JP6821735B2 - adapter - Google Patents
adapterDownload PDFInfo
- Publication number
- JP6821735B2 JP6821735B2JP2019063447AJP2019063447AJP6821735B2JP 6821735 B2JP6821735 B2JP 6821735B2JP 2019063447 AJP2019063447 AJP 2019063447AJP 2019063447 AJP2019063447 AJP 2019063447AJP 6821735 B2JP6821735 B2JP 6821735B2
- Authority
- JP
- Japan
- Prior art keywords
- surgical instrument
- adapter
- guide
- drive transmission
- mounting surface
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000005540biological transmissionEffects0.000claimsdescription61
- 239000000758substrateSubstances0.000claimsdescription32
- 210000000078clawAnatomy0.000claimsdescription21
- 238000002432robotic surgeryMethods0.000claimsdescription16
- 238000003780insertionMethods0.000claimsdescription15
- 230000037431insertionEffects0.000claimsdescription15
- 238000011144upstream manufacturingMethods0.000claimsdescription8
- 239000012636effectorSubstances0.000description11
- 230000033001locomotionEffects0.000description6
- 238000001356surgical procedureMethods0.000description6
- 230000015271coagulationEffects0.000description4
- 238000005345coagulationMethods0.000description4
- 238000010586diagramMethods0.000description3
- 230000006870functionEffects0.000description3
- 238000012986modificationMethods0.000description3
- 230000004048modificationEffects0.000description3
- 230000002093peripheral effectEffects0.000description3
- 230000036544postureEffects0.000description2
- 0*C1*C**C1Chemical compound*C1*C**C10.000description1
- 230000001112coagulating effectEffects0.000description1
- 230000003028elevating effectEffects0.000description1
- 238000002324minimally invasive surgeryMethods0.000description1
- 238000000465mouldingMethods0.000description1
- 244000052769pathogenSpecies0.000description1
- 239000011347resinSubstances0.000description1
- 229920005989resinPolymers0.000description1
- 230000004044responseEffects0.000description1
- 239000000126substanceSubstances0.000description1
- 210000000707wristAnatomy0.000description1
Images






















Description
Translated fromJapaneseこの発明は、アダプタに関し、特に、ロボット手術システムのロボットアームに手術器具を取り外し可能に接続するためのアダプタに関する。 The present invention relates to adapters, in particular to adapters for detachably connecting surgical instruments to the robot arm of a robotic surgery system.
従来、ロボット手術システムのロボットアームに手術器具を取り外し可能に接続するためのアダプタが知られている(たとえば、特許文献1参照)。 Conventionally, an adapter for detachably connecting a surgical instrument to a robot arm of a robotic surgery system has been known (see, for example, Patent Document 1).
上記特許文献1には、手術器具の側部に設けられた爪部に係合する保持部材と、ロボットアームの駆動力を手術器具に伝達する入力部とを備える、アダプタが開示されている。この特許文献1のアダプタでは、保持部材は、爪部を外側から覆うように形成されている。
しかしながら、特許文献1のアダプタでは、保持部材が、手術器具の側部に設けられた爪部を外側から覆うように形成されているため、アダプタを、手術器具のアダプタに取り付ける部分よりも幅広く形成する必要がある。このため、アダプタを小型化することが困難であるという問題点がある。 However, in the adapter of
この発明は、ロボット手術システムのロボットアームに手術器具を取り外し可能に接続するためのアダプタを小型化することに向けたものである。 The present invention is aimed at downsizing an adapter for detachably connecting a surgical instrument to a robot arm of a robotic surgery system.
この発明の第1の局面によるアダプタは、ロボット手術システムのロボットアームに手術器具を取り外し可能に接続するためのアダプタであって、ロボットアームに取り付けるための第1面と、手術器具の取付面が装着される第2面と、を含む基体と、基体に回転可能に設けられた複数の駆動伝達部材と、を備え、基体の第2面は、取付面に設けられた第1および第2の案内溝にそれぞれ対応する第1および第2のガイドレールを有し、第2面の第1および第2のガイドレールは、取付面の第1および第2の案内溝に挿入され、手術器具をスライドさせて複数の駆動伝達部材の各々と、取付面に設けられた複数の回転部材の各々とが対応するように手術器具を案内するように構成されており、第1および第2のガイドレールは、それぞれ、第1および第2の案内溝に設けられた係合穴に係合する爪部を有している。The adapter according tothe first aspect ofthe present invention is an adapter for detachably connecting a surgical instrument to a robot arm of a robotic surgery system, and has a first surface for attaching to the robot arm and a mounting surface for the surgical instrument. A substrate including a second surface to be mounted, and a plurality of drive transmission members rotatably provided on the substrate are provided, and the second surface of the substrate is a first and second surface provided on the mounting surface. It has first and second guide rails corresponding to the guide grooves, and the first and second guide rails on the second surface are inserted into the first and second guide grooves on the mounting surface to hold the surgical instrument.The first and second guide rails are configured to slide to guide the surgical instrument so that each of the plurality of drive transmission members and each of the plurality of rotating members provided on the mounting surface correspond to each other.Each has a claw portion that engages with an engaging hole provided in the first and second guide grooves .
この発明の第1の局面によるアダプタでは、上記のように構成することによって、手術器具の取付面の案内溝に対応するように、手術器具の取付面が装着される第2面に第1および第2のガイドレールを形成することができるので、平面視において、第1および第2のガイドレールを手術器具の取付面に対して内側に形成することができる。これにより、アダプタを手術器具の取付面以下の大きさに形成することができるので、ロボット手術システムのロボットアームに手術器具を取り外し可能に接続するためのアダプタを小型化することができる。
また、この発明の第2の局面によるアダプタは、ロボット手術システムのロボットアームに手術器具を取り外し可能に接続するためのアダプタであって、ロボットアームに取り付けるための第1面と、手術器具の取付面が装着される第2面と、を含む基体と、基体に回転可能に設けられた複数の駆動伝達部材と、を備え、基体の第2面は、取付面に設けられた第1および第2の案内溝にそれぞれ対応する第1および第2のガイドレールを有し、第2面の第1および第2のガイドレールは、取付面の第1および第2の案内溝に挿入され、手術器具をスライドさせて複数の駆動伝達部材の各々と、取付面に設けられた複数の回転部材の各々とが対応するように手術器具を案内するように構成されており、複数の駆動伝達部材は、それぞれ、取付面に設けられた対応する回転部材に係合する係合部を含み、係合部は、複数の駆動伝達部材のうちスライド挿入方向上流側に位置する第1駆動伝達部材に設けられた第1係合部と、複数の駆動伝達部材のうちスライド挿入方向下流側に位置する第2駆動伝達部材に設けられた第2係合部と、を有し、第1係合部は、手術器具をスライドさせてアダプタに取り付ける場合に、第2係合部に係合する回転部材が係合しない形状を有している。
また、この発明の第3の局面によるアダプタは、ロボット手術システムのロボットアームに手術器具を取り外し可能に接続するためのアダプタであって、ロボットアームに取り付けるための第1面と、手術器具の取付面が装着される第2面と、を含む基体と、基体に回転可能に設けられた複数の駆動伝達部材と、を備え、基体の第2面は、取付面に設けられた第1および第2の案内溝にそれぞれ対応する第1および第2のガイドレールを有し、第2面の第1および第2のガイドレールは、取付面の第1および第2の案内溝に挿入され、手術器具をスライドさせて複数の駆動伝達部材の各々と、取付面に設けられた複数の回転部材の各々とが対応するように手術器具を案内するように構成されており、第1および第2のガイドレールの延びる方向と平行な方向に沿って基体から突出するように形成され、第1および第2のガイドレールよりも先行して手術器具を案内する先行ガイド部をさらに備える。In the adapter according tothe first aspect ofthe present invention, by configuring as described above, the first and the second surface on which the mounting surface of the surgical instrument is mounted so as to correspond to the guide groove of the mounting surface of the surgical instrument. Since the second guide rail can be formed, the first and second guide rails can be formed inside the mounting surface of the surgical instrument in a plan view. As a result, the adapter can be formed to have a size smaller than the mounting surface of the surgical instrument, so that the adapter for detachably connecting the surgical instrument to the robot arm of the robotic surgery system can be miniaturized.
Further, the adapter according to the second aspect of the present invention is an adapter for detachably connecting a surgical instrument to the robot arm of a robotic surgery system, and has a first surface for attaching to the robot arm and attachment of the surgical instrument. A substrate including a second surface on which the surface is mounted and a plurality of drive transmission members rotatably provided on the substrate are provided, and the second surface of the substrate is a first and first surface provided on the mounting surface. It has first and second guide rails corresponding to the two guide grooves, respectively, and the first and second guide rails on the second surface are inserted into the first and second guide grooves on the mounting surface for surgery. It is configured to slide the instrument to guide the surgical instrument so that each of the plurality of drive transmission members and each of the plurality of rotating members provided on the mounting surface correspond to each other. Each includes an engaging portion that engages with a corresponding rotating member provided on the mounting surface, the engaging portion being provided on a first drive transmitting member located upstream of the plurality of drive transmitting members in the slide insertion direction. The first engaging portion is provided with a first engaging portion and a second engaging portion provided on the second drive transmitting member located on the downstream side in the slide insertion direction among the plurality of drive transmitting members, and the first engaging portion is provided. , The rotating member that engages with the second engaging portion does not engage when the surgical instrument is slid and attached to the adapter.
