JP7001038B2 - 運転状態判定方法 - Google Patents
運転状態判定方法Download PDFInfo
- Publication number
- JP7001038B2 JP7001038B2JP2018197650AJP2018197650AJP7001038B2JP 7001038 B2JP7001038 B2JP 7001038B2JP 2018197650 AJP2018197650 AJP 2018197650AJP 2018197650 AJP2018197650 AJP 2018197650AJP 7001038 B2JP7001038 B2JP 7001038B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- image data
- driver
- camera
- face
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034methodMethods0.000titleclaimsdescription45
- 238000006243chemical reactionMethods0.000claimsdescription14
- 230000002159abnormal effectEffects0.000description3
- 230000000694effectsEffects0.000description3
- 238000012544monitoring processMethods0.000description2
- 239000000470constituentSubstances0.000description1
- 238000010586diagramMethods0.000description1
Images









Landscapes
- Fittings On The Vehicle Exterior For Carrying Loads, And Devices For Holding Or Mounting Articles (AREA)
- Image Analysis (AREA)
Description
本発明は、カメラによって撮影される画像データに基づき、操舵時の運転者の運転状態、例えば、正常状態か、あるいは、居眠り運転や脇見運転等の非正常状態か、を判定可能な運転状態判定方法に関する。
従来、自動車を操舵する運転者が正常状態か否かを判定する際の運転者状態監視システムとして、ステアリングホイールの中央のエアバッグ装置(ボス部)の上縁位置に、運転者の顔を撮影するカメラを配置する場合があった(例えば、特許文献1参照)。このカメラの配置位置では、インストルメントパネルやコラムカバーにカメラを搭載する場合に比べ、操舵時のステアリングホイールのスポーク部等にカメラが遮蔽されないことから、運転者の顔の撮影に好適となる。そして、このシステムでは、運転者の操舵時におけるステアリングホイールの操舵角に応じて、撮影画像データを直進操舵時の状態に補正して、その補正画像に基づき、目の開度値等を算出して、運転者が居眠り状態か否かを判定していた。
しかし、従来の運転者状態監視システムでは、操舵時に撮影した画像データを操舵角度に応じて補正し、そして、その補正画像データから、運転者の目の開度値等を算出し、その算出した値から、運転者の状態を判定しており、比較する基準データ等が有る訳ではなく、そのため、操舵時の運転状態自体を、迅速、かつ、安定して、判定する点に、改善の余地があった。
本発明は、上述の課題を解決するものであり、操舵時の運転者の運転状態を、迅速かつ安定して、判定可能な運転状態判定方法を提供することを目的とする。
本発明に係る第1番目の運転状態判定方法は、操舵時の運転者の顔を撮影するカメラが、ステアリングホイールにおける運転者の顔と対向する部位に、配設され、
前記カメラによって撮影される画像データに基づき、操舵時の運転者の運転状態を判定する運転状態判定方法であって、
直進操舵時の基準カメラ位置で運転者の顔を撮影した基準画像データを基準として、
操舵中に撮影する操舵時画像データを、操舵角の角度変化に対応させて、直進操舵状態に変換した補正画像データと、
前記基準画像データと、
を、比較して判定することを特徴とする。
前記カメラによって撮影される画像データに基づき、操舵時の運転者の運転状態を判定する運転状態判定方法であって、
直進操舵時の基準カメラ位置で運転者の顔を撮影した基準画像データを基準として、
操舵中に撮影する操舵時画像データを、操舵角の角度変化に対応させて、直進操舵状態に変換した補正画像データと、
前記基準画像データと、
を、比較して判定することを特徴とする。
