that can rotate around a predetermined axis, and a drive part having one end connected to the movable part and rotating the movable part, wherein the movable parthas an extension part that extends in the direction in which the predetermined axis extends, and in a planar view, the movable part has a protrusion at a longitudinal end of the extension part that protrudes on the opposite side to the drive part .
開示の技術によれば、重力の影響による反射部の走査角の変化及び走査中心の変化を抑制可能な可動装置を提供できる。The disclosed technology can provide a movable device that can suppress changes in the scanning angle of the reflecting part and changes in the scanning center caused by the effects of gravity.
以下、図面を参照して発明を実施するための形態について説明する。各図面において、同一構成部分には同一符号を付し、重複した説明を省略する場合がある。Below, a description will be given of a mode for carrying out the invention with reference to the drawings. In each drawing, the same components are given the same reference numerals, and duplicated explanations may be omitted.
なお、以下の実施形態の説明では、実施形態の用語における回動、揺動、可動は同義であるとする。さらに、矢印により示した方向のうち、X方向は回転軸となる第1軸と平行な方向、Y方向は第1軸と垂直な方向、Z方向はXY平面と直交する方向とする。In the following description of the embodiment, the terms rotation, swing, and movement are synonymous. Furthermore, among the directions indicated by the arrows, the X direction is parallel to the first axis that is the axis of rotation, the Y direction is perpendicular to the first axis, and the Z direction is perpendicular to the XY plane.
〈第1実施形態〉
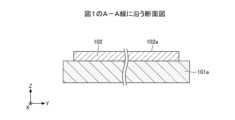
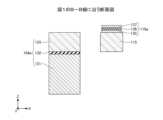
図1は、第1実施形態に係る可動装置である光偏向器の平面図(反射面側から視た図)である。図2は、第1実施形態に係る可動装置である光偏向器の底面図(反射面とは反対側から視た図)である。図3は、図1のA-A線に沿う断面図である。図4は、図1のB-B線に沿う断面図である。 First Embodiment
Fig. 1 is a plan view (viewed from the reflecting surface side) of an optical deflector which is a movable device according to the first embodiment. Fig. 2 is a bottom view (viewed from the opposite side to the reflecting surface) of the optical deflector which is a movable device according to the first embodiment. Fig. 3 is a cross-sectional view taken along line A-A in Fig. 1. Fig. 4 is a cross-sectional view taken along line B-B in Fig. 1.
図1~図4を参照すると、可動装置100は、両端支持構造の光偏向器である。可動装置100は、主に、可動部101と、反射部102と、駆動部103a及び103bと、支持部104a及び104bとを有している。可動装置100は、反射部102を含む可動部101をX軸に平行な第1軸AX1を中心に回動可能にする構造を備えている。すなわち、可動装置100は、反射部102を含む可動部101が1軸方向(第1軸AX1の周り)に回動することにより、入射する光を1軸方向に走査しながら偏向可能である。以下、可動装置100の構造について詳説する。Referring to Figures 1 to 4, the
可動部101は、中央部101aと、延出部101b及び101cとを有する。中央部101aは、例えば、X方向の長さよりもY方向の長さが長い矩形状であり、第1軸AX1を跨ぐように配置されている。The
延出部101bは、中央部101aの+Y側端部(第1軸AX1に直交する方向の一端部)の両側から第1軸AX1が伸びる方向に延出している。延出部101cは、中央部101aの-Y側端部(第1軸AX1に直交する方向の他端部)の両側から第1軸AX1が伸びる方向に延出している。延出部101b及び101cは、例えば、Y方向の長さよりもX方向の長さが長い矩形状である。図1の例では、延出部101b及び101cは一定幅である。しかし、これには限らず、延出部101b及び101cは部分的に幅が異なっていてもよい。The
ここで、『第1軸AX1が伸びる方向に延出する』とは、対象物が第1軸AX1と直交する方向以外の方向に伸びていることである。すなわち、延出部101b及び101cは、第1軸AX1と直交する方向以外の方向に伸びていればよく、第1軸AX1に対して傾斜していてもよい。ただし、可動装置100の大型化を抑制する観点から、図1に示すように、延出部101b及び101cは、長手方向が第1軸AX1と平行であることが好ましい。Here, "extending in the direction in which the first axis AX1 extends" means that the object extends in a direction other than the direction perpendicular to the first axis AX1. In other words, the
なお、本願において、『平行』とは、2つの直線や辺等が0°±5°の範囲にある場合を含むものとする。また、『垂直』又は『直交』とは、2つの直線や辺等が90°±5°の範囲にある場合を含むものとする。ただし、個別に特別な説明がある場合は、この限りではない。また、『中心』や『中央』は、対象物のおおよその中心や中央を示すものであり、厳密な中心や中央を示すものではない。すなわち、製造誤差程度のばらつきは、許容されるものとする。点対称や線対称等についても同様である。In this application, "parallel" includes cases where two lines or sides are within the range of 0°±5°. Furthermore, "perpendicular" or "orthogonal" includes cases where two lines or sides are within the range of 90°±5°. However, this does not apply unless there is a special explanation for each case. Furthermore, "center" and "middle" refer to the approximate center or middle of an object, and do not refer to the exact center or middle. In other words, variations on the scale of manufacturing errors are permitted. The same applies to point symmetry and line symmetry.
反射部102は、可動部101上に形成されている。具体的には、反射部102は、中央部101aの+Z側の面の大部分に設けられている。反射部102は、延出部101b及び101cの一部又は全部に形成されてもよい。反射部102は、図1の例では矩形状であるが、円形状、楕円形状、又は他の複雑な形状であってもよい。反射部102は、例えば、アルミニウム、金、若しくは銀等を含む金属薄膜、又はその多層膜で構成される。反射面102aは、反射部102の+Z側の面である。The
駆動部103a及び103bは、可動部101に一端が直接又は間接に接続され、可動部101を回動させる。すなわち、駆動部103a及び103bは、反射部102を含む可動部101を回動可能な状態で支持する1対のアクチュエータである。駆動部103a及び103bは、振動梁となる複数の梁部115と、隣接する梁部115同士を接続する接続部116とを有している。駆動部103a及び103bにおいて、隣接する梁部115同士は、+Y側及び-Y側が接続部116により交互に接続されてミアンダ構造を形成している。なお、接続部116は、隣接する梁部115の長手方向の端部同士を接続せずに、隣接する梁部115の長手方向の端部よりも手前の部分同士を接続してもよい。The driving
駆動部103aの+X側かつ-Y側端部は、可動部接続部117aを介し可動部101の中央部101aに接続されている。また、駆動部103aの-X側かつ-Y側端部は、支持部接続部118aを介して支持部104aに接続されている。また、駆動部103bの-X側かつ+Y側端部は、可動部接続部117bを介し可動部101の中央部101aに接続されている。また、駆動部103bの+X側かつ+Y側端部は、支持部接続部118bを介して支持部104bに接続されている。なお、図1の例では、支持部104a及び104bは、可動部101のX方向両側に配置されている。支持部104aは駆動部103aを支持し、支持部104bは駆動部103bを支持する。The +X and -Y end of the
中央部101aの-X側に位置する梁部115の+Z側の面の上には、梁部115ごとに、交互に駆動素子郡119aと駆動素子郡119bが設けられている。同様に、中央部101aの+X側に位置する梁部115の+Z側の面の上には、梁部115ごとに、交互に駆動素子郡119aと駆動素子郡119bが設けられている。駆動素子郡119a及び119bは、例えば、圧電素子である。On the +Z side surface of the
可動装置100は、例えば、可動部101の中心に対して点対称に形成することができる。しかし、これには限らず、可動装置100は、例えば、第1軸AX1に垂直で可動部101の中心を通る直線に対して線対称に形成してもよい。The
可動装置100は、例えば、1枚のSOI(Silicon On Insulator)基板をエッチング処理等により成形し、成形した基板上に反射部102並びに駆動素子郡119a及び119b等を形成することで、各構成部が一体的に形成されている。SOI基板は、単結晶シリコン(Si)からなるシリコン支持層の上に酸化シリコン層が設けられ、酸化シリコン層の上に更に単結晶シリコンからなるシリコン活性層が設けられた基板である。The
シリコン活性層は、X方向又はY方向に対してZ方向への厚みが小さいため、シリコン活性層のみで構成された部材は、弾性を有する弾性部としての機能を備える。シリコン活性層の厚みは、例えば、20~60μm程度である。なお、SOI基板は、必ず平面状である必要はなく、曲率等を有していてもよい。Since the silicon active layer has a smaller thickness in the Z direction than in the X or Y direction, a member consisting of only the silicon active layer functions as an elastic part. The thickness of the silicon active layer is, for example, about 20 to 60 μm. Note that the SOI substrate does not necessarily have to be flat, and may have a curvature, etc.