Further, the adapter according to the third aspect of the present invention is an adapter for detachably connecting a surgical instrument to the robot arm of a robotic surgery system, and has a first surface for attaching to the robot arm and attachment of the surgical instrument. A substrate including a second surface on which the surface is mounted and a plurality of drive transmission members rotatably provided on the substrate are provided, and the second surface of the substrate is a first and first surface provided on the mounting surface. It has first and second guide rails corresponding to the two guide grooves, respectively, and the first and second guide rails on the second surface are inserted into the first and second guide grooves on the mounting surface for surgery. It is configured to slide the instrument to guide the surgical instrument so that each of the plurality of drive transmission members and each of the plurality of rotating members provided on the mounting surface correspond to each other. It is further provided with a leading guide portion that is formed so as to project from the substrate along a direction parallel to the extending direction of the guide rail and guides the surgical instrument ahead of the first and second guide rails.
本発明によれば、ロボット手術システムのロボットアームに手術器具を取り外し可能に接続するためのアダプタを小型化することができる。 According to the present invention, an adapter for detachably connecting a surgical instrument to a robot arm of a robotic surgery system can be miniaturized.
以下、実施形態を図面に基づいて説明する。 Hereinafter, embodiments will be described with reference to the drawings.
[第1実施形態]
(ロボット手術システムの構成)
図1および図2を参照して、第1実施形態によるロボット手術システム100の構成について説明する。[First Embodiment]
(Structure of robotic surgery system)
The configuration of the
図1に示すように、ロボット手術システム100は、遠隔操作装置10と、患者側装置20と、を備えている。遠隔操作装置10は、患者側装置20に設けられた医療器具(medical equipment)を遠隔操作するために設けられている。患者側装置20によって実行されるべき動作態様指令が術者(surgeon)である操作者Oにより遠隔操作装置10に入力されると、遠隔操作装置10は、動作態様指令をコントローラ26を介して患者側装置20に送信する。そして、患者側装置20は、遠隔操作装置10から送信された動作態様指令に応答して、ロボットアーム21に取り付けられた手術器具(surgical instrument)40、内視鏡50等の医療器具を操作する。これにより、低侵襲手術が行われる。 As shown in FIG. 1, the
患者側装置20は、患者Pに対して手術を行うインターフェースを構成する。患者側装置20は、患者Pが横たわる手術台30の傍らに配置される。患者側装置20は、複数のロボットアーム21を有し、このうち1つのロボットアーム21(21b)に内視鏡50が取り付けられ、その他のロボットアーム21(21a)に手術器具40が取り付けられる。各ロボットアーム21は、プラットホーム23に共通に支持されている。複数のロボットアーム21は複数の関節を有し、それぞれの関節には、サーボモータを含む駆動部と、エンコーダ等の位置検出器とが設けられている。ロボットアーム21は、コントローラ26を介して与えられた駆動信号によりロボットアーム21に取り付けられた医療器具が所望の動作を行うように制御されるように構成されている。 The patient-
プラットホーム23は、手術室の床の上に載置されたポジショナ22に支持されている。ポジショナ22は、鉛直方向に調整可能な昇降軸を有する柱部24が、車輪を備え床面を移動可能なベース25に連結されている。 The
ロボットアーム21aには、先端部に医療器具としての手術器具40が着脱可能に取り付けられる。手術器具40は、ロボットアーム21aに取り付けられるハウジング43(図4参照)と、細長形状のシャフト42(図4参照)と、シャフト42の先端部に設けられたエンドエフェクタ41(図4参照)とを備えている。エンドエフェクタ41として、例えば、把持鉗子、シザーズ、フック、高周波ナイフ、スネアワイヤ、クランプ、ステイプラーが挙げられるがこれに限られるものではなく、各種の処置具を適用することができる。患者側装置20を用いた手術において、ロボットアーム21aは、患者Pの体表に留置したカニューラ(トロッカ)を介して患者Pの体内に手術器具40を導入する。そして、手術器具40のエンドエフェクタ41は、手術部位の近傍に配置される。 A
ロボットアーム21bには、先端部に医療器具としての内視鏡50が着脱可能に取り付けられる。内視鏡50は、患者Pの体腔内を撮影するものであり、撮影した画像は、遠隔操作装置10に対して出力される。内視鏡50として、3次元画像を撮影することができる3D内視鏡若しくは2D内視鏡が用いられる。患者側装置20を用いた手術において、ロボットアーム21bは、患者Pに体表に留置したトロッカを介して患者Pの体内に内視鏡50を導入する。そして、内視鏡50が手術部位の近傍に配置される。 An
遠隔操作装置10は、操作者Oとのインターフェースを構成する。遠隔操作装置10は、ロボットアーム21に取り付けられた医療器具を操作者Oが操作するための装置である。すなわち、遠隔操作装置10は、操作者Oによって入力された手術器具40および内視鏡50によって実行されるべき動作態様指令をコントローラ26を介して患者側装置20へ送信可能に構成されている。遠隔操作装置10は、たとえば、マスタの操作をしながらも患者Pの様子がよく見えるように手術台30の傍らに設置される。なお、遠隔操作装置10は、例えば動作態様指令を無線で送信するようにし、手術台30が設置された手術室とは別室に設置することも可能である。 The remote control device 10 constitutes an interface with the operator O. The remote control device 10 is a device for the operator O to operate the medical device attached to the
手術器具40によって実行されるべき動作態様とは、手術器具40の動作(一連の位置及び姿勢)及び手術器具40個別の機能によって実現される動作の態様である。たとえば、手術器具40が把持鉗子である場合には、手術器具40によって実行されるべき動作態様とは、エンドエフェクタ41の手首のロール回転位置及びピッチ回転位置と、ジョーの開閉を行う動作である。また、手術器具40が高周波ナイフである場合には、手術器具40によって実行されるべき動作態様とは、高周波ナイフの振動動作、具体的には高周波ナイフに対する電流の供給であり得る。また、手術器具40がスネアワイヤである場合には、手術器具40によって実行されるべき動作態様とは、束縛動作および束縛状態の解放動作であり得る。また、バイポーラやモノポーラに電流を供給することによって手術対象部位を焼き切る動作であり得る。 The motion mode to be performed by the
内視鏡50によって実行されるべき動作態様とは、たとえば、内視鏡50先端の位置及び姿勢、又はズーム倍率の設定である。 The operation mode to be executed by the
遠隔操作装置10は、図1および図2に示すように、操作ハンドル11と、操作ペダル部12と、表示部13と、制御装置14と、を備えている。 As shown in FIGS. 1 and 2, the remote control device 10 includes an
操作ハンドル11は、ロボットアーム21に取り付けられた医療器具を遠隔で操作するために設けられている。具体的には、操作ハンドル11は、医療器具(手術器具40、内視鏡50)を操作するための操作者Oによる操作を受け付ける。操作ハンドル11は、水平方向に沿って2つ設けられている。つまり、2つの操作ハンドル11のうち一方の操作ハンドル11は、操作者Oの右手により操作され、2つの操作ハンドル11のうち他方の操作ハンドル11は、操作者Oの左手により操作される。 The operation handle 11 is provided for remotely operating the medical device attached to the
また、操作ハンドル11は、遠隔操作装置10の後方側から、前方側に向かって延びるように配置されている。操作ハンドル11は、所定の3次元の操作領域内で動かすことができるように構成されている。すなわち、操作ハンドル11は、上下方向、左右方向、および前後方向に動かすことができるように構成されている。 Further, the operation handle 11 is arranged so as to extend from the rear side of the remote control device 10 toward the front side. The operation handle 11 is configured to be movable within a predetermined three-dimensional operation area. That is, the operation handle 11 is configured to be movable in the vertical direction, the horizontal direction, and the front-rear direction.