本発明に係る第1番目の運転状態判定方法では、操舵中のカメラで撮影した操舵時画像データ(特に、顔の目、鼻、口がどこにあるかの位置関係の位置データ)を、直進操舵時の状態に変換して、補正画像データを作成し、その補正画像データと、直進操舵時の基準カメラ位置で運転者の顔を撮影した基準画像データ(正面を向いた顔の目、鼻、口がどこにあるかの位置関係の位置データ)と、を比較できることとなり、基準画像データが判定基準画像データとなり、その判定基準画像データを基に、補正画像データが、どの程度、異なっているか、例えば、運転者の目、鼻、口の位置、向き、開き等が、どの程度、異なっているかを、直ちに、比較できて、その差から、運転者の運転状態を、迅速かつ安定して、判定できる。例えば、目を瞑っていれば、居眠り状態と判定でき、横を向いていれば、脇見運転と判定できる。また、カメラは、ステアリングホイールにおける運転者の顔と対向する部位の、例えば、リング部やボス部に搭載され、操舵時のステアリングホイールのスポーク部等に隠れるインストルメントパネルやコラムカバーに搭載されていないことから、操舵時のステアリングホイールのスポーク部等にカメラが遮蔽されず、運転者の顔の撮影に好適となる。
したがって、本発明に係る第1番目の運転状態判定方法では、操舵時の運転者の運転状態を、迅速かつ安定して、判定可能となる。
また、本発明に係る第2番目の運転状態判定方法では、操舵時の運転者の顔を撮影するカメラが、ステアリングホイールにおける運転者の顔と対向する部位に、配設され、
前記カメラによって撮影される画像データに基づき、操舵時の運転者の運転状態を判定する運転状態判定方法であって、
操舵中に撮影する操舵時画像データと、
直進操舵時の基準カメラ位置で運転者の顔を撮影した基準画像データを、操舵角の角度変化に対応させて、変換させた基準変換画像データと、
を、比較して判定することを特徴とする。
前記カメラによって撮影される画像データに基づき、操舵時の運転者の運転状態を判定する運転状態判定方法であって、
操舵中に撮影する操舵時画像データと、
直進操舵時の基準カメラ位置で運転者の顔を撮影した基準画像データを、操舵角の角度変化に対応させて、変換させた基準変換画像データと、
を、比較して判定することを特徴とする。
本発明に係る第2番目の運転状態判定方法では、直進操舵時の基準カメラ位置で運転者の顔を撮影した基準画像データ(正面を向いた顔の目、鼻、口がどこにあるかの位置関係の位置データ)を、操舵角の角度変化に対応させて、変換させた基準変換画像データとし、その基準変換画像データと、操舵中のカメラで撮影した操舵時画像データ(顔の目、鼻、口がどこにあるかの位置関係の位置データ)と、を比較できることとなり、基準変換画像データが判定基準画像データとなり、その判定基準画像データを基に、操舵時画像データが、どの程度、異なっているか、例えば、運転者の目、鼻、口の位置、向き、開き等が、どの程度、異なっているかを、直ちに、比較できて、その差から、運転者の運転状態を、迅速かつ安定して、判定できる。例えば、目を瞑っていれば、居眠り状態と判定でき、横を向いていれば、脇見運転と判定できる。また、カメラは、ステアリングホイールにおける運転者の顔と対向する部位の、例えば、リング部やボス部に搭載され、操舵時のステアリングホイールのスポーク部等に隠れるインストルメントパネルやコラムカバーに搭載されていないことから、操舵時のステアリングホイールのスポーク部等にカメラが遮蔽されず、運転者の顔の撮影に好適となる。
したがって、本発明に係る第2番目の運転状態判定方法でも、操舵時の運転者の運転状態を、迅速かつ安定して、判定可能となる。
本発明に係る第3番目の運転状態判定方法では、操舵時の運転者の顔を撮影するカメラが、ステアリングホイールにおける運転者の顔と対向する部位に、配設され、
前記カメラによって撮影される画像データに基づき、操舵時の運転者の運転状態を判定する運転状態判定方法であって、
操舵中に撮影する操舵時画像データと、
操舵角に応じて準備された複数のテンプレート画像データの内の、前記操舵時画像データの撮影時の操舵角に応じて選択した選択テンプレート画像データと、
を、比較して判定することを特徴とする。
前記カメラによって撮影される画像データに基づき、操舵時の運転者の運転状態を判定する運転状態判定方法であって、
操舵中に撮影する操舵時画像データと、
操舵角に応じて準備された複数のテンプレート画像データの内の、前記操舵時画像データの撮影時の操舵角に応じて選択した選択テンプレート画像データと、
を、比較して判定することを特徴とする。