可動部101の中央部101aは、例えば、シリコン活性層により形成されており、シリコン活性層の+Z側の面に反射部102が形成されている。可動部101の延出部101b及び101cも、中央部101aと同様に、例えば、シリコン活性層により形成されている。The
図4に示すように、支持部104aは、例えば、順次積層されたシリコン支持層131、酸化シリコン層132、及びシリコン活性層133により形成されている。支持部104bについても同様である。梁部115は、例えば、シリコン活性層により形成されている。As shown in FIG. 4, the
駆動素子郡119a及び119bの各々は圧電素子であり、例えば、梁部115の+Z側の面上に順次形成された下部電極135、圧電部136、及び上部電極137を有している。下部電極135及び上部電極137は、例えば、金(Au)又は白金(Pt)等を用いてスパッタリング法等により形成できる。圧電部136は、例えば、圧電材料であるPZT(チタン酸ジルコン酸鉛)から形成できるが、その他の圧電材料であってもよく、種類は問わない。圧電部136の厚さは、例えば、2μm程度である。Each of the driving
駆動素子郡119a及び119bの下部電極135と上部電極137との間に電圧信号を印加すると、反射部102を含む可動部101は、第1軸AX1の周りに回動する。具体的には、駆動素子郡119a及び119bにおいて、支持部104a及び104b側からそれぞれ奇数番目の梁部115と偶数番目の梁部115をセットで交互に逆相で駆動する。When a voltage signal is applied between the
例えば、下部電極135と上部電極137との間にパルス波又は正弦波の電圧信号を印加すると、駆動素子郡119a及び119bは、その電歪特性によって梁部115の表面の面内方向において伸縮を繰り返す。これにより、梁部115が曲げ振動してミアンダ構造が交互に上下運動し、さらにミアンダ構造の上下運動が回転振動(捻り振動)に変換され、反射部102を含む可動部101が第1軸AX1の周りに回動する。For example, when a pulse wave or sine wave voltage signal is applied between the
なお、図1においては、駆動素子郡119a及び119bは、梁部115の一部に設けられている。しかし、駆動素子郡119a及び119bは、必ずしも梁部115の一部に設けられている必要はなく、梁部115の全面に設けられてもよい。また、駆動素子郡119a及び119bは、全ての梁部115に設けられている必要はなく、複数の梁部115のうち、一部のみに設けられてもよい。In FIG. 1, the driving
また、上部電極137の+Z側の面上、並びに支持部104a及び104bの+Z側の面上の少なくともいずれかに酸化シリコン層等からなる絶縁層が形成されていてもよい。このとき、絶縁層の上に電極配線を設け、また、下部電極135又は上部電極137と電極配線とが接続される接続スポットのみ、開口部として部分的に絶縁層を除去又は絶縁層を形成しないことが好ましい。これにより、駆動部103a及び103b並びに電極配線の設計自由度を向上し、更に電極同士の接触による短絡を抑制できる。また、酸化シリコン層は、反射防止材としての機能を備えてもよい。An insulating layer made of a silicon oxide layer or the like may be formed on at least one of the +Z side surface of the
また、駆動素子郡119a及び119bは、圧電部が複数積層され、中間電極を含む構造のものであってもよい。In addition, the driving
なお、以上は、可動装置100をSOI基板から形成する例を示したが、これには限らない。可動装置100は、エッチング処理等により一体的に成形でき、部分的に弾性を持たせることができる基板であれば、SOI基板以外から形成してもよい。このような基板としては、例えば、Si基板及びAl基板等が挙げられる。The above describes an example in which the
このように、可動装置100において、可動部101は、第1軸AX1の方向に延出する延出部101b及び101cを有する。これにより、重力の影響による反射部102の走査角の変化及び走査中心の変化(-Z方向への変位)を抑制可能である。その結果、可動装置100では、高精度の光走査が可能となる。これに関して、以下に詳しく説明する。In this way, in the
重力の影響による反射部102の走査角の変化及び走査中心の変化は、反射部102が重力の影響を受けて-Z方向(重力方向)に変位することが一因である。反射部102の重力の影響による-Z方向の変位は、反射部102を含む可動部101の(質量)/(ばね定数)に比例する。一方、可動部101の共振周波数の変化は、反射部102を含む可動部101の(第1軸AX1の周りのねじりばね定数)/(第1軸AX1の周りの慣性モーメント)の平方根に比例する。The change in the scanning angle and the scanning center of the reflecting
ここで、ばね定数と第1軸AX1の周りのねじりバネ定数は、おおよそ比例関係にある。よって、重力の影響による反射部102の走査角の変化及び走査中心の変化は、(質量)/(第1軸AX1の周りの慣性モーメント)に比例することになる。そのため、重力の影響による反射部102の走査角の変化及び走査中心の変化を抑制するには、(質量)/(第1軸AX1の周りの慣性モーメント)を小さくすればよい。Here, the spring constant and the torsion spring constant around the first axis AX1 are roughly proportional to each other. Therefore, the change in the scanning angle and the change in the scanning center of the reflecting
一般に、可動部101において、第1軸AX1から遠い箇所の質量が大きいほど、可動部101の第1軸AX1の周りの慣性モーメントは増加する。よって、可動部101において、第1軸AX1から離れた領域に質量を集中させると、(質量)/(第1軸AX1の周りの慣性モーメント)を小さくでき、重力の影響による反射部102の走査角の変化及び走査中心の変化を効果的に抑制できる。In general, the greater the mass of the
すなわち、可動装置100において、可動部101が第1軸AX1の方向に延出する延出部101b及び101cを有することで、可動部101の第1軸AX1の周りの慣性モーメントは増加する。その結果、可動部101において、(質量)/(第1軸AX1の周りの慣性モーメント)を小さくでき、重力の影響による反射部102の走査角の変化及び走査中心の変化を抑制できる。可動部101は、第1軸AX1に対して、平面形状及び質量が対称であることが好ましい。これにより、可動部101の第1軸AX1の周りの慣性モーメントをより効率的に増加させることができる。In other words, in the
なお、可動部101の共振周波数は、(第1軸AX1の周りのねじりばね定数)/(第1軸AX1の周りの慣性モーメント)の平方根に比例するため、可動部101の第1軸AX1の周りの慣性モーメントが増加すると、可動部101の共振周波数は低下する。可動部101の共振周波数を維持するためには、可動部101のばね定数を増加させる必要があるが、可動部101のばね定数を増加させることで、重力の影響による反射部102の走査角の変化及び走査中心の変化をさらに抑制可能となる。The resonant frequency of the
可動部において第1軸AX1に直交する方向の長さを増加させても上記と同様の効果が得られるが、可動装置のサイズが大きくなり、かつコストも増加するため好ましくない。本実施形態に係る可動装置100では、可動部101の延出部101b及び101cは第1軸AX1が伸びる方向に延出しており、第1軸AX1に直交する方向には延出していない。これにより、可動装置100のサイズが大きくなることが抑制しつつ、可動部101の第1軸AX1の周りの慣性モーメントを増加できるため、可動装置100の大型化抑制の点及びコストの点でも有利である。Increasing the length of the movable part in the direction perpendicular to the first axis AX1 can achieve the same effect as above, but this is not preferred as it increases the size of the movable device and the cost. In the
なお、図1において、延出部101bの-X側端部は、支持部104aの+Y側端部の最も+X側の位置よりも更に+X方向に位置していることが好ましい。また、延出部101bの+X側端部は、支持部104bの+Y側端部の最も-X側の位置よりも更に-X方向に位置していることが好ましい。また、延出部101cの-X側端部は、支持部104aの-Y側端部の最も+X側の位置よりも更に+X方向に位置していることが好ましい。また、延出部101cの+X側端部は、支持部104bの-Y側端部の最も-X側の位置よりも更に-X方向に位置していることが好ましい。In FIG. 1, the -X side end of the
言い換えれば、延出部101bのX方向の長さは、互いに対向する支持部104a及び104bに挟まれた領域のX方向の長さよりも短い方が好ましい。また、延出部101cのX方向の長さは、互いに対向する支持部104a及び104bに挟まれた領域のX方向の長さよりも短い方が好ましい。これらの要件を満たすことで、可動部101が回動したときに延出部101b及び101cが支持部104a及び104bに接触するおそれを低減できる。In other words, it is preferable that the length in the X direction of the
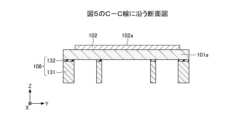
図5は、第1実施形態に係る可動装置である光偏向器の部分底面図(反射面とは反対側から視た図)である。図6は、図5のC-C線に沿う断面図である。Figure 5 is a partial bottom view (viewed from the side opposite the reflecting surface) of the optical deflector, which is a movable device according to the first embodiment. Figure 6 is a cross-sectional view taken along line CC in Figure 5.