遠隔操作装置10と患者側装置20とは、ロボットアーム21aおよびロボットアーム21bの動作の制御においては、マスタスレーブ型のシステムを構成する。すなわち、操作ハンドル11は、マスタスレーブ型のシステムにおけるマスタ側の操作部を構成し、医療器具が取り付けられたロボットアーム21aおよびロボットアーム21bはスレーブ側の動作部を構成する。そして、操作ハンドル11を操作者Oが操作すると、操作ハンドル11の動きをロボットアーム21aの先端部(手術器具40のエンドエフェクタ41)またはロボットアーム21bの先端部(内視鏡50)がトレースして移動するようにロボットアーム21aまたはロボットアーム21bの動作が制御される。 The remote control device 10 and the
また、患者側装置20は、設定された動作倍率に応じてロボットアーム21aの動作を制御するよう構成されている。たとえば、動作倍率が1/2倍に設定されている場合、手術器具40のエンドエフェクタ41は、操作ハンドル11の移動距離の1/2の移動距離を移動するよう制御される。これによって、精細な手術を精確に行うことができる。 Further, the patient-
操作ペダル部12は、医療器具に関する機能を実行するための複数のペダルを含んでいる。複数のペダルは、凝固ペダルと、切断ペダルと、カメラペダルと、クラッチペダルと、を含んでいる。また、複数のペダルは、操作者Oの足により操作される。 The operating
凝固ペダルは、手術器具40を用いて手術部位を凝固させる操作を行うことができる。具体的には、凝固ペダルは、操作されることにより、手術器具40に凝固用の電圧が印加されて、手術部位の凝固が行われる。切断ペダルは、手術器具40を用いて手術部位を切断させる操作を行うことができる。具体的には、切断ペダルは、操作されることにより、手術器具40に切断用の電圧が印加されて、手術部位の切断が行われる。 The coagulation pedal can perform an operation of coagulating the surgical site using the
カメラペダルは、体腔内を撮像する内視鏡50の位置及び姿勢を操作するために用いられる。具体的には、カメラペダルは、内視鏡50の操作ハンドル11による操作を有効にする。つまり、カメラペダルが押されている間は、操作ハンドル11により内視鏡50の位置および姿勢を操作することが可能である。たとえば、内視鏡50は、左右の操作ハンドル11の両方を用いることにより操作される。具体的には、左右の操作ハンドル11の中間点を中心に左右の操作ハンドル11を回動させることにより、内視鏡50が回動される。また、左右の操作ハンドル11を共に押し込むことにより、内視鏡50が奥に進む。また、左右の操作ハンドル11を共に引っ張ることにより、内視鏡50が手前に戻る。また、左右の操作ハンドル11を共に上下左右に移動させることにより、内視鏡50が上下左右に移動する。 The camera pedal is used to control the position and posture of the
クラッチペダルは、ロボットアーム21と、操作ハンドル11との操作接続を一時切断し手術器具40の動作を停止させる場合に用いられる。具体的には、クラッチペダルが操作されている間は、操作ハンドル11を操作しても、患者側装置20のロボットアーム21が動作しない。たとえば、操作により操作ハンドル11が移動可能な範囲の端部近傍に来た場合に、クラッチペダルが操作されることにより、操作接続を一時切断して、操作ハンドル11を中央位置付近に戻すことができる。そして、クラッチペダルの操作を中止するとロボットアーム21と操作ハンドル11とが再び接続され、中央付近で操作ハンドル11の操作を再開することができる。 The clutch pedal is used when the operation connection between the
表示部13は、内視鏡50が撮像した画像を表示することができるものである。表示部13は、スコープ型表示部または非スコープ型表示部からなる。スコープ型表示部とは、たとえば、覗き込むタイプの表示部である。また、非スコープ型表示部とは、通常のパーソナルコンピュータのディスプレイのような覗き込むタイプではない平坦な画面を有する開放型の表示部を含む概念である。 The
スコープ型表示部が取り付けられた場合、患者側装置20のロボットアーム21bに取り付けられた内視鏡50により撮像された3D画像が表示される。非スコープ型表示部が取り付けられた場合にも、患者側装置20に設けられた内視鏡50により撮像された3D画像が表示される。なお、非スコープ型表示部が取り付けられた場合、患者側装置20に設けられた内視鏡50により撮像された2D画像が表示されてもよい。 When the scope type display unit is attached, the 3D image captured by the
図2に示すように、制御装置14は、例えば、CPU等の演算器を有する制御部141と、ROMおよびRAM等のメモリを有する記憶部142と、画像制御部143とを含んでいる。制御装置14は、集中制御する単独の制御装置により構成されていてもよく、互いに協働して分散制御する複数の制御装置により構成されてもよい。制御部141は、操作ハンドル11により入力された動作態様指令を、操作ペダル部12の切替状態に応じて、ロボットアーム21aによって実行されるべき動作態様指令であるか、または、内視鏡50によって実行されるべき動作態様指令であるかを判定する。そして、制御部141は、操作ハンドル11に入力された動作態様指令が手術器具40によって実行されるべき動作態様指令であると判断すると、動作態様指令をロボットアーム21aに対して送信する。これによって、ロボットアーム21aが駆動され、この駆動によってロボットアーム21aに取り付けられた手術器具40の動作が制御される。 As shown in FIG. 2, the
また、制御部141は、操作ハンドル11に入力された動作態様指令が内視鏡50によって実行されるべき動作態様指令であると判定すると、当該動作態様指令をロボットアーム21bに対して送信する。これによって、ロボットアーム21bが駆動され、この駆動によってロボットアーム21bに取り付けられた内視鏡50の動作が制御される。 Further, when the control unit 141 determines that the operation mode command input to the operation handle 11 is an operation mode command to be executed by the
記憶部142には例えば手術器具40の種類に応じた制御プログラムが記憶されていて、取り付けられた手術器具40の種類に応じて制御部141がこれらの制御プログラムを読み出すことにより、遠隔操作装置10の操作ハンドル11及び/又は操作ペダル部12の動作指令が個別の手術器具40に適合した動作をさせることができる。 For example, the
画像制御部143は、内視鏡50が取得した画像を表示部13に伝送する。画像制御部143は、必要に応じて画像の加工修正処理を行う。 The
(アダプタおよび手術器具の構成)
図3〜図11を参照して、第1実施形態によるアダプタ60および手術器具40の構成について説明する。(Structure of adapter and surgical instruments)
The configuration of the
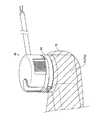
図3に示すように、ロボットアーム21は、清潔区域において使用されるため、ドレープ70により覆われる。ここで、手術室では、手術により切開した部分および医療機器が病原菌や異物などにより汚染されることを防ぐため、清潔操作が行われる。この清潔操作においては、清潔区域および清潔区域以外の区域である汚染区域が設定される。手術部位は、清潔区域に配置される。操作者Oを含む手術チームのメンバーは、手術中、清潔区域に殺菌されている物体のみが位置するよう配慮し、かつ、汚染区域に位置している物体を清潔区域に移動させるときは、この物体に滅菌処理を施す。同様に、操作者Oを含む手術チームのメンバーがその手を汚染区域に位置させたときは、清潔区域に位置している物体に直接接触する前に、手の滅菌処理を行う。清潔区域において用いられる器具は、滅菌処理が行われる、または、滅菌処理されたドレープ70により覆われる。 As shown in FIG. 3, the
ドレープ70は、ロボットアーム21と、手術器具40との間に配置される。具体的には、ドレープ70は、アダプタ60と、ロボットアーム21との間に配置される。アダプタ60は、ドレープ70を挟み込むようにして、ロボットアーム21に取り付けられる。つまり、アダプタ60は、ロボットアーム21aとの間にドレープ70を挟み込むためのドレープアダプタである。また、アダプタ60には、手術器具40が取り付けられる。ロボットアーム21は、手術器具40のエンドエフェクタ41を駆動させるために、アダプタ60を介して手術器具40に動力を伝達する。 The
図4に示すように、アダプタ60は、基体61と、複数の駆動伝達部材62と、ガイドレール63と、先行ガイドレール64と、第1電極アレイ65と、アーム係合部66と、を備えている。また、図5に示すように、アダプタ60は、複数のアーム係合穴部67と、複数の位置決孔68とを備えている。駆動伝達部材62は、図4に示すように、Y2方向側に配置された複数の第1駆動伝達部材62aと、Y1方向側に配置された複数の第2駆動伝達部材62bとを含んでいる。また、アダプタ60は、Z2方向側に配置された第1面60aがロボットアーム21aに取り付けられる。また、アダプタ60は、Z1方向側に配置された第2面60bに手術器具40が取り付けられる。 As shown in FIG. 4, the
図5に示すように、手術器具40のハウジング43のZ2方向側に配置された取付面40aがアダプタ60に取り付けられる。また、手術器具40は、複数の回転部材44と、2つの案内溝45(第1の案内溝45aおよび第2の案内溝45b)と、2つの可動部材46と、先行案内溝47と、第2電極アレイ48とを備えている。回転部材44は、Y2方向側に配置された複数の第1回転部材44aと、Y1方向側に配置された複数の第2回転部材44bとを含んでいる。可動部材46は、ボタン461に接続されている。 As shown in FIG. 5, a mounting
図4に示すように、ドレープ70は、本体部71と、取付部72とを備えている。本体部71は、フィルム状に形成されている。取付部72は、樹脂成型により形成されている。取付部72は、ロボットアーム21aおよびアダプタ60が係合する部分に貫通口が設けられている。貫通口は、係合する部分ごとに対応するように設けられていてもよい。また、貫通口は、複数の係合する部分に対応するように設けられていてもよい。 As shown in FIG. 4, the
ロボットアーム21のアダプタ取付面211には、アダプタ60が取り付けられる。また、ロボットアーム21は、回転駆動部212と、係合部213と、ボス214とを備えている。 The