本発明に係る第3番目の運転状態判定方法では、操舵角に応じて準備された複数のテンプレート画像データの内の、操舵時画像データの撮影時の操舵角に応じて選択した選択テンプレート画像データと、操舵中のカメラで撮影した操舵時画像データと、を比較できることとなり、選択テンプレート画像データが判定基準画像データとなり、その判定基準画像データを基に、操舵時画像データが、どの程度、異なっているか、例えば、運転者の目、鼻、口の位置、向き、開き等が、どの程度、異なっているかを、直ちに、比較できて、その差から、運転者の運転状態を、迅速かつ安定して、判定できる。例えば、目を瞑っていれば、居眠り状態と判定でき、横を向いていれば、脇見運転と判定できる。また、カメラは、ステアリングホイールにおける運転者の顔と対向する部位の、例えば、リング部やボス部に搭載され、操舵時のステアリングホイールのスポーク部等に隠れるインストルメントパネルやコラムカバーに搭載されていないことから、操舵時のステアリングホイールのスポーク部等にカメラが遮蔽されず、運転者の顔の撮影に好適となる。
したがって、本発明に係る第3番目の運転状態判定方法でも、操舵時の運転者の運転状態を、迅速かつ安定して、判定可能となる。
以下、本発明の一実施形態を図面に基づいて説明すると、図1~3に示すように、第1実施形態に使用するステアリングホイール1は、運転者10が把持するリング部2と、リング部2の中心に配置されるボス部3と、ボス部3とリング部2とを連結するスポーク部4と、を備えて構成されている。リング部2における12時の位置に、すなわち、直進操舵時の前端位置に、運転者10の顔11を撮影可能なカメラ6が、運転者10側に向いて配設されている。
操舵時のカメラ6は、図1に示すように、ステアリングホイール1を、例えば、反時計回り方向に角度Φ分、操舵すれば、リング部2の面上でのカメラ6の位置は、
x´=rsinΦ
y´=0
z´=rcosΦ
の座標位置となる。
x´=rsinΦ
y´=0
z´=rcosΦ
の座標位置となる。
またその際、ステアリングホイール1の操舵中心軸の傾斜角度θを考慮した状態での三次元の原点位置(0,0,0)を基準とすれば、
x=rsinΦ
y=Lsinθ-rcosΦ・cosθ
z=Lcosθ+rcosΦ・sinθ
の座標位置となる。
x=rsinΦ
y=Lsinθ-rcosΦ・cosθ
z=Lcosθ+rcosΦ・sinθ
の座標位置となる。
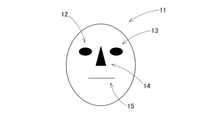
また、直進操舵時のリング部2に配置されたカメラ6が運転者10の顔11を撮影する状態では、図3に示すように、角度ω分、上向きの状態での撮影となるものの、撮影画像は、図4に示すような画像となる。そして仮に、図4に示す運転姿勢の運転者より大柄であれば、上向き角度ωが大きくなり、図5に示すように、図4に比べて、顔11が小さくなり、目12,13、鼻14、口15が上寄りとなる画像となる。なお、上向き角度ωは、カメラ6が下方に配置される場合でも、大きくなる。
そして、例えば、図4の画像を運転者の基準画像とすれば、ステアリングホイール1を反時計回り方向に操舵角Φ分、操舵すれば、図6に示すように、操舵角θ分、回転したリング部2のカメラ6からの撮影画像は、傾いた画像となる。
このように、カメラ6が、ステアリングホイール1における運転者10の顔11と対向する部位の、例えば、リング部2に搭載される場合には、操舵時のステアリングホイール1のスポーク部4等に隠れるインストルメントパネルやコラムカバーに搭載されていないことから、操舵時のステアリングホイール1のスポーク部等にカメラ6が遮蔽されず、運転者10の顔11の撮影に好適となるものの、操舵時に、撮影画像が傾斜することが避けられず、運転者10が、操舵時に、例えば、居眠りしていたり、脇見運転していれば、正常状態でないことから、注意喚起等が必要となる。
第1実施形態の判定方法に使用する構成機器としては、操舵時の運転者10の運転状態を判定できるように、図7に示すように、リング部2に搭載されたカメラ6と、操作時のステアリングホイール1の操作角を検出可能に、ステアリングホイール1のボス部3内等に配設される舵角センサ7と、ボス部3内等に配設される制御部8と、制御部8が操舵時の運転者10の顔11の画像から非正常運転状態と判定した際に、車両のスピーカ等から注意喚起音を発生させるための出力部9と、を備えてなる。
そして、第1実施形態の判定方法では、直進操舵時の基準カメラ位置P0で運転者10の顔11を撮影した基準画像データを基準として、操舵中に撮影する操舵時画像データを、操舵角の角度変化に対応させて、直進操舵状態に変換した補正画像データと、基準画像データと、を、比較して判定する。