図5及び図6に示すように、可動部101は、厚さ方向の一方側に突起する突起部108(リブ構造)を有してもよい。具体的には、可動部101は、裏面側(-Z側の面)に突起部108を有してもよい。突起部108は、例えば、順次積層されたシリコン支持層131及び酸化シリコン層132により構成される。酸化シリコン層132上には、シリコン活性層から形成された可動部101が位置している。As shown in Figures 5 and 6, the
突起部108は、例えば、中央部101aの+Y側端部及び延出部101bの裏面側、並びに中央部101aの-Y側端部及び延出部101cの裏面側に設けることができる。突起部108は、中央部101aのその他の領域、すなわち平面視で反射部102と主に重複する領域の裏面側に設けてもよい。突起部108は、延出部101b及び延出部101cの裏面側のみに設けてもよい。突起部108は、第1軸AX1に対して対称となるように設けることが好ましい。The
なお、平面視とは、可動部101が回動していないときに、可動部101の+Z側の面の法線方向から視ることである。また、可動部101が回動していないときに、可動部101の+Z側の面の法線方向から視た形状を平面形状と称する場合がある。Note that a planar view refers to a view from the normal direction of the +Z side surface of the
このように、可動部101の裏面側に突起部108を設けることで、可動部101の第1軸AX1の周りの慣性モーメントを図1~図4の場合よりも増加させることができる。その結果、可動部101において、(質量)/(第1軸AX1の周りの慣性モーメント)を図1~図4の場合よりもさらに小さくでき、重力の影響による反射部102の走査角の変化及び走査中心の変化を図1~図4の場合よりもさらに抑制できる。In this way, by providing the
なお、可動部101の第1軸AX1の周りの慣性モーメントを効果的に増加させるためには、優先的には、第1軸AX1から離れた領域から突起部108を設けることが好ましい。しかし、図5のように、反射部102の裏面側にも突起部108を設けることは、回動中の反射部102の変形を低減できる点で好適である。また、慣性モーメントには、第1軸AX1上以外の質量が影響するため、反射部102の裏面側に突起部108を設けることも、慣性モーメントの向上に一定の効果を有する。In order to effectively increase the moment of inertia around the first axis AX1 of the
図7は、第1実施形態の変形例1に係る可動装置である光偏向器の平面図(反射面側から視た図)である。図7に示す可動装置100Aのように、平面視で、可動部101は、延出部101bの長手方向の端部である-X側端部及び+X側端部に、駆動部103a及び103bとは反対側に突出する突出部101dを有してもよい。また、平面視で、可動部101は、延出部101cの長手方向の端部である-X側端部及び+X側端部に、駆動部103a及び103bとは反対側に突出する突出部101eを設けてもよい。Figure 7 is a plan view (viewed from the reflecting surface side) of an optical deflector, which is a movable device according to Modification 1 of the first embodiment. As in the
突出部101d及び101eを設けることにより、第1軸AX1から離れた領域の質量を効果的に増やせるため、可動部101の第1軸AX1の周りの慣性モーメントを図1~図4の場合よりも増加させることができる。その結果、可動部101において、(質量)/(第1軸AX1の周りの慣性モーメント)を図1~図4の場合よりもさらに小さくでき、重力の影響による反射部102の走査角の変化及び走査中心の変化を図1~図4の場合よりもさらに抑制できる。可動装置100Aにおいて、図5及び図6に示す突起部108をさらに設けてもよい。By providing
図8は、第1実施形態の変形例2に係る可動装置である光偏向器の平面図(反射面側から視た図)である。図8に示す可動装置100Bのように、平面視で、可動部101は、延出部101bの長手方向の端部である-X側端部及び+X側端部に、駆動部103a及び103bの側に突出する突出部101fを設けてもよい。また、平面視で、可動部101は、延出部101cの長手方向の端部である-X側端部及び+X側端部に、駆動部103a及び103bの側に突出する突出部101gを設けてもよい。Figure 8 is a plan view (viewed from the reflecting surface side) of an optical deflector, which is a movable device according to Modification 2 of the first embodiment. As in the
突出部101f及び101gを設けることにより、第1軸AX1から離れた領域の質量を効果的に増やせるため、可動部101の第1軸AX1の周りの慣性モーメントを図1~図4の場合よりも増加させることができる。その結果、可動部101において、(質量)/(第1軸AX1の周りの慣性モーメント)を図1~図4の場合よりもさらに小さくでき、重力の影響による反射部102の走査角の変化及び走査中心の変化を図1~図4の場合よりもさらに抑制できる。By providing
なお、可動装置100Aと可動装置100Bを比較すると、突出部が支持部と接触するおそれが低い点では可動装置100Aが好ましく、全体のサイズを小さくできる点では可動装置100Bが好ましい。Comparing
なお、可動装置100Bにおいて、図5及び図6に示す突起部108をさらに設けてもよい。また、可動装置100Bにおいて、可動装置100Aの構造を追加で採用してもよい。すなわち、可動装置100Bにおいて、突出部101f及び101gに加え、平面視で、駆動部103a及び103bとは反対側に突出する突出部101d及び101eを設けてもよい。Note that the
図9は、第1実施形態の変形例3に係る可動装置である光偏向器の平面図(反射面側から視た図)である。図9に示す可動装置100Cのように、中央部101a、並びに延出部101b及び101cの+Z側に面の全面に反射部102を設けてもよい。これにより、可動部101において、第1軸AX1から離れた領域の質量を増やせるため、可動部101の第1軸AX1の周りの慣性モーメントを図1~図4の場合よりも増加させることができる。Figure 9 is a plan view (viewed from the reflective surface side) of an optical deflector, which is a movable device according to Variation 3 of the first embodiment. As in the
その結果、可動部101において、(質量)/(第1軸AX1の周りの慣性モーメント)を図1~図4の場合よりもさらに小さくでき、重力の影響による反射部102の走査角の変化及び走査中心の変化を図1~図4の場合よりもさらに抑制できる。可動装置100Cにおいて、図5及び図6に示す突起部108をさらに設けてもよい。また、可動装置100Cにおいて、図7又は図8に示す突出部をさらに設けてもよい。As a result, in the
なお、反射部102は、必ずしも中央部101a、並びに延出部101b及び101cの+Z側に面の全面に設けなくてもよいが、できるだけ面積を増やした方が可動部101の第1軸AX1の周りの慣性モーメントを大きくできる点で有効である。また、反射部102を中央部101a、並びに延出部101b及び101cの+Z側に面の全面に設けると、可動部101の厚さが均一化するため、不要な振動モードの発生を抑制できる点でも好ましい。The reflecting
なお、光を反射するために必要な領域のみに反射部102を設け、それ以外の領域には、反射部102と異なる材料の層を設けて質量の向上を図ってもよい。この場合も、可動部101の第1軸AX1の周りの慣性モーメントを大きくできる。The reflecting
〈第2実施形態〉
図10は、第2実施形態に係る可動装置である光偏向器の平面図(反射面側から視た図)である。図11は、第2実施形態に係る可動装置である光偏向器の底面図(反射面とは反対側から視た図)である。 Second Embodiment
Fig. 10 is a plan view (viewed from the reflecting surface side) of the optical deflector which is a movable device according to the second embodiment. Fig. 11 is a bottom view (viewed from the opposite side to the reflecting surface) of the optical deflector which is a movable device according to the second embodiment.