図5に示すように、手術器具40の複数の回転部材44は、回転駆動されることにより、エンドエフェクタ41を駆動させる。具体的には、回転部材44とエンドエフェクタ41とは、シャフト42内に通されたワイヤにより接続されている。そして、回転部材44が回転されることにより、ワイヤが引っ張られてエンドエフェクタ41が駆動される。また、回転部材44は、ハウジング43内において、シャフト42とギアにより接続されている。そして、回転部材44が回転されることにより、シャフト42が回転される。 As shown in FIG. 5, the plurality of rotating
たとえば、回転部材44は、4つ設けられている。1つの回転部材44の回転により、シャフト42が回転される。また、他の3つの回転部材44の回転により、エンドエフェクタ41が駆動される。4つの回転部材44は、X方向に2つ配列され、Y方向に2つ配列されている。 For example, four
案内溝45は、Y方向に沿って延びるように設けられている。また、案内溝45は、X方向に対向するように2つ設けられている。2つの案内溝45は、略平行に設けられている。2つの案内溝45は、アダプタ60の2つのガイドレール63が挿入されてアダプタ60への取り付けを案内する。案内溝45は、可動部材46がX方向に移動することにより、幅が変化する。つまり、可動部材46が内側に移動することにより、案内溝45の幅が拡張される。また、可動部材46が外側に移動することにより、案内溝45の幅が縮小される。可動部材46は、案内溝45の幅を狭める方向(外側方向)に向けて付勢されている。具体的には、可動部材46は、バネにより付勢されている。可動部材46は、ボタン461を作業者が押すことにより、案内溝45の幅を広げる方向(内側方向)に移動する。 The
先行案内溝47は、Y方向に沿って延びるように設けられている。また、先行案内溝47は、2つの案内溝45(第1の案内溝45aおよび第2の案内溝45b)の間に設けられている。また、先行案内溝47は、案内溝45と略平行に延びるように形成されている。また、先行案内溝47は、X方向における取付面40aの略中央に設けられている。 The leading
第2電極アレイ48は、アダプタ60の第1電極アレイ65を介してロボットアーム21に接続される。また、第2電極アレイ48は、ハウジング43内に設けられた基板に接続されている。つまり、手術器具40をアダプタ60を介してロボットアーム21に取り付けることにより、手術器具40の基板と、ロボットアーム21とが接続される。ハウジング43内の基板は、手術器具40の種類や手術器具40の使用回数を管理するためなどに用いられる。 The
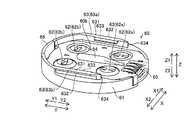
図4〜図6に示すように、アダプタ60は、ロボット手術システム100のロボットアーム21aに手術器具40を取り外し可能に接続するために設けられている。基体61は、ロボットアーム21aに取り付けるための第1面60aと、手術器具40の取付面40aが装着される第2面60bと、を含んでいる。アダプタ60は、Z方向にみて、手術器具40のハウジング43と略同じ大きさを有している。具体的には、アダプタ60は、Z方向にみて、ハウジング43と略同じ直径を有する略円形状に形成されている。 As shown in FIGS. 4 to 6, the
駆動伝達部材62は、基体61に回転可能に設けられている。具体的には、駆動伝達部材62は、Z方向に延びる回転軸線を中心に回転可能に設けられている。駆動伝達部材62は、ロボットアーム21aの回転駆動部212の駆動力を、手術器具40の回転部材44に伝達する。駆動伝達部材62は、手術器具40の回転部材44に対応するように複数設けられている。また、複数の駆動伝達部材62は、手術器具40の回転部材44に対応する位置に各々配置されている。 The
ガイドレール63は、第2面60bに設けられている。また、ガイドレール63は、Y方向に沿って延びるように設けられている。また、ガイドレール63は、X方向に対向するように2つ設けられている。2つのガイドレール63(第1のガイドレール63aおよび第2のガイドレール63b)は、略平行に設けられている。また、第1のガイドレール63aおよび第2のガイドレール63bは、手術器具40の取付面40aに略平行に設けられた第1の案内溝45aおよび第2の案内溝45bにそれぞれ対応するように設けられている。第2面60bの第1のガイドレール63aおよび第2のガイドレール63bは、第1のガイドレール63aおよび第2のガイドレール63bのそれぞれの一端634(Y2方向側の端部)と、取付面40aの第1の案内溝45aおよび第2の案内溝45bのそれぞれの一端452(Y1方向側の端部)とを対応させてスライドさせることにより、複数の駆動伝達部材62の各々と、取付面40aに設けられた複数の回転部材44の各々とが対応するように手術器具40を案内するように構成されている。 The
これにより、手術器具40の取付面40aの案内溝45に対応するように、手術器具40の取付面40aが装着される第2面60bに第1のガイドレール63aおよび第2のガイドレール63bを形成することができるので、平面視において(Z方向に見て)、第1のガイドレール63aおよび第2のガイドレール63bを手術器具40の取付面40aに対して内側に形成することができる。その結果、アダプタ60を手術器具40の取付面40a以下の大きさに形成することができるので、ロボット手術システム100のロボットアーム21aに手術器具40を取り外し可能に接続するためのアダプタ60を小型化することができる。 As a result, the
また、第2面60bの第1のガイドレール63aおよび第2のガイドレール63bは、第2部材622の第1部材621に対する移動方向(Z方向)と交差する方向(Y方向)に、手術器具40の第1の案内溝45aおよび第2の案内溝45bを案内するように構成されている。つまり、アダプタ60に対する手術器具40のスライド挿入方向は、手術器具40のシャフト42が延びる方向と略平行である。これにより、スライド挿入方向がシャフト42の延びる方向と交差する場合と異なり、アダプタ60に対して手術器具40をスライドして脱着する場合に、シャフト42を移動させるために必要なスペースを、シャフト42の延びる方向のみに設ければよい。つまり、シャフト42の延びる方向と交差する方向にシャフト42を移動させるためのスペースを大きくとる必要がない。 Further, the
先行ガイドレール64は、第2面60bに設けられている。また、先行ガイドレール64は、Y方向に沿って延びるように設けられている。また、先行ガイドレール64は、第1のガイドレール63aおよび第2のガイドレール63bの間に設けられている。また、先行ガイドレール64は、第1のガイドレール63aおよび第2のガイドレール63bと略平行に延びるように形成されている。また、先行ガイドレール64は、X方向における第2面60bの略中央に設けられている。また、先行ガイドレール64は、取付面40aに設けられた先行案内溝47に対応して設けられている。つまり、先行ガイドレール64は、第1のガイドレール63aおよび第2のガイドレール63bよりも先行して手術器具40を案内する。これにより、第1のガイドレール63aおよび第2のガイドレール63bの間に設けられた先行ガイドレール64の案内により、第1のガイドレール63aおよび第2のガイドレール63bを第1の案内溝45aおよび第2の案内溝45bに容易に導くことができるので、手術器具40をアダプタ60に容易に取り付けることができる。 The leading
また、先行ガイドレール64は、アダプタ60に対する手術器具40のスライド挿入方向上流側(Y2方向側)が先細り形状に形成されている。具体的には、先行ガイドレール64は、Y2方向側の端部がX方向の幅が先細る形状に形成されている。また、先行ガイドレール64は、Y2方向側の端部がZ方向の高さが先細る形状に形成されている。これにより、先細り形状の部分により先行ガイドレール64を先行案内溝47に容易に導くことができる。 Further, the leading
第1電極アレイ65は、手術器具40の第2電極アレイ48とロボットアーム21とに接続される。第1電極アレイ65は、図8に示すように、複数の電極651と、溝652とを含んでいる。電極651は、基体61を貫通するようにZ方向に延びるように配置されている。溝652は、第2面60bに設けられている。また、溝652は、手術器具40の取付面40aの第2電極アレイ48に設けられた突出部482(図11参照)を受け入れる。つまり、アダプタ60に手術器具40が取り付けられた場合に、溝652に突出部482が嵌り込む。これにより、手術器具40がアダプタ60から取り外されている状態においても、突出部482および溝652により、作業者が第1電極アレイ65および第2電極アレイ48に触れることを防止することができる。また、手術器具40をアダプタ60に取り付ける場合に、突出部482を溝652により受け入れて、第1電極アレイ65と第2電極アレイ48とを接続することができる。 The
アーム係合部66は、ロボットアーム21の係合部213に係合する。具体的には、アーム係合部66は、第1面60aに設けられたアーム係合穴部67に挿入された係合部213と係合する。また、アーム係合部66は、Y方向に移動可能である。アーム係合部66は、付勢部材によりY1方向に付勢されている。アーム係合部66は、Y1方向に移動されることにより、係合部213と係合する。一方アーム係合部66は、Y2方向に移動されることにより、係合部213との係合が解除される。 The
アーム係合穴部67は、複数設けられている。つまり、アダプタ60は、複数個所の係合により、ロボットアーム21に固定される。アーム係合穴部67は、たとえば、5つ設けられている。また、複数のアーム係合穴部67は、第1面60aの周方向に沿って、均等に設けられている。 A plurality of
位置決孔68は、第1面60aに設けられている。位置決孔68は、ロボットアーム21のボス214が嵌り込む。位置決孔68は、複数設けられている。位置決孔68は、第1面60aのY1方向側の端部近傍に設けられている。 The
図7に示すように、駆動伝達部材62は、第1部材621と、付勢部材623を介して第1部材621に対して移動可能に設けられた第2部材622と、を含んでいる。第1部材621は、第2部材622が嵌り込む凹部621aと、第2部材622に係合する係合部621bとを有している。第2部材622は、付勢部材623が収容される凹部622aと、第1部材621に係合する係合部622bとを有している。第1部材621と、第2部材622とは、付勢部材623を間に挟んだ状態でZ方向に篏合している。第1部材621は、第2面60b側(Z1方向側)に配置されている。第2部材622は、第1面60a側(Z2方向側)に配置されている。付勢部材623は、第1部材621を第2部材622に対してZ1方向側に付勢している。付勢部材623は、たとえば、バネにより構成されている。 As shown in FIG. 7, the
第2部材622は、Z方向において、第1面60aと面一に配置されている。また、第2部材622は、Z方向において、基体61に対して移動されないように配置されている。第1部材621は、Z方向において、基体61に対して移動可能に配置されている。これにより、手術器具40を第1のガイドレール63aおよび第2のガイドレール63bに沿って案内してアダプタ60に取り付ける場合に、手術器具40の移動の妨げにならないように駆動伝達部材62の第1部材621をZ方向にくぼむように移動させることができる。 The