すなわち、図8に示すように、制御部8では、ステップ11において、カメラ6からの画像データを入力し、また、ステップ12において、操舵角のデータを入力する。そして、操舵角のデータから、直進操舵時とする操舵角を0°としていれば、ステップ13において、その際に入力した画像データを基準画像データ(正面を向いた顔の目、鼻、口がどこにあるかの位置関係の位置データ)として取得しておく。その後、操舵中であれば、ステップ14において、その操舵中の操舵時画像データ(顔の目、鼻、口がどこにあるかの位置関係の位置データ)を取得するとともに、その操舵角のデータを取得する。ついで、ステップ15において、ステップ14で取得した操舵時画像データを、同時に取得した操舵角における操舵角0°の直進操舵時からの角度変化に対応させて、直進操舵状態に変換した補正画像データを算出する。そして、ステップ16において、ステップ13で取得しておいた基準画像データと、ステップ15で算出した補正画像データと、を比較して、運転者10の顔11における目12,13、鼻14、口15の開度値や向き等が、基準画像データから、どのように変化しているかを判定して、例えば、居眠り運転、あるいは、脇見運転と判定すれば、ステップ17に移行して、その旨の注意喚起の音をスピーカ等から発音させるように、出力する。
以上のように、第1実施形態の判定方法では、操舵中のカメラ6で撮影した操舵時画像データを、直進操舵時の状態に変換して、補正画像データを作成し、その補正画像データと、直進操舵時の基準カメラ位置P0で運転者10の顔11を撮影した基準画像データと、を比較できることとなり、基準画像データが判定基準画像データとなり、その判定基準画像データを基に、補正画像データが、どの程度、異なっているか、例えば、運転者10の目12,13、鼻14、口15の位置、向き、開き等が、どの程度、異なっているかを、直ちに、比較できて、その差から、運転者10の運転状態を、迅速かつ安定して、判定できる。例えば、目12,13を瞑っていれば、居眠り状態と判定でき、横を向いていれば、脇見運転と判定できる。また、カメラ6は、ステアリングホイール1における運転者10の顔11と対向する部位のリング部2に搭載され、操舵時のステアリングホイール1のスポーク部4等に隠れるインストルメントパネルやコラムカバーに搭載されていないことから、操舵時のステアリングホイール1のスポーク部4等にカメラ6が遮蔽されず、運転者10の顔11の撮影に好適となる。
したがって、第1実施形態の運転状態判定方法では、操舵時の運転者10の運転状態を、迅速かつ安定して、判定可能となる。
なお、ステップ13で取得する基準画像データは、予め、制御部8に記憶させておいてもよく、ステップ16において、予め、記憶させておいた基準画像データと、角度補正した補正画像データとを比較すればよい。
また、第1実施形態では、カメラ6をリング部2に搭載した場合を示したが、図1の二点鎖線に示すように、ボス部3に搭載してもよい。
つぎに、第2実施形態の判定方法を説明すると、第2実施形態の判定方法に使用する構成機器は、第1実施形態と同様に、操舵時の運転者10の運転状態を判定できるように、図7に示すように、リング部2に搭載されたカメラ6と、操作時のステアリングホイール1の操作角を検出可能に、ステアリングホイール1のボス部3内等に配設される舵角センサ7と、ボス部3内等に配設される制御部8と、制御部8が操舵時の運転者10の顔11の画像から非正常運転状態と判定した際に、車両のスピーカ等から注意喚起音を発生させるための出力部9と、を備えてなる。なお、制御部8での判定方法は、第2実施形態では、第1実施形態とは後述するように、異なっている。
第2実施形態の判定方法では、操舵中に撮影する操舵時画像データと、直進操舵時の基準カメラ位置P0で運転者10の顔11を撮影した基準画像データを、操舵角の角度変化に対応させて、変換させた基準変換画像データと、を、比較して判定する。
すなわち、図9に示すように、制御部8では、ステップ21において、カメラ6からの画像データを入力し、また、ステップ22において、操舵角のデータを入力する。そして、操舵角のデータから、直進操舵時とする操舵角を0°としていれば、ステップ23において、その際に入力した画像データを基準画像データ(正面を向いた顔の目、鼻、口がどこにあるかの位置関係の位置データ)として取得しておく。その後、操舵中であれば、ステップ24において、その操舵中の操舵時画像データ(顔の目、鼻、口がどこにあるかの位置関係の位置データ)を取得するとともに、その操舵角のデータを取得する。ついで、ステップ25において、ステップ23で取得した基準画像データを、ステップ24で取得した操舵角における操舵角0°の直進操舵時からの角度変化に対応させて、変換させた基準変換画像データを算出する。そして、ステップ26において、ステップ24で取得しておいた操舵時画像データと、ステップ25で算出した基準変換画像データと、を比較して、運転者10の顔11における目12,13、鼻14、口15の開度値や向き等が、基準変換画像データから、どのように変化しているかを判定して、例えば、居眠り運転、あるいは、脇見運転と判定すれば、ステップ27に移行して、その旨の注意喚起の音をスピーカ等から発音させるように、出力する。