図10及び図11を参照すると、可動装置200は、両端支持構造の光偏向器である。可動装置200は、反射部202を含む可動部201をX軸に平行な第1軸AX1の周りに回動可能にする構造を備えている。すなわち、可動装置200は、反射部202を含む可動部201が1軸方向(第1軸AX1の周り)に回動することにより、入射する光を1軸方向に走査しながら偏向可能である。以下、可動装置200の構造について詳説する。Referring to Figures 10 and 11, the
可動装置200は、主に、可動部201と、反射部202と、駆動部203a及び203bと、支持部204と、一対のトーション梁220a及び220bとを有している。可動装置200は、例えば、可動部201の中心に対して点対称に形成することができる。The
可動部201は、中央部201aと、延出部201b及び201cとを有する。中央部201aは、例えば、X方向の長さよりもY方向の長さが長い矩形状である。延出部201bは、中央部201aの+Y側端部の両側から第1軸AX1が伸びる方向に延出している。延出部201cは、中央部201aの-Y側端部の両側から第1軸AX1が伸びる方向に延出している。延出部201b及び201cは、例えば、Y方向の長さよりもX方向の長さが長い矩形状である。The
図10の例では、延出部201b及び201cは第1軸AX1と平行である。しかし、これには限らず、延出部201b及び201cは第1軸AX1に対して傾斜していてもよい。また、図10の例では、延出部201b及び201cは一定幅である。しかし、これには限らず、延出部201b及び201cは部分的に幅が異なっていてもよい。In the example of FIG. 10, the
反射部202は、可動部201上に形成されている。具体的には、反射部202は、中央部201aの+Z側の面の大部分に形成されている。反射部202は、延出部201b及び201cの一部又は全部に形成されてもよい。反射部202は、図10の例では矩形状であるが、円形状、楕円形状、又は他の複雑な形状であってもよい。反射部202は、例えば、アルミニウム、金、若しくは銀等を含む金属薄膜、又はその多層膜で構成される。反射面202aは、反射部202の+Z側の面である。The
駆動部203a及び203bは、反射部202を含む可動部201を回動可能な状態で支持する1対のアクチュエータである。駆動部203a及び203bの各々は、振動梁となる梁部215と、梁部215の上面に形成された駆動素子219a及び219bとを有している。The driving
梁部215は、長手方向をY方向に向けて配置され、両端が支持部204の内側に接続されている。駆動素子219a及び219bは、長手方向をY方向に向けた短冊状に形成されている。駆動素子219a及び219bは、例えば、第1軸AX1に対して線対称となるように配置される。駆動素子219a及び219bは、例えば、圧電素子である。The
支持部204は、例えば、可動部201を囲うように矩形枠状に形成されている。支持部204は、例えば、シリコン支持層、酸化シリコン層、及びシリコン活性層から構成される。なお、支持部204は、可動部201を完全に囲うように形成される必要はなく、例えば、図1における支持部104a及び104bのように分離して配置することも可能である。The
トーション梁220a及び220bは、可動部201の中央部201aの長手方向の略中央部に一端が接続し、第1軸AX1方向にそれぞれ延びている。トーション梁220a及び220bは、反射部202を含む可動部201を第1軸AX1の周りに可動可能に支持する一対の弾性支持部である。トーション梁220a及び220bは、例えば、シリコン活性層から構成される。The
トーション梁220aの他端は、駆動部203aの梁部215の長手方向の略中央部に接続されている。トーション梁220bの他端は、駆動部203bの梁部215の長手方向の略中央部に接続されている。トーション梁220a及び220bの長手方向と梁部215の長手方向は垂直である。トーション梁220aの中心軸は、例えば、第1軸AX1となる。The other end of the
このように、駆動部203a及び203bの各々の梁部215は、トーション梁220aの中心軸である第1軸AX1に対してY方向の両側に配置されている。そして、梁部215は、反射部202を含む可動部201とトーション梁220a及び220bとを、支持部204に対して両側から支持している。In this way, the
可動装置200において、駆動素子219a及び219bは、例えば、駆動素子郡119a及び119bと同一構造である。可動装置200では、例えば、駆動素子219a及び219bの下部電極と上部電極との間にパルス波又は正弦波の電圧信号を印加すると、駆動素子219a及び219bは、その電歪特性によって梁部215の表面の面内方向において伸縮を繰り返す。梁部215の曲げ振動は、トーション梁220a及び220bで回転振動(捻り振動)に変換され、反射部202を含む可動部201が第1軸AX1の周りに回動する。In the
可動装置200は、例えば、可動装置100と同様に、SOI基板、Si基板、又はAl基板等を用いて形成できる。The
なお、反射部202を含む可動部201を第1軸AX1の周りに駆動可能であれば、各構成部の形状は実施形態の形状に限定されない。例えば、トーション梁220a及び220b並びに梁部215が曲率を有した形状を有していてもよい。In addition, as long as the
このように、可動装置200において、可動部201は、第1軸AX1の方向に延出する延出部201b及び201cを有する。これにより、可動装置100の場合と同様に、重力の影響による反射部202の走査角の変化及び走査中心の変化を抑制可能である。可動装置200において、図5~図9と同様の変形を施してもよい。In this way, in the
図12は、第2実施形態の変形例1に係る可動装置である光偏向器の平面図(反射面側から視た図)である。図12に示す可動装置200Aは、反射面を有する可動部を回動させて、反射面へ入射する光を1軸方向(X軸に平行な第1軸AX1の周り)に偏向する片持ち構造の光偏向器である。Figure 12 is a plan view (viewed from the reflecting surface side) of an optical deflector, which is a movable device according to Variation 1 of the second embodiment. The
可動装置200Aは、可動装置200とは異なり片持ち構造であるため、駆動部203c及び203dのように、第1軸AX1の片側のみに駆動部が設けられている。Unlike
可動装置200Aでは、可動装置200と同様に、梁部215の曲げ振動を、トーション梁220a及び220bで回転振動(捻り振動)に変換することで、反射部202を含む可動部201を第1軸AX1の周りに回動することができる。In the
可動装置200Aのような片持ち構造の場合でも、可動部201が第1軸AX1の方向に延出する延出部201b及び201cを有することで、可動装置200の場合と同様に、重力の影響による反射部202の走査角の変化及び走査中心の変化を抑制可能である。可動装置200Aにおいて、図5~図9と同様の変形を施してもよい。Even in the case of a cantilever structure such as the
〈第3実施形態〉
第3実施形態では、第1実施形態及び第2実施形態に係る可動装置を利用した2軸の光偏向器の例を示す。なお、本実施形態では、第1軸AX1を回動の中心とした光走査を副走査とし、第2軸AX2を回動の中心とした光走査を主走査とする。 Third Embodiment
The third embodiment shows an example of a two-axis optical deflector that uses the movable device according to the first and second embodiments. In this embodiment, optical scanning with the first axis AX1 as the center of rotation is defined as sub-scanning, and optical scanning with the second axis AX2 as the center of rotation is defined as main scanning.
図13は、第3実施形態に係る可動装置である光偏向器の平面図(反射面側から視た図)である。Figure 13 is a plan view (viewed from the reflecting surface side) of an optical deflector, which is a movable device according to the third embodiment.
図13を参照すると、可動装置100Dは、両端支持構造の光偏向器である。可動装置100Dは、反射部202を含む可動部201及び可動部101をX軸に平行な第1軸AX1の周りに回動可能にする構造を備えている。また、可動装置100Dは、反射部202を含む可動部201をY軸に平行な第2軸AX2の周りに回動可能にする構造を備えている。すなわち、可動装置100Dは、反射部202を含む可動部201が2軸方向(第1軸AX1及び第2軸AX2の周り)に回動することにより、入射する光を2軸方向に走査しながら偏向可能である。Referring to FIG. 13, the
可動装置100Dは、可動装置100の中央部101aの内側に開口部を有し、開口部内に可動部201等を配置したものである。すなわち、開口部内には、可動装置200の支持部204の内側に相当する構造が配置されている。そして、可動部201は、第1軸AX1と直交する第2軸AX2を中心に回動可能に中央部101aに支持されている。なお、可動装置100Dは、可動装置200とは異なり、可動部201が延出部を有していない。可動装置100Dにおいて、梁部115の長手方向と、トーション梁220a及び220bの長手方向は、いずれもY方向(第2軸AX2の方向)を向いている。The
可動装置100Dにおいて、可動装置100に相当する構造の部分が副走査方向の回動に寄与し、可動装置200に相当する構造の部分が主走査方向(高速軸)の回動に寄与する。すなわち、駆動部103a及び103bは、可動部201を含む可動部101を第1軸AX1回りに揺動させる。また、駆動部203a及び203bは、可動部201を第1軸AX1と直交する第2軸AX2周りに揺動させる。In
このように、可動装置100Dにおいて、可動部101は、第1軸AX1の方向に延出する延出部101b及び101cを有する。これにより、可動装置100の場合と同様に、第1軸AX1の方向の回動に関し、重力の影響による反射部202の走査角の変化及び走査中心の変化を抑制可能である。可動装置100Dにおいて、図5~図9と同様の変形を施してもよい。In this way, in the
図14は、第3実施形態の変形例1に係る可動装置である光偏向器の平面図(反射面側から視た図)である。図14に示す可動装置100Eは、可動部201が第2軸AX2の伸びる方向に延出する延出部201b及び201cを有する点が、可動装置100D(図13参照)と相違する。Figure 14 is a plan view (viewed from the reflecting surface side) of an optical deflector, which is a movable device according to Variation 1 of the third embodiment. The
可動装置100Eのように、可動部101が延出部101b及び101cを有し、さらに可動部201が延出部201b及び201cを有する構造であってもよい。これにより、可動装置100Dの場合と同様に、第1軸AX1の方向の回動に関し、重力の影響による反射部202の走査角の変化及び走査中心の変化を抑制可能である。そして、さらに第2軸AX2の方向の回動に関し、重力の影響による反射部202の走査角の変化及び走査中心の変化を抑制可能である。As in
以上に説明した第1~第3実施形態及び変形例に係る可動装置は、光走査システム、画像投影装置、光書込装置、及び物体認識装置に使用することができる。The movable devices according to the first to third embodiments and the modified examples described above can be used in optical scanning systems, image projection devices, optical writing devices, and object recognition devices.
[光走査システム]
まず、図15~図18を参照して、第1~第3実施形態及び変形例に係る可動装置のいずれかを搭載した光走査システムについて詳細に説明する。 [Optical scanning system]
First, an optical scanning system incorporating any one of the movable devices according to the first to third embodiments and the modified examples will be described in detail with reference to FIGS.
図15に、光走査システムの一例の概略図を示す。Figure 15 shows a schematic diagram of an example of an optical scanning system.