また、第1部材621は、第2部材622がZ方向の回転軸線を中心に回転することに伴って、回転されるように構成されている。具体的には、第1部材621の内周部に設けられた係合部621bと、第2部材622の外周部に設けられた係合部622bとが、係合するように構成されている。第1部材621の係合部621bは、凹部621aから内側に突出するように形成されている。第2部材622の係合部622bは、第2部材622の外周部から内側に凹むように形成されている。第1部材621の係合部621bと、第2部材622の係合部622bとは、第1部材621が第2部材622に対してZ方向に移動したとしても、互いに係合するように構成されている。つまり、第2部材622に対する第1部材621のZ方向における位置に関わらず、第1部材621は、第2部材622とともに回転されるように構成されている。これにより、第2部材622がロボットアーム21の回転駆動部212の回転により回転されると、第1部材621も回転される。その結果、第1部材621に係合する手術器具40の回転部材44に、ロボットアーム21の回転駆動部212の回転が伝達される。 Further, the
図8および図9に示すように、ガイドレール63は、レール部631と、張出部632と、爪部633とを含んでいる。レール部631は、Y方向に延びるように形成されている。レール部631は、手術器具40の案内溝45に入り込んで、アダプタ60に対する手術器具40の移動をガイドする。 As shown in FIGS. 8 and 9, the
張出部632は、レール部631からX方向に張り出すように形成されている。具体的には、第1のガイドレール63aおよび第2のガイドレール63bのうち、X1方向側のガイドレール63の張出部632は、レール部631に対してX1方向側に配置されている。また、第1のガイドレール63aおよび第2のガイドレール63bのうち、X2方向側のガイドレール63の張出部632は、レール部631に対してX2方向側に配置されている。 The overhanging
爪部633は、レール部631からX方向に張り出すように形成されている。具体的には、第1のガイドレール63aおよび第2のガイドレール63bのうち、X1方向側のガイドレール63の爪部633は、レール部631に対してX2方向側に配置されている。また、第1のガイドレール63aおよび第2のガイドレール63bのうち、X2方向側のガイドレール63の爪部633は、レール部631に対してX1方向側に配置されている。つまり、張出部632は、レール部631に対して、爪部633の反対側に設けられている。張出部632は、レール部631に対してX方向における外側に配置されている。爪部633は、レール部631に対してX方向における内側に配置されている。 The
張出部632は、手術器具40の案内溝45に設けられた係合溝451(図10および図11参照)に係合する。これにより、張出部632が係合溝451に係合されることによって、アダプタ60に対して手術器具40をより安定して固定することができる。つまり、張出部632が係合溝451に係合することにより、アダプタ60に対して手術器具40がZ方向に抜けないように接続される。 The overhanging
爪部633は、手術器具40の案内溝45に設けられた係合穴462(図10および図11参照)に係合する。具体的には、爪部633は、案内溝45を形成する可動部材46の側壁に設けられた係合穴462に係合する。これにより、爪部633が係合穴462に係合されることによって、ガイドレール63により案内した手術器具40をアダプタ60に対して位置決めして固定することができる。つまり、爪部633が係合穴462に係合することにより、手術器具40がアダプタ60に対してY方向に位置決めされるとともに、アダプタ60に対して手術器具40がY方向に抜けないように固定(ロック)される。また、爪部633は、図9に示すように、X方向に沿って傾斜するように形成されている。 The
図8に示すように、複数の駆動伝達部材62は、それぞれ、手術器具40の取付面40aに設けられた対応する回転部材44に係合する係合部624を含んでいる。係合部624は、複数の駆動伝達部材62のうちスライド挿入方向上流側(Y2方向側)に位置する第1駆動伝達部材62aに設けられた第1係合部624aと、複数の駆動伝達部材62のうちスライド挿入方向下流側(Y1方向側)に位置する第2駆動伝達部材62bに設けられた第2係合部624bとを含んでいる。第1係合部624aと、第2係合部624bとは、互いに異なる形状を有している。これにより、アダプタ60に対する手術器具40のスライドの途中で、第1駆動伝達部材62aと第2駆動伝達部材62bに対応する回転部材44とが互いに係合して引っかかるのを抑制することができるので、アダプタ60に対して手術器具40をスムーズに取り付けることができる。 As shown in FIG. 8, each of the plurality of
つまり、第1係合部624aは、第2係合部624bに係合する回転部材44が係合しない形状を有している。これにより、アダプタ60に対する手術器具40のスライドの途中で、第1駆動伝達部材62aと第2駆動伝達部材62bに対応する回転部材44とが互いに係合して引っかかるのをより確実に抑制することができる。 That is, the first engaging
具体的には、第1駆動伝達部材62aの第2面60b側には、第1係合部624aとして、第1凹部625および第2凹部626が独立して形成されている。また、第2駆動伝達部材62bの第2面60b側には、第2係合部624bとして、第1凹部625および第2凹部626が第3凹部627によりつながった形状の1つの凹部が形成されている。図10に示すように、手術器具40の取付面40aに設けられた複数の回転部材44のうち第1駆動伝達部材62aに係合する第1回転部材44aには、第1凹部625および第2凹部626に挿入される第1突起部441および第2突起部442を有している。つまり、第1凹部625には、第1突起部441が係合する。また、第2凹部626には、第2突起部442が係合する。 Specifically, a
手術器具40の取付面40aに設けられた複数の回転部材44のうち第2駆動伝達部材62bに係合する第2回転部材44bは、1つの凹部に挿入される第1突起部441と、第2突起部442と、第1突起部441および第2突起部442の間に配置された第3突起部443と、を有している。つまり、第1凹部625には、第1突起部441が係合する。また、第2凹部626には、第2突起部442が係合する。また、第3凹部627には、第3突起部443が係合する。これにより、第1凹部625および第2凹部626を独立して設けるか、第1凹部625および第2凹部626をつなげて1つの凹部にするかにより、第1係合部624aおよび第2係合部624bの形状を容易に互いに異なるように形成することができる。また、第1突起部441および第2突起部442を構成する部品を共通にして、第3突起部443の有無により、第1回転部材44aおよび第2回転部材44bの係合部分を互いに異なる形状に形成することができるので、部品の種類が増加するのを抑制することができる。 Of the plurality of rotating
図10および図11に示すように、手術器具40の取付面40aの案内溝45には、係合溝451が設けられている。係合溝451は、案内溝45に沿って、Y方向に延びるように形成されている。係合溝451には、アダプタ60の第2面60bに設けられたガイドレール63の張出部632が係合する。 As shown in FIGS. 10 and 11, the
案内溝45を形成する可動部材46の側壁には、係合穴462が設けられている。係合穴462には、アダプタ60の第2面60bに設けられたガイドレール63の爪部633が係合する。また、可動部材46を、X方向における内側方向に移動させることにより、爪部633の係合穴462への係合が解除される。また、可動部材46を、X方向における内側方向に移動させることにより、駆動伝達部材62がZ2方向に押されて、駆動伝達部材62と、回転部材44との係合が解除される。この状態で、手術器具40をアダプタ60に対してY2方向にスライドさせることにより、手術器具40をアダプタ60から取り外すことができる。 An
手術器具40の取付面40aの第2電極アレイ48は、複数の電極481と、突出部482とを含んでいる。複数の電極481は、それぞれ、アダプタ60の第1電極アレイ65の複数の電極651と接続される。突出部482は、各々の電極481に対してX方向の両側に配置されている。突出部482は、電極481に手などが触れるのを防止するために設けられている。具体的には、電極481を挟み込む突出部482の間隔は、指の大きさよりも十分に小さい。また、突出部482は、Z方向において、電極481よりも大きく突出している。 The
(ロボットアームへの手術器具の取り付け)
図12〜図14を参照して、第1実施形態によるロボットアーム21aへの手術器具40の取り付けについて説明する。(Attachment of surgical instruments to the robot arm)
The attachment of the
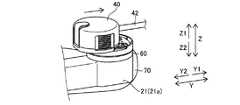
図12に示すように、ロボットアーム21aをドレープ70で覆った状態で、ロボットアーム21aにアダプタ60を取り付ける。アダプタ60は、ロボットアーム21aに対してZ方向に移動させて、ロボットアーム21aに取り付けられる。図13および図14に示すように、ロボットアーム21aに取り付けられたアダプタ60に対して手術器具40を取り付ける。手術器具40は、アダプタ60の先行ガイドレール64および第1のガイドレール63aおよび第2のガイドレール63bに沿ってY方向に移動させて、アダプタ60に取り付けられる。これにより、手術器具40がアダプタ60を介してロボットアーム21aに取り付けられる。 As shown in FIG. 12, the
手術器具40をロボットアーム21aから取り外す場合は、手術器具40の可動部材46のボタン461を押しながら、手術器具40をY2方向にスライド移動させることにより、手術器具40がアダプタ60から外される。 When the
[第2実施形態]
次に、図15〜図26を参照して、本発明の第2実施形態について説明する。この第2実施形態では、第1実施形態のアダプタに先行ガイド部をさらに設けらた構成の例について説明する。[Second Embodiment]
Next, a second embodiment of the present invention will be described with reference to FIGS. 15 to 26. In this second embodiment, an example of a configuration in which the adapter of the first embodiment is further provided with a leading guide portion will be described.