以上のように、第2実施形態の判定方法では、直進操舵時の基準カメラ位置P0で運転者10の顔11を撮影した基準画像データを、操舵角の角度変化に対応させて、変換させた基準変換画像データとし、その基準変換画像データと、操舵中のカメラ6で撮影した操舵時画像データと、を比較できることとなり、基準変換画像データが判定基準画像データとなり、その判定基準画像データを基に、操舵時画像データが、どの程度、異なっているか、例えば、運転者10の目12,13、鼻14、口15の位置、向き、開き等が、どの程度、異なっているかを、直ちに、比較できて、その差から、運転者10の運転状態を、迅速かつ安定して、判定できる。例えば、目12,13を瞑っていれば、居眠り状態と判定でき、横を向いていれば、脇見運転と判定できる。また、カメラ6は、ステアリングホイール1における運転者10の顔11と対向する部位のリング部2に搭載され、操舵時のステアリングホイール1のスポーク部4等に隠れるインストルメントパネルやコラムカバーに搭載されていないことから、操舵時のステアリングホイール1のスポーク部4等にカメラ6が遮蔽されず、運転者10の顔11の撮影に好適となる。
したがって、第2実施形態の運転状態判定方法でも、操舵時の運転者10の運転状態を、迅速かつ安定して、判定可能となる。
なお、第2実施形態でも、ステップ23で取得する基準画像データは、予め、制御部8に記憶させておいてもよく、その場合でも、ステップ25において、操舵角に応じて、変換して、ステップ26において、比較すればよい。
つぎに、第3実施形態の判定方法を説明すると、第3実施形態の判定方法に使用する構成機器も、第1,2実施形態と同様に、操舵時の運転者10の運転状態を判定できるように、図7に示すように、リング部2に搭載されたカメラ6と、操作時のステアリングホイール1の操作角を検出可能に、ステアリングホイール1のボス部3内等に配設される舵角センサ7と、ボス部3内等に配設される制御部8と、制御部8が操舵時の運転者10の顔11の画像から非正常運転状態と判定した際に、車両のスピーカ等から注意喚起音を発生させるための出力部9と、を備えてなる。なお、制御部8での判定方法は、第3実施形態では、第1,2実施形態とは後述するように、異なっている。
第3実施形態の判定方法では、操舵中に撮影する操舵時画像データと、操舵角に応じて準備された複数のテンプレート画像データの内の、操舵時画像データの撮影時の操舵角に応じて選択した選択テンプレート画像データと、を、比較して判定する。
すなわち、図10に示すように、制御部8では、ステップ31において、操舵中のカメラ6からの画像データを入力し、また、ステップ32において、操舵角のデータを入力する。そして、ステップ33において、その操舵時の操舵角から、予め、準備しておいた多数のテンプレート画像の内から、その操舵角に対応するテンプレート画像データを選択して、その選択テンプレート画像データを取得する。ついで、ステップ34において、ステップ33で取得した選択テンプレート画像データと、ステップ31で取得した操舵時画像データと、を比較して、運転者10の顔11における目12,13、鼻14、口15の開度値や向き等が、選択テンプレート画像データから、どのように変化しているかを判定して、例えば、居眠り運転、あるいは、脇見運転と判定すれば、ステップ35に移行して、その旨の注意喚起の音をスピーカ等から発音させるように、出力する。
以上のように、第3実施形態の判定方法では、操舵角に応じて準備された複数のテンプレート画像データの内の、操舵時画像データの撮影時の操舵角に応じて選択した選択テンプレート画像データと、操舵中のカメラ6で撮影した操舵時画像データと、を比較できることとなり、選択テンプレート画像データが判定基準画像データとなり、その判定基準画像データを基に、操舵時画像データが、どの程度、異なっているか、例えば、運転者10の目12,13、鼻14、口15の位置、向き、開き等が、どの程度、異なっているかを、直ちに、比較できて、その差から、運転者10の運転状態を、迅速かつ安定して、判定できる。例えば、目12,13を瞑っていれば、居眠り状態と判定でき、横を向いていれば、脇見運転と判定できる。また、カメラ6は、ステアリングホイール1における運転者10の顔11と対向する部位のリング部2に搭載され、操舵時のステアリングホイール1のスポーク部4等に隠れるインストルメントパネルやコラムカバーに搭載されていないことから、操舵時のステアリングホイール1のスポーク部4等にカメラ6が遮蔽されず、運転者10の顔11の撮影に好適となる。
したがって、第3実施形態の運転状態判定方法でも、操舵時の運転者10の運転状態を、迅速かつ安定して、判定可能となる。
なお、第3実施形態では、予め準備しておくテンプレート画像のデータを、多数準備する必要があるものの、第1,2実施形態のように、操舵角に対応させて、補正画像データや基準変換画像データを算出する工程が無い分、迅速に判定を行うことができる。
1…ステアリングホイール、2…リング部、3…ボス部、6…カメラ、10…運転者、P0…基準カメラ位置。
Claims (3)
- 操舵時の運転者の顔を撮影するカメラが、ステアリングホイールにおける運転者の顔と対向する部位に、配設され、