図15に示すように、光走査システム10は、駆動装置11の制御に従って光源装置12から照射された光を可動装置13の有する反射面14により偏向して被走査面15を光走査するシステムである。可動装置13は、第1~第3実施形態及び変形例に係る可動装置のいずれか1つである。As shown in FIG. 15, the
光走査システム10は、駆動装置11、光源装置12、及び反射面14を有する可動装置13を含む。光走査システム10は、本発明に係る偏向装置の代表的な一例である。The
駆動装置11は、例えばCPU(Central Processing Unit)及びFPGA(Field-Programmable Gate Array)等を備えた電子回路ユニットである。可動装置13は、例えば反射面14を有し、反射面14を可動可能なMEMS(Micro Electromechanical Systems)デバイスである。光源装置12は、例えばレーザを照射するレーザ装置である。なお、被走査面15は、例えばスクリーンである。The driving
駆動装置11は、取得した光走査情報に基づいて光源装置12及び可動装置13の制御命令を生成し、制御命令に基づいて光源装置12及び可動装置13に駆動信号を出力する。The driving
光源装置12は、入力された駆動信号に基づいて光源の照射を行う。可動装置13は、入力された駆動信号に基づいて反射面14を1軸方向又は2軸方向の少なくともいずれかに可動させる。The
これにより、駆動装置11は、例えば、光走査情報の一例である画像情報に基づいた制御によって、可動装置13の反射面14を所定の範囲で2軸方向に往復可動させ、反射面14に入射する光源装置12からの照射光を偏向して光走査する。その結果、駆動装置11は、被走査面15に任意の画像を投影することができる。As a result, the driving
なお、駆動装置11による制御の詳細については後述する。Details about the control by the
次に、図16を参照して、光走査システム10の一例のハードウェア構成について説明する。Next, referring to FIG. 16, we will explain the hardware configuration of an example of the
図16は、光走査システム10の一例のハードウェア構成図である。Figure 16 is a hardware configuration diagram of an example of an
図16に示すように、光走査システム10は、駆動装置11、光源装置12及び可動装置13を備え、それぞれが電気的に接続されている。As shown in FIG. 16, the
[駆動装置]
駆動装置11は、CPU20、RAM21(Random Access Memory)、ROM22(Read Only Memory)、FPGA23、外部I/F24、光源装置ドライバ25、及び光偏向器ドライバ26を備えている。 [Drive unit]
The driving
CPU20は、ROM22等の記憶装置からプログラム又はデータをRAM21上に読み出し、処理を実行して、駆動装置11の全体の制御及び機能を実現する演算装置である。RAM21は、プログラム又はデータを一時保持する揮発性の記憶装置である。The
ROM22は、電源を切ってもプログラム又はデータを保持することができる不揮発性の記憶装置であり、CPU20が光走査システム10の各機能を制御するために実行する処理用プログラム又はデータを記憶している。The
FPGA23は、CPU20の処理に従って、光源装置ドライバ25及び光偏向器ドライバ26に適した制御信号を出力する回路である。The
外部I/F24は、例えば外部装置又はネットワーク等とのインタフェースである。外部装置には、例えば、PC(Personal Computer)等の上位装置、USBメモリ、SDカード、CD、DVD、HDD、又はSD等の記憶装置が含まれる。また、ネットワークは、例えば自動車のCAN(Controller Area Network)、LAN(Local Area Network)、又はンターネット等である。外部I/F24は、外部装置との接続又は通信を可能にする構成であればよく、外部装置ごとに外部I/F24が用意されてもよい。The external I/
光源装置ドライバ25は、入力された制御信号に従って光源装置12に駆動電圧等の駆動信号を出力する電気回路である。The light
光偏向器ドライバ26は、入力された制御信号に従って可動装置13に駆動電圧等の駆動信号を出力する電気回路である。The
駆動装置11において、CPU20は、外部I/F24を介して外部装置又はネットワーク等から光走査情報を取得する。なお、駆動装置11は、CPU20が光走査情報を取得することができる構成であればよく、駆動装置11内のROM22又はFPGA23に光走査情報を格納する構成としてもよい。また、駆動装置11は、内部に新たにSSD等の記憶装置を設けて、その記憶装置に光走査情報を格納する構成としてもよい。In the
ここで、光走査情報とは、被走査面15にどのように光走査させるかを示した情報であり、例えば、光走査により画像を表示する場合は、光走査情報は画像データである。また、例えば、光走査により光書込みを行う場合は、光走査情報は書込み順又は書込み箇所を示した書込みデータである。他にも、例えば、光走査により物体認識を行う場合は、光走査情報は物体認識用の光を照射するタイミングと照射範囲を示す照射データである。Here, the optical scanning information is information that indicates how to optically scan the scanned
駆動装置11は、CPU20の命令及び図16に示したハードウェア構成によって、次に説明する機能構成を実現することができる。The
[駆動装置の機能構成]
次に、図17を参照して、光走査システム10の駆動装置11の機能構成について説明する。図17は、光走査システムの駆動装置の一例の機能ブロック図である。 [Functional configuration of the driving device]
Next, a functional configuration of the driving
図17に示すように、駆動装置11は、機能として制御部30と駆動信号出力部31とを有する。As shown in FIG. 17, the
制御部30は、例えばCPU20及びFPGA23等により実現され、外部装置から光走査情報を取得し、光走査情報を制御信号に変換して駆動信号出力部31に出力する。例えば、制御部30は、制御手段であり、外部装置等から画像データを光走査情報として取得し、所定の処理により画像データから制御信号を生成して駆動信号出力部31に出力する。The
駆動信号出力部31は、印加手段であり、光源装置ドライバ25及び光偏向器ドライバ26等により実現され、入力された制御信号に基づいて光源装置12又は可動装置13に駆動信号を出力する。駆動信号出力部31(印加手段)は、例えば、駆動信号を出力する対象ごとに設けられてもよい。The drive
駆動信号は、光源装置12又は可動装置13の駆動を制御するための信号である。例えば、光源装置12においては、駆動信号は、光源の照射タイミング及び照射強度を制御する駆動電圧である。また、例えば、可動装置13においては、駆動信号は、可動装置13の有する反射面14を可動させるタイミング及び可動範囲を制御する駆動電圧である。なお、駆動装置は、光源装置12又は受光装置等の外部装置から光源の照射タイミング及び受光タイミングを取得し、これらを可動装置13の駆動に同期するようにしてもよい。The drive signal is a signal for controlling the drive of the
[光走査処理]
次に、図18を参照して、光走査システム10が被走査面15を光走査する処理について説明する。図18は、光走査システムに係る処理の一例のフローチャートである。 [Optical scanning process]
Next, a process of optically scanning the
ステップS11において、制御部30は、外部装置等から光走査情報を取得する。In step S11, the
ステップS12において、制御部30は、取得した光走査情報から制御信号を生成し、制御信号を駆動信号出力部31に出力する。In step S12, the
ステップS13において、駆動信号出力部31は、入力された制御信号に基づいて駆動信号を光源装置12及び可動装置13に出力する。In step S13, the drive
ステップS14において、光源装置12は、入力された駆動信号に基づいて光照射を行う。また、可動装置13は、入力された駆動信号に基づいて反射面14の可動を行う。光源装置12及び可動装置13の駆動により、反射面14に入射した光は任意の方向に偏向され、光走査される。In step S14, the
なお、上記光走査システム10では、1つの駆動装置11が光源装置12及び可動装置13を制御するが、光源装置12を制御する駆動装置と可動装置13を制御する駆動装置とを別々に設けてもよい。In the
また、上記光走査システム10では、一つの駆動装置11に制御部30の機能及び駆動信号出力部31の機能を設けている。しかし、これらの機能は別体として存在していてもよく、例えば制御部30を有した駆動装置11とは別に駆動信号出力部31を有した駆動信号出力装置を設けてもよい。なお、上記光走査システム10のうち、反射面14を有した可動装置13と駆動装置11により、光偏向を行う光偏向システムを構成してもよい。In addition, in the
第1~第3実施形態及び変形例に係る可動装置のいずれかを光走査システムに用いることにより、重力の影響による可動装置の走査角の変化及び走査中心の変化が抑制されるため、高精度の光走査が可能となる。By using any of the movable devices according to the first to third embodiments and the modified examples in an optical scanning system, the change in the scanning angle and the scanning center of the movable device caused by the influence of gravity are suppressed, enabling optical scanning with high precision.
[画像投影装置]
次に、図19及び図20を参照して、可動装置13を適用した画像投影装置について詳細に説明する。 [Image Projection Device]
Next, an image projection device to which the
図19は、画像投影装置の一例であるヘッドアップディスプレイ装置500を搭載した自動車400の実施形態に係る概略図である。また、図20はヘッドアップディスプレイ装置500の一例の概略図である。Figure 19 is a schematic diagram of an embodiment of an
画像投影装置は、光走査により画像を投影する装置であり、例えばヘッドアップディスプレイ装置である。An image projection device is a device that projects an image by optical scanning, such as a head-up display device.