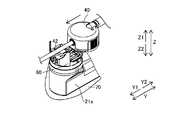
ここで、第2実施形態のアダプタ60は、図15および図16に示すように、先行ガイド部69が設けられている。先行ガイド部69は、第1のガイドレール63aおよび第2のガイドレール63bの延びる方向と平行な方向(Y方向)に沿って基体61から突出するように形成されている。また、先行ガイド部69は、第1のガイドレール63aおよび第2のガイドレール63bよりも先行して手術器具40を案内する。これにより、基体61から突出するように設けられた先行ガイド部69の案内により、第1のガイドレール63aおよび第2のガイドレール63bを第1の案内溝45aおよび第2の案内溝45bに容易に導くことができるので、手術器具40をアダプタ60に容易に取り付けることができる。また、基体31から突出するように先行ガイド部69を設けることにより、アダプタ60に対する手術器具40の取り付け方向および取付位置を容易に認識することができる。 Here, the
また、先行ガイド部69は、手術器具40の取付面40aから第2面60b側に突出する突出部49を第1のガイドレール63aおよび第2のガイドレール63bの延びる方向(Y方向)にガイドするように構成されている。これにより、手術器具40の取付面40aに設けられた突出部49を先行ガイド部69に沿ってスライドさせることにより、手術器具40をアダプタ60の取り付け位置に容易に導くことができる。 Further, the leading
手術器具40の突出部49は、図15に示すように、取付面40aのY2方向の端部近傍に一対設けられている。また、一対の突出部49は、X方向に所定の間隔を隔てて配置されている。また、一対の突出部49は、第2電極アレイ48を挟み込むように配置されている。 As shown in FIG. 15, a pair of protruding
また、基体61の第2面60bは、取付面40aの突出部49が係合する取付係合部611を有している。これにより、取付係合部611に係合する突出部49を先行ガイド部69により案内することができるので、案内するための部材を手術器具に別途設ける必要がない。具体的には、取付係合部611は、図16に示すように、基体61の第2面60bのY2方向の端部近傍に一対設けられている。また、一対の取付係合部611は、X方向に所定の間隔を隔てて配置されている。また、一対の取付係合部611は、第1電極アレイ65を挟み込むように配置されている。 Further, the
図24〜図26に示すように、側面視において、取付係合部611は、Y方向に凹む凹部を有している。また、側面視において、突出部49は、Y方向に突出する凸部を有している。突出部49の凸部が取付係合部611の凹部にはまり込むことにより、突出部49と取付係合部611とが係合する。 As shown in FIGS. 24 to 26, in the side view, the mounting
また、第2実施形態では、図16に示すように、基体61には、手術器具40が当接する当接部612が設けられている。当接部612は、基体61の第2面60bのY1方向の端部近傍に一対設けられている。また、一対の当接部612は、X方向に所定の間隔を隔てて配置されている。また、一対の当接部612は、手術器具40側(Z1方向側)に突出するように形成されている。当接部612は、手術器具40がアダプタ60に取り付けられた際に、手術器具40のハウジング43のY1方向側の端部に当接するように構成されている。 Further, in the second embodiment, as shown in FIG. 16, the
先行ガイド部69は、第1面60aおよび第2面60bに略平行で、かつ、手術器具40を案内する方向に直交する方向(X方向)において所定の間隔を隔てて略平行に一対設けられている。これにより、1つの先行ガイド部69により手術器具40をガイドする場合と比べて、手術器具40をアダプタ60の取り付け位置に安定して案内することができる。 A pair of leading
図21〜図23に示すように、一対の先行ガイド部69は、それぞれ、X方向における外側の面により手術器具40の突出部49を案内するように構成されている。つまり、X1方向側の先行ガイド部69は、X1方向側の側面により手術器具40の突出部49をY方向に案内する。また、X2方向側の先行ガイド部69は、X2方向側の側面により手術器具40の突出部49をY方向に案内する。 As shown in FIGS. 21 to 23, each of the pair of leading
また、図16に示すように、一対の先行ガイド部69は、スライド挿入方向上流側(Y2方向側)の端部が接続部691により互いに接続されている。これにより、一対の先行ガイド部69の端部を互いに接続することにより、一対の先行ガイド部69の機械的強度を向上させることができるので、一対の先行ガイド部69が撓んだりして変形するのを抑制することができる。これにより、一対の先行ガイド部69のガイド機能を確実に発揮させることができる。 Further, as shown in FIG. 16, the ends of the pair of leading
接続部691は、一対の先行ガイド部69が並ぶ方向(X方向)に延びるように形成されている。また、接続部691は、手術器具40側(Z1方向側)が凹むように形成されている。これにより、手術器具40を先行ガイド部69により案内しながらY1方向にスライドさせた場合に、手術器具40の取付面40aからZ2方向側に突出する第2電極アレイ48が、接続部691に干渉するのを抑制することができる。一対の先行ガイド部69および接続部691は、一体的に形成されている。これにより、一対の先行ガイド部69および接続部691を別体で形成する場合に比べて、部品点数を減少させることができる。 The connecting
また、第2実施形態では、第2面60bの第1のガイドレール63aおよび第2のガイドレール63bは、第1のガイドレール63aおよび第2のガイドレール63bのそれぞれの一端634(Y2方向側の端部)と、取付面40aの第1の案内溝45aおよび第2の案内溝45bのそれぞれの一端452(Y1方向側の端部)とを対応させてスライドさせることにより、複数の駆動伝達部材62の各々と、取付面40aに設けられた複数の回転部材44の各々とが対応するように手術器具40を案内するように構成されている。 Further, in the second embodiment, the
(ロボットアームへの手術器具の取り付け)
図17〜図20を参照して、第2実施形態によるロボットアーム21aへの手術器具40の取り付けについて説明する。(Attachment of surgical instruments to the robot arm)
The attachment of the
図17に示すように、ロボットアーム21aをドレープ70で覆った状態で、ロボットアーム21aにアダプタ60を取り付ける。アダプタ60は、ロボットアーム21aに対してZ方向に移動させて、ロボットアーム21aに取り付けられる。図18および図19に示すように、ロボットアーム21aに取り付けられたアダプタ60に対して手術器具40を取り付ける。手術器具40は、アダプタ60の先行ガイド部69、先行ガイドレール64および第1のガイドレール63aおよび第2のガイドレール63bに沿ってY方向に移動させて、アダプタ60に取り付けられる。これにより、図20に示すように、手術器具40がアダプタ60を介してロボットアーム21aに取り付けられる。 As shown in FIG. 17, the
手術器具40をロボットアーム21aから取り外す場合は、手術器具40の可動部材46のボタン461を押しながら、手術器具40をY2方向にスライド移動させることにより、手術器具40がアダプタ60から外される。 When the
(アダプタへの手術器具の取り付け)
図21〜図26を参照して、先行ガイド部69の案内によるアダプタ60への手術器具40の取り付けについて説明する。(Attachment of surgical instruments to the adapter)
The attachment of the
図21および図24に示すように、手術器具40の突出部49を、アダプタ60の先行ガイド部69に当接するように、手術器具40をアダプタ60のZ1方向側に位置させる。 As shown in FIGS. 21 and 24, the
図22および図25に示すように、先行ガイド部69により突出部49を案内させながら、手術器具40をY1方向に移動させる。この際、先行ガイドレール64により手術器具40が案内され、続いて、第1のガイドレール63aおよび第2のガイドレール63bにより手術器具40が案内される。 As shown in FIGS. 22 and 25, the
図23および図26に示すように、手術器具40がアダプタ60に装着されると、手術器具40の突出部49がアダプタ60の取付係合部611に係合される。 As shown in FIGS. 23 and 26, when the
なお、第2実施形態のその他の構成は、上記第1実施形態と同様である。 The other configurations of the second embodiment are the same as those of the first embodiment.
(変形例)
なお、今回開示された実施形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は、上記した実施形態の説明ではなく特許請求の範囲によって示され、さらに特許請求の範囲と均等の意味および範囲内でのすべての変更(変形例)が含まれる。(Modification example)
It should be noted that the embodiments disclosed this time are exemplary in all respects and are not considered to be restrictive. The scope of the present invention is shown by the scope of claims rather than the description of the above-described embodiment, and further includes all modifications (modifications) within the meaning and scope equivalent to the scope of claims.