前記カメラによって撮影される画像データに基づき、操舵時の運転者の運転状態を判定する運転状態判定方法であって、
直進操舵時の基準カメラ位置で運転者の顔を撮影した基準画像データを基準として、
操舵中に撮影する操舵時画像データを、操舵角の角度変化に対応させて、直進操舵状態に変換した補正画像データと、
前記基準画像データと、
を、比較して判定することを特徴とする運転状態判定方法。 - 操舵時の運転者の顔を撮影するカメラが、ステアリングホイールにおける運転者の顔と対向する部位に、配設され、
前記カメラによって撮影される画像データに基づき、操舵時の運転者の運転状態を判定する運転状態判定方法であって、
操舵中に撮影する操舵時画像データと、
直進操舵時の基準カメラ位置で運転者の顔を撮影した基準画像データを、操舵角の角度変化に対応させて、変換させた基準変換画像データと、
を、比較して判定することを特徴とする運転状態判定方法。 - 操舵時の運転者の顔を撮影するカメラが、ステアリングホイールにおける運転者の顔と対向する部位に、配設され、
前記カメラによって撮影される画像データに基づき、操舵時の運転者の運転状態を判定する運転状態判定方法であって、
操舵中に撮影する操舵時画像データと、
操舵角に応じて準備された複数のテンプレート画像データの内の、前記操舵時画像データの撮影時の操舵角に応じて選択した選択テンプレート画像データと、
を、比較して判定することを特徴とする運転状態判定方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018197650AJP7001038B2 (ja) | 2018-10-19 | 2018-10-19 | 運転状態判定方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018197650AJP7001038B2 (ja) | 2018-10-19 | 2018-10-19 | 運転状態判定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020063018A JP2020063018A (ja) | 2020-04-23 |
| JP7001038B2true JP7001038B2 (ja) | 2022-01-19 |
Family
ID=70386984
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018197650AActiveJP7001038B2 (ja) | 2018-10-19 | 2018-10-19 | 運転状態判定方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP7001038B2 (ja) |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006215743A (ja) | 2005-02-02 | 2006-08-17 | Toyota Motor Corp | 画像処理装置及び画像処理方法 |
| JP2007072774A (ja) | 2005-09-07 | 2007-03-22 | Aisin Seiki Co Ltd | 運転者監視システム |
| JP2010013090A (ja) | 2008-07-04 | 2010-01-21 | Hyundai Motor Co Ltd | 運転者状態監視システム |
| JP2014115983A (ja) | 2012-11-16 | 2014-06-26 | Toyoda Gosei Co Ltd | 運転者用警告装置 |
| JP2016136332A (ja) | 2015-01-23 | 2016-07-28 | 沖電気工業株式会社 | 情報処理装置、情報処理方法及び記憶媒体 |
| JP2018127056A (ja) | 2017-02-07 | 2018-08-16 | 豊田合成株式会社 | ステアリング装置及び運転者用警告装置 |
- 2018
- 2018-10-19JPJP2018197650Apatent/JP7001038B2/jaactiveActive
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006215743A (ja) | 2005-02-02 | 2006-08-17 | Toyota Motor Corp | 画像処理装置及び画像処理方法 |
| JP2007072774A (ja) | 2005-09-07 | 2007-03-22 | Aisin Seiki Co Ltd | 運転者監視システム |
| JP2010013090A (ja) | 2008-07-04 | 2010-01-21 | Hyundai Motor Co Ltd | 運転者状態監視システム |