図19に示すように、ヘッドアップディスプレイ装置500は、例えば、自動車400のウインドシールド(フロントガラス401等)の付近に設置される。ヘッドアップディスプレイ装置500から発せられる投射光Lがフロントガラス401で反射され、ユーザーである観察者(運転者402)に向かう。As shown in FIG. 19, the head-up
これにより、運転者402は、ヘッドアップディスプレイ装置500によって投影された画像等を虚像として視認することができる。なお、ウインドシールドの内壁面にコンバイナを設置し、コンバイナによって反射する投射光によってユーザーに虚像を視認させる構成にしてもよい。This allows the
図20に示すように、ヘッドアップディスプレイ装置500は、赤色、緑色、及び青色のレーザ光源501R,501G,及び501Bからレーザ光が出射される。出射されたレーザ光は、各レーザ光源に対して設けられるコリメートレンズ502,503,及び504と、2つのダイクロイックミラー505及び506と、光量調整部507とを含む入射光学系に入射する。そして、入射光学系を経たレーザ光は、反射面14を有する可動装置13で偏向される。As shown in FIG. 20, in the head-up
そして、偏向されたレーザ光は、自由曲面ミラー509と、中間スクリーン510と、投射ミラー511とを含む投射光学系を経て、スクリーンに投影される。The deflected laser light then passes through a projection optical system that includes a free-
ヘッドアップディスプレイ装置500では、レーザ光源501R,501G,及び501B、コリメートレンズ502,503,及び504、並びにダイクロイックミラー505及び506は、光源ユニット530として光学ハウジングでユニット化されている。In the head-up
上記ヘッドアップディスプレイ装置500は、中間スクリーン510に表示される中間像を自動車400のフロントガラス401に投射することで、その中間像を運転者402に虚像として視認させる。The head-up
レーザ光源501R,501G,及び501Bから発せられる各色レーザ光は、それぞれ、コリメートレンズ502,503,及び504で略平行光とされ、2つのダイクロイックミラー505及び506により合成される。合成されたレーザ光は、光量調整部507で光量が調整された後、反射面14を有する可動装置13によって二次元走査される。可動装置13で二次元走査された投射光Lは、自由曲面ミラー509で反射されて歪みを補正された後、中間スクリーン510に集光され、中間像を表示する。中間スクリーン510は、例えば、マイクロレンズが二次元配置されたマイクロレンズアレイであり、中間スクリーン510に入射する投射光Lをマイクロレンズ単位で拡大する。The laser light of each color emitted from the
可動装置13は、反射面14を2軸方向に往復可動させ、反射面14に入射する投射光Lを二次元走査する。可動装置13の反射面14は、レーザ光源501R,501G,及び501Bの発光タイミングに同期して制御される。The
以上、画像投影装置の一例としてのヘッドアップディスプレイ装置500の説明をしたが、画像投影装置は、反射面14を有した可動装置13により光走査を行うことで画像を投影する装置であれば、ヘッドアップディスプレイ装置以外であってもよい。The above describes the head-up
画像投影装置は、例えば、机等に置かれ、表示スクリーン上に画像を投影するプロジェクタにも、同様に適用することができる。また、画像投影装置は、観測者の頭部等に装着される装着部材に搭載され、装着部材が有する反射透過スクリーンに投影、又は眼球をスクリーンとして画像を投影するヘッドマウントディスプレイ装置等にも、同様に適用することができる。The image projection device can be similarly applied to, for example, a projector that is placed on a desk or the like and projects an image onto a display screen. The image projection device can also be similarly applied to a head-mounted display device that is mounted on a mounting member that is worn on the observer's head or the like and projects an image onto a reflective/transmissive screen that the mounting member has, or projects an image using the eyeball as a screen.
また、画像投影装置は、車両又は装着部材だけでなく、例えば、航空機、船舶、及び移動式ロボット等の移動体、あるいは、その場から移動せずにマニピュレータ等の駆動対象を操作する作業ロボットなどの非移動体に搭載されてもよい。The image projection device may be mounted not only on a vehicle or a mounting member, but also on a moving body such as an aircraft, a ship, or a mobile robot, or on a non-moving body such as a work robot that operates a drive target such as a manipulator without moving from its location.
第1~第3実施形態及び変形例に係る可動装置のいずれかを画像投影装置に用いることにより、重力の影響による可動装置の走査角の変化及び走査中心の変化が抑制されるため、高精度の画像投影が可能となる。By using any of the movable devices according to the first to third embodiments and the modified examples in an image projection device, changes in the scanning angle and scanning center of the movable device caused by the influence of gravity are suppressed, enabling highly accurate image projection.
[光書込装置]
次に、図21及び図22を参照して、可動装置13を適用した光書込装置について詳細に説明する。 [Optical writing device]
Next, an optical writing device to which the
図21は、光書込装置600を組み込んだ画像形成装置の一例である。また、図22は、光書込装置の一例の概略図である。Figure 21 shows an example of an image forming device incorporating an
図21に示すように、上記光書込装置600は、レーザ光によるプリンタ機能を有するレーザプリンタ650等に代表される画像形成装置の構成部材として使用される。画像形成装置において光書込装置600は、1本又は複数本のレーザビームで被走査面15である感光体ドラムを光走査することにより、感光体ドラムに光書込を行う。As shown in FIG. 21, the
図22に示すように、光書込装置600において、レーザ素子などの光源装置12からのレーザ光は、コリメートレンズなどの結像光学系601を経た後、反射面14を有する可動装置13により1軸方向又は2軸方向に偏向される。As shown in FIG. 22, in an
そして、可動装置13で偏向されたレーザ光は、その後、第一レンズ602aと第二レンズ602b、及び反射ミラー部602cを含む走査光学系602を経て、被走査面15(例えば感光体ドラム又は感光紙)に照射し、光書込みを行う。走査光学系602は、被走査面15にスポット状に光ビームを結像する。The laser light deflected by the
また、光源装置12及び反射面14を有する可動装置13は、駆動装置11の制御に基づき駆動する。In addition, the
このように上記光書込装置600は、レーザ光によるプリンタ機能を有する画像形成装置の構成部材として使用することができる。In this way, the
また、光書込装置600は、走査光学系を異ならせて1軸方向だけでなく2軸方向に光走査することも可能である。光書込装置600は、例えば、レーザ光をサーマルメディアに偏向して2軸方向に光走査し、サーマルメディアを加熱することで印字するレーザラベル装置等の画像形成装置の構成部材として使用することができる。The
上記光書込装置に適用される反射面14を有した可動装置13は、ポリゴンミラー等を用いた回転多面鏡に比べ駆動のための消費電力が小さいため、光書込装置の省電力化に有利である。The
また、可動装置13の振動時における風切り音は回転多面鏡に比べ小さいため、光書込装置の静粛性の改善に有利である。光書込装置は回転多面鏡に比べ設置スペースが圧倒的に少なくて済み、また可動装置13の発熱量もわずかであるため、小型化が容易であり、よって画像形成装置の小型化に有利である。In addition, the wind noise generated by the
第1~第3実施形態及び変形例に係る可動装置のいずれかを光書込装置に用いることにより、重力の影響による可動装置の走査角の変化及び走査中心の変化が抑制されるため、高精度の光書き込みが可能となる。By using any of the movable devices according to the first to third embodiments and the modified examples in an optical writing device, the change in the scanning angle and the scanning center of the movable device caused by the influence of gravity are suppressed, making it possible to perform optical writing with high precision.
[物体認識装置]
次に、図23及び図24を参照して、可動装置13を適用した物体認識装置について詳細に説明する。 [Object Recognition Device]
Next, an object recognition device to which the
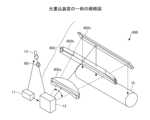
図23は、物体認識装置の一例であるレーザレーダ装置を搭載した自動車の概略図である。また、図24はレーザレーダ装置の一例の概略図である。Figure 23 is a schematic diagram of an automobile equipped with a laser radar device, which is an example of an object recognition device. Also, Figure 24 is a schematic diagram of an example of a laser radar device.
物体認識装置は、対象方向の物体を認識する装置であり、例えばレーザレーダ装置である。An object recognition device is a device that recognizes objects in a target direction, such as a laser radar device.
図23に示すように、レーザレーダ装置700は、例えば自動車701に搭載され、対象方向を光走査して、対象方向に存在する被対象物702からの反射光を受光することで、被対象物702を認識する。As shown in FIG. 23, the
図24に示すように、光源装置12から出射されたレーザ光は、発散光を略平行光とする光学系であるコリメートレンズ703と、平面ミラー704とを含む入射光学系を経て、反射面14を有する可動装置13で1軸もしくは2軸方向に走査される。As shown in FIG. 24, the laser light emitted from the
そして、2軸方向に走査されたレーザ光は、投光光学系である投光レンズ705等を経て装置前方の被対象物702に照射される。光源装置12及び可動装置13は、駆動装置11により駆動を制御される。被対象物702で反射された反射光は、光検出器709により光検出される。The laser light scanned in two axial directions is then irradiated onto the
すなわち、被対象物702で反射された反射光は受光光学系である集光レンズ706等を経て撮像素子707により受光され、撮像素子707は検出信号を信号処理回路708に出力する。信号処理回路708は、入力された検出信号に2値化又はノイズ処理等の所定の処理を行い、結果を測距回路710に出力する。That is, the light reflected by the
測距回路710は、光源装置12がレーザ光を発光したタイミングと、光検出器709でレーザ光を受光したタイミングとの時間差、又は受光した撮像素子707の画素ごとの位相差とによって、被対象物702の有無を認識する。測距回路710は、さらに被対象物702との距離情報を算出する。The
反射面14を有する可動装置13は多面鏡に比べて破損しづらく、小型であるため、耐久性の高い小型のレーダ装置を提供することができる。The
このようなレーザレーダ装置は、例えば、車両、航空機、船舶及び移動式ロボット等の移動体、あるいは、その場から移動せずにマニピュレータ等の駆動対象を操作する作業ロボットなどの非移動体に搭載できる。そして、レーザレーダ装置は、所定範囲を光走査して障害物の有無又は障害物までの距離を認識することができる。Such a laser radar device can be mounted on moving bodies such as vehicles, aircraft, ships, and mobile robots, or on non-moving bodies such as work robots that operate drive objects such as manipulators without moving from their locations. The laser radar device can optically scan a specified range to determine the presence or absence of obstacles and the distance to the obstacles.