たとえば、上記第1および第2実施形態では、アダプタの第2面に沿って手術器具をシャフトの延びる方向にスライド移動させることにより、着脱する構成の例を示したが、本発明はこれに限られない。本発明では、アダプタの第2面に沿って手術器具をシャフトの延びる方向と交差する方向にスライド移動させることにより、着脱させてもよい。 For example, in the first and second embodiments described above, an example of a configuration in which a surgical instrument is slid and moved in a direction in which a shaft extends along a second surface of an adapter is shown, but the present invention is limited to this. I can't. In the present invention, the surgical instrument may be attached and detached by sliding the surgical instrument along the second surface of the adapter in a direction intersecting the extending direction of the shaft.
また、上記第1実施形態では、平面視においてアダプタが略円形状を有する構成の例を示したが、本発明はこれに限られない。本発明では、アダプタの平面視における形状は略円形状でなくてもよい。たとえば、アダプタは、平面視において矩形形状を有していてもよい。 Further, in the first embodiment, an example of a configuration in which the adapter has a substantially circular shape in a plan view is shown, but the present invention is not limited to this. In the present invention, the shape of the adapter in a plan view does not have to be substantially circular. For example, the adapter may have a rectangular shape in plan view.
また、上記第1および第2実施形態では、アダプタに4つの駆動伝達部材が設けられている構成の例を示したが、本発明はこれに限られない。本発明では、アダプタに4つ以外の複数の駆動伝達部材が設けられていてもよい。 Further, in the first and second embodiments, an example of a configuration in which the adapter is provided with four drive transmission members has been shown, but the present invention is not limited to this. In the present invention, the adapter may be provided with a plurality of drive transmission members other than the four.
また、上記第1および第2実施形態では、アダプタとドレープとが別体に設けられている構成の例を示したが、本発明はこれに限られない。本発明では、アダプタとドレープとが一体的に設けられている構成でもよい。 Further, in the first and second embodiments, the example of the configuration in which the adapter and the drape are separately provided is shown, but the present invention is not limited to this. In the present invention, the adapter and the drape may be integrally provided.
21a:ロボットアーム、40:手術器具、40a:取付面、42:シャフト、44:回転部材、45:案内溝、45a:第1の案内溝、45b:第2の案内溝、47:先行案内溝、48:第2電極アレイ、49:突出部、60:アダプタ、60a:第1面、60b:第2面、61:基体、62:駆動伝達部材、62a:第1駆動伝達部材、62b:第2駆動伝達部材、63:ガイドレール、63a:第1のガイドレール、63b:第2のガイドレール、64:先行ガイドレール、65:第1電極アレイ、69:先行ガイド部、70:ドレープ、100:ロボット手術システム、441:第1突起部、442:第2突起部、443:第3突起部、451:係合溝、462:係合穴、482:突出部、611:取付係合部、621:第1部材、622:第2部材、623:付勢部材、624:係合部、624a:第1係合部、624b:第2係合部、625:第1凹部、626:第2凹部、631:レール部、632:張出部、633:爪部、652:溝、691:接続部 21a: Robot arm, 40: Surgical instrument, 40a: Mounting surface, 42: Shaft, 44: Rotating member, 45: Guide groove, 45a: First guide groove, 45b: Second guide groove, 47: Advance guide groove , 48: Second electrode array, 49: Projection, 60: Adapter, 60a: First surface, 60b: Second surface, 61: Base, 62: Drive transmission member, 62a: First drive transmission member, 62b: First 2 drive transmission member, 63: guide rail, 63a: first guide rail, 63b: second guide rail, 64: leading guide rail, 65: first electrode array, 69: leading guide section, 70: drape, 100 : Robotic surgery system, 441: 1st protrusion, 442: 2nd protrusion, 443: 3rd protrusion, 451: engagement groove, 462: engagement hole, 482: protrusion, 611: mounting engagement part, 621: 1st member, 622: 2nd member, 623: urging member, 624: engaging part, 624a: 1st engaging part, 624b: 2nd engaging part, 625: 1st recess, 626: second Recess, 631: Rail part, 632: Overhang part, 633: Claw part, 652: Groove, 691: Connection part
Claims (19)
Translated fromJapanese前記ロボットアームに取り付けるための第1面と、前記手術器具の取付面が装着される第2面と、を含む基体と、
前記基体に回転可能に設けられた複数の駆動伝達部材と、を備え、
前記基体の前記第2面は、前記取付面に設けられた第1および第2の案内溝にそれぞれ対応する第1および第2のガイドレールを有し、
前記第2面の前記第1および第2のガイドレールは、前記取付面の前記第1および第2の案内溝に挿入され、前記手術器具をスライドさせて前記複数の駆動伝達部材の各々と、前記取付面に設けられた複数の回転部材の各々とが対応するように前記手術器具を案内するように構成されており、
前記第1および第2のガイドレールは、それぞれ、前記第1および第2の案内溝に設けられた係合穴に係合する爪部を有している、アダプタ。An adapter for detachably connecting surgical instruments to the robot arm of a robotic surgery system.
A substrate including a first surface for mounting on the robot arm and a second surface on which the mounting surface of the surgical instrument is mounted.
A plurality of drive transmission members rotatably provided on the substrate are provided.
The second surface of the substrate has first and second guide rails corresponding to the first and second guide grooves provided on the mounting surface, respectively.
The first and second guide rails on the second surface are inserted into the first and second guide grooves on the mounting surface, and the surgical instrument is slid with each of the plurality of drive transmission members. Itis configured to guide the surgical instrument so as to correspond to each of the plurality of rotating members provided on the mounting surface.
An adapter inwhich the first and second guide rails have claws that engage with engagement holes provided in the first and second guide grooves, respectively .
前記ロボットアームに取り付けるための第1面と、前記手術器具の取付面が装着される第2面と、を含む基体と、A substrate including a first surface for mounting on the robot arm and a second surface on which the mounting surface of the surgical instrument is mounted.
前記基体に回転可能に設けられた複数の駆動伝達部材と、を備え、A plurality of drive transmission members rotatably provided on the substrate are provided.
前記基体の前記第2面は、前記取付面に設けられた第1および第2の案内溝にそれぞれ対応する第1および第2のガイドレールを有し、The second surface of the substrate has first and second guide rails corresponding to the first and second guide grooves provided on the mounting surface, respectively.
前記第2面の前記第1および第2のガイドレールは、前記取付面の前記第1および第2の案内溝に挿入され、前記手術器具をスライドさせて前記複数の駆動伝達部材の各々と、前記取付面に設けられた複数の回転部材の各々とが対応するように前記手術器具を案内するように構成されており、The first and second guide rails on the second surface are inserted into the first and second guide grooves on the mounting surface, and the surgical instrument is slid with each of the plurality of drive transmission members. It is configured to guide the surgical instrument so as to correspond to each of the plurality of rotating members provided on the mounting surface.
前記複数の駆動伝達部材は、それぞれ、前記取付面に設けられた対応する回転部材に係合する係合部を含み、Each of the plurality of drive transmission members includes an engaging portion that engages with a corresponding rotating member provided on the mounting surface.
前記係合部は、前記複数の駆動伝達部材のうちスライド挿入方向上流側に位置する第1駆動伝達部材に設けられた第1係合部と、前記複数の駆動伝達部材のうちスライド挿入方向下流側に位置する第2駆動伝達部材に設けられた第2係合部と、を有し、The engaging portion includes a first engaging portion provided on the first drive transmission member located on the upstream side of the plurality of drive transmission members in the slide insertion direction, and downstream of the plurality of drive transmission members in the slide insertion direction. It has a second engaging portion provided on the second drive transmission member located on the side, and has.
前記第1係合部は、前記手術器具をスライドさせて前記アダプタに取り付ける場合に、前記第2係合部に係合する前記回転部材が係合しない形状を有している、アダプタ。The first engaging portion is an adapter having a shape in which the rotating member that engages with the second engaging portion does not engage when the surgical instrument is slid and attached to the adapter.
前記ロボットアームに取り付けるための第1面と、前記手術器具の取付面が装着される第2面と、を含む基体と、A substrate including a first surface for mounting on the robot arm and a second surface on which the mounting surface of the surgical instrument is mounted.
前記基体に回転可能に設けられた複数の駆動伝達部材と、を備え、A plurality of drive transmission members rotatably provided on the substrate are provided.
前記基体の前記第2面は、前記取付面に設けられた第1および第2の案内溝にそれぞれ対応する第1および第2のガイドレールを有し、The second surface of the substrate has first and second guide rails corresponding to the first and second guide grooves provided on the mounting surface, respectively.
前記第2面の前記第1および第2のガイドレールは、前記取付面の前記第1および第2の案内溝に挿入され、前記手術器具をスライドさせて前記複数の駆動伝達部材の各々と、前記取付面に設けられた複数の回転部材の各々とが対応するように前記手術器具を案内するように構成されており、The first and second guide rails on the second surface are inserted into the first and second guide grooves on the mounting surface, and the surgical instrument is slid with each of the plurality of drive transmission members. It is configured to guide the surgical instrument so as to correspond to each of the plurality of rotating members provided on the mounting surface.
前記第1および第2のガイドレールの延びる方向と平行な方向に沿って前記基体から突出するように形成され、前記第1および第2のガイドレールよりも先行して前記手術器具を案内する先行ガイド部をさらに備える、アダプタ。It is formed so as to project from the substrate along a direction parallel to the extending direction of the first and second guide rails, and guides the surgical instrument ahead of the first and second guide rails. An adapter with an additional guide section.