| JP2014115983A (ja) | 2012-11-16 | 2014-06-26 | Toyoda Gosei Co Ltd | 運転者用警告装置 |
| JP2016136332A (ja) | 2015-01-23 | 2016-07-28 | 沖電気工業株式会社 | 情報処理装置、情報処理方法及び記憶媒体 |
| JP2018127056A (ja) | 2017-02-07 | 2018-08-16 | 豊田合成株式会社 | ステアリング装置及び運転者用警告装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2020063018A (ja) | 2020-04-23 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4751939B2 (ja) | 車載カメラの校正装置 | |
| JP4636346B2 (ja) | 車載カメラの校正装置、方法、及びプログラム | |
| JP6361382B2 (ja) | 車両の制御装置 | |
| JP6394281B2 (ja) | 車載注意喚起システム、報知制御装置 | |
| JP2010239408A (ja) | 車載カメラの校正装置 | |
| JP5081313B2 (ja) | 車載カメラの校正装置 | |
| JP6759899B2 (ja) | 車両用画像処理装置 | |
| JP2006224873A (ja) | 車両周辺監視装置 | |
| US9994157B2 (en) | Periphery monitoring apparatus and periphery monitoring system | |
| JP6791108B2 (ja) | 顔位置検出装置 | |
| JP2014026564A (ja) | 車両用警告装置 | |
| JP6806107B2 (ja) | 障害物認識支援装置、障害物認識支援方法、プログラム | |
| JP2012176656A (ja) | 駐車支援装置 | |
| KR20160050439A (ko) | 차량용 후방 카메라의 영상 보정 방법 | |
| JP2018107573A (ja) | 車両用視認装置 | |
| JP4858516B2 (ja) | 顔向き検出装置 | |
| WO2019176037A1 (ja) | 危険警告システム及び危険警告方法 | |
| JP7001038B2 (ja) | 運転状態判定方法 | |
| JP6635056B2 (ja) | 車両用運転支援装置 | |
| JP2017068672A (ja) | 運転支援装置 | |
| US10373601B2 (en) | System and method for active noise compensation in motorcycles, and motorcycle having a system for active noise compensation | |
| WO2017217044A1 (ja) | 視認方向推定装置 | |
| JP4706917B2 (ja) | 運転者監視システム | |
| JP7633225B2 (ja) | 運転者監視装置および監視プログラム | |
| JP6995447B2 (ja) | キャリブレーション装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination | Free format text:JAPANESE INTERMEDIATE CODE: A621 Effective date:20201222 | |
| A977 | Report on retrieval | Free format text:JAPANESE INTERMEDIATE CODE: A971007 Effective date:20211111 | |
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 Effective date:20211124 | |
| A61 | First payment of annual fees (during grant procedure) | Free format text:JAPANESE INTERMEDIATE CODE: A61 Effective date:20211207 | |
| R150 | Certificate of patent or registration of utility model | Ref document number:7001038 Country of ref document:JP Free format text:JAPANESE INTERMEDIATE CODE: R150 |