なお、上記では、物体認識装置の一例として、レーザレーダ装置700の説明をしたが、物体認識装置はレーザレーダ装置に限定されるものではない。物体認識装置は、反射面14を有した可動装置13を駆動装置11で制御することにより光走査を行い、光検出器により反射光を受光することで被対象物702を認識する装置であれば、レーザレーダ装置以外であってもよい。In the above, the
物体認識装置は、例えば、手又は顔を光走査して得た距離情報から形状等の物体情報を算出し、記録と参照することで対象物を認識する生体認証にも同様に適用することができる。また、物体認識装置は、対象範囲への光走査により侵入物を認識するセキュリティセンサ、及び光走査により得た距離情報から形状等の物体情報を算出して認識し、3次元データとして出力する3次元スキャナの構成部材などにも同様に適用することができる。The object recognition device can be similarly applied to biometric authentication, for example, where object information such as shape is calculated from distance information obtained by optically scanning a hand or face, and the target object is recognized by referring to a record. The object recognition device can also be similarly applied to security sensors that recognize intruding objects by optically scanning a target range, and to components of three-dimensional scanners that calculate and recognize object information such as shape from distance information obtained by optical scanning, and output it as three-dimensional data.
第1~第3実施形態及び変形例に係る可動装置のいずれかを物体認識装置に用いることにより、重力の影響による可動装置の走査角の変化及び走査中心の変化が抑制されるため、高精度の物体認識が可能となる。By using any of the movable devices according to the first to third embodiments and the modified examples in an object recognition device, changes in the scanning angle and scanning center of the movable device caused by the influence of gravity are suppressed, making it possible to recognize objects with high accuracy.
[パッケージング]
次に、図25を参照して、光偏向器である可動装置13のパッケージングについて説明する。 [Packaging]
Next, with reference to FIG. 25, packaging of the
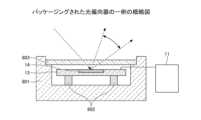
図25は、パッケージングされた光偏向器の一例の概略図である。Figure 25 is a schematic diagram of an example of a packaged optical deflector.
図25に示すように、可動装置13は、凹状のパッケージ部材801の底面に配置される取付部材802に取り付けられている。パッケージ部材801には、可動装置13が配置された領域を覆う透過部材803が設けられている。パッケージ部材801と透過部材803で密閉されることで、可動装置13がパッケージングされる。As shown in FIG. 25, the
さらに、パッケージ内は窒素等の不活性ガスが密封されている。これにより、可動装置13の酸化による劣化が抑制され、さらに温度等の環境の変化に対する耐久性が向上する。In addition, an inert gas such as nitrogen is sealed inside the package. This prevents the
以上、好ましい実施形態等について詳説したが、上述した実施形態等に制限されることはなく、特許請求の範囲に記載された範囲を逸脱することなく、上述した実施形態等に種々の変形及び置換を加えることができる。Although the preferred embodiments have been described above in detail, the present invention is not limited to the above-described embodiments, and various modifications and substitutions can be made to the above-described embodiments without departing from the scope of the claims.
例えば、上記の各実施形態において、可動部を揺動させる駆動手段に圧電素子を用いた圧電駆動方式を用いる例を示したが、これには限定されず、例えば静電力を利用して駆動する静電駆動方式、又は電磁力を利用して駆動する電磁駆動方式を用いてもよい。又、第3実施形態において、主走査方向に可動部を揺動させる駆動手段、副走査方向に可動部を揺動させる駆動手段としていずれも同じ駆動方式を採用しているが、これらは互いに異なる駆動方式を採用してもよい。For example, in each of the above embodiments, an example has been shown in which a piezoelectric driving method using a piezoelectric element is used as the driving means for oscillating the movable part, but this is not limited to this, and for example, an electrostatic driving method that uses electrostatic force for driving, or an electromagnetic driving method that uses electromagnetic force for driving, may also be used. Also, in the third embodiment, the same driving method is used as the driving means for oscillating the movable part in the main scanning direction and the driving means for oscillating the movable part in the sub-scanning direction, but different driving methods may also be used.
また、上記の各実施形態では可動部が反射部を有しているが、可動部は反射部の代わりに回折格子、フォトダイオード、ヒータ(例えば、SiNを用いたヒータ)、光源(例えば、面発光型レーザ)等を有してもよい。In addition, in each of the above embodiments, the movable part has a reflecting part, but the movable part may have a diffraction grating, a photodiode, a heater (e.g., a heater using SiN), a light source (e.g., a surface-emitting laser), etc. instead of a reflecting part.
10 光走査システム
12 光源装置
13 可動装置
14 反射面
15 被走査面
20 CPU
21 RAM
22 ROM
23 FPGA
24 外部I/F
25 光源装置ドライバ
26 光偏向器ドライバ
30 制御部
31 駆動信号出力部
100,100A,100B,100C,100D,100E,200,200A 可動装置
101,201 可動部
101a,201a 中央部
101b,101c,201b,201c 延出部
101d,101e,101f,101g 突出部
102,202 反射部
102a,202a 反射面
103a,103b,203a,203b,203c,203d 駆動部
104a,104b,204 支持部
108 突起部
115,215 梁部
116 接続部
117a,117b 可動部接続部
118a,118b 支持部接続部
119a,119b 駆動素子郡
131 シリコン支持層
132 酸化シリコン層
133 シリコン活性層
135 下部電極
136 圧電部
137 上部電極
219a,219b駆動素子
220a,220b トーション梁
400 自動車
401 フロントガラス
402 運転者
500 ヘッドアップディスプレイ装置
501R,501G,501B レーザ光源
502,503,504 コリメートレンズ
505,506 ダイクロイックミラー
507 光量調整部
509 自由曲面ミラー
510 中間スクリーン
511 投射ミラー
530 光源ユニット
600 光書込装置
601 結像光学系
602 走査光学系
602a 第一レンズ
602b 第二レンズ
602c 反射ミラー部
650 レーザプリンタ
700 レーザレーダ装置
701 自動車
702 被対象物
703 コリメートレンズ
704 平面ミラー
705 投光レンズ
706 集光レンズ
707 撮像素子
708 信号処理回路
709 光検出器
710 測距回路
801 パッケージ部材
802 取付部材
803 透過部材10
21 RAM
22 ROM
23 FPGA
24 External I/F
25 Light source device driver 26 Optical deflector driver 30 Control section 31 Drive signal output section 100, 100A, 100B, 100C, 100D, 100E, 200, 200A Movable device 101, 201 Movable section 101a, 201a Central section 101b, 101c, 201b, 201c Extension parts 101d, 101e, 101f, 101g Projection parts 102, 202 Reflection parts 102a, 202a Reflection surfaces 103a, 103b, 203a, 203b, 203c, 203d Drive parts 104a, 104b, 204 Support part 108 Projection parts 115, 215 Beam part 116 Connection parts 117a, 117b Movable part connection parts 118a, 118b Support part connection parts 119a, 119b Drive element group 131 Silicon support layer 132 Silicon oxide layer 133 Silicon active layer 135 Lower electrode 136 Piezoelectric part 137 Upper electrodes 219a, 219b Drive elements 220a, 220b Torsion beam 400 Automobile 401 Windshield 402 Driver 500 Head-up display device 501R, 501G, 501B Laser light source 502, 503, 504 Collimator lenses 505, 506 Dichroic mirror 507 Light amount adjustment part 509 Free-form surface mirror 510 Intermediate screen 511 Projection mirror 530 Light source unit 600 Optical writing device 601 Imaging optical system 602 Scanning optical system 602a First lens 602b Second lens 602c Reflecting mirror section 650 Laser printer 700 Laser radar device 701 Automobile 702 Object 703 Collimating lens 704 Plane mirror 705 Light projecting lens 706 Condenser lens 707 Image pickup element 708 Signal processing circuit 709 Photodetector 710 Distance measurement circuit 801 Package member 802 Mounting member 803 Transmissive member
Claims (16)
Translated fromJapanese前記可動部に一端が接続され、前記可動部を回動させる駆動部と、を備え、
前記可動部は、前記所定の軸が伸びる方向に延出する延出部を有し、
平面視で、前記可動部は、前記延出部の長手方向の端部に、前記駆動部とは反対側に突出する突出部を有する、可動装置。 A movable part that is rotatable around a predetermined axis;
a drive unit connected to the movable unit at one end and configured to rotate the movable unit,
The movable portionhas an extension portion extending in a direction in which the predetermined axis extends,
A movable device, wherein, in a plan view, the movable portion has a protrusion at a longitudinal end of the extension portion that protrudes on the side opposite the drive portion .