前記第2面の前記第1および第2のガイドレールは、前記第2部材の前記第1部材に対する移動方向と交差する方向に、前記手術器具の前記第1および第2の案内溝を案内するように構成されている、請求項1〜3のいずれか1項に記載のアダプタ。The drive transmission member includes a first member and a second member movably provided with respect to the first member via an urging member.
The first and second guide rails on the second surface guide the first and second guide grooves of the surgical instrument in a direction intersecting the moving direction of the second member with respect to the first member. The adapter according toany one of claims 1 to3 , which is configured as described above.
前記係合部は、前記複数の駆動伝達部材のうちスライド挿入方向上流側に位置する第1駆動伝達部材に設けられた第1係合部と、前記複数の駆動伝達部材のうちスライド挿入方向下流側に位置する第2駆動伝達部材に設けられ、前記第1係合部と異なる形状を有する第2係合部と、を有している、請求項1または3に記載のアダプタ。Each of the plurality of drive transmission members includes an engaging portion that engages with a corresponding rotating member provided on the mounting surface.
The engaging portion includes a first engaging portion provided on the first drive transmission member located on the upstream side of the plurality of drive transmission members in the slide insertion direction, and downstream of the plurality of drive transmission members in the slide insertion direction. The adapter according to claim1 or 3 , which is provided on a second drive transmission member located on the side and has a second engaging portion having a shape different from that of the first engaging portion.
前記第2駆動伝達部材の前記第2面側には、前記第2係合部として、前記第1凹部および前記第2凹部がつながった形状の1つの凹部が形成されており、
前記取付面に設けられた複数の前記回転部材のうち前記第1駆動伝達部材に係合する第1回転部材は、前記第1凹部および前記第2凹部に挿入される第1突起部および第2突起部を有しており、
前記取付面に設けられた複数の前記回転部材のうち前記第2駆動伝達部材に係合する第2回転部材は、前記1つの凹部に挿入される前記第1突起部と、前記第2突起部と、前記第1突起部および前記第2突起部の間に配置された第3突起部と、を有している、請求項2、10または11に記載のアダプタ。A first recess and a second recess are independently formed as the first engaging portion on the second surface side of the first drive transmission member.
On the second surface side of the second drive transmission member, one recess having a shape in which the first recess and the second recess are connected is formed as the second engaging portion.
Of the plurality of rotating members provided on the mounting surface, the first rotating member that engages with the first drive transmission member is a first protrusion and a second that are inserted into the first recess and the second recess. It has a protrusion and
Of the plurality of rotating members provided on the mounting surface, the second rotating member that engages with the second drive transmission member includes the first protrusion inserted into the one recess and the second protrusion. The adapter according to claim2, 10 or 11 , further comprising a first protrusion and a third protrusion arranged between the first protrusions.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910751267.7ACN110859671B (en) | 2018-08-28 | 2019-08-15 | Adapter and method for mounting surgical instrument to robot arm via adapter |
| US16/542,300US11642186B2 (en) | 2018-08-28 | 2019-08-16 | Adaptor and method of attaching surgical instrument to robot arm through adaptor |
| EP19193766.3AEP3616642B1 (en) | 2018-08-28 | 2019-08-27 | Adaptor and method of attaching surgical instrument to robot arm through adaptor |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018159332 | 2018-08-28 | ||
| JP2018159332 | 2018-08-28 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021000769ADivisionJP7035229B2 (en) | 2018-08-28 | 2021-01-06 | adapter |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2020032162A JP2020032162A (en) | 2020-03-05 |
| JP6821735B2true JP6821735B2 (en) | 2021-01-27 |
Family
ID=69666334
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019063447AActiveJP6821735B2 (en) | 2018-08-28 | 2019-03-28 | adapter |
| JP2021000769AActiveJP7035229B2 (en) | 2018-08-28 | 2021-01-06 | adapter |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021000769AActiveJP7035229B2 (en) | 2018-08-28 | 2021-01-06 | adapter |
Country Status (1)
| Country | Link |
|---|---|
| JP (2) | JP6821735B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3888523A1 (en)* | 2020-03-30 | 2021-10-06 | Medicaroid Corporation | Endoscope adaptor, robotic surgical system, method of adjusting rotational position using endoscope adaptor |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114098845B (en)* | 2020-08-28 | 2023-07-25 | 中国科学院沈阳自动化研究所 | A modular surgical robot driving device |
| CN114305691B (en)* | 2020-09-28 | 2025-09-16 | 北京术锐机器人股份有限公司 | Sterile drape system of surgical robot and covering method |
| CN114271941B (en)* | 2020-09-28 | 2025-07-11 | 北京术锐机器人股份有限公司 | A surgical robot system |
| JP2024508759A (en)* | 2021-02-17 | 2024-02-28 | オーリス ヘルス インコーポレイテッド | Medical instrument drive assembly and docking system |
| CN118662235B (en)* | 2023-03-17 | 2025-09-16 | 北京术锐机器人股份有限公司 | Connecting adapter capable of transmitting linear motion, connecting assembly and surgical robot system |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09272091A (en)* | 1996-04-09 | 1997-10-21 | Olympus Optical Co Ltd | Robot hand automatic changer |
| JP5043414B2 (en)* | 2005-12-20 | 2012-10-10 | インテュイティブ サージカル インコーポレイテッド | Aseptic surgical adapter |
| CN104706426A (en)* | 2009-09-23 | 2015-06-17 | 伊顿株式会社 | Sterile adapter, connection structure of wheel and connection structure of surgical instrument |
| US9408606B2 (en) | 2012-06-28 | 2016-08-09 | Ethicon Endo-Surgery, Llc | Robotically powered surgical device with manually-actuatable reversing system |
| CN108784838B (en)* | 2013-08-15 | 2021-06-08 | 直观外科手术操作公司 | Instrument sterile adapter drive interface |
| US10595836B2 (en) | 2014-03-17 | 2020-03-24 | Intuitive Surgical Operations, Inc. | Systems and methods for confirming disc engagement |
| CN113729964B (en)* | 2015-04-27 | 2024-08-02 | 直观外科手术操作公司 | Surgical instrument housing and related systems and methods |
| BR112019010623B1 (en) | 2016-12-20 | 2023-01-24 | Verb Surgical Inc | SYSTEM FOR USE IN A ROBOTIC SURGICAL SYSTEM AND METHOD OF OPERATING A ROBOTIC SURGICAL SYSTEM |
- 2019
- 2019-03-28JPJP2019063447Apatent/JP6821735B2/enactiveActive
- 2021
- 2021-01-06JPJP2021000769Apatent/JP7035229B2/enactiveActive
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3888523A1 (en)* | 2020-03-30 | 2021-10-06 | Medicaroid Corporation | Endoscope adaptor, robotic surgical system, method of adjusting rotational position using endoscope adaptor |
| US11944268B2 (en) | 2020-03-30 | 2024-04-02 | Medicaroid Corporation | Endoscope adaptor, robotic surgical system, method of adjusting rotational position using endoscope adaptor |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2021053470A (en) | 2021-04-08 |
| JP7035229B2 (en) | 2022-03-14 |
| JP2020032162A (en) | 2020-03-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6772226B2 (en) | Surgical instruments | |
| JP6821735B2 (en) | adapter | |
| US11642186B2 (en) | Adaptor and method of attaching surgical instrument to robot arm through adaptor | |
| US11234777B2 (en) | Adaptor and robotic surgical system | |
| JP6971284B2 (en) | Adapter set and adapter | |
| JP6745306B2 (en) | Adapter and connection method | |
| JP6823022B2 (en) | Drive interface | |
| US12082891B2 (en) | Robotic surgical apparatus, surgical instrument, and method of attaching surgical instrument to robot arm | |
| US11642187B2 (en) | Surgical instrument, assembly including adaptor and surgical instrument, and robotic surgical system | |
| US11266386B2 (en) | Adapter, robotic surgical system, and adapter attaching method | |
| JP6839220B2 (en) | How to detect the attachment of surgical instruments to the drive interface, adapter, and drive interface | |
| US20220117691A1 (en) | Adaptor, method of detaching adaptor from robot arm, and robotic surgical system | |
| EP3811883A1 (en) | Surgical instrument |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20190809 | |
| A621 | Written request for application examination | Free format text:JAPANESE INTERMEDIATE CODE: A621 Effective date:20190809 | |
| A977 | Report on retrieval | Free format text:JAPANESE INTERMEDIATE CODE: A971007 Effective date:20200722 | |
| A131 | Notification of reasons for refusal | Free format text:JAPANESE INTERMEDIATE CODE: A131 Effective date:20200818 | |
| A521 | Request for written amendment filed | Free format text:JAPANESE INTERMEDIATE CODE: A523 Effective date:20201009 | |
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) | Free format text:JAPANESE INTERMEDIATE CODE: A01 Effective date:20201208 | |
| A61 | First payment of annual fees (during grant procedure) | Free format text:JAPANESE INTERMEDIATE CODE: A61 Effective date:20210106 | |
| R150 | Certificate of patent or registration of utility model | Ref document number:6821735 Country of ref document:JP Free format text:JAPANESE INTERMEDIATE CODE: R150 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 | |
| R250 | Receipt of annual fees | Free format text:JAPANESE INTERMEDIATE CODE: R250 |