前記可動部に一端が接続され、前記可動部を回動させる駆動部と、を備え、
前記可動部は、前記所定の軸が伸びる方向に延出する延出部を有し、
平面視で、前記可動部は、前記延出部の長手方向の端部に、前記駆動部の側に突出する突出部を有する、可動装置。 A movable part that is rotatable around a predetermined axis;
a drive unit connected to the movable unit at one end and configured to rotate the movable unit,
The movable portionhas an extension portion extending in a direction in which the predetermined axis extends,
A movable device, wherein, in a plan view, the movable portion has a protrusion at a longitudinal end of the extension portion that protrudes toward the drive portion .
前記延出部は、前記中央部の前記所定の軸に直交する方向の一端部の両側から前記所定の軸が伸びる方向に延出する第1延出部と、前記中央部の前記所定の軸に直交する方向の他端部の両側から前記所定の軸が伸びる方向に延出する第2延出部と、を含む、請求項1乃至7のいずれか一項に記載の可動装置。 the movable portion has a central portion disposed so as to straddle the predetermined axis,
The movable device according to any one of claims 1 to 7, wherein the extension portion includes a first extension portion extending in the direction in which the specified axis extends from both sides of one end of the central portion in a direction perpendicular to the specified axis, and a second extension portion extending in the direction in which the specified axis extends from both sides of the other end of the central portion in a direction perpendicular to the specifiedaxis .
前記開口部の内側には、第2可動部が配置され、
前記第2可動部は、前記所定の軸と直交する他の軸を中心に回動可能に前記中央部に支持されている、請求項8乃至10のいずれか一項に記載の可動装置。 The central portion has an opening,
A second movable part is disposed inside the opening,
The movable device according to claim8, wherein the second movable portion is supported by the central portion so as to be rotatable about another axis perpendicular to the predetermined axis.
光源と、
を備えた偏向装置。 A movable device according to any one of claims 1 to12 ,
A light source;
A deflection device comprising:
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021047767AJP7608909B2 (en) | 2021-03-22 | 2021-03-22 | Movable device, deflection device, object recognition device, image projection device, and moving body |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2021047767AJP7608909B2 (en) | 2021-03-22 | 2021-03-22 | Movable device, deflection device, object recognition device, image projection device, and moving body |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2022146675A JP2022146675A (en) | 2022-10-05 |
| JP7608909B2true JP7608909B2 (en) | 2025-01-07 |
Family
ID=83461616
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021047767AActiveJP7608909B2 (en) | 2021-03-22 | 2021-03-22 | Movable device, deflection device, object recognition device, image projection device, and moving body |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7608909B2 (en) |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003084226A (en) | 2001-09-14 | 2003-03-19 | Ricoh Co Ltd | Optical scanning device |
| JP2005099186A (en) | 2003-09-22 | 2005-04-14 | Fuji Photo Film Co Ltd | Optical modulation device, optical modulation array device and exposure apparatus using the same |
| JP2010002637A (en) | 2008-06-19 | 2010-01-07 | Canon Electronics Inc | Optical scanning apparatus |
| JP2011095290A (en) | 2009-10-27 | 2011-05-12 | Seiko Epson Corp | Optical deflection element, optical deflector and image forming apparatus |
| WO2014122781A1 (en) | 2013-02-08 | 2014-08-14 | パイオニア株式会社 | Actuator |
| JP2018155989A (en) | 2017-03-21 | 2018-10-04 | 株式会社リコー | Optical scan system, image projection device, and object recognition device |
| US20200057298A1 (en) | 2018-08-14 | 2020-02-20 | Stmicroelectronics S.R.L. | Micromechanical device having a structure tiltable by a quasi-static piezoelectric actuation and having stiffening elements |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5718075B2 (en)* | 2011-01-24 | 2015-05-13 | スタンレー電気株式会社 | Optical deflection module |
- 2021
- 2021-03-22JPJP2021047767Apatent/JP7608909B2/enactiveActive
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003084226A (en) | 2001-09-14 | 2003-03-19 | Ricoh Co Ltd | Optical scanning device |
| JP2005099186A (en) | 2003-09-22 | 2005-04-14 | Fuji Photo Film Co Ltd | Optical modulation device, optical modulation array device and exposure apparatus using the same |
| JP2010002637A (en) | 2008-06-19 | 2010-01-07 | Canon Electronics Inc | Optical scanning apparatus |
| JP2011095290A (en) | 2009-10-27 | 2011-05-12 | Seiko Epson Corp | Optical deflection element, optical deflector and image forming apparatus |
| WO2014122781A1 (en) | 2013-02-08 | 2014-08-14 | パイオニア株式会社 | Actuator |
| JP2018155989A (en) | 2017-03-21 | 2018-10-04 | 株式会社リコー | Optical scan system, image projection device, and object recognition device |
| US20200057298A1 (en) | 2018-08-14 | 2020-02-20 | Stmicroelectronics S.R.L. | Micromechanical device having a structure tiltable by a quasi-static piezoelectric actuation and having stiffening elements |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2022146675A (en) | 2022-10-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7167500B2 (en) | Mobile devices, image projection devices, head-up displays, laser headlamps, head-mounted displays, object recognition devices, and vehicles | |
| US11750779B2 (en) | Light deflector, optical scanning system, image projection device, image forming apparatus, and lidar device | |
| US11644664B2 (en) | Light deflector, optical scanning system, image projection device, image forming apparatus, and lidar device | |
| JP7451930B2 (en) | Optical deflectors, deflection devices, distance measuring devices, image projection devices, and vehicles | |
| JP7225771B2 (en) | Mobile devices, distance measuring devices, image projection devices, vehicles, and pedestals | |
| JP7501762B2 (en) | Movable device, image projection device, head-up display, laser headlamp, head-mounted display, object recognition device, and vehicle | |
| JP2017116842A (en) | Optical deflector and image projection apparatus | |
| JP7243174B2 (en) | Mobile devices, distance measuring devices, image projection devices, and vehicles | |
| JP7593186B2 (en) | Optical deflector, image projection device, head-up display, laser headlamp, head-mounted display, distance measuring device, and moving body | |
| US11789258B2 (en) | Light deflector, deflecting device, object recognition device, image projection device, and mobile object | |
| JP2018022004A (en) | Optical deflector and image display system | |
| JP7459580B2 (en) | Mobile devices, image projection devices, head-up displays, laser headlamps, head-mounted displays, object recognition devices, and moving objects | |
| JP7639424B2 (en) | Movable device, image projection device, head-up display, laser headlamp, head-mounted display, distance measuring device, and moving body | |
| JP2021067722A (en) | Movable device, image projection device, head-up display, laser head lamp, head-mounted display, object recognition device, and vehicle | |
| JP2021085983A (en) | Optical deflector, deflecting device, distance measuring device, image projection device, and vehicle | |
| JP7608909B2 (en) | Movable device, deflection device, object recognition device, image projection device, and moving body | |
| US12235440B2 (en) | Movable apparatus | |
| JP7459579B2 (en) | Mobile devices, image projection devices, head-up displays, laser headlamps, head-mounted displays, object recognition devices, and moving objects | |
| JP7635590B2 (en) | Optical deflector, image projection device, head-up display, laser headlamp, head-mounted display, distance measuring device and moving body | |
| JP7563091B2 (en) | Optical deflector, deflection device, object recognition device, image projection device, and moving object | |
| JP2021071582A (en) | Light deflector, image projection device, head-up display, laser head lamp, head-mounted display, object recognition device, and vehicle | |
| JP7247553B2 (en) | Mobile devices, image projection devices, head-up displays, laser headlamps, head-mounted displays, object recognition devices, and vehicles | |
| US12196947B2 (en) | Operating device, light deflector, light deflecting device, distance measurement apparatus, image projection apparatus, and mobile object | |
| JP7669826B2 (en) | Semiconductor device and method for manufacturing the same | |
| JP7501281B2 (en) | Optical deflector, deflection device, distance measuring device, image projection device, and moving body |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination | Free format text:JAPANESE INTERMEDIATE CODE: A621 Effective date:20240119 | |
| A977 | Report on retrieval | Free format text:JAPANESE INTERMEDIATE CODE: A971007 Effective date:20240813 | |
| A131 | Notification of reasons for refusal | Free format text:JAPANESE INTERMEDIATE CODE: A131 Effective date:20240820 | |
| A521 | Request for written amendment filed | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20241017 | |
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 Effective date:20241119 | |
| A61 | First payment of annual fees (during grant procedure) | Free format text:JAPANESE INTERMEDIATE CODE: A61 Effective date:20241202 | |
| R150 | Certificate of patent or registration of utility model | Ref document number:7608909 Country of ref document:JP Free format text:JAPANESE INTERMEDIATE CODE: R150 |